
評価表示システム、方法およびプログラム
【課題】ハイブリッド車両の運転者が自信の運転技術を向上させるための情報を案内する技術の提供。
【解決手段】表示部にハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示し、前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得し、前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得し、前記地図上に前記単位区間毎の前記今回評価と前記過去評価とを併せて表示するとともに、EV走行とHV走行時の燃費の評価とを区別して表示する。
【解決手段】表示部にハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示し、前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得し、前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得し、前記地図上に前記単位区間毎の前記今回評価と前記過去評価とを併せて表示するとともに、EV走行とHV走行時の燃費の評価とを区別して表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の燃費の評価を表示する評価表示システム、方法およびプログラムに関する。
【背景技術】
【0002】
従来、車両の燃費を改善させるための表示を行う各種の技術が開発されている。例えば、特許文献1においては、今回走行した経路内の場所に関連づけて自車のエネルギー消費量が基準値を超過したことを表示する技術が開示されている。また、特許文献2においては、今回の燃費と過去の燃費の平均とを区間毎に比較可能な情報を表示する技術が開示されている。さらに、特許文献3においては、過去の走行における燃費の評価(良、中間、悪等)を地図上にて地点または路線毎に表示し、車両の現在位置における現在の燃費の評価を併せて表示する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−33447号公報
【特許文献2】特開2004−251786号公報
【特許文献3】特開2002−350152号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来技術においては、今回の走行における燃費の評価と過去の走行における燃費の評価とに基づいて有意な比較をすることが困難であった。特に、ハイブリッド車両において高い走行効率を実現するための情報を得ることはできなかった。すなわち、特許文献1,2に開示された技術においては、今回の走行における燃費を基準値や過去の平均値と比較しており、これらの技術では今回の走行における燃費を評価しているものの、過去の走行における燃費の評価は示されない。従って、車両の運転者が、運転中に過去の走行における燃費の評価と今回の走行における燃費の評価とを対比することができず、現在位置以降の運転を改善することによって今回の走行における燃料消費を抑制する余地があるのか否かを判定することができない。
【0005】
また、特許文献3に開示された技術においては、過去の走行における燃費の評価が地点毎に表示されるものの、今回の走行における燃費の評価は現在位置における瞬間値が表示されるのみである。そして、消費燃料を抑制するために運転中に運転者が継続的に瞬間値に留意することは事実上不可能であり、今回の燃費が継続的に良好であったのか否かを判断できない。従って、特許文献3においても、運転中に過去の走行における燃費の評価と今回の走行における燃費の評価とを対比することができず、現在位置以前の今回の走行での消費燃料を考慮した上で現在位置以降の運転に改善余地があるのか否かを判定することは事実上不可能である。従って、従来、今回の走行中に運転を改善して消費燃料を抑制することは極めて困難であった。
【0006】
さらに、上述の従来技術においては、ハイブリッド車両の動作状態を示す表示を行っていない。すなわち、ハイブリッド車両においては、内燃機関の駆動が許可されるHV走行と、内燃機関の駆動が停止されてモータによって走行するEV走行とによって走行を行うことが可能であり、単位距離を走行するための液体燃料を補給するコストよりも単位距離を走行するための電力を補給するコストの方が低コストである現在においては、EV走行を行った方が単位距離を走行するための車両の走行効率が高い。そして、一般的なハイブリッド車両においては、運転技術が向上すると同一の区間であってもHV走行における燃費が徐々に良い燃費となり、さらに運転技術が向上するとHV走行ではなくEV走行によって走行することが可能になる。一方、EV走行を行うためには、車両のバッテリがEV走行を行うために充分なSOC(State Of Charge)となっていなければならない。従来技術のような表示では、このような状況を勘案してハイブリッド車両の運転者が運転技術を向上することはできない。
本発明は、前記課題にかんがみてなされたもので、ハイブリッド車両の運転者が自信の運転技術を向上させるための情報を案内する技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記の目的を達成するため、本発明においては、ハイブリッド車両の現在位置が表示されている地図上の単位区間毎に、ハイブリッド車両の今回の走行における燃費の評価を示す今回評価アイコンと、今回の走行よりも過去におけるハイブリッド車両の燃費の評価を示す過去評価アイコンとを、併せて表示する。さらに、今回評価アイコンおよび過去評価アイコンは、EVアイコンとHVアイコンとのいずれかで表現される。そして、EVアイコンは、ハイブリッド車両がEV走行によって単位区間内の評価区間を走行したことを示すアイコンであり、HVアイコンはハイブリッド車両がHV走行によって単位区間内の評価区間を走行した場合の燃費の評価を示すアイコンである。
【0008】
すなわち、今回評価アイコンと過去評価アイコンとが同時に視認されるように地図上に各アイコンを表示する。この結果、運転者は今回の走行区間における燃費の評価と過去の燃費の評価とを運転中に容易に比較しながら運転を行うことができる。さらに、各アイコンは、EVアイコンあるいはHVアイコンであるため、運転者は単位区間内の評価区間がEV走行によって走行されたのか、HV走行によって走行されたのかを判定することができる。
【0009】
ここで、今回評価は単位区間毎の燃費の評価である。このため、ハイブリッド車両の走行が進んで今回の走行における走行済の区間が地図上の複数の単位区間に渡る区間となれば、今回評価アイコンが複数の単位区間に渡って地図上に表示される。そして、HVアイコンで今回評価が示される場合、その評価は燃費の良し悪しを示す。一方、EVアイコンで今回評価が示される場合、内燃機関を使用せず、モータで走行することで内燃機関を駆動するための燃料を消費しない状態であることを示す。従って、運転者は今回の各単位区間における走行がEV走行とHV走行とのいずれであったのかを認識することが可能になる。また、HV走行であった場合、運転者は、燃費の良し悪しを複数の単位区間に渡って認識することが可能になる。さらに、運転者は今回の走行において走行済の複数の単位区間に渡るEV走行とHV走行との比率から、今回の走行にてEV走行をすることができた単位区間の比率の多寡を把握することができる。また、運転者は今回の走行においてHV走行にて走行した複数の単位区間に渡る燃費の評価の良し悪しから、今回の走行においてHV走行にて走行した区間において総燃料消費量が抑制されている傾向であるのか、総燃料消費量が多い傾向であるのかを把握することができる。
【0010】
一方、過去評価も単位区間毎の燃費の評価である。ハイブリッド車両において過去に単位区間の一つのみを走行したという状況は事実上想定し得ないため、過去評価アイコンも複数の単位区間に渡って地図上に表示される。従って、運転者は複数の単位区間に渡る過去評価を認識することが可能になる。そして、過去評価アイコンもEVアイコン、HVアイコンのいずれかで表現されるため、運転者は過去の各単位区間における走行がEV走行とHV走行とのいずれであったのか、また、HV走行であった場合には、燃費の良し悪しを複数の単位区間に渡って認識することが可能になる。さらに、運転者は過去の走行において走行済の複数の単位区間に渡るEV走行とHV走行との比率から、過去の走行においてEV走行をすることができた単位区間の比率の多寡を把握することができる。従って、過去の走行においてEV走行をすることができた単位区間の比率が多い場合には、過去の走行において液体燃料の燃料消費を抑制しながら運転することができたと推定することができる。
【0011】
また、過去の走行と今回の走行とにおけるEV走行の多寡によって、できるだけ長期間EV走行を継続するための指針を得ることが可能である。例えば、過去の走行においてEV走行をすることができ、今回の走行においてEV走行をすることができなかった(HV走行となった)単位区間が存在する場合、例えば、以下の2要因が原因となりえる。
要因1:今回の走行においてはEV走行をすることができないSOCであった
要因2:今回の走行における運転操作が非効率な運転となるような運転操作であった(例えば、過度にアクセル操作をした)
【0012】
そこで、過去の走行において複数の単位区間にて連続的にEV走行をすることができ、今回の走行において当該複数の単位区間内で連続的にEV走行をすることができなかった場合や、過去の走行においてEV走行をすることができた単位区間であって今回の走行においてEV走行をすることができなかった単位区間が連続する場合、評価悪化の原因は要因1であると推定することができる。すなわち、過去に複数の単位区間に渡って連続的にEV走行できた場合には運転者にとって当該複数の単位区間においてEV走行を行うことが容易であると推定され、このような複数の単位区間で今回連続的にEV走行できないのであれば、運転者の技術によってEV走行できなかったのではなく、バッテリのSOCが低下してEV走行ができない状態であったと推定する方が妥当である。従って、今回の走行においてEV走行をすることができなかった複数の単位区間についての評価を次回以降の運転操作の指針としないように判断することができる。
【0013】
一方、複数の単位区間にて過去の走行において連続的にEV走行をすることができ、当該複数の単位区間についての今回の走行でEV走行をできなかった単位区間が離散的に現れる場合、評価悪化の原因は要因2であると推定することができる。すなわち、バッテリのSOCは走行とともに徐々に変化するため、SOCの状態が単位区間毎に繰り返して大きく変化する確率は低い。従って、今回の走行でEV走行することができなかった単位区間において運転者自身が効率的に運転を行うように心がけることにより、EV走行で走行する単位区間の数を増やすことが可能になる。
【0014】
さらに、運転者は過去の走行においてHV走行にて走行した複数の単位区間に渡る燃費の評価の良し悪しから、過去の走行におけるHV走行で総燃料消費量が抑制されている傾向であったのか、総燃料消費量が多い傾向であったのかを把握することができる。従って、過去の走行におけるHV走行で総燃料消費量が抑制されている傾向であった区間においては、自身が再度同一区間を走行する際に燃料消費を抑制しながら運転することが容易であると推定することができる。また、過去の走行において総燃料消費量が多い傾向であった区間においては、燃費の改善の余地があると推定することができる。すなわち、過去に走行した区間の燃費の評価に基づいて当該区間での走行の指針を決定することができる。
【0015】
そして、本発明においては、地図上に単位区間毎の今回評価アイコンと過去評価アイコンとが併せて表示されるため、運転者は複数の単位区間に渡る今回評価と過去評価とを運転中に対比しながら運転を行うことができる。一般に、ハイブリッド車両の走行過程において運転者が表示部を凝視することはできず、運転者は表示部に表示された情報を断続的に視認することができるに過ぎない。そして、運転者が現在位置を走行している瞬間における燃費の評価を断続的に認識して過去の評価と比較したとしても、走行開始から終了までの過程で燃料の消費量を抑制できるか否かを判断することは困難である。
【0016】
しかし、本発明においては、単位区間毎の今回評価アイコンと過去評価アイコンとを併せて地図に表示するため、運転者は複数の単位区間についての今回評価アイコンと過去評価アイコンとを一覧して把握することができる。従って、運転者が現在位置以降に走行し得る単位区間における過去評価と今回評価を対比することにより、今回の走行における総燃料消費量の程度に応じて過去に走行した区間の指針を決定しながら運転を行うことが可能になる。例えば、現在位置以降の区間における過去評価が表示されている状態において、現在位置までの今回の走行において総燃料消費量が多く、運転者が今後の走行で燃料消費量を抑制したいと考える場合、過去の走行で総燃料消費量が多い傾向であった区間において、アクセル開度を抑えて走行すれば燃費を改善できると推定することができる。また、過去の走行で総燃料消費量が抑制されている傾向であった区間においては、過度に慎重な運転をしなくても燃料消費を抑制可能であると推定することができる。
【0017】
さらに、現在位置周辺の区間における過去評価が表示されている状態において、現在位置までの今回の走行において総燃料消費量が多く、運転者が今後の走行で燃料消費量を抑制したいと考える場合、過去の走行で総燃料消費量が抑制されている傾向であった区間を走行するように経路を選択すれば、燃料消費を抑制可能であると推定することができる。
【0018】
さらに、今回走行した区間と過去に走行した区間とが一致している場合、すなわち、過去評価アイコンが表示されていた区間をハイブリッド車両にて走行した場合、同一の単位区間における過去評価と今回評価とを対比することができる。この場合に運転者は、過去評価に比べて今回評価がどのように変化したのかを認識することができる。従って、運転者は今回走行した区間において総燃料消費量が過去に比べて改善しているのか否かを把握しながら運転をすることができる。
【0019】
ここで、地図表示制御手段は、表示部にハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示し、また、地図上に単位区間毎の今回評価アイコンと過去評価アイコンとを併せて表示することができればよい。すなわち、表示部に、ハイブリッド車両の現在位置の周辺における道路や施設等を示す地図と、ハイブリッド車両の現在位置を示す情報と、今回評価アイコンと過去評価アイコンとを表示することができればよい。なお、本発明においては地図上の単位区間毎に今回評価アイコンと過去評価アイコンとが表示されるように構成される。ここで、今回評価と過去評価とは単位区間毎に定義され、今回においても過去においても通常は、複数の単位区間を走行するため、地図上においては複数の連続する単位区間における今回評価アイコンと過去評価アイコンとが表示されることになる。
【0020】
また、単位区間は、燃費に関する評価の結論を導くための区間であればよく、一定距離の区間を単位区間としても良いし、所定の規則によって決められた区間を単位区間としても良い。後者としては、例えば、地図情報が示す最も近いノード同士を端点とする一つのリンクを一つの単位区間とする構成等を採用可能である。さらに、今回評価アイコンを表示する対象となる単位区間と過去評価アイコンを表示する対象となる単位区間とは、一致していても良いし異なっていても良い。すなわち、単位区間が共通の規則で決められていればよく、表示対象の単位区間は適宜選択されて良い。
【0021】
今回評価取得手段は、ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得することができればよい。すなわち、現在位置を終点とする今回の走行区間のうち、少なくとも地図に表示されている区間についての今回評価を単位区間毎に取得すればよい。ここで、今回の走行区間は現在位置が終点となる区間であり、ハイブリッド車両の進行とともに区間の総距離が大きくなる。また、今回の走行区間の始点は特に限定されず、現在位置まで連続的に走行した場合において当該連続的な走行の開始地点を今回の走行区間の始点としても良いし、走行日が異なるなど非連続な走行が行われた場合において現在位置に到達する前にハイブリッド車両が存在した地点を区間の始点としても良い。すなわち、今回の走行と今回の走行よりも過去の走行とが区別されて対比できるように今回の走行区間が定義されていればよい。
【0022】
なお、以上のような今回評価が示す燃費の評価は、運転者の走行技術の向上によって車両の走行効率を変化させるための指針となる情報であれば良く、燃費の値を示す情報(例えば、単位区間内の平均値を示す情報)であっても良いし、基準の燃費と今回の燃費とを比較した結果を示す情報(例えば、基準燃費との相対関係を示す情報)であっても良いし、燃費を改善させるための運転操作の有無を評価する情報(例えば、燃費改善に寄与する運転操作の頻度を示す情報)であっても良い。むろん、過去評価についても同様に、燃費の評価は燃費を変化させるための指針となる情報であればよい。また、燃費は車両を単位距離走行させるための液体燃料の消費効率(単位距離当たりの消費量あるいは補給価格)であればよく、必ずしも内燃機関が駆動されている必要はない。すなわち、内燃機関が駆動されないEV走行を行えば、単位距離を電力を利用して走行することができ、内燃機関を駆動するための液体燃料を消費することがなく、この意味で燃費が良くなると言える。従って、今回評価や過去評価は、液体燃料の消費量のみの評価ではなく、電力の消費量の評価を含んでいても良いし、液体燃料と電力とのいずれかまたは双方の消費を抑制することで走行効率を向上させるような運転操作の有無を評価したものであってもよい。
【0023】
過去評価取得手段は、今回の走行よりも過去におけるハイブリッド車両の燃費の評価を単位区間毎に示す過去評価を取得することができればよい。すなわち、地図上での過去評価の表示対象区間について過去評価を取得することができればよい。具体的には、地図に表示されている今回よりも過去の走行区間のうち、今回評価と対比すべき区間を過去評価の表示対象区間とし、当該表示対象区間についての燃費の評価を単位区間毎に取得すればよい。ここで、過去評価の表示対象区間は、過去評価の情報が存在する区間の全てであっても良いし、一部であっても良い。すなわち、過去の燃費の評価を定常的に特定して記録媒体に記録する構成とし、地図に含まれる道路上の単位区間であって、過去の燃費の評価が記録媒体に記録されている全ての単位区間については過去評価アイコンを表示する構成としても良いし、過去の燃費の評価が記録媒体に記録されている単位区間から表示対象区間を選択して過去評価アイコンを表示しても良い。
【0024】
過去の燃費の評価が記録媒体に記録されている単位区間から表示対象区間を選択する構成の例として、今回の走行よりも過去に現在位置を含む区間を走行した場合のハイブリッド車両の燃費の評価を単位区間毎に示す過去評価を取得する構成としても良い。すなわち、現在位置を含む区間を過去評価アイコンの表示対象区間として過去評価を取得する。この構成によれば、現在位置以前の今回評価アイコンが地図上に表示されている状態において、現在位置を含む区間の過去評価アイコンが地図上に併せて表示される。現在位置を含む区間は、現在位置の直後に走行する道路を含むため、運転者は現在位置以後の過去評価を認識し、さらに、現在位置以前の今回評価を対比させながら運転を行うことが可能になる。
【0025】
さらに、ハイブリッド車両が出発地から目的地に向けて走行している場合において、出発地から現在位置までの区間についての今回評価を取得し、ハイブリッド車両が今回の走行よりも過去に出発地と同一の地点から出発し、目的地と同一の地点まで走行した場合における過去評価を取得する構成としても良い。すなわち、今回の走行と過去の走行とで出発地と目的地とが共通である場合に今回評価アイコンと過去評価アイコンとを表示する構成とする。この構成によれば、ある出発地から他の目的地に向けて今回走行する際に過去の走行に比べて総消費燃料を抑制するための指針を提供することが可能になる。
【0026】
また、出発地と目的地とは、運転者が明示的に指示した地点であっても良いし、ハイブリッド車両の動作状態に基づいて出発したと判定される地点や到着したと判定される地点を出発地や目的地とする構成を採用しても良い。さらに、今回の目的地を、例えば、今回の走行の経路や過去の走行履歴等に基づいて推定しても良い。
【0027】
