
記録条件の調整方法及び光ディスク装置
【課題】高密度記録に対応する記録条件の調整に関して、マークのエッジ位置を高精度に制御可能な記録調整方法を提供する。
【解決手段】光ディスクから得た再生信号波形を適応等化方式とPRML方式前記PRML方式によって2値化して得た2値化ビット列に基づいて、長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,エッジシフト評価値が最小になるように,パルス列における最終のパルスであるラストパルスの開始位置を調整する。これにより、記録パルス調整単位がチャネルビット周期の1/16である条件においても,マークの後エッジ位置を高精度に制御できる。
【解決手段】光ディスクから得た再生信号波形を適応等化方式とPRML方式前記PRML方式によって2値化して得た2値化ビット列に基づいて、長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,エッジシフト評価値が最小になるように,パルス列における最終のパルスであるラストパルスの開始位置を調整する。これにより、記録パルス調整単位がチャネルビット周期の1/16である条件においても,マークの後エッジ位置を高精度に制御できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は,記録媒体上に物理的性質が他の部分とは異なる記録マークを形成し,情報を記憶する光ディスク媒体への情報を記録する記録条件の調整方法、それを用いた光ディスク装置及び情報記録方法に関する。
【背景技術】
【0002】
光ディスク媒体としてはCD−R/RW,DVD−RAM,DVD±R/RW,BD等多くのものが存在し,データ層を2層持つ媒体も含めて広く一般に普及している。対応する光ディスク装置としては,CD−R/RW,DVD−RAM,DVD±R/RWの記録/再生に対応した,いわゆるDVDスーパーマルチドライブが普及している。今後はBDに対応する高機能ドライブが普及していくものと考えられ、さらに大容量の光ディスクの登場が望まれている。
【0003】
光ディスクの高速化と高密度化に伴いPRML(Partial Response Maximum Likelihood)再生方式による再生信号の2値化技術が必須になってきている。PRML方式の1つとして,目標信号レベルを再生信号に応じて適応的に変化させる適応PRMLまたは補償PRML方式がある。非特許文献1「電子情報通信学会論文誌CJ90−C,pp.519 (2007)」によれば,こうしたPRML方式を用いて,再生信号のアシンメトリ及び記録時の熱干渉を補償することによって,BD対応の装置で,35GB容量相当の高密度化が実現可能なことが示されている。使用されるPRML方式の拘束長(クラスを表すビット長)に応じて,拘束長が長い程,高密度条件での再生性能が高いことが示されている。こうしたPRML方式を備えた光ディスク装置では、最良の2値化結果を得るために、再生信号とPRMLの目標信号とのRMS誤差を最小にするような自動等化器が搭載される。自動等化器はタップ係数が可変なFIR(Finite Impulse Response)フィルターとして実装されることが一般的である。
【0004】
光ディスクの記録密度を増加させると、光スポットの大きさに比較して記録マークの大きさが小さくなり、得られる再生信号の振幅も小さくなる。光スポットの分解能は波長λと対物レンズの開口数NAによって定まり、最短ラン長の記録マークの長さがλ/4NA以下になると、その繰り返し信号の振幅がゼロになる。これは一般に光学カットオフとして知られている現象であり、BDにおいてはλ/4NA≒119nmである。BDにおいてトラックピッチを一定とした場合、容量約31GB以上を実現しようすると最短ラン長である2Tの繰り返し信号の振幅がゼロになる。こうした高密度条件において良好な再生性能を得るためにはPRML方式の利用が必須である。
【0005】
記録型光ディスクでは、パルス状に強度変調されたレーザ光(以下記録パルス)を用いて、記録膜の結晶状態等を変化させることで所望の情報を記録する。記録膜としては相変化材料や有機色素、ある種の合金や酸化物等が用いられており、広く一般に知られている。CD、DVD、およびBDにおいて用いられるマークエッジ符号方式では、前後のエッジ位置によってコード情報が定まる。
【0006】
図43は,BDで用いられる記録方式の一つである「N−1記録ストラテジ」における記録パルス波形を示した図である。この記録ストラテジでは,NTの長さのマークを(N−1)本のパルスを用いて記録する。図43には,BDのコードに用いられる2T〜9T(Tはチャネルビット長)の長さのマークのうち,2T〜5Tのマークを記録するパルス列を示している。パルス列における最初の最大パワーパルスはファーストパルス,最終の最大パワーパルスはラストパルスと呼ばれる。ファーストパルスとラストパルスの間の複数の最大パワーパルスはマルチパルスと呼ばれ,4Tマークの場合は1本,以降マーク長が1T増える毎に1本ずつ増える。2Tマークのパルス列における最大パワーパルスはファーストパルスのみであり,3Tマークのパルス列における最大パワーパルスはファーストパルスとラストパルスであり,それぞれマルチパルスを含まない。パルス列における最終の最大パワーパルスの直後のパルスはクーリングパルスと呼ばれる。
【0007】
レーザ光の出力パワーレベルとしては,ライトパワーPW,スペースパワー(イレーズパワー)PS,バイアスパワーPBW,クーリングパワーPCの4種類がある。ライトパワーPWはパルス列における最大パワーレベルであり,ファーストパルス,マルチパルス及びラストパルスのパワーレベルである。このパワーレベルは記録膜にエネルギーを投入して状態変化を起こさせるために用いられる。スペースパワーPSは,マーク間(スペース)となる部分に照射するパワーレベルであり,追記型ディスクに対しては主に次のマークを形成するための予熱に用いられ,相変化記録膜を用いた書き換え型ディスクに対しては主にマークを消去してスペースに変化させることで直接書き換えを行うために用いられる。クーリングパワーPCは,クーリングパルスのパワーレベルであり,追記型ディスクに対しては主に後続マーク記録部への熱の拡散を遮断し熱干渉を低減する目的で用いられ,書き換え型ディスクに対しては主に記録膜の加熱後の急冷により非晶質のマークを形成する目的で用いられる。なお,上記の各パワーレベルはマーク長によらず一律の値を用いる。
【0008】
また,パルスのタイミングに関するパラメータとしては,ファーストパルスの始端位置dTtop,ファーストパルスの時間幅Ttop,マルチパルスの時間幅TMP,ラストパルスの時間幅TLP及びクーリングパルスの終端位置dTS(dTE)がある。ここで,dTtop及びdTS(dTE)は,記録データのNRZIチャネルビット信号を基準として図43に示したように定義される。これらのパラメータの調整単位はチャネルビット周期の1/16である。
【0009】
上記のパルスパラメータのうち,記録マークの前エッジの形成条件を主として定めるdTtopおよびTtopと,記録マークの後エッジの形成条件を主として定めるTLP及びdTS(dTE)が,記録した情報の品質を良好に保つために重要である。このため,BDにおいては,記録マークの長さおよび先行または後続するスペースの長さに応じて上記のパラメータを適応的に変化させる適応型記録パルスを用いる。dTtop及びTtopの値は記録マークの長さと記録マークの直前のスペース(先行スペース)の長さとの組み合わせのパターンで分類して指定し,TLP及びdTS(dTE)の値は,記録マークの長さとマークの直後のスペース(後続スペース)の長さとの組み合わせのパターンで分類して指定する。また,図示しないがTMPはマーク長やスペース長によって分類せず,4T以上の全てのマークに対して一律の値が指定される。
【0010】
前述のような高密度条件においては、形成する記録マークが微細化するため、従来よりも高精度に記録パルスの照射条件(以下、記録条件)を定める必要がある。一方、光ディスク装置の光スポットの形状は、光源の波長、波面収差、フォーカス条件、ディスクのチルト等によって変動する。また、環境温度や経時変化によって、半導体レーザのインピーダンスや量子効率が変化するため、記録パルスの形状も変動する。このように、個体ごと、環境ごとに変動する光スポットの形状と記録パルスの形状に対応して、常に最良の記録条件を得るための調整技術は一般的に試し書きと呼ばれる。記録密度の向上に従って、試し書きによる記録条件の調整技術は重要度を増していく。
【0011】
記録条件の調整技術は、大きく2つの方法に分類される。1つはビットエラーやバイトエラー率を指標とした方法であり、もう1つは、ジッタ等の統計的な指標を用いる方法である。前者は記録されたデータに対して小さな確率で発生する事象に注目したものであり、後者は記録されたデータの平均的な品質に注目したものである。例えば、追記型光ディスクについて考えると、記録条件を変化させながら複数の箇所にデータを記録再生した場合、前者では最良の記録条件であっても記録した個所に指紋があるとビットエラーやバイトエラーが大きくなるため、これを選択することができない。最良の記録条件とはそれによって記録されたデータの平均的な品質を最良とするものであるべきなので、光ディスクのように、媒体欠陥、指紋、埃等の影響を避けることができないストレージ・システムにおいては、統計的な指標を用いる方法が優れていると言える。
【0012】
PRML方式に対応し、記録したデータの品質を統計的に評価する方法としては、Jpn. J. Appl. Phys. Vol. 43, pp.4850 (2004)(非特許文献2)、特開2003−141823号公報(特許文献1)、特開2005−346897号公報(特許文献2)、特開2005−196964号公報(特許文献3),特開2004−253114号公報(特許文献4)および特開2003−151219号公報(特許文献5)などに記載されている技術がある。
【0013】
特許文献1には,最も確からしい状態遷移列に対応する確からしさPaと,2番目に確からしい状態遷移列に対応する確からしさPbを用い,|Pa-Pb|の分布によって再生信号の品質を評価する技術が開示されている。非特許文献2には、再生信号から得られた2値化ビット列(最も確からしい状態遷移列に対応)の目標信号と再生信号とのユークリッド距離(Paに対応)と、注目するエッジが1ビットシフトした2値化ビット列(2番目に確からしい状態遷移列に対応)の目標信号と再生信号とのユークリッド距離の差(Pbに対応)の絶対値から、2つの目標信号の間のユークリッド距離を減算した値をMLSE(Maxmum Likelihood Sequence Error)と定義し、記録パターンごとにMLSEの分布の平均値がゼロになるように、記録条件を調整する技術が開示されている。
【0014】
特許文献2には,エッジシフトに注目し、再生信号のエッジ部が左右にシフトする誤りパターンに仮想的な1Tラン長を含むパターンを用いるとともに,エッジシフトの方向に基づいて,符号付きシーケンス誤差の差を求めることによってエッジシフト量を求め、これをゼロに近づけるように記録条件を調整する技術が開示されている。この評価指標はV−SEAT(Virtual state based Sequence Error for Adaptive Target)と呼ばれる。
【0015】
特許文献3および特許文献4には、正パターンと対応する誤パターンの組み合わせを予め収納したテーブルを利用することによって,再生信号と正パターン及び誤パターンのユークリッド距離の差を計算し,その平均値と標準偏差から求めた推定ビットエラー率SbER(Simulated bit Error Rate)を求める技術が開示されている。
【0016】
特許文献5には、再生信号と正パターン及び誤パターンのユークリッド距離の差に基づいて、注目するエッジが左側にシフトした場合の誤り確率と右側にシフトした場合の誤り確率をそれぞれ求め、いずれかが等しくなるように記録条件を調整する技術が開示されている。このため、所定の再生信号、この再生信号の信号波形パターンに対応した第1のパターン、およびこの第1のパターン以外であって再生信号の信号波形パターンに対応した任意のパターン(第2または第3のパターン)が用いられる。まず、再生信号と第1のパターンとの間の距離Eoと、再生信号と任意のパターンとの間の距離Eeとの間の距離差D=Ee−Eoが求められる。次に、複数の再生信号のサンプルについて距離差Dの分布が求められる。次に、求めた距離差Dの平均Mと求めた距離差Dの分布の標準偏差σとの比に基づいて、再生信号の品質評価パラメータ(M/σ)が定められる。そして、品質評価パラメータで表される評価指標値(Mgn)から、再生信号の品質が判断される。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開2003−141823号公報
【特許文献2】特開2005−346897号公報
【特許文献3】特開2005−196964号公報
【特許文献4】特開2004−253114号公報
【特許文献5】特開2003−151219号公報
【非特許文献】
【0018】
【非特許文献1】電子情報通信学会論文誌C Vol. J90−C,pp.519 (2007)
【非特許文献2】Jpn. J. Appl. Phys. Vol.43, pp.4850 (2004)
【発明の概要】
【発明が解決しようとする課題】
【0019】
特許文献1に記載されている最も確からしい状態遷移列と2番目に確からしい状態遷移列,および特許文献3に記載されている正パターンと誤パターンはそれぞれ再生信号との距離を測定するべき目標ビット列という意味で同じものである。特許文献2および特許文献5では目標ビット列が3つあるが、同じ意味のものである。以下,これらを総称して評ビット列と呼ぶことにする。また、本発明ではBDシステムを基本として,30GB以上の大容量化を図ることを目指しているため,以下,変調符号の最短ラン長2Tを前提として説明を進める。
【0020】
非特許文献1に記載されているように,高密度記録を実現するためには,拘束長が5以上のPRML方式が適する。前述のように、BDの光学系条件(波長405nm,対物レンズ開口数0.85)では線方向に記録密度を高めた場合,容量が約31GB以上で2T繰り返し信号の振幅がゼロになる。このとき,PRML方式としては2T繰り返し信号の目標振幅がゼロのPR(1,2,2,2,1)方式等が適することは周知のことである。PR(1,2,2,2,1)方式に対応した再生信号の品質の評価方法としては、特許文献3と特許文献4に開示されたSbERがある。SbERは2値化ビット列(正パターン)の他に2番目に確からしい評価ビット列(誤パターン)として、正パターンとのハミング距離が1(エッジシフト)、ハミング距離が2(2Tデータのシフト)、ハミング距離が3(2T-2Tデータのシフト)を用いて、それぞれの分布をガウス分布と見なして、その平均値と標準偏差から誤差関数を用いてビットエラー率を推定するものである。
【0021】
BD規格を基本として記録容量が30GB以上の光ディスクシステムを実現するために必要な高精度の記録条件の調整技術に求められる性能について説明する。これには、少なくとも調整結果に基づいて記録したデータの品質について、(1)SbER等やビットエラー率等が十分に小さいこと、および(2)1台のドライブ装置で記録したデータの品質は他のドライブ装置においても、SbER等やビットエラー率等が十分に小さいこと、が求められる。要求性能(1)は当然の事柄であるが、要求性能(2)はディスク媒体が交換可能である光ディスク・システムにおいて特徴的に求められるものである。少なくとも2つの要求性能を満足しない記録条件の調整方法は、高密度光ディスクシステムには適さないと言える。
【0022】
以上の2つの要求性能の観点から、従来技術とそれらの組み合わせから類推される技術の課題について説明する。
【0023】
先ず、BDにおいて、線記録密度を高めた実験とシミュレーション結果を用いて、30GB/面相当以上の記録密度で記録再生を実施した場合に発生する種々の事象について説明する。
【0024】
図2は,試作した3層構成の追記型光ディスク試料を用いて測定した記録パワーとビットエラー数の関係をまとめた実験結果である。試作ディスクに用いた記録材料はGe系化合物薄膜であり、各層の層間隔を14μmおよび18μmとして3層構成として、光ヘッドから見て最も奥側の層までの透明カバー層の厚さを100μmとした。トラックピッチは320nmである。記録再生条件はデータ転送速度がBDの2倍速となる条件とし、検出窓幅1Tを約56nmとして、33GB相当の記録密度となるようにした。記録パルスとしては3つのパワーレベル(ピークパワー、アシストパワー、ボトムパワー)の間で変調した一般的なマルチパルス型の記録パルスを用いた。再生信号処理系の構成としては、8ビットのA/D変換器、21タップの自動等化器、PR(1,2,2,2,1)方式のビタビデコーダを用いた。ビットエラー率の最小値は各層共に10-5以下であった。ビットエラー率が最小となるピークパワー値はL0,L1,L2層で各々、13.5mW、15.5mW、11.5mWであった。図はL0層において、3つのパワーの比率を一定にして記録パワーを変化させたときのビットエラーについてまとめたものであり、エッジシフトの他に1個から4個の連続する2Tがまとめてシフト(スリップ)するケースについて調べた結果である。図に見られるように、記録パワーのずれに応じてエッジシフトだけでなく連続する2Tがまとめてシフトする場合のエラー頻度も同等以上に大きいことが分かる。これは、2T-2T信号の振幅がゼロであることと、PR(1,2,2,2,1)方式の場合、エッジシフトに対するユークリッド距離が14であるのに対して、連続する2Tがまとめてシフトする場合のユークリッド距離が12と小さいことに起因した結果である。
【0025】
図3はSNRとSbERの関係をまとめたシミュレーション結果である。ここでは、線形回折シミュレータによって記録マークを再生した時に得られるインパルス・レスポンスを求め、記録ビット列との畳み込み演算によって、理想的に記録が実施された場合の再生信号を算出した。ノイズはホワイトノイズとして加算し、SNRは8T繰り返し信号の半値振幅とノイズの標準偏差の比として定めた。これをPR(1,2,2,2,1)方式による再生信号処理系で処理することによって、ビットエラー率およびSbER等を算出した。特許文献3には2Tの連続数が2までの場合の評価パターンが開示されており、ここでは、これを2Tの連続数を6まで拡張(ハミング距離1〜7)して用いた。評価パターンの数はハミング距離当たり18であるので、その総数は252である。図に見られるように、2Tの連続数2(ハミング距離3)以上で、SbERの値がほぼ一定となることが判る。この結果は図2の実験結果に矛盾するようであるがそうではない。SbERの算出においては定義上、評価パターンの存在確率を加味してビットエラー率を推定するため2Tの連続数が2までの評価であっても、全体のビットエラー率を推定できるのである。
【0026】
図4にビットエラー率とSbERの関係を表す実験結果である。ここではL0層において、クロストークの影響を含むように連続5トラックの記録を行ない中心のトラックにて,種々の記録再生ストレスを与えて実験を行なった。具体的なストレスはディスクのラジアルチルト(R−tilt),タンジェンシャルチルト(T−tilt),フォーカスずれ(AF),光ヘッドのビームエキスパンダの操作による球面収差(SA),および記録パワーの変化(Pw)である。ラジアルチルトに関してはL2層の結果も示してある。図に見られるように,ビットエラー率とSbERの相関は非常に良好でありことが判る。ビットエラー率が10―5付近において,バラツキが大きい原因は主に試作媒体の欠陥の影響である。
【0027】
これらの実験とシミュレーションの結果から、33GB/面の記録容量を実現するような高密度記録再生条件においては、ビットエラーとして、エッジシフト(ハミング距離1)だけでなく、少なくとも2Tの連続数2(ハミング距離3)までのエラーの評価をする必があることが判る。特に、エッジシフトだけに注目して再生信号の品質を評価する方法では、ビットエラー率やSbERとの相関が十分とは言えない。
【0028】
次に高密度化に伴うユークリッド距離差の分布について説明する。ここで扱うユークリッド距離差とは、再生信号と誤目標信号とのユークリッド距離から再生信号と正目標信号とのユークリッド距離を減算した値であって、特許文献1では|Pa−Pb|、特許文献3および4ではD値として定義されたものである。また、ここでは理想的な記録状態を考察するために、前述のシミュレーションを用いた。SNRを24dBとし、記録密度を25から36GB/面相当の範囲(T=74.5nm〜51.7nm)で変化させて、2Tの連続数が2までのユークリッド距離差の分布を求めた。再生信号処理系の構成は前述の通りである。結果を図5に示す。この分布はSAM分布と呼ばれることもある。前述のように、PR(1,2,2,2,1)方式においては、エッジシフトの理想ユークリッド距離=14、2Tシフトおよび2個連続2Tがシフトする場合の理想ユークリッド距離=12、と異なるので、これらをまとめて表示するために、各ユークリッド距離差は理想ユークリッド距離で割って規格化して表示してある。同図において、距離差がゼロ(左側の端)または負になる場合の統計的な確率がビットエラー率に相当するものである。図に見られるように、記録密度の向上によって同じSNRであっても分布の広がりが大きくなることが判る。これは、記録密度を向上に対応して、エラー率が増加することを示すものであって、リーズナブルな結果となっている。一方、各分布の平均値(ピーク値と概略等しい)について注目すると、エッジシフトの場合には1(=理想ユークリッド距離)の近傍で一定となっている。しかしながら、連続する2Tがシフトする場合においては、2Tの連続数が1個、2個と増加するのに従って、かつ記録密度が向上するのに従って、ピーク値が、ゼロに近づく方向へと移動していくことが判る。この現象の理由は、自動等化器の処理能力に依存したものと考えることができる。前述のように、自動等化器は再生信号と正目標信号のRMS誤差を最小にするように動作するものである。一方、そのサンプリング間隔は1Tで有限な値であるため、サンプリング定理によって、サンプリング周波数の1/2までの範囲での離散的な周波数特性演算ができるだけである。このように、自動等化器で得られるフィルター特性には限りがあるため、再生信号の中に含まれる2Tの連続数が大きなパターン区間では再生信号の高域の周波数成分が大きくなり、結果として自動等化器の処理能力の限界に近づくため、理想ユークリッド距離からのずれが大きくなるものと考えることができる。後述するように、記録密度の向上によってユークリッド距離差の分布ピーク値(または平均値)が理想ユークリッド距離よりも小さい側へシフトする現象は、記録条件の調整技術に関して非常に重要な事柄である。上に示した公知文献の中にはこの現象に関する記載はないことを付記しておく。
【0029】
以上の実験とシミュレーションの結果に基づいて、前述の2つの要求性能の観点から、従来技術とそれらの組み合わせから類推される技術の課題についてまとめる。
(1)非特許文献2に記載の方法
非特許文献2では、特許文献1に記載の技術に基づいて、エッジシフトに注目して、ユークリッド距離差の分布の平均値が、理想ユークリッド距離となるように調整する技術が記載されている。「非特許文献2の式(1)」では、特定のエッジのシフト量MDは以下として定義される。
【0030】
【数1】

【0031】
ここで、Xは再生信号のレベル、PAおよびPBはそれぞれ2値化されたビット列(最も確からしい状態遷移列)に対する目標信号レベルおよび1ビットエッジシフトしたビット列(2番目に確からしい状態遷移列)に対応する目標信号レベルであり、dminはエッジシフトに対応する理想ユークリッド距離である。図5に示した結果に従って補足すると、本方法はエッジシフトの分布が理想ユークリッド距離(=1)になるように、記録条件を調整することに対応する方法である。一方、図3では高密度記録条件下においてエッジシフトだけに注目した場合、SbER(またはビットエラー率)との相関が十分でないことを示した。この結果から、エッジシフトだけに注目する本方法は、高密度記録条件では、上の要求性能(1)に照らして十分ではないことが判る。また、「非特許文献2のTable 2」では2Tが2個連続する箇所、すなわち、先行スペースが2Tの場合の2Tマークの前エッジ(Tsfp(2s、2m))、および後続するスペースが2Tの場合の2Tマークの後エッジ(Telp(2s,2m))において、調整指標が存在しないことが示されており、この点に関しても、図2に示した結果に鑑みて、2Tのエラーが大きい高密度記録条件の場合に本方法を適応するには十分でないと言える。
(2)特許文献2に記載の方法
特許文献2に記載の方法も、エッジシフトだけに注目して記録調整の指標を得る方法であるが、仮想的な1Tマークやスペースを導入することによって、2Tが2個連続する箇所についても、記録調整が可能である。しかしながら、上と同様に、エッジシフトのみに注目することから、SbER(またはビットエラー率)との相関が良好とは言えないため、本方法も要求性能(1)に照らして十分ではないことが判る。
(3)特許文献5に記載の方法
特許文献5に記載の方法は、誤ビット列についてもラン長制限を満たすように選択しているため、エッジシフトだけでなく2Tが連続してシフトするケースについても、指標とSbER(またはビットエラー率)との相関に優れた方法である。本方法では「特許文献5の図3」に示されるように、2Tマークを含む記録条件を調整するために、注目するマークエッジが左側にシフトする場合と右側にシフトする場合とで、評価する誤ビット列と正ビット列とのハミング距離が異なる。例えば、非特許文献2の表記に従って、Tsfp(3s、2m)について見てみると、記載されるビット列は以下である。
【0032】
【表1】
【0033】
PR(1,2,2,2,1)方式について考えると、左シフトビット列の場合は、正ビット列とのハミング距離が1、ユークリッド距離が14である。右シフトビット列の場合は、正ビット列とのハミング距離が2、ユークリッド距離が12となる。図5に示した結果に見られるように、ハミング距離が異なると、それぞれの分布の平均と標準偏差の値が異なってしまう。特許文献5では、この課題に対応するため、SbERの概念を導入し、それぞれのエラー確率を誤差関数を用いて推定し、両者のエラー確率が等しくなる条件を調整目標としている。本方法に従えば、SbER(またはビットエラー率)を最小とするような記録条件を定めることが可能であると考えられる。一方、前述のように図5に示したシミュレーション結果は、記録マークが理想的な状態(エッジシフト=0)で形成された場合の結果である。図5に見られるように、ハミング距離の違いに応じて、中心値と標準偏差が異なっている。したがって、特許文献5に記載の方法に従えば、3つの分布のエラー確率(ユークリッド距離差が0以下になる確率)を等しくするように、記録マークの形成条件をずらす必要がある。前述のディスク互換性の保証に関する要求性能(2)に照らして、この方法が高密度光ディスクの記録条件の調整方法として理想的なものであるかどうかについては疑問が残る。この点について、定量的な考察をするために、前述のシミュレーションを用いて検討を行った。
【0034】
特許文献5の方法によって検出されるエッジシフト量を定義するため、概念の拡張を行った。「特許文献5の式(13)」によって、エッジシフト相当量Ecは、
【0035】
【数2】
【0036】
と定義される。ここで、M2,M3およびσ2、σ3はそれぞれ、注目するエッジが左右に1ビットシフトした場合のユークリッド距離差の分布の平均および標準偏差である。前述のように2つの分布を理想ユークリッド距離で規格化して図5の結果を得た。同様にして理想ユークリッド距離が1Tに相当すると考え、M2,M3およびσ2、σ3をそれぞれ理想ユークリッド距離で規格化して用いれば、エッジシフト相当量Ecから時間軸方向のエッジシフトEc’を算出することができる。
【0037】
