
計測方法
【課題】被計測面の表面形状の計測において、部分領域の計測データのつなぎ合わせ(スティッチ)に要する計算負荷の低減に有利な技術を提供する。
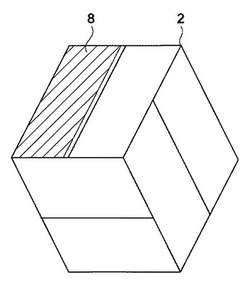
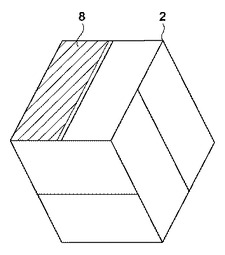
【解決手段】正六角形の外形を有する被計測面2の表面形状を計測する計測方法であって、前記被計測面2に対して、前記被計測面2の全体を覆うように、平行四辺形の同一の外形を有する複数の部分領域8を設定する第1ステップと、前記複数の部分領域8のそれぞれの表面形状を計測装置で計測し、前記複数の部分領域8のそれぞれについて計測データを取得する第2ステップと、前記複数の部分領域8のそれぞれの前記計測データをつなぎ合わせて前記被計測面2の表面形状を算出する第3ステップと、を有し、前記平行四辺形は、120度と60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下。
【解決手段】正六角形の外形を有する被計測面2の表面形状を計測する計測方法であって、前記被計測面2に対して、前記被計測面2の全体を覆うように、平行四辺形の同一の外形を有する複数の部分領域8を設定する第1ステップと、前記複数の部分領域8のそれぞれの表面形状を計測装置で計測し、前記複数の部分領域8のそれぞれについて計測データを取得する第2ステップと、前記複数の部分領域8のそれぞれの前記計測データをつなぎ合わせて前記被計測面2の表面形状を算出する第3ステップと、を有し、前記平行四辺形は、120度と60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被計測面の表面形状を計測する計測方法に関する。
【背景技術】
【0002】
近年、宇宙の成り立ちや太陽系外の惑星の探査などの深宇宙探索を目的として、主鏡の直径が30m以上となる地上望遠鏡の開発が進んでいる。直径30m以上の主鏡を一度に製作することは困難であるため、主鏡は、通常、複数のミラー(セグメントミラー)を組み合わせることで構成される。TMT(Thirty Meter Telescope)やEELT(European Extremely Large Telescope)などの大型天体望遠鏡の主鏡は、内接円の直径が1mを超す六角形のセグメントミラーで構成されている。但し、セグメントミラーの内接円の直径が1m程度だとしても、セグメントミラーの全面を一度に計測することは、装置の大型化に伴うコストの増加と計測精度の低下を招くため、現実的ではない。
【0003】
そこで、被計測面を複数の部分領域に分割してその表面形状を計測し、各部分領域の計測データをつなぎ合わせる(スティッチする)ことで、被計測面の表面形状を求めるスティッチ法が知られている(特許文献1参照)。特許文献1では、部分領域(の表面形状)を計測する際に干渉計が使用されており、計測データは常に参照面との比較となるため、スティッチの精度が優れているという利点がある。
【0004】
また、スティッチ法においては、部分領域を計測する際に3次元計測装置を使用する技術も提案されている(特許文献2参照)。特許文献2では、部分領域のそれぞれの計測データの全面を使うことで参照形状を最適化し、部分領域間のオーバーラップ領域を使わずにスティッチを実現している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6956657号明細書
【特許文献2】特開2009−294134号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
スティッチ法において、部分領域(の表面形状)を空間周波数ごとに評価する場合、一般的に、直交関数としてZernike関数が用いられている。Zernike関数は、円形の領域を空間周波数ごとに評価する際に非常に有用である。しかしながら、部分領域として円形の領域を設定する場合、被計測面の外周部分では、部分領域が被計測面の外側にはみだしてしまうため、部分領域が円形の領域とはならない。また、六角形のセグメントミラーに対して部分領域を設定する場合も同様に、セグメントミラーの外周部分では、部分領域が円形の領域とはならない。このような場合には、直交関数としてZernike関数を各部分領域に適用することができない。
【0007】
特許文献1では、オーバーラップ領域で計測データをピクセルごとに最適化することで各部分領域の計測データをスティッチし、スティッチ後の円形の被計測面に対してZernike関数を適用している。また、特許文献2には、部分領域の計測データを用いてシステムエラーをどのように決定するのかが具体的に開示されていない。特許文献1や特許文献2において、計測データの全てのピクセルをスティッチ計算に用いる場合、その計算負荷は多大なものとなってしまう。例えば、撮像素子の全体のピクセルが1000×1000であり、オーバーラップ領域が全体の5%であると仮定すると、1つの部分領域の計測データでスティッチ計算に用いるべきピクセルの数は5000となる。オーバーラップ領域を形成する計測データの数は最小で2つであるため、最低でも10000ものピクセルをスティッチ計算で扱う必要があり、その計算負荷は少なくない。
【0008】