さらに、ハイブリッド車両においては、バッテリが上限まで充電されている状態でHV走行を行っても回生エネルギーを回収できないため、走行効率が悪い。そこで、バッテリの充電状態を今回の走行および過去の走行について取得し、地図上に今回の走行および過去の走行においてバッテリが上限まで充電されていた位置を表示する構成としても良い。すなわち、過去の走行においてバッテリが上限まで充電されていた位置が表示されていれば、運転者は、当該位置に到達する前にEV走行を行うべきであるという指針を得ることができる。また、今回の走行においてバッテリが上限まで充電されていた位置が表示されていれば、運転者は、今回の走行においてEV走行を行うべき状態となった位置を把握することができ、当該位置以降でEV走行を行うべきであるという指針を得ることができる。
【0028】
さらに、本発明のように単位区間毎の評価を示す今回評価アイコンと過去評価アイコンとを表示する構成において、EV走行であることを示すEVアイコンとHV走行における燃費の評価を示すHVアイコンとを表示する手法は、プログラムや方法としても適用可能である。また、以上のようなシステム、プログラム、方法は、単独の装置として実現される場合や、複数の装置によって実現される場合、ハイブリッド車両に備えられる各部と共有の部品を利用して実現される場合が想定可能であり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーションシステムや方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、システムを制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0029】
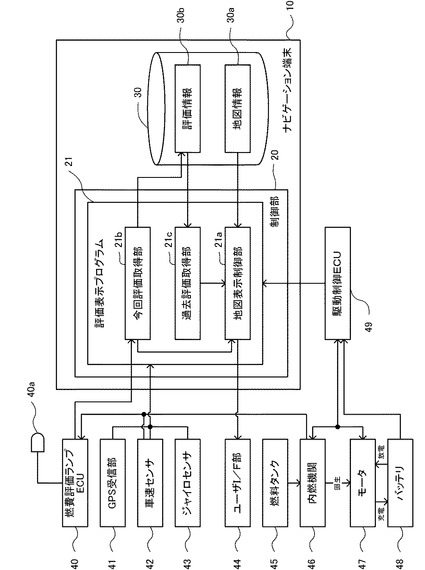
【図1】評価表示システムを含むナビゲーション端末を示すブロック図である。
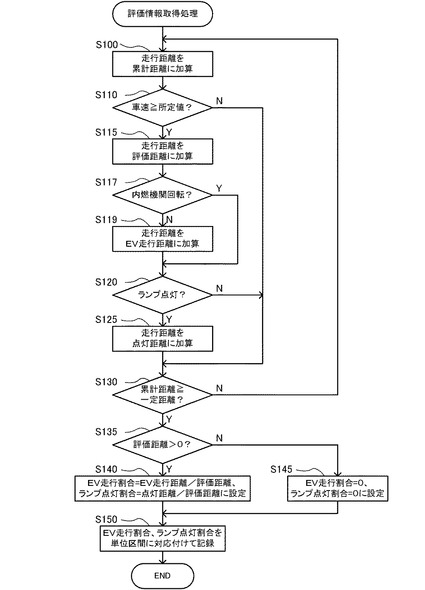
【図2】評価情報取得処理を示すフローチャートである。
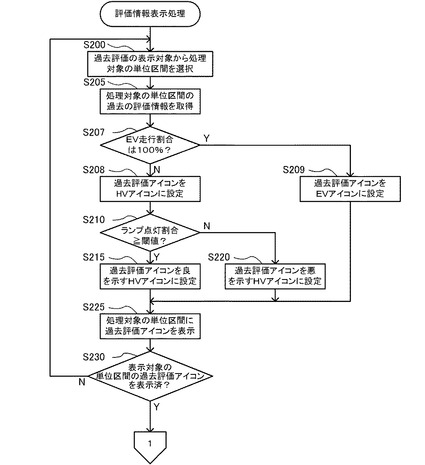
【図3】評価情報表示処理を示すフローチャートである。
【図4】評価情報表示処理を示すフローチャートである。
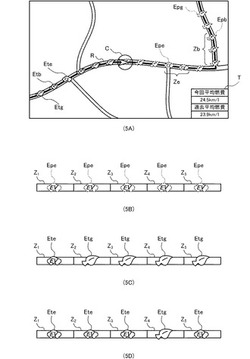
【図5】(5A)は表示される地図の例を示す図、(5B)(5C)(5D)は単位区間毎の評価の表示例を示す図である。
【図6】(6A)(6B)は単位区間毎の評価の表示例を示す図、(6C)は表示される地図の例を示す図である。
【発明を実施するための形態】
【0030】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション端末の構成:
(2)評価情報取得処理:
(3)評価情報表示処理:
(4)他の実施形態:
【0031】
(1)ナビゲーション端末の構成:
図1は、ハイブリッド車両に搭載された評価表示システムの構成を示すブロック図である。本実施形態において評価表示システムは、ナビゲーション端末10によって実現される。ナビゲーション端末10は、CPU、RAM、ROM等を備える制御部20を備えており、ROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムの一つとしてナビゲーションプログラムを実行可能である。当該ナビゲーションプログラムは、ナビゲーション端末の表示部にハイブリッド車両の現在位置が含まれる地図を表示して運転者を目的地まで案内する機能を制御部20に実現させるプログラムであり、表示部に今回評価アイコンと過去評価アイコンとを併せて表示する評価表示プログラム21が含まれている。
【0032】
本実施形態にかかるハイブリッド車両は、燃費評価ランプECU40とGPS受信部41と車速センサ42とジャイロセンサ43とユーザI/F部44と燃料タンク45と内燃機関46とモータ47とバッテリ48と駆動制御ECU49とを備えている。GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介してハイブリッド車両の現在位置を算出するための信号を示す信号を出力する。制御部20は、この信号を取得してハイブリッド車両の現在位置を取得する。車速センサ42は、ハイブリッド車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車速を取得する。ジャイロセンサ43は、ハイブリッド車両の水平面内の旋回についての角加速度を検出し、ハイブリッド車両の向きに対応した信号を出力する。制御部20は、この信号を取得してハイブリッド車両の進行方向を取得する。車速センサ42およびジャイロセンサ43等は、GPS受信部41の出力信号から特定されるハイブリッド車両の現在位置を補正するなどのために利用される。また、ハイブリッド車両の現在位置は、当該ハイブリッド車両の走行軌跡に基づいて適宜補正される。
【0033】
燃費評価ランプECU40は、ハイブリッド車両の動作に基づいて走行中のハイブリッド車両の燃費を評価するための制御回路を備えており、ハイブリッド車両のインストルメンタルパネルに備えられたランプ40aが接続されている。本実施形態において燃費評価ランプECU40は、車両が走行効率の良い動作状態で走行しているか否かを所定の条件に基づいて判定し、所定の条件に合致している場合にランプ40aを点灯させる。本実施形態においては、EV走行である場合と、HV走行において消費燃料が抑制される運転がなされている場合に走行効率の良い動作状態で走行していると見なされる。
【0034】
すなわち、燃費評価ランプECU40は、内燃機関の回転数を示す情報と車速センサ42の出力情報とに基づいて、内燃機関が回転していない状態で車両が走行しているか否かを判定し、内燃機関が回転していない状態で車両が走行している場合、EV走行であるとみなす。また、内燃機関が回転している状態で車両が走行している場合(HV走行の場合)、燃費評価ランプECU40は、消費燃料を示す情報(例えば、インジェクタを動作させるための信号から特定される情報や消費燃料センサが示す情報等)と車速センサ42の出力情報とトランスミッションの状態を示す情報との組み合わせが消費燃料を抑制する条件に合致している場合にHV走行において消費燃料が抑制される運転がなされているとみなす。なお、消費燃料が抑制される条件としては、種々の条件を定義可能であるが、本実施形態においては、消費燃料が所定量以下であり、かつ、車速が所定の閾値以上であり、かつ、トランスミッションの状態が通常の状態(スポーツモードなど高効率に加速するための状態ではないドライブモード等の状態)である場合に消費燃料を抑制する条件に合致しているとする。
【0035】
そして、燃費評価ランプECU40は、車両が走行効率の良い動作状態で走行している場合にランプ40aを点灯させる。この結果、運転者はランプ40aが点灯している場合に走行効率が良い(消費燃料が抑制される)運転を行っており、ランプ40aが消灯している場合に走行効率が悪い(消費燃料が過度に消費される)運転を行っていると判断することができる。また、燃費評価ランプECU40は、ランプ40aを点灯させる場合に制御部20に対してランプ40aが点灯していることを示す情報を出力する。従って、制御部20は、当該情報に基づいてランプ40aが点灯していることおよび消灯していることを特定することができる。さらに、燃費評価ランプECU40は、制御部20に対して上述の消費燃料を示す情報を出力する。制御部20は、当該消費燃料を示す情報に基づいてハイブリッド車両がHV走行をしている場合における位置毎の燃費(km/l)を特定することができる。
【0036】
ユーザI/F部44は、運転者の指示を入力し、また運転者に各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイからなる表示部やスイッチ等の入力部、スピーカ等の音声出力部を備えている。ユーザI/F部44は制御信号を制御部20から受信し、各種案内を行うための画像をタッチパネルディスプレイに表示する。
【0037】
さらに、本実施形態にかかる車両はハイブリッド車両であり、燃料タンク45に蓄積された液体燃料を動力源とする内燃機関46と、バッテリ48に蓄積された電力を動力源とするモータ47とを備えている。これらの内燃機関46とモータ47とは図示しない動力伝達機構に連結されており、当該動力伝達機構により回転駆動力を車両の推進力に変換することによってハイブリッド車両を駆動させる。また、内燃機関46によって発生した回転駆動力の一部を回生エネルギーとしてモータ47に伝達するように構成されており、この際にモータ47によって発電された電力はバッテリ48に蓄積される。
【0038】
内燃機関46とモータ47は、駆動制御ECU49に制御される。駆動制御ECU49は、内燃機関46とモータ47とに対して制御信号を出力可能であり、内燃機関46とモータ47とに対して制御信号を出力して内燃機関46とモータ47とのいずれかまたは双方が回転駆動力を発生させるように制御する。したがって、本実施形態においては、駆動制御ECU49が出力する制御信号によって内燃機関46の駆動や停止、モータ47による充電、バッテリ48の放電によるモータ47の駆動が選択される。また、駆動制御ECU49は、内燃機関46の回転数を取得して制御部20に通知する。さらに、駆動制御ECU49は、バッテリ48から残電力量[%](SOC:State Of Charge)を取得して制御部20に通知する。なお、バッテリ48の現在の残電力量は、残電力量に対応したバッテリ48に関する各種のパラメータによって取得することが可能であり、SOCの他、電圧、電流、電解質のpH等によって残電力量を特定してもよい。
【0039】
記録媒体30には地図情報30aが記録されている。地図情報30aは、ハイブリッド車両が走行する道路の端点に対応するノードの位置等を示すノードデータ、ノード間の道路の形状を特定するための形状補間点の位置等を示す形状補間点データ、ノード同士の連結を示すリンクデータ等を含んでいる。また、本実施形態においては、ハイブリッド車両が走行するたびにハイブリッド車両の燃費の評価を示す評価情報30bが記録される。当該評価情報30bは、単位区間内における燃費の評価区間内でEV走行をしていた割合(距離の割合)を示す情報と、単位区間内における燃費の評価対象区間内で上述のランプ40aが点灯していた割合を示す情報とによって構成される。なお、本実施形態において、目的地を設定して走行した状態で評価情報30bが記録される場合には、当該目的地と出発地とを示す情報が評価情報30bに対応付けられて記録される。
【0040】
制御部20は、ナビゲーションプログラムに含まれる評価表示プログラム21を実行することにより、ユーザI/F部44の表示部に今回評価アイコンと過去評価アイコンとを含む地図を表示する。また、本実施形態において、今回評価アイコンと過去評価アイコンとは、EVアイコンあるいはHVアイコンのいずれかによって表現される。この処理を実行するため、評価表示プログラム21は、地図表示制御部21aと今回評価取得部21bと過去評価取得部21cとを備えている。
【0041】
地図表示制御部21aは、ユーザI/F部44の表示部にハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示し、また、地図上に単位区間毎の今回評価アイコンと過去評価アイコンとを併せて表示する機能を制御部20に実現させるプログラムモジュールである。すなわち、制御部20は、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づいてハイブリッド車両の現在位置を特定し、ハイブリッド車両の現在位置周辺における地図の表示範囲を特定し、当該表示範囲内の道路や施設等の情報を地図情報30aから抽出する。そして、制御部20は、ハイブリッド車両の現在位置と当該現在位置の周辺における道路や施設等を示す地図を描画するための制御信号をユーザI/F部44の表示部に出力する。この結果、ユーザI/F部44の表示部は、ハイブリッド車両の現在位置の周辺における道路や施設等を示す地図と、ハイブリッド車両の現在位置を表示する。
【0042】
今回評価取得部21bは、ハイブリッド車両の今回の走行における燃費の評価を単位区間(本実施形態においては、一定距離(例えば100m)の区間)毎に示す今回評価を取得する機能を制御部20に実現させるプログラムモジュールである。なお、制御部20は、ハイブリッド車両が走行する過程において今回評価取得部21bにより後述する評価情報取得処理を実行し、単位区間毎のEV走行割合と単位区間毎のランプ40aの点灯割合とを取得し、当該単位区間毎のEV走行割合および点灯割合を評価情報30bとして記録する。当該評価情報30bからは今回評価と過去評価とが特定される。
【0043】
本実施形態においては、運転者がナビゲーションプログラムの機能により、ユーザI/F部44を操作して目的地を設定し、当該目的地を設定した時点でのハイブリッド車両の現在位置を出発地とし、当該出発地から目的地までの経路を探索して案内する。そして、現在において当該出発地から当該目的地まで走行している場合に、当該出発地から当該目的地までの走行を今回の走行とみなす。すなわち、今回走行した区間は、出発地が始点、現在位置が終点となる区間であり、ハイブリッド車両の進行とともにハイブリッド車両が目的地に到達するまで今回走行した区間の総距離が大きくなる。なお、目的地を設定した走行が行われ、ハイブリッド車両が目的地に到達した場合、制御部20は、評価情報30bを記録する際に、出発地から目的地まで走行するまでの各単位区間についての評価情報と当該出発地および当該目的地とを対応付けて記録する。
【0044】
そして、制御部20は、今回評価取得部21bの処理により、評価情報30bから、今回の走行に関する今回評価を特定する。このために、制御部20は、出発地においてハイブリッド車両の走行が開始された後、目的地に到達する以前においてハイブリッド車両が今回走行した区間における単位区間毎の評価情報30bを取得する。そして、制御部20は、評価情報30bが示す単位区間毎のEV走行割合が所定の割合(例えば100%,90%等)以上である場合、単位区間毎の評価を、EV走行によって単位区間内の評価区間を走行したことを示す評価とする。一方、評価情報30bが示す単位区間毎のEV走行割合が所定の割合以上でない場合、評価情報30bが示す単位区間毎のランプ40aの点灯割合(ランプ40aが点灯している状態で走行した距離の割合)を所定の閾値と比較し、所定の閾値以上である場合に燃費の評価を「良」、当該点灯割合が所定の閾値よりも小さい場合に燃費の評価を「悪」とし、単位区間毎の今回評価とする。すなわち、HV走行においては、ランプ40aの点灯割合が高いほど燃費が高くなるため、ランプ40aの点灯割合は燃費改善に寄与する運転操作の頻度に対応しており、当該点灯割合によって、燃費を改善させるための運転操作の有無を評価することができる。以上のように、本実施形態においてHV走行ににおける燃費の評価は「良」「悪」のいずれかとする。なお、所定の閾値は、燃費の評価を行う際に決定されていればよく、本実施形態においては、運転者が予め設定した診断難易度に応じて当該所定の閾値が設定される。すなわち、診断難易度が高いほど所定の閾値が大きくなるように設定される。
【0045】
さらに、本実施形態において制御部20は、今回評価取得部21bの処理により、今回の走行におけるハイブリッド車両の平均燃費を示す今回平均燃費を取得する。すなわち、目的地を設定した走行が行われた場合、制御部20は、評価情報30bを記録する際に、出発地から現在位置までの消費燃料を示す情報に基づいて位置毎のハイブリッド車両の燃費を特定し、平均化し、出発地と目的地との組み合わせに対して平均化した燃費を対応付けて記録する。そして、制御部20は、今回評価取得部21bの処理により、評価情報30bが示す平均化された燃費のうち、今回の走行に関する燃費を今回平均燃費として取得する。なお、評価情報30bに対応付けられる平均化された燃費の情報は、ハイブリッド車両の走行とともに逐次更新される。従って、ハイブリッド車両が目的地に到達する前においては、ハイブリッド車両が出発地から目的地よりも進行方向後方の地点まで走行する過程における平均化された燃費が出発地と目的地との組み合わせに対して対応付けられて記録される。一方、ハイブリッド車両が目的地に到達すると、ハイブリッド車両が出発地から目的地まで走行する過程における平均化された燃費が出発地と目的地との組み合わせに対して対応付けられて記録される。
【0046】
過去評価取得部21cは、今回の走行よりも過去におけるハイブリッド車両の燃費の評価を単位区間毎に示す過去評価を取得する機能を制御部20に実現させるプログラムモジュールである。本実施形態において制御部20は、ハイブリッド車両が今回の走行よりも過去に出発地と同一の地点から出発し、目的地と同一の地点まで走行した場合における一連の走行を過去評価アイコンの表示対象となる過去の走行と見なす。そして、制御部20は、過去の走行でハイブリッド車両が走行した区間の単位区間毎の評価を過去評価として取得する。
【0047】
このために、制御部20は、評価情報30bから上述の今回の走行と同一の出発地、目的地が対応付けられたEV走行割合を示す情報とランプ40aの点灯割合を示す情報とを取得する。なお、今回の走行と同一の出発地、目的地が対応付けられた情報が複数個記録されている場合、例えば、出発地と目的地とに対応付けられた平均化された燃費が最も良いもの(すなわち、過去において最高の平均燃費となったもの)を過去評価として取得する構成とすればよい。そして、制御部20は、評価情報30bが示す単位区間毎のEV走行割合が所定の割合以上である場合、単位区間毎の評価を、EV走行によって単位区間内の評価区間を走行したことを示す評価とする。一方、評価情報30bが示す単位区間毎のEV走行割合が所定の割合以上でない場合、評価情報30bが示すランプ40aの点灯割合と所定の閾値と比較し、所定の閾値以上である場合に燃費の評価を「良」、当該点灯割合が所定の閾値よりも小さい場合に燃費の評価を「悪」とする。なお、今回の走行と過去の走行とで出発地と目的地とが同一か否かを判定するためには、地点からの距離に所定のマージンを設け、例えば、距離が300m以内の2地点は同一と見なすような構成を採用可能である。
【0048】
さらに、本実施形態において制御部20は、過去評価取得部21cの処理により、過去の走行におけるハイブリッド車両の平均燃費を示す過去平均燃費を取得する。すなわち、制御部20は、過去評価取得部21cの処理により、評価情報30bを参照し、上述の今回の走行と同一の出発地、目的地が対応付けられた平均化された燃費の中から最高の燃費を抽出し過去平均燃費として取得する。なお、本実施形態における過去平均燃費は、出発地から目的地までの走行を1回の走行とし、1回毎に平均燃費を特定しておき、過去の1回以上の走行の中から最高の燃費を抽出して表示する構成であるが、むろん、複数回の過去の走行の燃費を平均化した値を過去平均燃費としても良い。
【0049】
以上のようにして今回評価と過去評価と今回平均燃費と過去平均燃費とが取得されると、制御部20は、地図表示制御部21aの処理により、今回評価アイコンと過去評価アイコンと今回平均燃費と過去平均燃費とを地図上に描画するための制御信号をユーザI/F部44の表示部に出力する。なお、今回評価アイコンと過去評価アイコンとを表示するために、制御部20は、ユーザI/F部44の表示部に現在表示されている地図から、今回の走行によって走行した区間と過去の走行によって走行した区間とを抽出する。そして、制御部20は、各区間における単位区間毎の今回評価と過去評価とを特定し、各評価を示す今回評価アイコンと過去評価アイコンとを特定し、当該今回評価アイコンと当該過去評価アイコンとを地図上に描画するための制御信号をユーザI/F部44の表示部に出力する。この結果、ユーザI/F部44の表示部は、単位区間毎の今回評価アイコンと過去評価アイコンと今回平均燃費と過去平均燃費とを表示する。
【0050】
本実施形態において、アイコンは、今回評価と過去評価とを対比可能なアイコンであるとともに、EV走行とHV走行とを対比可能なアイコンである。本実施形態においては、アイコンの外周を実線で表現することによってそのアイコンが今回の走行に関する評価を示していると認識できるように構成している。また、アイコンの外周を破線で表現することによってそのアイコンが過去の走行に関する評価を示していると認識できるように構成している。一方、アイコンの外周の形状を、車を模した形状で表現するとともに内側に「EV」という文字を付して表現することによってそのアイコンがEV走行を示していると認識できるように構成している。また、アイコンの外周の形状を、葉を模した形状で表現することによってそのアイコンがHV走行を示していると認識できるように構成している。なお、HV走行を示すアイコンにおいては、葉の内側の着色(本実施形態では白抜きとハッチング)によって燃費の「良」「悪」を示すように構成されている。
【0051】
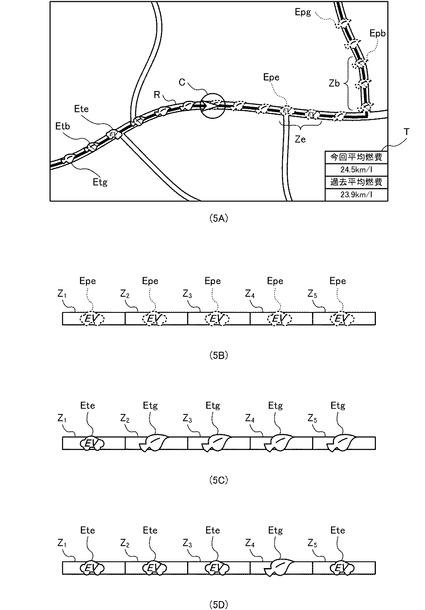
