
計測方法および計測プログラムならびに計測装置
【課題】大掛かりな設備や人員を必要とすることなく、単一の画像データにて簡易かつ高精度に、土木構造物や建築構造物等の被測定物の測定や継続的な監視を行う。
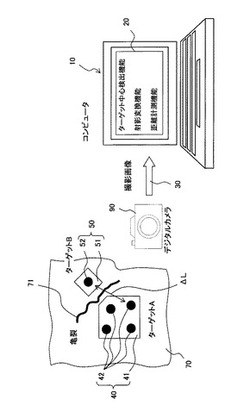
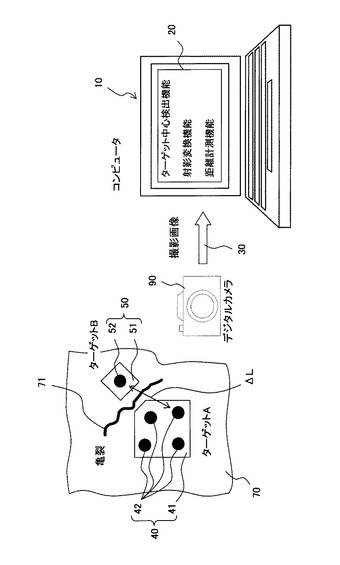
【解決手段】土木構造物や建築構造物等の構造物70に、固定ターゲットマーク42の位置関係が既知の第1ターゲット40と、別の第2ターゲット50を、構造物70に存在する亀裂71等の境界を挟んで独立に配置し、これらの画像をデジタルカメラ90にて任意の位置および方向から撮影して得られた画像データ30を情報処理装置10に入力して計測プログラム20にて処理することで、単一の画像データ30から、構造物70等に対して非接触にて、第1ターゲット40と第2ターゲット50の距離ΔLを計測する。
【解決手段】土木構造物や建築構造物等の構造物70に、固定ターゲットマーク42の位置関係が既知の第1ターゲット40と、別の第2ターゲット50を、構造物70に存在する亀裂71等の境界を挟んで独立に配置し、これらの画像をデジタルカメラ90にて任意の位置および方向から撮影して得られた画像データ30を情報処理装置10に入力して計測プログラム20にて処理することで、単一の画像データ30から、構造物70等に対して非接触にて、第1ターゲット40と第2ターゲット50の距離ΔLを計測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、計測方法および計測プログラムならびに計測装置に関する。
【背景技術】
【0002】
例えば、土木構造物や建築構造物等においては、保守管理等の目的で局所的な変形等を継続的に観測し、保守管理や安全管理の対策の目安とする場合がある。
その場合、対象物の運動量や変位・変形については、直接人間が器具を用いて測定する方法が考えられるが、測定箇所が構造物の天井等の高所に存在する場合のように測定対象に容易に近づけない場合などでは測定が困難である。
【0003】
また、ひずみ計などを設置し、データを遠隔地で収集し測定する方法も考えられるが、設備が大掛かりになる。
さらに、測量機器等を用いて測定する方法等も考えられるが、高価な測量機器や、機器の運用のための人員が必要となり、継続的な観測の場合には、その都度、測量機器や人員の準備が必要となる。
【0004】
このため、例えば、特許文献1や特許文献2のように、測定箇所を写真撮影する写真測量が考えられる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3530978号公報
【特許文献2】特許第4145484号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来の写真測量では、現場の複数の写真の多数の標定点を配置して撮影し、繰返し重ねあわせ、標定して3次元座標値を取得する必要があり、高度で複雑な作業が必須であり、大かがりな設備や、多数の人員を要するという技術的課題がある。
【0007】
本発明の目的は、大掛かりな設備や人員を必要とすることなく、単一の画像データにて簡易かつ高精度に、土木構造物や建築構造物等の被測定物の測定や継続的な監視を行うことが可能な計測技術を提供することにある。
【課題を解決するための手段】
【0008】
本発明の第1の観点は、被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像が同一画面内に含まれるように撮影して単一の画像データを得る第1ステップと、
前記画像データから、複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出する第2ステップと、
前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する第3ステップと、
を含む計測方法を提供する。
【0009】
本発明の第2の観点は、被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像を同一画面内に含む単一の画像データを入力する第1ステップと、
前記画像データから、複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出する第2ステップと、
前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する第3ステップと、
をコンピュータに実行させる計測プログラムを提供する。
【0010】
本発明の第3の観点は、被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像を同一画面内に含む画像データを入力する入力手段と、
単一の前記画像データから複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出し、前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する演算手段と、
を含む計測装置を提供する。
【発明の効果】
【0011】
本発明によれば、大掛かりな設備や人員を必要とすることなく、単一の画像データにて簡易かつ高精度に、土木構造物や建築構造物等の被測定物の測定や継続的な監視を行うことが可能な計測技術を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施の形態である計測方法および計測プログラムならびに計測装置のシステム構成および作用の一例を示す概念図である。
【図2】本発明の一実施の形態である計測方法および計測プログラムを実施する計測装置の構成の一例を示す概念図である。
【図3】本発明の一実施の形態である計測方法および計測プログラムならびに計測装置にて用いられる計測ファイルの構成例を示す概念図である。
【図4】本発明の一実施の形態である計測方法の工程全体の一例を示すフローチャートである。
【図5】本発明の一実施の形態である計測プログラムによる距離計測処理の一例を示すフローチャートである。
【図6】本発明の一実施の形態である計測方法における正射影画像の画像データの一例を示す概念図である。
【図7】本発明の一実施の形態である計測方法における斜め方向の撮影画像の一例を示す概念図である。
【図8】本発明の一実施の形態である計測方法における斜め方向の撮影画像の一例を示す概念図である。
【図9】ターゲットマークの中心座標を画像より精密に求める方法の一例を示す概念図である。
【図10】本発明の一実施の形態である計測方法における座標定義の一例を示す概念図である。
【図11】後方交会法における共線条件を示す概念図である。
【発明を実施するための形態】
【0013】
本発明の実施の形態では、一態様として、複数個の固定ターゲットにより平面を設定し、単写真での位置座標の取得と距離計測を行う画像計測技術、およびそれによる精密距離計測技術、移動量計測技術を例示する。
【0014】
本態様では、デジタルカメラ等により撮影された測定対象物の写真画像に含まれる3点以上の固定ターゲットと少なくとも一つの対象ターゲットの画像のうち、複数の固定ターゲットの画像から一つの平面を構成し、この平面上にある他の対象ターゲットの2次元座標を画像計測により取得する。
【0015】
すなわち、複数の固定ターゲットの上記平面上の2次元座標が予め任意の尺度で既知であれば、同一平面上にある他の対象ターゲットの2次元座標を決定することができ、固定ターゲットと対象ターゲットとの間の距離を計算により求めれば距離計測ができる。
【0016】
また、固定ターゲットと他の対象ターゲットの間に、不連続な境界がある場合、境界の変動前後に固定ターゲットおよび対象ターゲットの撮影および画像計測を行い、固定ターゲットの座標を、境界の変動の前後で一致させることにより、他の対象ターゲットの境界の変動の前後の座標を得て、境界の変動の前後における固定ターゲットと対象ターゲットの間の距離を計算することで、境界の両側の移動量を計測することができる。