本発明は、このような従来技術の課題に鑑みてなされ、被計測面の表面形状の計測において、部分領域の計測データのつなぎ合わせ(スティッチ)に要する計算負荷の低減に有利な技術を提供することを例示的目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明の一側面としての計測方法は、正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、前記被計測面に対して、前記被計測面の全体を覆うように、平行四辺形の同一の外形を有する複数の部分領域を設定する第1ステップと、前記複数の部分領域のそれぞれの表面形状を計測装置で計測し、前記複数の部分領域のそれぞれについて計測データを取得する第2ステップと、前記複数の部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、を有し、前記平行四辺形は、120度と60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下であることを特徴とする。
【0010】
本発明の更なる目的又はその他の側面は、以下、添付図面を参照して説明される好ましい実施形態によって明らかにされるであろう。
【発明の効果】
【0011】
本発明によれば、例えば、被計測面の表面形状の計測において、部分領域の計測データのつなぎ合わせ(スティッチ)に要する計算負荷の低減に有利な技術を提供することができる。
【図面の簡単な説明】
【0012】
【図1】計測装置の構成を示す図である。
【図2】本発明の一側面としての計測方法を説明するためのフローチャートである。
【図3】被計測面に対して設定される複数の部分領域の一例を説明するための図である。
【図4】図2に示すS206(被計測面の形状の算出)の処理を詳細に説明するためのフローチャートである。
【図5】被計測面に対して設定される複数の部分領域の一例を説明するための図である。
【図6】被計測面に対して設定される複数の部分領域の一例を説明するための図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本発明の好適な実施の形態について説明する。なお、各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
【0014】
本発明の一側面としての計測方法は、正六角形の外形を有する被計測面の表面形状を計測する方法であって、例えば、大型天体望遠鏡の主鏡を構成するセグメントミラー、即ち、内接円の直径が1mを超す六角形の外形を有するミラーの表面形状の計測に好適である。
【0015】
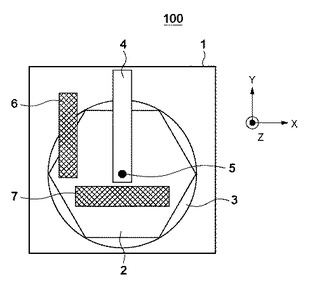
図1は、本実施形態の計測方法で用いられる計測装置100の構成を示す図である。計測装置100は、正六角形の外形を有する被計測面2を計測するための3次元計測装置である。定盤1は、例えば、3つの振動減衰器(不図示)に接続されており、床からの振動が被計測面2の計測に影響を及ぼすことを防止する。被計測面2は、定盤1の上に載置された回転ステージ3に保持されている。また、X軸方向、Y軸方向及びZ軸方向に変位可能な計測アーム4には、被計測面2の表面形状を計測するための接触式又は非接触式のプローブ5が設けられている。従って、回転ステージ3を回転させて計測アーム4をX軸方向、Y軸方向及びZ軸方向に変位させることで、後述するように、被計測面2に対して設定された複数の部分領域のそれぞれ(の表面形状)を計測することが可能となる。ここで、計測装置100における計測データ(即ち、各部分領域の計測データ)は、プローブ5の3次元の座標データ(3次元の位置座標)として得られる。なお、プローブ5の3次元の位置座標に関しては、X座標はX軸基準ミラー6を基準として得られ、Y座標はY軸基準ミラー7を基準として得られ、Z座標はZ軸基準ミラー(不図示)を基準として得られる。
【0016】
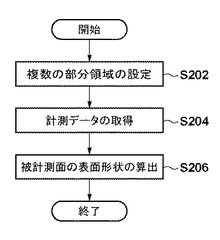
図2を参照して、本発明の一側面としての計測方法の全体的な処理を説明する。S202(第1ステップ)では、被計測面2に対して、被計測面2の全体を覆うように、複数の部分領域を設定する。本実施形態では、図3に示すように、被計測面2に対して、平行四辺形の同一の外形を有する6つの部分領域8を設定する。平行四辺形の部分領域8のそれぞれは、120度と60度の内角を有し、一辺の最大の長さが正六角形の被計測面2の一辺の長さ以下で設定される。平行四辺形の部分領域8は、6つに限定されるものではなく、任意の数の部分領域8を設定してよい。また、平行四辺形は、正方形やひし形なども含む。本実施形態では、6つの部分領域8のそれぞれは、隣り合う部分領域が接するように設定しているが、隣り合う部分領域が重なり合うように設定してもよい。但し、部分領域8のそれぞれは、その計測データが必ず正六角形の被計測面2の内部情報(表面形状に関する情報)を反映し、且つ、NaN(Not a Number)データをできるだけ含まないように設定される。これは、NaNデータが存在すると、後述するように、部分領域8のそれぞれの形状を計測装置100で計測したときの計測誤差(システムエラー)を定義する直交関数系の基底の係数計算の精度を劣化させてしまうからである。
【0017】
S204(第2ステップ)では、S202で設定した部分領域8のそれぞれを計測装置100で計測し、部分領域8のそれぞれについて計測データを取得する。但し、S204で取得される計測データには、一般に、計測装置100に起因する計測誤差(システムエラー)を含んでいる。また、かかるシステムエラーは、計測装置100に固有な誤差や部分領域8のそれぞれの表面形状を計測する際の計測装置100と部分領域8との相対的な位置及び姿勢の誤差などのシステムエラーを含む。
【0018】
S206(第3ステップ)では、S204で取得した部分領域8のそれぞれの計測データをつなぎ合わせて(スティッチして)被計測面2の表面形状を算出する。
【0019】
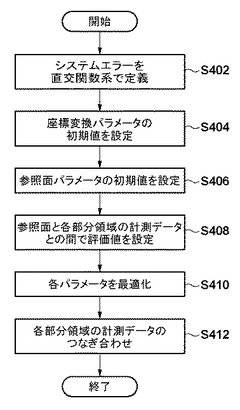