図5Aは、表示部に表示される地図の例を示しており、本例においては、実線の曲線によって示された道路R上にハイブリッド車両の現在位置を示すアイコンCが表示されている。図5Aにおいては、アイコンCよりも前方の道路上に外周が破線で表現された過去評価アイコンEpe,Epg,Epbが表示された状態を示している。なお、過去評価アイコンEpeは外周が車を模した形状であり、過去の走行においてEV走行された単位区間を示している。従って、アイコンEpeは、過去評価アイコンであるとともにEV走行したことを示すEVアイコンでもある。過去評価アイコンEpg,Epbは、外周が葉を模した形状でありため、過去の走行においてHV走行された単位区間を示している。そして、過去評価アイコンEpg,Epbのうち、白抜きの着色がされた過去評価アイコンEpgが「良」評価である単位区間、ハッチングで示す着色がされた過去評価アイコンEpbが「悪」評価である単位区間を示している。
【0052】
一方、アイコンCよりも後方の道路上に外周が実線で表現された今回評価アイコンEte,Etg,Etbが表示された状態を示している。今回評価アイコンEteは外周が車を模した形状であり、今回の走行においてEV走行された単位区間を示している。従って、アイコンEteは、今回評価アイコンであるとともにEV走行したことを示すEVアイコンでもある。今回評価アイコンEtg,Etbは、外周が葉を模した形状であり、今回の走行においてHV走行された単位区間を示している。そして、今回評価アイコンEtg,Etbのうち、白抜きの着色がされた今回評価アイコンEtgが「良」評価である単位区間、ハッチングで示す着色がされた今回評価アイコンEtbが「悪」評価である単位区間を示している。従って、アイコンEtg,Etbは、今回評価アイコンであるとともにHV走行したことを示すHVアイコンでもある。また、図5Aに示す例においては、表示部に表示される地図の右下に矩形の領域が設けられており、今回平均燃費(図においては24.5km/l)と過去平均燃費(図においては23.9km/l)とが表示されている。なお、道路R上に記された太い線は今回の走行において出発地から目的地まで到達するための走行予定経路を示している。
【0053】
以上のように、本実施形態によれば、ユーザI/F部44の表示部に表示された地図に、今回評価アイコンと過去評価アイコンとが同時に視認できるように表示される。この結果、運転者は今回の走行区間における燃費の評価と過去の燃費の評価とを運転中に容易に比較しながら運転を行うことができる。なお、本実施形態においては、今回評価と、過去評価とを区別できるように今回評価アイコンと過去評価アイコンとを異なる態様(図5Aに示す例では実線と破線)で地図に表示している。従って、運転者は、今回評価と過去評価とを混同することなく明確に区別することが可能になる。また、本実施形態においては、EV走行とHV走行とを区別できるようにEVアイコンとHVアイコンとを異なる態様(図5Aに示す例では外周形状が車と葉)で地図に表示している。従って、運転者は、EV走行とHV走行とを混同することなく明確に区別することが可能になる。
【0054】
ここで、今回評価と過去評価とは単位区間毎に定義され、今回においても過去においても通常は、複数の単位区間を走行するため、地図上においては複数の連続する単位区間について今回評価アイコンと過去評価アイコンとが表示されることになる。そして、今回評価アイコンおよび過去評価アイコンが複数の単位区間に渡って地図上に表示されると、運転者は今回および過去の各単位区間における走行がEV走行とHV走行とのいずれであったのかを認識することが可能になる。また、運転者は、HV走行であった場合には、燃費の良し悪しを複数の単位区間に渡って認識することが可能になる。さらに、運転者は今回の走行において走行済の複数の単位区間に渡るEV走行とHV走行との比率から、今回の走行にてEV走行をすることができた単位区間の比率の多寡を把握することができる。そして、過去の走行と今回の走行とにおけるEV走行の多寡によってできるだけ長期間EV走行を継続するための指針を得ることが可能である。
【0055】
例えば、図5Bにおいては、単位区間Z1〜Z5に対応する過去評価アイコンがEVアイコンEpeであった場合の例を示しており、この例において運転者は単位区間Z1〜Z5における過去の走行がEV走行であったことを認識することができる。一方、図5C,図5Dに示すように単位区間Z1〜Z5のいずれかにおいて今回評価アイコンがHVアイコンEtgとなった単位区間が存在する場合、当該単位区間において過去にEV走行できたにもかかわらず今回HV走行をしてしまった原因として、以下の2要因が考えられる。
要因1:今回の走行においてはEV走行をすることができないSOCであった
要因2:今回の走行における運転操作が非効率な運転となるような運転操作であった(例えば、過度にアクセル操作をした)
【0056】
そして、図5Bに示すように過去の走行において複数の単位区間Z1〜Z5にて連続的にEV走行をすることができ、図5Cに示すように今回の走行において複数の単位区間Z2〜Z5にて連続的にEV走行をすることができなかった場合、評価悪化の原因は要因1であると推定することができる。すなわち、過去に複数の単位区間Z1〜Z5に渡って連続的にEV走行できた場合には運転者にとって当該複数の単位区間Z1〜Z5においてEV走行を行うことが容易であると推定され、このような複数の単位区間Z1〜Z5で今回連続的にEV走行できないのであれば、運転者の技術によってEV走行できなかったのではなく、バッテリ48のSOCが低下してEV走行ができない状態であったと推定する方が妥当である。従って、今回の走行における単位区間Z2〜Z5についての評価を次回以降の運転操作の指針としないように判断することができる。なお、過去の走行においてEV走行をすることができた単位区間であって今回の走行においてEV走行をすることができなかった単位区間が連続する場合(例えば、図5Bおよび図5Cに示す単位区間Z2〜Z5の評価が連続する場合)にも、評価悪化の原因は要因1であると推定することができる。
【0057】
一方、図5Bに示すように複数の単位区間Z1〜Z5にて過去の走行において連続的にEV走行をすることができ、当該複数の単位区間Z1〜Z5についての今回の走行でEV走行をできなかった単位区間が離散的に現れる場合、評価悪化の原因は要因2であると推定することができる。すなわち、図5Cに示すように過去の走行において単位区間Z4の前後に渡る複数の単位区間Z1〜Z5にてEV走行でき、図5Dに示すように今回の走行において単位区間Z1〜Z3,Z5にてEV走行できたにもかかわらず、単位区間Z4においてEV走行できなかった場合、単位区間Z4においてSOCがEV走行をすることができない状態となる確率は低い。従って、単位区間Z4において運転者自身が効率的に運転を行うように心がけることにより、EV走行で走行する単位区間の数を増やすことが可能になる。
【0058】
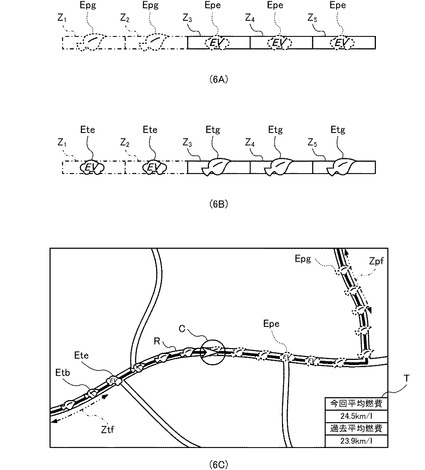
さらに、燃費を向上させるためにEV走行を行うことが良いとされる単位区間でEV走行を行うようにするための指針を得ることも可能である。図6A,6Bは、一点鎖線で示す単位区間Z1,Z2が上りであり、実線で示す単位区間Z3〜Z5が下りである例を示している。本実施形態にかかるハイブリッド車両においては、回生エネルギーによって発電された電力をバッテリ48に蓄積する回生ブレーキを利用することが可能である。そして、回生ブレーキは主に下りで利用されるため、上りの後に下りが続く道路においては、上りの区間でEV走行をし、下りの区間でHV走行を行うことで、下りの区間で回生ブレーキによってバッテリ48に電力を充電することが好ましい。
【0059】
そこで、例えば、図6Aに示すように、過去の走行において上りの単位区間Z1,Z2でHV走行を行い下りの単位区間Z3〜Z5でEV走行を行った場合、運転者はこれらの単位区間Z1〜Z5における過去の走行は理想的な走行ではないと認識することができる。また、運転者は、単位区間Z1,Z2でEV走行を行い下りの単位区間Z3〜Z5でHV走行を行うべきであるという指針を得ることができる。そして、今回の走行において、図6Bに示すように単位区間Z1,Z2でEV走行、下りの単位区間Z3〜Z5でHV走行を行った場合には、実際に運転者が今回の走行において理想的な走行をしたと確認することができる。
【0060】
さらに、今回評価アイコンがHVアイコンである場合、運転者は走行済の複数の単位区間に渡る燃費の評価の良し悪しから、走行済の複数の単位区間において総燃料消費量が抑制されている傾向であるのか、過総燃料消費量が多い傾向であるのかを把握することができる。例えば、図5Aに示す例においては、実線のハッチが付されたアイコンEtbが少なければ総燃料消費量が抑制されており、多ければ総燃料消費量が多い傾向であると把握することができる。
【0061】
一方、過去評価アイコンがHVアイコンである場合、運転者は複数の単位区間に渡る過去評価を認識することが可能になる。そして、運転者は複数の単位区間に渡る燃費の評価の良し悪しから、総燃料消費量が抑制されている傾向であるのか、総燃料消費量が多い傾向であるのかを把握することができる。従って、総燃料消費量が抑制されている傾向であった区間においては、自身が再度同一区間を走行する際に燃料消費を抑制しながら運転することが容易であると推定することができる。また、総燃料消費量が多い傾向であった区間においては、燃費の改善の余地があると推定することができる。すなわち、過去に走行した区間の燃費の評価に基づいて当該区間での走行の指針を決定することができる。例えば、図5Aに示す例においては、現在位置C以降において、区間Zb以外の区間においては総燃料消費量が抑制されている傾向にあり、運転者は自身が再度同一区間を走行する際に燃料消費を抑制しながら運転することが容易であると推定することができる。また、区間Zbにおいては総燃料消費量が多い傾向にあり、運転者は燃費の改善の余地があると推定することができる。
【0062】
そして、本発明においては、地図上に単位区間毎の今回評価アイコンと過去評価アイコンとが併せて表示されるため、運転者は複数の単位区間に渡る今回評価と過去評価とを運転中に対比しながら運転を行うことができる。一般に、車両の走行過程において運転者が表示部を凝視することはできず、運転者は表示部に表示された情報を断続的に視認することができるに過ぎない。そして、運転者が現在位置を走行している瞬間における燃費の評価を断続的に認識して過去の評価と比較したとしても、走行開始から終了までの過程で燃料の消費量を抑制できるか否かを判断することは困難である。
【0063】
しかし、本実施形態においては、単位区間毎の今回評価アイコンと過去評価アイコンとを併せて地図に表示し、運転者は複数の単位区間についての今回評価と過去評価とを一覧して把握することができる。従って、運転者が現在位置以降に走行し得る単位区間における過去評価と今回評価を対比することにより、今回の走行における総燃料消費量の程度に応じて過去に走行した区間の指針を決定しながら運転を行うことが可能になる。例えば、図5Aに示す例によれば、運転者は地図を一覧するのみで今回評価がEV走行できたことを示す評価であるEteである割合と今回評価が「良」であるEtgの割合と今回評価が「悪」であるEtbの割合とを把握することができる。従って、Ete,Etg,Etbの割合によって現在位置までの今回の走行において総燃料消費量が比較的多いのか、少ないのかを認識することが可能である。
【0064】
また、運転者は地図を一覧するのみで過去評価がEV走行できたことを示す評価であるEpeである割合と過去評価が「良」であるEpgの割合と過去評価が「悪」であるEpbの割合とを把握することができる。従って、Epe,Epg,Epbの割合によって現在位置以降の区間の過去の走行において、総燃料消費量が比較的多かった区間と比較的少なかった区間とを把握することができる。例えば、図5Aに示す例においては、総燃料消費量が比較的多かった区間Zbや燃料消費量が極めて少なかった区間Zeを即座に視認することができる。そして、例えば、今回の走行における総燃料消費量が比較的多く、運転者が今後の走行で燃料消費量を抑制したいと考える場合、過去の走行で総燃料消費量が多い傾向であった区間において、アクセル開度を抑えて走行すれば燃費を改善できると推定することができる。また、過去の走行で総燃料消費量が抑制されている傾向であった区間においては、過度に慎重な運転をしなくても燃料消費を抑制可能であると推定することができる。
【0065】
なお、今回の走行と過去の走行とで出発地と目的地とが同一の場合、通常は、ナビゲーションプログラムによって同一の経路が探索される。今回の走行と過去の走行とが同一の経路であった場合、図5Aに示すように、今回の走行に関する今回評価アイコンEte,Etg,Etbは出発地から現在位置までの経路について表示される。過去の走行に関する過去評価アイコンEpe,Epg,Epbは、少なくとも、現在位置から目的地までの経路について表示される。この場合、過去評価アイコンEpe,Epg,Epbは、今回の走行よりも過去に現在位置Cを含む区間を走行した場合のハイブリッド車両の燃費の評価となる。過去評価アイコンEpe,Epg,Epbの表示対象となる現在位置を含む区間は、図5Aに示すように現在位置Cの直後に走行する道路を含むため、運転者は現在位置以後の過去評価アイコンEpe,Epg,Epbを認識し、さらに、現在位置以前の今回評価アイコンEte,Etg,Etbを対比させながら運転を行うことが可能になる。従って、本実施形態によれば、ある出発地から他の目的地に向けて今回走行する際に、過去の走行に比べて総消費燃料を抑制するための指針を運転者が決定しながら運転を行うことが可能である。
【0066】
さらに、本実施形態においては、ユーザI/F部44の表示部において、単位区間毎の燃費の評価に加え、複数の単位区間に渡る燃費の評価である今回平均燃費と、過去平均燃費とを表示する(図5Aにおいては右下の矩形領域Tに表示)。従って、運転者は、単位区間毎の今回評価と過去評価に加え、複数の単位区間に渡る評価である今回平均燃費と過去平均燃費とを認識することができ、より容易に今回の総消費燃料と過去の総消費燃料とを判定することができる。
【0067】
(2)評価情報取得処理:
次に、評価情報取得処理について詳細に説明する。図2は、評価情報取得処理のフローチャートであり、本実施形態において制御部20は、目的地を設定した走行が開始された後に今回評価取得部21bによって評価情報取得処理を実行する。評価情報取得処理が実行される前に制御部20は、ハイブリッド車両が単位区間の長さとして定義された一定距離を走行したか否かを判定するための累計距離と、単位区間内で燃費の評価を行うことが可能であった距離を特定するための評価距離と、EV走行の距離を特定するためのEV走行距離と、ランプ40aが点灯した状態で走行した距離を特定するための点灯距離とを示す変数を初期化する。
【0068】
制御部20は、走行距離を累計距離に加算する(ステップS100)。本実施形態において、ステップS100〜S130はループ処理となっており、ループ処理が繰り返される場合には一定の期間(例えば、100ms)毎にステップS100の処理が行われる。そこで、制御部20は、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて、前回ステップS100が実行されてから今回ステップS100が実行されるまでの間にハイブリッド車両が走行した走行距離ΔLを特定し、累計距離に加算する。すなわち、制御部20は、ステップS100〜S130が繰り返されている間にハイブリッド車両が走行した総距離を示す値が累計距離となるように加算処理を行う。
【0069】
次に、制御部20は、車速が所定値以上であるか否かを判定し(ステップS110)、車速が所定値以上であると判定されない場合にはステップS115〜S125をスキップする。一方、ステップS110にて、車速が所定値以上であると判定された場合、制御部20は、走行距離を評価距離に加算する(ステップS115)。すなわち、ステップS100にて累計距離に加算された上述の走行距離ΔLを評価距離に加算する。
【0070】
ここで、ステップS110の判定における判定条件となる所定値は、所定値よりも小さい車速である場合に有意な燃費の評価が行えなくなるような車速の値(例えば4km/h)として予め定義されていればよい。すなわち、車速が過度に低速である場合、消費燃料を抑制した運転と過度に燃料を消費した運転とを区別して運転操作をすることが困難であるため、所定値よりも小さい車速である場合には燃費の評価を行わないようにする。このために、本実施形態においては、車速が所定値よりも小さい場合、有意な燃費の評価を行えないと見なしてステップS115を実行しないが、車速が所定値以上であれば有意な燃費の評価を行えると見なしてステップS115にて評価距離をΔLだけ増加させることになる。なお、当該所定値は、燃費評価ランプECU40がランプ40aを点灯させる際の条件の一つとして車速について設定されている所定の閾値と同一であっても良い。
【0071】
さらに、制御部20は、駆動制御ECU49の出力信号に基づいて内燃機関46が回転しているか否かを判定し(ステップS117)、内燃機関46が回転していると判定される場合にはステップS119をスキップする。一方、ステップS117にて、内燃機関46が回転していると判定された場合、制御部20は、走行距離をEV走行距離に加算する(ステップS119)。すなわち、有意な燃費の評価を行うことが可能な状態であり、かつ、内燃機関が回転していない場合に、制御部20は、ハイブリッド車両がEV走行をしているとみなし、ステップS100にて累計距離に加算された上述の走行距離ΔLをEV走行距離に加算する。
【0072】
さらに、制御部20は、ランプ40aが点灯しているか否かを判定し(ステップS120)、ランプ40aが点灯していると判定されない場合にはステップS125をスキップする。一方、ステップS120にて、ランプ40aが点灯していると判定された場合、制御部20は、走行距離を点灯距離に加算する(ステップS125)。すなわち、有意な燃費の評価を行うことが可能な状態であり、かつ、ランプ40aが点灯している場合に、制御部20は、ステップS100にて累計距離に加算された上述の走行距離ΔLを評価距離に加算する。
【0073】
次に、制御部20は、累計距離が一定距離以上になったか否かを判定し(ステップS130)、ステップS130にて累計距離が一定距離以上になったと判定されるまでステップS100以降の処理を繰り返す。すなわち、制御部20は、累計距離が、単位区間の距離として予め定義された一定距離以上になった場合に、ハイブリッド車両が単位区間を走行したと見なしてステップS100〜S130のループ処理を抜けることになる。
【0074】
ステップS130にて、累計距離が一定距離以上になったと判定された場合、制御部20は、評価距離が0より大きいか否かを判定する(ステップS135)。すなわち、ハイブリッド車両が単位区間を走行する過程において有意な評価を行える区間が存在したか否かを判定する。ステップS135にて、評価距離が0より大きいと判定された場合、制御部20は、EV走行割合をEV走行距離/評価距離に設定し、ランプ40aの点灯割合を点灯距離/評価距離に設定する(ステップS140)。一方、ステップS135にて、評価距離が0より大きいと判定されない場合、制御部20は、EV走行割合を0に設定し、ランプ40aの点灯割合を0に設定する(ステップS145)。すなわち、点灯割合を評価するための分母が0である場合には点灯割合の定義から点灯割合を算出できないため0とする。むろん、ここでは、評価不能などとすることも可能である。
【0075】
次に、制御部20は、ステップS140あるいはS145にて設定したEV走行割合、ランプ40aの点灯割合を累計距離の計測対象となった単位区間に対応付けて評価情報30bとして記録媒体30に記録する(ステップS150)。以上の処理によれば、単位区間毎の評価情報30bを記録媒体30に記録することができる。なお、ハイブリッド車両の目的地が設定された状態で評価情報取得処理が実行された場合、制御部20は、ステップS150において、目的地と出発地とを示す情報を評価情報30bに対応付けて記録する。
【0076】
(3)評価情報表示処理:
次に、評価情報表示処理について詳細に説明する。図3および図4は、評価情報表示処理のフローチャートであり、本実施形態においては、運転者によって目的地が設定され、今回の走行の出発地および目的地と同一の出発地および目的地であった過去の走行についての評価情報30bが存在する場合に当該評価情報表示処理が実行される。また、制御部20は、ユーザI/F部44の表示部において所定の期間毎に地図表示を更新しており、当該更新のたびに当該評価情報表示処理が実行される。さらに、当該評価情報表示処理が実行される前には予め上述の診断難易度が運転者の指示あるいはデフォルト値によって特定されている。
【0077】
