
計測装置、露光装置及びデバイスの製造方法
【課題】光源からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる技術を提供する。
【解決手段】計測面の表面形状を計測する計測装置であって、光源からの光を計測光と参照光とに分離し、計測光を被計測面の表面に入射させ、参照光を参照面に入射させる光学系と、被計測面の表面で反射した計測光の光強度と、参照面で反射した参照光の光強度と、被計測面の表面で反射した計測光と参照面で反射した参照光との干渉パターンとを検出する検出部と、検出部によって検出された干渉パターンの干渉信号に基づいて、被計測面の表面形状を算出する処理部と、を有し、処理部は、検出部によって検出された計測光の光強度、及び、参照光の光強度に基づいて、検出部によって検出された干渉パターンの干渉信号に含まれる光源からの光の光量ばらつきによる影響を低減して、被計測面の表面形状を算出する。
【解決手段】計測面の表面形状を計測する計測装置であって、光源からの光を計測光と参照光とに分離し、計測光を被計測面の表面に入射させ、参照光を参照面に入射させる光学系と、被計測面の表面で反射した計測光の光強度と、参照面で反射した参照光の光強度と、被計測面の表面で反射した計測光と参照面で反射した参照光との干渉パターンとを検出する検出部と、検出部によって検出された干渉パターンの干渉信号に基づいて、被計測面の表面形状を算出する処理部と、を有し、処理部は、検出部によって検出された計測光の光強度、及び、参照光の光強度に基づいて、検出部によって検出された干渉パターンの干渉信号に含まれる光源からの光の光量ばらつきによる影響を低減して、被計測面の表面形状を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、計測装置、露光装置及びデバイスの製造方法に関する。
【背景技術】
【0002】
フォトリソグラフィー技術を用いて微細な半導体デバイスを製造する際に、レチクル(マスク)に形成されたパターンを、投影光学系を介してウエハ等の基板に投影してパターンを転写する露光装置が使用されている。
【0003】
露光装置においては、半導体デバイスの微細化及び高集積化に伴い、より高い解像度でレチクルのパターンを基板に転写すること、及び、露光領域を拡大することが要求されている。このような要求を達成するために、近年では、ステップ・アンド・リピート方式の露光装置(ステッパー)からステップ・アンド・スキャン方式の露光装置(スキャナー)が主流となってきている。
【0004】
これらの露光装置では、露光中(又は露光前)において、光斜入射系の表面形状(表面位置)計測手段を用いて基板の所定の位置における表面位置を計測し、かかる所定の位置を露光する際に基板の表面を最適な結像位置に合わせ込む補正を行っている。特に、スキャナーでは、露光スリットの長手方向(即ち、走査方向に垂直な方向)について、基板の表面位置の高さ(フォーカス)だけではなく、表面の傾き(チルト)も計測している。
【0005】
このようなフォーカス及びチルトを計測する技術に関しては、幾つか提案されている(特許文献1乃至3参照)。例えば、特許文献1や特許文献2には、光学式のセンサを用いた技術が開示されている。また、特許文献3には、基板に空気を吹き付けて表面位置を計測するガスゲージセンサを用いた技術が開示されている。更には、静電容量センサを用いた技術も提案されている。
【0006】
一方、近年では、露光光の短波長化及び投影光学系の高NA化が進み、焦点深度が極めて小さくなっているため、露光すべき基板の表面を最良結像位置に合わせ込む精度、所謂、フォーカス精度もますます厳しくなってきている。そこで、基板の表面(被計測面)からの光(計測光)と参照面からの光(参照光)との干渉による干渉パターン(干渉信号)に基づいて基板の表面形状(表面位置)を計測することで、計測精度を向上させる技術が注目されている。
【0007】
かかる技術は、光源から射出された高帯域な波長幅の光を2つの光に分離し、一方の光を被計測面に、他方の光を参照面に斜入射させる。そして、被計測面で反射した計測光と参照面で反射した参照光を合成して、計測光と参照光との干渉による干渉パターン(干渉信号)を検出する。干渉信号は、被計測面を所定の方向(高さ(フォーカス)方向)に駆動しながら検出され、かかる干渉信号の変化から被計測面の表面形状を求めることができる。
【0008】
これらの技術は、広帯域な波長幅の光を用いることで可干渉距離を短くし、単色光を用いる場合と比べて、計測レンジを広く設定することができる。また、基板に塗布されたレジスト(感光剤)に起因する干渉信号誤差を低減できるという利点もある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平6−260391号公報
【特許文献2】米国特許第6249351号明細書
【特許文献3】特表2006−514744号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、従来技術では、光源の出力に時間的な変動がある場合に、干渉信号に加わるノイズ(光量ノイズ)が大きくなり、表現形状の計測精度や再現性が悪化してしまう。干渉信号はある有限の時間範囲で得られるため、かかる時間範囲において光源の出力に変動があると、各計測位置(被計測面の各駆動位置)における光量変動が発生し、計測点ごとに異なる光量となってしまう。従って、干渉信号のピーク位置を求める際の精度が悪化し、最終的に、表面形状の計測精度や再現性が悪化することになる。
【0011】
本発明は、このような従来技術の課題に鑑みてなされ、光源からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる技術を提供することを例示的目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明の一側面としての計測装置は、計測面の表面形状を計測する計測装置であって、光源からの光を計測光と参照光とに分離して、前記計測光を前記被計測面の表面に入射させ、前記参照光を参照面に入射させる光学系と、前記被計測面の表面で反射した前記計測光の光強度と、前記参照面で反射した前記参照光の光強度と、前記被計測面の表面で反射した前記計測光と前記参照面で反射した前記参照光との干渉パターンとを検出する検出部と、前記検出部によって検出された干渉パターンの干渉信号に基づいて、前記被計測面の表面形状を算出する処理部と、を有し、前記処理部は、前記検出部によって検出された前記計測光の光強度、及び、前記参照光の光強度に基づいて、前記検出部によって検出された前記干渉パターンの干渉信号に含まれる前記光源からの光の光量ばらつきによる影響を低減して、前記被計測面の表面形状を算出することを特徴とする。
【0013】
本発明の更なる目的又はその他の側面は、以下、添付図面を参照して説明される好ましい実施形態によって明らかにされるであろう。
【発明の効果】
【0014】
本発明によれば、例えば、光源からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測する技術を提供することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一側面としての計測装置の構成を示す概略図である。
【図2】図1に示す計測装置の検出部において検出される干渉信号(白色干渉信号)の一例を示す図である。
【図3】図1に示す計測装置における基板の表面形状の計測処理を説明するためのフローチャートである。
【図4】図1に示す計測装置において、検出部(の検出面)における計測光と参照光との位置関係の一例を示す図である。
【図5】図1に示す計測装置において、検出部(の検出面)における計測光と参照光との位置関係の一例を示す図である。
【図6】図1に示す計測装置における基板の表面形状の計測処理を説明するためのフローチャートである。
【図7】図6に示すフローチャートのステップS608における光源の出力の変動の影響を低減した信号の算出を説明するための図である。
【図8】基板の反射率と参照ミラーの反射率とが同じである場合に、検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図9】基板の反射率が参照ミラーの反射率よりも低い場合に、検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図10】基板の反射率が参照ミラーの反射率よりも低い場合において、光源を調整した後に検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図11】基板の反射率が参照ミラーの反射率よりも高い場合に、検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図12】基板の反射率が参照ミラーの反射率よりも高い場合において、光源を調整した後に検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図13】本発明の一側面としての計測装置の構成を示す概略図である。
【図14】図13に示す計測装置において、検出部で検出される干渉縞の干渉信号の一例を示す図である。
【図15】本発明の一側面としての計測装置の構成を示す概略図である。
【図16】本発明の一側面としての露光装置の構成を示す概略図である。
【図17】図16に示す露光装置のフォーカス制御用センサの構成を示す概略図である。
【図18】図16に示す露光装置の露光動作を説明するためのフローチャートである。
【図19】図18に示すステップS1030及びステップS1040のフォーカス較正シーケンスの詳細なフローチャートである。
【図20】フォーカス較正シーケンスにおける第1のオフセット及び第2のオフセットを説明するための図である。
【図21】図18に示すステップS1050の露光シーケンスの詳細なフローチャートである。
【発明を実施するための形態】
【0016】
以下、添付図面を参照して、本発明の好適な実施の形態について説明する。なお、各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
【0017】
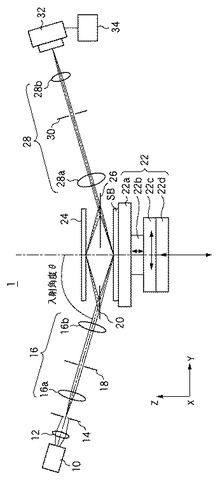
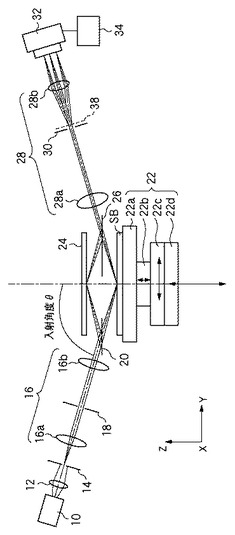
図1は、本発明の一側面としての計測装置1の構成を示す概略図である。計測装置1は、被計測面としての基板SBの表面の位置(Z軸方向の位置)、即ち、基板SBの表面形状を計測する。基板SBは、例えば、露光装置においてレチクルのパターンが転写されるウエハである。
【0018】
計測装置1は、光源10と、光源10からの光を集光するコンデンサーレンズ12と、スリット板14と、レンズ16a及び16bを含む結像光学系16と、開口絞り18と、光源10からの光を2つの光に分離するビームスプリッタ20とを有する。また、計測装置1は、基板チャック22a、Zステージ22b、Yステージ22c及びXステージ22dを含んで基板SBを支持及び駆動するステージ系22と、参照ミラー(参照面)24とを有する。また、計測装置1は、基板SBで反射した光(計測光)と参照ミラー(参照面)22で反射した光(参照光)とを合成する(即ち、計測光と参照光との合成光を生成する)ビームスプリッタ26と、レンズ28a及び28bを含む結像光学系28とを有する。更に、計測装置1は、開口絞り30と、CCDやCMOSなどの撮像素子又はフォトディテクタなどの光量検出素子で構成される検出部32と、処理部34とを有する。なお、処理部34は、計測装置1における計測処理だけではなく、計測装置1の全体を制御する機能を有する。
【0019】
以下、計測装置1の動作及び計測装置1の構成要素の機能などについて詳細に説明する。
【0020】
光源10は、本実施形態では、広帯域な波長幅の光を発するLED(例えば、白色LED)又はハロゲンランプを使用する。光源10からの光の波長帯域は、100nm以上の波長帯域、具体的には、400nm乃至800nmの波長帯域であることが好ましい。但し、基板SBにレジスト(感光剤)が塗布されている場合には、レジストの感光を防止するために、紫外線(350nm)以下の波長帯域の光を基板SBに照射しないことが好ましい。光源10からの光の偏光状態は、本実施形態では、無偏光又は円偏光の状態である。
【0021】
光源10からの光は、コンデンサーレンズ12を介して、スリット板14に集光される。スリット板14は、矩形形状の透過領域又はメカ絞りを有し、結像光学系16を介して、スリット板14の透過領域の像が基板SB及び参照ミラー24に結像される。但し、スリット板14の透過領域は、矩形形状(スリット)に限らず、円形形状(ピンホール)であってもよい。
【0022】
結像光学系16を通過した光の主光線は、入射角度θで基板SBに入射する。また、結像光学系16と基板SBとの間の光路にはビームスプリッタ20が配置されているため、結像光学系16を通過した光のうち略半分の光量の光はビームスプリッタ20で反射され、入射角度θで参照ミラー24に入射する。ここで、ビームスプリッタ20としては、例えば、金属膜や誘電体多層膜などをスプリット膜としたプリズム型ビームスプリッタ、或いは、1μm乃至5μm程度の薄い厚さの膜(材質はSiCやSiNなど)で構成されるペリクル型ビームスプリッタを使用する。
【0023】
基板SBに入射する光の入射角度θが大きくなると、基板SBに塗布された薄膜(例えば、レジスト)表面からの反射率が、かかる薄膜の裏面(即ち、薄膜と基板との界面)からの反射率に対して相対的に強くなる。従って、基板SBに塗布された薄膜の表面形状を計測する場合には、入射角度θは大きいほど好ましい。但し、入射角度θが90度に近くなると、光学系の組み立てが難しくなるため、入射角度θは70度乃至85度であることが好ましい。
【0024】
ビームスプリッタ20を透過して基板SBに入射した光は、基板SBで反射されてビームスプリッタ26に入射する。一方、ビームスプリッタ20で反射されて参照ミラー24に入射した光は、参照ミラー24で反射されてビームスプリッタ26に入射する。以下では、基板SBで反射した光を計測光とし、参照ミラー24で反射した光を参照光とする。なお、参照ミラー24としては、10nm乃至20nm程度の面精度を有するアルミ平面ミラー、或いは、同程度の面精度を有するガラス平面ミラーなどを使用することができる。
【0025】
