
設備識別プログラム、方法及び装置
【課題】撮影された電柱や鉄塔などの設備を識別する。
【解決手段】本方法は、上辺又は底辺に垂直な基準線等が特定されており且つ上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された画像と当該撮影点の撮影位置データと基準線等の方位角とを格納する画像データ格納部に格納されている第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出し、抽出された画像部分を通る直線と基準線等との関係から画像部分の変位角を算出すると共に、当該変位角と基準線等の方位角とにより、画像部分の方位角を算出し、撮影点の撮影位置データと算出された画像部分の方位角とから特定される範囲に含まれる識別対象設備のうち最も撮影点に近い識別対象設備の識別子を、識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出する。
【解決手段】本方法は、上辺又は底辺に垂直な基準線等が特定されており且つ上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された画像と当該撮影点の撮影位置データと基準線等の方位角とを格納する画像データ格納部に格納されている第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出し、抽出された画像部分を通る直線と基準線等との関係から画像部分の変位角を算出すると共に、当該変位角と基準線等の方位角とにより、画像部分の方位角を算出し、撮影点の撮影位置データと算出された画像部分の方位角とから特定される範囲に含まれる識別対象設備のうち最も撮影点に近い識別対象設備の識別子を、識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像において電柱や鉄塔などの設備を識別するための技術に関する。
【背景技術】
【0002】
例えば特開2001−273481号公報には、架空配線された電柱を簡便に作業性よく写真撮影し、これを規格化し、一元的に管理するための技術が開示されている。より具体的には、電柱を広角の3次元像の魚眼像として撮像し、魚眼像の情報を2次元映像の情報に変換し、2次元映像の情報をビジュアル画像に変換して記録もしくは表示し、又は、ビジュアル画像をさらにデジタル情報に変換して記録もしくは表示し、電柱の全景・設置環境を確認する。しかし、カメラの方向が異なると共に、走行している車両からの画像を処理するものではない。
【0003】
また、特開2002−357557号公報には、道路や周辺施設等のチェックするにあたり作業者の労力負担を軽減することのできる、道路や周辺施設等の管理システムが開示されている。具体的には、巡回車に搭載された撮影カメラにより取得された道路や周辺施設等の映像データを記録するデータ記録部と、映像データを画像処理することにより、道路や周辺施設等の異常を検出する画像処理部と、第1の日付の撮影により取得された第1映像データと比較すべき映像データを、第1の日付とは異なる第2の日付の撮影により取得された第2映像データ群から特定する映像データ特定部とを備える。そして、画像処理部は、第1映像データと第2映像データとを画像処理技術を用いて比較対照することにより、道路や周辺施設等の異常を検出するものである。撮影された設備が地図上のどの設備であるかを識別するようなことは考慮されていない。
【0004】
さらに、特開平10−294932号公報には、巡視作業等で撮影する位置が事前に指定されている場所での撮影を自動的に行うデジタル画像撮影装置が開示されている。具体的には、撮影予定場所の一覧を格納したデータベースと、現在位置を計測するDGPS(Differential Global Positioning System)と、データベースとDGPSの位置情報からデータベースに記録されている位置の範囲内に入ったことを識別する手段と、デジタル的に画像を撮影する手段と、撮影された画像を記録する手段とを備える。そして、撮影場所の範囲内に入ったと判断された場合に撮影手段で撮影した画像を記録手段に記録する。これによれば、巡視箇所の撮影を自動化することが可能となる。また、撮影の位置が正確に分かっていなくても、機器や地点の名称で指定することにより撮影場所の設定を行うことが可能となる。しかしながら、画像から、特定の設備を識別するような技術が開示されているわけではない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−273481号公報
【特許文献2】特開2002−357557号公報
【特許文献3】特開平10−294932号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
道路や道路周辺に設置された電柱や鉄塔などの設備を1つ1つ人が巡回するのは非常にコストがかかるため、このコストを下げるために自動車を走行中に設備の画像を撮影することが考えられる。しかしながら、撮影された設備が、管理しているどの設備であるかを自動的に識別するような技術は従来存在していない。
【0007】
従って、本発明の目的は、撮影された電柱や鉄塔などの設備を識別するための新規な技術を提供することである。
【課題を解決するための手段】
【0008】
本発明の設備識別方法は、(A)上辺又は底辺に垂直な基準線又は基準点が特定されており且つ上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された第1画像と当該撮影点の撮影位置データと基準線又は基準点の方位角とを格納する第1画像データ格納部に格納されている第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出するステップと、(B)抽出された画像部分を通る直線と基準線又は基準点を通り上辺又は底辺に垂直な直線との関係から画像部分の変位角を算出すると共に、当該変位角と第1画像データ格納部に格納されている基準線又は基準点の方位角とにより、画像部分の方位角を算出する方位角算出ステップと、(C)第1画像データ格納部に格納されている撮影点の撮影位置データと算出された画像部分の方位角とから特定される範囲に含まれる識別対象設備のうち最も撮影点に近い識別対象設備の識別子を、識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出するステップとを含む。
【0009】
このようにすれば、カメラが設置された車両が走行しながら撮影された画像であっても、電柱や鉄塔などの比較的細い設備でも適切に識別できるようになる。
【0010】
また、上で述べた方位角算出ステップが、基準線又は基準点を通り上辺又は底辺に垂直な直線から、抽出された画像部分を通る直線までの距離から画像部分の変位角を算出するステップと、変位角と方位角との和により、画像部分の方位角を算出するステップとを含むようにしても良い。第1画像の定義より、距離が分かれば角度が判明するため、設備の方位角が得られるようになる。
【0011】
さらに、上記設備識別方法は、天頂に向けた魚眼レンズで撮影され且つ第2画像データ格納部に格納されている第2画像に対して極座標逆変換により第1画像を生成し、第1画像データ格納部に格納するステップをさらに含むようにしても良い。このようにすれば、安価に第1画像を得ることができるようになる。
【0012】
なお、上で述べた方位角算出ステップが、第1画像に対して極座標変換により第3画像を生成するステップと、第3画像において画像部分に相当する部分を通る直線と基準線又は基準点を通り上辺又は底辺に垂直な直線に相当する第2の直線とがなす角度を、画像部分の変位角として算出するステップとを含むようにしてもよい。このような極座標変換を実施することによって、例えば電線などを認識するような後続の処理もやりやすくなる。
【0013】
なお、上で述べたような処理をハードウエアに実施させるためのプログラムを作成することができ、当該プログラムは、例えばフレキシブル・ディスク、CD−ROM、光磁気ディスク、半導体メモリ、ハードディスク等のコンピュータ読み取り可能な記憶媒体又は記憶装置に格納される。なお、処理途中のデータについては、コンピュータのメモリ等の記憶装置に一時保管される。
【発明の効果】
【0014】
本発明によれば、撮影された設備を適切に識別することができるようになる。
【図面の簡単な説明】
【0015】
【図1】図1は、撮影の様子を示す模式図である。
【図2】図2は、測定装置の機能ブロック図である。
【図3】図3は、測定処理の処理フローを示す図である。
【図4】図4は、第1の実施の形態において撮影される画像の一例を示す図である。
【図5】図5は、撮影された画像と共に格納されるデータの一例を示す図である。
【図6】図6は、第1の実施の形態における解析装置の機能ブロック図である。
【図7】図7は、第1の実施の形態における解析処理の処理フローを示す図である。
【図8】図8は、極座標逆変換について説明するための図である。
【図9】図9は、極座標逆変換について説明するための図である。
【図10】図10は、画像認識処理について説明するための図である。
【図11】図11は、設備識別処理の処理フローを示す図である。
【図12】図12は、認識された設備と進行方向との変位角を算出する処理を説明するための図である。
【図13】図13は、設備識別のための処理を説明するための図である。
【図14】図14は、設備位置DBに格納されるデータの一例を示す図である。