ステップS200〜S230は過去評価を地図上に表示するためのループ処理であり、制御部20は、地図表示制御部21aおよび過去評価取得部21cの処理により、まず、過去評価の表示対象から処理対象の単位区間を選択する(ステップS200)。すなわち、制御部20は、地図表示制御部21aの処理により、ユーザI/F部44の表示部に表示されている地図の範囲を特定する。さらに、制御部20は、過去評価取得部21cの処理により、今回の走行における出発地および目的地と同一の出発地および目的地が対応付けられた評価情報30bから、出発地と目的地とに対応付けられた平均化された燃費が最も良いものを抽出する。さらに、制御部20は、地図表示制御部21aの処理により、抽出された評価情報30bに対応付けられた単位区間からユーザI/F部44の表示部に表示されている地図の範囲に含まれる単位区間を表示対象として特定する。そして、表示対象の単位区間の中から過去評価アイコンを表示する処理を行っていない単位区間を処理対象の単位区間として選択する。
【0078】
次に、制御部20は、過去評価取得部21cの処理により、処理対象の単位区間の過去の評価情報30bを取得する(ステップS205)。すなわち、処理対象の単位区間の過去の走行におけるEV走行割合およびランプ40aの点灯割合を取得する。次に、制御部20は、過去評価取得部21cの処理により、処理対象の単位区間の過去の走行におけるEV走行割合が100%であるか否かを判定する(ステップS207)。そして、ステップS207において、EV走行割合が100%であると判定されない場合、過去評価アイコンをHVアイコンに設定し(ステップS208)、EV走行割合が100%であると判定された場合、過去評価アイコンをEVアイコンに設定する(ステップS209)。
【0079】
本実施形態において、EVアイコンとしての過去評価アイコンは1種類であるため、ステップS209が実行されると過去評価アイコンは確定される。例えば、図5Aに示す例においては、処理対象の単位区間の過去評価アイコンがアイコンEpeとされる。一方、本実施形態において、HVアイコンとしての過去評価アイコンは2種類であるため、ステップS208が実行されると過去評価アイコンはアイコンEpg,Epbのいずれかになる。
【0080】
そこで、制御部20は、さらに、過去評価取得部21cの処理により、処理対象の単位区間の過去の走行におけるランプ40aの点灯割合が所定の閾値以上であるか否かを判定する(ステップS210)。ステップS210でランプ40aの点灯割合が所定の閾値以上であると判定された場合、制御部20は、過去評価取得部21cの処理により、処理対象の単位区間の過去評価アイコンを、「良」を示すHVアイコンに設定する(ステップS215)。例えば、図5Aに示す例では過去評価アイコンがアイコンEpgに設定される。また、ステップS210でランプ40aの点灯割合が所定の閾値以上であると判定されない場合、制御部20は、過去評価取得部21cの処理により、処理対象の単位区間の過去評価アイコンを、「悪」を示すHVアイコンに設定する(ステップS220)。例えば、図5Aに示す例では過去評価アイコンがアイコンEpbに設定される。なお、ランプ40aの点灯割合と比較される所定の閾値は上述の診断難易度に応じて設定され、診断難易度が高いほど大きい値となる。従って、診断難易度が高いほど、過去評価が「良」とされにくくなる。
【0081】
次に、制御部20は、地図表示制御部21aの処理により、処理対象の単位区間に過去評価アイコンを表示する(ステップS225)。すなわち、制御部20は、ステップS209,S215,S220のいずれかで設定された過去評価アイコンを処理対象の単位区間に描画するための信号をユーザI/F部44の表示部に対して出力する。この結果、ユーザI/F部44の表示部は、処理対象の単位区間に過去評価アイコンを表示する。
【0082】
次に、制御部20は、地図表示制御部21aの処理により、表示対象の単位区間の過去評価アイコンを表示済であるか否かを判定する(ステップS230)。すなわち、制御部20は、ステップS200にて特定された表示対象の単位区間の全てについて過去評価アイコンを表示したか否かを判定する。ステップS230にて、表示対象の単位区間の過去評価アイコンを表示済であると判定されない場合、ステップS200以降の処理を繰り返す。一方、ステップS230にて表示対象の単位区間の過去評価アイコンを表示済であると判定された場合、ステップS235以降で今回評価アイコンを表示するための処理を行う。表示対象の単位区間の過去評価アイコンを表示した時点では、図5Aに示す実線のアイコンEte,Etg,Etb(今回評価を示すアイコン)は表示されておらず、破線で示すアイコンEpe,Epg,Epb(過去評価を示すアイコン)が表示された状態となる。なお、今回の走行と過去の走行とで経路が同一である場合、ハイブリッド車両の現在位置よりも後方の単位区間においても過去評価アイコンが表示されるが、ステップS235以降の処理によって同一の単位区間上に今回評価アイコンが表示される場合には、今回評価アイコンが優先的に表示される。
【0083】
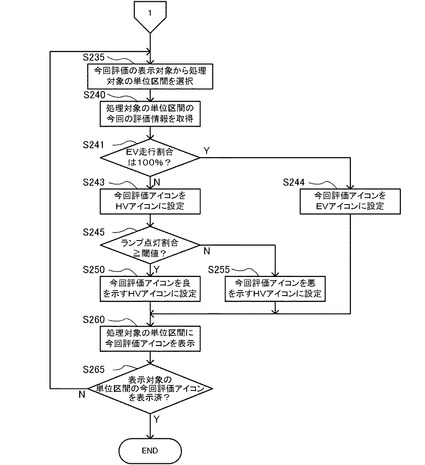
ステップS235〜S265は今回評価アイコンを地図上に表示するためのループ処理であり、制御部20は、地図表示制御部21aおよび今回評価取得部21bの処理により、まず、今回評価アイコンの表示対象から処理対象の単位区間を選択する(ステップS235)。すなわち、制御部20は、地図表示制御部21aの処理により、ユーザI/F部44の表示部に表示されている地図の範囲を特定する。さらに、制御部20は、今回評価取得部21bの処理により、今回の走行の過程で記録媒体に記録された評価情報30bに対応付けられた単位区間からユーザI/F部44の表示部に表示されている地図の範囲に含まれる単位区間を表示対象として特定する。そして、表示対象の単位区間の中から今回評価アイコンを表示する処理を行っていない単位区間を処理対象の単位区間として選択する。
【0084】
次に、制御部20は、今回評価取得部21bの処理により、処理対象の単位区間の今回の評価情報を取得する(ステップS240)。すなわち、処理対象の単位区間の今回の走行におけるEV走行割合およびランプ40aの点灯割合を取得する。次に、制御部20は、今回評価取得部21bの処理により、処理対象の単位区間の今回の走行におけるEV走行割合が100%であるか否かを判定する(ステップS241)。そして、ステップS241において、EV走行割合が100%であると判定されない場合、今回評価アイコンをHVアイコンに設定し(ステップS243)、EV走行割合が100%であると判定された場合、今回評価アイコンをEVアイコンに設定する(ステップS244)。過去評価アイコンと同様に、ステップS244が実行されると今回評価アイコンは確定される。例えば、図5Aに示す例においては、処理対象の単位区間の今回評価アイコンがアイコンEteとされる。一方、本実施形態において、ステップS243が実行されると今回評価アイコンはアイコンEtg,Etbのいずれかになる。
【0085】
そこで、制御部20は、さらに、今回評価取得部21bの処理により、処理対象の単位区間の今回の走行におけるランプ40aの点灯割合が所定の閾値以上であるか否かを判定する(ステップS245)。ステップS245でランプ40aの点灯割合が所定の閾値以上であると判定された場合、制御部20は、今回評価取得部21bの処理により、処理対象の単位区間の今回評価アイコンを、「良」を示すHVアイコンに設定する(ステップS250)。例えば、図5Aに示す例では今回評価アイコンがアイコンEtgに設定される。また、ステップS245でランプ40aの点灯割合が所定の閾値以上であると判定されない場合、制御部20は、今回評価取得部21bの処理により、処理対象の単位区間の今回評価アイコンを、「悪」を示すHVアイコンに設定する(ステップS255)。例えば、図5Aに示す例では今回評価アイコンがアイコンEtbに設定される。なお、ランプ40aの点灯割合と比較される所定の閾値はステップS210における所定の閾値と同一である。
【0086】
次に、制御部20は、地図表示制御部21aの処理により、処理対象の単位区間に今回評価アイコンを表示する(ステップS260)。すなわち、制御部20は、ステップS244,S250,S255のいずれかで設定された今回評価アイコンを処理対象の単位区間に描画するための信号をユーザI/F部44の表示部に対して出力する。この結果、ユーザI/F部44の表示部は、処理対象の単位区間に今回評価アイコンを表示する。
【0087】
次に、制御部20は、地図表示制御部21aの処理により、表示対象の単位区間の今回評価アイコンを表示済であるか否かを判定する(ステップS265)。すなわち、制御部20は、ステップS235にて特定された表示対象の単位区間の全てについて今回評価アイコンを表示したか否かを判定する。ステップS265にて、表示対象の単位区間の今回評価アイコンを表示済であると判定されない場合、ステップS235以降の処理を繰り返す。一方、ステップS265にて表示対象の単位区間の今回評価アイコンを表示済であると判定されると、制御部20は、評価情報表示処理を終了する。本実施形態において、同一の単位区間上に過去評価アイコンと今回評価アイコンとが表示される場合には、今回評価アイコンが優先的に表示されるため、表示対象の単位区間の今回評価アイコンが表示されると、図5Aに示す例のように、ハイブリッド車両の現在位置以前にハイブリッド車両が走行した区間には実線で今回評価のアイコンEte,Etg,Etbが表示される。また、ステップS235〜S265の処理においてはハイブリッド車両の現在位置よりも前方の区間に今回評価アイコンは表示されないため、当該ハイブリッド車両の現在位置よりも前方の区間においては破線で過去評価のアイコンEpe,Epg,Epbが表示される。
【0088】
(4)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、単位区間毎の評価を示す今回評価アイコンと過去評価アイコンとを表示する構成において、EV走行であることを示すEVアイコンとHV走行における燃費の評価を示すHVアイコンとを表示する限りにおいて、他にも種々の実施形態を採用可能である。例えば、今回評価や過去評価は、ハイブリッド車両に搭載されていない装置、例えば、情報管理センターから取得しても良い。むろん、ナビゲーション端末10は、ハイブリッド車両に固定的に搭載されていても良いし、持ち運び可能なナビゲーション端末10がハイブリッド車両内に持ち込まれて利用される態様であっても良い。
【0089】
さらに、燃費の評価は、複数の要素の組み合わせに対する条件によって評価されても良いし、単一の要素(例えば、燃費の値)に対する条件によって評価されても良い。さらに、燃費の評価は、燃費を変化させるための指針となる情報であれば良く、燃費の値を示す情報(例えば、単位区間内の平均値を示す情報)であっても良いし、基準の燃費と今回の燃費とを比較した結果を示す情報(例えば、基準燃費との相対関係を示す情報)であっても良い。
【0090】
さらに、出発地や目的地は、上述の構成のように運転者が明示的に目的地を指示した時点で決定される構成の他、種々の構成を採用可能である。例えば、ハイブリッド車両の動作状態に基づいてハイブリッド車両が出発したと判定される地点や到着したと判定される地点を出発地や目的地とする構成を採用しても良い。さらに、今回の目的地を、例えば、今回の走行の経路や過去の走行履歴等に基づいて推定しても良い。
【0091】
さらに、上述の実施形態においては、今回の走行における出発地および目的地と同一の出発地から同一の目的地まで過去に走行した場合にその走行区間を過去評価アイコンの表示対象としたが、他の規則によって過去評価アイコンの表示対象区間を決定しても良い。すなわち、地図に表示されている今回よりも過去の走行区間のうち、今回評価と対比すべき区間を過去評価アイコンの表示対象区間とし、当該表示対象区間についての単位区間毎の燃費の評価を過去評価とすればよい。そして、過去評価アイコンの表示対象区間は、過去評価の情報が存在する区間の全てであっても良いし、一部であっても良い。例えば、現在位置周辺において、過去評価を特定可能な情報がある単位区間の全てあるいは一部の区間における過去評価アイコンを表示する構成としても良い。この構成において、現在位置までの今回の走行において総燃料消費量が多く、運転者が今後の走行で燃料消費量を抑制したいと考える場合、過去の走行で総燃料消費量が抑制されている傾向であった区間を走行するように経路を選択すれば、燃料消費を抑制可能であると推定することができる。
【0092】
同様に、出発地から目的地までの走行を今回の走行とする構成以外にも、種々の態様によって今回の走行を定義することができる。すなわち、今回の走行区間の始点は特に限定されず、現在位置まで連続的に走行した場合において当該連続的な走行の開始地点を今回の走行区間の始点としても良いし、走行日が異なるなど非連続な走行が行われた場合において現在位置よりも前にハイブリッド車両が存在した地点を区間の始点としても良い。すなわち、今回の走行と今回の走行よりも過去の走行とが区別されて対比できるように今回の走行区間が定義されていればよい。
【0093】
より具体的には、例えば、ハイブリッド車両の動力源(内燃機関46やモータ47)が起動された後、動力源が停止されることなく現在位置に到達した場合に、動力源が起動された位置から現在位置までの区間についての今回評価を取得し、ハイブリッド車両の動力源が起動された時点より前における過去評価を取得する構成としても良い。すなわち、現在に最も近い過去の時点での動力源の起動から現在位置までの連続的な走行を今回の走行と見なして今回評価を取得し、当該今回の走行よりも過去の走行についての評価は過去評価とする。この構成は、例えば、図1に示す構成において、ハイブリッド車両の動力源が最も最近起動された時点以後に取得された評価情報30bに基づいて今回評価を特定し、当該時点より前に取得された評価情報30bに基づいて過去評価を特定することによって実現可能である。この構成によれば、運転者が運転を開始するたびにそれ以前の走行に対して燃費が改善した否かを判定することが可能になる。
【0094】
さらに、利用者に指定された時点以後の走行によってハイブリッド車両が現在位置に到達した場合に、利用者に指定された時点におけるハイブリッド車両の位置から現在位置までの区間についての今回評価を取得し、利用者に指定された時点より前における過去評価を取得する構成としても良い。すなわち、利用者が指定した時点以前の評価と、当該時点より前の評価とが対比できるように構成される。この構成は、例えば、図1に示す構成において、利用者に指定された時点以後に取得された評価情報30bに基づいて今回評価を特定し、当該時点より前に取得された評価情報30bに基づいて過去評価を特定することによって実現可能である。この構成によれば、利用者が指定した時点での走行に比べて燃費が改善したか否かを判定することが可能になる。
【0095】
さらに、単位区間は、燃費に関する評価の結論を導くための区間であればよく、一定距離の区間を単位区間とする構成の他、所定の規則によって決められた区間を単位区間としても良い。例えば、地図情報が示す最も近いノード同士を端点とする一つのリンクを一つの単位区間とする構成等を採用可能である。さらに、今回評価アイコンを表示する対象となる単位区間と過去評価アイコンを表示する対象となる単位区間とは、一致していても良いし異なっていても良い。すなわち、単位区間が共通の規則で決められていればよく、表示対象の単位区間は適宜選択されて良い。
【0096】
さらに、ハイブリッド車両においては、バッテリ48が上限まで充電されている状態でHV走行を行っても回生エネルギーを回収できないため、走行効率が悪い。そこで、ハイブリッド車両の走行過程において、制御部20が、駆動制御ECU49の出力信号に基づいてバッテリ48のSOCを取得して記録媒体30に記録する構成としてもよい。そして、当該記録媒体に記録されたSOCに基づいて制御部20が今回の走行および過去の走行におけるSOCを特定し、地図上に今回の走行および過去の走行においてバッテリ48が上限まで充電されていた位置を表示する構成としても良い。例えば、図6Cにおいて二点鎖線で示す区間Ztf,Zpfのように、バッテリ48が上限まで充電されていた位置を表示する構成等を採用可能である。このような構成によれば、運転者は、過去の走行においてバッテリ48が上限まで充電されていた区間Zpfに、今回の走行においてハイブリッド車両が到達する前にEV走行を行うべきであるという指針を得ることができる。また、今回の走行においてバッテリ48が上限まで充電されていた区間Ztfが表示されていれば、運転者は、今回の走行において区間Ztf以降でEV走行を行うべきであるという指針を得ることができる。
【符号の説明】
【0097】
10…ナビゲーション端末、20…制御部、21…評価表示プログラム、21a…地図表示制御部、21b…今回評価取得部、21c…過去評価取得部、30…記録媒体、30a…地図情報、30b…評価情報、40…燃費評価ランプECU、40a…ランプ、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…ユーザI/F部、45…燃料タンク、46…内燃機関、47…モータ、48…バッテリ、49…駆動制御ECU
【技術分野】
【0001】
本発明は、車両の燃費の評価を表示する評価表示システム、方法およびプログラムに関する。
【背景技術】
【0002】
従来、車両の燃費を改善させるための表示を行う各種の技術が開発されている。例えば、特許文献1においては、今回走行した経路内の場所に関連づけて自車のエネルギー消費量が基準値を超過したことを表示する技術が開示されている。また、特許文献2においては、今回の燃費と過去の燃費の平均とを区間毎に比較可能な情報を表示する技術が開示されている。さらに、特許文献3においては、過去の走行における燃費の評価(良、中間、悪等)を地図上にて地点または路線毎に表示し、車両の現在位置における現在の燃費の評価を併せて表示する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−33447号公報
【特許文献2】特開2004−251786号公報
【特許文献3】特開2002−350152号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来技術においては、今回の走行における燃費の評価と過去の走行における燃費の評価とに基づいて有意な比較をすることが困難であった。特に、ハイブリッド車両において高い走行効率を実現するための情報を得ることはできなかった。すなわち、特許文献1,2に開示された技術においては、今回の走行における燃費を基準値や過去の平均値と比較しており、これらの技術では今回の走行における燃費を評価しているものの、過去の走行における燃費の評価は示されない。従って、車両の運転者が、運転中に過去の走行における燃費の評価と今回の走行における燃費の評価とを対比することができず、現在位置以降の運転を改善することによって今回の走行における燃料消費を抑制する余地があるのか否かを判定することができない。
【0005】
また、特許文献3に開示された技術においては、過去の走行における燃費の評価が地点毎に表示されるものの、今回の走行における燃費の評価は現在位置における瞬間値が表示されるのみである。そして、消費燃料を抑制するために運転中に運転者が継続的に瞬間値に留意することは事実上不可能であり、今回の燃費が継続的に良好であったのか否かを判断できない。従って、特許文献3においても、運転中に過去の走行における燃費の評価と今回の走行における燃費の評価とを対比することができず、現在位置以前の今回の走行での消費燃料を考慮した上で現在位置以降の運転に改善余地があるのか否かを判定することは事実上不可能である。従って、従来、今回の走行中に運転を改善して消費燃料を抑制することは極めて困難であった。
【0006】
さらに、上述の従来技術においては、ハイブリッド車両の動作状態を示す表示を行っていない。すなわち、ハイブリッド車両においては、内燃機関の駆動が許可されるHV走行と、内燃機関の駆動が停止されてモータによって走行するEV走行とによって走行を行うことが可能であり、単位距離を走行するための液体燃料を補給するコストよりも単位距離を走行するための電力を補給するコストの方が低コストである現在においては、EV走行を行った方が単位距離を走行するための車両の走行効率が高い。そして、一般的なハイブリッド車両においては、運転技術が向上すると同一の区間であってもHV走行における燃費が徐々に良い燃費となり、さらに運転技術が向上するとHV走行ではなくEV走行によって走行することが可能になる。一方、EV走行を行うためには、車両のバッテリがEV走行を行うために充分なSOC(State Of Charge)となっていなければならない。従来技術のような表示では、このような状況を勘案してハイブリッド車両の運転者が運転技術を向上することはできない。