【0017】
すなわち、単一写真の画像データにて簡便に、計測対象物に接触することなく離れた位置から測定対象物の変形等を高精度に継続的に計測することができる。
これにより、本態様によれば、例えば道路構造物に設けられた伸縮装置などの保守管理において、交通荷重や温度変化などに追随した移動量を設計値と比較して健全性を評価したり、斜面上の岩塊や斜面やコンクリート構造物のクラックのように変形量が経時的に変化する可能性がある構造物等を評価する場合のように、変形量が大きくなると重大な危険をもたらすものを監視する場合に、遠隔点から非接触に簡易かつ精密に計測する手段を提供することができる。
【0018】
また、平面的な変位を伴う変形量の簡易かつ高精度な非接触な計測のための手段を提供することができる。
以下、図面を参照しながら、本発明の実施の形態について詳細に説明する。
【0019】
図1は、本発明の一実施の形態である計測方法および計測プログラムならびに計測装置の構成および作用の一例を示す概念図である。
図2は、本発明の一実施の形態である計測方法および計測プログラムを実施する計測装置の構成の一例を示す概念図である。
【0020】
図3は、本発明の一実施の形態である計測方法および計測プログラムならびに計測装置にて用いられる計測ファイルの構成例を示す概念図である。
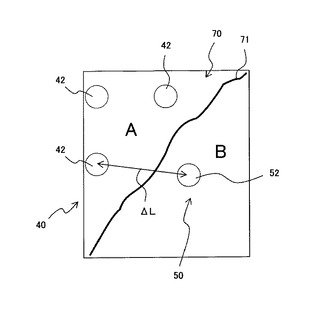
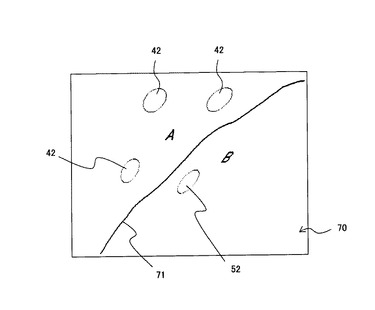
図1に例示されるように、本実施の形態の計測方法では、土木構造物や建築構造物等の構造物70に第1ターゲット40および第2ターゲット50を、例えば構造物70に存在する亀裂71等の境界を挟んで独立に配置し、これらの画像をデジタルカメラ90にて任意の位置および方向から撮影して得られた画像データ30を情報処理装置10に入力し、後述の計測プログラム20にて処理することで、単一の画像データ30から、構造物70等に対して非接触にて、第1ターゲット40と第2ターゲット50の距離ΔLを計測する。
【0021】
本実施の形態の場合、デジタルカメラ90は、例えば、市販のデジタルスチルカメラからなり、デジタルカメラ90から得られる画像データ30には、画像情報の他に撮影時のレンズ焦点距離f、画素数、画像サイズ等の付帯情報も所定のフォーマット(例えば、デジタルスチルカメラ用画像ファイルフォーマット規格であるExif)で記録され、情報処理装置10に入力される。
【0022】
なお、デジタルカメラ90としてデジタルビデオカメラを用い、その一コマの静止画像を画像データ30として用いてもよい。
本実施の形態の第1ターゲット40は、例えば、裏面が粘着性の樹脂フィルム等からなる白地の基材41の表面に3個以上の複数の固定ターゲットマーク42を、例えば、黒色で既知の位置関係で印刷することで作成されている。
【0023】
同様に、第2ターゲット50は、例えば、裏面が粘着性の樹脂フィルムや台紙、金属板等からなる白地の基材51の表面に1個以上の対象ターゲットマーク52を、例えば、黒色で既知の位置関係で印刷することで作成されている。
【0024】
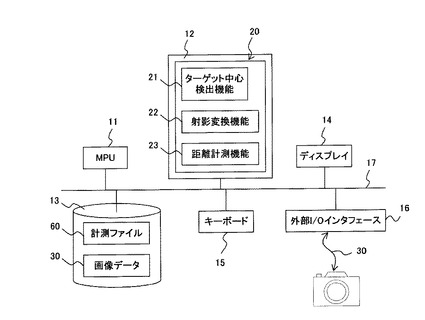
一方、図2に例示されるように、本実施の形態の計測装置としての情報処理装置10は、一例として、市販のパーソナルコンピュータ等からなり、マイクロプロセッサ11、主記憶12、記憶装置13、ディスプレイ14、キーボード15、外部入出力インタフェース16等の構成要素を情報伝送路17で接続して構成されている。
【0025】
マイクロプロセッサ11は、中央処理装置として、主記憶12に格納された計測プログラム20を実行することにより、後述のフローチャート等に例示される各種の処理を実現する。
【0026】
主記憶12は、例えば、半導体メモリ等で構成され、マイクロプロセッサ11がアクセスする計測プログラム20や図示しない基本ソフトウェア等のプログラムやデータを保持する。
【0027】
記憶装置13は、例えば、不揮発性の記録媒体で構成され、後述の計測ファイル60や画像データ30等のデータを保持する。
ディスプレイ14は、情報処理装置10のユーザに対して情報を可視化して提示する。
【0028】
キーボード15は、図示しないマウス等の入力手段とともに、ユーザに情報入力インタフェースを提供する。
外部入出力インタフェース16は、有線、あるいは無線、光線等の通信媒体を介して、デジタルカメラ90との間で、画像データ30等の情報の授受を行う機能を備えている。
【0029】
本実施の形態の情報処理装置10の場合、記憶装置13には、上述の第1ターゲット40および第2ターゲット50に関する計測結果を記録するための計測ファイル60が格納されている。
【0030】
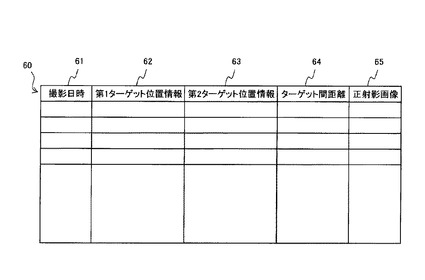
図3に例示されるように、この計測ファイル60は、撮影日時61、第1ターゲット位置情報62、第2ターゲット位置情報63、ターゲット間距離64、正射影画像65が、が対応つけられて格納されている。
【0031】
撮影日時61には、上述のように構造物70に配置された第1ターゲット40および第2ターゲット50の撮影日時が記録される。
第1ターゲット位置情報62には、第1ターゲット40の個々の固定ターゲットマーク42の位置情報が記録される。
【0032】
第2ターゲット位置情報63には、第2ターゲット50の対象ターゲットマーク52の位置情報が記録される。
ターゲット間距離64には、第1ターゲット40の一つの固定ターゲットマーク42と、第2ターゲット50の一つの対象ターゲットマーク52の中心間の距離ΔLが記録される。
【0033】
正射影画像65には、第1ターゲット40および第2ターゲット50の任意の方向からの撮影画像を、正対した方向からの撮影画像に変換した正射影画像が記録される。
この正射影画像65は、必要に応じてディスプレイ14に表示させることにより、ユーザが目視で画像データ30を閲覧する際の作業性が向上する。
【0034】
以下、本実施の形態の計測方法および計測プログラムならびに計測装置の作用の一例について説明する。
図4は、本実施の形態の計測方法の工程全体の一例を示すフローチャートであり、図5は、その中における本実施の形態の計測プログラム20による距離計測処理の一例を示すフローチャートである。
【0035】
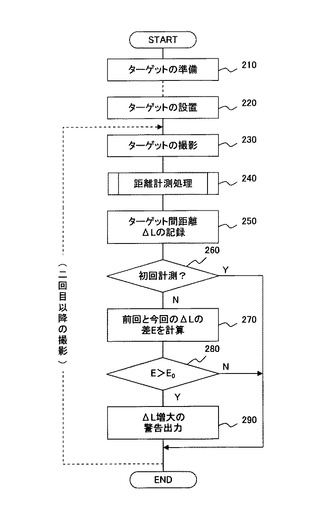
まず、上述のような第1ターゲット40および第2ターゲット50を作成して準備する(ステップ210)。
上述のように、この作成時には、第1ターゲット40では、複数の固定ターゲットマーク42が、一つの固定ターゲットマーク42を中心として直交する2軸の各々に、他の二つの固定ターゲットマーク42が配置される。そして、この第1ターゲット40における複数の固定ターゲットマーク42の位置関係(実座標値)が測定され、既知である。
【0036】
次に、図6のように、例えば、構造物70の任意の平面上の亀裂71に対して、第1ターゲット40(以下、必要に応じてA群のターゲットと記す)と、第2ターゲット50(B群のターゲット)を設置する(ステップ220)。
【0037】
本実施の形態の場合には、上述のように、A群のターゲットは実座標が既知でその間隔については予め求められているか、または自由に設定されていることを前提とする。
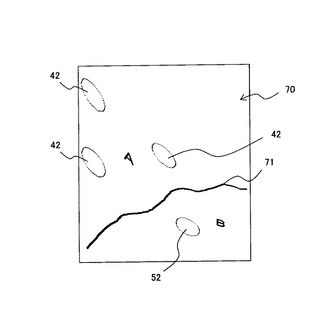
次に、構造物70に配置された第1ターゲット40および第2ターゲット50が同一画面内に入るように任意の方向から単一の画像として撮影し(例えば図7または図8)、画像データ30として情報処理装置10の記憶装置13に格納される(ステップ230)。
【0038】
次に、情報処理装置10において、画像データ30に基づいて、計測プログラム20による計測処理を行わせる(ステップ240)。
図5は、この計測プログラム20による処理の一例を示すフローチャートである。
【0039】