図6はシミュレーションで求めた分布を示しており、「特許文献5の図6」に摸式的に示されるものと同様な結果が得られていることが判る。SNRを変化させた場合の、Ec’の値について調べた結果を図7に示す。図に見られるように、SNRの変化に応じてEc’の値が大きく変化することが判る。光ディスク装置では、個体ごとに、あるいは温度等の環境条件に応じて、光スポットの形状や光電変換アンプのSNRが変化する。ハードディスク装置のように、ディスク媒体が交換できないストレージ・デバイスであれば、当該ドライブ装置においてSbER(またはビットエラー率)が最小になるように、記録条件を調整することが最良の方法である。しかしながら、光ディスクのように、媒体可換なストレージ・システムにおいて、当該ドライブのみのSbER(またはビットエラー率)が最小となるだけでは、不十分であると言える。前述の要求性能(2)に鑑みて、本方法が高密度記録条件下での記録条件の調整方法として改善の余地があると言える。
【0038】
さらに、本方法に関して、要求性能(1)に照らして改善の余地があることについても説明する。Tsfp(3s、2m)の評価に用いるビット列は前述のとおりである。一方、特許文献4に記載されているとおり、次の評価ビット列もSbERの算出に用いられる。
【0039】
【表2】
【0040】
これは、注目する2Tマークに後続するスペースが2Tの場合である。左シフトビット列に関しては、前述と同様に正ビット列とのハミング距離1、ユークリッド距離14である。一方、右シフトビット列の場合は、正ビット列とのハミング距離3、ユークリッド距離12となっており、前述のものとハミング距離が異なる。要求性能(1)によって、記録調整用の評価指標と再生信号品質の評価指標SbER(またはビットエラー率)との相関が十分に大きいことが望まれる。したがって、記録調整用の評価指標においても、評価ビット列が再生信号品質の評価指標に準じたものとなる必要がある。注目するエッジが左右にエッジシフトした目標信号を用いる評価指標において、この例のように、左シフトがハミング距離1、右シフトがハミング距離2、3と複数の組み合わせが生じる点に関して、特許文献5には解決手段に関する記載がなかった。この点に関しても、本方法には改善の余地があると言える。
(4)従来技術の組み合わせによる方法
非特許文献2では、特許文献1に記載の技術に基づいて、エッジシフトに注目して、ユークリッド距離差の分布の平均値が、理想ユークリッド距離となるように調整する技術が記載されている。これを「特許文献5の図3」に示される評価ビット列に適応して、各分布の平均値が理想ユークリッド距離となるように調整する方法が容易に類推される。しかしながら、図5に示したように、記録密度を高めると各分布の平均値が理想ユークリッド距離から小さくなる方向にずれてしまう。同様にSNRに応じても各分布の平均値は変化する。図8この現象を実験的に確かめた結果を示すものである。これは、前述の試作3層ディスクのL0において、再生パワーを変化させながら再生実験を実施して得た実験結果である。図の横軸は再生パワー1.2mWを100%として表したものである。再生信号振幅は再生パワーに比例するが光検出器のノイズ(アンプノイズ)は一定であるため、本実験は、再生パワーを変化させることによって再生信号のSNRを変化させた結果である。図に見られるように、各分布の平均値は理想ユークリッド距離(=1)よりも小さく、かつ再生パワーが小さくなるのに応じて小さくなることが判る。この方法についても、ドライブ装置の状態によるSNRの違いが、記録調整に用いる指標に影響してしまうことは明らかである。
(5)SbERを最小とする方法
図4に示したように、33GB/面の実験においてSbERはビットエラー率と良好な相関を示す。したがって、記録調整のための評価指標を用いずに、記録条件の全ての組み合わせに対して、記録再生を行い最小のSbERが得られる条件を選択する方法が考えられる。しかしながら、光ディスク媒体のように、記録調整用の領域(試し書きエリア)の大きさが限られている場合、無作為に記録条件を変化させながら、SbERが最小になる条件を検索することは実質的に不可能である。なぜなら、記録するマークのエッジを理想
的な状態に近づけるための方向に対する情報を得ることができないためである。上に示した従来の技術のように、記録パルスの各パラメータに応じて、それぞれ独立に目標値からのずれを定量化できる方法でなければ、光ディスク装置に応用して試し書きを実施可能な方法とはならない。また、ディスクの試作を繰り返しながら、その性能向上を図るような場合においても、短時間で記録条件の調整が完了することが望まれる。この意味においても、前述の要求性能(1)と(2)を満たし、かつ記録パラメータに応じてそれぞれ独立に調整が可能となる新規な記録調整のための指標とその調整方法が望まれていた。
【0041】
次に,従来のBDの記録ストラテジを用いて,記録容量が30GB以上の高密度光ディスクにおいて良好な記録品質を得るための課題を記録パルスの観点から述べる。
【0042】
図44は,4Tマークに対応するパルス列のラストパルスの時間幅TLPを変化させながら光ディスク媒体にランダムデータを記録し,当該箇所の再生信号波形に基づいて4Tマークの後エッジのエッジシフトの値を測定した結果である。ここで,記録ストラテジとして従来のBDのN−1記録ストラテジを用い,TLPの調整単位をチャネルビット周期の1/16とした。TLPに関しては,後続スペース長による分類は行わず,全ての4Tマーク記録パルスに対して一律の値を指定した。また,エッジシフトとして,特許文献2に開示されたV−SEATのエッジシフトを用いた。本実験の条件は,前述の試作ディスクを用いた実験における条件と同様である。
【0043】
図44によると,従来のBDの記録ストラテジを用いた場合,ラストパルス終了位置を1単位(チャネルビット周期の1/16)変化させるとエッジシフトは約16ポイント変化する。良好な記録品質を得るためにはエッジシフトの値が±5%以内であることが望ましいが,従来のBDの記録ストラテジを用いた場合のエッジシフト変化率では,エッジシフトの値を常に±5%以内に収めることは困難である。
【0044】
従来のBDの記録パルス波形を用いた場合に記録マークの後エッジのエッジシフト変化率が大きくなるのは,記録マークの後エッジの形成に関するパラメータとして,ラストパルスの時間幅TLPだけしかないため,ラストパルスの終了位置を変化させると,ラストパルスの時間幅も変化するからである。すなわち,ラストパルスの時間幅が変化することにより記録マークの後エッジ形成部に注入される熱エネルギーが大きく変化するため,エッジシフトの変化率が大きくなると考えられる。
【0045】
記録容量が30GB以上の高密度光ディスクでは,ディスクに記録されるデータのビット長が従来のBDより小さくなるため,前後マークを記録するときの熱の影響をより受けやすくなる。このため,高密度光ディスクに用いる記録パルスには,従来のBDより高精度に記録マークのエッジ位置を制御できることが求められる。
【0046】
この課題に対して,記録パルスの調整単位をチャネルビット周期の1/16より小さい単位,例えばチャネルビット周期の1/32にすることも考えられるが,その場合,ディスクのコントロール情報領域に格納すべきパルスパラメータのデータ量が増加してしまうため,記録パルスの調整単位はチャネルビット周期の1/16のままで,記録マークの後エッジ位置を高精度に制御できることが望ましい。
【0047】
以上のように,BDシステムに基づいて容量が30GB/面以上となるような高密度記録条件に対応する記録条件の調整に関して、従来の技術では調整性能と媒体互換性の保証の両立という点に関して十分とは言えないという課題があった。本発明で解決しようとする課題は,これらの課題を解決する新規な記録調整用の評価指標と方法を提供すること、およびそれを用いた光ディスク装置の提供である。また,記録パルス調整単位がチャネルビット周期の1/16である条件においても,マークのエッジ位置を高精度に制御できる記録方法の提供である。
【課題を解決するための手段】
【0048】
本発明ではBDシステムを基本として,30GB以上の大容量化を図ることを目指しているため,以下,変調符号の最短ラン長は2Tを前提として説明を進める。また、前述のように、実験結果から2Tの連続数が2までを扱うSbERは良好にビットエラー率と一致するため、再生信号品質の評価の指標としてSbERを前提として,本発明による記録調整用の評価指標について説明する。SbERと同様に,目標信号と再生信号のユークリッド距離に基づいて統計的に再生信号品質を評価する指標や,ビットエラー率を直接評価する指標等ならば,本発明によって記録条件を調整方法した結果は,良好な結果が得られる。
【0049】
前述の課題を整理すると以下のようになる。
(課題1)調整結果に基づいて記録したデータの再生互換性について
SNRの変化に依存せずに調整目標点が一定となる評価指標と調整方法である必要がある。
(課題2)調整結果に基づいて記録したデータの品質について
SbERが十分に小さいことを保証するためには、少なくとも連続する2Tの数が2個までの評価ビット列が、SbERの評価ビット列と一致、もしくは実質的に一致する必要がある。
(課題3)短時間での記録調整の実現に関して
記録パルスの条件,もしくは適応型記録パルスの各パラメータに対応して、それぞれ独立に評価可能な評価指標と調整方法である必要がある。
(課題4)マークの後エッジ位置制御の高精度化に関して
記録パルス調整単位がチャネルビット周期の1/16という条件下においても,マークの後エッジ位置を高精度に制御する必要がある。
【0050】
本発明の課題解決手段を構成する基本的な概念は,2つの目標信号と再生信号とのユークリッド距離の差に従う評価指標において,着目するエッジのシフトに対応する成分とSNRに依存する成分を分離して評価を行うことにある。本発明の理解を容易にするため,初めにこれらの課題を満足する評価指標の定義を示し、その後、課題を満足していることを示すことにする。
【0051】
以下、再生信号をW、再生信号から得られた2値化ビット列の目標信号をT、2値化ビット列の注目するエッジを1ビット左にシフトさせ、かつラン長制限を満たすビット列の目標信号をL、2値化ビット列の注目するエッジを1ビット右にシフトさせ、かつラン長制限を満たすビット列の目標信号をRとする。W,T,R,L間のユークリッド距離をED(W,T)、ED(W,R)のように表すことにする。注目するエッジが左方向にシフトする誤りについての評価値をxL、右方向にシフトする誤りについての評価値をxRとして、これら等価エッジシフトと呼び以下で定義する。
【0052】
【数3】
【0053】
【数4】
【0054】
注目するエッジのエッジシフト量を拡張エッジシフトDと呼び、以下で定義する。
【0055】
【数5】
【0056】
注目するエッジのエラー確率に相当する補正量をSNRファクタSと呼び、以下で定義する。
【0057】
【数6】
【0058】
注目するエッジとマーク長と先行(もしくは後続)するスペース長が同じ、すなわち同いつの記録パルス条件にて記録されるエッジの集団について、記録調整に用いるエッジシフト量をDの統計平均値Δとして、以下で定義する。
【0059】
【数7】
【0060】
ただし、Nは測定したエッジの総数、Dnはn番目のエッジの拡張エッジシフトである。
【0061】
さらに、注目するエッジのエラー確率に相当するジッタ値をσとして、以下で定義する。
【0062】
【数8】
【0063】
ただし、Snはn番目のエッジのSNRファクタである。
【0064】
(式D1)から(式D6)によって定義される本発明の評価指標を以下,L−SEAT(run-length-Limited Sequence Error for Adaptive Target)と呼び,(式D5)に定義したΔをL−SEATシフト,(式D6)に定義したσをL−SEATジッタと呼ぶ。本発明の記録条件の調整方法は,記録パルスの条件を変化させながら記録再生を行い、対応するエッジに関してL−SEATシフトの絶対値およびL−SEATジッタの値が最小となるような記録パルスの条件を選択することである。
【0065】
以下、本発明の記録条件の調整方法が前述の(課題1)から(課題3)を満足することを説明する。特許文献1から5にあるように,PRML方式においてエラーマージンは,ユークリッド距離差で表される。以下,説明の簡略のために,注目するエッジが左右にシフトするエラーに関するユークリッド距離差を理想ユークリッド距離で規格化した値とそれぞれ、dEDL、dEDRを以下のように定義しておく。
【0066】
【数9】
【0067】
【数10】
【0068】
(課題1)調整結果に基づいて記録したデータの再生互換性について
前述のように,記録調整用の評価指標ではSNRの変化に依存せずにエッジシフトの評価指標が一定である必要がある。各ユークリッド距離差の分布はSNRに応じて平均値が変化する。W,T,L,Rは複数の時刻t(t=t0+1,t0+2,t0+3,t0+4,t0+5)に対する信号レベルであるので、これを多次元空間の座標として考えてみる。簡単のため、ハミング距離1の右シフト誤りついて考えると、PR(1,2,2,2,1)方式では、T(T1,T2,T3,T4,T5)、W(T1+δ1,T2+δ2,T3+δ3,T4+δ4,T5+δ5)、R(T1+1,T2+2,T3+2,T4+2,T5+1)とすることができる。さらに、この5次元空間の原点をTとする座標系を考えると、W,Rの位置ベクトル(=座標)を改めてW,Rとすると、W(δ1,δ2,δ3,δ4,δ5)、R(1,2,2,2,1)となる。T,L,Rを含む平面におけるこれらの関係を摸式的に図9に示す。図においてx軸は線分TRの方向に取っており、点Rが1となるように規格化している。また、y軸はx軸に直行する方向としているため、Wの値によってy軸は変化するものであって一定の方向を示すものではないことに注意されたい。W,T,Rに関するユークリッド距離には以下の関係がある。
【0069】
【数11】
【0070】
すなわち、TからWへのユークリッド距離とRからWへのユークリッド距離の合計は、TからRへのユークリッド距離に必ずしも一致しない。
【0071】
図9では物理的に記録されたマークのエッジシフトの測定についても摸式的に示している。この場合目標値T(原点)から測定した記録マークのエッジまでの距離をxとしたとき、1Tだけ右にシフトした目標値Rから記録マークのエッジまでの距離は(1−x)となり、両者の合計は必ず1(=1T、Tは検出窓幅)となる。記録パルスによるエッジ制御は一般的に時間方向へのシフト制御であって、こうした物理的に記録されたマークのエッジシフトに関する線形な測定の概念に沿ったものとなっている。
【0072】
そこで、PRMLにおけるユークリッド距離(線分の長さの2乗値)の定義においても、ベクトルTWのx軸上への写像成分をxRとすれば、ベクトルRWのx軸上への写像成分は(1−xR)となって、両者の和を1とすることができる。xRはベクトルTRとベクトルTWの内積値として、T,R,W間のユークリッド距離を用いて、以下のように算出することができる。
【0073】
【数12】
【0074】
これが(式D2)に定義した等価エッジシフトxRの意味である。等価エッジシフトの算出はハミング距離が2や3の場合にも同様にして算出することができる。(式6)の第2項は、図5に示したユークリッド距離差を理想ユークリッド距離で規格化したものである。xRはWのTR方向への成分値であると同時にPRMLのエラー確率に関する項を含んでいるものである。自然な拡張によって,左側にシフトした目標Lを用いて(式D1)により等価エッジシフトxLを算出することができる。
【0075】
一方、SNRの値に応じてWの座標が変化するため、等価エッジシフトの値は測定するエッジごとに変化する。しかしながら、前述のように等価エッジシフトはTR線分上で線形加算が成り立つため、その平均値を求めることで、SNRに依存せずに記録マークのエッジシフトを評価することが可能となる。
【0076】
次に、SNRに応じてユークリッド距離差の平均値が変化する課題への対応方法を示す。前述のように、この現象の要因は自動等化器によって得られるフィルターの周波数特性がサンプリング定理によって制限されることによって発生するものと考えられる。従って、注目するエッジに対して、それが左右にシフトした場合に現れる平均値の変化は等しい。図5に示したように、分布の平均値の変化は連続する2Tの数、すなわちハミング距離ごとに分類できることからも推察される。規格化したユークリッド距離差dEDL、dEDRの平均値をそれぞれML、MR、これらの理想ユークリッド距離からのずれをdM、測定すべきエッジシフト量をΔ2とすればとすれば、以下の関係が成立する。
【0077】
【数13】
【0078】
【数14】
【0079】
一方、特許文献2で開示されたV−SEATではエッジシフト(ハミング距離1)だけに着目して規格化シーケンス誤差を算出し、左右シフトに対応した符号を付与して加算平均をする技術を開示している。例えば、右方向の等価エッジシフトを正とし、左方向の透過エッジシフトを負とすることが自然である。これを応用し、注目するエッジについて、左右の等価エッジシフトを算出し、シフト方向に対応した符号を加味して加算平均したものを評価値とすれば、SNRに依存したユークリッド距離差の分布の平均値の変化dMを相殺することができる。
【0080】
【数15】
【0081】
同様にして、注目する1つのエッジに関する測定値として、(式D3)で定義される拡張エッジシフトDについても、これがSNRに依存した影響を取り除いたエッジシフトの評価値であることが判る。(式D5)で定義されるL−SEATエッジシフトΔは、(式9)で定義されるそれぞれの分布の平均値の差Δ2と統計的に等価である。
【0082】
図10はL,Rを目標信号として等価エッジシフトxL,xRを示した摸式図である。図ではLとRの1時刻分のずれを考慮して、t(t=t0,t0+1,t0+2,t0+3,t0+4,t0+5)の6次元に対するL,R、Wの座標をTを原点として表している。物理的に記録されたマークのエッジシフトxは、1T右側の点Rからの距離(=1−x)、と1T左側の点Lからの距離(=1+x)を用いて、x={(1−x)+(1+x)}/2で求められる。(式9)は、これと計量を意味している。一方、W,T,L,R間のユークリッド距離に関しては、L,Rに時刻ずれがあることから、線分TRと線分TLは幾何的な直線上には乗らない。両者のなす角度θは2つのベクトルの内積を用いて求められ、図のように両者がエッジシフト(ハミング距離1)のエラーである場合、cosθは以下となる。
【0083】
【数16】
【0084】
ここで、vector(T,L)、vector(T,R)はそれぞれ、L,Rの位置ベクトル、”・”演算子は内積を表している。Tが最も確からしい目標信号であり、LとTがそれぞれ2番目に確からしい(最もエラー確率の高い)目標信号であるならば、PRML方式におけるエラー率の観点から、拡張エッジシフトDをゼロにするように記録条件を調整することがリーズナブルであると言える。2つの目標信号が幾何的な直線上には乗らないことは、PRML方式におけるエッジシフト測定の特徴であるとも言える。2Tの繰り返し数が2(ハミング距離1,2,3)について、L,Rとcosθの関係を図11にまとめる。図において、Lのハミング距離が1でRのハミング距離が3の場合、cosθ>0となって、幾何的にはLとRのなす角が90度未満となるが、LとRとして最もエラー確率の高い目標信号を選択するならば、拡張エッジシフトDの平均値Δまたは、L、R分布の平均値の差分Δ2によって注目するエッジのシフトを測定できる。
【0085】
図12はdEDLとdEDRの関係を示すシミュレーション結果である。シミュレーション条件は前述の通りで、33GB/面に相当する記録密度で所定の長さの記録マークが理想的に記録された場合についての結果である。ここではSNRを20dBとした。図では記録マークの前エッジについて(a)Tsfp(2s、2m),(b)Tsfp(2s、3m),(c)Tsfp(3s、2m),および(d)Tsfp(3s、3m)の4つの場合について各1000エッジの結果を示している。ここでは、LとRの目標信号として、ハミング距離がそれぞれ(a)(2、2)、(b)(2,1)と(3,1)、(c)(1,2)と(1,3)、および(d)(1,1)となるものを用いた。図中の破線はdEDL+dEDR=2、すなわち図10に示した物理的な記録マークに関する計測値の保存関係と等価な関係を示している。図に見られるように、各プロット点は概ね破線に沿った相関関係を示しており、ノイズの影響による再生信号の変動が、概ね左シフトと右シフトに関して対称であることが判る。詳しく見ると図12(b)、(c)に見られるように、左右の目標信号のハミング距離が等しくない場合は、破線とは少し異なる傾きをもった分布であることが判る。これは、PRML方式によるエラー発生の確率が左右のシフトで異なることに対応したものであって、物理的な記録マークに関する計測と、PRML方式のエラーマージンに沿った計測の差異である。特許文献2で開示されたV−SEATによるエッジシフトの評価は、目標信号としてハミング距離1のものだけを利用しているので、図12(b)、(c)の場合にも破線に沿った関係の計測のみしか実施できない。従って、本発明は従来技術に比べて、左右のエッジシフトに応じたエラー率の相違をより精度良く検出することが可能となる。これが、本発明による第1の効果である。
【0086】
図13はdEDLとdEDRの平均値と拡張エッジシフトDの関係を示すシミュレーション結果である。シミュレーション条件は図12と同一である。ここでも、(a)Tsfp(2s、2m),(b)Tsfp(2s、3m),(c)Tsfp(3s、2m),および(d)Tsfp(3s、3m)の4つの場合について各1000エッジの結果を示している。図中、dEDLとdEDRの平均値の分布が(1)エッジパターンごとに広がりが大きく異なる点、および(2)理想ユークリッド距離差=1よりも小さい側にシフトしている点は図5の結果を反映したものである。これとは対照的に、拡張エッジシフトDの分布はエッジパターンに依らず、(1)分布の広がりがほぼ均一であり、かつ(2)分布の中心がほぼゼロにある。図中では、これらの違いを摸式的な分布形状で表している。拡張エッジシフトDの導入によって得られるこの2つの効果は、それぞれ(1)等価エッジシフトによって再生信号のシフトをベクトルTRまたはベクトルTLとの内積値として算出して線形化している点、および(2)左右の等価エッジシフトを符号を付加して平均化している点、による効果である。
【0087】
以上、本発明による効果をまとめたものを図14に示す。同図は図7に示したEc’(特許文献5の方法)とSNRの関係に、(式D5)に定義した拡張エッジシフトの平均値Δを加えたものである。光ディスク装置は可搬媒体を扱う装置であるため、不特定多数の媒体に対して同様な記録条件で記録を行える必要がある。しかしながら、実際に記録される情報のSNRは、光ディスク装置の動作環境や機械のコンディションによって変動する。従来の方法の場合、図14に見られるように、Ec’値がSNRの変化に応じて大きく変化しており、これは、理想的な記録信号と、実際に記録媒体に記録される記録信号との差(図14では、エッジシフト量を指標として評価している)が、光ディスク装置の動作コンディション(SNR)に応じて変動することを意味する。一方、本発明のΔ値はSNRの変化に依存せずにほぼゼロで一定であり、これは、光ディスクの動作コンディションが変動しても、同じ条件で記録ができていることを意味する。前述のように、本シミュレーションでは、所定の長さの記録マークが理想的に記録された場合の信号にランダム雑音を加えたものであり、この条件に対して、エッジシフトの評価値Δがほぼゼロであるという計測結果は、記録したデータの再生互換性の観点からも非常に優れたものである。この点が,本発明による第2の効果である。
【0088】
(課題2)調整結果に基づいて記録したデータの品質について
本発明による記録条件の調整の結果、SbERが十分に小さい必要がある。これを実現するためには、記録パルスの調整によってdEDLとdEDRが最小になり,かつT、L、Rの評価ビット列とSbERの評価ビット列が実質的に等価である必要がある。
【0089】
最初に前者に対して説明する。目標信号T,L,Rはハミング距離の差異と時刻ずれによって,幾何的な直線上に乗らないことは前述のとおりである。これによって,等価エッジシフトの絶対値は左右のシフトに対して異なる。この点は本発明によるエッジシフト計測の特徴である。さて,N個のエッジを評価したとき,n番目のエッジのdEDLとdEDRの値をdEDLnとdEDRnとして,それらの平均を1と近時したとき,標準偏差σL,σRは次式で表される。
【0090】
【数17】
【0091】
【数18】
【0092】
ビットエラー率はこれらの合成標準偏差σLRによって評価される。従って,
【0093】
【数19】
【0094】
となり,右辺が(式D6)に示したL−SEATジッタの2倍の値となる。ここに表れる係数2は本質的なものではなく,dEDLおよびdEDRの分布においてエラーマージンが1(理想ユークリッド距離=1)であるのに対して,L−SEATでは従来のタイム・インターバル・アナライザによるジッタ測定と同様に,エラーマージンが±1/2Tであることによって生じた係数である。両者をガウス分布としたときの誤差関数によるエラー率の値は等しくなる。L−SEATジッタは,図5に示したユークリッド距離差の分布をそれぞれ,平均値が1となるようにして重ね合わせた場合の合成標準偏差を表していることが判る。従って,L−SEATジッタはSbERやビットエラー率に対して良好な相関をもつ評価指標であると言える。さらに詳しく言うと,(式D4)に見られるように,SNRファクタは定義によって,SNRや記録密度によってユークリッド距離差の分布が理想値1からずれた量と同じ値を平均値としてもつ。従って,(式D6)に定義したL−SEATジッタにおけるSNRファクタの寄与は,ユークリッド距離差の分布の平均値のずれを加味したものとなっている。以上のように,本発明のL−SEATでは,注目するエッジのシフトに対応する成分(拡張エッジシフト)とSNRに依存する成分(SNRファクタ)を分離して評価を行うことができる。これによって,個別のドライブ装置のSNRに依存しない再生互換性能に優れたシフト調整と,SbERやビットエラー率の最小条件の保証という2つの機能を同時に提供することができるのである。すなわち、本発明のL−SEATは、特許文献2で開示されたV−SEATを含む従来の記録調整用の信号評価指標に比較して、ジッタやSbERなど、従来の再生信号品質の評価指標との相関性を有しており、信号評価指標として優れたものである。よって、本発明により、従来にない優れた信号評価指標が提供され、これが本発明によって得られる第3の効果である。この点に関する実験的な検証については,実験結果を交えて後述する。
【0095】
次に,SbER等の再生信号の品質の評価を行うために用いる評価ビット列との親和性について説明する。特許文献1、3、4等に記載される再生信号の評価技術は,それぞれ構成が異なるが,共通技術として,PRMLデコーダから出力される2値化ビット列の中から最も確からしい第1の評価ビット列を検索・抽出する工程が含まれている。評価ビット列の長さMはPRML方式の拘束長Nと,評価ビット列に含まれる2Tパターンの連続数N2Tを用いて,M=2N−1+2N2Tと一般化することが可能である。ここでN2Tは0,1,2,...となる整数である。N2T=0,1,2は,前述の表記に従えば,それぞれエッジシフト,2Tシフト,2T玉突きシフトに対応するものである。また,N2Tが0,1,2,3,4,5および6のとき,ハミング距離はそれぞれ1,2,3,4,5,6および7であって,パターンAとパターンBの評価ビット列の間のハミング距離は(N2T+1)となる。評価ビット列は2Mとおりのビット列の中から,最も確からしい第1の評価ビット列と第1の評価ビット列の目標信号からのユークリッド距離が最小となる目標信号に対応する第2の評価ビット列との関係を抽出する機械的な操作によって,容易に列挙することができる。
【0096】
