
計測装置
【課題】簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検面の位置又は形状を計測する計測装置に関する。
【背景技術】
【0002】
形状等を高精度に計測する装置として一般的に干渉計測装置が知られている。単波長の光を用いる干渉計測装置では、被検面に計測光の波長の半分以上の段差がある場合には段差の高低差の判別ができない為、被検面の形状等を計測できない。更に被検面が粗さを持つ場合、表面粗さに起因するスペックルパターンは2πより大きい標準偏差のランダム位相を有する為、単波長の光を用いる干渉計測装置では計測不確さが大きくなってしまう。
【0003】
これらの問題を解決する為に、複数の異なる波長で干渉計測し各波長の位相を合成する干渉計測装置が知られている。例えば、2つの異なる波長λ1、λ2(λ1>λ2)を用いる場合、その合成波長Λ=λ1×λ2/(λ1−λ2)の半分までの段差が計測可能となり単波長の光のみを用いる干渉計測装置と比較して計測レンジの拡大が可能となる。合成波長の光を用いる干渉計測装置は、特許文献1、2にて開示されている。特許文献1では、多重モードレーザを光源に用い、複数の波長を同時に干渉させ回折格子にて波長分離して波長毎に位相検出を行う。特許文献2では、複数の波長を同時に発振するレーザ光源を用い、複数の波長を同時に干渉させダイクロイックミラーにて波長分離して波長毎に位相検出を行う。
【0004】
一方、非特許文献1によると、2つの波長のスペックルに相関があるならば、その2つの波長の位相差は巨視的表面プロファイルと微視的表面粗さに関する情報が得られるとしている。更に2つの波長のスペックルの相関は、合成波長に依存し、合成波長が小さい程減少し、逆に合成波長が大きいと増加する。このことから, 単波長の光を用いる干渉計測装置では困難である粗面を有する被検物においても、多波長の光を用いる干渉計測装置では精度良く計測することが可能となる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−52540号公報
【特許文献2】特開平10−281738号公報
【非特許文献】
【0006】
【非特許文献1】“High-order statistical properties ofspeckle fields and their application rough-surface interferometry” U.Vry and F.Fercher, J.Opt.Soc.Am.A,3,7,988-1000(1986)
【発明の概要】
【発明が解決しようとする課題】
【0007】
多波長の光を用いる干渉計測装置により計測レンジを拡大させる場合、異なる波長の波長差をより小さくする必要がある。例えば、多波長の光を用いて計測レンジ10mm(光路長差20mm)を計測する場合を考える。2波長の合成波長で計測する場合で、各波長はλ11=1500.000nmとλ12=1500.113nm(波長差113pm)の波長が必要となる。波長差113pmを分離するような回折格子を用いて2波長を分離する場合、非常に大型かつ高精度の回折光学素子が必要となり実現性が困難である。
【0008】
また、特許文献2で開示されているような薄膜(ダイクロイックミラー)により波長を分離する方法では波長差113pmを分離するような分光特性を持つような薄膜の構成の実現は困難である。一方、10mmの計測レンジを確保する別の手法として3波長で計測することも可能である。例えば、λ21=1500.00nmとλ22=1520.000nm(波長差20nm)との2つの波長で合成波長Λ212=114.000μmを構成する。更にλ21=1500.000nmとλ23=1480.629nm(波長差19.371nm)の2つの波長で合成波長Λ213=114.653μmを構成する。この結果、合成波長Λ212と合成波長Λ213との合成波長Λ2は、Λ2=20mmとなり、分離すべき必要波長差が19.371nmで10mmの計測レンジを得ることが可能となる。しかし、非特許文献1より被検面が粗さをもつ場合は、粗さに起因するスペックルの相関は波長差が広がると減少する為に、2波長構成と比較して3波長構成は検出精度が低下してしまうという問題がある。
【0009】
本発明は、簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の一つの側面は、参照面に照射された参照光と被検面に照射された計測光との干渉によって生成された干渉縞を検出して前記被検面の位置又は形状を計測する計測装置であって、第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する第1光源と、第3波長を有する第2光を生成する第2光源と、前記第1光源により生成された前記第1光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第1干渉縞を検出する第1検出器と、前記第2光源により生成された前記第2光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第2干渉縞を検出する第2検出器と、前記第2検出器により検出された前記第2干渉縞の位相のデータに基づき、前記第3波長を計測レンジを決定する計測波長として前記被検面の位置又は形状を算出する算出部と、を備え、前記第3波長は、前記第1波長及び前記第2波長の合成波長より短く、前記算出部は、第1時刻より後の前記走査区間における前記第1干渉縞の位相の変化に基づいて前記第1時刻以降における前記第2干渉縞の次数を算出し、該算出された前記第2干渉縞の次数と前記第2干渉縞の位相のデータとを用いて前記第1時刻以降における前記被検面の位置又は形状を算出する、ことを特徴とする。
【発明の効果】
【0011】
本発明によれば、簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供することができる。
【図面の簡単な説明】
【0012】
【図1】計測装置の構成を示す図。
【図2】計測手法を示す図
【図3】複数の光源の波長の推移を示す図
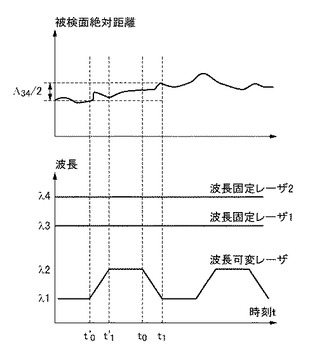
【図4】被検面の形状が計測波長の計測レンジ内である場合を示す図
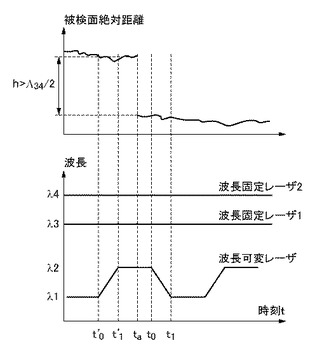
【図5】被検面の形状が計測波長の計測レンジ外である場合を示す図
【発明を実施するための形態】
【0013】
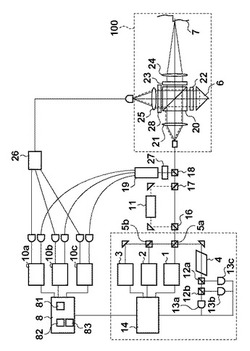
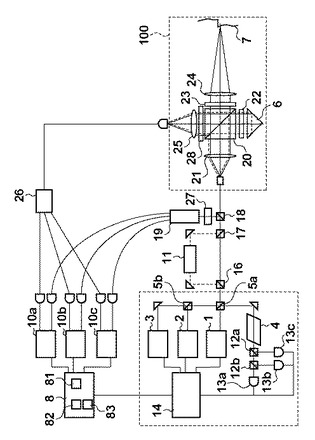
以下に、参照面に照射された参照光と被検面に照射された計測光との干渉によって生成された干渉縞を検出して前記被検面の位置又は形状を計測する計測装置の実施形態を添付の図面に基づいて詳細に説明する。本実施形態の計測装置は、図1に示すように、第1光源(波長可変レーザ)1と第2光源(固定波長レーザ)2と第3光源(固定波長レーザ)3と、波長の基準素子としてのガスセル4とを備える。波長可変レーザ1は、第1波長λ1と第2波長λ2との間で波長が走査された走査区間を含む第1光を生成する。固定波長レーザ2は、第3波長λ3を有する第2光を生成する。固定波長レーザ3は、第4波長λ4を有する第3光を生成する。
【0014】
計測装置は、更に、偏光ビームスプリッタ20と、参照面6と、参照面6及び被検面7の光路差に起因して生成された干渉縞を検出する第1乃至第3検出器10c〜10aとを有している。第1検出器10cは、波長可変レーザ1により生成された波長λ1と第2波長λ2との間で波長が走査された第1光を参照面6及び被検面7にそれぞれ照射することによって生成された第1干渉縞を検出する。第2検出器10bは、固定波長レーザ2により生成された波長λ3の第2光を参照面6及び被検面7にそれぞれ照射することによって生成された第2干渉縞を検出する。第3検出器10aは、固定波長レーザ3により生成された波長λ4の第3光を参照面6及び被検面7にそれぞれ照射することによって生成された第3干渉縞を検出する。
【0015】
計測装置は、更に、参照面6に対する被検面7の絶対距離を算出する算出部8を有する。固定波長レーザ2及び固定波長レーザ3から第1の合成波長が生成され、波長が走査される波長可変レーザ1から第2の合成波長が生成される。第1の合成波長は、前記第3波長及び前記第4波長の積を前記第3波長及び前記第4波長の差で割った波長Λ34(=λ3×λ4/|λ3−λ4|)で示される。第2の合成波長は、前記第1波長及び前記第2波長の積を前記第1波長及び前記第2波長の差で割った波長Λ12(=λ1×λ2/|λ1−λ2|)で示される。
【0016】
本実施形態では、第2の合成波長Λ12は、第1波長乃至第4波長λ1〜λ4よりはるかに長く計測精度は低いが計測レンジは広い。一方、第1の合成波長Λ34は、第1波長乃至第4波長λ1〜λ4及び第2の合成波長Λ12より短い。その結果、第1の合成波長Λ34は、第1波長乃至第4波長λ1〜λ4及び第2の合成波長Λ12と比較して計測精度が高いものの計測レンジは狭い。
