
計測装置、欠陥検査装置及び計測方法
【課題】全体形状と局所的形状とを両方とも精度良く計測する。
【解決手段】プロジェクタ1は物体M上に映像を投影する。撮像装置2はプロジェクタ1によって物体M上に投影された映像を、プロジェクタ1とは異なる角度から撮像する。ステージ3及びステージ駆動装置4は、物体Mとプロジェクタ1及び撮像装置2との間の所定方向の相対走査を実行する。記憶部6には、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1によりY軸方向に延びるスリット像を基準となる物体M上に投影させたときに撮像装置2によって撮像される動画像も記憶されている。制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつプロジェクタ1により記憶部6に記憶された動画像を計測対象の物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
【解決手段】プロジェクタ1は物体M上に映像を投影する。撮像装置2はプロジェクタ1によって物体M上に投影された映像を、プロジェクタ1とは異なる角度から撮像する。ステージ3及びステージ駆動装置4は、物体Mとプロジェクタ1及び撮像装置2との間の所定方向の相対走査を実行する。記憶部6には、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1によりY軸方向に延びるスリット像を基準となる物体M上に投影させたときに撮像装置2によって撮像される動画像も記憶されている。制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつプロジェクタ1により記憶部6に記憶された動画像を計測対象の物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体の3次元計測を行う計測装置、欠陥検査装置及び計測方法に関する。
【背景技術】
【0002】
従来より、光切断法を用いた物体の3次元計測を行う計測装置が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−103921号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の光切断法では、計測対象の物体の全体形状の凹凸が激しい場合、その全体形状と局所的形状とを両方精度よく計測するのは困難である。全体形状を計測範囲に収めようとすれば、局所的形状の表れる範囲が相対的に小さくなるためである。
【0005】
本発明は、上記実情に鑑みてなされたものであり、全体形状と局所的形状とを両方とも精度良く計測することができる計測装置、欠陥検査装置及び計測方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の第1の観点に係る計測装置は、
物体上に映像を投影するプロジェクタと、
前記物体を、前記プロジェクタとは異なる角度から撮像する撮像装置と、
前記物体と前記プロジェクタ及び前記撮像装置との間の所定方向の相対走査を実行する走査機構と、
前記走査機構による相対走査を実行しつつ、前記プロジェクタにより前記所定方向に交差する方向に延びるスリット像を、基準物体上に投影させたときに前記撮像装置によって撮像された動画像を記憶する記憶部と、
前記走査機構による相対走査を実行しつつ前記プロジェクタにより前記記憶部に記憶された動画像を前記計測対象の物体上に投影させるとともに、前記撮像装置により前記物体上に投影された前記動画像を撮像させる制御部と、
を備える。
【0007】
この場合、前記撮像装置に撮像された前記物体に投影された前記動画像を表示する表示部をさらに備える、
こととしてもよい。
【0008】
また、前記撮像装置に撮像された前記物体に投影された前記動画像における前記スリット像の形状を検出する検出部をさらに備える、
こととしてもよい。
【0009】
本発明の第2の観点に係る欠陥検査装置は、
本発明の計測装置を用いて、物体の欠陥を検出する。
【0010】
本発明の第3の観点に係る計測方法は、
物体上に映像を投影するプロジェクタと、
前記物体を、前記プロジェクタとは異なる角度から撮像する撮像装置と、
前記物体と前記プロジェクタ及び前記撮像装置との間の所定方向の相対走査を実行する走査機構と、
を備える計測装置を用いた計測方法であって、
前記走査機構による相対走査を実行しつつ、前記プロジェクタにより前記所定方向に交差する方向に延びるスリット像を、基準物体上に投影させたときに前記撮像装置によって撮像された動画像を記憶する記憶工程と、
前記走査機構による相対走査を実行しつつ前記プロジェクタにより前記記憶工程において記憶された動画像を前記計測対象の物体上に投影させるとともに、前記撮像装置により前記物体上に投影された前記動画像を撮像させる計測工程と、
を含む。
【発明の効果】
【0011】
本発明によれば、所定方向に搬送される基準物体に投影されるスリット像が撮像装置により撮像されその動画像が記憶部に記憶される。計測対象の物体を計測する際には、その動画像が物体に投影される。
