
記録装置
【課題】安定的にキャップを記録ヘッドの吐出口面から離間させることができる記録装置を提供する。
【解決手段】本発明の記録装置には、記録ヘッドを保持し走査するキャリッジと、記録ヘッドの吐出口面に当接できるキャップ21と、キャップ21を吐出口面に対し当接する方向へ変位させるカム32とが設けられている。さらに、カム32を駆動するカム駆動手段35と、キャップ21を吐出口面に対し離間する方向へ付勢する付勢手段34とが設けられており、カム駆動手段35を駆動することによりキャップ21を吐出口面から離間させる。本発明の記録装置には、キャリッジの走査方向における位置を検出するための検出手段と、検出手段により検出されたキャリッジの位置に基づいて、キャップ21が吐出口面から離間したか判定する判定手段とがさらに設けられている。
【解決手段】本発明の記録装置には、記録ヘッドを保持し走査するキャリッジと、記録ヘッドの吐出口面に当接できるキャップ21と、キャップ21を吐出口面に対し当接する方向へ変位させるカム32とが設けられている。さらに、カム32を駆動するカム駆動手段35と、キャップ21を吐出口面に対し離間する方向へ付勢する付勢手段34とが設けられており、カム駆動手段35を駆動することによりキャップ21を吐出口面から離間させる。本発明の記録装置には、キャリッジの走査方向における位置を検出するための検出手段と、検出手段により検出されたキャリッジの位置に基づいて、キャップ21が吐出口面から離間したか判定する判定手段とがさらに設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、記録装置、特に記録ヘッドの吐出口面からキャップを素早く安定して離間させることができる記録装置に関する。
【背景技術】
【0002】
記録装置の1つとしてインクジェット記録装置がある。インクジェット記録装置では、電源オフ状態や記録待機状態において、インク吐出口が並んだ記録ヘッドの吐出口面(フェイス面)にキャップを当接させることで吐出口を密閉し、記録ヘッド内部のインクの乾燥や記録ヘッド内部からのインクの蒸発を抑止している。
【0003】
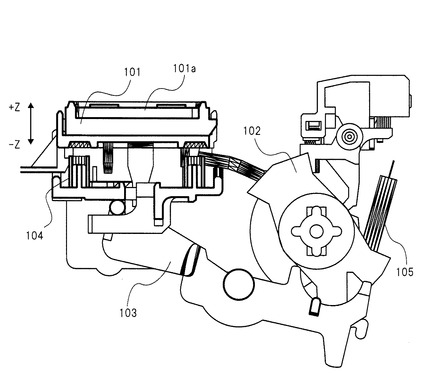
図6に、従来技術の記録装置におけるキャップおよびキャップの動作に関連する箇所の概略構成図を示す。
【0004】
キャップ101はメインカム102の回転により従動するキャップレバー103によって、不図示の記録ヘッドのフェイス面と当接する方向へと移動(+Z方向)し、記録ヘッドのフェイス面と当接する。その際、キャップ101がキャップレバー103によって所定の位置まで上昇した後、キャップ101の、記録ヘッドのフェイス面との当接面101aの反対側に設けた圧縮ばね104により、キャップ101をフェイス面に対し一定の接触圧で付勢する。この圧縮ばね104の付勢力によって、安定した密着性を維持することが可能である。一方、キャップ101をフェイス面から離間させる際には、キャップレバー103に備えられた引張りばね105により、キャップレバー103を介してキャップ101をフェイス面から引き離す方向(−Z方向)へ付勢する。そして、キャップ101をフェイス面から離間した状態にする。
【0005】
通常、フェイス面やキャップの当接面101aにはワイピング動作やクリーニング動作により生じた液体状のインクが付着している。キャップ101とフェイス面との当接状態が長期間に及ぶとインクの乾燥や固着が生じ、キャップ101がフェイス面に対し貼り付き、上記の手段ではキャップ101をフェイス面から離間させることが困難となる。
【0006】
この状態で、記録ヘッドを搭載したキャリッジを走査させると、キャリッジを駆動するキャリッジモータあるいは駆動列に対し過負荷が生じたり、キャップ101が損傷したりする可能性がある。
【0007】
特に近年、高画質化や高速化を目的として記録ヘッドの長尺化や多列化が進んでいる。これに伴いキャップ101は大型化し、フェイス面との接触面が増加して、フェイス面に貼り付き易い状況となっている。
【0008】
これに関して特許文献1には、キャップのフェイス面への貼り付きが生じた際に、キャリッジモータおよび駆動列に過負荷を生じさせることなくキャップを離間させる方法が示されている。これによれば、キャリッジに過負荷が生じない範囲でキャリッジを所定回数微小往復動作させることにより、キャップとフェイス面との間に少しずつ気泡を混入させ、キャップをフェイス面から離間させるというものである。さらに、キャップの移動量を検知できるセンサを設ける事で、キャップがフェイス面に対し当接ないしは離間状態であるかを判定する。このセンサにより、キャップがフェイス面に対し当接状態にあると判断したときはキャリッジの微小往復動作を行い、離間状態となったと判断したときにはすぐに動作を停止させる方法が示されている。これにより、短時間で安定的にキャップのフェイス面からの離間動作を行うことが可能となっている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−143155号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
キャップとフェイス面との安定した密着性を維持するために、上述のようにキャップ101とフェイス面との当接状態における接触圧を圧縮ばね104で維持する。そして、引張りばね105の付勢力によりキャップレバー103を介してキャップ101をフェイス面から離間させる構成が望ましい。しかしながら、この構成において、キャップ101がフェイス面と離間状態にあることを検知するには、キャップ101の移動量を直接検知できるセンサを新たに設ける必要があり、コストアップを招く要因となる。さらにキャップ101付近は、記録ヘッドからの吐出動作により生じたインクミストが多く飛散しており、センサに付着する可能性が高いことから誤動作が生じる可能性があり、記録装置の信頼性に支障をきたす可能性がある。
【0011】
本発明の目的は、安定してキャップを記録ヘッドの吐出口面から離間させることができる記録装置を提供することにある。
【課題を解決するための手段】
【0012】
