
記録媒体から読み取ったデータのアシンメトリの補正方法と補正装置
【課題】ヒストグラムを利用して、記録媒体から読み取ったデジタルデータのアシンメトリを補正する。
【解決手段】デジタルデータの各出力値の出現回数を該出力値の関数として表現して作成したヒストグラムにおいて、補正後の出力値の分布の対称の中心となるべき値をチェックポイント値として求める(S102、S103)。該チェックポイント値よりも大きいデジタルデータの各出力値の集合と、該チェックポイント値よりも小さいデジタルデータの各出力値の集合とに対して、アシンメトリによる波形歪みが相対的に小さい方の集合にある出力値を基準値として、他方の集合にある出力値を補正する(S104)。また、ヒストグラムを用いたアシンメトリ補正をビタビ復号に適用する。
【解決手段】デジタルデータの各出力値の出現回数を該出力値の関数として表現して作成したヒストグラムにおいて、補正後の出力値の分布の対称の中心となるべき値をチェックポイント値として求める(S102、S103)。該チェックポイント値よりも大きいデジタルデータの各出力値の集合と、該チェックポイント値よりも小さいデジタルデータの各出力値の集合とに対して、アシンメトリによる波形歪みが相対的に小さい方の集合にある出力値を基準値として、他方の集合にある出力値を補正する(S104)。また、ヒストグラムを用いたアシンメトリ補正をビタビ復号に適用する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気ディスクや光ディスクといった記録媒体に記録した情報を読み取って再生する際のデジタル再生信号のアシンメトリ(非対称性)の補正に関するものである。
【背景技術】
【0002】
近年、磁気ディスク装置や光ディスク装置の記録密度は一段と向上し、高密度記録が行なえるようになっている。高密度記録を行う場合には、ヘッドやディスクの品質のばらつきなどにより最適でない再生条件でデータを読み出すと、再生信号にはアシンメトリ(非対称性)が生じる。つまり、理想的な状態であれば、磁気ヘッドや光学ヘッドのレスポンスが線形の部分を常に用いてデータの読み出しができるが、ディスクやヘッドの品質のばらつきにより、ヘッドのレスポンスが非線形の範囲でデータを読み出さなければならないことが起こる。つまり、磁気ヘッドや光学ヘッドからの出力は、出力信号の大きさを上下方向としてみたときに、上下非対称となる。このアシンメトリをより強力に補正することができれば、ヘッドやディスクの製造の際の歩留まりも高まり、また、ディスク装置の信頼性も向上する。
【0003】
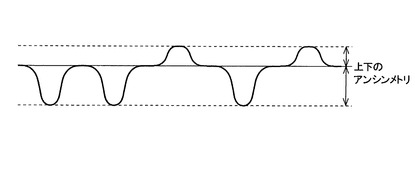
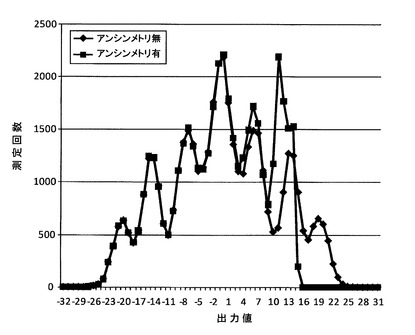
図14はこのようなアシンメトリを模式的に表したものである。出力信号の大きさを縦軸として時間の関数として出力信号をプロットしたものである。本来、上下対称であるべきヘッドの出力の上側がヘッドのレスポンスの非線形性により詰まっており、上下に非対称になっている。図15は、実際の出力データでこの非対称歪みがある場合とない場合を測定した結果得られた出力値(振幅値)(x軸)の出現回数をy軸にとったヒストグラムを示す。
【0004】
アシンメトリの補正方法は複数知られている。例えば、特許文献1には、AD変換後の信号に対してブランチメトリック演算を行ってからビタビ復号器に信号を入力する方法が開示されている。特許文献2には、アナログ出力信号に対してアシンメトリ検出器を用いてサンプリングを行いAD変換後に用いる補正係数を算出する手法が開示されている。特許文献3には、波形等化器(FIRフィルタ)の等化係数(タップ)を適応制御する際の精度を、アシンメトリ検出器を用いて向上させる手法が開示されている。特許文献4には、オフセット補正器が検出したアシンメトリ量を用いて非線形変換によりアシンメトリ補正を行ってビタビ復号を行う手法が記載されている。これらの手法によっても相応の補正は可能であるが、より強力な補正が可能であれば、記録密度が高まるにつれてより厳しくなっているディスクやヘッドの製造歩留まりを一段と向上させることができる。
【0005】
このような従来技術の課題に鑑み、本発明は、新たなアシンメトリの補正方法および補正装置を提供するものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001-186027号公報
【特許文献2】特開2008−276882号公報
【特許文献3】特開2003−85764号公報
【特許文献4】特開2007−59018号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、記録媒体から読み取られたデジタルデータに対してより精度の高いアシンメトリ補正を実現することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、デジタルデータの値と各値の出現回数をヒストグラムに表して、そのヒストグラムに基づいてデジタルデータのアシンメトリ補正を行う。
【0009】
本発明は、まず、デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出ステップと、前記ヒストグラムにおいて、アシンメトリ補正後に出力値の対称の中心となるべき値をチェックポイント値として求めるチェックポイント決定ステップと、該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、両集合における出力値の分布がチェックポイント値を中心としてより対称に近づくように、一方の集合にある出力値を基準値として、それに他方の集合の出力値を対応付けることにより補正するアシンメトリ補正ステップとを含んでなる記録媒体から読み取ったデータのアシンメトリ補正方法を提供する。なお、ここで、「対称の中心」とは絶対的な意味ではなく、アシンメトリ補正後の出力値の分布がある程度の対称性を取り戻したものとなっており、その分布の中でおおむね中央にあるという意味である。
【0010】
また、本発明は、記録媒体から読み取った信号にA/D変換を実行し、次いで逆フィルタによる処理を行うデジタルデータの前処理ステップと、該デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出ステップと、前記ヒストグラムにおいてある値以上の各出力値の出現回数の和と、その値未満の各出力値の出現回数の和とが同一またはほぼ同一になる値をチェックポイント値として求めるチェックポイント決定ステップと、アシンメトリによる波形歪みが出力値の大きい方に強く発現しているのか、小さい方に強く発現しているのかを判断するアシンメトリ方向性決定ステップと、チェックポイント値とアシンメトリ方向性とに基づいてオフセット量を決定するオフセット量決定ステップと、該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、アシンメトリ方向性決定ステップでアシンメトリによる波形歪みが小さいと決定された方の集合にある出力値を基準値として、それにもう一方の集合の出力値を対応付けるルックアップテーブルを生成するルックアップテーブル生成ステップと、前記オフセット量と前記ルックアップテーブルとに基づいて、デジタルデータを補正するアシンメトリ補正ステップと、補正されたデジタルデータをデジタル等化器へと出力する出力ステップとを含んでなる記録媒体から読み取ったデータのアシンメトリ補正方法を提供する。
【0011】
さらに、本発明は、記録媒体からの読み取りアナログ信号をA/D変換した後にデジタル等化器による処理を行う前処理ステップと、デジタル等化器からの出力値をビタビ復号器の状態と関連づけながら、ビタビ復号器のデータパターンごとに各出力値の出現回数をヒストグラムとして表現するヒストグラム算出ステップと、ヒストグラムに基づいてブランチメトリックをルックアップテーブルとして計算するブランチメトリック算出ステップと、該ルックアップテーブルに基づいて、ビタビ復号を行うステップとを含んでなるデジタルデータのアシンメトリ補正方法を提供する。
【0012】
そして、本発明は、デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出手段と、前記ヒストグラムにおいて、アシンメトリ補正後に出力値の分布の対称の中心となるべき値をチェックポイント値として求めるチェックポイント決定手段と、該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、両集合における出力値の分布がチェックポイント値を中心としてより対称に近づくように、一方の集合にある出力値を基準値として、それに他方の集合の出力値を対応づけることにより補正するアシンメトリ補正して、出力するアシンメトリ補正手段とを備える記録媒体から読み取ったデジタルデータのアシンメトリ補正装置を提供する。
【0013】
さらに、本発明は、記録媒体から読み取った信号に対してA/D変換と逆フィルタによる処理を施して得られるデジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出手段と、前記ヒストグラムにおいて、ある値以上の各出力値の出現回数の和と、その値未満の各出力値の出現回数の和とが同一またはほぼ同一になる値をチェックポイント値として求め、該チェックポイント値からアシンメトリによる波形歪みが出力値の大きい方に強く発現しているのか、小さい方に強く発現しているのかを判断してアシンメトリの方向性を決定し、このアシンメトリの方向性と前記チェックポイント値とに基づいてオフセット量を決定するオフセット量決定手段と、該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、アシンメトリによる波形歪みが小さいと決定された方の集合にある出力値を基準値として、それにもう一方の集合の出力値を対応付けるルックアップテーブルを生成するルックアップテーブル生成手段と、オフセット量に基づいてオフセット補正を行うオフセット補正手段と、前記ルックアップテーブルに基づいてアシンメトリ補正を行ってデジタル等化器へと出力する補正処理手段とを備える記録媒体から読み取ったデータのアシンメトリ補正装置を提供する。
