
計測装置
【課題】計測部分を目視で確認できる計測装置を提供することを目的とする。
【解決手段】本発明に係る計測装置は、プローブ光23を被検物200に向けて走査して照射させる主走査ミラー130および副走査ミラー140と、被検物によって反射された反射プローブ光30とプローブ光との位相差から、被検物の走査領域の立体形状を表す三次元座標を測定する測定手段とを有して構成されている。さらに、この計測装置は、可視光領域の波長を有したマーカー光24を発射するマーカー光源110と、マーカー光を反射するとともにプローブ光を透過するダイクロイックミラー120とを備えており、これらにより、プローブ光とダイクロイックミラーにおいて反射されたマーカー光とを、同一光路上に重ねた状態で走査して被検物に照射する。
【解決手段】本発明に係る計測装置は、プローブ光23を被検物200に向けて走査して照射させる主走査ミラー130および副走査ミラー140と、被検物によって反射された反射プローブ光30とプローブ光との位相差から、被検物の走査領域の立体形状を表す三次元座標を測定する測定手段とを有して構成されている。さらに、この計測装置は、可視光領域の波長を有したマーカー光24を発射するマーカー光源110と、マーカー光を反射するとともにプローブ光を透過するダイクロイックミラー120とを備えており、これらにより、プローブ光とダイクロイックミラーにおいて反射されたマーカー光とを、同一光路上に重ねた状態で走査して被検物に照射する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検物の立体形状を計測する計測装置に関する。
【背景技術】
【0002】
被検物の立体形状を非接触で計測する場合において、光源から発したプローブ光(測定光)を走査しながら被検物に照射し、被検物から反射してくるプローブ光の反射光の位相と、光源からのプローブ光の位相とを比較し、この位相差から被検物の立体形状を表す三次元座標を求めることが知られている(例えば、特許文献1を参照)。
【0003】
【特許文献1】特開2002−116010号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、従来の計測装置では、使用するプローブ光が赤外領域波長であるために、プローブ光が被検物のどの部分に当たっているのかを目視で確認できず、よって、被検物のどの部分を計測しているのかを目視で確認できなかった。
【0005】
以上のような課題に鑑みて、本発明では、被検物の計測部分を目視で確認できる計測装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を解決するために、本発明に係る計測装置は、可視光以外の成分を含む測定光を被検物に向けて走査して照射させる走査手段と、前記被検物によって反射された前記測定光の前記反射に基づく遅延から、前記被検物の走査領域の立体形状を表す三次元座標を測定する測定手段とを有して構成されている。さらに、この計測装置は、可視光領域の波長を有した照明光を照射する照明手段と、前記照明光と前記測定光を合波する合波手段とを備えており、これらの手段により前記測定光と前記合波手段が合波した前記照明光とを、前記被検物に照射する。
【0007】
上記構成の計測装置において、前記合波手段は、ビーム状の前記照明光とビーム状の前記測定光とが重なった状態で、同一光路上を通って前記走査手段に入射するように合波する構成が好ましい。また、上記構成の計測装置において、前記合波手段は、ビーム状の前記照明光およびビーム状の前記測定光のうち、一方を反射し他方を透過する反射透過機能を有することで、反射もしくは透過したビーム状の前記照明光および反射もしくは透過したビーム状の前記測定光が、同一光路上を通って前記走査手段に入射可能となる構成が好ましい。
【0008】
さらに、上記構成の計測装置において、前記合波手段は前記走査手段により走査されたビーム状の前記測定光の、前記被検物に照射されるまでの間の光路中に設けられており、前記合波手段により合波された前記照明光がビーム状の前記測定光と同一光路上を通って、前記被検物に照射される構成が好ましい。また、上記構成の計測装置において、前記合波手段は、前記反射透過機能を有することにより、反射もしくは透過した前記照明光が、反射もしくは透過したビーム状の前記測定光と同一光路上を通って、前記被検物に照射可能となる構成が好ましい。
【0009】
また、上記構成の計測装置において、前記照明手段が照射する前記照明光の前記被検物における照明領域が、ビーム状の前記測定光の前記走査領域と重なるように、前記照明光が照射される構成が好ましい。
【発明の効果】
【0010】
本発明に関する計測装置によれば、プローブ光(測定光)が走査している被検物の表面部分に、可視光である照明光が照射されることから、被検物の表面上に照射されたこの照明光の位置を確認することにより、プローブ光が被検物のどの部分を走査しているのかを目視で確認可能となる。
【発明を実施するための最良の形態】
【0011】
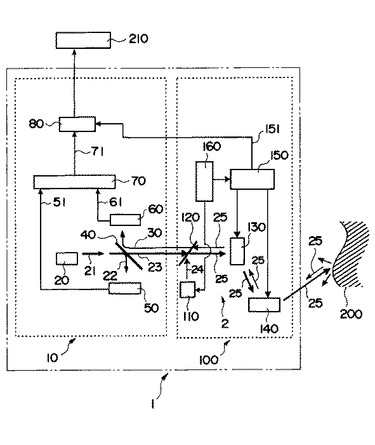