基板SBで反射した計測光及び参照ミラー24で反射した参照光は、ビームスプリッタ26で合成され、検出部32に入射する。ビームスプリッタ26としては、ビームスプリッタ20と同様に、プリズム型ビームスプリッタやペリクル型ビームスプリッタを使用する。
【0026】
また、ビームスプリッタ26と検出部32との間の光路には、結像光学系28及び開口絞り30が配置されている。レンズ28a及び28bは、両側テレセントリックな結像光学系28を構成し、基板SBの表面を検出部32の検出面に結像させる。従って、本実施形態では、スリット板14の透過領域が、結像光学系16によって基板SB及び参照ミラー24に結像し、更に、結像光学系28によって検出部32の検出面に再結像する。検出部32の検出面では、計測光と参照光とが重なって(即ち、干渉して)干渉縞(干渉パターン)を形成する。なお、結像光学系28の瞳位置に配置された開口絞り30は、結像光学系28の開口数(NA)を規定し、本実施形態では、sin(0.1度)乃至sin(5度)程度の非常に小さなNAを規定している。
【0027】
ここで、検出部32の検出面に形成される干渉縞の干渉信号の検出(取得)方法について説明する。上述したように、基板SBは、基板SBを保持する基板チャック22a、及び、基板SBの位置合わせを行うZステージ22b、Yステージ22c及びXステージ22dを含むステージ系22に支持されている。計測光と参照光との干渉縞の干渉信号を検出部32で検出するためには、Zステージ22bを駆動すればよい。また、基板SBの計測領域を変更する場合には、Yステージ22c又はXステージ22dを用いて、基板SBの所望の領域が検出部32の検出領域に位置するように位置合わせを行う。なお、Zステージ22b、Yステージ22c及びXステージ22dの位置を高精度に制御するためには、X軸、Y軸、Z軸及びωy、ωyのチルト軸の5軸にレーザー干渉計を配置すればよい。かかるレーザー干渉計の出力に基づいてクローズドループ制御を行うことで、基板SBの表面形状をより高精度に計測することができる。特に、基板SBを複数の領域に分けて計測して基板SBの全体の表面形状を求める場合には、レーザー干渉計を用いることで、より正確に形状データのつなぎ合わせ(ステッチィング)を行うことが可能となる。
【0028】
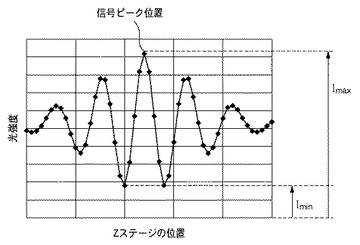
次に、検出部32で検出(取得)された干渉縞の干渉信号に基づいて基板SBの表面形状を算出する処理について説明する。かかる処理は処理部34で実行され、処理部34で算出された基板SBの表面形状は、例えば、図示しない記憶部に記憶されたり、図示しない表示部に表示されたりする。図2は、検出部32において検出される干渉信号(白色干渉信号)の一例を示す図である。ここでは、検出部32として2次元の撮像素子を用いた場合に検出される干渉信号を示している。かかる干渉信号はインターフェログラムとも呼ばれる。図2では、横軸にZステージ22bの位置(具体的には、Z軸測長干渉計又は静電容量センサによって測定された測定値)を採用し、縦軸に検出部32の出力(光強度)を採用している。なお、検出部32で検出された干渉信号は、処理部34の記憶部に記憶されている。
【0029】
図2に示す干渉信号から算出される信号ピーク位置に対応するZステージ22bの位置(Z軸測長干渉計による測定値)が、その計測領域(即ち、撮像素子の画素)での基板SBの高さである。検出部32としての2次元の撮像素子の各画素での基板SBの高を求めることで、基板SBの三次元形状を計測することが可能となる。干渉信号の信号ピーク位置を算出するためには、信号ピーク位置及びかかる信号ピーク位置の前後の数点のデータに基づいて曲線(例えば、2次関数)近似すればよい。これにより、図2における横軸(Zステージ22bの位置)のサンプリングピッチZpの1/10乃至1/50程度の分解能で信号ピーク位置を算出することができる。なお、サンプリングピッチZpは、実際にZステージ22bを等ピッチでステップ駆動する際のピッチで決定される。但し、基板SBの表面形状計測の高速性を考慮する場合には、Zステージ22bを等速度で駆動し、検出部32の検出タイミングに同期してZ軸測長干渉計の出力(Zステージ22bの位置)を取り込むことが好ましい。
【0030】
また、信号ピーク位置の算出精度を向上させるためには、図2に示す干渉信号のピーク強度Imaxが検出部32の電気ノイズに対して十分に高く、且つ、コントラスト((Imax−Imin)/(Imax+Imin))が0.75以上であることが好ましい。なお、ピーク強度Imaxが検出部32の電気ノイズ強度に対して十分に高いとは、例えば、ピーク強度Imaxが検出部32の最大感度の80%乃至90%であることを意味する。従って、このような干渉信号が得られるように、検出部32の最大感度の80%乃至90%を光量設定ターゲット(調光トレランス)として光源10を調整することが必要である。
【0031】
また、干渉信号の信号ピーク位置を算出する方法としては、米国特許第5398113号に開示されているFDA(Frequency Domain Analysis)法を用いることも可能である。FDA法は、フーリエスペクトルの位相勾配を用いてコントラストのピーク位置を算出する。
【0032】
このように、白色干渉方式においては、その分解能と精度を決める要素は、計測光と参照光との光路長差が0となる位置をいかに正確に求めるかにある。従って、位相シフト法やフーリエ変換法によって干渉縞の包絡線を求め、コントラストの最大位置から光路長差が0となる位置を求める方法、位相クロス法などを干渉信号の信号ピーク位置を算出する方法として用いることも可能である。
【0033】
計測装置1において、光源10の出力の変動(光源10からの光の光量ばらつき)は干渉信号に対するノイズとなるため、表現形状の計測精度や再現性の悪化を招く。光源10の出力の変動による計測精度や再現性の悪化を抑えるためには、光源10の出力の変動を検出して補正すればよい。例えば、光源10からの光を表面形状計測用の光と出力変動検出用の光とに分離して光源10の出力の変動を検出することが考えられるが、この場合、出力変動検出用の光を検出する構成が必要になってしまう。また、表面形状計測用の光と出力変動検出用の光とを分離する光学素子の経時変化及び劣化、空気揺らぎなどの影響によって、光源10の出力の変動を高精度に検出できないこともある。更には、光源10からの光の一部を出力変動検出用の光として用いるため、表面形状計測用の光(即ち、計測光及び参照光)の光量が低下してしまう。
【0034】
そこで、本実施形態では、検出部32において、基板SBの表面で反射した計測光の光強度と、参照ミラー24で反射した参照光の光強度と、計測光と参照光との干渉縞とを検出する。この際、基板SBの表面で反射した計測光の光強度、参照ミラー24で反射した参照光の光強度及び計測光と参照光との干渉縞は、同時(並行的)に検出されることが好ましい。そして、処理部34は、計測光の光強度、及び、参照光の光強度に基づいて、計測光と参照光との干渉縞の干渉信号から光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減して、基板SBの表面形状を算出する。
【0035】
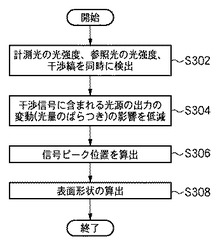
以下、図3を参照して、計測装置1における計測処理について説明する。かかる計測処理は、基板SBの表面形状を計測する処理であって、処理部34が計測装置1の各部を統括的に制御することで実行される。
【0036】
ステップS302では、検出部32において、基板SBの表面で反射した計測光の光強度と、参照ミラー24で反射した参照光の光強度と、計測光と参照光との干渉縞とを同時に検出する。
【0037】
斜入射方式の干渉計では、一般的に、光源から検出部までにおいて、計測光と参照光との光路長差が0、且つ、計測光と参照光との相対位置ずれが0になるように調整されている。これは、計測光と参照光との光路長差が0、且つ、計測光と参照光との相対位置ずれが0であるときの干渉信号のコントラストが最も高く、計測誤差の低減や再現性の向上に寄与するからである。
【0038】
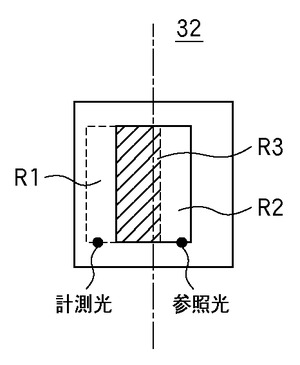
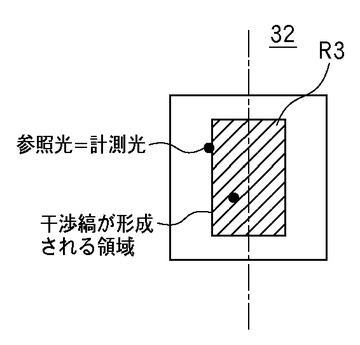
また、計測装置1において、基板SBの表面形状計測の高速性を考慮すると、基板SBは、Z軸の一方向(即ち、Z軸の+方向又は−方向)のみに駆動することが好ましい。この場合、基板SBの駆動開始時の干渉信号は全体の干渉信号の裾部分に相当し、検出部32(の検出面)上の計測光と参照光との位置関係は図4に示すようになる。そして、基板SBの駆動に従って干渉信号のピークが得られ、検出部32(の検出面)上の計測光と参照光との位置関係は図5に示すようになる。なお、図5に示す位置関係は、計測光と参照光との光路長差が0、且つ、計測光と参照光との相対位置ずれが0となるように計測装置1を調整した場合の検出部32(の検出面)上の計測光と参照光との位置関係でもある。
【0039】
基板SBをZ軸の一方向に駆動した場合、駆動開始時には、検出部32上の計測光と参照光との位置関係がずれているため、計測光と参照光とが重なる領域R3だけではなく、計測光と参照光とが重ならない領域R1及びR2が存在している(図4参照)。換言すれば、基板SBの駆動開始時には、検出部32の検出面において、計測光のみが入射する領域R1と、参照光のみが入射する領域R2と、計測光及び参照光が入射する領域R3とが存在している。そして、基板SBを駆動するにつれて、計測光と参照光との位置ずれがなくなり、計測光と参照光とが重なる(即ち、計測光及び参照光が入射する)領域R3だけが存在することになる(図5参照)。
【0040】
従って、本実施形態では、処理部34は、検出部32の検出面において、計測光のみが入射する領域R1と、参照光のみが入射する領域R2と、計測光及び参照光が入射する領域R3とが存在するように基板SBの位置を制御する。これにより、検出部32において、計測光の光強度と、参照光の光強度と、計測光と参照光との干渉縞とを同時に検出することができる。具体的には、検出部32は、計測光のみが入射する領域R1で計測光の光強度を、参照光のみが入射する領域R2で参照光の光強度を、計測光及び参照光が入射する領域R3で干渉縞を検出する。
【0041】
なお、処理部34は、計測光と参照光との光路長差が0、且つ、計測光と参照光との相対位置ずれが生じるように参照ミラー24の位置を制御してもよい。このように参照ミラー24の位置を制御することで、検出部32の検出面において、計測光のみが入射する領域R1と、参照光のみが入射する領域R2と、計測光及び参照光が入射する領域R3とを存在させることができる。
【0042】
なお、本実施形態では、1つの撮像素子で検出部32を構成し、計測光の光強度と、参照光の光強度と、計測光と参照光との干渉縞とを同時に検出している。但し、検出部32は、計測光の光強度と、参照光の光強度と、計測光と参照光との干渉縞とを同時に検出することができる構成を有していればよい。例えば、計測光の光強度を検出する光量検出素子と、参照光の光強度を検出する光量検出素子と、計測光と参照光との干渉縞のそれぞれを検出する撮像素子とで検出部32を構成してもよい。
【0043】
ステップS304では、ステップS302で検出した計測光の光強度、及び、参照光の光強度に基づいて、ステップS302で検出した干渉縞の干渉信号に含まれる光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減する。以下に具体的に説明するように、本実施形態では、干渉縞の干渉信号に含まれる光源10の出力の変動の影響を低減した信号を算出する。
【0044】
干渉縞の干渉信号I(Z)は、以下の式1で表される。但し、式1において、kは光源10からの光の波数(波長)、I(k)は分光強度(波長に対する強度)、Rmは計測光の光強度、Rrは参照光の光強度、θinは入射角度、ZはZステージ22bの位置、φmは計測光の位相成分、φrは参照光の位相成分である。
【0045】
【数1】

【0046】
式1において、光源10の出力の変動が含まれる変数は、計測光の光強度Rm及び参照光の光強度Rrであるため、式1から計測光の光強度Rm及び参照光の光強度Rrを除去する。
【0047】
式1において、I(Z)から(Rr+Rm)に係る項を減算すると、以下の式2で表される信号I’(Z)が得られる。
【0048】
【数2】
【0049】
式2において、I’(Z)を√(RrRm)を除算すると、以下の式3で表される信号I’’(Z)が得られる。
【0050】
【数3】
【0051】
式3で表される信号I’’(Z)には計測光の光強度Rm及び参照光の光強度Rrが含まれておらず、光源10の出力の変動(光源10からの光の光量ばらつき)の影響が低減(除去)されていることがわかる。
【0052】
実際には、干渉パターンの干渉信号をIr(Z)、計測光の光強度をM(Z)、参照光の光強度R(Z)とすると、以下の式4に従って、光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減した信号Ir’’(Z)を算出すればよい。
【0053】
【数4】
【0054】
ステップS306では、光源10の出力の変動の影響を低減した信号(即ち、ステップS304で算出された信号Ir’’(Z))から信号ピーク位置を算出する。なお、信号ピーク位置の算出は上述した通りであるため、ここでの詳細な説明は省略する。
【0055】
ステップS308では、ステップS306で算出した信号ピーク位置に基づいて、基板SBの表面形状を算出する。なお、基板SBの表面形状を算出は上述した通りであるため、ここでの詳細な説明は省略する。
【0056】
このように、本実施形態では、光源10の出力の変動の影響を低減した信号から信号ピーク位置を算出し、かかる信号ピーク位置から基板SBの表面形状を算出している。従って、計測装置1は、光源10からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる。
【0057】
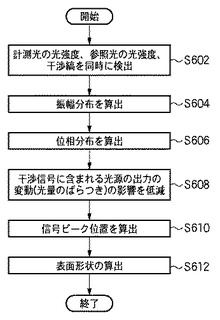
また、図6に示すように、検出部32で検出された干渉パターンの干渉信号をフーリエ変換することで、光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減した信号を算出することもできる。図6は、計測装置1における別の計測処理を説明するためのフローチャートである。
