
計量装置
【課題】自然物のような単位重量の一定しない物品に対して、定重計量を行い、振り分け制御を行う場合において、歩留まりを向上させた計量装置を提供する。
【解決手段】計量手段、搬送手段、複数の集積場所、該集積場所毎に対応して設けられた振分手段と制御部とからなる計量装置とし、該制御部は、最終目標重量を設定する重量設定手段と、計量された物品の重量を集積場所毎に積算する積算手段と、前記積算重量と前記最終目標重量との差である最終目標重量差を集積場所毎に算出する算出手段と、前記最終目標重量、前記積算重量、前記最終目標重量差を記憶する記憶手段と、前記計量手段により計量された物品の重量と前期最終目標重量差とを比較する比較手段と、該比較結果に基づき前記最終目標重量差以上で、且つ、前記最終目標重量差に近い集積場所へ前記計量された物品を振り分ける振分制御手段を備える。
【解決手段】計量手段、搬送手段、複数の集積場所、該集積場所毎に対応して設けられた振分手段と制御部とからなる計量装置とし、該制御部は、最終目標重量を設定する重量設定手段と、計量された物品の重量を集積場所毎に積算する積算手段と、前記積算重量と前記最終目標重量との差である最終目標重量差を集積場所毎に算出する算出手段と、前記最終目標重量、前記積算重量、前記最終目標重量差を記憶する記憶手段と、前記計量手段により計量された物品の重量と前期最終目標重量差とを比較する比較手段と、該比較結果に基づき前記最終目標重量差以上で、且つ、前記最終目標重量差に近い集積場所へ前記計量された物品を振り分ける振分制御手段を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品を搬送中に計量し、所定場所への振分けを効率良く行う計量装置に関するものである。
【背景技術】
【0002】
コンベア等により運ばれてくる多数の物品を、一箇所毎に設定された所定の目標重量を満たすよう行う箱詰め作業は、人手に頼るとすれば極めて効率が悪い。そして該物品の重量が個々に異なる場合には、一層、非効率となる。
【0003】
そこで、搬入コンベアから搬入されてきた物品の単重を、該コンベアに連設した計量装置により搬送中に計量し、該物品を所定の場所に振り分け、且つ、その所定の場所毎に重量を積算し、目標重量以上とする計量装置が提案されている(特許文献1参照。)。
【特許文献1】特開平5−57253号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術によれば、一箇所に対する目標重量と、実際に振り分けられた物品の積算重量とが、かけ離れてしまう場合が起こりうる。
例えば、レタスやキャベツといった自然物を、一箇所当たりに設定された5000gの目標重量を満たすべく集積する場合、一の箱のそれまでの実際の積算重量が4,850gであれば、該目標重量に満たないと判断され、次に搬入されてきた物品の単重が500g程度のものであっても、該物品を投下して設定目標重量以上にする必要がある。
【0005】
しかし、ここで歩留まりの問題が指摘される。つまり、自然物の場合、単重が一定しておらず、上記ケースにおいて最後の一個が400gの物品であれば最終積算重量は5,250gになるが、600gの物品であれば、最終積算重量は5,450gとなる。つまり、重量差として200gの歩留まりの低下となってしまう。
【0006】
そして、一箱当たり重量差として200gの歩留まりが発生した場合、仮に前記先行技術文献における一の選別コンベアに20個の収容箱を設置していたとすれば、計4,000gもの歩留まりの低下となる。更に、作業効率化の観点から一度に設置する収容箱の数を多くすればするほど、一層の歩留まりの低下をもたらすこととなる。
このような歩留まり低下がもたらすコストは、生産者、若しくは消費者等への負担となりうることから、係る計量装置に対して、根本的に改善の余地があるとされてきた。
【0007】
本発明は、自然物のような単位重量の一定しない物品に対して、定量計量する場合に、所定の振り分け処理を行うことにより、歩留まりを向上させた計量装置を提供することを課題としている。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は次の構成とした。すなわち、請求項1に記載の計量装置は、物品の重量を計量する計量手段と、該計量手段の下流に設けられ計量済み物品を搬送する搬送手段と、該搬送手段により搬送された物品を集積させる複数の集積場所と、該集積場所へ物品を振り分けるために該集積場所毎に対応して設けられた振分手段と、制御部とからなる計量装置であって、該制御部は、前記集積場所に複数の物品を集積させる最終目標重量を設定する重量設定手段と、前記計量手段により計量された重量を集積場所毎に積算する積算手段と、前記積算手段により積算された積算重量と、前記最終重量との差である最終目標重量差を集積場所毎に算出する算出手段と、前記最終目標重量と、前記積算重量と、前記最終目標重量差を記憶する記憶手段と、前記計量手段により計量された物品の重量と前記最終目標重量差とを比較する比較手段と、該比較結果に基づき前記最終目標重量差以上で、且つ、前記最終目標重量差に近い集積場所へ前記計量された物品を振り分ける振分制御手段とからなることを特徴としている。
【0009】
また、請求項2に記載の計量装置は、請求項1に記載の構成において、前記算出手段は、前記中間目標重量と前記積算重量との差である中間目標重量差を算出し、前記記憶手段は中間目標重量と、前記中間目標重量差を記憶し、前記比較手段は、前記計量手段によって計量された物品の重量と前記中間目標重量差とを比較し、前記振分制御手段は、該比較結果に基づき、前記中間目標重量差に近い集積場所へ前記計量された物品を振り分けることを特徴としている。
【0010】
更に、請求項3に記載の計量装置は、請求項2に記載の構成において、前記中間目標重量は、計量済みの物品の重量から算出される平均単重に基づき算出されることを特徴としている。
【発明の効果】
【0011】
請求項1に記載の計量装置によれば、積算重量と最終目標重量との比較に基づく振分調整を、最終投下順目において処理することによって、歩留まりを向上させることが可能となり、集積した物品総重量の均一化が担保されることとなり、出荷製品の品質の向上が図れる。
【0012】
また、請求項2に記載の構成によれば、積算重量と中間目標重量との比較結果に基づく振分調整を、投下順目毎、複数回に分けて行うこととするため、更なる歩留まりの向上が可能となる。そして、請求項1に記載の計量装置に係る最終投下順目における処理との効果と相俟って、集積した物品の総重量の均一化がより一層、担保されることとなる。
【0013】
更に、請求項3に記載の構成によれば、中間目標重量の設定が、実際の物品重量に基づくこととなるため、より現実的に歩留まりの向上が図れ、集積した物品の総重量の均一化という出荷物品全体の品質向上が担保されることとなるのである。
