
試料を作製するための方法およびシステム
【課題】全ミリングプロセス中に、試料を連続的にかつ実時間モードで観察することができ、かつプロセスの精度、品質、および停止の完全自動制御を行なうことができるシステムを提供する。
【解決手段】マスク50および試料21を操作し、それによって試料21の異なる側をイオンミリング装置40に露出することを含む。操作は、試料21とマスク50との間の空間的関係を変化させることなく維持しながら、回転させることを含む。マスク50および試料21のアラインメントの実行は、画像を走査型電子顕微鏡のような撮像装置によって得ることを含むことができる。
【解決手段】マスク50および試料21を操作し、それによって試料21の異なる側をイオンミリング装置40に露出することを含む。操作は、試料21とマスク50との間の空間的関係を変化させることなく維持しながら、回転させることを含む。マスク50および試料21のアラインメントの実行は、画像を走査型電子顕微鏡のような撮像装置によって得ることを含むことができる。
【発明の詳細な説明】
【技術分野】
【0001】
関連出願
本願は、2010年7月6日に出願された米国仮特許出願No.61/361536からの優先権の利益を主張する。この出願の内容は参考としてここに組み入れられる。
【0002】
発明の分野
本発明は、透過型電子顕微鏡法用の試料を作製するための方法およびシステムに関する。
【背景技術】
【0003】
発明の背景
透過型電子顕微鏡法(TEM)は、電子ビームを薄片試料に透過させて、それが検体を通過するときに検体と相互作用させる技術である。検体を透過した電子の相互作用から、高解像画像を形成することができる。薄片試料は数ナノメートルの厚さを有することができる。
【0004】
TEM試料の作製は、試料ホルダ要素に接続される試料を受け取るか製造することによって開始することができる。イオンミリング前の試料と試料ホルダ要素との組合せを初期試料と呼ぶ。
【0005】
試料ホルダ要素は数ミクロンよりずっと厚く、マニピュレータによって保持することができる。試料ホルダ要素は、試料に接着剤で接着するかまたは他の方法で接続することができる。試料の縁部領域または試料の縁部領域付近の領域は機械的工程によって薄化し、次いでイオンミリング装置によってさらに薄化して、電子にとって透明であることができかつTEM試料として使用することができる、非常に薄い領域を提供することができる。
【0006】
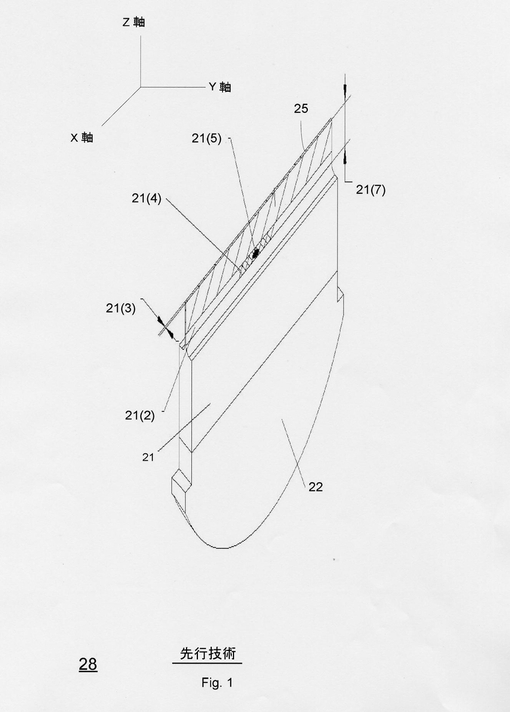
図1は、先行技術の初期試料21を示す。初期試料21は試料ホルダ要素29および試料28を含む。試料ホルダ要素29は半円形として形成される。試料ホルダ要素29の直線状縁部は、試料28の第1縁部に接続される。試料28の上部は薄化され、縁部25で終端する事前薄化領域21(2)を提供する。
【0007】
事前薄化領域21(2)は深さ(高さ)21(7)および幅21(3)を有する。事前薄化領域21(2)は、TEM試料に含めるべき標的21(5)を含む関心領域21(4)を含む。
【0008】
透過型電子顕微鏡法用の薄片試料を生成するための方法およびシステムを提供する必要性は高まっている。
【発明の概要】
【0009】
本発明の実施形態では、試料を作製するための方法を提供する。該方法は以下のステップを含むことができる。
a.マスクおよび初期試料をマニピュレータによって受け取るステップ。
b.マスクおよび初期試料の縁部領域の第1側が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置すること。
c.マスクで初期試料の縁部領域のマスキング部分を遮蔽しながら、初期試料の縁部領域の露出部分を非マスキング状態に維持するように、マスクおよび初期試料のアラインメントをマニピュレータによって実行するステップ。アラインメントの実行は、マスクおよび初期試料の画像を撮像装置によって得ることを含むことができる。
d.マスクと初期試料との間の空間的関係を変化させることなく、マスクおよび初期試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
e.マスキング部分をマスクによって遮蔽しながら、初期試料の縁部領域の露出部分をイオンミリング装置によってミリングして、部分的にミリングされた試料を提供するステップ。
f.マスクおよび初期試料の縁部領域の第2側が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置するステップ。第2側は第1側とは異なる。第1側および第2側は縁部領域の両側とすることができる。
g.マスクが部分的にミリングされた試料の縁部領域のマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分を非マスキング状態に維持するように、マスクおよび初期試料のアラインメントをマニピュレータによって実行するステップ。アラインメントの実行は、マスクおよび部分的にミリングされた試料の画像を撮像装置によって得ることを含むことができる。