【0017】
本実施形態の算出部8は、第2、第3検出器10b,10aで検出された第2、第3干渉縞の位相のデータに基づき、計測精度が高い第1の合成波長Λ34を計測レンジを決定する計測波長として被検面7の位置又は形状を算出する。参照面に対する被検面の距離を計測し、計測を行う被検面上の各点の距離(位置)を繋ぎ合わせることで被検面の形状を求めることができる。しかし、被検面7にΛ34/2を超える段差が存在している場合、その段差を検出した時刻(第1時刻)以降において、第1の合成波長Λ34の位相のデータから第1の合成波長Λ34の干渉次数が求められず、その結果、被検面7の位置又は形状を算出しえない。
【0018】
そこで、段差以上の大きさを有する第2の合成波長Λ12と第1の合成波長Λ34とを繋ぎ合わせることによって、第2の合成波長Λ12の干渉次数から第1の合成波長Λ34の干渉次数を決定する。この構成により、計測装置は、波長可変レーザ1の波長の走査量を大幅に低減して、大きな計測レンジを有することが可能となる。更に、計測装置は、レーザの電流変調による波長走査が可能となる為、被検面7の絶対距離の高速な計測を実現する。
【0019】
波長可変レーザ1を出射した光束はビームスプリッタ5aで分割される。また、波長可変レーザ1と異なる波長を有する固定波長レーザ2を出射した光束は、ビームスプリッタ5bに入射して偏向後、ビームスプリッタ5aに入射し、光軸が波長可変レーザ1を出射した光束と同軸になると同時に光束も分割される。また、波長可変レーザ1及び固定波長レーザ2と異なる波長を有する固定波長レーザ3を出射した光束は、ビームスプリッタ5bに入射し透過後、ビームスプリッタ5aに入射し、光軸が波長可変レーザ1を出射した光束と同軸になると同時に光束も分割される。
【0020】
ビームスプリッタ5aで分割された光束の一方はガスセル4を透過後、分光素子12a,12bで波長可変レーザ1と固定波長レーザ2と固定波長レーザ3の光束それぞれに分離される。ガスセル4を透過後、波長可変レーザ1の光束の光量は検出器13aにより、固定波長レーザ2の光束の光量は検出器13bにより、固定波長レーザ3の光束の光量は検出器13cによりそれぞれ検出される。ここで、波長可変レーザ1と固定波長レーザ2と固定波長レーザ3は同様のDFB(分布帰還型)半導体レーザを用いる。また、本実施形態では波長可変レーザ1と固定波長レーザ2と固定波長レーザ3とは、別のレーザとしているが、光通信に用いられる多波長光源と同様に複数の半導体レーザを1つの素子に集積した構造としても構わない。その場合にはコストおよび寸法の観点で有利である。
【0021】
レーザ制御部14は、検出器13bの信号を用いて固定波長レーザ2の波長をガスセル4の吸収線である波長λ3に安定化するように制御を行う。波長の安定化は検出器13bの透過強度が一定となるように、レーザ制御部14により固定波長レーザ2の波長を調整することにより行う。レーザ制御部14は、固定波長レーザ2の波長を調整するために、注入電流を変調する。同様にレーザ制御部14は、検出器13cの信号を用いて固定波長レーザ3の波長をガスセル4の吸収線である波長λ4に安定化するように制御を行う。
【0022】
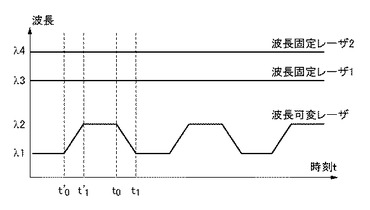
波長可変レーザ1は、波長λ1に相当するガスセル4の透過スペクトルに安定化されているが、安定化制御を解除し、電流変調によって波長λ2に波長走査された後に波長λ2で安定化される。波長λ2から波長λ1への波長走査も同様である。このように波長可変レーザ1は、少なくとも2つの基準波長λ1、λ2のいずれかに安定化可能で、λ1〜λ2間を周期的に、且つ高速に走査する。図3は本実施形態の波長可変レーザ1と固定波長レーザ2と固定波長レーザ3のそれぞれの波長の時間変化を示している。本実施形態ではガスセル4のみを用いて波長精度を保障しているが、以下で述べる次数決定の為の精度条件を満たせれば波長保障としてエタロンを用いても構わない。また、ガスセル4とエタロンの両方を用いても構わない。
【0023】
ビームスプリッタ5aで分割されたもう一方の光束は、偏光ビームスプリッタ(第1偏光ビームスプリッタ)16によって第1光束と第2光束とに更に分割される。第1光束は偏光ビームスプリッタ(第2偏光ビームスプリッタ)17まで伝播する。第2光束は一定の周波数で変調する変調部(波長シフタ)11に入射する。波長シフタ11は、波長可変レーザ1と固定波長レーザ2,3のそれぞれから出力される光束について、図示されない音響光学素子により入射波長に対して一定量の周波数シフトdνを印加する。波長シフタ11を出射した光束は偏光ビームスプリッタ17まで伝播する。前記第1光束と前記第2光束は偏光ビームスプリッタ17により合成されて再び共通光路となった後にビームスプリッタ18によって2つに分岐される。分岐された光束の一方は偏光子27を通過した後分光素子19に入射する。
【0024】
分光素子19は、同軸で入射した波長可変レーザ1と固定波長レーザ2と固定波長レーザ3の光束を分離する。分光素子19として、アレイ導波路型の回折格子を用いる。アレイ導波路型の回折格子以外の分光素子19として、プリズムやバルク型の回折格子も使用可能である。分光素子19を介した波長λ1の第1光束と第2光束との干渉信号として両光束の周波数差に相当するビート信号が第1検出器10cで検出される。また、波長λ3の前記第1光束と第2光束との干渉信号として両光束の周波数差に相当するビート信号が第2検出器10bで検出される。同様に、波長λ4の前記第1光束と第2光束との干渉信号として両光束の周波数差に相当するビート信号が第3検出器10aで検出される。第1〜第3検出器10c〜10aの内部では、偏光子により前記第1光束と前記第2光束の共通偏光成分を抽出することで干渉信号を得る。以下、分光素子19を介して第1〜第3検出器10c〜10aで検出される干渉信号を基準信号と称す。
【0025】
ビームスプリッタ18で分岐されたもう一方の光束は距離を計測する干渉計100に入射する。干渉計100に入射した光束はコリメータレンズ21で平行光束とされる。干渉計100内の偏光ビームスプリッタ20は第1光束を透過し、第2光束を反射するように配置される。偏光ビームスプリッタ20を反射した第2光束はλ/4板22により円偏光とされ、コーナーキューブである参照面6で反射され逆周りの円偏光となる。第2光束は、λ/4板22を再度透過することで、入射時とは偏波面が90度回転した直線偏光となって偏光ビームスプリッタ20に再度入射する。第2光束は、その後、偏光ビームスプリッタ20を透過した後偏光子28を通過し、更に集光レンズ25によって集光された後、分光素子26に入射する。
【0026】
一方、偏光ビームスプリッタ20を透過した第1光束は、λ/4板23により円偏光とされ、集光レンズ24で収束光束となって被検面7に集光される。被検面7で反射されて逆周りの円偏光とされた後、λ/4板23を再度透過することにより入射時とは偏波面が90度回転した直線偏光となって偏光ビームスプリッタ20に再度入射する。第1光束は、その後、偏光ビームスプリッタ20で反射され、集光レンズ25によって集光された後、分光素子26に入射する。以下、参照面6で反射する光束を参照光束、被検面7で反射する光束を計測光束と称す。尚、高コントラストの干渉信号を得る為に、参照光束と計測光束の強度を同じにすることが好ましい。この為、回転機構(不図示)によって偏光子28を回転させ強度調整を可能にすることが好ましい。またNDフィルタ等(不図示)で参照光束もしくは計測光束の強度を調整しても構わない。
【0027】
分光素子26に入射した波長λ1の参照光束と計測光束の干渉信号が第1検出器10cで検出される。また、波長λ3の参照光束と計測光束の干渉信号が第2検出器10bで検出される。また、波長λ4の参照光束と計測光束の干渉信号が第3検出器10aで検出される。以下、分光素子26を介して第1〜第3検出器10c〜10aで検出される干渉信号を計測信号と称す。計測信号は、第1光束と第2光束の干渉信号として両光束の周波数差に相当するビート信号となる点は同一であるが、計測光と参照光の光路長差により干渉信号の位相が基準信号と異なる。
【0028】
干渉計100の光束を分割する素子として偏光成分で分割可能な偏光ビームスプリッタ20を用いることによる効果は、参照面6と被検面7のそれぞれで反射する光束を偏光により分離する事が可能となる点にある。以上の効果を利用すれば、直交する2つの偏光間で僅かに周波数シフト差を加えることで被検面7と参照面6間のヘテロダイン検出が構成可能となり、高精度な位相計測が実現する。また、本実施例では被検面7の距離を計測する干渉計として構成したが、被検面7をXY平面内に駆動可能なステージに載せることで被検面7の面形状情報を得るような形状計測にも適用可能である。また、この場合、駆動ステージの代わりにガルバノミラーを干渉計100と被検面7の間に配置しても構わない。
【0029】