以下、本発明に係る計測装置1の好ましい実施の形態について、図を参照して説明する。説明の便宜上、図2および図4に示す矢印の方向をXYZ方向として定義する。計測装置1は、図1および図3のブロック図に示すように、破線で囲まれた測定部10と走査部100とを有して構成され、計測装置1で計測されて演算された被検物200の立体形状が、ディスプレイ210に出力表示されるようになっている。
【実施例1】
【0012】
まず、測定部10の構成について図1を用いて説明する。測定部10は、レーザー光源20、ビームスプリッタ40、2つのフォトディテクタ50および60、位相計70および演算回路80から構成される。レーザー光源20は、ビームスプリッタ40に向けて、赤外領域波長を有した非可視光からなるビーム状のレーザー光21を、フェムト秒(10−15秒)オーダーの短い間隔で、連続して発射可能な機能を有する光源である。ビームスプリッタ40は、入射する光を任意の割合で透過および反射させる機能を有するハーフミラーで、上記レーザー光21の進行光路上に、レーザー光21に対して45度傾斜させて設置することで、レーザー光21の一部はビームスプリッタ40の表面で反射されて、入射光に対して90度曲がった方向に出射する基準光22となるとともに、残りは透過してプローブ光(測定光)23となる。
【0013】
フォトディテクタ50は、入射する光を電気信号に変換する機能を有した装置であり、ビームスプリッタ40の表面で反射された基準光22を入射させて受光する位置に配置されている。フォトディテクタ60は、フォトディテクタ50と同様の機能を有した装置で、後述する反射プローブ光30を入射させて受光する位置に配置されており、さらに、フォトディテクタ50とフォトディテクタ60は、それぞれレーザー光21の光軸に関して対称となる位置に配置されている。
【0014】
位相計70は、フォトディテクタ50で変換された電気信号51と、フォトディテクタ60で変換された電気信号61とが入力されて、電気信号51と電気信号61との位相差を求め、後述するZ方向データ71を算出する機能を有した演算装置である。演算回路80は、位相計70で算出されたZ方向データ71と、後述する走査回路150で算出されたXY位置データ151とが入力されることで、被検物200の表面の立体形状を表す三次元データを演算し、これをディスプレイ210に出力する回路である。
【0015】
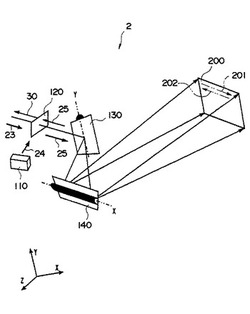
次に、走査部100の構成について説明する。この走査部100の走査部光学系2を立体的に示したものが図2である。走査部100は、図1に示すように、マーカー光源110、ダイクロイックミラー120、主走査ミラー130、副走査ミラー140、走査回路150および制御回路160から構成される。マーカー光源110は、可視領域波長を有するビーム状のマーカー光24を出射する装置であり、後述するダイクロイックミラー120の表面上に、プローブ光23が入射して透過する際の透過点に向けて、光路がプローブ光(測定光)23と一致するように、マーカー光24を出射する構成となっている。
【0016】
ダイクロイックミラー120は、入射する光を波長に応じて反射もしくは透過させる機能を有するミラーで、この実施例1においては、非可視領域波長を有するプローブ光23を透過し、可視領域波長を有するマーカー光24を反射するように構成されており、さらに、ビームスプリッタ40を透過したプローブ光23の進行光路上に、プローブ光23に対して45度傾斜した状態で設置されている。このように設置することにより、プローブ光23はダイクロイックミラー120を透過するとともに、上記マーカー光24は、ダイクロイックミラー120の表面で反射し、入射光に対して90度曲がった方向に出射した後、ダイクロイックミラー120を透過したプローブ光23と、光路が一致した状態で同じ方向に進行し、主走査ミラー130に入射する構成となっている。
【0017】
主走査ミラー130は、Y軸方向を中心として回転振動するガルバノミラーであり、Y軸方向を中心として回転振動することによって、同一光路を進行して入射するプローブ光(測定光)23とマーカー光24(以下、合成光25と呼ぶ)とが、被検物200上でX軸方向に往復走査されるようになっている。一方、副走査ミラー140は、X軸方向を中心として回転振動するガルバノミラーであり、X軸方向を中心として回転振動することによって、主走査ミラー130によって走査されて入射した合成光25が、被検物200上でY軸方向に往復走査されるようになっている。
【0018】
上記副走査ミラー140において、走査された合成光25は被検物200の表面に照射され、その照射された合成光25は被検物200の表面で拡散反射するが、拡散反射した合成光25のうち、反射して180度進行方向を変えて返ってきた合成光25は副走査ミラー140に入射し、さらに、主走査ミラー130に進行するとともに、ダイクロイックミラー120に入射する。このとき、ダイクロイックミラー120において、マーカー光24は反射除去されるとともに、プローブ光23は透過して反射プローブ光30を形成する。この反射プローブ光30は、上記のように走査部光学系2を、被検物200に向かう合成光25と同一光路を逆方向に進行した後、ビームスプリッタ40で反射し、入射光に対して90度曲がった方向に出射して、フォトディテクタ60に入射し受光される。
【0019】
