
評価ベンチのブレーキトルク算出方法
【課題】トランスアクスルに備わるモータジェネレータが過回転になることなく任意の時間で停止させるためのダイナモのブレーキトルクを算出することができる評価ベンチのブレーキトルク算出方法を提供すること。
【解決手段】プラネタリギヤ25を介して接続されたモータジェネレータMG1,MG2を備えるトランスアクスル20の入力側及び出力側にそれぞれダイナモ12,14を接続し、各ダイナモ12,14によりモータジェネレータMG,MG2を回転させて性能評価を行う評価ベンチ10を停止させる際のブレーキトルクk1,k2を算出する方法において、プラネタリギヤ25に関する運動方程式に基づき、各ブレーキトルクk1,k2に関する伝達関数を導出して、ダイナモ12,14の各回転数と停止時間t1とから、ダイナモ12,14及びモータジェネレータMG1,MG2を停止時間t1で同時に停止させるための各ブレーキトルクk1,k2を算出する。
【解決手段】プラネタリギヤ25を介して接続されたモータジェネレータMG1,MG2を備えるトランスアクスル20の入力側及び出力側にそれぞれダイナモ12,14を接続し、各ダイナモ12,14によりモータジェネレータMG,MG2を回転させて性能評価を行う評価ベンチ10を停止させる際のブレーキトルクk1,k2を算出する方法において、プラネタリギヤ25に関する運動方程式に基づき、各ブレーキトルクk1,k2に関する伝達関数を導出して、ダイナモ12,14の各回転数と停止時間t1とから、ダイナモ12,14及びモータジェネレータMG1,MG2を停止時間t1で同時に停止させるための各ブレーキトルクk1,k2を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド車両に搭載されるトランスアクスルの性能評価を行う評価ベンチのブレーキトルク算出方法に関する。より詳細には、動力分割機構を介して接続された2つのモータを備える2モータ式ハイブリッド車両のトランスアクスルを評価する評価ベンチにおいて、評価ベンチを停止させる際のブレーキトルクを算出する方法に関するものである。
【背景技術】
【0002】
近年、電動機を駆動源として搭載したハイブリッド車両が普及してきた。このようなハイブリッド車両として、動力分割機構を介して接続された2つのモータジェネレータを備える2モータ式のトランスアクスル(ハイブリッドトランスアクスル)を備えたものがある。そして、ハイブリッドトランスアクスルは、実車評価だけでなく、評価ベンチにおいてトランスアクスル単体でも各種試験が実施されている。
【0003】
このような2モータ式のトランスアクスルを評価する評価ベンチ設備として、例えば特許文献1に、2モータ式のトランスアクスル出力性能検査装置が開示されている。この検査装置では、2モータ式のトランスアクスルをダイナモ(負荷モータ及びエンジン相当モータ)により回転させ、トランスアクスルの出力性能を検査している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−140668号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
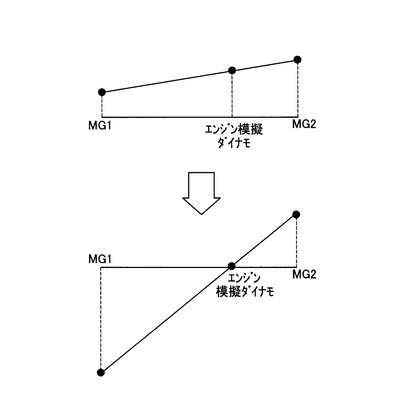
しかしながら、上記した装置では、評価ベンチの停止時に、ダイナモのブレーキトルクのかけ方により、検査対象トランスアクスルに備わるモータが過回転となってしまい、安全に停止させることができないおそれがあった。なぜなら、トランスアクスルに動力分割機構が設けられているため、図8に示すように、エンジン模擬ダイナモ(エンジン相当モータ)、出力吸収ダイナモ(負荷モータ)を停止する順番により、モータジェネレータMG1が過回転となってしまうのである。
【0006】
そこで、本発明は上記した問題点を解決するためになされたものであり、評価ベンチの停止時に、ハイブリッドトランスアクスルに備わるモータジェネレータが過回転になることなく任意の時間で停止させるためのダイナモのブレーキトルクを算出することができる評価ベンチのブレーキトルク算出方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するためになされた本発明の一態様は、プラネタリギヤを介して接続された2つのモータジェネレータを備える2モータ式ハイブリッドトランスアクスルの入力側及び出力側にそれぞれダイナモを接続し、ぞれぞれのダイナモにより前記2つのモータジェネレータを回転させて性能評価を行う評価ベンチを停止させる際のブレーキトルクを算出する評価ベンチのブレーキトルク算出方法において、前記プラネタリギヤに関する運動方程式に基づき、前記入出力ダイナモの各ブレーキトルクに関する伝達関数を導出して、前記入出力ダイナモの各回転数と停止希望時間とから、前記入出力ダイナモ及び前記2つのモータジェネレータを前記停止希望時間で同時に停止させるための前記入出力ダイナモの各ブレーキトルクを算出することを特徴とする。
【0008】
この評価ベンチのブレーキトルク算出方法では、トランスアクスルに備わるプラネタリギヤにおいて成立する運動方程式に基づき、入出力ダイナモの各ブレーキトルクに関する伝達関数が導出される。そして、この伝達関数に基づき、入出力ダイナモの各回転数と停止希望時間とから、入出力ダイナモ及び2つのモータジェネレータを停止希望時間で同時に停止させるための入出力ダイナモの各ブレーキトルクが算出される。そして、算出された各ブレーキトルクを入出力ダイナモにそれぞれ入力することにより、2つのモータジェネレータが過回転になることなく、停止希望時間で評価ベンチを確実に停止させることができる。
【0009】
また、このような評価ベンチによれば、従来は実車試験でしか行うことができなかったスリップ・グリップ試験などもベンチによりトランスアクスル単体で試験を行うことができるようになる。それにより、試験の再現性が向上するとともに、開発期間の短縮や開発費用の低減を図ることができる。なお、スリップ・グリップ試験とは、グリップ走行中に一時的にスリップを起こし、再びグリップ走行状態に戻すという試験である。