【発明を実施するための最良の形態】
【0014】
本実施の形態は、個々の重量が均一でないレタスのような自然物(以下、物品Pと称す。)をD1〜Diまでの各集積場所へ集積する計量装置に関するものであり、更に詳しくは、中間目標重量及び最終目標重量に基づき、物品Pを各集積場所へ投下すべく振り分け可能とした計量装置に関するものである。
【0015】
図1は本発明の実施の形態を示す機能ブロック図、図2は本発明の実施の形態の処理手順を示すフロー図、図3は本発明の実施の形態に係る計量装置の概略図、図4は本発明の実施の形態を示す概念図である。
【0016】
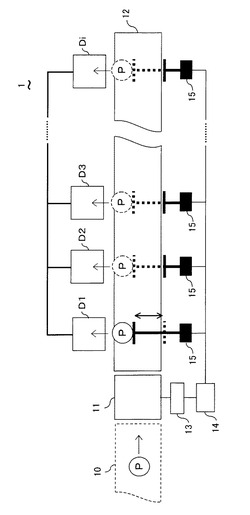
図3中、10は搬入コンベア、11は計量コンベア、12は搬送コンベア、13は計量手段、14は制御部、15は振分手段、Pは物品、Dは集積場所である。
【0017】
〔計量装置1の概要〕
図3において、搬入コンベア10は物品Pを計量コンベア11へ搬入する。該計量コンベア11には本発明を構成する計量手段13が連設されており、前記搬入コンベア10から物品が一個ずつ搬入されると、該計量手段13は、その一個ずつの物品Pの重量を計量し、該計量結果を制御部14へ出力する。
【0018】
搬送コンベア12は、計量コンベア11から送られてきた物品Pを、後に詳述する所定の処理に従って各集積場所D1〜Diまでの搬送を行う。
【0019】
振分手段15は、後述する振分制御手段の信号に従って、搬送コンベア12により搬送される物品Pを所定の集積場所Dへ投下する。
【0020】
〔制御部14の構成及びその機能〕
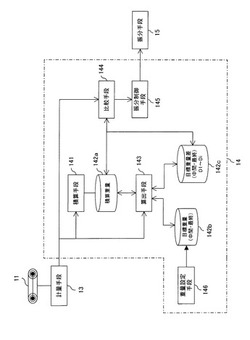
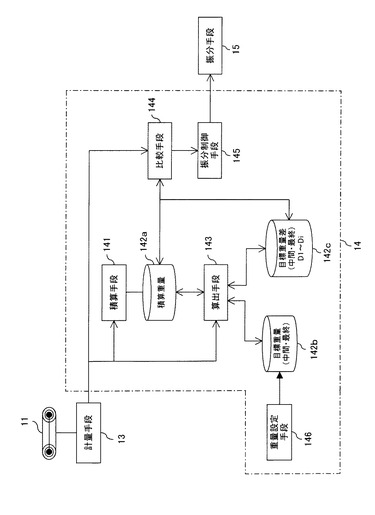
図1において、制御部14は、積算手段141、記憶手段142、算出手段143、比較手段144、振分制御手段145、重量設定手段146とからなり、各手段の有する機能を総括的に制御する。各手段の機能は以下に掲げる通りである。
【0021】
重量設定手段146は、集積場所一箇所当たりの最終目標重量を、図示しないテンキー等により設定する機能を司る。尚、必要に応じて、投下順目毎の目標重量とする中間目標重量を固定して設定することも可能である。
【0022】
最終目標重量とは、集積場所一箇所当たりに投下する物品Pの最終目標合計重量であり、中間目標重量とは、投下1順目にD1〜Diまでの全ての集積場所へ物品Pを1つずつ投下した後、投下2順目以降、投下(N−1)順目までの各投下順目の目標重量となる重量である。尚、N順目とは最終目標重量を満たす最終投下順目をいう。
ここで前記中間目標重量は、重量設定手段により固定して設定された重量である場合の他、先の投下順目若しくは先の投下順目までの投下結果から得た平均単重に基づき算出された重量である場合とがある。
【0023】
積算手段141は、各集積場所D1〜Diにおける積算重量を投下順目毎に算出する機能を司る。
【0024】
算出手段143は、先の投下順目若しくは先の投下順目までの投下結果から物品の平均単重を算出し、該算出値に基づき算出された中間目標重量、又は、重量設定手段146により固定して設定された中間目標重量と、各集積場所D1〜Diにおける積算重量との差である中間目標重量差を算出する機能を司る。
また、重量設定手段146により設定された最終目標重量と、積算手段により算出された各集積場所D1〜Diの各積算重量との差である最終目標重量差を算出する機能を司る。
【0025】
記憶手段142は、記憶手段142aが集積場所D1〜Di毎の積算重量を記憶し、記憶手段142bが中間目標重量と最終目標重量を記憶し、記憶手段142cが集積場所D1〜Di毎の中間目標重量差と、集積場所D1〜Di毎の最終目標重量差を記憶する機能を司る。
【0026】
比較手段144は、各集積場所D1〜Diの個々の中間目標重量差と、新たに搬入された一の物品の重量との差を、夫々比較する機能を司る。また、各集積場所D1〜Diの個々の最終目標重量差と、新たに搬入されてきた一の物品の重量との差を、夫々比較する機能を司る。
【0027】
振分制御手段145は、投下(N−1)順目までの中間時の振り分け時においては、前記比較結果に基づき、新たに搬入された物品Pと、最も近しい中間目標重量差を有する特定の集積場所Dを認識し、該集積場所Dへ該物品Pを投下すべく振分手段14を作動させる信号を送信する機能を司る。
一方、N順目の振り分け時においては、前記比較結果に基づき、最終目標重量差以上であって、且つ、新たに搬入された物品Pと最も近しい最終目標重量差を有する特定の集積場所Dを認識し、該集積場所Dへ該物品Pを投下すべく振分手段15を作動させる信号を送信する機能を司る。
【0028】
〔振り分け制御の仕組み〕
以下に、本発明に係る計量装置による具体的な振り分け制御の仕組みについて説明する。本実施の形態においては、集積場所をD1〜D6までの6つの集積場所を設けることとし、最終目標重量は、重量設定手段146により5000gに設定したものとする。
【0029】
〔投下1順目〕
まず、図1及び図2に基づき、投下1順目につき説明する。
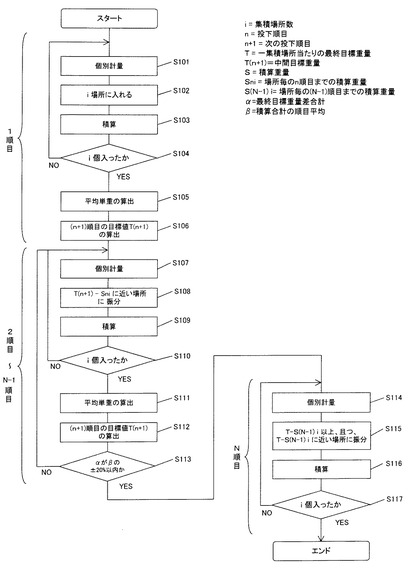
投下1順目は、搬入コンベア10から投下1順目の物品Pが、個々に搬入され、計量コンベア11に連設した計量手段13により計量される(S101)。該物品Pは、D1〜D6までの各集積場所へ、振分手段15により順に投下され(S102)、その際、該計量重量が、投下された集積場所毎の積算重量として記憶手段142aの所定の格納領域へ格納される(S103)。
【0030】
D1〜D6までの全ての集積場所への物品Pの投下が確認されると(S104)、算出手段143により投下1順目の平均単重が算出される(S105)。そして、該平均単重の2倍の値が2順目(n+1順目)の中間目標重量T(n+1)として算出され(S106)、記憶手段142bの所定の格納領域へ格納される。
【0031】
そして、次に2順目における中間目標重量差T(n+1)−Sniが、算出手段143によって、集積場所毎に算出され、記憶手段142cの所定の格納領域へ格納される。
【0032】
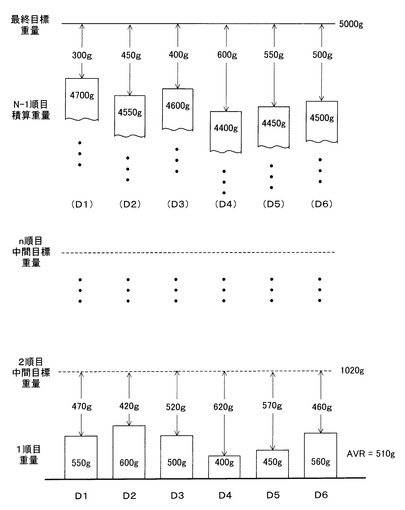
以上、投下1順目に関し、更に図4に基づき具体的な数値を参照しつつ説明する。
本実施の形態において、D1〜D6までの投下1順目に集積された集積場所毎の物品Pの重量は、夫々、550g、600g、500g、400g、450g、560gである。この場合、算出手段143は、D1〜D6までの平均単重((550g+600g+500g+400g+450g+560g)/6=510g)を算出した後、該算出値を2倍して投下2順目の中間目標重量として1,020gを算出する。そして、該目標重量は記憶手段142bの所定の格納領域へ格納される。