走査回路150は、主走査ミラー130および副走査ミラー140の回転振動を制御するとともに、各ミラー130、140の回転角度を検出することによって、走査された合成光25が向かう被検物200における走査領域のXY平面上での位置を算出し、この算出結果をXY位置データ151として演算回路80に送る機能を有する回路である。制御回路160は、マーカー光源110および走査回路150の動作を制御する回路である。
【0020】
以上が、各構成部の説明であるが、以下に、被検物200の立体形状を表す三次元データの算出方法について説明する。まず、主走査ミラー130および副走査ミラー140による、プローブ光23の走査方法を簡単に説明する。主走査ミラー130および副走査ミラー140は、それぞれが独立して回転振動することで走査領域全体を走査でき、例えば図2に示すように、被検物200の表面上を、まず二点破線201のようにX軸の負方向から正方向へ走査するように、副走査ミラー140を固定した状態で、主走査ミラー130を回転振動させる。そして、走査領域のX軸正方向の端部を走査した後、副走査ミラー140を回転振動させることでY軸の負方向へ走査領域を移動させ、二点破線202のようにX軸の正方向から負方向へ走査するように、主走査ミラー130を回転振動させる。
【0021】
上記の動作を繰り返すことで得られた、被検物200表面の各走査位置における、基準光22およびその基準光22に対応する反射プローブ光30は、フォトディテクタ50において基準光22が電気信号51に変換され、フォトディテクタ60において上記の基準光22に対応する反射プローブ光30が電気信号61に変換される。これらの電気信号51、61は位相計70に送られて、電気信号51と61との位相差から、被検物200表面におけるZ軸方向の凹凸を表すZ方向データ71を算出し、これを演算回路80に送る。
【0022】
ここで、上記Z方向データ71の求め方について簡単に説明すると、反射プローブ光30がフォトディテクタ60に達するには基準光22対して、ビームスプリッタ40から被検物200表面の走査領域までを往復する分だけ時間がかかるため、反射プローブ光30と基準光22は、上記時間分だけ位相がずれることになる。そこで、上記位相のずれから時間を算出し、時間と光の速度との関係よりビームスプリッタ40から被検物200表面の走査領域までの往復距離が算出されることによって、Z方向データ71が求められる。
【0023】
このように、実施例1に係る計測装置1は、ビーム状のマーカー光24とビーム状のプローブ光23とを同一光路上に重ね合わせた状態で、主走査ミラー130および副走査ミラー140に入射させて走査した後に被検物200の表面に照射されるので、被検物200の表面におけるプローブ光23の走査領域は、常に可視光であるマーカー光24で照らされて目視可能となる。さらに、主走査ミラー130および副走査ミラー140は、被検物200の表面における走査領域全体を1秒間に約30回走査するように回転振動する構成となっているので、この走査領域全体が1秒間に約30回ずつマーカー光24で照らされることになり、目視で確認する場合には、この走査領域全体がマーカー光24によって照らされているように見えるため、走査領域全体を目視で確認可能となる。
【実施例2】
【0024】
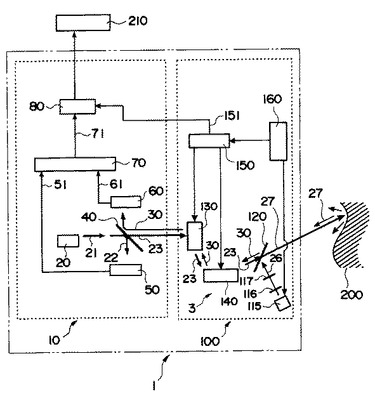
実施例2は、実施例1と比較して走査部100の走査部光学系3の構成が異なっており(図1および図3を参照)、実施例1と共通している測定部10および立体形状の算出方法についての説明は省略し、以下に実施例2に係る走査部光学系3の構成を中心に説明する。
【0025】
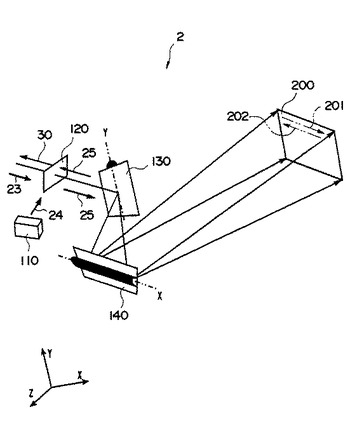
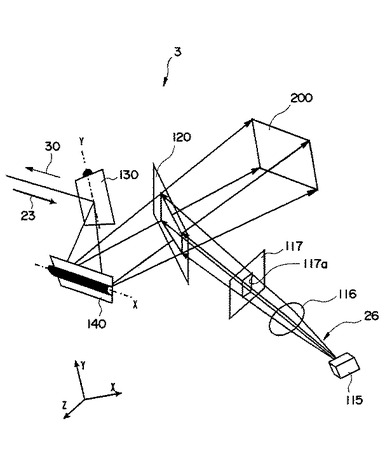
走査部光学系3は、図3および図4に示すように、LED光源115、投影レンズ116、マスク117、ダイクロイックミラー120、主走査ミラー130および副走査ミラー140から構成される。LED光源115は、可視領域波長を有するLEDマーカー光26を発射する光源で、ダイクロイックミラー120の表面上における、プローブ光23が入射して透過する際の透過点に向けてLEDマーカー光26を発射するように構成されている。投影レンズ116は、LED光源115から発射されたLEDマーカー光26を集光する機能を有する。矩形状のマスク117は、その中央部に開口した矩形状のスリット117aを有し、投影レンズ116で集光されたLEDマーカー光26が、スリット117aを通過することで矩形状に整形されて、ダイクロイックミラー120に進行するように構成されている。
【0026】
ダイクロイックミラー120は、入射する光をその波長に応じて反射もしくは透過させる機能を有するミラーで、この実施例2においては、非可視領域波長を有するプローブ光23は透過し、可視領域波長を有するLEDマーカー光26を反射するように構成されている。また、ダイクロイックミラー120は、副走査ミラー140で走査されたプローブ光23が、被検物200に照射されるまでの光路途中に設置されて、プローブ光23はダイクロイックミラー120を透過するとともに、LEDマーカー光26はダイクロイックミラー120の表面で反射し、入射光に対して90度曲がった方向に出射し、ダイクロイックミラー120を透過したプローブ光23と光路がほぼ一致した状態で、被検物200の表面に向かって進行する。つまり、LEDマーカー光26は、主走査ミラー130および副走査ミラー140の回転振動に影響されず、常に被検物200に照射可能となっている。ここで、光路がほぼ一致した状態で、被検物200の表面に向かって進行するプローブ光23とLEDマーカー光26を、合成光27としておく。
