
記録装置及び記録装置おけるモータの駆動制御方法
【課題】ユーザの指示に対して、適切な搬送制御及びキャリッジの駆動制御を行う。
【解決手段】外部装置からインターフェースを介して受信したユーザの指示に基づいて記録速度を指定し、搬送モータが駆動を開始してから、記録媒体を所定の搬送量だけ搬送し、搬送ローラが停止するまでの搬送時間を測定し、キャリッジモータの駆動を開始してから記録ヘッドが記録領域に達するまでの空走時間を測定し、測定された搬送時間と指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、測定された空走時間に基づいて次に行われるキャリッジの駆動における空走時間を推定し、推定された搬送時間をRTLF、推定された空走時間をRTCRとして、搬送を開始してから、RTLF−RTCRとなる時間が経過したらキャリッジモータが駆動を開始する。
【解決手段】外部装置からインターフェースを介して受信したユーザの指示に基づいて記録速度を指定し、搬送モータが駆動を開始してから、記録媒体を所定の搬送量だけ搬送し、搬送ローラが停止するまでの搬送時間を測定し、キャリッジモータの駆動を開始してから記録ヘッドが記録領域に達するまでの空走時間を測定し、測定された搬送時間と指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、測定された空走時間に基づいて次に行われるキャリッジの駆動における空走時間を推定し、推定された搬送時間をRTLF、推定された空走時間をRTCRとして、搬送を開始してから、RTLF−RTCRとなる時間が経過したらキャリッジモータが駆動を開始する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、記録装置及び記録装置おけるモータの駆動制御方法に関する。
【背景技術】
【0002】
近年記録装置の高画質化及び高生産性の要求が高まっている。その対策として、記録ヘッドの記録精度(例えばインクジェットプリンタの場合、インクの吐出量や吐出タイミング等)が考えられる。また、記録ヘッドの搭載したキャリッジの動作精度、動作速度及び駆動タイミング、及び記録媒体の搬送精度、搬送速度及び搬送タイミングを向上することが考えられる。
【0003】
これらの対策の中で、キャリッジの駆動、及び記録媒体の搬送のタイミングについて着目する。インクジェットプリンタ等は通常、搬送モータによる記録媒体の搬送と、記録ヘッドによる記録媒体への記録を交互に行うことで記録を行う。
【0004】
現在、搬送モータとキャリッジモータとを制御する方法としてクロス制御と呼ばれる制御方法が多く用いられている。この制御方法においては搬送モータの駆動を開始または終了してから記録媒体が停止するまでの時間(搬送時間)、及びキャリッジの駆動を開始してから記録ヘッドが記録領域に達するまでの時間(空走時間)を見込んで、キャリッジの駆動を開始する。記録媒体の減速中に駆動を開始したキャリッジは、記録媒体が停止した直後に記録領域に達し、記録を開始する。
【0005】
このようなクロス制御について、例えば特許文献1が提案されている。特許文献1では、履歴情報からクロス制御が可能か否かを決定する。クロス制御が可能な場合は、履歴情報から推測される記録媒体の搬送時間と、キャリッジの空走時間との時間差を決定し、この時間差に基づきクロス制御を行う。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−337414号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
記録装置のライフサイクルが長くなり、初期条件と末期状態でのメカ負荷の増加量なども非常に大きなものになってきている。これによる搬送時間の遅延、変動量もより大きなものになっている。また、記録媒体の種類は多数存在する。さらに、記録品質についてのユーザの要望は多様であり、例えば、記録品質を重視する場合や、品質よりも生産性(例えば、単位時間当たりの記録枚数等)を重視する場合もある。
【0008】
しかし、特許文献1のクロス制御方法では、履歴情報から一律の方法により搬送時間及び空走時間を推定する処理を行っている。そのため、ライフサイクル後半には印刷品質を保つために、生産性が大幅に低下する結果にもなりうる。この場合、生産性を重視するようなユーザのニーズに応えることができない。
【0009】
したがって、本発明は、ユーザの指示に対して、適切な搬送制御及びキャリッジの駆動制御を行うことを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明により、搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置であって、外部装置からインターフェースを介してユーザの指示を受信する受信手段と、前記ユーザの指示に基づいて記録速度を指定する指定手段と、前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定する搬送時間測定手段と、前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定する搬送時間推定手段と、前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定する空走時間測定手段と、前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定する空走時間推定手段と、を備え、前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始することを特徴とする記録装置が提供される。
【0011】
また、本発明により、搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置におけるモータの駆動制御方法であって、外部装置からインターフェースを介してユーザの指示を受信し、前記ユーザの指示に基づいて記録速度を指定し、前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定し、前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定し、前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定し、前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始することを特徴とする方法が提供される。
【0012】
さらに、本発明により、搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置におけるモータの駆動制御方法であって、外部装置からインターフェースを介してユーザの指示を受信し、前記ユーザの指示に基づいて記録速度を指定し、前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定し、前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定し、前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定し、前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始することを特徴とする方法が提供される。
【発明の効果】
【0013】
上記構成により、ユーザの指示する記録速度に応じた搬送時間が推定され、推定された搬送時間に基づいて適切な搬送制御及びキャリッジの駆動制御が行われる。そのため、ユーザの指示に従って、適切な搬送制御及びキャリッジの駆動制御がなされるので、たとえ、装置使用が長きにわたった場合でも、例えば、機械的劣化による影響を受けない良好な記録が達成できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係るインクジェット記録装置を示す斜視図
【図2】本発明の実施形態に係るインクジェットプリンタにおけるクロス制御の概念図
【図3】実際の搬送時間のばらつき分布の一例を示した図
【図4】搬送速度の目標値及び実際の速度の波形を示した図
【図5】キャリッジの速度の目標値及び実際の速度(実速度)の波形を示した図
【図6】本発明の実施形態における駆動制御系の構成を示すブロック図
【図7】3つの搬送偏差時間の推定値の算出方法の一例を示した図
【図8】3つの搬送偏差時間の推定値の算出方法の一例を示した図
【図9】記録条件と搬送偏差時間を推定する算出式の関係の一例を示した表を示す図
【図10】本発明の実施形態に係る記録装置の記録動作でのキャリッジ駆動と搬送のシーケンスを示す図
【図11】本発明の実施形態に係る推定搬送偏差時間の算出シーケンスを示す図
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の好適な実施形態の一つとしてインクジェット記録方式を用いた記録装置を例に挙げて説明する。記録装置としては、例えば、記録機能のみを有するシングルファンクションプリンタであってもよいし、また、例えば、記録機能、FAX機能、スキャナ機能等の複数の機能を有するマルチファンクションプリンタであってもよい。また、例えば、カラーフィルタ、電子デバイス、光学デバイス、微小構造物等を所定の記録方式で製造するための製造装置であってもよい。
【0016】
なお、以下の説明において、「記録」とは、文字、図形等有意の情報を形成する場合のみならず、有意無意を問わない。更に人間が視覚で知覚し得るように顕在化したものであるか否かも問わず、広く記録媒体上に画像、模様、パターン、構造物等を形成する、又は媒体の加工を行なう場合も表す。
【0017】
また、「記録媒体」とは、一般的な記録装置で用いられる紙のみならず、布、プラスチック・フィルム、金属板、ガラス、セラミックス、樹脂、木材、皮革等、インクを受容可能なものも表す。
【0018】
更に、「インク」とは、上記「記録」の定義と同様広く解釈されるべきものである。従って、記録媒体上に付与されることによって、画像、模様、パターン等の形成又は記録媒体の加工、或いはインクの処理(例えば、記録媒体に付与されるインク中の色剤の凝固または不溶化)に供され得る液体を表す。
【0019】
以下の説明において、既に説明した部分には同一符号を付し重複説明を省略する。
【0020】
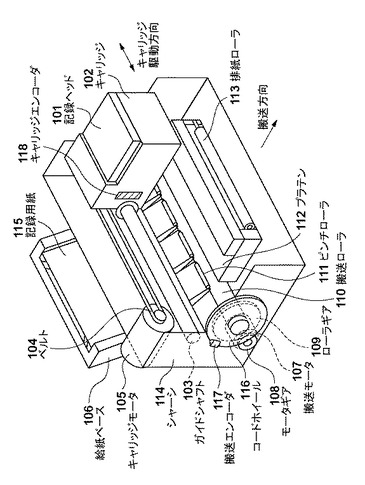
<インクジェット記録装置の全体構成>
図1は、本発明の実施形態に係るインクジェット記録装置(以下、記録装置と呼ぶ)を示す斜視図である。
【0021】
まず、記録媒体を搬送するための構成について説明する。記録待機中において記録媒体である記録用紙115は、給紙ベース106にスタックされており、記録開始時には給紙ローラ(不図示)により記録用紙115が給紙される。給紙された記録用紙115は搬送ローラ110とピンチローラ111との間に挟まれる。ピンチローラ111はピンチローラばね(不図示)により記録用紙に押圧される。この状態でDCモータである搬送モータ107を駆動し、ギア列(モータギア108、搬送ローラギア109)を介して搬送ローラ110を回転(及びピンチローラ111を従動回転)させて記録用紙115を搬送方向(第1の方向)に所定の搬送量だけ搬送する。ここで、搬送量は搬送ローラギア109に圧入されたコードホイール(ロータリーエンコーダフィルム)116に設けられたスリットを搬送エンコーダ117で検知、カウントすることで管理する。記録用紙115上の記録しようとする部分がプラテン112上に達したら、搬送を停止し、記録ヘッド101により、この部分に記録が行われる。記録が行われた後、再び記録用紙115は搬送され、搬送と記録が交互に行われる(すなわち、間欠搬送しながら記録が行われる)。一連の記録がすべて完了すると、排紙ローラ113によって排紙される。なお、本実施形態では記録媒体として記録用紙115を用いているが、構成・目的によっては、ロール紙を用いてもよい。