【0033】
次に、2順目における中間目標重量差T(n+1)−Sniが、前記中間目標重量1020gと、1順目に各集積場所に投下された物品Pの重量との差により算出される。即ち、集積場所D1においては、該中間目標重量差は470gと算出され、集積場所D2以下、同様に420g、520g、620g、570g、460gが、夫々投下2順目の中間目標重量に不足する重量として算出される。
尚、係る数値は、算出後、各集積場所D1〜D6に夫々対応する中間目標重量差として記憶手段142cの所定の格納領域へ格納される。
【0034】
〔投下2順目〕
次に、図1及び図2に基づき、投下2順目につき説明する。
搬入コンベア10から投下2順目の物品Pが、個々に搬入され、計量コンベア11に連設した計量手段13により単重が計量されると(S107)、該計量重量は比較手段144へ送信される。ここで、該比較手段144は各集積場所D1〜D6が有する投下2順目の中間目標重量差を記憶手段142cから抽出し、該抽出した各重量差と、前記計量された物品Pの単重との比較を行う。
該比較結果は振分制御手段145へ送信され、該振分制御手段145は、前記計量された物品Pの単重と最も近しい中間目標重量差T(n+1)−Sniを有する集積場所Dへ投下するよう、各集積場所D1〜D6に対応して設けられた振分手段15を作動させるべく信号を送る。そして該信号を受けた該振分手段15により該物品Pが所定の集積場所Dへ投下されることとなる(S108)。
【0035】
振り分けられた前記物品Pの単重は、該物品Pが投下された集積場所Dの積算重量として積算され(S109)、投下された集積場所毎の積算重量として記憶手段142aの所定の格納領域へ格納される。
【0036】
D1〜D6まで全ての集積場所への投下が確認された後(S110)、算出手段143により投下2順目の平均単重が算出され(S111)、該平均単重の3倍の値が、3順目(n+1順目)の中間目標重量T(n+1)として算出され(S112)、記憶手段142bの所定の格納領域へ格納される。
【0037】
そして、次に3順目における中間目標重量差T(n+1)−Sniが、算出手段143によって算出され、記憶手段142cの所定の格納領域へ格納される。
【0038】
以上、投下2順目に関し、更に図4に基づき具体的な数値を参照しつつ、振り分け制御の一例を挙げて説明する。
仮に、投下2順目の最初に搬入された物品Pの重量が425gであったとすると、該重量と各集積場所D1〜D6が有する投下2順目の中間目標重量差との比較が、夫々、行われ、該重量は集積場所D2が有する中間目標重量差420gと最も近しいとの比較結果に基づき、集積場所D2へ投下される。
【0039】
以下、2つ目以降の物品についても同様の処理を繰り返し、D1〜D6まで全て物品が投下されたことを確認し(S110)、投下2順目の集積処理が終了する。
【0040】
引き続き投下3順目、4順目、…投下(N−1)順目に至るまでは、前述のS107からS112までと同様の処理が行われるが、投下2順目以降、投下(N−1)順目においては、D1〜D6まで全ての集積場所Dへ物品Pが投下されたことが確認された後(S110)、次の順目が、N順目、即ち、最終の投下順目であるか否かの判断処理が行われる(S113)。以下、詳述する。
【0041】
〔最終の投下順目であるか否かの判断処理〕
次の投下順目が最終の投下順目であるか否かは、集積場所D1〜Diにおける最終目標重量差合計(以下、αと称す。)と、投下(N−1)順目までの集積場所D1〜Diにおける積算重量の順目平均(以下、βと称す。)とを比較による。即ち、前記αが前記βの±20%以内であるか否かで、次の投下順目が最終の投下順目であるか否が判断されることとなる。
【0042】
前述の通り、各投下順目において積算手段141が投下順目毎に集積場所D1〜Di毎に投下物品の積算を行う一方、算出手段143は、投下順目毎に該積算結果と最終目標重量との差を算出するとともに、集積場所D1〜Diにおける該重量差合計αを算出する。
【0043】
更に、算出手段143は、積算重量の順目当たりの平均重量βを投下順目毎に算出する。尚、前記α及び前記βは、算出後、記憶手段142aの所定の格納領域へ格納される。
【0044】
そして、各順目における、i個入ったか否かの確認処理(S110)を経て、次順の目標重量を算出した(S111、S112)後、算出手段143は、前記αが前記βの±20%以内であるか否かを判断する(S113)。
【0045】
この時、前記αが前記βの±20%以内でなければ、次の投下順目は、まだ最終投下順目でないと判断し、次順の振り分け制御は、前述の通り、中間目標重量差に近い集積場所Dへ振り分けられる。
一方、前記αが前記βの±20%以内となれば、次の投下順目が最終投下順目と判断し、後に詳述する最終投下順目特有の振り分け制御によることとなる。
【0046】
以上、最終の投下順目であるか否かの判断処理に関し、更に、具体的な数値に基づき図4を参照しながら説明する。
集積場所D1〜D6までの投下(N−1)順目までの各積算重量が図4に示す如くであった場合に、前記αは、集積場所D1〜D6までの各最終目標重量差300g、450g、400g、600g、550g、500gの合計重量2,800gとなる。
一方、前記βは、仮に図4に示す投下(N−1)順目が投下9順目であったとすれば、各集積場所の積算重量が4,700g、4,550g、4,600g、4,400g、4,450g、4,500gであることより、約3,020g(≒ 4700/9 + 4550/9 + 4600/9 + 4400/9 + 4450/9 + 4500/9)となる。
【0047】
そして該重量(3,020g)の前後20%の重量(2,416g/3,624g)を、算出手段143が算出し、該重量範囲内に前記α(2,800g)が含まれるか否か、比較手段144により比較判断されることとなる(S113)。
本実施の形態においては、2,416g<2,800g<3,624gであることから、前期αが該重量範囲内にあると判断され、次の投下順目が最終投下順目であると認識される。
【0048】
〔最終投下順目の振り分け制御〕
最終投下順目の振り分け制御について説明する。
N順目、即ち、最終投下順目の振り分け制御は、搬入された物品Pの重量が、最終目標重量Tと集積場所毎の投下(N−1)順目までの積算重量S(N−1)iとの差以上の重量であり、且つ、その差に最も近い一の集積場所Dへ該物品を振り分けるというものである。
【0049】
更に、具体的な数値に基づき、図を参照しながら説明する。