h.マスクと部分的にミリングされた試料との間の空間的関係を変化させることなく、マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置に対面するように、マスクおよび部分的にミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
i.マスクによってマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングして、ミリングされた試料を提供するステップ。
【0010】
マスクおよび初期試料をイオンミリング装置の前に配置するステップは、マスクおよび初期試料をマニピュレータによって回転させることを含むことができる。
【0011】
部分的にミリングされた試料の縁部領域の露出部分をミリングするステップは、ミリング中に、撮像装置の透過型検出器によってミリングされた試料の縁部領域の厚さを監視することを含むことができる。
【0012】
該方法は、部分的にミリングされた試料の縁部領域のミリング中に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させることを含むことができる。かくして、以前にマスキングされた領域を除去し、それによって縁部領域を要求される厚さまで薄化するために、マスク領域の以前にマスキングされた領域を露出させるようにマスクを移動させることができる。
【0013】
該方法は、部分的にミリングされた試料のミリング後に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させることを含むことができる。かくして、以前にマスキングされた領域を除去し、それによって縁部領域を要求される厚さまで薄化するために、マスク領域の以前にマスキングされた領域を露出させるようにマスクを移動させることができる。
【0014】
撮像装置の光軸はミリング工具の光軸に対し直角を成すことができる。マニピュレータは、マスクおよび初期試料がイオンミリング装置に対面するように、それらを90度回転させることができる。
【0015】
該方法は以下のステップを含むことができる。
a.マスクおよび初期試料の縁部領域の第1側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによって配置するステップ。
b.マスクおよび初期試料の縁部領域の第1側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
c.マスクおよび初期試料の縁部領域の第2側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置するステップ。
d.マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび部分的にミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
【0016】
初期試料の縁部領域は少なくとも1ミクロンの厚さを有し、ミリングされた試料の縁部領域の厚さは50ナノメートルを超えない。
【0017】
ミリングするステップは、イオンミリング装置の光軸を中心にミリングビームを回転させながら試料をミリングすることを含むことができる。
【0018】
該方法は、部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によって除去することを含むことができる。
【0019】
該方法は、部分的にミリングされた試料の縁部領域の厚さに基づいて、部分的にミリングされた試料の縁部領域のミリングを停止することを含むことができる。
【0020】
該方法は、撮像装置の透過型検出器によって部分的にミリングされた試料の縁部領域の厚さを監視することを含むことができる。
【0021】
該方法は、撮像装置の透過型検出器によって出力される電流を、電流値と厚さの値との間の予め定められた関係と比較することを含むことができる。
【0022】
該方法は以下のステップを含むことができる。
a.マスクおよびミリングされた試料の縁部領域の第1側が撮像装置に対面するように、マスクおよびミリングされた試料をマニピュレータによって撮像装置の前に配置するステップ。
b.ミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクがミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよびミリングされた試料のアラインメントをマニピュレータによって実行するステップ。アラインメントの実行は、撮像装置によってマスクおよびミリングされた試料の画像を得ることを含むことができる。
