
試料の凹凸判定方法、及び荷電粒子線装置
【課題】本発明の目的は、特に試料上に形成されたライン&スペースパターンの凹凸判定に好適な判定方法、及び装置を提供することにある。
【解決手段】荷電粒子線を当該荷電粒子線の光軸に対し斜めになるように荷電粒子線を傾斜、或いは、試料ステージを傾斜して、試料上に走査し、検出信号の荷電粒子線の線走査方向への広がりを計測し、荷電粒子線を光軸に沿って走査したときの広がりと比較し、広がりの増減に基づいて前記走査個所の凹凸状態を判定する。
【解決手段】荷電粒子線を当該荷電粒子線の光軸に対し斜めになるように荷電粒子線を傾斜、或いは、試料ステージを傾斜して、試料上に走査し、検出信号の荷電粒子線の線走査方向への広がりを計測し、荷電粒子線を光軸に沿って走査したときの広がりと比較し、広がりの増減に基づいて前記走査個所の凹凸状態を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はパターンの凹凸判定の判定或いは三次元情報を得る方法に係り、特に半導体ウェハ上に形成されたライン&スペースパターンの凹凸情報を得るに好適な方法、及び装置に関する。
【背景技術】
【0002】
走査電子顕微鏡等の荷電粒子線装置は、微細化の進む半導体ウェハ上に形成されたパターンの測定や観察に好適な装置である。従来、荷電粒子線装置で試料の三次元情報を得る方法として、特開平5−41195号公報に開示されているようなステレオ観察法がある。
【0003】
ステレオ観察法は、傾斜した2枚のステレオ画像を撮影し、その2枚の画像間でステレオマッチングを行い、対応点を求めて行くことで高さを算出し、3次元情報を得るものである。
【0004】
また、特開平5−175496号公報には、試料上のパターン対し、斜めからビームを照射してパターンの寸法測定を行う技術が開示されている。
【0005】
【特許文献1】特開平5−41195号公報
【特許文献2】特開平5−175496号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
走査電子顕微鏡によって、試料上のライン&スペースパターンの測長を行う場合、ラインとスペースの幅がほぼ等しいと、その判別が難しく、間違ってしまうという問題があった。また上記ステレオマッチング法は、走査電子顕微鏡で得られた画像のS/N比,分解能、及び試料の構造等が問題となり、良好な3次元画像を得ることが難しいという問題がある。即ちS/N比や分解能が低いと、2枚の画像のマッチングを採るための対応点を見つけることが難しく、結果としてマッチングの十分にとれていない、ぼやけた像となる場合がある。更にステレオマッチング法は、高度な画像処理を必要とするため、処理時間がかかるという問題もある。
【0007】
また、特開平5−175496号公報に開示の技術もライン&スペースの判定まで言及されていない。
【0008】
本発明の目的は、簡単な手法で試料上に形成された凹凸の判定、或いは3次元情報を得ることにあり、特に試料上に形成されたライン&スペースパターンの凹凸判定に好適な判定方法、及び装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明では、荷電粒子線を当該荷電粒子線の光軸に対し斜めになるように前記荷電粒子線を試料上に走査し、当該走査個所から放出される荷電粒子の検出に基づいて、当該検出信号の前記荷電粒子線の線走査方向への広がりを計測し、前記荷電粒子線を前記光軸に沿って走査したときの前記広がりと比較し、当該広がりの増減に基づいて前記走査個所の凹凸状態を判定する。
【0010】
以上のような構成によれば、荷電粒子線像内の凹凸判定を行うことが容易になり、特にライン&スペースパターンのような同じようなパターンが連続するパターンの凹凸状態を判定することが容易になる。
【0011】
なお、本発明の他の目的、及び他の具体的な構成については、以下の発明の実施の形態の欄で詳細に説明する。
【発明の効果】
【0012】
本発明によれば、容易に試料上の凹凸判定を実現できる。
【発明を実施するための最良の形態】
【0013】
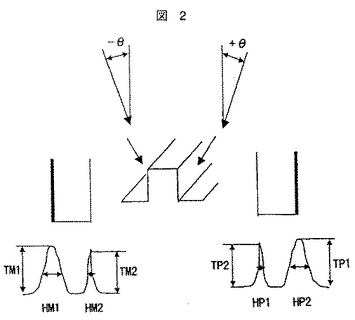
図3は、本発明の画像処理装置の一実施例である電子顕微鏡装置の構成概要のブロック図である。301は電子顕微鏡の鏡体部であり、電子銃302から発せられた電子線303が図には描かれていない電子レンズによって収束され、試料305に照射される。電子線照射によって、試料表面から発生する二次電子、或いは反射電子の強度が電子検出器306
によって検出され、増幅器307で増幅される。
【0014】
304は電子線の位置を移動させる偏向器であり、310の制御用計算機(本発明では制御プロセッサ、或いは制御系と呼ぶこともある)の制御信号308によって電子線を試料表面上でラスタ走査させる。増幅器307から出力される信号を画像処理プロセッサ
309内でAD変換し、デジタル画像データを作る。さらにデジタル画像データから投影処理によってプロファイルを作成する。これ以降デジタル信号波形もプロファイルと呼ぶ。
【0015】
311は、その画像データを表示する表示装置である。また、309は、デジタル画像データを格納する画像メモリと各種の画像処理を行う画像処理プロセッサであり、表示制御を行う表示制御回路を持つ。制御用計算機310には、キーボードやマウス等の入力手段312が接続される。
【0016】
半導体デバイス作成時、ウェハ上に描かれた微細なパターンの線幅を計測する場合に電子顕微鏡装置が使われる。ここで、ウェハ上の線幅を計測する部分がラインもしくはスペースの場合は、ラインとスペースの幅が同じようであると、その区別がつかなくなり、3次元的な情報から区別することが必要とされている。本実施例は、簡便な手法でライン&スペース試料の3次元情報を得ることができる走査電子顕微鏡に係るものであるが、無論それに限られることはなく、集束イオンビーム装置等、他の荷電粒子線装置にも適用が可能である。
【0017】
なお、画像メモリのメモリ位置に対応したアドレス信号が、制御計算機31内で生成され、アナログ変換された後に走査コイル制御電源(図示せず)を経由して、偏向器304に供給される。X方向のアドレス信号は、例えば画像メモリが512×512画素の場合、0から512を繰り返すデジタル信号であり、Y方向のアドレス信号は、X方向のアドレス信号が0から512に到達したときにプラス1される0から512の繰り返しのデジタル信号である。これがアナログ信号に変換される。
【0018】
画像メモリのアドレスと電子線を走査するための偏向信号のアドレスが対応しているので、画像メモリには偏向器304による電子線の偏向領域の二次元像が記録される。なお、画像メモリ内の信号は、読み出しクロックで同期された読み出しアドレス生成回路(図示せず)で時系列に順次読み出すことができる。アドレスに対応して読み出された信号はアナログ変換され、表示装置311の輝度変調信号となる。
【0019】
画像メモリには、S/N比改善のため画像(画像データ)を重ねて(合成して)記憶する機能が備えられている。例えば8回の二次元走査で得られた画像を重ねて記憶することで、1枚の完成した像を形成する。即ち、1回もしくはそれ以上のX―Y走査単位で形成された画像を合成して最終的な画像を形成する。1枚の完成した像を形成するための画像数(フレーム積算数)は任意に設定可能であり、二次電子発生効率等の条件を鑑みて適正な値が設定される。また複数枚数積算して形成した画像を更に複数枚重ねることで、最終的に取得したい画像を形成することもできる。所望の画像数が記憶された時点、或いはその後に一次電子線のブランキングを実行し、画像メモリへの情報入力を中断するようにしても良い。
【0020】
試料305は図示しないステージ上に配置され、試料305電子線と垂直な面内の2方向(X方向,Y方向)に移動することができる。
【0021】
また本発明実施例装置は、検出された二次電子或いは反射電子等に基づいて、ラインプロファイルを形成する機能を備えている。ラインプロファイルは一次電子線を一次元、或いは二次元走査したときの電子検出量、或いは試料像の輝度情報等に基づいて形成されるものであり、得られたラインプロファイルは、例えば半導体ウェハ上に形成されたパターンの寸法測定等に用いられる。
【0022】
なお、図3の説明は制御計算機が走査電子顕微鏡と一体、或いはそれに準ずるものとして説明したが、無論それに限られることはなく、走査電子顕微鏡鏡体とは別に設けられた制御プロセッサで以下に説明するような処理を行っても良い。その際には二次信号検出器13で検出される検出信号を制御プロセッサに伝達したり、制御プロセッサから走査電子顕微鏡のレンズや偏向器等に信号を伝達する伝達媒体と、当該伝達媒体経由で伝達される信号を入出力する入出力端子が必要となる。
【0023】
また、以下に説明する処理を行うプログラムを記憶媒体に登録しておき、画像メモリを有し走査電子顕微鏡に必要な信号を供給する制御プロセッサで、当該プログラムを実行するようにしても良い。
【0024】
〔実施例1〕
図1は、ライン画像における傾斜計測時のエッジプロファイルのピーク部分の変化を表したものである。なお、以下に説明する実施例は、電子線の光軸に対し、偏向器304を用いて電子線を傾斜する例について説明するが、それに限られることはなく、電子線が照射される試料を傾斜することで、試料表面方向の垂線に対して電子線を傾斜して走査するようにしても良い。この場合、チルト機能を有する試料ステージを用いても、電子線鏡筒そのものを傾斜させても良い。また走査用の偏向器とは別の偏向器を用いて電子線を傾斜するようにしても良い。
【0025】
図1に示す様に傾斜量θを変えたときの見かけの幅Wは、傾斜領域の幅Tや段差Hから1式で求められる。また、傾斜時の傾斜部変化量だけに着目すると、段差Hだけに依存する。
【0026】
W=T+H*tanθ (1)
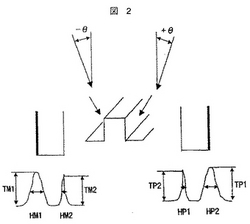
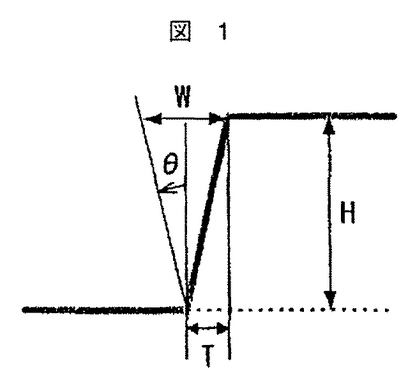
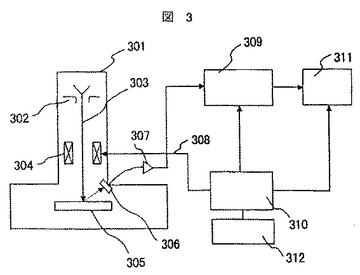