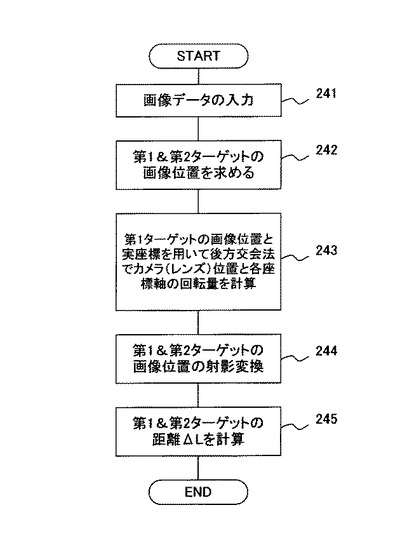
本実施の形態の場合、計測プログラム20は、ターゲット中心検出機能21、射影変換機能22、および距離計測機能23で構成されている。
計測プログラム20は、記憶装置13から画像データ30を読み出す(ステップ241)。
【0040】
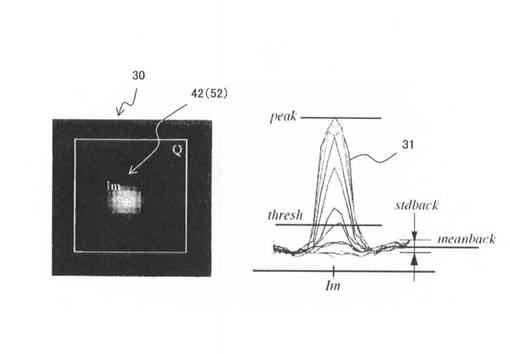
次に、ターゲット中心検出機能21によって、画像データ30の各ターゲット(個々の固定ターゲットマーク42および対象ターゲットマーク52)について、図9に示す通りターゲットの中心座標(画像座標)を画像より精密に求める。
【0041】
すなわち、ターゲット中心検出機能21は、画像データ30から、閾値(thresh)以上の明るさを有するピクセル31の隣接集団を一つの固定ターゲットマーク42または対象ターゲットマーク52と認識し、個々のピクセル31のピーク値(peak)と、その座標位置に基づいて当該隣接集団の重心位置を算出し、この重心位置を当該固定ターゲットマーク42または対象ターゲットマーク52の中心と決定する(ステップ242)。
【0042】
このように、個々の固定ターゲットマーク42および対象ターゲットマーク52の画像の部分の面積重心を求めることで、画像データ30における1画素サイズの1/10程度の精度で精密に、固定ターゲットマーク42および対象ターゲットマーク52の各々の中心位置の画像座標を求めることができる(ステップ242)。
【0043】
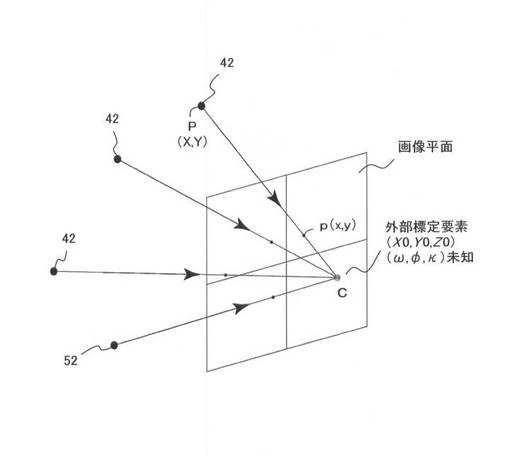
次に、計測プログラム20は、射影変換機能22により、上述のステップ242で求めた、位置関係(実座標)が既知の第1ターゲット40の固定ターゲットマーク42の当該実座標と、ステップ242で求められた個々の固定ターゲットマーク42の画像位置(中心位置)を用いて、後方交会法によって、当該画像データ30の撮影時におけるカメラ(レンズ中心)位置(X0,Y0,Z0)と、各座標軸の回転量(ω,φ,κ)を計算する(ステップ243)。
【0044】
すなわち、上述のステップ210およびステップ220の前提より、全ての固定ターゲットマーク42および対象ターゲットマーク52は同一平面上にあり、A群のターゲット(固定ターゲットマーク42)は座標が既知であることを元に3点の固定ターゲットマーク42の各々の中心位置の画像座標と、固定ターゲットマーク42の既知の位置座標(実座標)より写真測量における共線条件式(ターゲット位置、カメラ撮影位置およびターゲット画像座標の関係式)から、後方交会法によりカメラの撮影位置および撮影方向を決定することができる。
【0045】
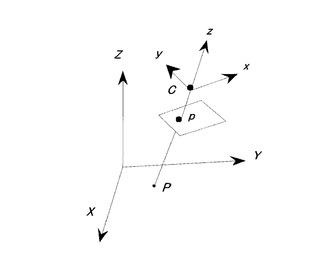
この計算の詳細を以下に示す。図10は、座標定義例を示す概念図であり、図11は、後方交会法における共線条件を示す概念図である。
図10のように座標定義を行った場合、後方交会法により、デジタルカメラ90の撮影位置および方向角(両者をあわせて外部標定要素と呼ぶ)を求める手順は以下の通りである。
【0046】
なお、図11において、レンズ中心と、構造物70上の実際の点Pおよび画像データ30上の点pの位置を示している。
図10において、原点がレンズ中心点Cである写真画像座標系(x,y)と、実座標系(X,Y,Z)およびレンズ焦点距離f、カメラ方向角(ω,φ,κ)の間は以下の式(1)の関係式が成り立つ。
【0047】
【数1】

【0048】
上記式(1)のω、φ、κはそれぞれ座標軸の回転量をあらわしており、撮影軸(レンズ光軸)に対しての回転角(ω)、撮影軸の垂直方向の回転角(φ)、水平方向の回転角(κ)を示す。また、(X0,Y0,X0)はレンズ中心点Cの実座標値を示す。λは適当な係数である。
【0049】
上記式(1)の回転部分を、以下の式(2)のように整理すると、上記式(1)は、以下の式(3)ように表記することができる。
【0050】
【数2】
【0051】
【数3】
【0052】
この式(3)を展開して、λを消去すると以下の式(4)および式(5)ように書きかえることができる。
【0053】
【数4】
【0054】
【数5】
【0055】
求める未知数(X0,Y0,Z0),(ω,φ,κ)に対して、3点(3個の固定ターゲットマーク42)の実座標(X1,Y1,0),(X2,Y2,0),(X3,Y3,0)、(条件として3点は同一平面上にありとしているためZ座標はいずれも0)と、3点の画像上の座標(x1,y1),(x2,y2),(x3,y3)およびレンズ焦点距離fが既知であるから、これらを連立させて未知数を求める。
【0056】
なお、レンズひずみについての影響を除外するための補正項を共線条件式の中に含めることも考えられるが、多くの場合、短焦点レンズによる撮影ではその影響度合いが大きく、長焦点レンズではその度合いは極めて小さい。
【0057】
本実施の形態では、被写体との位置関係を考慮しつつ、デジタルカメラ90において、長焦点レンズを用いて、撮影することで、レンズひずみの影響を計測精度以下におさえることができる。
【0058】
なお、例えば、個々の固定ターゲットマーク42の中心座標の計測誤差により、座標既知の3点の固定ターゲットマーク42の座標から計算で求めたカメラの撮影位置は不安定となるケースが発生するが、座標既知のターゲットを4点(四番目の固定ターゲットマーク42を第1ターゲット40に設ける)とし、各々が、4点のターゲットの中の任意の3点の組合せで決定される複数の平面に対して、共線条件式から方程式を導き、これを最小二乗法により解くことで、第1ターゲット40および第2ターゲット50が存在する一つの平面を決定することで、誤差配分が最適となる安定したカメラの撮影位置を求めることができる。
【0059】
次に、計測プログラム20は、射影変換機能22により、デジタルカメラ90の撮影位置およびA群のターゲットの位置から、撮影された画像データ30の射影変換を実施し、第1ターゲット40および第2ターゲット50を正面から撮影した画像を作成し、計測ファイル60の正射影画像65に記録する(ステップ244)。
【0060】
すなわち、図7や図8のように斜め方向から撮影された画像データ30を、正面から撮影した図6のような画像データ30に変換する。
また、正射影画像が不要な場合は、固定ターゲットマーク42および対象ターゲットマーク52の画像座標のみ射影変換を実施すれば、画像データ30の全体のピクセル31の射影変換を実施せずとも、次のステップ245で用いる固定ターゲットマーク42および対象ターゲットマーク52の座標(x,y)を提供できる。
【0061】
次に、計測プログラム20は、距離計測機能23により、上述のステップ244で変換した正射影画像よりA群のターゲットおよびBのターゲットの座標(x,y)を求め、それらの座標値を計算してターゲット間の距離ΔLを求める(ステップ245)。
【0062】
この距離ΔLは、たとえば、対象ターゲットマーク52と、直近の一つの固定ターゲットマーク42との距離である。
例えば、60cmの幅を、適切なレンズを装着した横幅3000画素のデジタルカメラ90で撮影した場合、1画素は0.2mmを示すことになる。図9およびステップ242にて説明した通り、1/10画素単位で固定ターゲットマーク42および対象ターゲットマーク52の各々の中心座標を求めることができれば、0.02mmの分解能で距離ΔLを計測することが可能になる。
【0063】
すなわち、一例として600万画素のデジタルカメラ90により撮影された画像データ30は横3000、縦2000ピクセルのデータである。適当なレンズを選定して、30cm×20cmの範囲を撮影した場合、1ピクセルのサイズは0.1mm×0.1mmとなる。
【0064】
固定ターゲットマーク42および対象ターゲットマーク52の各々の画像が、直径で20ピクセル程度のサイズで撮影されていれば、ターゲットマークの中心を重心検出により算出すると、上述の0.1mmの1/5から1/10程度の検出精度で算出することが可能となる。このため、0.02mm程度の位置決定精度を設定することができる。