c.マスクとミリングされた試料との間の空間的関係を変化させることなく、マスクおよびミリングされた試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよびミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
d.マスキング部分をマスクによって遮蔽しながら、ミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングして、さらにミリングされた試料を提供するステップ。
【0023】
画像を得るステップは、撮像装置、すなわち光学装置、走査型電子顕微鏡、または光学装置と走査型電子顕微鏡との組合せによって、実行することができる。
【0024】
該方法は、後方散乱電子検出器によって初期試料のミリングの進捗を監視するステップと、部分的にミリングされた試料のミリングの完了を透過型検出器によって監視するステップとを含むことができる。
【0025】
該方法は、部分的にミリングされた試料の縁部領域が所望の厚さに達したときに、部分的にミリングされた試料のミリングを自動的に停止することを含むことができる。
【0026】
本発明の実施形態では、試料作製システムを提供し、それはマニピュレータ、撮像装置、およびイオンミリング装置を含むことができる。
a.マニピュレータは、次のように構成されることができる。
1.マスクおよび初期試料を受け取る。
2.マスクおよび初期試料の縁部領域の第1側が撮像装置に対面するように、マスクおよび初期試料を撮像装置の前に配置する。
3.初期試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクが初期試料の縁部領域のマスキング部分を遮蔽するように、マスクおよび初期試料のアラインメントに関与する。マニピュレータは、マスクおよび初期試料を要求される位置に配置するときに、アラインメントプロセスに関与する。アラインメントプロセスはさらにマスクおよび初期試料の画像の取得、画像の処理、ならびにコマンドの(オペレータから、コントローラから、手動的または自動的な)マニピュレータへの提供を必要とするかもしれない。
4.マスクと初期試料との間の空間的関係を変化させることなく、マスクおよび初期試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよび初期試料をイオンミリング装置の前に配置する。
b.イオンミリング装置は、マスキング部分をマスクによって遮蔽しながら、初期試料の縁部領域の露出部分をミリングして、部分的にミリングされた試料を提供するように構成することができる。
c.マニピュレータはさらに、次のように構成される。
1.マスクおよび初期試料の縁部領域の第2側が撮像装置と対面するようにマスクおよび初期試料を撮像装置の前に配置する。ここで第2側は第1側とは異なる。
2.部分的にミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクが部分的にミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよび部分的にミリングされた試料のアラインメントに関与する。マニピュレータは、マスクおよび部分的にミリングされた試料を要求される位置に配置するときに、アラインメントプロセスに関与する。アラインメントプロセスはさらにマスクおよび部分的にミリングされた試料の画像の取得、画像の処理、ならびにコマンドの(オペレータから、コントローラから、手動的または自動的な)マニピュレータへの提供を必要とするかもしれない。
3.マスクと部分的にミリングされた試料との間の空間的関係を変化させることなく、マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置に対面するように、マスクおよび部分的にミリングされた試料をイオンミリング装置の前に配置する。
d.イオンミリング装置はさらに、マスクによってマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分をミリングして、ミリングされた試料を提供するように適応されることができる。
e.撮像装置は次のように構成されることができる。
1.マスクおよび初期試料のアラインメント中に、マスクおよび初期試料の画像を得る。
2.マスクおよび部分的にミリングされた試料のアラインメント中に、マスクおよび部分的にミリングされた試料の画像を得る。
【0027】
撮像装置は、光学装置、走査型電子顕微鏡、またはそれらの組合せとすることができる。
【0028】
システムマニピュレータは、マスクおよび初期試料がイオンミリング装置と対面するまで、マスクおよび初期試料を回転させるように構成されることができる。
【0029】