投下(N−1)順目終了時におけるD1〜D6までの集積場所毎の積算重量が、図4に示すように、D1から順に4,700g、4,550g、4,600g、4,400g、4,450g、4,500gであるとする。尚、該積算重量は積算手段141により、各集積場所D1〜D6につき投下1順目から投下順目毎に積算され、記憶手段142aの所定の格納領域に格納されている。
【0050】
この時点において、各集積場所が前記最終目標重量に不足する重量である最終目標重量差が、算出手段143により算出されている。D1は、あと300gで最終目標重量に達することを示す。D2以下、同様、順に450g、400g、600g、550g、500gが各集積場所に係る最終目標重量に不足する重量である。係る数値は、算出後、各集積場所の最終目標重量差として記憶手段142cの所定の格納領域に格納されている。
【0051】
投下N順目に際し、搬入コンベア10から物品Pが新たに搬入され、計量コンベア11に連設した計量手段13により該物品Pの単重が計量されると(S114)、該物品重量は比較手段144へ送られる。この時、該比較手段144は、記憶手段142cに記憶されている各集積場所D1〜D6の個々の最終目標重量差を抽出して集積場所毎に該物品重量との比較を行い、該比較結果及び各集積場所の最終目標重量差を振分制御手段145へ送る(図1)。
【0052】
上記比較結果を受け取った振分制御手段145は、該比較結果に基づき、該物品重量が各集積場所の有する最終目標重量差T-S(N−1)i以上であり、且つ、該重量差に最も近しい値を有する一の集積場所Dを決定し、該集積場所Dへ該物品Pを投下するよう振分手段15を作動させる(S115)。
【0053】
仮に、最終の投下順目に際し、搬入コンベア10から搬入されてきた物品Pの重量が575gであった場合、比較手段144により、最も近しいD4、D5が判断され、該比較結果及び該集積場所に係る最終目標重量差が振分制御手段145へ送信される。ここで振分制御手段145は、該物品Pの重量(575g)と、D4に係る最終目標重量差(600g)及びD5に係る最終目標重量差(550g)との比較判断の下、該物品Pの重量がD5の最終目標重量以上であることを認識する。そして、搬送コンベア12上の該物品Pを集積場所D5へ投下するよう、該集積場所D5に対応して設けられた振分手段15を作動させるべく信号を送る。振り分け後は、集積場所毎に投下物品の重量積算が行われ、最終的な集積重量を算出する(S116)。
【0054】
以下、同様の処理を繰り返し、D1〜D6まで全て物品が投下されたことを確認し(S117)、一連の集積処理が終了する。
【0055】
上記実施の形態によれば、投下物品の実重量に基づく投下順目毎の振分調整により集積場所間の均一化が図れ、且つ、最終段階における振分調整による歩留まり向上効果とが相俟って、最終的に集積場所間の重量の均一化及び出荷製品全体の品質の向上を図ることができる。
【0056】
〔上記実施の形態の変形例〕
以上、本発明の実施の形態について説明したが、この発明は上記の例に限定されるものではない。
(1)上記実施の形態においては、投下2順目以降、投下(N−1)順目までの各順目において、中間目標重量差に基づき振り分け制御を行っていたが、これに限らず、投下2順目以降、投下(N−1)順目に至るまで、物品PをD1〜Diまでの各集積場所へ順に投下する一方、前述の最終投下順目確認処理のみを行うことでN順目を判断し、上述の最終目標重量差に基づき振り分け制御を行うこととしても良い。
係る変形例によっても、歩留まりを向上させ、集積した物品総重量の均一化に加え、出荷製品の品質の向上を図ることが可能となる。
【0057】
(2)また、上記実施の形態においては、中間目標重量を平均単重に基づき算出していたが、これに限らず、予め単重を固定的に設定することとしても良い。
例えば、上記実施の形態において、物品Pの単重を500gと固定的に設定することで、投下2順目は1,000g、投下3順目は1,500g、…と投下順目の倍数を該固定した設定重量に乗じて得られる中間目標重量に基づき、振り分け制御を行うこととしても良い。
係る変形例によっても、上記実施の形態において得られる効果と同程度の効果が発揮される。
【0058】
(3)更に、上記実施の形態及び前記変形例(1)においては、次の投下順目が最終の投下順目であるか否かは、集積場所D1〜Diにおける最終目標重量差合計αと、投下(N−1)順目までの集積場所D1〜Diにおける積算重量の順目平均βとを比較した場合において、前記αが前記βの±20%以内であるか否かで判断することとしていたが、これに限らず、一の集積場所へ投下する物品の投下予定個数を、予め固定的に定めておくこととしても良い。
即ち、投下順目毎に該投下予定個数から一つずつ減じる処理を行い、若しくは、投下順目毎に投下個数を累積し、該投下予定個数と該累積個数との差を認識させることで、次順目が、最終投下順目であるか否かを判断させることとしても良い。
係る変形例によっても、上記実施の形態等において得られる効果と同程度の効果が発揮される。
【産業上の利用可能性】
【0059】
本発明の計量装置は、自然物はもとより、単重にバラツキのある種々の物品等を所定の集積場所へ集積するといった定量計量に資する発明であるといえる。
【図面の簡単な説明】
【0060】
【図1】本発明の実施の形態を示す機能ブロック図である。
【図2】本発明の実施の形態の処理手順を示すフロー図である。
【図3】本発明の実施の形態に係る計量装置の概略図である。
【図4】本発明の実施の形態を示す概念図である。
【符号の説明】
【0061】
1 本発明に係る計量装置
10 搬入コンベア
11 計量コンベア
12 搬送コンベア
13 計量手段
14 制御部
141 積算手段
142 記憶手段
143 算出手段
144 比較手段
145 振分制御手段
146 重量設定手段
15 振分手段
P 物品
D 集積場所
【技術分野】
【0001】
本発明は、物品を搬送中に計量し、所定場所への振分けを効率良く行う計量装置に関するものである。
【背景技術】
【0002】
コンベア等により運ばれてくる多数の物品を、一箇所毎に設定された所定の目標重量を満たすよう行う箱詰め作業は、人手に頼るとすれば極めて効率が悪い。そして該物品の重量が個々に異なる場合には、一層、非効率となる。
【0003】
そこで、搬入コンベアから搬入されてきた物品の単重を、該コンベアに連設した計量装置により搬送中に計量し、該物品を所定の場所に振り分け、且つ、その所定の場所毎に重量を積算し、目標重量以上とする計量装置が提案されている(特許文献1参照。)。
【特許文献1】特開平5−57253号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術によれば、一箇所に対する目標重量と、実際に振り分けられた物品の積算重量とが、かけ離れてしまう場合が起こりうる。