【0010】
上記した評価ベンチのブレーキトルク算出方法において、前記2つのモータジェネレータのトルク入力をそれぞれゼロとし、前記入出力ダイナモにそれぞれ一定の減速トルクを入力するものとして、前記伝達関数を導出することが望ましい。
【0011】
このようにすることにより、慣性モーメント及び定格トルクがともに、トランスアクスルに備わる2つのモータジェネレータより大きい入出力ダイナモに対し、それぞれブレーキトルクを入力して評価ベンチを停止させることができる。そして、評価ベンチを停止させる際、2つのモータジェネレータをフリーの状態にするため、各モータジェネレータが過回転になったり、各モータジェネレータに過剰なトルクがかかったりすることを確実に防止することができる。
【発明の効果】
【0012】
本発明に係る評価ベンチのブレーキトルク算出方法によれば、上記した通り、評価ベンチの停止時に、トランスアクスルに備わるモータジェネレータが過回転になることなく任意の時間で停止させるためのダイナモのブレーキトルクを算出することができる。これにより、評価ベンチを安全に停止させることができる。
【図面の簡単な説明】
【0013】
【図1】評価ベンチ及びハイブリッドトランスアクスルのシステム構成を示す図である。
【図2】評価ベンチを停止させる際の評価ベンチの動作内容を示すフローチャートである。
【図3】エンジン模擬ダイナモに入力するブレーキトルクの一例を示す図である。
【図4】出力吸収ダイナモに入力するブレーキトルクの一例を示す図である。
【図5】評価ベンチを停止させる際における各モータジェネレータ及びエンジン模擬ダイナモのトルク線図である。
【図6】エンジン回転数及び出力軸回転数の許容領域の一例を示す図である。
【図7】変形例における評価ベンチ及びハイブリッドトランスアクスルのシステム構成を示す図である。
【図8】従来技術により評価ベンチを停止させる際における各モータジェネレータ及びエンジン模擬ダイナモのトルク線図である。
【発明を実施するための形態】
【0014】
以下、本発明の評価ベンチのブレーキトルク算出方法を具体化した実施の形態について、図面に基づき詳細に説明する。本実施の形態では、FR(フロントエンジン・リヤドライブ)車両に搭載されるハイブリッドトランスアクスルを評価する場合を例に挙げて説明する。ここで、ハイブリッドトランスアクスルとは、駆動源の1つであるモータを備え、駆動源の出力を駆動輪に伝達する動力伝達装置であり、本実施の形態に係るハイブリッドトランスアクスルでは、2つのモータジェネレータと動力分割機構とが備わっている。
【0015】
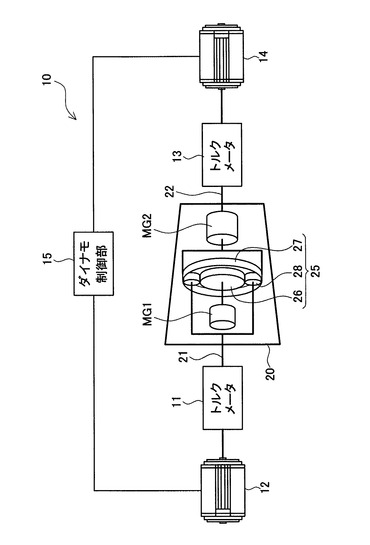
まず、ハイブリッドトランスアクスルの性能評価を行う評価ベンチ、及びハイブリッドトランスアクスルについて、図1を参照しながら簡単に説明する。図1は、評価ベンチ及びハイブリッドトランスアクスルのシステム構成を示す図である。
図1に示すように、評価ベンチ10は、トルクメータ11と、エンジン模擬(入力側)ダイナモ12と、トルクメータ13と、出力吸収(出力側)ダイナモ14と、ダイナモ制御部15とを備えている。トルクメータ11は、検査対象である(ベンチに搭載される)ハイブリッドトランスアクスル20への入力トルクを計測するものである。エンジン模擬ダイナモ12は、ハイブリッドトランスアクスル20にエンジン相当の入力トルクを与えるものである。トルクメータ13は、ハイブリッドトランスアクスル20の出力トルクを計測するものである。出力吸収ダイナモ14は、ハイブリッドトランスアクスル20からの出力を吸収するものである。ダイナモ制御部15は、エンジン模擬ダイナモ12及び出力吸収ダイナモ14を制御するものである。
【0016】
そして、上記の評価ベンチ10に搭載して性能を評価するハイブリッドトランスアクスル20は、モータジェネレータMG1,MG2と、エンジンの動力を入力する入力軸21と、エンジン、モータジェネレータMG1からの動力を出力する出力軸22と、エンジンの動力をモータジェネレータMG1と出力軸22とに分配するプラネタリギヤ25とを備えている。このハイブリッドトランスアクスル20は、評価ベンチ10において、入力軸21がトルクメータ11を介してエンジン模擬ダイナモ12に接続され、出力軸22がトルクメータ13を介して出力吸収ダイナモ14に接続されている。
【0017】
モータジェネレータMG1,MG2は、電力の供給により駆動する電動機としての機能(力行機能)と、機械エネルギを電気エネルギに変換する発電機としての機能(回生機能)とを兼ね備えている。そして、モータジェネレータMG1,MG2としては、例えば、交流同期型のモータジェネレータを用いることができ、電力供給装置としては、例えば、バッテリやキャパシタなどの蓄電装置、あるいは公知の燃料電池などを用いることができる。なお、モータジェネレータMG1が、主として発電機として作動し、モータジェネレータMG2が、主として電動機として作動する。
【0018】
プラネタリギヤ25は、サンギヤ26と、サンギヤ26と同軸上に配置されたリングギヤ27と、サンギヤ26及びリングギヤ27に噛合するプラネタリピニオンギヤ28とを有している。なお、プラネタリピニオンギヤ28は、不図示のプラネタリキャリヤにより保持されている。そして、サンギヤ26とモータジェネレータMG1とが連結され、リングギヤ27とモータジェネレータMG2とが連結されている。また、プラネタリピニオンギヤ28と入力軸21とが連結されている。
【0019】
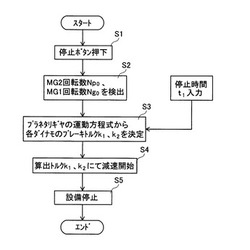
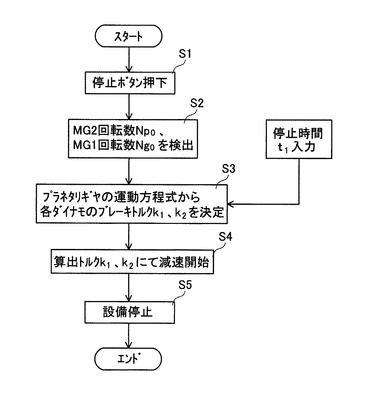
続いて、このようなハイブリッドトランスアクスル20を評価ベンチ10において、性能評価を行う際、評価ベンチ10(ハイブリッドトランスアクスル20)を停止させる手順について、図2を参照しながら説明する。図2は、評価ベンチを停止させる際の評価ベンチの動作内容を示すフローチャートである。
