
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、路面上に存在する対象物の高さを計測する計測装置、計測方法、及びプログラムに関する。
【背景技術】
【0002】
有料道路等の通路におけるロードプライシングにおいて、徴収する料金は車種毎に異なる。そのため、通路に設けられる路側装置は、車種を判別するために車両の高さを計測する必要がある。車両の高さの計測には、例えばレーザセンサを用いた計測方法が用いられる。
【0003】
レーザにより車高を計測する方法として、路面上方に設けられたレーザセンサが路面に向けてレーザを走査し、走査されたレーザの反射光の強度や、レーザの照射から反射光の受光までの時間を計測する方法がある(例えば、特許文献1を参照)。具体的には、レーザセンサの設置高さから、レーザセンサから車両までの長さを減算することで、車高の算出を行っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−8188号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、路面には雨水などを路側へ流すための水勾配が設けられたり、車両の通行により轍が形成されたりするため、必ずしも路面が平坦であるとは限らない。そのため、レーザセンサの設置高さは路面上の点毎に異なる可能性があり、上述した方法を用いた場合、正確に車高を算出することができないおそれがある。
本発明は、上記の問題に鑑みてなされたものであり、平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明は上記の課題を解決するためになされたものであり、路面上に存在する対象物の高さを計測する計測装置であって、路面上方の基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測する距離計測部と、路面上の点と、前記基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部と、前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定する路面高特定部と、前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する高さ算出部とを備えることを特徴とする。
【0007】
また、本発明においては、前記反射点毎に、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であるか否かを判定する対象物判定部と、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であると判定された反射点が存在する場合に、当該反射点の路面高に基づいて前記記憶部が記憶する路面高情報を更新する更新部と、を備え、前記高さ算出部は、前記更新部によって路面高情報が更新された後に前記路面高特定部が特定した路面高を用いて路面から前記反射点までの長さを算出することが好ましい。
【0008】
また、本発明においては、路面状態の良否を判定する路面状態判定部を備え、前記更新部は、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であると判定された反射点が存在し、かつ前記路面状態判定部が路面状態が良いと判定した場合にのみ、前記反射点の路面高に基づいて前記記憶部が記憶する路面高情報を更新することが好ましい。
【0009】
また、本発明においては、前記路面状態判定部は、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した距離との差が所定の閾値以下であると判定された反射点が存在する場合において、当該反射点それぞれにおいて反射された反射光の強度の散布度が所定値以下のときに、路面状態が良いと判定することが好ましい。
【0010】
また、本発明においては、前記反射点に車両が存在するか否かを判定する車両判定部と、前記車両判定部によって車両が存在すると判定された場合に、当該車両の車輪が存在する位置を特定する車輪位置特定部とを備え、前記路面高特定部は、前記車輪位置特定部によって特定された車輪位置に基づいて、前記車両が存在する点の路面高を特定することが好ましい。
【0011】
また、本発明においては、前記車両判定部は、前記反射点のうち、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した距離との差が所定の閾値を超えると判定された反射点が所定の幅に亘って連続して存在する場合に、当該連続する反射点の位置に車両が存在すると判定することが好ましい。
【0012】
また、本発明は、路面上の点と、路面上方の基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部を備え、路面上に存在する対象物の高さを計測する計測装置を用いた計測方法であって、距離計測部は、前記基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測し、路面高特定部は、前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定し、高さ算出部は、前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出することを特徴とする。
【0013】
また、本発明は、路面上の点と、路面上方の基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部を備え、路面上に存在する対象物の高さを計測する計測装置を、前記基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測する距離計測部、前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定する路面高特定部、前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する高さ算出部として機能させるためのプログラムである。
【発明の効果】
【0014】
本発明によれば、計測装置は、記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定し、当該路面高を用いて対象物の高さを算出する。これにより、計測装置は、平坦でない路面上に存在する対象物の高さを正確に計算することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態による計測装置の構成図である。
【図2】情報処理装置の構成を示す概略ブロック図である。
【図3】記憶部が記憶する路面高テーブルの例を示す図である。
【図4】本実施形態における情報処理装置の動作を示すフローチャートである。
【図5】路面を走行する車両の例を示す図である。
【発明を実施するための形態】
【0016】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