図2は、凸部分を+θ、又は−θの方向から撮影した場合のプロファイル変化を表したものである。ここでは+θ方向プロジェクションの半値幅をHP1,HP2とし、−θ方向プロジェクションの半値幅をHM1,HM2とする。−θ方向から撮影した場合、左側エッジ部分の信号の半値幅(HM1)が大きくなり、+θ方向から撮影した場合、右側エッジ部分の信号の半値幅(HP1)が大きくなる。なお、本実施例ではピークの半値幅を基準にしているが、これに限られることはなく、ピークのどの位置であっても、電子線の傾斜によって長さが増減する個所であれば良い。
【0027】
このように、撮影方向のエッジ信号の半値幅が大きくなるため、この現象を利用すれば、半値幅の増減に基づいて、ライン&スペースの凹凸判定可能になる。
【0028】
即ち、電子線の走査方向において、電子線の光軸に対して電子線を傾斜したときに得られるプロファイルの幅が大きくなったときは、そのプロファイルに相当する個所には電子線の傾斜方向に側面(エッジ)が形成されている部分が存在するものと判断することができる。言い換えれば、検出信号の線走査方向(二次元走査の場合、X方向)への広がりを計測し、光軸に沿って電子線を照射したときに比べて、前期広がりが大きくなったとき、電子線の傾斜方向側にエッジ面があると判断することができる。
【0029】
反対に、プロファイルの幅が小さくなったときには、電子線の傾斜方向から見て裏面
(反対側)に相当する部分と判断することができる。換言すれば、電子線を傾斜して走査したときに現れる2つのピーク幅の一方が大きくなり、他方が小さくなったときには、その間には凹部、或いは凸部が存在することが判る。またこの状態において、電子線が傾斜される側に、幅が増大するピークが存在する場合には凸部が存在し、電子線が傾斜される側に、幅が減少するピークが存在するときは凹部が存在すると判断することができる。
【0030】
以上の構成によれば、複雑な画像処理技術を採用しなくとも、試料上の凹凸判定が可能になる。また、ラインプロファイルを形成するという、画像処理に比較して簡単な方法で凹凸判定を行うことができるので、半導体検査装置の自動測定に組み込むことが容易であり、且つ検査工程のスループット向上にも効果がある。
【0031】
特にライン&スペースパターンのような同じようなパターンが連続するパターンの凹凸状態を判定することが容易になる。また、ライン&スペースを形成する組成に因らず、正確な凹凸判定を行うことができる。ラインパターンとスペースとの間に像質の違いがないような場合であっても正確に凹凸判定を行うことができる。
【0032】
〔実施例2〕
本実施例では凹凸判定の精度をより高める手法として、一方向からだけではなく、少なくとも±θの両方向からの走査を行う例について説明する。
【0033】
電子線によって、左右のエッジ信号の半値幅がもともと異なるパターンの場合等、一方向のみの傾斜走査では半値幅の増減を判断することが困難な場合があるが、±θ方向から撮影したプロファイルを比較すれば、半値幅の増減が左右のピークで逆になるため、判定が容易に行うことができる。
【0034】
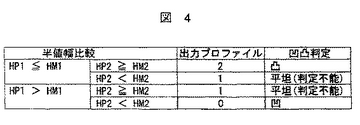
図4は、±θ方向から撮影したプロファイルを使った凹凸判定方法の説明する図である。HM1(第1のピーク) がHP1(第3のピーク) 以上の幅を持つ場合において、HP2
(第4のピーク)がHM2(第2のピーク)以上の幅を持つと判断された場合には、そのパターンは凸パターンと判定するようにし、HM1がHP1より小さい場合において、
HP2がHM2より小さいと判断される場合には、そのパターンを凹パターンと判定するようにすれば、上述のように高精度なライン&スペースパターンの凹凸判定を行うことが可能になる。なお、本実施例ではHP1≦HM1であり且つHP2≧HM2のとき、及びHP1>HM1であり且つHP2<HM2のとき、2つのピーク間の凹凸推定を行う例について説明したが、これに限られることはなく、例えば「HP1<HM1,HP2>HM2⇒凸部」「HP1≧HM1,HP2≦HM2⇒凹部」と判定するようにしても良い。これは後述する実施例でも同じである。
【0035】
またパターンによってはプロファイルの左右のエッジ高さ((TM1またはTM2)と(TP1またはTP2))を用いて判定することが可能である。他に半値幅と高さを掛け合わせた値(HM1*TM1)や面積を用いることも可能である。
【0036】
〔実施例3〕
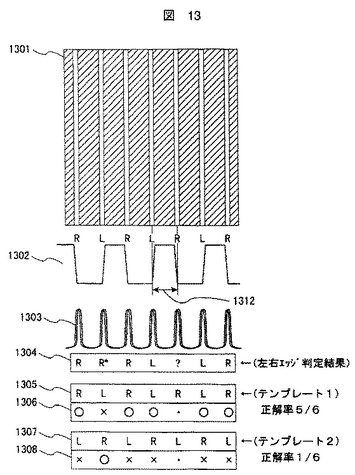
次に、ライン&スペースパターンが等間隔で且つ複数である場合に、より好適な凹凸判定法を、図13を用いて説明する。
【0037】
(1301)は走査電子顕微鏡画像のコントラストがエッジ効果でのみ得られるような画像で真上から電子線を走査した画像である。凹凸判定が必要なパターンはこのようなパターンであり、装置の制御誤差やパターン形状差異によって画像の中央に来るべき測定位置(特徴部)が例えばパターン断面図(1302)の測定位置(1312)のようにずれた場合、画像(1301)から測定位置(1312)を認識することは困難である。
【0038】
そこで前述の方法で電子線を鉛直方向±で傾斜して得られた2つのプロファイル(1303)から半値幅やピーク高さを用いて各エッジがラインパターンの左右どちらのエッジかを判定する。
【0039】
例えば7つエッジの左右判定結果が(1304)のようになったとする。ここで記号Rは右エッジを示し、記号Lは左エッジを示す。記号?は半値幅の差やピーク高さの差がなく判定できなかった場合を示す。また(1304)中の記号R*はパターン形状のばらつきやノイズによって誤ってエッジ判定した例である。
【0040】
次に認識するパターンはライン&スペースパターンであるという前提を用いて7つのエッジについて2つのテンプレート(1305)および(1307)を作成する。それぞれのテンプレートを左右エッジ判定結果(1304)と比較し、正解の多い方のテンプレート(ここでは(1305))を正しいとして選択する。即ちテンプレートで規定される条件(本実施例の場合、ラインとスペースの配置)の正解率が高いテンプレートによって、前記試料上の特徴部を特定する。このとき正しいとしたテンプレートを用いて判定できなかった記号?のエッジや判定を誤ったエッジを修正することができる。本方式によると複数エッジを用いて凹凸を判定するため凹凸判定の信頼性を向上することができる。
【0041】
なお、本実施例ではラインとスペースが交互に連続するライン&スペースパターンのテンプレートを用いる例について説明したが、これに限られることはなく、凹凸をなすパターンであれば、相応のテンプレートの作成によって、試料上の凹凸判定の確認を行うことが可能である。なお、本実施例ではテンプレートが2つの例について説明したが3つ以上であっても良い。
【0042】
〔実施例4〕
実施例3ではテンプレートを参照することで、判定不能なエッジの情報を推定する方法について説明したが、テンプレート1,2の適用に基づく判定結果の正解率がいずれも高いか、いずれも低い場合、走査電子顕微鏡の光学条件に問題があるか、或いはライン&スペースパターンそのものに問題がある可能性がある。実施例3で説明したテンプレートによる凹凸の正解率判定技術では、原理上いずれか一方の正解率が高く、他方の正解率が低いという傾向がでる筈である。即ち、いずれの正解率も高い場合、或いは低い場合には走査電子顕微鏡の光学条件やライン&スペースパターンそのものに問題がある可能性がある。
【0043】
このような場合、左右のエッジ判定結果に、ラインプロファイル,走査電子顕微鏡像,走査電子顕微鏡の光学条件、或いは半導体ウェハの製造履歴等の少なくとも1つを関連付けて記憶し、その後読み出せるようなシーケンスを組んでおけば、判定ミスの原因追及が容易になる。
【0044】
凹凸判定が上手くいかない場合、それ以上の測定が困難である場合が多いのでエラーメッセージを発生させて、操作者に注意を促すようにしても良い。更に半導体ウェハのように1枚のウェハに多数の測定点、或いは観察点があるような試料の場合には、エラーが発生した部分の測定や観察をスキップして、次の測定、或いは観察を行うようにしても良い。
【0045】
また半導体ウェハの場合、判定不能な個所が2点、或いは3点以上に及ぶ場合は、走査電子顕微鏡に何かしらの問題があるか、半導体ウェハ全体に問題が及んでいる可能性があるので、走査電子顕微鏡による測定或いは観察の中断、又はその半導体ウェハの測定、或いは観察の中断を行うようにしても良い。
【0046】
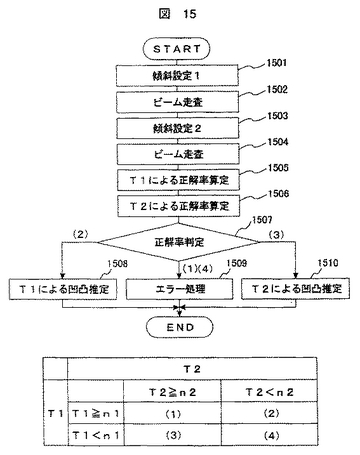
図15は、テンプレートによる凹凸判定の処理フローである。
【0047】
ステップ1501〜1504では、ライン&スペースパターンのエッジ方向に対し垂直な方向のラインプロファイルが形成できるように、電子線を走査する。本実施例では実施例2で説明した±θからの電子線走査による凹凸判定を行う。ステップ1505では、テンプレート1による正解率の算定を行う。ステップ1506では、テンプレート2による正解率算定を行う。
【0048】
この際、テンプレート1の正解率T1が所定値n1以上であり、テンプレート2の正解率T2が所定値n2より小さい場合(図15下表(2))、そのパターンはテンプレート1によって推定されるパターンであると判断される(ステップ1508)。また、テンプレート1の正解率T1が所定値n1より小さく、テンプレート2の正解率T2が所定値
n2以上の場合(図15下表(3))、そのパターンはテンプレート2によって推定されるパターンであると判断される(ステップ1509)。上記2つの条件に当てはまらない場合(図15下表(1)(4))は、測定不能と判断しエラー処理を行う(ステップ1509)。
【0049】
上記実施例では、一方のテンプレート(例えばテンプレート1)はそのパターンに相当するものであり、他方のテンプレート(例えばテンプレート2)はそのパターンとは異なる形状を規定している。即ち異なる形状、或いは条件(画像データ等)を規定したテンプレートによる情報(ラインプロファイルや画像データ等)の選別によって、判断の確度をより高めることができる。
【0050】
図15下表(1)(4)と判断された場合、上述したように原因追及のために左右のエッジ判定結果に、ラインプロファイル,走査電子顕微鏡像,走査電子顕微鏡の光学条件、或いは半導体ウェハの製造履歴等を関連付けて記憶し、その後読み出せるようなシーケンスを組んでおけば、パターン推定ができなかった原因を特定することが容易になり、その後の測定、或いは製造工程へのフィードバックを行うことが容易になる。
【0051】