【0014】
そして、本発明は、記録媒体からの読み取りアナログ信号をA/D変換した後にデジタル等化器による処理を行って得るデジタル等化器からの出力値を、ビタビ復号器の状態と関連づけながら、ビタビ復号器のデータパターンごとに各出力値の出現回数をヒストグラムとして表現するヒストグラム算出部と、ヒストグラムに基づいてブランチメトリックをルックアップテーブルとして計算するブランチメトリック算出部と、該ルックアップテーブルに基づいて、ビタビ復号を行うビタビ復号器とを含んでなるデジタルデータのアシンメトリ補正装置を提供する。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施態様にかかる方法を説明するフローチャートである。
【図2】本発明の第2の実施態様にかかるアシンメトリ補正装置の概要を示すブロックダイアグラムである。
【図3】パラメータ算出ユニットの動作を示すフローチャートである。
【図4】ヒストグラムが生成された時点でのパラメータAとBの算出スタート時のヒストグラムを示す。
【図5】パラメータAの算出プロセスを示すフローチャートである。
【図6】パラメータAの算出後のチェックポイントの位置を示すヒストグラムである。
【図7】パラメータBの算出プロセスを示すフローチャートである。
【図8】パラメータB算出後のヒストグラムの各項の並び替えと呼び名の変更を示すフローチャートである。
【図9】アシンメトリによる波形歪みのある側の出力値とアシンメトリによる波形歪みがない側の出力値の対応付けを示すダイアグラムである。
【図10】ルックアップテーブルの生成プロセスを示すフローチャートである。
【図11】本発明の第3の実施態様にかかるアシンメトリ補正装置を示すブロックダイアグラムである。
【図12】各データパターンについて算出されたデジタル出力値とその出現回数のヒストグラムである。
【図13】データパターンごとのヒストグラムから出力値とその発現確率を求める過程を示すフローチャートである。
【図14】非線形性のアシンメトリによる波形歪みを模式的に示すグラフである。
【図15】アシンメトリによる波形歪みを有する場合とそれがない場合での各出力値の出現回数を示すヒストグラムをグラフに示したものである。
【発明を実施するための形態】
【0016】
(第1の実施態様)
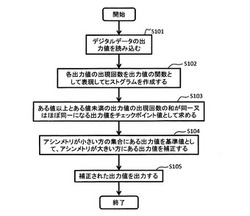
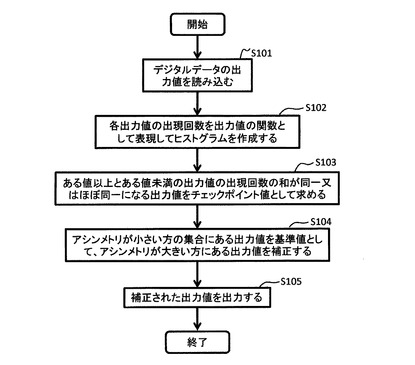
図1に、本発明の第1の実施形態のフローチャートを示す。まず、記録媒体から読み取ったデジタルデータ(S101)の各出力値の出現回数を出力値の関数として表現してヒストグラムHを作成する(S102)。ヒストグラムHは、図4に示すようなものである。このヒストグラムHは、デジタルデータの出力値の出現回数を数えて、例えば、各出力値についてその値の出現回数を出力値の小さい方から大きな方へ(負の出力値から正の出力値へと)下から上へと並べることによって生成することができる。そして、出力値のうちのある値以上の出力値と、その値未満の出力値とについて、それぞれ出現回数の和を取り、その和が同一またはほぼ同一になる(和の差がゼロまたは最小になる)出力値をチェックポイント値として求める(S103)。代替的には、出力値の最大のものと最小のものを求めて、その平均をとって、チェックポイント値とすることも可能である。このステップS102とS103とが、チェックポイント決定ステップを構成する。そして、このチェックポイント値以上の各出力値の集合と、チェックポイント値未満の各出力値の集合とに対して、アシンメトリによる波形歪みが小さい方の集合にある出力値を基準値として、アシンメトリによる波形歪みが大きい方の集合にある出力値を補正する(S104)(アシンメトリ補正ステップ)。これは、例えば、ヒストグラムHの中で、チェックポイント値を境目として、アシンメトリによる波形の歪みが少ないか、ない側が理想的な出力状態を表しているものと見なして基準値とし、ヒストグラムのチェックポイント値を挟んだ反対側の出力値を基準値に対応づけることをする。その対応関係をルックアップテーブルCとして、アシンメトリによる波形歪みが比較的大きい側の出力値を基準値と対応づけて、補正された出力値に変換する。なお、この対応関係は、ルックアップテーブルを用いる方法以外にも、ある関数に基づいて四則演算して見出すなど、種々の方法がある。そして、補正された出力値を出力する(S105)。
【0017】
上述のような本発明の一実施形態によれば、多くのハードウェアリソースを必要とすることなく、より強力なアシンメトリの補正が可能となる。なお、記録装置によっては、どちらの方向(例えば、ゼロを起点として正の側または負の側)にアシンメトリによる波形歪みが強く出るか一定の傾向があるものもある。アシンメトリによる波形歪みが強く出る側を測定しなくても明らかな場合があるので、本実施態様においてはアシンメトリがチェックポイント値のどちら側で大きいかを計測するステップをあえて含まない。
【0018】
(第2の実施形態)
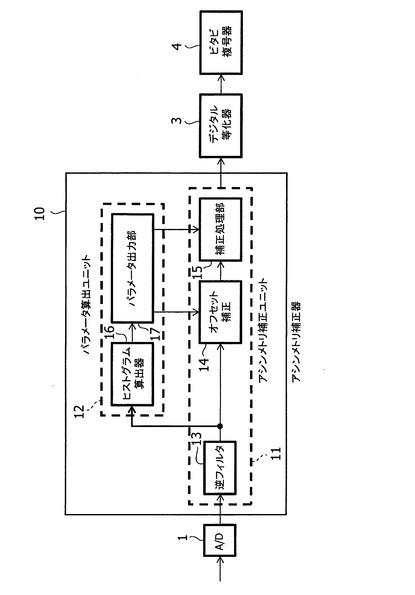
以下に、本発明の第2の実施態様を説明する。図2に、本発明の一つの実施態様によるアシンメトリ補正装置を含む記録媒体からのデータ再生装置のブロック図を示す。磁気ヘッドや光学ピックアップにより記録媒体から読み出された信号は、フロントエンドプロセッサ(図示せず)により処理されたあと、アナログ/デジタル変換器1に入力される。その後、例えば6ビット程度のビット数を有するデジタル出力は、アシンメトリ補正装置10に入力される。アシンメトリ補正装置10は、アシンメトリ補正ユニット11とパラメータ算出ユニット12とからなり、アシンメトリ補正ユニット11は、逆フィルタ13とオフセット補正部14,補正テーブルに基づいてアシンメトリの補正を行う補正処理部15を備えており、パラメータ算出ユニット12は、ヒストグラム算出器16 とパラメータ出力部17 とを備えている。ヒストグラム算出器16は、逆フィルタ13から出力されたデジタル信号の各値と各値の出現回数をヒストグラムとして表す。パラメータ出力部17は 、このヒストグラムに基づいて、アシンメトリの方向性とオフセット補正の補正量を決定する。パラメータ算出ユニット12は 、ヒストグラムと、アシンメトリ方向性と、オフセット補正量とに基づいて、アシンメトリ補正用のルックアップテーブルを生成する。オフセット補正量は、オフセット補正器14に入力されて、オフセット補正が行われる。また、ルックアップテーブルはアシンメトリ補正ユニット11にある補正処理部15に入力され、さらなる補正処理が行われる。補正処理部15から出力された信号は、デジタル等化器3とビタビ復号器4により処理されて2値化データとして出力される。
【0019】
ここで、逆フィルタ13としては、FIRフィルタを用いることができる。このFIRフィルタは、例えば、5タップ程度のFIRフィルタでよい。タップ係数は、経験的に得られる定数である5つの係数D0,D1,D2,D3,D4である。 この5タップの場合、逆フィルタ13の入力in(k)と出力X(k)の関係は次のようになる。
X(k)=Σ4m=0{Dm・in(k-m)}
【0020】
オフセット補正部14によるオフセット調整は、次の式により与えられる。
Y(k)=X(k)-B
ここで、Bは、パラメータ算出ユニット12、より具体的には、パラメータ出力部17 から得られるパラメータBの値であり、Y(k)が出力となる。
【0021】
補正処理部15は、パラメータ算出ユニット12、より具体的にはパラメータ出力部17 から得られるルックアップテーブルを含んでいて、そのルックアップテーブルに基づいてアシンメトリの補正を行う。
【0022】
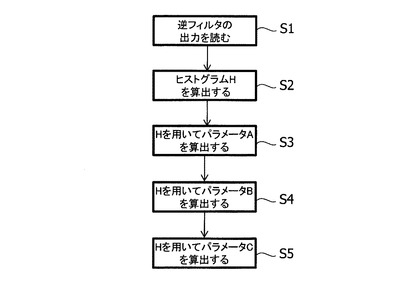
次に、パラメータ算出ユニット12の動作を説明する。パラメータ算出ユニット12においては、図3のフローチャートに示すように、まず、ヒストグラム算出器16が逆フィルタ13の出力を得て(S1)、ヒストグラムHを生成する(S2)。つぎに、パラメータ出力部17 が、このヒストグラムに基づいてアシンメトリの極性を示すパラメータAを計算し(S3)、さらに、ヒストグラムHに基づいて、オフセット調整のためのパラメータBを計算する(S4)。このパラメータBはオフセット補正器14に入力されて、オフセット補正処理に用いられる。その後、パラメータ出力部17 が補正処理部15で用いるルックアップテーブルC(パラメータC)を生成する(S5)。
【0023】
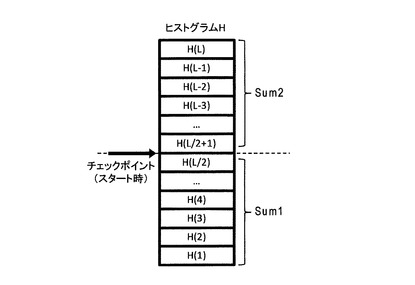
まず、ヒストグラム算出器16 により、長さLのヒストグラムHを生成する。Lの値は、一般に、逆フィルタ13の出力値の範囲を示す。例えば、6ビットの出力であればLは64となるが、出力がない部分を省略して、Lの値として64より小さい値を採用することもできる。もちろん逆フィルタ13の出力は6ビットに限定されるものではない。このヒストグラムHは、逆フィルタ13のそれぞれの出力値の出現回数を数えて、各出力値についてその値の出現回数を出力値の小さい方から大きな方へと(負の出力値から正の出力値へと)下から上へL個並べることによって生成することができる。図4に示すように、逆フィルタ13からの各出力値の出現回数を表にする。このときの各出力値の出現回数を出力値の小さい方(6ビット出力の場合は−32)からH(1)で始めて、最大の出力値(6ビット出力の場合は31)の出現回数をH(L)とする。ここで、ヒストグラム中にあるチェックポイントの下にある出現回数の合計をSum1とし、チェックポイントの上にある出現回数の合計をSum2とする。このチェックポイントは、スタート時にはヒストグラムの中央にあって、Sum1とSum2が求められる。
【0024】
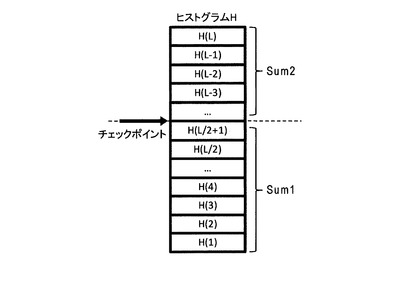
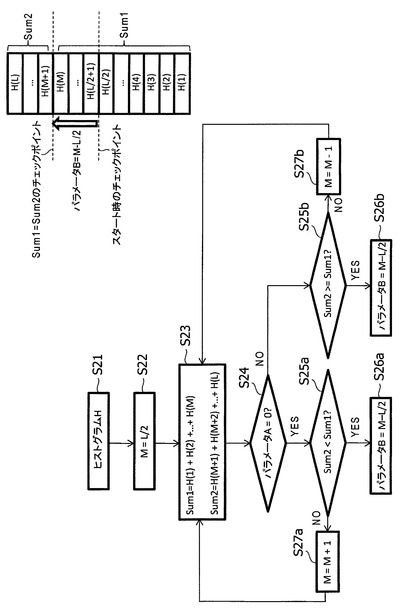