図15は,拘束長5のPR(1,2,2,2,1)方式に対応した評価ビット列の例であり,同様なものは特許文献4に記載されている。図に見られるように,拘束長5のPRML方式を用い,PRMLデコーダ2値化ビット列の中から評価ビット列を検索・抽出して再生信号の品質評価を実施する場合,ハミング距離ごとに18組で合計54組,すなわち108個の評価ビット列が列挙される。再生信号の評価を行う場合、これらの評価ビット列の検索・抽出処理を並行して実施する必要がある。
【0097】
図16は図15に示した拘束長5のPR(1,2,2,2,1)に対応した評価ビット列から共通項を抽出し整理したものである。図に見られるように,ハミング距離1,2,3に応じた108個の評価ビット列は,それぞれビット長5,7,9の主ビット列と,その両端に付加された2ビットの副ビット列XX,YYによって表現することができる。ここで,主ビット列は、ハミング距離1の場合,「00011」,「00111」,「11100」,および「11000」の4個,ハミング距離2の場合,「0001100」,「0011000」,「1110011」,および「1100111」の4個,ハミング距離3の場合,「000110011」,「001100111」,「111001100」,および「110011000」の4個であり,副ビット列AAは「00」,「10」,もしくは「11」であり,副ビット列BBは「00」,「01」,もしくは「11」である。ここに定義した主ビット列の区間が目標信号と再生信号のユークリッド距離の算出区間となる。副ビット列は主ビット列の端部での目標信号レベルを算出するためだけに必要なものであって、複数の目標信号の間のユークリッド距離には係わらないものである。その意味で、副ビット列は目標信号の端部のレベルを定めるための境界条件を定めるものと考えることができる。
【0098】
主ビット列はPRML方式の拘束長に依存せずに定まるものである。この理由を説明する。最短ラン長mが2Tの場合,エッジシフトによって1ビットが変化することを表現するためにビット列の最短長は最短ラン長を2倍して1を加えた値,すなわち2m+1=5ビットである。これが主ビット列の実体である。同様にして,評価ビット列に含まれる連続する2Tの数N2Tを用いて一般化すると,主ビット列の長さは(2m+1+2N2T)となる。このように,主ビット列とは,評価ビット列に含まれる連続する2Tの数に応じて定まる,最短のビット列という意味をもつ。一方,前述のように,再生信号とのユークリッド距離の算出に必要なビット列の長は,PRML方式の拘束長Nを用いて,(2N-1+2N2T)である。両者のビット列の長の差は(2N-1+2N2T)−(2m+1+2N2T)=2(Nm−1)となって,これが必ず偶数であることが判る。最短ラン長m=2の場合,この値は2(N−3)である。
【0099】
以上のように,PRML方式の拘束長Nに依存しない主ビット列と,主ビット列の両端に付加された長さ(N−3)の副ビット列を用いれば,評価ビット列を整理して表現することが可能である。
【0100】
このように,評価ビット列を整理して記述するとことで、再生信号品質の評価指標と本発明の関係の簡素化が可能になると共に、本発明においても回路規模の削減を図ることができるようになる。
【0101】
図16では特許文献4の記載内容に従って、評価ビット列をA、Bの組として記述した。再生信号を2値化して得られたビット列の中から第1の評価ビット列(目標信号Tに相当する評価ビット列)を検索し、これから2番目に確からしい第2の評価ビット列(目標信号LまたはRに相当する評価ビット列)を生成して用いる方が、回路規模の削減の点で有利である。第1と第2の評価ビット列のハミング距離は予め定められるので、ハミング距離と同じ数の”1”をもつビット列を生成ビット列として、排他的論理和(XOR)演算によって、第1の評価ビット列(T)からに施すことによって、第2の評価ビット列を生成できる。図17はハミング距離が1から7までに対応した主ビット列をまとめたものである。図中,主ビット列(Main bit array)の欄には,上に示した主ビット列を列挙してある。ここでは、主ビット列にハミング距離と1から4までの数の組み合わせの主ビット列番号を定めて整理した。図に示すように、第2の主ビット列を生成するための操作は、ハミング距離ごとに定まった生成ビット列をXOR演算して求めることができる。第2の主ビット列の主ビット列番号についても表記してある。
【0102】
以上のように,主ビット列に関して考察すればSbERを評価ビット列と本発明の方法による評価ビット列との親和性を説明することができる。
【0103】
まず,連続する2Tの数が2以下の場合について,本発明によるエッジ評価の主ビット列を列挙したテーブルを図18に示す。L−SEATでL,R目標を同時に生成する場合、主ビット列の長さは前述のものよりも1Tずつ長くなっており,ハミング距離1,2,3に対してそれぞれ6,7,8である。ここでは,図17と同様に,再生信号を2値化して得られるビット列に含まれる主ビット列と,これにXOR演算をしてそれぞれL,R用の主ビットを生成するための生成ビット列を列挙した。主ビット列の総数は12であり,各主ビット列の中で下線で示したビットが注目するエッジを表している。ここで採用した主ビット列とL,Rに関する選択ルールは,注目するエッジを左右に1ビットシフトされるとともに,ラン長制限を満たし,かつハミング距離が最小(ビット反転数が最小)となるような目標をL,Rとして選択するというものである。また,記録マークを“1”,スペースを“0”として記述した。記録マークからの反射光量がスペースに比較して小さい,所謂High To Low型の媒体の場合,PRクラスを(1,2,2,2,1)とするならば,記録マークを“0”,スペースを“1”とするように,主ビット列の“1”と“0”を反転すればよい。あるいは,PRクラスを(−1,−2,−2,−2,−1)として,インパルス応答の向きを反転すれば,図18をそのまま用いることができる。以下,本発明の説明では,特に指定しない限り記録マークを“1”,スペースを“0”として扱う。
【0104】
以下,N2Tの最大値が2の場合について,図17に示したSbER算出の主ビット列と図18に示したL−SEATの評価主ビット列の関係について説明する。図19はN2T=0,すなわちハミング距離が1の場合の両者の比較である。これは3T以上のマークの前エッジに関する評価である。SbERについては,評価する時刻tを,L−SEATについては,エッジの種別を付記してある。図に見られるように,主ビット列に含まれるエッジは1つである。SbERとL−SEAT共にエッジ当たり2つのハミング距離に対する評価を行っており,主ビット列は同一である。すなわち副ビット列を含む両者の評価ビット列は一致している。図では前エッジについてのみ示しているが,“1”と“0”を反転すれば後エッジとして扱うことができ,その場合にも評価ビット列の一致は自明である。
【0105】
図20はN2T=1,すなわちハミング距離が2の場合の両者の比較である。主ビット列に含まれるエッジは2つである。SbERとL−SEAT共にエッジ当たり2つのハミング距離に対する評価を行っており,主ビット列は同一である。時刻に対する評価の遷移を見ると,図中に破線矢印で示すように,SbERの場合L,L,R,Rの順に評価を行い,L−SEATはL,R,L,Rの順に評価を行うことが判る。主ビット列に含まれる“1”と“0”を反転したパターンについても同様に,評価ビット列は一致する。
【0106】
図21はN2T=2,すなわちハミング距離が3の場合の両者の比較である。主ビット列に含まれるエッジは3つである。上の例と同様に,SbERとL−SEAT共にエッジ当たり2つのハミング距離に対する評価を行っており,主ビット列は同一である。時刻に対する評価の遷移を見ると,図中に破線矢印で示すように,SbERの場合L,L,L,R,R,Rの順に評価を行い,L−SEATはL,R,L,R,L,Rの順に評価を行う。主ビット列に含まれる“1”と“0”を反転したパターンについても同様に,評価ビット列は一致する。
【0107】
以上の検討から,N2Tが2以下の場合,SbER算出のための評価ビット列と,図18に示した評価主ビット列が一致することが判った。同様にして,N2Tが3以上の場合についても,L−SEAT算出用の主ビット列として,SbERと最大値が同一になるようなハミング距離までの主ビット列に対して,ラン長制限を満たし,かつハミング距離を最小とする主ビット列をL,Rの主ビット列として選択することによって,同様に評価主ビット列が一致するようにできる。N2Tが3の場合の具体例については後述する。L−SEATの基本概念は、図5に示したようにユークリッド距離差の分布の平均値が理想ハミング距離の差と異なる場合に、対称性に着目して評価するエッジを左右にシフトさせた目標信号を用いて、それらの分布の平均値の差分からエッジシフトを評価するものである。この概念に従って、各時刻において拡張エッジシフトを評価する方法((式D1)から(式D6))、もしくは独立に算出したユークリッド距離差の分布の平均値を評価する方法((式7)から(式13))によって、エッジシフトを評価するものである。また、評価主ビット列は図18に示したものに限らず、N2Tが3の場合を含めた種々のバリエーションを用いることができる。
【0108】
以上のように,図18に示した評価主ビット列に対して、等価エッジシフトに基づく評価を実施することによって,評価主ビット列の親和性の観点からもSbERやそれに概念の共通する指標との相関性を向上した評価指標としてL−SEATを提供することができる。この点は本発明における第4の改善点である。
【0109】
(課題3)短時間での記録調整の実現に関して
記録パルスの条件,もしくは適応型記録パルスの各パラメータに対応して、それぞれ独立に評価可能な評価指標と調整方法を提供する必要がある。一般の光ディスク装置としては,単一の規格だけに対応するだけでなく,CD,DVD,BD,あるいはBDを基本とした高密度の光ディスクについても,同様に対応する必要がる。これらの規格に応じて,適応型記録パルスはそれぞれ異なるものである。また,記録調整のための評価指標としても,タイム・インターバル・アナライザーで測定する時間軸方向のエッジシフトおよびジッター,V−SEAT,本発明のL−SEAT等,それぞれに適したものを使うことが望まれる。これを実現するためには,先ず,記録調整用のパラメータ・テーブルとして選択すればよい。その上で,再生信号の各エッジごとにそのエッジシフトやSNRファクタのような評価値を算出する回路を前段に配置することによって,包括的な対応が可能になる。こうした,記録条件の調整用の回路のブロック構成の例を図22に示す。図において,光ディスク媒体から再生され,図示しないアナログフィルター処理を施された再生信号51はA/D変換器21によって6から8ビットのデジタル・データに変換され,自動等化器22によって等化された後PRMLデコーダ23によって2値化され,2値化ビット列52が出力される。記録条件調整用の信号品質の評価回路30はエッジ品質評価回路40,41,42,とセレクタ60,及び記録パルス品質評価テーブル35,およびタイミング調整器36から構成される。エッジ品質評価回路40はエッジごとにCD/DVD用の時間軸方向のエッジシフトの評価を行い,エッジ品質評価回路41はBD用にV−SEATの評価を行い,エッジ品質評価回路42は高密度BD用にL−SEATの評価を行う。各エッジ品質評価回路ではエッジごとにエッジシフト量,あるいは拡張エッジシフトやSNRファクタの算出を行う。セレクタ60では記録再生を行うディスクの種別に対応して,エッジ品質評価回路の出力を選択する。記録パルス品質評価テーブル35では,2値化ビット列52と,エッジ品質評価回路から出力されたエッジの評価指標を同期して,適応型記録パルスに応じたパターンの仕分けを行い,4x4テーブル等に分離して,各テーブル要素ごとに平均値や標準偏差の算出を行う。CPU140ではこの結果を参照しながら,適応型記録パルスの各パラメータの調整処理を実施する。以上の構成によって,複数の光ディスク媒体に対応した適応型記録パルスのパラメータ調整が可能になる。こうした構成によって,複数の適応型記録パルスのパラメータを並列して調整することが可能となり,単一の再生信号品質の評価指標を用いた方法に比較して,短時間の内に,かつ限られた試し書き領域を用いて記録パルスの条件調整が実施できる。
【0110】
(課題4)マークの後エッジ位置制御の高精度化に関して
次に,記録容量が30GB以上の高密度光ディスクに対して,記録パルスの調整単位がチャネルビット周期の1/16という条件下においても,記録マークのエッジ位置を高精度に制御するための手段について説明する。
【0111】
従来のBDの記録パルスでは,ラストパルスの幅を変化させることによりラストパルスの終了位置を変化させていたため,マークの後エッジ形成部分への熱エネルギーの注入量が変化するため,ラストパルスの終了位置の変化に対するマーク終端位置の変化率が大きくなることが課題であった。
【0112】
そこで本発明では,ラストパルス開始位置を指定するパラメータdTLPを導入した。図45は,従来のBDの記録ストラテジに本発明のdTLPを追加した記録パルス波形を示した図である。dTLPは,記録データのNRZIチャネルビット信号を基準として図45に示したように定義される。
【0113】
TLPを固定した状態でdTLPを変化させると,ラストパルスの幅を変化させることなくラストパルスの位置を変化させることができる。この場合,記録マークの後エッジ形成部への熱エネルギーの注入量の変化が小さいため,ラストパルス終了位置の変化に対するマークの後エッジ位置の変化率を小さくすることができる。なお,この方法により記録マークの後エッジ位置が変化するのは,ラストパルス直前のギャップの大きさが変化することにより,マーク終端形成部分における最大到達温度が変化するためであると考えられる。
【0114】
図46は,本発明において導入したラストパルス開始位置dTLPのパラメータテーブルを示した図である。dTLPの値は,記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の合計3×4通り分類して指定される。
【0115】
次にラストパルス開始位置を指定するパラメータdTLPを導入した効果を示す。図47は,図44に示した実験と同様に4Tマークに対応するラストパルス終了位置を変化させながら、4Tマークの後エッジのエッジシフトを測定した結果である。ここでは,ラストパルス終了位置は2種類の方法で変化させ,それぞれ結果をプロットした。1つは,従来のBDの記録パルスに基づき,ラストパルス開始位置を固定した状態でラストパルス幅TLPのみを変化させることによりラストパルス終了位置を変化させたものであり,もう1つは,本発明の記録パルスに基づき,ラストパルス幅TLPを固定した状態でラストパルス開始位置dTLPを変化させることによりラストパルス終了位置を変化させたものである。ラストパルス終了位置の調整単位はチャネルビット周期の1/16とした。使用した追記型光ディスク試料や記録再生条件等の実験条件は上述の実験の場合と同様である。ここでは,4Tマーク記録パルス列のラストパルスの時間幅TLPを,後続スペース長によらず一律に変化させた。また,このときのTLPの値の調整単位は従来のBDに従いチャネルビット周期の1/16とした。
【0116】
図47によると,従来のBDの記録パルス(TLP制御)を用いてラストパルス終了位置を変化させた場合には,ラストパルス終了位置を1単位変化させたときの記録マークの後エッジのエッジシフトの変化は約16ポイントであったのにたいして,本発明の記録パルス(dTLP制御)を用いた場合は6ポイントであった。従って,本発明のdTLPを用いることによりエッジシフトの値を,前述した良好な記録品質の目安である±5%以内に常に収めることができるはずである。
【0117】
以上のように,BDシステムに基づいて容量が30GB/面以上となるような高密度記録条件に対応する記録条件の調整に関して、前述の従来の技術の課題を解決し,(1)調整結果に基づいて記録したデータの再生互換性に優れ,(2)調整結果に基づいて記録したデータの品質がSbER等の再生信号の評価指標で測定して十分に良好な結果を保証し,(3)適応型記録パルスの条件調整を短時間で実施可能で,かつ(4)マークの後エッジ位置を高精度に制御可能な記録条件の調整のための評価指標と調整方法,およびこれを用いた光ディスク装置の提供ができるようになった。
【0118】
本発明の骨子は、BDのように最短ラン長が2Tの符号を用いた光ディスクにおいて、3種以上のハミング距離(N2T=0,1,2に対応)に対する目標信号を用いて、再生信号を評価する方法において、着目するエッジの品質の評価を各時刻において拡張エッジシフトを評価する方法、もしくは独立に算出したユークリッド距離差の分布の平均値を評価する方法によって評価し、これに基づいて記録条件を調整する方法とこの方法を実装した光ディスク装置である。
【発明の効果】
【0119】
以上のように,本発明のL−SEATを評価指標とする記録条件の調整方法によって,BDにおいて30GB相当以上の高密度記録を実現する光ディスク装置を提供することができるようになった。
【図面の簡単な説明】
【0120】
【図1】本発明の光ディスク装置を実現するための再生信号評価回路の構成を示すブロック図。
【図2】試作した3層構成の追記型光ディスク試料を用いて測定した記録パワーとビットエラー数の関係をまとめた実験結果。
【図3】SNRとSbERの関係をまとめたシミュレーション結果。
【図4】ビットエラー率とSbERの関係を表す実験結果。
【図5】記録容量とユークリッド距離差の分布の関係。
【図6】シミュレーションで求めたTsfp(3s,2m)の評価に用いるユークリッド距離差の分布。
【図7】SNRとEc’の関係。
【図8】再生パワーと分布中心ずれの関係。
【図9】等価エッジシフトを表す摸式図。
【図10】等価エッジシフトを表す摸式図。
【図11】ハミング距離とcosθの関係。
【図12】dEDLとdEDRの関係。
【図13】dEDLとdEDRの平均値と拡張エッジシフトDの関係。
【図14】SNRとEc’および拡張エッジシフトDの平均値の関係。
【図15】PR(1,2,2,2,1)対応評価ビット列テーブル。
【図16】特徴抽出したPR(1,2,2,2,1)対応評価ビット列テーブル。
【図17】主ビット列と第2の主ビット列生成操作テーブル。
【図18】評価主ビット列(N2Tmax=2)。
【図19】評価主ビット列の比較。
【図20】評価主ビット列の比較。
【図21】評価主ビット列の比較。
【図22】評価回路のブロック図。
【図23】評価主ビット列(N2Tmax=3)。
【図24】評価主ビット列(N2Tmax=2)の別の実施例。
【図25】評価主ビット列(N2Tmax=3)の別の実施例。
【図26】評価主ビット列と記録パルステーブルの対応を示す図。
【図27】評価主ビット列と記録パルステーブルの対応を示す図。
【図28】L−SEATによるエッジシフト評価を示す図。
【図29】L−SEATによるエッジシフト評価を示す別の図。
【図30】L−SEAT分布とSAM分布。
【図31】再生パワーとL−SEAT評価指標の関係。
【図32】対称型自動等化器の構成を示すブロック図。
【図33】L−SEATによる記録調整の実験結果。
【図34】L−SEATによる記録調整の実験結果。
【図35】L−SEATによる記録調整の実験結果。
【図36】L−SEATによる記録調整の実験結果。
【図37】記録調整後のパワーマージンを示す図。
【図38】ビットエラー率とジッタの関係を示す図。
【図39】記録パルスの調整方法を示す摸式図。
【図40】本発明の記録調整方法のフローチャート。
【図41】本発明の評価方法を用いたフォーカス調整方法を示す図。
【図42】光ディスク装置の構成を示す模式図。
【図43】従来のBDの記録パルス波形を示す図。
【図44】従来のBDの記録パルスを用いた場合のラストパルス終了位置と記録マークの後エッジのエッジシフトの関係を示す図。
【図45】本発明の記録パルス波形を示す図。
【図46】本発明のラストパルス開始位置dTLPのパラメータテーブルを示す図。
【図47】本発明の記録パルスを用いた場合のラストパルス終了位置と記録マークの後エッジのエッジシフトの関係を示す図。
【図48】本発明の記録パルス調整方法のフローチャート。
【発明を実施するための形態】
【実施例1】
【0121】
以下、図面を参照して本発明による記録条件の調整方法および光ディスク装置について実施形態を説明する。
【0122】
図23は本発明によるエッジ評価主ビット列を列挙したテーブルの別の実施例である。ここではN2Tが3の場合を示した。主ビット列の総数は20であり,各主ビット列の中で下線で示したビットが注目するエッジを表している。主ビット列No.1−12は図18に示したものと共通であり、主ビット列No.13−20が2Tの連続数が3の場合に対応したものである。前述のように、図15および図16に示したSbERでは、2番目に確からしい評価ビット列は1つであるため、2値化されたビット列が"0000011001100"のように連続する2Tが3つの場合についても、ハミング距離が3である"0000110011000"を2番目に確からしい評価ビット列として再生信号の品質を評価する。一方、図15に示した評価主ビット列ではこれを評価しない。記録密度とディスク媒体の条件によって、こうしたビット列を独立して評価する必要がある場合、すなわち2Tの連続数が2の場合と3の場合とて、記録する2Tマークのエッジシフトの差異が無視できない場合には、回路規模は増大するが図23の評価主ビット列を用いることが必要となる。また、図23の評価主ビット列を用いることによって、主ビット列No.15と17に見られるように、Tsfp(2s,2m)に先行するマークが3T以上の場合(No.15)と2Tの場合(No.17)を分離して評価することができるようになる。記録パルスとして、記録するマークに先行するスペースだけでなく、さらに先行するマークの長に応じた適応型記録パルスを用いる場合にも、図23の評価主ビット列によって、記録パルスのテーブルに1対1に対応した記録調整のための情報を得ることができる。評価主ビット列に含まれる2Tの連続数(N2T)については、こうした状況を判断して適切なものを用いればよい。SbERの算出の評価ビット列との関係は、前述のN2T=2の場合と同様に1:1対応の関係にある。N2Tが4以上の場合については、冗長なため説明しないが図18と図23の関係から、光ディスク技術に係る一般の技術者であれば容易に拡張することができるはずである。
【0123】
図24は本発明によるエッジ評価主ビット列を列挙したテーブルの別の実施例である。ここではN2Tが2の場合について、L,Rのハミング距離を等しくした場合を示す。主ビット列の総数は12であり,各主ビット列の中で下線で示したビットが注目するエッジを表している。図18との差異は、L,R用の主ビットを生成するための生成ビット列とハミング距離である。図18の評価主ビット列と用いると、SbERの評価ビット列との1:1の対応関係は得られないが、SNRに対する分布のずれを原理的に相殺することができるため、図14に示したSNR依存性よりも、良好なSNRの依存性(原理的に一定)を得ることができる。ドライブ装置や媒体の環境変化によるSNRの変化に対する配慮を第1優先にする場合には、こうした評価主ビット列を用いればよい。
【0124】
図25は本発明によるエッジ評価主ビット列を列挙したテーブルの別の実施例である。ここではN2Tが3の場合について、L,Rのハミング距離を等しくした場合を示す。図23に対するテーブルの特徴と評価性能は、図24の説明と同様であり、良好なSNRの依存性(原理的に一定)を得ることができる。
【0125】
図26と図27は評価主ビット列と記録パルステーブルの対応関係を示す実施例である。主ビット列番号とを列挙したテーブルの別の実施例である。図26は図18に示した評価主ビット列と、前後エッジ4x4テーブル型の記録パルスに1:1対応した評価テーブルである。図に見られるように例えば、Tsfp(2s,2m)の評価結果には主ビット列No.9の結果を用いればよい。このテーブルを参照して、ドライブ装置の記録調整用の回路を構成すれば、4x4テーブル型の記録パルスの各パラメータの調整にL−SEATを用いることができる。図27はこの場合の、L,Rのハミング距離をまとめたものである。このように、L−SEATによるエッジの評価結果は、記録パルスのパラメータテーブルに一致するように容易に展開可能である。これは、図23から図25に示した評価主ビット列についても同様に、記録パルスのパラメータテーブルに対応する評価を行うことができる。
【0126】
図28と図29記録パルスのパラメータテーブルに対応したL−SEATによるエッジ評価の一例を示すシミュレーション結果である。シミュレーション条件は前述と同じで、記録密度はBDにおける33GB/面相当、PRクラスは(1,2,2,2,1)である。ここでは、Tsfp(2s,2m)を+0.2Tシフト(右側へ0.2T移動)した場合のシミュレーション結果を示している。図28は、各時刻において拡張エッジシフトを評価する方法((式D1)から(式D6))を用いた場合である。図28(b)に見られるように、Tsfp(2s,2m)のエッジシフトを検出し、対応する分布が右側にシフトしていることが判る。記録パルスの各パラメータに対して、各々エッジシフトがゼロに近づくように調整することによって、良好な記録条件を得ることができる。図29は、独立に算出したユークリッド距離差の分布の平均値を評価する方法((式7)から(式13))を用いた場合である。ここでは、L,Rシフトとして、ハミング距離が共に2のものについてのシミュレーション結果を示している。図29(a)に見られるように、エッジシフトがゼロの場合、L,Rの分布の平均値は理想ユークリッド距離差(=1)とは異なるが、両者は誤差範囲で同じ平均値を持つ。一方、図29(a)に見られるように、エッジシフトがゼロでない場合には、L,Rの分布の平均値は逆方向に分離する。したがって、L,Rシフトの分布の平均値が一致するように記録パルスのパラメータを調整することによって、良好な記録条件を得ることができる。このように、L,Rの評価主ビット列のハミング距離が等しくなるようにすれば、対称性を利用してSNRに依存しないで記録条件の調整が実施できる。前述のように、L,Rの評価主ビット列として、ハミング距離が異なるものを用いることもできる。
【0127】
図29はシミュレーションによって求めたL−SEAT分布とSAM分布を比較したものである。シミュレーション条件は前述と同じで、記録密度はBDにおける33GB/面相当、PRクラスは(1,2,2,2,1)である。各SAM分布の平均値がSNRの低下に依存して、ゼロに近づくようにずれて行くのに対して、L−SEATの分布の平均値はゼロで、SNRに依存せずに一定であることが確かめられる。評価主ビット列として、N2Tが3以上の場合はこれの拡張形態であるので、同様な結果が得られる。
【0128】
図30はL−SEATのSNR依存性を実験的に確かめた結果である。これは、前述の試作3層ディスクのL0において、再生パワーを変化させながら再生実験を実施して得た結果であり、従来技術による図8の結果に対応したものである。図の横軸は再生パワー1.2mWを100%として表している。再生信号振幅は再生パワーに比例するが光検出器のノイズ(アンプノイズ)は一定であるため、本実験は、再生パワーを変化させることによって再生信号のSNRを変化させた結果である。L−SEAT指標は、図22に示した構成によって、記録マークの前後エッジに対してそれぞれ4x4のテーブルに仕分けして、シフトとジッタを評価した。図31(a)はL−SEATジッタの測定値であり、再生パワーの低下に依存してジッタが大きくなっているのはSNRの変化を反映したものである。一方、図31(b)はTsfp(2s、2m)についてのエッジシフトの評価結果を示すものである。再生パワー(SNR)に依存せず、エッジシフトの値が一定であることが判る。これはL−SEATによって、ユークリッド距離の差に基づくマージン評価指標をエッジシフトの成分とSNRに依存した成分に分離して評価を可能とする本発明の方法の特長である。これにより、本方法を用いればドライブ装置の個体差および環境条件の差異に基づくSNR変化に依存せずに、再生互換性の高い記録条件の調整が実施できることが確かめられた。
