
記録装置
【課題】記録媒体を搬送する搬送ローラの撓みを低減または除去することで、記録媒体の搬送精度の低下を抑制する。
【解決手段】記録装置1は、記録媒体を搬送方向に搬送する用紙搬送機構と、用紙搬送機構の制御を行う搬送制御部とを有し、用紙搬送機構は、記録ヘッド31よりも搬送方向上流側の第1の搬送手段10と、記録ヘッドよりも搬送方向下流側の第2の搬送手段20と、第1の搬送手段10を駆動する駆動手段51と、駆動手段51の駆動力を伝達する駆動経路上に設けられた駆動力遮断手段55aと、を有し、搬送制御部は、記録媒体が第1および第2の搬送手段10,20とによって搬送方向に搬送されているときに、記録媒体の搬送方向上流側の端部が第1の搬送手段10を通過する直前に、記録媒体を第1の搬送手段10によって搬送方向と反対方向に搬送させ、駆動力遮断手段55aに予め設定された値以上の駆動力を作用させるようになっている。
【解決手段】記録装置1は、記録媒体を搬送方向に搬送する用紙搬送機構と、用紙搬送機構の制御を行う搬送制御部とを有し、用紙搬送機構は、記録ヘッド31よりも搬送方向上流側の第1の搬送手段10と、記録ヘッドよりも搬送方向下流側の第2の搬送手段20と、第1の搬送手段10を駆動する駆動手段51と、駆動手段51の駆動力を伝達する駆動経路上に設けられた駆動力遮断手段55aと、を有し、搬送制御部は、記録媒体が第1および第2の搬送手段10,20とによって搬送方向に搬送されているときに、記録媒体の搬送方向上流側の端部が第1の搬送手段10を通過する直前に、記録媒体を第1の搬送手段10によって搬送方向と反対方向に搬送させ、駆動力遮断手段55aに予め設定された値以上の駆動力を作用させるようになっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は記録装置に関し、特に、記録媒体が2つの搬送手段によって搬送される記録装置に関する。
【背景技術】
【0002】
インクジェットプリンタ(記録装置)では、インクを吐出して画像を記録する記録ヘッドを走査方向に走査させる動作と、その走査方向と交差する搬送方向に記録媒体(以下、「用紙」とする)を搬送する搬送動作とが繰り返されて、用紙への画像記録が行われる。
【0003】
用紙を搬送する搬送動作は、記録ヘッドよりも搬送方向の上流側に配置された第1の搬送手段と、記録ヘッドよりも搬送方向の下流側に配置された第2の搬送手段とによって行われている。第1の搬送手段では、メインの搬送ローラとして、金属シャフトに例えばセラミックをコーティングした高精度ローラが用いられ、その軸上に設けられた位置検知手段(コードホイールとエンコーダセンサ)によりDCモータが制御されている。これにより、インクジェットプリンタでは、高精度な用紙搬送が可能となり、記録画像の高画質化が実現されている。しかしながら、用紙の搬送精度を搬送ローラの加工精度に頼るのは限界にきており、その対策としてローラの偏心補正などが実施されている。
【0004】
また、第2の搬送手段では、インクが吐出された後の用紙を搬送するため、先端の尖った星形の拍車と呼ばれる従動コロが用いられ、その搬送ローラとして、拍車の先端にダメージを与えない弾性体であるゴムローラが用いられている。したがって、第2の搬送手段において偏心補正を行っても、第1の搬送手段ほどの搬送精度が得られないのが現状である。
【0005】
一方、用紙の搬送精度に関して、用紙搬送が前述した2つの搬送手段で行われる場合には、特に考慮すべき事項がある。この用紙搬送動作は、第1の搬送手段のみによって搬送される第1の搬送動作と、第1の搬送手段と第2の搬送手段とによって搬送される第2の搬送動作と、第2の搬送手段のみによって搬送される第3の搬送動作とに分けることができる。このうち、用紙搬送動作が第2の搬送動作から第3の搬送動作へ切り替わる時に、種々の要因により、第1および第2の搬送動作の場合よりも、用紙の搬送精度が落ちることが一般的に知られている。その要因としては、搬送ローラの精度ずれだけでなく、搬送ローラシャフトの撓みや、用紙が第1の搬送手段の搬送ローラを抜ける(通過する)際の挙動の不安定さなどが挙げられる。
【0006】
これら用紙の搬送精度を低下させる要因のうち、搬送ローラシャフトの撓みによるものについて説明する。第2の搬送動作では、搬送性を安定させるために、第1の搬送手段の用紙搬送速度V1と第2の搬送手段の用紙搬送速度V2とは、V1>V2の関係を満たしている。これにより、用紙は、第1の搬送手段と第2の搬送手段との間に配置されたプラテンに押し付けられ、記録ヘッドに対して安定した位置で搬送される。しかしながら、このとき用紙にかかるプラテンからの反力は、第1および第2の搬送手段のそれぞれの搬送ローラにもかかり、この反力により、搬送ローラに撓みが発生する。そして、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる、すなわち、用紙の後端が第1の搬送手段の搬送ローラを通過すると、用紙にかかる反力は解放される。それにより、第2の搬送手段の搬送ローラの撓みは元に戻り、その分だけ搬送量に誤差が生じることになる。
【0007】
このような搬送動作の切り替わり時に発生する用紙の搬送精度の低下を軽減するために、いくつかの提案がなされている。例えば、特許文献1では、第2の搬送動作から第3の搬送動作への切り替わり時の搬送量を補正する補正値をテストパターンの実測により求め、この補正値により搬送量を補正する技術が提案されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−7817号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1に記載の方法では、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる時の搬送量の補正値は固定値であり、すなわち、常に固定の補正値を用いた搬送量の補正制御が実施されている。そのため、搬送動作ごとに搬送量の誤差が変動する場合、その誤差を正確に補正することは困難である。特に搬送ローラの撓み量は、搬送ローラの偏心による用紙搬送速度や摩擦係数の変動など、種々の要因の変動により搬送動作ごとに変動するため、結果として搬送動作切り替わり時の搬送量の誤差を変動させることになる。