【0065】
以上が、ステップ240における計測プログラム20による距離計測処理の一例である。
上述の図4のフローチャートに戻って、ステップ240で得られた距離ΔLは、計測プログラム20により計測ファイル60にターゲット間距離64として記録される。
【0066】
また、第1ターゲット40の個々の固定ターゲットマーク42の中心位置は、第1ターゲット位置情報62に記録され、第2ターゲット50の個々の対象ターゲットマーク52の中心位置は、第2ターゲット位置情報63に記録される。
【0067】
そして、ユーザは、構造物70に配置された同じ第1ターゲット40と第2ターゲット50のペアから前後して撮影された複数の画像データ30の各々から得られた距離ΔLを比較することにより、構造物70における亀裂71の拡大等の変位の情報を得ることができる。
【0068】
さらに、本実施の形態の場合、以下のようにして構造物70の変形の判定を計測プログラム20に自動的に行わせることもできる。
すなわち、計測プログラム20は、入力された画像データ30と同じ第1ターゲット40および第2ターゲット50に関する過去の画像データ30の記録を計測ファイル60から検索し、2回目以降の画像データ30である(初回撮影でない)と判定された場合には(ステップ260)、前回に計測されて記録されている距離ΔLと、今回得られた距離ΔLとを比較して両者の差分Eを計算し(ステップ270)、この差分Eが所定の判定閾値E0を超えた場合には(ステップ280)、ユーザに対して距離ΔLの増大、すなわち、構造物70の変形の増大を警告する(ステップ290)。
【0069】
なお、図4のフローチャートでは、同一の第1ターゲット40と第2ターゲット50のペアに対する二回目以降の撮影では、ステップ230から行われることになる。
このように、本実施の形態の計測技術によれば、例えば、構造物70の亀裂71を挟んで配置された第1ターゲット40と第2ターゲット50の画像を1画面内に含む単一の画像データ30を撮影するたけで、構造物70に対する任意の位置で非接触に、第1ターゲット40と第2ターゲット50の距離ΔLを精密に計測できる。
【0070】
この結果、同一の第1ターゲット40および第2ターゲット50の画像データ30を相前後して継続的に撮影することで、構造物70における亀裂71の拡大等の変位を精密に計測および監視できる。
【0071】
また、デジタルカメラ90で構造物70を、所定の期間をおいて段階的に撮影するだけなので、測量機器等の大かがりな設備や、多数の運用人員を必要としない。
すなわち、本実施の形態によれば、大掛かりな設備や人員を必要とすることなく、単一の画像データにて簡易かつ高精度に、土木構造物や建築構造物等の被測定物の測定や継続的な監視を行うことが可能な計測技術を提供することができる。
【0072】
なお、本発明は、上述の実施の形態に例示した構成に限らず、その趣旨を逸脱しない範囲で種々変更可能であることは言うまでもない。
例えば、第1ターゲット40の複数の固定ターゲットマーク42の座標値を自由に設定した仮想平面上で固定ターゲットマーク42および対象ターゲットマーク52の中心位置を決定することもできる。
【0073】
その場合には、距離ΔLは、第1ターゲット40の固定ターゲットマーク42同士の距離に対する比率として計測される。
また、第1ターゲット40や第2ターゲット50を配置する代わりに、構造物70に存在する寸法が既知の構成部材の画像を、第1ターゲット40および第2ターゲット50として用いてもよい。
【0074】
その場合には、第1ターゲット40や第2ターゲット50の配置作業も省略でき、構造物70の変形の計測や監視において、一層の省力化を実現できる利点がある。
【符号の説明】
【0075】
10 情報処理装置
11 マイクロプロセッサ
12 主記憶
13 記憶装置
14 ディスプレイ
15 キーボード
16 外部入出力インタフェース
17 情報伝送路
20 計測プログラム
21 ターゲット中心検出機能
22 射影変換機能
23 距離計測機能
30 画像データ
31 ピクセル
40 第1ターゲット
41 基材
42 固定ターゲットマーク
50 第2ターゲット
51 基材
52 対象ターゲットマーク
60 計測ファイル
61 撮影日時
62 第1ターゲット位置情報
63 第2ターゲット位置情報
64 ターゲット間距離
65 正射影画像
70 構造物
71 亀裂
90 デジタルカメラ
【技術分野】
【0001】
本発明は、計測方法および計測プログラムならびに計測装置に関する。
【背景技術】
【0002】
例えば、土木構造物や建築構造物等においては、保守管理等の目的で局所的な変形等を継続的に観測し、保守管理や安全管理の対策の目安とする場合がある。
その場合、対象物の運動量や変位・変形については、直接人間が器具を用いて測定する方法が考えられるが、測定箇所が構造物の天井等の高所に存在する場合のように測定対象に容易に近づけない場合などでは測定が困難である。
【0003】
また、ひずみ計などを設置し、データを遠隔地で収集し測定する方法も考えられるが、設備が大掛かりになる。
さらに、測量機器等を用いて測定する方法等も考えられるが、高価な測量機器や、機器の運用のための人員が必要となり、継続的な観測の場合には、その都度、測量機器や人員の準備が必要となる。
【0004】
このため、例えば、特許文献1や特許文献2のように、測定箇所を写真撮影する写真測量が考えられる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3530978号公報
【特許文献2】特許第4145484号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来の写真測量では、現場の複数の写真の多数の標定点を配置して撮影し、繰返し重ねあわせ、標定して3次元座標値を取得する必要があり、高度で複雑な作業が必須であり、大かがりな設備や、多数の人員を要するという技術的課題がある。
【0007】
本発明の目的は、大掛かりな設備や人員を必要とすることなく、単一の画像データにて簡易かつ高精度に、土木構造物や建築構造物等の被測定物の測定や継続的な監視を行うことが可能な計測技術を提供することにある。
【課題を解決するための手段】
【0008】
本発明の第1の観点は、被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像が同一画面内に含まれるように撮影して単一の画像データを得る第1ステップと、
前記画像データから、複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出する第2ステップと、
前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する第3ステップと、
を含む計測方法を提供する。
【0009】
本発明の第2の観点は、被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像を同一画面内に含む単一の画像データを入力する第1ステップと、
前記画像データから、複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出する第2ステップと、
前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する第3ステップと、
をコンピュータに実行させる計測プログラムを提供する。
【0010】
本発明の第3の観点は、被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像を同一画面内に含む画像データを入力する入力手段と、
単一の前記画像データから複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出し、前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する演算手段と、