【図15】図15は、識別結果格納部に格納されるデータの一例を示す図である。
【図16】図16は、極座標変換後の処理について説明するための図である。
【図17】図17は、第3の実施の形態における解析装置の機能ブロック図である。
【図18】図18は、第3の実施の形態における解析処理の処理フローを示す図である。
【図19】図19は、コンピュータの機能ブロック図である。
【発明を実施するための最良の形態】
【0016】
[実施の形態1]
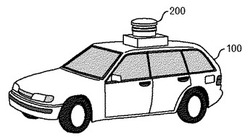
本実施の形態では、図1に示すように、車両100にカメラ200を搭載し、この車両100が道路を走行して、カメラ200により所定間隔で撮影を行うものとする。以下でも述べるように、車両100には、測定装置300も搭載されており、当該測定装置300に含まれるGPS(Global Positioning System)装置の測定間隔に応じて所定間隔が決定される。また、本実施の形態では、カメラ200には、魚眼レンズが用いられており、魚眼レンズを天頂に向けた形で設置する。
【0017】
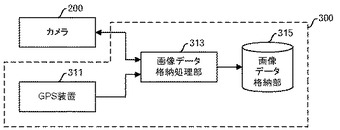
図2に車両100に搭載される測定装置300の機能ブロック図を示す。測定装置300は、GPS装置311と、画像データ格納処理部313と、画像データ格納部315とを有する。画像データ格納処理部313は、所定間隔でカメラ200に画像の撮影を実施させ、当該カメラ200で撮影された画像の画像データとGPS装置311において測定された撮影位置データ等とを対応付けて画像データ格納部315に格納する。
【0018】
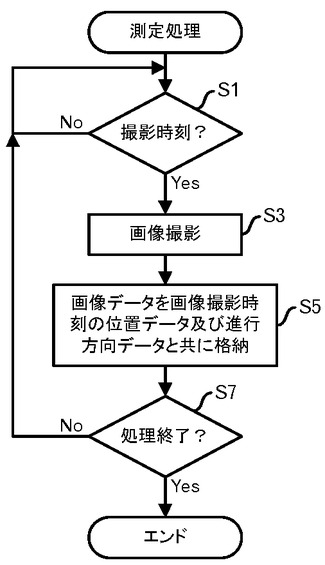
図3に測定装置300の処理フローを示す。画像データ格納処理部313は、撮影時刻になるまで待機し(ステップS1)、所定時間経過して撮影時刻になると、カメラ200に対して指示を行う。カメラ200は、画像データ格納処理部313からの指示に応じて撮影を行い(ステップS3)、撮影した画像の画像データを画像データ格納処理部313に出力する。画像データ格納処理部313は、カメラ200からの画像データを、GPS装置311によって測定された、画像撮影時刻の撮影位置データ及び進行方向データと共に、画像データ格納部315に格納する(ステップS5)。このような処理を、処理終了を指示されるまで繰り返す(ステップS7)。
【0019】
なお、進行方向データは、方位角であり、例えば直前に測定された位置と今回測定された位置とを結ぶ直線から、その方位角を算出する。
【0020】
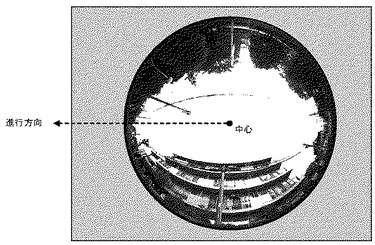
画像データ格納部315に格納されるデータの一例を図4及び図5に示す。図4に、本実施の形態において魚眼レンズを伴うカメラ200で撮影された画像の一例を示す。図4のように、本実施の形態では、円形の画像部分の中心が天頂を向くように調整されており、車両100への設置態様によって、予め画像内の進行方向を特定しておく。本実施の形態では、図4の画像において水平左方向が進行方向であるものとする。
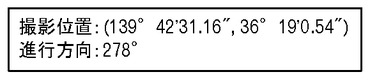
【0021】
また、画像データ格納部315には、図5のようなデータが、画像データ毎に対応付けられて格納される。すなわち、撮影位置データとして緯度経度と、進行方向である方位角とが格納される。緯度経度ではなく、X座標値及びY座標値を算出した上で、格納しても良い。画像データ格納部315に格納されたデータは、以下で述べる解析処理に用いられる。
【0022】
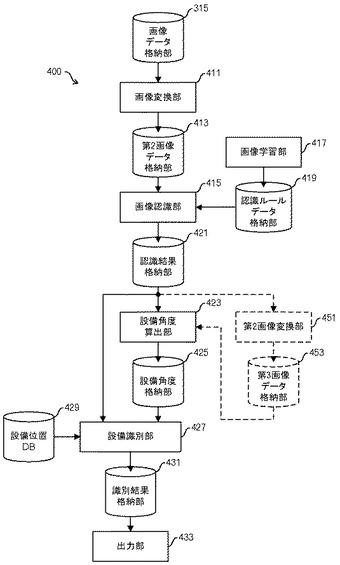
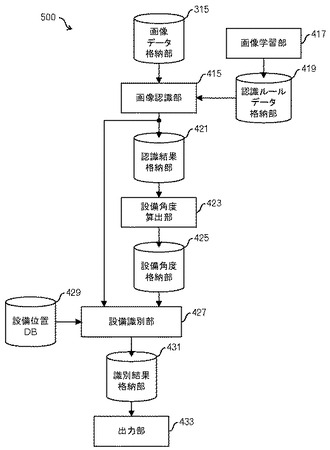
次に、画像データ格納部315に格納されたデータを用いて、画像中の特定の設備(本実施の形態では電柱及び鉄塔)を識別する処理を行う解析装置400を説明する。図6に、解析装置400の機能ブロック図を示す。解析装置400は、(A)画像データ格納部315と、(B)画像データ格納部315に格納されている画像データに対して極座標逆変換処理を実施する画像変換部411と、(C)画像変換部411の処理結果を格納する第2画像データ格納部413と、(D)認識ルールデータ格納部419と、(E)認識ルールデータ格納部419に格納される認識ルールを生成する画像学習部417と、(F)認識ルールデータ格納部419に格納されている認識ルールデータを用いて第2画像データ格納部413に格納されている画像データに対して画像認識処理を実施する画像認識部415と、(G)画像認識部415の処理結果を格納する認識結果格納部421と、(H)認識結果格納部421に格納されているデータを用いて処理を行う設備角度算出部423と、(I)設備角度算出部423の処理結果を格納する設備角度格納部425と、(J)各設備について位置データを格納する設備位置データベース(DB)429と、(K)設備角度格納部425及び認識結果格納部421と設備位置DB429とに格納されているデータと用いて設備識別処理を実施する設備識別部427と、(L)設備識別部427による処理結果を格納する識別結果格納部431と、(M)識別結果格納部431に格納されているデータを出力する出力部433とを有する。
【0023】
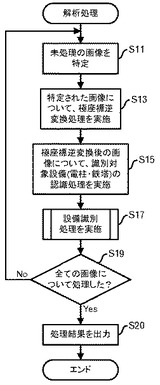
次に、解析装置400の処理内容を図7乃至図15を用いて説明する。まず、画像変換部411は、画像データ格納部315に格納されている画像のうち未処理の画像を特定する(図7:ステップS11)。そして、画像変換部411は、特定された画像について、極座標逆変換処理を実施し、処理後の画像データ及び画像データに対応付けられているデータ(撮影位置データ及び進行方向データ)を第2画像データ格納部413に格納する(ステップS13)。
【0024】
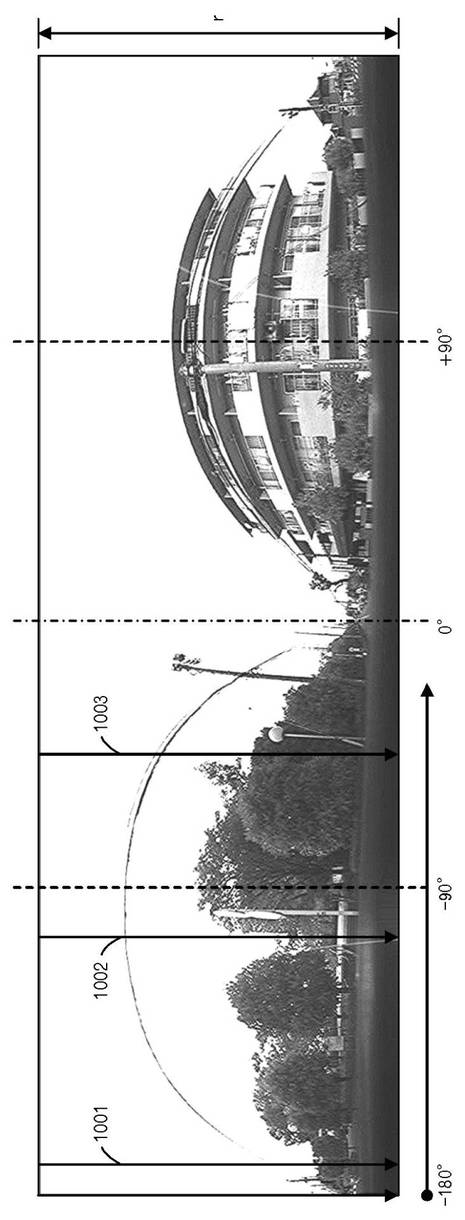
ステップS13については図8を用いて説明する。なお、円形の画像部分の中心位(Cx,Cy)を特定しておく。さらに、円形の画像部分の半径rも特定しておく。
【0025】
さらに、カメラ200を車両100に設置する場合には、以下の演算が簡単になるように、進行方向が画像上の0度、90度など分かりやすい位置になるように調整しておく。なお、本実施の形態では0度が進行方向である。また、図8では、水平方向右が−180度であり、反時計回りに角度が設定されているものとする。
【0026】
このような前提の下、以下の演算を行う。
(1)極座標逆変換後の画像として、幅2πr[画素]、高さr[画素]の矩形の画像を用意する。
(2)極座標逆変換後の画像における水平軸の座標に相当する変数xを、−πrからπrまで、1刻みで変化させながら以下の演算を繰り返す。
(ア)角度変数angle=x*(360/(2πr))(以下、(1)式と呼ぶ。)を算出し、画像の中心からangle度の方向に長さrの線分を引く。図8では、矢印1001乃至1003のような長さrの線分を設定する。
(イ)線分に沿って矢印方向に距離1[画素]毎に画素値を読み取り、極座標逆変換後の画像において左端からxの位置に、読み取った画素値を上から下に垂直に描画する。
【0027】
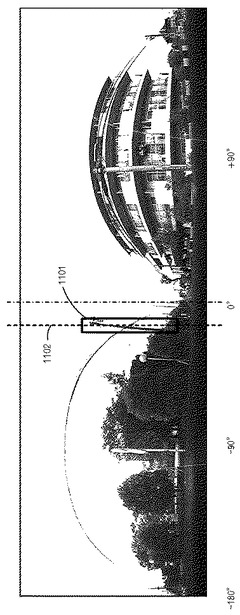
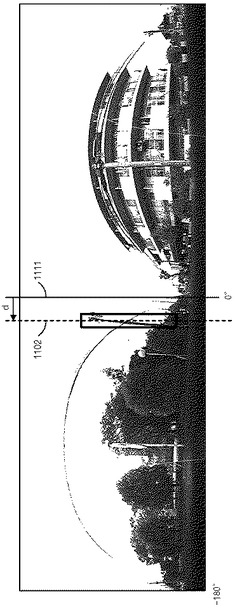
そうすると、例えば図9に示すような画像が生成される。図9の例では、左端が−180度、右端が179度、中心部(本実施の形態では進行方向)が0度となっており、高さはrである。そして、図9に示すように、図8に示された矢印1001乃至1003は、同じ参照番号が付されている鉛直方向矢印にマッピングされる。このように、この矩形の画像の上辺は図8の画像の中心に対応している。また、上で述べた(ア)及び(イ)の処理により、この矩形の画像の底辺(本例では上辺でも同じ)の長さ(距離とも呼ぶ)が、撮影位置(撮影点とも呼ぶ)から見込む角度に比例するようになっている。すなわち、距離が分かれば角度が分かるようになっている。距離と角度の関係は(1)式のとおりであり、距離が分かれば角度も分かるようになる。また、進行方向は0度であるから、図9では上辺及び底辺に垂直な直線で表されるが、この直線上のいずれかの点を進行方向を表す点として特定するようにしても良い。なお、このような極座標逆変換の演算はよく知られており、これ以上述べない。
【0028】
図8のような画像を得るには比較的安価な魚眼レンズを用いることができるが、図8のような画像では、電柱や鉄塔の方向が一定とならないために電柱や鉄塔を認識することは困難である。従って、図9のような画像に変換すれば、電柱や鉄塔の方向が一定となるため、比較的容易に認識することができる。
【0029】
次に、画像認識部415は、認識ルールデータ格納部419に格納されている認識ルールに従って、第2画像データ格納部413に格納されている極座標逆変換後の画像について、識別対象設備(認識対象設備であるが、識別対象設備と同じであり、電柱及び鉄塔など)の認識処理を実施し、処理結果として認識された設備を示すマークを含む画像データを第2画像データ格納部413に格納されている撮影位置データ及び進行方向データと共に認識結果格納部421に格納する(ステップS15)。
【0030】