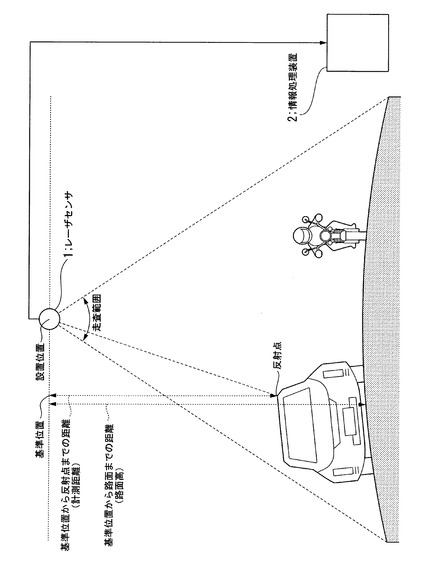
図1は、本発明の一実施形態による計測装置の構成図である。
計測装置は、レーザセンサ1(距離計測部)と情報処理装置2とを備える。
【0017】
レーザセンサ1は、カンチレバーやガントリを介して路面上方に設置され、当該設置位置から路面に向けてレーザを走査させる。レーザセンサ1は、路面に向けてレーザを走査させることで、路面上の複数の点へ向けてレーザを射出する。また、レーザセンサ1は、走査させたレーザの反射光に基づいて、所定の基準位置から当該レーザが反射された点である反射点までの距離(計測距離)を計測する。本実施形態において基準位置とは、レーザセンサ1の設置位置と同じ高さの位置であって、反射点の直上の位置のことである。つまり本実施形態において計測距離とは、レーザセンサ1の設置位置の高さと反射点の高さとの差と等価である。なお、レーザセンサ1が出力する反射点と計測距離との関係の例としては、レーザセンサの原点からの走査角θと、当該走査角θにおける反射点までの直線距離Lとで示される極座標系の関係や、レーザセンサ1の設置位置を原点とする水平方向の位置Xと、当該位置Xから反射点までの垂直方向の距離Yとで示される直交座標系の関係などが挙げられる。なお、レーザセンサ1が直交座標系の関係を出力する場合、レーザセンサ1が走査角θと直線距離Lとを用いて、X=Lsinθ、Y=Lcosθを算出することで、位置Xと距離Yの関係を出力することとなる。
情報処理装置2は、レーザセンサ1が計測した距離に基づいて、路面上に存在する車両(対象物)の高さを算出する。
【0018】
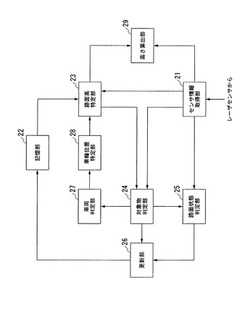
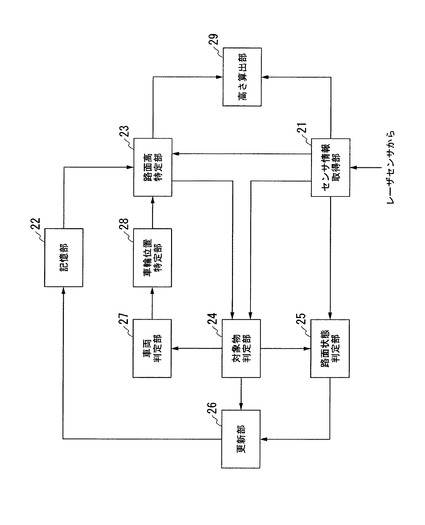
図2は、情報処理装置2の構成を示す概略ブロック図である。
情報処理装置2は、センサ情報取得部21、記憶部22、路面高特定部23、対象物判定部24、路面状態判定部25、更新部26、車両判定部27、車輪位置特定部28、高さ算出部29を備える。
【0019】
センサ情報取得部21は、レーザセンサ1から反射点毎に、当該反射点の路面幅方向の位置を示す座標(例えば、路側からの距離)に関連付けて計測距離を取得する。
【0020】
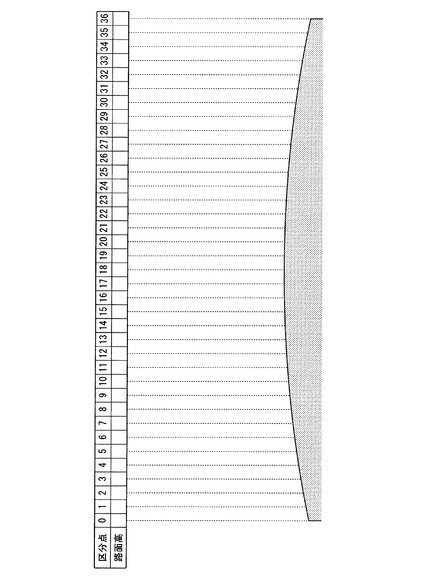
図3は、記憶部22が記憶する路面高テーブルの例を示す図である。
記憶部22は、路面上の点と、当該点に対応する基準位置から当該点までの距離である路面高とを関連付けて格納する路面高テーブル(路面高情報)を記憶する。路面高テーブルの例としては、図3に示すように、路面を幅方向に10センチメートルごとに区分したときの区分点に関連付けて、当該区分点毎の高さを格納するものが挙げられる。
当該路面高テーブルは、予め対象物が存在しないときの路面高をレーザセンサ1により計測しておき、当該計測値を路面上の点に関連付けて記録することで作成される。ところで、レーザセンサ1は、一般的に温度によって計測結果にドリフトが生じることがある。そのため、記憶部22が記憶している路面高テーブルの値は、更新部26により温度ドリフトの影響によるオフセットを含む値に更新される。
【0021】
路面高特定部23は、記憶部22が記憶する路面高情報に基づいて、センサ情報取得部21が取得した反射点に対応する路面高を読み出し、当該路面高を対象物判定部24に出力する。また、路面高特定部23は、対象物判定部24による判定の後、路面高情報と車輪位置特定部28によって車輪位置とに基づいて車両が存在する点に対応する路面高を特定し、当該路面高を高さ算出部29に出力する。
【0022】
対象物判定部24は、反射点毎に、センサ情報取得部21が取得した計測距離と路面高特定部23から取得した路面高との差が所定の閾値以下であるか否かを判定することで、反射点に高さの計測対象となる対象物が存在するか否かを判定する。
路面状態判定部25は、センサ情報取得部21が取得した計測距離を取得し、対象物判定部24によって対象物が存在しないと判定された反射点の距離の散布度に基づいて、路面の状態の良否を判定する。
更新部26は、路面状態判定部25によって路面の状態が良いと判定された場合に、対象物が存在しないと判定された反射点それぞれにおける計測距離と路面高の差に基づいて、記憶部22が記憶する路面高テーブルを更新する。
【0023】
車両判定部27は、対象物判定部24によって対象物が存在すると判定された反射点に車両が存在するか否かを判定する。
車輪位置特定部28は、車両判定部27により車両が存在すると判定された場合に、その車輪の位置を特定する。
高さ算出部29は、反射点毎に、センサ情報取得部21が取得した計測距離と路面高特定部23が特定した路面高との差を算出することで、対象物の高さを算出する。
【0024】
次に、本実施形態においてレーザセンサ1は、所定の時間間隔でレーザ光の走査を行い、計測装置にその計測結果として、反射点毎に、当該反射点の路面幅方向の位置を示す座標及び計測距離を出力する。以下、レーザセンサ1から計測結果を受け付ける度に実行される情報処理装置2の動作について説明する。
【0025】
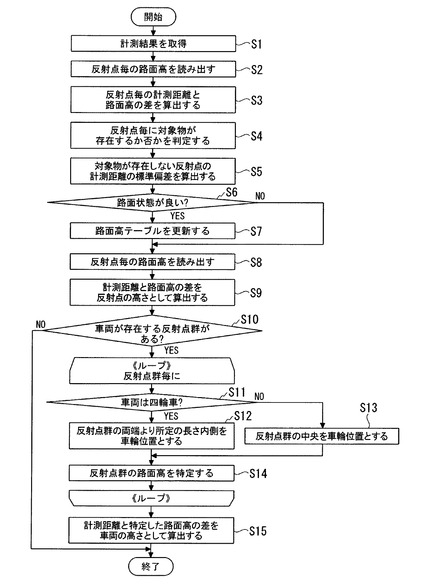
図4は、本実施形態における情報処理装置2の動作を示すフローチャートである。
レーザセンサ1から計測結果が出力されると、センサ情報取得部21は、当該計測結果を取得する(ステップS1)。次に、センサ情報取得部21は、取得した計測結果を対象物判定部24に出力する。また、センサ情報取得部21は、取得した計測結果のうち、反射点の座標を路面高特定部23に出力する。
【0026】
次に、路面高特定部23は、記憶部22が記憶する路面高テーブルを参照して、センサ情報取得部21から取得した各反射点の座標に対応する路面高を読み出し、対象物判定部24に出力する(ステップS2)。このとき、路面高特定部23は、反射点の座標に対応する路面高として、反射点の座標に最も近い区分点(図3を参照)に関連付けられた路面高を出力する。
【0027】
次に、対象物判定部24は、反射点毎に、センサ情報取得部21から取得した計測距離と、路面高特定部23から取得した路面高との差を算出する(ステップS3)。次に、対象物判定部24は、算出した差に基づいて、反射点毎に、当該反射点に対象物が存在するか否かを判定する(ステップS4)。具体的には、対象物判定部24は、算出した差が所定の閾値(例えば、1メートル)以上となる反射点に対象物が存在すると判定し、差が所定の閾値未満となる反射点に対象物が存在しないと判定する。なお、反射点に対象物が存在しない場合、レーザセンサ1によって射出されたレーザ光は路面で反射しており、反射点は路面上の点である。
【0028】