【0020】
まず、評価ベンチ10を停止させる場合には、評価ベンチ10に設けられている停止ボタンが押下される(ステップS1)。そうすると、そのときのモータジェネレータMG2の回転数Np0、及びモータジェネレータMG1の回転数Ng0が検出される(ステップS2)。そして、プラネタリギヤ25の運動方程式から各ダイナモ12,14のブレーキトルクk1,k2が算出される(ステップS3)。このブレーキトルクの算出処理に際して、予め入力されている停止時間t1の情報が取得される。なお、ステップS3におけるブレーキトルクk1,k2の算出方法の詳細については後述する。
【0021】
そして、ステップS3で算出された各ブレーキトルクk1,k2が、エンジン模擬ダイナモ12、出力吸収ダイナモ14にそれぞれかけられて減速が開始する(ステップS4)。その後、停止ボタンが押下されてから時間t1が経過したときに評価ベンチ10(ハイブリッドトランスアクスル20)が停止する(ステップS5)。
【0022】
ここで、ステップS3におけるブレーキトルクk1,k2の算出方法について説明する。まず、一般的なプラネタリギヤにおいて成立する運動方程式に基づき、ハイブリッドトランスアクスル20に備わるプラネタリギヤ25の運動方程式を導出すると、次のようになる。
【数1】

【数2】
なお、式(1),(2)において、Ieはエンジンの慣性質量、IgはモータジェネレータMG1の慣性質量、ImはモータジェネレータMG2の慣性質量、Teはエンジン模擬ダイナモ12のトルク、TgはモータジェネレータMG1のトルク、TmはモータジェネレータMG2のトルク、Tpは出力吸収ダイナモ14のトルク、Txは各ギヤ間に働くトルク(内力)、Neはエンジンの回転数、NgはモータジェネレータMG1の回転数、NpはモータジェネレータMG2の回転数、ρはプラネタリギヤ25のギヤ比である。
【0023】
式(1),(2)から、各ギヤ間に働くトルクTxを消去し、モータジェネレータMG1の回転数Ng、モータジェネレータMG2の回転数Npに関する微分方程式として整理すると、次のようになる。
【数3】
【0024】
式(3)を行列を用いて示すと、次のようになる。
【数4】
【0025】
そして、式(4)を積分すると、モータジェネレータMG1の回転数Ng、モータジェネレータMG2の回転数Npは、次のようになる。
【数5】
【0026】
ここで、式(5)において、入力として、エンジン模擬ダイナモ12のトルクTe、モータジェネレータMG1のトルクTg、モータジェネレータMG2のトルクTm、出力吸収ダイナモ14のトルクTpの4つのトルクがあるが、評価ベンチ10を停止させる場合、入力するトルクの種類は少ないことが好ましい。不用意にトルクを入力すると、過回転や過大トルクが発生してしまうおそれがあるからである。そして、エンジン模擬ダイナモ12及び出力吸収ダイナモ14と、モータジェネレータMG1,MG2を比較すると、エンジン模擬ダイナモ12及び出力吸収ダイナモ14の方が慣性モーメント及び定格トルクが大きい。そのため、モータジェネレータMG1,MG2はフリーの状態で、エンジン模擬ダイナモ12及び出力吸収ダイナモ14に対してブレーキトルクを入力して制御することにより、評価ベンチ10を停止させるのが安全だと考えられる。
【0027】
そこで、式(5)において、Tg=0,Tm=0とすると、次のようになる。これにより、入力するトルクが2つに減少する。
【数6】
【0028】
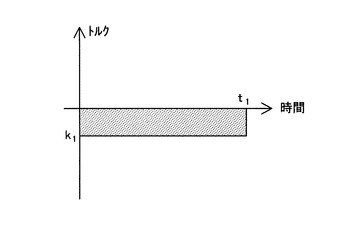
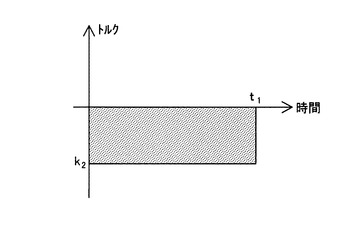
そして、エンジン模擬ダイナモ12、出力吸収ダイナモ14に対して、図3、図4に示すように停止するまで(t=t1で停止)一定の減速トルクを入力するものとすると、入力トルク(ブレーキトルク)T1,T2は、次のように示すことができる。なお、図3は、エンジン模擬ダイナモに入力するブレーキトルクの一例を示す図である。図4は、出力吸収ダイナモに入力するブレーキトルクの一例を示す図である。
【数7】
【数8】
【0029】
式(7),(8)の入力トルクの条件を式(6)に反映させると、次のようになる。
【数9】
【0030】
そして、時間t=t1にて、各ダイナモ12,14を停止させるための入力トルクT1,T2のゲインk1,k2を式(9)から計算すると、次のようになる。
【数10】
【0031】
式(10)により、エンジン模擬ダイナモ12と出力吸収ダイナモ14の各ブレーキトルクを算出することができる。つまり、この式(10)に基づき上記したステップS3において、エンジン模擬ダイナモ12と出力吸収ダイナモ14の各ブレーキトルクk1,k2が算出されるのである。
【0032】
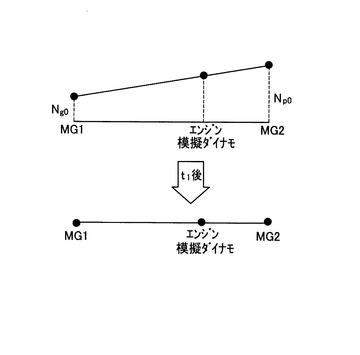
このようにして算出された各ブレーキトルクk1,k2は、それぞれエンジン模擬ダイナモ12と出力吸収ダイナモ14に入力されることにより、図5に示すように、回転していたモータジェネレータMG1,MG2は、停止ボタンが押下されてから時間t1後に、ともに過回転になることなく停止する。なお、図5は、評価ベンチを停止させる際における各モータジェネレータ及びエンジン模擬ダイナモのトルク線図である。
【0033】
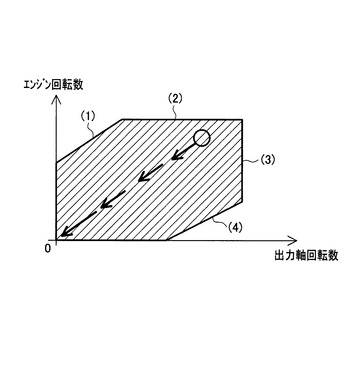
ここで、ハイブリッドトランスアクスル20においては、エンジン、モータジェネレータMG1,MG2、及びプラネタリギヤ25の保護の観点から、エンジン回転数(入力軸回転数)及び出力軸回転数(MG2回転数)の許容領域(図6参照)が規定されている。その一例を図6に示す。図6における(1)〜(4)は、(1)モータジェネレータMG1の最高回転数、(2)エンジンの最高回転数、(3)車速リミット、(4)プラネタリギヤ25の回転数制限を意味する。なお、モータジェネレータMG2の最高回転数は、車速リミットにおける出力軸22の回転数よりも高いため、図6には表示されていない。