【0058】
ステップS602では、検出部32において、基板SBの表面で反射した計測光の光強度と、参照ミラー24で反射した参照光の光強度と、計測光と参照光との干渉縞とを同時に検出する。
【0059】
ステップS604では、ステップS602で検出された干渉縞の干渉信号をフーリエ変換して振幅成分、即ち、光源10及びその他の光学部材による分光強度を算出する。なお、被計測面として、例えば、基準プレートなどを用いる場合には、分光器などによって、光源10及びその他の光学部材による分光強度を予め取得していてもよい。
【0060】
ステップS606では、ステップS602で検出された干渉縞の干渉信号をフーリエ変換して位相分布を算出する。
【0061】
ステップS608では、ステップS602で検出した干渉縞の干渉信号に含まれる光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減する。本実施形態では、ステップS602で検出した計測光の光強度、参照光の光強度、ステップS604で算出した振幅成分、及び、ステップS606で算出した位相分布に基づいて、光源10の出力の変動の影響を低減した信号を算出する。
【0062】
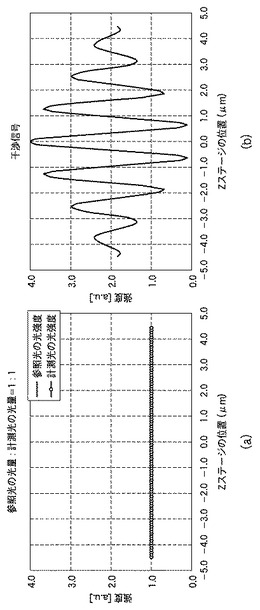
図7は、ステップS608における光源10の出力の変動の影響を低減した信号の算出を説明するための図である。図7(a)は、ステップS604で算出した振幅成分(分光強度)を示す図であって、横軸に光源10からの光の波数kを、縦軸に強度Iを採用している。図7(b)は、ステップS606で算出した位相分布を示す図であって、横軸に光源10からの光の波数kを、縦軸に位相φを採用している。図7(c)は、基板SBをZ軸方向に駆動した各位置において検出した計測光の光強度M及び参照光の光強度Rを示す図であって、横軸にZステージ22bの位置を、縦軸に強度を採用している。
【0063】
ステップS608では、図7(a)乃至図7(c)に示す各種情報に基づいて、式1を用いて光源10の出力の変動の影響を低減した信号を算出する。具体的には、式1において、I(k)については図7(a)に示す振幅成分を、(φm−φr)については図7(b)に示す位相成分を、Rmについて図7(c)に示す計測光の光強度Mを、Rrについては図7(c)に示す参照光の光強度Rを用いる。ここで、計測光の光強度M及び参照光の光強度Rについて、基板SBをZ軸方向に駆動した全域における平均値を用いれば、光源10の出力の変動の影響を低減した信号が算出される。また、基板SBのZ軸方向の各位置における計測光の光強度M及び参照光の光強度Rを用いて干渉信号の強度の変動を求め、かかる変動を干渉信号から除去してもよい。
【0064】
ステップS610では、光源10の出力の変動の影響を低減した信号(即ち、ステップS608で算出された信号)から信号ピーク位置を算出する。
【0065】
ステップS612では、ステップS610で算出した信号ピーク位置に基づいて、基板SBの表面形状を算出する。
【0066】
このように、検出部32で検出された干渉パターンの干渉信号をフーリエ変換することでも光源10の出力の変動の影響を低減した信号を算出することが可能であり、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる。
【0067】
なお、基板SBの表面形状を計測する際、参照ミラー24の表面反射率は一定であるため、検出部32で検出される参照光の光量は変化しないが、基板SBは材質によって表面反射率が変わるため、検出部32で検出される計測光の光量は変化してしまう。その結果、計測光と参照光との干渉による干渉信号の光強度及びコントラストが低下し、ノイズの影響も含めて表面形状の計測精度が低下する可能性がある。
【0068】
例えば、基板SBの反射率と参照ミラー24の反射率とが同じである場合に(検出部32における計測光の光量:参照光の光量=1:1)、検出部32で検出される計測光の光強度及び参照光の光強度を図8(a)に、干渉縞の干渉信号を図8(b)に示す。このとき、図8(b)に示す干渉信号の強度ピークは、1+1+2×√(1×1)=4.0である。
【0069】
基板SBの反射率が参照ミラー24の反射率よりも低い場合に(検出部32における計測光の光量:参照光の光量=0.2:1)、検出部32で検出される計測光の光強度及び参照光の光強度を図9(a)に、干渉縞の干渉信号を図9(b)に示す。このとき、図9(b)に示す干渉信号の強度ピークは、1+0.2+2×√(1×0.2)≒2.1である。なお、光源10からの光の光量をAとする。このように、干渉信号の強度ピークやコントラストが低い場合、空気揺らぎや検出部32のノイズの影響で表面形状の計測精度が低下してしまう。検出部32の電気的な出力ゲインを上げることで計測精度の低下を防止することが考えられるが、検出部32の電気ノイズも大きくなるため好ましくない。そこで、本実施形態では、検出部32における計測光の光強度と参照光の光強度との強度比に基づいて、光源10からの光の光量を調整する。具体的には、光源10からの光の光量がA×4.0/2.1(=A×1.9)となるように、光源10を調整する。これにより、検出部32で検出される計測光の光強度及び参照光の光強度は図10(a)に示すように、干渉縞の干渉信号は図10(b)に示すようになり、干渉信号の強度ピーク及びコントラストを向上させることができる。
【0070】
一方、基板SBの反射率が参照ミラー24の反射率よりも高い場合に(検出部32における計測光の光量:参照光の光量=2:1)、検出部32で検出される計測光の光強度及び参照光の光強度を図11(a)に、干渉縞の干渉信号を図11(b)に示す。このとき、図11(b)に示す干渉信号の強度ピークは、1+2+2×√(1×2)≒5.8となり、検出部32の出力限界を超えて(飽和)してしまう。なお、光源10からの光の光量をAとする。このように、干渉信号の強度ピークが検出部32の出力限界を超えた場合、光源10の調整(最適化)は非常に困難であるが、本実施形態では、検出部32における計測光の光強度と参照光の光強度との強度比に基づいて、光源10からの光の光量を調整する。具体的には、光源10からの光の光量がA×4.0/5.8(=A×0.69)となるように、光源10を調整する。これにより、検出部32で検出される計測光の光強度及び参照光の光強度は図12(a)に示すように、干渉縞の干渉信号は図12(b)に示すようになる。
【0071】
また、本実施形態では、基板SB又は参照ミラー24の位置を制御することで、検出部32において、計測光の光強度と、参照光の光強度と、計測光と参照光との干渉縞とを同時に検出している。但し、図13に示すように、基板SB及び参照ミラー24と検出部32との間に、基板SBで反射した計測光と参照ミラー24で反射した参照光との合成光を分離(分光)する光学素子(例えば、プリズムや回折格子など)38を配置させてもよい。この場合、検出部32では、図14(a)に示すような干渉信号が検出される。図14(a)に示す干渉信号は、計測光と参照光との光路長差(ΔZ)と光源10からの光の波数(k=2π/λ(但し、λは、光源10からの光の波長))に依存する。従って、図14(a)に示す干渉信号をフーリエ変換することで、図14(b)に示すように、基板SBを駆動した場合と同様な光路長差(ΔZ)に依存する干渉信号を得ることができる。このような技術に関しては、例えば、米国特許出願公開第2007/0086013号に開示されている。
【0072】
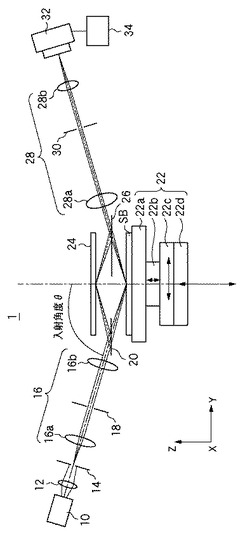
また、本実施形態では、計測装置1は、斜入射方式の干渉計の構成を有するが、図15に示すように、垂直入射方式の干渉計の構成を有していてもよい。この場合、図4に示したように、検出部32の検出面において、計測光のみが入射する領域R1と、参照光のみが入射する領域R2と、計測光及び参照光が入射する領域R3とが存在するように予め設定する必要がある。かかる設定は、例えば、参照ミラー24を傾けたり、光源10からの光を計測光と参照光とに分離するためのハーフミラー40の後段に配置される光学部材の表面に遮光膜などをコーティングしたりすることで行われる。
【0073】
次に、図16を参照して、計測装置1を備えた露光装置100について説明する。図16は、本発明の一側面としての露光装置100の構成を示す概略図である。
【0074】
露光装置100は、本実施形態では、ステップ・アンド・スキャン方式でレチクル120のパターンをウエハ140に露光する投影露光装置である。但し、露光装置100は、ステップ・アンド・リピート方式やその他の露光方式も適用することができる。
【0075】
露光装置100は、図16に示すように、照明装置110と、レチクル120を載置するレチクルステージ125と、投影光学系130と、ウエハ140を載置するウエハステージ145と、フォーカス制御用センサ150と、制御部160とを有する。
【0076】
照明装置110は、転写用のパターンが形成されたレチクル120を照明し、光源112と、照明光学系114とを有する。
【0077】
光源112は、例えば、波長約193nmのArFエキシマレーザーや波長約248nmのKrFエキシマレーザーなどを使用する。但し、光源112は、エキシマレーザーに限定するものではなく、波長約157nmのF2レーザーなどを使用してもよい。
【0078】
照明光学系114は、光源112からの光を用いてレチクル120を照明する光学系である。照明光学系114は、本実施形態では、露光に最適な形状を有する露光スリットを形成する。照明光学系114は、レンズ、ミラー、オプティカルインテグレーター、絞り等を含む。
【0079】
レチクル120は、転写用のパターンを有し、レチクルステージ125に支持及び駆動される。レチクル120から発せられた回折光は、投影光学系130を通り、ウエハ140に投影される。レチクル120とウエハ140とは、光学的に共役の関係に配置される。なお、露光装置100は図示しない光斜入射系のレチクル検出部を備えており、レチクル120は、レチクル検出部によって位置が検出され、所定の位置に配置される。
【0080】
レチクルステージ125は、図示しないレチクルチャックを介してレチクル120を支持し、図示しない移動機構に接続されている。かかる移動機構は、リニアモーターなどで構成され、X軸方向、Y軸方向、Z軸方向及び各軸の回転方向にレチクルステージ125を駆動する。
【0081】
投影光学系130は、レチクル120のパターンをウエハ140に投影する光学系である。投影光学系130は、屈折系、反射屈折系、或いは、反射系を使用することができる。
【0082】
ウエハ140は、レチクル120のパターンが投影(転写)される基板であり、ウエハステージ145に支持及び駆動される。但し、ウエハ140の代わりにガラスプレートやその他の基板を用いることもできる。ウエハ140には、レジストが塗布されている。
【0083】
ウエハステージ145は、図示しないウエハチャックを介してウエハ140を支持する。ウエハステージ145は、レチクルステージ125と同様に、リニアモーターを利用して、X軸方向、Y軸方向、Z軸方向及び各軸の回転方向にウエハ140を移動させる。また、ウエハステージ145には、基準プレート149が配置されている。
【0084】
フォーカス制御用センサ150は、計測装置1と同様に、ウエハ140の表面形状を計測する機能を有する。また、フォーカス制御用センサ150は、応答性は速いがウエハパターンによる騙されがあるセンサである。
【0085】
計測装置1は、上述した通りのいかなる構成をも適用可能であり、ここでの詳細な説明は省略する。なお、計測装置1は、応答性は遅いがウエハパターンによる騙されが少ない。
【0086】
制御部160は、CPUやメモリを有し、露光装置100の動作を制御する。制御部160は、本実施形態では、フォーカス制御用センサ150の処理部としての機能を備える。従って、制御部160は、フォーカス制御用センサ150がウエハ140の表面形状を計測する際の計測値の補正演算及び制御を行う。また、制御部160は、計測装置1の処理部34としての機能を備えていてもよい。
【0087】
ここで、ウエハ140の表面形状(フォーカス)の計測点について説明する。本実施形態では、ウエハ140の全面に亘って、走査方向(Y軸方向)にウエハステージ145を走査しながら、フォーカス制御用センサ150でウエハ140の表面形状を計測する。一方、走査方向に垂直な方向(X軸方向)には、ウエハステージ145をΔXだけステップさせ、走査方向にウエハ140の表面形状を計測する動作を繰り返してウエハ140の全面のプロファイルを求める。なお、複数のフォーカス制御用センサ150を用いてウエハ140上の異なる領域の表面形状を同時に計測してもよい。これにより、スループットを向上させることができる。
【0088】
フォーカス制御用センサ150は、本実施形態では、光学的な高さ計測システムを使用している。具体的には、フォーカス制御用センサ150は、ウエハ140の表面に対して高入射角度で光を入射させ、ウエハ140の表面で反射された反射光の像ずれをCCDなどで検出する。フォーカス制御用センサ150は、ウエハ140上の複数の計測点に光を入射させ、かかる計測点で反射された光のそれぞれを個別に受光し、異なる位置の高さ情報から露光すべき面のチルトを算出する。
【0089】
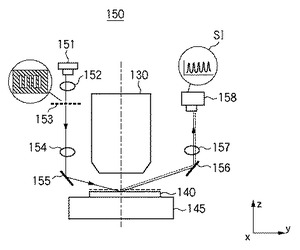
図17を参照して、フォーカス制御用センサ150を詳細に説明する。図17は、フォーカス制御用センサ150の構成を示す概略図である。フォーカス制御用センサ150は、図17に示すように、光源151と、コンデンサーレンズ152と、複数の透過スリットで構成されたパターン板153と、レンズ154と、ミラー155とを有する。更に、フォーカス制御用センサ150は、ミラー156と、レンズ157と、CCDなどの受光素子158とを有する。
【0090】
光源151からの光は、コンデンサーレンズ152を介して集光され、パターン板153を照明する。パターン板153の透過スリットを通過した光は、レンズ154及びミラー155を介してウエハ140に所定の角度で照射される。パターン板153とウエハ140とは、レンズ154を介して結像関係になっているため、パターン板153の透過スリットの空中像がウエハ140上に形成される。