【0022】
次に、記録媒体に記録を行うための構成について説明する。記録ヘッド101は、記録ヘッド101に供給するインクを貯留するインクタンクを備え、インクジェット方式に従ってインクを吐出して記録を行なうインクジェット記録ヘッドである。インクタンクは、マットブラック(MBk)、マゼンタ(M)、シアン(C)、イエロ(Y)、ブラック(K)が備えられており、これら5つのインクタンクは、それぞれ独立して着脱可能である。記録ヘッド101はキャリッジ102に搭載されている。キャリッジ102は、キャリッジ駆動方向(第2の方向)に沿って往復移動が可能となるように、ガイドシャフト103により支持されている。ガイドシャフト103は、両端がシャーシ114に固定されている。キャリッジモータ105を駆動することにより、キャリッジ102と係合したベルト104を介してキャリッジ102が駆動される。キャリッジ102に備えられたキャリッジエンコーダ118により記録ヘッドの位置情報が検出される。この構成により、キャリッジ102を往復移動させながら記録ヘッド101は記録領域においてインクを吐出して記録を行う。
【0023】
本実施形態に係わる記録ヘッド101は、熱エネルギを利用してインクを吐出するインクジェット方式を採用している。そのため、記録ヘッド101は、発熱抵抗素子を備えている。発熱抵抗素子は、各吐出口のそれぞれに対応して設けられ、対応する発熱抵抗素子に記録信号に応じたパルス電圧を印加する。これにより、対応する吐出口からインクが吐出される。しかし、これに限定されず、例えば、ピエゾ素子を用いた方式、静電素子を用いた方式、MEMS素子を用いた方式など、様々なインクジェット方式を採用してもよい。
【0024】
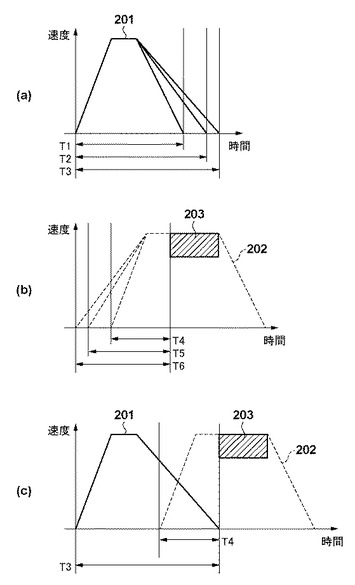
<クロス制御について>
図2(a)〜(c)において、本実施形態に係るインクジェットプリンタにおけるクロス制御の概念図を示す。
【0025】
(a)は、搬送速度のパターンを示す図であり、201は搬送ローラ110の回転速度を示している。搬送モータ107は、搬送ローラ110の回転が所定の速度に達するまで、搬送ローラ110の回転を加速させる。その後、搬送モータ107は搬送ローラ110の回転速度を一定に保つよう駆動する。搬送ローラ110が目標となる量だけ回転した後、搬送モータ107の駆動を終了させる。搬送モータ107の駆動が終了すると、搬送ローラ110は、慣性力により回転しながら、摩擦力等のメカ負荷により減速し、停止する(以下、搬送モータ107の駆動開始から搬送ローラ110が停止するまでの時間を搬送時間とする)。制御系やメカ負荷のばらつきにより、搬送モータ107の搬送時間は、3回の駆動を行った中でT1、T2、T3のようにばらついている。
【0026】
(b)は、キャリッジの速度パターンを示す図であり、202はキャリッジ102の速度を示している。203は記録領域である。キャリッジモータ105は記録ヘッド101が記録領域に達する前にキャリッジ102が所定の速度に達するように、キャリッジ102を加速させる。その後、記録ヘッド101は記録領域203に達し、記録を開始する(以下、キャリッジ102の駆動開始から記録ヘッド101が記録領域203に達するまでの時間を空走時間とする)。制御系やメカ負荷のばらつきにより、キャリッジ102の空走時間は、3回の駆動を行った中でT4、T5、T6のようにばらついている。
【0027】
(c)は、搬送速度が0となるときに記録ヘッド101が記録領域203に達するように、搬送側がT3となる波形と、キャリッジ側がT4となる波形とを重ねた図である。T3は、最も長い搬送時間で、T4は、最も短い空走時間である。(c)において、搬送開始からキャリッジ102の駆動開始までの時間はT3−T4である。このタイミングでキャリッジ102を駆動開始すれば、(a)、(b)におけるいかなるパターンの組み合わせにおいても、搬送速度が0となる前に記録ヘッド101が記録領域203に達することはない(すなわち、斜行記録は起こらない)。
【0028】
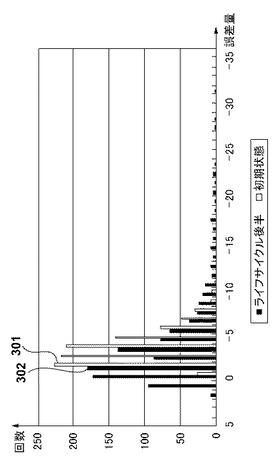
<クロス制御のための搬送時間の推定方法>
図3は実際の搬送時間のばらつき分布の一例を示した図である。以下に、このような搬送時間の分布から、次に行われる記録媒体の搬送における搬送時間を推定する方法を説明する。
【0029】
白色の棒グラフ301が製造直後等の初期状態での搬送時間のばらつき分布である。灰色棒のグラフ302が記録装置のライフサイクル後半のメカ負荷等が増加した状態で搬送時間のばらつき分布である。グラフの横軸は搬送時間の目標値に対する、実際の搬送時間の誤差量を示したもので、マイナスの値が大きいほど、搬送時間も長くなる。グラフの縦軸が計測された搬送時間の回数を示すものである。初期状態301では搬送時間及び誤差量が小さく、分布も狭いことが分かる。ライフサイクル後半302では、大きな誤差量があり、誤差時間の分布は大きな広がりを見せていることが分かる。このようなライフサイクル後半の分布を全て満たすようなタイミングでキャリッジ102の駆動を開始するならば、クロス制御による効果は小さいものとなる。
【0030】
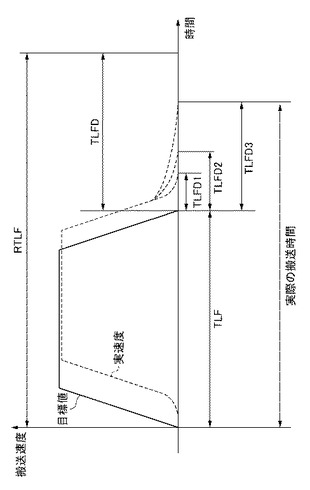
図4は搬送速度の目標値及び実際の速度(実速度)の波形を示した図である。図中実線が目標値で、点線が実速度波形となる。目標値に比べ、実速度波形は一定の遅延時間を持って追従し、かつ負荷変動等によるばらつきを持つ。搬送時間は所定の記録用紙搬送量を満たしうる目標値が必要となる。この搬送時間の目標値をTLFとする。TLFに対する実際の搬送時間は図中点線ように偏差を持ってばらつくものとなる。これらの実際の搬送時間と目標値TLFとの差を搬送偏差時間TLFD1〜3として、これらの値より算出した平均値等の搬送偏差時間の推定値TLFDを求められる。これに次に行われる搬送における目標値TLFを加算してRTLFが求められ、搬送時間が推定される。
【0031】
<クロス制御のためのキャリッジ制御>
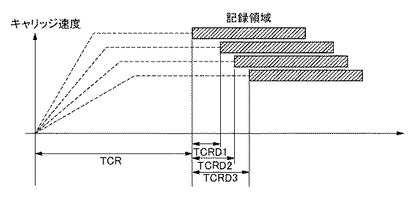
図5はキャリッジ102の速度の目標値及び実際の速度(実速度)の波形を示した図である。図中実線が目標値で、点線が実速度波形となる。目標値に比べ、実速度波形は一定の遅延時間を持って追従し、負荷変動等によるばらつきを持つ。なお、図中では、記録ヘッド101が記録領域に達するまでの時間が遅れていることを明示的に説明するために、各パターンの最高速度を縦軸方向にずらしているが、実際は同じ速度である。キャリッジ102は、記録ヘッド101が記録領域に達するまでの空走時間が必要となる。このキャリッジ102の空走時間の目標値をTCRとし、実際の空走時間と目標値TCRとの差を空走偏差時間TCRD1〜3とする。これらの値TCRD1〜3より空走偏差時間の推定値TCRDを求め、これに次に行われるキャリッジ102の駆動における目標値TCRを加算してRTCRが求められ、空走時間が推定される。
【0032】
ここで得られた値RLFD及びRTCRより、クロス制御のためのキャリッジ102の駆動開始タイミングが決定される。本実施形態においては、搬送開始後RLFD−RTCRの時間が経過したらキャリッジ102の駆動を開始する。
【0033】
<駆動制御系の構成>
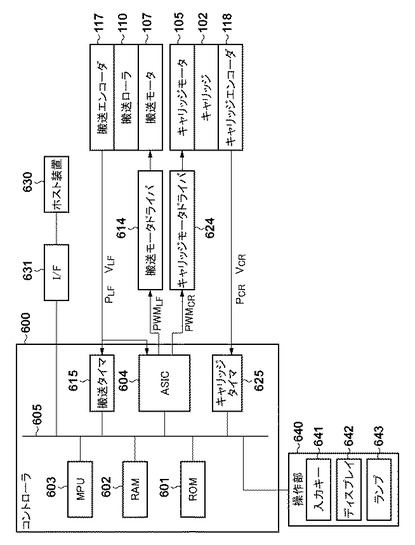
図6は、本実施形態における駆動制御系の構成を示すブロック図である。図中コントローラ600はROM601、RAM602、MPU603、特殊用途集積回路(ASIC)604、搬送タイマ615、キャリッジタイマ625等を具備し、システムバス605を介してそれぞれが通信可能に接続されている。
【0034】
ROM601は、後述する制御シーケンスに対応したプログラム、所要のテーブル、その他の固定データを格納する。RAM602は、画像データの展開領域やプログラム実行のための作業用領域等として用いられ、本実施形態では、記録速度に関するユーザの指示、搬送偏差時間の測定値及び空走偏差時間の測定値等の履歴情報を格納する記憶手段となる。なお、例えば搬送時間について、搬送量毎の履歴保存や、搬送速度毎の履歴保存など、搬送時間のばらつきの特徴に応じたデータ保存のあり方が考えられる。最も簡単なやり方としては、これらの搬送偏差時間を区別せずに記録する方法となる。
【0035】
MPU603は、RAM602等に記憶された情報から、ROM601に記憶されたプログラム等を用いて、本実施形態で必要な演算を行う。例えば、搬送量に基づいて目標搬送時間生成(TLF生成)、及びキャリッジモータ105の駆動を開始する時の記録ヘッド101の位置から記録領域までの距離に基づいて目標空走時間生成(TCR生成)を行う。さらに、RAM602に記憶された動作の履歴情報に基づいて搬送時間推定及び空走時間推定等も行う。なお、搬送速度を変更できる場合は、搬送速度も変数としてTLFが導出され、キャリッジの速度を変更できる場合は、キャリッジの速度も変数としてTCRが導出される。さらに、搬送量はマルチパスまたは通常の記録モードの切り替え等により変更することができる(マルチパスの場合、搬送量は少なくなる)。
【0036】
ASIC604は、搬送制御手段かつキャリッジモータ駆動制御手段である。以下にASICによる搬送側及びキャリッジ駆動側の制御ループを説明する。
【0037】
搬送側について、ASIC604は、MPU603からの動作目標、搬送エンコーダ117からの搬送位置情報PLF、及び速度情報VLFが入力される。動作目標はROM601に記憶されたプログラムをMPU603が実行することにより生成される。搬送モータ107は、フィードバック制御されており、搬送ローラ110の回転速度または位置(回転角)の目標値と、速度情報VLFまたは位置情報PLFとの差分値から操作量となるPWM値PWMLFを計算する。計算されたPWM値PWMLFは搬送モータドライバ614に出力され、搬送モータドライバ614は搬送モータ107に操作量に応じた電流を流して搬送モータ107を駆動させる。
【0038】
キャリッジ駆動側について、ASIC604は、MPU603からの動作目標、キャリッジエンコーダ118からのキャリッジ位置情報PCR、及び速度情報VCRが入力される。動作目標はROM601に記憶されたプログラムをMPU603が実行することにより生成される。キャリッジモータ105は、フィードバック制御されており、キャリッジ102の速度または位置の目標値と、速度情報VCRまたは位置情報PCRとの差分値から操作量となるPWM値PWMCRを計算する。計算されたPWM値PWMCRはキャリッジモータドライバ624に出力され、キャリッジモータドライバ624はキャリッジモータ105に操作量に応じた電流を流してキャリッジモータ105を駆動させる。
【0039】