【0034】
このような規定のもとで、上記したようにして決定されるブレーキトルクによって評価ベンチ10を停止させると、図6に丸印で示す動作点(停止ボタン押下時)から、出力軸22の回転数及びエンジン回転数が、停止ボタンを押下してから時間t1後に同時にゼロとなる。また、その減速途中において一定のブレーキトルクk1,k2をエンジン模擬ダイナモ12と出力吸収ダイナモ14にそれぞれ作用させているため、図6に矢印で示すように、直線的に原点まで動作点が移動する。
【0035】
従って、上記したように評価ベンチ10を停止させることにより、停止前の動作点が図6に示す許容領域に入っていれば、常にこの領域から逸脱することなく、評価ベンチ10を停止状態まで導くことができる。このため、評価ベンチ10を停止させる際、モータジェネレータMG1,MG2が過回転になったり、モータジェネレータMG1,MG2に過剰なトルクがかかることがない。
その結果として、評価ベンチ10において、従来は実車試験でしか行うことができなかったスリップ・グリップ試験などもトランスアクスル単体で試験を行うことができる。これにより、試験の再現性が向上するとともに、開発期間の短縮や開発費用の低減を図ることができる。
【0036】
以上、詳細に説明したように本実施の形態に係るブレーキトルクの算出方法によれば、ハイブリッドトランスアクスル20に備わるプラネタリギヤ25において成立する運動方程式(式(1))に基づき、エンジン模擬ダイナモ12、出力吸収ダイナモ14の各ブレーキトルクk1,k2に関する伝達関数(式(10))が導出される。そして、この伝達関数に基づき、停止ボタンが押下されたときのエンジン模擬ダイナモ12、出力吸収ダイナモ14の各回転数Ng0,Np0と停止時間t1とから、評価ベンチ10及びモータジェネレータMG1,MG2を停止時間t1で同時に停止させるための各ブレーキトルクk1,k2が算出される。そして、算出された各ブレーキトルクk1,k2をエンジン模擬ダイナモ12、出力吸収ダイナモ14にそれぞれ入力して、評価ベンチ10及びモータジェネレータMG1,MG2を停止させるので、モータジェネレータMG1,MG2が過回転になることなく、評価ベンチ10を確実に停止させることができる。
【0037】
ここで、変形例について説明する。変形例では、FF(フロントエンジン・フロントドライブ)車両に搭載されるハイブリッドトランスを評価する場合について説明する。そこで、FF用ハイブリッドトランスアクスル及びその性能評価を行う評価ベンチについて、図7を参照しながら説明する。図7は、評価ベンチ及びハイブリッドトランスアクスルのシステム構成を示す図である。
【0038】
図7に示すように、FF用ハイブリッドトランスアクスル40には、モータジェネレータMG1,MG2と、エンジンの動力を入力する入力軸41と、エンジン、モータジェネレータMG1からの動力を出力する出力軸42a,42bと、エンジンの動力をモータジェネレータMG1とカウンタ軸43とに分配するプラネタリギヤ25と、カウンタ軸43に固定されたカウンタギヤ44と、カウンタギヤ44に噛合し出力軸42a,42bにトルクを振り分けるディファレンシャルギヤ45とを備えている。
【0039】
このように、FF用ハイブリッドトランスアクスル40には2本の出力軸42a,42bが備わっているため、評価ベンチ30は、トルクメータ31と、エンジン模擬ダイナモ32と、トルクメータ33a,33bと、出力吸収ダイナモ34a,34bと、ダイナモ制御部35とを備えている。そして、ハイブリッドトランスアクスル40は、評価ベンチ30において、入力軸41がトルクメータ31を介してエンジン模擬ダイナモ32に接続され、出力軸42a,42bがトルクメータ33a,33bを介して出力吸収ダイナモ34a,34bに接続されている。
【0040】
そして、このようなハイブリッドトランスアクスル40を評価ベンチ30において、性能評価を行う際、評価ベンチ30(ハイブリッドトランスアクスル40)を停止させる手順は、上記したFR用のものと同様であり、図2に示す通りである。但し、ステップS3において、ブレーキトルクk1,k2を算出する伝達関数を求める際のハイブリッドトランスアクスル40に備わるプラネタリギヤ25の運動方程式が、次のようになる。
【数11】
なお、式(11)において、T1はエンジン模擬ダイナモ32のトルク、T2は出力吸収ダイナモ34aのトルク、T3は出力吸収ダイナモ34bのトルク、Gdeffはディファレンシャルギヤ45のデフ比である。
【0041】
つまり、変形例では、式(11)に示すように、式(1)における出力吸収ダイナモのトルクの項を、出力吸収ダイナモ34a,34bの和に、ディファレンシャルギヤ45のデフ比を乗じたものに変更する。そして、その後は、上記したようにしてブレーキトルクk1,k2を算出すればよい。なお、その算出過程は上記と同様であるので省略する。
【0042】
そして、変形例でも、このようにして算出した各ブレーキトルクk1,k2をエンジン模擬ダイナモ32、出力吸収ダイナモ34a,34bにそれぞれ入力して、評価ベンチ30及びモータジェネレータMG1,MG2を停止させるので、モータジェネレータMG1,MG2が過回転になることなく、評価ベンチ30を確実に停止させることができる。
【0043】
なお、上記した実施の形態は単なる例示にすぎず、本発明を何ら限定するものではなく、その要旨を逸脱しない範囲内で種々の改良、変形が可能であることはもちろんである。
【符号の説明】
【0044】
10 評価ベンチ
12 エンジン模擬ダイナモ
14 出力吸収ダイナモ
15 ダイナモ制御部
20 ハイブリッドトランスアクスル
21 入力軸
22 出力軸
25 プラネタリギヤ
26 サンギヤ
27 リングギヤ
28 プラネタリピニオンギヤ
MG1 モータジェネレータ
MG2 モータジェネレータ
【技術分野】
【0001】
本発明は、ハイブリッド車両に搭載されるトランスアクスルの性能評価を行う評価ベンチのブレーキトルク算出方法に関する。より詳細には、動力分割機構を介して接続された2つのモータを備える2モータ式ハイブリッド車両のトランスアクスルを評価する評価ベンチにおいて、評価ベンチを停止させる際のブレーキトルクを算出する方法に関するものである。