【0012】
基準物体と物体との3次元プロファイルが同じであれば、撮像装置によって撮像される物体上の動画像は一直線のスリット像となる。このため、基準物体との3次元プロファイルと物体の3次元プロファイルとに異なる部分があれば、一直線のスリット像のうち、その部分に対応する箇所だけが歪むようになるので、異なる部分を目立たせることができるようになる。
【0013】
このようにして、基準物体で大まかな全体形状を把握してから、基準物体と計測対象の物体との違いに基づいて局所的形状を計測することができるので、全体形状と局所的形状とを両方とも精度良く計測することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る計測装置の概略的な構成を示すブロック図である。
【図2】図1の計測装置を用いた初期計測の手順のフローチャートである。
【図3】図3(A)乃至図3(C)は、相対走査中に基準物体上に投影されるスリット像の様子を示す図である。
【図4】初期計測において撮像される像の一例を示す図である。
【図5】図1の計測装置を用いた通常計測の手順のフローチャートである。
【図6】通常計測において撮像される像の一例(その1)を示す図である。
【図7】通常計測において撮像される像の一例(その2)を示す図である。
【発明を実施するための形態】
【0015】
本発明の実施形態について、図面を参照して詳細に説明する。
【0016】
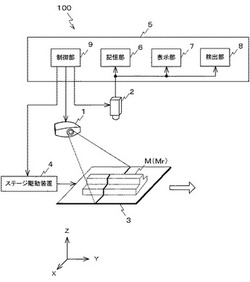
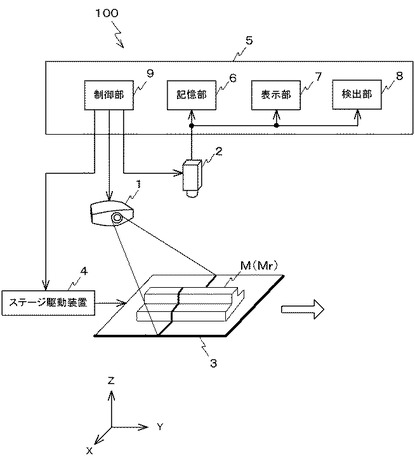
まず、図1を参照して、本実施形態に係る計測装置100の構成について説明する。図1に示すように、計測装置100は、プロジェクタ1と、撮像装置2と、ステージ3と、ステージ駆動装置4と、コンピュータ5と、を備える。
【0017】
計測装置100は、物体M(又は基準物体Mr)の3次元形状(3次元プロファイル)を計測する。本実施形態では、物体Mが搬送される方向をY軸方向とし、水平面内でY軸方向に直交する方向をX軸方向とし、高さ方向をZ軸方向とするXYZ座標系を規定して、説明を行う。物体Mは、所定方向に関して断面が一様な物体であるものとする。
【0018】
プロジェクタ1は、物体M上に映像を投影する。より具体的には、プロジェクタ1は、コンピュータ5の後述の記憶部6に記憶された映像を投影する。本実施形態では、プロジェクタ1は、斜め上方から、ステージ3上へ映像を投影している。
【0019】
撮像装置2は、例えば、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)カメラなどのイメージセンサである。撮像装置2は、物体Mを、プロジェクタ1とは異なる角度から撮像するように設置されている。より厳密には、撮像装置2は、プロジェクタ1から物体M上に投影された映像がその撮像視野内に収まるように設置されている。本実施形態では、撮像装置2は、+Z側(すなわち真上)から、ステージ3を撮像できるように設置されている。
【0020】
ステージ3には、物体Mが載置される。ステージ3は、Y軸方向に移動可能なテーブルである。物体Mは、断面形状が一様な所定方向をY軸方向として載置される。物体Mは、ステージ3には、物体Mを常に同じ位置に設置できるように位置決め機構(不図示)が設けられている。
【0021】
ステージ駆動装置4は、ステージ3を駆動して、Y軸方向に移動させる。ステージ3及びステージ駆動装置4がステージ3をY軸方向に移動させることにより、物体Mとプロジェクタ1及び撮像装置2との間のY軸方向の相対走査が実行される。
【0022】
コンピュータ5は、記憶部6と、表示部7と、検出部8と、制御部9とを備える。
【0023】
記憶部6には、プロジェクタ1によって投影される映像のデータが記憶されている。例えば、記憶部6には、Y軸方向に延びるスリットパターン像などが記憶されている。
【0024】
この記憶部6には、後述するように、ステージ3及びステージ駆動装置4による物体Mとプロジェクタ1及び撮像装置2との間の相対走査を実行しつつ、プロジェクタ1によりX軸方向に交差する方向に延びるスリット像を、基準物体Mr上に投影させたときに撮像装置2によって撮像された動画像も記憶されている。
【0025】
表示部7は、撮像装置2によって撮像された物体Mを表示する。プロジェクタ1から物体Mに映像が投影されている場合には、表示部7には、その投影された映像が表示される。ユーザは、表示部7に表示された物体Mに投影された映像を見て、物体Mの全体形状や局所的形状を把握することができる。
【0026】
検出部8は、撮像装置2によって撮像された物体Mに投影された映像の撮像結果に基づいて、物体Mの3次元形状を検出する。
【0027】
制御部9は、CPU及びメモリ(いずれも不図示)を備えており、CPUがメモリに保持されたプログラムを実行することにより、プロジェクタ1、撮像装置2、ステージ3及びステージ駆動装置4を制御する。例えば、制御部9は、ステージ3及びステージ駆動装置4による物体Mとプロジェクタ1及び撮像装置2との間の相対走査を実行しつつ、プロジェクタ1により記憶部6に記憶された動画像に基づく映像を物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