【0129】
ここで、記録調整に用いるのに好適な自動等化器について説明する。
【0130】
図32は本発明の対称型自動等化器の構成を示すブロック図である。前述のように、L−SEATを用いればSNRの変化に対して安定した記録パルスの調整を実施することができる。一方、実際のドライブ装置では、(1)ディスク媒体と光ヘッドの相対的な傾き角(タンジェンシャルチルト)角を主因とした光スポットの捜査方向の非対称性、および(2)自動等化器のタップ係数の非対称性に基づく再生信号の時間軸方向の非対称が存在する。これらの時間軸方向の再生信号のひずみは、エッジシフトとして検出されるため、再生互換に優れた記録条件の調整を実施する上での障害となりうる。例えば、記録マークにエッジシフトが残留する場合でも、自動等化器がそれを補償するように内部のタップ係数を非対称に学習してしまえば、測定されるエッジシフトが小さく良好な記録と判断される。一般に、ドライブメーカごと、あるいは機種ごとに再生系の構成は異なるものであるから、このような当該ドライブのみが再生しやすいようなデータを記録することは、媒体可換なストレージ・システムである光ディスクにおいては解決しなければならない課題である。ここに示した対称型自動等化器は解決手段を提供する。図において,図示しない光ディスク媒体から再生された再生信号51は図示しないA/D変換器によってデジタル・データに変換され,自動等化器22によって等化された後PRMLデコーダ23によって2値化され,2値化ビット列52が出力される。自動等化器の各タップ係数C0、C1、C2、…は2値化ビット列52に基づく目標信号と自動等化器22の出力信号のRMS誤差が最小になるように、自動的な学習処理が実施される。このアルゴリズムは一般的にLMS(Least Mean Square)法と呼ばれ、LMS回路62により実施される。本構成において、LMS回路によって更新されたタップ係数a0、a1、a2、…は一旦バッファ64に蓄えられ、FIRフィルタの実際の動作に用いるワークレジスタ65には、図示するように、時間軸方向に対称な位置のタップ係数(a0とaN−1の組み合わせ等)の間で平均化された値を設定するようにする。このような構成によって、自動等化器はタップ係数が対称化され、記録マークのエッジシフトを歪めて再生することを防ぐことができるようになる。また、光検出器に含まれるI−V変換アンプやその他のフィルターにも回路的な群遅延が残留する場合がある。必要に応じて、群遅延補償器61を実装することによって、こうした群遅延を低減することができる。群遅延補償器61は、所定の値の非対称なタップ係数をもつFIRを用いて実現することができる。さらに、本構成の回路を用いて、良好に記録されたリファレンスディスクを再生し、SbERもしくはL−SEATジッタ等が最小となるようにタンジェンシャルチルト量を調整することによって、光スポットの時間軸方向の非対称性を低減することが可能となる。こうした構成によって、自動等化器は再生信号の周波数特性の調整だけについて作用するようにすることができる。L−SEATに限らず、本構成による対称型自動等化器は、従来の記録調整方法と組み合わせても、再生互換性の高い記録条件を得ることができる。LMS回路62の結果を直接バッファ64に転送することは、セレクタ等の回路追加により実現できるため、本構成の対称型自動等化器を通常(対称型制限のない)の自動等化器として動作させることも容易である。
【0131】
以下の結果は、タップ数21の対称型自動等化器を用いた結果である。
【0132】
図33から図37はL−SEATを用いた記録パルスの条件調整の結果を示す実験データである。ここでは前述の試作3層ディスクのL0において、Tsfp(2s、2m)、Tsfp(3s、2m)、Tsfp(2s、3m)、Tsfp(3s、3m)の4つの記録パルスパラメータを変化させながら、L−SEATジッタ、L−SEATシフト、SbERを測定した結果である。SbERについては通常の再生と同様に自動等化器のタップ係数の対称型制限をしない状態で測定を行った。記録パルスのエッジの調整単位はT/64とし、記録再生の線速度はデータ転送レートがBDの2倍速相当となる条件とした。これらに見られるように、L−SEATシフトのゼロ点、およびL−SEATジッタおよびSbERのボトム条件はT/64のパルス幅以下の精度で一致することが判る。一般に、記録パルス幅の調整単位はT/16程度であるので、これらの結果からL−SEATシフトおよびL−SEATジッタを用いて、非常に良好な記録条件調整を実施することができることが確認できた。こうした調整を全ての記録パルスパラメータについて実施した結果、SbER値は3x10−3から1x10−7に改善した。図37は記録調整後の記録パワーとビットエラー率の測定結果である。約±10%と良好なパワーマージンを得ることができるようになった。
【0133】
図38はビットエラー率とL−SEATジッタの関係を示す実験結果である。ここでは記録パワー、デフォーカス、球面収差、ディスク媒体のタンジェンシャルチルトおよびラジアルチルトを変化させながら、L−SEATジッタおよびV−SEATジッタとビットエラー率の関係を測定した。図に見られるように、V−SEATに比較して、L−SEATの方がビットエラー率とジッタの相関が改善されていることが確かめられた。この理由は前述のとおりである。
【0134】
以上の実験とシミュレーションの結果に基づいて、本発明の記録条件の調整方法について図面を用いて説明する。
【0135】
図39は記録パルスの適応パラメータの調整方法を示す実施例である。ここでは、記録パルスの適応パラメータが4x4型テーブルの場合について示す。L−SEATによるエッジシフトとジッタの測定結果は前述のように4x4テーブルに仕分けする。このとき、記録パルスの条件を変更して光ディスク媒体に記録行い,当該個所を再生して対応するL−SEATのシフト値を評価し,これを最小にするように,記録パルスのパラメータを決定することによって、良好な記録パルスの条件を得ることができる。図33から図36の結果に見られるように、L−SEATのシフトだけでなくジッタの最小条件も含めて調整することによって、種々の変動に対して、より安定した調整結果を得ることができるようになる。この例からも明らかなように,記録パルスパラメータとその評価値が1対1に対応していることから,一度に複数の記録パルスパラメータを変更して記録/再生を行なうことで,同時に複数の記録パルスパラメータを並列に適正化することができる。これによって、ドライブ装置における試し書き時間を大幅に短縮することが可能になる。具体的には,記録パルスパラメータを順に1つずつ決定する方法では,2倍速のドライブ装置で処理時間が30秒から1分程度かかるのに対して,本方法を用いて並列処理を実施すると,約1秒で試し書きを終了することができるはずである。このした調整方法の場合、記録パルスの条件において固定した条件の部位があると安定した調整が実施できる。一般的には、Tsfp(5s、5m)とTelp(5s、5m)等の長マークの形成条件をこれに当てることが望ましい。
【0136】
図40は記録パルスの調整の全体の流れを示すフローチャートである。まず、ステップS101では、必要に応じて再生回路の群遅延をチェックし図32に示した再生回路の群遅延補正条件を決定する。次に、ステップS102では自動等化器の動作モードを対称型モードに設定する。ステップS103では、リファレンスデータ等を再生しながら、SbERやL−SEATジッタ等の再生評価指標が最良の状態になるように、デフォーカス量、球面収差補正量、ディスク媒体のチルト量を調整する。前述のように、タンジェンシャルチルトについては、複数のリファレンスデータを再生したり、記録感度が最良になる条件を加えたりして、特に配慮した調整を行う必要がある。ステップS104では5T以上のマーク・スペースからなる記録データを用いて、再生信号の対称性、S/N比、クロストーク量などを加味しながら、適正な基本パルスとパワー条件を定める。これによって4x4テーブルにおける長マークの記録条件Tsfp(5s、5m)とTelp(5s、5m)を固定する。Tsfp(5s、5m)は前エッジのパルス条件、Telp(5s,5m)は後エッジのパルス条件である。ステップS105とS106では、記録パルスの適応パラメータを調整しながら、残留するエッジシフトが所定の値(例えば±0.1%T)以下になるまで調整を行う。ステップS107では、得られた記録パルスに対して、SbERやビットエラー率のボトム値やパワーマージンを評価して、記録パルスの性能評価を実施して所定の性能が得られるかを判断し、不十分な場合には、ステップS104に戻って基本パルスとパワーを変化させて同様な調整を行う。こうした一連の流れによって、所定の性能が得られたならば、調整を終了する。
【0137】
図41はフォーカスオフセット量とSbERの関係を示す実験結果である。自動等化器は本発明の対称型自動等化器を用いた。こうした関係を利用して,SbERを最小にするようにすれば,適正なフォーカスオフセット値の調整を実現することができる。同じ方法は,ラジアルチルトやタンジェンシャルチルト,球面収差,種々の調整に応用することができる。こうした方法によって、図39のステップS103を実施することができる。
【0138】
次に,本発明において導入したラストパルス開始位置dTLPについての具体的な調整方法を説明する。
【0139】
L−SEATによるエッジシフトとジッタの測定結果は前述のように,マークの前エッジについては記録マーク長と先行スペース長の4x4,マークの後エッジについては記録マーク長と後続スペース長の4×4のテーブルにそれぞれ仕分けする。dTLPのパラメータについて,後エッジに関するL−SEATと同様に仕分けするが,2Tマークの記録パルスはラストパルスを持たないため,実際にはdTLPは記録マーク長について3種類(3T,4T及び5T以上),後続スペース長について(2T,3T,4T及び5T以上)の3×4のテーブルに仕分けする。
【0140】
このとき、3×4に仕分けされたdTLP個々の値を変更して光ディスク媒体に記録行い,当該個所を再生して対応するパターンのL−SEATのシフト値を評価し,それぞれのシフト値を最小にするように,個々のdTLPの値を決定することによって、良好な記録パルスの条件を得ることができる。ここで,シフト値を最小にするとは,シフト値の絶対値を最小にするという意味である。すなわち,上記の記録パルス調整方法は,L−SEATのそれぞれのシフト値が最もゼロに近づくように個々のdTLPの値を決定するというものである。
【0141】
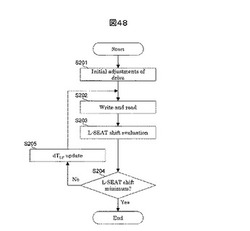
図48はdTLPの調整の全体の流れを示すフローチャートである。調整開始時の前提として,前述の方法を用いて再生回路の群遅延補正条件の決定されており,自動等化器の動作モードは対称型モードに設定されているものとする。また,記録装置に対してdTLPの初期値が設定されているものとする。
【0142】
処理開始後,
ステップS201では、リファレンスデータ等を再生しながら、再生評価指標が最良の状態になるように、デフォーカス量、球面収差補正量、ディスク媒体のチルト量などを調整する。
ステップS202では,光ディスク媒体にデータにランダムデータを記録し,当該箇所を再生して再生信号波形を取得する。
ステップS203では,取得した再生信号波形に基づいてマークの後エッジについてのL−SEATのシフト値を上述のように3×4に分類して算出する。
ステップS204では算出したL−SEATのシフト値が,それぞれ最小であるかを判定し,結果が“No”のときには,ステップS205で,最小でないパターンのdTLPの値を更新する。このようにして,3×4の全てのパターンのL−SEATのシフト値がそれぞれ最小になるまで処理を繰り返し,処理を終了する。
【0143】
なお,dTLP以外の記録パルスパラメータにも,上記の調整フローを同様に適用することが可能である。
【0144】
以下,本発明の光ディスク装置に関する実施例を説明する。
【0145】
図1は本発明の光ディスク装置を実現するための再生信号評価回路の構成を示す実施例である。図において,光ディスク媒体から再生され,図示しないアナログフィルター処理を施された再生信号51はA/D変換器21によって6〜8ビットのデジタルデータに変換され,自動等化器22によって等化されたのちPRMLデコーダ23によって2値化され,2値化信号52が出力される。L−SEATを算出するための再生信号品質の評価回路30は主ビット判別回路31,評価ビット列生成回路32,ユークリッド距離計算回路33,記録パルス対応パターン仕分け器34、および評価値集計回路35によって構成される。主ビット列判別回路31には,所定の主ビット列のデータが格納されており,2値化信号52に主ビット列が含まれるかどうかを判定する。2値化信号52に主ビット列が含まれる場合,評価ビット列生成回路32は図18等に説明したXOR処理を実施して,LおよびRの評価ビット列を生成する。ユークリッド距離計算回路33では,T,L,Rの評価ビット列の目標信号と自動等化器22から出力される等化再生信号53との間のユークリッド距離を算出する。記録パルス対応パターン仕分け器34では、ユークリッド距離差の値を用い、各時刻において拡張エッジシフトを評価する方法((式D1)から(式D6))、もしくは独立に算出したユークリッド距離差の分布の平均値を評価する方法((式7)から(式13))に従い、記録パルスの適応テーブルに沿った形式でそれぞれの値を統計的に処理する。評価値集計回路35では図39等に示したテーブルを求める。CPU140はこれを参照すると共に、図示しない記録パルスの設定回路を制御して記録パルスのパラメータを変更し、図40に示した方法に従って、記録パルスの各パラメータを調整する。
【0146】
図42は,本発明の再生信号の評価方法を搭載した光ディスク装置の構成例を示す模式図である。装置に装着された光ディスク媒体100は,スピンドルモータ160により回転される。再生時には,CPU140によって指令された光強度になるようにレーザパワー/パルス制御器120が光ヘッド110内のレーザドライバ116を介して半導体レーザ112に流す電流を制御し,レーザ光114を発生させる。レーザ光114は対物レンズ111によって集光され,光スポット101を光ディスク媒体100上に形成する。この光スポット101からの反射光115は対物レンズ111を介して,光検出器113で検出される。光検出器は複数に分割された光検出素子から構成されている。再生信号処理回路130は,光ヘッド110で検出された信号を用いて,光ディスク媒体100上に記録された情報を再生する。本発明は図1に示した回路ブロックとして再生信号処理回路130に内蔵される。こうした構成によって,本発明の光ディスク装置は,30GB以上のBDを実現する装置として,試し書きによって記録パルスの条件を適正化し、良好なシステムマージンと再生互換性を確保することができる。
【産業上の利用可能性】
【0147】
本発明は,大容量光ディスクの記録条件の調整方法と光ディスク装置に関するものである。
【符号の説明】
【0148】
21 A/D変換器
22 自動等化器
23 PRMLデコーダ
30 再生信号の評価回路
31 主ビット列判別回路
32 評価ビット列生成回路
33 ユークリッド距離計算回路
34 記録パルス対応パターン仕分け器
35 評価値集計回路
51 再生信号
52 2値化信号
53 等化再生信号
100 光ディスク
101 光スポット
110 光ヘッド
111 対物レンズ
112 半導体レーザ
113 光検出器
114 レーザ光
115 反射光
116 レーザドライバ
120 レーザパワー/パルス制御器
130 再生信号処理器
140 CPU
160 スピンドルモータ
【技術分野】
【0001】
本発明は,記録媒体上に物理的性質が他の部分とは異なる記録マークを形成し,情報を記憶する光ディスク媒体への情報を記録する記録条件の調整方法、それを用いた光ディスク装置及び情報記録方法に関する。
【背景技術】
【0002】
光ディスク媒体としてはCD−R/RW,DVD−RAM,DVD±R/RW,BD等多くのものが存在し,データ層を2層持つ媒体も含めて広く一般に普及している。対応する光ディスク装置としては,CD−R/RW,DVD−RAM,DVD±R/RWの記録/再生に対応した,いわゆるDVDスーパーマルチドライブが普及している。今後はBDに対応する高機能ドライブが普及していくものと考えられ、さらに大容量の光ディスクの登場が望まれている。
【0003】
光ディスクの高速化と高密度化に伴いPRML(Partial Response Maximum Likelihood)再生方式による再生信号の2値化技術が必須になってきている。PRML方式の1つとして,目標信号レベルを再生信号に応じて適応的に変化させる適応PRMLまたは補償PRML方式がある。非特許文献1「電子情報通信学会論文誌CJ90−C,pp.519 (2007)」によれば,こうしたPRML方式を用いて,再生信号のアシンメトリ及び記録時の熱干渉を補償することによって,BD対応の装置で,35GB容量相当の高密度化が実現可能なことが示されている。使用されるPRML方式の拘束長(クラスを表すビット長)に応じて,拘束長が長い程,高密度条件での再生性能が高いことが示されている。こうしたPRML方式を備えた光ディスク装置では、最良の2値化結果を得るために、再生信号とPRMLの目標信号とのRMS誤差を最小にするような自動等化器が搭載される。自動等化器はタップ係数が可変なFIR(Finite Impulse Response)フィルターとして実装されることが一般的である。
【0004】
光ディスクの記録密度を増加させると、光スポットの大きさに比較して記録マークの大きさが小さくなり、得られる再生信号の振幅も小さくなる。光スポットの分解能は波長λと対物レンズの開口数NAによって定まり、最短ラン長の記録マークの長さがλ/4NA以下になると、その繰り返し信号の振幅がゼロになる。これは一般に光学カットオフとして知られている現象であり、BDにおいてはλ/4NA≒119nmである。BDにおいてトラックピッチを一定とした場合、容量約31GB以上を実現しようすると最短ラン長である2Tの繰り返し信号の振幅がゼロになる。こうした高密度条件において良好な再生性能を得るためにはPRML方式の利用が必須である。
【0005】
記録型光ディスクでは、パルス状に強度変調されたレーザ光(以下記録パルス)を用いて、記録膜の結晶状態等を変化させることで所望の情報を記録する。記録膜としては相変化材料や有機色素、ある種の合金や酸化物等が用いられており、広く一般に知られている。CD、DVD、およびBDにおいて用いられるマークエッジ符号方式では、前後のエッジ位置によってコード情報が定まる。
【0006】
図43は,BDで用いられる記録方式の一つである「N−1記録ストラテジ」における記録パルス波形を示した図である。この記録ストラテジでは,NTの長さのマークを(N−1)本のパルスを用いて記録する。図43には,BDのコードに用いられる2T〜9T(Tはチャネルビット長)の長さのマークのうち,2T〜5Tのマークを記録するパルス列を示している。パルス列における最初の最大パワーパルスはファーストパルス,最終の最大パワーパルスはラストパルスと呼ばれる。ファーストパルスとラストパルスの間の複数の最大パワーパルスはマルチパルスと呼ばれ,4Tマークの場合は1本,以降マーク長が1T増える毎に1本ずつ増える。2Tマークのパルス列における最大パワーパルスはファーストパルスのみであり,3Tマークのパルス列における最大パワーパルスはファーストパルスとラストパルスであり,それぞれマルチパルスを含まない。パルス列における最終の最大パワーパルスの直後のパルスはクーリングパルスと呼ばれる。
【0007】
レーザ光の出力パワーレベルとしては,ライトパワーPW,スペースパワー(イレーズパワー)PS,バイアスパワーPBW,クーリングパワーPCの4種類がある。ライトパワーPWはパルス列における最大パワーレベルであり,ファーストパルス,マルチパルス及びラストパルスのパワーレベルである。このパワーレベルは記録膜にエネルギーを投入して状態変化を起こさせるために用いられる。スペースパワーPSは,マーク間(スペース)となる部分に照射するパワーレベルであり,追記型ディスクに対しては主に次のマークを形成するための予熱に用いられ,相変化記録膜を用いた書き換え型ディスクに対しては主にマークを消去してスペースに変化させることで直接書き換えを行うために用いられる。クーリングパワーPCは,クーリングパルスのパワーレベルであり,追記型ディスクに対しては主に後続マーク記録部への熱の拡散を遮断し熱干渉を低減する目的で用いられ,書き換え型ディスクに対しては主に記録膜の加熱後の急冷により非晶質のマークを形成する目的で用いられる。なお,上記の各パワーレベルはマーク長によらず一律の値を用いる。
【0008】
また,パルスのタイミングに関するパラメータとしては,ファーストパルスの始端位置dTtop,ファーストパルスの時間幅Ttop,マルチパルスの時間幅TMP,ラストパルスの時間幅TLP及びクーリングパルスの終端位置dTS(dTE)がある。ここで,dTtop及びdTS(dTE)は,記録データのNRZIチャネルビット信号を基準として図43に示したように定義される。これらのパラメータの調整単位はチャネルビット周期の1/16である。
【0009】
上記のパルスパラメータのうち,記録マークの前エッジの形成条件を主として定めるdTtopおよびTtopと,記録マークの後エッジの形成条件を主として定めるTLP及びdTS(dTE)が,記録した情報の品質を良好に保つために重要である。このため,BDにおいては,記録マークの長さおよび先行または後続するスペースの長さに応じて上記のパラメータを適応的に変化させる適応型記録パルスを用いる。dTtop及びTtopの値は記録マークの長さと記録マークの直前のスペース(先行スペース)の長さとの組み合わせのパターンで分類して指定し,TLP及びdTS(dTE)の値は,記録マークの長さとマークの直後のスペース(後続スペース)の長さとの組み合わせのパターンで分類して指定する。また,図示しないがTMPはマーク長やスペース長によって分類せず,4T以上の全てのマークに対して一律の値が指定される。
【0010】
前述のような高密度条件においては、形成する記録マークが微細化するため、従来よりも高精度に記録パルスの照射条件(以下、記録条件)を定める必要がある。一方、光ディスク装置の光スポットの形状は、光源の波長、波面収差、フォーカス条件、ディスクのチルト等によって変動する。また、環境温度や経時変化によって、半導体レーザのインピーダンスや量子効率が変化するため、記録パルスの形状も変動する。このように、個体ごと、環境ごとに変動する光スポットの形状と記録パルスの形状に対応して、常に最良の記録条件を得るための調整技術は一般的に試し書きと呼ばれる。記録密度の向上に従って、試し書きによる記録条件の調整技術は重要度を増していく。
【0011】
記録条件の調整技術は、大きく2つの方法に分類される。1つはビットエラーやバイトエラー率を指標とした方法であり、もう1つは、ジッタ等の統計的な指標を用いる方法である。前者は記録されたデータに対して小さな確率で発生する事象に注目したものであり、後者は記録されたデータの平均的な品質に注目したものである。例えば、追記型光ディスクについて考えると、記録条件を変化させながら複数の箇所にデータを記録再生した場合、前者では最良の記録条件であっても記録した個所に指紋があるとビットエラーやバイトエラーが大きくなるため、これを選択することができない。最良の記録条件とはそれによって記録されたデータの平均的な品質を最良とするものであるべきなので、光ディスクのように、媒体欠陥、指紋、埃等の影響を避けることができないストレージ・システムにおいては、統計的な指標を用いる方法が優れていると言える。
【0012】
PRML方式に対応し、記録したデータの品質を統計的に評価する方法としては、Jpn. J. Appl. Phys. Vol. 43, pp.4850 (2004)(非特許文献2)、特開2003−141823号公報(特許文献1)、特開2005−346897号公報(特許文献2)、特開2005−196964号公報(特許文献3),特開2004−253114号公報(特許文献4)および特開2003−151219号公報(特許文献5)などに記載されている技術がある。
【0013】
特許文献1には,最も確からしい状態遷移列に対応する確からしさPaと,2番目に確からしい状態遷移列に対応する確からしさPbを用い,|Pa-Pb|の分布によって再生信号の品質を評価する技術が開示されている。非特許文献2には、再生信号から得られた2値化ビット列(最も確からしい状態遷移列に対応)の目標信号と再生信号とのユークリッド距離(Paに対応)と、注目するエッジが1ビットシフトした2値化ビット列(2番目に確からしい状態遷移列に対応)の目標信号と再生信号とのユークリッド距離の差(Pbに対応)の絶対値から、2つの目標信号の間のユークリッド距離を減算した値をMLSE(Maxmum Likelihood Sequence Error)と定義し、記録パターンごとにMLSEの分布の平均値がゼロになるように、記録条件を調整する技術が開示されている。
【0014】
特許文献2には,エッジシフトに注目し、再生信号のエッジ部が左右にシフトする誤りパターンに仮想的な1Tラン長を含むパターンを用いるとともに,エッジシフトの方向に基づいて,符号付きシーケンス誤差の差を求めることによってエッジシフト量を求め、これをゼロに近づけるように記録条件を調整する技術が開示されている。この評価指標はV−SEAT(Virtual state based Sequence Error for Adaptive Target)と呼ばれる。
【0015】
特許文献3および特許文献4には、正パターンと対応する誤パターンの組み合わせを予め収納したテーブルを利用することによって,再生信号と正パターン及び誤パターンのユークリッド距離の差を計算し,その平均値と標準偏差から求めた推定ビットエラー率SbER(Simulated bit Error Rate)を求める技術が開示されている。
【0016】
特許文献5には、再生信号と正パターン及び誤パターンのユークリッド距離の差に基づいて、注目するエッジが左側にシフトした場合の誤り確率と右側にシフトした場合の誤り確率をそれぞれ求め、いずれかが等しくなるように記録条件を調整する技術が開示されている。このため、所定の再生信号、この再生信号の信号波形パターンに対応した第1のパターン、およびこの第1のパターン以外であって再生信号の信号波形パターンに対応した任意のパターン(第2または第3のパターン)が用いられる。まず、再生信号と第1のパターンとの間の距離Eoと、再生信号と任意のパターンとの間の距離Eeとの間の距離差D=Ee−Eoが求められる。次に、複数の再生信号のサンプルについて距離差Dの分布が求められる。次に、求めた距離差Dの平均Mと求めた距離差Dの分布の標準偏差σとの比に基づいて、再生信号の品質評価パラメータ(M/σ)が定められる。そして、品質評価パラメータで表される評価指標値(Mgn)から、再生信号の品質が判断される。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開2003−141823号公報
【特許文献2】特開2005−346897号公報
【特許文献3】特開2005−196964号公報
【特許文献4】特開2004−253114号公報
【特許文献5】特開2003−151219号公報
【非特許文献】
【0018】
【非特許文献1】電子情報通信学会論文誌C Vol. J90−C,pp.519 (2007)
【非特許文献2】Jpn. J. Appl. Phys. Vol.43, pp.4850 (2004)
【発明の概要】
【発明が解決しようとする課題】
【0019】
特許文献1に記載されている最も確からしい状態遷移列と2番目に確からしい状態遷移列,および特許文献3に記載されている正パターンと誤パターンはそれぞれ再生信号との距離を測定するべき目標ビット列という意味で同じものである。特許文献2および特許文献5では目標ビット列が3つあるが、同じ意味のものである。以下,これらを総称して評ビット列と呼ぶことにする。また、本発明ではBDシステムを基本として,30GB以上の大容量化を図ることを目指しているため,以下,変調符号の最短ラン長2Tを前提として説明を進める。