特にラインパターンが連続して同じ方向に傾いて形成されているような場合、例えば半導体製造ライン中の光学式露光装置の装置条件に誤りがある場合が考えられる。よって、その旨を付帯情報として記憶しておけば、原因特定をより容易に行うことができる。パターンが特定方向に傾いている状態は、例えば一方の傾斜方向から電子線を照射したときだけ、電子線の傾斜方向のパターンエッジによって形成されるプロファイルの半値幅が太くなる現象に基づいて発見することができる。
【0052】
〔実施例5〕
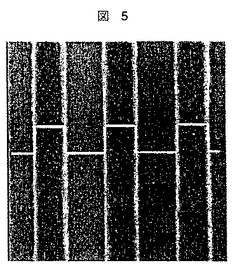
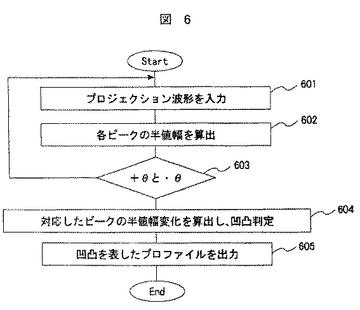
図5は、得られた凹凸プロファイルを撮影した画像上に重ねて表示した例である。このように表示すれば、走査電子顕微鏡像上の凹凸判定が困難な試料像上でライン、或いはスペースの判定を容易に行うことができる。図6は、ライン&スペース画像の凹凸判定の処理フローである。601で各傾斜方向から撮影したプロジェクション波形を入力し、602で各ピークの半値幅を算出する。603で601から602までの処理を±θ方向のプロジェクション波形に対して行う。604では、±θ方向の対応したピークの半値幅変化を算出し、その変化から図4に示した判定方法で凹凸判定を行う。605では、凹凸をあらわしたプロファイルを出力する。
【0053】
〔実施例6〕
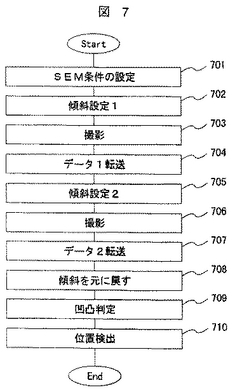
図7は、ライン&スペース画像で測長を行う場合にラインもしくは、スペースの位置特定に本発明を用いた場合の処理フローである。701で走査型電子顕微鏡(SEM)の計測条件を設定し、702でビーム照射角度もしくはステージ角度を+θ傾斜させる。703で撮影を行う。凹凸判定には、プロジェクション波形を用いるため、ここでの撮影は1フレーム画像全体を撮影しても良いし、数ライン分のデータを計測しても良い。704では、703で計測したデータを画像処理プロセッサに転送する。705で、702と同様な方法でビーム照射角度もしくはステージ角度を−θ傾斜させ、706で撮影を行い、707でデータを転送する。708では、705での傾斜を元に戻す。709では、704と
707で転送されたデータから画像処理プロセッサで凹凸判定を行う。
【0054】
最後に710でライン部であれば凸部分の座標、スペース部分であれば凹部分の座標を出力する。ここで、凹凸部分が複数検出された場合は、一番中央に近い座標を出力にしてもよい。
【0055】
以上のような構成によれば、パターンマッチング等の複雑な画像処理技術を用いることなく、簡単に視野合わせや測長,検査位置合わせを正確に行うことができる。
【0056】
〔実施例7〕
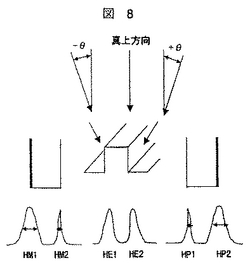
図8は、凸部を真上方向と+θ方向もしくは−θ方向から撮影した場合のプロファイル変化を表したものである。ここで、真上方向プロファイルの半値幅をHE1,HE2とし、+θ方向プロファイルの半値幅をHP1,HP2とし、−θ方向プロファイルの半値幅をHM1,HM2とする。
【0057】
図2で説明したように真上方向と+θ方向もしくは−θ方向の2方向から撮影した半値幅の変化を比較する事で1方向からでは難しい凹凸判定が可能になる。また本実施例の場合、1回の傾斜で凹凸判定を行うことができるので、±θに電子線を傾斜する場合と比較して、処理速度を向上することが可能になる。
【0058】
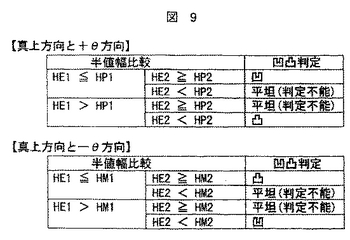
図9は、真上方向と正負方向のどちらか1方向から撮影したプロファイルを使った凹凸判定方法である。
【0059】
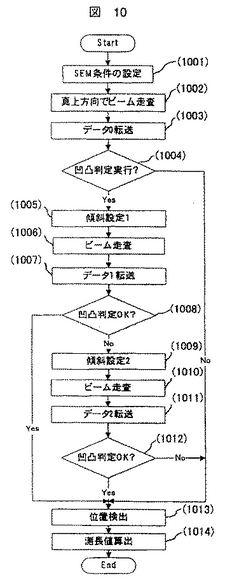
真上方向と正負方向のどちらか1方向から撮影したプロファイルを使った凹凸判定方法で測長を行う場合に、ラインもしくはスペースの位置特定に本発明を用いた場合の処理フローを図10および図11を用いて説明する。
【0060】
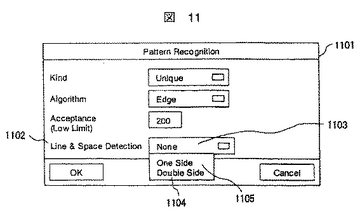
(1001)で走査型電子顕微鏡(SEM)の観察条件を設定し、(1002)で真上方向からビームを走査してプロファイルまたは画像を画像処理プロセッサ309にデータ0として転送する(1003)。このときパターン検出条件設定画面(1101)の設定項目Line&Space Detection(1102)の条件None(1103),One Side(1105),Double Side(1104)を参照する。ただし、この条件は予め設定されている。
【0061】
(1004)の凹凸判定実行でNone(1103)であれば凹凸判定を実行しないでデータ0を用いて位置検出(1013)を実行する。もしOne Side(1105),DoubleSide(1104)であれば、(1005)で傾斜設定1をした後、(1006)でビームを走査してプロファイルまたは画像を画像処理プロセッサ309にデータ1として転送する(1007)。
【0062】
(1008)でデータ0とデータ1を用いて凹凸判定を実行する。このときの判定方法は図9で述べた方式である。(1008)で凹凸判定可能ならここで求めた凹凸プロファイルを用いて位置検出(1013)を実行する。できなかった場合は傾斜設定1(1005)と反対の方向にビーム傾斜設定2する(1009)。ビーム傾斜後、同様にビームを走査してデータ2として画像処理プロセッサ309に転送する(1010)(1011)。
(1012)でデータ1とデータ2を用いて凹凸判定を実行し、判定可能なら凹凸プロファイルを用いて位置検出(1013)を実行する。
【0063】
できなければデータ0またはデータ1,データ2もしくは合成したデータを用いて位置検出する。位置検出後、測長値を算出する(1014)。以上のように処理することで測長値を算出するデータ0はビーム照射を最小限に押さえることができ、測長再現性の向上につながる。また、ライン幅とスペース幅がほぼ同じでラインとスペースの区別が付きにくいという判定は登録時にユーザが設定でき、凹凸判定のためのビーム照射によるパターンのダメージを押さえることができる。
【0064】
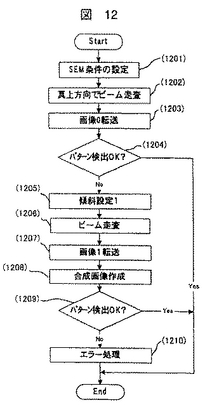
〔実施例8〕
次にビーム傾斜した画像を用いてパターン検出する方法を、図12を用いて説明する。(1201)で走査型電子顕微鏡(SEM)の観察条件を設定し、(1202)において真上方向でビームを走査して画像処理プロセッサ309に画像0を転送する(1203)。画像処理プロセッサ309はあらかじめ登録されているテンプレートを参照して正規化相関などのサーチアルゴリズムを用いてパターン検出を実行する(1204)。
【0065】
あらかじめ設定しておいたしきい値に基づいてパターン検出の成功を判定し成功なら終了する。失敗と判定された場合、登録時に設定しておいた方向または計算で求めた方向のビームを傾斜して(1205)、走査し画像1を得る(1206)。これを画像処理プロセッサ309に転送して(1207)、傾斜していない画像0と合成する。合成は画像0と画像1を足し合わせてもよいし、画像1のみを使用してもよい。
【0066】
合成画像を用いて(1204)と同様にパターン検出を実行する(1210)。本方式では、また(1202)から(1204)を実行せずに傾斜画像のみでパターン検出することもできる。以上のようにビームを傾斜してパターン検出をすることで得られる画像のエッジの情報量が増えて、少ないフレーム数でパターン検出が可能になり、スループットが改善される。またビーム照射量を減らすことができビーム照射によるダメージを軽減できる。
【0067】
登録時に計算で傾斜方向を決める場合は、テンプレート画像を上下左右方向や斜め方向も加えた4方向にそれぞれ微分して絶対値の総和を求め、最大となった方向とのなす角度が90度となる方向を選ぶ。これは特定の方向にエッジが偏っている場合に有効である。
【0068】
〔実施例9〕
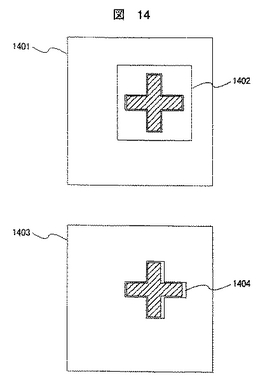
電子線傾斜をパターン検出に用いる他の方法を、図14を用いて説明する。通常、位置決めなどでテンプレート画像を用いて画像認識を行う場合、あらかじめテンプレートを登録しておき検査時にそのテンプレートとマッチングを行う。
【0069】
テンプレート登録において真上から走査した画像(1402)上で入力手段312を用いてテンプレートとなる領域(1402)を選択する。この選択された部分画像を画像処理プロセッサ309に転送し、方向を求めるオペレータ(例えばSobelフィルタなど)を用いて方向画像を計算する。
【0070】
次に得られた方向画像の分布図を作成し、あらかじめ定めたしきい値以上の角度(複数でもよい)を求める。これらの角度はパターンエッジの分布を示すため、この方向に電子線を傾斜するとエッジ効果により情報量の多い画像が得られる。(1403)は電子線を鉛直方向から右に傾斜して得られた画像であり、パターン(1404)は右側のエッジが強調されている。即ちエッジが強調される個所を抽出することでパターン形状を特定することができる。
【0071】
同様の処理を上下左右方向や斜め方向も加えた複数方向について行うこともできる。また同様の処理を画像上下に突き抜けたラインパターンに適用すると左右の傾斜のみでよいことが判定できる。以上のようにして求めた傾斜画像を登録して検査時、テンプレートマッチングを行う。本方式によって低段差のパターンを信頼性よく認識することが可能となる。予め、パターンの形状が判明している場合では、エッジを強調できる方向(理想的にはエッジの長手方向に対し、垂直な方向)に選択的に傾斜を行うようにすれば、無駄な傾斜を行うことなく、パターンエッジを明確にすることができる。
【0072】
〔実施例10〕
これまでの実施例では、電子線を傾斜して走査した結果得られるラインプロファイルのピーク幅の増減に基づいて、試料上の凹凸を判定する技術について説明したが、本実施例においては、電子線の焦点位置を変えながら信号計測を行い、それぞれの画像でのラインとスペース領域の焦点評価値を比較することでラインとスペースから構成される画像の凹凸判定を行う例について説明する。
【0073】
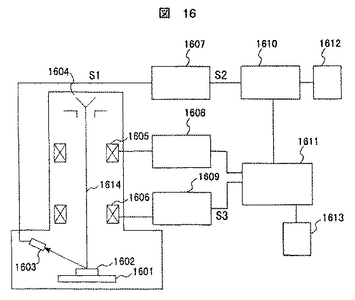