本発明の記録装置には、記録ヘッドを保持し走査するキャリッジと、記録ヘッドの吐出口面に当接できるキャップと、キャップを吐出口面に対し当接する方向へ変位させるカムとが設けられている。さらに、カムを駆動するカム駆動手段と、キャップを吐出口面に対し離間する方向へ付勢する付勢手段とが設けられており、カム駆動手段を駆動することによりキャップを吐出口面から離間させる。
【0013】
本発明の記録装置には、キャリッジの走査方向における位置を検出するための検出手段と、検出手段により検出されたキャリッジの位置に基づいて、キャップが吐出口面から離間したか判定する判定手段とがさらに設けられている。
【発明の効果】
【0014】
本発明によれば、センサを追加することなくキャップと記録ヘッドのフェイス面の当接および離間状態を判定でき、安定的にキャップを記録ヘッドの吐出口面から離間させることができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る記録装置の一実施形態の構成図である。
【図2】回復機構部の斜視図である。
【図3】図2のAA断面の概略図を示す。
【図4】図2のBB断面の概略図を示す。
【図5】キャップの微小往復動作に関わる動作シーケンスである。
【図6】従来技術の記録装置におけるキャップおよびキャップの動作に関連する箇所の概略構成図である。
【発明を実施するための形態】
【0016】
以下に、添付の図面に基づき、本発明の実施の形態の詳細について説明する。なお、同一の機能を有する構成には添付図面中、同一の番号を付与し、その説明を省略することがある。
【0017】
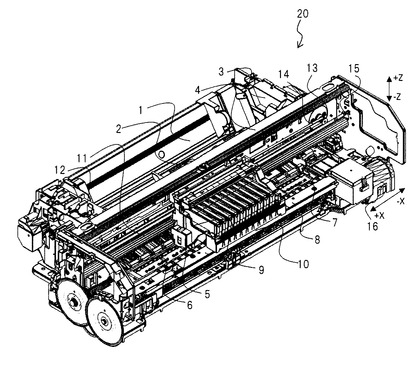
最初に、本実施形態に関わる記録装置の基本構成について説明する。図1に、本発明に係る記録装置の一実施形態の構成図を示す。記録装置20は各機構部の役割から概して、給紙部、用紙搬送部、排紙部、キャリッジ部、回復機構部などに分類することができる。以下、図1を用いて各機構部の説明を行う。
【0018】
[給紙部]
給紙部においては、不図示の記録媒体を積載する圧板1、記録媒体を1枚ずつ給紙する給紙ローラ2、記録媒体を分離する分離ローラ(不図示)等がベース3に取り付けられている。給紙部の記録媒体は用紙搬送部に搬送される。
【0019】
[用紙搬送部]
シャーシ4には、記録媒体を搬送する搬送ローラ5が取り付けられている。搬送ローラ5には、従動する複数のピンチローラ6が当接して設けられている。ピンチローラ6は搬送ローラ5に対し所定圧で当接しており、記録媒体の搬送力を生み出している。
【0020】
給紙部から用紙搬送部に送られた記録媒体は、搬送ローラ5とピンチローラ6とのローラ対に送られ、記録ヘッド9の、インクの吐出口が設けられた吐出口面(フェイス面)と間隔をおいて対向するプラテン7上に搬送される。プラテン7には搬送基準面となるリブが形成されている。リブは記録ヘッド9のフェイス面と記録媒体の記録面との隙間を管理すると同時に、記録媒体の波打ちを抑制する役割を果たしている。記録媒体は、用紙搬送部の位置で記録が行われ、排紙部に搬送される。
【0021】
[排紙部]
排紙部は、排紙ローラ8と、従動する複数の拍車(不図示)などから構成されている。拍車は排紙ローラ8に対して所定圧で当接されており、用紙搬送部から搬送された画像形成された記録媒体は、排紙ローラ8と拍車によって挟持されることで記録装置20の内部から排出される。
【0022】
[キャリッジ部]
キャリッジ部は、記録ヘッド9を搭載するためのキャリッジ10を有しており、そのキャリッジ10は、ガイドシャフト11およびガイドレール12によって支持されている。ガイドシャフト11は、記録媒体の搬送方向に対して直角方向にキャリッジ10を往復走査させるように案内支持している。ガイドレール12は、キャリッジ10の後端を保持して、記録ヘッド9のフェイス面と記録媒体との隙間を維持する役割を果たしている。またキャリッジ10は、シャーシ4に取り付けられたキャリッジモータ(キャリッジ駆動手段)13によりタイミングベルト14を介して駆動される。また、キャリッジ10に設けられたキャリッジセンサ(不図示)により、エンコーダスケール15を読み取ることでキャリッジ10の位置を検出し走査制御を行う。キャリッジセンサとエンコーダスケール15とでキャリッジ10の位置が検出可能な検出手段を構成しているが、検出手段はキャリッジ10の位置を検出できればよいので、この構成に限定されない。
【0023】
上記の用紙搬送部およびキャリッジ部の構成において記録媒体に画像形成する場合、搬送ローラ5およびピンチローラ6からなるローラ対により記録媒体を副走査方向に搬送する。また、記録ヘッド9を搭載したキャリッジ10を副走査方向とは垂直な方向である主走査方向に移動させて、記録ヘッド9を目的の画像形成位置に配置してインクを吐出させる。記録ヘッド9は、電気基板からの信号に従って、記録媒体に対してインクを吐出する。本実施形態の記録装置20は、記録媒体の副操作方向への搬送と、記録ヘッド9の主走査方向の移動およびインク吐出とを交互に繰り返すことにより記録媒体上に画像を形成する構成となっている。
【0024】
[回復機構部]
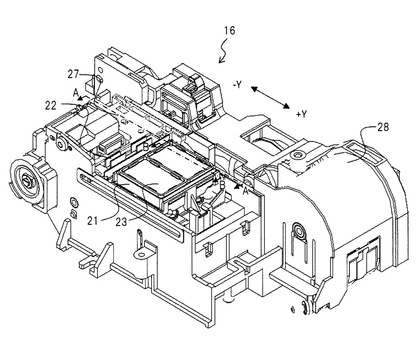
回復機構部16は、記録ヘッド9のインク吐出性能を維持回復するためのものである。図2に回復機構部16の斜視図を示す。
【0025】
回復機構部16は主に、記録ヘッド9のフェイス面に対し当接および離間が可能なキャップ21と、記録ヘッド9の吐出口からインク吸引などを行う吸引ポンプ28と、記録ヘッド9のフェイス面を拭き取り清掃するためのワイパー22の3つから構成される。
【0026】
吸引ポンプ28やワイパー22の駆動には不図示のモータ(カム駆動手段)を用いている。モータの一方向の回転で吸引ポンプ28が作動し、反対方向の回転でワイパー22のワイピング動作およびキャップ21の昇降動作(記録ヘッド9のフェイス面への当接離間動作)が行われる。
【0027】