この認識処理自体はよく知られた技術であり、多数の電柱や鉄塔の画像を画像学習部417に入力し、これに対してよく知られた学習アルゴリズムによって画像学習部417は学習を行って認識ルールを生成し、認識ルールのデータを認識ルールデータ格納部419に格納しておく。その後必要なタイミングで、画像認識部415は、認識ルールデータ格納部419に格納されている認識ルールに従って画像認識処理を実施する。
【0031】
例えば、図9に示した画像では、図10において太線枠1101で示すように、電柱が認識される。太線枠1101は、マークである。
【0032】
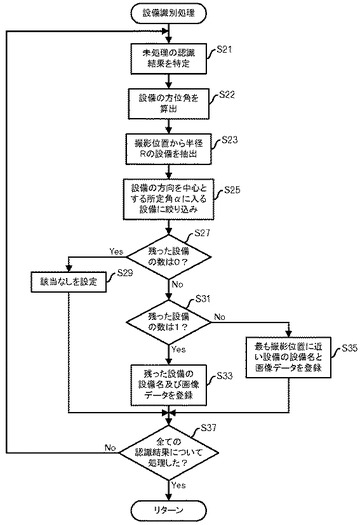
そして、設備角度算出部423及び設備識別部427は、認識結果格納部421及び設備位置DB429に格納されているデータを用いて、設備識別処理を実施する(ステップS17)。設備識別処理については、図11乃至図15を用いて説明する。
【0033】
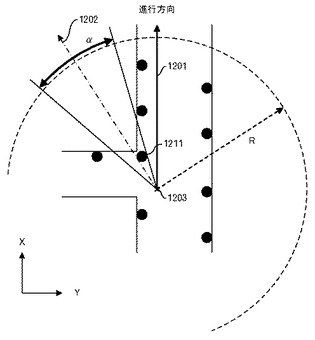
まず、設備角度算出部423は、認識結果格納部421に格納されているデータのうち未処理の認識結果を特定する(図11:ステップS21)。そして、特定された認識結果から、識別対象設備の方位角を算出し、設備角度格納部425に格納する(ステップS22)。まず、進行方向を表す直線1111(図12)から、ステップS15で認識された設備を含む矩形1101(図10)の中心線1102までの距離dを算出する。なお、図12の例では、中央から左の角度が負、右の角度が正となっているので、直線1111から左側に中心線1102が含まれる場合には距離dは負の値となり、直線1111から右側に中心線1102が含まれる場合には距離dは正の値となる。図12の例では、中心線1102は直線1111より左側にあるので、距離dは負の値となる。
【0034】
そして、上で述べた(1)式に従って、距離dから変位角angleを算出する。例えば、変位角(−30度)が算出されたものとする。そして、認識結果格納部421に格納されている進行方向データである方位角と、算出された変位角との和により、識別すべき設備の方位角を算出する。図5に示すように進行方向データである方位角が278度であるから、設備の方位角は248度(=278−30)と算出される。
【0035】
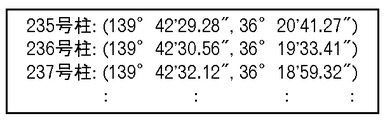
次に、設備識別部427は、認識結果格納部421に格納されている撮影位置データを読み出し、設備位置DB429に登録されている設備(電柱及び鉄塔など)のうち撮影位置から、予め定められている半径Rの設備の設備名を抽出する(ステップS23)。図13に一例を示す。点1203が撮影位置であり、この点1203を中心とする半径Rの範囲に含まれる設備を抽出する。なお、図13において黒丸が電柱を表しており、図13に示している電柱が抽出される。また、図14に、設備位置DB429に格納されるデータの一例を示す。図14の例では、設備名(235号柱など)と、当該設備の緯度経度で表される位置データとが格納されている。本ステップの処理については、緯度経度の値をX座標値及びY座標値に変換してから行うようにしても良い。
【0036】
そして、設備識別部427は、ステップS23において抽出された設備のうち、ステップS22で算出された方位角で特定される方向1202を中心とする所定角αに入る設備に絞り込む(ステップS25)。図13の例では、電柱1211に絞り込まれる。すなわち、電柱1211の設備名を特定し、例えばメインメモリなどの記憶装置に格納する。
【0037】
その後、設備識別部427は、ステップS25で絞り込まれて残った設備の数が「0」であるか判断する(ステップS27)。残った設備の数が「0」であれば、該当設備がないということなので、設備識別部427は、「該当なし」を表すデータを、認識結果格納部421に格納されている画像データのうちマーク内の画像データと共に識別結果格納部431に格納する(ステップS29)。そして、元の処理に戻る。
【0038】
一方、残った設備の数が「0」ではない場合、設備識別部427は、残った設備の数が「1」であるか判断する(ステップS31)。残った設備の数が「1」であれば、設備識別部427は、残った設備の設備名及び認識結果格納部421に格納されている画像データのうちマーク内の画像データを識別結果格納部431に格納する(ステップS33)。そして、元の処理に戻る。
【0039】
さらに、残った設備の数が「1」ではない場合、設備識別部427は、ステップS25で絞り込まれて残った設備のうち、最も撮影位置に近い設備の設備名及び認識結果格納部421に格納されている画像データのうち当該設備についてのマーク内の画像データを識別結果格納部431に格納する(ステップS35)。そして、元の処理に戻る。
【0040】
識別結果格納部431には、例えば図15に示すようなデータが格納される。すなわち、識別された設備の設備名(例えば236号柱)と当該設備の画像データとが対応付けて格納される。
【0041】
設備識別部427は、認識結果格納部421に格納されている全ての認識結果について処理したか判断する(ステップS37)。未処理の認識結果が存在していれば、ステップS21に戻る。一方、全ての認識結果について処理した場合には、元の処理に戻る。
【0042】
図7の説明に戻って、画像変換部411は、画像データ格納部315に格納されている全ての画像について処理したか判断する(ステップS19)。未処理の画像が存在していれば、ステップS11に戻る。一方、全ての画像について処理した場合には、出力部433は、識別結果格納部431に格納されている処理結果である画像データ及び設備名を、表示装置や印刷装置などの出力装置に出力する(ステップS20)。例えば、ユーザからの指示に応じて、要求されたデータのみを出力するようにしても良い。
【0043】
以上のような処理を実施すれば、電柱や鉄塔といった細長い設備についても、安価なカメラにて識別することができるようになる。
【0044】
[実施の形態2]
第1の実施の形態の解析装置400は、例えば図6の点線の構成を含むような形に変形することも可能である。
【0045】
すなわち、解析装置400は、さらに、認識結果格納部421に格納されている画像データに対して極座標変換処理を実施する第2画像変換部451と、第2画像変換部451の処理結果である第3画像データ格納部453とを有する。なお、設備角度算出部423の処理内容も、第1の実施の形態とは異なる。
【0046】
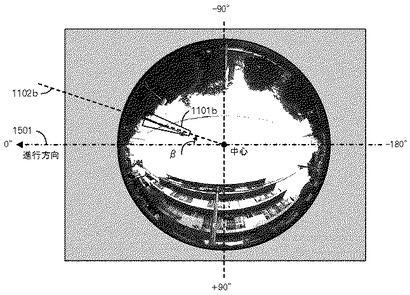
以下、異なる部分についてのみ説明する。第2画像変換部451は、画像変換部411の逆処理である極座標変換を実施する。すなわち、画像認識部415による認識結果であるマークである太線枠1101及び中心線1102を含む画像データを、元の画像データに戻す。例えば、図10に示したような画像データを、図16に示すような画像データに変換する。図16に示すように、太線枠1101は、極座標変換で歪んだ形のマーク1101bに変形される。また、中心線1102は、底辺及び上辺に対して垂直な直線であるから、図16のような画像の中心を通過する直線1102bに変換される。
【0047】
その後、設備角度算出部423は、図16に示すような画像における進行方向を表す直線1501と直線1102bとの角度βを算出する。図16に示すような画像であれば、反時計回りで角度が設定されているので、進行方向を表す直線より上方の直線に対する角度の場合には負の変位角が算出され、進行方向を表す直線より下方の直線に対する角度の場合には正の変位角が算出される。図16の例で、β=−30度であると算出された場合には、進行方向の方位角278度から248度(=278−30)が算出される。以下の処理については、第1の実施の形態と同じである。
【0048】
このように第2画像変換部451を設けて元の画像データに戻すことによって、電柱や鉄塔につながっている電線を識別しやすくなるという効果がある。図10のような画像では、電柱や鉄塔については認識しやすくなるが、電線は逆に歪んでしまって認識しにくくなっている。これに対して、電柱や鉄塔を認識した上で、図16に示すように元の画像に戻せば、電柱や鉄塔が分かっているという点を用いて、歪みが小さくなっている電線を特定することが容易になるという効果がある。
【0049】
[実施の形態3]
本実施の形態では、第1及び第2の実施の形態とは異なるカメラ200を用いる。本実施の形態におけるカメラ200は、魚眼レンズではなく、複数のカメラによって撮影を行うカメラであって、図9のような画像を合成するカメラである。このようなカメラの場合、撮影された画像では、上辺又は底辺上の距離が撮影点から見込む角度にほぼ比例する画像が得られる。すなわち、角度演算に多少誤差が含まれることになる。また、360度回転して撮影を行うようなカメラを採用する場合もある。なお、図9のような画像において、進行方向を示す直線又は点が特定されているものとする。
【0050】
また、画像データ格納処理部313は、図9のような画像に対応付けて図5に示したデータを格納する。
【0051】