【0010】
そこで本発明は、記録媒体を搬送する搬送ローラの撓みを低減または除去することで、記録媒体の搬送精度の低下を抑制して、高精度な用紙搬送を実現する記録装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上述した課題を解決するために、本発明の記録装置は、インクを吐出して記録媒体に画像を記録する記録ヘッドの走査方向と交差する搬送方向に記録媒体を搬送する用紙搬送機構と、用紙搬送機構の制御を行う搬送制御部とを有している。用紙搬送機構は、記録ヘッドよりも搬送方向の上流側に配置された第1の搬送手段と、記録ヘッドよりも搬送方向の下流側に配置された第2の搬送手段と、第1の搬送手段を駆動する駆動手段と、第1の搬送手段から第2の搬送手段へ駆動手段の駆動力を伝達する駆動経路上に設けられ、記録媒体を搬送方向と反対方向に搬送させる、予め設定された値以上の駆動力の伝達を遮断する駆動力遮断手段と、を有している。第1および第2の搬送手段は、第1の搬送手段による記録媒体の搬送速度が、第2の搬送手段による記録媒体の搬送速度よりも速くなるようにされ、搬送制御部は、記録媒体が第1の搬送手段と第2の搬送手段とによって搬送方向に搬送されているときに、記録媒体の搬送方向上流側の端部が第1の搬送手段を通過する前に、一旦、記録媒体を第1の搬送手段によって反対方向に搬送させ、駆動力遮断手段に予め設定された値以上の駆動力を作用させるようになっている。
【発明の効果】
【0012】
以上、本発明によれば、記録媒体を搬送する搬送ローラの撓みを低減または除去することで、記録媒体の搬送精度の低下を抑制して、高精度な用紙搬送を実現する記録装置を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る記録装置の用紙搬送機構を示す斜視図である。
【図2】図1の記録装置の用紙搬送機構を部分的に示す斜視図である。
【図3】本実施形態の制御部とその周辺部の構成を示すブロック図である。
【図4】図1の記録装置の用紙搬送機構を示す断面図である。
【図5】本実施形態のEJローラの撓み量を実測した結果を示すグラフである。
【発明を実施するための形態】
【0014】
以下、図面を参照して、本発明の実施の形態について説明する。
【0015】
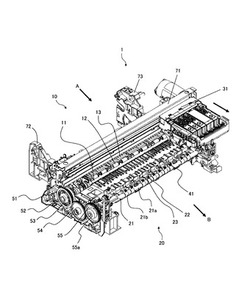
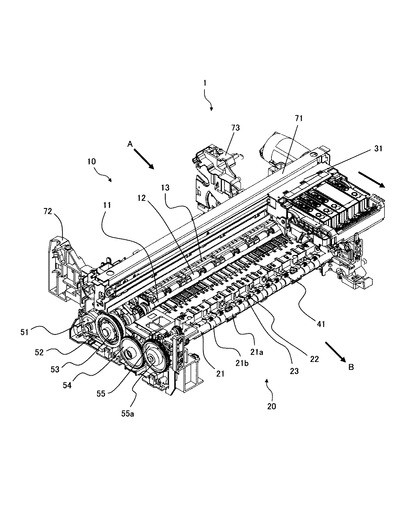
まず、図1および図2を参照して、本発明の一実施形態に係る記録装置における記録媒体(以下、「用紙」とする)の搬送機構について説明する。図1は、本実施形態の記録装置の用紙搬送機構を示す斜視図であり、図2は、図1の用紙搬送機構を部分的に示す斜視図である。
【0016】
本実施形態の記録装置1は、インクを吐出して記録媒体(以下、「用紙」とする)に画像を記録する記録ヘッド31の走査方向と交差する方向に用紙を搬送する用紙搬送機構を有している。用紙搬送機構は、記録ヘッド31よりも用紙搬送方向の上流側に配置された第1の搬送手段10と、記録ヘッド31よりも用紙搬送方向の下流側に配置された第2の搬送手段20とを有している。用紙は、給紙機構(図示せず)により矢印A(図1参照)の方向に給紙され、用紙搬送機構10,20により搬送されて、矢印Bの方向(図1参照)へ排紙される。以下、用紙搬送機構の第1および第2の搬送手段10,20を個別に説明する。
【0017】
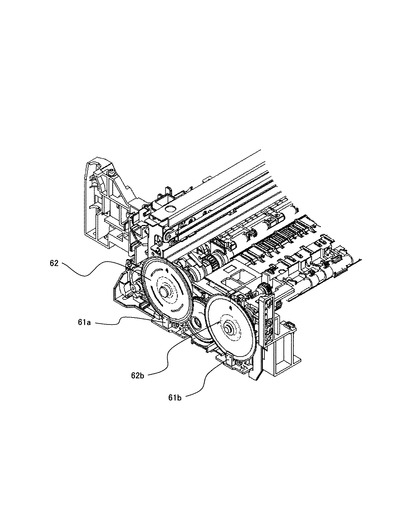
第1の搬送手段10は、レフトプレート72とライトプレート73とに保持されたLF(Line Feed)ローラ11と、バネ(図示せず)によってLEローラ11に押圧されたピンチローラ12と、を有している。ピンチローラ12は、シャーシ71に取り付けられたピンチローラホルダ13に保持され、図示した実施形態では、4個のピンチローラホルダ13に対して、8個のピンチローラ12が設けられている。また、LFローラ11の同軸上には、図2に示すように、LFローラ11に直結されたエンコーダホイール62aが設けられ、エンコーダセンサ61aによりLFローラ11の回転状態が読み取られるようになっている。本実施形態では、LFローラ11の用紙搬送部として、例えば膜厚約0.062mmのセラミックコーティングが施され、その直径は9.714±0.005mmである。また、ピンチローラ12の総圧は、例えば約25080mN(2560gf)である。LFローラ11の回転力は、DCモータからなる搬送モータ51の駆動力がタイミングベルト52を介してLFローラ11の軸上に設けられたLFプーリギア53に伝達されることによって得られている。
【0018】
第2の搬送手段20は、レフトプレート72とライトプレート73とに保持されたEJ(Eject)ローラ21と、EJローラ21に押圧された拍車22とを有している。拍車22は、スパーベース(図示せず)に保持された拍車バネ23に取り付けられ、図示した実施形態では、10個の拍車バネ23に対して、10個の拍車22が設けられている。拍車22は、星形の軸方向断面を有し、EJローラ21の用紙搬送部としては、拍車22の先端にダメージを与えない弾性体であるゴムローラ21bが用いられている。また、EJローラ21の同軸上には、図2に示すように、EJローラ21に直結されたエンコーダホイール62bが設けられ、エンコーダセンサ61bによりEJローラ21の回転状態が読み取られるようになっている。本実施形態では、EJローラ21は、例えば、ゴムローラ21bの直径が9.693±0.015mmであり、シャフト21aの直径が7±0.1mmである。また、ピンチローラ12の総圧は、例えば約4900mN(500gf)である。EJローラ21の回転力は、プーリ部とギア部とからなるLFプーリギア53のギア部からの駆動力がアイドラギア54を介してEJローラ21の軸上に設けられたEJ駆動ギア55に伝達されることによって得られている。また、EJ駆動ギア55には、トルクリミッター(駆動力遮断手段)55aが一体化され、EJローラ21に対して用紙搬送方向と反対方向に予め設定された値以上、例えば0.01N・m以上の負荷がかかるとその負荷を遮断するようになっている。なお、トルクリミッター55aは、本実施形態では、EJ駆動ギア55に一体化して配置されているが、EJローラ21の駆動経路上であれば、どこに配置されていてもよい。