撮像システムは、部分的にミリングされた試料の縁部領域の露出部分のミリング中に、部分的にミリングされた試料の縁部領域の露出部分の厚さを示す検出信号を提供するように構成された透過型検出器を含むことができる。
【0030】
マニピュレータは、部分的にミリングされた試料の縁部領域のミリング中に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させるように構成されることができる。
【0031】
システムは、部分的にミリングされた試料のミリング後に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させるように構成されることができる。
【0032】
撮像装置の光軸はミリング工具の光軸に対し直角を成すことができ、マニピュレータは、マスクおよび初期試料がイオンミリング装置に対面するまで、マスクおよび初期試料を回転させるように構成されることができる。
【0033】
マニピュレータは次のように構成されることができる。
a.マスクおよび初期試料の縁部領域の第1側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料を配置する。
b.マスクおよび初期試料の縁部領域の第1側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび初期試料をイオンミリング装置の前に配置する。
c.マスクおよび初期試料の縁部領域の第2側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料を撮像装置の前に配置する。
d.マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび部分的にミリングされた試料をイオンミリング装置の前に配置する。
【0034】
初期試料の縁部領域は、少なくとも1ミクロンの厚さを有し、システムは、ミリングされた試料の縁部領域が50ナノメートルを超えない厚さになるまで、ミリングされた試料の縁部領域をミリングするように構成されることができる。
【0035】
イオンミリング装置は、イオンミリング装置の光軸を中心にミリングビームを回転させながら、ミリングを行なうように構成されることができる。
【0036】
イオンミリング装置は、部分的にミリングされた試料の縁部領域の露出部分を除去するように構成されることができる。
【0037】
システムは、部分的にミリングされた試料の縁部領域の厚さに基づいて、部分的にミリングされた試料の縁部領域のミリングを停止するように構成されることのできるコントローラを含むことができる。
【0038】
システムは、部分的にミリングされた試料の縁部領域の厚さの監視を支援するように構成することのできる透過型検出器を含むことができる。透過型検出器は、試料の縁部領域の厚さを示す検出信号を提供することによって、監視を支援する。検出信号は既知の厚さを表わし、したがって縁部領域の実際の厚さを検出するように処理することができる。
【0039】
システムは、撮像装置の透過型検出器によって出力された電流を、電流値と厚さの値との間の予め定められた関係と比較するように構成されることのできるコントローラを含むことができる。
【0040】
システムは、初期試料のミリングの進捗の監視に関与するように構成された後方散乱電子検出器と、部分的にミリングされた試料のミリングの完了の監視を支援するように構成されることのできる透過型検出器とを含むことができる。
【0041】
システムは、部分的にミリングされた試料の縁部領域の所望の厚さに達したときに、部分的にミリングされた試料のミリングを自動的に停止するように構成されることのできるコントローラを含むことができる。
【0042】
イオンミリング装置はさらに、マスキング部分がマスクによって遮蔽されている間に、ミリングされた試料の縁部領域の露出部分をミリングして、さらにミリングされた試料を構成されることができる。
【0043】
マニピュレータはさらに次のように構成されることができる。
a.マスクおよびミリングされた試料の縁部領域の第1側が撮像装置に対面するように、マスクおよびミリングされた試料を撮像装置の前に配置する。
b.ミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクがミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよびミリングされた試料のアラインメントに関与する。
c.マスクとミリングされた試料との間の空間的関係を変化させることなく、マスクおよびミリングされた試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよびミリングされた試料をイオンミリング装置の前に配置する。
【図面の簡単な説明】
【0044】
本発明のさらなる詳細、態様、および実施形態を単なる例として図面に関連して説明する。図面では、類似の要素または機能的に同様の要素を識別するために同様の参照番号を使用する。図中の要素は、簡潔および明確を期すように示されており、必ずしも一定の縮尺で描かれてはいない。