【0091】
ウエハ140で反射された光は、ミラー156及びレンズ157を介して受光素子158で受光され、図17に示すように、パターン板153の各透過スリットに対応したスリット像からなる信号SIが得られる。信号SIの受光素子158での位置ずれを検出することで、ウエハ140のZ軸方向の位置を計測することができる。ウエハ140の表面がZ軸方向の位置w1から位置w2に変化した場合のウエハ140上の光軸シフト量m1は、入射角度をθinとして、m1=2・dZ・tanθinで表すことができる。但し、位置w1から位置w2への変化量をdZとする。
【0092】
例えば、入射角度θinを84度とすると、m1=19・dZとなり、ウエハ140の変位を19倍に拡大した変位量になる。受光素子158での変位量は、m1に光学系の倍率(即ち、レンズ157によるの結像倍率)が掛け合わされる。
【0093】
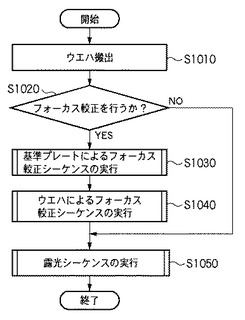
以下、露光装置100の露光動作(露光装置100を用いた露光方法)について説明する。図18は、露光装置100の露光動作を説明するためのフローチャートである。
【0094】
まず、ステップS1010において、露光装置100にウエハ140を搬入する。
【0095】
次いで、ステップS1020において、ステップS1010で搬入したウエハ140に対して、フォーカス制御用センサ150のフォーカス較正を行うかどうかを判定する。具体的には、ユーザーが露光装置100に予め登録しておいた「ロットの先頭ウエハか」、複数のロットの先頭のウエハであるか、フォーカス精度が厳しく求められる工程のウエハであるか」などの情報に基づいて判定する。
【0096】
ステップS1020において、フォーカス制御用センサ150のフォーカス較正を行わないと判定された場合には、ステップS1050に進み、後述する露光シーケンスが実行される。
【0097】
一方、ステップS1020において、フォーカス制御用センサ150のフォーカス較正を行うと判定された場合には、ステップS1030に進み、基準プレート149によるフォーカス較正シーケンスが実行される。
【0098】
次に、ステップS1040において、ウエハ140によるフォーカス較正シーケンスが実行される。
【0099】
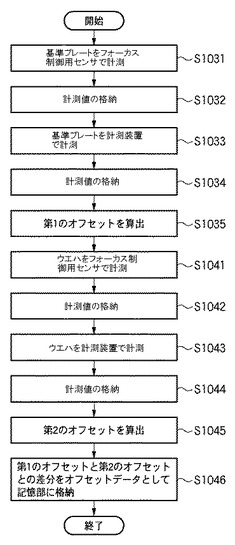
ここで、図19を参照して、ステップS1030及びステップS1040で実行されるフォーカス較正シーケンスについて説明する。図19は、ステップS1030及びステップS1040のフォーカス較正シーケンスの詳細なフローチャートである。
【0100】
基準プレート149によるフォーカス較正シーケンスでは、まず、ウエハステージ145を駆動して、フォーカス制御用センサ150の下に基準プレート149が位置するように位置決めする。なお、基準プレート149は、オプティカルフラットと呼ばれる面精度のよいガラス板などを使用している。また、基準プレート149の表面には、フォーカス制御用センサ150に計測誤差が発生しないように、反射率分布のない均一な領域が設けられており、フォーカス制御用センサ150は、かかる領域を計測する。但し、露光装置100のその他キャリブレーション(例えば、アライメントや投影光学系130の評価)に必要な各種較正用マークを設けたプレートの一部を基準プレート149として使用してもよい。
【0101】
ステップS1031において、基準プレート149をフォーカス制御用センサ150で計測し、基準プレート149のZ軸方向の位置を計測する。
【0102】
ステップS1032において、ステップS1031で計測した基準プレート149のZ軸方向の位置(計測値Om)を露光装置100の記憶部(例えば、制御部160のメモリ等)に格納する。
【0103】
次に、ウエハステージ145を駆動して、計測装置1の下に基準プレート149が位置するように位置決めする。
【0104】
ステップS1033において、基準プレート149を計測装置1で計測し、基準プレート149の表面形状を計測する。なお、計測装置1が計測する基準プレート149の計測領域(XY面)は、ステップS1031でフォーカス制御用センサ150が計測した計測領域と同じにする。
【0105】
ステップS1034において、ステップS1033で計測した基準プレート149の表面形状(計測値Pm)を記憶部に格納する。
【0106】
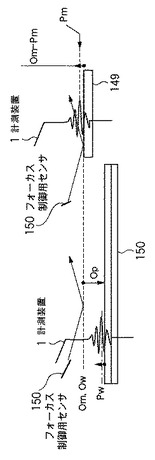
ステップS1035において、第1のオフセットを算出する。具体的には、図20に示すように、計測装置1による計測値Pmとフォーカス制御用センサ150による計測値Omの差分として、第1のオフセットを算出する。第1のオフセットは、基準プレート149の光学的に均一な面を計測しており、フォーカス制御用センサ150に計測誤差が発生しないため、ゼロになるべきものである。しかしながら、第1のオフセットは、実際には、ウエハステージ145の走査方向のシステム的なオフセット、フォーカス制御用センサ150、或いは、計測装置1の長期的なドリフトなどのエラー要因によってゼロにはならない。従って、第1のオフセットは、定期的に取得(算出)することが好ましい。但し、上述したエラー要因が発生しない場合や別に管理されている場合には、第1のオフセットを1回取得するだけでよい。ここで、図20は、フォーカス較正シーケンスにおける第1のオフセット及び後述する第2のオフセットを説明するための図である。
【0107】
ステップS1031乃至S1035が基準プレート149によるフォーカス較正シーケンスである。
【0108】
ウエハ140によるフォーカス較正シーケンスでは、まず、ウエハステージ145を駆動して、フォーカス制御用センサ150の下にウエハ140が位置するように位置決めする。なお、ウエハ140上の計測位置Wp(ウエハ面内)は、後述する露光シーケンスの計測位置と一致させるものとする。
【0109】
ステップS1041において、ウエハ140上の計測位置Wpをフォーカス制御用センサ150で計測し、計測位置WpのZ方向の位置を計測する。
【0110】
ステップS1042において、ステップS1041で計測したウエハ140上の計測位置WpのZ軸方向の位置(計測値Ow)を記憶部に格納する。
【0111】
次に、ウエハステージ145を駆動して、計測装置1の下にウエハ140上の計測位置Wpが位置するように位置決めする。
【0112】
ステップS1043において、ウエハ140上の計測位置Wpを計測装置1で計測し、ウエハ140上の計測位置Wpの表面形状を計測する。
【0113】
ステップS1044では、ステップS1043で計測したウエハ140上の計測位置Wpの表面形状(計測値Pw)を記憶部に格納する。なお、ウエハ140上の計測点としての計測位置Wpは、ウエハ内の1点、ショット内の1点、ショット内の全点、複数ショット内の全点、ウエハ内の全点などの各種モードから選択できるようになっている。
【0114】
ステップS1045において、第2のオフセットを算出する。具体的には、図20に示すように、計測装置1による計測値Pwとフォーカス制御用センサ150による計測値Owの差分として、第2のオフセットをウエハ140上の計測位置Wp毎に算出する。
【0115】
ステップS1046において、ウエハ140上の計測位置Wp毎に第1のオフセットと第2のオフセットとの差分を求め、かかる差分をオフセットデータとして記憶部に格納する。ウエハ140上の各計測位置におけるオフセット量Opは、Op(i)=[Ow(i)−Pw(i)]−(Om−Pm)から求めることができる。但し、式2において、iは、ウエハ140上の計測位置を示すポイント番号である。
【0116】
オフセット量Opとしては、露光ショット単位(ステッパーの場合はショット単位、スキャナーの場合は露光スリット単位)で、平均的高さオフセット(Z)、平均傾きオフセット(ωz、ωy)を格納してもよい。また、ウエハ140に転写するパターンは、ショット(ダイ)で繰り返されるため、ウエハ140上の各ショットの平均値として、オフセット量Opを求めてもよい。
【0117】
ステップS1041乃至S1046がウエハ140によるフォーカス較正シーケンスである。
【0118】
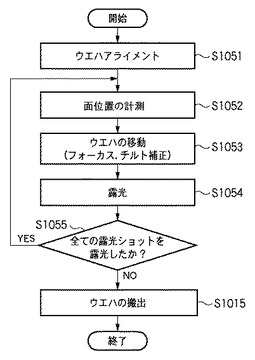
次に、図21を参照して、フォーカス較正シーケンスS1030及びS1040が終了して実行されるステップS1050の露光シーケンスについて説明する。図21は、ステップS1050の露光シーケンスの詳細なフローチャートである。
【0119】
ステップS1051において、ウエハアライメントを実行する。ウエハアライメントは、図示しないアライメントスコープでウエハ140上のアライメントマークの位置を検出し、露光装置100に対して、ウエハ140のXY平面の位置合わせを行う。
【0120】
ステップS1052において、フォーカス制御用センサ150でウエハ140上の所定領域の面位置を計測する。かかる所定領域は、上述したフォーカス較正シーケンスにおいて計測したウエハ140上の領域を含む。従って、オフセット量Op(i)で、計測値を補正してウエハ140の全面の表面形状を計測する。このように補正されたウエハ140の表面形状のデータが露光装置100の記憶部に格納される。
【0121】
ステップS1053において、ウエハステージ145を駆動して、フォーカス制御用センサ150の下の計測位置から投影光学系130の下の露光位置に第1の露光ショットが位置するようにウエハ140を移動する。この際、ウエハ140の表面形状のデータに基づいて第1の露光ショットの表面形状のデータを作成し、露光像面に対するウエハ140の表面のずれ量が最小になるように、フォーカス(Z方向)及びチルト(傾き方向)を補正する。このようにして、露光スリット単位で最適な露光像面位置にウエハ140の表面を合わせ込む。
【0122】
ステップS1054において、レチクル120のパターンをウエハ140に露光する。この際、露光装置100はスキャナーであるため、レチクル120とウエハ140をY方向(走査方向)に走査することによりレチクル120のパターンをウエハ140上に転写する。
【0123】
ステップS1055において、全ての露光ショットを露光したかどうかを判定する。全ての露光ショットを露光していないと判定された場合には、ステップS1052に戻り、次の露光ショットの表面形状のデータを作成し、フォーカス及びチルトを補正して露光スリット単位で最適な露光像面に合わせ込みながら露光を行う。一方、全ての露光ショットを露光したと判定された場合には、ステップS1056において、露光装置100からウエハ140を搬出する。
【0124】
本実施形態では、各露光ショットを露光する直前に、露光ショットの表面形状のデータの作成、露光像面からのずれ量の算出及びウエハステージ145の駆動量の算出を行っている。但し、第1の露光ショットを露光する前に、全ての露光ショットに関して、表面形状のデータの作成、露光像面からのずれ量の算出、ウエハステージ145の駆動量の算出を行ってもよい。
【0125】
また、ウエハステージ145は、シングルステージに限らず、露光時に使用する露光ステージとウエハ140のアライメントや表面形状を計測する際に使用する計測ステージとの2つのステージを有する、所謂、ツインステージの構成であってもよい。この場合、フォーカス制御用センサ150及び計測装置1は、計測ステージ側に配置することになる。
【0126】
露光装置100において、計測装置1は、上述したように、ウエハの表面形状を高精度に、且つ、再現性よく計測することができる。従って、露光面とウエハ表面とのフォーカス合わせの精度を向上させることが可能となり、デバイスの性能向上や製造歩止まりの向上にも繋がる。従って、露光装置100は、高いスループットで経済性よく高品位なデバイス(半導体素子、LCD素子、撮像素子(CCDなど)、薄膜磁気ヘッドなど)を提供することができる。なお、かかるデバイスは、露光装置100を使用して、感光剤が塗布された基板(ウエハ、ガラスプレート等)を露光する工程と、露光された基板(感光剤)を現像する工程と、他の公知の工程と、を経ることにより製造される。
【0127】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されないことはいうまでもなく、その要旨の範囲内で種々の変形及び変更が可能である。
【技術分野】
【0001】
本発明は、計測装置、露光装置及びデバイスの製造方法に関する。
【背景技術】
【0002】
フォトリソグラフィー技術を用いて微細な半導体デバイスを製造する際に、レチクル(マスク)に形成されたパターンを、投影光学系を介してウエハ等の基板に投影してパターンを転写する露光装置が使用されている。
【0003】
露光装置においては、半導体デバイスの微細化及び高集積化に伴い、より高い解像度でレチクルのパターンを基板に転写すること、及び、露光領域を拡大することが要求されている。このような要求を達成するために、近年では、ステップ・アンド・リピート方式の露光装置(ステッパー)からステップ・アンド・スキャン方式の露光装置(スキャナー)が主流となってきている。
【0004】
これらの露光装置では、露光中(又は露光前)において、光斜入射系の表面形状(表面位置)計測手段を用いて基板の所定の位置における表面位置を計測し、かかる所定の位置を露光する際に基板の表面を最適な結像位置に合わせ込む補正を行っている。特に、スキャナーでは、露光スリットの長手方向(即ち、走査方向に垂直な方向)について、基板の表面位置の高さ(フォーカス)だけではなく、表面の傾き(チルト)も計測している。
【0005】
このようなフォーカス及びチルトを計測する技術に関しては、幾つか提案されている(特許文献1乃至3参照)。例えば、特許文献1や特許文献2には、光学式のセンサを用いた技術が開示されている。また、特許文献3には、基板に空気を吹き付けて表面位置を計測するガスゲージセンサを用いた技術が開示されている。更には、静電容量センサを用いた技術も提案されている。
【0006】
一方、近年では、露光光の短波長化及び投影光学系の高NA化が進み、焦点深度が極めて小さくなっているため、露光すべき基板の表面を最良結像位置に合わせ込む精度、所謂、フォーカス精度もますます厳しくなってきている。そこで、基板の表面(被計測面)からの光(計測光)と参照面からの光(参照光)との干渉による干渉パターン(干渉信号)に基づいて基板の表面形状(表面位置)を計測することで、計測精度を向上させる技術が注目されている。