を含む計測装置を提供する。
【発明の効果】
【0011】
本発明によれば、大掛かりな設備や人員を必要とすることなく、単一の画像データにて簡易かつ高精度に、土木構造物や建築構造物等の被測定物の測定や継続的な監視を行うことが可能な計測技術を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施の形態である計測方法および計測プログラムならびに計測装置のシステム構成および作用の一例を示す概念図である。
【図2】本発明の一実施の形態である計測方法および計測プログラムを実施する計測装置の構成の一例を示す概念図である。
【図3】本発明の一実施の形態である計測方法および計測プログラムならびに計測装置にて用いられる計測ファイルの構成例を示す概念図である。
【図4】本発明の一実施の形態である計測方法の工程全体の一例を示すフローチャートである。
【図5】本発明の一実施の形態である計測プログラムによる距離計測処理の一例を示すフローチャートである。
【図6】本発明の一実施の形態である計測方法における正射影画像の画像データの一例を示す概念図である。
【図7】本発明の一実施の形態である計測方法における斜め方向の撮影画像の一例を示す概念図である。
【図8】本発明の一実施の形態である計測方法における斜め方向の撮影画像の一例を示す概念図である。
【図9】ターゲットマークの中心座標を画像より精密に求める方法の一例を示す概念図である。
【図10】本発明の一実施の形態である計測方法における座標定義の一例を示す概念図である。
【図11】後方交会法における共線条件を示す概念図である。
【発明を実施するための形態】
【0013】
本発明の実施の形態では、一態様として、複数個の固定ターゲットにより平面を設定し、単写真での位置座標の取得と距離計測を行う画像計測技術、およびそれによる精密距離計測技術、移動量計測技術を例示する。
【0014】
本態様では、デジタルカメラ等により撮影された測定対象物の写真画像に含まれる3点以上の固定ターゲットと少なくとも一つの対象ターゲットの画像のうち、複数の固定ターゲットの画像から一つの平面を構成し、この平面上にある他の対象ターゲットの2次元座標を画像計測により取得する。
【0015】
すなわち、複数の固定ターゲットの上記平面上の2次元座標が予め任意の尺度で既知であれば、同一平面上にある他の対象ターゲットの2次元座標を決定することができ、固定ターゲットと対象ターゲットとの間の距離を計算により求めれば距離計測ができる。
【0016】
また、固定ターゲットと他の対象ターゲットの間に、不連続な境界がある場合、境界の変動前後に固定ターゲットおよび対象ターゲットの撮影および画像計測を行い、固定ターゲットの座標を、境界の変動の前後で一致させることにより、他の対象ターゲットの境界の変動の前後の座標を得て、境界の変動の前後における固定ターゲットと対象ターゲットの間の距離を計算することで、境界の両側の移動量を計測することができる。
【0017】
すなわち、単一写真の画像データにて簡便に、計測対象物に接触することなく離れた位置から測定対象物の変形等を高精度に継続的に計測することができる。
これにより、本態様によれば、例えば道路構造物に設けられた伸縮装置などの保守管理において、交通荷重や温度変化などに追随した移動量を設計値と比較して健全性を評価したり、斜面上の岩塊や斜面やコンクリート構造物のクラックのように変形量が経時的に変化する可能性がある構造物等を評価する場合のように、変形量が大きくなると重大な危険をもたらすものを監視する場合に、遠隔点から非接触に簡易かつ精密に計測する手段を提供することができる。
【0018】
また、平面的な変位を伴う変形量の簡易かつ高精度な非接触な計測のための手段を提供することができる。
以下、図面を参照しながら、本発明の実施の形態について詳細に説明する。
【0019】
図1は、本発明の一実施の形態である計測方法および計測プログラムならびに計測装置の構成および作用の一例を示す概念図である。
図2は、本発明の一実施の形態である計測方法および計測プログラムを実施する計測装置の構成の一例を示す概念図である。
【0020】
図3は、本発明の一実施の形態である計測方法および計測プログラムならびに計測装置にて用いられる計測ファイルの構成例を示す概念図である。
図1に例示されるように、本実施の形態の計測方法では、土木構造物や建築構造物等の構造物70に第1ターゲット40および第2ターゲット50を、例えば構造物70に存在する亀裂71等の境界を挟んで独立に配置し、これらの画像をデジタルカメラ90にて任意の位置および方向から撮影して得られた画像データ30を情報処理装置10に入力し、後述の計測プログラム20にて処理することで、単一の画像データ30から、構造物70等に対して非接触にて、第1ターゲット40と第2ターゲット50の距離ΔLを計測する。
【0021】
本実施の形態の場合、デジタルカメラ90は、例えば、市販のデジタルスチルカメラからなり、デジタルカメラ90から得られる画像データ30には、画像情報の他に撮影時のレンズ焦点距離f、画素数、画像サイズ等の付帯情報も所定のフォーマット(例えば、デジタルスチルカメラ用画像ファイルフォーマット規格であるExif)で記録され、情報処理装置10に入力される。
【0022】
なお、デジタルカメラ90としてデジタルビデオカメラを用い、その一コマの静止画像を画像データ30として用いてもよい。
本実施の形態の第1ターゲット40は、例えば、裏面が粘着性の樹脂フィルム等からなる白地の基材41の表面に3個以上の複数の固定ターゲットマーク42を、例えば、黒色で既知の位置関係で印刷することで作成されている。
【0023】
同様に、第2ターゲット50は、例えば、裏面が粘着性の樹脂フィルムや台紙、金属板等からなる白地の基材51の表面に1個以上の対象ターゲットマーク52を、例えば、黒色で既知の位置関係で印刷することで作成されている。
【0024】
一方、図2に例示されるように、本実施の形態の計測装置としての情報処理装置10は、一例として、市販のパーソナルコンピュータ等からなり、マイクロプロセッサ11、主記憶12、記憶装置13、ディスプレイ14、キーボード15、外部入出力インタフェース16等の構成要素を情報伝送路17で接続して構成されている。
【0025】
マイクロプロセッサ11は、中央処理装置として、主記憶12に格納された計測プログラム20を実行することにより、後述のフローチャート等に例示される各種の処理を実現する。
【0026】
主記憶12は、例えば、半導体メモリ等で構成され、マイクロプロセッサ11がアクセスする計測プログラム20や図示しない基本ソフトウェア等のプログラムやデータを保持する。
【0027】
記憶装置13は、例えば、不揮発性の記録媒体で構成され、後述の計測ファイル60や画像データ30等のデータを保持する。
ディスプレイ14は、情報処理装置10のユーザに対して情報を可視化して提示する。
【0028】
キーボード15は、図示しないマウス等の入力手段とともに、ユーザに情報入力インタフェースを提供する。
外部入出力インタフェース16は、有線、あるいは無線、光線等の通信媒体を介して、デジタルカメラ90との間で、画像データ30等の情報の授受を行う機能を備えている。
【0029】
本実施の形態の情報処理装置10の場合、記憶装置13には、上述の第1ターゲット40および第2ターゲット50に関する計測結果を記録するための計測ファイル60が格納されている。
【0030】
図3に例示されるように、この計測ファイル60は、撮影日時61、第1ターゲット位置情報62、第2ターゲット位置情報63、ターゲット間距離64、正射影画像65が、が対応つけられて格納されている。
【0031】
撮影日時61には、上述のように構造物70に配置された第1ターゲット40および第2ターゲット50の撮影日時が記録される。
第1ターゲット位置情報62には、第1ターゲット40の個々の固定ターゲットマーク42の位置情報が記録される。
【0032】
第2ターゲット位置情報63には、第2ターゲット50の対象ターゲットマーク52の位置情報が記録される。