【0020】
非特許文献1に記載されているように,高密度記録を実現するためには,拘束長が5以上のPRML方式が適する。前述のように、BDの光学系条件(波長405nm,対物レンズ開口数0.85)では線方向に記録密度を高めた場合,容量が約31GB以上で2T繰り返し信号の振幅がゼロになる。このとき,PRML方式としては2T繰り返し信号の目標振幅がゼロのPR(1,2,2,2,1)方式等が適することは周知のことである。PR(1,2,2,2,1)方式に対応した再生信号の品質の評価方法としては、特許文献3と特許文献4に開示されたSbERがある。SbERは2値化ビット列(正パターン)の他に2番目に確からしい評価ビット列(誤パターン)として、正パターンとのハミング距離が1(エッジシフト)、ハミング距離が2(2Tデータのシフト)、ハミング距離が3(2T-2Tデータのシフト)を用いて、それぞれの分布をガウス分布と見なして、その平均値と標準偏差から誤差関数を用いてビットエラー率を推定するものである。
【0021】
BD規格を基本として記録容量が30GB以上の光ディスクシステムを実現するために必要な高精度の記録条件の調整技術に求められる性能について説明する。これには、少なくとも調整結果に基づいて記録したデータの品質について、(1)SbER等やビットエラー率等が十分に小さいこと、および(2)1台のドライブ装置で記録したデータの品質は他のドライブ装置においても、SbER等やビットエラー率等が十分に小さいこと、が求められる。要求性能(1)は当然の事柄であるが、要求性能(2)はディスク媒体が交換可能である光ディスク・システムにおいて特徴的に求められるものである。少なくとも2つの要求性能を満足しない記録条件の調整方法は、高密度光ディスクシステムには適さないと言える。
【0022】
以上の2つの要求性能の観点から、従来技術とそれらの組み合わせから類推される技術の課題について説明する。
【0023】
先ず、BDにおいて、線記録密度を高めた実験とシミュレーション結果を用いて、30GB/面相当以上の記録密度で記録再生を実施した場合に発生する種々の事象について説明する。
【0024】
図2は,試作した3層構成の追記型光ディスク試料を用いて測定した記録パワーとビットエラー数の関係をまとめた実験結果である。試作ディスクに用いた記録材料はGe系化合物薄膜であり、各層の層間隔を14μmおよび18μmとして3層構成として、光ヘッドから見て最も奥側の層までの透明カバー層の厚さを100μmとした。トラックピッチは320nmである。記録再生条件はデータ転送速度がBDの2倍速となる条件とし、検出窓幅1Tを約56nmとして、33GB相当の記録密度となるようにした。記録パルスとしては3つのパワーレベル(ピークパワー、アシストパワー、ボトムパワー)の間で変調した一般的なマルチパルス型の記録パルスを用いた。再生信号処理系の構成としては、8ビットのA/D変換器、21タップの自動等化器、PR(1,2,2,2,1)方式のビタビデコーダを用いた。ビットエラー率の最小値は各層共に10-5以下であった。ビットエラー率が最小となるピークパワー値はL0,L1,L2層で各々、13.5mW、15.5mW、11.5mWであった。図はL0層において、3つのパワーの比率を一定にして記録パワーを変化させたときのビットエラーについてまとめたものであり、エッジシフトの他に1個から4個の連続する2Tがまとめてシフト(スリップ)するケースについて調べた結果である。図に見られるように、記録パワーのずれに応じてエッジシフトだけでなく連続する2Tがまとめてシフトする場合のエラー頻度も同等以上に大きいことが分かる。これは、2T-2T信号の振幅がゼロであることと、PR(1,2,2,2,1)方式の場合、エッジシフトに対するユークリッド距離が14であるのに対して、連続する2Tがまとめてシフトする場合のユークリッド距離が12と小さいことに起因した結果である。
【0025】
図3はSNRとSbERの関係をまとめたシミュレーション結果である。ここでは、線形回折シミュレータによって記録マークを再生した時に得られるインパルス・レスポンスを求め、記録ビット列との畳み込み演算によって、理想的に記録が実施された場合の再生信号を算出した。ノイズはホワイトノイズとして加算し、SNRは8T繰り返し信号の半値振幅とノイズの標準偏差の比として定めた。これをPR(1,2,2,2,1)方式による再生信号処理系で処理することによって、ビットエラー率およびSbER等を算出した。特許文献3には2Tの連続数が2までの場合の評価パターンが開示されており、ここでは、これを2Tの連続数を6まで拡張(ハミング距離1〜7)して用いた。評価パターンの数はハミング距離当たり18であるので、その総数は252である。図に見られるように、2Tの連続数2(ハミング距離3)以上で、SbERの値がほぼ一定となることが判る。この結果は図2の実験結果に矛盾するようであるがそうではない。SbERの算出においては定義上、評価パターンの存在確率を加味してビットエラー率を推定するため2Tの連続数が2までの評価であっても、全体のビットエラー率を推定できるのである。
【0026】
図4にビットエラー率とSbERの関係を表す実験結果である。ここではL0層において、クロストークの影響を含むように連続5トラックの記録を行ない中心のトラックにて,種々の記録再生ストレスを与えて実験を行なった。具体的なストレスはディスクのラジアルチルト(R−tilt),タンジェンシャルチルト(T−tilt),フォーカスずれ(AF),光ヘッドのビームエキスパンダの操作による球面収差(SA),および記録パワーの変化(Pw)である。ラジアルチルトに関してはL2層の結果も示してある。図に見られるように,ビットエラー率とSbERの相関は非常に良好でありことが判る。ビットエラー率が10―5付近において,バラツキが大きい原因は主に試作媒体の欠陥の影響である。
【0027】
これらの実験とシミュレーションの結果から、33GB/面の記録容量を実現するような高密度記録再生条件においては、ビットエラーとして、エッジシフト(ハミング距離1)だけでなく、少なくとも2Tの連続数2(ハミング距離3)までのエラーの評価をする必があることが判る。特に、エッジシフトだけに注目して再生信号の品質を評価する方法では、ビットエラー率やSbERとの相関が十分とは言えない。
【0028】
次に高密度化に伴うユークリッド距離差の分布について説明する。ここで扱うユークリッド距離差とは、再生信号と誤目標信号とのユークリッド距離から再生信号と正目標信号とのユークリッド距離を減算した値であって、特許文献1では|Pa−Pb|、特許文献3および4ではD値として定義されたものである。また、ここでは理想的な記録状態を考察するために、前述のシミュレーションを用いた。SNRを24dBとし、記録密度を25から36GB/面相当の範囲(T=74.5nm〜51.7nm)で変化させて、2Tの連続数が2までのユークリッド距離差の分布を求めた。再生信号処理系の構成は前述の通りである。結果を図5に示す。この分布はSAM分布と呼ばれることもある。前述のように、PR(1,2,2,2,1)方式においては、エッジシフトの理想ユークリッド距離=14、2Tシフトおよび2個連続2Tがシフトする場合の理想ユークリッド距離=12、と異なるので、これらをまとめて表示するために、各ユークリッド距離差は理想ユークリッド距離で割って規格化して表示してある。同図において、距離差がゼロ(左側の端)または負になる場合の統計的な確率がビットエラー率に相当するものである。図に見られるように、記録密度の向上によって同じSNRであっても分布の広がりが大きくなることが判る。これは、記録密度を向上に対応して、エラー率が増加することを示すものであって、リーズナブルな結果となっている。一方、各分布の平均値(ピーク値と概略等しい)について注目すると、エッジシフトの場合には1(=理想ユークリッド距離)の近傍で一定となっている。しかしながら、連続する2Tがシフトする場合においては、2Tの連続数が1個、2個と増加するのに従って、かつ記録密度が向上するのに従って、ピーク値が、ゼロに近づく方向へと移動していくことが判る。この現象の理由は、自動等化器の処理能力に依存したものと考えることができる。前述のように、自動等化器は再生信号と正目標信号のRMS誤差を最小にするように動作するものである。一方、そのサンプリング間隔は1Tで有限な値であるため、サンプリング定理によって、サンプリング周波数の1/2までの範囲での離散的な周波数特性演算ができるだけである。このように、自動等化器で得られるフィルター特性には限りがあるため、再生信号の中に含まれる2Tの連続数が大きなパターン区間では再生信号の高域の周波数成分が大きくなり、結果として自動等化器の処理能力の限界に近づくため、理想ユークリッド距離からのずれが大きくなるものと考えることができる。後述するように、記録密度の向上によってユークリッド距離差の分布ピーク値(または平均値)が理想ユークリッド距離よりも小さい側へシフトする現象は、記録条件の調整技術に関して非常に重要な事柄である。上に示した公知文献の中にはこの現象に関する記載はないことを付記しておく。
【0029】
以上の実験とシミュレーションの結果に基づいて、前述の2つの要求性能の観点から、従来技術とそれらの組み合わせから類推される技術の課題についてまとめる。
(1)非特許文献2に記載の方法
非特許文献2では、特許文献1に記載の技術に基づいて、エッジシフトに注目して、ユークリッド距離差の分布の平均値が、理想ユークリッド距離となるように調整する技術が記載されている。「非特許文献2の式(1)」では、特定のエッジのシフト量MDは以下として定義される。
【0030】
【数1】
【0031】
ここで、Xは再生信号のレベル、PAおよびPBはそれぞれ2値化されたビット列(最も確からしい状態遷移列)に対する目標信号レベルおよび1ビットエッジシフトしたビット列(2番目に確からしい状態遷移列)に対応する目標信号レベルであり、dminはエッジシフトに対応する理想ユークリッド距離である。図5に示した結果に従って補足すると、本方法はエッジシフトの分布が理想ユークリッド距離(=1)になるように、記録条件を調整することに対応する方法である。一方、図3では高密度記録条件下においてエッジシフトだけに注目した場合、SbER(またはビットエラー率)との相関が十分でないことを示した。この結果から、エッジシフトだけに注目する本方法は、高密度記録条件では、上の要求性能(1)に照らして十分ではないことが判る。また、「非特許文献2のTable 2」では2Tが2個連続する箇所、すなわち、先行スペースが2Tの場合の2Tマークの前エッジ(Tsfp(2s、2m))、および後続するスペースが2Tの場合の2Tマークの後エッジ(Telp(2s,2m))において、調整指標が存在しないことが示されており、この点に関しても、図2に示した結果に鑑みて、2Tのエラーが大きい高密度記録条件の場合に本方法を適応するには十分でないと言える。
(2)特許文献2に記載の方法
特許文献2に記載の方法も、エッジシフトだけに注目して記録調整の指標を得る方法であるが、仮想的な1Tマークやスペースを導入することによって、2Tが2個連続する箇所についても、記録調整が可能である。しかしながら、上と同様に、エッジシフトのみに注目することから、SbER(またはビットエラー率)との相関が良好とは言えないため、本方法も要求性能(1)に照らして十分ではないことが判る。
(3)特許文献5に記載の方法
特許文献5に記載の方法は、誤ビット列についてもラン長制限を満たすように選択しているため、エッジシフトだけでなく2Tが連続してシフトするケースについても、指標とSbER(またはビットエラー率)との相関に優れた方法である。本方法では「特許文献5の図3」に示されるように、2Tマークを含む記録条件を調整するために、注目するマークエッジが左側にシフトする場合と右側にシフトする場合とで、評価する誤ビット列と正ビット列とのハミング距離が異なる。例えば、非特許文献2の表記に従って、Tsfp(3s、2m)について見てみると、記載されるビット列は以下である。
【0032】
【表1】
【0033】
PR(1,2,2,2,1)方式について考えると、左シフトビット列の場合は、正ビット列とのハミング距離が1、ユークリッド距離が14である。右シフトビット列の場合は、正ビット列とのハミング距離が2、ユークリッド距離が12となる。図5に示した結果に見られるように、ハミング距離が異なると、それぞれの分布の平均と標準偏差の値が異なってしまう。特許文献5では、この課題に対応するため、SbERの概念を導入し、それぞれのエラー確率を誤差関数を用いて推定し、両者のエラー確率が等しくなる条件を調整目標としている。本方法に従えば、SbER(またはビットエラー率)を最小とするような記録条件を定めることが可能であると考えられる。一方、前述のように図5に示したシミュレーション結果は、記録マークが理想的な状態(エッジシフト=0)で形成された場合の結果である。図5に見られるように、ハミング距離の違いに応じて、中心値と標準偏差が異なっている。したがって、特許文献5に記載の方法に従えば、3つの分布のエラー確率(ユークリッド距離差が0以下になる確率)を等しくするように、記録マークの形成条件をずらす必要がある。前述のディスク互換性の保証に関する要求性能(2)に照らして、この方法が高密度光ディスクの記録条件の調整方法として理想的なものであるかどうかについては疑問が残る。この点について、定量的な考察をするために、前述のシミュレーションを用いて検討を行った。
【0034】
特許文献5の方法によって検出されるエッジシフト量を定義するため、概念の拡張を行った。「特許文献5の式(13)」によって、エッジシフト相当量Ecは、
【0035】
【数2】
【0036】
と定義される。ここで、M2,M3およびσ2、σ3はそれぞれ、注目するエッジが左右に1ビットシフトした場合のユークリッド距離差の分布の平均および標準偏差である。前述のように2つの分布を理想ユークリッド距離で規格化して図5の結果を得た。同様にして理想ユークリッド距離が1Tに相当すると考え、M2,M3およびσ2、σ3をそれぞれ理想ユークリッド距離で規格化して用いれば、エッジシフト相当量Ecから時間軸方向のエッジシフトEc’を算出することができる。
【0037】
図6はシミュレーションで求めた分布を示しており、「特許文献5の図6」に摸式的に示されるものと同様な結果が得られていることが判る。SNRを変化させた場合の、Ec’の値について調べた結果を図7に示す。図に見られるように、SNRの変化に応じてEc’の値が大きく変化することが判る。光ディスク装置では、個体ごとに、あるいは温度等の環境条件に応じて、光スポットの形状や光電変換アンプのSNRが変化する。ハードディスク装置のように、ディスク媒体が交換できないストレージ・デバイスであれば、当該ドライブ装置においてSbER(またはビットエラー率)が最小になるように、記録条件を調整することが最良の方法である。しかしながら、光ディスクのように、媒体可換なストレージ・システムにおいて、当該ドライブのみのSbER(またはビットエラー率)が最小となるだけでは、不十分であると言える。前述の要求性能(2)に鑑みて、本方法が高密度記録条件下での記録条件の調整方法として改善の余地があると言える。
【0038】
さらに、本方法に関して、要求性能(1)に照らして改善の余地があることについても説明する。Tsfp(3s、2m)の評価に用いるビット列は前述のとおりである。一方、特許文献4に記載されているとおり、次の評価ビット列もSbERの算出に用いられる。
【0039】
【表2】
【0040】
これは、注目する2Tマークに後続するスペースが2Tの場合である。左シフトビット列に関しては、前述と同様に正ビット列とのハミング距離1、ユークリッド距離14である。一方、右シフトビット列の場合は、正ビット列とのハミング距離3、ユークリッド距離12となっており、前述のものとハミング距離が異なる。要求性能(1)によって、記録調整用の評価指標と再生信号品質の評価指標SbER(またはビットエラー率)との相関が十分に大きいことが望まれる。したがって、記録調整用の評価指標においても、評価ビット列が再生信号品質の評価指標に準じたものとなる必要がある。注目するエッジが左右にエッジシフトした目標信号を用いる評価指標において、この例のように、左シフトがハミング距離1、右シフトがハミング距離2、3と複数の組み合わせが生じる点に関して、特許文献5には解決手段に関する記載がなかった。この点に関しても、本方法には改善の余地があると言える。
(4)従来技術の組み合わせによる方法
非特許文献2では、特許文献1に記載の技術に基づいて、エッジシフトに注目して、ユークリッド距離差の分布の平均値が、理想ユークリッド距離となるように調整する技術が記載されている。これを「特許文献5の図3」に示される評価ビット列に適応して、各分布の平均値が理想ユークリッド距離となるように調整する方法が容易に類推される。しかしながら、図5に示したように、記録密度を高めると各分布の平均値が理想ユークリッド距離から小さくなる方向にずれてしまう。同様にSNRに応じても各分布の平均値は変化する。図8この現象を実験的に確かめた結果を示すものである。これは、前述の試作3層ディスクのL0において、再生パワーを変化させながら再生実験を実施して得た実験結果である。図の横軸は再生パワー1.2mWを100%として表したものである。再生信号振幅は再生パワーに比例するが光検出器のノイズ(アンプノイズ)は一定であるため、本実験は、再生パワーを変化させることによって再生信号のSNRを変化させた結果である。図に見られるように、各分布の平均値は理想ユークリッド距離(=1)よりも小さく、かつ再生パワーが小さくなるのに応じて小さくなることが判る。この方法についても、ドライブ装置の状態によるSNRの違いが、記録調整に用いる指標に影響してしまうことは明らかである。
(5)SbERを最小とする方法
図4に示したように、33GB/面の実験においてSbERはビットエラー率と良好な相関を示す。したがって、記録調整のための評価指標を用いずに、記録条件の全ての組み合わせに対して、記録再生を行い最小のSbERが得られる条件を選択する方法が考えられる。しかしながら、光ディスク媒体のように、記録調整用の領域(試し書きエリア)の大きさが限られている場合、無作為に記録条件を変化させながら、SbERが最小になる条件を検索することは実質的に不可能である。なぜなら、記録するマークのエッジを理想
的な状態に近づけるための方向に対する情報を得ることができないためである。上に示した従来の技術のように、記録パルスの各パラメータに応じて、それぞれ独立に目標値からのずれを定量化できる方法でなければ、光ディスク装置に応用して試し書きを実施可能な方法とはならない。また、ディスクの試作を繰り返しながら、その性能向上を図るような場合においても、短時間で記録条件の調整が完了することが望まれる。この意味においても、前述の要求性能(1)と(2)を満たし、かつ記録パラメータに応じてそれぞれ独立に調整が可能となる新規な記録調整のための指標とその調整方法が望まれていた。
【0041】
次に,従来のBDの記録ストラテジを用いて,記録容量が30GB以上の高密度光ディスクにおいて良好な記録品質を得るための課題を記録パルスの観点から述べる。
【0042】
図44は,4Tマークに対応するパルス列のラストパルスの時間幅TLPを変化させながら光ディスク媒体にランダムデータを記録し,当該箇所の再生信号波形に基づいて4Tマークの後エッジのエッジシフトの値を測定した結果である。ここで,記録ストラテジとして従来のBDのN−1記録ストラテジを用い,TLPの調整単位をチャネルビット周期の1/16とした。TLPに関しては,後続スペース長による分類は行わず,全ての4Tマーク記録パルスに対して一律の値を指定した。また,エッジシフトとして,特許文献2に開示されたV−SEATのエッジシフトを用いた。本実験の条件は,前述の試作ディスクを用いた実験における条件と同様である。
【0043】
図44によると,従来のBDの記録ストラテジを用いた場合,ラストパルス終了位置を1単位(チャネルビット周期の1/16)変化させるとエッジシフトは約16ポイント変化する。良好な記録品質を得るためにはエッジシフトの値が±5%以内であることが望ましいが,従来のBDの記録ストラテジを用いた場合のエッジシフト変化率では,エッジシフトの値を常に±5%以内に収めることは困難である。
【0044】
従来のBDの記録パルス波形を用いた場合に記録マークの後エッジのエッジシフト変化率が大きくなるのは,記録マークの後エッジの形成に関するパラメータとして,ラストパルスの時間幅TLPだけしかないため,ラストパルスの終了位置を変化させると,ラストパルスの時間幅も変化するからである。すなわち,ラストパルスの時間幅が変化することにより記録マークの後エッジ形成部に注入される熱エネルギーが大きく変化するため,エッジシフトの変化率が大きくなると考えられる。
【0045】
記録容量が30GB以上の高密度光ディスクでは,ディスクに記録されるデータのビット長が従来のBDより小さくなるため,前後マークを記録するときの熱の影響をより受けやすくなる。このため,高密度光ディスクに用いる記録パルスには,従来のBDより高精度に記録マークのエッジ位置を制御できることが求められる。
【0046】
この課題に対して,記録パルスの調整単位をチャネルビット周期の1/16より小さい単位,例えばチャネルビット周期の1/32にすることも考えられるが,その場合,ディスクのコントロール情報領域に格納すべきパルスパラメータのデータ量が増加してしまうため,記録パルスの調整単位はチャネルビット周期の1/16のままで,記録マークの後エッジ位置を高精度に制御できることが望ましい。
【0047】
以上のように,BDシステムに基づいて容量が30GB/面以上となるような高密度記録条件に対応する記録条件の調整に関して、従来の技術では調整性能と媒体互換性の保証の両立という点に関して十分とは言えないという課題があった。本発明で解決しようとする課題は,これらの課題を解決する新規な記録調整用の評価指標と方法を提供すること、およびそれを用いた光ディスク装置の提供である。また,記録パルス調整単位がチャネルビット周期の1/16である条件においても,マークのエッジ位置を高精度に制御できる記録方法の提供である。
【課題を解決するための手段】
【0048】
本発明ではBDシステムを基本として,30GB以上の大容量化を図ることを目指しているため,以下,変調符号の最短ラン長は2Tを前提として説明を進める。また、前述のように、実験結果から2Tの連続数が2までを扱うSbERは良好にビットエラー率と一致するため、再生信号品質の評価の指標としてSbERを前提として,本発明による記録調整用の評価指標について説明する。SbERと同様に,目標信号と再生信号のユークリッド距離に基づいて統計的に再生信号品質を評価する指標や,ビットエラー率を直接評価する指標等ならば,本発明によって記録条件を調整方法した結果は,良好な結果が得られる。
【0049】
前述の課題を整理すると以下のようになる。
(課題1)調整結果に基づいて記録したデータの再生互換性について
SNRの変化に依存せずに調整目標点が一定となる評価指標と調整方法である必要がある。
(課題2)調整結果に基づいて記録したデータの品質について
SbERが十分に小さいことを保証するためには、少なくとも連続する2Tの数が2個までの評価ビット列が、SbERの評価ビット列と一致、もしくは実質的に一致する必要がある。
(課題3)短時間での記録調整の実現に関して
記録パルスの条件,もしくは適応型記録パルスの各パラメータに対応して、それぞれ独立に評価可能な評価指標と調整方法である必要がある。
(課題4)マークの後エッジ位置制御の高精度化に関して
記録パルス調整単位がチャネルビット周期の1/16という条件下においても,マークの後エッジ位置を高精度に制御する必要がある。
【0050】
本発明の課題解決手段を構成する基本的な概念は,2つの目標信号と再生信号とのユークリッド距離の差に従う評価指標において,着目するエッジのシフトに対応する成分とSNRに依存する成分を分離して評価を行うことにある。本発明の理解を容易にするため,初めにこれらの課題を満足する評価指標の定義を示し、その後、課題を満足していることを示すことにする。
【0051】
以下、再生信号をW、再生信号から得られた2値化ビット列の目標信号をT、2値化ビット列の注目するエッジを1ビット左にシフトさせ、かつラン長制限を満たすビット列の目標信号をL、2値化ビット列の注目するエッジを1ビット右にシフトさせ、かつラン長制限を満たすビット列の目標信号をRとする。W,T,R,L間のユークリッド距離をED(W,T)、ED(W,R)のように表すことにする。注目するエッジが左方向にシフトする誤りについての評価値をxL、右方向にシフトする誤りについての評価値をxRとして、これら等価エッジシフトと呼び以下で定義する。
【0052】
【数3】
【0053】
【数4】
【0054】
注目するエッジのエッジシフト量を拡張エッジシフトDと呼び、以下で定義する。
【0055】
【数5】
【0056】
注目するエッジのエラー確率に相当する補正量をSNRファクタSと呼び、以下で定義する。
【0057】
【数6】
【0058】
注目するエッジとマーク長と先行(もしくは後続)するスペース長が同じ、すなわち同いつの記録パルス条件にて記録されるエッジの集団について、記録調整に用いるエッジシフト量をDの統計平均値Δとして、以下で定義する。
【0059】
【数7】
【0060】
ただし、Nは測定したエッジの総数、Dnはn番目のエッジの拡張エッジシフトである。
【0061】
さらに、注目するエッジのエラー確率に相当するジッタ値をσとして、以下で定義する。
【0062】
【数8】
【0063】
ただし、Snはn番目のエッジのSNRファクタである。
【0064】
(式D1)から(式D6)によって定義される本発明の評価指標を以下,L−SEAT(run-length-Limited Sequence Error for Adaptive Target)と呼び,(式D5)に定義したΔをL−SEATシフト,(式D6)に定義したσをL−SEATジッタと呼ぶ。本発明の記録条件の調整方法は,記録パルスの条件を変化させながら記録再生を行い、対応するエッジに関してL−SEATシフトの絶対値およびL−SEATジッタの値が最小となるような記録パルスの条件を選択することである。
【0065】
以下、本発明の記録条件の調整方法が前述の(課題1)から(課題3)を満足することを説明する。特許文献1から5にあるように,PRML方式においてエラーマージンは,ユークリッド距離差で表される。以下,説明の簡略のために,注目するエッジが左右にシフトするエラーに関するユークリッド距離差を理想ユークリッド距離で規格化した値とそれぞれ、dEDL、dEDRを以下のように定義しておく。
【0066】
【数9】
【0067】
【数10】
【0068】
(課題1)調整結果に基づいて記録したデータの再生互換性について
前述のように,記録調整用の評価指標ではSNRの変化に依存せずにエッジシフトの評価指標が一定である必要がある。各ユークリッド距離差の分布はSNRに応じて平均値が変化する。W,T,L,Rは複数の時刻t(t=t0+1,t0+2,t0+3,t0+4,t0+5)に対する信号レベルであるので、これを多次元空間の座標として考えてみる。簡単のため、ハミング距離1の右シフト誤りついて考えると、PR(1,2,2,2,1)方式では、T(T1,T2,T3,T4,T5)、W(T1+δ1,T2+δ2,T3+δ3,T4+δ4,T5+δ5)、R(T1+1,T2+2,T3+2,T4+2,T5+1)とすることができる。さらに、この5次元空間の原点をTとする座標系を考えると、W,Rの位置ベクトル(=座標)を改めてW,Rとすると、W(δ1,δ2,δ3,δ4,δ5)、R(1,2,2,2,1)となる。T,L,Rを含む平面におけるこれらの関係を摸式的に図9に示す。図においてx軸は線分TRの方向に取っており、点Rが1となるように規格化している。また、y軸はx軸に直行する方向としているため、Wの値によってy軸は変化するものであって一定の方向を示すものではないことに注意されたい。W,T,Rに関するユークリッド距離には以下の関係がある。