次に、路面状態判定部25は、センサ情報取得部21がステップS1で取得した計測結果のうち、対象物判定部24により対象物が存在しないと判定された反射点における距離を取得する。次に、路面状態判定部25は、直近の所定回数の計測において連続して対象物が存在しないと判定された反射点における計測距離の標準偏差を算出する(ステップS5)。次に、路面状態判定部25は、算出した標準偏差が所定の閾値以上であるか否かを判定することにより、路面状態の良否を判定する(ステップS6)。具体的には、路面状態判定部25は、算出した標準偏差が所定の閾値以上である場合に、路面状態が悪いと判定する。これは、雨天などにより路面が濡れると、レーザセンサ1が照射したレーザが乱反射するため、計測距離のばらつきが大きくなる。つまり路面状態が悪いときは、レーザセンサ1による計測結果の信頼度が低くなる。
【0029】
路面状態判定部25が、路面状態が良いと判定した場合(ステップS6:YES)、更新部26は、対象物判定部24がステップS3で算出した差のうち、対象物が存在しないと判定された反射点に関連付けられたものを取得する。次に、更新部26は、取得した差の値に基づいて、記憶部22が記憶する路面高テーブルを更新する(ステップS7)。路面高テーブルの更新方法としては、例えば、取得した差の値の平均値を算出し、路面高テーブルの各路面高に当該平均値を加算する方法が挙げられる。その他、反射点と取得した差の値との関係からレーザセンサ1における温度ドラフトの影響を示す関数を導出し、当該関数に基づいて路面高テーブルの各路面高に温度ドラフトの影響を加算する方法を用いても良い。
【0030】
ステップS6で路面状態判定部25が、路面状態が悪いと判定した場合(ステップS6:NO)、またはステップS7で更新部26が路面高テーブルを更新した場合、路面高特定部23は、記憶部22が記憶する路面高テーブルから、反射点毎の路面高を読み出す(ステップS8)。なお、ここで路面高特定部23が読み出す路面高は、ステップS6において路面状態が良いと判定された場合、ステップS7で更新された路面高テーブルの路面高となる。次に、高さ算出部29は、路面高特定部23が読み出した路面高からステップS1でセンサ情報取得部21が取得した計測距離を減算することで、各反射点の高さを算出する(ステップS9)。
【0031】
次に、車両判定部27は、対象物判定部24によって対象物が存在すると判定された反射点毎に、当該反射点に車両が存在するか否かを判定する(ステップS10)。具体的には、車両判定部27は、対象物判定部24によって対象物が存在すると判定された反射点が所定の幅(例えば40センチメートル)に亘って連続して存在する場合に、当該連続する反射点群の位置に車両が存在すると判定する。車両判定部27が、車両が存在する反射点群がないと判定した場合(ステップS10:NO)、情報処理装置2は、ステップS9で算出した反射点の高さを路面上の対象物の高さとして出力し、処理を終了する。
【0032】
車両判定部27は、車両が存在する反射点群があると判定した場合(ステップS10:YES)、当該反射点群のそれぞれに対して、車両が四輪車であるか否かを判定する(ステップS11)。具体的には、車両判定部27は、車両の幅が所定の幅(例えば70センチメートル)以上である場合に、当該車両が四輪車であると判定し、そうでない場合に当該車両が二輪車であると判定する。
【0033】
車両判定部27は、車両が四輪車であると判定した場合(ステップS11:YES)、車輪位置特定部28は、車両判定部27によって四輪車が存在すると判定された反射点群の両端より所定の長さ(例えば10センチメートル)だけ内側のそれぞれの点が当該四輪車の車輪の位置であると特定する(ステップS12)。
他方、車両判定部27は、車両が二輪車であると判定した場合(ステップS11:NO)、車輪位置特定部28は、車両判定部27によって二輪車が存在すると判定された反射点群の中央の点が当該二輪車の車輪の位置であると特定する(ステップS13)。
【0034】
ステップS12またはステップS13で車輪位置特定部28が車輪位置を特定すると、路面高特定部23は、ステップS8で読み出した路面高のうち特定した車輪位置に対応する路面高に基づいて、車両判定部27によって車両が存在すると判定された反射点群に対応する路面高を特定する(ステップS14)。具体的には、車両が四輪車である場合、ステップS12で車輪位置が2点特定されているので、車輪位置に対応する2つの路面高の線形補完によって、反射点群に対応する路面高を算出する。他方、車両が二輪車である場合、ステップS13で車輪位置が1点特定されているので、車輪位置に対応する路面高を、反射点群に対応する路面高とする。
【0035】
ここでステップS14による路面高の特定を行う理由を説明する。
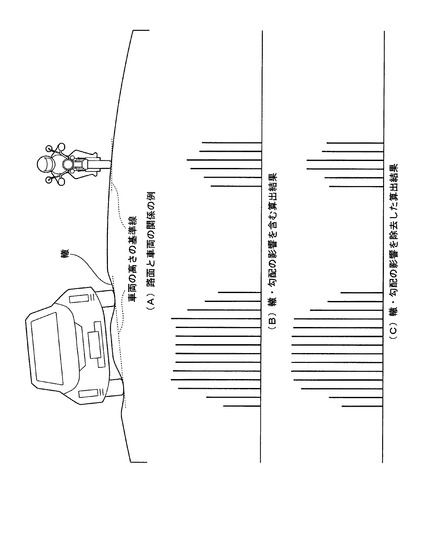
図5は、路面を走行する車両の例を示す図である。
図5(A)に示すように、車両の通行により路面には轍が形成されることがある。このとき、図5(A)に示すように轍の上に四輪車が存在する場合、記憶部22が記憶する路面高テーブルにのみ基づいて車両の高さを算出しようとすると、図5(B)に示すように、車両の高さの算出結果が轍による凹凸の影響を含むこととなる。他方、ステップS14の処理によって路面高を特定した場合、図5(C)に示すように車両の高さの算出結果から轍の影響を除去することができる。
また、二輪車は、車輪が1つであるため、姿勢が勾配に依らない。そのため、記憶部22が記憶する路面高テーブルにのみ基づいて車両の高さを算出しようとすると、図5(B)に示すように、車両の高さの算出結果が勾配の影響を含むこととなる。他方、ステップS14の処理によって路面高を特定した場合、図5(C)に示すように車両の高さの算出結果から勾配の影響を除去することができる。
【0036】
ステップS14で路面高特定部23が路面高を特定すると、高さ算出部29は、路面高特定部23が特定した路面高からステップS1でセンサ情報取得部21が取得した計測距離を減算することで、車両の高さを算出し(ステップS15)、車両が存在する反射点の高さをステップS15で算出した車両の高さに置換する。これにより、レーザの反射点ごとの対象物の高さを算出することができる。
【0037】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、本実施形態では、レーザセンサ1が、設置位置と同じ高さの位置であって、反射点の直上の位置である基準位置から反射点までの距離を出力する場合、つまりレーザセンサの出力が直交座標系の値を示す場合について説明したが、これに限られない。例えば、レーザセンサ1が、設置位置から所定の走査角でレーザを照射したときの反射点までの距離との関係を出力するもの、つまり極座標系の値を示すものであっても、同様の処理を行うことができる。この場合、基準位置は設置位置であり、路面高テーブルは、走査角と路面高との関係を格納する必要がある。
【0038】
また、本実施形態では、距離計測部として走査式のレーザセンサ1を用いる場合について説明したが、これに限られず、多光軸式など他のセンシング方式によるレーザセンサを用いても良い。
【0039】
また、本実施形態では、路面高特定部23が、反射点の座標に対応する路面高として、反射点の座標に最も近い区分点に関連付けられた路面高を出力する場合について説明したが、これに限られない。例えば、路面高特定部23は、反射点の座標に対応する路面高を、反射点の座標の近傍の2つの区分点に関連付けられた路面高の補間計算によって求めても良い。