搬送タイマ615は、搬送モータ107が駆動を開始した時から、記録用紙を所定の搬送量だけ搬送し、搬送ローラ110が停止する時までの搬送時間を測定する搬送時間測定手段である。具体的には、搬送モータ107が駆動を開始する時に、MPU603から信号を受け取ることにより測定を開始し、搬送エンコーダ117から速度情報VLFを受け取り、速度情報VLF=0となった時に測定を終了する。さらに、測定された搬送時間MTLFと目標値TLFとの差から、MPU603によって搬送偏差時間生成が行われる。搬送偏差時間は搬送毎にRAM602に格納され、履歴情報TLFD1、TLFD2・・・TLFDNとしてN回分格納される。なお、搬送時間の履歴情報のうち、最大値または最小値のみを用いてRTLFを取得する場合等、実施条件によっては、すでに記憶されている搬送偏差時間よりも大きいまたは小さいときのみ値を更新してもよい。
【0040】
キャリッジタイマ625は、キャリッジモータ105の駆動を開始した時から記録ヘッド101が記録領域に達する時までの空走時間を測定する空走時間測定手段である。具体的には、キャリッジモータ105の駆動を開始する時に、MPU603から信号を受け取ることにより測定を開始し、キャリッジエンコーダ118から位置情報PCRを受け取り、記録ヘッド101が記録領域に達したことを示す値となった時に測定を終了する。さらに、測定された空走時間MTCRと目標値TCRとの差から、MPU603によって空走偏差時間生成が行われる。空走偏差時間はキャリッジ102の駆動毎にRAM602に格納され、履歴情報TCRD1、TCRD2・・・TCRDMとしてM回分記憶される。なお、TLFの場合と同様、実施条件によっては、すでに記憶されている空走偏差時間よりも大きいまたは小さいときのみ値を更新してもよい。
【0041】
ホスト装置630は、画像データの供給源となる外部装置(コンピュータ、画像読取用のリーダやデジタルカメラなど)であり、例えば、ホスト装置などと総称される。ホスト装置630と記録装置との間では、インターフェース(I/F)631を介して画像データ、コマンド、ステータス信号等の授受が行なわれる。さらに、ユーザはホスト装置630を用いて記録装置に対して、記録用紙及び記録品質等の指定をすることで、記録速度を指定するための指示を行う。
【0042】
操作部640は、記録装置に備えられており、入力キー641、ディスプレイ642、ランプ643等から構成される。例えば、ディスプレイ642には、スタックされている記録情報、メンテナンス情報等が表示され、ユーザは入力キーによりディスプレイ642に表示されているスタックの削除、メンテナンス情報に従ってメンテナンスのための操作等を行う。また、ランプ643には、ユーザに用紙づまり等の警告をするために点灯する。
【0043】
<搬送時間及び空走時間の推定>
クロス制御を行う場合、搬送時間の推定値から空走時間の推定値を差し引いた時間RTLF−RTCRが搬送開始からキャリッジ駆動までの待機時間となる。搬送モータ107が駆動を開始した時から、待機時間が経過した場合にMPU603がキャリッジモータ105の駆動を開始させる。以下、キャリッジの駆動開始のタイミングを決定するために必要なこれらの値RTLFおよびRTCRの算出方法について説明する。
【0044】
搬送時間推定は、MPU603がROM601に記憶されたプログラムを実行し、搬送時間の目標値に搬送偏差時間の推定値を加算することによって行われる(RTLF=TLF+TLFD)。搬送時間の推定値は、ホスト装置630からのユーザの指示、及びRAM602に格納された搬送偏差時間の履歴情報に基づいて異なる値が算出され、この値が大きいほど、キャリッジの駆動タイミングが遅くなり、結果的に記録時間も長くなる。すなわち、本実施形態では、ホスト装置630からのユーザの指示、及びRAM602に格納された搬送偏差時間の履歴情報から記録速度が指定され、指定された記録速度に応じてた搬送時間が推定されことになる。
【0045】
搬送時間の目標値TLFは、搬送量によって決まる所定の値であるため、搬送偏差時間の推定値TLFDを調節することで、搬送時間の推定値を調節する。本実施形態では、搬送偏差時間推定は3通りの算出式により行うことが可能で、MPU603は、指定された記録速度に応じたいずれか1つの算出式に基づきTLFDを算出する。具体的なシーケンスについては後述する。
【0046】
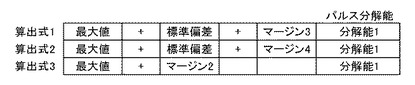
TLFDはRAM602に記憶された複数の搬送偏差時間(TLFD1、TLFD2・・・TLFDN)に基づいて求められる。図7、図8は搬送偏差時間の推定値の算出方法の一例を示したものとなる。本実施形態では、算出式1を用いる場合は斜行記録の可能性が最も高く、算出式3を用いる場合は斜行記録の可能性が最も低いものとしている。斜行記録の可能性が高いものほど、搬送動作と、キャリッジの動作が深く重なる(キャリッジの駆動タイミングが早くなる)ものになるが、記録速度の面では有利になる。
【0047】
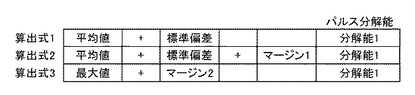
図7の例では、算出式1が用いられた場合、TLFD1〜Nの平均値に標準偏差を加えた値がTLFDとされる。算出式2が用いられた場合、TLFD1〜Nの平均値に、標準偏差、及び所定のマージン1を加えた値がTLFDとされる。算出式3が用いられた場合、TLFD1〜Nの最大値に所定のマージン2を加えた値がTLFDとされる。なお、この例では、どのモードでも同一のエンコーダパルス分解能を用いて、搬送偏差時間が推定される。このエンコーダパルス分解能は、記録用紙毎に異なる、搬送誤差に対する画像劣化の視認限界から決定される。
【0048】
図8の例では、算出式1が用いられた場合、TLFD1〜Nの最大値に、標準偏差、及びマージン3を加えた値がTLFDとされる。算出式2が用いられた場合、TLFD1〜Nの最大値に、標準偏差、及びマージン4(>マージン3)を加えた値がTLFDとされる。算出式3が用いられた場合、TLFD1〜Nの最大値に所定のマージン2(マージン2は、標準偏差とマージン4との和より大きい)を加えた値がTLFDとされる。この例では、算出式1、2と算出式3とで異なるエンコーダパルス分解能を用いて、搬送偏差時間が推定される。
【0049】
なお、これらの算出式は本実施形態における例に過ぎず、算出式の数は2または4つ以上でもよい。さらには1つの算出式で、マージンの量をユーザが指定した速度に応じて調整するようにしてもよい。この場合、マージンの算出方法として、例えば、ユーザが単位時間当たりの記録枚数を指定して、その逆数を記録速度としてこれに基づきマージン量を算出する等の方法がある。
【0050】
算出式1〜3のいずれを用いるか選択する構成について説明する。ホスト装置630からのユーザ入力により、記録用紙、記録品質等の記録速度に関わる記録条件が指定される。記録条件はインターフェース631を介して、RAM602に入力、記憶される。MPU603はRAM602に記憶された搬送偏差時間から搬送偏差時間の正規分布や異常値の有無等の履歴情報を取得する。MPU603は記録条件及び履歴情報に基づいて、何れの算出式を用いるかを決定する。本実施形態では、条件によっては、何れの算出式も選択せず、MPU603はクロス制御を行わない構成としている。なお、空走偏差時間の履歴情報も記録条件としてよい。
【0051】
図9は記録条件と用いる算出式の関係の一例を示したものである。クロス制御モードは、搬送偏差時間の履歴情報に基づいて決定される条件で、例えば搬送偏差時間の正規分布や異常値の有無等応じて、標準または安全モードに決定される。生産性最重視の普通紙−速い、標準などでは、標準モードでは時間短縮効果の高い算出式1が設定され、安全モードでは算出式2が割り振られている。普通紙でも記録品質を重視する普通紙−きれいでは、標準モードでは算出式3、安全モードではクロス制御OFFを割り振るものとしている。実際には、記録品質が高い記録モードでは、記録画像の形成がマルチパスで行われることが多い。これは、そもそもとして搬送時間が短くなることを示しており、クロス制御をOFFにしたところで、記録速度に与える影響が少ないことを示している。記録品質が最優先される光沢紙においては、光沢紙−標準では、標準モードでは算出式2、安全モードでは算出式3が設定される。光沢紙−最高では、最初からクロス制御はOFFとして、確実に斜行記録が発生しないようにしている。コート紙については、普通紙と光沢紙の間となる設定となっている。
【0052】
なお、記録条件と算出式及びクロス制御のON/OFFとの関係はこれに限られず、例えば搬送偏差時間の分布が小さい場合は、常にクロス制御を有効にするような構成も考えられる。また、記録媒体がロール紙となる場合は、ロール紙直径の変動に合わせ、記録条件を設定する構成も考えられる。
【0053】
再び図6を参照し、空走時間の推定について説明する。空走時間推定は、MPU603がROM601に記憶されたプログラムを実行し、空走時間の目標値に空走偏差時間の推定値を加算することによって行われる(RTCR=TCR+TCRD)。具体的なシーケンスについては後述する。
【0054】
TCRDは、RAM602に記憶された複数の空走偏差時間(TCRD1、TCRD2・・・TCRDM)から、MPU603により算出される。なお、本実施形態では、空走偏差時間の履歴情報TCRD1、TCRD2・・・TCRDMのうち、最小のものをTCRDとして選択する。
【0055】
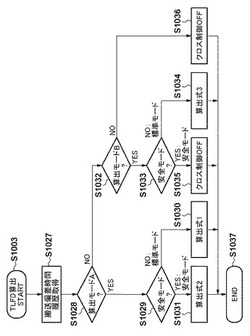
<駆動制御のシーケンス>
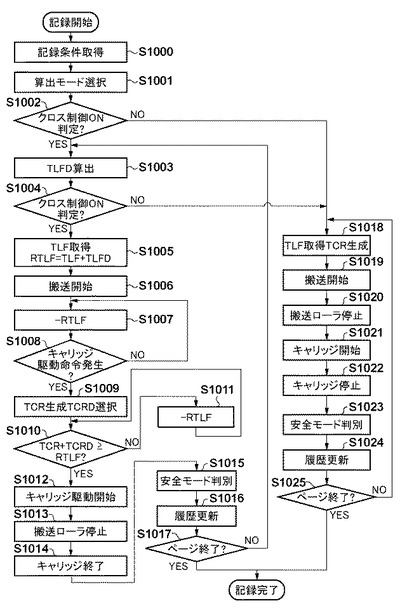
図10は、本実施形態に係る記録装置の記録動作でのキャリッジ駆動と搬送のシーケンスを示す図である。
【0056】
プリンタに電源が入った後、プリンタドライバなどから記録命令が発せられ、記録動作が開始となる。S1000では、MPU603が、ユーザが選択した記録用紙の種別及び記録品質等のRAM602に記憶されている記録条件取得を行う。S1001では、MPU603が、記録条件に基づき、算出モードを選択する。この際併せて、搬送偏差時間及び空走偏差時間の履歴情報も参照し、過去の搬送において、極端な遅延が発生する傾向があった場合等、分布が異常である場合、安全モードで搬送偏差時間を推定するための識別フラグも求められることになる。安全モードとするための判定基準について、最も厳密な場合は、搬送偏差時間が所定の許容量を一回でも超えた場合に、安全モードの移行することが考えられる。また、搬送誤差がある程度許容できるものについては、搬送偏差時間の標準偏差が閾値を超えた場合等とする考え方もある。提供すべき記録品質と生産性に応じて、最適判断方法が決まるものとなる。
【0057】
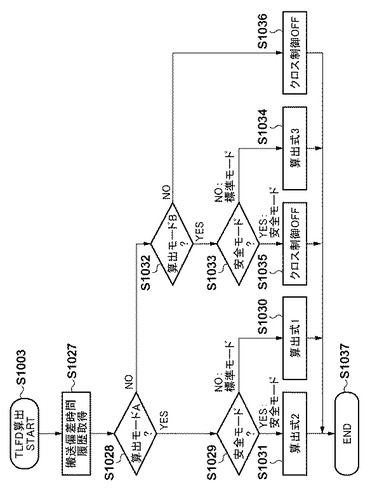
S1002では、例えば、記録用紙の種別が図9のテーブルにない場合等において、最初からクロス制御自体を行わないようにするため、クロス制御を行わないシーケンス(No)が選択される。一方、クロス制御を行うシーケンスが選択された場合には、S1003においてMPU603によりTLFDの算出が実行される。TLFDの算出は図11のシーケンスのとおりで、以下に説明する。
【0058】
TLFD算出(S1003)が開始されると、まずS1027において、過去の搬送偏差時間の分布等の搬送偏差時間の履歴が取得される。また、ここから、前回の搬送で選択されたTLFD等の履歴データも確認される。
【0059】