【0028】
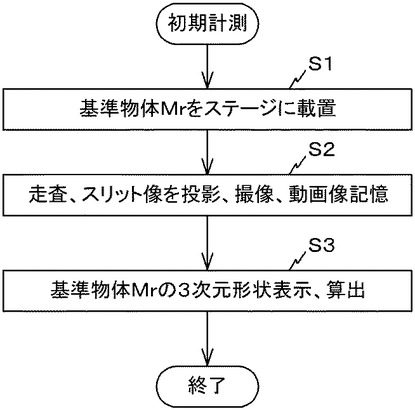
次に、本実施形態に係る計測装置100を用いた計測方法について説明する。図2には、この計測装置100を用いた初期計測のフローチャートが示されている。
【0029】
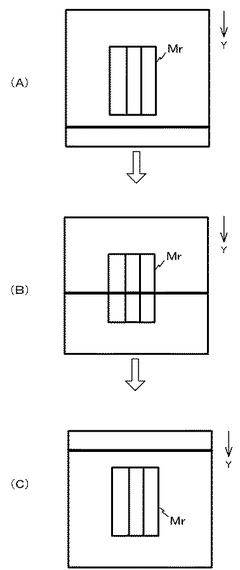
図3に示すように、まず、基準物体Mrが図1の物体Mと同じ位置及び向きでステージ3に載置される(ステップS1)。基準物体Mrとしては、物体Mと形状が同一で、形状に欠陥がないものが用いられる。
【0030】
続いて、コンピュータ5の制御部9は、ステージ3及びステージ駆動装置4による物体Mとプロジェクタ1及び撮像装置2との間の相対走査を実行しつつ、プロジェクタ1によりX軸方向に延びるスリット像を、基準物体Mr上に投影させるとともに、撮像装置2によって基準物体Mr上に投影されたスリット像を撮像させ、撮像された動画像を記憶部6に記憶させる(ステップS2)。
【0031】
より具体的には、制御部9は、ステージ駆動装置4を制御して、ステージ3を図3(A)に示す原点位置から、例えば+Y方向に一定速度Vで移動を開始させる。なお、制御部9は、これと同時に、プロジェクタ1によるスリット像の投影を開始させる。さらに、制御部9は、プロジェクタ1により、基準物体Mr上に投影されたスリット像の撮像を開始させる。
【0032】
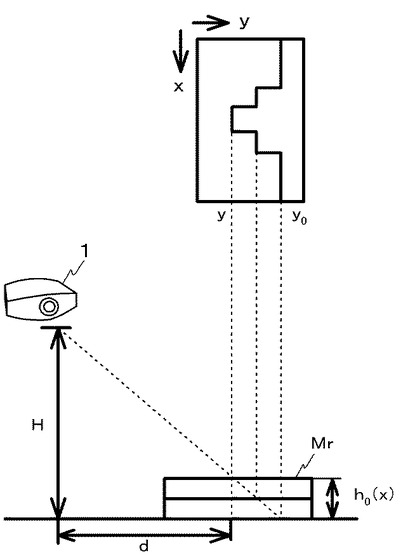
図4に示すように、プロジェクタ1によって投影されるスリット像は、基準物体Mrの3次元プロファイルに応じた像として、撮像装置2によって撮像される。記憶部6は、例えば、図4に示すようなスリット像を記憶することとなる。
【0033】
なお、基準物体Mrの載置面からのプロジェクタ1の高さをHとし、撮像装置2によって撮像される像の幅を(y−y0)とし、プロジェクタ1から、像の投影位置までのY軸方向の距離をdとすると、基準物体Mrの全高h0(x)は、次式で表される。
【数1】

続いて、表示部7は、撮像装置2によって撮像された画像(図4に示すような画像)を表示するとともに、検出部8は、上記式(1)等を用いて、基準物体Mrの3次元形状を算出する(ステップS3)。
【0034】
ステップS3終了後、計測装置100は、初期計測を終了する。
【0035】
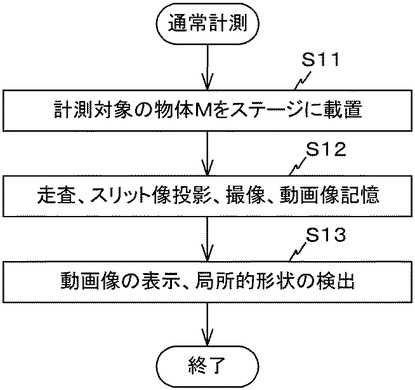
次に、計測装置100を用いた通常計測について説明する。図5には、通常計測のフローチャートが示されている。図5に示すように、まず、基準物体Mrの代わりに、計測対象となる物体Mがステージ3に載置される(ステップS11)。ステージ3における物体Mの載置される位置は、位置決め機構によって、基準物体Mrが載置されていた位置と同一の位置に設置される。
【0036】
続いて、コンピュータ5の制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1により記憶部6に記憶された動画像を、プロジェクタ1により物体M上に投影させるとともに、撮像装置2によって物体M上に投影された像を撮像させ、撮像された動画像を記憶部6に記憶させる(ステップS12)。
【0037】
より具体的には、制御部9は、ステージ駆動装置4を制御して、ステージ3を、図3(A)に示す原点位置から、例えば+Y方向に一定速度Vで移動を開始させる。なお、制御部9は、これと同時に、プロジェクタ1による動画像の投影を開始させる。さらに、制御部9は、プロジェクタ1により、物体M上に投影されたスリット像の撮像を開始させ、その動画像を記憶部6に記憶する。
【0038】
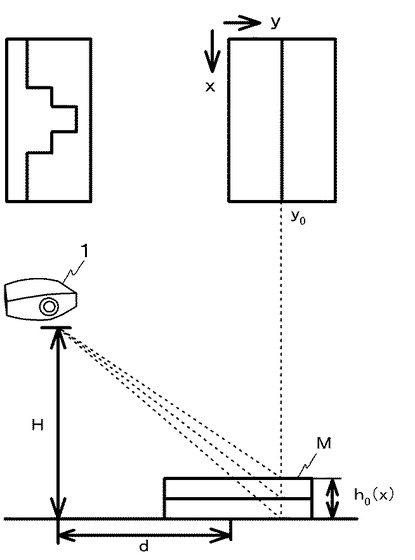
図6に示すように、プロジェクタ1によって投影される動画像は、基準物体Mrの3次元プロファイルに応じた像となっているため、物体Mの3次元プロファイルが、基準物体Mrの3次元プロファイルと同一であれば、撮像装置2によって撮像される像は、X軸方向に延びる直線状となる。なお、プロジェクタ1から投影される映像は、撮像装置2によって撮像される像が直線となるように、記憶部6に記憶された動画像の向きやスケーリングが調整されている。
【0039】
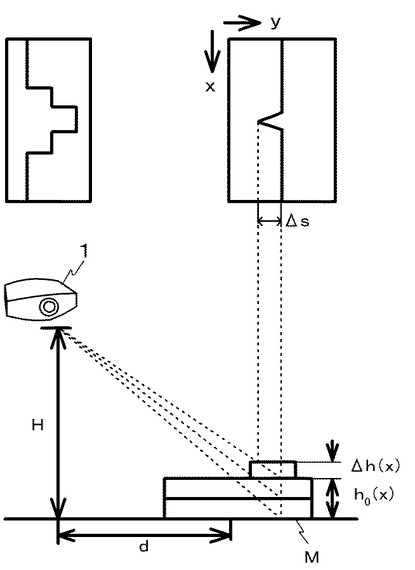
続いて、表示部7が記憶部6に記憶された動画像を表示し、検出部8が物体Mの局所的形状を検出する(ステップS13)。図7に示すように、例えば、物体M上に基準物体Mrとは異なる微小な凸部があった場合、その凸部により、撮像させる直線の像に歪みが生じる。検出部8は、このような歪みを検出する。
【0040】
表示部7に表示される像は、直線であるので、このような歪みは非常に見立つようになる。このため、表示部7を見るユーザが、物体Mに形成された凸部を発見し易くなっている。