そして、本実施の形態における解析装置500は、図17に示すような構成を有する。なお、図6と同じ機能を果たす又は同様なデータを保持する要素については同じ参照符号を付与している。すなわち、解析装置500は、(A)画像データ格納部315と、(B)認識ルールデータ格納部419と、(C)認識ルールデータ格納部419に格納される認識ルールを生成する画像学習部417と、(D)認識ルールデータ格納部419に格納されている認識ルールデータを用いて画像データ格納部315に格納されている画像データに対して画像認識処理を実施する画像認識部415と、(E)画像認識部415の処理結果を格納する認識結果格納部421と、(F)認識結果格納部421に格納されているデータを用いて処理を行う設備角度算出部423と、(G)設備角度算出部423の処理結果を格納する設備角度格納部425と、(H)各設備について位置データを格納する設備位置DB429と、(I)設備角度格納部425及び認識結果格納部421と設備位置DB429とに格納されているデータと用いて設備識別処理を実施する設備識別部427と、(J)設備識別部427による処理結果を格納する識別結果格納部431と、(K)識別結果格納部431に格納されているデータを出力する出力部433とを有する。
【0052】
このように解析装置400の一部の構成要素を除去した構成になっている。
【0053】
次に、図18を用いて解析装置400の処理を説明する。まず、画像認識部415は、画像データ格納部315に格納されている画像のうち未処理の画像を特定する(ステップS41)。そして、画像認識部415は、認識ルールデータ格納部419に格納されている認識ルールに従って、画像データ格納部315に格納されている画像について、識別対象設備(認識対象設備であるが、識別対象設備と同じであり、電柱及び鉄塔など)の認識処理を実施し、処理結果として認識された設備を含むマークを含む画像データを画像データ格納部315に格納されている撮影位置データ及び進行方向データと共に認識結果格納部421に格納する(ステップS43)。このステップは、ステップS15と同じ処理である。第1の実施の形態と同様に、例えば図9に示した画像では、図10において太線枠1101で示すように、電柱を認識する。
【0054】
そして、設備角度算出部423及び設備識別部427は、認識結果格納部421及び設備位置DB429に格納されているデータを用いて、設備識別処理を実施する(ステップS45)。この設備識別処理については、図11乃至図15を用いて説明された処理と同様である。
【0055】
その後、画像認識部415は、画像データ格納部315に格納されている全ての画像について処理したか判断する(ステップS47)。未処理の画像が存在していれば、ステップS41に戻る。一方、全ての画像について処理した場合には、出力部433は、識別結果格納部431に格納されている処理結果である画像データ及び設備名を、表示装置や印刷装置などの出力装置に出力する(ステップS49)。例えば、ユーザからの指示に応じて、要求されたデータのみを出力するようにしても良い。
【0056】
以上のような処理を実施すれば、上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された画像があれば、電柱や鉄塔といった細長い設備を適切に識別することができるようになる。
【0057】
以上本技術の実施の形態を説明したが、本技術はこれに限定されるものではない。例えば、車両100で移動しながら撮影するような例を示したが、車両100以外の方法で移動しつつ撮影するようにしても良い。また、測定装置及び解析装置の機能ブロック図は一例であって、必ずしも実際のプログラムモジュール構成と一致しない場合もある。
【0058】
さらに、処理フローについても処理結果が変わらない限りにおいて処理ステップの順番を入れ替えたり、並列実行するようにしても良い。
【0059】
また、測定装置と解析装置が別装置の例を示しているが、1台の装置で上で述べた機能を全て実施するようにしても良いし、さらに多くの装置にて全ての機能を実現するようにしても良い。さらに、上でも述べたように電線など関連する設備などを併せて識別するようにしても良い。また、所定時間経過後に同一設備について画像データを取得し、予め定められた観点において比較するような処理を行うようにしても良い。
【0060】
なお、測定装置及び解析装置はコンピュータ装置であって、図19に示すように当該コンピュータ装置においては、メモリ2501(記憶部)とCPU2503(処理部)とハードディスク・ドライブ(HDD)2505と表示装置2509に接続される表示制御部2507とリムーバブル・ディスク2511用のドライブ装置2513と入力装置2515とネットワークに接続するための通信制御部2517とがバス2519で接続されている。オペレーティング・システム(OS)及びWebブラウザを含むアプリケーション・プログラムは、HDD2505に格納されており、CPU2503により実行される際にはHDD2505からメモリ2501に読み出される。必要に応じてCPU2503は、表示制御部2507、通信制御部2517、ドライブ装置2513を制御して、必要な動作を行わせる。また、処理途中のデータについては、メモリ2501に格納され、必要があればHDD2505に格納される。このようなコンピュータは、上で述べたCPU2503、メモリ2501などのハードウエアとOS及び必要なアプリケーション・プログラムとが有機的に協働することにより、上で述べたような各種機能を実現する。
【符号の説明】
【0061】
200 カメラ
311 GPS装置 313 画像データ格納処理部
315 画像データ格納部
411 画像変換部 413 第2画像データ格納部
415 画像認識部 417 画像学習部
419 認識ルールデータ格納部 421 認識結果格納部
423 設備角度算出部 425 設備角度格納部
427 設備識別部 429 設備位置DB
431 識別結果格納部 433 出力部
451 第2画像変換部 453 第3画像データ格納部
【技術分野】
【0001】
本発明は、画像において電柱や鉄塔などの設備を識別するための技術に関する。
【背景技術】
【0002】
例えば特開2001−273481号公報には、架空配線された電柱を簡便に作業性よく写真撮影し、これを規格化し、一元的に管理するための技術が開示されている。より具体的には、電柱を広角の3次元像の魚眼像として撮像し、魚眼像の情報を2次元映像の情報に変換し、2次元映像の情報をビジュアル画像に変換して記録もしくは表示し、又は、ビジュアル画像をさらにデジタル情報に変換して記録もしくは表示し、電柱の全景・設置環境を確認する。しかし、カメラの方向が異なると共に、走行している車両からの画像を処理するものではない。
【0003】
また、特開2002−357557号公報には、道路や周辺施設等のチェックするにあたり作業者の労力負担を軽減することのできる、道路や周辺施設等の管理システムが開示されている。具体的には、巡回車に搭載された撮影カメラにより取得された道路や周辺施設等の映像データを記録するデータ記録部と、映像データを画像処理することにより、道路や周辺施設等の異常を検出する画像処理部と、第1の日付の撮影により取得された第1映像データと比較すべき映像データを、第1の日付とは異なる第2の日付の撮影により取得された第2映像データ群から特定する映像データ特定部とを備える。そして、画像処理部は、第1映像データと第2映像データとを画像処理技術を用いて比較対照することにより、道路や周辺施設等の異常を検出するものである。撮影された設備が地図上のどの設備であるかを識別するようなことは考慮されていない。
【0004】
さらに、特開平10−294932号公報には、巡視作業等で撮影する位置が事前に指定されている場所での撮影を自動的に行うデジタル画像撮影装置が開示されている。具体的には、撮影予定場所の一覧を格納したデータベースと、現在位置を計測するDGPS(Differential Global Positioning System)と、データベースとDGPSの位置情報からデータベースに記録されている位置の範囲内に入ったことを識別する手段と、デジタル的に画像を撮影する手段と、撮影された画像を記録する手段とを備える。そして、撮影場所の範囲内に入ったと判断された場合に撮影手段で撮影した画像を記録手段に記録する。これによれば、巡視箇所の撮影を自動化することが可能となる。また、撮影の位置が正確に分かっていなくても、機器や地点の名称で指定することにより撮影場所の設定を行うことが可能となる。しかしながら、画像から、特定の設備を識別するような技術が開示されているわけではない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−273481号公報
【特許文献2】特開2002−357557号公報
【特許文献3】特開平10−294932号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
道路や道路周辺に設置された電柱や鉄塔などの設備を1つ1つ人が巡回するのは非常にコストがかかるため、このコストを下げるために自動車を走行中に設備の画像を撮影することが考えられる。しかしながら、撮影された設備が、管理しているどの設備であるかを自動的に識別するような技術は従来存在していない。
【0007】
従って、本発明の目的は、撮影された電柱や鉄塔などの設備を識別するための新規な技術を提供することである。
【課題を解決するための手段】
【0008】