【0019】
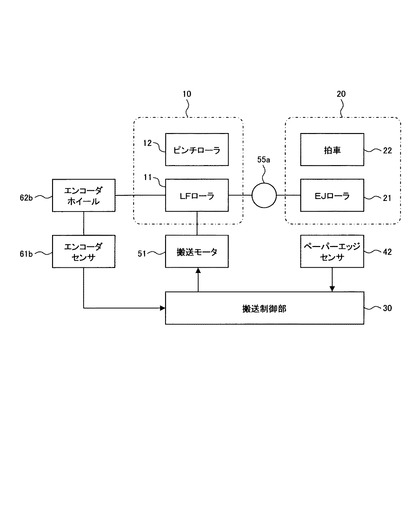
さらに、本実施形態の記録装置1は、搬送モータ51の駆動を制御して、用紙搬送機構10,20の用紙搬送動作を制御する搬送制御部30を有している。図3には、搬送制御部30とその周辺部のブロック図が示されている。
【0020】
次に、図1から図4を参照して、本実施形態の記録装置における用紙搬送動作および記録動作について説明する。図4は、本実施形態の記録装置の用紙搬送機構を示す断面図であり、図4(a)から図4(c)はそれぞれ、上述した第1から第3の搬送動作に対応する図である。
【0021】
まず、給紙機構により給紙された用紙Pは、搬送モータ51によって回転するLFローラ11と、ピンチローラ12とからなるローラ対で挟持され、搬送される。つまり、このとき用紙Pは、第1の搬送手段10(LFローラ11およびピンチローラ12)のみで搬送されており、この搬送動作が第1の搬送動作である(図4(a)参照)。
【0022】
用紙搬送が進んでいくと、用紙Pの前端(搬送方向下流側端部)は、搬送モータ51によって回転するEJローラ21と、拍車22とからなるローラ対で挟持される。したがって、用紙Pは、第1の搬送手段10(LFローラ11およびピンチローラ12)と第2の搬送手段20(EJローラ21および拍車22)とによって搬送されるようになる。この搬送動作が第2の搬送動作である(図4(b)参照)。
【0023】
さらに用紙搬送が進むと、用紙Pの後端(搬送方向上流側端部)は第1の搬送手段10(LFローラ11およびピンチローラ12)を通過する。そして、用紙Pは、第2の搬送手段20(EJローラ21および拍車22)のみで搬送されるようになる。この搬送動作が第3の搬送動作であり(図4(c)参照)、用紙Pの後端が第2の搬送手段20(EJローラ21および拍車22)を通過すると、第3の搬送動作は終了し、つまり用紙搬送動作は終了する。
【0024】
記録動作は次のように行われる。まず、第1の搬送動作中、第1の搬送手段10の搬送方向上流に設けられたペーパーエッジセンサ(記録媒体検知手段)42により、用紙Pの位置が検知される。そして、用紙Pが記録ヘッド31に対向するプラテン41上の所定の位置に到達したことが検知されると、搬送制御部30により、搬送モータ51の回転が停止され、したがって搬送動作が一時停止する。用紙Pが位置決めされると、記録ヘッド31は、用紙Pにインクを吐出しながら、用紙搬送方向と交差する方向に往復移動し、1往復分の画像を形成する。この1往復分の画像記録が終了すると、上述した搬送動作が再び開始され、その後、この搬送動作と記録動作とが繰り返されて、用紙Pに情報が順次記録されていく。
【0025】
本実施形態は、搬送モータ51とLFローラ11との回転比が4.5:1となり、LFローラ11とEJローラ21との回転比が1:1となるように構成されている。また、上述したように、LFローラ11の用紙搬送部の直径は9.714±0.005mmであり、EJローラ21の用紙搬送部であるゴムローラ21bの直径は9.693±0.015mmである。したがって、第1の搬送手段10の用紙搬送速度V1と第2の搬送手段20の用紙搬送速度V2とは、常にV1>V2の関係を満たしている。そのため、第2の搬送動作では、用紙Pの内側の方向に、つまり第1の搬送手段10と第2の搬送手段20との間に配置され、用紙Pに対向するプラテン41の方向に押圧力がかかっている。これにより、用紙Pは、プラテン41に押し付けられ、記録ヘッド31に対して安定した位置で搬送されている。しかしながら、このとき用紙Pにかかるプラテン41からの反力は、LFローラ11とEJローラ21とにかかるが、EJローラ21のシャフト21aの直径が細いため、EJローラ21に撓みが発生してしまう。つまり、第2の搬送動作では、EJローラ21が撓んだ状態で用紙搬送が行われていることになる。
【0026】
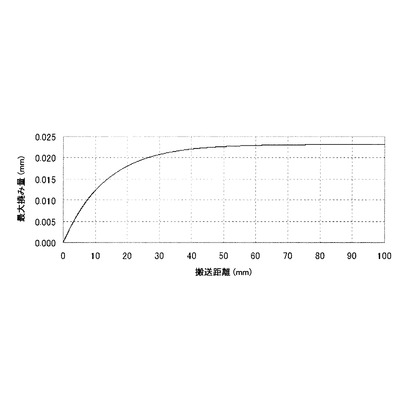
図5は、上述したEJローラ21の撓み量を実測した結果を示すグラフである。横軸は第2の搬送動作が開始されてからの用紙Pの搬送距離であり、縦軸はEJローラ21の軸方向中央付近での最大撓み量である。図5からわかるように、EJローラ21の撓みは、第2の搬送動作開始から徐々に増大し、用紙Pが約60mm搬送された時点でほぼ最大となり、それが第3の搬送動作に切り替わるまで維持される。
【0027】
このようなEJローラ21の撓みは、以下に示すように、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる際に、記録ヘッド31に対する搬送ずれを発生させる。
【0028】