ターゲット間距離64には、第1ターゲット40の一つの固定ターゲットマーク42と、第2ターゲット50の一つの対象ターゲットマーク52の中心間の距離ΔLが記録される。
【0033】
正射影画像65には、第1ターゲット40および第2ターゲット50の任意の方向からの撮影画像を、正対した方向からの撮影画像に変換した正射影画像が記録される。
この正射影画像65は、必要に応じてディスプレイ14に表示させることにより、ユーザが目視で画像データ30を閲覧する際の作業性が向上する。
【0034】
以下、本実施の形態の計測方法および計測プログラムならびに計測装置の作用の一例について説明する。
図4は、本実施の形態の計測方法の工程全体の一例を示すフローチャートであり、図5は、その中における本実施の形態の計測プログラム20による距離計測処理の一例を示すフローチャートである。
【0035】
まず、上述のような第1ターゲット40および第2ターゲット50を作成して準備する(ステップ210)。
上述のように、この作成時には、第1ターゲット40では、複数の固定ターゲットマーク42が、一つの固定ターゲットマーク42を中心として直交する2軸の各々に、他の二つの固定ターゲットマーク42が配置される。そして、この第1ターゲット40における複数の固定ターゲットマーク42の位置関係(実座標値)が測定され、既知である。
【0036】
次に、図6のように、例えば、構造物70の任意の平面上の亀裂71に対して、第1ターゲット40(以下、必要に応じてA群のターゲットと記す)と、第2ターゲット50(B群のターゲット)を設置する(ステップ220)。
【0037】
本実施の形態の場合には、上述のように、A群のターゲットは実座標が既知でその間隔については予め求められているか、または自由に設定されていることを前提とする。
次に、構造物70に配置された第1ターゲット40および第2ターゲット50が同一画面内に入るように任意の方向から単一の画像として撮影し(例えば図7または図8)、画像データ30として情報処理装置10の記憶装置13に格納される(ステップ230)。
【0038】
次に、情報処理装置10において、画像データ30に基づいて、計測プログラム20による計測処理を行わせる(ステップ240)。
図5は、この計測プログラム20による処理の一例を示すフローチャートである。
【0039】
本実施の形態の場合、計測プログラム20は、ターゲット中心検出機能21、射影変換機能22、および距離計測機能23で構成されている。
計測プログラム20は、記憶装置13から画像データ30を読み出す(ステップ241)。
【0040】
次に、ターゲット中心検出機能21によって、画像データ30の各ターゲット(個々の固定ターゲットマーク42および対象ターゲットマーク52)について、図9に示す通りターゲットの中心座標(画像座標)を画像より精密に求める。
【0041】
すなわち、ターゲット中心検出機能21は、画像データ30から、閾値(thresh)以上の明るさを有するピクセル31の隣接集団を一つの固定ターゲットマーク42または対象ターゲットマーク52と認識し、個々のピクセル31のピーク値(peak)と、その座標位置に基づいて当該隣接集団の重心位置を算出し、この重心位置を当該固定ターゲットマーク42または対象ターゲットマーク52の中心と決定する(ステップ242)。
【0042】
このように、個々の固定ターゲットマーク42および対象ターゲットマーク52の画像の部分の面積重心を求めることで、画像データ30における1画素サイズの1/10程度の精度で精密に、固定ターゲットマーク42および対象ターゲットマーク52の各々の中心位置の画像座標を求めることができる(ステップ242)。
【0043】
次に、計測プログラム20は、射影変換機能22により、上述のステップ242で求めた、位置関係(実座標)が既知の第1ターゲット40の固定ターゲットマーク42の当該実座標と、ステップ242で求められた個々の固定ターゲットマーク42の画像位置(中心位置)を用いて、後方交会法によって、当該画像データ30の撮影時におけるカメラ(レンズ中心)位置(X0,Y0,Z0)と、各座標軸の回転量(ω,φ,κ)を計算する(ステップ243)。
【0044】
すなわち、上述のステップ210およびステップ220の前提より、全ての固定ターゲットマーク42および対象ターゲットマーク52は同一平面上にあり、A群のターゲット(固定ターゲットマーク42)は座標が既知であることを元に3点の固定ターゲットマーク42の各々の中心位置の画像座標と、固定ターゲットマーク42の既知の位置座標(実座標)より写真測量における共線条件式(ターゲット位置、カメラ撮影位置およびターゲット画像座標の関係式)から、後方交会法によりカメラの撮影位置および撮影方向を決定することができる。
【0045】
この計算の詳細を以下に示す。図10は、座標定義例を示す概念図であり、図11は、後方交会法における共線条件を示す概念図である。
図10のように座標定義を行った場合、後方交会法により、デジタルカメラ90の撮影位置および方向角(両者をあわせて外部標定要素と呼ぶ)を求める手順は以下の通りである。
【0046】
なお、図11において、レンズ中心と、構造物70上の実際の点Pおよび画像データ30上の点pの位置を示している。
図10において、原点がレンズ中心点Cである写真画像座標系(x,y)と、実座標系(X,Y,Z)およびレンズ焦点距離f、カメラ方向角(ω,φ,κ)の間は以下の式(1)の関係式が成り立つ。
【0047】
【数1】
【0048】
上記式(1)のω、φ、κはそれぞれ座標軸の回転量をあらわしており、撮影軸(レンズ光軸)に対しての回転角(ω)、撮影軸の垂直方向の回転角(φ)、水平方向の回転角(κ)を示す。また、(X0,Y0,X0)はレンズ中心点Cの実座標値を示す。λは適当な係数である。
【0049】
上記式(1)の回転部分を、以下の式(2)のように整理すると、上記式(1)は、以下の式(3)ように表記することができる。
【0050】
【数2】
【0051】
【数3】
【0052】
この式(3)を展開して、λを消去すると以下の式(4)および式(5)ように書きかえることができる。
【0053】
【数4】
【0054】
【数5】
【0055】
求める未知数(X0,Y0,Z0),(ω,φ,κ)に対して、3点(3個の固定ターゲットマーク42)の実座標(X1,Y1,0),(X2,Y2,0),(X3,Y3,0)、(条件として3点は同一平面上にありとしているためZ座標はいずれも0)と、3点の画像上の座標(x1,y1),(x2,y2),(x3,y3)およびレンズ焦点距離fが既知であるから、これらを連立させて未知数を求める。
【0056】
なお、レンズひずみについての影響を除外するための補正項を共線条件式の中に含めることも考えられるが、多くの場合、短焦点レンズによる撮影ではその影響度合いが大きく、長焦点レンズではその度合いは極めて小さい。
【0057】
本実施の形態では、被写体との位置関係を考慮しつつ、デジタルカメラ90において、長焦点レンズを用いて、撮影することで、レンズひずみの影響を計測精度以下におさえることができる。
【0058】
なお、例えば、個々の固定ターゲットマーク42の中心座標の計測誤差により、座標既知の3点の固定ターゲットマーク42の座標から計算で求めたカメラの撮影位置は不安定となるケースが発生するが、座標既知のターゲットを4点(四番目の固定ターゲットマーク42を第1ターゲット40に設ける)とし、各々が、4点のターゲットの中の任意の3点の組合せで決定される複数の平面に対して、共線条件式から方程式を導き、これを最小二乗法により解くことで、第1ターゲット40および第2ターゲット50が存在する一つの平面を決定することで、誤差配分が最適となる安定したカメラの撮影位置を求めることができる。
【0059】
次に、計測プログラム20は、射影変換機能22により、デジタルカメラ90の撮影位置およびA群のターゲットの位置から、撮影された画像データ30の射影変換を実施し、第1ターゲット40および第2ターゲット50を正面から撮影した画像を作成し、計測ファイル60の正射影画像65に記録する(ステップ244)。