【0041】
なお、凸部の高さΔh(x)は、計測される歪みの高さをΔsとすると、次式で表される。
【数2】
なお、基準物体Mrの3次元形状と物体Mとの3次元形状とが全体的に異なる場合であっても、ステップS3によって検出された基準物体Mrの高さh0(x)に、上記式(2)によって求められたΔh(x)を、上記式(3)のように加算することにより、物体Mの全体形状を求めることができる。また、検出部8は、撮像装置2によって高分解能に撮像された画像から得られるΔh(x)に基づいて、物体Mの局所的形状も高精度に検出することができる。
【0042】
以上詳細に説明したように、本実施形態によれば、Y軸方向に搬送される基準物体Mrに投影されるスリット像が撮像装置2により撮像され、その動画像が記憶部6に記憶される。計測対象の物体Mを計測する際には、その動画像が物体Mに投影される。
【0043】
基準物体Mrと物体Mとの3次元プロファイルが同じであれば、撮像装置2によって撮像される物体M上に投影される動画像は一直線のスリット像となる。このため、基準物体Mrとの3次元プロファイルと物体Mの3次元プロファイルとに異なる部分があれば、一直線のスリット像のうち、その部分に対応する箇所だけが歪むようになるので、異なる部分を目立たせることができるようになる。
【0044】
このようにして、基準物体Mrで大まかな全体形状を把握してから、基準物体Mrと計測対象の物体との違いに基づいて局所的形状を計測することができるので、全体形状と局所的形状とを両方とも精度良く計測することができる。
【0045】
なお、本実施形態では、Y軸方向で形状が一様な物体Mを計測対象としたが、本発明はこれには限られない。Y軸方向に高さが変化する物体Mの計測にも適用可能である。この場合には、初期計測によって記憶部6に記憶される動画像を撮像したときのタイミングと、その動画像をプロジェクタ1から投影する際のタイミングとを同期させる必要がある。
【0046】
本実施形態に係る計測装置100は、物体Mの欠陥を検査する装置として用いることが可能である。回路基板の回路の欠陥や、製品の形状欠陥などに、計測装置100を適用することができる。また、圧延された金属の検査にも用いることができる。
【0047】
なお、上記実施の形態において、実行されるプログラムは、フレキシブルディスク、CD−ROM(Compact Disc Read-Only Memory)、DVD(Digital Versatile Disc)、MO(Magneto-Optical Disc)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをインストールすることにより、上述のスレッドを実行するシステムを構成することとしてもよい。
【0048】
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、ダウンロード等するようにしてもよい。
【0049】
また、上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、ダウンロード等してもよい。
【0050】
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施の形態及び変形が可能とされるものである。また、上述した実施の形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。すなわち、本発明の範囲、実施の形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【産業上の利用可能性】
【0051】
本発明は、物体の3次元プロファイルを計測するのに好適であり、さらに物体の欠陥を検出するのに好適である。
【符号の説明】
【0052】
1 プロジェクタ
2 撮像装置
3 ステージ
4 ステージ駆動装置
5 コンピュータ
6 記憶部
7 表示部
8 検出部
9 制御部
100 計測装置
M 物体
Mr 基準物体
【技術分野】
【0001】
本発明は、物体の3次元計測を行う計測装置、欠陥検査装置及び計測方法に関する。
【背景技術】
【0002】
従来より、光切断法を用いた物体の3次元計測を行う計測装置が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−103921号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の光切断法では、計測対象の物体の全体形状の凹凸が激しい場合、その全体形状と局所的形状とを両方精度よく計測するのは困難である。全体形状を計測範囲に収めようとすれば、局所的形状の表れる範囲が相対的に小さくなるためである。
【0005】
本発明は、上記実情に鑑みてなされたものであり、全体形状と局所的形状とを両方とも精度良く計測することができる計測装置、欠陥検査装置及び計測方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の第1の観点に係る計測装置は、