【0027】
また、矩形状に整形されたLEDマーカー光26が、ダイクロイックミラー120の表面で反射された後、ダイクロイックミラー120を透過したプローブ光23とほぼ同じ光路を進行するように、LED光源115、投影レンズ116、マスク117およびダイクロイックミラー120が配置される。さらに、ダイクロイックミラー120の表面で反射されたLEDマーカー光26が、被検物200の表面におけるプローブ光23の走査領域全体を照射可能となるように、投影レンズ116およびマスク117において、LEDマーカー光26の照射領域が拡大および整形されている。
【0028】
主走査ミラー130は、Y軸方向を中心として回転振動するガルバノミラーであり、Y軸方向を中心として回転振動することによって、測定部1のビームスプリッタ40を透過して進行するプローブ光23が、被検物200上でX軸方向に往復走査されるようになっている。一方、副走査ミラー140は、X軸方向を中心として回転振動するガルバノミラーであり、X軸方向を中心として回転振動することによって、主走査ミラー130によって走査されて入射したプローブ光23が、被検物200上でY軸方向に往復走査されるようになっている。
【0029】
被検物200表面に照射された合成光27は、被検物200表面で拡散反射するが、拡散反射した合成光27のうち反射して180度進行方向を変えて返ってきた合成光27は、ダイクロイックミラー120に入射する。このとき、ダイクロイックミラー120において、合成光27のうちでLEDマーカー光26は反射除去されるとともに、プローブ光23は透過して反射プローブ光30が形成される。この反射プローブ光30は、走査部光学系3を被検物200に向かうプローブ光23と同一光路を逆方向に進行した後、ビームスプリッタ40で反射し、入射光に対して90度曲がった方向に出射して、フォトディテクタ60に入射する。
【0030】
このように、実施例2に係る計測装置1は、副走査ミラー140と被検物200との間における、プローブ光23の光路上にダイクロイックミラー120を設置するとともに、被検物200表面の走査領域全体を照射可能な面積を有したLEDマーカー光26を、ダイクロイックミラー120の表面で反射するように構成されている。このことにより、被検物200表面の走査領域全体は、可視光のLEDマーカー光26で照らされるので、走査領域全体が目視で確認可能となる。
【0031】
上述の第1実施例において、ダイクロイックミラー120はプローブ光23を反射し、マーカー光24を透過させることで、合成光25を構成しても良い。
【0032】
上述の第2実施例において、ダイクロイックミラー120はプローブ光23を反射し、LEDマーカー光26を透過させて、それらを被検物200表面に照射するように構成しても良い。
【0033】
上述の第2実施例において、マスク117およびスリット117aの形状は、矩形状に限定されるものではなく、被検物200表面上におけるLEDマーカー光26の照射領域等に支障がなければ、他の形状で構成しても良い。
【図面の簡単な説明】
【0034】
【図1】第1実施例の計測装置の構成を示すブロック図である。
【図2】第1実施例の走査部光学系を示す斜視図である。
【図3】第2実施例の計測装置の構成を示すブロック図である。
【図4】第2実施例の走査部光学系を示す斜視図である。
【符号の説明】
【0035】
1 計測装置 23 プローブ光(測定光)
24 マーカー光(照明光) 26 LEDマーカー光(照明光)
30 反射プローブ光 110 マーカー光源(照明手段)
115 LEDマーカー光源(照明手段) 120 ダイクロイックミラー(合波手段)
130 主走査ミラー(走査手段) 140 副走査ミラー(走査手段)
200 被検物
【技術分野】
【0001】
本発明は、被検物の立体形状を計測する計測装置に関する。
【背景技術】
【0002】
被検物の立体形状を非接触で計測する場合において、光源から発したプローブ光(測定光)を走査しながら被検物に照射し、被検物から反射してくるプローブ光の反射光の位相と、光源からのプローブ光の位相とを比較し、この位相差から被検物の立体形状を表す三次元座標を求めることが知られている(例えば、特許文献1を参照)。
【0003】
【特許文献1】特開2002−116010号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、従来の計測装置では、使用するプローブ光が赤外領域波長であるために、プローブ光が被検物のどの部分に当たっているのかを目視で確認できず、よって、被検物のどの部分を計測しているのかを目視で確認できなかった。
【0005】