【背景技術】
【0002】
近年、電動機を駆動源として搭載したハイブリッド車両が普及してきた。このようなハイブリッド車両として、動力分割機構を介して接続された2つのモータジェネレータを備える2モータ式のトランスアクスル(ハイブリッドトランスアクスル)を備えたものがある。そして、ハイブリッドトランスアクスルは、実車評価だけでなく、評価ベンチにおいてトランスアクスル単体でも各種試験が実施されている。
【0003】
このような2モータ式のトランスアクスルを評価する評価ベンチ設備として、例えば特許文献1に、2モータ式のトランスアクスル出力性能検査装置が開示されている。この検査装置では、2モータ式のトランスアクスルをダイナモ(負荷モータ及びエンジン相当モータ)により回転させ、トランスアクスルの出力性能を検査している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−140668号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記した装置では、評価ベンチの停止時に、ダイナモのブレーキトルクのかけ方により、検査対象トランスアクスルに備わるモータが過回転となってしまい、安全に停止させることができないおそれがあった。なぜなら、トランスアクスルに動力分割機構が設けられているため、図8に示すように、エンジン模擬ダイナモ(エンジン相当モータ)、出力吸収ダイナモ(負荷モータ)を停止する順番により、モータジェネレータMG1が過回転となってしまうのである。
【0006】
そこで、本発明は上記した問題点を解決するためになされたものであり、評価ベンチの停止時に、ハイブリッドトランスアクスルに備わるモータジェネレータが過回転になることなく任意の時間で停止させるためのダイナモのブレーキトルクを算出することができる評価ベンチのブレーキトルク算出方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するためになされた本発明の一態様は、プラネタリギヤを介して接続された2つのモータジェネレータを備える2モータ式ハイブリッドトランスアクスルの入力側及び出力側にそれぞれダイナモを接続し、ぞれぞれのダイナモにより前記2つのモータジェネレータを回転させて性能評価を行う評価ベンチを停止させる際のブレーキトルクを算出する評価ベンチのブレーキトルク算出方法において、前記プラネタリギヤに関する運動方程式に基づき、前記入出力ダイナモの各ブレーキトルクに関する伝達関数を導出して、前記入出力ダイナモの各回転数と停止希望時間とから、前記入出力ダイナモ及び前記2つのモータジェネレータを前記停止希望時間で同時に停止させるための前記入出力ダイナモの各ブレーキトルクを算出することを特徴とする。
【0008】
この評価ベンチのブレーキトルク算出方法では、トランスアクスルに備わるプラネタリギヤにおいて成立する運動方程式に基づき、入出力ダイナモの各ブレーキトルクに関する伝達関数が導出される。そして、この伝達関数に基づき、入出力ダイナモの各回転数と停止希望時間とから、入出力ダイナモ及び2つのモータジェネレータを停止希望時間で同時に停止させるための入出力ダイナモの各ブレーキトルクが算出される。そして、算出された各ブレーキトルクを入出力ダイナモにそれぞれ入力することにより、2つのモータジェネレータが過回転になることなく、停止希望時間で評価ベンチを確実に停止させることができる。
【0009】
また、このような評価ベンチによれば、従来は実車試験でしか行うことができなかったスリップ・グリップ試験などもベンチによりトランスアクスル単体で試験を行うことができるようになる。それにより、試験の再現性が向上するとともに、開発期間の短縮や開発費用の低減を図ることができる。なお、スリップ・グリップ試験とは、グリップ走行中に一時的にスリップを起こし、再びグリップ走行状態に戻すという試験である。
【0010】
上記した評価ベンチのブレーキトルク算出方法において、前記2つのモータジェネレータのトルク入力をそれぞれゼロとし、前記入出力ダイナモにそれぞれ一定の減速トルクを入力するものとして、前記伝達関数を導出することが望ましい。
【0011】
このようにすることにより、慣性モーメント及び定格トルクがともに、トランスアクスルに備わる2つのモータジェネレータより大きい入出力ダイナモに対し、それぞれブレーキトルクを入力して評価ベンチを停止させることができる。そして、評価ベンチを停止させる際、2つのモータジェネレータをフリーの状態にするため、各モータジェネレータが過回転になったり、各モータジェネレータに過剰なトルクがかかったりすることを確実に防止することができる。
【発明の効果】
【0012】
本発明に係る評価ベンチのブレーキトルク算出方法によれば、上記した通り、評価ベンチの停止時に、トランスアクスルに備わるモータジェネレータが過回転になることなく任意の時間で停止させるためのダイナモのブレーキトルクを算出することができる。これにより、評価ベンチを安全に停止させることができる。
【図面の簡単な説明】
【0013】
【図1】評価ベンチ及びハイブリッドトランスアクスルのシステム構成を示す図である。
【図2】評価ベンチを停止させる際の評価ベンチの動作内容を示すフローチャートである。
【図3】エンジン模擬ダイナモに入力するブレーキトルクの一例を示す図である。
【図4】出力吸収ダイナモに入力するブレーキトルクの一例を示す図である。
【図5】評価ベンチを停止させる際における各モータジェネレータ及びエンジン模擬ダイナモのトルク線図である。
【図6】エンジン回転数及び出力軸回転数の許容領域の一例を示す図である。
【図7】変形例における評価ベンチ及びハイブリッドトランスアクスルのシステム構成を示す図である。
【図8】従来技術により評価ベンチを停止させる際における各モータジェネレータ及びエンジン模擬ダイナモのトルク線図である。