【0040】
また、本実施形態では、記憶部22が路面上の点と、前記基準位置から当該点までの距離である路面高との関係を路面高テーブルとして記憶する場合を説明したが、これに限られない。例えば、路面に轍が存在しない場合や轍が無視できるほど小さい場合には、記憶部22が路面上の点と、前記基準位置から当該点までの距離である路面高との関係を表現した関数を、路面高情報として記憶していても良い。
【0041】
また、本実施形態では、路面状態判定部25が、連続して対象物が存在しない反射点の時間毎の計測情報の標準偏差に基づいて路面状態の良否を判定する場合を説明したが、これに限られない。例えば、分散の大きさや最大値と最小値の差に基づく範囲など、他の散布度を示す値に基づいて路面状態の良否を判定しても良い。また、時間毎の計測情報の標準偏差ではなく、ある時刻において対象物が存在しない複数の反射点の散布度に基づいて路面状態の良否を判定しても良い。
【0042】
また、本実施形態では、路面状態判定部25が、計測情報の散布度に基づいて路面状態の良否を判定する場合を説明したが、これに限られない。例えば、降雨センサなどを備え、当該降雨センサが降雨を検知した場合に、路面状態判定部25が路面状態が悪いと判定するようにしても良い。
【0043】
また、本実施形態ではステップS8、ステップS9で先に各反射点の高さを算出した後で、ステップS10〜ステップS15の処理によって路面高の差を上書きする場合を説明したが、これに限られない。例えば、ステップS10〜ステップS15の処理を先に実行した後で、ステップS8、ステップS9と同様の手順により車両が存在しない反射点の高さを算出するようにしても良い。
【0044】
また、本実施形態では、全ての反射点の高さを算出することで、対象物と路面とを含む高さの算出を行う場合を説明したが、これに限られない。例えば、計測装置は、単に車両の高さのみを算出しても良い。この場合、ステップS8、ステップS9の処理を飛ばして、ステップS10〜ステップS15の処理を行うことで、車両の高さのみを算出しても良い。
【0045】
上述の情報処理装置2は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0046】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0047】
1…レーザセンサ 2…情報処理装置 21…センサ情報取得部 22…記憶部 23…路面高特定部 24…対象物判定部 25…路面状態判定部 26…更新部 27…車両判定部 28…車輪位置特定部 29…高さ算出部
【技術分野】
【0001】
本発明は、路面上に存在する対象物の高さを計測する計測装置、計測方法、及びプログラムに関する。
【背景技術】
【0002】
有料道路等の通路におけるロードプライシングにおいて、徴収する料金は車種毎に異なる。そのため、通路に設けられる路側装置は、車種を判別するために車両の高さを計測する必要がある。車両の高さの計測には、例えばレーザセンサを用いた計測方法が用いられる。
【0003】
レーザにより車高を計測する方法として、路面上方に設けられたレーザセンサが路面に向けてレーザを走査し、走査されたレーザの反射光の強度や、レーザの照射から反射光の受光までの時間を計測する方法がある(例えば、特許文献1を参照)。具体的には、レーザセンサの設置高さから、レーザセンサから車両までの長さを減算することで、車高の算出を行っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−8188号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、路面には雨水などを路側へ流すための水勾配が設けられたり、車両の通行により轍が形成されたりするため、必ずしも路面が平坦であるとは限らない。そのため、レーザセンサの設置高さは路面上の点毎に異なる可能性があり、上述した方法を用いた場合、正確に車高を算出することができないおそれがある。
本発明は、上記の問題に鑑みてなされたものであり、平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明は上記の課題を解決するためになされたものであり、路面上に存在する対象物の高さを計測する計測装置であって、路面上方の基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測する距離計測部と、路面上の点と、前記基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部と、前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定する路面高特定部と、前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する高さ算出部とを備えることを特徴とする。
【0007】
また、本発明においては、前記反射点毎に、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であるか否かを判定する対象物判定部と、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であると判定された反射点が存在する場合に、当該反射点の路面高に基づいて前記記憶部が記憶する路面高情報を更新する更新部と、を備え、前記高さ算出部は、前記更新部によって路面高情報が更新された後に前記路面高特定部が特定した路面高を用いて路面から前記反射点までの長さを算出することが好ましい。
【0008】
また、本発明においては、路面状態の良否を判定する路面状態判定部を備え、前記更新部は、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であると判定された反射点が存在し、かつ前記路面状態判定部が路面状態が良いと判定した場合にのみ、前記反射点の路面高に基づいて前記記憶部が記憶する路面高情報を更新することが好ましい。
【0009】
また、本発明においては、前記路面状態判定部は、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した距離との差が所定の閾値以下であると判定された反射点が存在する場合において、当該反射点それぞれにおいて反射された反射光の強度の散布度が所定値以下のときに、路面状態が良いと判定することが好ましい。
【0010】
また、本発明においては、前記反射点に車両が存在するか否かを判定する車両判定部と、前記車両判定部によって車両が存在すると判定された場合に、当該車両の車輪が存在する位置を特定する車輪位置特定部とを備え、前記路面高特定部は、前記車輪位置特定部によって特定された車輪位置に基づいて、前記車両が存在する点の路面高を特定することが好ましい。
【0011】