S1001で求められた算出モードが、算出モードAであった場合(Yes)には、S1028において算出モードAが選択され、S1029において安全モードの発生確認を行う。S1029で標準モードと判別された場合(No)には、S1030において、算出式1によりTLFDが算出される。安全モードと判別された場合(Yes)には、S1031において、算出式2によりTLFDが算出される。
【0060】
S1028において、算出モードAが選択されなかった場合(No)には、S1032において、算出モードBに該当するか否かの判定が行われる。算出モードBが選択された場合(Yes)には、S1033において、安全モードの発生確認が行われる。S1033で標準モードと判別された場合(No)には、S1034において、算出式3によりTLFDが算出される。安全モードと判別された場合(Yes)には、S1035において、クロス制御はOFFとなり実行されない。
【0061】
S1032において、算出モードBが選択されなかった場合(No)には、S1036において、状態不定と判断し、クロス制御はOFFとなり実行されない。このようなシーケンスにより、搬送偏差時間の推定値TLFDあるいはクロス制御のOFFが決定されて、S1037において、図11のシーケンスが終了する。
【0062】
図10に戻る。S1004において図11に示すシーケンス(S1003)の結果を受け、再度クロス制御のON/OFF判定を実行する。クロス制御が有効な場合には、S1005において、指定された搬送量に基づいて得られた搬送時間の目標値TLFが取得され、その値にS1003で算出されたTLFDが加算され、搬送時間推定が行われる(RTLF=TLF+TLFD)。その後、S1006において搬送が開始され、S1007において時間が経過するごとに(制御ループが実行されるごとに)RTLFが減算されていく。
【0063】
搬送開始後に、S1008において、キャリッジ駆動命令が発生すると、S1009において、MPU603により記録ヘッド101の現在位置から記録領域までの距離に基づいて空走時間の目標値TCRが生成される。さらに、過去M回分のキャリッジ駆動における空走偏差時間TCRD1〜Mの履歴情報の中から最小値となる値がTCRDとして選択される。
【0064】
S1010において、MPU603がTCRとTCRDとを加算し、空走時間推定が行われ、推定されたRTCRと現在のRTLFとが比較される。RTCRがRTLF以上である場合(Yes)には、キャリッジ102の駆動を開始する条件が整ったと判断し、S1012においてMPU603がキャリッジ102の駆動を開始させる。RTCRよりもRTLFの方が大きい場合(No)には、所定時間分RTLFが減算され、再度S1010にてRTCRとRTLFを比較する流れとなる。
【0065】
S1013において、MPU603が搬送モータ107の駆動を終了させ、搬送ローラ110が停止する。キャリッジ102は、記録ヘッド101が記録領域外に達して記録が停止すると、S1014において、MPU603がキャリッジモータ105の駆動を終了させ、キャリッジ102は停止する。その後、S1015において、測定された搬送時間MTLFと目標値TLFとの差である搬送偏差時間生成、及び測定された空走時間MTCRと目標値TCRとの差である空走偏差時間生成が行われる。ここで生成された搬送偏差時間または空走偏差時間から判断して、クロス制御を行うにあたり斜行記録を行う可能性が高い場合には、次回以降のクロス制御を安全モードとして実行される(安全モードの判別)。S1016において、ここで得られた搬送偏差時間及び空走偏差時間はRAM602に保存され、履歴情報が更新される。S1017において、今回の動作でページ内の全ての記録が完了している場合には、S1026で記録が完了する。記録が完了していない場合には、再度S1003に戻り、記録が行われる。
【0066】
S1002及びS1004において、クロス制御を実行しない場合(No)が選択された場合を説明する。この場合には、搬送ローラ110が停止したことを確認した後に、キャリッジ102を駆動するが、搬送偏差時間及び空走偏差時間を取得し、履歴情報を更新する必要はある。そのため、S1018において、動作開始前に、それぞれの動作時間の目標値TLF及びTCRを生成する。そして、S1019において、搬送が開始され、S1020において、MPU603が搬送モータ107の駆動を終了させ、搬送ローラ110が停止する。搬送ローラ110の停止後、S1021において、搬送エンコーダ117からASIC604を介して信号を受信したMPU603がキャリッジ102の駆動を開始させる。キャリッジ102は、記録ヘッド101が記録領域外に達して記録が停止すると、S1022において、キャリッジモータ105の駆動が終了し、キャリッジ102は停止する。その後、S1023において、S1015と同様に搬送偏差時間及び空走偏差時間の生成、及び安全モードの判別が行われ、S1024において、ここで得られた搬送偏差時間及び空走偏差時間はRAM602に保存され、履歴情報が更新される。S1025において、今回の動作でページ内の全ての記録が完了している場合には、S1026で記録が完了する。記録が完了していない場合には、再度S1018に戻り、記録が行われる。
【0067】
<本実施形態の効果及び他の実施形態>
本実施形態では、ユーザは記録媒体の種類(ロール紙の場合はその残量)、及び記録品質を指定することで、記録速度が指定されることになる。さらに、搬送の履歴情報に応じて搬送時間を推定するための算出式が選択され、場合によってはクロス制御をOFFにすることもできる。したがって、本実施形態により、ユーザの要求、さらには記録装置の状態等に対して、適切なクロス制御を行う記録装置が提供される。
【0068】
また、本実施形態においては、搬送及びキャリッジ駆動の履歴情報として、測定値と目標値との差である偏差時間が用いられ、これをもとに搬送及び空走時間が推定される。そのため、1回の搬送量、及び用紙のサイズ(記録領域の大きさ)を変更した場合であっても、すなわちTLF、TCRを変更しても、変更前の履歴情報を用いた推定は有効である。しかし、これに限らず、例えば搬送量を調節する機能を有さず、記録領域を変更することができない記録装置等においては、偏差時間を求めずに、搬送時間及び空走時間の測定値を履歴情報として、搬送時間推定及び空走時間推定を行うことも可能である。
【0069】
さらに、搬送側での制御についても、記録終了と同時に搬送を開始する構成としてもよい。具体的には、MPU603が、キャリッジエンコーダ118からの位置情報PCRをASIC604を介して受け取り、記録終了と判断すると同時に、ASIC604に搬送を開始するための信号を送信する。この構成により、例えば、記録ヘッド101が記録領域を出て、記録を停止した時にMPU603が搬送を開始させることもできる。このような制御により、記録中に搬送が開始されることを防止することができるだけでなく、記録を停止した時からキャリッジ102が停止する時までの時間の無駄が削減される。
【技術分野】
【0001】
本発明は、記録装置及び記録装置おけるモータの駆動制御方法に関する。
【背景技術】
【0002】
近年記録装置の高画質化及び高生産性の要求が高まっている。その対策として、記録ヘッドの記録精度(例えばインクジェットプリンタの場合、インクの吐出量や吐出タイミング等)が考えられる。また、記録ヘッドの搭載したキャリッジの動作精度、動作速度及び駆動タイミング、及び記録媒体の搬送精度、搬送速度及び搬送タイミングを向上することが考えられる。
【0003】
これらの対策の中で、キャリッジの駆動、及び記録媒体の搬送のタイミングについて着目する。インクジェットプリンタ等は通常、搬送モータによる記録媒体の搬送と、記録ヘッドによる記録媒体への記録を交互に行うことで記録を行う。
【0004】
現在、搬送モータとキャリッジモータとを制御する方法としてクロス制御と呼ばれる制御方法が多く用いられている。この制御方法においては搬送モータの駆動を開始または終了してから記録媒体が停止するまでの時間(搬送時間)、及びキャリッジの駆動を開始してから記録ヘッドが記録領域に達するまでの時間(空走時間)を見込んで、キャリッジの駆動を開始する。記録媒体の減速中に駆動を開始したキャリッジは、記録媒体が停止した直後に記録領域に達し、記録を開始する。
【0005】
このようなクロス制御について、例えば特許文献1が提案されている。特許文献1では、履歴情報からクロス制御が可能か否かを決定する。クロス制御が可能な場合は、履歴情報から推測される記録媒体の搬送時間と、キャリッジの空走時間との時間差を決定し、この時間差に基づきクロス制御を行う。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−337414号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
記録装置のライフサイクルが長くなり、初期条件と末期状態でのメカ負荷の増加量なども非常に大きなものになってきている。これによる搬送時間の遅延、変動量もより大きなものになっている。また、記録媒体の種類は多数存在する。さらに、記録品質についてのユーザの要望は多様であり、例えば、記録品質を重視する場合や、品質よりも生産性(例えば、単位時間当たりの記録枚数等)を重視する場合もある。
【0008】
しかし、特許文献1のクロス制御方法では、履歴情報から一律の方法により搬送時間及び空走時間を推定する処理を行っている。そのため、ライフサイクル後半には印刷品質を保つために、生産性が大幅に低下する結果にもなりうる。この場合、生産性を重視するようなユーザのニーズに応えることができない。
【0009】
したがって、本発明は、ユーザの指示に対して、適切な搬送制御及びキャリッジの駆動制御を行うことを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明により、搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置であって、外部装置からインターフェースを介してユーザの指示を受信する受信手段と、前記ユーザの指示に基づいて記録速度を指定する指定手段と、前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定する搬送時間測定手段と、前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定する搬送時間推定手段と、前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定する空走時間測定手段と、前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定する空走時間推定手段と、を備え、前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始することを特徴とする記録装置が提供される。
【0011】
また、本発明により、搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置におけるモータの駆動制御方法であって、外部装置からインターフェースを介してユーザの指示を受信し、前記ユーザの指示に基づいて記録速度を指定し、前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定し、前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定し、前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定し、前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始することを特徴とする方法が提供される。