以上のような課題に鑑みて、本発明では、被検物の計測部分を目視で確認できる計測装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を解決するために、本発明に係る計測装置は、可視光以外の成分を含む測定光を被検物に向けて走査して照射させる走査手段と、前記被検物によって反射された前記測定光の前記反射に基づく遅延から、前記被検物の走査領域の立体形状を表す三次元座標を測定する測定手段とを有して構成されている。さらに、この計測装置は、可視光領域の波長を有した照明光を照射する照明手段と、前記照明光と前記測定光を合波する合波手段とを備えており、これらの手段により前記測定光と前記合波手段が合波した前記照明光とを、前記被検物に照射する。
【0007】
上記構成の計測装置において、前記合波手段は、ビーム状の前記照明光とビーム状の前記測定光とが重なった状態で、同一光路上を通って前記走査手段に入射するように合波する構成が好ましい。また、上記構成の計測装置において、前記合波手段は、ビーム状の前記照明光およびビーム状の前記測定光のうち、一方を反射し他方を透過する反射透過機能を有することで、反射もしくは透過したビーム状の前記照明光および反射もしくは透過したビーム状の前記測定光が、同一光路上を通って前記走査手段に入射可能となる構成が好ましい。
【0008】
さらに、上記構成の計測装置において、前記合波手段は前記走査手段により走査されたビーム状の前記測定光の、前記被検物に照射されるまでの間の光路中に設けられており、前記合波手段により合波された前記照明光がビーム状の前記測定光と同一光路上を通って、前記被検物に照射される構成が好ましい。また、上記構成の計測装置において、前記合波手段は、前記反射透過機能を有することにより、反射もしくは透過した前記照明光が、反射もしくは透過したビーム状の前記測定光と同一光路上を通って、前記被検物に照射可能となる構成が好ましい。
【0009】
また、上記構成の計測装置において、前記照明手段が照射する前記照明光の前記被検物における照明領域が、ビーム状の前記測定光の前記走査領域と重なるように、前記照明光が照射される構成が好ましい。
【発明の効果】
【0010】
本発明に関する計測装置によれば、プローブ光(測定光)が走査している被検物の表面部分に、可視光である照明光が照射されることから、被検物の表面上に照射されたこの照明光の位置を確認することにより、プローブ光が被検物のどの部分を走査しているのかを目視で確認可能となる。
【発明を実施するための最良の形態】
【0011】
以下、本発明に係る計測装置1の好ましい実施の形態について、図を参照して説明する。説明の便宜上、図2および図4に示す矢印の方向をXYZ方向として定義する。計測装置1は、図1および図3のブロック図に示すように、破線で囲まれた測定部10と走査部100とを有して構成され、計測装置1で計測されて演算された被検物200の立体形状が、ディスプレイ210に出力表示されるようになっている。
【実施例1】
【0012】
まず、測定部10の構成について図1を用いて説明する。測定部10は、レーザー光源20、ビームスプリッタ40、2つのフォトディテクタ50および60、位相計70および演算回路80から構成される。レーザー光源20は、ビームスプリッタ40に向けて、赤外領域波長を有した非可視光からなるビーム状のレーザー光21を、フェムト秒(10−15秒)オーダーの短い間隔で、連続して発射可能な機能を有する光源である。ビームスプリッタ40は、入射する光を任意の割合で透過および反射させる機能を有するハーフミラーで、上記レーザー光21の進行光路上に、レーザー光21に対して45度傾斜させて設置することで、レーザー光21の一部はビームスプリッタ40の表面で反射されて、入射光に対して90度曲がった方向に出射する基準光22となるとともに、残りは透過してプローブ光(測定光)23となる。
【0013】
フォトディテクタ50は、入射する光を電気信号に変換する機能を有した装置であり、ビームスプリッタ40の表面で反射された基準光22を入射させて受光する位置に配置されている。フォトディテクタ60は、フォトディテクタ50と同様の機能を有した装置で、後述する反射プローブ光30を入射させて受光する位置に配置されており、さらに、フォトディテクタ50とフォトディテクタ60は、それぞれレーザー光21の光軸に関して対称となる位置に配置されている。
【0014】
位相計70は、フォトディテクタ50で変換された電気信号51と、フォトディテクタ60で変換された電気信号61とが入力されて、電気信号51と電気信号61との位相差を求め、後述するZ方向データ71を算出する機能を有した演算装置である。演算回路80は、位相計70で算出されたZ方向データ71と、後述する走査回路150で算出されたXY位置データ151とが入力されることで、被検物200の表面の立体形状を表す三次元データを演算し、これをディスプレイ210に出力する回路である。
【0015】
次に、走査部100の構成について説明する。この走査部100の走査部光学系2を立体的に示したものが図2である。走査部100は、図1に示すように、マーカー光源110、ダイクロイックミラー120、主走査ミラー130、副走査ミラー140、走査回路150および制御回路160から構成される。マーカー光源110は、可視領域波長を有するビーム状のマーカー光24を出射する装置であり、後述するダイクロイックミラー120の表面上に、プローブ光23が入射して透過する際の透過点に向けて、光路がプローブ光(測定光)23と一致するように、マーカー光24を出射する構成となっている。
【0016】