また、本発明においては、前記車両判定部は、前記反射点のうち、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した距離との差が所定の閾値を超えると判定された反射点が所定の幅に亘って連続して存在する場合に、当該連続する反射点の位置に車両が存在すると判定することが好ましい。
【0012】
また、本発明は、路面上の点と、路面上方の基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部を備え、路面上に存在する対象物の高さを計測する計測装置を用いた計測方法であって、距離計測部は、前記基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測し、路面高特定部は、前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定し、高さ算出部は、前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出することを特徴とする。
【0013】
また、本発明は、路面上の点と、路面上方の基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部を備え、路面上に存在する対象物の高さを計測する計測装置を、前記基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測する距離計測部、前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定する路面高特定部、前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する高さ算出部として機能させるためのプログラムである。
【発明の効果】
【0014】
本発明によれば、計測装置は、記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定し、当該路面高を用いて対象物の高さを算出する。これにより、計測装置は、平坦でない路面上に存在する対象物の高さを正確に計算することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態による計測装置の構成図である。
【図2】情報処理装置の構成を示す概略ブロック図である。
【図3】記憶部が記憶する路面高テーブルの例を示す図である。
【図4】本実施形態における情報処理装置の動作を示すフローチャートである。
【図5】路面を走行する車両の例を示す図である。
【発明を実施するための形態】
【0016】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
図1は、本発明の一実施形態による計測装置の構成図である。
計測装置は、レーザセンサ1(距離計測部)と情報処理装置2とを備える。
【0017】
レーザセンサ1は、カンチレバーやガントリを介して路面上方に設置され、当該設置位置から路面に向けてレーザを走査させる。レーザセンサ1は、路面に向けてレーザを走査させることで、路面上の複数の点へ向けてレーザを射出する。また、レーザセンサ1は、走査させたレーザの反射光に基づいて、所定の基準位置から当該レーザが反射された点である反射点までの距離(計測距離)を計測する。本実施形態において基準位置とは、レーザセンサ1の設置位置と同じ高さの位置であって、反射点の直上の位置のことである。つまり本実施形態において計測距離とは、レーザセンサ1の設置位置の高さと反射点の高さとの差と等価である。なお、レーザセンサ1が出力する反射点と計測距離との関係の例としては、レーザセンサの原点からの走査角θと、当該走査角θにおける反射点までの直線距離Lとで示される極座標系の関係や、レーザセンサ1の設置位置を原点とする水平方向の位置Xと、当該位置Xから反射点までの垂直方向の距離Yとで示される直交座標系の関係などが挙げられる。なお、レーザセンサ1が直交座標系の関係を出力する場合、レーザセンサ1が走査角θと直線距離Lとを用いて、X=Lsinθ、Y=Lcosθを算出することで、位置Xと距離Yの関係を出力することとなる。
情報処理装置2は、レーザセンサ1が計測した距離に基づいて、路面上に存在する車両(対象物)の高さを算出する。
【0018】
図2は、情報処理装置2の構成を示す概略ブロック図である。
情報処理装置2は、センサ情報取得部21、記憶部22、路面高特定部23、対象物判定部24、路面状態判定部25、更新部26、車両判定部27、車輪位置特定部28、高さ算出部29を備える。
【0019】
センサ情報取得部21は、レーザセンサ1から反射点毎に、当該反射点の路面幅方向の位置を示す座標(例えば、路側からの距離)に関連付けて計測距離を取得する。
【0020】
図3は、記憶部22が記憶する路面高テーブルの例を示す図である。
記憶部22は、路面上の点と、当該点に対応する基準位置から当該点までの距離である路面高とを関連付けて格納する路面高テーブル(路面高情報)を記憶する。路面高テーブルの例としては、図3に示すように、路面を幅方向に10センチメートルごとに区分したときの区分点に関連付けて、当該区分点毎の高さを格納するものが挙げられる。
当該路面高テーブルは、予め対象物が存在しないときの路面高をレーザセンサ1により計測しておき、当該計測値を路面上の点に関連付けて記録することで作成される。ところで、レーザセンサ1は、一般的に温度によって計測結果にドリフトが生じることがある。そのため、記憶部22が記憶している路面高テーブルの値は、更新部26により温度ドリフトの影響によるオフセットを含む値に更新される。
【0021】
路面高特定部23は、記憶部22が記憶する路面高情報に基づいて、センサ情報取得部21が取得した反射点に対応する路面高を読み出し、当該路面高を対象物判定部24に出力する。また、路面高特定部23は、対象物判定部24による判定の後、路面高情報と車輪位置特定部28によって車輪位置とに基づいて車両が存在する点に対応する路面高を特定し、当該路面高を高さ算出部29に出力する。
【0022】
対象物判定部24は、反射点毎に、センサ情報取得部21が取得した計測距離と路面高特定部23から取得した路面高との差が所定の閾値以下であるか否かを判定することで、反射点に高さの計測対象となる対象物が存在するか否かを判定する。
路面状態判定部25は、センサ情報取得部21が取得した計測距離を取得し、対象物判定部24によって対象物が存在しないと判定された反射点の距離の散布度に基づいて、路面の状態の良否を判定する。
更新部26は、路面状態判定部25によって路面の状態が良いと判定された場合に、対象物が存在しないと判定された反射点それぞれにおける計測距離と路面高の差に基づいて、記憶部22が記憶する路面高テーブルを更新する。
【0023】
車両判定部27は、対象物判定部24によって対象物が存在すると判定された反射点に車両が存在するか否かを判定する。
車輪位置特定部28は、車両判定部27により車両が存在すると判定された場合に、その車輪の位置を特定する。
高さ算出部29は、反射点毎に、センサ情報取得部21が取得した計測距離と路面高特定部23が特定した路面高との差を算出することで、対象物の高さを算出する。
【0024】