算出部8は、少なくともメモリ81と第1算出部82と第2算出部83から構成されている。メモリ81は各光源1〜3の位相計測を記憶する。第1算出部82は、基準信号と計測信号からの信号が接続され、被検面7と参照面6間の絶対距離を算出する。第2算出部83は、計測時に被検面7の高低差が波長λ3と波長λ4との第1の合成波長Λ34の計測レンジ超えてしまう場合や光源からの光が一時遮断されてしまうことによって、第1の合成波長Λ34の干渉次数が不明になった場合に後から干渉次数を決定する。同時に算出部8は、レーザ制御部14にも接続され計測フローに応じて波長可変レーザ1の波長制御も行う。本実施形態は1つの光源ユニットに対して複数の干渉計100を配置する際には、光源ユニットとビームスプリッタ16との間で光束を分割することで、容易に対応可能な構成になっている。
【0030】
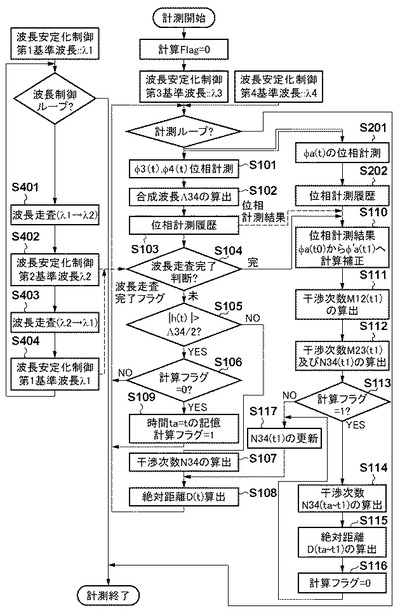
次に図2を用いて本実施形態の計測の手法を説明する。算出部8は、まず計測を開始するにあたって計算フラグを0に設定する。ここで、計算フラグとは波長走査開始時刻t’0から次の波長走査終了時刻t1までの間の被検面7の高低差がΛ34の半分を超えた場合1となり、それ以外は0とする判断フラグである。この計算フラグの役割については下記の説明の中で行っていく。
【0031】
計測フローは大きく2つのループに分けられる。1つは波長制御ループであり、もう1つは計測ループである。波長制御ループでは、図3で示すように、波長可変レーザ1を基準波長λ1〜λ2間で走査し、その後どちらかの基準波長に安定化制御することを繰り返している。また、S402とS404で、算出部8は、基準波長に制御完了後、波長走査完了を示すフラグを計測ループ側のS104へ送信する。このフラグを受けて、算出部8は、S104で波長走査完了の判断をする。
【0032】
次に計測ループについて説明をする。計測ループは、波長可変レーザ1の波長を第1基準波長λ1と第2基準波長λ2との間で走査しながら、当該走査された波長と、固定波長レーザ2,3の第3基準波長λ3及び第4基準波長λ4で位相の計測を繰り返す。ここでは、時刻t0〜t1の間における位相計測を例にとって説明する。第1〜第3検出器10c〜10aは、S101、S201で、第3基準波長λ3及び、第4基準波長λ4および第2基準波長λ2において位相計測をする。位相計測とは計測信号と基準信号の位相差を計測することであり、算出部8は、基準信号と計測信号の位相を位相計で計測しそれらの差分を算出することにより位相差を得る。得られた位相差は図12のメモリ81に格納される。
【0033】
S101で第2、第3検出器10b,10cによりそれぞれ計測される位相差φk(k=3,4)は式1で表わされる。
φk(t)=2π×2D(t)/λk (k=3,4)・・・(1)
【0034】
S201で第1検出器10cにより計測される波長可変レーザ1の光を用いた位相差φa(t0)は式2で表される。図3に示すように、時刻t0のときの波長可変レーザの波長はλ2である。Dは参照面と被検面の絶対距離である。
φa(t0)=2π×2D(t0)/λ2・・・(2)
【0035】
S102で、算出部8は、S101で計測された位相差φ3及びφ4から式3を用いてλ3とλ4の第1の合成波長Λ34の位相差φ34(t)を算出する。
φ34(t)=φ4(t)−φ3(t)・・・(3)
なお、第1の合成波長Λ34は、λ1とλ2との第2の合成波長Λ12よりもはるかに短く、被検面7の距離、形状を最も高精度に計測し得る。本実施形態では、被検面7の距離、形状を最も高精度に計測し得る短い波長の合成波長を得るために、波長λ3を有する固定波長レーザ2と波長λ4を有する固定波長レーザ3とを用意した。しかし、例えば、固定波長レーザ2の波長λ3が被検面7の距離、形状を高精度に計測し得る波長であるならば、固定波長レーザ3を設けなくてもよい。
【0036】
S103及びS202で、算出部8は、S101、S102及びS201にて計測かつ算出された、合成波長Λ34の位相差Φ34(t)と可変レーザの位相差φa(t0)の履歴をメモリ81に格納する。S104で、算出部8は、計測ループでのS402、S404より送信された波長走査完了フラグに基づいて、波長走査が完了したか否かを判断する。波長走査が未完の場合はS105へ、完了している場合はS110へ進む。
【0037】
まず、S104にて波長走査が未完である場合について説明する。この場合、算出部8は、S105で、式4で示される条件式を満たすかどうか判断する。
|h(t)|<Λ34/2・・・(4)
ここでh(t)は時刻t’1における被検面7の距離と各計測時の時刻taにおける被検面の距離との差を表わす。
【0038】
式4の条件を満たさない場合は、先の波長走査が完了した時点(t=t’1)以降に被検面7の高低差が合成波長Λ34の計測レンジ(Λ34/2)を超えてしまい位相の接続の決定ができなくなる。計測レンジを越える被検面7の段差を計測する時には急峻な光量変化が発生する。したがって光量モニタ(図2には不図示)で光量変動の変化量の閾値を事前に設定しておき、光量が閾値を超えたとき式4の条件を満たさなくなったと判断する。もしくは、事前に被検面7の形状の概略が分かっている場合は、その形状情報を基に段差の存在を判断しても構わない。
【0039】
まず、図4のように、波長走査開始時刻t’0から次の波長走査終了時刻t1の間の被検面7の段差が小さくS105にて式4を満たさない場合(S105でNoの場合)について説明する。算出部8は、S107で、前回計測時の干渉次数N34(i)及び位相差の計測結果φ34(i)と、今回の位相差の計測結果φ34(i+1)とを用いて、式5により干渉次数N34を算出する。
N34(i+1)=N34(i)+round(φ34(i+1)−φ34(i))・・・(5)
【0040】
算出部8の第1算出部82は、S107で、第1の合成波長Λ34の相対的な位相変化を用いて式6より被検面7の絶対距離Dを算出する。式4の条件を満たすのであれば、次の波長走査完了のフラグが確認されるまではこのように高速な相対測長と干渉次数N34を用いて絶対距離Dを算出する。そして、計測ループへ戻る。
D(t)=(Λ34/2)×{N34(t)+φ34(t)/(2π)}・・・(6)
【0041】
次に、S105にて、図5のようにある走査区間が開始した時刻t’0から次の走査区間が終了した時刻(第2時刻)t1の間の時刻(第1時刻)t=taにおいて被検面7に数式4を満たす段差がある場合(S105でYesの場合)について説明する。算出部8は、S106において計算フラグが0の場合、S109で、被検面7の段差の計測時刻taをメモリ81に記憶する。また、算出部8は、計算フラグを1に変更する。この段階から次の波長走査が完了するまでの間は干渉次数N34や絶対測長距離D(t)の算出は行わず、計測ループに戻る。S106において、計算フラグが1の場合はそのまま計測ループに戻る。
【0042】
次にS104にて波長走査が完了している場合について説明する。時刻t1での波長可変レーザ1の光を用いた位相差φa(t1)が式7より求められる。
φa(t1)=2π×2D(t1)/λ1・・・(7)
【0043】
時刻t1での波長可変レーザ1の位相は、時刻t0での波長可変レーザ1の光を用いた位相差φa(t0)に、高精度の第1の合成波長Λ34を使用したt0〜t1間の連続的な位相差の変化から算出した相対変位ΔD(t0〜t1)を加算することでも算出される。すなわち、算出部8は、S202で、履歴に残された位相差の計測結果φa(t0)から、波長λ1のままで絶対距離D(t1)のときの位相差φ’a(t1)を式8を用いて算出する。この時刻t1での波長可変レーザ1の光を用いた位相差φ’a(t1)は、式7で算出された位相差φa(t1)の補正値に当たる。
φ’a(t1)=2π{(φa(t0)/2π)+2ΔD(t0〜t1)/λ1}・・・(8)
ただし、
ΔD(t0〜t1)=(Λ34/2π)×{φ34(t1)−φ34(t0)}・・・(9)
【0044】
算出部8は、S111で、式10を用いて時刻t1での干渉次数M12(t1)を算出する。ここでΛ12は波長λ1とλ2の合成波長を表わす。
M12(t1)={2D(t1)/Λ12}−{(φa(t1)−φ’a(t1))/2π}・・・(10)
【0045】
算出部8は、S112で、合成波長Λ34による計測の干渉次数N34(t1)を算出する。また、算出部8は、S112で、波長λ2と合成波長Λ34の合成波長をΛ234による計測の干渉次数M23(t1)も算出する。まず、式10をD(t1)について解くと、式11のように変形される。
D(t1)=(Λ12/2)×{M12(t1)+(φa(t1)−φ’a(t1))/2π}・・・(11)
【0046】
D(t1)は、合成波長Λ34、合成波長Λ234を用いて式12、式13のように表わされる。
D(t1)=(Λ34/2)×{N34(t1)+(φ34(t1)/2π)}・・・(12)
D(t1)=(Λ234/2)×{M23(t1)+(φ34(t1)−φa(t1))/2π}・・・(13)
【0047】
式12、式13を用いてN34(t1)について解き、式11、式13を用いてM23(t1)について解くと、N34(t1)、M23(t1)は式14、式15でそれぞれ表わされる。