本発明は、前記課題にかんがみてなされたもので、ハイブリッド車両の運転者が自信の運転技術を向上させるための情報を案内する技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記の目的を達成するため、本発明においては、ハイブリッド車両の現在位置が表示されている地図上の単位区間毎に、ハイブリッド車両の今回の走行における燃費の評価を示す今回評価アイコンと、今回の走行よりも過去におけるハイブリッド車両の燃費の評価を示す過去評価アイコンとを、併せて表示する。さらに、今回評価アイコンおよび過去評価アイコンは、EVアイコンとHVアイコンとのいずれかで表現される。そして、EVアイコンは、ハイブリッド車両がEV走行によって単位区間内の評価区間を走行したことを示すアイコンであり、HVアイコンはハイブリッド車両がHV走行によって単位区間内の評価区間を走行した場合の燃費の評価を示すアイコンである。
【0008】
すなわち、今回評価アイコンと過去評価アイコンとが同時に視認されるように地図上に各アイコンを表示する。この結果、運転者は今回の走行区間における燃費の評価と過去の燃費の評価とを運転中に容易に比較しながら運転を行うことができる。さらに、各アイコンは、EVアイコンあるいはHVアイコンであるため、運転者は単位区間内の評価区間がEV走行によって走行されたのか、HV走行によって走行されたのかを判定することができる。
【0009】
ここで、今回評価は単位区間毎の燃費の評価である。このため、ハイブリッド車両の走行が進んで今回の走行における走行済の区間が地図上の複数の単位区間に渡る区間となれば、今回評価アイコンが複数の単位区間に渡って地図上に表示される。そして、HVアイコンで今回評価が示される場合、その評価は燃費の良し悪しを示す。一方、EVアイコンで今回評価が示される場合、内燃機関を使用せず、モータで走行することで内燃機関を駆動するための燃料を消費しない状態であることを示す。従って、運転者は今回の各単位区間における走行がEV走行とHV走行とのいずれであったのかを認識することが可能になる。また、HV走行であった場合、運転者は、燃費の良し悪しを複数の単位区間に渡って認識することが可能になる。さらに、運転者は今回の走行において走行済の複数の単位区間に渡るEV走行とHV走行との比率から、今回の走行にてEV走行をすることができた単位区間の比率の多寡を把握することができる。また、運転者は今回の走行においてHV走行にて走行した複数の単位区間に渡る燃費の評価の良し悪しから、今回の走行においてHV走行にて走行した区間において総燃料消費量が抑制されている傾向であるのか、総燃料消費量が多い傾向であるのかを把握することができる。
【0010】
一方、過去評価も単位区間毎の燃費の評価である。ハイブリッド車両において過去に単位区間の一つのみを走行したという状況は事実上想定し得ないため、過去評価アイコンも複数の単位区間に渡って地図上に表示される。従って、運転者は複数の単位区間に渡る過去評価を認識することが可能になる。そして、過去評価アイコンもEVアイコン、HVアイコンのいずれかで表現されるため、運転者は過去の各単位区間における走行がEV走行とHV走行とのいずれであったのか、また、HV走行であった場合には、燃費の良し悪しを複数の単位区間に渡って認識することが可能になる。さらに、運転者は過去の走行において走行済の複数の単位区間に渡るEV走行とHV走行との比率から、過去の走行においてEV走行をすることができた単位区間の比率の多寡を把握することができる。従って、過去の走行においてEV走行をすることができた単位区間の比率が多い場合には、過去の走行において液体燃料の燃料消費を抑制しながら運転することができたと推定することができる。
【0011】
また、過去の走行と今回の走行とにおけるEV走行の多寡によって、できるだけ長期間EV走行を継続するための指針を得ることが可能である。例えば、過去の走行においてEV走行をすることができ、今回の走行においてEV走行をすることができなかった(HV走行となった)単位区間が存在する場合、例えば、以下の2要因が原因となりえる。
要因1:今回の走行においてはEV走行をすることができないSOCであった
要因2:今回の走行における運転操作が非効率な運転となるような運転操作であった(例えば、過度にアクセル操作をした)
【0012】
そこで、過去の走行において複数の単位区間にて連続的にEV走行をすることができ、今回の走行において当該複数の単位区間内で連続的にEV走行をすることができなかった場合や、過去の走行においてEV走行をすることができた単位区間であって今回の走行においてEV走行をすることができなかった単位区間が連続する場合、評価悪化の原因は要因1であると推定することができる。すなわち、過去に複数の単位区間に渡って連続的にEV走行できた場合には運転者にとって当該複数の単位区間においてEV走行を行うことが容易であると推定され、このような複数の単位区間で今回連続的にEV走行できないのであれば、運転者の技術によってEV走行できなかったのではなく、バッテリのSOCが低下してEV走行ができない状態であったと推定する方が妥当である。従って、今回の走行においてEV走行をすることができなかった複数の単位区間についての評価を次回以降の運転操作の指針としないように判断することができる。
【0013】
一方、複数の単位区間にて過去の走行において連続的にEV走行をすることができ、当該複数の単位区間についての今回の走行でEV走行をできなかった単位区間が離散的に現れる場合、評価悪化の原因は要因2であると推定することができる。すなわち、バッテリのSOCは走行とともに徐々に変化するため、SOCの状態が単位区間毎に繰り返して大きく変化する確率は低い。従って、今回の走行でEV走行することができなかった単位区間において運転者自身が効率的に運転を行うように心がけることにより、EV走行で走行する単位区間の数を増やすことが可能になる。
【0014】
さらに、運転者は過去の走行においてHV走行にて走行した複数の単位区間に渡る燃費の評価の良し悪しから、過去の走行におけるHV走行で総燃料消費量が抑制されている傾向であったのか、総燃料消費量が多い傾向であったのかを把握することができる。従って、過去の走行におけるHV走行で総燃料消費量が抑制されている傾向であった区間においては、自身が再度同一区間を走行する際に燃料消費を抑制しながら運転することが容易であると推定することができる。また、過去の走行において総燃料消費量が多い傾向であった区間においては、燃費の改善の余地があると推定することができる。すなわち、過去に走行した区間の燃費の評価に基づいて当該区間での走行の指針を決定することができる。
【0015】
そして、本発明においては、地図上に単位区間毎の今回評価アイコンと過去評価アイコンとが併せて表示されるため、運転者は複数の単位区間に渡る今回評価と過去評価とを運転中に対比しながら運転を行うことができる。一般に、ハイブリッド車両の走行過程において運転者が表示部を凝視することはできず、運転者は表示部に表示された情報を断続的に視認することができるに過ぎない。そして、運転者が現在位置を走行している瞬間における燃費の評価を断続的に認識して過去の評価と比較したとしても、走行開始から終了までの過程で燃料の消費量を抑制できるか否かを判断することは困難である。
【0016】
しかし、本発明においては、単位区間毎の今回評価アイコンと過去評価アイコンとを併せて地図に表示するため、運転者は複数の単位区間についての今回評価アイコンと過去評価アイコンとを一覧して把握することができる。従って、運転者が現在位置以降に走行し得る単位区間における過去評価と今回評価を対比することにより、今回の走行における総燃料消費量の程度に応じて過去に走行した区間の指針を決定しながら運転を行うことが可能になる。例えば、現在位置以降の区間における過去評価が表示されている状態において、現在位置までの今回の走行において総燃料消費量が多く、運転者が今後の走行で燃料消費量を抑制したいと考える場合、過去の走行で総燃料消費量が多い傾向であった区間において、アクセル開度を抑えて走行すれば燃費を改善できると推定することができる。また、過去の走行で総燃料消費量が抑制されている傾向であった区間においては、過度に慎重な運転をしなくても燃料消費を抑制可能であると推定することができる。
【0017】
さらに、現在位置周辺の区間における過去評価が表示されている状態において、現在位置までの今回の走行において総燃料消費量が多く、運転者が今後の走行で燃料消費量を抑制したいと考える場合、過去の走行で総燃料消費量が抑制されている傾向であった区間を走行するように経路を選択すれば、燃料消費を抑制可能であると推定することができる。
【0018】
さらに、今回走行した区間と過去に走行した区間とが一致している場合、すなわち、過去評価アイコンが表示されていた区間をハイブリッド車両にて走行した場合、同一の単位区間における過去評価と今回評価とを対比することができる。この場合に運転者は、過去評価に比べて今回評価がどのように変化したのかを認識することができる。従って、運転者は今回走行した区間において総燃料消費量が過去に比べて改善しているのか否かを把握しながら運転をすることができる。
【0019】
ここで、地図表示制御手段は、表示部にハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示し、また、地図上に単位区間毎の今回評価アイコンと過去評価アイコンとを併せて表示することができればよい。すなわち、表示部に、ハイブリッド車両の現在位置の周辺における道路や施設等を示す地図と、ハイブリッド車両の現在位置を示す情報と、今回評価アイコンと過去評価アイコンとを表示することができればよい。なお、本発明においては地図上の単位区間毎に今回評価アイコンと過去評価アイコンとが表示されるように構成される。ここで、今回評価と過去評価とは単位区間毎に定義され、今回においても過去においても通常は、複数の単位区間を走行するため、地図上においては複数の連続する単位区間における今回評価アイコンと過去評価アイコンとが表示されることになる。
【0020】
また、単位区間は、燃費に関する評価の結論を導くための区間であればよく、一定距離の区間を単位区間としても良いし、所定の規則によって決められた区間を単位区間としても良い。後者としては、例えば、地図情報が示す最も近いノード同士を端点とする一つのリンクを一つの単位区間とする構成等を採用可能である。さらに、今回評価アイコンを表示する対象となる単位区間と過去評価アイコンを表示する対象となる単位区間とは、一致していても良いし異なっていても良い。すなわち、単位区間が共通の規則で決められていればよく、表示対象の単位区間は適宜選択されて良い。
【0021】
今回評価取得手段は、ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得することができればよい。すなわち、現在位置を終点とする今回の走行区間のうち、少なくとも地図に表示されている区間についての今回評価を単位区間毎に取得すればよい。ここで、今回の走行区間は現在位置が終点となる区間であり、ハイブリッド車両の進行とともに区間の総距離が大きくなる。また、今回の走行区間の始点は特に限定されず、現在位置まで連続的に走行した場合において当該連続的な走行の開始地点を今回の走行区間の始点としても良いし、走行日が異なるなど非連続な走行が行われた場合において現在位置に到達する前にハイブリッド車両が存在した地点を区間の始点としても良い。すなわち、今回の走行と今回の走行よりも過去の走行とが区別されて対比できるように今回の走行区間が定義されていればよい。
【0022】
なお、以上のような今回評価が示す燃費の評価は、運転者の走行技術の向上によって車両の走行効率を変化させるための指針となる情報であれば良く、燃費の値を示す情報(例えば、単位区間内の平均値を示す情報)であっても良いし、基準の燃費と今回の燃費とを比較した結果を示す情報(例えば、基準燃費との相対関係を示す情報)であっても良いし、燃費を改善させるための運転操作の有無を評価する情報(例えば、燃費改善に寄与する運転操作の頻度を示す情報)であっても良い。むろん、過去評価についても同様に、燃費の評価は燃費を変化させるための指針となる情報であればよい。また、燃費は車両を単位距離走行させるための液体燃料の消費効率(単位距離当たりの消費量あるいは補給価格)であればよく、必ずしも内燃機関が駆動されている必要はない。すなわち、内燃機関が駆動されないEV走行を行えば、単位距離を電力を利用して走行することができ、内燃機関を駆動するための液体燃料を消費することがなく、この意味で燃費が良くなると言える。従って、今回評価や過去評価は、液体燃料の消費量のみの評価ではなく、電力の消費量の評価を含んでいても良いし、液体燃料と電力とのいずれかまたは双方の消費を抑制することで走行効率を向上させるような運転操作の有無を評価したものであってもよい。
【0023】
過去評価取得手段は、今回の走行よりも過去におけるハイブリッド車両の燃費の評価を単位区間毎に示す過去評価を取得することができればよい。すなわち、地図上での過去評価の表示対象区間について過去評価を取得することができればよい。具体的には、地図に表示されている今回よりも過去の走行区間のうち、今回評価と対比すべき区間を過去評価の表示対象区間とし、当該表示対象区間についての燃費の評価を単位区間毎に取得すればよい。ここで、過去評価の表示対象区間は、過去評価の情報が存在する区間の全てであっても良いし、一部であっても良い。すなわち、過去の燃費の評価を定常的に特定して記録媒体に記録する構成とし、地図に含まれる道路上の単位区間であって、過去の燃費の評価が記録媒体に記録されている全ての単位区間については過去評価アイコンを表示する構成としても良いし、過去の燃費の評価が記録媒体に記録されている単位区間から表示対象区間を選択して過去評価アイコンを表示しても良い。
【0024】
過去の燃費の評価が記録媒体に記録されている単位区間から表示対象区間を選択する構成の例として、今回の走行よりも過去に現在位置を含む区間を走行した場合のハイブリッド車両の燃費の評価を単位区間毎に示す過去評価を取得する構成としても良い。すなわち、現在位置を含む区間を過去評価アイコンの表示対象区間として過去評価を取得する。この構成によれば、現在位置以前の今回評価アイコンが地図上に表示されている状態において、現在位置を含む区間の過去評価アイコンが地図上に併せて表示される。現在位置を含む区間は、現在位置の直後に走行する道路を含むため、運転者は現在位置以後の過去評価を認識し、さらに、現在位置以前の今回評価を対比させながら運転を行うことが可能になる。
【0025】
さらに、ハイブリッド車両が出発地から目的地に向けて走行している場合において、出発地から現在位置までの区間についての今回評価を取得し、ハイブリッド車両が今回の走行よりも過去に出発地と同一の地点から出発し、目的地と同一の地点まで走行した場合における過去評価を取得する構成としても良い。すなわち、今回の走行と過去の走行とで出発地と目的地とが共通である場合に今回評価アイコンと過去評価アイコンとを表示する構成とする。この構成によれば、ある出発地から他の目的地に向けて今回走行する際に過去の走行に比べて総消費燃料を抑制するための指針を提供することが可能になる。
【0026】
また、出発地と目的地とは、運転者が明示的に指示した地点であっても良いし、ハイブリッド車両の動作状態に基づいて出発したと判定される地点や到着したと判定される地点を出発地や目的地とする構成を採用しても良い。さらに、今回の目的地を、例えば、今回の走行の経路や過去の走行履歴等に基づいて推定しても良い。
【0027】
さらに、ハイブリッド車両においては、バッテリが上限まで充電されている状態でHV走行を行っても回生エネルギーを回収できないため、走行効率が悪い。そこで、バッテリの充電状態を今回の走行および過去の走行について取得し、地図上に今回の走行および過去の走行においてバッテリが上限まで充電されていた位置を表示する構成としても良い。すなわち、過去の走行においてバッテリが上限まで充電されていた位置が表示されていれば、運転者は、当該位置に到達する前にEV走行を行うべきであるという指針を得ることができる。また、今回の走行においてバッテリが上限まで充電されていた位置が表示されていれば、運転者は、今回の走行においてEV走行を行うべき状態となった位置を把握することができ、当該位置以降でEV走行を行うべきであるという指針を得ることができる。
【0028】
さらに、本発明のように単位区間毎の評価を示す今回評価アイコンと過去評価アイコンとを表示する構成において、EV走行であることを示すEVアイコンとHV走行における燃費の評価を示すHVアイコンとを表示する手法は、プログラムや方法としても適用可能である。また、以上のようなシステム、プログラム、方法は、単独の装置として実現される場合や、複数の装置によって実現される場合、ハイブリッド車両に備えられる各部と共有の部品を利用して実現される場合が想定可能であり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーションシステムや方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、システムを制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0029】
【図1】評価表示システムを含むナビゲーション端末を示すブロック図である。
【図2】評価情報取得処理を示すフローチャートである。
【図3】評価情報表示処理を示すフローチャートである。
【図4】評価情報表示処理を示すフローチャートである。
【図5】(5A)は表示される地図の例を示す図、(5B)(5C)(5D)は単位区間毎の評価の表示例を示す図である。
【図6】(6A)(6B)は単位区間毎の評価の表示例を示す図、(6C)は表示される地図の例を示す図である。
【発明を実施するための形態】
【0030】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション端末の構成:
(2)評価情報取得処理:
(3)評価情報表示処理:
(4)他の実施形態:
【0031】
(1)ナビゲーション端末の構成:
図1は、ハイブリッド車両に搭載された評価表示システムの構成を示すブロック図である。本実施形態において評価表示システムは、ナビゲーション端末10によって実現される。ナビゲーション端末10は、CPU、RAM、ROM等を備える制御部20を備えており、ROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムの一つとしてナビゲーションプログラムを実行可能である。当該ナビゲーションプログラムは、ナビゲーション端末の表示部にハイブリッド車両の現在位置が含まれる地図を表示して運転者を目的地まで案内する機能を制御部20に実現させるプログラムであり、表示部に今回評価アイコンと過去評価アイコンとを併せて表示する評価表示プログラム21が含まれている。
【0032】
本実施形態にかかるハイブリッド車両は、燃費評価ランプECU40とGPS受信部41と車速センサ42とジャイロセンサ43とユーザI/F部44と燃料タンク45と内燃機関46とモータ47とバッテリ48と駆動制御ECU49とを備えている。GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介してハイブリッド車両の現在位置を算出するための信号を示す信号を出力する。制御部20は、この信号を取得してハイブリッド車両の現在位置を取得する。車速センサ42は、ハイブリッド車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車速を取得する。ジャイロセンサ43は、ハイブリッド車両の水平面内の旋回についての角加速度を検出し、ハイブリッド車両の向きに対応した信号を出力する。制御部20は、この信号を取得してハイブリッド車両の進行方向を取得する。車速センサ42およびジャイロセンサ43等は、GPS受信部41の出力信号から特定されるハイブリッド車両の現在位置を補正するなどのために利用される。また、ハイブリッド車両の現在位置は、当該ハイブリッド車両の走行軌跡に基づいて適宜補正される。
【0033】
燃費評価ランプECU40は、ハイブリッド車両の動作に基づいて走行中のハイブリッド車両の燃費を評価するための制御回路を備えており、ハイブリッド車両のインストルメンタルパネルに備えられたランプ40aが接続されている。本実施形態において燃費評価ランプECU40は、車両が走行効率の良い動作状態で走行しているか否かを所定の条件に基づいて判定し、所定の条件に合致している場合にランプ40aを点灯させる。本実施形態においては、EV走行である場合と、HV走行において消費燃料が抑制される運転がなされている場合に走行効率の良い動作状態で走行していると見なされる。