【0060】
すなわち、図7や図8のように斜め方向から撮影された画像データ30を、正面から撮影した図6のような画像データ30に変換する。
また、正射影画像が不要な場合は、固定ターゲットマーク42および対象ターゲットマーク52の画像座標のみ射影変換を実施すれば、画像データ30の全体のピクセル31の射影変換を実施せずとも、次のステップ245で用いる固定ターゲットマーク42および対象ターゲットマーク52の座標(x,y)を提供できる。
【0061】
次に、計測プログラム20は、距離計測機能23により、上述のステップ244で変換した正射影画像よりA群のターゲットおよびBのターゲットの座標(x,y)を求め、それらの座標値を計算してターゲット間の距離ΔLを求める(ステップ245)。
【0062】
この距離ΔLは、たとえば、対象ターゲットマーク52と、直近の一つの固定ターゲットマーク42との距離である。
例えば、60cmの幅を、適切なレンズを装着した横幅3000画素のデジタルカメラ90で撮影した場合、1画素は0.2mmを示すことになる。図9およびステップ242にて説明した通り、1/10画素単位で固定ターゲットマーク42および対象ターゲットマーク52の各々の中心座標を求めることができれば、0.02mmの分解能で距離ΔLを計測することが可能になる。
【0063】
すなわち、一例として600万画素のデジタルカメラ90により撮影された画像データ30は横3000、縦2000ピクセルのデータである。適当なレンズを選定して、30cm×20cmの範囲を撮影した場合、1ピクセルのサイズは0.1mm×0.1mmとなる。
【0064】
固定ターゲットマーク42および対象ターゲットマーク52の各々の画像が、直径で20ピクセル程度のサイズで撮影されていれば、ターゲットマークの中心を重心検出により算出すると、上述の0.1mmの1/5から1/10程度の検出精度で算出することが可能となる。このため、0.02mm程度の位置決定精度を設定することができる。
【0065】
以上が、ステップ240における計測プログラム20による距離計測処理の一例である。
上述の図4のフローチャートに戻って、ステップ240で得られた距離ΔLは、計測プログラム20により計測ファイル60にターゲット間距離64として記録される。
【0066】
また、第1ターゲット40の個々の固定ターゲットマーク42の中心位置は、第1ターゲット位置情報62に記録され、第2ターゲット50の個々の対象ターゲットマーク52の中心位置は、第2ターゲット位置情報63に記録される。
【0067】
そして、ユーザは、構造物70に配置された同じ第1ターゲット40と第2ターゲット50のペアから前後して撮影された複数の画像データ30の各々から得られた距離ΔLを比較することにより、構造物70における亀裂71の拡大等の変位の情報を得ることができる。
【0068】
さらに、本実施の形態の場合、以下のようにして構造物70の変形の判定を計測プログラム20に自動的に行わせることもできる。
すなわち、計測プログラム20は、入力された画像データ30と同じ第1ターゲット40および第2ターゲット50に関する過去の画像データ30の記録を計測ファイル60から検索し、2回目以降の画像データ30である(初回撮影でない)と判定された場合には(ステップ260)、前回に計測されて記録されている距離ΔLと、今回得られた距離ΔLとを比較して両者の差分Eを計算し(ステップ270)、この差分Eが所定の判定閾値E0を超えた場合には(ステップ280)、ユーザに対して距離ΔLの増大、すなわち、構造物70の変形の増大を警告する(ステップ290)。
【0069】
なお、図4のフローチャートでは、同一の第1ターゲット40と第2ターゲット50のペアに対する二回目以降の撮影では、ステップ230から行われることになる。
このように、本実施の形態の計測技術によれば、例えば、構造物70の亀裂71を挟んで配置された第1ターゲット40と第2ターゲット50の画像を1画面内に含む単一の画像データ30を撮影するたけで、構造物70に対する任意の位置で非接触に、第1ターゲット40と第2ターゲット50の距離ΔLを精密に計測できる。
【0070】
この結果、同一の第1ターゲット40および第2ターゲット50の画像データ30を相前後して継続的に撮影することで、構造物70における亀裂71の拡大等の変位を精密に計測および監視できる。
【0071】
また、デジタルカメラ90で構造物70を、所定の期間をおいて段階的に撮影するだけなので、測量機器等の大かがりな設備や、多数の運用人員を必要としない。
すなわち、本実施の形態によれば、大掛かりな設備や人員を必要とすることなく、単一の画像データにて簡易かつ高精度に、土木構造物や建築構造物等の被測定物の測定や継続的な監視を行うことが可能な計測技術を提供することができる。
【0072】
なお、本発明は、上述の実施の形態に例示した構成に限らず、その趣旨を逸脱しない範囲で種々変更可能であることは言うまでもない。
例えば、第1ターゲット40の複数の固定ターゲットマーク42の座標値を自由に設定した仮想平面上で固定ターゲットマーク42および対象ターゲットマーク52の中心位置を決定することもできる。
【0073】
その場合には、距離ΔLは、第1ターゲット40の固定ターゲットマーク42同士の距離に対する比率として計測される。
また、第1ターゲット40や第2ターゲット50を配置する代わりに、構造物70に存在する寸法が既知の構成部材の画像を、第1ターゲット40および第2ターゲット50として用いてもよい。
【0074】
その場合には、第1ターゲット40や第2ターゲット50の配置作業も省略でき、構造物70の変形の計測や監視において、一層の省力化を実現できる利点がある。
【符号の説明】
【0075】
10 情報処理装置
11 マイクロプロセッサ
12 主記憶
13 記憶装置
14 ディスプレイ
15 キーボード
16 外部入出力インタフェース
17 情報伝送路
20 計測プログラム
21 ターゲット中心検出機能
22 射影変換機能
23 距離計測機能
30 画像データ
31 ピクセル
40 第1ターゲット
41 基材
42 固定ターゲットマーク
50 第2ターゲット
51 基材
52 対象ターゲットマーク
60 計測ファイル
61 撮影日時
62 第1ターゲット位置情報
63 第2ターゲット位置情報
64 ターゲット間距離
65 正射影画像
70 構造物
71 亀裂
90 デジタルカメラ
【特許請求の範囲】
【請求項1】
被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像が同一画面内に含まれるように撮影して単一の画像データを得る第1ステップと、
前記画像データから、複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出する第2ステップと、
前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する第3ステップと、
を含むことを特徴とする計測方法。
【請求項2】
請求項1記載の計測方法において、
さらに、異なる時刻で撮影された複数の前記画像データの各々から得られた前記固定ターゲットと前記対象ターゲットとの前記距離の変化を検出して、前記被測定物の変形量を判別する第4ステップを含むことを特徴とする計測方法。
【請求項3】
請求項1記載の計測方法において、
前記第1ターゲットは、4個以上の前記固定ターゲットを含み、
前記第2ステップでは、4個以上の前記固定ターゲットの中の任意の3個の組合せで定まる複数の平面から最小自乗法によって前記測定平面を定めることを特徴とする計測方法。
【請求項4】
請求項1記載の計測方法において、
前記第1ステップでは、前記被測定物に対して任意の方向から撮影して前記画像データを取得し、前記第2ステップでは、前記2次元座標の座標変換によって、前記画像データを、前記被測定物に正対した準正射画像の前記画像データに変換することを特徴とする計測方法。
【請求項5】
請求項1記載の計測方法において、