図16は、本発明の画像処理装置の一実施例である走査電子顕微鏡装置の構成概要のブロック図である。この走査電子顕微鏡には自動焦点制御機能が組み込まれている。図16において、1601は試料台、1602は試料台上の撮影対象試料、1604は陰極、
1605は走査コイル、1606は電子レンズ、1608は走査コイル制御回路、1609はレンズ制御回路である。電子ビーム1614は、走査コイル1605によって試料1602上を走査され、試料1602から発せられた電子は検出器1603で検出される。検出器
1603からの信号S1がAD変換器1607に入力されてデジタル信号S2へと変換される。S2のデジタル信号は、画像処理プロセッサ1610に入力され、画像処理と特徴量の抽出が行われ、その結果は制御用計算機1611へ送られる。また、処理された画像は、表示装置1612へ送られ表示される。制御用計算機1611からの焦点制御信号
S3は、レンズ制御回路1609に入力されレンズ1606の励磁電流を調節することで焦点制御を行うことができる。1613は、制御用計算機1611に接続される入力手段である。
【0074】
以上の様に構成されている走査電子顕微鏡での自動焦点制御は、電子レンズの焦点条件を自動的に最適値に設定する制御であり、その方法は、電子レンズの条件を変化させながら、複数枚のフレーム走査を行い得られた2次電子や反射電子の検出信号から焦点評価値を算出,評価し、最適値を電子レンズの条件に設定するものである。
【0075】
半導体デバイス作成時、ウェハ上に描かれた微細なパターンの線幅を計測する場合に電子顕微鏡装置が使われる。ここで、ウェハ上の線幅を計測する部分がラインもしくはスペースの場合は、ラインとスペースの幅が同じようであると、その区別がつかなくなり、3次元的な情報から区別することが必要とされる。本発明は、簡便な手法でラインとスペース試料の凹凸情報を得ることができる荷電粒子線装置に関するものであるため、図16の走査電子顕微鏡装置に適応することが可能である。
【0076】
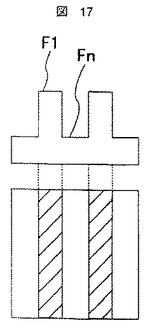
図17は、ラインとパターン試料の凹凸部分に焦点が合う場合をあらわすたものである。F1は、ライン部分(凸部分)に焦点があった場合であり、Fnは、スペース部分(凹部分)に焦点があった場合である。このように凹凸部分では焦点位置が異なるので、その情報を利用することで凹凸を判定する。
【0077】
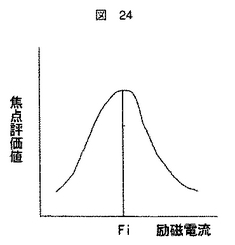
図24は、電子レンズの励磁電流を変化させた場合の焦点評価値の変化を示した図である。ここで、焦点評価値には、画素間の微分値,2次微分値,ソーベル値,ラプラシアン値等が利用される。電子レンズの条件を変えながら撮影した画像毎に焦点評価値を算出すると電子レンズの焦点が合った条件で焦点評価値が最大値となる。図24では、電子レンズの励磁電流値がFiの時、フォーカス評価値が最大値となるため、Fiが焦点のあった条件である。
【0078】
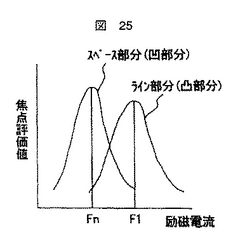
図25にライン部分とスペース部分の励磁電流と焦点評価値の関係を示す。図24で説明したように焦点が合った条件で、焦点評価値が最大となるため、ライン部分(凸部分)に焦点が合った場合、ライン部分(凸部分)の焦点評価値は最大となるが、スペース部分(凹部分)の焦点は合っていないため、焦点評価値は小さくなる。反対のことがスペース部分(凹部分)に焦点が合った場合にも言える。
【0079】
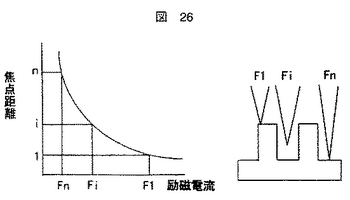
図26に励磁電流と焦点距離の関係を示す。図26の様に励磁電流により焦点距離が決まるので、合焦点時の励磁電流がわかれば、その励磁電流の値から焦点距離が推測できることになる。つまり、異なる2つの領域に対し、それぞれの合焦点時の励磁電流がわかれば、その2つの領域の高低は判断できることになる。
【0080】
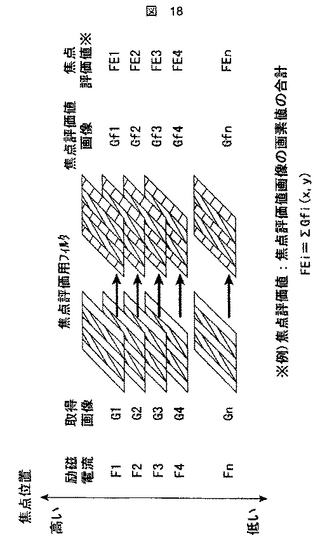
図18に焦点評価値を算出するまでの概略図を示す。焦点位置を変えるため励磁電流をF1〜Fnまで変化させ、それに対した画像G1〜Gnまでを取得する。次にG1〜Gnの画像に対して、それぞれ焦点評価用フィルタ(微分,2次微分,ソーベル,ラプラシアン等)を施し、焦点評価画像Gf1〜Gf2を作成し、焦点評価値FE1〜FEnを算出する。ここで、焦点評価値としては、焦点評価値画像の全画素値の合計,その平均値,分散値等を用いることができる。ここまでの工程は、通常、オートフォーカスとして実行され、FE1〜FEnの最大時の励磁電流値を合焦点時の励磁電流とする。
【0081】
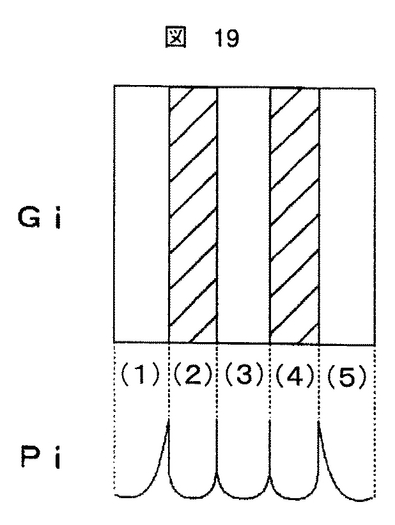
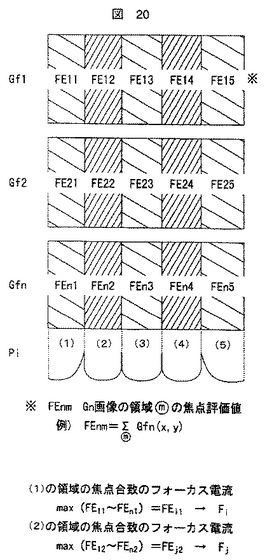
図19にラインとスペース画像におけるプロジェクション波形を示す。電子顕微鏡画像では、エッジ効果により、ラインの端部分が高輝度に画像化される。したがって、そのプロジェクション波形は、図19の様にラインとスペースの境界でピークを示すため、ピークに挟まれた部分がラインもしくはスペースであることがわかる。
【0082】
図20にライン部分とスペース部分の焦点評価値の算出方法を示す。オートフォーカスでの合焦点画像から図19に示す様にプロジェクション波形を求め、焦点評価値を算出する領域(1)〜(5)までを決定する。焦点評価値画像Gf1〜Gfnのそれぞれの画像の(1)〜(5)の領域で焦点評価値FE11〜FEn5を算出する。次に(1)の領域に対して、FE11〜FEn1の最大値(FEi1)を求め、それに対応する励磁電流から(1)の領域の焦点合致の励磁電流値(Fi)を求める。同様に(2)〜(5)まで行い、それぞれの領域での焦点合致の励磁電流を求める。(1)〜(5)の焦点合致のフォーカス電流値の大小から、その領域の焦点距離を求め、領域の高低を判断し、凹凸を判定する。
【0083】
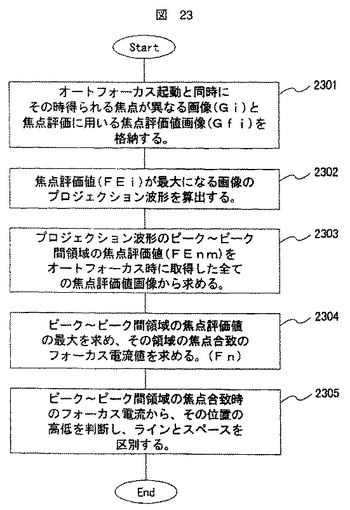
図23に本発明の一実施例である処理フローを示す。2301が図18で説明した焦点の異なる画像(Gi)と焦点評価画像(Gfi)を求める部分であり、この部分はオートフォーカスと同時に実行可能である。2302は、図19で説明した焦点評価値を算出し、焦点合致の励磁電流を求め、それに対応する画像からプロジェクション波形を求める部分である。2303は、図20で説明したピーク間領域(1)〜(5)の焦点評価値
(FEmn)を求める部分である。2304は、図21で説明したピーク間領域(1)〜(5)の焦点合致の励磁電流値を求める部分である。2305は、2304で求めた励磁電流値から(1)〜(5)の高低を判断し、凹凸を判定する部分である。
【0084】
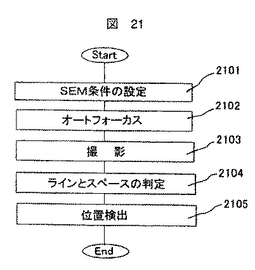
図21は、ラインとスペース画像で測長を行う場合にラインもしくはスペースの位置特定に本発明を用いた場合の処理フローである。2101で走査型電子顕微鏡(SEM)の計測条件を設定し、2102でオートフォーカスを行い、2103で撮影を行う。2104では、図23に示す処理フローに従い、凹凸判定を行う。最後に2105でライン部であれば凸部分の座標、スペース部分であれば凹部分の座標を出力する。ここで、凹凸部分が複数検出された場合は、一番中央に近い座標を出力にしてもよい。
【0085】
図22は、得られた凹凸プロファイルを撮影した画像上に重ねて表示した例である。
【0086】
本実施例では、ライン&スペースの凹凸判定を、オートフォーカス時に取得する画像からラインとスペースに対応する部分の評点評価値を算出し、焦点合致時の励磁電流から焦点距離を求め、その値から画像の凹凸情報を得るため、マッチング処理等の複雑な画像処理を用いることなく簡便な方法で凹凸情報を得ることができる。また、得られた凹凸情報を位置決定に用いるため、ライン&スペース画像での測長ポイントの特定間違いを減少させることができる。また、オートフォーカスのタイミングで必要な情報を収集できるので、他のタイミングで、凹凸情報を得るための新たな工程を設ける必要がなく、スループット向上にも寄与できる。
【図面の簡単な説明】
【0087】
【図1】ラインプロファイルにおける傾斜計測時のエッジの変化を示す図。
【図2】凸部分を±θの方向から撮影した場合のプロファイル変化を示す図。
【図3】本発明の一実施例である走査電子顕微鏡の概略図。
【図4】±θ方向から撮影したプロファイルを使った凹凸判定方法を説明する図。
【図5】得られた凹凸プロファイルを撮影した画像上に重ねて表示した例を示す図。
【図6】ライン&スペース画像の凹凸判定の処理フロー。
【図7】ラインもしくはスペースの位置特定に本発明を用いた場合の処理フロー。
【図8】凸部を真上方向と+θ方向もしくは−θ方向から撮影した場合のプロファイル変化を示す図。
【図9】真上方向と正負方向のどちらか1方向から撮影したプロファイルを使った凹凸判定方法を示す図。
【図10】ラインもしくはスペースの位置特定に本発明を用いた場合の処理フロー。
【図11】パターン検出条件設定画面。
【図12】ビーム傾斜して得られた画像を用いてパターン検出する場合の処理フロー。
【図13】テンプレートを用いた凹凸判定法を説明する図。
【図14】複数方向のビーム傾斜によって、パターンのエッジを強調する例を説明する図。
【図15】テンプレートによる凹凸判定の処理フロー。
【図16】本発明の一実施例である走査電子顕微鏡装置の構成概略図。
【図17】ラインとパターン試料の凹凸部分に焦点が合う場合をあらわした図。
【図18】焦点評価値を算出するまでの概略図。
【図19】ラインとスペース画像におけるプロジェクション波形を示す図。
【図20】ライン部分とスペース部分の焦点評価値の算出方法を示す図。
【図21】ラインもしくはスペースの位置特定に本発明を用いた場合の処理法を示す図。
【図22】得られた凹凸プロファイルを撮影した画像上に重ねて表示した例を示す図。
【図23】本発明の一実施例である処理フローを示す図。
【図24】電子レンズの励磁電流を変化させた場合の焦点評価値の変化を示した図。
【図25】ライン部分とスペース部分の励磁電流と焦点評価値の関係を示す図。
【図26】励磁電流と焦点距離の関係を示す図。
【符号の説明】
【0088】
301…電子顕微鏡の鏡体部、302…電子銃、303…電子線、304…偏向器、