図4を参照して、被計測面2の形状の算出(S206)の処理について具体的に説明する。S402では、S202で設定した平行四辺形の部分領域8のそれぞれについて、各部分領域8の形状を計測装置100で計測したときのシステムエラーを直交関数系で定義する。換言すれば、システムエラーパラメータ(a1、a2、・・・、an)の初期値を設定する。本実施形態では、平行四辺形の部分領域8に対して、直交関数系の各基底P1、P2、・・・、Pnが、グラム・シュミット(Gram−Schmidt)の直交化法を用いて決定される。この場合、部分領域8のそれぞれのシステムエラーPは、以下の式(1)で表される。
【0020】
P=a1P1+a2P2+・・・+anPn ・・・(1)
【0021】
ここで、a1、a2、・・・、anは、各基底P1、P2、・・・、Pnの係数(変数)を表す。本実施形態では、全ての部分領域8の外形形状は同一の平行四辺形であるため、全ての計測データを用いてシステムエラーを計算する際に、同一の直交関数系の基底を利用することができる。このように、計測データのピクセル(ピクセルデータ)を用いるのではなく、各基底の係数を用いることで、システムエラーの計算に必要なパラメータの数を著しく減らすことができ、計算負荷を低減することができる。なお、a1、a2、・・・、anには、最初に初期値として適当な値が設定されるが、最適化を行う際に変化する。
【0022】
S404では、各部分領域8のそれぞれに対して、座標変換パラメータ(X1、2、・・・、6、Y1、2、・・・6、Z1、2、・・・6、θX1、2、・・・6、θY1、2、・・・6、θZ1、2、・・・6)の初期値を設定する。ここで、座標変換パラメータとは、各部分領域8の計測データをスティッチして被計測面2の表面形状を算出(合成)する際における各部分領域8の計測データの空間座標である。6つの平行四辺形の部分領域8を設定した場合、各部分領域8の計測データは、6つの自由度(X偏心、Y偏心、Z偏心、X軸回りの回転、Y軸回りの回転、Z軸回りの回転)を有する。従って、本実施形態では、36個の座標変換パラメータをスティッチに用いる。なお、座標変換パラメータには、最初に初期値として適当な値が設定されるが、最適化を行う際に変化する。
【0023】
S406では、参照面パラメータの初期値を設定する。ここで、参照面とは、各部分領域8の計測データをスティッチする際に用いられる直交関数又はピクセルで表現される仮想的な面である。参照面の大きさ(形状)は、被計測面2の大きさと一致しているとよいが、被計測面2の大きさより大きくてもよい。但し、参照面の大きさが被計測面2の大きさよりも小さい場合には、各部分領域8の計測データの全てを用いることができないため、スティッチの精度が低下することになる。
【0024】
S408では、参照面と各部分領域8の計測データとの間で評価値(目的関数)を設定する。例えば、各部分領域8のシステムエラーをP、各部分領域8の計測データをD、参照面をRとすると、評価値Qは、以下の式(2)に示すように表現することができる。
【0025】
Q=R−Σ6(D−P) ・・・(2)
【0026】
式(2)において、D及びPの外形形状は平行四辺形であるため、それぞれの直交関数系の基底は一致している。Σは、6つの同一形状の平行四辺形を用いて六角形を形成することを示している。一方、Rの外形形状は六角形であるため、D及びPの別の直交関数系(即ち、D及びPの直交関数系とは異なる直交関数系)の基底を有している。互いに異なる直交関数系を比較する場合には、計測データを一旦ピクセルに変換し、ピクセルごとに差分を求めてもよい。また、平行四辺形の直交関数系と六角形の直交関数系との対応関係を計算し、かかる対応関係に基づいて平行四辺形の直交関数系の基底の係数を六角形の直交関数系の基底の係数に変換して係数の差分を求めてもよい。同様に、かかる対応関係に基づいて六角形の直交関数系の基底の係数を平行四辺形の直交関数系の基底の係数に変換して係数の差分を求めてもよい。いずれにしても、ピクセルごとに差分を求めるよりも、直交関数系の基底の係数ごとに差分を求める方が計算負荷を低減することができる。評価値Qは、上述したように、ピクセルごとの差分、或いは、直交関数系の基底の係数ごとの差分を、例えば、二乗和したものとなる。
【0027】
S410では、S408で設定した評価値(目的関数)が許容範囲に収まるように、本実施形態では、評価値が最小となるように、各パラメータ(変数)を最適化する。最適化の方法としては、例えば、最小二乗法などを用いればよい。評価値が最小となる各パラメータの値を求めることで、システムエラーパラメータ、座標変換パラメータ及び参照面パラメータが決定される。
【0028】
S412では、S410で最適化(決定)されたシステムエラーパラメータ及び座標変換パラメータを用いて、各部分領域8の計測データをつなぎ合わせる(合成する)。具体的には、まず、S104で取得された各部分領域8の計測データから、S410で最適化されたシステムエラーパラメータに対応するシステムエラーを除去する。そして、システムエラーが除去された各部分領域8の計測データを、S410で最適化された座標変換パラメータに対応する空間座標にあてはめる。これにより、被計測面2の表面形状が算出される。
【0029】
本実施形態の計測方法によれば、スティッチに必要な計算負荷を低減することができる。例えば、プローブ5を構成する(即ち、表面形状を計測するための)撮像素子の全体のピクセルが1000×1000であり、オーバーラップ領域が全体の5%であると仮定する。この場合、上述したように、最低でも10000ものピクセルをスティッチ計算で扱う必要がある。一方、本実施形態では、ピクセルの代わりに直交関数系の基底の係数を用いているため、その数は最大でも200程度でよい。これは、システムエラーは、基本的には、空間周波数の低い基底で表され、高い空間周波数を計算に用いる必要がないからである。