例えば、レタスやキャベツといった自然物を、一箇所当たりに設定された5000gの目標重量を満たすべく集積する場合、一の箱のそれまでの実際の積算重量が4,850gであれば、該目標重量に満たないと判断され、次に搬入されてきた物品の単重が500g程度のものであっても、該物品を投下して設定目標重量以上にする必要がある。
【0005】
しかし、ここで歩留まりの問題が指摘される。つまり、自然物の場合、単重が一定しておらず、上記ケースにおいて最後の一個が400gの物品であれば最終積算重量は5,250gになるが、600gの物品であれば、最終積算重量は5,450gとなる。つまり、重量差として200gの歩留まりの低下となってしまう。
【0006】
そして、一箱当たり重量差として200gの歩留まりが発生した場合、仮に前記先行技術文献における一の選別コンベアに20個の収容箱を設置していたとすれば、計4,000gもの歩留まりの低下となる。更に、作業効率化の観点から一度に設置する収容箱の数を多くすればするほど、一層の歩留まりの低下をもたらすこととなる。
このような歩留まり低下がもたらすコストは、生産者、若しくは消費者等への負担となりうることから、係る計量装置に対して、根本的に改善の余地があるとされてきた。
【0007】
本発明は、自然物のような単位重量の一定しない物品に対して、定量計量する場合に、所定の振り分け処理を行うことにより、歩留まりを向上させた計量装置を提供することを課題としている。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は次の構成とした。すなわち、請求項1に記載の計量装置は、物品の重量を計量する計量手段と、該計量手段の下流に設けられ計量済み物品を搬送する搬送手段と、該搬送手段により搬送された物品を集積させる複数の集積場所と、該集積場所へ物品を振り分けるために該集積場所毎に対応して設けられた振分手段と、制御部とからなる計量装置であって、該制御部は、前記集積場所に複数の物品を集積させる最終目標重量を設定する重量設定手段と、前記計量手段により計量された重量を集積場所毎に積算する積算手段と、前記積算手段により積算された積算重量と、前記最終重量との差である最終目標重量差を集積場所毎に算出する算出手段と、前記最終目標重量と、前記積算重量と、前記最終目標重量差を記憶する記憶手段と、前記計量手段により計量された物品の重量と前記最終目標重量差とを比較する比較手段と、該比較結果に基づき前記最終目標重量差以上で、且つ、前記最終目標重量差に近い集積場所へ前記計量された物品を振り分ける振分制御手段とからなることを特徴としている。
【0009】
また、請求項2に記載の計量装置は、請求項1に記載の構成において、前記算出手段は、前記中間目標重量と前記積算重量との差である中間目標重量差を算出し、前記記憶手段は中間目標重量と、前記中間目標重量差を記憶し、前記比較手段は、前記計量手段によって計量された物品の重量と前記中間目標重量差とを比較し、前記振分制御手段は、該比較結果に基づき、前記中間目標重量差に近い集積場所へ前記計量された物品を振り分けることを特徴としている。
【0010】
更に、請求項3に記載の計量装置は、請求項2に記載の構成において、前記中間目標重量は、計量済みの物品の重量から算出される平均単重に基づき算出されることを特徴としている。
【発明の効果】
【0011】
請求項1に記載の計量装置によれば、積算重量と最終目標重量との比較に基づく振分調整を、最終投下順目において処理することによって、歩留まりを向上させることが可能となり、集積した物品総重量の均一化が担保されることとなり、出荷製品の品質の向上が図れる。
【0012】
また、請求項2に記載の構成によれば、積算重量と中間目標重量との比較結果に基づく振分調整を、投下順目毎、複数回に分けて行うこととするため、更なる歩留まりの向上が可能となる。そして、請求項1に記載の計量装置に係る最終投下順目における処理との効果と相俟って、集積した物品の総重量の均一化がより一層、担保されることとなる。
【0013】
更に、請求項3に記載の構成によれば、中間目標重量の設定が、実際の物品重量に基づくこととなるため、より現実的に歩留まりの向上が図れ、集積した物品の総重量の均一化という出荷物品全体の品質向上が担保されることとなるのである。
【発明を実施するための最良の形態】
【0014】
本実施の形態は、個々の重量が均一でないレタスのような自然物(以下、物品Pと称す。)をD1〜Diまでの各集積場所へ集積する計量装置に関するものであり、更に詳しくは、中間目標重量及び最終目標重量に基づき、物品Pを各集積場所へ投下すべく振り分け可能とした計量装置に関するものである。
【0015】
図1は本発明の実施の形態を示す機能ブロック図、図2は本発明の実施の形態の処理手順を示すフロー図、図3は本発明の実施の形態に係る計量装置の概略図、図4は本発明の実施の形態を示す概念図である。
【0016】
図3中、10は搬入コンベア、11は計量コンベア、12は搬送コンベア、13は計量手段、14は制御部、15は振分手段、Pは物品、Dは集積場所である。
【0017】
〔計量装置1の概要〕
図3において、搬入コンベア10は物品Pを計量コンベア11へ搬入する。該計量コンベア11には本発明を構成する計量手段13が連設されており、前記搬入コンベア10から物品が一個ずつ搬入されると、該計量手段13は、その一個ずつの物品Pの重量を計量し、該計量結果を制御部14へ出力する。
【0018】
搬送コンベア12は、計量コンベア11から送られてきた物品Pを、後に詳述する所定の処理に従って各集積場所D1〜Diまでの搬送を行う。
【0019】
振分手段15は、後述する振分制御手段の信号に従って、搬送コンベア12により搬送される物品Pを所定の集積場所Dへ投下する。
【0020】
〔制御部14の構成及びその機能〕
図1において、制御部14は、積算手段141、記憶手段142、算出手段143、比較手段144、振分制御手段145、重量設定手段146とからなり、各手段の有する機能を総括的に制御する。各手段の機能は以下に掲げる通りである。
【0021】
重量設定手段146は、集積場所一箇所当たりの最終目標重量を、図示しないテンキー等により設定する機能を司る。尚、必要に応じて、投下順目毎の目標重量とする中間目標重量を固定して設定することも可能である。
【0022】
最終目標重量とは、集積場所一箇所当たりに投下する物品Pの最終目標合計重量であり、中間目標重量とは、投下1順目にD1〜Diまでの全ての集積場所へ物品Pを1つずつ投下した後、投下2順目以降、投下(N−1)順目までの各投下順目の目標重量となる重量である。尚、N順目とは最終目標重量を満たす最終投下順目をいう。
ここで前記中間目標重量は、重量設定手段により固定して設定された重量である場合の他、先の投下順目若しくは先の投下順目までの投下結果から得た平均単重に基づき算出された重量である場合とがある。