物体上に映像を投影するプロジェクタと、
前記物体を、前記プロジェクタとは異なる角度から撮像する撮像装置と、
前記物体と前記プロジェクタ及び前記撮像装置との間の所定方向の相対走査を実行する走査機構と、
前記走査機構による相対走査を実行しつつ、前記プロジェクタにより前記所定方向に交差する方向に延びるスリット像を、基準物体上に投影させたときに前記撮像装置によって撮像された動画像を記憶する記憶部と、
前記走査機構による相対走査を実行しつつ前記プロジェクタにより前記記憶部に記憶された動画像を前記計測対象の物体上に投影させるとともに、前記撮像装置により前記物体上に投影された前記動画像を撮像させる制御部と、
を備える。
【0007】
この場合、前記撮像装置に撮像された前記物体に投影された前記動画像を表示する表示部をさらに備える、
こととしてもよい。
【0008】
また、前記撮像装置に撮像された前記物体に投影された前記動画像における前記スリット像の形状を検出する検出部をさらに備える、
こととしてもよい。
【0009】
本発明の第2の観点に係る欠陥検査装置は、
本発明の計測装置を用いて、物体の欠陥を検出する。
【0010】
本発明の第3の観点に係る計測方法は、
物体上に映像を投影するプロジェクタと、
前記物体を、前記プロジェクタとは異なる角度から撮像する撮像装置と、
前記物体と前記プロジェクタ及び前記撮像装置との間の所定方向の相対走査を実行する走査機構と、
を備える計測装置を用いた計測方法であって、
前記走査機構による相対走査を実行しつつ、前記プロジェクタにより前記所定方向に交差する方向に延びるスリット像を、基準物体上に投影させたときに前記撮像装置によって撮像された動画像を記憶する記憶工程と、
前記走査機構による相対走査を実行しつつ前記プロジェクタにより前記記憶工程において記憶された動画像を前記計測対象の物体上に投影させるとともに、前記撮像装置により前記物体上に投影された前記動画像を撮像させる計測工程と、
を含む。
【発明の効果】
【0011】
本発明によれば、所定方向に搬送される基準物体に投影されるスリット像が撮像装置により撮像されその動画像が記憶部に記憶される。計測対象の物体を計測する際には、その動画像が物体に投影される。
【0012】
基準物体と物体との3次元プロファイルが同じであれば、撮像装置によって撮像される物体上の動画像は一直線のスリット像となる。このため、基準物体との3次元プロファイルと物体の3次元プロファイルとに異なる部分があれば、一直線のスリット像のうち、その部分に対応する箇所だけが歪むようになるので、異なる部分を目立たせることができるようになる。
【0013】
このようにして、基準物体で大まかな全体形状を把握してから、基準物体と計測対象の物体との違いに基づいて局所的形状を計測することができるので、全体形状と局所的形状とを両方とも精度良く計測することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る計測装置の概略的な構成を示すブロック図である。
【図2】図1の計測装置を用いた初期計測の手順のフローチャートである。
【図3】図3(A)乃至図3(C)は、相対走査中に基準物体上に投影されるスリット像の様子を示す図である。
【図4】初期計測において撮像される像の一例を示す図である。
【図5】図1の計測装置を用いた通常計測の手順のフローチャートである。
【図6】通常計測において撮像される像の一例(その1)を示す図である。
【図7】通常計測において撮像される像の一例(その2)を示す図である。
【発明を実施するための形態】
【0015】
本発明の実施形態について、図面を参照して詳細に説明する。
【0016】
まず、図1を参照して、本実施形態に係る計測装置100の構成について説明する。図1に示すように、計測装置100は、プロジェクタ1と、撮像装置2と、ステージ3と、ステージ駆動装置4と、コンピュータ5と、を備える。
【0017】
計測装置100は、物体M(又は基準物体Mr)の3次元形状(3次元プロファイル)を計測する。本実施形態では、物体Mが搬送される方向をY軸方向とし、水平面内でY軸方向に直交する方向をX軸方向とし、高さ方向をZ軸方向とするXYZ座標系を規定して、説明を行う。物体Mは、所定方向に関して断面が一様な物体であるものとする。
【0018】
プロジェクタ1は、物体M上に映像を投影する。より具体的には、プロジェクタ1は、コンピュータ5の後述の記憶部6に記憶された映像を投影する。本実施形態では、プロジェクタ1は、斜め上方から、ステージ3上へ映像を投影している。
【0019】
撮像装置2は、例えば、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)カメラなどのイメージセンサである。撮像装置2は、物体Mを、プロジェクタ1とは異なる角度から撮像するように設置されている。より厳密には、撮像装置2は、プロジェクタ1から物体M上に投影された映像がその撮像視野内に収まるように設置されている。本実施形態では、撮像装置2は、+Z側(すなわち真上)から、ステージ3を撮像できるように設置されている。