【0034】
すなわち、燃費評価ランプECU40は、内燃機関の回転数を示す情報と車速センサ42の出力情報とに基づいて、内燃機関が回転していない状態で車両が走行しているか否かを判定し、内燃機関が回転していない状態で車両が走行している場合、EV走行であるとみなす。また、内燃機関が回転している状態で車両が走行している場合(HV走行の場合)、燃費評価ランプECU40は、消費燃料を示す情報(例えば、インジェクタを動作させるための信号から特定される情報や消費燃料センサが示す情報等)と車速センサ42の出力情報とトランスミッションの状態を示す情報との組み合わせが消費燃料を抑制する条件に合致している場合にHV走行において消費燃料が抑制される運転がなされているとみなす。なお、消費燃料が抑制される条件としては、種々の条件を定義可能であるが、本実施形態においては、消費燃料が所定量以下であり、かつ、車速が所定の閾値以上であり、かつ、トランスミッションの状態が通常の状態(スポーツモードなど高効率に加速するための状態ではないドライブモード等の状態)である場合に消費燃料を抑制する条件に合致しているとする。
【0035】
そして、燃費評価ランプECU40は、車両が走行効率の良い動作状態で走行している場合にランプ40aを点灯させる。この結果、運転者はランプ40aが点灯している場合に走行効率が良い(消費燃料が抑制される)運転を行っており、ランプ40aが消灯している場合に走行効率が悪い(消費燃料が過度に消費される)運転を行っていると判断することができる。また、燃費評価ランプECU40は、ランプ40aを点灯させる場合に制御部20に対してランプ40aが点灯していることを示す情報を出力する。従って、制御部20は、当該情報に基づいてランプ40aが点灯していることおよび消灯していることを特定することができる。さらに、燃費評価ランプECU40は、制御部20に対して上述の消費燃料を示す情報を出力する。制御部20は、当該消費燃料を示す情報に基づいてハイブリッド車両がHV走行をしている場合における位置毎の燃費(km/l)を特定することができる。
【0036】
ユーザI/F部44は、運転者の指示を入力し、また運転者に各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイからなる表示部やスイッチ等の入力部、スピーカ等の音声出力部を備えている。ユーザI/F部44は制御信号を制御部20から受信し、各種案内を行うための画像をタッチパネルディスプレイに表示する。
【0037】
さらに、本実施形態にかかる車両はハイブリッド車両であり、燃料タンク45に蓄積された液体燃料を動力源とする内燃機関46と、バッテリ48に蓄積された電力を動力源とするモータ47とを備えている。これらの内燃機関46とモータ47とは図示しない動力伝達機構に連結されており、当該動力伝達機構により回転駆動力を車両の推進力に変換することによってハイブリッド車両を駆動させる。また、内燃機関46によって発生した回転駆動力の一部を回生エネルギーとしてモータ47に伝達するように構成されており、この際にモータ47によって発電された電力はバッテリ48に蓄積される。
【0038】
内燃機関46とモータ47は、駆動制御ECU49に制御される。駆動制御ECU49は、内燃機関46とモータ47とに対して制御信号を出力可能であり、内燃機関46とモータ47とに対して制御信号を出力して内燃機関46とモータ47とのいずれかまたは双方が回転駆動力を発生させるように制御する。したがって、本実施形態においては、駆動制御ECU49が出力する制御信号によって内燃機関46の駆動や停止、モータ47による充電、バッテリ48の放電によるモータ47の駆動が選択される。また、駆動制御ECU49は、内燃機関46の回転数を取得して制御部20に通知する。さらに、駆動制御ECU49は、バッテリ48から残電力量[%](SOC:State Of Charge)を取得して制御部20に通知する。なお、バッテリ48の現在の残電力量は、残電力量に対応したバッテリ48に関する各種のパラメータによって取得することが可能であり、SOCの他、電圧、電流、電解質のpH等によって残電力量を特定してもよい。
【0039】
記録媒体30には地図情報30aが記録されている。地図情報30aは、ハイブリッド車両が走行する道路の端点に対応するノードの位置等を示すノードデータ、ノード間の道路の形状を特定するための形状補間点の位置等を示す形状補間点データ、ノード同士の連結を示すリンクデータ等を含んでいる。また、本実施形態においては、ハイブリッド車両が走行するたびにハイブリッド車両の燃費の評価を示す評価情報30bが記録される。当該評価情報30bは、単位区間内における燃費の評価区間内でEV走行をしていた割合(距離の割合)を示す情報と、単位区間内における燃費の評価対象区間内で上述のランプ40aが点灯していた割合を示す情報とによって構成される。なお、本実施形態において、目的地を設定して走行した状態で評価情報30bが記録される場合には、当該目的地と出発地とを示す情報が評価情報30bに対応付けられて記録される。
【0040】
制御部20は、ナビゲーションプログラムに含まれる評価表示プログラム21を実行することにより、ユーザI/F部44の表示部に今回評価アイコンと過去評価アイコンとを含む地図を表示する。また、本実施形態において、今回評価アイコンと過去評価アイコンとは、EVアイコンあるいはHVアイコンのいずれかによって表現される。この処理を実行するため、評価表示プログラム21は、地図表示制御部21aと今回評価取得部21bと過去評価取得部21cとを備えている。
【0041】
地図表示制御部21aは、ユーザI/F部44の表示部にハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示し、また、地図上に単位区間毎の今回評価アイコンと過去評価アイコンとを併せて表示する機能を制御部20に実現させるプログラムモジュールである。すなわち、制御部20は、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づいてハイブリッド車両の現在位置を特定し、ハイブリッド車両の現在位置周辺における地図の表示範囲を特定し、当該表示範囲内の道路や施設等の情報を地図情報30aから抽出する。そして、制御部20は、ハイブリッド車両の現在位置と当該現在位置の周辺における道路や施設等を示す地図を描画するための制御信号をユーザI/F部44の表示部に出力する。この結果、ユーザI/F部44の表示部は、ハイブリッド車両の現在位置の周辺における道路や施設等を示す地図と、ハイブリッド車両の現在位置を表示する。
【0042】
今回評価取得部21bは、ハイブリッド車両の今回の走行における燃費の評価を単位区間(本実施形態においては、一定距離(例えば100m)の区間)毎に示す今回評価を取得する機能を制御部20に実現させるプログラムモジュールである。なお、制御部20は、ハイブリッド車両が走行する過程において今回評価取得部21bにより後述する評価情報取得処理を実行し、単位区間毎のEV走行割合と単位区間毎のランプ40aの点灯割合とを取得し、当該単位区間毎のEV走行割合および点灯割合を評価情報30bとして記録する。当該評価情報30bからは今回評価と過去評価とが特定される。
【0043】
本実施形態においては、運転者がナビゲーションプログラムの機能により、ユーザI/F部44を操作して目的地を設定し、当該目的地を設定した時点でのハイブリッド車両の現在位置を出発地とし、当該出発地から目的地までの経路を探索して案内する。そして、現在において当該出発地から当該目的地まで走行している場合に、当該出発地から当該目的地までの走行を今回の走行とみなす。すなわち、今回走行した区間は、出発地が始点、現在位置が終点となる区間であり、ハイブリッド車両の進行とともにハイブリッド車両が目的地に到達するまで今回走行した区間の総距離が大きくなる。なお、目的地を設定した走行が行われ、ハイブリッド車両が目的地に到達した場合、制御部20は、評価情報30bを記録する際に、出発地から目的地まで走行するまでの各単位区間についての評価情報と当該出発地および当該目的地とを対応付けて記録する。
【0044】
そして、制御部20は、今回評価取得部21bの処理により、評価情報30bから、今回の走行に関する今回評価を特定する。このために、制御部20は、出発地においてハイブリッド車両の走行が開始された後、目的地に到達する以前においてハイブリッド車両が今回走行した区間における単位区間毎の評価情報30bを取得する。そして、制御部20は、評価情報30bが示す単位区間毎のEV走行割合が所定の割合(例えば100%,90%等)以上である場合、単位区間毎の評価を、EV走行によって単位区間内の評価区間を走行したことを示す評価とする。一方、評価情報30bが示す単位区間毎のEV走行割合が所定の割合以上でない場合、評価情報30bが示す単位区間毎のランプ40aの点灯割合(ランプ40aが点灯している状態で走行した距離の割合)を所定の閾値と比較し、所定の閾値以上である場合に燃費の評価を「良」、当該点灯割合が所定の閾値よりも小さい場合に燃費の評価を「悪」とし、単位区間毎の今回評価とする。すなわち、HV走行においては、ランプ40aの点灯割合が高いほど燃費が高くなるため、ランプ40aの点灯割合は燃費改善に寄与する運転操作の頻度に対応しており、当該点灯割合によって、燃費を改善させるための運転操作の有無を評価することができる。以上のように、本実施形態においてHV走行ににおける燃費の評価は「良」「悪」のいずれかとする。なお、所定の閾値は、燃費の評価を行う際に決定されていればよく、本実施形態においては、運転者が予め設定した診断難易度に応じて当該所定の閾値が設定される。すなわち、診断難易度が高いほど所定の閾値が大きくなるように設定される。
【0045】
さらに、本実施形態において制御部20は、今回評価取得部21bの処理により、今回の走行におけるハイブリッド車両の平均燃費を示す今回平均燃費を取得する。すなわち、目的地を設定した走行が行われた場合、制御部20は、評価情報30bを記録する際に、出発地から現在位置までの消費燃料を示す情報に基づいて位置毎のハイブリッド車両の燃費を特定し、平均化し、出発地と目的地との組み合わせに対して平均化した燃費を対応付けて記録する。そして、制御部20は、今回評価取得部21bの処理により、評価情報30bが示す平均化された燃費のうち、今回の走行に関する燃費を今回平均燃費として取得する。なお、評価情報30bに対応付けられる平均化された燃費の情報は、ハイブリッド車両の走行とともに逐次更新される。従って、ハイブリッド車両が目的地に到達する前においては、ハイブリッド車両が出発地から目的地よりも進行方向後方の地点まで走行する過程における平均化された燃費が出発地と目的地との組み合わせに対して対応付けられて記録される。一方、ハイブリッド車両が目的地に到達すると、ハイブリッド車両が出発地から目的地まで走行する過程における平均化された燃費が出発地と目的地との組み合わせに対して対応付けられて記録される。
【0046】
過去評価取得部21cは、今回の走行よりも過去におけるハイブリッド車両の燃費の評価を単位区間毎に示す過去評価を取得する機能を制御部20に実現させるプログラムモジュールである。本実施形態において制御部20は、ハイブリッド車両が今回の走行よりも過去に出発地と同一の地点から出発し、目的地と同一の地点まで走行した場合における一連の走行を過去評価アイコンの表示対象となる過去の走行と見なす。そして、制御部20は、過去の走行でハイブリッド車両が走行した区間の単位区間毎の評価を過去評価として取得する。
【0047】
このために、制御部20は、評価情報30bから上述の今回の走行と同一の出発地、目的地が対応付けられたEV走行割合を示す情報とランプ40aの点灯割合を示す情報とを取得する。なお、今回の走行と同一の出発地、目的地が対応付けられた情報が複数個記録されている場合、例えば、出発地と目的地とに対応付けられた平均化された燃費が最も良いもの(すなわち、過去において最高の平均燃費となったもの)を過去評価として取得する構成とすればよい。そして、制御部20は、評価情報30bが示す単位区間毎のEV走行割合が所定の割合以上である場合、単位区間毎の評価を、EV走行によって単位区間内の評価区間を走行したことを示す評価とする。一方、評価情報30bが示す単位区間毎のEV走行割合が所定の割合以上でない場合、評価情報30bが示すランプ40aの点灯割合と所定の閾値と比較し、所定の閾値以上である場合に燃費の評価を「良」、当該点灯割合が所定の閾値よりも小さい場合に燃費の評価を「悪」とする。なお、今回の走行と過去の走行とで出発地と目的地とが同一か否かを判定するためには、地点からの距離に所定のマージンを設け、例えば、距離が300m以内の2地点は同一と見なすような構成を採用可能である。
【0048】
さらに、本実施形態において制御部20は、過去評価取得部21cの処理により、過去の走行におけるハイブリッド車両の平均燃費を示す過去平均燃費を取得する。すなわち、制御部20は、過去評価取得部21cの処理により、評価情報30bを参照し、上述の今回の走行と同一の出発地、目的地が対応付けられた平均化された燃費の中から最高の燃費を抽出し過去平均燃費として取得する。なお、本実施形態における過去平均燃費は、出発地から目的地までの走行を1回の走行とし、1回毎に平均燃費を特定しておき、過去の1回以上の走行の中から最高の燃費を抽出して表示する構成であるが、むろん、複数回の過去の走行の燃費を平均化した値を過去平均燃費としても良い。
【0049】
以上のようにして今回評価と過去評価と今回平均燃費と過去平均燃費とが取得されると、制御部20は、地図表示制御部21aの処理により、今回評価アイコンと過去評価アイコンと今回平均燃費と過去平均燃費とを地図上に描画するための制御信号をユーザI/F部44の表示部に出力する。なお、今回評価アイコンと過去評価アイコンとを表示するために、制御部20は、ユーザI/F部44の表示部に現在表示されている地図から、今回の走行によって走行した区間と過去の走行によって走行した区間とを抽出する。そして、制御部20は、各区間における単位区間毎の今回評価と過去評価とを特定し、各評価を示す今回評価アイコンと過去評価アイコンとを特定し、当該今回評価アイコンと当該過去評価アイコンとを地図上に描画するための制御信号をユーザI/F部44の表示部に出力する。この結果、ユーザI/F部44の表示部は、単位区間毎の今回評価アイコンと過去評価アイコンと今回平均燃費と過去平均燃費とを表示する。
【0050】
本実施形態において、アイコンは、今回評価と過去評価とを対比可能なアイコンであるとともに、EV走行とHV走行とを対比可能なアイコンである。本実施形態においては、アイコンの外周を実線で表現することによってそのアイコンが今回の走行に関する評価を示していると認識できるように構成している。また、アイコンの外周を破線で表現することによってそのアイコンが過去の走行に関する評価を示していると認識できるように構成している。一方、アイコンの外周の形状を、車を模した形状で表現するとともに内側に「EV」という文字を付して表現することによってそのアイコンがEV走行を示していると認識できるように構成している。また、アイコンの外周の形状を、葉を模した形状で表現することによってそのアイコンがHV走行を示していると認識できるように構成している。なお、HV走行を示すアイコンにおいては、葉の内側の着色(本実施形態では白抜きとハッチング)によって燃費の「良」「悪」を示すように構成されている。
【0051】
図5Aは、表示部に表示される地図の例を示しており、本例においては、実線の曲線によって示された道路R上にハイブリッド車両の現在位置を示すアイコンCが表示されている。図5Aにおいては、アイコンCよりも前方の道路上に外周が破線で表現された過去評価アイコンEpe,Epg,Epbが表示された状態を示している。なお、過去評価アイコンEpeは外周が車を模した形状であり、過去の走行においてEV走行された単位区間を示している。従って、アイコンEpeは、過去評価アイコンであるとともにEV走行したことを示すEVアイコンでもある。過去評価アイコンEpg,Epbは、外周が葉を模した形状でありため、過去の走行においてHV走行された単位区間を示している。そして、過去評価アイコンEpg,Epbのうち、白抜きの着色がされた過去評価アイコンEpgが「良」評価である単位区間、ハッチングで示す着色がされた過去評価アイコンEpbが「悪」評価である単位区間を示している。
【0052】
一方、アイコンCよりも後方の道路上に外周が実線で表現された今回評価アイコンEte,Etg,Etbが表示された状態を示している。今回評価アイコンEteは外周が車を模した形状であり、今回の走行においてEV走行された単位区間を示している。従って、アイコンEteは、今回評価アイコンであるとともにEV走行したことを示すEVアイコンでもある。今回評価アイコンEtg,Etbは、外周が葉を模した形状であり、今回の走行においてHV走行された単位区間を示している。そして、今回評価アイコンEtg,Etbのうち、白抜きの着色がされた今回評価アイコンEtgが「良」評価である単位区間、ハッチングで示す着色がされた今回評価アイコンEtbが「悪」評価である単位区間を示している。従って、アイコンEtg,Etbは、今回評価アイコンであるとともにHV走行したことを示すHVアイコンでもある。また、図5Aに示す例においては、表示部に表示される地図の右下に矩形の領域が設けられており、今回平均燃費(図においては24.5km/l)と過去平均燃費(図においては23.9km/l)とが表示されている。なお、道路R上に記された太い線は今回の走行において出発地から目的地まで到達するための走行予定経路を示している。
【0053】
以上のように、本実施形態によれば、ユーザI/F部44の表示部に表示された地図に、今回評価アイコンと過去評価アイコンとが同時に視認できるように表示される。この結果、運転者は今回の走行区間における燃費の評価と過去の燃費の評価とを運転中に容易に比較しながら運転を行うことができる。なお、本実施形態においては、今回評価と、過去評価とを区別できるように今回評価アイコンと過去評価アイコンとを異なる態様(図5Aに示す例では実線と破線)で地図に表示している。従って、運転者は、今回評価と過去評価とを混同することなく明確に区別することが可能になる。また、本実施形態においては、EV走行とHV走行とを区別できるようにEVアイコンとHVアイコンとを異なる態様(図5Aに示す例では外周形状が車と葉)で地図に表示している。従って、運転者は、EV走行とHV走行とを混同することなく明確に区別することが可能になる。
【0054】
ここで、今回評価と過去評価とは単位区間毎に定義され、今回においても過去においても通常は、複数の単位区間を走行するため、地図上においては複数の連続する単位区間について今回評価アイコンと過去評価アイコンとが表示されることになる。そして、今回評価アイコンおよび過去評価アイコンが複数の単位区間に渡って地図上に表示されると、運転者は今回および過去の各単位区間における走行がEV走行とHV走行とのいずれであったのかを認識することが可能になる。また、運転者は、HV走行であった場合には、燃費の良し悪しを複数の単位区間に渡って認識することが可能になる。さらに、運転者は今回の走行において走行済の複数の単位区間に渡るEV走行とHV走行との比率から、今回の走行にてEV走行をすることができた単位区間の比率の多寡を把握することができる。そして、過去の走行と今回の走行とにおけるEV走行の多寡によってできるだけ長期間EV走行を継続するための指針を得ることが可能である。
【0055】
例えば、図5Bにおいては、単位区間Z1〜Z5に対応する過去評価アイコンがEVアイコンEpeであった場合の例を示しており、この例において運転者は単位区間Z1〜Z5における過去の走行がEV走行であったことを認識することができる。一方、図5C,図5Dに示すように単位区間Z1〜Z5のいずれかにおいて今回評価アイコンがHVアイコンEtgとなった単位区間が存在する場合、当該単位区間において過去にEV走行できたにもかかわらず今回HV走行をしてしまった原因として、以下の2要因が考えられる。
要因1:今回の走行においてはEV走行をすることができないSOCであった
要因2:今回の走行における運転操作が非効率な運転となるような運転操作であった(例えば、過度にアクセル操作をした)
【0056】
そして、図5Bに示すように過去の走行において複数の単位区間Z1〜Z5にて連続的にEV走行をすることができ、図5Cに示すように今回の走行において複数の単位区間Z2〜Z5にて連続的にEV走行をすることができなかった場合、評価悪化の原因は要因1であると推定することができる。すなわち、過去に複数の単位区間Z1〜Z5に渡って連続的にEV走行できた場合には運転者にとって当該複数の単位区間Z1〜Z5においてEV走行を行うことが容易であると推定され、このような複数の単位区間Z1〜Z5で今回連続的にEV走行できないのであれば、運転者の技術によってEV走行できなかったのではなく、バッテリ48のSOCが低下してEV走行ができない状態であったと推定する方が妥当である。従って、今回の走行における単位区間Z2〜Z5についての評価を次回以降の運転操作の指針としないように判断することができる。なお、過去の走行においてEV走行をすることができた単位区間であって今回の走行においてEV走行をすることができなかった単位区間が連続する場合(例えば、図5Bおよび図5Cに示す単位区間Z2〜Z5の評価が連続する場合)にも、評価悪化の原因は要因1であると推定することができる。