【0023】
積算手段141は、各集積場所D1〜Diにおける積算重量を投下順目毎に算出する機能を司る。
【0024】
算出手段143は、先の投下順目若しくは先の投下順目までの投下結果から物品の平均単重を算出し、該算出値に基づき算出された中間目標重量、又は、重量設定手段146により固定して設定された中間目標重量と、各集積場所D1〜Diにおける積算重量との差である中間目標重量差を算出する機能を司る。
また、重量設定手段146により設定された最終目標重量と、積算手段により算出された各集積場所D1〜Diの各積算重量との差である最終目標重量差を算出する機能を司る。
【0025】
記憶手段142は、記憶手段142aが集積場所D1〜Di毎の積算重量を記憶し、記憶手段142bが中間目標重量と最終目標重量を記憶し、記憶手段142cが集積場所D1〜Di毎の中間目標重量差と、集積場所D1〜Di毎の最終目標重量差を記憶する機能を司る。
【0026】
比較手段144は、各集積場所D1〜Diの個々の中間目標重量差と、新たに搬入された一の物品の重量との差を、夫々比較する機能を司る。また、各集積場所D1〜Diの個々の最終目標重量差と、新たに搬入されてきた一の物品の重量との差を、夫々比較する機能を司る。
【0027】
振分制御手段145は、投下(N−1)順目までの中間時の振り分け時においては、前記比較結果に基づき、新たに搬入された物品Pと、最も近しい中間目標重量差を有する特定の集積場所Dを認識し、該集積場所Dへ該物品Pを投下すべく振分手段14を作動させる信号を送信する機能を司る。
一方、N順目の振り分け時においては、前記比較結果に基づき、最終目標重量差以上であって、且つ、新たに搬入された物品Pと最も近しい最終目標重量差を有する特定の集積場所Dを認識し、該集積場所Dへ該物品Pを投下すべく振分手段15を作動させる信号を送信する機能を司る。
【0028】
〔振り分け制御の仕組み〕
以下に、本発明に係る計量装置による具体的な振り分け制御の仕組みについて説明する。本実施の形態においては、集積場所をD1〜D6までの6つの集積場所を設けることとし、最終目標重量は、重量設定手段146により5000gに設定したものとする。
【0029】
〔投下1順目〕
まず、図1及び図2に基づき、投下1順目につき説明する。
投下1順目は、搬入コンベア10から投下1順目の物品Pが、個々に搬入され、計量コンベア11に連設した計量手段13により計量される(S101)。該物品Pは、D1〜D6までの各集積場所へ、振分手段15により順に投下され(S102)、その際、該計量重量が、投下された集積場所毎の積算重量として記憶手段142aの所定の格納領域へ格納される(S103)。
【0030】
D1〜D6までの全ての集積場所への物品Pの投下が確認されると(S104)、算出手段143により投下1順目の平均単重が算出される(S105)。そして、該平均単重の2倍の値が2順目(n+1順目)の中間目標重量T(n+1)として算出され(S106)、記憶手段142bの所定の格納領域へ格納される。
【0031】
そして、次に2順目における中間目標重量差T(n+1)−Sniが、算出手段143によって、集積場所毎に算出され、記憶手段142cの所定の格納領域へ格納される。
【0032】
以上、投下1順目に関し、更に図4に基づき具体的な数値を参照しつつ説明する。
本実施の形態において、D1〜D6までの投下1順目に集積された集積場所毎の物品Pの重量は、夫々、550g、600g、500g、400g、450g、560gである。この場合、算出手段143は、D1〜D6までの平均単重((550g+600g+500g+400g+450g+560g)/6=510g)を算出した後、該算出値を2倍して投下2順目の中間目標重量として1,020gを算出する。そして、該目標重量は記憶手段142bの所定の格納領域へ格納される。
【0033】
次に、2順目における中間目標重量差T(n+1)−Sniが、前記中間目標重量1020gと、1順目に各集積場所に投下された物品Pの重量との差により算出される。即ち、集積場所D1においては、該中間目標重量差は470gと算出され、集積場所D2以下、同様に420g、520g、620g、570g、460gが、夫々投下2順目の中間目標重量に不足する重量として算出される。
尚、係る数値は、算出後、各集積場所D1〜D6に夫々対応する中間目標重量差として記憶手段142cの所定の格納領域へ格納される。
【0034】
〔投下2順目〕
次に、図1及び図2に基づき、投下2順目につき説明する。
搬入コンベア10から投下2順目の物品Pが、個々に搬入され、計量コンベア11に連設した計量手段13により単重が計量されると(S107)、該計量重量は比較手段144へ送信される。ここで、該比較手段144は各集積場所D1〜D6が有する投下2順目の中間目標重量差を記憶手段142cから抽出し、該抽出した各重量差と、前記計量された物品Pの単重との比較を行う。
該比較結果は振分制御手段145へ送信され、該振分制御手段145は、前記計量された物品Pの単重と最も近しい中間目標重量差T(n+1)−Sniを有する集積場所Dへ投下するよう、各集積場所D1〜D6に対応して設けられた振分手段15を作動させるべく信号を送る。そして該信号を受けた該振分手段15により該物品Pが所定の集積場所Dへ投下されることとなる(S108)。
【0035】
振り分けられた前記物品Pの単重は、該物品Pが投下された集積場所Dの積算重量として積算され(S109)、投下された集積場所毎の積算重量として記憶手段142aの所定の格納領域へ格納される。
【0036】
D1〜D6まで全ての集積場所への投下が確認された後(S110)、算出手段143により投下2順目の平均単重が算出され(S111)、該平均単重の3倍の値が、3順目(n+1順目)の中間目標重量T(n+1)として算出され(S112)、記憶手段142bの所定の格納領域へ格納される。
【0037】
そして、次に3順目における中間目標重量差T(n+1)−Sniが、算出手段143によって算出され、記憶手段142cの所定の格納領域へ格納される。
【0038】
以上、投下2順目に関し、更に図4に基づき具体的な数値を参照しつつ、振り分け制御の一例を挙げて説明する。
仮に、投下2順目の最初に搬入された物品Pの重量が425gであったとすると、該重量と各集積場所D1〜D6が有する投下2順目の中間目標重量差との比較が、夫々、行われ、該重量は集積場所D2が有する中間目標重量差420gと最も近しいとの比較結果に基づき、集積場所D2へ投下される。
【0039】
以下、2つ目以降の物品についても同様の処理を繰り返し、D1〜D6まで全て物品が投下されたことを確認し(S110)、投下2順目の集積処理が終了する。
【0040】