ゴム等の弾性部材からなるワイパー22は、ワイパーホルダ27に固定されている。ワイパーホルダ27は、図2に示すY方向(記録ヘッド9のインク吐出口の配列方向)に移動可能である。そして、記録ヘッド9がキャリッジ10の移動によりワイパー22の可動範囲に位置する際に、+Y方向にワイパーホルダ27が移動することによって、ワイパー22によるワイピング動作を行う。ワイピング動作が終了すると、キャリッジ10をワイパーホルダ22の可動範囲外に退避させてからワイパーホルダ27を−Y方向へと移動させ、キャリッジ10が移動しても記録ヘッド9のフェイス面とワイパー22とが干渉しないようする。
【0028】
ワイピング動作の際、ワイパー22はワイパークリーナ(不図示)に当接し、ワイパー22に付着したインクを除去する。
【0029】
キャップ1の内側部分には、インク吸収体23が設けられている。このインク吸収体23には、後述する予備吐出動作や吸引動作で生じるインクが吸収されている。キャップ21と記録ヘッド9のフェイス面とが離間した状態で、キャップ21ないしインク吸収体23に残っているインクを吸引ポンプ28で吸引する。
【0030】
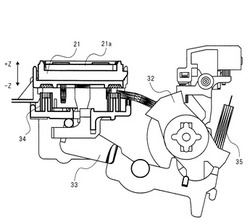
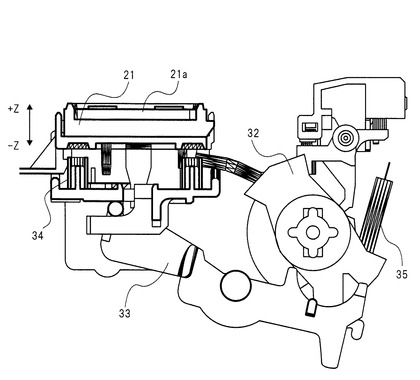
図3に、図2のAA断面の概略図を示す。なお、キャップ21の昇降動作(記録ヘッド9のフェイス面への当接離間動作)に関わる部分のみ図示している。ワイピング動作およびキャップ21の昇降動作などの一連動作は、メインカム32およびこれに従動する複数のカムやアーム等によって所定の動作を行っている。なお、メインカム32の位置はフォトインタラプタ等の位置検出センサ(不図示)によって検出している。
【0031】
モータ(カム駆動手段)の駆動によってメインカム32が回動し、この回動によりキャップ21が取付けられたキャップレバー33が直接動かされることで、キャップ21が記録ヘッド9のフェイス面と当接する方向(+Z方向)へと変位する。一方、記録ヘッド9と離間させる方向(−Z方向)へは、キャップレバー33に設けられた引張りばね(付勢手段)35の付勢力により変位させている。なお、キャップ21は、記録ヘッド9のフェイス面との当接面21aとは反対の面に設けられた圧縮ばね(第2付勢手段)34でキャップ21を記録ヘッド9のフェイス面に対し一定の接触圧で付勢することで、安定した密着性を維持することが可能である。
【0032】
これにより、キャップ21およびその周囲の部品に生じる自重と、キャップ21を記録ヘッド9から離間する際に引張りばね35に生じる張力の方向を概ね一致させることで、引張りばね35の張力が低減でき、部品のクリープ変形が抑制される。
【0033】
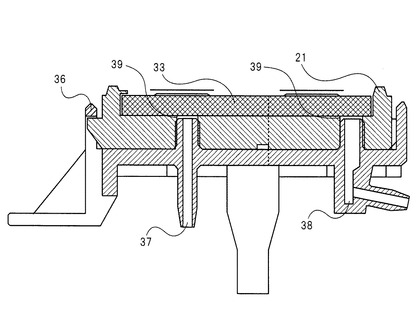
図4に図2のBB断面の概略図を示す。なお、キャップ21付近のみを示している。キャップ21を保持するキャップホルダ(キャップ保持手段)36は、インク排出パイプ37および大気連通パイプ38を備えている。そして、キャップ21には、それぞれのパイプ37、38に対応した貫通穴39が設けられており、キャップ21は、キャップホルダ36のパイプ37、38の外面と密着するようにキャップホルダ36に取り付けられている。これにより、キャップ21とキャップホルダ36と間でシール面が形成されると同時に、摩擦力を発生させることでキャップ21をキャップホルダ36に保持している。
【0034】
吸引ポンプ28は、キャップ21が記録ヘッド9のフェイス面に密着しているときに、インク排出パイプ37を介して吸引することで、吐出口を介して記録ヘッド9内のインク流路に存在する塵埃、固着物、気泡等を吸引除去することができる(吸引動作)。
【0035】
さらに、画像の記録に寄与しないインクを記録ヘッド9からキャップ21に吐出する、いわゆる予備吐出動作によりインク吸収体23インクが吸収され、キャップ21に溜まる。吸引ポンプ28は、キャップ21に溜まったインクをインク排出パイプ37から排出するためにも動作可能である。すなわち、予備吐出されてキャップ21に保持されるインクが所定量に達したときに、吸引ポンプ28を動作させることにより、キャップ21内に保持されていたインクを、インク排出パイプ37を通して不図示のインク吸収部材に移送することができる。
【0036】
吸引ポンプ28の形態としては、例えばチューブポンプ形態のものが用いられる。これは、可撓性を有するチューブと、そのチューブの少なくとも一部を沿わせて保持する曲面が形成された部材と、この部材に向けてチューブを押圧することが可能なローラと、このローラを支持し、回転可能なローラ支持部とを有するものである。すなわち、ローラ支持部を所定方向に回転させることにより、ローラが曲面形成部材上において可撓性チューブを押し潰しながら回動する。これに伴い、キャップ21と記録ヘッド9とで形成される密閉空間に負圧が生じ、インクが記録ヘッド9の吐出口より吸引され、そのインクは、キャップ21からインク排出パイプ37を介してチューブないし吸引ポンプ28に引き込まれる。そこに引き込まれたインクは、さらに下流側に設けられたインク吸収部材に向けて移送される。
【0037】
なお、上述していないが、キャリッジ10の走査を制御する、中央演算装置や記憶部を有する制御部も記録装置20には設けられている。また、制御部は、キャップ21が記録ヘッド9と当接あるいは離間しているかを判断する判断手段の役割もある。
【0038】
以下に、本発明の特徴である、キャップ21を記録ヘッド9のフェイス面から離間させる動作について説明する。本発明のキャップ21を記録ヘッド9のフェイス面から離間させる動作は、以下の3つの場合に特に適している。
【0039】
1)記録装置の電源オフ状態のとき、インクの蒸発を防ぐためにキャップと記録ヘッドのフェイス面とが当接している。この電源オフ状態が長く続き、キャップと記録ヘッドのフェイス面との当接が長く続いた場合。
【0040】
2)出荷した記録装置がユーザ先へ到着した直後であり、ワイピング動作や吸引動作が僅かあるいは全く行われていない場合。
【0041】
3)記録装置の動作が異常終了した後の復帰動作の際などキャップの状態(キャップと記録ヘッドとの当接離間状態)を判断する事が困難な場合。
【0042】
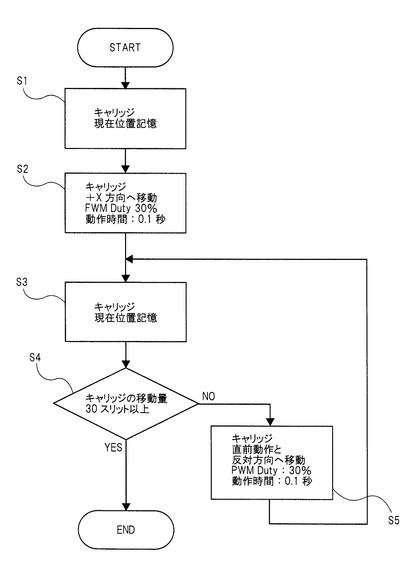