305…試料、306…電子検出器、307…増幅器、308…制御信号、309…画像処理プロセッサ、310…制御用計算機、311…表示装置、312…入力手段。
【技術分野】
【0001】
本発明はパターンの凹凸判定の判定或いは三次元情報を得る方法に係り、特に半導体ウェハ上に形成されたライン&スペースパターンの凹凸情報を得るに好適な方法、及び装置に関する。
【背景技術】
【0002】
走査電子顕微鏡等の荷電粒子線装置は、微細化の進む半導体ウェハ上に形成されたパターンの測定や観察に好適な装置である。従来、荷電粒子線装置で試料の三次元情報を得る方法として、特開平5−41195号公報に開示されているようなステレオ観察法がある。
【0003】
ステレオ観察法は、傾斜した2枚のステレオ画像を撮影し、その2枚の画像間でステレオマッチングを行い、対応点を求めて行くことで高さを算出し、3次元情報を得るものである。
【0004】
また、特開平5−175496号公報には、試料上のパターン対し、斜めからビームを照射してパターンの寸法測定を行う技術が開示されている。
【0005】
【特許文献1】特開平5−41195号公報
【特許文献2】特開平5−175496号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
走査電子顕微鏡によって、試料上のライン&スペースパターンの測長を行う場合、ラインとスペースの幅がほぼ等しいと、その判別が難しく、間違ってしまうという問題があった。また上記ステレオマッチング法は、走査電子顕微鏡で得られた画像のS/N比,分解能、及び試料の構造等が問題となり、良好な3次元画像を得ることが難しいという問題がある。即ちS/N比や分解能が低いと、2枚の画像のマッチングを採るための対応点を見つけることが難しく、結果としてマッチングの十分にとれていない、ぼやけた像となる場合がある。更にステレオマッチング法は、高度な画像処理を必要とするため、処理時間がかかるという問題もある。
【0007】
また、特開平5−175496号公報に開示の技術もライン&スペースの判定まで言及されていない。
【0008】
本発明の目的は、簡単な手法で試料上に形成された凹凸の判定、或いは3次元情報を得ることにあり、特に試料上に形成されたライン&スペースパターンの凹凸判定に好適な判定方法、及び装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明では、荷電粒子線を当該荷電粒子線の光軸に対し斜めになるように前記荷電粒子線を試料上に走査し、当該走査個所から放出される荷電粒子の検出に基づいて、当該検出信号の前記荷電粒子線の線走査方向への広がりを計測し、前記荷電粒子線を前記光軸に沿って走査したときの前記広がりと比較し、当該広がりの増減に基づいて前記走査個所の凹凸状態を判定する。
【0010】
以上のような構成によれば、荷電粒子線像内の凹凸判定を行うことが容易になり、特にライン&スペースパターンのような同じようなパターンが連続するパターンの凹凸状態を判定することが容易になる。
【0011】
なお、本発明の他の目的、及び他の具体的な構成については、以下の発明の実施の形態の欄で詳細に説明する。
【発明の効果】
【0012】
本発明によれば、容易に試料上の凹凸判定を実現できる。
【発明を実施するための最良の形態】
【0013】
図3は、本発明の画像処理装置の一実施例である電子顕微鏡装置の構成概要のブロック図である。301は電子顕微鏡の鏡体部であり、電子銃302から発せられた電子線303が図には描かれていない電子レンズによって収束され、試料305に照射される。電子線照射によって、試料表面から発生する二次電子、或いは反射電子の強度が電子検出器306
によって検出され、増幅器307で増幅される。
【0014】
304は電子線の位置を移動させる偏向器であり、310の制御用計算機(本発明では制御プロセッサ、或いは制御系と呼ぶこともある)の制御信号308によって電子線を試料表面上でラスタ走査させる。増幅器307から出力される信号を画像処理プロセッサ
309内でAD変換し、デジタル画像データを作る。さらにデジタル画像データから投影処理によってプロファイルを作成する。これ以降デジタル信号波形もプロファイルと呼ぶ。
【0015】
311は、その画像データを表示する表示装置である。また、309は、デジタル画像データを格納する画像メモリと各種の画像処理を行う画像処理プロセッサであり、表示制御を行う表示制御回路を持つ。制御用計算機310には、キーボードやマウス等の入力手段312が接続される。
【0016】
半導体デバイス作成時、ウェハ上に描かれた微細なパターンの線幅を計測する場合に電子顕微鏡装置が使われる。ここで、ウェハ上の線幅を計測する部分がラインもしくはスペースの場合は、ラインとスペースの幅が同じようであると、その区別がつかなくなり、3次元的な情報から区別することが必要とされている。本実施例は、簡便な手法でライン&スペース試料の3次元情報を得ることができる走査電子顕微鏡に係るものであるが、無論それに限られることはなく、集束イオンビーム装置等、他の荷電粒子線装置にも適用が可能である。
【0017】
なお、画像メモリのメモリ位置に対応したアドレス信号が、制御計算機31内で生成され、アナログ変換された後に走査コイル制御電源(図示せず)を経由して、偏向器304に供給される。X方向のアドレス信号は、例えば画像メモリが512×512画素の場合、0から512を繰り返すデジタル信号であり、Y方向のアドレス信号は、X方向のアドレス信号が0から512に到達したときにプラス1される0から512の繰り返しのデジタル信号である。これがアナログ信号に変換される。
【0018】
画像メモリのアドレスと電子線を走査するための偏向信号のアドレスが対応しているので、画像メモリには偏向器304による電子線の偏向領域の二次元像が記録される。なお、画像メモリ内の信号は、読み出しクロックで同期された読み出しアドレス生成回路(図示せず)で時系列に順次読み出すことができる。アドレスに対応して読み出された信号はアナログ変換され、表示装置311の輝度変調信号となる。
【0019】
画像メモリには、S/N比改善のため画像(画像データ)を重ねて(合成して)記憶する機能が備えられている。例えば8回の二次元走査で得られた画像を重ねて記憶することで、1枚の完成した像を形成する。即ち、1回もしくはそれ以上のX―Y走査単位で形成された画像を合成して最終的な画像を形成する。1枚の完成した像を形成するための画像数(フレーム積算数)は任意に設定可能であり、二次電子発生効率等の条件を鑑みて適正な値が設定される。また複数枚数積算して形成した画像を更に複数枚重ねることで、最終的に取得したい画像を形成することもできる。所望の画像数が記憶された時点、或いはその後に一次電子線のブランキングを実行し、画像メモリへの情報入力を中断するようにしても良い。
【0020】
試料305は図示しないステージ上に配置され、試料305電子線と垂直な面内の2方向(X方向,Y方向)に移動することができる。
【0021】
また本発明実施例装置は、検出された二次電子或いは反射電子等に基づいて、ラインプロファイルを形成する機能を備えている。ラインプロファイルは一次電子線を一次元、或いは二次元走査したときの電子検出量、或いは試料像の輝度情報等に基づいて形成されるものであり、得られたラインプロファイルは、例えば半導体ウェハ上に形成されたパターンの寸法測定等に用いられる。
【0022】
なお、図3の説明は制御計算機が走査電子顕微鏡と一体、或いはそれに準ずるものとして説明したが、無論それに限られることはなく、走査電子顕微鏡鏡体とは別に設けられた制御プロセッサで以下に説明するような処理を行っても良い。その際には二次信号検出器13で検出される検出信号を制御プロセッサに伝達したり、制御プロセッサから走査電子顕微鏡のレンズや偏向器等に信号を伝達する伝達媒体と、当該伝達媒体経由で伝達される信号を入出力する入出力端子が必要となる。
【0023】
また、以下に説明する処理を行うプログラムを記憶媒体に登録しておき、画像メモリを有し走査電子顕微鏡に必要な信号を供給する制御プロセッサで、当該プログラムを実行するようにしても良い。
【0024】
〔実施例1〕
図1は、ライン画像における傾斜計測時のエッジプロファイルのピーク部分の変化を表したものである。なお、以下に説明する実施例は、電子線の光軸に対し、偏向器304を用いて電子線を傾斜する例について説明するが、それに限られることはなく、電子線が照射される試料を傾斜することで、試料表面方向の垂線に対して電子線を傾斜して走査するようにしても良い。この場合、チルト機能を有する試料ステージを用いても、電子線鏡筒そのものを傾斜させても良い。また走査用の偏向器とは別の偏向器を用いて電子線を傾斜するようにしても良い。
【0025】
図1に示す様に傾斜量θを変えたときの見かけの幅Wは、傾斜領域の幅Tや段差Hから1式で求められる。また、傾斜時の傾斜部変化量だけに着目すると、段差Hだけに依存する。
【0026】
W=T+H*tanθ (1)
図2は、凸部分を+θ、又は−θの方向から撮影した場合のプロファイル変化を表したものである。ここでは+θ方向プロジェクションの半値幅をHP1,HP2とし、−θ方向プロジェクションの半値幅をHM1,HM2とする。−θ方向から撮影した場合、左側エッジ部分の信号の半値幅(HM1)が大きくなり、+θ方向から撮影した場合、右側エッジ部分の信号の半値幅(HP1)が大きくなる。なお、本実施例ではピークの半値幅を基準にしているが、これに限られることはなく、ピークのどの位置であっても、電子線の傾斜によって長さが増減する個所であれば良い。
【0027】
このように、撮影方向のエッジ信号の半値幅が大きくなるため、この現象を利用すれば、半値幅の増減に基づいて、ライン&スペースの凹凸判定可能になる。
【0028】
即ち、電子線の走査方向において、電子線の光軸に対して電子線を傾斜したときに得られるプロファイルの幅が大きくなったときは、そのプロファイルに相当する個所には電子線の傾斜方向に側面(エッジ)が形成されている部分が存在するものと判断することができる。言い換えれば、検出信号の線走査方向(二次元走査の場合、X方向)への広がりを計測し、光軸に沿って電子線を照射したときに比べて、前期広がりが大きくなったとき、電子線の傾斜方向側にエッジ面があると判断することができる。
【0029】
反対に、プロファイルの幅が小さくなったときには、電子線の傾斜方向から見て裏面