【0045】
【図1】図1は、先行技術の初期試料を示す。
【0046】
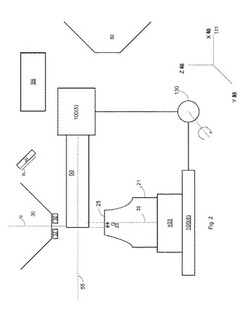
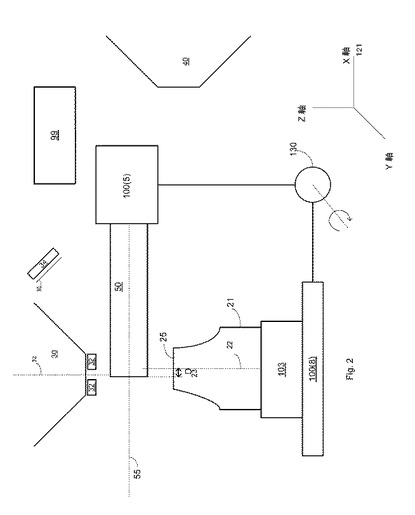
【図2】図2は、本発明の実施形態に係るアラインメントステージ中のシステムの一部分を示す。
【0047】
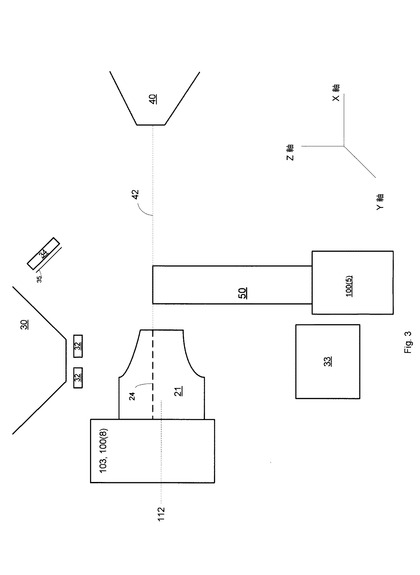
【図3】図3は、本発明の実施形態に係る1回目のミリングシーケンス中のシステムの一部分を示す。
【0048】
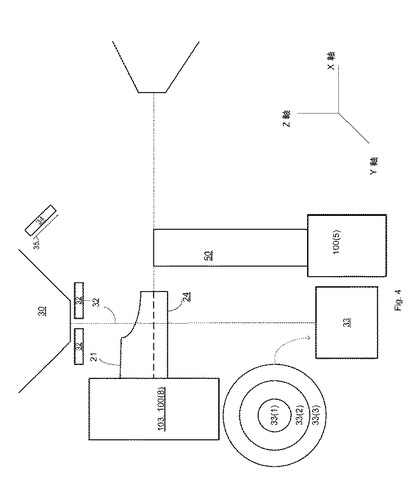
【図4】図4は、本発明の実施形態に係る2回目のミリングシーケンス中のシステムの一部分を示す。
【0049】
【図5】図5は、本発明の実施形態に係るミリングされた試料を示す。
【0050】
【図6】図6は、本発明の実施形態に係るマニピュレータを示す。
【0051】
【図7】図7は、本発明の実施形態に係る試料ホルダ、初期試料、およびマニピュレータの一部分を示す。
【0052】
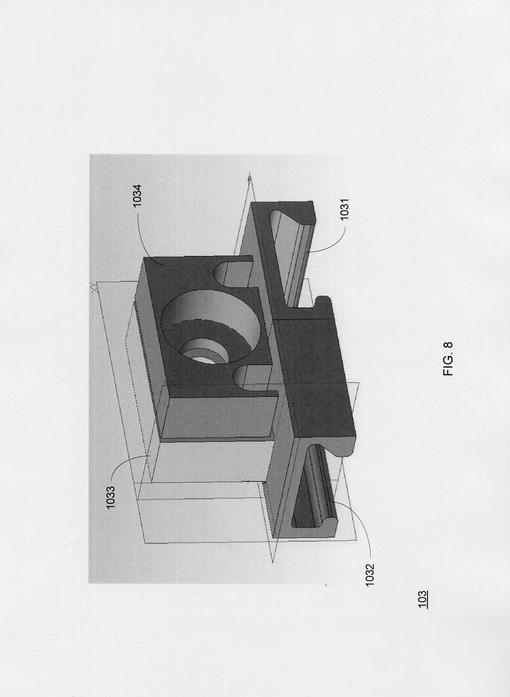
【図8】図8は、本発明の実施形態に係る試料ホルダを示す。
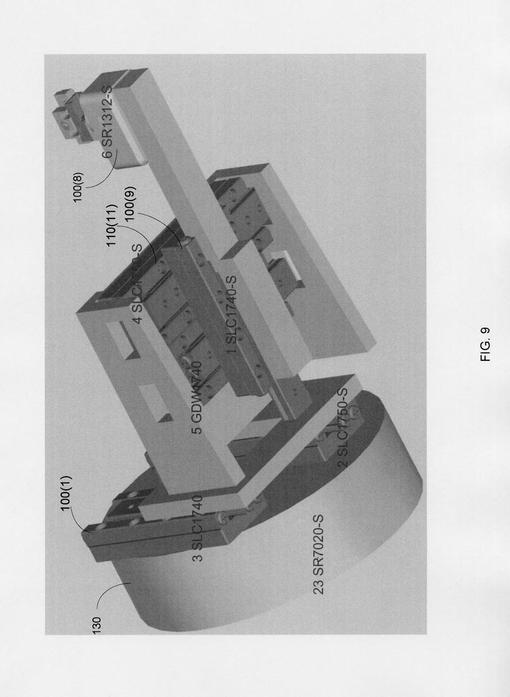
【図9】図9は、本発明の実施形態に係る試料ホルダを示す。
【0053】
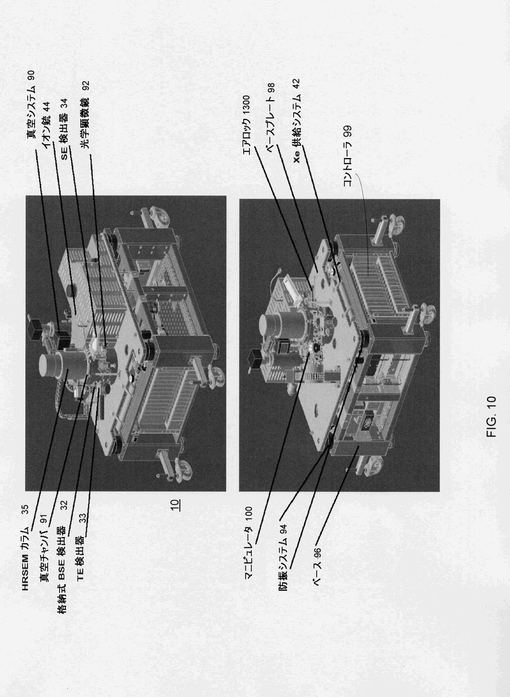
【図10】図10は、本発明の実施形態に係るシステムを示す。
【0054】
【図11A】図11Aは、本発明の実施形態に係るシステムの一部分を示す。
【図11B】図11Bは、本発明の別の実施形態に係るシステムの一部分を示す。
【図11C】図11Cは、本発明のさらに別の実施形態に係るシステムの一部分を示す。
【図11D】図11Dは、本発明のさらに別の実施形態に係るシステムの一部分を示す。
【0055】
【図12】図12は、本発明の実施形態に係るイオンミリング装置を示す。
【0056】
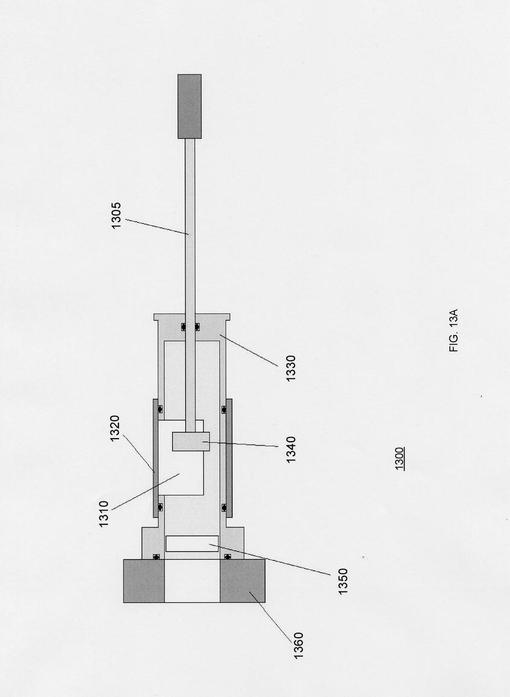
【図13A】図13Aは、本発明の実施形態に係るエアロック組立体を示す。
【図13B】図13Bは、本発明の別の実施形態に係るエアロック組立体を示す。
【図13C】図13Cは、本発明のさらに別の実施形態に係るエアロック組立体を示す。
【図13D】図13Dは、本発明のさらに別の実施形態に係るエアロック組立体を示す。
【0057】
【図14】図14は、本発明の実施形態に係る方法を示す。
【0058】
【図15】図15は、本発明の実施形態に係る方法を示す。
【発明を実施するための形態】
【0059】
本発明の上述および他の目的、特徴、および利点は、以下の詳細な説明を添付の図面と照らし合わせて読んだときに、いっそう明瞭になるであろう。図面では、同様の参照符号は様々な図全体で同様の要素を表わす。
【0060】
本発明の図示した実施形態は大部分が、当業者に公知の電子部品および回路を用いて実現することができるので、本発明の基礎を成す概念を理解し評価するために、かつ本発明の教示を曖昧にあるいは分かりにくくしないためにも、必要と思われる程度以上には詳述しない。
【0061】
縁部領域という用語は、その通常の意味を有する。それは縁部に近接する領域であると解釈することができ、あるいは縁部によって範囲を定めることができる。試料の縁部領域は試料の縁部に近接するか、または縁部によって範囲を定めることができる。それは標的を含むことができる。試料の縁部領域は、TEM試料を形成するようにイオンミリングによって薄化することができる。縁部領域のミリング後の厚さは51ナノメートル未満とすることができる。その幅および長さは、1ミクロン以上とすることができるが、他の寸法を提供することができる。縁部領域は、矩形の形状を有するものとして図示されているが、これは必ずしもそうする必要はなく、他の形状を持つことができる。
【0062】
本発明の実施形態では、方法を提供する。該方法は、以下を含むことができる。
a.マスクを生成または受け取るステップ。マスクは高精度マスクをもたらすためにマイクロクリービング(micro−cleaving)プロセスによって製造することができる。
b.数ミクロンの厚さ(その縁部付近)を有する初期試料を受け取るか生成する。図1に示す実施例を参照すると、初期試料の厚さは、事前薄化領域21(2)の厚さである。
c.マスクおよび初期試料をマニピュレータに提供する。図1に示す実施例を参照すると、マニピュレータは試料ホルダ要素29を保持する。