引き続き投下3順目、4順目、…投下(N−1)順目に至るまでは、前述のS107からS112までと同様の処理が行われるが、投下2順目以降、投下(N−1)順目においては、D1〜D6まで全ての集積場所Dへ物品Pが投下されたことが確認された後(S110)、次の順目が、N順目、即ち、最終の投下順目であるか否かの判断処理が行われる(S113)。以下、詳述する。
【0041】
〔最終の投下順目であるか否かの判断処理〕
次の投下順目が最終の投下順目であるか否かは、集積場所D1〜Diにおける最終目標重量差合計(以下、αと称す。)と、投下(N−1)順目までの集積場所D1〜Diにおける積算重量の順目平均(以下、βと称す。)とを比較による。即ち、前記αが前記βの±20%以内であるか否かで、次の投下順目が最終の投下順目であるか否が判断されることとなる。
【0042】
前述の通り、各投下順目において積算手段141が投下順目毎に集積場所D1〜Di毎に投下物品の積算を行う一方、算出手段143は、投下順目毎に該積算結果と最終目標重量との差を算出するとともに、集積場所D1〜Diにおける該重量差合計αを算出する。
【0043】
更に、算出手段143は、積算重量の順目当たりの平均重量βを投下順目毎に算出する。尚、前記α及び前記βは、算出後、記憶手段142aの所定の格納領域へ格納される。
【0044】
そして、各順目における、i個入ったか否かの確認処理(S110)を経て、次順の目標重量を算出した(S111、S112)後、算出手段143は、前記αが前記βの±20%以内であるか否かを判断する(S113)。
【0045】
この時、前記αが前記βの±20%以内でなければ、次の投下順目は、まだ最終投下順目でないと判断し、次順の振り分け制御は、前述の通り、中間目標重量差に近い集積場所Dへ振り分けられる。
一方、前記αが前記βの±20%以内となれば、次の投下順目が最終投下順目と判断し、後に詳述する最終投下順目特有の振り分け制御によることとなる。
【0046】
以上、最終の投下順目であるか否かの判断処理に関し、更に、具体的な数値に基づき図4を参照しながら説明する。
集積場所D1〜D6までの投下(N−1)順目までの各積算重量が図4に示す如くであった場合に、前記αは、集積場所D1〜D6までの各最終目標重量差300g、450g、400g、600g、550g、500gの合計重量2,800gとなる。
一方、前記βは、仮に図4に示す投下(N−1)順目が投下9順目であったとすれば、各集積場所の積算重量が4,700g、4,550g、4,600g、4,400g、4,450g、4,500gであることより、約3,020g(≒ 4700/9 + 4550/9 + 4600/9 + 4400/9 + 4450/9 + 4500/9)となる。
【0047】
そして該重量(3,020g)の前後20%の重量(2,416g/3,624g)を、算出手段143が算出し、該重量範囲内に前記α(2,800g)が含まれるか否か、比較手段144により比較判断されることとなる(S113)。
本実施の形態においては、2,416g<2,800g<3,624gであることから、前期αが該重量範囲内にあると判断され、次の投下順目が最終投下順目であると認識される。
【0048】
〔最終投下順目の振り分け制御〕
最終投下順目の振り分け制御について説明する。
N順目、即ち、最終投下順目の振り分け制御は、搬入された物品Pの重量が、最終目標重量Tと集積場所毎の投下(N−1)順目までの積算重量S(N−1)iとの差以上の重量であり、且つ、その差に最も近い一の集積場所Dへ該物品を振り分けるというものである。
【0049】
更に、具体的な数値に基づき、図を参照しながら説明する。
投下(N−1)順目終了時におけるD1〜D6までの集積場所毎の積算重量が、図4に示すように、D1から順に4,700g、4,550g、4,600g、4,400g、4,450g、4,500gであるとする。尚、該積算重量は積算手段141により、各集積場所D1〜D6につき投下1順目から投下順目毎に積算され、記憶手段142aの所定の格納領域に格納されている。
【0050】
この時点において、各集積場所が前記最終目標重量に不足する重量である最終目標重量差が、算出手段143により算出されている。D1は、あと300gで最終目標重量に達することを示す。D2以下、同様、順に450g、400g、600g、550g、500gが各集積場所に係る最終目標重量に不足する重量である。係る数値は、算出後、各集積場所の最終目標重量差として記憶手段142cの所定の格納領域に格納されている。
【0051】
投下N順目に際し、搬入コンベア10から物品Pが新たに搬入され、計量コンベア11に連設した計量手段13により該物品Pの単重が計量されると(S114)、該物品重量は比較手段144へ送られる。この時、該比較手段144は、記憶手段142cに記憶されている各集積場所D1〜D6の個々の最終目標重量差を抽出して集積場所毎に該物品重量との比較を行い、該比較結果及び各集積場所の最終目標重量差を振分制御手段145へ送る(図1)。
【0052】
上記比較結果を受け取った振分制御手段145は、該比較結果に基づき、該物品重量が各集積場所の有する最終目標重量差T-S(N−1)i以上であり、且つ、該重量差に最も近しい値を有する一の集積場所Dを決定し、該集積場所Dへ該物品Pを投下するよう振分手段15を作動させる(S115)。
【0053】
仮に、最終の投下順目に際し、搬入コンベア10から搬入されてきた物品Pの重量が575gであった場合、比較手段144により、最も近しいD4、D5が判断され、該比較結果及び該集積場所に係る最終目標重量差が振分制御手段145へ送信される。ここで振分制御手段145は、該物品Pの重量(575g)と、D4に係る最終目標重量差(600g)及びD5に係る最終目標重量差(550g)との比較判断の下、該物品Pの重量がD5の最終目標重量以上であることを認識する。そして、搬送コンベア12上の該物品Pを集積場所D5へ投下するよう、該集積場所D5に対応して設けられた振分手段15を作動させるべく信号を送る。振り分け後は、集積場所毎に投下物品の重量積算が行われ、最終的な集積重量を算出する(S116)。
【0054】
以下、同様の処理を繰り返し、D1〜D6まで全て物品が投下されたことを確認し(S117)、一連の集積処理が終了する。
【0055】
上記実施の形態によれば、投下物品の実重量に基づく投下順目毎の振分調整により集積場所間の均一化が図れ、且つ、最終段階における振分調整による歩留まり向上効果とが相俟って、最終的に集積場所間の重量の均一化及び出荷製品全体の品質の向上を図ることができる。
【0056】
〔上記実施の形態の変形例〕
以上、本発明の実施の形態について説明したが、この発明は上記の例に限定されるものではない。