一般に、Sum1とSum2の値は異なるが、これらの値に基づいてアシンメトリの極性または方向性を表すパラメータAを求めることができる。図5に示すように、まず、ヒストグラムHに基づいてSum1とSum2を計算する(S12)。このときチェックポイント(スタート時のチェックポイント)は、上述のように、L/2+1とL/2の間にある(この状態をチェックポイントがL/2にあるという)。スタート時のSum1がSum2よりも大きければ、パラメータA(PA)を1とし、さもなければパラメータA(PA)を0とする(S13、S14,S15)。パラメータAが1であれば、負の方向の信号振幅が小さく(通常、負の出力値の方で非線形性が強く表れた状態)、パラメータAがゼロであれば、正の方向の信号振幅が小さいこと(通常、正の出力値の方で非線形性が強く表れた状態)を示す。さらに、図6に示すように、このチェックポイントを上下に移動させることにより、Sum1とSum2の値が同一となるようにすることができる。スタート時のチェックポイントの位置とSum1とSum2が等しくなるかその差が最小になるチェックポイントの位置との距離に基づいて、オフセット調整のためのパラメータBを算出することができる。このパラメータBの計算は、図6に示すようにして行うことができる。つまり、要素数がLである所与のヒストグラムH(S21)に対して、チェックポイントの位置MをL/2にまず設定して(S22)、Sum1とSum2を求める(S23)。先に求めたパラメータAの値がゼロであれば(S24)、このSum1がSum2より大きいかを判断して(S25a)、もしそうであれば、パラメータBの値を現在のMの値からL/2引いたものとし(S26a)、もしそうでなければ、チェックポイントの位置Mを1だけ増やして(S27a)、Sum1とSum2の計算を再度行う(S23)。パラメータAがゼロでない、つまり1であれば(S24)、Sum2がSum1以上であるかを判断して(S25b)、もしそうであれば、パラメータBの値をその時点でのMの値からL/2引いたものとする(S26b)。さもなければ、Mの値を1だけ減らして(S27b)、Sum1とSum2の計算(S23)に戻る。その結果、パラメータBが決まり、チェックポイントの位置は、L/2からMへと移動することになる。
【0025】
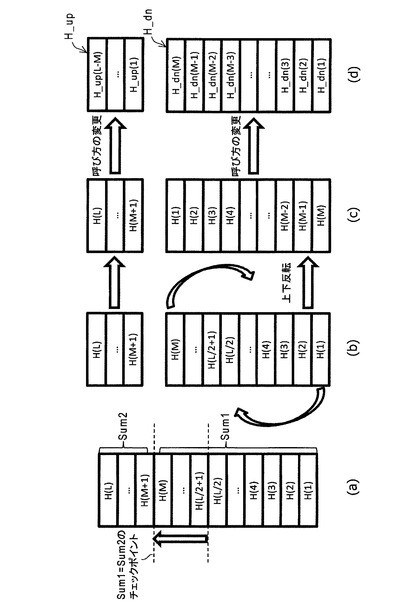
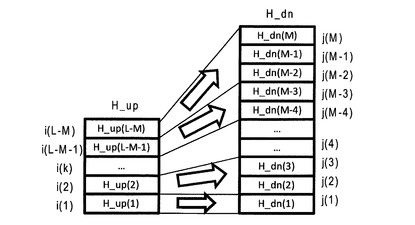
このようにして、Sum1とSum2が等しくなるかほぼ等しくなるチェックポイントが見つかり、パラメータBの値が定まった段階で、先に求めてあるヒストグラムを再構成する。つまり、図8に示すように、ヒストグラムのチェックポイントより上の部分であるH(M+1)〜H(L)の値はそのままにしておいた上で、それぞれの呼び方をH_up(L−M)〜H_up(1)と変更する(図8の(c)から(d))。これは、各エントリの呼び方を変えるだけで、数値のならびはもとと同じである。チェックポイントより下の部分であるH(M)〜H(1)については、この下の部分において一番上にあるH(M)の値がヒストグラムの一番下になるように、一番下にあるH(1)の値が下の部分で一番上になるように、ヒストグラムの上下を反転する(図8の(b)から(c))。すると上から下へH(1)からH(M)と並ぶことになる。ここで、各エントリの名前を変更する。つまりH(1)をH_dn(M)とし、下に向かって順次、H_dn(M−1)、H_dn(M−2)としていき、H(M)をH_dn(1)とする(図8の(c)から(d))。ここで、upとdnは、アシンメトリの極性、つまりパラメータAの値により定まる。すなわち、アシンメトリによる波形歪みが強い側をH_upとするのである。H_dnは、アシンメトリによる波形歪みがないか少ない方であり、理想的な出力値が得られていると近似的に見なすことができる。スタート時にSum1のほうが大きく、パラメータAが1であれば、負の出力値の方向にアシンメトリによる波形歪みが見られることになり、H_upはアシンメトリが見られる図示したヒストグラムの上部となり、H_dnは下部となる。そしてパラメータAがゼロであれば、逆になる。
【0026】
つぎに、図9のように、非線形性の歪みが少ないか、ない側のヒストグラムH_dnが理想的な出力状態を表しているものと見なして基準値とし、歪みが大きい側のヒストグラムH_upをH_dnに対応づけることをする。つまりヒストグラムH_upのそれぞれの項H_up(k)(k=1,・・・,L−M)、出力値i(k)に対応しているわけであるが、この歪みが大きい側の出力値を、歪みが小さい側のヒストグラムH_dnの項の出力値j(m)(m=1,・・・,M)に関連づけて、その結果をルックアップテーブルCとする。
【0027】
このルックアップテーブルCの作成は、次のようにして行うことができる。波形歪みのある側のデータは、正常なあるいは理想的なデータからアシンメトリにより「圧縮」されていると考えることができるので、どの出力値から現在測定された値に圧縮されているのかの対応関係を計算する。この計算は、例えば、H_up(L−M)=H_dn(M)+H_dn(M−1)+H_dn(M−2)であれば、H_up(L−M)の出力値i(L−M)は、H_dn(M),H_dn(M−1),H_dn(M−2)の項に対応する出力値j(M)とj(M−1)とj(M−2)から圧縮されたと判断し、出力値i(L−M)の補正後の値は、j(M)とj(M−1)とj(M−2)の平均値であると定めることができる。なお、対応関係付けは、対応関係さえ一義に見つけ出せればいいので、上述の計算方法に限らず、種々の計算方法を考えることができる。
【0028】
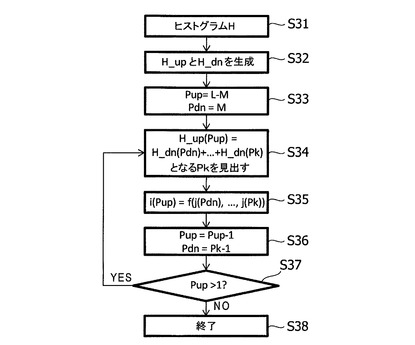
すなわち、このようなルックアップテーブルCの決定は、一例として、図10のフローチャートに示すように実行することができる。上述のように、ヒストグラムHとそれを変形して得た二つのヒストグラムH_upとH_dnを求める(S31,S32)。そして、変数PupとPdnをPup=L−MとPdn=Mと設定する(S33)。そして、変数Pkの値(正の整数値をとる)を変えながら、H_up(Pup)=H_dn(Pdn)+…+H_dn(Pk)になるPkを求める(S34)。Pkが求まると、H_dn(Pdn),…,H_dn(Pk)の項に対応する出力値j(Pdn),…,j(Pk)のある関数として修正された出力値i’(Pup)を表す。つまり、i’(Pup)=f(j(Pdn),…,j(Pk))となる。ここで、fは任意の関数であり、特に限定されるものではないが、典型的には、各変数となる対応する理想的状態の出力値の平均値となろう。ここで、Pup=Pup−1とPdn=Pk−1として、S34にもどる。これがPup=1になるまで繰り返される(S37)。
【0029】
このようにしてオフセット補正値であるパラメータBとルックアップテーブルCが求められた結果、図2に示すように、逆フィルタ13からの出力に対して、パラメータAとパラメータBによる数2のオフセット補正(オフセット補正部14)と補正テープルによる実際の出力値と推定される理想的と考えられる基準値との関連づけ(補正処理部15)を行って、アシンメトリ補正ユニット11の出力、ひいては、アシンメトリ補正装置10の出力として、デジタル等化器3へ入力することができる。なお、このようなルックアップテーブルは、ディスドライブの製造時に作成して置き、それを使用し続けることもできるし、ある一定の時間的間隔で、更新するようにして、更新されたものを使用するようにすることもできる。
【0030】
本実施形態によれば、オフセットとアシンメトリの両方について精度が高い補正を行うことができる。
【0031】
(第3の実施態様)
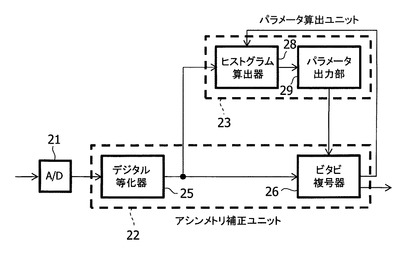
次に、本発明のヒストグラムを用いたアシンメトリ補正技術をビタビ復号器に組み込む例を第3の実施態様として説明する。この実施態様の装置は、図11に示すように、記録媒体からのデータ読み取り装置(図示せず)からの出力を受けるA/D変換器21と、デジタル等化器25とビタビ復号器26とを備えるアシンメトリ補正ユニット22と、デジタル等化器25からの出力とビタビ復号器26からの出力を受けてヒストグラムを計算するヒストグラム算出部28とそのヒストグラム算出部28の出力に基づいてパラメータDを計算するパラメータ出力部29とを含むパラメータ算出ユニット23とを備えるものである。すなわち、本実施態様では、デジタル等化器25からの出力値についてビタビ復号器26のデータパターンごとにヒストグラムを作成し、ビタビ復号器の入力値の各パターンの発生確率を計算する。そして、ビタビ復号器26の入力値の出現確率をパラメータDとしてビタビのブランチメトリックの計算を行うものである。
【0032】
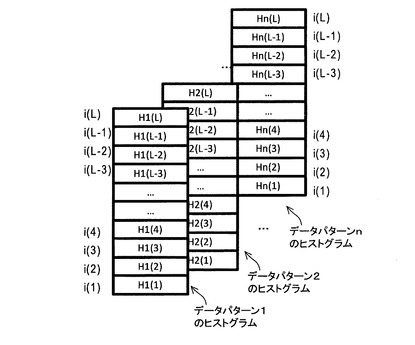
まず、ビタビ復号器26には、2d個の状態があるものとする。ここで、dは1以上の整数である。そのときこのビタビ復号器26に関連するデータパターンの長さはd+1となる。例えば、d=1であれば、2状態のビタビ復号器ということになり、データパターンの長さは2となる。具体的なデータパターンは、[00],[01],[10],[11]であって、一般的には、その数nはn=2(d+1)となる。図12に示すように、データパターンのそれぞれについて、ヒストグラムを作成する。次いで、このヒストグラムを用いてパラメータDを計算することになるが、このパラメータDは、ある入力値に対する各データパターンの発生確率を示すものである。
【0033】
ヒストグラムの生成は、次の前提に基ついて行う。ビタビの復号結果をVとし、ある時点kにおいて、ビタビ復号器の復号結果をV(k), V(k-1), … V(k-m)とする(ここで、V(k), V(k-1)…は既に分かった状態にある)。そして、時点kの入力値I(k)も分かった状態である。I(k)の大きさは、i(1), i(2)…i(L)の内、どれかである。d = 1(2状態のビタビ)の場合、データパターンは2ビットである。その際、V(k)とV(k-1)を用いて、データパターンを表す。例えば、V(k-1) =1、V(k) =0の場合、データバターンは[10]を示す。そうすることによって、ある時間が経つと、それぞれのデータパターンについて、入力値Iに対するヒストグラムが生成される。