【0030】
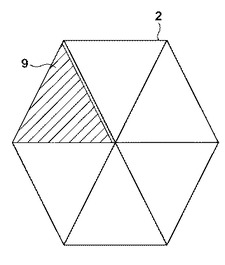
また、S202では、図5に示すように、被計測面2に対して、三角形の同一の形状を有する6つの部分領域9を設定してもよい。三角形の部分領域9のそれぞれは、60度の内角を有し、一辺の最大の長さが正六角形の被計測面2の一辺の長さ以下で設定される。三角形の部分領域9は、6つに限定されるものではなく、任意の数の部分領域9を設定してよい。図5では、6つの部分領域9のそれぞれは、隣り合う部分領域が接するように設定しているが、隣り合う部分領域が重なり合うように設定してもよい。但し、部分領域9のそれぞれは、その計測データが必ず正六角形の被計測面2の内部情報(表面形状に関する情報)を反映し、且つ、NaN(Not a Number)データをできるだけ含まないように設定される。
【0031】
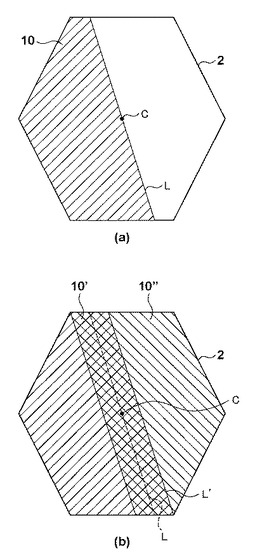
また、S202では、図6(a)に示すように、被計測面2に対して、被計測面2の中心Cを通る直線Lで点対称に2分割された部分領域10を設定してもよい。更に、隣り合う部分領域が接するように設定する場合を設定する場合には、図6(b)に示すように、被計測面2に対して、部分領域10’と、部分領域10’’とを設定してもよい。ここで、部分領域10’は、被計測面2の中心Cを通る直線Lを平行移動させた直線L’で定義される領域であり、部分領域10’’は、中心Cを軸として部分領域10’を180度回転させた領域である。
【0032】
また、計測装置100の計測領域の外形形状は、S202で設定される部分領域の外形形状と必ずしも一致するものではない。一般的には、計測領域の大きさは部分領域の大きさよりも大きい(即ち、部分領域の大きさを計測領域の大きさよりも小さく設定する)ことが多い。このような場合には、被計測面2に対して設定された複数の部分領域のそれぞれを計測装置100の計測領域に位置決めして計測領域を計測装置100で計測し、複数の部分領域のそれぞれについて、その表面形状を含む計測データを取得すればよい。
【0033】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されないことはいうまでもなく、その要旨の範囲内で種々の変形及び変更が可能である。例えば、本実施形態では、被計測面に対して設定された各部分領域(の形状)を計測する計測装置として3次元計測装置を用いているが、干渉計を用いてもよい。
【技術分野】
【0001】
本発明は、被計測面の表面形状を計測する計測方法に関する。
【背景技術】
【0002】
近年、宇宙の成り立ちや太陽系外の惑星の探査などの深宇宙探索を目的として、主鏡の直径が30m以上となる地上望遠鏡の開発が進んでいる。直径30m以上の主鏡を一度に製作することは困難であるため、主鏡は、通常、複数のミラー(セグメントミラー)を組み合わせることで構成される。TMT(Thirty Meter Telescope)やEELT(European Extremely Large Telescope)などの大型天体望遠鏡の主鏡は、内接円の直径が1mを超す六角形のセグメントミラーで構成されている。但し、セグメントミラーの内接円の直径が1m程度だとしても、セグメントミラーの全面を一度に計測することは、装置の大型化に伴うコストの増加と計測精度の低下を招くため、現実的ではない。
【0003】
そこで、被計測面を複数の部分領域に分割してその表面形状を計測し、各部分領域の計測データをつなぎ合わせる(スティッチする)ことで、被計測面の表面形状を求めるスティッチ法が知られている(特許文献1参照)。特許文献1では、部分領域(の表面形状)を計測する際に干渉計が使用されており、計測データは常に参照面との比較となるため、スティッチの精度が優れているという利点がある。
【0004】
また、スティッチ法においては、部分領域を計測する際に3次元計測装置を使用する技術も提案されている(特許文献2参照)。特許文献2では、部分領域のそれぞれの計測データの全面を使うことで参照形状を最適化し、部分領域間のオーバーラップ領域を使わずにスティッチを実現している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6956657号明細書
【特許文献2】特開2009−294134号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
スティッチ法において、部分領域(の表面形状)を空間周波数ごとに評価する場合、一般的に、直交関数としてZernike関数が用いられている。Zernike関数は、円形の領域を空間周波数ごとに評価する際に非常に有用である。しかしながら、部分領域として円形の領域を設定する場合、被計測面の外周部分では、部分領域が被計測面の外側にはみだしてしまうため、部分領域が円形の領域とはならない。また、六角形のセグメントミラーに対して部分領域を設定する場合も同様に、セグメントミラーの外周部分では、部分領域が円形の領域とはならない。このような場合には、直交関数としてZernike関数を各部分領域に適用することができない。
【0007】