【0012】
さらに、本発明により、搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置におけるモータの駆動制御方法であって、外部装置からインターフェースを介してユーザの指示を受信し、前記ユーザの指示に基づいて記録速度を指定し、前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定し、前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定し、前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定し、前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始することを特徴とする方法が提供される。
【発明の効果】
【0013】
上記構成により、ユーザの指示する記録速度に応じた搬送時間が推定され、推定された搬送時間に基づいて適切な搬送制御及びキャリッジの駆動制御が行われる。そのため、ユーザの指示に従って、適切な搬送制御及びキャリッジの駆動制御がなされるので、たとえ、装置使用が長きにわたった場合でも、例えば、機械的劣化による影響を受けない良好な記録が達成できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係るインクジェット記録装置を示す斜視図
【図2】本発明の実施形態に係るインクジェットプリンタにおけるクロス制御の概念図
【図3】実際の搬送時間のばらつき分布の一例を示した図
【図4】搬送速度の目標値及び実際の速度の波形を示した図
【図5】キャリッジの速度の目標値及び実際の速度(実速度)の波形を示した図
【図6】本発明の実施形態における駆動制御系の構成を示すブロック図
【図7】3つの搬送偏差時間の推定値の算出方法の一例を示した図
【図8】3つの搬送偏差時間の推定値の算出方法の一例を示した図
【図9】記録条件と搬送偏差時間を推定する算出式の関係の一例を示した表を示す図
【図10】本発明の実施形態に係る記録装置の記録動作でのキャリッジ駆動と搬送のシーケンスを示す図
【図11】本発明の実施形態に係る推定搬送偏差時間の算出シーケンスを示す図
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の好適な実施形態の一つとしてインクジェット記録方式を用いた記録装置を例に挙げて説明する。記録装置としては、例えば、記録機能のみを有するシングルファンクションプリンタであってもよいし、また、例えば、記録機能、FAX機能、スキャナ機能等の複数の機能を有するマルチファンクションプリンタであってもよい。また、例えば、カラーフィルタ、電子デバイス、光学デバイス、微小構造物等を所定の記録方式で製造するための製造装置であってもよい。
【0016】
なお、以下の説明において、「記録」とは、文字、図形等有意の情報を形成する場合のみならず、有意無意を問わない。更に人間が視覚で知覚し得るように顕在化したものであるか否かも問わず、広く記録媒体上に画像、模様、パターン、構造物等を形成する、又は媒体の加工を行なう場合も表す。
【0017】
また、「記録媒体」とは、一般的な記録装置で用いられる紙のみならず、布、プラスチック・フィルム、金属板、ガラス、セラミックス、樹脂、木材、皮革等、インクを受容可能なものも表す。
【0018】
更に、「インク」とは、上記「記録」の定義と同様広く解釈されるべきものである。従って、記録媒体上に付与されることによって、画像、模様、パターン等の形成又は記録媒体の加工、或いはインクの処理(例えば、記録媒体に付与されるインク中の色剤の凝固または不溶化)に供され得る液体を表す。
【0019】
以下の説明において、既に説明した部分には同一符号を付し重複説明を省略する。
【0020】
<インクジェット記録装置の全体構成>
図1は、本発明の実施形態に係るインクジェット記録装置(以下、記録装置と呼ぶ)を示す斜視図である。
【0021】
まず、記録媒体を搬送するための構成について説明する。記録待機中において記録媒体である記録用紙115は、給紙ベース106にスタックされており、記録開始時には給紙ローラ(不図示)により記録用紙115が給紙される。給紙された記録用紙115は搬送ローラ110とピンチローラ111との間に挟まれる。ピンチローラ111はピンチローラばね(不図示)により記録用紙に押圧される。この状態でDCモータである搬送モータ107を駆動し、ギア列(モータギア108、搬送ローラギア109)を介して搬送ローラ110を回転(及びピンチローラ111を従動回転)させて記録用紙115を搬送方向(第1の方向)に所定の搬送量だけ搬送する。ここで、搬送量は搬送ローラギア109に圧入されたコードホイール(ロータリーエンコーダフィルム)116に設けられたスリットを搬送エンコーダ117で検知、カウントすることで管理する。記録用紙115上の記録しようとする部分がプラテン112上に達したら、搬送を停止し、記録ヘッド101により、この部分に記録が行われる。記録が行われた後、再び記録用紙115は搬送され、搬送と記録が交互に行われる(すなわち、間欠搬送しながら記録が行われる)。一連の記録がすべて完了すると、排紙ローラ113によって排紙される。なお、本実施形態では記録媒体として記録用紙115を用いているが、構成・目的によっては、ロール紙を用いてもよい。
【0022】
次に、記録媒体に記録を行うための構成について説明する。記録ヘッド101は、記録ヘッド101に供給するインクを貯留するインクタンクを備え、インクジェット方式に従ってインクを吐出して記録を行なうインクジェット記録ヘッドである。インクタンクは、マットブラック(MBk)、マゼンタ(M)、シアン(C)、イエロ(Y)、ブラック(K)が備えられており、これら5つのインクタンクは、それぞれ独立して着脱可能である。記録ヘッド101はキャリッジ102に搭載されている。キャリッジ102は、キャリッジ駆動方向(第2の方向)に沿って往復移動が可能となるように、ガイドシャフト103により支持されている。ガイドシャフト103は、両端がシャーシ114に固定されている。キャリッジモータ105を駆動することにより、キャリッジ102と係合したベルト104を介してキャリッジ102が駆動される。キャリッジ102に備えられたキャリッジエンコーダ118により記録ヘッドの位置情報が検出される。この構成により、キャリッジ102を往復移動させながら記録ヘッド101は記録領域においてインクを吐出して記録を行う。
【0023】
本実施形態に係わる記録ヘッド101は、熱エネルギを利用してインクを吐出するインクジェット方式を採用している。そのため、記録ヘッド101は、発熱抵抗素子を備えている。発熱抵抗素子は、各吐出口のそれぞれに対応して設けられ、対応する発熱抵抗素子に記録信号に応じたパルス電圧を印加する。これにより、対応する吐出口からインクが吐出される。しかし、これに限定されず、例えば、ピエゾ素子を用いた方式、静電素子を用いた方式、MEMS素子を用いた方式など、様々なインクジェット方式を採用してもよい。
【0024】
<クロス制御について>
図2(a)〜(c)において、本実施形態に係るインクジェットプリンタにおけるクロス制御の概念図を示す。
【0025】
(a)は、搬送速度のパターンを示す図であり、201は搬送ローラ110の回転速度を示している。搬送モータ107は、搬送ローラ110の回転が所定の速度に達するまで、搬送ローラ110の回転を加速させる。その後、搬送モータ107は搬送ローラ110の回転速度を一定に保つよう駆動する。搬送ローラ110が目標となる量だけ回転した後、搬送モータ107の駆動を終了させる。搬送モータ107の駆動が終了すると、搬送ローラ110は、慣性力により回転しながら、摩擦力等のメカ負荷により減速し、停止する(以下、搬送モータ107の駆動開始から搬送ローラ110が停止するまでの時間を搬送時間とする)。制御系やメカ負荷のばらつきにより、搬送モータ107の搬送時間は、3回の駆動を行った中でT1、T2、T3のようにばらついている。
【0026】
(b)は、キャリッジの速度パターンを示す図であり、202はキャリッジ102の速度を示している。203は記録領域である。キャリッジモータ105は記録ヘッド101が記録領域に達する前にキャリッジ102が所定の速度に達するように、キャリッジ102を加速させる。その後、記録ヘッド101は記録領域203に達し、記録を開始する(以下、キャリッジ102の駆動開始から記録ヘッド101が記録領域203に達するまでの時間を空走時間とする)。制御系やメカ負荷のばらつきにより、キャリッジ102の空走時間は、3回の駆動を行った中でT4、T5、T6のようにばらついている。
【0027】
(c)は、搬送速度が0となるときに記録ヘッド101が記録領域203に達するように、搬送側がT3となる波形と、キャリッジ側がT4となる波形とを重ねた図である。T3は、最も長い搬送時間で、T4は、最も短い空走時間である。(c)において、搬送開始からキャリッジ102の駆動開始までの時間はT3−T4である。このタイミングでキャリッジ102を駆動開始すれば、(a)、(b)におけるいかなるパターンの組み合わせにおいても、搬送速度が0となる前に記録ヘッド101が記録領域203に達することはない(すなわち、斜行記録は起こらない)。
【0028】
<クロス制御のための搬送時間の推定方法>
図3は実際の搬送時間のばらつき分布の一例を示した図である。以下に、このような搬送時間の分布から、次に行われる記録媒体の搬送における搬送時間を推定する方法を説明する。
【0029】
白色の棒グラフ301が製造直後等の初期状態での搬送時間のばらつき分布である。灰色棒のグラフ302が記録装置のライフサイクル後半のメカ負荷等が増加した状態で搬送時間のばらつき分布である。グラフの横軸は搬送時間の目標値に対する、実際の搬送時間の誤差量を示したもので、マイナスの値が大きいほど、搬送時間も長くなる。グラフの縦軸が計測された搬送時間の回数を示すものである。初期状態301では搬送時間及び誤差量が小さく、分布も狭いことが分かる。ライフサイクル後半302では、大きな誤差量があり、誤差時間の分布は大きな広がりを見せていることが分かる。このようなライフサイクル後半の分布を全て満たすようなタイミングでキャリッジ102の駆動を開始するならば、クロス制御による効果は小さいものとなる。
【0030】
図4は搬送速度の目標値及び実際の速度(実速度)の波形を示した図である。図中実線が目標値で、点線が実速度波形となる。目標値に比べ、実速度波形は一定の遅延時間を持って追従し、かつ負荷変動等によるばらつきを持つ。搬送時間は所定の記録用紙搬送量を満たしうる目標値が必要となる。この搬送時間の目標値をTLFとする。TLFに対する実際の搬送時間は図中点線ように偏差を持ってばらつくものとなる。これらの実際の搬送時間と目標値TLFとの差を搬送偏差時間TLFD1〜3として、これらの値より算出した平均値等の搬送偏差時間の推定値TLFDを求められる。これに次に行われる搬送における目標値TLFを加算してRTLFが求められ、搬送時間が推定される。
【0031】
<クロス制御のためのキャリッジ制御>