N34(t1)=round({M23(t1)+(φ34(t1)−φa(t1))/2π}(Λ234/Λ34)−{φ34(t1)/2π})・・・(14)
M23(t1)=round({M12(t1)+(φa(t1)−φ’a(t1))/2π}(Λ12/Λ234)−{(φ34(t1)−φa(t1))/2π})・・・(15)
【0048】
算出部8は、S111で求めたM12(t1)から式15を用いてM23(t1)を算出し、算出されたM23(t1)から式14を用いてN34(t1)を算出する。3つの合成波長Λ34、Λ234、Λ12にはΛ34<<Λ234<<Λ12の関係がある。最も波長の長いΛ12は最も計測レンジが大きく被検面7に段差が存在しても連続して計測可能であるが計測精度が低い。一方、最も波長の短い合成波長Λ34用いると最も高精度に被検面7の距離、形状が計測できるが、計測レンジが小さい。そのため、合成波長Λ34用いると段差がある時点で合成波長Λ34の干渉次数N34が不連続となる。しかし、時刻t=t1における合成波長Λ34の干渉次数N34(t1)が式14を用いて算出できる。
【0049】
S113において計算フラグが0の場合、つまり前回の走査区間の開始時刻t’0からt1までの間の被検面7の高低差がΛ34の半分以下である場合について説明する。この場合、算出部8は、S117において、S107に記録された干渉次数N34をS112で求められた干渉次N34(t1)に更新し計算ループに戻る。
【0050】
一方、S113において計算フラグが1の場合、つまり前回の走査区間の終了時刻t’0からt1までの間の被検面7の高低差がΛ34の半分以上である場合について説明する。S109で記憶した第1時刻taから第2時刻t1までの位相接続ができない為に第1時刻以降における絶対距離D(t)が算出されていない。ところで、t=t1における次数N34(t1)は、S112で求めて既知となっている。また、t=ta〜t1の間の合成波長Λ34の位相差の履歴は、S103でメモリ81に記憶されている。そこで、算出部8は、S114において、t=t1における次数N34(t1)とt=ta〜t1の間の合成波長Λ34の位相差の履歴とから式16を用いてt=ta〜t1の間の次数N34の履歴を逆算する。
N34(i+1)=N34(i)+round{φ34(i+1)−φ34(i)} ・・・(16)
【0051】
算出部8は、S115で式17を用いて合成波長Λ34の相対的な位相差の変化の履歴を用いて時刻taからt1までの間の被検面7の絶対距離D(t)を算出する。
D(t)=(Λ34/2)×{N34(t)+(φ34(t)/2π)} ・・・(17)
算出部8は、S116で計算フラグを0に戻し、S117において、S107に記録された干渉次数N34をS112で求められた干渉次数N34に更新し計算ループに戻る。S114、S115は第1算出部82で処理される計測ループとは別に、第2算出部83で計算することで計測ループ時間に遅延を発生させないようにすることができる。以上の通り、本実施形態によれば波長走査量の低減が可能となる為、簡易な構成で高速かつ計測レンジの広い計測装置を提供する事が出来る。
【0052】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。例えば、本実施形態では被検面の高低差が合成波長Λ34を超えた場合に干渉次数が不明となってしまうことに対する対策を説明した。同様に、光源からの光が一時的に遮断されることによって干渉次数が不明となる場合にも同じような対策が可能となる。また、ヘテロダイン干渉計の構成で説明したがホモダイン干渉計での構成でも構わない。
【技術分野】
【0001】
本発明は、被検面の位置又は形状を計測する計測装置に関する。
【背景技術】
【0002】
形状等を高精度に計測する装置として一般的に干渉計測装置が知られている。単波長の光を用いる干渉計測装置では、被検面に計測光の波長の半分以上の段差がある場合には段差の高低差の判別ができない為、被検面の形状等を計測できない。更に被検面が粗さを持つ場合、表面粗さに起因するスペックルパターンは2πより大きい標準偏差のランダム位相を有する為、単波長の光を用いる干渉計測装置では計測不確さが大きくなってしまう。
【0003】
これらの問題を解決する為に、複数の異なる波長で干渉計測し各波長の位相を合成する干渉計測装置が知られている。例えば、2つの異なる波長λ1、λ2(λ1>λ2)を用いる場合、その合成波長Λ=λ1×λ2/(λ1−λ2)の半分までの段差が計測可能となり単波長の光のみを用いる干渉計測装置と比較して計測レンジの拡大が可能となる。合成波長の光を用いる干渉計測装置は、特許文献1、2にて開示されている。特許文献1では、多重モードレーザを光源に用い、複数の波長を同時に干渉させ回折格子にて波長分離して波長毎に位相検出を行う。特許文献2では、複数の波長を同時に発振するレーザ光源を用い、複数の波長を同時に干渉させダイクロイックミラーにて波長分離して波長毎に位相検出を行う。
【0004】
一方、非特許文献1によると、2つの波長のスペックルに相関があるならば、その2つの波長の位相差は巨視的表面プロファイルと微視的表面粗さに関する情報が得られるとしている。更に2つの波長のスペックルの相関は、合成波長に依存し、合成波長が小さい程減少し、逆に合成波長が大きいと増加する。このことから, 単波長の光を用いる干渉計測装置では困難である粗面を有する被検物においても、多波長の光を用いる干渉計測装置では精度良く計測することが可能となる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−52540号公報
【特許文献2】特開平10−281738号公報
【非特許文献】
【0006】
【非特許文献1】“High-order statistical properties ofspeckle fields and their application rough-surface interferometry” U.Vry and F.Fercher, J.Opt.Soc.Am.A,3,7,988-1000(1986)
【発明の概要】
【発明が解決しようとする課題】
【0007】
多波長の光を用いる干渉計測装置により計測レンジを拡大させる場合、異なる波長の波長差をより小さくする必要がある。例えば、多波長の光を用いて計測レンジ10mm(光路長差20mm)を計測する場合を考える。2波長の合成波長で計測する場合で、各波長はλ11=1500.000nmとλ12=1500.113nm(波長差113pm)の波長が必要となる。波長差113pmを分離するような回折格子を用いて2波長を分離する場合、非常に大型かつ高精度の回折光学素子が必要となり実現性が困難である。
【0008】
また、特許文献2で開示されているような薄膜(ダイクロイックミラー)により波長を分離する方法では波長差113pmを分離するような分光特性を持つような薄膜の構成の実現は困難である。一方、10mmの計測レンジを確保する別の手法として3波長で計測することも可能である。例えば、λ21=1500.00nmとλ22=1520.000nm(波長差20nm)との2つの波長で合成波長Λ212=114.000μmを構成する。更にλ21=1500.000nmとλ23=1480.629nm(波長差19.371nm)の2つの波長で合成波長Λ213=114.653μmを構成する。この結果、合成波長Λ212と合成波長Λ213との合成波長Λ2は、Λ2=20mmとなり、分離すべき必要波長差が19.371nmで10mmの計測レンジを得ることが可能となる。しかし、非特許文献1より被検面が粗さをもつ場合は、粗さに起因するスペックルの相関は波長差が広がると減少する為に、2波長構成と比較して3波長構成は検出精度が低下してしまうという問題がある。
【0009】
本発明は、簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の一つの側面は、参照面に照射された参照光と被検面に照射された計測光との干渉によって生成された干渉縞を検出して前記被検面の位置又は形状を計測する計測装置であって、第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する第1光源と、第3波長を有する第2光を生成する第2光源と、前記第1光源により生成された前記第1光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第1干渉縞を検出する第1検出器と、前記第2光源により生成された前記第2光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第2干渉縞を検出する第2検出器と、前記第2検出器により検出された前記第2干渉縞の位相のデータに基づき、前記第3波長を計測レンジを決定する計測波長として前記被検面の位置又は形状を算出する算出部と、を備え、前記第3波長は、前記第1波長及び前記第2波長の合成波長より短く、前記算出部は、第1時刻より後の前記走査区間における前記第1干渉縞の位相の変化に基づいて前記第1時刻以降における前記第2干渉縞の次数を算出し、該算出された前記第2干渉縞の次数と前記第2干渉縞の位相のデータとを用いて前記第1時刻以降における前記被検面の位置又は形状を算出する、ことを特徴とする。