図5に、キャップ21の微小往復動作に関わる動作シーケンスを示す。最初に、キャリッジモータの駆動前におけるキャリッジ10の駆動方向(図1のX方向)における位置を測定して制御部に記憶する(S1)。なお、キャリッジ10の位置は、キャリッジ10の走査制御を行うためにキャリッジ10に設けられているキャリッジセンサを利用して測定すればよい。以降、キャリッジ10の位置を測定する必要がある場合も同様である。
【0043】
次に、キャリッジ10を図2に示す+X方向へと駆動させるようにキャリッジモータを駆動させる(S2)。この時のキャリッジモータのPWM(パルス幅変調)のデューティは30%、動作時間は0.1秒としている。これは、本実施形態においてキャップ21が記録ヘッド9のフェイス面へ貼り付いている場合においても、キャリッジ10に過負荷を生じさせることなく駆動できる設定値であり、実験的に求められたものである。よって、記録装置20の種類などに応じて任意に変更可能である。なお、キャップ21が記録ヘッド9のフェイス面に対して離間した状態においては上記設定値によるキャリッジ10の移動距離は約8ミリである。また、最初のキャリッジ10の移動方向については特に制約は設けない。
【0044】
キャリッジ10の+X方向への駆動が終了したら、その駆動後のキャリッジ10の位置を測定し制御部に記憶する(S3)。ここで、キャップ21が記録ヘッド9のフェイス面から離間したか否かを判定する(S4)。
【0045】
キャップ21と記録ヘッド9のフェイス面とが当接ないしは離間状態であるかを判定する基準として、キャリッジ10の、キャリッジモータの駆動前の位置(第1位置)と駆動後の位置(第2位置)とからキャリッジ10の移動量を制御部で算出する。そして、その移動量と予め設定した閾値との比較を行っている。移動量が閾値以上であった場合は、キャップ21と記録ヘッド9のフェイス面とが離間状態であると判定し、キャリッジ10の微小往復動作を停止させる。一方、移動量が閾値に達しなかった場合は、キャップ21と記録ヘッド9のフェイス面とが当接状態つまりキャップ21が記録ヘッド9のフェイス面に貼り付いていると判定する。なお、本実施形態では閾値を30スリット(150LPI(Line per inch)換算で5.08ミリ)としている。
【0046】
キャップ21と記録ヘッド9のフェイス面とが当接状態にあると制御部で判定した場合はキャリッジ10の微小往復動作を継続する。具体的には、キャリッジモータを再度駆動しキャリッジ10を再度駆動させるが、駆動方向は、前回のキャリッジ10の走査方向と反対(ここでは−X方向)とする。また、この時のキャリッジモータのPWMのデューティは30%、動作時間は0.1秒である。(S5)。キャリッジモータの駆動後、キャリッジ10の位置を測定し制御部に記憶し(S3)、再度キャップ21が記録ヘッド9のフェイス面から離間したか否かを制御部で判定する(S4)。キャップ21と記録ヘッド9のフェイス面とが離間状態にあると判定されるまで、上記の3つのステップ(S5、S3、S4)を繰り返す。
【0047】
以上説明したように、本発明の記録装置20では、キャップ21と記録ヘッド9のフェイス面とが当接状態なのか離間状態なのかを検出するためのセンサを増設せず、キャリッジ10の走査制御のためのセンサを利用している。そのため、コストアップを抑制することができる。また、従来技術のように、インクミストによってセンサが汚れることがないので、安定してキャップ21を記録ヘッド9のフェイス面から離間させることができ、そのため、信頼性の高い記録装置を提供することができる。
【符号の説明】
【0048】
9 記録ヘッド
10 キャリッジ
13 キャリッジモータ(キャリッジ駆動手段)
20 記録装置
21 キャップ
32 メインカム
35 引張りばね(付勢手段)
【技術分野】
【0001】
本発明は、記録装置、特に記録ヘッドの吐出口面からキャップを素早く安定して離間させることができる記録装置に関する。
【背景技術】
【0002】
記録装置の1つとしてインクジェット記録装置がある。インクジェット記録装置では、電源オフ状態や記録待機状態において、インク吐出口が並んだ記録ヘッドの吐出口面(フェイス面)にキャップを当接させることで吐出口を密閉し、記録ヘッド内部のインクの乾燥や記録ヘッド内部からのインクの蒸発を抑止している。
【0003】
図6に、従来技術の記録装置におけるキャップおよびキャップの動作に関連する箇所の概略構成図を示す。
【0004】
キャップ101はメインカム102の回転により従動するキャップレバー103によって、不図示の記録ヘッドのフェイス面と当接する方向へと移動(+Z方向)し、記録ヘッドのフェイス面と当接する。その際、キャップ101がキャップレバー103によって所定の位置まで上昇した後、キャップ101の、記録ヘッドのフェイス面との当接面101aの反対側に設けた圧縮ばね104により、キャップ101をフェイス面に対し一定の接触圧で付勢する。この圧縮ばね104の付勢力によって、安定した密着性を維持することが可能である。一方、キャップ101をフェイス面から離間させる際には、キャップレバー103に備えられた引張りばね105により、キャップレバー103を介してキャップ101をフェイス面から引き離す方向(−Z方向)へ付勢する。そして、キャップ101をフェイス面から離間した状態にする。
【0005】
通常、フェイス面やキャップの当接面101aにはワイピング動作やクリーニング動作により生じた液体状のインクが付着している。キャップ101とフェイス面との当接状態が長期間に及ぶとインクの乾燥や固着が生じ、キャップ101がフェイス面に対し貼り付き、上記の手段ではキャップ101をフェイス面から離間させることが困難となる。
【0006】
この状態で、記録ヘッドを搭載したキャリッジを走査させると、キャリッジを駆動するキャリッジモータあるいは駆動列に対し過負荷が生じたり、キャップ101が損傷したりする可能性がある。
【0007】
特に近年、高画質化や高速化を目的として記録ヘッドの長尺化や多列化が進んでいる。これに伴いキャップ101は大型化し、フェイス面との接触面が増加して、フェイス面に貼り付き易い状況となっている。
【0008】