第2の搬送動作中、用紙Pの後端がペーパーエッジセンサ42により検知されると、搬送制御部30により、搬送モータ51の回転が停止され、したがって用紙搬送が一時停止する。このときの用紙Pの後端位置は、ペーパーエッジセンサ42と、LFローラ11とピンチローラ12とのニップ部との間である。そして、記録動作が行われた後、搬送モータ51の回転が開始され、最後の第2の搬送動作が行われるが、その搬送動作は、用紙Pの後端がLFローラ11とピンチローラ12とのニップ部に停止しないよう行われる。その後、用紙Pの後端がLFローラ11とピンチローラ12とのニップ部を通過した時点で、用紙搬送動作は第3の搬送動作に切り替わる。このとき、上述した用紙Pにかかるプラテン41からの反力がなくなるため、LFローラ11とEJローラ21とにかかっていた反力も解放され、EJローラ21の撓みも元に戻る。用紙Pは、EJローラ21と拍車22とに挟持されているため、EJローラ21の撓み戻りにより、その位置が移動してしまい、これが、記録ヘッド31に対する搬送ずれとなり、記録画像にスジを発生させることになる。
【0029】
このような搬送ずれに対して、本実施形態の記録装置1は、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる直前に、搬送モータ51が逆回転して用紙を搬送方向と反対方向に搬送するように制御されている。これにより、EJローラ21の撓みを取り除き、上述の搬送ずれの発生を抑制することができる。以下、そのメカニズムについて説明する。
【0030】
搬送モータ51が逆回転すると、上述した伝達機構によりLFローラ11も逆回転し、したがって、用紙Pも第1の搬送手段10により逆搬送される。このとき、EJローラ21にも同様に、搬送モータ51の逆回転力が伝達される。しかしながら、上述した第1の搬送手段10の用紙搬送速度V1と第2の搬送手段20の用紙搬送速度V2との関係(V1>V2)により、EJローラ21には、用紙搬送方向と反対方向に0.01N・m以上のトルクが作用する。その結果、搬送モータ51の逆回転力はトルクリミッター55aにより遮断され、第2の搬送手段20は、用紙Pを介し、第1の搬送手段10に対して従動回転(従動駆動)するようになる。このため、上述した用紙Pにかかる反力はなくなり、LFローラ11とEJローラ21とにかかっていた反力も解放され、EJローラ21の撓みも元に戻る。その直後、EJローラ21の撓みがない状態で、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる。そのため、上述した用紙Pの搬送ずれが発生することはなく、すなわち記録画像にスジが発生することもなくなる。
【0031】
ここで、搬送モータ51の逆回転量の設定値の一例について説明する。
【0032】
搬送モータ51の逆回転量は、第1の搬送手段10による用紙Pの逆搬送距離がEJローラ21の最大撓み量以上となるように設定される。EJローラ21の最大撓み量として、事前に実験によって計測した値を用いると、図4から、EJローラ21の最大撓み量は0.023mmであり、したがって、用紙Pの逆搬送距離は0.1mmと設定される。このとき、LFローラ11の逆回転量は、LFローラ11の用紙搬送部の直径が9.714mmであることから、360°/(9.714πmm/0.1mm)=1.2°に設定される。したがって、搬送モータ51の逆回転は、エンコーダホイール62aとエンコーダセンサ61aとによりLFローラ11が1.2°だけ逆回転したことが検知されたときに停止するように、搬送制御部30により制御される。
【0033】
また、搬送モータ51の逆回転は、逆回転終了時の用紙Pの後端と、LFローラ11とピンチローラ12とのニップ部との距離が、最大撓み発生距離に対して十分短い距離となるように、搬送制御部30により、その開始のタイミングが制御される。ここで、最大撓み発生距離とは、定常の第2の搬送動作によって発生するEJローラ21の撓みが最大になるまでの用紙Pの搬送距離を意味する。最大撓み発生距離としては、EJローラ21の最大撓み量と同様に、事前に実験によって計測した値を用いる。そのため、用紙Pの後端がペーパーエッジセンサ42に検知され用紙搬送が停止された後の、用紙Pの後端位置は、LFローラ11とピンチローラ12とのニップ部から用紙搬送方向の上流側2mmに設定される。すなわち、搬送モータ51の逆回転が終了した後の用紙Pの後端位置は、LFローラ11とピンチローラ12とのニップ部から用紙搬送方向の上流側2.1mmとなる。この距離は、最大撓み発生距離である約60mm(図4参照)に対して十分短いため、搬送モータ51の逆回転後の第2の搬送動作に発生するEJローラ21の撓み量は、ほぼ0mmとなる。
【0034】
以上のように、本実施形態では、用紙の後端が第1の搬送手段を通過する前に、一旦、搬送モータを逆回転させることで、用紙にかかる反力を解放し、第2の搬送動作によって発生するEJローラの撓みを取り除いている。したがって、搬送動作ごとにEJローラの撓み量が変動したとしても、それ自体を取り除くことで、搬送ずれを抑制することができ、安定して高精度な用紙搬送を実現することができる。
【符号の説明】
【0035】
1 記録装置
10 第1の搬送手段
20 第2の搬送手段
51 搬送モータ
55b トルクリミッター
【技術分野】
【0001】
本発明は記録装置に関し、特に、記録媒体が2つの搬送手段によって搬送される記録装置に関する。
【背景技術】
【0002】
インクジェットプリンタ(記録装置)では、インクを吐出して画像を記録する記録ヘッドを走査方向に走査させる動作と、その走査方向と交差する搬送方向に記録媒体(以下、「用紙」とする)を搬送する搬送動作とが繰り返されて、用紙への画像記録が行われる。
【0003】
用紙を搬送する搬送動作は、記録ヘッドよりも搬送方向の上流側に配置された第1の搬送手段と、記録ヘッドよりも搬送方向の下流側に配置された第2の搬送手段とによって行われている。第1の搬送手段では、メインの搬送ローラとして、金属シャフトに例えばセラミックをコーティングした高精度ローラが用いられ、その軸上に設けられた位置検知手段(コードホイールとエンコーダセンサ)によりDCモータが制御されている。これにより、インクジェットプリンタでは、高精度な用紙搬送が可能となり、記録画像の高画質化が実現されている。しかしながら、用紙の搬送精度を搬送ローラの加工精度に頼るのは限界にきており、その対策としてローラの偏心補正などが実施されている。