【0069】
【数11】
【0070】
すなわち、TからWへのユークリッド距離とRからWへのユークリッド距離の合計は、TからRへのユークリッド距離に必ずしも一致しない。
【0071】
図9では物理的に記録されたマークのエッジシフトの測定についても摸式的に示している。この場合目標値T(原点)から測定した記録マークのエッジまでの距離をxとしたとき、1Tだけ右にシフトした目標値Rから記録マークのエッジまでの距離は(1−x)となり、両者の合計は必ず1(=1T、Tは検出窓幅)となる。記録パルスによるエッジ制御は一般的に時間方向へのシフト制御であって、こうした物理的に記録されたマークのエッジシフトに関する線形な測定の概念に沿ったものとなっている。
【0072】
そこで、PRMLにおけるユークリッド距離(線分の長さの2乗値)の定義においても、ベクトルTWのx軸上への写像成分をxRとすれば、ベクトルRWのx軸上への写像成分は(1−xR)となって、両者の和を1とすることができる。xRはベクトルTRとベクトルTWの内積値として、T,R,W間のユークリッド距離を用いて、以下のように算出することができる。
【0073】
【数12】
【0074】
これが(式D2)に定義した等価エッジシフトxRの意味である。等価エッジシフトの算出はハミング距離が2や3の場合にも同様にして算出することができる。(式6)の第2項は、図5に示したユークリッド距離差を理想ユークリッド距離で規格化したものである。xRはWのTR方向への成分値であると同時にPRMLのエラー確率に関する項を含んでいるものである。自然な拡張によって,左側にシフトした目標Lを用いて(式D1)により等価エッジシフトxLを算出することができる。
【0075】
一方、SNRの値に応じてWの座標が変化するため、等価エッジシフトの値は測定するエッジごとに変化する。しかしながら、前述のように等価エッジシフトはTR線分上で線形加算が成り立つため、その平均値を求めることで、SNRに依存せずに記録マークのエッジシフトを評価することが可能となる。
【0076】
次に、SNRに応じてユークリッド距離差の平均値が変化する課題への対応方法を示す。前述のように、この現象の要因は自動等化器によって得られるフィルターの周波数特性がサンプリング定理によって制限されることによって発生するものと考えられる。従って、注目するエッジに対して、それが左右にシフトした場合に現れる平均値の変化は等しい。図5に示したように、分布の平均値の変化は連続する2Tの数、すなわちハミング距離ごとに分類できることからも推察される。規格化したユークリッド距離差dEDL、dEDRの平均値をそれぞれML、MR、これらの理想ユークリッド距離からのずれをdM、測定すべきエッジシフト量をΔ2とすればとすれば、以下の関係が成立する。
【0077】
【数13】
【0078】
【数14】
【0079】
一方、特許文献2で開示されたV−SEATではエッジシフト(ハミング距離1)だけに着目して規格化シーケンス誤差を算出し、左右シフトに対応した符号を付与して加算平均をする技術を開示している。例えば、右方向の等価エッジシフトを正とし、左方向の透過エッジシフトを負とすることが自然である。これを応用し、注目するエッジについて、左右の等価エッジシフトを算出し、シフト方向に対応した符号を加味して加算平均したものを評価値とすれば、SNRに依存したユークリッド距離差の分布の平均値の変化dMを相殺することができる。
【0080】
【数15】
【0081】
同様にして、注目する1つのエッジに関する測定値として、(式D3)で定義される拡張エッジシフトDについても、これがSNRに依存した影響を取り除いたエッジシフトの評価値であることが判る。(式D5)で定義されるL−SEATエッジシフトΔは、(式9)で定義されるそれぞれの分布の平均値の差Δ2と統計的に等価である。
【0082】
図10はL,Rを目標信号として等価エッジシフトxL,xRを示した摸式図である。図ではLとRの1時刻分のずれを考慮して、t(t=t0,t0+1,t0+2,t0+3,t0+4,t0+5)の6次元に対するL,R、Wの座標をTを原点として表している。物理的に記録されたマークのエッジシフトxは、1T右側の点Rからの距離(=1−x)、と1T左側の点Lからの距離(=1+x)を用いて、x={(1−x)+(1+x)}/2で求められる。(式9)は、これと計量を意味している。一方、W,T,L,R間のユークリッド距離に関しては、L,Rに時刻ずれがあることから、線分TRと線分TLは幾何的な直線上には乗らない。両者のなす角度θは2つのベクトルの内積を用いて求められ、図のように両者がエッジシフト(ハミング距離1)のエラーである場合、cosθは以下となる。
【0083】
【数16】
【0084】
ここで、vector(T,L)、vector(T,R)はそれぞれ、L,Rの位置ベクトル、”・”演算子は内積を表している。Tが最も確からしい目標信号であり、LとTがそれぞれ2番目に確からしい(最もエラー確率の高い)目標信号であるならば、PRML方式におけるエラー率の観点から、拡張エッジシフトDをゼロにするように記録条件を調整することがリーズナブルであると言える。2つの目標信号が幾何的な直線上には乗らないことは、PRML方式におけるエッジシフト測定の特徴であるとも言える。2Tの繰り返し数が2(ハミング距離1,2,3)について、L,Rとcosθの関係を図11にまとめる。図において、Lのハミング距離が1でRのハミング距離が3の場合、cosθ>0となって、幾何的にはLとRのなす角が90度未満となるが、LとRとして最もエラー確率の高い目標信号を選択するならば、拡張エッジシフトDの平均値Δまたは、L、R分布の平均値の差分Δ2によって注目するエッジのシフトを測定できる。
【0085】
図12はdEDLとdEDRの関係を示すシミュレーション結果である。シミュレーション条件は前述の通りで、33GB/面に相当する記録密度で所定の長さの記録マークが理想的に記録された場合についての結果である。ここではSNRを20dBとした。図では記録マークの前エッジについて(a)Tsfp(2s、2m),(b)Tsfp(2s、3m),(c)Tsfp(3s、2m),および(d)Tsfp(3s、3m)の4つの場合について各1000エッジの結果を示している。ここでは、LとRの目標信号として、ハミング距離がそれぞれ(a)(2、2)、(b)(2,1)と(3,1)、(c)(1,2)と(1,3)、および(d)(1,1)となるものを用いた。図中の破線はdEDL+dEDR=2、すなわち図10に示した物理的な記録マークに関する計測値の保存関係と等価な関係を示している。図に見られるように、各プロット点は概ね破線に沿った相関関係を示しており、ノイズの影響による再生信号の変動が、概ね左シフトと右シフトに関して対称であることが判る。詳しく見ると図12(b)、(c)に見られるように、左右の目標信号のハミング距離が等しくない場合は、破線とは少し異なる傾きをもった分布であることが判る。これは、PRML方式によるエラー発生の確率が左右のシフトで異なることに対応したものであって、物理的な記録マークに関する計測と、PRML方式のエラーマージンに沿った計測の差異である。特許文献2で開示されたV−SEATによるエッジシフトの評価は、目標信号としてハミング距離1のものだけを利用しているので、図12(b)、(c)の場合にも破線に沿った関係の計測のみしか実施できない。従って、本発明は従来技術に比べて、左右のエッジシフトに応じたエラー率の相違をより精度良く検出することが可能となる。これが、本発明による第1の効果である。
【0086】
図13はdEDLとdEDRの平均値と拡張エッジシフトDの関係を示すシミュレーション結果である。シミュレーション条件は図12と同一である。ここでも、(a)Tsfp(2s、2m),(b)Tsfp(2s、3m),(c)Tsfp(3s、2m),および(d)Tsfp(3s、3m)の4つの場合について各1000エッジの結果を示している。図中、dEDLとdEDRの平均値の分布が(1)エッジパターンごとに広がりが大きく異なる点、および(2)理想ユークリッド距離差=1よりも小さい側にシフトしている点は図5の結果を反映したものである。これとは対照的に、拡張エッジシフトDの分布はエッジパターンに依らず、(1)分布の広がりがほぼ均一であり、かつ(2)分布の中心がほぼゼロにある。図中では、これらの違いを摸式的な分布形状で表している。拡張エッジシフトDの導入によって得られるこの2つの効果は、それぞれ(1)等価エッジシフトによって再生信号のシフトをベクトルTRまたはベクトルTLとの内積値として算出して線形化している点、および(2)左右の等価エッジシフトを符号を付加して平均化している点、による効果である。
【0087】
以上、本発明による効果をまとめたものを図14に示す。同図は図7に示したEc’(特許文献5の方法)とSNRの関係に、(式D5)に定義した拡張エッジシフトの平均値Δを加えたものである。光ディスク装置は可搬媒体を扱う装置であるため、不特定多数の媒体に対して同様な記録条件で記録を行える必要がある。しかしながら、実際に記録される情報のSNRは、光ディスク装置の動作環境や機械のコンディションによって変動する。従来の方法の場合、図14に見られるように、Ec’値がSNRの変化に応じて大きく変化しており、これは、理想的な記録信号と、実際に記録媒体に記録される記録信号との差(図14では、エッジシフト量を指標として評価している)が、光ディスク装置の動作コンディション(SNR)に応じて変動することを意味する。一方、本発明のΔ値はSNRの変化に依存せずにほぼゼロで一定であり、これは、光ディスクの動作コンディションが変動しても、同じ条件で記録ができていることを意味する。前述のように、本シミュレーションでは、所定の長さの記録マークが理想的に記録された場合の信号にランダム雑音を加えたものであり、この条件に対して、エッジシフトの評価値Δがほぼゼロであるという計測結果は、記録したデータの再生互換性の観点からも非常に優れたものである。この点が,本発明による第2の効果である。
【0088】
(課題2)調整結果に基づいて記録したデータの品質について
本発明による記録条件の調整の結果、SbERが十分に小さい必要がある。これを実現するためには、記録パルスの調整によってdEDLとdEDRが最小になり,かつT、L、Rの評価ビット列とSbERの評価ビット列が実質的に等価である必要がある。
【0089】
最初に前者に対して説明する。目標信号T,L,Rはハミング距離の差異と時刻ずれによって,幾何的な直線上に乗らないことは前述のとおりである。これによって,等価エッジシフトの絶対値は左右のシフトに対して異なる。この点は本発明によるエッジシフト計測の特徴である。さて,N個のエッジを評価したとき,n番目のエッジのdEDLとdEDRの値をdEDLnとdEDRnとして,それらの平均を1と近時したとき,標準偏差σL,σRは次式で表される。
【0090】
【数17】
【0091】
【数18】
【0092】
ビットエラー率はこれらの合成標準偏差σLRによって評価される。従って,
【0093】
【数19】
【0094】
となり,右辺が(式D6)に示したL−SEATジッタの2倍の値となる。ここに表れる係数2は本質的なものではなく,dEDLおよびdEDRの分布においてエラーマージンが1(理想ユークリッド距離=1)であるのに対して,L−SEATでは従来のタイム・インターバル・アナライザによるジッタ測定と同様に,エラーマージンが±1/2Tであることによって生じた係数である。両者をガウス分布としたときの誤差関数によるエラー率の値は等しくなる。L−SEATジッタは,図5に示したユークリッド距離差の分布をそれぞれ,平均値が1となるようにして重ね合わせた場合の合成標準偏差を表していることが判る。従って,L−SEATジッタはSbERやビットエラー率に対して良好な相関をもつ評価指標であると言える。さらに詳しく言うと,(式D4)に見られるように,SNRファクタは定義によって,SNRや記録密度によってユークリッド距離差の分布が理想値1からずれた量と同じ値を平均値としてもつ。従って,(式D6)に定義したL−SEATジッタにおけるSNRファクタの寄与は,ユークリッド距離差の分布の平均値のずれを加味したものとなっている。以上のように,本発明のL−SEATでは,注目するエッジのシフトに対応する成分(拡張エッジシフト)とSNRに依存する成分(SNRファクタ)を分離して評価を行うことができる。これによって,個別のドライブ装置のSNRに依存しない再生互換性能に優れたシフト調整と,SbERやビットエラー率の最小条件の保証という2つの機能を同時に提供することができるのである。すなわち、本発明のL−SEATは、特許文献2で開示されたV−SEATを含む従来の記録調整用の信号評価指標に比較して、ジッタやSbERなど、従来の再生信号品質の評価指標との相関性を有しており、信号評価指標として優れたものである。よって、本発明により、従来にない優れた信号評価指標が提供され、これが本発明によって得られる第3の効果である。この点に関する実験的な検証については,実験結果を交えて後述する。
【0095】
次に,SbER等の再生信号の品質の評価を行うために用いる評価ビット列との親和性について説明する。特許文献1、3、4等に記載される再生信号の評価技術は,それぞれ構成が異なるが,共通技術として,PRMLデコーダから出力される2値化ビット列の中から最も確からしい第1の評価ビット列を検索・抽出する工程が含まれている。評価ビット列の長さMはPRML方式の拘束長Nと,評価ビット列に含まれる2Tパターンの連続数N2Tを用いて,M=2N−1+2N2Tと一般化することが可能である。ここでN2Tは0,1,2,...となる整数である。N2T=0,1,2は,前述の表記に従えば,それぞれエッジシフト,2Tシフト,2T玉突きシフトに対応するものである。また,N2Tが0,1,2,3,4,5および6のとき,ハミング距離はそれぞれ1,2,3,4,5,6および7であって,パターンAとパターンBの評価ビット列の間のハミング距離は(N2T+1)となる。評価ビット列は2Mとおりのビット列の中から,最も確からしい第1の評価ビット列と第1の評価ビット列の目標信号からのユークリッド距離が最小となる目標信号に対応する第2の評価ビット列との関係を抽出する機械的な操作によって,容易に列挙することができる。
【0096】
図15は,拘束長5のPR(1,2,2,2,1)方式に対応した評価ビット列の例であり,同様なものは特許文献4に記載されている。図に見られるように,拘束長5のPRML方式を用い,PRMLデコーダ2値化ビット列の中から評価ビット列を検索・抽出して再生信号の品質評価を実施する場合,ハミング距離ごとに18組で合計54組,すなわち108個の評価ビット列が列挙される。再生信号の評価を行う場合、これらの評価ビット列の検索・抽出処理を並行して実施する必要がある。
【0097】
図16は図15に示した拘束長5のPR(1,2,2,2,1)に対応した評価ビット列から共通項を抽出し整理したものである。図に見られるように,ハミング距離1,2,3に応じた108個の評価ビット列は,それぞれビット長5,7,9の主ビット列と,その両端に付加された2ビットの副ビット列XX,YYによって表現することができる。ここで,主ビット列は、ハミング距離1の場合,「00011」,「00111」,「11100」,および「11000」の4個,ハミング距離2の場合,「0001100」,「0011000」,「1110011」,および「1100111」の4個,ハミング距離3の場合,「000110011」,「001100111」,「111001100」,および「110011000」の4個であり,副ビット列AAは「00」,「10」,もしくは「11」であり,副ビット列BBは「00」,「01」,もしくは「11」である。ここに定義した主ビット列の区間が目標信号と再生信号のユークリッド距離の算出区間となる。副ビット列は主ビット列の端部での目標信号レベルを算出するためだけに必要なものであって、複数の目標信号の間のユークリッド距離には係わらないものである。その意味で、副ビット列は目標信号の端部のレベルを定めるための境界条件を定めるものと考えることができる。
【0098】
主ビット列はPRML方式の拘束長に依存せずに定まるものである。この理由を説明する。最短ラン長mが2Tの場合,エッジシフトによって1ビットが変化することを表現するためにビット列の最短長は最短ラン長を2倍して1を加えた値,すなわち2m+1=5ビットである。これが主ビット列の実体である。同様にして,評価ビット列に含まれる連続する2Tの数N2Tを用いて一般化すると,主ビット列の長さは(2m+1+2N2T)となる。このように,主ビット列とは,評価ビット列に含まれる連続する2Tの数に応じて定まる,最短のビット列という意味をもつ。一方,前述のように,再生信号とのユークリッド距離の算出に必要なビット列の長は,PRML方式の拘束長Nを用いて,(2N-1+2N2T)である。両者のビット列の長の差は(2N-1+2N2T)−(2m+1+2N2T)=2(Nm−1)となって,これが必ず偶数であることが判る。最短ラン長m=2の場合,この値は2(N−3)である。
【0099】
以上のように,PRML方式の拘束長Nに依存しない主ビット列と,主ビット列の両端に付加された長さ(N−3)の副ビット列を用いれば,評価ビット列を整理して表現することが可能である。
【0100】
このように,評価ビット列を整理して記述するとことで、再生信号品質の評価指標と本発明の関係の簡素化が可能になると共に、本発明においても回路規模の削減を図ることができるようになる。
【0101】
図16では特許文献4の記載内容に従って、評価ビット列をA、Bの組として記述した。再生信号を2値化して得られたビット列の中から第1の評価ビット列(目標信号Tに相当する評価ビット列)を検索し、これから2番目に確からしい第2の評価ビット列(目標信号LまたはRに相当する評価ビット列)を生成して用いる方が、回路規模の削減の点で有利である。第1と第2の評価ビット列のハミング距離は予め定められるので、ハミング距離と同じ数の”1”をもつビット列を生成ビット列として、排他的論理和(XOR)演算によって、第1の評価ビット列(T)からに施すことによって、第2の評価ビット列を生成できる。図17はハミング距離が1から7までに対応した主ビット列をまとめたものである。図中,主ビット列(Main bit array)の欄には,上に示した主ビット列を列挙してある。ここでは、主ビット列にハミング距離と1から4までの数の組み合わせの主ビット列番号を定めて整理した。図に示すように、第2の主ビット列を生成するための操作は、ハミング距離ごとに定まった生成ビット列をXOR演算して求めることができる。第2の主ビット列の主ビット列番号についても表記してある。
【0102】
以上のように,主ビット列に関して考察すればSbERを評価ビット列と本発明の方法による評価ビット列との親和性を説明することができる。
【0103】
まず,連続する2Tの数が2以下の場合について,本発明によるエッジ評価の主ビット列を列挙したテーブルを図18に示す。L−SEATでL,R目標を同時に生成する場合、主ビット列の長さは前述のものよりも1Tずつ長くなっており,ハミング距離1,2,3に対してそれぞれ6,7,8である。ここでは,図17と同様に,再生信号を2値化して得られるビット列に含まれる主ビット列と,これにXOR演算をしてそれぞれL,R用の主ビットを生成するための生成ビット列を列挙した。主ビット列の総数は12であり,各主ビット列の中で下線で示したビットが注目するエッジを表している。ここで採用した主ビット列とL,Rに関する選択ルールは,注目するエッジを左右に1ビットシフトされるとともに,ラン長制限を満たし,かつハミング距離が最小(ビット反転数が最小)となるような目標をL,Rとして選択するというものである。また,記録マークを“1”,スペースを“0”として記述した。記録マークからの反射光量がスペースに比較して小さい,所謂High To Low型の媒体の場合,PRクラスを(1,2,2,2,1)とするならば,記録マークを“0”,スペースを“1”とするように,主ビット列の“1”と“0”を反転すればよい。あるいは,PRクラスを(−1,−2,−2,−2,−1)として,インパルス応答の向きを反転すれば,図18をそのまま用いることができる。以下,本発明の説明では,特に指定しない限り記録マークを“1”,スペースを“0”として扱う。
【0104】
以下,N2Tの最大値が2の場合について,図17に示したSbER算出の主ビット列と図18に示したL−SEATの評価主ビット列の関係について説明する。図19はN2T=0,すなわちハミング距離が1の場合の両者の比較である。これは3T以上のマークの前エッジに関する評価である。SbERについては,評価する時刻tを,L−SEATについては,エッジの種別を付記してある。図に見られるように,主ビット列に含まれるエッジは1つである。SbERとL−SEAT共にエッジ当たり2つのハミング距離に対する評価を行っており,主ビット列は同一である。すなわち副ビット列を含む両者の評価ビット列は一致している。図では前エッジについてのみ示しているが,“1”と“0”を反転すれば後エッジとして扱うことができ,その場合にも評価ビット列の一致は自明である。
【0105】
図20はN2T=1,すなわちハミング距離が2の場合の両者の比較である。主ビット列に含まれるエッジは2つである。SbERとL−SEAT共にエッジ当たり2つのハミング距離に対する評価を行っており,主ビット列は同一である。時刻に対する評価の遷移を見ると,図中に破線矢印で示すように,SbERの場合L,L,R,Rの順に評価を行い,L−SEATはL,R,L,Rの順に評価を行うことが判る。主ビット列に含まれる“1”と“0”を反転したパターンについても同様に,評価ビット列は一致する。
【0106】
図21はN2T=2,すなわちハミング距離が3の場合の両者の比較である。主ビット列に含まれるエッジは3つである。上の例と同様に,SbERとL−SEAT共にエッジ当たり2つのハミング距離に対する評価を行っており,主ビット列は同一である。時刻に対する評価の遷移を見ると,図中に破線矢印で示すように,SbERの場合L,L,L,R,R,Rの順に評価を行い,L−SEATはL,R,L,R,L,Rの順に評価を行う。主ビット列に含まれる“1”と“0”を反転したパターンについても同様に,評価ビット列は一致する。
【0107】
以上の検討から,N2Tが2以下の場合,SbER算出のための評価ビット列と,図18に示した評価主ビット列が一致することが判った。同様にして,N2Tが3以上の場合についても,L−SEAT算出用の主ビット列として,SbERと最大値が同一になるようなハミング距離までの主ビット列に対して,ラン長制限を満たし,かつハミング距離を最小とする主ビット列をL,Rの主ビット列として選択することによって,同様に評価主ビット列が一致するようにできる。N2Tが3の場合の具体例については後述する。L−SEATの基本概念は、図5に示したようにユークリッド距離差の分布の平均値が理想ハミング距離の差と異なる場合に、対称性に着目して評価するエッジを左右にシフトさせた目標信号を用いて、それらの分布の平均値の差分からエッジシフトを評価するものである。この概念に従って、各時刻において拡張エッジシフトを評価する方法((式D1)から(式D6))、もしくは独立に算出したユークリッド距離差の分布の平均値を評価する方法((式7)から(式13))によって、エッジシフトを評価するものである。また、評価主ビット列は図18に示したものに限らず、N2Tが3の場合を含めた種々のバリエーションを用いることができる。
【0108】
以上のように,図18に示した評価主ビット列に対して、等価エッジシフトに基づく評価を実施することによって,評価主ビット列の親和性の観点からもSbERやそれに概念の共通する指標との相関性を向上した評価指標としてL−SEATを提供することができる。この点は本発明における第4の改善点である。
【0109】
(課題3)短時間での記録調整の実現に関して
記録パルスの条件,もしくは適応型記録パルスの各パラメータに対応して、それぞれ独立に評価可能な評価指標と調整方法を提供する必要がある。一般の光ディスク装置としては,単一の規格だけに対応するだけでなく,CD,DVD,BD,あるいはBDを基本とした高密度の光ディスクについても,同様に対応する必要がる。これらの規格に応じて,適応型記録パルスはそれぞれ異なるものである。また,記録調整のための評価指標としても,タイム・インターバル・アナライザーで測定する時間軸方向のエッジシフトおよびジッター,V−SEAT,本発明のL−SEAT等,それぞれに適したものを使うことが望まれる。これを実現するためには,先ず,記録調整用のパラメータ・テーブルとして選択すればよい。その上で,再生信号の各エッジごとにそのエッジシフトやSNRファクタのような評価値を算出する回路を前段に配置することによって,包括的な対応が可能になる。こうした,記録条件の調整用の回路のブロック構成の例を図22に示す。図において,光ディスク媒体から再生され,図示しないアナログフィルター処理を施された再生信号51はA/D変換器21によって6から8ビットのデジタル・データに変換され,自動等化器22によって等化された後PRMLデコーダ23によって2値化され,2値化ビット列52が出力される。記録条件調整用の信号品質の評価回路30はエッジ品質評価回路40,41,42,とセレクタ60,及び記録パルス品質評価テーブル35,およびタイミング調整器36から構成される。エッジ品質評価回路40はエッジごとにCD/DVD用の時間軸方向のエッジシフトの評価を行い,エッジ品質評価回路41はBD用にV−SEATの評価を行い,エッジ品質評価回路42は高密度BD用にL−SEATの評価を行う。各エッジ品質評価回路ではエッジごとにエッジシフト量,あるいは拡張エッジシフトやSNRファクタの算出を行う。セレクタ60では記録再生を行うディスクの種別に対応して,エッジ品質評価回路の出力を選択する。記録パルス品質評価テーブル35では,2値化ビット列52と,エッジ品質評価回路から出力されたエッジの評価指標を同期して,適応型記録パルスに応じたパターンの仕分けを行い,4x4テーブル等に分離して,各テーブル要素ごとに平均値や標準偏差の算出を行う。CPU140ではこの結果を参照しながら,適応型記録パルスの各パラメータの調整処理を実施する。以上の構成によって,複数の光ディスク媒体に対応した適応型記録パルスのパラメータ調整が可能になる。こうした構成によって,複数の適応型記録パルスのパラメータを並列して調整することが可能となり,単一の再生信号品質の評価指標を用いた方法に比較して,短時間の内に,かつ限られた試し書き領域を用いて記録パルスの条件調整が実施できる。
【0110】
(課題4)マークの後エッジ位置制御の高精度化に関して
次に,記録容量が30GB以上の高密度光ディスクに対して,記録パルスの調整単位がチャネルビット周期の1/16という条件下においても,記録マークのエッジ位置を高精度に制御するための手段について説明する。
【0111】
従来のBDの記録パルスでは,ラストパルスの幅を変化させることによりラストパルスの終了位置を変化させていたため,マークの後エッジ形成部分への熱エネルギーの注入量が変化するため,ラストパルスの終了位置の変化に対するマーク終端位置の変化率が大きくなることが課題であった。
【0112】
そこで本発明では,ラストパルス開始位置を指定するパラメータdTLPを導入した。図45は,従来のBDの記録ストラテジに本発明のdTLPを追加した記録パルス波形を示した図である。dTLPは,記録データのNRZIチャネルビット信号を基準として図45に示したように定義される。
【0113】
TLPを固定した状態でdTLPを変化させると,ラストパルスの幅を変化させることなくラストパルスの位置を変化させることができる。この場合,記録マークの後エッジ形成部への熱エネルギーの注入量の変化が小さいため,ラストパルス終了位置の変化に対するマークの後エッジ位置の変化率を小さくすることができる。なお,この方法により記録マークの後エッジ位置が変化するのは,ラストパルス直前のギャップの大きさが変化することにより,マーク終端形成部分における最大到達温度が変化するためであると考えられる。
【0114】