【0034】
時点kでは、ある一つのデータパターンに関する計算しかできないが、ある時間が経つと、各データパターンにおいて、それぞれの入力値に対するヒストグラムを計算していくことが出来る。このヒストグラムを用いて、それぞれのデータパターンにおいて、入力値Iの内、大きさi(1)から、大きさi(L)の出現確率を算出する。そして、ビタビ復号器内、各可能なデータパターンで、予め算出した確率を比較することにより、最適なデータパターンを選ぶことによって復号を行う。
【0035】
図12に示すように、各ヒストグラムは、デジタル等化器25からの各出力値i(m)(mは、1からLの整数)の出現回数H(m)を表すものである。これを、上述のようなd=1の場合には、4つのデータパターンについて作成するので、ヒストグラムH1,H2,H3,H4が作成される。
【0036】
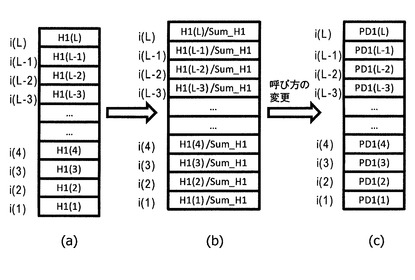
このようにして作成されたデータパターンごとのヒストグラムH1,H2,H3,H4に基づいて、図13のようにして各データパターンの発生確率を表すパラメータD1,D2,D3,D4を計算することができる。まず、ヒストグラムH1を例にとってみる。上述のように、デジタル等化器25からの各出力値i(m)の出現回数をH1(m)として、すべての出力値についてこれを求めてヒストグラムH1(H1(1)〜H1(L))がデータパターン1について作成される(図13(a))。そして、H1(m)の各要素の和をSumH1とする。SumH1=(H1(1)+H1(2)+…+H1(L)となる。そして、ヒストグラムの各項の値をSumH1で割って、新たな要素とする(図13(b))。そして、各項の値H1(m)/SumH1は全く同じままでその名前をパラメータPD1(m)とする。つまり、パラメータPD1(m)は、データパターン1におけるデジタル等化器25からの出力値i(m)の出現確率を表すことになる(図13(c))。
【0037】
本実施例のビタビ復号方法は、従来のビタビ復号方法と比べてブランチメトリックの算出方法が異なり、アシンメトリの補正機能をパラメータDを利用して実現する。まず、k時点における、状態S(i)からS(j)への遷移を考える。S(i)は、xk−dxk−d+1…xk−1とし、S(j)は、xk−d+1xk−d+2…xkとする。すると、従来のビタビのブランチメトリックBM(rk;xk−dxk−d+1…xk)は、
BM(rk;xk−dxk−d+1…xk)
={rk−m(xk−d,xk−d+1,…,xk)}2
となる。ここで、rkは時点kでの入力値であり、mは、パーシャルリスポンス(PR)方式におけるパターン(xk−d,xk−d+1,…,xk)の理想値である。dは、段落番号0031で出てきたdに他ならない。基本的に、BMの関数は、各時点、入力値rkは、パターン(xk−d,xk−d+1,…,xk)に関する条件付き確率密度の自然対数である。その時のノイズがガウス分布である場合あるいはそのように仮定できる場合には、条件付き確率密度の対数を(rk−m(xk−d,xk−d+1,…,xk))2で表す。ここで、対数をとるのは、次のような理由による。まず、ビタビ復号器は最大尤度検出器(maximum Likelihood detector)である。その動作は、次の確率の積が最大になるような復号を探すことによってなされる。すると、上式から分かるように、各時点の確率の積を取って計算する必要があるが、対数を用いれば、この乗算を加算にすることで、簡単化できるのである。
【0038】
ここで、この従来のビタビの検出方法によれば、m(xk−p,xk−p+1,…,xk)は、パターン(xk−pxk−p+1…xk)とパーシャルレスポンス目標値によって計算されるので、非線形性の影響を打ち消すようにはできない。その結果、現実の値rと理想値mの差を表すブランチメトリック値は正確に計算できず、ビタビ検出の性能は低下する。そこで、本実施例では、パラメータDを利用してブランチメトリックを次のように計算することにより、アシンメトリの補正機能を加える。
BM(rk;xk−pxk−p+1…xk)
=−log(D(rk|xk−pxk−p+1…xk))
とする。ここで、D(rk|xk−pxk−p+1…xk)は、入力値rkに対応したパラメータDの値であり、時点kの入力値rkのパターン(xk−pxk−p+1…xk)の条件付き確率であるととらえることができる。これは、図12に関連して上述のようにして得られたパラメータDの値をルックアップテーブルの形にして記憶装置に保存しておくことで、利用することができるものである。このルックアップテーブルは、記録媒体のドライブを製造する際に設定してそれを継続して使用することもできるし、ある間隔あるいはあるタイミングで更新していくようにすることもできる。ブランチメトリックの計算は統計情報Dを用いて行う。パラメータDはアシンメトリの非線形性を自然に含むものなので、より正確なブランチメトリックの計算、そして比較ができると考えられる。ここで、d= 4の場合、データパターンの長さは5となり、バターン数は25=32個。ルックアップテーブルの数は32個。各テーブルの大きさは、rkの範囲で決まる。rkの可能な値が16個であれば、各テーブルの大きさは16である。よって、ルックアップテーブル全体のサイズは32×16となる。
【符号の説明】
【0039】
1 A/D変換器
3 デジタル等化器
4 ビタビ復号器
10 アシンメトリ補正装置
11 アシンメトリ補正ユニット
12 パラメータ算出ユニット
13 逆フィルタ
14 オフセット補正部
15 補正処理部
16 ヒストグラム算出器
17 パラメータ出力部
【技術分野】
【0001】
本発明は、磁気ディスクや光ディスクといった記録媒体に記録した情報を読み取って再生する際のデジタル再生信号のアシンメトリ(非対称性)の補正に関するものである。
【背景技術】
【0002】
近年、磁気ディスク装置や光ディスク装置の記録密度は一段と向上し、高密度記録が行なえるようになっている。高密度記録を行う場合には、ヘッドやディスクの品質のばらつきなどにより最適でない再生条件でデータを読み出すと、再生信号にはアシンメトリ(非対称性)が生じる。つまり、理想的な状態であれば、磁気ヘッドや光学ヘッドのレスポンスが線形の部分を常に用いてデータの読み出しができるが、ディスクやヘッドの品質のばらつきにより、ヘッドのレスポンスが非線形の範囲でデータを読み出さなければならないことが起こる。つまり、磁気ヘッドや光学ヘッドからの出力は、出力信号の大きさを上下方向としてみたときに、上下非対称となる。このアシンメトリをより強力に補正することができれば、ヘッドやディスクの製造の際の歩留まりも高まり、また、ディスク装置の信頼性も向上する。
【0003】
図14はこのようなアシンメトリを模式的に表したものである。出力信号の大きさを縦軸として時間の関数として出力信号をプロットしたものである。本来、上下対称であるべきヘッドの出力の上側がヘッドのレスポンスの非線形性により詰まっており、上下に非対称になっている。図15は、実際の出力データでこの非対称歪みがある場合とない場合を測定した結果得られた出力値(振幅値)(x軸)の出現回数をy軸にとったヒストグラムを示す。
【0004】
アシンメトリの補正方法は複数知られている。例えば、特許文献1には、AD変換後の信号に対してブランチメトリック演算を行ってからビタビ復号器に信号を入力する方法が開示されている。特許文献2には、アナログ出力信号に対してアシンメトリ検出器を用いてサンプリングを行いAD変換後に用いる補正係数を算出する手法が開示されている。特許文献3には、波形等化器(FIRフィルタ)の等化係数(タップ)を適応制御する際の精度を、アシンメトリ検出器を用いて向上させる手法が開示されている。特許文献4には、オフセット補正器が検出したアシンメトリ量を用いて非線形変換によりアシンメトリ補正を行ってビタビ復号を行う手法が記載されている。これらの手法によっても相応の補正は可能であるが、より強力な補正が可能であれば、記録密度が高まるにつれてより厳しくなっているディスクやヘッドの製造歩留まりを一段と向上させることができる。
【0005】
このような従来技術の課題に鑑み、本発明は、新たなアシンメトリの補正方法および補正装置を提供するものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001-186027号公報
【特許文献2】特開2008−276882号公報
【特許文献3】特開2003−85764号公報
【特許文献4】特開2007−59018号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、記録媒体から読み取られたデジタルデータに対してより精度の高いアシンメトリ補正を実現することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、デジタルデータの値と各値の出現回数をヒストグラムに表して、そのヒストグラムに基づいてデジタルデータのアシンメトリ補正を行う。
【0009】
本発明は、まず、デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出ステップと、前記ヒストグラムにおいて、アシンメトリ補正後に出力値の対称の中心となるべき値をチェックポイント値として求めるチェックポイント決定ステップと、該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、両集合における出力値の分布がチェックポイント値を中心としてより対称に近づくように、一方の集合にある出力値を基準値として、それに他方の集合の出力値を対応付けることにより補正するアシンメトリ補正ステップとを含んでなる記録媒体から読み取ったデータのアシンメトリ補正方法を提供する。なお、ここで、「対称の中心」とは絶対的な意味ではなく、アシンメトリ補正後の出力値の分布がある程度の対称性を取り戻したものとなっており、その分布の中でおおむね中央にあるという意味である。