図5はキャリッジ102の速度の目標値及び実際の速度(実速度)の波形を示した図である。図中実線が目標値で、点線が実速度波形となる。目標値に比べ、実速度波形は一定の遅延時間を持って追従し、負荷変動等によるばらつきを持つ。なお、図中では、記録ヘッド101が記録領域に達するまでの時間が遅れていることを明示的に説明するために、各パターンの最高速度を縦軸方向にずらしているが、実際は同じ速度である。キャリッジ102は、記録ヘッド101が記録領域に達するまでの空走時間が必要となる。このキャリッジ102の空走時間の目標値をTCRとし、実際の空走時間と目標値TCRとの差を空走偏差時間TCRD1〜3とする。これらの値TCRD1〜3より空走偏差時間の推定値TCRDを求め、これに次に行われるキャリッジ102の駆動における目標値TCRを加算してRTCRが求められ、空走時間が推定される。
【0032】
ここで得られた値RLFD及びRTCRより、クロス制御のためのキャリッジ102の駆動開始タイミングが決定される。本実施形態においては、搬送開始後RLFD−RTCRの時間が経過したらキャリッジ102の駆動を開始する。
【0033】
<駆動制御系の構成>
図6は、本実施形態における駆動制御系の構成を示すブロック図である。図中コントローラ600はROM601、RAM602、MPU603、特殊用途集積回路(ASIC)604、搬送タイマ615、キャリッジタイマ625等を具備し、システムバス605を介してそれぞれが通信可能に接続されている。
【0034】
ROM601は、後述する制御シーケンスに対応したプログラム、所要のテーブル、その他の固定データを格納する。RAM602は、画像データの展開領域やプログラム実行のための作業用領域等として用いられ、本実施形態では、記録速度に関するユーザの指示、搬送偏差時間の測定値及び空走偏差時間の測定値等の履歴情報を格納する記憶手段となる。なお、例えば搬送時間について、搬送量毎の履歴保存や、搬送速度毎の履歴保存など、搬送時間のばらつきの特徴に応じたデータ保存のあり方が考えられる。最も簡単なやり方としては、これらの搬送偏差時間を区別せずに記録する方法となる。
【0035】
MPU603は、RAM602等に記憶された情報から、ROM601に記憶されたプログラム等を用いて、本実施形態で必要な演算を行う。例えば、搬送量に基づいて目標搬送時間生成(TLF生成)、及びキャリッジモータ105の駆動を開始する時の記録ヘッド101の位置から記録領域までの距離に基づいて目標空走時間生成(TCR生成)を行う。さらに、RAM602に記憶された動作の履歴情報に基づいて搬送時間推定及び空走時間推定等も行う。なお、搬送速度を変更できる場合は、搬送速度も変数としてTLFが導出され、キャリッジの速度を変更できる場合は、キャリッジの速度も変数としてTCRが導出される。さらに、搬送量はマルチパスまたは通常の記録モードの切り替え等により変更することができる(マルチパスの場合、搬送量は少なくなる)。
【0036】
ASIC604は、搬送制御手段かつキャリッジモータ駆動制御手段である。以下にASICによる搬送側及びキャリッジ駆動側の制御ループを説明する。
【0037】
搬送側について、ASIC604は、MPU603からの動作目標、搬送エンコーダ117からの搬送位置情報PLF、及び速度情報VLFが入力される。動作目標はROM601に記憶されたプログラムをMPU603が実行することにより生成される。搬送モータ107は、フィードバック制御されており、搬送ローラ110の回転速度または位置(回転角)の目標値と、速度情報VLFまたは位置情報PLFとの差分値から操作量となるPWM値PWMLFを計算する。計算されたPWM値PWMLFは搬送モータドライバ614に出力され、搬送モータドライバ614は搬送モータ107に操作量に応じた電流を流して搬送モータ107を駆動させる。
【0038】
キャリッジ駆動側について、ASIC604は、MPU603からの動作目標、キャリッジエンコーダ118からのキャリッジ位置情報PCR、及び速度情報VCRが入力される。動作目標はROM601に記憶されたプログラムをMPU603が実行することにより生成される。キャリッジモータ105は、フィードバック制御されており、キャリッジ102の速度または位置の目標値と、速度情報VCRまたは位置情報PCRとの差分値から操作量となるPWM値PWMCRを計算する。計算されたPWM値PWMCRはキャリッジモータドライバ624に出力され、キャリッジモータドライバ624はキャリッジモータ105に操作量に応じた電流を流してキャリッジモータ105を駆動させる。
【0039】
搬送タイマ615は、搬送モータ107が駆動を開始した時から、記録用紙を所定の搬送量だけ搬送し、搬送ローラ110が停止する時までの搬送時間を測定する搬送時間測定手段である。具体的には、搬送モータ107が駆動を開始する時に、MPU603から信号を受け取ることにより測定を開始し、搬送エンコーダ117から速度情報VLFを受け取り、速度情報VLF=0となった時に測定を終了する。さらに、測定された搬送時間MTLFと目標値TLFとの差から、MPU603によって搬送偏差時間生成が行われる。搬送偏差時間は搬送毎にRAM602に格納され、履歴情報TLFD1、TLFD2・・・TLFDNとしてN回分格納される。なお、搬送時間の履歴情報のうち、最大値または最小値のみを用いてRTLFを取得する場合等、実施条件によっては、すでに記憶されている搬送偏差時間よりも大きいまたは小さいときのみ値を更新してもよい。
【0040】
キャリッジタイマ625は、キャリッジモータ105の駆動を開始した時から記録ヘッド101が記録領域に達する時までの空走時間を測定する空走時間測定手段である。具体的には、キャリッジモータ105の駆動を開始する時に、MPU603から信号を受け取ることにより測定を開始し、キャリッジエンコーダ118から位置情報PCRを受け取り、記録ヘッド101が記録領域に達したことを示す値となった時に測定を終了する。さらに、測定された空走時間MTCRと目標値TCRとの差から、MPU603によって空走偏差時間生成が行われる。空走偏差時間はキャリッジ102の駆動毎にRAM602に格納され、履歴情報TCRD1、TCRD2・・・TCRDMとしてM回分記憶される。なお、TLFの場合と同様、実施条件によっては、すでに記憶されている空走偏差時間よりも大きいまたは小さいときのみ値を更新してもよい。
【0041】
ホスト装置630は、画像データの供給源となる外部装置(コンピュータ、画像読取用のリーダやデジタルカメラなど)であり、例えば、ホスト装置などと総称される。ホスト装置630と記録装置との間では、インターフェース(I/F)631を介して画像データ、コマンド、ステータス信号等の授受が行なわれる。さらに、ユーザはホスト装置630を用いて記録装置に対して、記録用紙及び記録品質等の指定をすることで、記録速度を指定するための指示を行う。
【0042】
操作部640は、記録装置に備えられており、入力キー641、ディスプレイ642、ランプ643等から構成される。例えば、ディスプレイ642には、スタックされている記録情報、メンテナンス情報等が表示され、ユーザは入力キーによりディスプレイ642に表示されているスタックの削除、メンテナンス情報に従ってメンテナンスのための操作等を行う。また、ランプ643には、ユーザに用紙づまり等の警告をするために点灯する。
【0043】
<搬送時間及び空走時間の推定>
クロス制御を行う場合、搬送時間の推定値から空走時間の推定値を差し引いた時間RTLF−RTCRが搬送開始からキャリッジ駆動までの待機時間となる。搬送モータ107が駆動を開始した時から、待機時間が経過した場合にMPU603がキャリッジモータ105の駆動を開始させる。以下、キャリッジの駆動開始のタイミングを決定するために必要なこれらの値RTLFおよびRTCRの算出方法について説明する。
【0044】
搬送時間推定は、MPU603がROM601に記憶されたプログラムを実行し、搬送時間の目標値に搬送偏差時間の推定値を加算することによって行われる(RTLF=TLF+TLFD)。搬送時間の推定値は、ホスト装置630からのユーザの指示、及びRAM602に格納された搬送偏差時間の履歴情報に基づいて異なる値が算出され、この値が大きいほど、キャリッジの駆動タイミングが遅くなり、結果的に記録時間も長くなる。すなわち、本実施形態では、ホスト装置630からのユーザの指示、及びRAM602に格納された搬送偏差時間の履歴情報から記録速度が指定され、指定された記録速度に応じてた搬送時間が推定されことになる。
【0045】
搬送時間の目標値TLFは、搬送量によって決まる所定の値であるため、搬送偏差時間の推定値TLFDを調節することで、搬送時間の推定値を調節する。本実施形態では、搬送偏差時間推定は3通りの算出式により行うことが可能で、MPU603は、指定された記録速度に応じたいずれか1つの算出式に基づきTLFDを算出する。具体的なシーケンスについては後述する。
【0046】
TLFDはRAM602に記憶された複数の搬送偏差時間(TLFD1、TLFD2・・・TLFDN)に基づいて求められる。図7、図8は搬送偏差時間の推定値の算出方法の一例を示したものとなる。本実施形態では、算出式1を用いる場合は斜行記録の可能性が最も高く、算出式3を用いる場合は斜行記録の可能性が最も低いものとしている。斜行記録の可能性が高いものほど、搬送動作と、キャリッジの動作が深く重なる(キャリッジの駆動タイミングが早くなる)ものになるが、記録速度の面では有利になる。
【0047】
図7の例では、算出式1が用いられた場合、TLFD1〜Nの平均値に標準偏差を加えた値がTLFDとされる。算出式2が用いられた場合、TLFD1〜Nの平均値に、標準偏差、及び所定のマージン1を加えた値がTLFDとされる。算出式3が用いられた場合、TLFD1〜Nの最大値に所定のマージン2を加えた値がTLFDとされる。なお、この例では、どのモードでも同一のエンコーダパルス分解能を用いて、搬送偏差時間が推定される。このエンコーダパルス分解能は、記録用紙毎に異なる、搬送誤差に対する画像劣化の視認限界から決定される。
【0048】
図8の例では、算出式1が用いられた場合、TLFD1〜Nの最大値に、標準偏差、及びマージン3を加えた値がTLFDとされる。算出式2が用いられた場合、TLFD1〜Nの最大値に、標準偏差、及びマージン4(>マージン3)を加えた値がTLFDとされる。算出式3が用いられた場合、TLFD1〜Nの最大値に所定のマージン2(マージン2は、標準偏差とマージン4との和より大きい)を加えた値がTLFDとされる。この例では、算出式1、2と算出式3とで異なるエンコーダパルス分解能を用いて、搬送偏差時間が推定される。
【0049】
なお、これらの算出式は本実施形態における例に過ぎず、算出式の数は2または4つ以上でもよい。さらには1つの算出式で、マージンの量をユーザが指定した速度に応じて調整するようにしてもよい。この場合、マージンの算出方法として、例えば、ユーザが単位時間当たりの記録枚数を指定して、その逆数を記録速度としてこれに基づきマージン量を算出する等の方法がある。
【0050】
算出式1〜3のいずれを用いるか選択する構成について説明する。ホスト装置630からのユーザ入力により、記録用紙、記録品質等の記録速度に関わる記録条件が指定される。記録条件はインターフェース631を介して、RAM602に入力、記憶される。MPU603はRAM602に記憶された搬送偏差時間から搬送偏差時間の正規分布や異常値の有無等の履歴情報を取得する。MPU603は記録条件及び履歴情報に基づいて、何れの算出式を用いるかを決定する。本実施形態では、条件によっては、何れの算出式も選択せず、MPU603はクロス制御を行わない構成としている。なお、空走偏差時間の履歴情報も記録条件としてよい。