ダイクロイックミラー120は、入射する光を波長に応じて反射もしくは透過させる機能を有するミラーで、この実施例1においては、非可視領域波長を有するプローブ光23を透過し、可視領域波長を有するマーカー光24を反射するように構成されており、さらに、ビームスプリッタ40を透過したプローブ光23の進行光路上に、プローブ光23に対して45度傾斜した状態で設置されている。このように設置することにより、プローブ光23はダイクロイックミラー120を透過するとともに、上記マーカー光24は、ダイクロイックミラー120の表面で反射し、入射光に対して90度曲がった方向に出射した後、ダイクロイックミラー120を透過したプローブ光23と、光路が一致した状態で同じ方向に進行し、主走査ミラー130に入射する構成となっている。
【0017】
主走査ミラー130は、Y軸方向を中心として回転振動するガルバノミラーであり、Y軸方向を中心として回転振動することによって、同一光路を進行して入射するプローブ光(測定光)23とマーカー光24(以下、合成光25と呼ぶ)とが、被検物200上でX軸方向に往復走査されるようになっている。一方、副走査ミラー140は、X軸方向を中心として回転振動するガルバノミラーであり、X軸方向を中心として回転振動することによって、主走査ミラー130によって走査されて入射した合成光25が、被検物200上でY軸方向に往復走査されるようになっている。
【0018】
上記副走査ミラー140において、走査された合成光25は被検物200の表面に照射され、その照射された合成光25は被検物200の表面で拡散反射するが、拡散反射した合成光25のうち、反射して180度進行方向を変えて返ってきた合成光25は副走査ミラー140に入射し、さらに、主走査ミラー130に進行するとともに、ダイクロイックミラー120に入射する。このとき、ダイクロイックミラー120において、マーカー光24は反射除去されるとともに、プローブ光23は透過して反射プローブ光30を形成する。この反射プローブ光30は、上記のように走査部光学系2を、被検物200に向かう合成光25と同一光路を逆方向に進行した後、ビームスプリッタ40で反射し、入射光に対して90度曲がった方向に出射して、フォトディテクタ60に入射し受光される。
【0019】
走査回路150は、主走査ミラー130および副走査ミラー140の回転振動を制御するとともに、各ミラー130、140の回転角度を検出することによって、走査された合成光25が向かう被検物200における走査領域のXY平面上での位置を算出し、この算出結果をXY位置データ151として演算回路80に送る機能を有する回路である。制御回路160は、マーカー光源110および走査回路150の動作を制御する回路である。
【0020】
以上が、各構成部の説明であるが、以下に、被検物200の立体形状を表す三次元データの算出方法について説明する。まず、主走査ミラー130および副走査ミラー140による、プローブ光23の走査方法を簡単に説明する。主走査ミラー130および副走査ミラー140は、それぞれが独立して回転振動することで走査領域全体を走査でき、例えば図2に示すように、被検物200の表面上を、まず二点破線201のようにX軸の負方向から正方向へ走査するように、副走査ミラー140を固定した状態で、主走査ミラー130を回転振動させる。そして、走査領域のX軸正方向の端部を走査した後、副走査ミラー140を回転振動させることでY軸の負方向へ走査領域を移動させ、二点破線202のようにX軸の正方向から負方向へ走査するように、主走査ミラー130を回転振動させる。
【0021】
上記の動作を繰り返すことで得られた、被検物200表面の各走査位置における、基準光22およびその基準光22に対応する反射プローブ光30は、フォトディテクタ50において基準光22が電気信号51に変換され、フォトディテクタ60において上記の基準光22に対応する反射プローブ光30が電気信号61に変換される。これらの電気信号51、61は位相計70に送られて、電気信号51と61との位相差から、被検物200表面におけるZ軸方向の凹凸を表すZ方向データ71を算出し、これを演算回路80に送る。
【0022】
ここで、上記Z方向データ71の求め方について簡単に説明すると、反射プローブ光30がフォトディテクタ60に達するには基準光22対して、ビームスプリッタ40から被検物200表面の走査領域までを往復する分だけ時間がかかるため、反射プローブ光30と基準光22は、上記時間分だけ位相がずれることになる。そこで、上記位相のずれから時間を算出し、時間と光の速度との関係よりビームスプリッタ40から被検物200表面の走査領域までの往復距離が算出されることによって、Z方向データ71が求められる。
【0023】
このように、実施例1に係る計測装置1は、ビーム状のマーカー光24とビーム状のプローブ光23とを同一光路上に重ね合わせた状態で、主走査ミラー130および副走査ミラー140に入射させて走査した後に被検物200の表面に照射されるので、被検物200の表面におけるプローブ光23の走査領域は、常に可視光であるマーカー光24で照らされて目視可能となる。さらに、主走査ミラー130および副走査ミラー140は、被検物200の表面における走査領域全体を1秒間に約30回走査するように回転振動する構成となっているので、この走査領域全体が1秒間に約30回ずつマーカー光24で照らされることになり、目視で確認する場合には、この走査領域全体がマーカー光24によって照らされているように見えるため、走査領域全体を目視で確認可能となる。