前記被測定物に配置された前記第1ターゲットおよび前記第2ターゲットをデジタルカメラにて任意の方向から撮影して前記画像データを得ることを特徴とする計測方法。
【請求項6】
請求項1記載の計測方法において、
前記第2ステップでは、前記測定平面における前記2次元座標の座標値を、一つの前記固定ターゲットを基準とした比率で求め、
前記第3ステップでは、前記固定ターゲットと前記対象ターゲットとの前記距離を比率として計測することを特徴とする計測方法。
【請求項7】
請求項1記載の計測方法における前記第1ステップ、前記第2ステップおよび前記第3ステップをコンピュータに実行させることを特徴とする計測プログラム。
【請求項8】
被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像を同一画面内に含む画像データを入力する入力手段と、
単一の前記画像データから複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出し、前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する演算手段と、
を含むことを特徴とする計測装置。
【請求項9】
請求項8記載の計測装置において、
前記演算手段は、異なる時刻で撮影された複数の前記画像データの各々から得られた前記固定ターゲットと前記対象ターゲットとの前記距離の変化を検出して、前記被測定物の変形量を判別することを特徴とする計測装置。
【請求項10】
請求項8記載の計測装置において、
前記第1ターゲットは、4個以上の前記固定ターゲットを含み、前記演算手段は、4個以上の前記固定ターゲットの中の任意の3個の組合せで定まる複数の平面から最小自乗法によって前記測定平面を定めることを特徴とする計測装置。
【請求項11】
請求項8記載の計測装置において、
前記演算手段は、前記被測定物に対して任意の方向から撮影された前記画像データを、前記2次元座標の座標変換によって、前記被測定物に正対した準正射画像に変換することを特徴とする計測装置。
【請求項12】
請求項8記載の計測装置において、
入力手段は、デジタルカメラが接続され、前記デジタルカメラから前記画像データを入力する入出力インタフェースであることを特徴とする計測装置。
【請求項13】
請求項8記載の計測装置において、
前記演算手段は、前記測定平面における前記2次元座標の座標値を、一つの前記固定ターゲットを基準とした比率で求め、前記固定ターゲットと前記対象ターゲットとの前記距離を比率として計測することを特徴とする計測装置。
【請求項1】
被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像が同一画面内に含まれるように撮影して単一の画像データを得る第1ステップと、
前記画像データから、複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出する第2ステップと、
前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する第3ステップと、
を含むことを特徴とする計測方法。
【請求項2】
請求項1記載の計測方法において、
さらに、異なる時刻で撮影された複数の前記画像データの各々から得られた前記固定ターゲットと前記対象ターゲットとの前記距離の変化を検出して、前記被測定物の変形量を判別する第4ステップを含むことを特徴とする計測方法。
【請求項3】
請求項1記載の計測方法において、
前記第1ターゲットは、4個以上の前記固定ターゲットを含み、
前記第2ステップでは、4個以上の前記固定ターゲットの中の任意の3個の組合せで定まる複数の平面から最小自乗法によって前記測定平面を定めることを特徴とする計測方法。
【請求項4】
請求項1記載の計測方法において、
前記第1ステップでは、前記被測定物に対して任意の方向から撮影して前記画像データを取得し、前記第2ステップでは、前記2次元座標の座標変換によって、前記画像データを、前記被測定物に正対した準正射画像の前記画像データに変換することを特徴とする計測方法。
【請求項5】
請求項1記載の計測方法において、
前記被測定物に配置された前記第1ターゲットおよび前記第2ターゲットをデジタルカメラにて任意の方向から撮影して前記画像データを得ることを特徴とする計測方法。
【請求項6】
請求項1記載の計測方法において、
前記第2ステップでは、前記測定平面における前記2次元座標の座標値を、一つの前記固定ターゲットを基準とした比率で求め、
前記第3ステップでは、前記固定ターゲットと前記対象ターゲットとの前記距離を比率として計測することを特徴とする計測方法。
【請求項7】
請求項1記載の計測方法における前記第1ステップ、前記第2ステップおよび前記第3ステップをコンピュータに実行させることを特徴とする計測プログラム。
【請求項8】
被測定物に配置された、2次元の位置関係が既知または2次元の位置関係が任意の尺度で設定された少なくとも3個の固定ターゲットを含む第1ターゲット、および前記第1ターゲットに対して任意の位置に配置された少なくとも一つの対象ターゲットを含む第2ターゲットの画像を同一画面内に含む画像データを入力する入力手段と、
単一の前記画像データから複数の前記固定ターゲットによって定まる測定平面内における当該固定ターゲットおよび前記対象ターゲットの2次元座標を検出し、前記2次元座標に基づいて、前記固定ターゲットと前記対象ターゲットとの距離を算出する演算手段と、
を含むことを特徴とする計測装置。
【請求項9】
請求項8記載の計測装置において、
前記演算手段は、異なる時刻で撮影された複数の前記画像データの各々から得られた前記固定ターゲットと前記対象ターゲットとの前記距離の変化を検出して、前記被測定物の変形量を判別することを特徴とする計測装置。
【請求項10】
請求項8記載の計測装置において、
前記第1ターゲットは、4個以上の前記固定ターゲットを含み、前記演算手段は、4個以上の前記固定ターゲットの中の任意の3個の組合せで定まる複数の平面から最小自乗法によって前記測定平面を定めることを特徴とする計測装置。
【請求項11】
請求項8記載の計測装置において、
前記演算手段は、前記被測定物に対して任意の方向から撮影された前記画像データを、前記2次元座標の座標変換によって、前記被測定物に正対した準正射画像に変換することを特徴とする計測装置。
【請求項12】
請求項8記載の計測装置において、
入力手段は、デジタルカメラが接続され、前記デジタルカメラから前記画像データを入力する入出力インタフェースであることを特徴とする計測装置。
【請求項13】
請求項8記載の計測装置において、
前記演算手段は、前記測定平面における前記2次元座標の座標値を、一つの前記固定ターゲットを基準とした比率で求め、前記固定ターゲットと前記対象ターゲットとの前記距離を比率として計測することを特徴とする計測装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図9】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図9】
【図11】
【公開番号】特開2011−123008(P2011−123008A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−282841(P2009−282841)
【出願日】平成21年12月14日(2009.12.14)
【出願人】(597165618)株式会社ネクスコ東日本エンジニアリング (18)
【出願人】(501161343)つくばソフトウェアエンジニアリング株式会社 (1)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月14日(2009.12.14)
【出願人】(597165618)株式会社ネクスコ東日本エンジニアリング (18)
【出願人】(501161343)つくばソフトウェアエンジニアリング株式会社 (1)
【Fターム(参考)】
[ Back to top ]