【発明の効果】
【0011】
本発明によれば、簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供することができる。
【図面の簡単な説明】
【0012】
【図1】計測装置の構成を示す図。
【図2】計測手法を示す図
【図3】複数の光源の波長の推移を示す図
【図4】被検面の形状が計測波長の計測レンジ内である場合を示す図
【図5】被検面の形状が計測波長の計測レンジ外である場合を示す図
【発明を実施するための形態】
【0013】
以下に、参照面に照射された参照光と被検面に照射された計測光との干渉によって生成された干渉縞を検出して前記被検面の位置又は形状を計測する計測装置の実施形態を添付の図面に基づいて詳細に説明する。本実施形態の計測装置は、図1に示すように、第1光源(波長可変レーザ)1と第2光源(固定波長レーザ)2と第3光源(固定波長レーザ)3と、波長の基準素子としてのガスセル4とを備える。波長可変レーザ1は、第1波長λ1と第2波長λ2との間で波長が走査された走査区間を含む第1光を生成する。固定波長レーザ2は、第3波長λ3を有する第2光を生成する。固定波長レーザ3は、第4波長λ4を有する第3光を生成する。
【0014】
計測装置は、更に、偏光ビームスプリッタ20と、参照面6と、参照面6及び被検面7の光路差に起因して生成された干渉縞を検出する第1乃至第3検出器10c〜10aとを有している。第1検出器10cは、波長可変レーザ1により生成された波長λ1と第2波長λ2との間で波長が走査された第1光を参照面6及び被検面7にそれぞれ照射することによって生成された第1干渉縞を検出する。第2検出器10bは、固定波長レーザ2により生成された波長λ3の第2光を参照面6及び被検面7にそれぞれ照射することによって生成された第2干渉縞を検出する。第3検出器10aは、固定波長レーザ3により生成された波長λ4の第3光を参照面6及び被検面7にそれぞれ照射することによって生成された第3干渉縞を検出する。
【0015】
計測装置は、更に、参照面6に対する被検面7の絶対距離を算出する算出部8を有する。固定波長レーザ2及び固定波長レーザ3から第1の合成波長が生成され、波長が走査される波長可変レーザ1から第2の合成波長が生成される。第1の合成波長は、前記第3波長及び前記第4波長の積を前記第3波長及び前記第4波長の差で割った波長Λ34(=λ3×λ4/|λ3−λ4|)で示される。第2の合成波長は、前記第1波長及び前記第2波長の積を前記第1波長及び前記第2波長の差で割った波長Λ12(=λ1×λ2/|λ1−λ2|)で示される。
【0016】
本実施形態では、第2の合成波長Λ12は、第1波長乃至第4波長λ1〜λ4よりはるかに長く計測精度は低いが計測レンジは広い。一方、第1の合成波長Λ34は、第1波長乃至第4波長λ1〜λ4及び第2の合成波長Λ12より短い。その結果、第1の合成波長Λ34は、第1波長乃至第4波長λ1〜λ4及び第2の合成波長Λ12と比較して計測精度が高いものの計測レンジは狭い。
【0017】
本実施形態の算出部8は、第2、第3検出器10b,10aで検出された第2、第3干渉縞の位相のデータに基づき、計測精度が高い第1の合成波長Λ34を計測レンジを決定する計測波長として被検面7の位置又は形状を算出する。参照面に対する被検面の距離を計測し、計測を行う被検面上の各点の距離(位置)を繋ぎ合わせることで被検面の形状を求めることができる。しかし、被検面7にΛ34/2を超える段差が存在している場合、その段差を検出した時刻(第1時刻)以降において、第1の合成波長Λ34の位相のデータから第1の合成波長Λ34の干渉次数が求められず、その結果、被検面7の位置又は形状を算出しえない。
【0018】
そこで、段差以上の大きさを有する第2の合成波長Λ12と第1の合成波長Λ34とを繋ぎ合わせることによって、第2の合成波長Λ12の干渉次数から第1の合成波長Λ34の干渉次数を決定する。この構成により、計測装置は、波長可変レーザ1の波長の走査量を大幅に低減して、大きな計測レンジを有することが可能となる。更に、計測装置は、レーザの電流変調による波長走査が可能となる為、被検面7の絶対距離の高速な計測を実現する。
【0019】
波長可変レーザ1を出射した光束はビームスプリッタ5aで分割される。また、波長可変レーザ1と異なる波長を有する固定波長レーザ2を出射した光束は、ビームスプリッタ5bに入射して偏向後、ビームスプリッタ5aに入射し、光軸が波長可変レーザ1を出射した光束と同軸になると同時に光束も分割される。また、波長可変レーザ1及び固定波長レーザ2と異なる波長を有する固定波長レーザ3を出射した光束は、ビームスプリッタ5bに入射し透過後、ビームスプリッタ5aに入射し、光軸が波長可変レーザ1を出射した光束と同軸になると同時に光束も分割される。
【0020】
ビームスプリッタ5aで分割された光束の一方はガスセル4を透過後、分光素子12a,12bで波長可変レーザ1と固定波長レーザ2と固定波長レーザ3の光束それぞれに分離される。ガスセル4を透過後、波長可変レーザ1の光束の光量は検出器13aにより、固定波長レーザ2の光束の光量は検出器13bにより、固定波長レーザ3の光束の光量は検出器13cによりそれぞれ検出される。ここで、波長可変レーザ1と固定波長レーザ2と固定波長レーザ3は同様のDFB(分布帰還型)半導体レーザを用いる。また、本実施形態では波長可変レーザ1と固定波長レーザ2と固定波長レーザ3とは、別のレーザとしているが、光通信に用いられる多波長光源と同様に複数の半導体レーザを1つの素子に集積した構造としても構わない。その場合にはコストおよび寸法の観点で有利である。
【0021】
レーザ制御部14は、検出器13bの信号を用いて固定波長レーザ2の波長をガスセル4の吸収線である波長λ3に安定化するように制御を行う。波長の安定化は検出器13bの透過強度が一定となるように、レーザ制御部14により固定波長レーザ2の波長を調整することにより行う。レーザ制御部14は、固定波長レーザ2の波長を調整するために、注入電流を変調する。同様にレーザ制御部14は、検出器13cの信号を用いて固定波長レーザ3の波長をガスセル4の吸収線である波長λ4に安定化するように制御を行う。
【0022】
波長可変レーザ1は、波長λ1に相当するガスセル4の透過スペクトルに安定化されているが、安定化制御を解除し、電流変調によって波長λ2に波長走査された後に波長λ2で安定化される。波長λ2から波長λ1への波長走査も同様である。このように波長可変レーザ1は、少なくとも2つの基準波長λ1、λ2のいずれかに安定化可能で、λ1〜λ2間を周期的に、且つ高速に走査する。図3は本実施形態の波長可変レーザ1と固定波長レーザ2と固定波長レーザ3のそれぞれの波長の時間変化を示している。本実施形態ではガスセル4のみを用いて波長精度を保障しているが、以下で述べる次数決定の為の精度条件を満たせれば波長保障としてエタロンを用いても構わない。また、ガスセル4とエタロンの両方を用いても構わない。
【0023】
ビームスプリッタ5aで分割されたもう一方の光束は、偏光ビームスプリッタ(第1偏光ビームスプリッタ)16によって第1光束と第2光束とに更に分割される。第1光束は偏光ビームスプリッタ(第2偏光ビームスプリッタ)17まで伝播する。第2光束は一定の周波数で変調する変調部(波長シフタ)11に入射する。波長シフタ11は、波長可変レーザ1と固定波長レーザ2,3のそれぞれから出力される光束について、図示されない音響光学素子により入射波長に対して一定量の周波数シフトdνを印加する。波長シフタ11を出射した光束は偏光ビームスプリッタ17まで伝播する。前記第1光束と前記第2光束は偏光ビームスプリッタ17により合成されて再び共通光路となった後にビームスプリッタ18によって2つに分岐される。分岐された光束の一方は偏光子27を通過した後分光素子19に入射する。
【0024】
分光素子19は、同軸で入射した波長可変レーザ1と固定波長レーザ2と固定波長レーザ3の光束を分離する。分光素子19として、アレイ導波路型の回折格子を用いる。アレイ導波路型の回折格子以外の分光素子19として、プリズムやバルク型の回折格子も使用可能である。分光素子19を介した波長λ1の第1光束と第2光束との干渉信号として両光束の周波数差に相当するビート信号が第1検出器10cで検出される。また、波長λ3の前記第1光束と第2光束との干渉信号として両光束の周波数差に相当するビート信号が第2検出器10bで検出される。同様に、波長λ4の前記第1光束と第2光束との干渉信号として両光束の周波数差に相当するビート信号が第3検出器10aで検出される。第1〜第3検出器10c〜10aの内部では、偏光子により前記第1光束と前記第2光束の共通偏光成分を抽出することで干渉信号を得る。以下、分光素子19を介して第1〜第3検出器10c〜10aで検出される干渉信号を基準信号と称す。
【0025】