【0010】
また、本発明は、記録媒体から読み取った信号にA/D変換を実行し、次いで逆フィルタによる処理を行うデジタルデータの前処理ステップと、該デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出ステップと、前記ヒストグラムにおいてある値以上の各出力値の出現回数の和と、その値未満の各出力値の出現回数の和とが同一またはほぼ同一になる値をチェックポイント値として求めるチェックポイント決定ステップと、アシンメトリによる波形歪みが出力値の大きい方に強く発現しているのか、小さい方に強く発現しているのかを判断するアシンメトリ方向性決定ステップと、チェックポイント値とアシンメトリ方向性とに基づいてオフセット量を決定するオフセット量決定ステップと、該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、アシンメトリ方向性決定ステップでアシンメトリによる波形歪みが小さいと決定された方の集合にある出力値を基準値として、それにもう一方の集合の出力値を対応付けるルックアップテーブルを生成するルックアップテーブル生成ステップと、前記オフセット量と前記ルックアップテーブルとに基づいて、デジタルデータを補正するアシンメトリ補正ステップと、補正されたデジタルデータをデジタル等化器へと出力する出力ステップとを含んでなる記録媒体から読み取ったデータのアシンメトリ補正方法を提供する。
【0011】
さらに、本発明は、記録媒体からの読み取りアナログ信号をA/D変換した後にデジタル等化器による処理を行う前処理ステップと、デジタル等化器からの出力値をビタビ復号器の状態と関連づけながら、ビタビ復号器のデータパターンごとに各出力値の出現回数をヒストグラムとして表現するヒストグラム算出ステップと、ヒストグラムに基づいてブランチメトリックをルックアップテーブルとして計算するブランチメトリック算出ステップと、該ルックアップテーブルに基づいて、ビタビ復号を行うステップとを含んでなるデジタルデータのアシンメトリ補正方法を提供する。
【0012】
そして、本発明は、デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出手段と、前記ヒストグラムにおいて、アシンメトリ補正後に出力値の分布の対称の中心となるべき値をチェックポイント値として求めるチェックポイント決定手段と、該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、両集合における出力値の分布がチェックポイント値を中心としてより対称に近づくように、一方の集合にある出力値を基準値として、それに他方の集合の出力値を対応づけることにより補正するアシンメトリ補正して、出力するアシンメトリ補正手段とを備える記録媒体から読み取ったデジタルデータのアシンメトリ補正装置を提供する。
【0013】
さらに、本発明は、記録媒体から読み取った信号に対してA/D変換と逆フィルタによる処理を施して得られるデジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出手段と、前記ヒストグラムにおいて、ある値以上の各出力値の出現回数の和と、その値未満の各出力値の出現回数の和とが同一またはほぼ同一になる値をチェックポイント値として求め、該チェックポイント値からアシンメトリによる波形歪みが出力値の大きい方に強く発現しているのか、小さい方に強く発現しているのかを判断してアシンメトリの方向性を決定し、このアシンメトリの方向性と前記チェックポイント値とに基づいてオフセット量を決定するオフセット量決定手段と、該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、アシンメトリによる波形歪みが小さいと決定された方の集合にある出力値を基準値として、それにもう一方の集合の出力値を対応付けるルックアップテーブルを生成するルックアップテーブル生成手段と、オフセット量に基づいてオフセット補正を行うオフセット補正手段と、前記ルックアップテーブルに基づいてアシンメトリ補正を行ってデジタル等化器へと出力する補正処理手段とを備える記録媒体から読み取ったデータのアシンメトリ補正装置を提供する。
【0014】
そして、本発明は、記録媒体からの読み取りアナログ信号をA/D変換した後にデジタル等化器による処理を行って得るデジタル等化器からの出力値を、ビタビ復号器の状態と関連づけながら、ビタビ復号器のデータパターンごとに各出力値の出現回数をヒストグラムとして表現するヒストグラム算出部と、ヒストグラムに基づいてブランチメトリックをルックアップテーブルとして計算するブランチメトリック算出部と、該ルックアップテーブルに基づいて、ビタビ復号を行うビタビ復号器とを含んでなるデジタルデータのアシンメトリ補正装置を提供する。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施態様にかかる方法を説明するフローチャートである。
【図2】本発明の第2の実施態様にかかるアシンメトリ補正装置の概要を示すブロックダイアグラムである。
【図3】パラメータ算出ユニットの動作を示すフローチャートである。
【図4】ヒストグラムが生成された時点でのパラメータAとBの算出スタート時のヒストグラムを示す。
【図5】パラメータAの算出プロセスを示すフローチャートである。
【図6】パラメータAの算出後のチェックポイントの位置を示すヒストグラムである。
【図7】パラメータBの算出プロセスを示すフローチャートである。
【図8】パラメータB算出後のヒストグラムの各項の並び替えと呼び名の変更を示すフローチャートである。
【図9】アシンメトリによる波形歪みのある側の出力値とアシンメトリによる波形歪みがない側の出力値の対応付けを示すダイアグラムである。
【図10】ルックアップテーブルの生成プロセスを示すフローチャートである。
【図11】本発明の第3の実施態様にかかるアシンメトリ補正装置を示すブロックダイアグラムである。
【図12】各データパターンについて算出されたデジタル出力値とその出現回数のヒストグラムである。
【図13】データパターンごとのヒストグラムから出力値とその発現確率を求める過程を示すフローチャートである。
【図14】非線形性のアシンメトリによる波形歪みを模式的に示すグラフである。
【図15】アシンメトリによる波形歪みを有する場合とそれがない場合での各出力値の出現回数を示すヒストグラムをグラフに示したものである。
【発明を実施するための形態】
【0016】
(第1の実施態様)
図1に、本発明の第1の実施形態のフローチャートを示す。まず、記録媒体から読み取ったデジタルデータ(S101)の各出力値の出現回数を出力値の関数として表現してヒストグラムHを作成する(S102)。ヒストグラムHは、図4に示すようなものである。このヒストグラムHは、デジタルデータの出力値の出現回数を数えて、例えば、各出力値についてその値の出現回数を出力値の小さい方から大きな方へ(負の出力値から正の出力値へと)下から上へと並べることによって生成することができる。そして、出力値のうちのある値以上の出力値と、その値未満の出力値とについて、それぞれ出現回数の和を取り、その和が同一またはほぼ同一になる(和の差がゼロまたは最小になる)出力値をチェックポイント値として求める(S103)。代替的には、出力値の最大のものと最小のものを求めて、その平均をとって、チェックポイント値とすることも可能である。このステップS102とS103とが、チェックポイント決定ステップを構成する。そして、このチェックポイント値以上の各出力値の集合と、チェックポイント値未満の各出力値の集合とに対して、アシンメトリによる波形歪みが小さい方の集合にある出力値を基準値として、アシンメトリによる波形歪みが大きい方の集合にある出力値を補正する(S104)(アシンメトリ補正ステップ)。これは、例えば、ヒストグラムHの中で、チェックポイント値を境目として、アシンメトリによる波形の歪みが少ないか、ない側が理想的な出力状態を表しているものと見なして基準値とし、ヒストグラムのチェックポイント値を挟んだ反対側の出力値を基準値に対応づけることをする。その対応関係をルックアップテーブルCとして、アシンメトリによる波形歪みが比較的大きい側の出力値を基準値と対応づけて、補正された出力値に変換する。なお、この対応関係は、ルックアップテーブルを用いる方法以外にも、ある関数に基づいて四則演算して見出すなど、種々の方法がある。そして、補正された出力値を出力する(S105)。
【0017】
上述のような本発明の一実施形態によれば、多くのハードウェアリソースを必要とすることなく、より強力なアシンメトリの補正が可能となる。なお、記録装置によっては、どちらの方向(例えば、ゼロを起点として正の側または負の側)にアシンメトリによる波形歪みが強く出るか一定の傾向があるものもある。アシンメトリによる波形歪みが強く出る側を測定しなくても明らかな場合があるので、本実施態様においてはアシンメトリがチェックポイント値のどちら側で大きいかを計測するステップをあえて含まない。
【0018】
(第2の実施形態)
以下に、本発明の第2の実施態様を説明する。図2に、本発明の一つの実施態様によるアシンメトリ補正装置を含む記録媒体からのデータ再生装置のブロック図を示す。磁気ヘッドや光学ピックアップにより記録媒体から読み出された信号は、フロントエンドプロセッサ(図示せず)により処理されたあと、アナログ/デジタル変換器1に入力される。その後、例えば6ビット程度のビット数を有するデジタル出力は、アシンメトリ補正装置10に入力される。アシンメトリ補正装置10は、アシンメトリ補正ユニット11とパラメータ算出ユニット12とからなり、アシンメトリ補正ユニット11は、逆フィルタ13とオフセット補正部14,補正テーブルに基づいてアシンメトリの補正を行う補正処理部15を備えており、パラメータ算出ユニット12は、ヒストグラム算出器16 とパラメータ出力部17 とを備えている。ヒストグラム算出器16は、逆フィルタ13から出力されたデジタル信号の各値と各値の出現回数をヒストグラムとして表す。パラメータ出力部17は 、このヒストグラムに基づいて、アシンメトリの方向性とオフセット補正の補正量を決定する。パラメータ算出ユニット12は 、ヒストグラムと、アシンメトリ方向性と、オフセット補正量とに基づいて、アシンメトリ補正用のルックアップテーブルを生成する。オフセット補正量は、オフセット補正器14に入力されて、オフセット補正が行われる。また、ルックアップテーブルはアシンメトリ補正ユニット11にある補正処理部15に入力され、さらなる補正処理が行われる。補正処理部15から出力された信号は、デジタル等化器3とビタビ復号器4により処理されて2値化データとして出力される。