本発明の設備識別方法は、(A)上辺又は底辺に垂直な基準線又は基準点が特定されており且つ上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された第1画像と当該撮影点の撮影位置データと基準線又は基準点の方位角とを格納する第1画像データ格納部に格納されている第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出するステップと、(B)抽出された画像部分を通る直線と基準線又は基準点を通り上辺又は底辺に垂直な直線との関係から画像部分の変位角を算出すると共に、当該変位角と第1画像データ格納部に格納されている基準線又は基準点の方位角とにより、画像部分の方位角を算出する方位角算出ステップと、(C)第1画像データ格納部に格納されている撮影点の撮影位置データと算出された画像部分の方位角とから特定される範囲に含まれる識別対象設備のうち最も撮影点に近い識別対象設備の識別子を、識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出するステップとを含む。
【0009】
このようにすれば、カメラが設置された車両が走行しながら撮影された画像であっても、電柱や鉄塔などの比較的細い設備でも適切に識別できるようになる。
【0010】
また、上で述べた方位角算出ステップが、基準線又は基準点を通り上辺又は底辺に垂直な直線から、抽出された画像部分を通る直線までの距離から画像部分の変位角を算出するステップと、変位角と方位角との和により、画像部分の方位角を算出するステップとを含むようにしても良い。第1画像の定義より、距離が分かれば角度が判明するため、設備の方位角が得られるようになる。
【0011】
さらに、上記設備識別方法は、天頂に向けた魚眼レンズで撮影され且つ第2画像データ格納部に格納されている第2画像に対して極座標逆変換により第1画像を生成し、第1画像データ格納部に格納するステップをさらに含むようにしても良い。このようにすれば、安価に第1画像を得ることができるようになる。
【0012】
なお、上で述べた方位角算出ステップが、第1画像に対して極座標変換により第3画像を生成するステップと、第3画像において画像部分に相当する部分を通る直線と基準線又は基準点を通り上辺又は底辺に垂直な直線に相当する第2の直線とがなす角度を、画像部分の変位角として算出するステップとを含むようにしてもよい。このような極座標変換を実施することによって、例えば電線などを認識するような後続の処理もやりやすくなる。
【0013】
なお、上で述べたような処理をハードウエアに実施させるためのプログラムを作成することができ、当該プログラムは、例えばフレキシブル・ディスク、CD−ROM、光磁気ディスク、半導体メモリ、ハードディスク等のコンピュータ読み取り可能な記憶媒体又は記憶装置に格納される。なお、処理途中のデータについては、コンピュータのメモリ等の記憶装置に一時保管される。
【発明の効果】
【0014】
本発明によれば、撮影された設備を適切に識別することができるようになる。
【図面の簡単な説明】
【0015】
【図1】図1は、撮影の様子を示す模式図である。
【図2】図2は、測定装置の機能ブロック図である。
【図3】図3は、測定処理の処理フローを示す図である。
【図4】図4は、第1の実施の形態において撮影される画像の一例を示す図である。
【図5】図5は、撮影された画像と共に格納されるデータの一例を示す図である。
【図6】図6は、第1の実施の形態における解析装置の機能ブロック図である。
【図7】図7は、第1の実施の形態における解析処理の処理フローを示す図である。
【図8】図8は、極座標逆変換について説明するための図である。
【図9】図9は、極座標逆変換について説明するための図である。
【図10】図10は、画像認識処理について説明するための図である。
【図11】図11は、設備識別処理の処理フローを示す図である。
【図12】図12は、認識された設備と進行方向との変位角を算出する処理を説明するための図である。
【図13】図13は、設備識別のための処理を説明するための図である。
【図14】図14は、設備位置DBに格納されるデータの一例を示す図である。
【図15】図15は、識別結果格納部に格納されるデータの一例を示す図である。
【図16】図16は、極座標変換後の処理について説明するための図である。
【図17】図17は、第3の実施の形態における解析装置の機能ブロック図である。
【図18】図18は、第3の実施の形態における解析処理の処理フローを示す図である。
【図19】図19は、コンピュータの機能ブロック図である。
【発明を実施するための最良の形態】
【0016】
[実施の形態1]
本実施の形態では、図1に示すように、車両100にカメラ200を搭載し、この車両100が道路を走行して、カメラ200により所定間隔で撮影を行うものとする。以下でも述べるように、車両100には、測定装置300も搭載されており、当該測定装置300に含まれるGPS(Global Positioning System)装置の測定間隔に応じて所定間隔が決定される。また、本実施の形態では、カメラ200には、魚眼レンズが用いられており、魚眼レンズを天頂に向けた形で設置する。
【0017】
図2に車両100に搭載される測定装置300の機能ブロック図を示す。測定装置300は、GPS装置311と、画像データ格納処理部313と、画像データ格納部315とを有する。画像データ格納処理部313は、所定間隔でカメラ200に画像の撮影を実施させ、当該カメラ200で撮影された画像の画像データとGPS装置311において測定された撮影位置データ等とを対応付けて画像データ格納部315に格納する。
【0018】
図3に測定装置300の処理フローを示す。画像データ格納処理部313は、撮影時刻になるまで待機し(ステップS1)、所定時間経過して撮影時刻になると、カメラ200に対して指示を行う。カメラ200は、画像データ格納処理部313からの指示に応じて撮影を行い(ステップS3)、撮影した画像の画像データを画像データ格納処理部313に出力する。画像データ格納処理部313は、カメラ200からの画像データを、GPS装置311によって測定された、画像撮影時刻の撮影位置データ及び進行方向データと共に、画像データ格納部315に格納する(ステップS5)。このような処理を、処理終了を指示されるまで繰り返す(ステップS7)。
【0019】
なお、進行方向データは、方位角であり、例えば直前に測定された位置と今回測定された位置とを結ぶ直線から、その方位角を算出する。
【0020】
画像データ格納部315に格納されるデータの一例を図4及び図5に示す。図4に、本実施の形態において魚眼レンズを伴うカメラ200で撮影された画像の一例を示す。図4のように、本実施の形態では、円形の画像部分の中心が天頂を向くように調整されており、車両100への設置態様によって、予め画像内の進行方向を特定しておく。本実施の形態では、図4の画像において水平左方向が進行方向であるものとする。
【0021】
また、画像データ格納部315には、図5のようなデータが、画像データ毎に対応付けられて格納される。すなわち、撮影位置データとして緯度経度と、進行方向である方位角とが格納される。緯度経度ではなく、X座標値及びY座標値を算出した上で、格納しても良い。画像データ格納部315に格納されたデータは、以下で述べる解析処理に用いられる。
【0022】
次に、画像データ格納部315に格納されたデータを用いて、画像中の特定の設備(本実施の形態では電柱及び鉄塔)を識別する処理を行う解析装置400を説明する。図6に、解析装置400の機能ブロック図を示す。解析装置400は、(A)画像データ格納部315と、(B)画像データ格納部315に格納されている画像データに対して極座標逆変換処理を実施する画像変換部411と、(C)画像変換部411の処理結果を格納する第2画像データ格納部413と、(D)認識ルールデータ格納部419と、(E)認識ルールデータ格納部419に格納される認識ルールを生成する画像学習部417と、(F)認識ルールデータ格納部419に格納されている認識ルールデータを用いて第2画像データ格納部413に格納されている画像データに対して画像認識処理を実施する画像認識部415と、(G)画像認識部415の処理結果を格納する認識結果格納部421と、(H)認識結果格納部421に格納されているデータを用いて処理を行う設備角度算出部423と、(I)設備角度算出部423の処理結果を格納する設備角度格納部425と、(J)各設備について位置データを格納する設備位置データベース(DB)429と、(K)設備角度格納部425及び認識結果格納部421と設備位置DB429とに格納されているデータと用いて設備識別処理を実施する設備識別部427と、(L)設備識別部427による処理結果を格納する識別結果格納部431と、(M)識別結果格納部431に格納されているデータを出力する出力部433とを有する。
【0023】
次に、解析装置400の処理内容を図7乃至図15を用いて説明する。まず、画像変換部411は、画像データ格納部315に格納されている画像のうち未処理の画像を特定する(図7:ステップS11)。そして、画像変換部411は、特定された画像について、極座標逆変換処理を実施し、処理後の画像データ及び画像データに対応付けられているデータ(撮影位置データ及び進行方向データ)を第2画像データ格納部413に格納する(ステップS13)。
【0024】
ステップS13については図8を用いて説明する。なお、円形の画像部分の中心位(Cx,Cy)を特定しておく。さらに、円形の画像部分の半径rも特定しておく。
【0025】
さらに、カメラ200を車両100に設置する場合には、以下の演算が簡単になるように、進行方向が画像上の0度、90度など分かりやすい位置になるように調整しておく。なお、本実施の形態では0度が進行方向である。また、図8では、水平方向右が−180度であり、反時計回りに角度が設定されているものとする。
【0026】
このような前提の下、以下の演算を行う。