【0051】
図9は記録条件と用いる算出式の関係の一例を示したものである。クロス制御モードは、搬送偏差時間の履歴情報に基づいて決定される条件で、例えば搬送偏差時間の正規分布や異常値の有無等応じて、標準または安全モードに決定される。生産性最重視の普通紙−速い、標準などでは、標準モードでは時間短縮効果の高い算出式1が設定され、安全モードでは算出式2が割り振られている。普通紙でも記録品質を重視する普通紙−きれいでは、標準モードでは算出式3、安全モードではクロス制御OFFを割り振るものとしている。実際には、記録品質が高い記録モードでは、記録画像の形成がマルチパスで行われることが多い。これは、そもそもとして搬送時間が短くなることを示しており、クロス制御をOFFにしたところで、記録速度に与える影響が少ないことを示している。記録品質が最優先される光沢紙においては、光沢紙−標準では、標準モードでは算出式2、安全モードでは算出式3が設定される。光沢紙−最高では、最初からクロス制御はOFFとして、確実に斜行記録が発生しないようにしている。コート紙については、普通紙と光沢紙の間となる設定となっている。
【0052】
なお、記録条件と算出式及びクロス制御のON/OFFとの関係はこれに限られず、例えば搬送偏差時間の分布が小さい場合は、常にクロス制御を有効にするような構成も考えられる。また、記録媒体がロール紙となる場合は、ロール紙直径の変動に合わせ、記録条件を設定する構成も考えられる。
【0053】
再び図6を参照し、空走時間の推定について説明する。空走時間推定は、MPU603がROM601に記憶されたプログラムを実行し、空走時間の目標値に空走偏差時間の推定値を加算することによって行われる(RTCR=TCR+TCRD)。具体的なシーケンスについては後述する。
【0054】
TCRDは、RAM602に記憶された複数の空走偏差時間(TCRD1、TCRD2・・・TCRDM)から、MPU603により算出される。なお、本実施形態では、空走偏差時間の履歴情報TCRD1、TCRD2・・・TCRDMのうち、最小のものをTCRDとして選択する。
【0055】
<駆動制御のシーケンス>
図10は、本実施形態に係る記録装置の記録動作でのキャリッジ駆動と搬送のシーケンスを示す図である。
【0056】
プリンタに電源が入った後、プリンタドライバなどから記録命令が発せられ、記録動作が開始となる。S1000では、MPU603が、ユーザが選択した記録用紙の種別及び記録品質等のRAM602に記憶されている記録条件取得を行う。S1001では、MPU603が、記録条件に基づき、算出モードを選択する。この際併せて、搬送偏差時間及び空走偏差時間の履歴情報も参照し、過去の搬送において、極端な遅延が発生する傾向があった場合等、分布が異常である場合、安全モードで搬送偏差時間を推定するための識別フラグも求められることになる。安全モードとするための判定基準について、最も厳密な場合は、搬送偏差時間が所定の許容量を一回でも超えた場合に、安全モードの移行することが考えられる。また、搬送誤差がある程度許容できるものについては、搬送偏差時間の標準偏差が閾値を超えた場合等とする考え方もある。提供すべき記録品質と生産性に応じて、最適判断方法が決まるものとなる。
【0057】
S1002では、例えば、記録用紙の種別が図9のテーブルにない場合等において、最初からクロス制御自体を行わないようにするため、クロス制御を行わないシーケンス(No)が選択される。一方、クロス制御を行うシーケンスが選択された場合には、S1003においてMPU603によりTLFDの算出が実行される。TLFDの算出は図11のシーケンスのとおりで、以下に説明する。
【0058】
TLFD算出(S1003)が開始されると、まずS1027において、過去の搬送偏差時間の分布等の搬送偏差時間の履歴が取得される。また、ここから、前回の搬送で選択されたTLFD等の履歴データも確認される。
【0059】
S1001で求められた算出モードが、算出モードAであった場合(Yes)には、S1028において算出モードAが選択され、S1029において安全モードの発生確認を行う。S1029で標準モードと判別された場合(No)には、S1030において、算出式1によりTLFDが算出される。安全モードと判別された場合(Yes)には、S1031において、算出式2によりTLFDが算出される。
【0060】
S1028において、算出モードAが選択されなかった場合(No)には、S1032において、算出モードBに該当するか否かの判定が行われる。算出モードBが選択された場合(Yes)には、S1033において、安全モードの発生確認が行われる。S1033で標準モードと判別された場合(No)には、S1034において、算出式3によりTLFDが算出される。安全モードと判別された場合(Yes)には、S1035において、クロス制御はOFFとなり実行されない。
【0061】
S1032において、算出モードBが選択されなかった場合(No)には、S1036において、状態不定と判断し、クロス制御はOFFとなり実行されない。このようなシーケンスにより、搬送偏差時間の推定値TLFDあるいはクロス制御のOFFが決定されて、S1037において、図11のシーケンスが終了する。
【0062】
図10に戻る。S1004において図11に示すシーケンス(S1003)の結果を受け、再度クロス制御のON/OFF判定を実行する。クロス制御が有効な場合には、S1005において、指定された搬送量に基づいて得られた搬送時間の目標値TLFが取得され、その値にS1003で算出されたTLFDが加算され、搬送時間推定が行われる(RTLF=TLF+TLFD)。その後、S1006において搬送が開始され、S1007において時間が経過するごとに(制御ループが実行されるごとに)RTLFが減算されていく。
【0063】
搬送開始後に、S1008において、キャリッジ駆動命令が発生すると、S1009において、MPU603により記録ヘッド101の現在位置から記録領域までの距離に基づいて空走時間の目標値TCRが生成される。さらに、過去M回分のキャリッジ駆動における空走偏差時間TCRD1〜Mの履歴情報の中から最小値となる値がTCRDとして選択される。
【0064】
S1010において、MPU603がTCRとTCRDとを加算し、空走時間推定が行われ、推定されたRTCRと現在のRTLFとが比較される。RTCRがRTLF以上である場合(Yes)には、キャリッジ102の駆動を開始する条件が整ったと判断し、S1012においてMPU603がキャリッジ102の駆動を開始させる。RTCRよりもRTLFの方が大きい場合(No)には、所定時間分RTLFが減算され、再度S1010にてRTCRとRTLFを比較する流れとなる。
【0065】
S1013において、MPU603が搬送モータ107の駆動を終了させ、搬送ローラ110が停止する。キャリッジ102は、記録ヘッド101が記録領域外に達して記録が停止すると、S1014において、MPU603がキャリッジモータ105の駆動を終了させ、キャリッジ102は停止する。その後、S1015において、測定された搬送時間MTLFと目標値TLFとの差である搬送偏差時間生成、及び測定された空走時間MTCRと目標値TCRとの差である空走偏差時間生成が行われる。ここで生成された搬送偏差時間または空走偏差時間から判断して、クロス制御を行うにあたり斜行記録を行う可能性が高い場合には、次回以降のクロス制御を安全モードとして実行される(安全モードの判別)。S1016において、ここで得られた搬送偏差時間及び空走偏差時間はRAM602に保存され、履歴情報が更新される。S1017において、今回の動作でページ内の全ての記録が完了している場合には、S1026で記録が完了する。記録が完了していない場合には、再度S1003に戻り、記録が行われる。
【0066】
S1002及びS1004において、クロス制御を実行しない場合(No)が選択された場合を説明する。この場合には、搬送ローラ110が停止したことを確認した後に、キャリッジ102を駆動するが、搬送偏差時間及び空走偏差時間を取得し、履歴情報を更新する必要はある。そのため、S1018において、動作開始前に、それぞれの動作時間の目標値TLF及びTCRを生成する。そして、S1019において、搬送が開始され、S1020において、MPU603が搬送モータ107の駆動を終了させ、搬送ローラ110が停止する。搬送ローラ110の停止後、S1021において、搬送エンコーダ117からASIC604を介して信号を受信したMPU603がキャリッジ102の駆動を開始させる。キャリッジ102は、記録ヘッド101が記録領域外に達して記録が停止すると、S1022において、キャリッジモータ105の駆動が終了し、キャリッジ102は停止する。その後、S1023において、S1015と同様に搬送偏差時間及び空走偏差時間の生成、及び安全モードの判別が行われ、S1024において、ここで得られた搬送偏差時間及び空走偏差時間はRAM602に保存され、履歴情報が更新される。S1025において、今回の動作でページ内の全ての記録が完了している場合には、S1026で記録が完了する。記録が完了していない場合には、再度S1018に戻り、記録が行われる。
【0067】
<本実施形態の効果及び他の実施形態>
本実施形態では、ユーザは記録媒体の種類(ロール紙の場合はその残量)、及び記録品質を指定することで、記録速度が指定されることになる。さらに、搬送の履歴情報に応じて搬送時間を推定するための算出式が選択され、場合によってはクロス制御をOFFにすることもできる。したがって、本実施形態により、ユーザの要求、さらには記録装置の状態等に対して、適切なクロス制御を行う記録装置が提供される。
【0068】
また、本実施形態においては、搬送及びキャリッジ駆動の履歴情報として、測定値と目標値との差である偏差時間が用いられ、これをもとに搬送及び空走時間が推定される。そのため、1回の搬送量、及び用紙のサイズ(記録領域の大きさ)を変更した場合であっても、すなわちTLF、TCRを変更しても、変更前の履歴情報を用いた推定は有効である。しかし、これに限らず、例えば搬送量を調節する機能を有さず、記録領域を変更することができない記録装置等においては、偏差時間を求めずに、搬送時間及び空走時間の測定値を履歴情報として、搬送時間推定及び空走時間推定を行うことも可能である。
【0069】
さらに、搬送側での制御についても、記録終了と同時に搬送を開始する構成としてもよい。具体的には、MPU603が、キャリッジエンコーダ118からの位置情報PCRをASIC604を介して受け取り、記録終了と判断すると同時に、ASIC604に搬送を開始するための信号を送信する。この構成により、例えば、記録ヘッド101が記録領域を出て、記録を停止した時にMPU603が搬送を開始させることもできる。このような制御により、記録中に搬送が開始されることを防止することができるだけでなく、記録を停止した時からキャリッジ102が停止する時までの時間の無駄が削減される。
【特許請求の範囲】
【請求項1】
搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置であって、
外部装置からインターフェースを介してユーザの指示を受信する受信手段と、
前記ユーザの指示に基づいて記録速度を指定する指定手段と、
前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定する搬送時間測定手段と、