ビームスプリッタ18で分岐されたもう一方の光束は距離を計測する干渉計100に入射する。干渉計100に入射した光束はコリメータレンズ21で平行光束とされる。干渉計100内の偏光ビームスプリッタ20は第1光束を透過し、第2光束を反射するように配置される。偏光ビームスプリッタ20を反射した第2光束はλ/4板22により円偏光とされ、コーナーキューブである参照面6で反射され逆周りの円偏光となる。第2光束は、λ/4板22を再度透過することで、入射時とは偏波面が90度回転した直線偏光となって偏光ビームスプリッタ20に再度入射する。第2光束は、その後、偏光ビームスプリッタ20を透過した後偏光子28を通過し、更に集光レンズ25によって集光された後、分光素子26に入射する。
【0026】
一方、偏光ビームスプリッタ20を透過した第1光束は、λ/4板23により円偏光とされ、集光レンズ24で収束光束となって被検面7に集光される。被検面7で反射されて逆周りの円偏光とされた後、λ/4板23を再度透過することにより入射時とは偏波面が90度回転した直線偏光となって偏光ビームスプリッタ20に再度入射する。第1光束は、その後、偏光ビームスプリッタ20で反射され、集光レンズ25によって集光された後、分光素子26に入射する。以下、参照面6で反射する光束を参照光束、被検面7で反射する光束を計測光束と称す。尚、高コントラストの干渉信号を得る為に、参照光束と計測光束の強度を同じにすることが好ましい。この為、回転機構(不図示)によって偏光子28を回転させ強度調整を可能にすることが好ましい。またNDフィルタ等(不図示)で参照光束もしくは計測光束の強度を調整しても構わない。
【0027】
分光素子26に入射した波長λ1の参照光束と計測光束の干渉信号が第1検出器10cで検出される。また、波長λ3の参照光束と計測光束の干渉信号が第2検出器10bで検出される。また、波長λ4の参照光束と計測光束の干渉信号が第3検出器10aで検出される。以下、分光素子26を介して第1〜第3検出器10c〜10aで検出される干渉信号を計測信号と称す。計測信号は、第1光束と第2光束の干渉信号として両光束の周波数差に相当するビート信号となる点は同一であるが、計測光と参照光の光路長差により干渉信号の位相が基準信号と異なる。
【0028】
干渉計100の光束を分割する素子として偏光成分で分割可能な偏光ビームスプリッタ20を用いることによる効果は、参照面6と被検面7のそれぞれで反射する光束を偏光により分離する事が可能となる点にある。以上の効果を利用すれば、直交する2つの偏光間で僅かに周波数シフト差を加えることで被検面7と参照面6間のヘテロダイン検出が構成可能となり、高精度な位相計測が実現する。また、本実施例では被検面7の距離を計測する干渉計として構成したが、被検面7をXY平面内に駆動可能なステージに載せることで被検面7の面形状情報を得るような形状計測にも適用可能である。また、この場合、駆動ステージの代わりにガルバノミラーを干渉計100と被検面7の間に配置しても構わない。
【0029】
算出部8は、少なくともメモリ81と第1算出部82と第2算出部83から構成されている。メモリ81は各光源1〜3の位相計測を記憶する。第1算出部82は、基準信号と計測信号からの信号が接続され、被検面7と参照面6間の絶対距離を算出する。第2算出部83は、計測時に被検面7の高低差が波長λ3と波長λ4との第1の合成波長Λ34の計測レンジ超えてしまう場合や光源からの光が一時遮断されてしまうことによって、第1の合成波長Λ34の干渉次数が不明になった場合に後から干渉次数を決定する。同時に算出部8は、レーザ制御部14にも接続され計測フローに応じて波長可変レーザ1の波長制御も行う。本実施形態は1つの光源ユニットに対して複数の干渉計100を配置する際には、光源ユニットとビームスプリッタ16との間で光束を分割することで、容易に対応可能な構成になっている。
【0030】
次に図2を用いて本実施形態の計測の手法を説明する。算出部8は、まず計測を開始するにあたって計算フラグを0に設定する。ここで、計算フラグとは波長走査開始時刻t’0から次の波長走査終了時刻t1までの間の被検面7の高低差がΛ34の半分を超えた場合1となり、それ以外は0とする判断フラグである。この計算フラグの役割については下記の説明の中で行っていく。
【0031】
計測フローは大きく2つのループに分けられる。1つは波長制御ループであり、もう1つは計測ループである。波長制御ループでは、図3で示すように、波長可変レーザ1を基準波長λ1〜λ2間で走査し、その後どちらかの基準波長に安定化制御することを繰り返している。また、S402とS404で、算出部8は、基準波長に制御完了後、波長走査完了を示すフラグを計測ループ側のS104へ送信する。このフラグを受けて、算出部8は、S104で波長走査完了の判断をする。
【0032】
次に計測ループについて説明をする。計測ループは、波長可変レーザ1の波長を第1基準波長λ1と第2基準波長λ2との間で走査しながら、当該走査された波長と、固定波長レーザ2,3の第3基準波長λ3及び第4基準波長λ4で位相の計測を繰り返す。ここでは、時刻t0〜t1の間における位相計測を例にとって説明する。第1〜第3検出器10c〜10aは、S101、S201で、第3基準波長λ3及び、第4基準波長λ4および第2基準波長λ2において位相計測をする。位相計測とは計測信号と基準信号の位相差を計測することであり、算出部8は、基準信号と計測信号の位相を位相計で計測しそれらの差分を算出することにより位相差を得る。得られた位相差は図12のメモリ81に格納される。
【0033】
S101で第2、第3検出器10b,10cによりそれぞれ計測される位相差φk(k=3,4)は式1で表わされる。
φk(t)=2π×2D(t)/λk (k=3,4)・・・(1)
【0034】
S201で第1検出器10cにより計測される波長可変レーザ1の光を用いた位相差φa(t0)は式2で表される。図3に示すように、時刻t0のときの波長可変レーザの波長はλ2である。Dは参照面と被検面の絶対距離である。
φa(t0)=2π×2D(t0)/λ2・・・(2)
【0035】
S102で、算出部8は、S101で計測された位相差φ3及びφ4から式3を用いてλ3とλ4の第1の合成波長Λ34の位相差φ34(t)を算出する。
φ34(t)=φ4(t)−φ3(t)・・・(3)
なお、第1の合成波長Λ34は、λ1とλ2との第2の合成波長Λ12よりもはるかに短く、被検面7の距離、形状を最も高精度に計測し得る。本実施形態では、被検面7の距離、形状を最も高精度に計測し得る短い波長の合成波長を得るために、波長λ3を有する固定波長レーザ2と波長λ4を有する固定波長レーザ3とを用意した。しかし、例えば、固定波長レーザ2の波長λ3が被検面7の距離、形状を高精度に計測し得る波長であるならば、固定波長レーザ3を設けなくてもよい。
【0036】
S103及びS202で、算出部8は、S101、S102及びS201にて計測かつ算出された、合成波長Λ34の位相差Φ34(t)と可変レーザの位相差φa(t0)の履歴をメモリ81に格納する。S104で、算出部8は、計測ループでのS402、S404より送信された波長走査完了フラグに基づいて、波長走査が完了したか否かを判断する。波長走査が未完の場合はS105へ、完了している場合はS110へ進む。
【0037】
まず、S104にて波長走査が未完である場合について説明する。この場合、算出部8は、S105で、式4で示される条件式を満たすかどうか判断する。
|h(t)|<Λ34/2・・・(4)
ここでh(t)は時刻t’1における被検面7の距離と各計測時の時刻taにおける被検面の距離との差を表わす。
【0038】
式4の条件を満たさない場合は、先の波長走査が完了した時点(t=t’1)以降に被検面7の高低差が合成波長Λ34の計測レンジ(Λ34/2)を超えてしまい位相の接続の決定ができなくなる。計測レンジを越える被検面7の段差を計測する時には急峻な光量変化が発生する。したがって光量モニタ(図2には不図示)で光量変動の変化量の閾値を事前に設定しておき、光量が閾値を超えたとき式4の条件を満たさなくなったと判断する。もしくは、事前に被検面7の形状の概略が分かっている場合は、その形状情報を基に段差の存在を判断しても構わない。
【0039】
まず、図4のように、波長走査開始時刻t’0から次の波長走査終了時刻t1の間の被検面7の段差が小さくS105にて式4を満たさない場合(S105でNoの場合)について説明する。算出部8は、S107で、前回計測時の干渉次数N34(i)及び位相差の計測結果φ34(i)と、今回の位相差の計測結果φ34(i+1)とを用いて、式5により干渉次数N34を算出する。
N34(i+1)=N34(i)+round(φ34(i+1)−φ34(i))・・・(5)
【0040】
算出部8の第1算出部82は、S107で、第1の合成波長Λ34の相対的な位相変化を用いて式6より被検面7の絶対距離Dを算出する。式4の条件を満たすのであれば、次の波長走査完了のフラグが確認されるまではこのように高速な相対測長と干渉次数N34を用いて絶対距離Dを算出する。そして、計測ループへ戻る。
D(t)=(Λ34/2)×{N34(t)+φ34(t)/(2π)}・・・(6)
【0041】