(反対側)に相当する部分と判断することができる。換言すれば、電子線を傾斜して走査したときに現れる2つのピーク幅の一方が大きくなり、他方が小さくなったときには、その間には凹部、或いは凸部が存在することが判る。またこの状態において、電子線が傾斜される側に、幅が増大するピークが存在する場合には凸部が存在し、電子線が傾斜される側に、幅が減少するピークが存在するときは凹部が存在すると判断することができる。
【0030】
以上の構成によれば、複雑な画像処理技術を採用しなくとも、試料上の凹凸判定が可能になる。また、ラインプロファイルを形成するという、画像処理に比較して簡単な方法で凹凸判定を行うことができるので、半導体検査装置の自動測定に組み込むことが容易であり、且つ検査工程のスループット向上にも効果がある。
【0031】
特にライン&スペースパターンのような同じようなパターンが連続するパターンの凹凸状態を判定することが容易になる。また、ライン&スペースを形成する組成に因らず、正確な凹凸判定を行うことができる。ラインパターンとスペースとの間に像質の違いがないような場合であっても正確に凹凸判定を行うことができる。
【0032】
〔実施例2〕
本実施例では凹凸判定の精度をより高める手法として、一方向からだけではなく、少なくとも±θの両方向からの走査を行う例について説明する。
【0033】
電子線によって、左右のエッジ信号の半値幅がもともと異なるパターンの場合等、一方向のみの傾斜走査では半値幅の増減を判断することが困難な場合があるが、±θ方向から撮影したプロファイルを比較すれば、半値幅の増減が左右のピークで逆になるため、判定が容易に行うことができる。
【0034】
図4は、±θ方向から撮影したプロファイルを使った凹凸判定方法の説明する図である。HM1(第1のピーク) がHP1(第3のピーク) 以上の幅を持つ場合において、HP2
(第4のピーク)がHM2(第2のピーク)以上の幅を持つと判断された場合には、そのパターンは凸パターンと判定するようにし、HM1がHP1より小さい場合において、
HP2がHM2より小さいと判断される場合には、そのパターンを凹パターンと判定するようにすれば、上述のように高精度なライン&スペースパターンの凹凸判定を行うことが可能になる。なお、本実施例ではHP1≦HM1であり且つHP2≧HM2のとき、及びHP1>HM1であり且つHP2<HM2のとき、2つのピーク間の凹凸推定を行う例について説明したが、これに限られることはなく、例えば「HP1<HM1,HP2>HM2⇒凸部」「HP1≧HM1,HP2≦HM2⇒凹部」と判定するようにしても良い。これは後述する実施例でも同じである。
【0035】
またパターンによってはプロファイルの左右のエッジ高さ((TM1またはTM2)と(TP1またはTP2))を用いて判定することが可能である。他に半値幅と高さを掛け合わせた値(HM1*TM1)や面積を用いることも可能である。
【0036】
〔実施例3〕
次に、ライン&スペースパターンが等間隔で且つ複数である場合に、より好適な凹凸判定法を、図13を用いて説明する。
【0037】
(1301)は走査電子顕微鏡画像のコントラストがエッジ効果でのみ得られるような画像で真上から電子線を走査した画像である。凹凸判定が必要なパターンはこのようなパターンであり、装置の制御誤差やパターン形状差異によって画像の中央に来るべき測定位置(特徴部)が例えばパターン断面図(1302)の測定位置(1312)のようにずれた場合、画像(1301)から測定位置(1312)を認識することは困難である。
【0038】
そこで前述の方法で電子線を鉛直方向±で傾斜して得られた2つのプロファイル(1303)から半値幅やピーク高さを用いて各エッジがラインパターンの左右どちらのエッジかを判定する。
【0039】
例えば7つエッジの左右判定結果が(1304)のようになったとする。ここで記号Rは右エッジを示し、記号Lは左エッジを示す。記号?は半値幅の差やピーク高さの差がなく判定できなかった場合を示す。また(1304)中の記号R*はパターン形状のばらつきやノイズによって誤ってエッジ判定した例である。
【0040】
次に認識するパターンはライン&スペースパターンであるという前提を用いて7つのエッジについて2つのテンプレート(1305)および(1307)を作成する。それぞれのテンプレートを左右エッジ判定結果(1304)と比較し、正解の多い方のテンプレート(ここでは(1305))を正しいとして選択する。即ちテンプレートで規定される条件(本実施例の場合、ラインとスペースの配置)の正解率が高いテンプレートによって、前記試料上の特徴部を特定する。このとき正しいとしたテンプレートを用いて判定できなかった記号?のエッジや判定を誤ったエッジを修正することができる。本方式によると複数エッジを用いて凹凸を判定するため凹凸判定の信頼性を向上することができる。
【0041】
なお、本実施例ではラインとスペースが交互に連続するライン&スペースパターンのテンプレートを用いる例について説明したが、これに限られることはなく、凹凸をなすパターンであれば、相応のテンプレートの作成によって、試料上の凹凸判定の確認を行うことが可能である。なお、本実施例ではテンプレートが2つの例について説明したが3つ以上であっても良い。
【0042】
〔実施例4〕
実施例3ではテンプレートを参照することで、判定不能なエッジの情報を推定する方法について説明したが、テンプレート1,2の適用に基づく判定結果の正解率がいずれも高いか、いずれも低い場合、走査電子顕微鏡の光学条件に問題があるか、或いはライン&スペースパターンそのものに問題がある可能性がある。実施例3で説明したテンプレートによる凹凸の正解率判定技術では、原理上いずれか一方の正解率が高く、他方の正解率が低いという傾向がでる筈である。即ち、いずれの正解率も高い場合、或いは低い場合には走査電子顕微鏡の光学条件やライン&スペースパターンそのものに問題がある可能性がある。
【0043】
このような場合、左右のエッジ判定結果に、ラインプロファイル,走査電子顕微鏡像,走査電子顕微鏡の光学条件、或いは半導体ウェハの製造履歴等の少なくとも1つを関連付けて記憶し、その後読み出せるようなシーケンスを組んでおけば、判定ミスの原因追及が容易になる。
【0044】
凹凸判定が上手くいかない場合、それ以上の測定が困難である場合が多いのでエラーメッセージを発生させて、操作者に注意を促すようにしても良い。更に半導体ウェハのように1枚のウェハに多数の測定点、或いは観察点があるような試料の場合には、エラーが発生した部分の測定や観察をスキップして、次の測定、或いは観察を行うようにしても良い。
【0045】
また半導体ウェハの場合、判定不能な個所が2点、或いは3点以上に及ぶ場合は、走査電子顕微鏡に何かしらの問題があるか、半導体ウェハ全体に問題が及んでいる可能性があるので、走査電子顕微鏡による測定或いは観察の中断、又はその半導体ウェハの測定、或いは観察の中断を行うようにしても良い。
【0046】
図15は、テンプレートによる凹凸判定の処理フローである。
【0047】
ステップ1501〜1504では、ライン&スペースパターンのエッジ方向に対し垂直な方向のラインプロファイルが形成できるように、電子線を走査する。本実施例では実施例2で説明した±θからの電子線走査による凹凸判定を行う。ステップ1505では、テンプレート1による正解率の算定を行う。ステップ1506では、テンプレート2による正解率算定を行う。
【0048】
この際、テンプレート1の正解率T1が所定値n1以上であり、テンプレート2の正解率T2が所定値n2より小さい場合(図15下表(2))、そのパターンはテンプレート1によって推定されるパターンであると判断される(ステップ1508)。また、テンプレート1の正解率T1が所定値n1より小さく、テンプレート2の正解率T2が所定値
n2以上の場合(図15下表(3))、そのパターンはテンプレート2によって推定されるパターンであると判断される(ステップ1509)。上記2つの条件に当てはまらない場合(図15下表(1)(4))は、測定不能と判断しエラー処理を行う(ステップ1509)。
【0049】
上記実施例では、一方のテンプレート(例えばテンプレート1)はそのパターンに相当するものであり、他方のテンプレート(例えばテンプレート2)はそのパターンとは異なる形状を規定している。即ち異なる形状、或いは条件(画像データ等)を規定したテンプレートによる情報(ラインプロファイルや画像データ等)の選別によって、判断の確度をより高めることができる。
【0050】
図15下表(1)(4)と判断された場合、上述したように原因追及のために左右のエッジ判定結果に、ラインプロファイル,走査電子顕微鏡像,走査電子顕微鏡の光学条件、或いは半導体ウェハの製造履歴等を関連付けて記憶し、その後読み出せるようなシーケンスを組んでおけば、パターン推定ができなかった原因を特定することが容易になり、その後の測定、或いは製造工程へのフィードバックを行うことが容易になる。
【0051】
特にラインパターンが連続して同じ方向に傾いて形成されているような場合、例えば半導体製造ライン中の光学式露光装置の装置条件に誤りがある場合が考えられる。よって、その旨を付帯情報として記憶しておけば、原因特定をより容易に行うことができる。パターンが特定方向に傾いている状態は、例えば一方の傾斜方向から電子線を照射したときだけ、電子線の傾斜方向のパターンエッジによって形成されるプロファイルの半値幅が太くなる現象に基づいて発見することができる。
【0052】
〔実施例5〕
図5は、得られた凹凸プロファイルを撮影した画像上に重ねて表示した例である。このように表示すれば、走査電子顕微鏡像上の凹凸判定が困難な試料像上でライン、或いはスペースの判定を容易に行うことができる。図6は、ライン&スペース画像の凹凸判定の処理フローである。601で各傾斜方向から撮影したプロジェクション波形を入力し、602で各ピークの半値幅を算出する。603で601から602までの処理を±θ方向のプロジェクション波形に対して行う。604では、±θ方向の対応したピークの半値幅変化を算出し、その変化から図4に示した判定方法で凹凸判定を行う。605では、凹凸をあらわしたプロファイルを出力する。
【0053】
〔実施例6〕