前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定する搬送時間推定手段と、
前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定する空走時間測定手段と、
前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定する空走時間推定手段と、
を備え、
前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始する
ことを特徴とする記録装置。
【請求項2】
前記搬送時間推定手段は、複数の算出式により前記搬送時間を推定することが可能であり、前記複数の算出式のうち、前記指定された記録速度に応じたいずれか1つの算出式により前記搬送時間の推定をすることを特徴とする請求項1に記載の記録装置。
【請求項3】
前記指定手段は、前記ユーザの指示及び前記測定された搬送時間に基づいて前記記録速度を指定することを特徴とする請求項1または2に記載の記録装置。
【請求項4】
前記測定された搬送時間を記憶する記憶手段を備え、
前記記憶手段には前記搬送毎に測定された複数の前記搬送時間が記憶されており、前記複数の搬送時間から前記搬送時間の推定が行われることを特徴とする請求項1乃至3のいずれか1項に記載の記録装置。
【請求項5】
前記記憶手段には前記キャリッジの駆動毎に前記測定された複数の前記空走時間が記憶されており、前記複数の空走時間から前記空走時間の推定が行われることを特徴とする請求項4に記載の記録装置。
【請求項6】
前記搬送量に基づいて、前記搬送時間の目標値を生成する目標搬送時間生成手段と、
前記測定された搬送時間から前記搬送時間の目標値を差し引いた値を搬送偏差時間として生成する搬送偏差時間生成手段と、
前記キャリッジモータの駆動を開始する時の前記記録ヘッドの位置から前記記録領域までの距離に基づいて、前記空走時間の目標値を生成する目標空走時間生成手段と、
前記測定された空走時間から前記空走時間の目標値を差し引いた値を空走偏差時間として生成する空走偏差時間生成手段と、
を備え、
前記搬送時間推定手段は、前記搬送偏差時間から次に行われる搬送における搬送偏差時間を推定し、該推定された搬送偏差時間に次に行われる搬送における前記搬送時間の目標値を加算させて、前記搬送時間を推定し、
前記空走時間推定手段は、前記空走偏差時間から次に行われる前記キャリッジの駆動における空走偏差時間を推定し、該推定された空走偏差時間に次に行われる前記キャリッジモータの駆動における前記空走時間の目標値を加算して、前記空走時間を推定する
ことを特徴とする請求項1乃至3のいずれか1項に記載の記録装置。
【請求項7】
前記生成された搬送偏差時間を記憶する記憶手段を備え、
前記記憶手段には前記搬送毎に前記生成された複数の前記搬送偏差時間が記憶されており、前記複数の搬送偏差時間から前記搬送偏差時間の推定が行われることを特徴とする請求項6に記載の記録装置。
【請求項8】
前記記憶手段には前記キャリッジの駆動毎に前記生成された複数の前記空走偏差時間が記憶されており、前記複数の空走偏差時間から、前記空走偏差時間の推定が行われることを特徴とする請求項7に記載の記録装置。
【請求項9】
搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置におけるモータの駆動制御方法であって、
外部装置からインターフェースを介してユーザの指示を受信し、
前記ユーザの指示に基づいて記録速度を指定し、
前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定し、
前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定し、
前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、
前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定し、
前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始する
ことを特徴とする方法。
【請求項10】
搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置におけるモータの駆動制御方法であって、
外部装置からインターフェースを介してユーザの指示を受信し、
前記ユーザの指示に基づいて記録速度を指定し、
前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定し、
前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定し、
前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定し、
前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、
前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始する
ことを特徴とする方法。
【請求項1】
搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置であって、
外部装置からインターフェースを介してユーザの指示を受信する受信手段と、
前記ユーザの指示に基づいて記録速度を指定する指定手段と、
前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定する搬送時間測定手段と、
前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定する搬送時間推定手段と、
前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定する空走時間測定手段と、
前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定する空走時間推定手段と、
を備え、
前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始する
ことを特徴とする記録装置。
【請求項2】
前記搬送時間推定手段は、複数の算出式により前記搬送時間を推定することが可能であり、前記複数の算出式のうち、前記指定された記録速度に応じたいずれか1つの算出式により前記搬送時間の推定をすることを特徴とする請求項1に記載の記録装置。
【請求項3】
前記指定手段は、前記ユーザの指示及び前記測定された搬送時間に基づいて前記記録速度を指定することを特徴とする請求項1または2に記載の記録装置。
【請求項4】
前記測定された搬送時間を記憶する記憶手段を備え、
前記記憶手段には前記搬送毎に測定された複数の前記搬送時間が記憶されており、前記複数の搬送時間から前記搬送時間の推定が行われることを特徴とする請求項1乃至3のいずれか1項に記載の記録装置。
【請求項5】
前記記憶手段には前記キャリッジの駆動毎に前記測定された複数の前記空走時間が記憶されており、前記複数の空走時間から前記空走時間の推定が行われることを特徴とする請求項4に記載の記録装置。
【請求項6】
前記搬送量に基づいて、前記搬送時間の目標値を生成する目標搬送時間生成手段と、
前記測定された搬送時間から前記搬送時間の目標値を差し引いた値を搬送偏差時間として生成する搬送偏差時間生成手段と、
前記キャリッジモータの駆動を開始する時の前記記録ヘッドの位置から前記記録領域までの距離に基づいて、前記空走時間の目標値を生成する目標空走時間生成手段と、
前記測定された空走時間から前記空走時間の目標値を差し引いた値を空走偏差時間として生成する空走偏差時間生成手段と、
を備え、
前記搬送時間推定手段は、前記搬送偏差時間から次に行われる搬送における搬送偏差時間を推定し、該推定された搬送偏差時間に次に行われる搬送における前記搬送時間の目標値を加算させて、前記搬送時間を推定し、
前記空走時間推定手段は、前記空走偏差時間から次に行われる前記キャリッジの駆動における空走偏差時間を推定し、該推定された空走偏差時間に次に行われる前記キャリッジモータの駆動における前記空走時間の目標値を加算して、前記空走時間を推定する
ことを特徴とする請求項1乃至3のいずれか1項に記載の記録装置。
【請求項7】
前記生成された搬送偏差時間を記憶する記憶手段を備え、
前記記憶手段には前記搬送毎に前記生成された複数の前記搬送偏差時間が記憶されており、前記複数の搬送偏差時間から前記搬送偏差時間の推定が行われることを特徴とする請求項6に記載の記録装置。
【請求項8】
前記記憶手段には前記キャリッジの駆動毎に前記生成された複数の前記空走偏差時間が記憶されており、前記複数の空走偏差時間から、前記空走偏差時間の推定が行われることを特徴とする請求項7に記載の記録装置。
【請求項9】
搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置におけるモータの駆動制御方法であって、
外部装置からインターフェースを介してユーザの指示を受信し、
前記ユーザの指示に基づいて記録速度を指定し、
前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定し、
前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定し、
前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、
前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定し、
前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始する
ことを特徴とする方法。
【請求項10】
搬送モータにより、搬送ローラを駆動することで記録媒体を第1の方向へ間欠搬送し、キャリッジモータにより、記録ヘッドを搭載したキャリッジを前記間欠搬送のタイミングに合わせて第2の方向に往復移動させながら、前記記録媒体の記録領域に記録を行う記録装置におけるモータの駆動制御方法であって、
外部装置からインターフェースを介してユーザの指示を受信し、
前記ユーザの指示に基づいて記録速度を指定し、
前記搬送モータが駆動を開始してから、前記記録媒体を所定の搬送量だけ搬送し、前記搬送ローラが停止するまでの搬送時間を測定し、
前記キャリッジモータの駆動を開始してから前記記録ヘッドが前記記録領域に達するまでの空走時間を測定し、
前記測定された空走時間に基づいて次に行われる前記キャリッジの駆動における空走時間を推定し、
前記測定された搬送時間と前記指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、
前記推定された搬送時間をRTLF、前記推定された空走時間をRTCRとして、前記搬送を開始してから、RTLF−RTCRとなる時間が経過したら前記キャリッジモータが駆動を開始する
ことを特徴とする方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−75495(P2013−75495A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−218318(P2011−218318)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]