【0057】
一方、図5Bに示すように複数の単位区間Z1〜Z5にて過去の走行において連続的にEV走行をすることができ、当該複数の単位区間Z1〜Z5についての今回の走行でEV走行をできなかった単位区間が離散的に現れる場合、評価悪化の原因は要因2であると推定することができる。すなわち、図5Cに示すように過去の走行において単位区間Z4の前後に渡る複数の単位区間Z1〜Z5にてEV走行でき、図5Dに示すように今回の走行において単位区間Z1〜Z3,Z5にてEV走行できたにもかかわらず、単位区間Z4においてEV走行できなかった場合、単位区間Z4においてSOCがEV走行をすることができない状態となる確率は低い。従って、単位区間Z4において運転者自身が効率的に運転を行うように心がけることにより、EV走行で走行する単位区間の数を増やすことが可能になる。
【0058】
さらに、燃費を向上させるためにEV走行を行うことが良いとされる単位区間でEV走行を行うようにするための指針を得ることも可能である。図6A,6Bは、一点鎖線で示す単位区間Z1,Z2が上りであり、実線で示す単位区間Z3〜Z5が下りである例を示している。本実施形態にかかるハイブリッド車両においては、回生エネルギーによって発電された電力をバッテリ48に蓄積する回生ブレーキを利用することが可能である。そして、回生ブレーキは主に下りで利用されるため、上りの後に下りが続く道路においては、上りの区間でEV走行をし、下りの区間でHV走行を行うことで、下りの区間で回生ブレーキによってバッテリ48に電力を充電することが好ましい。
【0059】
そこで、例えば、図6Aに示すように、過去の走行において上りの単位区間Z1,Z2でHV走行を行い下りの単位区間Z3〜Z5でEV走行を行った場合、運転者はこれらの単位区間Z1〜Z5における過去の走行は理想的な走行ではないと認識することができる。また、運転者は、単位区間Z1,Z2でEV走行を行い下りの単位区間Z3〜Z5でHV走行を行うべきであるという指針を得ることができる。そして、今回の走行において、図6Bに示すように単位区間Z1,Z2でEV走行、下りの単位区間Z3〜Z5でHV走行を行った場合には、実際に運転者が今回の走行において理想的な走行をしたと確認することができる。
【0060】
さらに、今回評価アイコンがHVアイコンである場合、運転者は走行済の複数の単位区間に渡る燃費の評価の良し悪しから、走行済の複数の単位区間において総燃料消費量が抑制されている傾向であるのか、過総燃料消費量が多い傾向であるのかを把握することができる。例えば、図5Aに示す例においては、実線のハッチが付されたアイコンEtbが少なければ総燃料消費量が抑制されており、多ければ総燃料消費量が多い傾向であると把握することができる。
【0061】
一方、過去評価アイコンがHVアイコンである場合、運転者は複数の単位区間に渡る過去評価を認識することが可能になる。そして、運転者は複数の単位区間に渡る燃費の評価の良し悪しから、総燃料消費量が抑制されている傾向であるのか、総燃料消費量が多い傾向であるのかを把握することができる。従って、総燃料消費量が抑制されている傾向であった区間においては、自身が再度同一区間を走行する際に燃料消費を抑制しながら運転することが容易であると推定することができる。また、総燃料消費量が多い傾向であった区間においては、燃費の改善の余地があると推定することができる。すなわち、過去に走行した区間の燃費の評価に基づいて当該区間での走行の指針を決定することができる。例えば、図5Aに示す例においては、現在位置C以降において、区間Zb以外の区間においては総燃料消費量が抑制されている傾向にあり、運転者は自身が再度同一区間を走行する際に燃料消費を抑制しながら運転することが容易であると推定することができる。また、区間Zbにおいては総燃料消費量が多い傾向にあり、運転者は燃費の改善の余地があると推定することができる。
【0062】
そして、本発明においては、地図上に単位区間毎の今回評価アイコンと過去評価アイコンとが併せて表示されるため、運転者は複数の単位区間に渡る今回評価と過去評価とを運転中に対比しながら運転を行うことができる。一般に、車両の走行過程において運転者が表示部を凝視することはできず、運転者は表示部に表示された情報を断続的に視認することができるに過ぎない。そして、運転者が現在位置を走行している瞬間における燃費の評価を断続的に認識して過去の評価と比較したとしても、走行開始から終了までの過程で燃料の消費量を抑制できるか否かを判断することは困難である。
【0063】
しかし、本実施形態においては、単位区間毎の今回評価アイコンと過去評価アイコンとを併せて地図に表示し、運転者は複数の単位区間についての今回評価と過去評価とを一覧して把握することができる。従って、運転者が現在位置以降に走行し得る単位区間における過去評価と今回評価を対比することにより、今回の走行における総燃料消費量の程度に応じて過去に走行した区間の指針を決定しながら運転を行うことが可能になる。例えば、図5Aに示す例によれば、運転者は地図を一覧するのみで今回評価がEV走行できたことを示す評価であるEteである割合と今回評価が「良」であるEtgの割合と今回評価が「悪」であるEtbの割合とを把握することができる。従って、Ete,Etg,Etbの割合によって現在位置までの今回の走行において総燃料消費量が比較的多いのか、少ないのかを認識することが可能である。
【0064】
また、運転者は地図を一覧するのみで過去評価がEV走行できたことを示す評価であるEpeである割合と過去評価が「良」であるEpgの割合と過去評価が「悪」であるEpbの割合とを把握することができる。従って、Epe,Epg,Epbの割合によって現在位置以降の区間の過去の走行において、総燃料消費量が比較的多かった区間と比較的少なかった区間とを把握することができる。例えば、図5Aに示す例においては、総燃料消費量が比較的多かった区間Zbや燃料消費量が極めて少なかった区間Zeを即座に視認することができる。そして、例えば、今回の走行における総燃料消費量が比較的多く、運転者が今後の走行で燃料消費量を抑制したいと考える場合、過去の走行で総燃料消費量が多い傾向であった区間において、アクセル開度を抑えて走行すれば燃費を改善できると推定することができる。また、過去の走行で総燃料消費量が抑制されている傾向であった区間においては、過度に慎重な運転をしなくても燃料消費を抑制可能であると推定することができる。
【0065】
なお、今回の走行と過去の走行とで出発地と目的地とが同一の場合、通常は、ナビゲーションプログラムによって同一の経路が探索される。今回の走行と過去の走行とが同一の経路であった場合、図5Aに示すように、今回の走行に関する今回評価アイコンEte,Etg,Etbは出発地から現在位置までの経路について表示される。過去の走行に関する過去評価アイコンEpe,Epg,Epbは、少なくとも、現在位置から目的地までの経路について表示される。この場合、過去評価アイコンEpe,Epg,Epbは、今回の走行よりも過去に現在位置Cを含む区間を走行した場合のハイブリッド車両の燃費の評価となる。過去評価アイコンEpe,Epg,Epbの表示対象となる現在位置を含む区間は、図5Aに示すように現在位置Cの直後に走行する道路を含むため、運転者は現在位置以後の過去評価アイコンEpe,Epg,Epbを認識し、さらに、現在位置以前の今回評価アイコンEte,Etg,Etbを対比させながら運転を行うことが可能になる。従って、本実施形態によれば、ある出発地から他の目的地に向けて今回走行する際に、過去の走行に比べて総消費燃料を抑制するための指針を運転者が決定しながら運転を行うことが可能である。
【0066】
さらに、本実施形態においては、ユーザI/F部44の表示部において、単位区間毎の燃費の評価に加え、複数の単位区間に渡る燃費の評価である今回平均燃費と、過去平均燃費とを表示する(図5Aにおいては右下の矩形領域Tに表示)。従って、運転者は、単位区間毎の今回評価と過去評価に加え、複数の単位区間に渡る評価である今回平均燃費と過去平均燃費とを認識することができ、より容易に今回の総消費燃料と過去の総消費燃料とを判定することができる。
【0067】
(2)評価情報取得処理:
次に、評価情報取得処理について詳細に説明する。図2は、評価情報取得処理のフローチャートであり、本実施形態において制御部20は、目的地を設定した走行が開始された後に今回評価取得部21bによって評価情報取得処理を実行する。評価情報取得処理が実行される前に制御部20は、ハイブリッド車両が単位区間の長さとして定義された一定距離を走行したか否かを判定するための累計距離と、単位区間内で燃費の評価を行うことが可能であった距離を特定するための評価距離と、EV走行の距離を特定するためのEV走行距離と、ランプ40aが点灯した状態で走行した距離を特定するための点灯距離とを示す変数を初期化する。
【0068】
制御部20は、走行距離を累計距離に加算する(ステップS100)。本実施形態において、ステップS100〜S130はループ処理となっており、ループ処理が繰り返される場合には一定の期間(例えば、100ms)毎にステップS100の処理が行われる。そこで、制御部20は、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて、前回ステップS100が実行されてから今回ステップS100が実行されるまでの間にハイブリッド車両が走行した走行距離ΔLを特定し、累計距離に加算する。すなわち、制御部20は、ステップS100〜S130が繰り返されている間にハイブリッド車両が走行した総距離を示す値が累計距離となるように加算処理を行う。
【0069】
次に、制御部20は、車速が所定値以上であるか否かを判定し(ステップS110)、車速が所定値以上であると判定されない場合にはステップS115〜S125をスキップする。一方、ステップS110にて、車速が所定値以上であると判定された場合、制御部20は、走行距離を評価距離に加算する(ステップS115)。すなわち、ステップS100にて累計距離に加算された上述の走行距離ΔLを評価距離に加算する。
【0070】
ここで、ステップS110の判定における判定条件となる所定値は、所定値よりも小さい車速である場合に有意な燃費の評価が行えなくなるような車速の値(例えば4km/h)として予め定義されていればよい。すなわち、車速が過度に低速である場合、消費燃料を抑制した運転と過度に燃料を消費した運転とを区別して運転操作をすることが困難であるため、所定値よりも小さい車速である場合には燃費の評価を行わないようにする。このために、本実施形態においては、車速が所定値よりも小さい場合、有意な燃費の評価を行えないと見なしてステップS115を実行しないが、車速が所定値以上であれば有意な燃費の評価を行えると見なしてステップS115にて評価距離をΔLだけ増加させることになる。なお、当該所定値は、燃費評価ランプECU40がランプ40aを点灯させる際の条件の一つとして車速について設定されている所定の閾値と同一であっても良い。
【0071】
さらに、制御部20は、駆動制御ECU49の出力信号に基づいて内燃機関46が回転しているか否かを判定し(ステップS117)、内燃機関46が回転していると判定される場合にはステップS119をスキップする。一方、ステップS117にて、内燃機関46が回転していると判定された場合、制御部20は、走行距離をEV走行距離に加算する(ステップS119)。すなわち、有意な燃費の評価を行うことが可能な状態であり、かつ、内燃機関が回転していない場合に、制御部20は、ハイブリッド車両がEV走行をしているとみなし、ステップS100にて累計距離に加算された上述の走行距離ΔLをEV走行距離に加算する。
【0072】
さらに、制御部20は、ランプ40aが点灯しているか否かを判定し(ステップS120)、ランプ40aが点灯していると判定されない場合にはステップS125をスキップする。一方、ステップS120にて、ランプ40aが点灯していると判定された場合、制御部20は、走行距離を点灯距離に加算する(ステップS125)。すなわち、有意な燃費の評価を行うことが可能な状態であり、かつ、ランプ40aが点灯している場合に、制御部20は、ステップS100にて累計距離に加算された上述の走行距離ΔLを評価距離に加算する。
【0073】
次に、制御部20は、累計距離が一定距離以上になったか否かを判定し(ステップS130)、ステップS130にて累計距離が一定距離以上になったと判定されるまでステップS100以降の処理を繰り返す。すなわち、制御部20は、累計距離が、単位区間の距離として予め定義された一定距離以上になった場合に、ハイブリッド車両が単位区間を走行したと見なしてステップS100〜S130のループ処理を抜けることになる。
【0074】
ステップS130にて、累計距離が一定距離以上になったと判定された場合、制御部20は、評価距離が0より大きいか否かを判定する(ステップS135)。すなわち、ハイブリッド車両が単位区間を走行する過程において有意な評価を行える区間が存在したか否かを判定する。ステップS135にて、評価距離が0より大きいと判定された場合、制御部20は、EV走行割合をEV走行距離/評価距離に設定し、ランプ40aの点灯割合を点灯距離/評価距離に設定する(ステップS140)。一方、ステップS135にて、評価距離が0より大きいと判定されない場合、制御部20は、EV走行割合を0に設定し、ランプ40aの点灯割合を0に設定する(ステップS145)。すなわち、点灯割合を評価するための分母が0である場合には点灯割合の定義から点灯割合を算出できないため0とする。むろん、ここでは、評価不能などとすることも可能である。
【0075】
次に、制御部20は、ステップS140あるいはS145にて設定したEV走行割合、ランプ40aの点灯割合を累計距離の計測対象となった単位区間に対応付けて評価情報30bとして記録媒体30に記録する(ステップS150)。以上の処理によれば、単位区間毎の評価情報30bを記録媒体30に記録することができる。なお、ハイブリッド車両の目的地が設定された状態で評価情報取得処理が実行された場合、制御部20は、ステップS150において、目的地と出発地とを示す情報を評価情報30bに対応付けて記録する。
【0076】
(3)評価情報表示処理:
次に、評価情報表示処理について詳細に説明する。図3および図4は、評価情報表示処理のフローチャートであり、本実施形態においては、運転者によって目的地が設定され、今回の走行の出発地および目的地と同一の出発地および目的地であった過去の走行についての評価情報30bが存在する場合に当該評価情報表示処理が実行される。また、制御部20は、ユーザI/F部44の表示部において所定の期間毎に地図表示を更新しており、当該更新のたびに当該評価情報表示処理が実行される。さらに、当該評価情報表示処理が実行される前には予め上述の診断難易度が運転者の指示あるいはデフォルト値によって特定されている。
【0077】
ステップS200〜S230は過去評価を地図上に表示するためのループ処理であり、制御部20は、地図表示制御部21aおよび過去評価取得部21cの処理により、まず、過去評価の表示対象から処理対象の単位区間を選択する(ステップS200)。すなわち、制御部20は、地図表示制御部21aの処理により、ユーザI/F部44の表示部に表示されている地図の範囲を特定する。さらに、制御部20は、過去評価取得部21cの処理により、今回の走行における出発地および目的地と同一の出発地および目的地が対応付けられた評価情報30bから、出発地と目的地とに対応付けられた平均化された燃費が最も良いものを抽出する。さらに、制御部20は、地図表示制御部21aの処理により、抽出された評価情報30bに対応付けられた単位区間からユーザI/F部44の表示部に表示されている地図の範囲に含まれる単位区間を表示対象として特定する。そして、表示対象の単位区間の中から過去評価アイコンを表示する処理を行っていない単位区間を処理対象の単位区間として選択する。
【0078】
次に、制御部20は、過去評価取得部21cの処理により、処理対象の単位区間の過去の評価情報30bを取得する(ステップS205)。すなわち、処理対象の単位区間の過去の走行におけるEV走行割合およびランプ40aの点灯割合を取得する。次に、制御部20は、過去評価取得部21cの処理により、処理対象の単位区間の過去の走行におけるEV走行割合が100%であるか否かを判定する(ステップS207)。そして、ステップS207において、EV走行割合が100%であると判定されない場合、過去評価アイコンをHVアイコンに設定し(ステップS208)、EV走行割合が100%であると判定された場合、過去評価アイコンをEVアイコンに設定する(ステップS209)。
【0079】
本実施形態において、EVアイコンとしての過去評価アイコンは1種類であるため、ステップS209が実行されると過去評価アイコンは確定される。例えば、図5Aに示す例においては、処理対象の単位区間の過去評価アイコンがアイコンEpeとされる。一方、本実施形態において、HVアイコンとしての過去評価アイコンは2種類であるため、ステップS208が実行されると過去評価アイコンはアイコンEpg,Epbのいずれかになる。
【0080】
そこで、制御部20は、さらに、過去評価取得部21cの処理により、処理対象の単位区間の過去の走行におけるランプ40aの点灯割合が所定の閾値以上であるか否かを判定する(ステップS210)。ステップS210でランプ40aの点灯割合が所定の閾値以上であると判定された場合、制御部20は、過去評価取得部21cの処理により、処理対象の単位区間の過去評価アイコンを、「良」を示すHVアイコンに設定する(ステップS215)。例えば、図5Aに示す例では過去評価アイコンがアイコンEpgに設定される。また、ステップS210でランプ40aの点灯割合が所定の閾値以上であると判定されない場合、制御部20は、過去評価取得部21cの処理により、処理対象の単位区間の過去評価アイコンを、「悪」を示すHVアイコンに設定する(ステップS220)。例えば、図5Aに示す例では過去評価アイコンがアイコンEpbに設定される。なお、ランプ40aの点灯割合と比較される所定の閾値は上述の診断難易度に応じて設定され、診断難易度が高いほど大きい値となる。従って、診断難易度が高いほど、過去評価が「良」とされにくくなる。
【0081】
次に、制御部20は、地図表示制御部21aの処理により、処理対象の単位区間に過去評価アイコンを表示する(ステップS225)。すなわち、制御部20は、ステップS209,S215,S220のいずれかで設定された過去評価アイコンを処理対象の単位区間に描画するための信号をユーザI/F部44の表示部に対して出力する。この結果、ユーザI/F部44の表示部は、処理対象の単位区間に過去評価アイコンを表示する。
【0082】
次に、制御部20は、地図表示制御部21aの処理により、表示対象の単位区間の過去評価アイコンを表示済であるか否かを判定する(ステップS230)。すなわち、制御部20は、ステップS200にて特定された表示対象の単位区間の全てについて過去評価アイコンを表示したか否かを判定する。ステップS230にて、表示対象の単位区間の過去評価アイコンを表示済であると判定されない場合、ステップS200以降の処理を繰り返す。一方、ステップS230にて表示対象の単位区間の過去評価アイコンを表示済であると判定された場合、ステップS235以降で今回評価アイコンを表示するための処理を行う。表示対象の単位区間の過去評価アイコンを表示した時点では、図5Aに示す実線のアイコンEte,Etg,Etb(今回評価を示すアイコン)は表示されておらず、破線で示すアイコンEpe,Epg,Epb(過去評価を示すアイコン)が表示された状態となる。なお、今回の走行と過去の走行とで経路が同一である場合、ハイブリッド車両の現在位置よりも後方の単位区間においても過去評価アイコンが表示されるが、ステップS235以降の処理によって同一の単位区間上に今回評価アイコンが表示される場合には、今回評価アイコンが優先的に表示される。
【0083】
ステップS235〜S265は今回評価アイコンを地図上に表示するためのループ処理であり、制御部20は、地図表示制御部21aおよび今回評価取得部21bの処理により、まず、今回評価アイコンの表示対象から処理対象の単位区間を選択する(ステップS235)。すなわち、制御部20は、地図表示制御部21aの処理により、ユーザI/F部44の表示部に表示されている地図の範囲を特定する。さらに、制御部20は、今回評価取得部21bの処理により、今回の走行の過程で記録媒体に記録された評価情報30bに対応付けられた単位区間からユーザI/F部44の表示部に表示されている地図の範囲に含まれる単位区間を表示対象として特定する。そして、表示対象の単位区間の中から今回評価アイコンを表示する処理を行っていない単位区間を処理対象の単位区間として選択する。