【発明を実施するための形態】
【0014】
以下、本発明の評価ベンチのブレーキトルク算出方法を具体化した実施の形態について、図面に基づき詳細に説明する。本実施の形態では、FR(フロントエンジン・リヤドライブ)車両に搭載されるハイブリッドトランスアクスルを評価する場合を例に挙げて説明する。ここで、ハイブリッドトランスアクスルとは、駆動源の1つであるモータを備え、駆動源の出力を駆動輪に伝達する動力伝達装置であり、本実施の形態に係るハイブリッドトランスアクスルでは、2つのモータジェネレータと動力分割機構とが備わっている。
【0015】
まず、ハイブリッドトランスアクスルの性能評価を行う評価ベンチ、及びハイブリッドトランスアクスルについて、図1を参照しながら簡単に説明する。図1は、評価ベンチ及びハイブリッドトランスアクスルのシステム構成を示す図である。
図1に示すように、評価ベンチ10は、トルクメータ11と、エンジン模擬(入力側)ダイナモ12と、トルクメータ13と、出力吸収(出力側)ダイナモ14と、ダイナモ制御部15とを備えている。トルクメータ11は、検査対象である(ベンチに搭載される)ハイブリッドトランスアクスル20への入力トルクを計測するものである。エンジン模擬ダイナモ12は、ハイブリッドトランスアクスル20にエンジン相当の入力トルクを与えるものである。トルクメータ13は、ハイブリッドトランスアクスル20の出力トルクを計測するものである。出力吸収ダイナモ14は、ハイブリッドトランスアクスル20からの出力を吸収するものである。ダイナモ制御部15は、エンジン模擬ダイナモ12及び出力吸収ダイナモ14を制御するものである。
【0016】
そして、上記の評価ベンチ10に搭載して性能を評価するハイブリッドトランスアクスル20は、モータジェネレータMG1,MG2と、エンジンの動力を入力する入力軸21と、エンジン、モータジェネレータMG1からの動力を出力する出力軸22と、エンジンの動力をモータジェネレータMG1と出力軸22とに分配するプラネタリギヤ25とを備えている。このハイブリッドトランスアクスル20は、評価ベンチ10において、入力軸21がトルクメータ11を介してエンジン模擬ダイナモ12に接続され、出力軸22がトルクメータ13を介して出力吸収ダイナモ14に接続されている。
【0017】
モータジェネレータMG1,MG2は、電力の供給により駆動する電動機としての機能(力行機能)と、機械エネルギを電気エネルギに変換する発電機としての機能(回生機能)とを兼ね備えている。そして、モータジェネレータMG1,MG2としては、例えば、交流同期型のモータジェネレータを用いることができ、電力供給装置としては、例えば、バッテリやキャパシタなどの蓄電装置、あるいは公知の燃料電池などを用いることができる。なお、モータジェネレータMG1が、主として発電機として作動し、モータジェネレータMG2が、主として電動機として作動する。
【0018】
プラネタリギヤ25は、サンギヤ26と、サンギヤ26と同軸上に配置されたリングギヤ27と、サンギヤ26及びリングギヤ27に噛合するプラネタリピニオンギヤ28とを有している。なお、プラネタリピニオンギヤ28は、不図示のプラネタリキャリヤにより保持されている。そして、サンギヤ26とモータジェネレータMG1とが連結され、リングギヤ27とモータジェネレータMG2とが連結されている。また、プラネタリピニオンギヤ28と入力軸21とが連結されている。
【0019】
続いて、このようなハイブリッドトランスアクスル20を評価ベンチ10において、性能評価を行う際、評価ベンチ10(ハイブリッドトランスアクスル20)を停止させる手順について、図2を参照しながら説明する。図2は、評価ベンチを停止させる際の評価ベンチの動作内容を示すフローチャートである。
【0020】
まず、評価ベンチ10を停止させる場合には、評価ベンチ10に設けられている停止ボタンが押下される(ステップS1)。そうすると、そのときのモータジェネレータMG2の回転数Np0、及びモータジェネレータMG1の回転数Ng0が検出される(ステップS2)。そして、プラネタリギヤ25の運動方程式から各ダイナモ12,14のブレーキトルクk1,k2が算出される(ステップS3)。このブレーキトルクの算出処理に際して、予め入力されている停止時間t1の情報が取得される。なお、ステップS3におけるブレーキトルクk1,k2の算出方法の詳細については後述する。
【0021】
そして、ステップS3で算出された各ブレーキトルクk1,k2が、エンジン模擬ダイナモ12、出力吸収ダイナモ14にそれぞれかけられて減速が開始する(ステップS4)。その後、停止ボタンが押下されてから時間t1が経過したときに評価ベンチ10(ハイブリッドトランスアクスル20)が停止する(ステップS5)。
【0022】
ここで、ステップS3におけるブレーキトルクk1,k2の算出方法について説明する。まず、一般的なプラネタリギヤにおいて成立する運動方程式に基づき、ハイブリッドトランスアクスル20に備わるプラネタリギヤ25の運動方程式を導出すると、次のようになる。
【数1】
【数2】
なお、式(1),(2)において、Ieはエンジンの慣性質量、IgはモータジェネレータMG1の慣性質量、ImはモータジェネレータMG2の慣性質量、Teはエンジン模擬ダイナモ12のトルク、TgはモータジェネレータMG1のトルク、TmはモータジェネレータMG2のトルク、Tpは出力吸収ダイナモ14のトルク、Txは各ギヤ間に働くトルク(内力)、Neはエンジンの回転数、NgはモータジェネレータMG1の回転数、NpはモータジェネレータMG2の回転数、ρはプラネタリギヤ25のギヤ比である。
【0023】
式(1),(2)から、各ギヤ間に働くトルクTxを消去し、モータジェネレータMG1の回転数Ng、モータジェネレータMG2の回転数Npに関する微分方程式として整理すると、次のようになる。
【数3】
【0024】
式(3)を行列を用いて示すと、次のようになる。
【数4】
【0025】
そして、式(4)を積分すると、モータジェネレータMG1の回転数Ng、モータジェネレータMG2の回転数Npは、次のようになる。