図46は,本発明において導入したラストパルス開始位置dTLPのパラメータテーブルを示した図である。dTLPの値は,記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の合計3×4通り分類して指定される。
【0115】
次にラストパルス開始位置を指定するパラメータdTLPを導入した効果を示す。図47は,図44に示した実験と同様に4Tマークに対応するラストパルス終了位置を変化させながら、4Tマークの後エッジのエッジシフトを測定した結果である。ここでは,ラストパルス終了位置は2種類の方法で変化させ,それぞれ結果をプロットした。1つは,従来のBDの記録パルスに基づき,ラストパルス開始位置を固定した状態でラストパルス幅TLPのみを変化させることによりラストパルス終了位置を変化させたものであり,もう1つは,本発明の記録パルスに基づき,ラストパルス幅TLPを固定した状態でラストパルス開始位置dTLPを変化させることによりラストパルス終了位置を変化させたものである。ラストパルス終了位置の調整単位はチャネルビット周期の1/16とした。使用した追記型光ディスク試料や記録再生条件等の実験条件は上述の実験の場合と同様である。ここでは,4Tマーク記録パルス列のラストパルスの時間幅TLPを,後続スペース長によらず一律に変化させた。また,このときのTLPの値の調整単位は従来のBDに従いチャネルビット周期の1/16とした。
【0116】
図47によると,従来のBDの記録パルス(TLP制御)を用いてラストパルス終了位置を変化させた場合には,ラストパルス終了位置を1単位変化させたときの記録マークの後エッジのエッジシフトの変化は約16ポイントであったのにたいして,本発明の記録パルス(dTLP制御)を用いた場合は6ポイントであった。従って,本発明のdTLPを用いることによりエッジシフトの値を,前述した良好な記録品質の目安である±5%以内に常に収めることができるはずである。
【0117】
以上のように,BDシステムに基づいて容量が30GB/面以上となるような高密度記録条件に対応する記録条件の調整に関して、前述の従来の技術の課題を解決し,(1)調整結果に基づいて記録したデータの再生互換性に優れ,(2)調整結果に基づいて記録したデータの品質がSbER等の再生信号の評価指標で測定して十分に良好な結果を保証し,(3)適応型記録パルスの条件調整を短時間で実施可能で,かつ(4)マークの後エッジ位置を高精度に制御可能な記録条件の調整のための評価指標と調整方法,およびこれを用いた光ディスク装置の提供ができるようになった。
【0118】
本発明の骨子は、BDのように最短ラン長が2Tの符号を用いた光ディスクにおいて、3種以上のハミング距離(N2T=0,1,2に対応)に対する目標信号を用いて、再生信号を評価する方法において、着目するエッジの品質の評価を各時刻において拡張エッジシフトを評価する方法、もしくは独立に算出したユークリッド距離差の分布の平均値を評価する方法によって評価し、これに基づいて記録条件を調整する方法とこの方法を実装した光ディスク装置である。
【発明の効果】
【0119】
以上のように,本発明のL−SEATを評価指標とする記録条件の調整方法によって,BDにおいて30GB相当以上の高密度記録を実現する光ディスク装置を提供することができるようになった。
【図面の簡単な説明】
【0120】
【図1】本発明の光ディスク装置を実現するための再生信号評価回路の構成を示すブロック図。
【図2】試作した3層構成の追記型光ディスク試料を用いて測定した記録パワーとビットエラー数の関係をまとめた実験結果。
【図3】SNRとSbERの関係をまとめたシミュレーション結果。
【図4】ビットエラー率とSbERの関係を表す実験結果。
【図5】記録容量とユークリッド距離差の分布の関係。
【図6】シミュレーションで求めたTsfp(3s,2m)の評価に用いるユークリッド距離差の分布。
【図7】SNRとEc’の関係。
【図8】再生パワーと分布中心ずれの関係。
【図9】等価エッジシフトを表す摸式図。
【図10】等価エッジシフトを表す摸式図。
【図11】ハミング距離とcosθの関係。
【図12】dEDLとdEDRの関係。
【図13】dEDLとdEDRの平均値と拡張エッジシフトDの関係。
【図14】SNRとEc’および拡張エッジシフトDの平均値の関係。
【図15】PR(1,2,2,2,1)対応評価ビット列テーブル。
【図16】特徴抽出したPR(1,2,2,2,1)対応評価ビット列テーブル。
【図17】主ビット列と第2の主ビット列生成操作テーブル。
【図18】評価主ビット列(N2Tmax=2)。
【図19】評価主ビット列の比較。
【図20】評価主ビット列の比較。
【図21】評価主ビット列の比較。
【図22】評価回路のブロック図。
【図23】評価主ビット列(N2Tmax=3)。
【図24】評価主ビット列(N2Tmax=2)の別の実施例。
【図25】評価主ビット列(N2Tmax=3)の別の実施例。
【図26】評価主ビット列と記録パルステーブルの対応を示す図。
【図27】評価主ビット列と記録パルステーブルの対応を示す図。
【図28】L−SEATによるエッジシフト評価を示す図。
【図29】L−SEATによるエッジシフト評価を示す別の図。
【図30】L−SEAT分布とSAM分布。
【図31】再生パワーとL−SEAT評価指標の関係。
【図32】対称型自動等化器の構成を示すブロック図。
【図33】L−SEATによる記録調整の実験結果。
【図34】L−SEATによる記録調整の実験結果。
【図35】L−SEATによる記録調整の実験結果。
【図36】L−SEATによる記録調整の実験結果。
【図37】記録調整後のパワーマージンを示す図。
【図38】ビットエラー率とジッタの関係を示す図。
【図39】記録パルスの調整方法を示す摸式図。
【図40】本発明の記録調整方法のフローチャート。
【図41】本発明の評価方法を用いたフォーカス調整方法を示す図。
【図42】光ディスク装置の構成を示す模式図。
【図43】従来のBDの記録パルス波形を示す図。
【図44】従来のBDの記録パルスを用いた場合のラストパルス終了位置と記録マークの後エッジのエッジシフトの関係を示す図。
【図45】本発明の記録パルス波形を示す図。
【図46】本発明のラストパルス開始位置dTLPのパラメータテーブルを示す図。
【図47】本発明の記録パルスを用いた場合のラストパルス終了位置と記録マークの後エッジのエッジシフトの関係を示す図。
【図48】本発明の記録パルス調整方法のフローチャート。
【発明を実施するための形態】
【実施例1】
【0121】
以下、図面を参照して本発明による記録条件の調整方法および光ディスク装置について実施形態を説明する。
【0122】
図23は本発明によるエッジ評価主ビット列を列挙したテーブルの別の実施例である。ここではN2Tが3の場合を示した。主ビット列の総数は20であり,各主ビット列の中で下線で示したビットが注目するエッジを表している。主ビット列No.1−12は図18に示したものと共通であり、主ビット列No.13−20が2Tの連続数が3の場合に対応したものである。前述のように、図15および図16に示したSbERでは、2番目に確からしい評価ビット列は1つであるため、2値化されたビット列が"0000011001100"のように連続する2Tが3つの場合についても、ハミング距離が3である"0000110011000"を2番目に確からしい評価ビット列として再生信号の品質を評価する。一方、図15に示した評価主ビット列ではこれを評価しない。記録密度とディスク媒体の条件によって、こうしたビット列を独立して評価する必要がある場合、すなわち2Tの連続数が2の場合と3の場合とて、記録する2Tマークのエッジシフトの差異が無視できない場合には、回路規模は増大するが図23の評価主ビット列を用いることが必要となる。また、図23の評価主ビット列を用いることによって、主ビット列No.15と17に見られるように、Tsfp(2s,2m)に先行するマークが3T以上の場合(No.15)と2Tの場合(No.17)を分離して評価することができるようになる。記録パルスとして、記録するマークに先行するスペースだけでなく、さらに先行するマークの長に応じた適応型記録パルスを用いる場合にも、図23の評価主ビット列によって、記録パルスのテーブルに1対1に対応した記録調整のための情報を得ることができる。評価主ビット列に含まれる2Tの連続数(N2T)については、こうした状況を判断して適切なものを用いればよい。SbERの算出の評価ビット列との関係は、前述のN2T=2の場合と同様に1:1対応の関係にある。N2Tが4以上の場合については、冗長なため説明しないが図18と図23の関係から、光ディスク技術に係る一般の技術者であれば容易に拡張することができるはずである。
【0123】
図24は本発明によるエッジ評価主ビット列を列挙したテーブルの別の実施例である。ここではN2Tが2の場合について、L,Rのハミング距離を等しくした場合を示す。主ビット列の総数は12であり,各主ビット列の中で下線で示したビットが注目するエッジを表している。図18との差異は、L,R用の主ビットを生成するための生成ビット列とハミング距離である。図18の評価主ビット列と用いると、SbERの評価ビット列との1:1の対応関係は得られないが、SNRに対する分布のずれを原理的に相殺することができるため、図14に示したSNR依存性よりも、良好なSNRの依存性(原理的に一定)を得ることができる。ドライブ装置や媒体の環境変化によるSNRの変化に対する配慮を第1優先にする場合には、こうした評価主ビット列を用いればよい。
【0124】
図25は本発明によるエッジ評価主ビット列を列挙したテーブルの別の実施例である。ここではN2Tが3の場合について、L,Rのハミング距離を等しくした場合を示す。図23に対するテーブルの特徴と評価性能は、図24の説明と同様であり、良好なSNRの依存性(原理的に一定)を得ることができる。
【0125】
図26と図27は評価主ビット列と記録パルステーブルの対応関係を示す実施例である。主ビット列番号とを列挙したテーブルの別の実施例である。図26は図18に示した評価主ビット列と、前後エッジ4x4テーブル型の記録パルスに1:1対応した評価テーブルである。図に見られるように例えば、Tsfp(2s,2m)の評価結果には主ビット列No.9の結果を用いればよい。このテーブルを参照して、ドライブ装置の記録調整用の回路を構成すれば、4x4テーブル型の記録パルスの各パラメータの調整にL−SEATを用いることができる。図27はこの場合の、L,Rのハミング距離をまとめたものである。このように、L−SEATによるエッジの評価結果は、記録パルスのパラメータテーブルに一致するように容易に展開可能である。これは、図23から図25に示した評価主ビット列についても同様に、記録パルスのパラメータテーブルに対応する評価を行うことができる。
【0126】
図28と図29記録パルスのパラメータテーブルに対応したL−SEATによるエッジ評価の一例を示すシミュレーション結果である。シミュレーション条件は前述と同じで、記録密度はBDにおける33GB/面相当、PRクラスは(1,2,2,2,1)である。ここでは、Tsfp(2s,2m)を+0.2Tシフト(右側へ0.2T移動)した場合のシミュレーション結果を示している。図28は、各時刻において拡張エッジシフトを評価する方法((式D1)から(式D6))を用いた場合である。図28(b)に見られるように、Tsfp(2s,2m)のエッジシフトを検出し、対応する分布が右側にシフトしていることが判る。記録パルスの各パラメータに対して、各々エッジシフトがゼロに近づくように調整することによって、良好な記録条件を得ることができる。図29は、独立に算出したユークリッド距離差の分布の平均値を評価する方法((式7)から(式13))を用いた場合である。ここでは、L,Rシフトとして、ハミング距離が共に2のものについてのシミュレーション結果を示している。図29(a)に見られるように、エッジシフトがゼロの場合、L,Rの分布の平均値は理想ユークリッド距離差(=1)とは異なるが、両者は誤差範囲で同じ平均値を持つ。一方、図29(a)に見られるように、エッジシフトがゼロでない場合には、L,Rの分布の平均値は逆方向に分離する。したがって、L,Rシフトの分布の平均値が一致するように記録パルスのパラメータを調整することによって、良好な記録条件を得ることができる。このように、L,Rの評価主ビット列のハミング距離が等しくなるようにすれば、対称性を利用してSNRに依存しないで記録条件の調整が実施できる。前述のように、L,Rの評価主ビット列として、ハミング距離が異なるものを用いることもできる。
【0127】
図29はシミュレーションによって求めたL−SEAT分布とSAM分布を比較したものである。シミュレーション条件は前述と同じで、記録密度はBDにおける33GB/面相当、PRクラスは(1,2,2,2,1)である。各SAM分布の平均値がSNRの低下に依存して、ゼロに近づくようにずれて行くのに対して、L−SEATの分布の平均値はゼロで、SNRに依存せずに一定であることが確かめられる。評価主ビット列として、N2Tが3以上の場合はこれの拡張形態であるので、同様な結果が得られる。
【0128】
図30はL−SEATのSNR依存性を実験的に確かめた結果である。これは、前述の試作3層ディスクのL0において、再生パワーを変化させながら再生実験を実施して得た結果であり、従来技術による図8の結果に対応したものである。図の横軸は再生パワー1.2mWを100%として表している。再生信号振幅は再生パワーに比例するが光検出器のノイズ(アンプノイズ)は一定であるため、本実験は、再生パワーを変化させることによって再生信号のSNRを変化させた結果である。L−SEAT指標は、図22に示した構成によって、記録マークの前後エッジに対してそれぞれ4x4のテーブルに仕分けして、シフトとジッタを評価した。図31(a)はL−SEATジッタの測定値であり、再生パワーの低下に依存してジッタが大きくなっているのはSNRの変化を反映したものである。一方、図31(b)はTsfp(2s、2m)についてのエッジシフトの評価結果を示すものである。再生パワー(SNR)に依存せず、エッジシフトの値が一定であることが判る。これはL−SEATによって、ユークリッド距離の差に基づくマージン評価指標をエッジシフトの成分とSNRに依存した成分に分離して評価を可能とする本発明の方法の特長である。これにより、本方法を用いればドライブ装置の個体差および環境条件の差異に基づくSNR変化に依存せずに、再生互換性の高い記録条件の調整が実施できることが確かめられた。
【0129】
ここで、記録調整に用いるのに好適な自動等化器について説明する。
【0130】
図32は本発明の対称型自動等化器の構成を示すブロック図である。前述のように、L−SEATを用いればSNRの変化に対して安定した記録パルスの調整を実施することができる。一方、実際のドライブ装置では、(1)ディスク媒体と光ヘッドの相対的な傾き角(タンジェンシャルチルト)角を主因とした光スポットの捜査方向の非対称性、および(2)自動等化器のタップ係数の非対称性に基づく再生信号の時間軸方向の非対称が存在する。これらの時間軸方向の再生信号のひずみは、エッジシフトとして検出されるため、再生互換に優れた記録条件の調整を実施する上での障害となりうる。例えば、記録マークにエッジシフトが残留する場合でも、自動等化器がそれを補償するように内部のタップ係数を非対称に学習してしまえば、測定されるエッジシフトが小さく良好な記録と判断される。一般に、ドライブメーカごと、あるいは機種ごとに再生系の構成は異なるものであるから、このような当該ドライブのみが再生しやすいようなデータを記録することは、媒体可換なストレージ・システムである光ディスクにおいては解決しなければならない課題である。ここに示した対称型自動等化器は解決手段を提供する。図において,図示しない光ディスク媒体から再生された再生信号51は図示しないA/D変換器によってデジタル・データに変換され,自動等化器22によって等化された後PRMLデコーダ23によって2値化され,2値化ビット列52が出力される。自動等化器の各タップ係数C0、C1、C2、…は2値化ビット列52に基づく目標信号と自動等化器22の出力信号のRMS誤差が最小になるように、自動的な学習処理が実施される。このアルゴリズムは一般的にLMS(Least Mean Square)法と呼ばれ、LMS回路62により実施される。本構成において、LMS回路によって更新されたタップ係数a0、a1、a2、…は一旦バッファ64に蓄えられ、FIRフィルタの実際の動作に用いるワークレジスタ65には、図示するように、時間軸方向に対称な位置のタップ係数(a0とaN−1の組み合わせ等)の間で平均化された値を設定するようにする。このような構成によって、自動等化器はタップ係数が対称化され、記録マークのエッジシフトを歪めて再生することを防ぐことができるようになる。また、光検出器に含まれるI−V変換アンプやその他のフィルターにも回路的な群遅延が残留する場合がある。必要に応じて、群遅延補償器61を実装することによって、こうした群遅延を低減することができる。群遅延補償器61は、所定の値の非対称なタップ係数をもつFIRを用いて実現することができる。さらに、本構成の回路を用いて、良好に記録されたリファレンスディスクを再生し、SbERもしくはL−SEATジッタ等が最小となるようにタンジェンシャルチルト量を調整することによって、光スポットの時間軸方向の非対称性を低減することが可能となる。こうした構成によって、自動等化器は再生信号の周波数特性の調整だけについて作用するようにすることができる。L−SEATに限らず、本構成による対称型自動等化器は、従来の記録調整方法と組み合わせても、再生互換性の高い記録条件を得ることができる。LMS回路62の結果を直接バッファ64に転送することは、セレクタ等の回路追加により実現できるため、本構成の対称型自動等化器を通常(対称型制限のない)の自動等化器として動作させることも容易である。
【0131】
以下の結果は、タップ数21の対称型自動等化器を用いた結果である。
【0132】
図33から図37はL−SEATを用いた記録パルスの条件調整の結果を示す実験データである。ここでは前述の試作3層ディスクのL0において、Tsfp(2s、2m)、Tsfp(3s、2m)、Tsfp(2s、3m)、Tsfp(3s、3m)の4つの記録パルスパラメータを変化させながら、L−SEATジッタ、L−SEATシフト、SbERを測定した結果である。SbERについては通常の再生と同様に自動等化器のタップ係数の対称型制限をしない状態で測定を行った。記録パルスのエッジの調整単位はT/64とし、記録再生の線速度はデータ転送レートがBDの2倍速相当となる条件とした。これらに見られるように、L−SEATシフトのゼロ点、およびL−SEATジッタおよびSbERのボトム条件はT/64のパルス幅以下の精度で一致することが判る。一般に、記録パルス幅の調整単位はT/16程度であるので、これらの結果からL−SEATシフトおよびL−SEATジッタを用いて、非常に良好な記録条件調整を実施することができることが確認できた。こうした調整を全ての記録パルスパラメータについて実施した結果、SbER値は3x10−3から1x10−7に改善した。図37は記録調整後の記録パワーとビットエラー率の測定結果である。約±10%と良好なパワーマージンを得ることができるようになった。
【0133】
図38はビットエラー率とL−SEATジッタの関係を示す実験結果である。ここでは記録パワー、デフォーカス、球面収差、ディスク媒体のタンジェンシャルチルトおよびラジアルチルトを変化させながら、L−SEATジッタおよびV−SEATジッタとビットエラー率の関係を測定した。図に見られるように、V−SEATに比較して、L−SEATの方がビットエラー率とジッタの相関が改善されていることが確かめられた。この理由は前述のとおりである。
【0134】
以上の実験とシミュレーションの結果に基づいて、本発明の記録条件の調整方法について図面を用いて説明する。
【0135】
図39は記録パルスの適応パラメータの調整方法を示す実施例である。ここでは、記録パルスの適応パラメータが4x4型テーブルの場合について示す。L−SEATによるエッジシフトとジッタの測定結果は前述のように4x4テーブルに仕分けする。このとき、記録パルスの条件を変更して光ディスク媒体に記録行い,当該個所を再生して対応するL−SEATのシフト値を評価し,これを最小にするように,記録パルスのパラメータを決定することによって、良好な記録パルスの条件を得ることができる。図33から図36の結果に見られるように、L−SEATのシフトだけでなくジッタの最小条件も含めて調整することによって、種々の変動に対して、より安定した調整結果を得ることができるようになる。この例からも明らかなように,記録パルスパラメータとその評価値が1対1に対応していることから,一度に複数の記録パルスパラメータを変更して記録/再生を行なうことで,同時に複数の記録パルスパラメータを並列に適正化することができる。これによって、ドライブ装置における試し書き時間を大幅に短縮することが可能になる。具体的には,記録パルスパラメータを順に1つずつ決定する方法では,2倍速のドライブ装置で処理時間が30秒から1分程度かかるのに対して,本方法を用いて並列処理を実施すると,約1秒で試し書きを終了することができるはずである。このした調整方法の場合、記録パルスの条件において固定した条件の部位があると安定した調整が実施できる。一般的には、Tsfp(5s、5m)とTelp(5s、5m)等の長マークの形成条件をこれに当てることが望ましい。
【0136】
図40は記録パルスの調整の全体の流れを示すフローチャートである。まず、ステップS101では、必要に応じて再生回路の群遅延をチェックし図32に示した再生回路の群遅延補正条件を決定する。次に、ステップS102では自動等化器の動作モードを対称型モードに設定する。ステップS103では、リファレンスデータ等を再生しながら、SbERやL−SEATジッタ等の再生評価指標が最良の状態になるように、デフォーカス量、球面収差補正量、ディスク媒体のチルト量を調整する。前述のように、タンジェンシャルチルトについては、複数のリファレンスデータを再生したり、記録感度が最良になる条件を加えたりして、特に配慮した調整を行う必要がある。ステップS104では5T以上のマーク・スペースからなる記録データを用いて、再生信号の対称性、S/N比、クロストーク量などを加味しながら、適正な基本パルスとパワー条件を定める。これによって4x4テーブルにおける長マークの記録条件Tsfp(5s、5m)とTelp(5s、5m)を固定する。Tsfp(5s、5m)は前エッジのパルス条件、Telp(5s,5m)は後エッジのパルス条件である。ステップS105とS106では、記録パルスの適応パラメータを調整しながら、残留するエッジシフトが所定の値(例えば±0.1%T)以下になるまで調整を行う。ステップS107では、得られた記録パルスに対して、SbERやビットエラー率のボトム値やパワーマージンを評価して、記録パルスの性能評価を実施して所定の性能が得られるかを判断し、不十分な場合には、ステップS104に戻って基本パルスとパワーを変化させて同様な調整を行う。こうした一連の流れによって、所定の性能が得られたならば、調整を終了する。
【0137】
図41はフォーカスオフセット量とSbERの関係を示す実験結果である。自動等化器は本発明の対称型自動等化器を用いた。こうした関係を利用して,SbERを最小にするようにすれば,適正なフォーカスオフセット値の調整を実現することができる。同じ方法は,ラジアルチルトやタンジェンシャルチルト,球面収差,種々の調整に応用することができる。こうした方法によって、図39のステップS103を実施することができる。
【0138】
次に,本発明において導入したラストパルス開始位置dTLPについての具体的な調整方法を説明する。
【0139】
L−SEATによるエッジシフトとジッタの測定結果は前述のように,マークの前エッジについては記録マーク長と先行スペース長の4x4,マークの後エッジについては記録マーク長と後続スペース長の4×4のテーブルにそれぞれ仕分けする。dTLPのパラメータについて,後エッジに関するL−SEATと同様に仕分けするが,2Tマークの記録パルスはラストパルスを持たないため,実際にはdTLPは記録マーク長について3種類(3T,4T及び5T以上),後続スペース長について(2T,3T,4T及び5T以上)の3×4のテーブルに仕分けする。
【0140】
このとき、3×4に仕分けされたdTLP個々の値を変更して光ディスク媒体に記録行い,当該個所を再生して対応するパターンのL−SEATのシフト値を評価し,それぞれのシフト値を最小にするように,個々のdTLPの値を決定することによって、良好な記録パルスの条件を得ることができる。ここで,シフト値を最小にするとは,シフト値の絶対値を最小にするという意味である。すなわち,上記の記録パルス調整方法は,L−SEATのそれぞれのシフト値が最もゼロに近づくように個々のdTLPの値を決定するというものである。
【0141】
図48はdTLPの調整の全体の流れを示すフローチャートである。調整開始時の前提として,前述の方法を用いて再生回路の群遅延補正条件の決定されており,自動等化器の動作モードは対称型モードに設定されているものとする。また,記録装置に対してdTLPの初期値が設定されているものとする。
【0142】
処理開始後,
ステップS201では、リファレンスデータ等を再生しながら、再生評価指標が最良の状態になるように、デフォーカス量、球面収差補正量、ディスク媒体のチルト量などを調整する。
ステップS202では,光ディスク媒体にデータにランダムデータを記録し,当該箇所を再生して再生信号波形を取得する。
ステップS203では,取得した再生信号波形に基づいてマークの後エッジについてのL−SEATのシフト値を上述のように3×4に分類して算出する。
ステップS204では算出したL−SEATのシフト値が,それぞれ最小であるかを判定し,結果が“No”のときには,ステップS205で,最小でないパターンのdTLPの値を更新する。このようにして,3×4の全てのパターンのL−SEATのシフト値がそれぞれ最小になるまで処理を繰り返し,処理を終了する。
【0143】
なお,dTLP以外の記録パルスパラメータにも,上記の調整フローを同様に適用することが可能である。
【0144】
以下,本発明の光ディスク装置に関する実施例を説明する。
【0145】
図1は本発明の光ディスク装置を実現するための再生信号評価回路の構成を示す実施例である。図において,光ディスク媒体から再生され,図示しないアナログフィルター処理を施された再生信号51はA/D変換器21によって6〜8ビットのデジタルデータに変換され,自動等化器22によって等化されたのちPRMLデコーダ23によって2値化され,2値化信号52が出力される。L−SEATを算出するための再生信号品質の評価回路30は主ビット判別回路31,評価ビット列生成回路32,ユークリッド距離計算回路33,記録パルス対応パターン仕分け器34、および評価値集計回路35によって構成される。主ビット列判別回路31には,所定の主ビット列のデータが格納されており,2値化信号52に主ビット列が含まれるかどうかを判定する。2値化信号52に主ビット列が含まれる場合,評価ビット列生成回路32は図18等に説明したXOR処理を実施して,LおよびRの評価ビット列を生成する。ユークリッド距離計算回路33では,T,L,Rの評価ビット列の目標信号と自動等化器22から出力される等化再生信号53との間のユークリッド距離を算出する。記録パルス対応パターン仕分け器34では、ユークリッド距離差の値を用い、各時刻において拡張エッジシフトを評価する方法((式D1)から(式D6))、もしくは独立に算出したユークリッド距離差の分布の平均値を評価する方法((式7)から(式13))に従い、記録パルスの適応テーブルに沿った形式でそれぞれの値を統計的に処理する。評価値集計回路35では図39等に示したテーブルを求める。CPU140はこれを参照すると共に、図示しない記録パルスの設定回路を制御して記録パルスのパラメータを変更し、図40に示した方法に従って、記録パルスの各パラメータを調整する。
【0146】