次に、本実施形態においてレーザセンサ1は、所定の時間間隔でレーザ光の走査を行い、計測装置にその計測結果として、反射点毎に、当該反射点の路面幅方向の位置を示す座標及び計測距離を出力する。以下、レーザセンサ1から計測結果を受け付ける度に実行される情報処理装置2の動作について説明する。
【0025】
図4は、本実施形態における情報処理装置2の動作を示すフローチャートである。
レーザセンサ1から計測結果が出力されると、センサ情報取得部21は、当該計測結果を取得する(ステップS1)。次に、センサ情報取得部21は、取得した計測結果を対象物判定部24に出力する。また、センサ情報取得部21は、取得した計測結果のうち、反射点の座標を路面高特定部23に出力する。
【0026】
次に、路面高特定部23は、記憶部22が記憶する路面高テーブルを参照して、センサ情報取得部21から取得した各反射点の座標に対応する路面高を読み出し、対象物判定部24に出力する(ステップS2)。このとき、路面高特定部23は、反射点の座標に対応する路面高として、反射点の座標に最も近い区分点(図3を参照)に関連付けられた路面高を出力する。
【0027】
次に、対象物判定部24は、反射点毎に、センサ情報取得部21から取得した計測距離と、路面高特定部23から取得した路面高との差を算出する(ステップS3)。次に、対象物判定部24は、算出した差に基づいて、反射点毎に、当該反射点に対象物が存在するか否かを判定する(ステップS4)。具体的には、対象物判定部24は、算出した差が所定の閾値(例えば、1メートル)以上となる反射点に対象物が存在すると判定し、差が所定の閾値未満となる反射点に対象物が存在しないと判定する。なお、反射点に対象物が存在しない場合、レーザセンサ1によって射出されたレーザ光は路面で反射しており、反射点は路面上の点である。
【0028】
次に、路面状態判定部25は、センサ情報取得部21がステップS1で取得した計測結果のうち、対象物判定部24により対象物が存在しないと判定された反射点における距離を取得する。次に、路面状態判定部25は、直近の所定回数の計測において連続して対象物が存在しないと判定された反射点における計測距離の標準偏差を算出する(ステップS5)。次に、路面状態判定部25は、算出した標準偏差が所定の閾値以上であるか否かを判定することにより、路面状態の良否を判定する(ステップS6)。具体的には、路面状態判定部25は、算出した標準偏差が所定の閾値以上である場合に、路面状態が悪いと判定する。これは、雨天などにより路面が濡れると、レーザセンサ1が照射したレーザが乱反射するため、計測距離のばらつきが大きくなる。つまり路面状態が悪いときは、レーザセンサ1による計測結果の信頼度が低くなる。
【0029】
路面状態判定部25が、路面状態が良いと判定した場合(ステップS6:YES)、更新部26は、対象物判定部24がステップS3で算出した差のうち、対象物が存在しないと判定された反射点に関連付けられたものを取得する。次に、更新部26は、取得した差の値に基づいて、記憶部22が記憶する路面高テーブルを更新する(ステップS7)。路面高テーブルの更新方法としては、例えば、取得した差の値の平均値を算出し、路面高テーブルの各路面高に当該平均値を加算する方法が挙げられる。その他、反射点と取得した差の値との関係からレーザセンサ1における温度ドラフトの影響を示す関数を導出し、当該関数に基づいて路面高テーブルの各路面高に温度ドラフトの影響を加算する方法を用いても良い。
【0030】
ステップS6で路面状態判定部25が、路面状態が悪いと判定した場合(ステップS6:NO)、またはステップS7で更新部26が路面高テーブルを更新した場合、路面高特定部23は、記憶部22が記憶する路面高テーブルから、反射点毎の路面高を読み出す(ステップS8)。なお、ここで路面高特定部23が読み出す路面高は、ステップS6において路面状態が良いと判定された場合、ステップS7で更新された路面高テーブルの路面高となる。次に、高さ算出部29は、路面高特定部23が読み出した路面高からステップS1でセンサ情報取得部21が取得した計測距離を減算することで、各反射点の高さを算出する(ステップS9)。
【0031】
次に、車両判定部27は、対象物判定部24によって対象物が存在すると判定された反射点毎に、当該反射点に車両が存在するか否かを判定する(ステップS10)。具体的には、車両判定部27は、対象物判定部24によって対象物が存在すると判定された反射点が所定の幅(例えば40センチメートル)に亘って連続して存在する場合に、当該連続する反射点群の位置に車両が存在すると判定する。車両判定部27が、車両が存在する反射点群がないと判定した場合(ステップS10:NO)、情報処理装置2は、ステップS9で算出した反射点の高さを路面上の対象物の高さとして出力し、処理を終了する。
【0032】
車両判定部27は、車両が存在する反射点群があると判定した場合(ステップS10:YES)、当該反射点群のそれぞれに対して、車両が四輪車であるか否かを判定する(ステップS11)。具体的には、車両判定部27は、車両の幅が所定の幅(例えば70センチメートル)以上である場合に、当該車両が四輪車であると判定し、そうでない場合に当該車両が二輪車であると判定する。
【0033】
車両判定部27は、車両が四輪車であると判定した場合(ステップS11:YES)、車輪位置特定部28は、車両判定部27によって四輪車が存在すると判定された反射点群の両端より所定の長さ(例えば10センチメートル)だけ内側のそれぞれの点が当該四輪車の車輪の位置であると特定する(ステップS12)。
他方、車両判定部27は、車両が二輪車であると判定した場合(ステップS11:NO)、車輪位置特定部28は、車両判定部27によって二輪車が存在すると判定された反射点群の中央の点が当該二輪車の車輪の位置であると特定する(ステップS13)。
【0034】
ステップS12またはステップS13で車輪位置特定部28が車輪位置を特定すると、路面高特定部23は、ステップS8で読み出した路面高のうち特定した車輪位置に対応する路面高に基づいて、車両判定部27によって車両が存在すると判定された反射点群に対応する路面高を特定する(ステップS14)。具体的には、車両が四輪車である場合、ステップS12で車輪位置が2点特定されているので、車輪位置に対応する2つの路面高の線形補完によって、反射点群に対応する路面高を算出する。他方、車両が二輪車である場合、ステップS13で車輪位置が1点特定されているので、車輪位置に対応する路面高を、反射点群に対応する路面高とする。
【0035】
ここでステップS14による路面高の特定を行う理由を説明する。
図5は、路面を走行する車両の例を示す図である。
図5(A)に示すように、車両の通行により路面には轍が形成されることがある。このとき、図5(A)に示すように轍の上に四輪車が存在する場合、記憶部22が記憶する路面高テーブルにのみ基づいて車両の高さを算出しようとすると、図5(B)に示すように、車両の高さの算出結果が轍による凹凸の影響を含むこととなる。他方、ステップS14の処理によって路面高を特定した場合、図5(C)に示すように車両の高さの算出結果から轍の影響を除去することができる。