図7は、ライン&スペース画像で測長を行う場合にラインもしくは、スペースの位置特定に本発明を用いた場合の処理フローである。701で走査型電子顕微鏡(SEM)の計測条件を設定し、702でビーム照射角度もしくはステージ角度を+θ傾斜させる。703で撮影を行う。凹凸判定には、プロジェクション波形を用いるため、ここでの撮影は1フレーム画像全体を撮影しても良いし、数ライン分のデータを計測しても良い。704では、703で計測したデータを画像処理プロセッサに転送する。705で、702と同様な方法でビーム照射角度もしくはステージ角度を−θ傾斜させ、706で撮影を行い、707でデータを転送する。708では、705での傾斜を元に戻す。709では、704と
707で転送されたデータから画像処理プロセッサで凹凸判定を行う。
【0054】
最後に710でライン部であれば凸部分の座標、スペース部分であれば凹部分の座標を出力する。ここで、凹凸部分が複数検出された場合は、一番中央に近い座標を出力にしてもよい。
【0055】
以上のような構成によれば、パターンマッチング等の複雑な画像処理技術を用いることなく、簡単に視野合わせや測長,検査位置合わせを正確に行うことができる。
【0056】
〔実施例7〕
図8は、凸部を真上方向と+θ方向もしくは−θ方向から撮影した場合のプロファイル変化を表したものである。ここで、真上方向プロファイルの半値幅をHE1,HE2とし、+θ方向プロファイルの半値幅をHP1,HP2とし、−θ方向プロファイルの半値幅をHM1,HM2とする。
【0057】
図2で説明したように真上方向と+θ方向もしくは−θ方向の2方向から撮影した半値幅の変化を比較する事で1方向からでは難しい凹凸判定が可能になる。また本実施例の場合、1回の傾斜で凹凸判定を行うことができるので、±θに電子線を傾斜する場合と比較して、処理速度を向上することが可能になる。
【0058】
図9は、真上方向と正負方向のどちらか1方向から撮影したプロファイルを使った凹凸判定方法である。
【0059】
真上方向と正負方向のどちらか1方向から撮影したプロファイルを使った凹凸判定方法で測長を行う場合に、ラインもしくはスペースの位置特定に本発明を用いた場合の処理フローを図10および図11を用いて説明する。
【0060】
(1001)で走査型電子顕微鏡(SEM)の観察条件を設定し、(1002)で真上方向からビームを走査してプロファイルまたは画像を画像処理プロセッサ309にデータ0として転送する(1003)。このときパターン検出条件設定画面(1101)の設定項目Line&Space Detection(1102)の条件None(1103),One Side(1105),Double Side(1104)を参照する。ただし、この条件は予め設定されている。
【0061】
(1004)の凹凸判定実行でNone(1103)であれば凹凸判定を実行しないでデータ0を用いて位置検出(1013)を実行する。もしOne Side(1105),DoubleSide(1104)であれば、(1005)で傾斜設定1をした後、(1006)でビームを走査してプロファイルまたは画像を画像処理プロセッサ309にデータ1として転送する(1007)。
【0062】
(1008)でデータ0とデータ1を用いて凹凸判定を実行する。このときの判定方法は図9で述べた方式である。(1008)で凹凸判定可能ならここで求めた凹凸プロファイルを用いて位置検出(1013)を実行する。できなかった場合は傾斜設定1(1005)と反対の方向にビーム傾斜設定2する(1009)。ビーム傾斜後、同様にビームを走査してデータ2として画像処理プロセッサ309に転送する(1010)(1011)。
(1012)でデータ1とデータ2を用いて凹凸判定を実行し、判定可能なら凹凸プロファイルを用いて位置検出(1013)を実行する。
【0063】
できなければデータ0またはデータ1,データ2もしくは合成したデータを用いて位置検出する。位置検出後、測長値を算出する(1014)。以上のように処理することで測長値を算出するデータ0はビーム照射を最小限に押さえることができ、測長再現性の向上につながる。また、ライン幅とスペース幅がほぼ同じでラインとスペースの区別が付きにくいという判定は登録時にユーザが設定でき、凹凸判定のためのビーム照射によるパターンのダメージを押さえることができる。
【0064】
〔実施例8〕
次にビーム傾斜した画像を用いてパターン検出する方法を、図12を用いて説明する。(1201)で走査型電子顕微鏡(SEM)の観察条件を設定し、(1202)において真上方向でビームを走査して画像処理プロセッサ309に画像0を転送する(1203)。画像処理プロセッサ309はあらかじめ登録されているテンプレートを参照して正規化相関などのサーチアルゴリズムを用いてパターン検出を実行する(1204)。
【0065】
あらかじめ設定しておいたしきい値に基づいてパターン検出の成功を判定し成功なら終了する。失敗と判定された場合、登録時に設定しておいた方向または計算で求めた方向のビームを傾斜して(1205)、走査し画像1を得る(1206)。これを画像処理プロセッサ309に転送して(1207)、傾斜していない画像0と合成する。合成は画像0と画像1を足し合わせてもよいし、画像1のみを使用してもよい。
【0066】
合成画像を用いて(1204)と同様にパターン検出を実行する(1210)。本方式では、また(1202)から(1204)を実行せずに傾斜画像のみでパターン検出することもできる。以上のようにビームを傾斜してパターン検出をすることで得られる画像のエッジの情報量が増えて、少ないフレーム数でパターン検出が可能になり、スループットが改善される。またビーム照射量を減らすことができビーム照射によるダメージを軽減できる。
【0067】
登録時に計算で傾斜方向を決める場合は、テンプレート画像を上下左右方向や斜め方向も加えた4方向にそれぞれ微分して絶対値の総和を求め、最大となった方向とのなす角度が90度となる方向を選ぶ。これは特定の方向にエッジが偏っている場合に有効である。
【0068】
〔実施例9〕
電子線傾斜をパターン検出に用いる他の方法を、図14を用いて説明する。通常、位置決めなどでテンプレート画像を用いて画像認識を行う場合、あらかじめテンプレートを登録しておき検査時にそのテンプレートとマッチングを行う。
【0069】
テンプレート登録において真上から走査した画像(1402)上で入力手段312を用いてテンプレートとなる領域(1402)を選択する。この選択された部分画像を画像処理プロセッサ309に転送し、方向を求めるオペレータ(例えばSobelフィルタなど)を用いて方向画像を計算する。
【0070】
次に得られた方向画像の分布図を作成し、あらかじめ定めたしきい値以上の角度(複数でもよい)を求める。これらの角度はパターンエッジの分布を示すため、この方向に電子線を傾斜するとエッジ効果により情報量の多い画像が得られる。(1403)は電子線を鉛直方向から右に傾斜して得られた画像であり、パターン(1404)は右側のエッジが強調されている。即ちエッジが強調される個所を抽出することでパターン形状を特定することができる。
【0071】
同様の処理を上下左右方向や斜め方向も加えた複数方向について行うこともできる。また同様の処理を画像上下に突き抜けたラインパターンに適用すると左右の傾斜のみでよいことが判定できる。以上のようにして求めた傾斜画像を登録して検査時、テンプレートマッチングを行う。本方式によって低段差のパターンを信頼性よく認識することが可能となる。予め、パターンの形状が判明している場合では、エッジを強調できる方向(理想的にはエッジの長手方向に対し、垂直な方向)に選択的に傾斜を行うようにすれば、無駄な傾斜を行うことなく、パターンエッジを明確にすることができる。
【0072】
〔実施例10〕
これまでの実施例では、電子線を傾斜して走査した結果得られるラインプロファイルのピーク幅の増減に基づいて、試料上の凹凸を判定する技術について説明したが、本実施例においては、電子線の焦点位置を変えながら信号計測を行い、それぞれの画像でのラインとスペース領域の焦点評価値を比較することでラインとスペースから構成される画像の凹凸判定を行う例について説明する。
【0073】
図16は、本発明の画像処理装置の一実施例である走査電子顕微鏡装置の構成概要のブロック図である。この走査電子顕微鏡には自動焦点制御機能が組み込まれている。図16において、1601は試料台、1602は試料台上の撮影対象試料、1604は陰極、
1605は走査コイル、1606は電子レンズ、1608は走査コイル制御回路、1609はレンズ制御回路である。電子ビーム1614は、走査コイル1605によって試料1602上を走査され、試料1602から発せられた電子は検出器1603で検出される。検出器
1603からの信号S1がAD変換器1607に入力されてデジタル信号S2へと変換される。S2のデジタル信号は、画像処理プロセッサ1610に入力され、画像処理と特徴量の抽出が行われ、その結果は制御用計算機1611へ送られる。また、処理された画像は、表示装置1612へ送られ表示される。制御用計算機1611からの焦点制御信号
S3は、レンズ制御回路1609に入力されレンズ1606の励磁電流を調節することで焦点制御を行うことができる。1613は、制御用計算機1611に接続される入力手段である。
【0074】
以上の様に構成されている走査電子顕微鏡での自動焦点制御は、電子レンズの焦点条件を自動的に最適値に設定する制御であり、その方法は、電子レンズの条件を変化させながら、複数枚のフレーム走査を行い得られた2次電子や反射電子の検出信号から焦点評価値を算出,評価し、最適値を電子レンズの条件に設定するものである。
【0075】
半導体デバイス作成時、ウェハ上に描かれた微細なパターンの線幅を計測する場合に電子顕微鏡装置が使われる。ここで、ウェハ上の線幅を計測する部分がラインもしくはスペースの場合は、ラインとスペースの幅が同じようであると、その区別がつかなくなり、3次元的な情報から区別することが必要とされる。本発明は、簡便な手法でラインとスペース試料の凹凸情報を得ることができる荷電粒子線装置に関するものであるため、図16の走査電子顕微鏡装置に適応することが可能である。
【0076】
図17は、ラインとパターン試料の凹凸部分に焦点が合う場合をあらわすたものである。F1は、ライン部分(凸部分)に焦点があった場合であり、Fnは、スペース部分(凹部分)に焦点があった場合である。このように凹凸部分では焦点位置が異なるので、その情報を利用することで凹凸を判定する。
【0077】