これに関して特許文献1には、キャップのフェイス面への貼り付きが生じた際に、キャリッジモータおよび駆動列に過負荷を生じさせることなくキャップを離間させる方法が示されている。これによれば、キャリッジに過負荷が生じない範囲でキャリッジを所定回数微小往復動作させることにより、キャップとフェイス面との間に少しずつ気泡を混入させ、キャップをフェイス面から離間させるというものである。さらに、キャップの移動量を検知できるセンサを設ける事で、キャップがフェイス面に対し当接ないしは離間状態であるかを判定する。このセンサにより、キャップがフェイス面に対し当接状態にあると判断したときはキャリッジの微小往復動作を行い、離間状態となったと判断したときにはすぐに動作を停止させる方法が示されている。これにより、短時間で安定的にキャップのフェイス面からの離間動作を行うことが可能となっている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−143155号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
キャップとフェイス面との安定した密着性を維持するために、上述のようにキャップ101とフェイス面との当接状態における接触圧を圧縮ばね104で維持する。そして、引張りばね105の付勢力によりキャップレバー103を介してキャップ101をフェイス面から離間させる構成が望ましい。しかしながら、この構成において、キャップ101がフェイス面と離間状態にあることを検知するには、キャップ101の移動量を直接検知できるセンサを新たに設ける必要があり、コストアップを招く要因となる。さらにキャップ101付近は、記録ヘッドからの吐出動作により生じたインクミストが多く飛散しており、センサに付着する可能性が高いことから誤動作が生じる可能性があり、記録装置の信頼性に支障をきたす可能性がある。
【0011】
本発明の目的は、安定してキャップを記録ヘッドの吐出口面から離間させることができる記録装置を提供することにある。
【課題を解決するための手段】
【0012】
本発明の記録装置には、記録ヘッドを保持し走査するキャリッジと、記録ヘッドの吐出口面に当接できるキャップと、キャップを吐出口面に対し当接する方向へ変位させるカムとが設けられている。さらに、カムを駆動するカム駆動手段と、キャップを吐出口面に対し離間する方向へ付勢する付勢手段とが設けられており、カム駆動手段を駆動することによりキャップを吐出口面から離間させる。
【0013】
本発明の記録装置には、キャリッジの走査方向における位置を検出するための検出手段と、検出手段により検出されたキャリッジの位置に基づいて、キャップが吐出口面から離間したか判定する判定手段とがさらに設けられている。
【発明の効果】
【0014】
本発明によれば、センサを追加することなくキャップと記録ヘッドのフェイス面の当接および離間状態を判定でき、安定的にキャップを記録ヘッドの吐出口面から離間させることができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る記録装置の一実施形態の構成図である。
【図2】回復機構部の斜視図である。
【図3】図2のAA断面の概略図を示す。
【図4】図2のBB断面の概略図を示す。
【図5】キャップの微小往復動作に関わる動作シーケンスである。
【図6】従来技術の記録装置におけるキャップおよびキャップの動作に関連する箇所の概略構成図である。
【発明を実施するための形態】
【0016】
以下に、添付の図面に基づき、本発明の実施の形態の詳細について説明する。なお、同一の機能を有する構成には添付図面中、同一の番号を付与し、その説明を省略することがある。
【0017】
最初に、本実施形態に関わる記録装置の基本構成について説明する。図1に、本発明に係る記録装置の一実施形態の構成図を示す。記録装置20は各機構部の役割から概して、給紙部、用紙搬送部、排紙部、キャリッジ部、回復機構部などに分類することができる。以下、図1を用いて各機構部の説明を行う。
【0018】
[給紙部]
給紙部においては、不図示の記録媒体を積載する圧板1、記録媒体を1枚ずつ給紙する給紙ローラ2、記録媒体を分離する分離ローラ(不図示)等がベース3に取り付けられている。給紙部の記録媒体は用紙搬送部に搬送される。
【0019】
[用紙搬送部]
シャーシ4には、記録媒体を搬送する搬送ローラ5が取り付けられている。搬送ローラ5には、従動する複数のピンチローラ6が当接して設けられている。ピンチローラ6は搬送ローラ5に対し所定圧で当接しており、記録媒体の搬送力を生み出している。
【0020】
給紙部から用紙搬送部に送られた記録媒体は、搬送ローラ5とピンチローラ6とのローラ対に送られ、記録ヘッド9の、インクの吐出口が設けられた吐出口面(フェイス面)と間隔をおいて対向するプラテン7上に搬送される。プラテン7には搬送基準面となるリブが形成されている。リブは記録ヘッド9のフェイス面と記録媒体の記録面との隙間を管理すると同時に、記録媒体の波打ちを抑制する役割を果たしている。記録媒体は、用紙搬送部の位置で記録が行われ、排紙部に搬送される。
【0021】
[排紙部]
排紙部は、排紙ローラ8と、従動する複数の拍車(不図示)などから構成されている。拍車は排紙ローラ8に対して所定圧で当接されており、用紙搬送部から搬送された画像形成された記録媒体は、排紙ローラ8と拍車によって挟持されることで記録装置20の内部から排出される。
【0022】
[キャリッジ部]
キャリッジ部は、記録ヘッド9を搭載するためのキャリッジ10を有しており、そのキャリッジ10は、ガイドシャフト11およびガイドレール12によって支持されている。ガイドシャフト11は、記録媒体の搬送方向に対して直角方向にキャリッジ10を往復走査させるように案内支持している。ガイドレール12は、キャリッジ10の後端を保持して、記録ヘッド9のフェイス面と記録媒体との隙間を維持する役割を果たしている。またキャリッジ10は、シャーシ4に取り付けられたキャリッジモータ(キャリッジ駆動手段)13によりタイミングベルト14を介して駆動される。また、キャリッジ10に設けられたキャリッジセンサ(不図示)により、エンコーダスケール15を読み取ることでキャリッジ10の位置を検出し走査制御を行う。キャリッジセンサとエンコーダスケール15とでキャリッジ10の位置が検出可能な検出手段を構成しているが、検出手段はキャリッジ10の位置を検出できればよいので、この構成に限定されない。