【0007】
かかる技術は、光源から射出された高帯域な波長幅の光を2つの光に分離し、一方の光を被計測面に、他方の光を参照面に斜入射させる。そして、被計測面で反射した計測光と参照面で反射した参照光を合成して、計測光と参照光との干渉による干渉パターン(干渉信号)を検出する。干渉信号は、被計測面を所定の方向(高さ(フォーカス)方向)に駆動しながら検出され、かかる干渉信号の変化から被計測面の表面形状を求めることができる。
【0008】
これらの技術は、広帯域な波長幅の光を用いることで可干渉距離を短くし、単色光を用いる場合と比べて、計測レンジを広く設定することができる。また、基板に塗布されたレジスト(感光剤)に起因する干渉信号誤差を低減できるという利点もある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平6−260391号公報
【特許文献2】米国特許第6249351号明細書
【特許文献3】特表2006−514744号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、従来技術では、光源の出力に時間的な変動がある場合に、干渉信号に加わるノイズ(光量ノイズ)が大きくなり、表現形状の計測精度や再現性が悪化してしまう。干渉信号はある有限の時間範囲で得られるため、かかる時間範囲において光源の出力に変動があると、各計測位置(被計測面の各駆動位置)における光量変動が発生し、計測点ごとに異なる光量となってしまう。従って、干渉信号のピーク位置を求める際の精度が悪化し、最終的に、表面形状の計測精度や再現性が悪化することになる。
【0011】
本発明は、このような従来技術の課題に鑑みてなされ、光源からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる技術を提供することを例示的目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明の一側面としての計測装置は、計測面の表面形状を計測する計測装置であって、光源からの光を計測光と参照光とに分離して、前記計測光を前記被計測面の表面に入射させ、前記参照光を参照面に入射させる光学系と、前記被計測面の表面で反射した前記計測光の光強度と、前記参照面で反射した前記参照光の光強度と、前記被計測面の表面で反射した前記計測光と前記参照面で反射した前記参照光との干渉パターンとを検出する検出部と、前記検出部によって検出された干渉パターンの干渉信号に基づいて、前記被計測面の表面形状を算出する処理部と、を有し、前記処理部は、前記検出部によって検出された前記計測光の光強度、及び、前記参照光の光強度に基づいて、前記検出部によって検出された前記干渉パターンの干渉信号に含まれる前記光源からの光の光量ばらつきによる影響を低減して、前記被計測面の表面形状を算出することを特徴とする。
【0013】
本発明の更なる目的又はその他の側面は、以下、添付図面を参照して説明される好ましい実施形態によって明らかにされるであろう。
【発明の効果】
【0014】
本発明によれば、例えば、光源からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測する技術を提供することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一側面としての計測装置の構成を示す概略図である。
【図2】図1に示す計測装置の検出部において検出される干渉信号(白色干渉信号)の一例を示す図である。
【図3】図1に示す計測装置における基板の表面形状の計測処理を説明するためのフローチャートである。
【図4】図1に示す計測装置において、検出部(の検出面)における計測光と参照光との位置関係の一例を示す図である。
【図5】図1に示す計測装置において、検出部(の検出面)における計測光と参照光との位置関係の一例を示す図である。
【図6】図1に示す計測装置における基板の表面形状の計測処理を説明するためのフローチャートである。
【図7】図6に示すフローチャートのステップS608における光源の出力の変動の影響を低減した信号の算出を説明するための図である。
【図8】基板の反射率と参照ミラーの反射率とが同じである場合に、検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図9】基板の反射率が参照ミラーの反射率よりも低い場合に、検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図10】基板の反射率が参照ミラーの反射率よりも低い場合において、光源を調整した後に検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図11】基板の反射率が参照ミラーの反射率よりも高い場合に、検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図12】基板の反射率が参照ミラーの反射率よりも高い場合において、光源を調整した後に検出部で検出される計測光の光強度、参照光の光強度、及び、干渉縞の干渉信号を示す図である。
【図13】本発明の一側面としての計測装置の構成を示す概略図である。
【図14】図13に示す計測装置において、検出部で検出される干渉縞の干渉信号の一例を示す図である。
【図15】本発明の一側面としての計測装置の構成を示す概略図である。
【図16】本発明の一側面としての露光装置の構成を示す概略図である。
【図17】図16に示す露光装置のフォーカス制御用センサの構成を示す概略図である。
【図18】図16に示す露光装置の露光動作を説明するためのフローチャートである。
【図19】図18に示すステップS1030及びステップS1040のフォーカス較正シーケンスの詳細なフローチャートである。
【図20】フォーカス較正シーケンスにおける第1のオフセット及び第2のオフセットを説明するための図である。
【図21】図18に示すステップS1050の露光シーケンスの詳細なフローチャートである。
【発明を実施するための形態】
【0016】
以下、添付図面を参照して、本発明の好適な実施の形態について説明する。なお、各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
【0017】
図1は、本発明の一側面としての計測装置1の構成を示す概略図である。計測装置1は、被計測面としての基板SBの表面の位置(Z軸方向の位置)、即ち、基板SBの表面形状を計測する。基板SBは、例えば、露光装置においてレチクルのパターンが転写されるウエハである。
【0018】
計測装置1は、光源10と、光源10からの光を集光するコンデンサーレンズ12と、スリット板14と、レンズ16a及び16bを含む結像光学系16と、開口絞り18と、光源10からの光を2つの光に分離するビームスプリッタ20とを有する。また、計測装置1は、基板チャック22a、Zステージ22b、Yステージ22c及びXステージ22dを含んで基板SBを支持及び駆動するステージ系22と、参照ミラー(参照面)24とを有する。また、計測装置1は、基板SBで反射した光(計測光)と参照ミラー(参照面)22で反射した光(参照光)とを合成する(即ち、計測光と参照光との合成光を生成する)ビームスプリッタ26と、レンズ28a及び28bを含む結像光学系28とを有する。更に、計測装置1は、開口絞り30と、CCDやCMOSなどの撮像素子又はフォトディテクタなどの光量検出素子で構成される検出部32と、処理部34とを有する。なお、処理部34は、計測装置1における計測処理だけではなく、計測装置1の全体を制御する機能を有する。
【0019】
以下、計測装置1の動作及び計測装置1の構成要素の機能などについて詳細に説明する。
【0020】
光源10は、本実施形態では、広帯域な波長幅の光を発するLED(例えば、白色LED)又はハロゲンランプを使用する。光源10からの光の波長帯域は、100nm以上の波長帯域、具体的には、400nm乃至800nmの波長帯域であることが好ましい。但し、基板SBにレジスト(感光剤)が塗布されている場合には、レジストの感光を防止するために、紫外線(350nm)以下の波長帯域の光を基板SBに照射しないことが好ましい。光源10からの光の偏光状態は、本実施形態では、無偏光又は円偏光の状態である。
【0021】
光源10からの光は、コンデンサーレンズ12を介して、スリット板14に集光される。スリット板14は、矩形形状の透過領域又はメカ絞りを有し、結像光学系16を介して、スリット板14の透過領域の像が基板SB及び参照ミラー24に結像される。但し、スリット板14の透過領域は、矩形形状(スリット)に限らず、円形形状(ピンホール)であってもよい。
【0022】
結像光学系16を通過した光の主光線は、入射角度θで基板SBに入射する。また、結像光学系16と基板SBとの間の光路にはビームスプリッタ20が配置されているため、結像光学系16を通過した光のうち略半分の光量の光はビームスプリッタ20で反射され、入射角度θで参照ミラー24に入射する。ここで、ビームスプリッタ20としては、例えば、金属膜や誘電体多層膜などをスプリット膜としたプリズム型ビームスプリッタ、或いは、1μm乃至5μm程度の薄い厚さの膜(材質はSiCやSiNなど)で構成されるペリクル型ビームスプリッタを使用する。
【0023】
基板SBに入射する光の入射角度θが大きくなると、基板SBに塗布された薄膜(例えば、レジスト)表面からの反射率が、かかる薄膜の裏面(即ち、薄膜と基板との界面)からの反射率に対して相対的に強くなる。従って、基板SBに塗布された薄膜の表面形状を計測する場合には、入射角度θは大きいほど好ましい。但し、入射角度θが90度に近くなると、光学系の組み立てが難しくなるため、入射角度θは70度乃至85度であることが好ましい。
【0024】
ビームスプリッタ20を透過して基板SBに入射した光は、基板SBで反射されてビームスプリッタ26に入射する。一方、ビームスプリッタ20で反射されて参照ミラー24に入射した光は、参照ミラー24で反射されてビームスプリッタ26に入射する。以下では、基板SBで反射した光を計測光とし、参照ミラー24で反射した光を参照光とする。なお、参照ミラー24としては、10nm乃至20nm程度の面精度を有するアルミ平面ミラー、或いは、同程度の面精度を有するガラス平面ミラーなどを使用することができる。
【0025】
基板SBで反射した計測光及び参照ミラー24で反射した参照光は、ビームスプリッタ26で合成され、検出部32に入射する。ビームスプリッタ26としては、ビームスプリッタ20と同様に、プリズム型ビームスプリッタやペリクル型ビームスプリッタを使用する。
【0026】
また、ビームスプリッタ26と検出部32との間の光路には、結像光学系28及び開口絞り30が配置されている。レンズ28a及び28bは、両側テレセントリックな結像光学系28を構成し、基板SBの表面を検出部32の検出面に結像させる。従って、本実施形態では、スリット板14の透過領域が、結像光学系16によって基板SB及び参照ミラー24に結像し、更に、結像光学系28によって検出部32の検出面に再結像する。検出部32の検出面では、計測光と参照光とが重なって(即ち、干渉して)干渉縞(干渉パターン)を形成する。なお、結像光学系28の瞳位置に配置された開口絞り30は、結像光学系28の開口数(NA)を規定し、本実施形態では、sin(0.1度)乃至sin(5度)程度の非常に小さなNAを規定している。
【0027】
ここで、検出部32の検出面に形成される干渉縞の干渉信号の検出(取得)方法について説明する。上述したように、基板SBは、基板SBを保持する基板チャック22a、及び、基板SBの位置合わせを行うZステージ22b、Yステージ22c及びXステージ22dを含むステージ系22に支持されている。計測光と参照光との干渉縞の干渉信号を検出部32で検出するためには、Zステージ22bを駆動すればよい。また、基板SBの計測領域を変更する場合には、Yステージ22c又はXステージ22dを用いて、基板SBの所望の領域が検出部32の検出領域に位置するように位置合わせを行う。なお、Zステージ22b、Yステージ22c及びXステージ22dの位置を高精度に制御するためには、X軸、Y軸、Z軸及びωy、ωyのチルト軸の5軸にレーザー干渉計を配置すればよい。かかるレーザー干渉計の出力に基づいてクローズドループ制御を行うことで、基板SBの表面形状をより高精度に計測することができる。特に、基板SBを複数の領域に分けて計測して基板SBの全体の表面形状を求める場合には、レーザー干渉計を用いることで、より正確に形状データのつなぎ合わせ(ステッチィング)を行うことが可能となる。
【0028】
次に、検出部32で検出(取得)された干渉縞の干渉信号に基づいて基板SBの表面形状を算出する処理について説明する。かかる処理は処理部34で実行され、処理部34で算出された基板SBの表面形状は、例えば、図示しない記憶部に記憶されたり、図示しない表示部に表示されたりする。図2は、検出部32において検出される干渉信号(白色干渉信号)の一例を示す図である。ここでは、検出部32として2次元の撮像素子を用いた場合に検出される干渉信号を示している。かかる干渉信号はインターフェログラムとも呼ばれる。図2では、横軸にZステージ22bの位置(具体的には、Z軸測長干渉計又は静電容量センサによって測定された測定値)を採用し、縦軸に検出部32の出力(光強度)を採用している。なお、検出部32で検出された干渉信号は、処理部34の記憶部に記憶されている。
【0029】
図2に示す干渉信号から算出される信号ピーク位置に対応するZステージ22bの位置(Z軸測長干渉計による測定値)が、その計測領域(即ち、撮像素子の画素)での基板SBの高さである。検出部32としての2次元の撮像素子の各画素での基板SBの高を求めることで、基板SBの三次元形状を計測することが可能となる。干渉信号の信号ピーク位置を算出するためには、信号ピーク位置及びかかる信号ピーク位置の前後の数点のデータに基づいて曲線(例えば、2次関数)近似すればよい。これにより、図2における横軸(Zステージ22bの位置)のサンプリングピッチZpの1/10乃至1/50程度の分解能で信号ピーク位置を算出することができる。なお、サンプリングピッチZpは、実際にZステージ22bを等ピッチでステップ駆動する際のピッチで決定される。但し、基板SBの表面形状計測の高速性を考慮する場合には、Zステージ22bを等速度で駆動し、検出部32の検出タイミングに同期してZ軸測長干渉計の出力(Zステージ22bの位置)を取り込むことが好ましい。