(1)極座標逆変換後の画像として、幅2πr[画素]、高さr[画素]の矩形の画像を用意する。
(2)極座標逆変換後の画像における水平軸の座標に相当する変数xを、−πrからπrまで、1刻みで変化させながら以下の演算を繰り返す。
(ア)角度変数angle=x*(360/(2πr))(以下、(1)式と呼ぶ。)を算出し、画像の中心からangle度の方向に長さrの線分を引く。図8では、矢印1001乃至1003のような長さrの線分を設定する。
(イ)線分に沿って矢印方向に距離1[画素]毎に画素値を読み取り、極座標逆変換後の画像において左端からxの位置に、読み取った画素値を上から下に垂直に描画する。
【0027】
そうすると、例えば図9に示すような画像が生成される。図9の例では、左端が−180度、右端が179度、中心部(本実施の形態では進行方向)が0度となっており、高さはrである。そして、図9に示すように、図8に示された矢印1001乃至1003は、同じ参照番号が付されている鉛直方向矢印にマッピングされる。このように、この矩形の画像の上辺は図8の画像の中心に対応している。また、上で述べた(ア)及び(イ)の処理により、この矩形の画像の底辺(本例では上辺でも同じ)の長さ(距離とも呼ぶ)が、撮影位置(撮影点とも呼ぶ)から見込む角度に比例するようになっている。すなわち、距離が分かれば角度が分かるようになっている。距離と角度の関係は(1)式のとおりであり、距離が分かれば角度も分かるようになる。また、進行方向は0度であるから、図9では上辺及び底辺に垂直な直線で表されるが、この直線上のいずれかの点を進行方向を表す点として特定するようにしても良い。なお、このような極座標逆変換の演算はよく知られており、これ以上述べない。
【0028】
図8のような画像を得るには比較的安価な魚眼レンズを用いることができるが、図8のような画像では、電柱や鉄塔の方向が一定とならないために電柱や鉄塔を認識することは困難である。従って、図9のような画像に変換すれば、電柱や鉄塔の方向が一定となるため、比較的容易に認識することができる。
【0029】
次に、画像認識部415は、認識ルールデータ格納部419に格納されている認識ルールに従って、第2画像データ格納部413に格納されている極座標逆変換後の画像について、識別対象設備(認識対象設備であるが、識別対象設備と同じであり、電柱及び鉄塔など)の認識処理を実施し、処理結果として認識された設備を示すマークを含む画像データを第2画像データ格納部413に格納されている撮影位置データ及び進行方向データと共に認識結果格納部421に格納する(ステップS15)。
【0030】
この認識処理自体はよく知られた技術であり、多数の電柱や鉄塔の画像を画像学習部417に入力し、これに対してよく知られた学習アルゴリズムによって画像学習部417は学習を行って認識ルールを生成し、認識ルールのデータを認識ルールデータ格納部419に格納しておく。その後必要なタイミングで、画像認識部415は、認識ルールデータ格納部419に格納されている認識ルールに従って画像認識処理を実施する。
【0031】
例えば、図9に示した画像では、図10において太線枠1101で示すように、電柱が認識される。太線枠1101は、マークである。
【0032】
そして、設備角度算出部423及び設備識別部427は、認識結果格納部421及び設備位置DB429に格納されているデータを用いて、設備識別処理を実施する(ステップS17)。設備識別処理については、図11乃至図15を用いて説明する。
【0033】
まず、設備角度算出部423は、認識結果格納部421に格納されているデータのうち未処理の認識結果を特定する(図11:ステップS21)。そして、特定された認識結果から、識別対象設備の方位角を算出し、設備角度格納部425に格納する(ステップS22)。まず、進行方向を表す直線1111(図12)から、ステップS15で認識された設備を含む矩形1101(図10)の中心線1102までの距離dを算出する。なお、図12の例では、中央から左の角度が負、右の角度が正となっているので、直線1111から左側に中心線1102が含まれる場合には距離dは負の値となり、直線1111から右側に中心線1102が含まれる場合には距離dは正の値となる。図12の例では、中心線1102は直線1111より左側にあるので、距離dは負の値となる。
【0034】
そして、上で述べた(1)式に従って、距離dから変位角angleを算出する。例えば、変位角(−30度)が算出されたものとする。そして、認識結果格納部421に格納されている進行方向データである方位角と、算出された変位角との和により、識別すべき設備の方位角を算出する。図5に示すように進行方向データである方位角が278度であるから、設備の方位角は248度(=278−30)と算出される。
【0035】
次に、設備識別部427は、認識結果格納部421に格納されている撮影位置データを読み出し、設備位置DB429に登録されている設備(電柱及び鉄塔など)のうち撮影位置から、予め定められている半径Rの設備の設備名を抽出する(ステップS23)。図13に一例を示す。点1203が撮影位置であり、この点1203を中心とする半径Rの範囲に含まれる設備を抽出する。なお、図13において黒丸が電柱を表しており、図13に示している電柱が抽出される。また、図14に、設備位置DB429に格納されるデータの一例を示す。図14の例では、設備名(235号柱など)と、当該設備の緯度経度で表される位置データとが格納されている。本ステップの処理については、緯度経度の値をX座標値及びY座標値に変換してから行うようにしても良い。
【0036】
そして、設備識別部427は、ステップS23において抽出された設備のうち、ステップS22で算出された方位角で特定される方向1202を中心とする所定角αに入る設備に絞り込む(ステップS25)。図13の例では、電柱1211に絞り込まれる。すなわち、電柱1211の設備名を特定し、例えばメインメモリなどの記憶装置に格納する。
【0037】
その後、設備識別部427は、ステップS25で絞り込まれて残った設備の数が「0」であるか判断する(ステップS27)。残った設備の数が「0」であれば、該当設備がないということなので、設備識別部427は、「該当なし」を表すデータを、認識結果格納部421に格納されている画像データのうちマーク内の画像データと共に識別結果格納部431に格納する(ステップS29)。そして、元の処理に戻る。
【0038】
一方、残った設備の数が「0」ではない場合、設備識別部427は、残った設備の数が「1」であるか判断する(ステップS31)。残った設備の数が「1」であれば、設備識別部427は、残った設備の設備名及び認識結果格納部421に格納されている画像データのうちマーク内の画像データを識別結果格納部431に格納する(ステップS33)。そして、元の処理に戻る。
【0039】
さらに、残った設備の数が「1」ではない場合、設備識別部427は、ステップS25で絞り込まれて残った設備のうち、最も撮影位置に近い設備の設備名及び認識結果格納部421に格納されている画像データのうち当該設備についてのマーク内の画像データを識別結果格納部431に格納する(ステップS35)。そして、元の処理に戻る。
【0040】
識別結果格納部431には、例えば図15に示すようなデータが格納される。すなわち、識別された設備の設備名(例えば236号柱)と当該設備の画像データとが対応付けて格納される。
【0041】
設備識別部427は、認識結果格納部421に格納されている全ての認識結果について処理したか判断する(ステップS37)。未処理の認識結果が存在していれば、ステップS21に戻る。一方、全ての認識結果について処理した場合には、元の処理に戻る。
【0042】
図7の説明に戻って、画像変換部411は、画像データ格納部315に格納されている全ての画像について処理したか判断する(ステップS19)。未処理の画像が存在していれば、ステップS11に戻る。一方、全ての画像について処理した場合には、出力部433は、識別結果格納部431に格納されている処理結果である画像データ及び設備名を、表示装置や印刷装置などの出力装置に出力する(ステップS20)。例えば、ユーザからの指示に応じて、要求されたデータのみを出力するようにしても良い。
【0043】
以上のような処理を実施すれば、電柱や鉄塔といった細長い設備についても、安価なカメラにて識別することができるようになる。
【0044】
[実施の形態2]
第1の実施の形態の解析装置400は、例えば図6の点線の構成を含むような形に変形することも可能である。
【0045】
すなわち、解析装置400は、さらに、認識結果格納部421に格納されている画像データに対して極座標変換処理を実施する第2画像変換部451と、第2画像変換部451の処理結果である第3画像データ格納部453とを有する。なお、設備角度算出部423の処理内容も、第1の実施の形態とは異なる。
【0046】
以下、異なる部分についてのみ説明する。第2画像変換部451は、画像変換部411の逆処理である極座標変換を実施する。すなわち、画像認識部415による認識結果であるマークである太線枠1101及び中心線1102を含む画像データを、元の画像データに戻す。例えば、図10に示したような画像データを、図16に示すような画像データに変換する。図16に示すように、太線枠1101は、極座標変換で歪んだ形のマーク1101bに変形される。また、中心線1102は、底辺及び上辺に対して垂直な直線であるから、図16のような画像の中心を通過する直線1102bに変換される。
【0047】