図24は、電子レンズの励磁電流を変化させた場合の焦点評価値の変化を示した図である。ここで、焦点評価値には、画素間の微分値,2次微分値,ソーベル値,ラプラシアン値等が利用される。電子レンズの条件を変えながら撮影した画像毎に焦点評価値を算出すると電子レンズの焦点が合った条件で焦点評価値が最大値となる。図24では、電子レンズの励磁電流値がFiの時、フォーカス評価値が最大値となるため、Fiが焦点のあった条件である。
【0078】
図25にライン部分とスペース部分の励磁電流と焦点評価値の関係を示す。図24で説明したように焦点が合った条件で、焦点評価値が最大となるため、ライン部分(凸部分)に焦点が合った場合、ライン部分(凸部分)の焦点評価値は最大となるが、スペース部分(凹部分)の焦点は合っていないため、焦点評価値は小さくなる。反対のことがスペース部分(凹部分)に焦点が合った場合にも言える。
【0079】
図26に励磁電流と焦点距離の関係を示す。図26の様に励磁電流により焦点距離が決まるので、合焦点時の励磁電流がわかれば、その励磁電流の値から焦点距離が推測できることになる。つまり、異なる2つの領域に対し、それぞれの合焦点時の励磁電流がわかれば、その2つの領域の高低は判断できることになる。
【0080】
図18に焦点評価値を算出するまでの概略図を示す。焦点位置を変えるため励磁電流をF1〜Fnまで変化させ、それに対した画像G1〜Gnまでを取得する。次にG1〜Gnの画像に対して、それぞれ焦点評価用フィルタ(微分,2次微分,ソーベル,ラプラシアン等)を施し、焦点評価画像Gf1〜Gf2を作成し、焦点評価値FE1〜FEnを算出する。ここで、焦点評価値としては、焦点評価値画像の全画素値の合計,その平均値,分散値等を用いることができる。ここまでの工程は、通常、オートフォーカスとして実行され、FE1〜FEnの最大時の励磁電流値を合焦点時の励磁電流とする。
【0081】
図19にラインとスペース画像におけるプロジェクション波形を示す。電子顕微鏡画像では、エッジ効果により、ラインの端部分が高輝度に画像化される。したがって、そのプロジェクション波形は、図19の様にラインとスペースの境界でピークを示すため、ピークに挟まれた部分がラインもしくはスペースであることがわかる。
【0082】
図20にライン部分とスペース部分の焦点評価値の算出方法を示す。オートフォーカスでの合焦点画像から図19に示す様にプロジェクション波形を求め、焦点評価値を算出する領域(1)〜(5)までを決定する。焦点評価値画像Gf1〜Gfnのそれぞれの画像の(1)〜(5)の領域で焦点評価値FE11〜FEn5を算出する。次に(1)の領域に対して、FE11〜FEn1の最大値(FEi1)を求め、それに対応する励磁電流から(1)の領域の焦点合致の励磁電流値(Fi)を求める。同様に(2)〜(5)まで行い、それぞれの領域での焦点合致の励磁電流を求める。(1)〜(5)の焦点合致のフォーカス電流値の大小から、その領域の焦点距離を求め、領域の高低を判断し、凹凸を判定する。
【0083】
図23に本発明の一実施例である処理フローを示す。2301が図18で説明した焦点の異なる画像(Gi)と焦点評価画像(Gfi)を求める部分であり、この部分はオートフォーカスと同時に実行可能である。2302は、図19で説明した焦点評価値を算出し、焦点合致の励磁電流を求め、それに対応する画像からプロジェクション波形を求める部分である。2303は、図20で説明したピーク間領域(1)〜(5)の焦点評価値
(FEmn)を求める部分である。2304は、図21で説明したピーク間領域(1)〜(5)の焦点合致の励磁電流値を求める部分である。2305は、2304で求めた励磁電流値から(1)〜(5)の高低を判断し、凹凸を判定する部分である。
【0084】
図21は、ラインとスペース画像で測長を行う場合にラインもしくはスペースの位置特定に本発明を用いた場合の処理フローである。2101で走査型電子顕微鏡(SEM)の計測条件を設定し、2102でオートフォーカスを行い、2103で撮影を行う。2104では、図23に示す処理フローに従い、凹凸判定を行う。最後に2105でライン部であれば凸部分の座標、スペース部分であれば凹部分の座標を出力する。ここで、凹凸部分が複数検出された場合は、一番中央に近い座標を出力にしてもよい。
【0085】
図22は、得られた凹凸プロファイルを撮影した画像上に重ねて表示した例である。
【0086】
本実施例では、ライン&スペースの凹凸判定を、オートフォーカス時に取得する画像からラインとスペースに対応する部分の評点評価値を算出し、焦点合致時の励磁電流から焦点距離を求め、その値から画像の凹凸情報を得るため、マッチング処理等の複雑な画像処理を用いることなく簡便な方法で凹凸情報を得ることができる。また、得られた凹凸情報を位置決定に用いるため、ライン&スペース画像での測長ポイントの特定間違いを減少させることができる。また、オートフォーカスのタイミングで必要な情報を収集できるので、他のタイミングで、凹凸情報を得るための新たな工程を設ける必要がなく、スループット向上にも寄与できる。
【図面の簡単な説明】
【0087】
【図1】ラインプロファイルにおける傾斜計測時のエッジの変化を示す図。
【図2】凸部分を±θの方向から撮影した場合のプロファイル変化を示す図。
【図3】本発明の一実施例である走査電子顕微鏡の概略図。
【図4】±θ方向から撮影したプロファイルを使った凹凸判定方法を説明する図。
【図5】得られた凹凸プロファイルを撮影した画像上に重ねて表示した例を示す図。
【図6】ライン&スペース画像の凹凸判定の処理フロー。
【図7】ラインもしくはスペースの位置特定に本発明を用いた場合の処理フロー。
【図8】凸部を真上方向と+θ方向もしくは−θ方向から撮影した場合のプロファイル変化を示す図。
【図9】真上方向と正負方向のどちらか1方向から撮影したプロファイルを使った凹凸判定方法を示す図。
【図10】ラインもしくはスペースの位置特定に本発明を用いた場合の処理フロー。
【図11】パターン検出条件設定画面。
【図12】ビーム傾斜して得られた画像を用いてパターン検出する場合の処理フロー。
【図13】テンプレートを用いた凹凸判定法を説明する図。
【図14】複数方向のビーム傾斜によって、パターンのエッジを強調する例を説明する図。
【図15】テンプレートによる凹凸判定の処理フロー。
【図16】本発明の一実施例である走査電子顕微鏡装置の構成概略図。
【図17】ラインとパターン試料の凹凸部分に焦点が合う場合をあらわした図。
【図18】焦点評価値を算出するまでの概略図。
【図19】ラインとスペース画像におけるプロジェクション波形を示す図。
【図20】ライン部分とスペース部分の焦点評価値の算出方法を示す図。
【図21】ラインもしくはスペースの位置特定に本発明を用いた場合の処理法を示す図。
【図22】得られた凹凸プロファイルを撮影した画像上に重ねて表示した例を示す図。
【図23】本発明の一実施例である処理フローを示す図。
【図24】電子レンズの励磁電流を変化させた場合の焦点評価値の変化を示した図。
【図25】ライン部分とスペース部分の励磁電流と焦点評価値の関係を示す図。
【図26】励磁電流と焦点距離の関係を示す図。
【符号の説明】
【0088】
301…電子顕微鏡の鏡体部、302…電子銃、303…電子線、304…偏向器、
305…試料、306…電子検出器、307…増幅器、308…制御信号、309…画像処理プロセッサ、310…制御用計算機、311…表示装置、312…入力手段。
【特許請求の範囲】
【請求項1】
荷電粒子源と、観察試料を載せて移動するステージ系と、前記荷電粒子源より放出された荷電粒子線を試料上で走査する走査偏向系と、前記荷電粒子源より放出された荷電粒子線の焦点を変更する制御系と、前記試料の荷電粒子線の照射個所で得られる信号を検出する検出系を備えた荷電粒子線装置において、焦点位置を変えながら信号計測を行い、それぞれの画像の焦点評価値を算出し、それを比較する事でラインとスペースから構成される画像の凹凸判定を行う手段を備えることを特徴とする荷電粒子線装置。
【請求項2】
請求項1において、
焦点評価値の算出に、オートフォーカス時に取得した画像もしくは値を用いることを特徴とする荷電粒子線装置。
【請求項3】
請求項1において、
得られたラインとスペース画像の凹凸情報をプロファイル波形として撮影した画像上に重ねて表示する手段を備えたことを特徴とする荷電粒子線装置。
【請求項4】
請求項1において、
得られたラインとスペース画像の凹凸情報を位置の特定に用いることを特徴とする荷電粒子線装置。
【請求項1】
荷電粒子源と、観察試料を載せて移動するステージ系と、前記荷電粒子源より放出された荷電粒子線を試料上で走査する走査偏向系と、前記荷電粒子源より放出された荷電粒子線の焦点を変更する制御系と、前記試料の荷電粒子線の照射個所で得られる信号を検出する検出系を備えた荷電粒子線装置において、焦点位置を変えながら信号計測を行い、それぞれの画像の焦点評価値を算出し、それを比較する事でラインとスペースから構成される画像の凹凸判定を行う手段を備えることを特徴とする荷電粒子線装置。
【請求項2】
請求項1において、
焦点評価値の算出に、オートフォーカス時に取得した画像もしくは値を用いることを特徴とする荷電粒子線装置。
【請求項3】
請求項1において、
得られたラインとスペース画像の凹凸情報をプロファイル波形として撮影した画像上に重ねて表示する手段を備えたことを特徴とする荷電粒子線装置。
【請求項4】
請求項1において、
得られたラインとスペース画像の凹凸情報を位置の特定に用いることを特徴とする荷電粒子線装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2006−332069(P2006−332069A)
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願番号】特願2006−188799(P2006−188799)
【出願日】平成18年7月10日(2006.7.10)
【分割の表示】特願2002−166447(P2002−166447)の分割
【原出願日】平成14年6月7日(2002.6.7)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願日】平成18年7月10日(2006.7.10)
【分割の表示】特願2002−166447(P2002−166447)の分割
【原出願日】平成14年6月7日(2002.6.7)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]