【0030】
また、信号ピーク位置の算出精度を向上させるためには、図2に示す干渉信号のピーク強度Imaxが検出部32の電気ノイズに対して十分に高く、且つ、コントラスト((Imax−Imin)/(Imax+Imin))が0.75以上であることが好ましい。なお、ピーク強度Imaxが検出部32の電気ノイズ強度に対して十分に高いとは、例えば、ピーク強度Imaxが検出部32の最大感度の80%乃至90%であることを意味する。従って、このような干渉信号が得られるように、検出部32の最大感度の80%乃至90%を光量設定ターゲット(調光トレランス)として光源10を調整することが必要である。
【0031】
また、干渉信号の信号ピーク位置を算出する方法としては、米国特許第5398113号に開示されているFDA(Frequency Domain Analysis)法を用いることも可能である。FDA法は、フーリエスペクトルの位相勾配を用いてコントラストのピーク位置を算出する。
【0032】
このように、白色干渉方式においては、その分解能と精度を決める要素は、計測光と参照光との光路長差が0となる位置をいかに正確に求めるかにある。従って、位相シフト法やフーリエ変換法によって干渉縞の包絡線を求め、コントラストの最大位置から光路長差が0となる位置を求める方法、位相クロス法などを干渉信号の信号ピーク位置を算出する方法として用いることも可能である。
【0033】
計測装置1において、光源10の出力の変動(光源10からの光の光量ばらつき)は干渉信号に対するノイズとなるため、表現形状の計測精度や再現性の悪化を招く。光源10の出力の変動による計測精度や再現性の悪化を抑えるためには、光源10の出力の変動を検出して補正すればよい。例えば、光源10からの光を表面形状計測用の光と出力変動検出用の光とに分離して光源10の出力の変動を検出することが考えられるが、この場合、出力変動検出用の光を検出する構成が必要になってしまう。また、表面形状計測用の光と出力変動検出用の光とを分離する光学素子の経時変化及び劣化、空気揺らぎなどの影響によって、光源10の出力の変動を高精度に検出できないこともある。更には、光源10からの光の一部を出力変動検出用の光として用いるため、表面形状計測用の光(即ち、計測光及び参照光)の光量が低下してしまう。
【0034】
そこで、本実施形態では、検出部32において、基板SBの表面で反射した計測光の光強度と、参照ミラー24で反射した参照光の光強度と、計測光と参照光との干渉縞とを検出する。この際、基板SBの表面で反射した計測光の光強度、参照ミラー24で反射した参照光の光強度及び計測光と参照光との干渉縞は、同時(並行的)に検出されることが好ましい。そして、処理部34は、計測光の光強度、及び、参照光の光強度に基づいて、計測光と参照光との干渉縞の干渉信号から光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減して、基板SBの表面形状を算出する。
【0035】
以下、図3を参照して、計測装置1における計測処理について説明する。かかる計測処理は、基板SBの表面形状を計測する処理であって、処理部34が計測装置1の各部を統括的に制御することで実行される。
【0036】
ステップS302では、検出部32において、基板SBの表面で反射した計測光の光強度と、参照ミラー24で反射した参照光の光強度と、計測光と参照光との干渉縞とを同時に検出する。
【0037】
斜入射方式の干渉計では、一般的に、光源から検出部までにおいて、計測光と参照光との光路長差が0、且つ、計測光と参照光との相対位置ずれが0になるように調整されている。これは、計測光と参照光との光路長差が0、且つ、計測光と参照光との相対位置ずれが0であるときの干渉信号のコントラストが最も高く、計測誤差の低減や再現性の向上に寄与するからである。
【0038】
また、計測装置1において、基板SBの表面形状計測の高速性を考慮すると、基板SBは、Z軸の一方向(即ち、Z軸の+方向又は−方向)のみに駆動することが好ましい。この場合、基板SBの駆動開始時の干渉信号は全体の干渉信号の裾部分に相当し、検出部32(の検出面)上の計測光と参照光との位置関係は図4に示すようになる。そして、基板SBの駆動に従って干渉信号のピークが得られ、検出部32(の検出面)上の計測光と参照光との位置関係は図5に示すようになる。なお、図5に示す位置関係は、計測光と参照光との光路長差が0、且つ、計測光と参照光との相対位置ずれが0となるように計測装置1を調整した場合の検出部32(の検出面)上の計測光と参照光との位置関係でもある。
【0039】
基板SBをZ軸の一方向に駆動した場合、駆動開始時には、検出部32上の計測光と参照光との位置関係がずれているため、計測光と参照光とが重なる領域R3だけではなく、計測光と参照光とが重ならない領域R1及びR2が存在している(図4参照)。換言すれば、基板SBの駆動開始時には、検出部32の検出面において、計測光のみが入射する領域R1と、参照光のみが入射する領域R2と、計測光及び参照光が入射する領域R3とが存在している。そして、基板SBを駆動するにつれて、計測光と参照光との位置ずれがなくなり、計測光と参照光とが重なる(即ち、計測光及び参照光が入射する)領域R3だけが存在することになる(図5参照)。
【0040】
従って、本実施形態では、処理部34は、検出部32の検出面において、計測光のみが入射する領域R1と、参照光のみが入射する領域R2と、計測光及び参照光が入射する領域R3とが存在するように基板SBの位置を制御する。これにより、検出部32において、計測光の光強度と、参照光の光強度と、計測光と参照光との干渉縞とを同時に検出することができる。具体的には、検出部32は、計測光のみが入射する領域R1で計測光の光強度を、参照光のみが入射する領域R2で参照光の光強度を、計測光及び参照光が入射する領域R3で干渉縞を検出する。
【0041】
なお、処理部34は、計測光と参照光との光路長差が0、且つ、計測光と参照光との相対位置ずれが生じるように参照ミラー24の位置を制御してもよい。このように参照ミラー24の位置を制御することで、検出部32の検出面において、計測光のみが入射する領域R1と、参照光のみが入射する領域R2と、計測光及び参照光が入射する領域R3とを存在させることができる。
【0042】
なお、本実施形態では、1つの撮像素子で検出部32を構成し、計測光の光強度と、参照光の光強度と、計測光と参照光との干渉縞とを同時に検出している。但し、検出部32は、計測光の光強度と、参照光の光強度と、計測光と参照光との干渉縞とを同時に検出することができる構成を有していればよい。例えば、計測光の光強度を検出する光量検出素子と、参照光の光強度を検出する光量検出素子と、計測光と参照光との干渉縞のそれぞれを検出する撮像素子とで検出部32を構成してもよい。
【0043】
ステップS304では、ステップS302で検出した計測光の光強度、及び、参照光の光強度に基づいて、ステップS302で検出した干渉縞の干渉信号に含まれる光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減する。以下に具体的に説明するように、本実施形態では、干渉縞の干渉信号に含まれる光源10の出力の変動の影響を低減した信号を算出する。
【0044】
干渉縞の干渉信号I(Z)は、以下の式1で表される。但し、式1において、kは光源10からの光の波数(波長)、I(k)は分光強度(波長に対する強度)、Rmは計測光の光強度、Rrは参照光の光強度、θinは入射角度、ZはZステージ22bの位置、φmは計測光の位相成分、φrは参照光の位相成分である。
【0045】
【数1】
【0046】
式1において、光源10の出力の変動が含まれる変数は、計測光の光強度Rm及び参照光の光強度Rrであるため、式1から計測光の光強度Rm及び参照光の光強度Rrを除去する。
【0047】
式1において、I(Z)から(Rr+Rm)に係る項を減算すると、以下の式2で表される信号I’(Z)が得られる。
【0048】
【数2】
【0049】
式2において、I’(Z)を√(RrRm)を除算すると、以下の式3で表される信号I’’(Z)が得られる。
【0050】
【数3】
【0051】
式3で表される信号I’’(Z)には計測光の光強度Rm及び参照光の光強度Rrが含まれておらず、光源10の出力の変動(光源10からの光の光量ばらつき)の影響が低減(除去)されていることがわかる。
【0052】
実際には、干渉パターンの干渉信号をIr(Z)、計測光の光強度をM(Z)、参照光の光強度R(Z)とすると、以下の式4に従って、光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減した信号Ir’’(Z)を算出すればよい。
【0053】
【数4】
【0054】
ステップS306では、光源10の出力の変動の影響を低減した信号(即ち、ステップS304で算出された信号Ir’’(Z))から信号ピーク位置を算出する。なお、信号ピーク位置の算出は上述した通りであるため、ここでの詳細な説明は省略する。
【0055】
ステップS308では、ステップS306で算出した信号ピーク位置に基づいて、基板SBの表面形状を算出する。なお、基板SBの表面形状を算出は上述した通りであるため、ここでの詳細な説明は省略する。
【0056】
このように、本実施形態では、光源10の出力の変動の影響を低減した信号から信号ピーク位置を算出し、かかる信号ピーク位置から基板SBの表面形状を算出している。従って、計測装置1は、光源10からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる。
【0057】
また、図6に示すように、検出部32で検出された干渉パターンの干渉信号をフーリエ変換することで、光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減した信号を算出することもできる。図6は、計測装置1における別の計測処理を説明するためのフローチャートである。
【0058】
ステップS602では、検出部32において、基板SBの表面で反射した計測光の光強度と、参照ミラー24で反射した参照光の光強度と、計測光と参照光との干渉縞とを同時に検出する。
【0059】
ステップS604では、ステップS602で検出された干渉縞の干渉信号をフーリエ変換して振幅成分、即ち、光源10及びその他の光学部材による分光強度を算出する。なお、被計測面として、例えば、基準プレートなどを用いる場合には、分光器などによって、光源10及びその他の光学部材による分光強度を予め取得していてもよい。
【0060】
ステップS606では、ステップS602で検出された干渉縞の干渉信号をフーリエ変換して位相分布を算出する。
【0061】
ステップS608では、ステップS602で検出した干渉縞の干渉信号に含まれる光源10の出力の変動(光源10からの光の光量ばらつき)の影響を低減する。本実施形態では、ステップS602で検出した計測光の光強度、参照光の光強度、ステップS604で算出した振幅成分、及び、ステップS606で算出した位相分布に基づいて、光源10の出力の変動の影響を低減した信号を算出する。
【0062】
図7は、ステップS608における光源10の出力の変動の影響を低減した信号の算出を説明するための図である。図7(a)は、ステップS604で算出した振幅成分(分光強度)を示す図であって、横軸に光源10からの光の波数kを、縦軸に強度Iを採用している。図7(b)は、ステップS606で算出した位相分布を示す図であって、横軸に光源10からの光の波数kを、縦軸に位相φを採用している。図7(c)は、基板SBをZ軸方向に駆動した各位置において検出した計測光の光強度M及び参照光の光強度Rを示す図であって、横軸にZステージ22bの位置を、縦軸に強度を採用している。
【0063】
ステップS608では、図7(a)乃至図7(c)に示す各種情報に基づいて、式1を用いて光源10の出力の変動の影響を低減した信号を算出する。具体的には、式1において、I(k)については図7(a)に示す振幅成分を、(φm−φr)については図7(b)に示す位相成分を、Rmについて図7(c)に示す計測光の光強度Mを、Rrについては図7(c)に示す参照光の光強度Rを用いる。ここで、計測光の光強度M及び参照光の光強度Rについて、基板SBをZ軸方向に駆動した全域における平均値を用いれば、光源10の出力の変動の影響を低減した信号が算出される。また、基板SBのZ軸方向の各位置における計測光の光強度M及び参照光の光強度Rを用いて干渉信号の強度の変動を求め、かかる変動を干渉信号から除去してもよい。
【0064】
ステップS610では、光源10の出力の変動の影響を低減した信号(即ち、ステップS608で算出された信号)から信号ピーク位置を算出する。
【0065】
ステップS612では、ステップS610で算出した信号ピーク位置に基づいて、基板SBの表面形状を算出する。
【0066】
このように、検出部32で検出された干渉パターンの干渉信号をフーリエ変換することでも光源10の出力の変動の影響を低減した信号を算出することが可能であり、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる。
【0067】
なお、基板SBの表面形状を計測する際、参照ミラー24の表面反射率は一定であるため、検出部32で検出される参照光の光量は変化しないが、基板SBは材質によって表面反射率が変わるため、検出部32で検出される計測光の光量は変化してしまう。その結果、計測光と参照光との干渉による干渉信号の光強度及びコントラストが低下し、ノイズの影響も含めて表面形状の計測精度が低下する可能性がある。
【0068】
例えば、基板SBの反射率と参照ミラー24の反射率とが同じである場合に(検出部32における計測光の光量:参照光の光量=1:1)、検出部32で検出される計測光の光強度及び参照光の光強度を図8(a)に、干渉縞の干渉信号を図8(b)に示す。このとき、図8(b)に示す干渉信号の強度ピークは、1+1+2×√(1×1)=4.0である。
【0069】
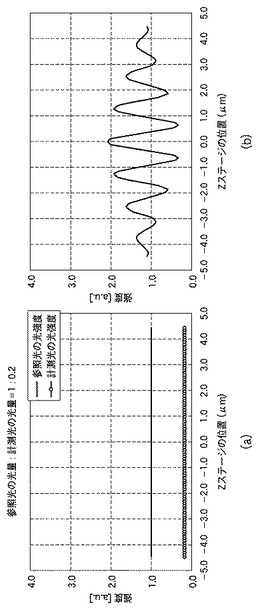
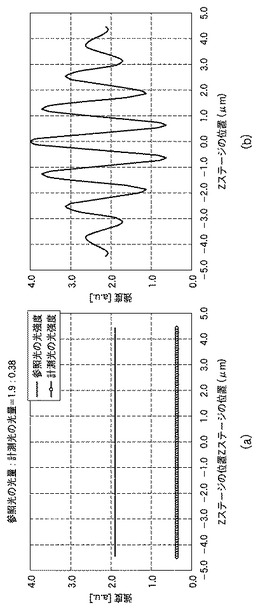