d.マニピュレータを使用することによってマスクおよび初期試料のアラインメントを行ない、かつ走査型電子顕微鏡、光学顕微鏡、またはそれらの組合せによってアラインメントプロセスを観察する。アラインメントプロセスは、マスクおよび初期試料の1つ以上を1つ以上の軸に沿って、所望の空間関係が達成されるまで移動させることを含むことができる。例えば、アラインメントはマスクおよび初期試料をそれらが互いに平行になり、かつマスクが取り除くべき初期試料の部分だけを暴露させるまで位置させることを含むことができる。図1の初期試料を参照すると、マスクは、マスクの縁部領域が(X軸に沿って)縁部25と平行になり、かつ事前薄化領域の半分以上だけをマスキングするように配置することができる。事前薄化領域の正確な半分からのわずかな逸脱は、TEM試料の期待される幅の約半分である。TEM試料は、事前薄化領域と同一の厚さを有することができる。代替的に、図1のマスキング要素は、ミリングを実行する前に少なくとも部分的に除去することができる。
e.マスクおよび初期試料がイオンミリング装置に対面するようにアラインメントを維持しながら、軸を中心にマスクおよび初期試料を回転させる。マスクおよび初期試料は、それらがイオンミリング装置の視野内に位置するという意味で、イオンミリング装置に対面する。それらはイオンミリング装置の光軸に対し直角を成すことができるが、光軸から90度とは異なる角度に向けてもよい。イオンミリング装置がミリングプロセス中に照射角度を変更した場合、イオンミリング装置の光軸は、異なるミリング角度の関数として画定することができる。例えば、光軸は異なるミリング角度の平均とすることができる。
f.初期試料の縁部領域の露出部分をイオンミリング装置によってミリングすることを含む1回目のミリングシーケンスを実行する。イオンミリング装置は、走査型電子顕微鏡によってミリングを観察しながら、二重偏向技術によってミリングすることができる。
g.部分的にミリングされた試料の縁部領域の他の側をイオンミリング装置に露出させるために、マスクと部分的にミリングされた試料との間の空間的関係を(マニピュレータによって)変化させる。
h.マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび部分的にミリングされた試料のアラインメントを実行する。部分的にミリングされた試料の他の側をイオンミリングに露出させるようにマスクはアラインメントされ、アラインメントは、マスクおよび/または初期試料をマニピュレータによって移動させることを含むことができる。
i.ミリングを走査型電子顕微鏡によって観察しながら、部分的にミリングされた試料の縁部領域の他の(現在露出されている)部分を、所望の厚さに達するまでイオンミリング装置によってミリングすることを含む2回目のミリングシーケンスを実行する。
【0063】
システムは、全ミリングプロセス中に、試料を連続的にかつ実時間モードで観察することができ、かつプロセスの精度、品質、および停止の完全自動制御を行なうことができる。
【0064】
図2〜4および図10を参照すると、システム10は以下を含むことができる。
a.マニピュレータ100。マニピュレータ100は、種々のステージにおける複数の操作要素を含むことができる。
b.走査型電子顕微鏡(SEM)のような撮像装置。SEMは例えば対物レンズ30、BSE検出器32、SE検出器34、TEM検出器33のみならず、SEMカラム35に含むことのできる電子源、電子光学系、および他の構成要素をも含むことができる。
c.イオンミリング装置40。
d.システムの様々な構成要素を制御するコントローラ(図10に99で表わす)。
【0065】
システム10はまた、真空システム90、真空チャンバ91、光学顕微鏡92、防振システム94、ベース96、エアロック1300、およびベースプレート98をも含むことができる。イオン・ビーム・ユニット40は、Xe供給ユニット42およびイオン銃44のような種々の構成要素(一部は図10および12に示されている)を含むことができる。
【0066】
システム10は、マスク50を生成するか受け取ることができる。マスクは、高精度マスクを提供するためにマイクロクリービングによって製造することができる。システムがマスク50を生成する場合、それはマイクロクリービングユニット(図示せず)を含む。
【0067】
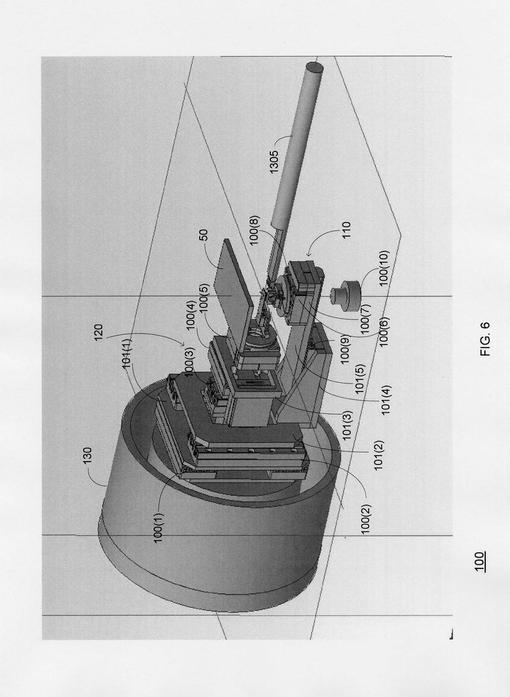
図6は、マニピュレータ100およびエアロック1300の供給ロッド1305の一部を示す。
【0068】
マニピュレータ100は、どちらも主回転ステージ130上に位置する2つの個別サブユニット110および120を含む。
【0069】
第2サブユニット120は試料およびマスクを操作し、X、Y、Z、およびθステージを有する。図6では、これらのステージはXステージ100(1)、Yステージ100(2)、Zステージ100(3)、およびθステージ100(5)と表わされる。
【0070】