【0019】
ここで、逆フィルタ13としては、FIRフィルタを用いることができる。このFIRフィルタは、例えば、5タップ程度のFIRフィルタでよい。タップ係数は、経験的に得られる定数である5つの係数D0,D1,D2,D3,D4である。 この5タップの場合、逆フィルタ13の入力in(k)と出力X(k)の関係は次のようになる。
X(k)=Σ4m=0{Dm・in(k-m)}
【0020】
オフセット補正部14によるオフセット調整は、次の式により与えられる。
Y(k)=X(k)-B
ここで、Bは、パラメータ算出ユニット12、より具体的には、パラメータ出力部17 から得られるパラメータBの値であり、Y(k)が出力となる。
【0021】
補正処理部15は、パラメータ算出ユニット12、より具体的にはパラメータ出力部17 から得られるルックアップテーブルを含んでいて、そのルックアップテーブルに基づいてアシンメトリの補正を行う。
【0022】
次に、パラメータ算出ユニット12の動作を説明する。パラメータ算出ユニット12においては、図3のフローチャートに示すように、まず、ヒストグラム算出器16が逆フィルタ13の出力を得て(S1)、ヒストグラムHを生成する(S2)。つぎに、パラメータ出力部17 が、このヒストグラムに基づいてアシンメトリの極性を示すパラメータAを計算し(S3)、さらに、ヒストグラムHに基づいて、オフセット調整のためのパラメータBを計算する(S4)。このパラメータBはオフセット補正器14に入力されて、オフセット補正処理に用いられる。その後、パラメータ出力部17 が補正処理部15で用いるルックアップテーブルC(パラメータC)を生成する(S5)。
【0023】
まず、ヒストグラム算出器16 により、長さLのヒストグラムHを生成する。Lの値は、一般に、逆フィルタ13の出力値の範囲を示す。例えば、6ビットの出力であればLは64となるが、出力がない部分を省略して、Lの値として64より小さい値を採用することもできる。もちろん逆フィルタ13の出力は6ビットに限定されるものではない。このヒストグラムHは、逆フィルタ13のそれぞれの出力値の出現回数を数えて、各出力値についてその値の出現回数を出力値の小さい方から大きな方へと(負の出力値から正の出力値へと)下から上へL個並べることによって生成することができる。図4に示すように、逆フィルタ13からの各出力値の出現回数を表にする。このときの各出力値の出現回数を出力値の小さい方(6ビット出力の場合は−32)からH(1)で始めて、最大の出力値(6ビット出力の場合は31)の出現回数をH(L)とする。ここで、ヒストグラム中にあるチェックポイントの下にある出現回数の合計をSum1とし、チェックポイントの上にある出現回数の合計をSum2とする。このチェックポイントは、スタート時にはヒストグラムの中央にあって、Sum1とSum2が求められる。
【0024】
一般に、Sum1とSum2の値は異なるが、これらの値に基づいてアシンメトリの極性または方向性を表すパラメータAを求めることができる。図5に示すように、まず、ヒストグラムHに基づいてSum1とSum2を計算する(S12)。このときチェックポイント(スタート時のチェックポイント)は、上述のように、L/2+1とL/2の間にある(この状態をチェックポイントがL/2にあるという)。スタート時のSum1がSum2よりも大きければ、パラメータA(PA)を1とし、さもなければパラメータA(PA)を0とする(S13、S14,S15)。パラメータAが1であれば、負の方向の信号振幅が小さく(通常、負の出力値の方で非線形性が強く表れた状態)、パラメータAがゼロであれば、正の方向の信号振幅が小さいこと(通常、正の出力値の方で非線形性が強く表れた状態)を示す。さらに、図6に示すように、このチェックポイントを上下に移動させることにより、Sum1とSum2の値が同一となるようにすることができる。スタート時のチェックポイントの位置とSum1とSum2が等しくなるかその差が最小になるチェックポイントの位置との距離に基づいて、オフセット調整のためのパラメータBを算出することができる。このパラメータBの計算は、図6に示すようにして行うことができる。つまり、要素数がLである所与のヒストグラムH(S21)に対して、チェックポイントの位置MをL/2にまず設定して(S22)、Sum1とSum2を求める(S23)。先に求めたパラメータAの値がゼロであれば(S24)、このSum1がSum2より大きいかを判断して(S25a)、もしそうであれば、パラメータBの値を現在のMの値からL/2引いたものとし(S26a)、もしそうでなければ、チェックポイントの位置Mを1だけ増やして(S27a)、Sum1とSum2の計算を再度行う(S23)。パラメータAがゼロでない、つまり1であれば(S24)、Sum2がSum1以上であるかを判断して(S25b)、もしそうであれば、パラメータBの値をその時点でのMの値からL/2引いたものとする(S26b)。さもなければ、Mの値を1だけ減らして(S27b)、Sum1とSum2の計算(S23)に戻る。その結果、パラメータBが決まり、チェックポイントの位置は、L/2からMへと移動することになる。
【0025】
このようにして、Sum1とSum2が等しくなるかほぼ等しくなるチェックポイントが見つかり、パラメータBの値が定まった段階で、先に求めてあるヒストグラムを再構成する。つまり、図8に示すように、ヒストグラムのチェックポイントより上の部分であるH(M+1)〜H(L)の値はそのままにしておいた上で、それぞれの呼び方をH_up(L−M)〜H_up(1)と変更する(図8の(c)から(d))。これは、各エントリの呼び方を変えるだけで、数値のならびはもとと同じである。チェックポイントより下の部分であるH(M)〜H(1)については、この下の部分において一番上にあるH(M)の値がヒストグラムの一番下になるように、一番下にあるH(1)の値が下の部分で一番上になるように、ヒストグラムの上下を反転する(図8の(b)から(c))。すると上から下へH(1)からH(M)と並ぶことになる。ここで、各エントリの名前を変更する。つまりH(1)をH_dn(M)とし、下に向かって順次、H_dn(M−1)、H_dn(M−2)としていき、H(M)をH_dn(1)とする(図8の(c)から(d))。ここで、upとdnは、アシンメトリの極性、つまりパラメータAの値により定まる。すなわち、アシンメトリによる波形歪みが強い側をH_upとするのである。H_dnは、アシンメトリによる波形歪みがないか少ない方であり、理想的な出力値が得られていると近似的に見なすことができる。スタート時にSum1のほうが大きく、パラメータAが1であれば、負の出力値の方向にアシンメトリによる波形歪みが見られることになり、H_upはアシンメトリが見られる図示したヒストグラムの上部となり、H_dnは下部となる。そしてパラメータAがゼロであれば、逆になる。
【0026】
つぎに、図9のように、非線形性の歪みが少ないか、ない側のヒストグラムH_dnが理想的な出力状態を表しているものと見なして基準値とし、歪みが大きい側のヒストグラムH_upをH_dnに対応づけることをする。つまりヒストグラムH_upのそれぞれの項H_up(k)(k=1,・・・,L−M)、出力値i(k)に対応しているわけであるが、この歪みが大きい側の出力値を、歪みが小さい側のヒストグラムH_dnの項の出力値j(m)(m=1,・・・,M)に関連づけて、その結果をルックアップテーブルCとする。
【0027】
このルックアップテーブルCの作成は、次のようにして行うことができる。波形歪みのある側のデータは、正常なあるいは理想的なデータからアシンメトリにより「圧縮」されていると考えることができるので、どの出力値から現在測定された値に圧縮されているのかの対応関係を計算する。この計算は、例えば、H_up(L−M)=H_dn(M)+H_dn(M−1)+H_dn(M−2)であれば、H_up(L−M)の出力値i(L−M)は、H_dn(M),H_dn(M−1),H_dn(M−2)の項に対応する出力値j(M)とj(M−1)とj(M−2)から圧縮されたと判断し、出力値i(L−M)の補正後の値は、j(M)とj(M−1)とj(M−2)の平均値であると定めることができる。なお、対応関係付けは、対応関係さえ一義に見つけ出せればいいので、上述の計算方法に限らず、種々の計算方法を考えることができる。
【0028】
すなわち、このようなルックアップテーブルCの決定は、一例として、図10のフローチャートに示すように実行することができる。上述のように、ヒストグラムHとそれを変形して得た二つのヒストグラムH_upとH_dnを求める(S31,S32)。そして、変数PupとPdnをPup=L−MとPdn=Mと設定する(S33)。そして、変数Pkの値(正の整数値をとる)を変えながら、H_up(Pup)=H_dn(Pdn)+…+H_dn(Pk)になるPkを求める(S34)。Pkが求まると、H_dn(Pdn),…,H_dn(Pk)の項に対応する出力値j(Pdn),…,j(Pk)のある関数として修正された出力値i’(Pup)を表す。つまり、i’(Pup)=f(j(Pdn),…,j(Pk))となる。ここで、fは任意の関数であり、特に限定されるものではないが、典型的には、各変数となる対応する理想的状態の出力値の平均値となろう。ここで、Pup=Pup−1とPdn=Pk−1として、S34にもどる。これがPup=1になるまで繰り返される(S37)。
【0029】