【実施例2】
【0024】
実施例2は、実施例1と比較して走査部100の走査部光学系3の構成が異なっており(図1および図3を参照)、実施例1と共通している測定部10および立体形状の算出方法についての説明は省略し、以下に実施例2に係る走査部光学系3の構成を中心に説明する。
【0025】
走査部光学系3は、図3および図4に示すように、LED光源115、投影レンズ116、マスク117、ダイクロイックミラー120、主走査ミラー130および副走査ミラー140から構成される。LED光源115は、可視領域波長を有するLEDマーカー光26を発射する光源で、ダイクロイックミラー120の表面上における、プローブ光23が入射して透過する際の透過点に向けてLEDマーカー光26を発射するように構成されている。投影レンズ116は、LED光源115から発射されたLEDマーカー光26を集光する機能を有する。矩形状のマスク117は、その中央部に開口した矩形状のスリット117aを有し、投影レンズ116で集光されたLEDマーカー光26が、スリット117aを通過することで矩形状に整形されて、ダイクロイックミラー120に進行するように構成されている。
【0026】
ダイクロイックミラー120は、入射する光をその波長に応じて反射もしくは透過させる機能を有するミラーで、この実施例2においては、非可視領域波長を有するプローブ光23は透過し、可視領域波長を有するLEDマーカー光26を反射するように構成されている。また、ダイクロイックミラー120は、副走査ミラー140で走査されたプローブ光23が、被検物200に照射されるまでの光路途中に設置されて、プローブ光23はダイクロイックミラー120を透過するとともに、LEDマーカー光26はダイクロイックミラー120の表面で反射し、入射光に対して90度曲がった方向に出射し、ダイクロイックミラー120を透過したプローブ光23と光路がほぼ一致した状態で、被検物200の表面に向かって進行する。つまり、LEDマーカー光26は、主走査ミラー130および副走査ミラー140の回転振動に影響されず、常に被検物200に照射可能となっている。ここで、光路がほぼ一致した状態で、被検物200の表面に向かって進行するプローブ光23とLEDマーカー光26を、合成光27としておく。
【0027】
また、矩形状に整形されたLEDマーカー光26が、ダイクロイックミラー120の表面で反射された後、ダイクロイックミラー120を透過したプローブ光23とほぼ同じ光路を進行するように、LED光源115、投影レンズ116、マスク117およびダイクロイックミラー120が配置される。さらに、ダイクロイックミラー120の表面で反射されたLEDマーカー光26が、被検物200の表面におけるプローブ光23の走査領域全体を照射可能となるように、投影レンズ116およびマスク117において、LEDマーカー光26の照射領域が拡大および整形されている。
【0028】
主走査ミラー130は、Y軸方向を中心として回転振動するガルバノミラーであり、Y軸方向を中心として回転振動することによって、測定部1のビームスプリッタ40を透過して進行するプローブ光23が、被検物200上でX軸方向に往復走査されるようになっている。一方、副走査ミラー140は、X軸方向を中心として回転振動するガルバノミラーであり、X軸方向を中心として回転振動することによって、主走査ミラー130によって走査されて入射したプローブ光23が、被検物200上でY軸方向に往復走査されるようになっている。
【0029】
被検物200表面に照射された合成光27は、被検物200表面で拡散反射するが、拡散反射した合成光27のうち反射して180度進行方向を変えて返ってきた合成光27は、ダイクロイックミラー120に入射する。このとき、ダイクロイックミラー120において、合成光27のうちでLEDマーカー光26は反射除去されるとともに、プローブ光23は透過して反射プローブ光30が形成される。この反射プローブ光30は、走査部光学系3を被検物200に向かうプローブ光23と同一光路を逆方向に進行した後、ビームスプリッタ40で反射し、入射光に対して90度曲がった方向に出射して、フォトディテクタ60に入射する。
【0030】
このように、実施例2に係る計測装置1は、副走査ミラー140と被検物200との間における、プローブ光23の光路上にダイクロイックミラー120を設置するとともに、被検物200表面の走査領域全体を照射可能な面積を有したLEDマーカー光26を、ダイクロイックミラー120の表面で反射するように構成されている。このことにより、被検物200表面の走査領域全体は、可視光のLEDマーカー光26で照らされるので、走査領域全体が目視で確認可能となる。
【0031】
上述の第1実施例において、ダイクロイックミラー120はプローブ光23を反射し、マーカー光24を透過させることで、合成光25を構成しても良い。
【0032】
上述の第2実施例において、ダイクロイックミラー120はプローブ光23を反射し、LEDマーカー光26を透過させて、それらを被検物200表面に照射するように構成しても良い。
【0033】