第1サブユニット110は試料を操作することができ、それは、例えば第2サブユニット120によって導入された移動に対してマスクを移動させることによって、マスクと試料との間の空間的関係を変更することができる。マスクおよび試料は各々、サブユニットによって移動させることができ、各々を互いに対して移動させることができ、回転ステージ130のようなステージを共用することができないことが注目される。
【0071】
第1サブユニット110はX、Y、Z、およびθステージを有することができる。図6および9のいずれにおいても、これらのステージはXステージ100(11)、Yステージ(図示せず)、Zステージ100(9)、およびθステージ100(8)と表わされる。
【0072】
第2サブユニット120はマスクを操作することができ、またマスク、較正プレート、アパーチャ、成膜用ターゲット等のような技術的アクセサリをも操作することができる。
【0073】
第1サブユニット110は、試料ホルダ(シャトル103とも呼ばれる)から試料または技術的アクセサリを受け取ることができる。シャトル103は、それが試料用のアンギュラステージ100(8)上に配置されるまで移動することができる。
【0074】
ステージは、101(1)〜101(5)と表わされるプレート、ビーム、レール、ガイドライン等のような構造要素間で接続される。
【0075】
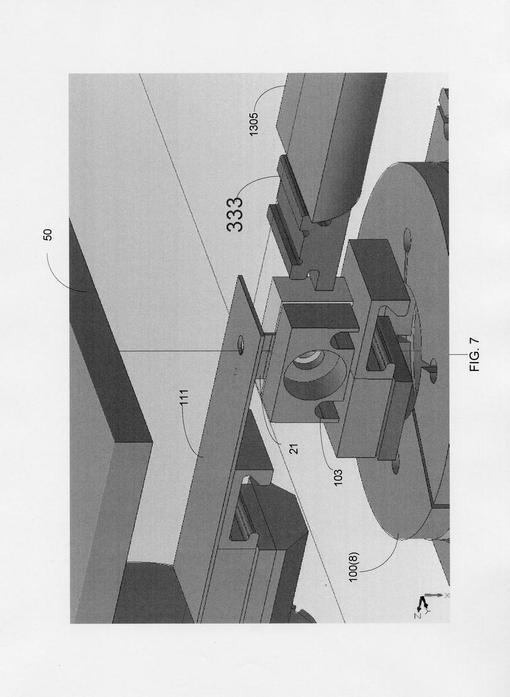
図7は、マスク50によってマスキングされ、シャトル103によって保持された初期試料21をより詳細に示す。図7はまた、初期試料21の上に位置する固定アパーチャマスク111をも示す。イオンビームは固定アパーチャマスク111のアパーチャを通過するはずである。固定アパーチャマスク111は、イオンミリングの結果生じる副次的損傷を防止する。それは初期試料21に対して固定される。図7はまた、初期試料21がロックロードから(またはロックロードに)もたらされるときに、初期試料21を支持することのできる要素333をも示す。図7は、初期試料21がシャトル103に受け取られその上に配置された後の要素333を示す。
【0076】
図8は、2つの相互垂直蟻継ぎ1031および1032を含むシャトル103を示す。シャトル103はまた、間隔を置いて配置されそれらの間の狭い空間に試料21を保持する2つのブロック1033および1034をも含む。図9は、マニピュレータエンジン131のみならず種々の構成要素をも示す。
【0077】
図2を参照すると、初期試料21とマスク50との間のアラインメントプロセスを監視するために、検出器32および/または検出器34を使用する走査型電子顕微鏡が用いられる。
【0078】
アラインメントプロセスは、(a)マスク50および初期試料21が互いに平行になる(両方とも水平とすることができる)かまたは任意の他の仕方で配置され、かつ(b)マスク50の縁部領域が、1回目のミリングシーケンス中にミリングされた後の初期試料21の所望のミリング後の縁部を表わす想像線の真上に位置されるように、マスク50および初期試料21のアラインメントを実行することを含むことができる。この想像線は、ミリングされる試料21の中心から数ナノメートルの位置に配置されることができる。破線55は、マスク50がアラインメントプロセスの終端に対して水平であることを示している。初期試料21の縁部25上のマスク50の縁部53の軌跡と初期試料21の中心22との間の距離(D23)は数ナノメートルである。それはミリング後の試料の最終厚さの約2分の1である。
【0079】
アラインメントプロセスの目的は、マスクがイオンミリング装置と初期試料21との間に配置された後、初期試料の予め定められた露出部分をイオンミリング装置にミリングさせる一方、初期試料の予め定められたマスキング部分をイオンミリング装置がミリングすることをそれ(マスク)が防止することを保証することである。
【0080】
ひとたびアラインメントプロセスが終了すると、マスク50および初期試料21は移動する(例えば回転する)。回転は、マスク50と初期試料21との間の空間的関係を変えずに維持しながら、主回転ステージ130によって、軸を中心に(例えばX軸を中心に)実行することができる。ひとたびマスク50および初期試料21がイオンミリング装置40に対面すると、移動(回転)は停止することができる。
【0081】
イオンミリング装置40は、(検出器32および/または検出器34を使用して)走査型電子顕微鏡によってミリングを観察しながら、初期試料21の縁部領域の露出部分を二重偏向によってミリングすることを含む1回目のミリングシーケンスを実行する。ミリングはさらに、初期試料21の片側の事前薄化領域をさらに薄化して、部分的にミリングされた試料(図4に21´で表わされる)のミリング済みの側を(図4に24で表わされる)を提供する。イオンビーム42はXY面内で偏向することができるが、これは必ずしもそうでなくてもよい。
【0082】