【0020】
ステージ3には、物体Mが載置される。ステージ3は、Y軸方向に移動可能なテーブルである。物体Mは、断面形状が一様な所定方向をY軸方向として載置される。物体Mは、ステージ3には、物体Mを常に同じ位置に設置できるように位置決め機構(不図示)が設けられている。
【0021】
ステージ駆動装置4は、ステージ3を駆動して、Y軸方向に移動させる。ステージ3及びステージ駆動装置4がステージ3をY軸方向に移動させることにより、物体Mとプロジェクタ1及び撮像装置2との間のY軸方向の相対走査が実行される。
【0022】
コンピュータ5は、記憶部6と、表示部7と、検出部8と、制御部9とを備える。
【0023】
記憶部6には、プロジェクタ1によって投影される映像のデータが記憶されている。例えば、記憶部6には、Y軸方向に延びるスリットパターン像などが記憶されている。
【0024】
この記憶部6には、後述するように、ステージ3及びステージ駆動装置4による物体Mとプロジェクタ1及び撮像装置2との間の相対走査を実行しつつ、プロジェクタ1によりX軸方向に交差する方向に延びるスリット像を、基準物体Mr上に投影させたときに撮像装置2によって撮像された動画像も記憶されている。
【0025】
表示部7は、撮像装置2によって撮像された物体Mを表示する。プロジェクタ1から物体Mに映像が投影されている場合には、表示部7には、その投影された映像が表示される。ユーザは、表示部7に表示された物体Mに投影された映像を見て、物体Mの全体形状や局所的形状を把握することができる。
【0026】
検出部8は、撮像装置2によって撮像された物体Mに投影された映像の撮像結果に基づいて、物体Mの3次元形状を検出する。
【0027】
制御部9は、CPU及びメモリ(いずれも不図示)を備えており、CPUがメモリに保持されたプログラムを実行することにより、プロジェクタ1、撮像装置2、ステージ3及びステージ駆動装置4を制御する。例えば、制御部9は、ステージ3及びステージ駆動装置4による物体Mとプロジェクタ1及び撮像装置2との間の相対走査を実行しつつ、プロジェクタ1により記憶部6に記憶された動画像に基づく映像を物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
【0028】
次に、本実施形態に係る計測装置100を用いた計測方法について説明する。図2には、この計測装置100を用いた初期計測のフローチャートが示されている。
【0029】
図3に示すように、まず、基準物体Mrが図1の物体Mと同じ位置及び向きでステージ3に載置される(ステップS1)。基準物体Mrとしては、物体Mと形状が同一で、形状に欠陥がないものが用いられる。
【0030】
続いて、コンピュータ5の制御部9は、ステージ3及びステージ駆動装置4による物体Mとプロジェクタ1及び撮像装置2との間の相対走査を実行しつつ、プロジェクタ1によりX軸方向に延びるスリット像を、基準物体Mr上に投影させるとともに、撮像装置2によって基準物体Mr上に投影されたスリット像を撮像させ、撮像された動画像を記憶部6に記憶させる(ステップS2)。
【0031】
より具体的には、制御部9は、ステージ駆動装置4を制御して、ステージ3を図3(A)に示す原点位置から、例えば+Y方向に一定速度Vで移動を開始させる。なお、制御部9は、これと同時に、プロジェクタ1によるスリット像の投影を開始させる。さらに、制御部9は、プロジェクタ1により、基準物体Mr上に投影されたスリット像の撮像を開始させる。
【0032】
図4に示すように、プロジェクタ1によって投影されるスリット像は、基準物体Mrの3次元プロファイルに応じた像として、撮像装置2によって撮像される。記憶部6は、例えば、図4に示すようなスリット像を記憶することとなる。
【0033】
なお、基準物体Mrの載置面からのプロジェクタ1の高さをHとし、撮像装置2によって撮像される像の幅を(y−y0)とし、プロジェクタ1から、像の投影位置までのY軸方向の距離をdとすると、基準物体Mrの全高h0(x)は、次式で表される。
【数1】
続いて、表示部7は、撮像装置2によって撮像された画像(図4に示すような画像)を表示するとともに、検出部8は、上記式(1)等を用いて、基準物体Mrの3次元形状を算出する(ステップS3)。
【0034】
ステップS3終了後、計測装置100は、初期計測を終了する。
【0035】
次に、計測装置100を用いた通常計測について説明する。図5には、通常計測のフローチャートが示されている。図5に示すように、まず、基準物体Mrの代わりに、計測対象となる物体Mがステージ3に載置される(ステップS11)。ステージ3における物体Mの載置される位置は、位置決め機構によって、基準物体Mrが載置されていた位置と同一の位置に設置される。
【0036】
続いて、コンピュータ5の制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1により記憶部6に記憶された動画像を、プロジェクタ1により物体M上に投影させるとともに、撮像装置2によって物体M上に投影された像を撮像させ、撮像された動画像を記憶部6に記憶させる(ステップS12)。