上述の第2実施例において、マスク117およびスリット117aの形状は、矩形状に限定されるものではなく、被検物200表面上におけるLEDマーカー光26の照射領域等に支障がなければ、他の形状で構成しても良い。
【図面の簡単な説明】
【0034】
【図1】第1実施例の計測装置の構成を示すブロック図である。
【図2】第1実施例の走査部光学系を示す斜視図である。
【図3】第2実施例の計測装置の構成を示すブロック図である。
【図4】第2実施例の走査部光学系を示す斜視図である。
【符号の説明】
【0035】
1 計測装置 23 プローブ光(測定光)
24 マーカー光(照明光) 26 LEDマーカー光(照明光)
30 反射プローブ光 110 マーカー光源(照明手段)
115 LEDマーカー光源(照明手段) 120 ダイクロイックミラー(合波手段)
130 主走査ミラー(走査手段) 140 副走査ミラー(走査手段)
200 被検物
【特許請求の範囲】
【請求項1】
可視光以外の成分を含む測定光を被検物に向けて走査して照射させる走査手段と、
前記被検物によって反射された前記測定光の前記反射に基づく遅延から、前記被検物の走査領域の立体形状を表す三次元座標を測定する測定手段とを有する計測装置において、
可視光領域の波長を有した照明光を照射する照明手段と、
前記照明光と前記測定光を合波する合波手段とを有し、
前記測定光と前記合波手段が合波した前記照明光とを、前記被検物に照射することを特徴とする計測装置。
【請求項2】
前記合波手段は、ビーム状の前記照明光とビーム状の前記測定光とを、同一光路上を通って前記走査手段に入射させるように合波することを特徴とする請求項1に記載の計測装置。
【請求項3】
前記合波手段は、ビーム状の前記照明光およびビーム状の前記測定光のうち、一方を反射し他方を透過する反射透過機能を有することで、反射もしくは透過したビーム状の前記照明光および反射もしくは透過したビーム状の前記測定光が、同一光路上を通って前記走査手段に入射することを特徴とする請求項2に記載の計測装置。
【請求項4】
前記合波手段は、前記走査手段により走査されたビーム状の前記測定光の、前記被検物に照射されるまでの間の光路中に設けられて、合波された前記照明光がビーム状の前記測定光と同一光路上を通って、前記被検物に照射されることを特徴とする、請求項1に記載の計測装置。
【請求項5】
前記合波手段は、前記反射透過機能を有することにより、反射もしくは透過した前記照明光が、反射もしくは透過したビーム状の前記測定光と同一光路上を通って前記被検物に照射されることを特徴とする、請求項4に記載の計測装置。
【請求項6】
前記照明手段が照射する前記照明光の照明領域が、ビーム状の前記測定光の前記走査領域と重なるように、前記照明光が照射されることを特徴とする請求項4または5に記載の計測装置。
【請求項1】
可視光以外の成分を含む測定光を被検物に向けて走査して照射させる走査手段と、
前記被検物によって反射された前記測定光の前記反射に基づく遅延から、前記被検物の走査領域の立体形状を表す三次元座標を測定する測定手段とを有する計測装置において、
可視光領域の波長を有した照明光を照射する照明手段と、
前記照明光と前記測定光を合波する合波手段とを有し、
前記測定光と前記合波手段が合波した前記照明光とを、前記被検物に照射することを特徴とする計測装置。
【請求項2】
前記合波手段は、ビーム状の前記照明光とビーム状の前記測定光とを、同一光路上を通って前記走査手段に入射させるように合波することを特徴とする請求項1に記載の計測装置。
【請求項3】
前記合波手段は、ビーム状の前記照明光およびビーム状の前記測定光のうち、一方を反射し他方を透過する反射透過機能を有することで、反射もしくは透過したビーム状の前記照明光および反射もしくは透過したビーム状の前記測定光が、同一光路上を通って前記走査手段に入射することを特徴とする請求項2に記載の計測装置。
【請求項4】
前記合波手段は、前記走査手段により走査されたビーム状の前記測定光の、前記被検物に照射されるまでの間の光路中に設けられて、合波された前記照明光がビーム状の前記測定光と同一光路上を通って、前記被検物に照射されることを特徴とする、請求項1に記載の計測装置。
【請求項5】
前記合波手段は、前記反射透過機能を有することにより、反射もしくは透過した前記照明光が、反射もしくは透過したビーム状の前記測定光と同一光路上を通って前記被検物に照射されることを特徴とする、請求項4に記載の計測装置。
【請求項6】
前記照明手段が照射する前記照明光の照明領域が、ビーム状の前記測定光の前記走査領域と重なるように、前記照明光が照射されることを特徴とする請求項4または5に記載の計測装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−256497(P2008−256497A)
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願番号】特願2007−98194(P2007−98194)
【出願日】平成19年4月4日(2007.4.4)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願日】平成19年4月4日(2007.4.4)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]