基板SBの反射率が参照ミラー24の反射率よりも低い場合に(検出部32における計測光の光量:参照光の光量=0.2:1)、検出部32で検出される計測光の光強度及び参照光の光強度を図9(a)に、干渉縞の干渉信号を図9(b)に示す。このとき、図9(b)に示す干渉信号の強度ピークは、1+0.2+2×√(1×0.2)≒2.1である。なお、光源10からの光の光量をAとする。このように、干渉信号の強度ピークやコントラストが低い場合、空気揺らぎや検出部32のノイズの影響で表面形状の計測精度が低下してしまう。検出部32の電気的な出力ゲインを上げることで計測精度の低下を防止することが考えられるが、検出部32の電気ノイズも大きくなるため好ましくない。そこで、本実施形態では、検出部32における計測光の光強度と参照光の光強度との強度比に基づいて、光源10からの光の光量を調整する。具体的には、光源10からの光の光量がA×4.0/2.1(=A×1.9)となるように、光源10を調整する。これにより、検出部32で検出される計測光の光強度及び参照光の光強度は図10(a)に示すように、干渉縞の干渉信号は図10(b)に示すようになり、干渉信号の強度ピーク及びコントラストを向上させることができる。
【0070】
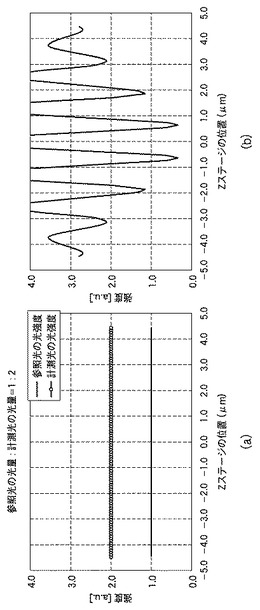
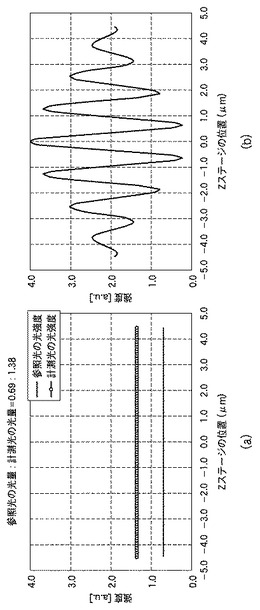
一方、基板SBの反射率が参照ミラー24の反射率よりも高い場合に(検出部32における計測光の光量:参照光の光量=2:1)、検出部32で検出される計測光の光強度及び参照光の光強度を図11(a)に、干渉縞の干渉信号を図11(b)に示す。このとき、図11(b)に示す干渉信号の強度ピークは、1+2+2×√(1×2)≒5.8となり、検出部32の出力限界を超えて(飽和)してしまう。なお、光源10からの光の光量をAとする。このように、干渉信号の強度ピークが検出部32の出力限界を超えた場合、光源10の調整(最適化)は非常に困難であるが、本実施形態では、検出部32における計測光の光強度と参照光の光強度との強度比に基づいて、光源10からの光の光量を調整する。具体的には、光源10からの光の光量がA×4.0/5.8(=A×0.69)となるように、光源10を調整する。これにより、検出部32で検出される計測光の光強度及び参照光の光強度は図12(a)に示すように、干渉縞の干渉信号は図12(b)に示すようになる。
【0071】
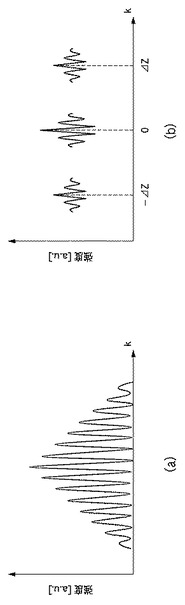
また、本実施形態では、基板SB又は参照ミラー24の位置を制御することで、検出部32において、計測光の光強度と、参照光の光強度と、計測光と参照光との干渉縞とを同時に検出している。但し、図13に示すように、基板SB及び参照ミラー24と検出部32との間に、基板SBで反射した計測光と参照ミラー24で反射した参照光との合成光を分離(分光)する光学素子(例えば、プリズムや回折格子など)38を配置させてもよい。この場合、検出部32では、図14(a)に示すような干渉信号が検出される。図14(a)に示す干渉信号は、計測光と参照光との光路長差(ΔZ)と光源10からの光の波数(k=2π/λ(但し、λは、光源10からの光の波長))に依存する。従って、図14(a)に示す干渉信号をフーリエ変換することで、図14(b)に示すように、基板SBを駆動した場合と同様な光路長差(ΔZ)に依存する干渉信号を得ることができる。このような技術に関しては、例えば、米国特許出願公開第2007/0086013号に開示されている。
【0072】
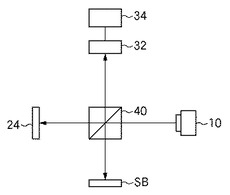
また、本実施形態では、計測装置1は、斜入射方式の干渉計の構成を有するが、図15に示すように、垂直入射方式の干渉計の構成を有していてもよい。この場合、図4に示したように、検出部32の検出面において、計測光のみが入射する領域R1と、参照光のみが入射する領域R2と、計測光及び参照光が入射する領域R3とが存在するように予め設定する必要がある。かかる設定は、例えば、参照ミラー24を傾けたり、光源10からの光を計測光と参照光とに分離するためのハーフミラー40の後段に配置される光学部材の表面に遮光膜などをコーティングしたりすることで行われる。
【0073】
次に、図16を参照して、計測装置1を備えた露光装置100について説明する。図16は、本発明の一側面としての露光装置100の構成を示す概略図である。
【0074】
露光装置100は、本実施形態では、ステップ・アンド・スキャン方式でレチクル120のパターンをウエハ140に露光する投影露光装置である。但し、露光装置100は、ステップ・アンド・リピート方式やその他の露光方式も適用することができる。
【0075】
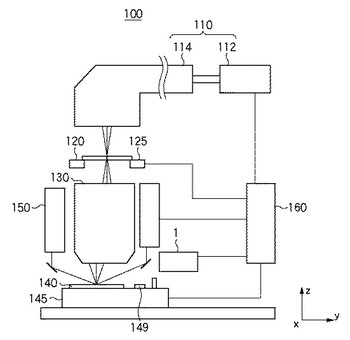
露光装置100は、図16に示すように、照明装置110と、レチクル120を載置するレチクルステージ125と、投影光学系130と、ウエハ140を載置するウエハステージ145と、フォーカス制御用センサ150と、制御部160とを有する。
【0076】
照明装置110は、転写用のパターンが形成されたレチクル120を照明し、光源112と、照明光学系114とを有する。
【0077】
光源112は、例えば、波長約193nmのArFエキシマレーザーや波長約248nmのKrFエキシマレーザーなどを使用する。但し、光源112は、エキシマレーザーに限定するものではなく、波長約157nmのF2レーザーなどを使用してもよい。
【0078】
照明光学系114は、光源112からの光を用いてレチクル120を照明する光学系である。照明光学系114は、本実施形態では、露光に最適な形状を有する露光スリットを形成する。照明光学系114は、レンズ、ミラー、オプティカルインテグレーター、絞り等を含む。
【0079】
レチクル120は、転写用のパターンを有し、レチクルステージ125に支持及び駆動される。レチクル120から発せられた回折光は、投影光学系130を通り、ウエハ140に投影される。レチクル120とウエハ140とは、光学的に共役の関係に配置される。なお、露光装置100は図示しない光斜入射系のレチクル検出部を備えており、レチクル120は、レチクル検出部によって位置が検出され、所定の位置に配置される。
【0080】
レチクルステージ125は、図示しないレチクルチャックを介してレチクル120を支持し、図示しない移動機構に接続されている。かかる移動機構は、リニアモーターなどで構成され、X軸方向、Y軸方向、Z軸方向及び各軸の回転方向にレチクルステージ125を駆動する。
【0081】
投影光学系130は、レチクル120のパターンをウエハ140に投影する光学系である。投影光学系130は、屈折系、反射屈折系、或いは、反射系を使用することができる。
【0082】
ウエハ140は、レチクル120のパターンが投影(転写)される基板であり、ウエハステージ145に支持及び駆動される。但し、ウエハ140の代わりにガラスプレートやその他の基板を用いることもできる。ウエハ140には、レジストが塗布されている。
【0083】
ウエハステージ145は、図示しないウエハチャックを介してウエハ140を支持する。ウエハステージ145は、レチクルステージ125と同様に、リニアモーターを利用して、X軸方向、Y軸方向、Z軸方向及び各軸の回転方向にウエハ140を移動させる。また、ウエハステージ145には、基準プレート149が配置されている。
【0084】
フォーカス制御用センサ150は、計測装置1と同様に、ウエハ140の表面形状を計測する機能を有する。また、フォーカス制御用センサ150は、応答性は速いがウエハパターンによる騙されがあるセンサである。
【0085】
計測装置1は、上述した通りのいかなる構成をも適用可能であり、ここでの詳細な説明は省略する。なお、計測装置1は、応答性は遅いがウエハパターンによる騙されが少ない。
【0086】
制御部160は、CPUやメモリを有し、露光装置100の動作を制御する。制御部160は、本実施形態では、フォーカス制御用センサ150の処理部としての機能を備える。従って、制御部160は、フォーカス制御用センサ150がウエハ140の表面形状を計測する際の計測値の補正演算及び制御を行う。また、制御部160は、計測装置1の処理部34としての機能を備えていてもよい。
【0087】
ここで、ウエハ140の表面形状(フォーカス)の計測点について説明する。本実施形態では、ウエハ140の全面に亘って、走査方向(Y軸方向)にウエハステージ145を走査しながら、フォーカス制御用センサ150でウエハ140の表面形状を計測する。一方、走査方向に垂直な方向(X軸方向)には、ウエハステージ145をΔXだけステップさせ、走査方向にウエハ140の表面形状を計測する動作を繰り返してウエハ140の全面のプロファイルを求める。なお、複数のフォーカス制御用センサ150を用いてウエハ140上の異なる領域の表面形状を同時に計測してもよい。これにより、スループットを向上させることができる。
【0088】
フォーカス制御用センサ150は、本実施形態では、光学的な高さ計測システムを使用している。具体的には、フォーカス制御用センサ150は、ウエハ140の表面に対して高入射角度で光を入射させ、ウエハ140の表面で反射された反射光の像ずれをCCDなどで検出する。フォーカス制御用センサ150は、ウエハ140上の複数の計測点に光を入射させ、かかる計測点で反射された光のそれぞれを個別に受光し、異なる位置の高さ情報から露光すべき面のチルトを算出する。
【0089】
図17を参照して、フォーカス制御用センサ150を詳細に説明する。図17は、フォーカス制御用センサ150の構成を示す概略図である。フォーカス制御用センサ150は、図17に示すように、光源151と、コンデンサーレンズ152と、複数の透過スリットで構成されたパターン板153と、レンズ154と、ミラー155とを有する。更に、フォーカス制御用センサ150は、ミラー156と、レンズ157と、CCDなどの受光素子158とを有する。
【0090】
光源151からの光は、コンデンサーレンズ152を介して集光され、パターン板153を照明する。パターン板153の透過スリットを通過した光は、レンズ154及びミラー155を介してウエハ140に所定の角度で照射される。パターン板153とウエハ140とは、レンズ154を介して結像関係になっているため、パターン板153の透過スリットの空中像がウエハ140上に形成される。
【0091】
ウエハ140で反射された光は、ミラー156及びレンズ157を介して受光素子158で受光され、図17に示すように、パターン板153の各透過スリットに対応したスリット像からなる信号SIが得られる。信号SIの受光素子158での位置ずれを検出することで、ウエハ140のZ軸方向の位置を計測することができる。ウエハ140の表面がZ軸方向の位置w1から位置w2に変化した場合のウエハ140上の光軸シフト量m1は、入射角度をθinとして、m1=2・dZ・tanθinで表すことができる。但し、位置w1から位置w2への変化量をdZとする。
【0092】
例えば、入射角度θinを84度とすると、m1=19・dZとなり、ウエハ140の変位を19倍に拡大した変位量になる。受光素子158での変位量は、m1に光学系の倍率(即ち、レンズ157によるの結像倍率)が掛け合わされる。
【0093】
以下、露光装置100の露光動作(露光装置100を用いた露光方法)について説明する。図18は、露光装置100の露光動作を説明するためのフローチャートである。
【0094】
まず、ステップS1010において、露光装置100にウエハ140を搬入する。
【0095】
次いで、ステップS1020において、ステップS1010で搬入したウエハ140に対して、フォーカス制御用センサ150のフォーカス較正を行うかどうかを判定する。具体的には、ユーザーが露光装置100に予め登録しておいた「ロットの先頭ウエハか」、複数のロットの先頭のウエハであるか、フォーカス精度が厳しく求められる工程のウエハであるか」などの情報に基づいて判定する。
【0096】
ステップS1020において、フォーカス制御用センサ150のフォーカス較正を行わないと判定された場合には、ステップS1050に進み、後述する露光シーケンスが実行される。
【0097】
一方、ステップS1020において、フォーカス制御用センサ150のフォーカス較正を行うと判定された場合には、ステップS1030に進み、基準プレート149によるフォーカス較正シーケンスが実行される。
【0098】
次に、ステップS1040において、ウエハ140によるフォーカス較正シーケンスが実行される。
【0099】
ここで、図19を参照して、ステップS1030及びステップS1040で実行されるフォーカス較正シーケンスについて説明する。図19は、ステップS1030及びステップS1040のフォーカス較正シーケンスの詳細なフローチャートである。
【0100】
基準プレート149によるフォーカス較正シーケンスでは、まず、ウエハステージ145を駆動して、フォーカス制御用センサ150の下に基準プレート149が位置するように位置決めする。なお、基準プレート149は、オプティカルフラットと呼ばれる面精度のよいガラス板などを使用している。また、基準プレート149の表面には、フォーカス制御用センサ150に計測誤差が発生しないように、反射率分布のない均一な領域が設けられており、フォーカス制御用センサ150は、かかる領域を計測する。但し、露光装置100のその他キャリブレーション(例えば、アライメントや投影光学系130の評価)に必要な各種較正用マークを設けたプレートの一部を基準プレート149として使用してもよい。
【0101】
ステップS1031において、基準プレート149をフォーカス制御用センサ150で計測し、基準プレート149のZ軸方向の位置を計測する。
【0102】
ステップS1032において、ステップS1031で計測した基準プレート149のZ軸方向の位置(計測値Om)を露光装置100の記憶部(例えば、制御部160のメモリ等)に格納する。
【0103】
次に、ウエハステージ145を駆動して、計測装置1の下に基準プレート149が位置するように位置決めする。
【0104】
ステップS1033において、基準プレート149を計測装置1で計測し、基準プレート149の表面形状を計測する。なお、計測装置1が計測する基準プレート149の計測領域(XY面)は、ステップS1031でフォーカス制御用センサ150が計測した計測領域と同じにする。
【0105】
ステップS1034において、ステップS1033で計測した基準プレート149の表面形状(計測値Pm)を記憶部に格納する。
【0106】