その後、設備角度算出部423は、図16に示すような画像における進行方向を表す直線1501と直線1102bとの角度βを算出する。図16に示すような画像であれば、反時計回りで角度が設定されているので、進行方向を表す直線より上方の直線に対する角度の場合には負の変位角が算出され、進行方向を表す直線より下方の直線に対する角度の場合には正の変位角が算出される。図16の例で、β=−30度であると算出された場合には、進行方向の方位角278度から248度(=278−30)が算出される。以下の処理については、第1の実施の形態と同じである。
【0048】
このように第2画像変換部451を設けて元の画像データに戻すことによって、電柱や鉄塔につながっている電線を識別しやすくなるという効果がある。図10のような画像では、電柱や鉄塔については認識しやすくなるが、電線は逆に歪んでしまって認識しにくくなっている。これに対して、電柱や鉄塔を認識した上で、図16に示すように元の画像に戻せば、電柱や鉄塔が分かっているという点を用いて、歪みが小さくなっている電線を特定することが容易になるという効果がある。
【0049】
[実施の形態3]
本実施の形態では、第1及び第2の実施の形態とは異なるカメラ200を用いる。本実施の形態におけるカメラ200は、魚眼レンズではなく、複数のカメラによって撮影を行うカメラであって、図9のような画像を合成するカメラである。このようなカメラの場合、撮影された画像では、上辺又は底辺上の距離が撮影点から見込む角度にほぼ比例する画像が得られる。すなわち、角度演算に多少誤差が含まれることになる。また、360度回転して撮影を行うようなカメラを採用する場合もある。なお、図9のような画像において、進行方向を示す直線又は点が特定されているものとする。
【0050】
また、画像データ格納処理部313は、図9のような画像に対応付けて図5に示したデータを格納する。
【0051】
そして、本実施の形態における解析装置500は、図17に示すような構成を有する。なお、図6と同じ機能を果たす又は同様なデータを保持する要素については同じ参照符号を付与している。すなわち、解析装置500は、(A)画像データ格納部315と、(B)認識ルールデータ格納部419と、(C)認識ルールデータ格納部419に格納される認識ルールを生成する画像学習部417と、(D)認識ルールデータ格納部419に格納されている認識ルールデータを用いて画像データ格納部315に格納されている画像データに対して画像認識処理を実施する画像認識部415と、(E)画像認識部415の処理結果を格納する認識結果格納部421と、(F)認識結果格納部421に格納されているデータを用いて処理を行う設備角度算出部423と、(G)設備角度算出部423の処理結果を格納する設備角度格納部425と、(H)各設備について位置データを格納する設備位置DB429と、(I)設備角度格納部425及び認識結果格納部421と設備位置DB429とに格納されているデータと用いて設備識別処理を実施する設備識別部427と、(J)設備識別部427による処理結果を格納する識別結果格納部431と、(K)識別結果格納部431に格納されているデータを出力する出力部433とを有する。
【0052】
このように解析装置400の一部の構成要素を除去した構成になっている。
【0053】
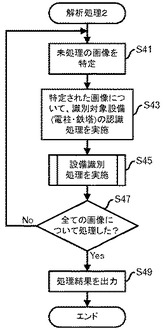
次に、図18を用いて解析装置400の処理を説明する。まず、画像認識部415は、画像データ格納部315に格納されている画像のうち未処理の画像を特定する(ステップS41)。そして、画像認識部415は、認識ルールデータ格納部419に格納されている認識ルールに従って、画像データ格納部315に格納されている画像について、識別対象設備(認識対象設備であるが、識別対象設備と同じであり、電柱及び鉄塔など)の認識処理を実施し、処理結果として認識された設備を含むマークを含む画像データを画像データ格納部315に格納されている撮影位置データ及び進行方向データと共に認識結果格納部421に格納する(ステップS43)。このステップは、ステップS15と同じ処理である。第1の実施の形態と同様に、例えば図9に示した画像では、図10において太線枠1101で示すように、電柱を認識する。
【0054】
そして、設備角度算出部423及び設備識別部427は、認識結果格納部421及び設備位置DB429に格納されているデータを用いて、設備識別処理を実施する(ステップS45)。この設備識別処理については、図11乃至図15を用いて説明された処理と同様である。
【0055】
その後、画像認識部415は、画像データ格納部315に格納されている全ての画像について処理したか判断する(ステップS47)。未処理の画像が存在していれば、ステップS41に戻る。一方、全ての画像について処理した場合には、出力部433は、識別結果格納部431に格納されている処理結果である画像データ及び設備名を、表示装置や印刷装置などの出力装置に出力する(ステップS49)。例えば、ユーザからの指示に応じて、要求されたデータのみを出力するようにしても良い。
【0056】
以上のような処理を実施すれば、上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された画像があれば、電柱や鉄塔といった細長い設備を適切に識別することができるようになる。
【0057】
以上本技術の実施の形態を説明したが、本技術はこれに限定されるものではない。例えば、車両100で移動しながら撮影するような例を示したが、車両100以外の方法で移動しつつ撮影するようにしても良い。また、測定装置及び解析装置の機能ブロック図は一例であって、必ずしも実際のプログラムモジュール構成と一致しない場合もある。
【0058】
さらに、処理フローについても処理結果が変わらない限りにおいて処理ステップの順番を入れ替えたり、並列実行するようにしても良い。
【0059】
また、測定装置と解析装置が別装置の例を示しているが、1台の装置で上で述べた機能を全て実施するようにしても良いし、さらに多くの装置にて全ての機能を実現するようにしても良い。さらに、上でも述べたように電線など関連する設備などを併せて識別するようにしても良い。また、所定時間経過後に同一設備について画像データを取得し、予め定められた観点において比較するような処理を行うようにしても良い。
【0060】
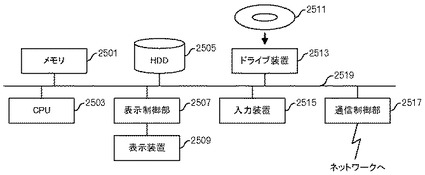
なお、測定装置及び解析装置はコンピュータ装置であって、図19に示すように当該コンピュータ装置においては、メモリ2501(記憶部)とCPU2503(処理部)とハードディスク・ドライブ(HDD)2505と表示装置2509に接続される表示制御部2507とリムーバブル・ディスク2511用のドライブ装置2513と入力装置2515とネットワークに接続するための通信制御部2517とがバス2519で接続されている。オペレーティング・システム(OS)及びWebブラウザを含むアプリケーション・プログラムは、HDD2505に格納されており、CPU2503により実行される際にはHDD2505からメモリ2501に読み出される。必要に応じてCPU2503は、表示制御部2507、通信制御部2517、ドライブ装置2513を制御して、必要な動作を行わせる。また、処理途中のデータについては、メモリ2501に格納され、必要があればHDD2505に格納される。このようなコンピュータは、上で述べたCPU2503、メモリ2501などのハードウエアとOS及び必要なアプリケーション・プログラムとが有機的に協働することにより、上で述べたような各種機能を実現する。
【符号の説明】
【0061】
200 カメラ
311 GPS装置 313 画像データ格納処理部
315 画像データ格納部
411 画像変換部 413 第2画像データ格納部
415 画像認識部 417 画像学習部
419 認識ルールデータ格納部 421 認識結果格納部
423 設備角度算出部 425 設備角度格納部
427 設備識別部 429 設備位置DB
431 識別結果格納部 433 出力部
451 第2画像変換部 453 第3画像データ格納部
【特許請求の範囲】
【請求項1】
上辺又は底辺に垂直な基準線又は基準点が特定されており且つ前記上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された第1画像と当該撮影点の撮影位置データと前記基準線又は前記基準点の方位角とを格納する第1画像データ格納部に格納されている前記第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出するステップと、
抽出された前記画像部分を通る直線と前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線との関係から前記画像部分の変位角を算出すると共に、当該変位角と前記第1画像データ格納部に格納されている前記基準線又は前記基準点の方位角とにより、前記画像部分の方位角を算出する方位角算出ステップと、
前記第1画像データ格納部に格納されている前記撮影点の撮影位置データと算出された前記画像部分の方位角とから特定される範囲に含まれる前記識別対象設備のうち最も前記撮影点に近い識別対象設備の識別子を、前記識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出するステップと、
を、コンピュータに実行させるためプログラム。
【請求項2】
前記方位角算出ステップが、