次に、S105にて、図5のようにある走査区間が開始した時刻t’0から次の走査区間が終了した時刻(第2時刻)t1の間の時刻(第1時刻)t=taにおいて被検面7に数式4を満たす段差がある場合(S105でYesの場合)について説明する。算出部8は、S106において計算フラグが0の場合、S109で、被検面7の段差の計測時刻taをメモリ81に記憶する。また、算出部8は、計算フラグを1に変更する。この段階から次の波長走査が完了するまでの間は干渉次数N34や絶対測長距離D(t)の算出は行わず、計測ループに戻る。S106において、計算フラグが1の場合はそのまま計測ループに戻る。
【0042】
次にS104にて波長走査が完了している場合について説明する。時刻t1での波長可変レーザ1の光を用いた位相差φa(t1)が式7より求められる。
φa(t1)=2π×2D(t1)/λ1・・・(7)
【0043】
時刻t1での波長可変レーザ1の位相は、時刻t0での波長可変レーザ1の光を用いた位相差φa(t0)に、高精度の第1の合成波長Λ34を使用したt0〜t1間の連続的な位相差の変化から算出した相対変位ΔD(t0〜t1)を加算することでも算出される。すなわち、算出部8は、S202で、履歴に残された位相差の計測結果φa(t0)から、波長λ1のままで絶対距離D(t1)のときの位相差φ’a(t1)を式8を用いて算出する。この時刻t1での波長可変レーザ1の光を用いた位相差φ’a(t1)は、式7で算出された位相差φa(t1)の補正値に当たる。
φ’a(t1)=2π{(φa(t0)/2π)+2ΔD(t0〜t1)/λ1}・・・(8)
ただし、
ΔD(t0〜t1)=(Λ34/2π)×{φ34(t1)−φ34(t0)}・・・(9)
【0044】
算出部8は、S111で、式10を用いて時刻t1での干渉次数M12(t1)を算出する。ここでΛ12は波長λ1とλ2の合成波長を表わす。
M12(t1)={2D(t1)/Λ12}−{(φa(t1)−φ’a(t1))/2π}・・・(10)
【0045】
算出部8は、S112で、合成波長Λ34による計測の干渉次数N34(t1)を算出する。また、算出部8は、S112で、波長λ2と合成波長Λ34の合成波長をΛ234による計測の干渉次数M23(t1)も算出する。まず、式10をD(t1)について解くと、式11のように変形される。
D(t1)=(Λ12/2)×{M12(t1)+(φa(t1)−φ’a(t1))/2π}・・・(11)
【0046】
D(t1)は、合成波長Λ34、合成波長Λ234を用いて式12、式13のように表わされる。
D(t1)=(Λ34/2)×{N34(t1)+(φ34(t1)/2π)}・・・(12)
D(t1)=(Λ234/2)×{M23(t1)+(φ34(t1)−φa(t1))/2π}・・・(13)
【0047】
式12、式13を用いてN34(t1)について解き、式11、式13を用いてM23(t1)について解くと、N34(t1)、M23(t1)は式14、式15でそれぞれ表わされる。
N34(t1)=round({M23(t1)+(φ34(t1)−φa(t1))/2π}(Λ234/Λ34)−{φ34(t1)/2π})・・・(14)
M23(t1)=round({M12(t1)+(φa(t1)−φ’a(t1))/2π}(Λ12/Λ234)−{(φ34(t1)−φa(t1))/2π})・・・(15)
【0048】
算出部8は、S111で求めたM12(t1)から式15を用いてM23(t1)を算出し、算出されたM23(t1)から式14を用いてN34(t1)を算出する。3つの合成波長Λ34、Λ234、Λ12にはΛ34<<Λ234<<Λ12の関係がある。最も波長の長いΛ12は最も計測レンジが大きく被検面7に段差が存在しても連続して計測可能であるが計測精度が低い。一方、最も波長の短い合成波長Λ34用いると最も高精度に被検面7の距離、形状が計測できるが、計測レンジが小さい。そのため、合成波長Λ34用いると段差がある時点で合成波長Λ34の干渉次数N34が不連続となる。しかし、時刻t=t1における合成波長Λ34の干渉次数N34(t1)が式14を用いて算出できる。
【0049】
S113において計算フラグが0の場合、つまり前回の走査区間の開始時刻t’0からt1までの間の被検面7の高低差がΛ34の半分以下である場合について説明する。この場合、算出部8は、S117において、S107に記録された干渉次数N34をS112で求められた干渉次N34(t1)に更新し計算ループに戻る。
【0050】
一方、S113において計算フラグが1の場合、つまり前回の走査区間の終了時刻t’0からt1までの間の被検面7の高低差がΛ34の半分以上である場合について説明する。S109で記憶した第1時刻taから第2時刻t1までの位相接続ができない為に第1時刻以降における絶対距離D(t)が算出されていない。ところで、t=t1における次数N34(t1)は、S112で求めて既知となっている。また、t=ta〜t1の間の合成波長Λ34の位相差の履歴は、S103でメモリ81に記憶されている。そこで、算出部8は、S114において、t=t1における次数N34(t1)とt=ta〜t1の間の合成波長Λ34の位相差の履歴とから式16を用いてt=ta〜t1の間の次数N34の履歴を逆算する。
N34(i+1)=N34(i)+round{φ34(i+1)−φ34(i)} ・・・(16)
【0051】
算出部8は、S115で式17を用いて合成波長Λ34の相対的な位相差の変化の履歴を用いて時刻taからt1までの間の被検面7の絶対距離D(t)を算出する。
D(t)=(Λ34/2)×{N34(t)+(φ34(t)/2π)} ・・・(17)
算出部8は、S116で計算フラグを0に戻し、S117において、S107に記録された干渉次数N34をS112で求められた干渉次数N34に更新し計算ループに戻る。S114、S115は第1算出部82で処理される計測ループとは別に、第2算出部83で計算することで計測ループ時間に遅延を発生させないようにすることができる。以上の通り、本実施形態によれば波長走査量の低減が可能となる為、簡易な構成で高速かつ計測レンジの広い計測装置を提供する事が出来る。
【0052】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。例えば、本実施形態では被検面の高低差が合成波長Λ34を超えた場合に干渉次数が不明となってしまうことに対する対策を説明した。同様に、光源からの光が一時的に遮断されることによって干渉次数が不明となる場合にも同じような対策が可能となる。また、ヘテロダイン干渉計の構成で説明したがホモダイン干渉計での構成でも構わない。
【特許請求の範囲】
【請求項1】
参照面に照射された参照光と被検面に照射された計測光との干渉によって生成された干渉縞を検出して前記被検面の位置又は形状を計測する計測装置であって、
第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する第1光源と、
第3波長を有する第2光を生成する第2光源と、
前記第1光源により生成された前記第1光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第1干渉縞を検出する第1検出器と、
前記第2光源により生成された前記第2光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第2干渉縞を検出する第2検出器と、
前記第2検出器により検出された前記第2干渉縞の位相のデータに基づき、前記第3波長を計測レンジを決定する計測波長として前記被検面の位置又は形状を算出する算出部と、
を備え、
前記第3波長は、前記第1波長及び前記第2波長の合成波長より短く、
前記算出部は、第1時刻より後の前記走査区間における前記第1干渉縞の位相の変化に基づいて前記第1時刻以降における前記第2干渉縞の次数を算出し、該算出された前記第2干渉縞の次数と前記第2干渉縞の位相のデータとを用いて前記第1時刻以降における前記被検面の位置又は形状を算出する、
ことを特徴とする計測装置。
【請求項2】
参照面に照射された参照光と被検面に照射された計測光との干渉によって生成された干渉縞を検出して前記被検面の位置又は形状を計測する計測装置であって、
第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する第1光源と、
第3波長を有する第2光を生成する第2光源と、
第4波長を有する第3光を生成する第3光源と、
前記第1光源により生成された前記第1光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第1干渉縞を検出する第1検出器と、
前記第2光源により生成された前記第2光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第2干渉縞を検出する第2検出器と、
前記第3光源により生成された前記第3光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第3干渉縞を検出する第3検出器と、
前記第2検出器及び前記第3検出器によりそれぞれ検出された前記第2干渉縞の位相のデータ及び前記第3干渉縞の位相のデータに基づき、前記第3波長及び前記第4波長の第1の合成波長を計測レンジを決定する計測波長として前記被検面の位置又は形状を算出する算出部と、