【0023】
上記の用紙搬送部およびキャリッジ部の構成において記録媒体に画像形成する場合、搬送ローラ5およびピンチローラ6からなるローラ対により記録媒体を副走査方向に搬送する。また、記録ヘッド9を搭載したキャリッジ10を副走査方向とは垂直な方向である主走査方向に移動させて、記録ヘッド9を目的の画像形成位置に配置してインクを吐出させる。記録ヘッド9は、電気基板からの信号に従って、記録媒体に対してインクを吐出する。本実施形態の記録装置20は、記録媒体の副操作方向への搬送と、記録ヘッド9の主走査方向の移動およびインク吐出とを交互に繰り返すことにより記録媒体上に画像を形成する構成となっている。
【0024】
[回復機構部]
回復機構部16は、記録ヘッド9のインク吐出性能を維持回復するためのものである。図2に回復機構部16の斜視図を示す。
【0025】
回復機構部16は主に、記録ヘッド9のフェイス面に対し当接および離間が可能なキャップ21と、記録ヘッド9の吐出口からインク吸引などを行う吸引ポンプ28と、記録ヘッド9のフェイス面を拭き取り清掃するためのワイパー22の3つから構成される。
【0026】
吸引ポンプ28やワイパー22の駆動には不図示のモータ(カム駆動手段)を用いている。モータの一方向の回転で吸引ポンプ28が作動し、反対方向の回転でワイパー22のワイピング動作およびキャップ21の昇降動作(記録ヘッド9のフェイス面への当接離間動作)が行われる。
【0027】
ゴム等の弾性部材からなるワイパー22は、ワイパーホルダ27に固定されている。ワイパーホルダ27は、図2に示すY方向(記録ヘッド9のインク吐出口の配列方向)に移動可能である。そして、記録ヘッド9がキャリッジ10の移動によりワイパー22の可動範囲に位置する際に、+Y方向にワイパーホルダ27が移動することによって、ワイパー22によるワイピング動作を行う。ワイピング動作が終了すると、キャリッジ10をワイパーホルダ22の可動範囲外に退避させてからワイパーホルダ27を−Y方向へと移動させ、キャリッジ10が移動しても記録ヘッド9のフェイス面とワイパー22とが干渉しないようする。
【0028】
ワイピング動作の際、ワイパー22はワイパークリーナ(不図示)に当接し、ワイパー22に付着したインクを除去する。
【0029】
キャップ1の内側部分には、インク吸収体23が設けられている。このインク吸収体23には、後述する予備吐出動作や吸引動作で生じるインクが吸収されている。キャップ21と記録ヘッド9のフェイス面とが離間した状態で、キャップ21ないしインク吸収体23に残っているインクを吸引ポンプ28で吸引する。
【0030】
図3に、図2のAA断面の概略図を示す。なお、キャップ21の昇降動作(記録ヘッド9のフェイス面への当接離間動作)に関わる部分のみ図示している。ワイピング動作およびキャップ21の昇降動作などの一連動作は、メインカム32およびこれに従動する複数のカムやアーム等によって所定の動作を行っている。なお、メインカム32の位置はフォトインタラプタ等の位置検出センサ(不図示)によって検出している。
【0031】
モータ(カム駆動手段)の駆動によってメインカム32が回動し、この回動によりキャップ21が取付けられたキャップレバー33が直接動かされることで、キャップ21が記録ヘッド9のフェイス面と当接する方向(+Z方向)へと変位する。一方、記録ヘッド9と離間させる方向(−Z方向)へは、キャップレバー33に設けられた引張りばね(付勢手段)35の付勢力により変位させている。なお、キャップ21は、記録ヘッド9のフェイス面との当接面21aとは反対の面に設けられた圧縮ばね(第2付勢手段)34でキャップ21を記録ヘッド9のフェイス面に対し一定の接触圧で付勢することで、安定した密着性を維持することが可能である。
【0032】
これにより、キャップ21およびその周囲の部品に生じる自重と、キャップ21を記録ヘッド9から離間する際に引張りばね35に生じる張力の方向を概ね一致させることで、引張りばね35の張力が低減でき、部品のクリープ変形が抑制される。
【0033】
図4に図2のBB断面の概略図を示す。なお、キャップ21付近のみを示している。キャップ21を保持するキャップホルダ(キャップ保持手段)36は、インク排出パイプ37および大気連通パイプ38を備えている。そして、キャップ21には、それぞれのパイプ37、38に対応した貫通穴39が設けられており、キャップ21は、キャップホルダ36のパイプ37、38の外面と密着するようにキャップホルダ36に取り付けられている。これにより、キャップ21とキャップホルダ36と間でシール面が形成されると同時に、摩擦力を発生させることでキャップ21をキャップホルダ36に保持している。
【0034】
吸引ポンプ28は、キャップ21が記録ヘッド9のフェイス面に密着しているときに、インク排出パイプ37を介して吸引することで、吐出口を介して記録ヘッド9内のインク流路に存在する塵埃、固着物、気泡等を吸引除去することができる(吸引動作)。
【0035】
さらに、画像の記録に寄与しないインクを記録ヘッド9からキャップ21に吐出する、いわゆる予備吐出動作によりインク吸収体23インクが吸収され、キャップ21に溜まる。吸引ポンプ28は、キャップ21に溜まったインクをインク排出パイプ37から排出するためにも動作可能である。すなわち、予備吐出されてキャップ21に保持されるインクが所定量に達したときに、吸引ポンプ28を動作させることにより、キャップ21内に保持されていたインクを、インク排出パイプ37を通して不図示のインク吸収部材に移送することができる。
【0036】
吸引ポンプ28の形態としては、例えばチューブポンプ形態のものが用いられる。これは、可撓性を有するチューブと、そのチューブの少なくとも一部を沿わせて保持する曲面が形成された部材と、この部材に向けてチューブを押圧することが可能なローラと、このローラを支持し、回転可能なローラ支持部とを有するものである。すなわち、ローラ支持部を所定方向に回転させることにより、ローラが曲面形成部材上において可撓性チューブを押し潰しながら回動する。これに伴い、キャップ21と記録ヘッド9とで形成される密閉空間に負圧が生じ、インクが記録ヘッド9の吐出口より吸引され、そのインクは、キャップ21からインク排出パイプ37を介してチューブないし吸引ポンプ28に引き込まれる。そこに引き込まれたインクは、さらに下流側に設けられたインク吸収部材に向けて移送される。