特許文献1では、オーバーラップ領域で計測データをピクセルごとに最適化することで各部分領域の計測データをスティッチし、スティッチ後の円形の被計測面に対してZernike関数を適用している。また、特許文献2には、部分領域の計測データを用いてシステムエラーをどのように決定するのかが具体的に開示されていない。特許文献1や特許文献2において、計測データの全てのピクセルをスティッチ計算に用いる場合、その計算負荷は多大なものとなってしまう。例えば、撮像素子の全体のピクセルが1000×1000であり、オーバーラップ領域が全体の5%であると仮定すると、1つの部分領域の計測データでスティッチ計算に用いるべきピクセルの数は5000となる。オーバーラップ領域を形成する計測データの数は最小で2つであるため、最低でも10000ものピクセルをスティッチ計算で扱う必要があり、その計算負荷は少なくない。
【0008】
本発明は、このような従来技術の課題に鑑みてなされ、被計測面の表面形状の計測において、部分領域の計測データのつなぎ合わせ(スティッチ)に要する計算負荷の低減に有利な技術を提供することを例示的目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明の一側面としての計測方法は、正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、前記被計測面に対して、前記被計測面の全体を覆うように、平行四辺形の同一の外形を有する複数の部分領域を設定する第1ステップと、前記複数の部分領域のそれぞれの表面形状を計測装置で計測し、前記複数の部分領域のそれぞれについて計測データを取得する第2ステップと、前記複数の部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、を有し、前記平行四辺形は、120度と60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下であることを特徴とする。
【0010】
本発明の更なる目的又はその他の側面は、以下、添付図面を参照して説明される好ましい実施形態によって明らかにされるであろう。
【発明の効果】
【0011】
本発明によれば、例えば、被計測面の表面形状の計測において、部分領域の計測データのつなぎ合わせ(スティッチ)に要する計算負荷の低減に有利な技術を提供することができる。
【図面の簡単な説明】
【0012】
【図1】計測装置の構成を示す図である。
【図2】本発明の一側面としての計測方法を説明するためのフローチャートである。
【図3】被計測面に対して設定される複数の部分領域の一例を説明するための図である。
【図4】図2に示すS206(被計測面の形状の算出)の処理を詳細に説明するためのフローチャートである。
【図5】被計測面に対して設定される複数の部分領域の一例を説明するための図である。
【図6】被計測面に対して設定される複数の部分領域の一例を説明するための図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本発明の好適な実施の形態について説明する。なお、各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
【0014】
本発明の一側面としての計測方法は、正六角形の外形を有する被計測面の表面形状を計測する方法であって、例えば、大型天体望遠鏡の主鏡を構成するセグメントミラー、即ち、内接円の直径が1mを超す六角形の外形を有するミラーの表面形状の計測に好適である。
【0015】
図1は、本実施形態の計測方法で用いられる計測装置100の構成を示す図である。計測装置100は、正六角形の外形を有する被計測面2を計測するための3次元計測装置である。定盤1は、例えば、3つの振動減衰器(不図示)に接続されており、床からの振動が被計測面2の計測に影響を及ぼすことを防止する。被計測面2は、定盤1の上に載置された回転ステージ3に保持されている。また、X軸方向、Y軸方向及びZ軸方向に変位可能な計測アーム4には、被計測面2の表面形状を計測するための接触式又は非接触式のプローブ5が設けられている。従って、回転ステージ3を回転させて計測アーム4をX軸方向、Y軸方向及びZ軸方向に変位させることで、後述するように、被計測面2に対して設定された複数の部分領域のそれぞれ(の表面形状)を計測することが可能となる。ここで、計測装置100における計測データ(即ち、各部分領域の計測データ)は、プローブ5の3次元の座標データ(3次元の位置座標)として得られる。なお、プローブ5の3次元の位置座標に関しては、X座標はX軸基準ミラー6を基準として得られ、Y座標はY軸基準ミラー7を基準として得られ、Z座標はZ軸基準ミラー(不図示)を基準として得られる。
【0016】
図2を参照して、本発明の一側面としての計測方法の全体的な処理を説明する。S202(第1ステップ)では、被計測面2に対して、被計測面2の全体を覆うように、複数の部分領域を設定する。本実施形態では、図3に示すように、被計測面2に対して、平行四辺形の同一の外形を有する6つの部分領域8を設定する。平行四辺形の部分領域8のそれぞれは、120度と60度の内角を有し、一辺の最大の長さが正六角形の被計測面2の一辺の長さ以下で設定される。平行四辺形の部分領域8は、6つに限定されるものではなく、任意の数の部分領域8を設定してよい。また、平行四辺形は、正方形やひし形なども含む。本実施形態では、6つの部分領域8のそれぞれは、隣り合う部分領域が接するように設定しているが、隣り合う部分領域が重なり合うように設定してもよい。但し、部分領域8のそれぞれは、その計測データが必ず正六角形の被計測面2の内部情報(表面形状に関する情報)を反映し、且つ、NaN(Not a Number)データをできるだけ含まないように設定される。これは、NaNデータが存在すると、後述するように、部分領域8のそれぞれの形状を計測装置100で計測したときの計測誤差(システムエラー)を定義する直交関数系の基底の係数計算の精度を劣化させてしまうからである。