を備え、
前記第1の合成波長は、前記第1波長及び前記第2波長の第2の合成波長より短く、
前記算出部は、第1時刻において前記第2干渉縞の位相と第3干渉縞の位相との差で示される前記第1の合成波長の位相のデータから前記第1の合成波長の干渉次数が算出できなくなった場合に、前記第1時刻より後の前記走査区間における前記第1干渉縞の位相の変化に基づいて前記第1時刻以降における前記第1の合成波長の干渉次数を算出し、該算出された前記第1の合成波長の干渉次数と前記第1の合成波長の位相のデータとを用いて前記第1時刻以降における前記被検面の位置又は形状を算出する、
ことを特徴とする計測装置。
【請求項3】
前記算出部は、前記第1時刻より後の前記走査区間における前記第1干渉縞の位相の変化から前記区間が終了した第2時刻における前記第1干渉縞の次数を算出し、該第2時刻における前記第1干渉縞の次数から前記第2時刻における前記計測波長の干渉次数を算出し、該第2時刻における前記計測波長の干渉次数と前記第1時刻以降の前記計測波長の位相のデータとから前記第1時刻以降の前記計測波長の干渉次数を算出し、該算出された計測波長の干渉次数と前記計測波長の位相のデータとを用いて前記第1時刻以降における前記被検面の位置又は形状を算出する、ことを特徴とする請求項1又は請求項2に記載の計測装置。
【請求項4】
前記算出部は、
前記第1干渉縞及び前記計測波長の位相を算出し、該計測波長の位相のデータから前記計測波長の干渉次数が算出される場合に該計測波長の干渉次数を算出し、算出された前記計測波長の位相及び干渉次数に基づいて前記被検面の位置又は形状を算出する第1算出部と、
前記計測波長の位相のデータから前記計測波長の干渉次数が算出されなくなった場合に該計測波長の干渉次数を算出する第2算出部と、
を含む、ことを特徴とする請求項1乃至請求項3のいずれか1項に記載の計測装置。
【請求項5】
前記第1光源により生成された前記第1光と前記第2光源により生成された前記第2光とのそれぞれを第1光束と第2光束とに分割する第1偏光ビームスプリッタと、前記第2光束を一定の周波数で変調する変調部と、該変調部で変調された第2光束と前記第1光束とを合成する第2偏光ビームスプリッタとを前記第1光源及び前記第2光源と前記参照面及び前記被検面との間に備える、ことを特徴とする請求項1、請求項3及び請求項4のいずれか1項に記載の計測装置。
【請求項6】
前記第1光源により生成された前記第1光と前記第2光源により生成された前記第2光と前記第3光源により生成された前記第3光とのそれぞれを第1光束と第2光束とに分割する第1偏光ビームスプリッタと、前記第2光束を一定の周波数で変調する変調部と、該変調部で変調された第2光束と前記第1光束とを合成する第2偏光ビームスプリッタとを前記第1光源、前記第2光源及び前記第3光源と前記参照面及び前記被検面との間に備える、ことを特徴とする請求項2乃至請求項4のいずれか1項に記載の計測装置。
【請求項1】
参照面に照射された参照光と被検面に照射された計測光との干渉によって生成された干渉縞を検出して前記被検面の位置又は形状を計測する計測装置であって、
第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する第1光源と、
第3波長を有する第2光を生成する第2光源と、
前記第1光源により生成された前記第1光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第1干渉縞を検出する第1検出器と、
前記第2光源により生成された前記第2光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第2干渉縞を検出する第2検出器と、
前記第2検出器により検出された前記第2干渉縞の位相のデータに基づき、前記第3波長を計測レンジを決定する計測波長として前記被検面の位置又は形状を算出する算出部と、
を備え、
前記第3波長は、前記第1波長及び前記第2波長の合成波長より短く、
前記算出部は、第1時刻より後の前記走査区間における前記第1干渉縞の位相の変化に基づいて前記第1時刻以降における前記第2干渉縞の次数を算出し、該算出された前記第2干渉縞の次数と前記第2干渉縞の位相のデータとを用いて前記第1時刻以降における前記被検面の位置又は形状を算出する、
ことを特徴とする計測装置。
【請求項2】
参照面に照射された参照光と被検面に照射された計測光との干渉によって生成された干渉縞を検出して前記被検面の位置又は形状を計測する計測装置であって、
第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する第1光源と、
第3波長を有する第2光を生成する第2光源と、
第4波長を有する第3光を生成する第3光源と、
前記第1光源により生成された前記第1光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第1干渉縞を検出する第1検出器と、
前記第2光源により生成された前記第2光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第2干渉縞を検出する第2検出器と、
前記第3光源により生成された前記第3光を前記参照面及び前記被検面にそれぞれ照射することによって生成された第3干渉縞を検出する第3検出器と、
前記第2検出器及び前記第3検出器によりそれぞれ検出された前記第2干渉縞の位相のデータ及び前記第3干渉縞の位相のデータに基づき、前記第3波長及び前記第4波長の第1の合成波長を計測レンジを決定する計測波長として前記被検面の位置又は形状を算出する算出部と、
を備え、
前記第1の合成波長は、前記第1波長及び前記第2波長の第2の合成波長より短く、
前記算出部は、第1時刻において前記第2干渉縞の位相と第3干渉縞の位相との差で示される前記第1の合成波長の位相のデータから前記第1の合成波長の干渉次数が算出できなくなった場合に、前記第1時刻より後の前記走査区間における前記第1干渉縞の位相の変化に基づいて前記第1時刻以降における前記第1の合成波長の干渉次数を算出し、該算出された前記第1の合成波長の干渉次数と前記第1の合成波長の位相のデータとを用いて前記第1時刻以降における前記被検面の位置又は形状を算出する、
ことを特徴とする計測装置。
【請求項3】
前記算出部は、前記第1時刻より後の前記走査区間における前記第1干渉縞の位相の変化から前記区間が終了した第2時刻における前記第1干渉縞の次数を算出し、該第2時刻における前記第1干渉縞の次数から前記第2時刻における前記計測波長の干渉次数を算出し、該第2時刻における前記計測波長の干渉次数と前記第1時刻以降の前記計測波長の位相のデータとから前記第1時刻以降の前記計測波長の干渉次数を算出し、該算出された計測波長の干渉次数と前記計測波長の位相のデータとを用いて前記第1時刻以降における前記被検面の位置又は形状を算出する、ことを特徴とする請求項1又は請求項2に記載の計測装置。
【請求項4】
前記算出部は、
前記第1干渉縞及び前記計測波長の位相を算出し、該計測波長の位相のデータから前記計測波長の干渉次数が算出される場合に該計測波長の干渉次数を算出し、算出された前記計測波長の位相及び干渉次数に基づいて前記被検面の位置又は形状を算出する第1算出部と、
前記計測波長の位相のデータから前記計測波長の干渉次数が算出されなくなった場合に該計測波長の干渉次数を算出する第2算出部と、
を含む、ことを特徴とする請求項1乃至請求項3のいずれか1項に記載の計測装置。
【請求項5】
前記第1光源により生成された前記第1光と前記第2光源により生成された前記第2光とのそれぞれを第1光束と第2光束とに分割する第1偏光ビームスプリッタと、前記第2光束を一定の周波数で変調する変調部と、該変調部で変調された第2光束と前記第1光束とを合成する第2偏光ビームスプリッタとを前記第1光源及び前記第2光源と前記参照面及び前記被検面との間に備える、ことを特徴とする請求項1、請求項3及び請求項4のいずれか1項に記載の計測装置。
【請求項6】
前記第1光源により生成された前記第1光と前記第2光源により生成された前記第2光と前記第3光源により生成された前記第3光とのそれぞれを第1光束と第2光束とに分割する第1偏光ビームスプリッタと、前記第2光束を一定の周波数で変調する変調部と、該変調部で変調された第2光束と前記第1光束とを合成する第2偏光ビームスプリッタとを前記第1光源、前記第2光源及び前記第3光源と前記参照面及び前記被検面との間に備える、ことを特徴とする請求項2乃至請求項4のいずれか1項に記載の計測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−83581(P2013−83581A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−224306(P2011−224306)
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]