【0037】
なお、上述していないが、キャリッジ10の走査を制御する、中央演算装置や記憶部を有する制御部も記録装置20には設けられている。また、制御部は、キャップ21が記録ヘッド9と当接あるいは離間しているかを判断する判断手段の役割もある。
【0038】
以下に、本発明の特徴である、キャップ21を記録ヘッド9のフェイス面から離間させる動作について説明する。本発明のキャップ21を記録ヘッド9のフェイス面から離間させる動作は、以下の3つの場合に特に適している。
【0039】
1)記録装置の電源オフ状態のとき、インクの蒸発を防ぐためにキャップと記録ヘッドのフェイス面とが当接している。この電源オフ状態が長く続き、キャップと記録ヘッドのフェイス面との当接が長く続いた場合。
【0040】
2)出荷した記録装置がユーザ先へ到着した直後であり、ワイピング動作や吸引動作が僅かあるいは全く行われていない場合。
【0041】
3)記録装置の動作が異常終了した後の復帰動作の際などキャップの状態(キャップと記録ヘッドとの当接離間状態)を判断する事が困難な場合。
【0042】
図5に、キャップ21の微小往復動作に関わる動作シーケンスを示す。最初に、キャリッジモータの駆動前におけるキャリッジ10の駆動方向(図1のX方向)における位置を測定して制御部に記憶する(S1)。なお、キャリッジ10の位置は、キャリッジ10の走査制御を行うためにキャリッジ10に設けられているキャリッジセンサを利用して測定すればよい。以降、キャリッジ10の位置を測定する必要がある場合も同様である。
【0043】
次に、キャリッジ10を図2に示す+X方向へと駆動させるようにキャリッジモータを駆動させる(S2)。この時のキャリッジモータのPWM(パルス幅変調)のデューティは30%、動作時間は0.1秒としている。これは、本実施形態においてキャップ21が記録ヘッド9のフェイス面へ貼り付いている場合においても、キャリッジ10に過負荷を生じさせることなく駆動できる設定値であり、実験的に求められたものである。よって、記録装置20の種類などに応じて任意に変更可能である。なお、キャップ21が記録ヘッド9のフェイス面に対して離間した状態においては上記設定値によるキャリッジ10の移動距離は約8ミリである。また、最初のキャリッジ10の移動方向については特に制約は設けない。
【0044】
キャリッジ10の+X方向への駆動が終了したら、その駆動後のキャリッジ10の位置を測定し制御部に記憶する(S3)。ここで、キャップ21が記録ヘッド9のフェイス面から離間したか否かを判定する(S4)。
【0045】
キャップ21と記録ヘッド9のフェイス面とが当接ないしは離間状態であるかを判定する基準として、キャリッジ10の、キャリッジモータの駆動前の位置(第1位置)と駆動後の位置(第2位置)とからキャリッジ10の移動量を制御部で算出する。そして、その移動量と予め設定した閾値との比較を行っている。移動量が閾値以上であった場合は、キャップ21と記録ヘッド9のフェイス面とが離間状態であると判定し、キャリッジ10の微小往復動作を停止させる。一方、移動量が閾値に達しなかった場合は、キャップ21と記録ヘッド9のフェイス面とが当接状態つまりキャップ21が記録ヘッド9のフェイス面に貼り付いていると判定する。なお、本実施形態では閾値を30スリット(150LPI(Line per inch)換算で5.08ミリ)としている。
【0046】
キャップ21と記録ヘッド9のフェイス面とが当接状態にあると制御部で判定した場合はキャリッジ10の微小往復動作を継続する。具体的には、キャリッジモータを再度駆動しキャリッジ10を再度駆動させるが、駆動方向は、前回のキャリッジ10の走査方向と反対(ここでは−X方向)とする。また、この時のキャリッジモータのPWMのデューティは30%、動作時間は0.1秒である。(S5)。キャリッジモータの駆動後、キャリッジ10の位置を測定し制御部に記憶し(S3)、再度キャップ21が記録ヘッド9のフェイス面から離間したか否かを制御部で判定する(S4)。キャップ21と記録ヘッド9のフェイス面とが離間状態にあると判定されるまで、上記の3つのステップ(S5、S3、S4)を繰り返す。
【0047】
以上説明したように、本発明の記録装置20では、キャップ21と記録ヘッド9のフェイス面とが当接状態なのか離間状態なのかを検出するためのセンサを増設せず、キャリッジ10の走査制御のためのセンサを利用している。そのため、コストアップを抑制することができる。また、従来技術のように、インクミストによってセンサが汚れることがないので、安定してキャップ21を記録ヘッド9のフェイス面から離間させることができ、そのため、信頼性の高い記録装置を提供することができる。
【符号の説明】
【0048】
9 記録ヘッド
10 キャリッジ
13 キャリッジモータ(キャリッジ駆動手段)
20 記録装置
21 キャップ
32 メインカム
35 引張りばね(付勢手段)
【特許請求の範囲】
【請求項1】
記録ヘッドを保持し走査するキャリッジと、前記記録ヘッドの吐出口面に当接できるキャップと、前記キャップを前記吐出口面に対し当接する方向へ変位させるカムと、前記カムを駆動するカム駆動手段と、前記キャップを前記吐出口面に対し離間する方向へ付勢する付勢手段と、を備え、前記カム駆動手段を駆動することにより前記キャップを前記吐出口面から離間させる記録装置であって、
前記キャリッジの走査方向における位置を検出するための検出手段と、
前記検出手段により検出された前記キャリッジの位置に基づいて、前記キャップが前記吐出口面から離間したか判定する判定手段と、
を備えることを特徴とする記録装置。
【請求項2】
前記キャップを保持するキャップ保持手段と、該キャップ保持手段に配され前記キャップを前記吐出口面に対し当接する方向へ付勢する第2付勢手段と、を備えている、請求項1に記載の記録装置。
【請求項3】