このようにしてオフセット補正値であるパラメータBとルックアップテーブルCが求められた結果、図2に示すように、逆フィルタ13からの出力に対して、パラメータAとパラメータBによる数2のオフセット補正(オフセット補正部14)と補正テープルによる実際の出力値と推定される理想的と考えられる基準値との関連づけ(補正処理部15)を行って、アシンメトリ補正ユニット11の出力、ひいては、アシンメトリ補正装置10の出力として、デジタル等化器3へ入力することができる。なお、このようなルックアップテーブルは、ディスドライブの製造時に作成して置き、それを使用し続けることもできるし、ある一定の時間的間隔で、更新するようにして、更新されたものを使用するようにすることもできる。
【0030】
本実施形態によれば、オフセットとアシンメトリの両方について精度が高い補正を行うことができる。
【0031】
(第3の実施態様)
次に、本発明のヒストグラムを用いたアシンメトリ補正技術をビタビ復号器に組み込む例を第3の実施態様として説明する。この実施態様の装置は、図11に示すように、記録媒体からのデータ読み取り装置(図示せず)からの出力を受けるA/D変換器21と、デジタル等化器25とビタビ復号器26とを備えるアシンメトリ補正ユニット22と、デジタル等化器25からの出力とビタビ復号器26からの出力を受けてヒストグラムを計算するヒストグラム算出部28とそのヒストグラム算出部28の出力に基づいてパラメータDを計算するパラメータ出力部29とを含むパラメータ算出ユニット23とを備えるものである。すなわち、本実施態様では、デジタル等化器25からの出力値についてビタビ復号器26のデータパターンごとにヒストグラムを作成し、ビタビ復号器の入力値の各パターンの発生確率を計算する。そして、ビタビ復号器26の入力値の出現確率をパラメータDとしてビタビのブランチメトリックの計算を行うものである。
【0032】
まず、ビタビ復号器26には、2d個の状態があるものとする。ここで、dは1以上の整数である。そのときこのビタビ復号器26に関連するデータパターンの長さはd+1となる。例えば、d=1であれば、2状態のビタビ復号器ということになり、データパターンの長さは2となる。具体的なデータパターンは、[00],[01],[10],[11]であって、一般的には、その数nはn=2(d+1)となる。図12に示すように、データパターンのそれぞれについて、ヒストグラムを作成する。次いで、このヒストグラムを用いてパラメータDを計算することになるが、このパラメータDは、ある入力値に対する各データパターンの発生確率を示すものである。
【0033】
ヒストグラムの生成は、次の前提に基ついて行う。ビタビの復号結果をVとし、ある時点kにおいて、ビタビ復号器の復号結果をV(k), V(k-1), … V(k-m)とする(ここで、V(k), V(k-1)…は既に分かった状態にある)。そして、時点kの入力値I(k)も分かった状態である。I(k)の大きさは、i(1), i(2)…i(L)の内、どれかである。d = 1(2状態のビタビ)の場合、データパターンは2ビットである。その際、V(k)とV(k-1)を用いて、データパターンを表す。例えば、V(k-1) =1、V(k) =0の場合、データバターンは[10]を示す。そうすることによって、ある時間が経つと、それぞれのデータパターンについて、入力値Iに対するヒストグラムが生成される。
【0034】
時点kでは、ある一つのデータパターンに関する計算しかできないが、ある時間が経つと、各データパターンにおいて、それぞれの入力値に対するヒストグラムを計算していくことが出来る。このヒストグラムを用いて、それぞれのデータパターンにおいて、入力値Iの内、大きさi(1)から、大きさi(L)の出現確率を算出する。そして、ビタビ復号器内、各可能なデータパターンで、予め算出した確率を比較することにより、最適なデータパターンを選ぶことによって復号を行う。
【0035】
図12に示すように、各ヒストグラムは、デジタル等化器25からの各出力値i(m)(mは、1からLの整数)の出現回数H(m)を表すものである。これを、上述のようなd=1の場合には、4つのデータパターンについて作成するので、ヒストグラムH1,H2,H3,H4が作成される。
【0036】
このようにして作成されたデータパターンごとのヒストグラムH1,H2,H3,H4に基づいて、図13のようにして各データパターンの発生確率を表すパラメータD1,D2,D3,D4を計算することができる。まず、ヒストグラムH1を例にとってみる。上述のように、デジタル等化器25からの各出力値i(m)の出現回数をH1(m)として、すべての出力値についてこれを求めてヒストグラムH1(H1(1)〜H1(L))がデータパターン1について作成される(図13(a))。そして、H1(m)の各要素の和をSumH1とする。SumH1=(H1(1)+H1(2)+…+H1(L)となる。そして、ヒストグラムの各項の値をSumH1で割って、新たな要素とする(図13(b))。そして、各項の値H1(m)/SumH1は全く同じままでその名前をパラメータPD1(m)とする。つまり、パラメータPD1(m)は、データパターン1におけるデジタル等化器25からの出力値i(m)の出現確率を表すことになる(図13(c))。
【0037】
本実施例のビタビ復号方法は、従来のビタビ復号方法と比べてブランチメトリックの算出方法が異なり、アシンメトリの補正機能をパラメータDを利用して実現する。まず、k時点における、状態S(i)からS(j)への遷移を考える。S(i)は、xk−dxk−d+1…xk−1とし、S(j)は、xk−d+1xk−d+2…xkとする。すると、従来のビタビのブランチメトリックBM(rk;xk−dxk−d+1…xk)は、
BM(rk;xk−dxk−d+1…xk)
={rk−m(xk−d,xk−d+1,…,xk)}2
となる。ここで、rkは時点kでの入力値であり、mは、パーシャルリスポンス(PR)方式におけるパターン(xk−d,xk−d+1,…,xk)の理想値である。dは、段落番号0031で出てきたdに他ならない。基本的に、BMの関数は、各時点、入力値rkは、パターン(xk−d,xk−d+1,…,xk)に関する条件付き確率密度の自然対数である。その時のノイズがガウス分布である場合あるいはそのように仮定できる場合には、条件付き確率密度の対数を(rk−m(xk−d,xk−d+1,…,xk))2で表す。ここで、対数をとるのは、次のような理由による。まず、ビタビ復号器は最大尤度検出器(maximum Likelihood detector)である。その動作は、次の確率の積が最大になるような復号を探すことによってなされる。すると、上式から分かるように、各時点の確率の積を取って計算する必要があるが、対数を用いれば、この乗算を加算にすることで、簡単化できるのである。
【0038】
ここで、この従来のビタビの検出方法によれば、m(xk−p,xk−p+1,…,xk)は、パターン(xk−pxk−p+1…xk)とパーシャルレスポンス目標値によって計算されるので、非線形性の影響を打ち消すようにはできない。その結果、現実の値rと理想値mの差を表すブランチメトリック値は正確に計算できず、ビタビ検出の性能は低下する。そこで、本実施例では、パラメータDを利用してブランチメトリックを次のように計算することにより、アシンメトリの補正機能を加える。
BM(rk;xk−pxk−p+1…xk)
=−log(D(rk|xk−pxk−p+1…xk))
とする。ここで、D(rk|xk−pxk−p+1…xk)は、入力値rkに対応したパラメータDの値であり、時点kの入力値rkのパターン(xk−pxk−p+1…xk)の条件付き確率であるととらえることができる。これは、図12に関連して上述のようにして得られたパラメータDの値をルックアップテーブルの形にして記憶装置に保存しておくことで、利用することができるものである。このルックアップテーブルは、記録媒体のドライブを製造する際に設定してそれを継続して使用することもできるし、ある間隔あるいはあるタイミングで更新していくようにすることもできる。ブランチメトリックの計算は統計情報Dを用いて行う。パラメータDはアシンメトリの非線形性を自然に含むものなので、より正確なブランチメトリックの計算、そして比較ができると考えられる。ここで、d= 4の場合、データパターンの長さは5となり、バターン数は25=32個。ルックアップテーブルの数は32個。各テーブルの大きさは、rkの範囲で決まる。rkの可能な値が16個であれば、各テーブルの大きさは16である。よって、ルックアップテーブル全体のサイズは32×16となる。
【符号の説明】
【0039】
1 A/D変換器
3 デジタル等化器
4 ビタビ復号器
10 アシンメトリ補正装置
11 アシンメトリ補正ユニット
12 パラメータ算出ユニット
13 逆フィルタ
14 オフセット補正部
15 補正処理部
16 ヒストグラム算出器
17 パラメータ出力部
【特許請求の範囲】
【請求項1】
デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出ステップと、
前記ヒストグラムにおいて、アシンメトリ補正後に出力値の分布の対称の中心となるべき値をチェックポイント値として求めるチェックポイント決定ステップと、
該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、両集合における出力値の分布がチェックポイント値を中心としてより対称に近づくように、一方の集合にある出力値を基準値として、それに他方の集合の出力値を対応付けることにより補正するアシンメトリ補正ステップと
を含んでなる記録媒体から読み取ったデータのアシンメトリ補正方法。
【請求項2】
記録媒体から読み取った信号にA/D変換を実行し、次いで逆フィルタによる処理を行うデジタルデータの前処理ステップを前記ヒストグラム算出ステップに先立って行い、
前記チェックポイント決定ステップが、前記ヒストグラムにおいて、ある値以上の各出力値の出現回数の和と、その値未満の各出力値の出現回数の和とが同一またはほぼ同一になる値をチェックポイント値とするものであり、
前記アシンメトリ補正ステップが、