【0004】
また、第2の搬送手段では、インクが吐出された後の用紙を搬送するため、先端の尖った星形の拍車と呼ばれる従動コロが用いられ、その搬送ローラとして、拍車の先端にダメージを与えない弾性体であるゴムローラが用いられている。したがって、第2の搬送手段において偏心補正を行っても、第1の搬送手段ほどの搬送精度が得られないのが現状である。
【0005】
一方、用紙の搬送精度に関して、用紙搬送が前述した2つの搬送手段で行われる場合には、特に考慮すべき事項がある。この用紙搬送動作は、第1の搬送手段のみによって搬送される第1の搬送動作と、第1の搬送手段と第2の搬送手段とによって搬送される第2の搬送動作と、第2の搬送手段のみによって搬送される第3の搬送動作とに分けることができる。このうち、用紙搬送動作が第2の搬送動作から第3の搬送動作へ切り替わる時に、種々の要因により、第1および第2の搬送動作の場合よりも、用紙の搬送精度が落ちることが一般的に知られている。その要因としては、搬送ローラの精度ずれだけでなく、搬送ローラシャフトの撓みや、用紙が第1の搬送手段の搬送ローラを抜ける(通過する)際の挙動の不安定さなどが挙げられる。
【0006】
これら用紙の搬送精度を低下させる要因のうち、搬送ローラシャフトの撓みによるものについて説明する。第2の搬送動作では、搬送性を安定させるために、第1の搬送手段の用紙搬送速度V1と第2の搬送手段の用紙搬送速度V2とは、V1>V2の関係を満たしている。これにより、用紙は、第1の搬送手段と第2の搬送手段との間に配置されたプラテンに押し付けられ、記録ヘッドに対して安定した位置で搬送される。しかしながら、このとき用紙にかかるプラテンからの反力は、第1および第2の搬送手段のそれぞれの搬送ローラにもかかり、この反力により、搬送ローラに撓みが発生する。そして、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる、すなわち、用紙の後端が第1の搬送手段の搬送ローラを通過すると、用紙にかかる反力は解放される。それにより、第2の搬送手段の搬送ローラの撓みは元に戻り、その分だけ搬送量に誤差が生じることになる。
【0007】
このような搬送動作の切り替わり時に発生する用紙の搬送精度の低下を軽減するために、いくつかの提案がなされている。例えば、特許文献1では、第2の搬送動作から第3の搬送動作への切り替わり時の搬送量を補正する補正値をテストパターンの実測により求め、この補正値により搬送量を補正する技術が提案されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−7817号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1に記載の方法では、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる時の搬送量の補正値は固定値であり、すなわち、常に固定の補正値を用いた搬送量の補正制御が実施されている。そのため、搬送動作ごとに搬送量の誤差が変動する場合、その誤差を正確に補正することは困難である。特に搬送ローラの撓み量は、搬送ローラの偏心による用紙搬送速度や摩擦係数の変動など、種々の要因の変動により搬送動作ごとに変動するため、結果として搬送動作切り替わり時の搬送量の誤差を変動させることになる。
【0010】
そこで本発明は、記録媒体を搬送する搬送ローラの撓みを低減または除去することで、記録媒体の搬送精度の低下を抑制して、高精度な用紙搬送を実現する記録装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上述した課題を解決するために、本発明の記録装置は、インクを吐出して記録媒体に画像を記録する記録ヘッドの走査方向と交差する搬送方向に記録媒体を搬送する用紙搬送機構と、用紙搬送機構の制御を行う搬送制御部とを有している。用紙搬送機構は、記録ヘッドよりも搬送方向の上流側に配置された第1の搬送手段と、記録ヘッドよりも搬送方向の下流側に配置された第2の搬送手段と、第1の搬送手段を駆動する駆動手段と、第1の搬送手段から第2の搬送手段へ駆動手段の駆動力を伝達する駆動経路上に設けられ、記録媒体を搬送方向と反対方向に搬送させる、予め設定された値以上の駆動力の伝達を遮断する駆動力遮断手段と、を有している。第1および第2の搬送手段は、第1の搬送手段による記録媒体の搬送速度が、第2の搬送手段による記録媒体の搬送速度よりも速くなるようにされ、搬送制御部は、記録媒体が第1の搬送手段と第2の搬送手段とによって搬送方向に搬送されているときに、記録媒体の搬送方向上流側の端部が第1の搬送手段を通過する前に、一旦、記録媒体を第1の搬送手段によって反対方向に搬送させ、駆動力遮断手段に予め設定された値以上の駆動力を作用させるようになっている。
【発明の効果】
【0012】
以上、本発明によれば、記録媒体を搬送する搬送ローラの撓みを低減または除去することで、記録媒体の搬送精度の低下を抑制して、高精度な用紙搬送を実現する記録装置を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る記録装置の用紙搬送機構を示す斜視図である。
【図2】図1の記録装置の用紙搬送機構を部分的に示す斜視図である。
【図3】本実施形態の制御部とその周辺部の構成を示すブロック図である。
【図4】図1の記録装置の用紙搬送機構を示す断面図である。
【図5】本実施形態のEJローラの撓み量を実測した結果を示すグラフである。
【発明を実施するための形態】
【0014】
以下、図面を参照して、本発明の実施の形態について説明する。
【0015】