【数5】
【0026】
ここで、式(5)において、入力として、エンジン模擬ダイナモ12のトルクTe、モータジェネレータMG1のトルクTg、モータジェネレータMG2のトルクTm、出力吸収ダイナモ14のトルクTpの4つのトルクがあるが、評価ベンチ10を停止させる場合、入力するトルクの種類は少ないことが好ましい。不用意にトルクを入力すると、過回転や過大トルクが発生してしまうおそれがあるからである。そして、エンジン模擬ダイナモ12及び出力吸収ダイナモ14と、モータジェネレータMG1,MG2を比較すると、エンジン模擬ダイナモ12及び出力吸収ダイナモ14の方が慣性モーメント及び定格トルクが大きい。そのため、モータジェネレータMG1,MG2はフリーの状態で、エンジン模擬ダイナモ12及び出力吸収ダイナモ14に対してブレーキトルクを入力して制御することにより、評価ベンチ10を停止させるのが安全だと考えられる。
【0027】
そこで、式(5)において、Tg=0,Tm=0とすると、次のようになる。これにより、入力するトルクが2つに減少する。
【数6】
【0028】
そして、エンジン模擬ダイナモ12、出力吸収ダイナモ14に対して、図3、図4に示すように停止するまで(t=t1で停止)一定の減速トルクを入力するものとすると、入力トルク(ブレーキトルク)T1,T2は、次のように示すことができる。なお、図3は、エンジン模擬ダイナモに入力するブレーキトルクの一例を示す図である。図4は、出力吸収ダイナモに入力するブレーキトルクの一例を示す図である。
【数7】
【数8】
【0029】
式(7),(8)の入力トルクの条件を式(6)に反映させると、次のようになる。
【数9】
【0030】
そして、時間t=t1にて、各ダイナモ12,14を停止させるための入力トルクT1,T2のゲインk1,k2を式(9)から計算すると、次のようになる。
【数10】
【0031】
式(10)により、エンジン模擬ダイナモ12と出力吸収ダイナモ14の各ブレーキトルクを算出することができる。つまり、この式(10)に基づき上記したステップS3において、エンジン模擬ダイナモ12と出力吸収ダイナモ14の各ブレーキトルクk1,k2が算出されるのである。
【0032】
このようにして算出された各ブレーキトルクk1,k2は、それぞれエンジン模擬ダイナモ12と出力吸収ダイナモ14に入力されることにより、図5に示すように、回転していたモータジェネレータMG1,MG2は、停止ボタンが押下されてから時間t1後に、ともに過回転になることなく停止する。なお、図5は、評価ベンチを停止させる際における各モータジェネレータ及びエンジン模擬ダイナモのトルク線図である。
【0033】
ここで、ハイブリッドトランスアクスル20においては、エンジン、モータジェネレータMG1,MG2、及びプラネタリギヤ25の保護の観点から、エンジン回転数(入力軸回転数)及び出力軸回転数(MG2回転数)の許容領域(図6参照)が規定されている。その一例を図6に示す。図6における(1)〜(4)は、(1)モータジェネレータMG1の最高回転数、(2)エンジンの最高回転数、(3)車速リミット、(4)プラネタリギヤ25の回転数制限を意味する。なお、モータジェネレータMG2の最高回転数は、車速リミットにおける出力軸22の回転数よりも高いため、図6には表示されていない。
【0034】
このような規定のもとで、上記したようにして決定されるブレーキトルクによって評価ベンチ10を停止させると、図6に丸印で示す動作点(停止ボタン押下時)から、出力軸22の回転数及びエンジン回転数が、停止ボタンを押下してから時間t1後に同時にゼロとなる。また、その減速途中において一定のブレーキトルクk1,k2をエンジン模擬ダイナモ12と出力吸収ダイナモ14にそれぞれ作用させているため、図6に矢印で示すように、直線的に原点まで動作点が移動する。
【0035】
従って、上記したように評価ベンチ10を停止させることにより、停止前の動作点が図6に示す許容領域に入っていれば、常にこの領域から逸脱することなく、評価ベンチ10を停止状態まで導くことができる。このため、評価ベンチ10を停止させる際、モータジェネレータMG1,MG2が過回転になったり、モータジェネレータMG1,MG2に過剰なトルクがかかることがない。
その結果として、評価ベンチ10において、従来は実車試験でしか行うことができなかったスリップ・グリップ試験などもトランスアクスル単体で試験を行うことができる。これにより、試験の再現性が向上するとともに、開発期間の短縮や開発費用の低減を図ることができる。
【0036】
以上、詳細に説明したように本実施の形態に係るブレーキトルクの算出方法によれば、ハイブリッドトランスアクスル20に備わるプラネタリギヤ25において成立する運動方程式(式(1))に基づき、エンジン模擬ダイナモ12、出力吸収ダイナモ14の各ブレーキトルクk1,k2に関する伝達関数(式(10))が導出される。そして、この伝達関数に基づき、停止ボタンが押下されたときのエンジン模擬ダイナモ12、出力吸収ダイナモ14の各回転数Ng0,Np0と停止時間t1とから、評価ベンチ10及びモータジェネレータMG1,MG2を停止時間t1で同時に停止させるための各ブレーキトルクk1,k2が算出される。そして、算出された各ブレーキトルクk1,k2をエンジン模擬ダイナモ12、出力吸収ダイナモ14にそれぞれ入力して、評価ベンチ10及びモータジェネレータMG1,MG2を停止させるので、モータジェネレータMG1,MG2が過回転になることなく、評価ベンチ10を確実に停止させることができる。
【0037】
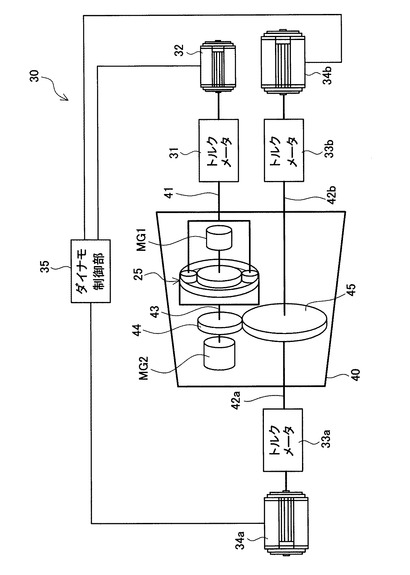
ここで、変形例について説明する。変形例では、FF(フロントエンジン・フロントドライブ)車両に搭載されるハイブリッドトランスを評価する場合について説明する。そこで、FF用ハイブリッドトランスアクスル及びその性能評価を行う評価ベンチについて、図7を参照しながら説明する。図7は、評価ベンチ及びハイブリッドトランスアクスルのシステム構成を示す図である。