【0037】
より具体的には、制御部9は、ステージ駆動装置4を制御して、ステージ3を、図3(A)に示す原点位置から、例えば+Y方向に一定速度Vで移動を開始させる。なお、制御部9は、これと同時に、プロジェクタ1による動画像の投影を開始させる。さらに、制御部9は、プロジェクタ1により、物体M上に投影されたスリット像の撮像を開始させ、その動画像を記憶部6に記憶する。
【0038】
図6に示すように、プロジェクタ1によって投影される動画像は、基準物体Mrの3次元プロファイルに応じた像となっているため、物体Mの3次元プロファイルが、基準物体Mrの3次元プロファイルと同一であれば、撮像装置2によって撮像される像は、X軸方向に延びる直線状となる。なお、プロジェクタ1から投影される映像は、撮像装置2によって撮像される像が直線となるように、記憶部6に記憶された動画像の向きやスケーリングが調整されている。
【0039】
続いて、表示部7が記憶部6に記憶された動画像を表示し、検出部8が物体Mの局所的形状を検出する(ステップS13)。図7に示すように、例えば、物体M上に基準物体Mrとは異なる微小な凸部があった場合、その凸部により、撮像させる直線の像に歪みが生じる。検出部8は、このような歪みを検出する。
【0040】
表示部7に表示される像は、直線であるので、このような歪みは非常に見立つようになる。このため、表示部7を見るユーザが、物体Mに形成された凸部を発見し易くなっている。
【0041】
なお、凸部の高さΔh(x)は、計測される歪みの高さをΔsとすると、次式で表される。
【数2】
なお、基準物体Mrの3次元形状と物体Mとの3次元形状とが全体的に異なる場合であっても、ステップS3によって検出された基準物体Mrの高さh0(x)に、上記式(2)によって求められたΔh(x)を、上記式(3)のように加算することにより、物体Mの全体形状を求めることができる。また、検出部8は、撮像装置2によって高分解能に撮像された画像から得られるΔh(x)に基づいて、物体Mの局所的形状も高精度に検出することができる。
【0042】
以上詳細に説明したように、本実施形態によれば、Y軸方向に搬送される基準物体Mrに投影されるスリット像が撮像装置2により撮像され、その動画像が記憶部6に記憶される。計測対象の物体Mを計測する際には、その動画像が物体Mに投影される。
【0043】
基準物体Mrと物体Mとの3次元プロファイルが同じであれば、撮像装置2によって撮像される物体M上に投影される動画像は一直線のスリット像となる。このため、基準物体Mrとの3次元プロファイルと物体Mの3次元プロファイルとに異なる部分があれば、一直線のスリット像のうち、その部分に対応する箇所だけが歪むようになるので、異なる部分を目立たせることができるようになる。
【0044】
このようにして、基準物体Mrで大まかな全体形状を把握してから、基準物体Mrと計測対象の物体との違いに基づいて局所的形状を計測することができるので、全体形状と局所的形状とを両方とも精度良く計測することができる。
【0045】
なお、本実施形態では、Y軸方向で形状が一様な物体Mを計測対象としたが、本発明はこれには限られない。Y軸方向に高さが変化する物体Mの計測にも適用可能である。この場合には、初期計測によって記憶部6に記憶される動画像を撮像したときのタイミングと、その動画像をプロジェクタ1から投影する際のタイミングとを同期させる必要がある。
【0046】
本実施形態に係る計測装置100は、物体Mの欠陥を検査する装置として用いることが可能である。回路基板の回路の欠陥や、製品の形状欠陥などに、計測装置100を適用することができる。また、圧延された金属の検査にも用いることができる。
【0047】
なお、上記実施の形態において、実行されるプログラムは、フレキシブルディスク、CD−ROM(Compact Disc Read-Only Memory)、DVD(Digital Versatile Disc)、MO(Magneto-Optical Disc)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをインストールすることにより、上述のスレッドを実行するシステムを構成することとしてもよい。
【0048】
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、ダウンロード等するようにしてもよい。
【0049】
また、上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、ダウンロード等してもよい。
【0050】
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施の形態及び変形が可能とされるものである。また、上述した実施の形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。すなわち、本発明の範囲、実施の形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【産業上の利用可能性】