ステップS1035において、第1のオフセットを算出する。具体的には、図20に示すように、計測装置1による計測値Pmとフォーカス制御用センサ150による計測値Omの差分として、第1のオフセットを算出する。第1のオフセットは、基準プレート149の光学的に均一な面を計測しており、フォーカス制御用センサ150に計測誤差が発生しないため、ゼロになるべきものである。しかしながら、第1のオフセットは、実際には、ウエハステージ145の走査方向のシステム的なオフセット、フォーカス制御用センサ150、或いは、計測装置1の長期的なドリフトなどのエラー要因によってゼロにはならない。従って、第1のオフセットは、定期的に取得(算出)することが好ましい。但し、上述したエラー要因が発生しない場合や別に管理されている場合には、第1のオフセットを1回取得するだけでよい。ここで、図20は、フォーカス較正シーケンスにおける第1のオフセット及び後述する第2のオフセットを説明するための図である。
【0107】
ステップS1031乃至S1035が基準プレート149によるフォーカス較正シーケンスである。
【0108】
ウエハ140によるフォーカス較正シーケンスでは、まず、ウエハステージ145を駆動して、フォーカス制御用センサ150の下にウエハ140が位置するように位置決めする。なお、ウエハ140上の計測位置Wp(ウエハ面内)は、後述する露光シーケンスの計測位置と一致させるものとする。
【0109】
ステップS1041において、ウエハ140上の計測位置Wpをフォーカス制御用センサ150で計測し、計測位置WpのZ方向の位置を計測する。
【0110】
ステップS1042において、ステップS1041で計測したウエハ140上の計測位置WpのZ軸方向の位置(計測値Ow)を記憶部に格納する。
【0111】
次に、ウエハステージ145を駆動して、計測装置1の下にウエハ140上の計測位置Wpが位置するように位置決めする。
【0112】
ステップS1043において、ウエハ140上の計測位置Wpを計測装置1で計測し、ウエハ140上の計測位置Wpの表面形状を計測する。
【0113】
ステップS1044では、ステップS1043で計測したウエハ140上の計測位置Wpの表面形状(計測値Pw)を記憶部に格納する。なお、ウエハ140上の計測点としての計測位置Wpは、ウエハ内の1点、ショット内の1点、ショット内の全点、複数ショット内の全点、ウエハ内の全点などの各種モードから選択できるようになっている。
【0114】
ステップS1045において、第2のオフセットを算出する。具体的には、図20に示すように、計測装置1による計測値Pwとフォーカス制御用センサ150による計測値Owの差分として、第2のオフセットをウエハ140上の計測位置Wp毎に算出する。
【0115】
ステップS1046において、ウエハ140上の計測位置Wp毎に第1のオフセットと第2のオフセットとの差分を求め、かかる差分をオフセットデータとして記憶部に格納する。ウエハ140上の各計測位置におけるオフセット量Opは、Op(i)=[Ow(i)−Pw(i)]−(Om−Pm)から求めることができる。但し、式2において、iは、ウエハ140上の計測位置を示すポイント番号である。
【0116】
オフセット量Opとしては、露光ショット単位(ステッパーの場合はショット単位、スキャナーの場合は露光スリット単位)で、平均的高さオフセット(Z)、平均傾きオフセット(ωz、ωy)を格納してもよい。また、ウエハ140に転写するパターンは、ショット(ダイ)で繰り返されるため、ウエハ140上の各ショットの平均値として、オフセット量Opを求めてもよい。
【0117】
ステップS1041乃至S1046がウエハ140によるフォーカス較正シーケンスである。
【0118】
次に、図21を参照して、フォーカス較正シーケンスS1030及びS1040が終了して実行されるステップS1050の露光シーケンスについて説明する。図21は、ステップS1050の露光シーケンスの詳細なフローチャートである。
【0119】
ステップS1051において、ウエハアライメントを実行する。ウエハアライメントは、図示しないアライメントスコープでウエハ140上のアライメントマークの位置を検出し、露光装置100に対して、ウエハ140のXY平面の位置合わせを行う。
【0120】
ステップS1052において、フォーカス制御用センサ150でウエハ140上の所定領域の面位置を計測する。かかる所定領域は、上述したフォーカス較正シーケンスにおいて計測したウエハ140上の領域を含む。従って、オフセット量Op(i)で、計測値を補正してウエハ140の全面の表面形状を計測する。このように補正されたウエハ140の表面形状のデータが露光装置100の記憶部に格納される。
【0121】
ステップS1053において、ウエハステージ145を駆動して、フォーカス制御用センサ150の下の計測位置から投影光学系130の下の露光位置に第1の露光ショットが位置するようにウエハ140を移動する。この際、ウエハ140の表面形状のデータに基づいて第1の露光ショットの表面形状のデータを作成し、露光像面に対するウエハ140の表面のずれ量が最小になるように、フォーカス(Z方向)及びチルト(傾き方向)を補正する。このようにして、露光スリット単位で最適な露光像面位置にウエハ140の表面を合わせ込む。
【0122】
ステップS1054において、レチクル120のパターンをウエハ140に露光する。この際、露光装置100はスキャナーであるため、レチクル120とウエハ140をY方向(走査方向)に走査することによりレチクル120のパターンをウエハ140上に転写する。
【0123】
ステップS1055において、全ての露光ショットを露光したかどうかを判定する。全ての露光ショットを露光していないと判定された場合には、ステップS1052に戻り、次の露光ショットの表面形状のデータを作成し、フォーカス及びチルトを補正して露光スリット単位で最適な露光像面に合わせ込みながら露光を行う。一方、全ての露光ショットを露光したと判定された場合には、ステップS1056において、露光装置100からウエハ140を搬出する。
【0124】
本実施形態では、各露光ショットを露光する直前に、露光ショットの表面形状のデータの作成、露光像面からのずれ量の算出及びウエハステージ145の駆動量の算出を行っている。但し、第1の露光ショットを露光する前に、全ての露光ショットに関して、表面形状のデータの作成、露光像面からのずれ量の算出、ウエハステージ145の駆動量の算出を行ってもよい。
【0125】
また、ウエハステージ145は、シングルステージに限らず、露光時に使用する露光ステージとウエハ140のアライメントや表面形状を計測する際に使用する計測ステージとの2つのステージを有する、所謂、ツインステージの構成であってもよい。この場合、フォーカス制御用センサ150及び計測装置1は、計測ステージ側に配置することになる。
【0126】
露光装置100において、計測装置1は、上述したように、ウエハの表面形状を高精度に、且つ、再現性よく計測することができる。従って、露光面とウエハ表面とのフォーカス合わせの精度を向上させることが可能となり、デバイスの性能向上や製造歩止まりの向上にも繋がる。従って、露光装置100は、高いスループットで経済性よく高品位なデバイス(半導体素子、LCD素子、撮像素子(CCDなど)、薄膜磁気ヘッドなど)を提供することができる。なお、かかるデバイスは、露光装置100を使用して、感光剤が塗布された基板(ウエハ、ガラスプレート等)を露光する工程と、露光された基板(感光剤)を現像する工程と、他の公知の工程と、を経ることにより製造される。
【0127】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されないことはいうまでもなく、その要旨の範囲内で種々の変形及び変更が可能である。
【特許請求の範囲】
【請求項1】
被計測面の表面形状を計測する計測装置であって、
光源からの光を計測光と参照光とに分離して、前記計測光を前記被計測面の表面に入射させ、前記参照光を参照面に入射させる光学系と、
前記被計測面の表面で反射した前記計測光の光強度と、前記参照面で反射した前記参照光の光強度と、前記被計測面の表面で反射した前記計測光と前記参照面で反射した前記参照光との干渉パターンとを検出する検出部と、
前記検出部によって検出された干渉パターンの干渉信号に基づいて、前記被計測面の表面形状を算出する処理部と、
を有し、
前記処理部は、前記検出部によって検出された前記計測光の光強度、及び、前記参照光の光強度に基づいて、前記検出部によって検出された前記干渉パターンの干渉信号に含まれる前記光源からの光の光量ばらつきによる影響を低減して、前記被計測面の表面形状を算出することを特徴とする計測装置。
【請求項2】
前記処理部は、前記検出部の検出面において、前記計測光のみが入射する領域と、前記参照光のみが入射する領域と、前記計測光及び前記参照光が入射する領域とが存在するように前記被計測面又は前記参照面の位置を制御し、
前記検出部は、前記計測光のみが入射する領域で前記計測光の光強度を、前記参照光のみが入射する領域で前記参照光の光強度を、前記計測光及び前記参照光が入射する領域で前記干渉パターンを検出することを特徴とする請求項1に記載の計測装置。
【請求項3】
前記被計測面及び前記参照面と前記検出部との間に配置され、前記被計測面の表面で反射した前記計測光と前記参照面で反射した前記参照光との合成光を分離する光学素子を更に有することを特徴とする請求項1に記載の計測装置。
【請求項4】
前記干渉パターンの干渉信号をIr(Z)、前記計測光の光強度をM(Z)、前記参照光の光強度R(Z)とすると、
前記処理部は、前記干渉パターンの干渉信号に含まれる前記光源からの光の光量ばらつきによる影響を低減した信号Ir’’(Z)を
の式に従って算出することを特徴とする請求項1乃至3のうちいずれか1項に記載の計測装置。
【請求項5】
前記処理部は、前記干渉パターンの干渉信号をフーリエ変換して位相成分、及び、振幅成分を算出し、前記位相成分、前記振幅成分、前記計測光の光強度、及び、前記参照光の光強度に基づいて、前記干渉パターンの干渉信号に含まれる前記光源からの光の光量ばらつきによる影響を低減した信号を算出することを特徴とする請求項1乃至3のうちいずれか1項に記載の計測装置。
【請求項6】
レチクルを照明する照明光学系と、
前記レチクルのパターンを基板に投影する投影光学系と、
前記基板の表面形状を計測する計測装置と、
前記計測装置によって計測された前記基板の表面形状に基づいて前記基板の位置を調整するステージとを有し、
前記計測装置は、請求項1乃至5のうちいずれか一項に記載の計測装置であることを特徴とする露光装置。
【請求項7】
請求項6に記載の露光装置を用いて基板を露光するステップと、
露光された前記基板を現像するステップと、
を有することを特徴とするデバイスの製造方法。
【請求項1】
被計測面の表面形状を計測する計測装置であって、
光源からの光を計測光と参照光とに分離して、前記計測光を前記被計測面の表面に入射させ、前記参照光を参照面に入射させる光学系と、
前記被計測面の表面で反射した前記計測光の光強度と、前記参照面で反射した前記参照光の光強度と、前記被計測面の表面で反射した前記計測光と前記参照面で反射した前記参照光との干渉パターンとを検出する検出部と、
前記検出部によって検出された干渉パターンの干渉信号に基づいて、前記被計測面の表面形状を算出する処理部と、
を有し、
前記処理部は、前記検出部によって検出された前記計測光の光強度、及び、前記参照光の光強度に基づいて、前記検出部によって検出された前記干渉パターンの干渉信号に含まれる前記光源からの光の光量ばらつきによる影響を低減して、前記被計測面の表面形状を算出することを特徴とする計測装置。
【請求項2】
前記処理部は、前記検出部の検出面において、前記計測光のみが入射する領域と、前記参照光のみが入射する領域と、前記計測光及び前記参照光が入射する領域とが存在するように前記被計測面又は前記参照面の位置を制御し、
前記検出部は、前記計測光のみが入射する領域で前記計測光の光強度を、前記参照光のみが入射する領域で前記参照光の光強度を、前記計測光及び前記参照光が入射する領域で前記干渉パターンを検出することを特徴とする請求項1に記載の計測装置。
【請求項3】
前記被計測面及び前記参照面と前記検出部との間に配置され、前記被計測面の表面で反射した前記計測光と前記参照面で反射した前記参照光との合成光を分離する光学素子を更に有することを特徴とする請求項1に記載の計測装置。
【請求項4】
前記干渉パターンの干渉信号をIr(Z)、前記計測光の光強度をM(Z)、前記参照光の光強度R(Z)とすると、
前記処理部は、前記干渉パターンの干渉信号に含まれる前記光源からの光の光量ばらつきによる影響を低減した信号Ir’’(Z)を
の式に従って算出することを特徴とする請求項1乃至3のうちいずれか1項に記載の計測装置。
【請求項5】
前記処理部は、前記干渉パターンの干渉信号をフーリエ変換して位相成分、及び、振幅成分を算出し、前記位相成分、前記振幅成分、前記計測光の光強度、及び、前記参照光の光強度に基づいて、前記干渉パターンの干渉信号に含まれる前記光源からの光の光量ばらつきによる影響を低減した信号を算出することを特徴とする請求項1乃至3のうちいずれか1項に記載の計測装置。
【請求項6】
レチクルを照明する照明光学系と、
前記レチクルのパターンを基板に投影する投影光学系と、
前記基板の表面形状を計測する計測装置と、
前記計測装置によって計測された前記基板の表面形状に基づいて前記基板の位置を調整するステージとを有し、
前記計測装置は、請求項1乃至5のうちいずれか一項に記載の計測装置であることを特徴とする露光装置。
【請求項7】
請求項6に記載の露光装置を用いて基板を露光するステップと、
露光された前記基板を現像するステップと、
を有することを特徴とするデバイスの製造方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2010−192470(P2010−192470A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−31963(P2009−31963)
【出願日】平成21年2月13日(2009.2.13)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年2月13日(2009.2.13)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]