アシンメトリによる波形歪みが出力値の大きい方に強く発現しているのか、小さい方に強く発現しているのかを判断するアシンメトリ方向性決定ステップと、
チェックポイント値とアシンメトリ方向性とに基づいてオフセット量を決定するオフセット量決定ステップと、
該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、アシンメトリ方向性決定ステップでアシンメトリによる波形歪みが小さいと決定された方の集合にある出力値を基準値として、それにもう一方の集合の出力値を対応付けるルックアップテーブルを生成するルックアップテーブル生成ステップと、
前記オフセット量と前記ルックアップテーブルとに基づいて、デジタルデータを補正する補正処理ステップと
を含んでなり、
前記アシンメトリ補正ステップのあとに、補正されたデジタルデータをデジタル等化器へと出力する出力ステップを実行するものである
請求項1に記載の記録媒体から読み取ったデータのアシンメトリ補正方法。
【請求項3】
記録媒体から読み取ったアナログ信号をA/D変換した後にデジタル等化器による処理を行う前処理ステップと、
デジタル等化器からの出力値をビタビ復号器の状態と関連づけながら、ビタビ復号器のデータパターンごとに各出力値の出現回数をヒストグラムとして表現するヒストグラム算出ステップと、
該ヒストグラムに基づいてブランチメトリックをルックアップテーブルとして計算するブランチメトリック算出ステップと、
該ルックアップテーブルに基づいて、ビタビ復号を行うステップと
を含んでなる記録媒体から読み取ったデータのアシンメトリ補正方法。
【請求項4】
デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出手段と、
前記ヒストグラムにおいて、アシンメトリ補正後に出力値の分布の対称の中心となるべき値をチェックポイント値として求めるチェックポイント決定手段と、
該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、両集合における出力値の分布がチェックポイント値を中心としてより対称に近づくように、一方の集合にある出力値を基準値として、それに他方の集合の出力値を対応づけることにより補正するアシンメトリ補正して、出力するアシンメトリ補正手段と
を備える記録媒体から読み取ったデジタルデータのアシンメトリ補正装置。
【請求項5】
前記デジタルデータの各出力値が、記録媒体から読み取った信号に対してA/D変換と逆フィルタによる処理を施して得られるものであり、
前記アシンメトリ補正手段が、
前記ヒストグラムにおいて該チェックポイント値からアシンメトリによる波形歪みが出力値の大きい方に強く発現しているのか、小さい方に強く発現しているのかを判断してアシンメトリの方向性を決定し、このアシンメトリの方向性と前記チェックポイント値とに基づいてオフセット量を決定するオフセット量決定手段と、
該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、アシンメトリによる波形歪みが小さいと決定された方の集合にある出力値を基準値として、それにもう一方の集合の出力値を対応付けるルックアップテーブルを生成するルックアップテーブル生成手段と、
オフセット量に基づいてオフセット補正を行うオフセット補正手段と、
前記ルックアップテーブルに基づいてアシンメトリ補正を行ってデジタル等化器へと出力する補正処理手段と
を備えるものである、請求項4に記載の記録媒体から読み取ったデータのアシンメトリ補正装置。
【請求項6】
記録媒体から読み取ったアナログ信号をA/D変換した後にデジタル等化器による処理を行って得るデジタル等化器からの出力値を、ビタビ復号器の状態と関連づけながら、ビタビ復号器のデータパターンごとに各出力値の出現回数をヒストグラムとして表現するヒストグラム算出部と、
ヒストグラムに基づいてブランチメトリックをルックアップテーブルとして計算するブランチメトリック算出部と、
該ルックアップテーブルに基づいて、ビタビ復号を行うビタビ復号器と
を含んでなる記録媒体から読み取ったデータのアシンメトリ補正装置。
【請求項1】
デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出ステップと、
前記ヒストグラムにおいて、アシンメトリ補正後に出力値の分布の対称の中心となるべき値をチェックポイント値として求めるチェックポイント決定ステップと、
該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、両集合における出力値の分布がチェックポイント値を中心としてより対称に近づくように、一方の集合にある出力値を基準値として、それに他方の集合の出力値を対応付けることにより補正するアシンメトリ補正ステップと
を含んでなる記録媒体から読み取ったデータのアシンメトリ補正方法。
【請求項2】
記録媒体から読み取った信号にA/D変換を実行し、次いで逆フィルタによる処理を行うデジタルデータの前処理ステップを前記ヒストグラム算出ステップに先立って行い、
前記チェックポイント決定ステップが、前記ヒストグラムにおいて、ある値以上の各出力値の出現回数の和と、その値未満の各出力値の出現回数の和とが同一またはほぼ同一になる値をチェックポイント値とするものであり、
前記アシンメトリ補正ステップが、
アシンメトリによる波形歪みが出力値の大きい方に強く発現しているのか、小さい方に強く発現しているのかを判断するアシンメトリ方向性決定ステップと、
チェックポイント値とアシンメトリ方向性とに基づいてオフセット量を決定するオフセット量決定ステップと、
該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、アシンメトリ方向性決定ステップでアシンメトリによる波形歪みが小さいと決定された方の集合にある出力値を基準値として、それにもう一方の集合の出力値を対応付けるルックアップテーブルを生成するルックアップテーブル生成ステップと、
前記オフセット量と前記ルックアップテーブルとに基づいて、デジタルデータを補正する補正処理ステップと
を含んでなり、
前記アシンメトリ補正ステップのあとに、補正されたデジタルデータをデジタル等化器へと出力する出力ステップを実行するものである
請求項1に記載の記録媒体から読み取ったデータのアシンメトリ補正方法。
【請求項3】
記録媒体から読み取ったアナログ信号をA/D変換した後にデジタル等化器による処理を行う前処理ステップと、
デジタル等化器からの出力値をビタビ復号器の状態と関連づけながら、ビタビ復号器のデータパターンごとに各出力値の出現回数をヒストグラムとして表現するヒストグラム算出ステップと、
該ヒストグラムに基づいてブランチメトリックをルックアップテーブルとして計算するブランチメトリック算出ステップと、
該ルックアップテーブルに基づいて、ビタビ復号を行うステップと
を含んでなる記録媒体から読み取ったデータのアシンメトリ補正方法。
【請求項4】
デジタルデータの各出力値の出現回数を該出力値の関数であるヒストグラムとして表現するヒストグラム算出手段と、
前記ヒストグラムにおいて、アシンメトリ補正後に出力値の分布の対称の中心となるべき値をチェックポイント値として求めるチェックポイント決定手段と、
該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、両集合における出力値の分布がチェックポイント値を中心としてより対称に近づくように、一方の集合にある出力値を基準値として、それに他方の集合の出力値を対応づけることにより補正するアシンメトリ補正して、出力するアシンメトリ補正手段と
を備える記録媒体から読み取ったデジタルデータのアシンメトリ補正装置。
【請求項5】
前記デジタルデータの各出力値が、記録媒体から読み取った信号に対してA/D変換と逆フィルタによる処理を施して得られるものであり、
前記アシンメトリ補正手段が、
前記ヒストグラムにおいて該チェックポイント値からアシンメトリによる波形歪みが出力値の大きい方に強く発現しているのか、小さい方に強く発現しているのかを判断してアシンメトリの方向性を決定し、このアシンメトリの方向性と前記チェックポイント値とに基づいてオフセット量を決定するオフセット量決定手段と、
該チェックポイント値以上の出力値の集合と、該チェックポイント値未満の出力値の集合とに対して、アシンメトリによる波形歪みが小さいと決定された方の集合にある出力値を基準値として、それにもう一方の集合の出力値を対応付けるルックアップテーブルを生成するルックアップテーブル生成手段と、
オフセット量に基づいてオフセット補正を行うオフセット補正手段と、
前記ルックアップテーブルに基づいてアシンメトリ補正を行ってデジタル等化器へと出力する補正処理手段と
を備えるものである、請求項4に記載の記録媒体から読み取ったデータのアシンメトリ補正装置。
【請求項6】
記録媒体から読み取ったアナログ信号をA/D変換した後にデジタル等化器による処理を行って得るデジタル等化器からの出力値を、ビタビ復号器の状態と関連づけながら、ビタビ復号器のデータパターンごとに各出力値の出現回数をヒストグラムとして表現するヒストグラム算出部と、
ヒストグラムに基づいてブランチメトリックをルックアップテーブルとして計算するブランチメトリック算出部と、
該ルックアップテーブルに基づいて、ビタビ復号を行うビタビ復号器と
を含んでなる記録媒体から読み取ったデータのアシンメトリ補正装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−181150(P2011−181150A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−45829(P2010−45829)
【出願日】平成22年3月2日(2010.3.2)
【出願人】(509241085)株式会社シグリード (4)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月2日(2010.3.2)
【出願人】(509241085)株式会社シグリード (4)
【Fターム(参考)】
[ Back to top ]