(1)上記実施の形態においては、投下2順目以降、投下(N−1)順目までの各順目において、中間目標重量差に基づき振り分け制御を行っていたが、これに限らず、投下2順目以降、投下(N−1)順目に至るまで、物品PをD1〜Diまでの各集積場所へ順に投下する一方、前述の最終投下順目確認処理のみを行うことでN順目を判断し、上述の最終目標重量差に基づき振り分け制御を行うこととしても良い。
係る変形例によっても、歩留まりを向上させ、集積した物品総重量の均一化に加え、出荷製品の品質の向上を図ることが可能となる。
【0057】
(2)また、上記実施の形態においては、中間目標重量を平均単重に基づき算出していたが、これに限らず、予め単重を固定的に設定することとしても良い。
例えば、上記実施の形態において、物品Pの単重を500gと固定的に設定することで、投下2順目は1,000g、投下3順目は1,500g、…と投下順目の倍数を該固定した設定重量に乗じて得られる中間目標重量に基づき、振り分け制御を行うこととしても良い。
係る変形例によっても、上記実施の形態において得られる効果と同程度の効果が発揮される。
【0058】
(3)更に、上記実施の形態及び前記変形例(1)においては、次の投下順目が最終の投下順目であるか否かは、集積場所D1〜Diにおける最終目標重量差合計αと、投下(N−1)順目までの集積場所D1〜Diにおける積算重量の順目平均βとを比較した場合において、前記αが前記βの±20%以内であるか否かで判断することとしていたが、これに限らず、一の集積場所へ投下する物品の投下予定個数を、予め固定的に定めておくこととしても良い。
即ち、投下順目毎に該投下予定個数から一つずつ減じる処理を行い、若しくは、投下順目毎に投下個数を累積し、該投下予定個数と該累積個数との差を認識させることで、次順目が、最終投下順目であるか否かを判断させることとしても良い。
係る変形例によっても、上記実施の形態等において得られる効果と同程度の効果が発揮される。
【産業上の利用可能性】
【0059】
本発明の計量装置は、自然物はもとより、単重にバラツキのある種々の物品等を所定の集積場所へ集積するといった定量計量に資する発明であるといえる。
【図面の簡単な説明】
【0060】
【図1】本発明の実施の形態を示す機能ブロック図である。
【図2】本発明の実施の形態の処理手順を示すフロー図である。
【図3】本発明の実施の形態に係る計量装置の概略図である。
【図4】本発明の実施の形態を示す概念図である。
【符号の説明】
【0061】
1 本発明に係る計量装置
10 搬入コンベア
11 計量コンベア
12 搬送コンベア
13 計量手段
14 制御部
141 積算手段
142 記憶手段
143 算出手段
144 比較手段
145 振分制御手段
146 重量設定手段
15 振分手段
P 物品
D 集積場所
【特許請求の範囲】
【請求項1】
物品の重量を計量する計量手段と、
該計量手段の下流に設けられ計量済み物品を搬送する搬送手段と、
該搬送手段により搬送された物品を集積させる複数の集積場所と、
該集積場所へ物品を振り分けるために該集積場所毎に対応して設けられた振分手段と、
制御部とからなる計量装置であって、
該制御部は、
前記集積場所に複数の物品を集積させる最終目標重量を設定する重量設定手段と、
前記計量手段により計量された重量を集積場所毎に積算する積算手段と、
前記積算手段により積算された積算重量と、前記最終重量との差である最終目標重量差を集積場所毎に算出する算出手段と、
前記最終目標重量と、前記積算重量と、前記最終目標重量差を記憶する記憶手段と、
前記計量手段により計量された物品の重量と前記最終目標重量差とを比較する比較手段と、
該比較結果に基づき前記最終目標重量差以上で、且つ、前記最終目標重量差に近い集積場所へ前記計量された物品を振り分ける振分制御手段とからなることを特徴とする計量装置。
【請求項2】
請求項1に記載の計量装置であって、
前記算出手段は、前記中間目標重量と前記積算重量との差である中間目標重量差を算出し、
前記記憶手段は中間目標重量と、前記中間目標重量差を記憶し、
前記比較手段は、前記計量手段によって計量された物品の重量と前記中間目標重量差とを比較し、
前記振分制御手段は、該比較結果に基づき、前記中間目標重量差に近い集積場所へ前記計量された物品を振り分けることを特徴とする計量装置。
【請求項3】
請求項2に記載の計量装置であって、
前記中間目標重量は、計量済みの物品の重量から算出される平均単重に基づき算出されることを特徴とする計量装置。
【請求項1】
物品の重量を計量する計量手段と、
該計量手段の下流に設けられ計量済み物品を搬送する搬送手段と、
該搬送手段により搬送された物品を集積させる複数の集積場所と、
該集積場所へ物品を振り分けるために該集積場所毎に対応して設けられた振分手段と、
制御部とからなる計量装置であって、
該制御部は、
前記集積場所に複数の物品を集積させる最終目標重量を設定する重量設定手段と、
前記計量手段により計量された重量を集積場所毎に積算する積算手段と、
前記積算手段により積算された積算重量と、前記最終重量との差である最終目標重量差を集積場所毎に算出する算出手段と、
前記最終目標重量と、前記積算重量と、前記最終目標重量差を記憶する記憶手段と、
前記計量手段により計量された物品の重量と前記最終目標重量差とを比較する比較手段と、
該比較結果に基づき前記最終目標重量差以上で、且つ、前記最終目標重量差に近い集積場所へ前記計量された物品を振り分ける振分制御手段とからなることを特徴とする計量装置。
【請求項2】
請求項1に記載の計量装置であって、
前記算出手段は、前記中間目標重量と前記積算重量との差である中間目標重量差を算出し、
前記記憶手段は中間目標重量と、前記中間目標重量差を記憶し、
前記比較手段は、前記計量手段によって計量された物品の重量と前記中間目標重量差とを比較し、
前記振分制御手段は、該比較結果に基づき、前記中間目標重量差に近い集積場所へ前記計量された物品を振り分けることを特徴とする計量装置。
【請求項3】
請求項2に記載の計量装置であって、
前記中間目標重量は、計量済みの物品の重量から算出される平均単重に基づき算出されることを特徴とする計量装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−105702(P2007−105702A)
【公開日】平成19年4月26日(2007.4.26)
【国際特許分類】
【出願番号】特願2005−301926(P2005−301926)
【出願日】平成17年10月17日(2005.10.17)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成19年4月26日(2007.4.26)
【国際特許分類】
【出願日】平成17年10月17日(2005.10.17)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]