【0051】
本発明は、物体の3次元プロファイルを計測するのに好適であり、さらに物体の欠陥を検出するのに好適である。
【符号の説明】
【0052】
1 プロジェクタ
2 撮像装置
3 ステージ
4 ステージ駆動装置
5 コンピュータ
6 記憶部
7 表示部
8 検出部
9 制御部
100 計測装置
M 物体
Mr 基準物体
【特許請求の範囲】
【請求項1】
物体上に映像を投影するプロジェクタと、
前記物体を、前記プロジェクタとは異なる角度から撮像する撮像装置と、
前記物体と前記プロジェクタ及び前記撮像装置との間の所定方向の相対走査を実行する走査機構と、
前記走査機構による相対走査を実行しつつ、前記プロジェクタにより前記所定方向に交差する方向に延びるスリット像を、基準物体上に投影させたときに前記撮像装置によって撮像された動画像を記憶する記憶部と、
前記走査機構による相対走査を実行しつつ前記プロジェクタにより前記記憶部に記憶された動画像を前記計測対象の物体上に投影させるとともに、前記撮像装置により前記物体上に投影された前記動画像を撮像させる制御部と、
を備える計測装置。
【請求項2】
前記撮像装置に撮像された前記物体に投影された前記動画像を表示する表示部をさらに備える、
ことを特徴とする請求項1に記載の計測装置。
【請求項3】
前記撮像装置に撮像された前記物体に投影された前記動画像における前記スリット像の形状を検出する検出部をさらに備える、
ことを特徴とする請求項1に記載の計測装置。
【請求項4】
請求項1乃至3のいずれか一項に記載の計測装置を用いて、物体の欠陥を検出する欠陥検査装置。
【請求項5】
物体上に映像を投影するプロジェクタと、
前記物体を、前記プロジェクタとは異なる角度から撮像する撮像装置と、
前記物体と前記プロジェクタ及び前記撮像装置との間の所定方向の相対走査を実行する走査機構と、
を備える計測装置を用いた計測方法であって、
前記走査機構による相対走査を実行しつつ、前記プロジェクタにより前記所定方向に交差する方向に延びるスリット像を、基準物体上に投影させたときに前記撮像装置によって撮像された動画像を記憶する記憶工程と、
前記走査機構による相対走査を実行しつつ前記プロジェクタにより前記記憶工程において記憶された動画像を前記計測対象の物体上に投影させるとともに、前記撮像装置により前記物体上に投影された前記動画像を撮像させる計測工程と、
を含む計測方法。
【請求項1】
物体上に映像を投影するプロジェクタと、
前記物体を、前記プロジェクタとは異なる角度から撮像する撮像装置と、
前記物体と前記プロジェクタ及び前記撮像装置との間の所定方向の相対走査を実行する走査機構と、
前記走査機構による相対走査を実行しつつ、前記プロジェクタにより前記所定方向に交差する方向に延びるスリット像を、基準物体上に投影させたときに前記撮像装置によって撮像された動画像を記憶する記憶部と、
前記走査機構による相対走査を実行しつつ前記プロジェクタにより前記記憶部に記憶された動画像を前記計測対象の物体上に投影させるとともに、前記撮像装置により前記物体上に投影された前記動画像を撮像させる制御部と、
を備える計測装置。
【請求項2】
前記撮像装置に撮像された前記物体に投影された前記動画像を表示する表示部をさらに備える、
ことを特徴とする請求項1に記載の計測装置。
【請求項3】
前記撮像装置に撮像された前記物体に投影された前記動画像における前記スリット像の形状を検出する検出部をさらに備える、
ことを特徴とする請求項1に記載の計測装置。
【請求項4】
請求項1乃至3のいずれか一項に記載の計測装置を用いて、物体の欠陥を検出する欠陥検査装置。
【請求項5】
物体上に映像を投影するプロジェクタと、
前記物体を、前記プロジェクタとは異なる角度から撮像する撮像装置と、
前記物体と前記プロジェクタ及び前記撮像装置との間の所定方向の相対走査を実行する走査機構と、
を備える計測装置を用いた計測方法であって、
前記走査機構による相対走査を実行しつつ、前記プロジェクタにより前記所定方向に交差する方向に延びるスリット像を、基準物体上に投影させたときに前記撮像装置によって撮像された動画像を記憶する記憶工程と、
前記走査機構による相対走査を実行しつつ前記プロジェクタにより前記記憶工程において記憶された動画像を前記計測対象の物体上に投影させるとともに、前記撮像装置により前記物体上に投影された前記動画像を撮像させる計測工程と、
を含む計測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−208003(P2012−208003A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−73644(P2011−73644)
【出願日】平成23年3月29日(2011.3.29)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月29日(2011.3.29)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
[ Back to top ]