また、二輪車は、車輪が1つであるため、姿勢が勾配に依らない。そのため、記憶部22が記憶する路面高テーブルにのみ基づいて車両の高さを算出しようとすると、図5(B)に示すように、車両の高さの算出結果が勾配の影響を含むこととなる。他方、ステップS14の処理によって路面高を特定した場合、図5(C)に示すように車両の高さの算出結果から勾配の影響を除去することができる。
【0036】
ステップS14で路面高特定部23が路面高を特定すると、高さ算出部29は、路面高特定部23が特定した路面高からステップS1でセンサ情報取得部21が取得した計測距離を減算することで、車両の高さを算出し(ステップS15)、車両が存在する反射点の高さをステップS15で算出した車両の高さに置換する。これにより、レーザの反射点ごとの対象物の高さを算出することができる。
【0037】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、本実施形態では、レーザセンサ1が、設置位置と同じ高さの位置であって、反射点の直上の位置である基準位置から反射点までの距離を出力する場合、つまりレーザセンサの出力が直交座標系の値を示す場合について説明したが、これに限られない。例えば、レーザセンサ1が、設置位置から所定の走査角でレーザを照射したときの反射点までの距離との関係を出力するもの、つまり極座標系の値を示すものであっても、同様の処理を行うことができる。この場合、基準位置は設置位置であり、路面高テーブルは、走査角と路面高との関係を格納する必要がある。
【0038】
また、本実施形態では、距離計測部として走査式のレーザセンサ1を用いる場合について説明したが、これに限られず、多光軸式など他のセンシング方式によるレーザセンサを用いても良い。
【0039】
また、本実施形態では、路面高特定部23が、反射点の座標に対応する路面高として、反射点の座標に最も近い区分点に関連付けられた路面高を出力する場合について説明したが、これに限られない。例えば、路面高特定部23は、反射点の座標に対応する路面高を、反射点の座標の近傍の2つの区分点に関連付けられた路面高の補間計算によって求めても良い。
【0040】
また、本実施形態では、記憶部22が路面上の点と、前記基準位置から当該点までの距離である路面高との関係を路面高テーブルとして記憶する場合を説明したが、これに限られない。例えば、路面に轍が存在しない場合や轍が無視できるほど小さい場合には、記憶部22が路面上の点と、前記基準位置から当該点までの距離である路面高との関係を表現した関数を、路面高情報として記憶していても良い。
【0041】
また、本実施形態では、路面状態判定部25が、連続して対象物が存在しない反射点の時間毎の計測情報の標準偏差に基づいて路面状態の良否を判定する場合を説明したが、これに限られない。例えば、分散の大きさや最大値と最小値の差に基づく範囲など、他の散布度を示す値に基づいて路面状態の良否を判定しても良い。また、時間毎の計測情報の標準偏差ではなく、ある時刻において対象物が存在しない複数の反射点の散布度に基づいて路面状態の良否を判定しても良い。
【0042】
また、本実施形態では、路面状態判定部25が、計測情報の散布度に基づいて路面状態の良否を判定する場合を説明したが、これに限られない。例えば、降雨センサなどを備え、当該降雨センサが降雨を検知した場合に、路面状態判定部25が路面状態が悪いと判定するようにしても良い。
【0043】
また、本実施形態ではステップS8、ステップS9で先に各反射点の高さを算出した後で、ステップS10〜ステップS15の処理によって路面高の差を上書きする場合を説明したが、これに限られない。例えば、ステップS10〜ステップS15の処理を先に実行した後で、ステップS8、ステップS9と同様の手順により車両が存在しない反射点の高さを算出するようにしても良い。
【0044】
また、本実施形態では、全ての反射点の高さを算出することで、対象物と路面とを含む高さの算出を行う場合を説明したが、これに限られない。例えば、計測装置は、単に車両の高さのみを算出しても良い。この場合、ステップS8、ステップS9の処理を飛ばして、ステップS10〜ステップS15の処理を行うことで、車両の高さのみを算出しても良い。
【0045】
上述の情報処理装置2は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0046】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0047】
1…レーザセンサ 2…情報処理装置 21…センサ情報取得部 22…記憶部 23…路面高特定部 24…対象物判定部 25…路面状態判定部 26…更新部 27…車両判定部 28…車輪位置特定部 29…高さ算出部
【特許請求の範囲】
【請求項1】
路面上に存在する対象物の高さを計測する計測装置であって、
路面上方の基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測する距離計測部と、
路面上の点と、前記基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部と、
前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定する路面高特定部と、
前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する高さ算出部と
を備えることを特徴とする計測装置。
【請求項2】
前記反射点毎に、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であるか否かを判定する対象物判定部と、
前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であると判定された反射点が存在する場合に、当該反射点の路面高に基づいて前記記憶部が記憶する路面高情報を更新する更新部と
を備えることを特徴とする請求項1に記載の計測装置。
【請求項3】
路面状態の良否を判定する路面状態判定部を備え、
前記更新部は、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であると判定された反射点が存在し、かつ前記路面状態判定部が路面状態が良いと判定した場合にのみ、前記反射点の路面高に基づいて前記記憶部が記憶する路面高情報を更新する
ことを特徴とする請求項2に記載の計測装置。
【請求項4】
前記路面状態判定部は、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した距離との差が所定の閾値以下であると判定された反射点が存在する場合において、当該反射点それぞれにおいて距離計測部によって計測された距離の散布度が所定値以下のときに、路面状態が良いと判定する
ことを特徴とする請求項3に記載の計測装置。
【請求項5】
前記反射点に車両が存在するか否かを判定する車両判定部と、
前記車両判定部によって車両が存在すると判定された場合に、当該車両の車輪が存在する位置を特定する車輪位置特定部と
を備え、