【0084】
次に、制御部20は、今回評価取得部21bの処理により、処理対象の単位区間の今回の評価情報を取得する(ステップS240)。すなわち、処理対象の単位区間の今回の走行におけるEV走行割合およびランプ40aの点灯割合を取得する。次に、制御部20は、今回評価取得部21bの処理により、処理対象の単位区間の今回の走行におけるEV走行割合が100%であるか否かを判定する(ステップS241)。そして、ステップS241において、EV走行割合が100%であると判定されない場合、今回評価アイコンをHVアイコンに設定し(ステップS243)、EV走行割合が100%であると判定された場合、今回評価アイコンをEVアイコンに設定する(ステップS244)。過去評価アイコンと同様に、ステップS244が実行されると今回評価アイコンは確定される。例えば、図5Aに示す例においては、処理対象の単位区間の今回評価アイコンがアイコンEteとされる。一方、本実施形態において、ステップS243が実行されると今回評価アイコンはアイコンEtg,Etbのいずれかになる。
【0085】
そこで、制御部20は、さらに、今回評価取得部21bの処理により、処理対象の単位区間の今回の走行におけるランプ40aの点灯割合が所定の閾値以上であるか否かを判定する(ステップS245)。ステップS245でランプ40aの点灯割合が所定の閾値以上であると判定された場合、制御部20は、今回評価取得部21bの処理により、処理対象の単位区間の今回評価アイコンを、「良」を示すHVアイコンに設定する(ステップS250)。例えば、図5Aに示す例では今回評価アイコンがアイコンEtgに設定される。また、ステップS245でランプ40aの点灯割合が所定の閾値以上であると判定されない場合、制御部20は、今回評価取得部21bの処理により、処理対象の単位区間の今回評価アイコンを、「悪」を示すHVアイコンに設定する(ステップS255)。例えば、図5Aに示す例では今回評価アイコンがアイコンEtbに設定される。なお、ランプ40aの点灯割合と比較される所定の閾値はステップS210における所定の閾値と同一である。
【0086】
次に、制御部20は、地図表示制御部21aの処理により、処理対象の単位区間に今回評価アイコンを表示する(ステップS260)。すなわち、制御部20は、ステップS244,S250,S255のいずれかで設定された今回評価アイコンを処理対象の単位区間に描画するための信号をユーザI/F部44の表示部に対して出力する。この結果、ユーザI/F部44の表示部は、処理対象の単位区間に今回評価アイコンを表示する。
【0087】
次に、制御部20は、地図表示制御部21aの処理により、表示対象の単位区間の今回評価アイコンを表示済であるか否かを判定する(ステップS265)。すなわち、制御部20は、ステップS235にて特定された表示対象の単位区間の全てについて今回評価アイコンを表示したか否かを判定する。ステップS265にて、表示対象の単位区間の今回評価アイコンを表示済であると判定されない場合、ステップS235以降の処理を繰り返す。一方、ステップS265にて表示対象の単位区間の今回評価アイコンを表示済であると判定されると、制御部20は、評価情報表示処理を終了する。本実施形態において、同一の単位区間上に過去評価アイコンと今回評価アイコンとが表示される場合には、今回評価アイコンが優先的に表示されるため、表示対象の単位区間の今回評価アイコンが表示されると、図5Aに示す例のように、ハイブリッド車両の現在位置以前にハイブリッド車両が走行した区間には実線で今回評価のアイコンEte,Etg,Etbが表示される。また、ステップS235〜S265の処理においてはハイブリッド車両の現在位置よりも前方の区間に今回評価アイコンは表示されないため、当該ハイブリッド車両の現在位置よりも前方の区間においては破線で過去評価のアイコンEpe,Epg,Epbが表示される。
【0088】
(4)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、単位区間毎の評価を示す今回評価アイコンと過去評価アイコンとを表示する構成において、EV走行であることを示すEVアイコンとHV走行における燃費の評価を示すHVアイコンとを表示する限りにおいて、他にも種々の実施形態を採用可能である。例えば、今回評価や過去評価は、ハイブリッド車両に搭載されていない装置、例えば、情報管理センターから取得しても良い。むろん、ナビゲーション端末10は、ハイブリッド車両に固定的に搭載されていても良いし、持ち運び可能なナビゲーション端末10がハイブリッド車両内に持ち込まれて利用される態様であっても良い。
【0089】
さらに、燃費の評価は、複数の要素の組み合わせに対する条件によって評価されても良いし、単一の要素(例えば、燃費の値)に対する条件によって評価されても良い。さらに、燃費の評価は、燃費を変化させるための指針となる情報であれば良く、燃費の値を示す情報(例えば、単位区間内の平均値を示す情報)であっても良いし、基準の燃費と今回の燃費とを比較した結果を示す情報(例えば、基準燃費との相対関係を示す情報)であっても良い。
【0090】
さらに、出発地や目的地は、上述の構成のように運転者が明示的に目的地を指示した時点で決定される構成の他、種々の構成を採用可能である。例えば、ハイブリッド車両の動作状態に基づいてハイブリッド車両が出発したと判定される地点や到着したと判定される地点を出発地や目的地とする構成を採用しても良い。さらに、今回の目的地を、例えば、今回の走行の経路や過去の走行履歴等に基づいて推定しても良い。
【0091】
さらに、上述の実施形態においては、今回の走行における出発地および目的地と同一の出発地から同一の目的地まで過去に走行した場合にその走行区間を過去評価アイコンの表示対象としたが、他の規則によって過去評価アイコンの表示対象区間を決定しても良い。すなわち、地図に表示されている今回よりも過去の走行区間のうち、今回評価と対比すべき区間を過去評価アイコンの表示対象区間とし、当該表示対象区間についての単位区間毎の燃費の評価を過去評価とすればよい。そして、過去評価アイコンの表示対象区間は、過去評価の情報が存在する区間の全てであっても良いし、一部であっても良い。例えば、現在位置周辺において、過去評価を特定可能な情報がある単位区間の全てあるいは一部の区間における過去評価アイコンを表示する構成としても良い。この構成において、現在位置までの今回の走行において総燃料消費量が多く、運転者が今後の走行で燃料消費量を抑制したいと考える場合、過去の走行で総燃料消費量が抑制されている傾向であった区間を走行するように経路を選択すれば、燃料消費を抑制可能であると推定することができる。
【0092】
同様に、出発地から目的地までの走行を今回の走行とする構成以外にも、種々の態様によって今回の走行を定義することができる。すなわち、今回の走行区間の始点は特に限定されず、現在位置まで連続的に走行した場合において当該連続的な走行の開始地点を今回の走行区間の始点としても良いし、走行日が異なるなど非連続な走行が行われた場合において現在位置よりも前にハイブリッド車両が存在した地点を区間の始点としても良い。すなわち、今回の走行と今回の走行よりも過去の走行とが区別されて対比できるように今回の走行区間が定義されていればよい。
【0093】
より具体的には、例えば、ハイブリッド車両の動力源(内燃機関46やモータ47)が起動された後、動力源が停止されることなく現在位置に到達した場合に、動力源が起動された位置から現在位置までの区間についての今回評価を取得し、ハイブリッド車両の動力源が起動された時点より前における過去評価を取得する構成としても良い。すなわち、現在に最も近い過去の時点での動力源の起動から現在位置までの連続的な走行を今回の走行と見なして今回評価を取得し、当該今回の走行よりも過去の走行についての評価は過去評価とする。この構成は、例えば、図1に示す構成において、ハイブリッド車両の動力源が最も最近起動された時点以後に取得された評価情報30bに基づいて今回評価を特定し、当該時点より前に取得された評価情報30bに基づいて過去評価を特定することによって実現可能である。この構成によれば、運転者が運転を開始するたびにそれ以前の走行に対して燃費が改善した否かを判定することが可能になる。
【0094】
さらに、利用者に指定された時点以後の走行によってハイブリッド車両が現在位置に到達した場合に、利用者に指定された時点におけるハイブリッド車両の位置から現在位置までの区間についての今回評価を取得し、利用者に指定された時点より前における過去評価を取得する構成としても良い。すなわち、利用者が指定した時点以前の評価と、当該時点より前の評価とが対比できるように構成される。この構成は、例えば、図1に示す構成において、利用者に指定された時点以後に取得された評価情報30bに基づいて今回評価を特定し、当該時点より前に取得された評価情報30bに基づいて過去評価を特定することによって実現可能である。この構成によれば、利用者が指定した時点での走行に比べて燃費が改善したか否かを判定することが可能になる。
【0095】
さらに、単位区間は、燃費に関する評価の結論を導くための区間であればよく、一定距離の区間を単位区間とする構成の他、所定の規則によって決められた区間を単位区間としても良い。例えば、地図情報が示す最も近いノード同士を端点とする一つのリンクを一つの単位区間とする構成等を採用可能である。さらに、今回評価アイコンを表示する対象となる単位区間と過去評価アイコンを表示する対象となる単位区間とは、一致していても良いし異なっていても良い。すなわち、単位区間が共通の規則で決められていればよく、表示対象の単位区間は適宜選択されて良い。
【0096】
さらに、ハイブリッド車両においては、バッテリ48が上限まで充電されている状態でHV走行を行っても回生エネルギーを回収できないため、走行効率が悪い。そこで、ハイブリッド車両の走行過程において、制御部20が、駆動制御ECU49の出力信号に基づいてバッテリ48のSOCを取得して記録媒体30に記録する構成としてもよい。そして、当該記録媒体に記録されたSOCに基づいて制御部20が今回の走行および過去の走行におけるSOCを特定し、地図上に今回の走行および過去の走行においてバッテリ48が上限まで充電されていた位置を表示する構成としても良い。例えば、図6Cにおいて二点鎖線で示す区間Ztf,Zpfのように、バッテリ48が上限まで充電されていた位置を表示する構成等を採用可能である。このような構成によれば、運転者は、過去の走行においてバッテリ48が上限まで充電されていた区間Zpfに、今回の走行においてハイブリッド車両が到達する前にEV走行を行うべきであるという指針を得ることができる。また、今回の走行においてバッテリ48が上限まで充電されていた区間Ztfが表示されていれば、運転者は、今回の走行において区間Ztf以降でEV走行を行うべきであるという指針を得ることができる。
【符号の説明】
【0097】
10…ナビゲーション端末、20…制御部、21…評価表示プログラム、21a…地図表示制御部、21b…今回評価取得部、21c…過去評価取得部、30…記録媒体、30a…地図情報、30b…評価情報、40…燃費評価ランプECU、40a…ランプ、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…ユーザI/F部、45…燃料タンク、46…内燃機関、47…モータ、48…バッテリ、49…駆動制御ECU
【特許請求の範囲】
【請求項1】
内燃機関とモータとによって駆動可能であるとともに前記内燃機関の駆動が許可されるHV走行と前記内燃機関の駆動が停止されるEV走行とを実行可能なハイブリッド車両についての評価表示システムであって、
前記ハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示部に表示する地図表示制御手段と、
前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得する今回評価取得手段と、
前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得する過去評価取得手段と、を備え、
前記地図表示制御手段は、
前記地図上に前記単位区間毎の前記今回評価を示す今回評価アイコンと前記過去評価を示す過去評価アイコンとを併せて表示するとともに、
前記今回評価アイコンおよび前記過去評価アイコンを、前記ハイブリッド車両が前記EV走行によって前記単位区間内の評価区間を走行したことを示すEVアイコンと、前記ハイブリッド車両が前記HV走行によって前記単位区間内の評価区間を走行した場合の燃費の評価を示すHVアイコンと、のいずれかで表現することを特徴とする評価表示システム。
【請求項2】
前記ハイブリッド車両が備えるバッテリの充電状態を前記今回の走行および前記過去の走行について取得する充電状態取得手段を備え、
前記地図表示制御手段は、前記地図上に前記今回の走行および前記過去の走行において前記バッテリが上限まで充電されていた位置を表示する、
請求項1に記載の評価表示システム。
【請求項3】
内燃機関とモータとによって駆動可能であるとともに前記内燃機関の駆動が許可されるHV走行と前記内燃機関の駆動が停止されるEV走行とを実行可能なハイブリッド車両についての評価表示方法であって、
前記ハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示部に表示する地図表示制御工程と、
前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得する今回評価取得工程と、
前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得する過去評価取得工程と、を含み、
前記地図表示制御工程においては、
前記地図上に前記単位区間毎の前記今回評価を示す今回評価アイコンと前記過去評価を示す過去評価アイコンとを併せて表示するとともに、
前記今回評価アイコンおよび前記過去評価アイコンを、前記ハイブリッド車両が前記EV走行によって前記単位区間内の評価区間を走行したことを示すEVアイコンと、前記ハイブリッド車両が前記HV走行によって前記単位区間内の評価区間を走行した場合の燃費の評価を示すHVアイコンと、のいずれかで表現することを特徴とする評価表示方法。
【請求項4】
内燃機関とモータとによって駆動可能であるとともに前記内燃機関の駆動が許可されるHV走行と前記内燃機関の駆動が停止されるEV走行とを実行可能なハイブリッド車両についての評価を表示部に表示させる機能をコンピュータに実現させる評価表示プログラムであって、
前記ハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示部に表示する地図表示制御機能と、
前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得する今回評価取得機能と、
前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得する過去評価取得機能と、前記コンピュータに実現させるとともに、
前記地図表示制御機能により前記コンピュータは、
前記地図上に前記単位区間毎の前記今回評価を示す今回評価アイコンと前記過去評価を示す過去評価アイコンとを併せて表示するとともに、
前記今回評価アイコンおよび前記過去評価アイコンを、前記ハイブリッド車両が前記EV走行によって前記単位区間内の評価区間を走行したことを示すEVアイコンと、前記ハイブリッド車両が前記HV走行によって前記単位区間内の評価区間を走行した場合の燃費の評価を示すHVアイコンと、のいずれかで表現することを特徴とする評価表示プログラム。
【請求項1】
内燃機関とモータとによって駆動可能であるとともに前記内燃機関の駆動が許可されるHV走行と前記内燃機関の駆動が停止されるEV走行とを実行可能なハイブリッド車両についての評価表示システムであって、
前記ハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示部に表示する地図表示制御手段と、
前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得する今回評価取得手段と、
前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得する過去評価取得手段と、を備え、
前記地図表示制御手段は、
前記地図上に前記単位区間毎の前記今回評価を示す今回評価アイコンと前記過去評価を示す過去評価アイコンとを併せて表示するとともに、
前記今回評価アイコンおよび前記過去評価アイコンを、前記ハイブリッド車両が前記EV走行によって前記単位区間内の評価区間を走行したことを示すEVアイコンと、前記ハイブリッド車両が前記HV走行によって前記単位区間内の評価区間を走行した場合の燃費の評価を示すHVアイコンと、のいずれかで表現することを特徴とする評価表示システム。
【請求項2】
前記ハイブリッド車両が備えるバッテリの充電状態を前記今回の走行および前記過去の走行について取得する充電状態取得手段を備え、
前記地図表示制御手段は、前記地図上に前記今回の走行および前記過去の走行において前記バッテリが上限まで充電されていた位置を表示する、
請求項1に記載の評価表示システム。
【請求項3】
内燃機関とモータとによって駆動可能であるとともに前記内燃機関の駆動が許可されるHV走行と前記内燃機関の駆動が停止されるEV走行とを実行可能なハイブリッド車両についての評価表示方法であって、
前記ハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示部に表示する地図表示制御工程と、
前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得する今回評価取得工程と、
前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得する過去評価取得工程と、を含み、
前記地図表示制御工程においては、
前記地図上に前記単位区間毎の前記今回評価を示す今回評価アイコンと前記過去評価を示す過去評価アイコンとを併せて表示するとともに、
前記今回評価アイコンおよび前記過去評価アイコンを、前記ハイブリッド車両が前記EV走行によって前記単位区間内の評価区間を走行したことを示すEVアイコンと、前記ハイブリッド車両が前記HV走行によって前記単位区間内の評価区間を走行した場合の燃費の評価を示すHVアイコンと、のいずれかで表現することを特徴とする評価表示方法。
【請求項4】
内燃機関とモータとによって駆動可能であるとともに前記内燃機関の駆動が許可されるHV走行と前記内燃機関の駆動が停止されるEV走行とを実行可能なハイブリッド車両についての評価を表示部に表示させる機能をコンピュータに実現させる評価表示プログラムであって、
前記ハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示部に表示する地図表示制御機能と、
前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得する今回評価取得機能と、
前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得する過去評価取得機能と、前記コンピュータに実現させるとともに、
前記地図表示制御機能により前記コンピュータは、
前記地図上に前記単位区間毎の前記今回評価を示す今回評価アイコンと前記過去評価を示す過去評価アイコンとを併せて表示するとともに、
前記今回評価アイコンおよび前記過去評価アイコンを、前記ハイブリッド車両が前記EV走行によって前記単位区間内の評価区間を走行したことを示すEVアイコンと、前記ハイブリッド車両が前記HV走行によって前記単位区間内の評価区間を走行した場合の燃費の評価を示すHVアイコンと、のいずれかで表現することを特徴とする評価表示プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−96911(P2013−96911A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−241506(P2011−241506)
【出願日】平成23年11月2日(2011.11.2)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月2日(2011.11.2)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]