【0038】
図7に示すように、FF用ハイブリッドトランスアクスル40には、モータジェネレータMG1,MG2と、エンジンの動力を入力する入力軸41と、エンジン、モータジェネレータMG1からの動力を出力する出力軸42a,42bと、エンジンの動力をモータジェネレータMG1とカウンタ軸43とに分配するプラネタリギヤ25と、カウンタ軸43に固定されたカウンタギヤ44と、カウンタギヤ44に噛合し出力軸42a,42bにトルクを振り分けるディファレンシャルギヤ45とを備えている。
【0039】
このように、FF用ハイブリッドトランスアクスル40には2本の出力軸42a,42bが備わっているため、評価ベンチ30は、トルクメータ31と、エンジン模擬ダイナモ32と、トルクメータ33a,33bと、出力吸収ダイナモ34a,34bと、ダイナモ制御部35とを備えている。そして、ハイブリッドトランスアクスル40は、評価ベンチ30において、入力軸41がトルクメータ31を介してエンジン模擬ダイナモ32に接続され、出力軸42a,42bがトルクメータ33a,33bを介して出力吸収ダイナモ34a,34bに接続されている。
【0040】
そして、このようなハイブリッドトランスアクスル40を評価ベンチ30において、性能評価を行う際、評価ベンチ30(ハイブリッドトランスアクスル40)を停止させる手順は、上記したFR用のものと同様であり、図2に示す通りである。但し、ステップS3において、ブレーキトルクk1,k2を算出する伝達関数を求める際のハイブリッドトランスアクスル40に備わるプラネタリギヤ25の運動方程式が、次のようになる。
【数11】
なお、式(11)において、T1はエンジン模擬ダイナモ32のトルク、T2は出力吸収ダイナモ34aのトルク、T3は出力吸収ダイナモ34bのトルク、Gdeffはディファレンシャルギヤ45のデフ比である。
【0041】
つまり、変形例では、式(11)に示すように、式(1)における出力吸収ダイナモのトルクの項を、出力吸収ダイナモ34a,34bの和に、ディファレンシャルギヤ45のデフ比を乗じたものに変更する。そして、その後は、上記したようにしてブレーキトルクk1,k2を算出すればよい。なお、その算出過程は上記と同様であるので省略する。
【0042】
そして、変形例でも、このようにして算出した各ブレーキトルクk1,k2をエンジン模擬ダイナモ32、出力吸収ダイナモ34a,34bにそれぞれ入力して、評価ベンチ30及びモータジェネレータMG1,MG2を停止させるので、モータジェネレータMG1,MG2が過回転になることなく、評価ベンチ30を確実に停止させることができる。
【0043】
なお、上記した実施の形態は単なる例示にすぎず、本発明を何ら限定するものではなく、その要旨を逸脱しない範囲内で種々の改良、変形が可能であることはもちろんである。
【符号の説明】
【0044】
10 評価ベンチ
12 エンジン模擬ダイナモ
14 出力吸収ダイナモ
15 ダイナモ制御部
20 ハイブリッドトランスアクスル
21 入力軸
22 出力軸
25 プラネタリギヤ
26 サンギヤ
27 リングギヤ
28 プラネタリピニオンギヤ
MG1 モータジェネレータ
MG2 モータジェネレータ
【特許請求の範囲】
【請求項1】
プラネタリギヤを介して接続された2つのモータジェネレータを備える2モータ式ハイブリッドトランスアクスルの入力側及び出力側にそれぞれダイナモを接続し、ぞれぞれのダイナモにより前記2つのモータジェネレータを回転させて性能評価を行う評価ベンチを停止させる際のブレーキトルクを算出する方法において、
前記プラネタリギヤに関する運動方程式に基づき、前記入出力ダイナモの各ブレーキトルクに関する伝達関数を導出して、前記入出力ダイナモの各回転数と停止希望時間とから、前記入出力ダイナモ及び前記2つのモータジェネレータを前記停止希望時間で同時に停止させるための前記入出力ダイナモの各ブレーキトルクを算出する
ことを特徴とする評価ベンチのブレーキトルク算出方法。
【請求項2】
請求項1に記載する評価ベンチのブレーキトルク算出方法において、
前記2つのモータジェネレータのトルク入力をそれぞれゼロとし、前記入出力ダイナモにそれぞれ一定の減速トルクを入力するものとして、前記伝達関数を導出する
ことを特徴とする評価ベンチのブレーキトルク算出方法。
【請求項1】
プラネタリギヤを介して接続された2つのモータジェネレータを備える2モータ式ハイブリッドトランスアクスルの入力側及び出力側にそれぞれダイナモを接続し、ぞれぞれのダイナモにより前記2つのモータジェネレータを回転させて性能評価を行う評価ベンチを停止させる際のブレーキトルクを算出する方法において、
前記プラネタリギヤに関する運動方程式に基づき、前記入出力ダイナモの各ブレーキトルクに関する伝達関数を導出して、前記入出力ダイナモの各回転数と停止希望時間とから、前記入出力ダイナモ及び前記2つのモータジェネレータを前記停止希望時間で同時に停止させるための前記入出力ダイナモの各ブレーキトルクを算出する
ことを特徴とする評価ベンチのブレーキトルク算出方法。
【請求項2】
請求項1に記載する評価ベンチのブレーキトルク算出方法において、
前記2つのモータジェネレータのトルク入力をそれぞれゼロとし、前記入出力ダイナモにそれぞれ一定の減速トルクを入力するものとして、前記伝達関数を導出する
ことを特徴とする評価ベンチのブレーキトルク算出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−132783(P2012−132783A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2010−285058(P2010−285058)
【出願日】平成22年12月21日(2010.12.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成22年12月21日(2010.12.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]