【0017】
S204(第2ステップ)では、S202で設定した部分領域8のそれぞれを計測装置100で計測し、部分領域8のそれぞれについて計測データを取得する。但し、S204で取得される計測データには、一般に、計測装置100に起因する計測誤差(システムエラー)を含んでいる。また、かかるシステムエラーは、計測装置100に固有な誤差や部分領域8のそれぞれの表面形状を計測する際の計測装置100と部分領域8との相対的な位置及び姿勢の誤差などのシステムエラーを含む。
【0018】
S206(第3ステップ)では、S204で取得した部分領域8のそれぞれの計測データをつなぎ合わせて(スティッチして)被計測面2の表面形状を算出する。
【0019】
図4を参照して、被計測面2の形状の算出(S206)の処理について具体的に説明する。S402では、S202で設定した平行四辺形の部分領域8のそれぞれについて、各部分領域8の形状を計測装置100で計測したときのシステムエラーを直交関数系で定義する。換言すれば、システムエラーパラメータ(a1、a2、・・・、an)の初期値を設定する。本実施形態では、平行四辺形の部分領域8に対して、直交関数系の各基底P1、P2、・・・、Pnが、グラム・シュミット(Gram−Schmidt)の直交化法を用いて決定される。この場合、部分領域8のそれぞれのシステムエラーPは、以下の式(1)で表される。
【0020】
P=a1P1+a2P2+・・・+anPn ・・・(1)
【0021】
ここで、a1、a2、・・・、anは、各基底P1、P2、・・・、Pnの係数(変数)を表す。本実施形態では、全ての部分領域8の外形形状は同一の平行四辺形であるため、全ての計測データを用いてシステムエラーを計算する際に、同一の直交関数系の基底を利用することができる。このように、計測データのピクセル(ピクセルデータ)を用いるのではなく、各基底の係数を用いることで、システムエラーの計算に必要なパラメータの数を著しく減らすことができ、計算負荷を低減することができる。なお、a1、a2、・・・、anには、最初に初期値として適当な値が設定されるが、最適化を行う際に変化する。
【0022】
S404では、各部分領域8のそれぞれに対して、座標変換パラメータ(X1、2、・・・、6、Y1、2、・・・6、Z1、2、・・・6、θX1、2、・・・6、θY1、2、・・・6、θZ1、2、・・・6)の初期値を設定する。ここで、座標変換パラメータとは、各部分領域8の計測データをスティッチして被計測面2の表面形状を算出(合成)する際における各部分領域8の計測データの空間座標である。6つの平行四辺形の部分領域8を設定した場合、各部分領域8の計測データは、6つの自由度(X偏心、Y偏心、Z偏心、X軸回りの回転、Y軸回りの回転、Z軸回りの回転)を有する。従って、本実施形態では、36個の座標変換パラメータをスティッチに用いる。なお、座標変換パラメータには、最初に初期値として適当な値が設定されるが、最適化を行う際に変化する。
【0023】
S406では、参照面パラメータの初期値を設定する。ここで、参照面とは、各部分領域8の計測データをスティッチする際に用いられる直交関数又はピクセルで表現される仮想的な面である。参照面の大きさ(形状)は、被計測面2の大きさと一致しているとよいが、被計測面2の大きさより大きくてもよい。但し、参照面の大きさが被計測面2の大きさよりも小さい場合には、各部分領域8の計測データの全てを用いることができないため、スティッチの精度が低下することになる。
【0024】
S408では、参照面と各部分領域8の計測データとの間で評価値(目的関数)を設定する。例えば、各部分領域8のシステムエラーをP、各部分領域8の計測データをD、参照面をRとすると、評価値Qは、以下の式(2)に示すように表現することができる。
【0025】
Q=R−Σ6(D−P) ・・・(2)
【0026】
式(2)において、D及びPの外形形状は平行四辺形であるため、それぞれの直交関数系の基底は一致している。Σは、6つの同一形状の平行四辺形を用いて六角形を形成することを示している。一方、Rの外形形状は六角形であるため、D及びPの別の直交関数系(即ち、D及びPの直交関数系とは異なる直交関数系)の基底を有している。互いに異なる直交関数系を比較する場合には、計測データを一旦ピクセルに変換し、ピクセルごとに差分を求めてもよい。また、平行四辺形の直交関数系と六角形の直交関数系との対応関係を計算し、かかる対応関係に基づいて平行四辺形の直交関数系の基底の係数を六角形の直交関数系の基底の係数に変換して係数の差分を求めてもよい。同様に、かかる対応関係に基づいて六角形の直交関数系の基底の係数を平行四辺形の直交関数系の基底の係数に変換して係数の差分を求めてもよい。いずれにしても、ピクセルごとに差分を求めるよりも、直交関数系の基底の係数ごとに差分を求める方が計算負荷を低減することができる。評価値Qは、上述したように、ピクセルごとの差分、或いは、直交関数系の基底の係数ごとの差分を、例えば、二乗和したものとなる。
【0027】
S410では、S408で設定した評価値(目的関数)が許容範囲に収まるように、本実施形態では、評価値が最小となるように、各パラメータ(変数)を最適化する。最適化の方法としては、例えば、最小二乗法などを用いればよい。評価値が最小となる各パラメータの値を求めることで、システムエラーパラメータ、座標変換パラメータ及び参照面パラメータが決定される。
【0028】