前記キャップを前記吐出口面から離間する際に前記キャリッジが往復動作をさせ、前記判定手段が、前記キャップが離間したと判定すると前記キャリッジの動作を停止させる、請求項1または2に記載の記録装置。
【請求項4】
前記検出手段により検出され、前記判定手段に用いられる前記キャリッジの走査方向の位置は、前記キャリッジを駆動させるキャリッジ駆動手段の駆動前の位置である第1位置と前記キャリッジ駆動手段の駆動後の位置である第2位置とである請求項1から3のいずれか1項に記載の記録装置。
【請求項5】
前記判定手段は前記第1位置と前記第2位置の差である移動量が所定の閾値以上である場合に、前記離間状態であると判断する請求項4に記載の記録装置。
【請求項6】
記録ヘッドを保持し走査するキャリッジと、前記記録ヘッドの吐出口面に当接できるキャップと、前記キャップを前記吐出口面に対し当接する方向へ変位させるカムと、前記カムを駆動するカム駆動手段と、前記キャップを前記吐出口面に対し離間する方向へ付勢する付勢手段と、を備え、前記カム駆動手段を駆動することにより前記キャップを前記吐出口面から離間させる記録装置における、吐出口面に当接していたキャップの離間方法であって、
前記キャリッジを駆動させるキャリッジ駆動手段の駆動前の前記キャリッジの位置を測定するステップと、
前記キャリッジを駆動させるステップと、
前記キャリッジ駆動手段の駆動後の前記キャリッジの位置を測定するステップと、
前記キャリッジ駆動手段の駆動前と駆動後の前記キャリッジの位置とを基に前記キャップが前記吐出口面から離間したかを判断するステップと、を有するキャップの離間方法。
【請求項7】
前記判断するステップで、前記キャップが前記吐出口面から離間したと判断するまで、前記キャリッジ駆動手段の駆動前の前記キャリッジの位置を測定するステップと、前記キャリッジを駆動させるステップと、前記キャリッジ駆動手段の駆動後の前記キャリッジの位置を測定するステップと、前記判断するステップと、を繰り返す、請求項6に記載のキャップの離間方法。
【請求項8】
前記判断するステップでは、前記キャリッジ駆動手段の駆動前の前記キャリッジの位置と前記キャリッジ駆動手段の駆動後の前記キャリッジの位置との差から移動量を求める、請求項6または7に記載のキャップの離間方法。
【請求項9】
前記判断するステップでは、前記移動量が予め設定した閾値を超えているかを判断する請求項8に記載のキャップの離間方法。
【請求項1】
記録ヘッドを保持し走査するキャリッジと、前記記録ヘッドの吐出口面に当接できるキャップと、前記キャップを前記吐出口面に対し当接する方向へ変位させるカムと、前記カムを駆動するカム駆動手段と、前記キャップを前記吐出口面に対し離間する方向へ付勢する付勢手段と、を備え、前記カム駆動手段を駆動することにより前記キャップを前記吐出口面から離間させる記録装置であって、
前記キャリッジの走査方向における位置を検出するための検出手段と、
前記検出手段により検出された前記キャリッジの位置に基づいて、前記キャップが前記吐出口面から離間したか判定する判定手段と、
を備えることを特徴とする記録装置。
【請求項2】
前記キャップを保持するキャップ保持手段と、該キャップ保持手段に配され前記キャップを前記吐出口面に対し当接する方向へ付勢する第2付勢手段と、を備えている、請求項1に記載の記録装置。
【請求項3】
前記キャップを前記吐出口面から離間する際に前記キャリッジが往復動作をさせ、前記判定手段が、前記キャップが離間したと判定すると前記キャリッジの動作を停止させる、請求項1または2に記載の記録装置。
【請求項4】
前記検出手段により検出され、前記判定手段に用いられる前記キャリッジの走査方向の位置は、前記キャリッジを駆動させるキャリッジ駆動手段の駆動前の位置である第1位置と前記キャリッジ駆動手段の駆動後の位置である第2位置とである請求項1から3のいずれか1項に記載の記録装置。
【請求項5】
前記判定手段は前記第1位置と前記第2位置の差である移動量が所定の閾値以上である場合に、前記離間状態であると判断する請求項4に記載の記録装置。
【請求項6】
記録ヘッドを保持し走査するキャリッジと、前記記録ヘッドの吐出口面に当接できるキャップと、前記キャップを前記吐出口面に対し当接する方向へ変位させるカムと、前記カムを駆動するカム駆動手段と、前記キャップを前記吐出口面に対し離間する方向へ付勢する付勢手段と、を備え、前記カム駆動手段を駆動することにより前記キャップを前記吐出口面から離間させる記録装置における、吐出口面に当接していたキャップの離間方法であって、
前記キャリッジを駆動させるキャリッジ駆動手段の駆動前の前記キャリッジの位置を測定するステップと、
前記キャリッジを駆動させるステップと、
前記キャリッジ駆動手段の駆動後の前記キャリッジの位置を測定するステップと、
前記キャリッジ駆動手段の駆動前と駆動後の前記キャリッジの位置とを基に前記キャップが前記吐出口面から離間したかを判断するステップと、を有するキャップの離間方法。
【請求項7】
前記判断するステップで、前記キャップが前記吐出口面から離間したと判断するまで、前記キャリッジ駆動手段の駆動前の前記キャリッジの位置を測定するステップと、前記キャリッジを駆動させるステップと、前記キャリッジ駆動手段の駆動後の前記キャリッジの位置を測定するステップと、前記判断するステップと、を繰り返す、請求項6に記載のキャップの離間方法。
【請求項8】
前記判断するステップでは、前記キャリッジ駆動手段の駆動前の前記キャリッジの位置と前記キャリッジ駆動手段の駆動後の前記キャリッジの位置との差から移動量を求める、請求項6または7に記載のキャップの離間方法。
【請求項9】
前記判断するステップでは、前記移動量が予め設定した閾値を超えているかを判断する請求項8に記載のキャップの離間方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−86424(P2013−86424A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−230866(P2011−230866)
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]