まず、図1および図2を参照して、本発明の一実施形態に係る記録装置における記録媒体(以下、「用紙」とする)の搬送機構について説明する。図1は、本実施形態の記録装置の用紙搬送機構を示す斜視図であり、図2は、図1の用紙搬送機構を部分的に示す斜視図である。
【0016】
本実施形態の記録装置1は、インクを吐出して記録媒体(以下、「用紙」とする)に画像を記録する記録ヘッド31の走査方向と交差する方向に用紙を搬送する用紙搬送機構を有している。用紙搬送機構は、記録ヘッド31よりも用紙搬送方向の上流側に配置された第1の搬送手段10と、記録ヘッド31よりも用紙搬送方向の下流側に配置された第2の搬送手段20とを有している。用紙は、給紙機構(図示せず)により矢印A(図1参照)の方向に給紙され、用紙搬送機構10,20により搬送されて、矢印Bの方向(図1参照)へ排紙される。以下、用紙搬送機構の第1および第2の搬送手段10,20を個別に説明する。
【0017】
第1の搬送手段10は、レフトプレート72とライトプレート73とに保持されたLF(Line Feed)ローラ11と、バネ(図示せず)によってLEローラ11に押圧されたピンチローラ12と、を有している。ピンチローラ12は、シャーシ71に取り付けられたピンチローラホルダ13に保持され、図示した実施形態では、4個のピンチローラホルダ13に対して、8個のピンチローラ12が設けられている。また、LFローラ11の同軸上には、図2に示すように、LFローラ11に直結されたエンコーダホイール62aが設けられ、エンコーダセンサ61aによりLFローラ11の回転状態が読み取られるようになっている。本実施形態では、LFローラ11の用紙搬送部として、例えば膜厚約0.062mmのセラミックコーティングが施され、その直径は9.714±0.005mmである。また、ピンチローラ12の総圧は、例えば約25080mN(2560gf)である。LFローラ11の回転力は、DCモータからなる搬送モータ51の駆動力がタイミングベルト52を介してLFローラ11の軸上に設けられたLFプーリギア53に伝達されることによって得られている。
【0018】
第2の搬送手段20は、レフトプレート72とライトプレート73とに保持されたEJ(Eject)ローラ21と、EJローラ21に押圧された拍車22とを有している。拍車22は、スパーベース(図示せず)に保持された拍車バネ23に取り付けられ、図示した実施形態では、10個の拍車バネ23に対して、10個の拍車22が設けられている。拍車22は、星形の軸方向断面を有し、EJローラ21の用紙搬送部としては、拍車22の先端にダメージを与えない弾性体であるゴムローラ21bが用いられている。また、EJローラ21の同軸上には、図2に示すように、EJローラ21に直結されたエンコーダホイール62bが設けられ、エンコーダセンサ61bによりEJローラ21の回転状態が読み取られるようになっている。本実施形態では、EJローラ21は、例えば、ゴムローラ21bの直径が9.693±0.015mmであり、シャフト21aの直径が7±0.1mmである。また、ピンチローラ12の総圧は、例えば約4900mN(500gf)である。EJローラ21の回転力は、プーリ部とギア部とからなるLFプーリギア53のギア部からの駆動力がアイドラギア54を介してEJローラ21の軸上に設けられたEJ駆動ギア55に伝達されることによって得られている。また、EJ駆動ギア55には、トルクリミッター(駆動力遮断手段)55aが一体化され、EJローラ21に対して用紙搬送方向と反対方向に予め設定された値以上、例えば0.01N・m以上の負荷がかかるとその負荷を遮断するようになっている。なお、トルクリミッター55aは、本実施形態では、EJ駆動ギア55に一体化して配置されているが、EJローラ21の駆動経路上であれば、どこに配置されていてもよい。
【0019】
さらに、本実施形態の記録装置1は、搬送モータ51の駆動を制御して、用紙搬送機構10,20の用紙搬送動作を制御する搬送制御部30を有している。図3には、搬送制御部30とその周辺部のブロック図が示されている。
【0020】
次に、図1から図4を参照して、本実施形態の記録装置における用紙搬送動作および記録動作について説明する。図4は、本実施形態の記録装置の用紙搬送機構を示す断面図であり、図4(a)から図4(c)はそれぞれ、上述した第1から第3の搬送動作に対応する図である。
【0021】
まず、給紙機構により給紙された用紙Pは、搬送モータ51によって回転するLFローラ11と、ピンチローラ12とからなるローラ対で挟持され、搬送される。つまり、このとき用紙Pは、第1の搬送手段10(LFローラ11およびピンチローラ12)のみで搬送されており、この搬送動作が第1の搬送動作である(図4(a)参照)。
【0022】
用紙搬送が進んでいくと、用紙Pの前端(搬送方向下流側端部)は、搬送モータ51によって回転するEJローラ21と、拍車22とからなるローラ対で挟持される。したがって、用紙Pは、第1の搬送手段10(LFローラ11およびピンチローラ12)と第2の搬送手段20(EJローラ21および拍車22)とによって搬送されるようになる。この搬送動作が第2の搬送動作である(図4(b)参照)。
【0023】
さらに用紙搬送が進むと、用紙Pの後端(搬送方向上流側端部)は第1の搬送手段10(LFローラ11およびピンチローラ12)を通過する。そして、用紙Pは、第2の搬送手段20(EJローラ21および拍車22)のみで搬送されるようになる。この搬送動作が第3の搬送動作であり(図4(c)参照)、用紙Pの後端が第2の搬送手段20(EJローラ21および拍車22)を通過すると、第3の搬送動作は終了し、つまり用紙搬送動作は終了する。
【0024】