図42は,本発明の再生信号の評価方法を搭載した光ディスク装置の構成例を示す模式図である。装置に装着された光ディスク媒体100は,スピンドルモータ160により回転される。再生時には,CPU140によって指令された光強度になるようにレーザパワー/パルス制御器120が光ヘッド110内のレーザドライバ116を介して半導体レーザ112に流す電流を制御し,レーザ光114を発生させる。レーザ光114は対物レンズ111によって集光され,光スポット101を光ディスク媒体100上に形成する。この光スポット101からの反射光115は対物レンズ111を介して,光検出器113で検出される。光検出器は複数に分割された光検出素子から構成されている。再生信号処理回路130は,光ヘッド110で検出された信号を用いて,光ディスク媒体100上に記録された情報を再生する。本発明は図1に示した回路ブロックとして再生信号処理回路130に内蔵される。こうした構成によって,本発明の光ディスク装置は,30GB以上のBDを実現する装置として,試し書きによって記録パルスの条件を適正化し、良好なシステムマージンと再生互換性を確保することができる。
【産業上の利用可能性】
【0147】
本発明は,大容量光ディスクの記録条件の調整方法と光ディスク装置に関するものである。
【符号の説明】
【0148】
21 A/D変換器
22 自動等化器
23 PRMLデコーダ
30 再生信号の評価回路
31 主ビット列判別回路
32 評価ビット列生成回路
33 ユークリッド距離計算回路
34 記録パルス対応パターン仕分け器
35 評価値集計回路
51 再生信号
52 2値化信号
53 等化再生信号
100 光ディスク
101 光スポット
110 光ヘッド
111 対物レンズ
112 半導体レーザ
113 光検出器
114 レーザ光
115 反射光
116 レーザドライバ
120 レーザパワー/パルス制御器
130 再生信号処理器
140 CPU
160 スピンドルモータ
【特許請求の範囲】
【請求項1】
最短ラン長が2Tの符号を用いて情報の記録を行い、適応等化方式とPRML方式を用いて前記情報の再生を行う光ディスクにおける記録条件の調整方法であって、
前記適応等化方式として、タップ係数が時間軸に対応する方向に対して中心対称となるような制限を設けたものを用い、
前記光ディスクから得た再生信号波形を前記PRML方式によって2値化し、第1の2値化ビット列を得る工程と、
前記第1の2値化ビット列の中から、着目するエッジを左右に1Tシフトさせたビット列として最短ラン長が2T以上の第2及び第3の2値化ビット列を生成する工程と、
前記第1から第3の2値化ビット列に対応する第1から第3の目標信号波形を生成する工程と、
前記第2の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第1の値、および前記第3の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第2の値を算出する工程と、
前記第1の値と前記第2の値の差分値を用いて前記着目するエッジのシフト評価値を算出する工程と、
Nを整数として,長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,前記エッジシフト評価値が最小になるように,前記パルス列における最終のパルスであるラストパルスの開始位置を調整する工程とを有することを特徴とする記録条件の調整方法。
【請求項2】
前記再生信号波形に基づいて,前記記録マークの後エッジに対応する前記エッジシフト評価値を、記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の場合の4通りの合計3×4通りのパターンで分類して算出する工程と,
前記分類して算出したエッジシフト評価値のそれぞれが,最小であるか判定する工程と,
を有し,
前記分類して算出したエッジのシフト評価値がそれぞれ最小になるまでラストパルス開始位置を調整することを特徴とする請求項1記載の記録条件の調整方法。
【請求項3】
前記ラストパルス開始位置の調整単位はチャネルビット周期の1/16であることを特徴とする請求項2記載の記録条件の調整方法。
【請求項4】
前記第1の値として、これを前記第1の目標信号波形と前記第2の目標信号波形のユークリッド距離で規格化したものを用い、前記第2の値として、これを前記第1の目標信号波形と前記第3の目標信号波形のユークリッド距離で規格化したものを用い、
前記シフト評価値として、
前記第1の値と前記第2の値の差分値に基づく第1の評価値の平均値、
または、前記第1の値と前記第2の値の加算値に基づく前記第2の評価値の標準偏差と前記第1の評価値の標準偏差の2乗加算値、
または、前記第1の値の平均値と前記第2の値の平均値の差、
を用いることを特徴とする請求項1に記載の記録条件の調整方法。
【請求項5】
最短ラン長が2Tの符号を用いて光ディスク媒体へ情報の記録を行い、適応等化方式とPRML方式を用いて前記情報の再生を行う機能を有する光ディスク装置において、
前記適応等化方式として、タップ係数が時間軸に対応する方向に対して中心対称となるような制限を設ける手段と、
前記光ディスクから得た再生信号波形を前記PRML方式によって2値化し、第1の2値化ビット列を得る手段と、
前記第1の2値化ビット列の中から、着目するエッジを左右に1Tシフトさせたビット列として最短ラン長が2T以上の第2及び第3の2値化ビット列を生成する手段と、
前記第1から第3の2値化ビット列に対応する第1から第3の目標信号波形を生成する手段と、
前記第2の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第1の値、および前記第3の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第2の値を算出する手段と、
前記第1の値と前記第2の値の差分値を用いて、前記着目するエッジのシフト評価値を算出する手段と、
Nを整数として,長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,前記エッジシフト評価値が最小になるように,前記パルス列における最終のパルスであるラストパルスの開始位置を調整する手段とを有することを特徴とする光ディスク装置。
【請求項6】
前記再生信号波形に基づいて,前記記録マークの後エッジに対応する前記エッジシフト評価値を、記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の場合の4通りの合計3×4通りのパターンで分類して算出する手段と,
前記分類して算出したエッジシフト評価値のそれぞれが,最小であるか判定する手段とを有し,
前記分類して算出したエッジのシフト評価値がそれぞれ最小になるまでラストパルス開始位置を調整することを特徴とする請求項5記載の光ディスク装置。
【請求項7】
前記ラストパルス開始位置の調整単位はチャネルビット周期の1/16であることを特徴とする請求項6記載の光ディスク装置。
【請求項8】
最短ラン長が2Tの符号を用いて情報の記録を行い、適応等化方式とPRML方式を用いて前記情報の再生を行う光ディスクにおける記録条件の調整方法であって、
前記光ディスクから得た再生信号波形を前記PRML方式によって2値化し、第1の2値化ビット列を得る工程と、
前記第1の2値化ビット列の中から、着目するエッジを左右に1Tシフトさせたビット列として最短ラン長が2T以上の第2及び第3の2値化ビット列を生成する工程と、
前記第1から第3の2値化ビット列に対応する第1から第3の目標信号波形を生成する工程と、
前記第2の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第1の値、および前記第3の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第2の値を算出する工程と、
前記第1の値と前記第2の値の差分値を用いて前記着目するエッジのシフト評価値を算出する工程と、
Nを整数として,長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,前記エッジシフト評価値が最小になるように,前記パルス列における最終のパルスであるラストパルスの開始位置を調整する工程とを有することを特徴とする記録条件の調整方法。
【請求項9】
前記再生信号波形に基づいて,前記記録マークの後エッジに対応する前記エッジシフト評価値を、記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の場合の4通りの合計3×4通りのパターンで分類して算出する工程と,
前記分類して算出したエッジシフト評価値のそれぞれが,最小であるか判定する工程とを有し,
前記分類して算出したエッジのシフト評価値がそれぞれ最小になるまでラストパルス開始位置を調整することを特徴とする請求項8記載の記録条件の調整方法。
【請求項10】
前記ラストパルス開始位置の調整単位はチャネルビット周期の1/16であることを特徴とする請求項9記載の記録条件の調整方法。
【請求項11】
前記第1の値として、これを前記第1の目標信号波形と前記第2の目標信号波形のユークリッド距離で規格化したものを用い、前記第2の値として、これを前記第1の目標信号波形と前記第3の目標信号波形のユークリッド距離で規格化したものを用い、
前記シフト評価値として、
前記第1の値と前記第2の値の差分値に基づく第1の評価値の平均値、
または、前記第1の値と前記第2の値の加算値に基づく前記第2の評価値の標準偏差と前記第1の評価値の標準偏差の2乗加算値、
または、前記第1の値の平均値と前記第2の値の平均値の差、
を用いることを特徴とする請求項8に記載の記録条件の調整方法。
【請求項12】
適応等化方式として、タップ係数が時間軸に対応する方向に対して中心対称となるような制限を設けたものを用いる工程と、
光ディスクから得た再生信号波形をPRML方式によって2値化し、第1の2値化ビット列を得る工程と、
前記第1の2値化ビット列の中から、着目するエッジを左右に1Tシフトさせたビット列として最短ラン長が2T以上の第2及び第3の2値化ビット列を生成する工程と、
前記第1から第3の2値化ビット列に対応する第1から第3の目標信号波形を生成する工程と、
前記第2の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第1の値、および前記第3の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第2の値を算出する工程と、
前記第1の値と前記第2の値の差分値を用いて前記着目するエッジのシフト評価値を算出する工程と、
Nを整数として,長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,前記エッジシフト評価値が最小になるように,前記パルス列における最終のパルスであるラストパルスの開始位置を調整する工程と、
前記調整された記録条件に基づいて、最短ラン長が2Tの符号を用いて、情報の記録を行うことを特徴とする情報の記録方法。
【請求項13】
前記再生信号波形に基づいて,前記記録マークの後エッジに対応する前記エッジシフト評価値を、記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の場合の4通りの合計3×4通りのパターンで分類して算出する工程と,
前記分類して算出したエッジシフト評価値のそれぞれが,最小であるか判定する工程と,
を有し,
前記分類して算出したエッジのシフト評価値がそれぞれ最小になるまでラストパルス開始位置を調整することを特徴とする請求項12記載の情報の記録方法。
【請求項14】
前記ラストパルス開始位置の調整単位はチャネルビット周期の1/16であることを特徴とする請求項13記載の情報の記録方法。
【請求項15】
最短ラン長が2Tの符号を用いて情報の記録を行い、適応等化方式とPRML方式を用いて前記情報の再生を行う光ディスクにおける記録条件の調整方法であって、
前記適応等化方式として、タップ係数が時間軸に対応する方向に対して中心対称となるような制限を設けたものを用い、
所定の再生信号品質が得られるように,記録マークを形成するための記録パルス列における最終のパルスであるラストパルスの開始位置を調整することを特徴とする記録条件の調整方法。
【請求項1】
最短ラン長が2Tの符号を用いて情報の記録を行い、適応等化方式とPRML方式を用いて前記情報の再生を行う光ディスクにおける記録条件の調整方法であって、
前記適応等化方式として、タップ係数が時間軸に対応する方向に対して中心対称となるような制限を設けたものを用い、
前記光ディスクから得た再生信号波形を前記PRML方式によって2値化し、第1の2値化ビット列を得る工程と、
前記第1の2値化ビット列の中から、着目するエッジを左右に1Tシフトさせたビット列として最短ラン長が2T以上の第2及び第3の2値化ビット列を生成する工程と、
前記第1から第3の2値化ビット列に対応する第1から第3の目標信号波形を生成する工程と、
前記第2の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第1の値、および前記第3の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第2の値を算出する工程と、
前記第1の値と前記第2の値の差分値を用いて前記着目するエッジのシフト評価値を算出する工程と、
Nを整数として,長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,前記エッジシフト評価値が最小になるように,前記パルス列における最終のパルスであるラストパルスの開始位置を調整する工程とを有することを特徴とする記録条件の調整方法。
【請求項2】
前記再生信号波形に基づいて,前記記録マークの後エッジに対応する前記エッジシフト評価値を、記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の場合の4通りの合計3×4通りのパターンで分類して算出する工程と,
前記分類して算出したエッジシフト評価値のそれぞれが,最小であるか判定する工程と,
を有し,
前記分類して算出したエッジのシフト評価値がそれぞれ最小になるまでラストパルス開始位置を調整することを特徴とする請求項1記載の記録条件の調整方法。
【請求項3】
前記ラストパルス開始位置の調整単位はチャネルビット周期の1/16であることを特徴とする請求項2記載の記録条件の調整方法。
【請求項4】
前記第1の値として、これを前記第1の目標信号波形と前記第2の目標信号波形のユークリッド距離で規格化したものを用い、前記第2の値として、これを前記第1の目標信号波形と前記第3の目標信号波形のユークリッド距離で規格化したものを用い、
前記シフト評価値として、
前記第1の値と前記第2の値の差分値に基づく第1の評価値の平均値、
または、前記第1の値と前記第2の値の加算値に基づく前記第2の評価値の標準偏差と前記第1の評価値の標準偏差の2乗加算値、
または、前記第1の値の平均値と前記第2の値の平均値の差、
を用いることを特徴とする請求項1に記載の記録条件の調整方法。
【請求項5】
最短ラン長が2Tの符号を用いて光ディスク媒体へ情報の記録を行い、適応等化方式とPRML方式を用いて前記情報の再生を行う機能を有する光ディスク装置において、
前記適応等化方式として、タップ係数が時間軸に対応する方向に対して中心対称となるような制限を設ける手段と、
前記光ディスクから得た再生信号波形を前記PRML方式によって2値化し、第1の2値化ビット列を得る手段と、
前記第1の2値化ビット列の中から、着目するエッジを左右に1Tシフトさせたビット列として最短ラン長が2T以上の第2及び第3の2値化ビット列を生成する手段と、
前記第1から第3の2値化ビット列に対応する第1から第3の目標信号波形を生成する手段と、
前記第2の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第1の値、および前記第3の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第2の値を算出する手段と、
前記第1の値と前記第2の値の差分値を用いて、前記着目するエッジのシフト評価値を算出する手段と、
Nを整数として,長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,前記エッジシフト評価値が最小になるように,前記パルス列における最終のパルスであるラストパルスの開始位置を調整する手段とを有することを特徴とする光ディスク装置。
【請求項6】
前記再生信号波形に基づいて,前記記録マークの後エッジに対応する前記エッジシフト評価値を、記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の場合の4通りの合計3×4通りのパターンで分類して算出する手段と,
前記分類して算出したエッジシフト評価値のそれぞれが,最小であるか判定する手段とを有し,
前記分類して算出したエッジのシフト評価値がそれぞれ最小になるまでラストパルス開始位置を調整することを特徴とする請求項5記載の光ディスク装置。
【請求項7】
前記ラストパルス開始位置の調整単位はチャネルビット周期の1/16であることを特徴とする請求項6記載の光ディスク装置。
【請求項8】
最短ラン長が2Tの符号を用いて情報の記録を行い、適応等化方式とPRML方式を用いて前記情報の再生を行う光ディスクにおける記録条件の調整方法であって、
前記光ディスクから得た再生信号波形を前記PRML方式によって2値化し、第1の2値化ビット列を得る工程と、
前記第1の2値化ビット列の中から、着目するエッジを左右に1Tシフトさせたビット列として最短ラン長が2T以上の第2及び第3の2値化ビット列を生成する工程と、
前記第1から第3の2値化ビット列に対応する第1から第3の目標信号波形を生成する工程と、
前記第2の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第1の値、および前記第3の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第2の値を算出する工程と、
前記第1の値と前記第2の値の差分値を用いて前記着目するエッジのシフト評価値を算出する工程と、
Nを整数として,長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,前記エッジシフト評価値が最小になるように,前記パルス列における最終のパルスであるラストパルスの開始位置を調整する工程とを有することを特徴とする記録条件の調整方法。
【請求項9】
前記再生信号波形に基づいて,前記記録マークの後エッジに対応する前記エッジシフト評価値を、記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の場合の4通りの合計3×4通りのパターンで分類して算出する工程と,
前記分類して算出したエッジシフト評価値のそれぞれが,最小であるか判定する工程とを有し,
前記分類して算出したエッジのシフト評価値がそれぞれ最小になるまでラストパルス開始位置を調整することを特徴とする請求項8記載の記録条件の調整方法。
【請求項10】
前記ラストパルス開始位置の調整単位はチャネルビット周期の1/16であることを特徴とする請求項9記載の記録条件の調整方法。
【請求項11】
前記第1の値として、これを前記第1の目標信号波形と前記第2の目標信号波形のユークリッド距離で規格化したものを用い、前記第2の値として、これを前記第1の目標信号波形と前記第3の目標信号波形のユークリッド距離で規格化したものを用い、
前記シフト評価値として、
前記第1の値と前記第2の値の差分値に基づく第1の評価値の平均値、
または、前記第1の値と前記第2の値の加算値に基づく前記第2の評価値の標準偏差と前記第1の評価値の標準偏差の2乗加算値、
または、前記第1の値の平均値と前記第2の値の平均値の差、
を用いることを特徴とする請求項8に記載の記録条件の調整方法。
【請求項12】
適応等化方式として、タップ係数が時間軸に対応する方向に対して中心対称となるような制限を設けたものを用いる工程と、
光ディスクから得た再生信号波形をPRML方式によって2値化し、第1の2値化ビット列を得る工程と、
前記第1の2値化ビット列の中から、着目するエッジを左右に1Tシフトさせたビット列として最短ラン長が2T以上の第2及び第3の2値化ビット列を生成する工程と、
前記第1から第3の2値化ビット列に対応する第1から第3の目標信号波形を生成する工程と、
前記第2の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第1の値、および前記第3の目標信号波形と前記再生信号波形のユークリッド距離と前記第1の目標信号波形と前記再生信号波形のユークリッド距離の差に相当する第2の値を算出する工程と、
前記第1の値と前記第2の値の差分値を用いて前記着目するエッジのシフト評価値を算出する工程と、
Nを整数として,長さNTの記録マークを形成するために(N−1)本のパルスで構成されたパルス列を用い,前記エッジシフト評価値が最小になるように,前記パルス列における最終のパルスであるラストパルスの開始位置を調整する工程と、
前記調整された記録条件に基づいて、最短ラン長が2Tの符号を用いて、情報の記録を行うことを特徴とする情報の記録方法。
【請求項13】
前記再生信号波形に基づいて,前記記録マークの後エッジに対応する前記エッジシフト評価値を、記録マーク長が3T,4T及び5T以上の場合の3通り,後続スペース長が2T,3T,4T及び5T以上の場合の4通りの合計3×4通りのパターンで分類して算出する工程と,
前記分類して算出したエッジシフト評価値のそれぞれが,最小であるか判定する工程と,
を有し,
前記分類して算出したエッジのシフト評価値がそれぞれ最小になるまでラストパルス開始位置を調整することを特徴とする請求項12記載の情報の記録方法。
【請求項14】
前記ラストパルス開始位置の調整単位はチャネルビット周期の1/16であることを特徴とする請求項13記載の情報の記録方法。
【請求項15】
最短ラン長が2Tの符号を用いて情報の記録を行い、適応等化方式とPRML方式を用いて前記情報の再生を行う光ディスクにおける記録条件の調整方法であって、
前記適応等化方式として、タップ係数が時間軸に対応する方向に対して中心対称となるような制限を設けたものを用い、
所定の再生信号品質が得られるように,記録マークを形成するための記録パルス列における最終のパルスであるラストパルスの開始位置を調整することを特徴とする記録条件の調整方法。
【図1】

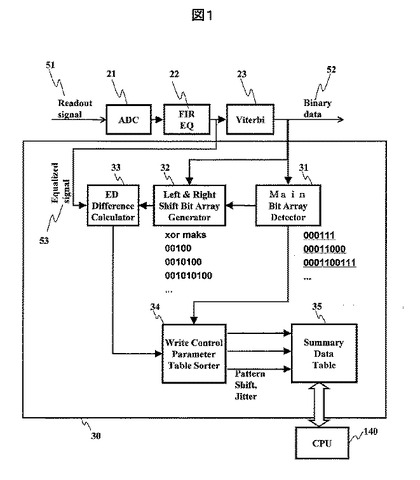
【図2】
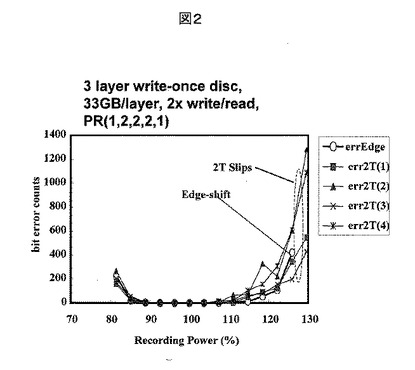
【図3】
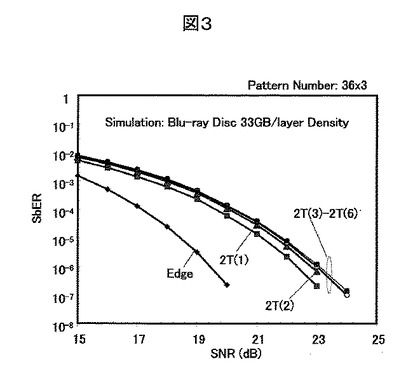
【図4】
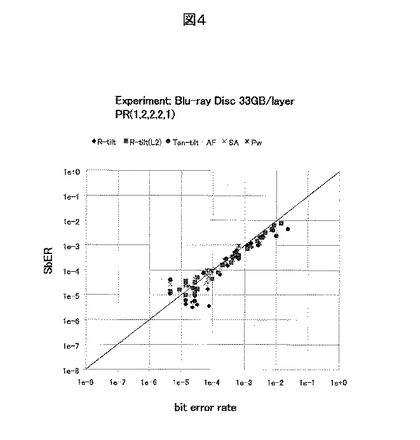
【図6】
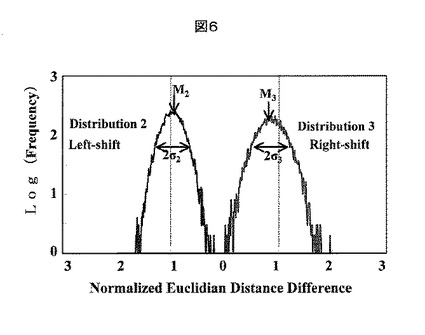
【図7】
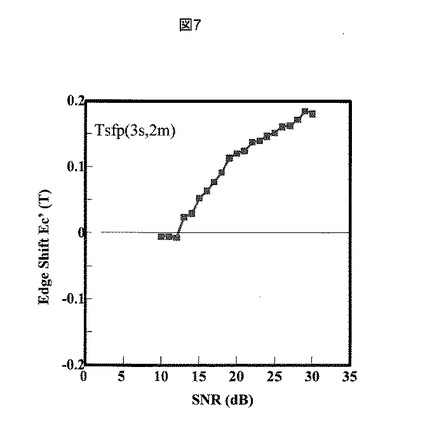
【図8】
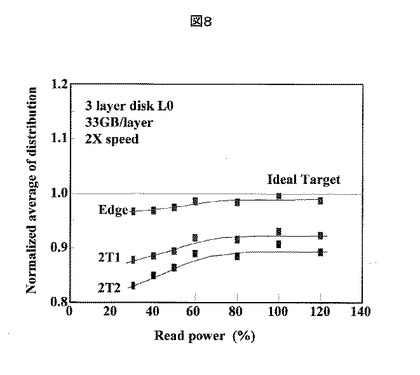
【図9】
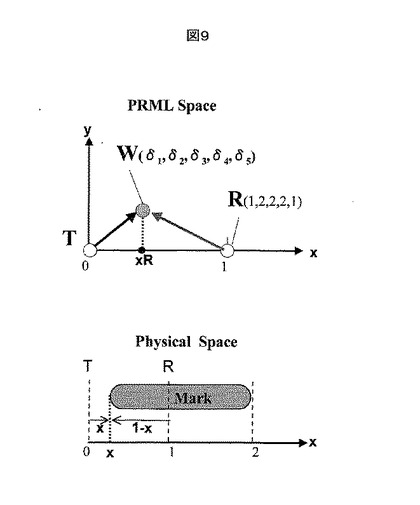
【図10】
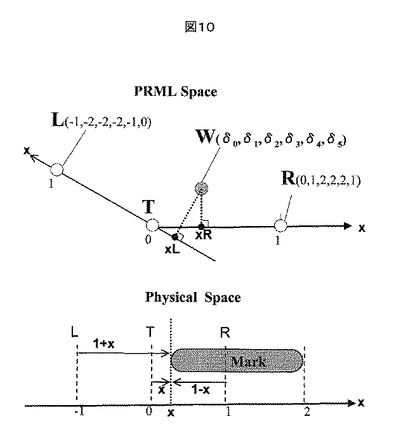
【図11】
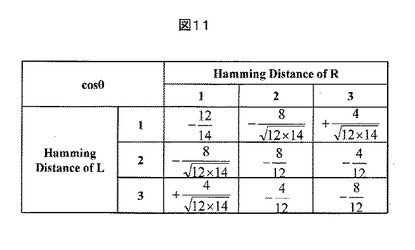
【図12】

【図13】

【図14】
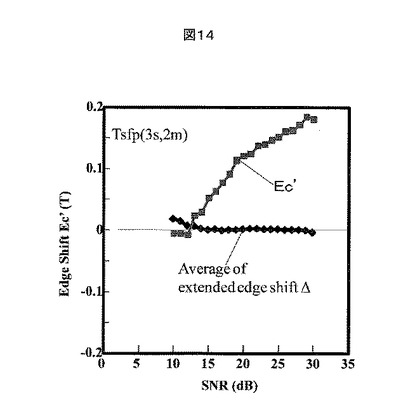
【図15】
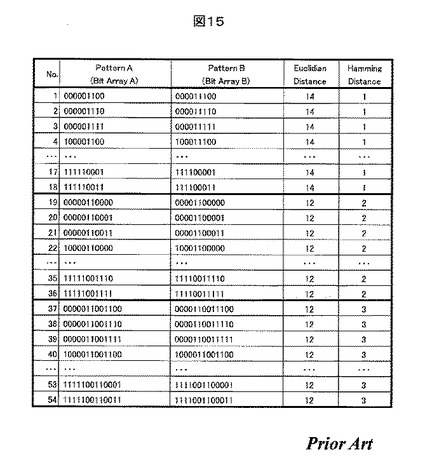
【図16】

【図17】
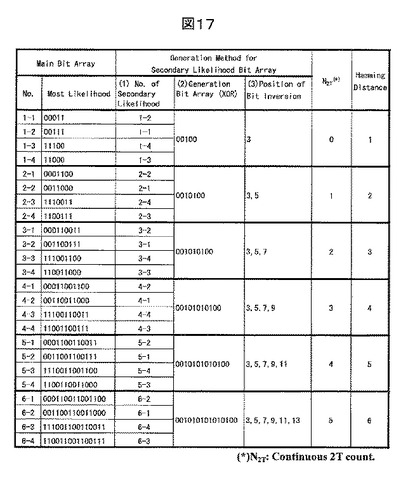
【図18】
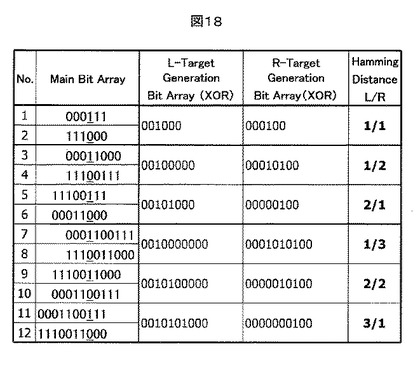
【図19】
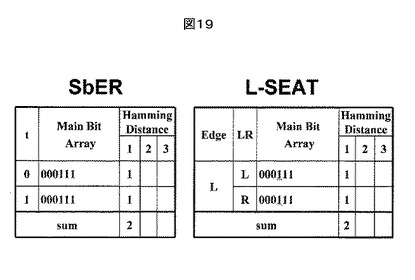
【図20】
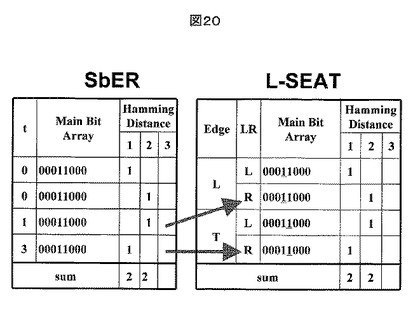
【図21】
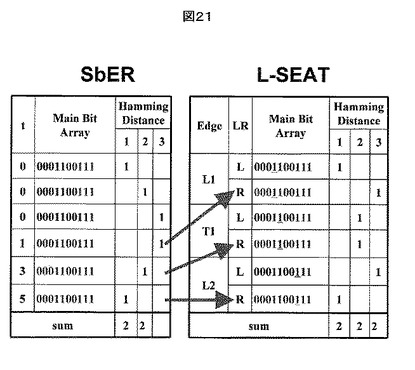
【図22】
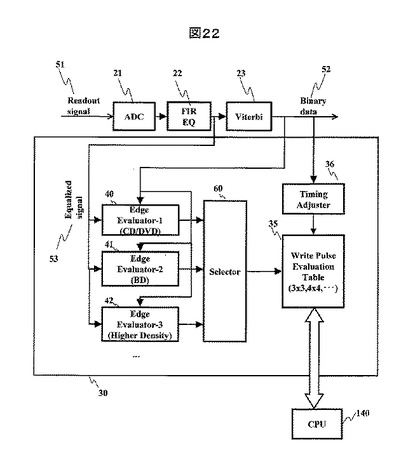
【図23】
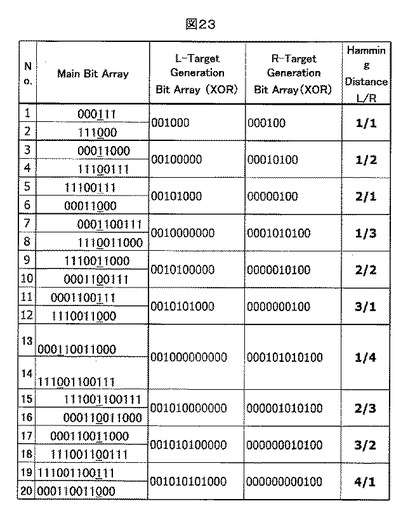
【図24】
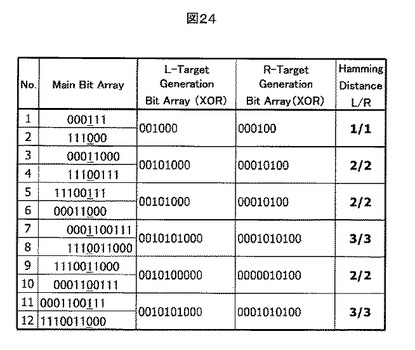
【図25】
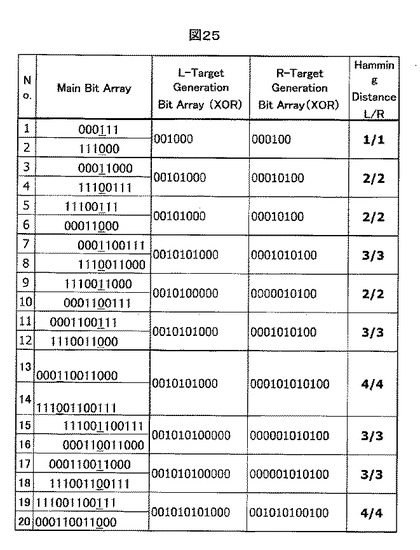
【図26】
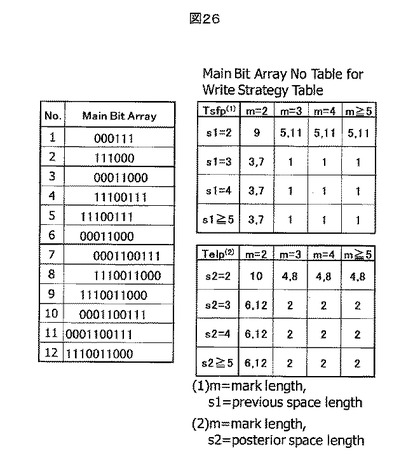
【図27】
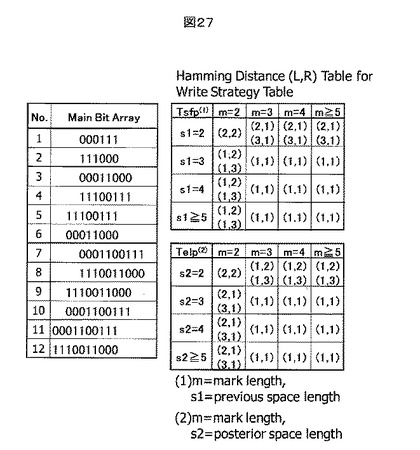
【図31】
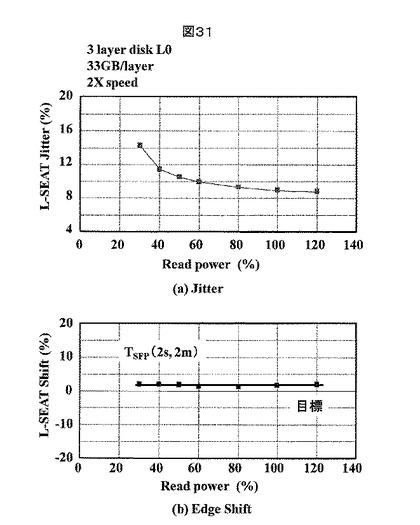
【図32】
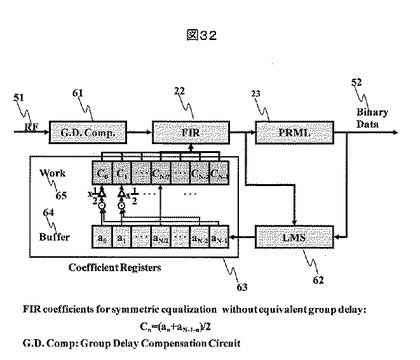
【図33】
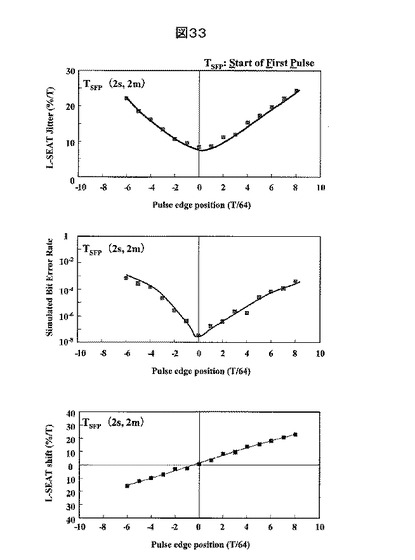
【図34】
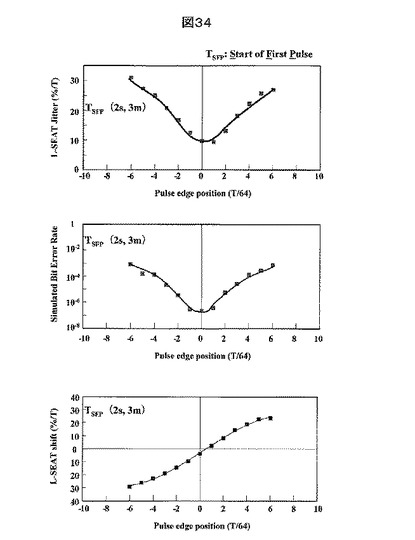
【図35】
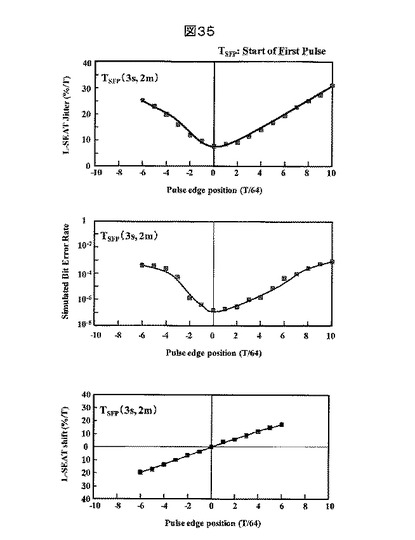
【図36】
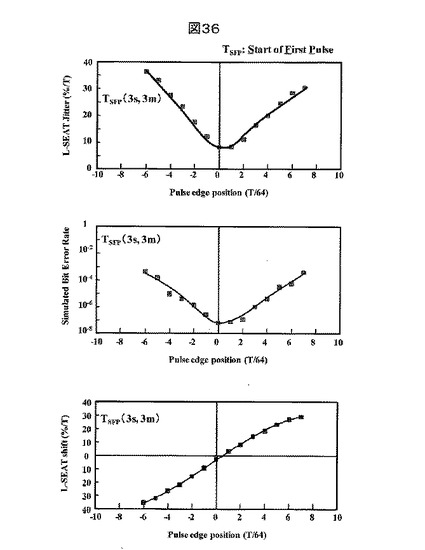
【図37】
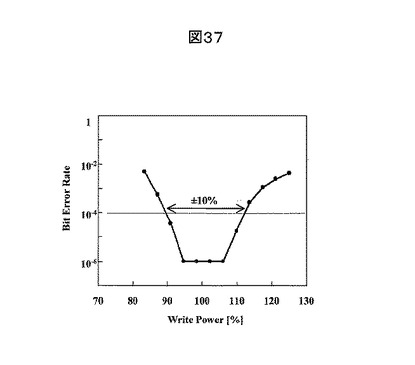
【図38】
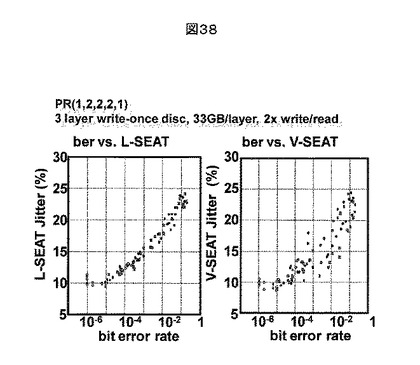
【図39】
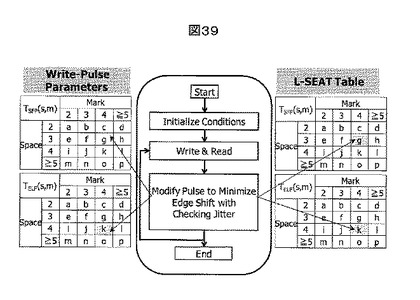
【図40】
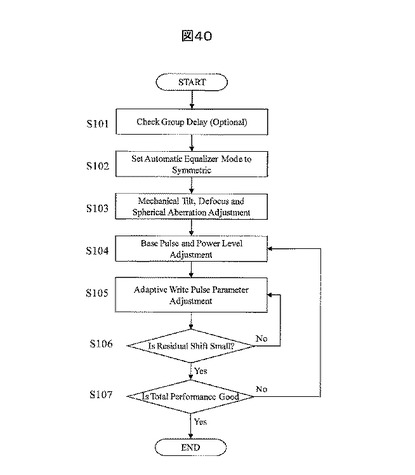
【図41】
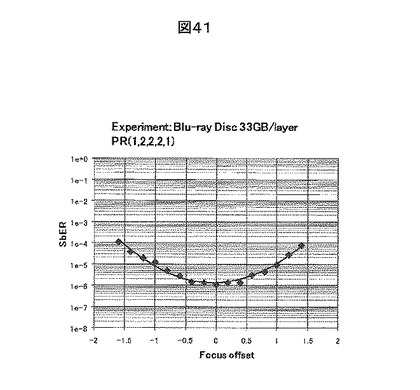
【図42】
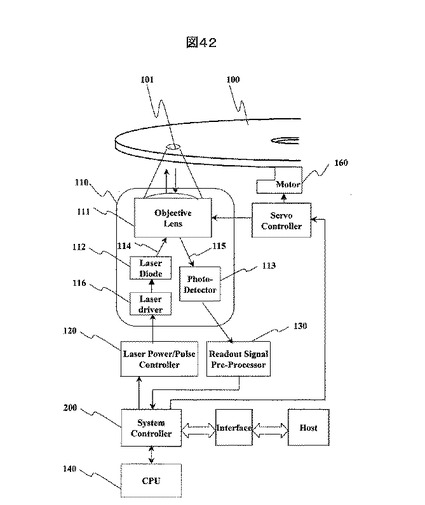
【図43】
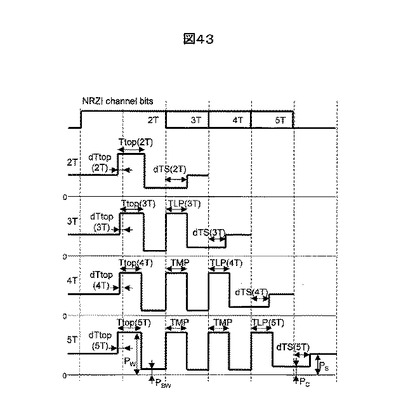
【図44】
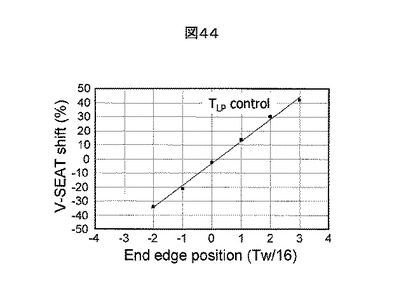
【図45】
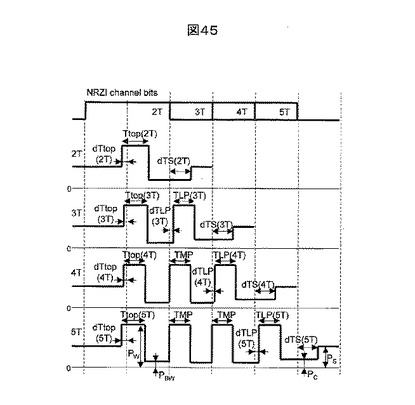
【図46】
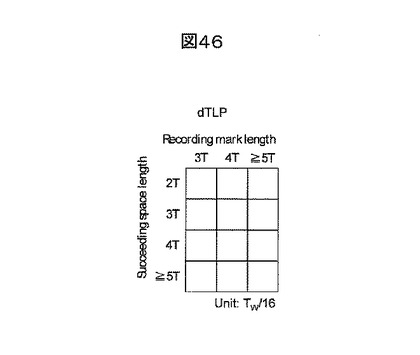
【図47】
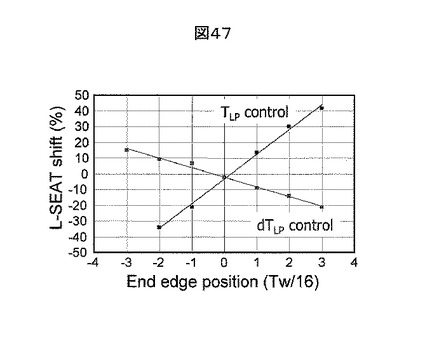
【図48】
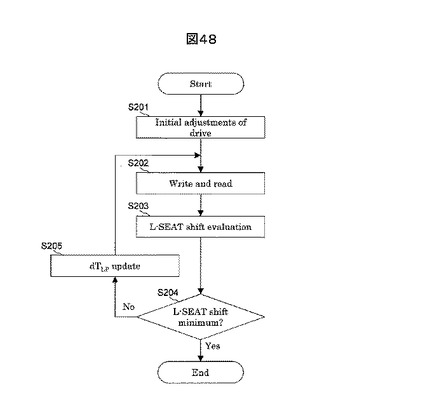
【図5】
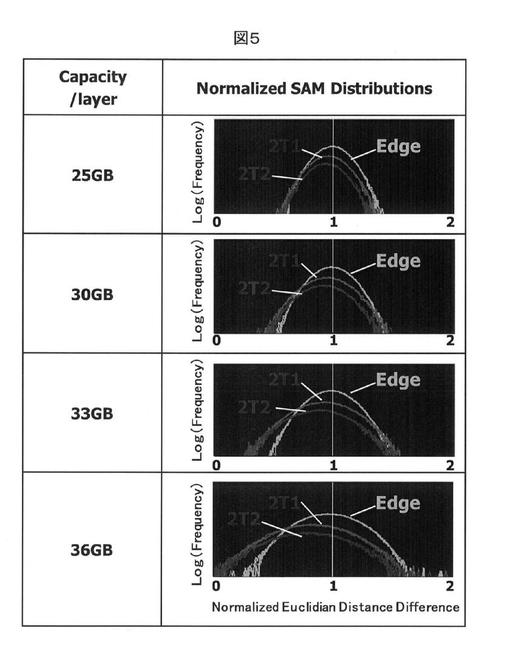
【図28】
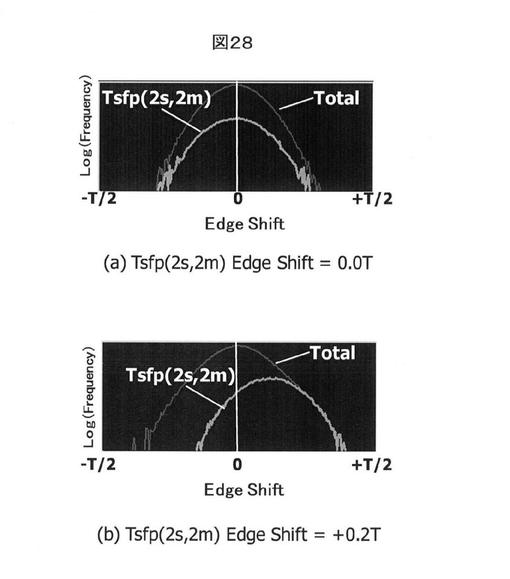
【図29】
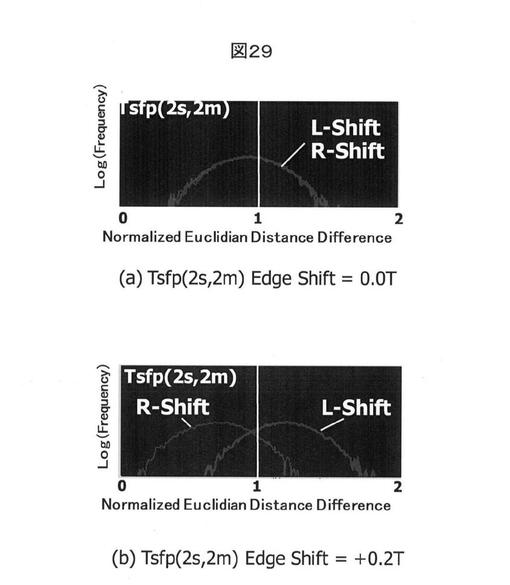
【図30】
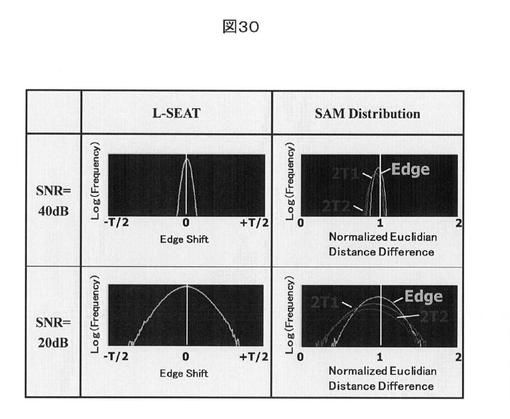
【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図5】
【図28】
【図29】
【図30】
【公開番号】特開2011−150748(P2011−150748A)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願番号】特願2010−9627(P2010−9627)
【出願日】平成22年1月20日(2010.1.20)
【出願人】(509189444)日立コンシューマエレクトロニクス株式会社 (998)
【Fターム(参考)】
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願日】平成22年1月20日(2010.1.20)
【出願人】(509189444)日立コンシューマエレクトロニクス株式会社 (998)
【Fターム(参考)】
[ Back to top ]