前記路面高特定部は、前記車輪位置特定部によって特定された車輪位置に基づいて、前記車両が存在する点の路面高を特定する
ことを特徴とする請求項1から請求項4の何れか1項に記載の計測装置。
【請求項6】
前記車両判定部は、前記反射点のうち、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した距離との差が所定の閾値を超えると判定された反射点が所定の幅に亘って連続して存在する場合に、当該連続する反射点の位置に車両が存在すると判定する
ことを特徴とする請求項5に記載の計測装置。
【請求項7】
路面上の点と、路面上方の基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部を備え、路面上に存在する対象物の高さを計測する計測装置を用いた計測方法であって、
距離計測部は、前記基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測し、
路面高特定部は、前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定し、
高さ算出部は、前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する
ことを特徴とする計測方法。
【請求項8】
路面上の点と、路面上方の基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部を備え、路面上に存在する対象物の高さを計測する計測装置を、
前記基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測する距離計測部、
前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定する路面高特定部、
前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する高さ算出部
として機能させるためのプログラム。
【請求項1】
路面上に存在する対象物の高さを計測する計測装置であって、
路面上方の基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測する距離計測部と、
路面上の点と、前記基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部と、
前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定する路面高特定部と、
前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する高さ算出部と
を備えることを特徴とする計測装置。
【請求項2】
前記反射点毎に、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であるか否かを判定する対象物判定部と、
前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であると判定された反射点が存在する場合に、当該反射点の路面高に基づいて前記記憶部が記憶する路面高情報を更新する更新部と
を備えることを特徴とする請求項1に記載の計測装置。
【請求項3】
路面状態の良否を判定する路面状態判定部を備え、
前記更新部は、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した路面高との差が所定の閾値以下であると判定された反射点が存在し、かつ前記路面状態判定部が路面状態が良いと判定した場合にのみ、前記反射点の路面高に基づいて前記記憶部が記憶する路面高情報を更新する
ことを特徴とする請求項2に記載の計測装置。
【請求項4】
前記路面状態判定部は、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した距離との差が所定の閾値以下であると判定された反射点が存在する場合において、当該反射点それぞれにおいて距離計測部によって計測された距離の散布度が所定値以下のときに、路面状態が良いと判定する
ことを特徴とする請求項3に記載の計測装置。
【請求項5】
前記反射点に車両が存在するか否かを判定する車両判定部と、
前記車両判定部によって車両が存在すると判定された場合に、当該車両の車輪が存在する位置を特定する車輪位置特定部と
を備え、
前記路面高特定部は、前記車輪位置特定部によって特定された車輪位置に基づいて、前記車両が存在する点の路面高を特定する
ことを特徴とする請求項1から請求項4の何れか1項に記載の計測装置。
【請求項6】
前記車両判定部は、前記反射点のうち、前記対象物判定部によって、前記距離計測部が計測した距離と前記路面高特定部が特定した距離との差が所定の閾値を超えると判定された反射点が所定の幅に亘って連続して存在する場合に、当該連続する反射点の位置に車両が存在すると判定する
ことを特徴とする請求項5に記載の計測装置。
【請求項7】
路面上の点と、路面上方の基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部を備え、路面上に存在する対象物の高さを計測する計測装置を用いた計測方法であって、
距離計測部は、前記基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測し、
路面高特定部は、前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定し、
高さ算出部は、前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する
ことを特徴とする計測方法。
【請求項8】
路面上の点と、路面上方の基準位置から当該点までの距離である路面高との関係を示す路面高情報を記憶する記憶部を備え、路面上に存在する対象物の高さを計測する計測装置を、
前記基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、前記基準位置から当該レーザが反射された点である反射点までの距離を計測する距離計測部、
前記記憶部が記憶する路面高情報に基づいて前記反射点それぞれにおける路面高を特定する路面高特定部、
前記距離計測部が算出したそれぞれの距離と前記路面高特定部が特定した路面高とに基づいて、路面から前記反射点までの長さを前記対象物の高さとして算出する高さ算出部
として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−40872(P2013−40872A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−178875(P2011−178875)
【出願日】平成23年8月18日(2011.8.18)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月18日(2011.8.18)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]