前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線から、抽出された前記画像部分を通る直線までの距離から前記画像部分の変位角を算出するステップと、
前記変位角と前記方位角との和により、前記画像部分の方位角を算出するステップと、
を含む請求項1記載のプログラム。
【請求項3】
天頂に向けた魚眼レンズで撮影され且つ第2画像データ格納部に格納されている第2画像に対して極座標逆変換により前記第1画像を生成し、前記第1画像データ格納部に格納するステップ
をさらに前記コンピュータに実行させるための請求項1又は2記載のプログラム。
【請求項4】
前記方位角算出ステップが、
前記第1画像に対して極座標変換により第3画像を生成するステップと、
前記第3画像において前記画像部分に相当する部分を通る直線と前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線に相当する第2の直線とがなす角度を、前記画像部分の変位角として算出するステップと、
を含む請求項1又は3記載のプログラム。
【請求項5】
上辺又は底辺に垂直な基準線又は基準点が特定されており且つ前記上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された第1画像と当該撮影点の撮影位置データと前記基準線又は前記基準点の方位角とを格納する第1画像データ格納部に格納されている前記第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出するステップと、
抽出された前記画像部分を通る直線と前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線との関係から前記画像部分の変位角を算出すると共に、当該変位角と前記第1画像データ格納部に格納されている前記基準線又は前記基準点の方位角とにより、前記画像部分の方位角を算出する方位角算出ステップと、
前記第1画像データ格納部に格納されている前記撮影点の撮影位置データと算出された前記画像部分の方位角とから特定される範囲に含まれる前記識別対象設備のうち最も前記撮影点に近い識別対象設備の識別子を、前記識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出するステップと、
を含み、コンピュータにより実行される設備識別方法。
【請求項6】
上辺又は底辺に垂直な基準線又は基準点が特定されており且つ前記上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された第1画像と当該撮影点の撮影位置データと前記基準線又は前記基準点の方位角とを格納する第1画像データ格納部に格納されている前記第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出する手段と、
抽出された前記画像部分を通る直線と前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線との関係から前記画像部分の変位角を算出すると共に、当該変位角と前記第1画像データ格納部に格納されている前記基準線又は前記基準点の方位角とにより、前記画像部分の方位角を算出する手段と、
前記第1画像データ格納部に格納されている前記撮影点の撮影位置データと算出された前記画像部分の方位角とから特定される範囲に含まれる前記識別対象設備のうち最も前記撮影点に近い識別対象設備の識別子を、前記識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出する手段と、
を有する設備識別装置。
【請求項1】
上辺又は底辺に垂直な基準線又は基準点が特定されており且つ前記上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された第1画像と当該撮影点の撮影位置データと前記基準線又は前記基準点の方位角とを格納する第1画像データ格納部に格納されている前記第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出するステップと、
抽出された前記画像部分を通る直線と前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線との関係から前記画像部分の変位角を算出すると共に、当該変位角と前記第1画像データ格納部に格納されている前記基準線又は前記基準点の方位角とにより、前記画像部分の方位角を算出する方位角算出ステップと、
前記第1画像データ格納部に格納されている前記撮影点の撮影位置データと算出された前記画像部分の方位角とから特定される範囲に含まれる前記識別対象設備のうち最も前記撮影点に近い識別対象設備の識別子を、前記識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出するステップと、
を、コンピュータに実行させるためプログラム。
【請求項2】
前記方位角算出ステップが、
前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線から、抽出された前記画像部分を通る直線までの距離から前記画像部分の変位角を算出するステップと、
前記変位角と前記方位角との和により、前記画像部分の方位角を算出するステップと、
を含む請求項1記載のプログラム。
【請求項3】
天頂に向けた魚眼レンズで撮影され且つ第2画像データ格納部に格納されている第2画像に対して極座標逆変換により前記第1画像を生成し、前記第1画像データ格納部に格納するステップ
をさらに前記コンピュータに実行させるための請求項1又は2記載のプログラム。
【請求項4】
前記方位角算出ステップが、
前記第1画像に対して極座標変換により第3画像を生成するステップと、
前記第3画像において前記画像部分に相当する部分を通る直線と前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線に相当する第2の直線とがなす角度を、前記画像部分の変位角として算出するステップと、
を含む請求項1又は3記載のプログラム。
【請求項5】
上辺又は底辺に垂直な基準線又は基準点が特定されており且つ前記上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された第1画像と当該撮影点の撮影位置データと前記基準線又は前記基準点の方位角とを格納する第1画像データ格納部に格納されている前記第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出するステップと、
抽出された前記画像部分を通る直線と前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線との関係から前記画像部分の変位角を算出すると共に、当該変位角と前記第1画像データ格納部に格納されている前記基準線又は前記基準点の方位角とにより、前記画像部分の方位角を算出する方位角算出ステップと、
前記第1画像データ格納部に格納されている前記撮影点の撮影位置データと算出された前記画像部分の方位角とから特定される範囲に含まれる前記識別対象設備のうち最も前記撮影点に近い識別対象設備の識別子を、前記識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出するステップと、
を含み、コンピュータにより実行される設備識別方法。
【請求項6】
上辺又は底辺に垂直な基準線又は基準点が特定されており且つ前記上辺又は底辺上の距離が撮影点から見込む角度に比例するように撮影された第1画像と当該撮影点の撮影位置データと前記基準線又は前記基準点の方位角とを格納する第1画像データ格納部に格納されている前記第1画像に対して、画像認識処理を実施し、電柱及び鉄塔を含む識別対象設備の画像部分を抽出する手段と、
抽出された前記画像部分を通る直線と前記基準線又は前記基準点を通り前記上辺又は底辺に垂直な直線との関係から前記画像部分の変位角を算出すると共に、当該変位角と前記第1画像データ格納部に格納されている前記基準線又は前記基準点の方位角とにより、前記画像部分の方位角を算出する手段と、
前記第1画像データ格納部に格納されている前記撮影点の撮影位置データと算出された前記画像部分の方位角とから特定される範囲に含まれる前記識別対象設備のうち最も前記撮影点に近い識別対象設備の識別子を、前記識別対象設備の識別子と位置データとが登録されている設備データ格納部から抽出する手段と、
を有する設備識別装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図19】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図8】
【図9】
【公開番号】特開2011−170400(P2011−170400A)
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願番号】特願2010−30864(P2010−30864)
【出願日】平成22年2月16日(2010.2.16)
【出願人】(000003687)東京電力株式会社 (2,580)
【Fターム(参考)】
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願日】平成22年2月16日(2010.2.16)
【出願人】(000003687)東京電力株式会社 (2,580)
【Fターム(参考)】
[ Back to top ]