S412では、S410で最適化(決定)されたシステムエラーパラメータ及び座標変換パラメータを用いて、各部分領域8の計測データをつなぎ合わせる(合成する)。具体的には、まず、S104で取得された各部分領域8の計測データから、S410で最適化されたシステムエラーパラメータに対応するシステムエラーを除去する。そして、システムエラーが除去された各部分領域8の計測データを、S410で最適化された座標変換パラメータに対応する空間座標にあてはめる。これにより、被計測面2の表面形状が算出される。
【0029】
本実施形態の計測方法によれば、スティッチに必要な計算負荷を低減することができる。例えば、プローブ5を構成する(即ち、表面形状を計測するための)撮像素子の全体のピクセルが1000×1000であり、オーバーラップ領域が全体の5%であると仮定する。この場合、上述したように、最低でも10000ものピクセルをスティッチ計算で扱う必要がある。一方、本実施形態では、ピクセルの代わりに直交関数系の基底の係数を用いているため、その数は最大でも200程度でよい。これは、システムエラーは、基本的には、空間周波数の低い基底で表され、高い空間周波数を計算に用いる必要がないからである。
【0030】
また、S202では、図5に示すように、被計測面2に対して、三角形の同一の形状を有する6つの部分領域9を設定してもよい。三角形の部分領域9のそれぞれは、60度の内角を有し、一辺の最大の長さが正六角形の被計測面2の一辺の長さ以下で設定される。三角形の部分領域9は、6つに限定されるものではなく、任意の数の部分領域9を設定してよい。図5では、6つの部分領域9のそれぞれは、隣り合う部分領域が接するように設定しているが、隣り合う部分領域が重なり合うように設定してもよい。但し、部分領域9のそれぞれは、その計測データが必ず正六角形の被計測面2の内部情報(表面形状に関する情報)を反映し、且つ、NaN(Not a Number)データをできるだけ含まないように設定される。
【0031】
また、S202では、図6(a)に示すように、被計測面2に対して、被計測面2の中心Cを通る直線Lで点対称に2分割された部分領域10を設定してもよい。更に、隣り合う部分領域が接するように設定する場合を設定する場合には、図6(b)に示すように、被計測面2に対して、部分領域10’と、部分領域10’’とを設定してもよい。ここで、部分領域10’は、被計測面2の中心Cを通る直線Lを平行移動させた直線L’で定義される領域であり、部分領域10’’は、中心Cを軸として部分領域10’を180度回転させた領域である。
【0032】
また、計測装置100の計測領域の外形形状は、S202で設定される部分領域の外形形状と必ずしも一致するものではない。一般的には、計測領域の大きさは部分領域の大きさよりも大きい(即ち、部分領域の大きさを計測領域の大きさよりも小さく設定する)ことが多い。このような場合には、被計測面2に対して設定された複数の部分領域のそれぞれを計測装置100の計測領域に位置決めして計測領域を計測装置100で計測し、複数の部分領域のそれぞれについて、その表面形状を含む計測データを取得すればよい。
【0033】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されないことはいうまでもなく、その要旨の範囲内で種々の変形及び変更が可能である。例えば、本実施形態では、被計測面に対して設定された各部分領域(の形状)を計測する計測装置として3次元計測装置を用いているが、干渉計を用いてもよい。
【特許請求の範囲】
【請求項1】
正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、
前記被計測面に対して、前記被計測面の全体を覆うように、平行四辺形の同一の外形を有する複数の部分領域を設定する第1ステップと、
前記複数の部分領域のそれぞれの表面形状を計測装置で計測し、前記複数の部分領域のそれぞれについて計測データを取得する第2ステップと、
前記複数の部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、
を有し、
前記平行四辺形は、120度と60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下であることを特徴とする計測方法。
【請求項2】
正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、
前記被計測面に対して、前記被計測面の全体を覆うように、三角形の同一の外形を有する複数の部分領域を設定する第1ステップと、
前記複数の部分領域のそれぞれの表面形状を計測装置で計測し、前記複数の部分領域のそれぞれについて計測データを取得する第2ステップと、
前記複数の部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、
を有し、
前記三角形は、60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下であることを特徴とする計測方法。
【請求項3】
正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、
前記被計測面に対して、前記被計測面の中心を通る直線で点対称に2分割された部分領域を設定する第1ステップと、
前記部分領域のそれぞれの表面形状を計測装置で計測し、前記部分領域のそれぞれについて計測データを取得する第2ステップと、
前記部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、
を有することを特徴とする計測方法。
【請求項4】
前記第3ステップは、
前記部分領域のそれぞれについて、前記部分領域のそれぞれの形状を前記計測装置で計測したときの計測誤差を直交関数系で定義するステップと、