記録動作は次のように行われる。まず、第1の搬送動作中、第1の搬送手段10の搬送方向上流に設けられたペーパーエッジセンサ(記録媒体検知手段)42により、用紙Pの位置が検知される。そして、用紙Pが記録ヘッド31に対向するプラテン41上の所定の位置に到達したことが検知されると、搬送制御部30により、搬送モータ51の回転が停止され、したがって搬送動作が一時停止する。用紙Pが位置決めされると、記録ヘッド31は、用紙Pにインクを吐出しながら、用紙搬送方向と交差する方向に往復移動し、1往復分の画像を形成する。この1往復分の画像記録が終了すると、上述した搬送動作が再び開始され、その後、この搬送動作と記録動作とが繰り返されて、用紙Pに情報が順次記録されていく。
【0025】
本実施形態は、搬送モータ51とLFローラ11との回転比が4.5:1となり、LFローラ11とEJローラ21との回転比が1:1となるように構成されている。また、上述したように、LFローラ11の用紙搬送部の直径は9.714±0.005mmであり、EJローラ21の用紙搬送部であるゴムローラ21bの直径は9.693±0.015mmである。したがって、第1の搬送手段10の用紙搬送速度V1と第2の搬送手段20の用紙搬送速度V2とは、常にV1>V2の関係を満たしている。そのため、第2の搬送動作では、用紙Pの内側の方向に、つまり第1の搬送手段10と第2の搬送手段20との間に配置され、用紙Pに対向するプラテン41の方向に押圧力がかかっている。これにより、用紙Pは、プラテン41に押し付けられ、記録ヘッド31に対して安定した位置で搬送されている。しかしながら、このとき用紙Pにかかるプラテン41からの反力は、LFローラ11とEJローラ21とにかかるが、EJローラ21のシャフト21aの直径が細いため、EJローラ21に撓みが発生してしまう。つまり、第2の搬送動作では、EJローラ21が撓んだ状態で用紙搬送が行われていることになる。
【0026】
図5は、上述したEJローラ21の撓み量を実測した結果を示すグラフである。横軸は第2の搬送動作が開始されてからの用紙Pの搬送距離であり、縦軸はEJローラ21の軸方向中央付近での最大撓み量である。図5からわかるように、EJローラ21の撓みは、第2の搬送動作開始から徐々に増大し、用紙Pが約60mm搬送された時点でほぼ最大となり、それが第3の搬送動作に切り替わるまで維持される。
【0027】
このようなEJローラ21の撓みは、以下に示すように、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる際に、記録ヘッド31に対する搬送ずれを発生させる。
【0028】
第2の搬送動作中、用紙Pの後端がペーパーエッジセンサ42により検知されると、搬送制御部30により、搬送モータ51の回転が停止され、したがって用紙搬送が一時停止する。このときの用紙Pの後端位置は、ペーパーエッジセンサ42と、LFローラ11とピンチローラ12とのニップ部との間である。そして、記録動作が行われた後、搬送モータ51の回転が開始され、最後の第2の搬送動作が行われるが、その搬送動作は、用紙Pの後端がLFローラ11とピンチローラ12とのニップ部に停止しないよう行われる。その後、用紙Pの後端がLFローラ11とピンチローラ12とのニップ部を通過した時点で、用紙搬送動作は第3の搬送動作に切り替わる。このとき、上述した用紙Pにかかるプラテン41からの反力がなくなるため、LFローラ11とEJローラ21とにかかっていた反力も解放され、EJローラ21の撓みも元に戻る。用紙Pは、EJローラ21と拍車22とに挟持されているため、EJローラ21の撓み戻りにより、その位置が移動してしまい、これが、記録ヘッド31に対する搬送ずれとなり、記録画像にスジを発生させることになる。
【0029】
このような搬送ずれに対して、本実施形態の記録装置1は、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる直前に、搬送モータ51が逆回転して用紙を搬送方向と反対方向に搬送するように制御されている。これにより、EJローラ21の撓みを取り除き、上述の搬送ずれの発生を抑制することができる。以下、そのメカニズムについて説明する。
【0030】
搬送モータ51が逆回転すると、上述した伝達機構によりLFローラ11も逆回転し、したがって、用紙Pも第1の搬送手段10により逆搬送される。このとき、EJローラ21にも同様に、搬送モータ51の逆回転力が伝達される。しかしながら、上述した第1の搬送手段10の用紙搬送速度V1と第2の搬送手段20の用紙搬送速度V2との関係(V1>V2)により、EJローラ21には、用紙搬送方向と反対方向に0.01N・m以上のトルクが作用する。その結果、搬送モータ51の逆回転力はトルクリミッター55aにより遮断され、第2の搬送手段20は、用紙Pを介し、第1の搬送手段10に対して従動回転(従動駆動)するようになる。このため、上述した用紙Pにかかる反力はなくなり、LFローラ11とEJローラ21とにかかっていた反力も解放され、EJローラ21の撓みも元に戻る。その直後、EJローラ21の撓みがない状態で、用紙搬送動作が第2の搬送動作から第3の搬送動作に切り替わる。そのため、上述した用紙Pの搬送ずれが発生することはなく、すなわち記録画像にスジが発生することもなくなる。
【0031】
ここで、搬送モータ51の逆回転量の設定値の一例について説明する。
【0032】
搬送モータ51の逆回転量は、第1の搬送手段10による用紙Pの逆搬送距離がEJローラ21の最大撓み量以上となるように設定される。EJローラ21の最大撓み量として、事前に実験によって計測した値を用いると、図4から、EJローラ21の最大撓み量は0.023mmであり、したがって、用紙Pの逆搬送距離は0.1mmと設定される。このとき、LFローラ11の逆回転量は、LFローラ11の用紙搬送部の直径が9.714mmであることから、360°/(9.714πmm/0.1mm)=1.2°に設定される。したがって、搬送モータ51の逆回転は、エンコーダホイール62aとエンコーダセンサ61aとによりLFローラ11が1.2°だけ逆回転したことが検知されたときに停止するように、搬送制御部30により制御される。
【0033】