前記複数の部分領域のそれぞれについて、前記直交関数系の係数を変数として含む目的関数を設定し、当該目的関数の値が許容範囲に収まるように前記係数を決定して前記計測誤差を求めるステップと、
前記計測誤差が除去された前記部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出するステップと、
を含むことを特徴とする請求項1乃至3のうちいずれか1項に記載の計測方法。
【請求項5】
正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、
前記被計測面に対して、前記被計測面の全体を覆うように、平行四辺形の同一の外形を有する複数の部分領域を設定する第1ステップと、
前記複数の部分領域のそれぞれを計測装置の計測領域に位置決めして前記計測領域を前記計測装置で計測し、前記複数の部分領域のそれぞれについて、前記複数の部分領域のそれぞれの表面形状を含む計測データを取得する第2ステップと、
前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、
を有し、
前記平行四辺形は、120度と60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下であることを特徴とする計測方法。
【請求項6】
前記計測領域の大きさは、前記部分領域の大きさよりも大きいことを特徴とする請求項5に記載の計測方法。
【請求項1】
正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、
前記被計測面に対して、前記被計測面の全体を覆うように、平行四辺形の同一の外形を有する複数の部分領域を設定する第1ステップと、
前記複数の部分領域のそれぞれの表面形状を計測装置で計測し、前記複数の部分領域のそれぞれについて計測データを取得する第2ステップと、
前記複数の部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、
を有し、
前記平行四辺形は、120度と60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下であることを特徴とする計測方法。
【請求項2】
正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、
前記被計測面に対して、前記被計測面の全体を覆うように、三角形の同一の外形を有する複数の部分領域を設定する第1ステップと、
前記複数の部分領域のそれぞれの表面形状を計測装置で計測し、前記複数の部分領域のそれぞれについて計測データを取得する第2ステップと、
前記複数の部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、
を有し、
前記三角形は、60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下であることを特徴とする計測方法。
【請求項3】
正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、
前記被計測面に対して、前記被計測面の中心を通る直線で点対称に2分割された部分領域を設定する第1ステップと、
前記部分領域のそれぞれの表面形状を計測装置で計測し、前記部分領域のそれぞれについて計測データを取得する第2ステップと、
前記部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、
を有することを特徴とする計測方法。
【請求項4】
前記第3ステップは、
前記部分領域のそれぞれについて、前記部分領域のそれぞれの形状を前記計測装置で計測したときの計測誤差を直交関数系で定義するステップと、
前記複数の部分領域のそれぞれについて、前記直交関数系の係数を変数として含む目的関数を設定し、当該目的関数の値が許容範囲に収まるように前記係数を決定して前記計測誤差を求めるステップと、
前記計測誤差が除去された前記部分領域のそれぞれの前記計測データをつなぎ合わせて前記被計測面の表面形状を算出するステップと、
を含むことを特徴とする請求項1乃至3のうちいずれか1項に記載の計測方法。
【請求項5】
正六角形の外形を有する被計測面の表面形状を計測する計測方法であって、
前記被計測面に対して、前記被計測面の全体を覆うように、平行四辺形の同一の外形を有する複数の部分領域を設定する第1ステップと、
前記複数の部分領域のそれぞれを計測装置の計測領域に位置決めして前記計測領域を前記計測装置で計測し、前記複数の部分領域のそれぞれについて、前記複数の部分領域のそれぞれの表面形状を含む計測データを取得する第2ステップと、
前記計測データをつなぎ合わせて前記被計測面の表面形状を算出する第3ステップと、
を有し、
前記平行四辺形は、120度と60度の内角を有し、一辺の最大の長さが前記正六角形の一辺の長さ以下であることを特徴とする計測方法。
【請求項6】
前記計測領域の大きさは、前記部分領域の大きさよりも大きいことを特徴とする請求項5に記載の計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−88315(P2013−88315A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−229894(P2011−229894)
【出願日】平成23年10月19日(2011.10.19)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月19日(2011.10.19)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]