また、搬送モータ51の逆回転は、逆回転終了時の用紙Pの後端と、LFローラ11とピンチローラ12とのニップ部との距離が、最大撓み発生距離に対して十分短い距離となるように、搬送制御部30により、その開始のタイミングが制御される。ここで、最大撓み発生距離とは、定常の第2の搬送動作によって発生するEJローラ21の撓みが最大になるまでの用紙Pの搬送距離を意味する。最大撓み発生距離としては、EJローラ21の最大撓み量と同様に、事前に実験によって計測した値を用いる。そのため、用紙Pの後端がペーパーエッジセンサ42に検知され用紙搬送が停止された後の、用紙Pの後端位置は、LFローラ11とピンチローラ12とのニップ部から用紙搬送方向の上流側2mmに設定される。すなわち、搬送モータ51の逆回転が終了した後の用紙Pの後端位置は、LFローラ11とピンチローラ12とのニップ部から用紙搬送方向の上流側2.1mmとなる。この距離は、最大撓み発生距離である約60mm(図4参照)に対して十分短いため、搬送モータ51の逆回転後の第2の搬送動作に発生するEJローラ21の撓み量は、ほぼ0mmとなる。
【0034】
以上のように、本実施形態では、用紙の後端が第1の搬送手段を通過する前に、一旦、搬送モータを逆回転させることで、用紙にかかる反力を解放し、第2の搬送動作によって発生するEJローラの撓みを取り除いている。したがって、搬送動作ごとにEJローラの撓み量が変動したとしても、それ自体を取り除くことで、搬送ずれを抑制することができ、安定して高精度な用紙搬送を実現することができる。
【符号の説明】
【0035】
1 記録装置
10 第1の搬送手段
20 第2の搬送手段
51 搬送モータ
55b トルクリミッター
【特許請求の範囲】
【請求項1】
インクを吐出して記録媒体に画像を記録する記録ヘッドの走査方向と交差する搬送方向に前記記録媒体を搬送する用紙搬送機構と、該用紙搬送機構の制御を行う搬送制御部とを有する記録装置であって、
前記用紙搬送機構が、
前記記録ヘッドよりも前記搬送方向の上流側に配置された第1の搬送手段と、
前記記録ヘッドよりも前記搬送方向の下流側に配置された第2の搬送手段と、
前記第1の搬送手段を駆動する駆動手段と、
前記第1の搬送手段から前記第2の搬送手段へ前記駆動手段の駆動力を伝達する駆動経路上に設けられ、前記記録媒体を前記搬送方向と反対方向に搬送させる、予め設定された値以上の駆動力の伝達を遮断する駆動力遮断手段と、
を有し、
前記第1および第2の搬送手段は、前記第1の搬送手段による前記記録媒体の搬送速度が、前記第2の搬送手段による前記記録媒体の搬送速度よりも速くなるようにされ、
前記搬送制御部は、前記記録媒体が前記第1の搬送手段と前記第2の搬送手段とによって前記搬送方向に搬送されているときに、前記記録媒体の前記搬送方向上流側の端部が前記第1の搬送手段を通過する前に、一旦、前記記録媒体を前記第1の搬送手段によって前記反対方向に搬送させ、前記駆動力遮断手段に前記予め設定された値以上の駆動力を作用させるようになっている、記録装置。
【請求項2】
前記搬送制御部は、前記第1の搬送手段が前記記録媒体を介して前記第2の搬送手段を従動駆動するまで、前記記録媒体を前記第1の搬送手段によって前記反対方向に搬送させるようになっている、請求項1に記載の記録装置。
【請求項3】
前記第1の搬送手段よりも前記搬送方向の上流側に配置され、前記記録媒体の位置を検知する記録媒体検知手段を有し、
前記搬送制御部は、前記記録媒体検知手段が前記記録媒体の前記搬送方向上流側の端部の位置を検知した後で、前記記録媒体を前記反対方向に搬送させるようになっている、請求項1または2に記載の記録装置。
【請求項1】
インクを吐出して記録媒体に画像を記録する記録ヘッドの走査方向と交差する搬送方向に前記記録媒体を搬送する用紙搬送機構と、該用紙搬送機構の制御を行う搬送制御部とを有する記録装置であって、
前記用紙搬送機構が、
前記記録ヘッドよりも前記搬送方向の上流側に配置された第1の搬送手段と、
前記記録ヘッドよりも前記搬送方向の下流側に配置された第2の搬送手段と、
前記第1の搬送手段を駆動する駆動手段と、
前記第1の搬送手段から前記第2の搬送手段へ前記駆動手段の駆動力を伝達する駆動経路上に設けられ、前記記録媒体を前記搬送方向と反対方向に搬送させる、予め設定された値以上の駆動力の伝達を遮断する駆動力遮断手段と、
を有し、
前記第1および第2の搬送手段は、前記第1の搬送手段による前記記録媒体の搬送速度が、前記第2の搬送手段による前記記録媒体の搬送速度よりも速くなるようにされ、
前記搬送制御部は、前記記録媒体が前記第1の搬送手段と前記第2の搬送手段とによって前記搬送方向に搬送されているときに、前記記録媒体の前記搬送方向上流側の端部が前記第1の搬送手段を通過する前に、一旦、前記記録媒体を前記第1の搬送手段によって前記反対方向に搬送させ、前記駆動力遮断手段に前記予め設定された値以上の駆動力を作用させるようになっている、記録装置。
【請求項2】
前記搬送制御部は、前記第1の搬送手段が前記記録媒体を介して前記第2の搬送手段を従動駆動するまで、前記記録媒体を前記第1の搬送手段によって前記反対方向に搬送させるようになっている、請求項1に記載の記録装置。
【請求項3】
前記第1の搬送手段よりも前記搬送方向の上流側に配置され、前記記録媒体の位置を検知する記録媒体検知手段を有し、
前記搬送制御部は、前記記録媒体検知手段が前記記録媒体の前記搬送方向上流側の端部の位置を検知した後で、前記記録媒体を前記反対方向に搬送させるようになっている、請求項1または2に記載の記録装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−111808(P2013−111808A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258655(P2011−258655)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]