初期試料の片側がミリングされ(部分的にミリングされた試料21´が提供された)後、マニピュレータ100は、部分的にミリングされた試料21´の縁部領域の反対側をイオンミリング装置40に露出させるために、マスク50と部分的にミリングされた試料21´との間の空間的関係を変化させる。これは、試料回転ステージ100(8)上でその軸(112)を中心に部分的にミリングされた試料21´を回転させることを含むことができ、かつマスク50の高さを変更することをも含むことができる。
【0083】
本発明の実施形態では、所望のアラインメントが得られることを保証するために撮像システムがマスクおよび部分的にミリングされた試料の画像を取得するアラインメントプロセス中、空間的関係の変化は制御される。アラインメントに先立ち、アラインメントを実行する撮像システムに対面するまでマスクおよび部分的にミリングされた試料を移動(例えば回転)させ、次いでイオンミリング装置に対面するまでマスクおよび部分的にミリングされた試料を移動(例えば回転)させることができる。
【0084】
空間的関係を変化させた後、イオンミリング装置40は、走査型電子顕微鏡および(任意選択的に、部分的にミリングされた試料が電子を部分的に透過し始めたときに)TEMまたはSTEM検出器33によってミリングを観察しながら、部分的にミリングされた試料21´の縁部領域の他の(今露出されている)部分を所望の厚さに達するまでミリングすることを含む、2回目のミリングシーケンスを実行する。ミリングプロセスは、ミリングされた試料の厚さが所望の厚さに達したことがTEM検出器33により示されたときに、自動的に停止することができる。
【0085】
システム10は、格納式BSE検出器、SE検出器、またはそれらの組合せを含むことができる。スパッタ率の高い初期イオンミリング中に、試料の観察は、図2に対物レンズ30の磁極片の下に位置するように示された格納式BSE検出器32によって達成することができる。
【0086】
試料がまだ入射一次電子を透過しないイオンミリングの中間ステージで高解像度画像を得るために、SE検出器34およびBSE検出器32の組合せを使用することができる。
【0087】
試料が一次電子を透過する、イオンミリングの最終ステージで高解像度画像を得るために、透過型(TE)検出が使用される。試料アラインメントプロセスの標的識別をオペレータが、3つの上記検出器、すなわちSE、BSE、およびTEの組合せによって実行することができる。
【0088】
ミリングされた試料21″の最終厚さは、透過型(TE)検出器33からの出力電流の測定によって決定することができる。これらの出力電流対試料厚さの較正曲線が、試料の様々な材料成分について予め定められた分析条件に対し計算される。そのような曲線の例を図11に示す。これらの曲線は、これらの曲線は検出器の追加出力であり、データは〜ミリングプロセスを自動的に停止させる。完成したTEM試料と共に厚さマップが提供される。
【0089】
SE検出器34は、シンチレータおよび光電子増倍管の組合せを含むEverhart−Thornley型検出器とすることができる。SE検出器34は、システムチャンバの側壁に取り付けることができる。SE検出器34は、電流モードで動作することができる。イオンミリング中に、SE検出器34は保護シャッタ35によって保護される。図2はSE検出器34を、対物レンズ30の右側に位置するように示されているが、これは必ずしもそうでなくてもよい。
【0090】
BSE検出器32は、極端に短い作業距離が必要なときに高解像度観察モードを得るために、その格納を可能にするように対物レンズ30の磁極片の下に配置することのできる、固体半導体検出器とすることができる。BSE検出器32は電流モードで動作することができる。BSE32検出器は、イオンミリング中に試料表面の観察のために使用することができる。
【0091】
TE検出器33は、電気的に互いに絶縁された3つの独立部品を含むことができる。第1明視野TE33(1)検出器と呼ばれる第1の部品は、試料の下の顕微鏡主軸上に配置されるディスクとすることができる。それは、小さい角度で散乱する透過電子の検出専用である。第2の部品は、第2明視野TE検出器33(2)と呼ばれ、第1明視野TE検出器と同軸のリングを表わす。それは、小さい角度であるが第1明視野TE検出器の場合よりは大きい角度で散乱する透過電子の検出専用である。暗視野TE検出器33(3)と呼ばれる第3の部品は、第2明視野TE検出器と同軸のリングを表わす。それは、比較的大きい角度で散乱する透過電子の検出専用である。これら3つのTE検出器部品は全て固体半導体検出器とすることができ、約1に等しい原子数分解能を有することができ、電流モードで働くことができる。イオンミリング中に、TE検出器33は、試料21の下の顕微鏡主軸上のその頂部に配置された保護シャッタのファラデーカップによって保護することができる。それは、処理済み試料の厚さ測定用のTE検出器のその後の較正を達成するために、電子プローブ電流の測定専用とすることができる。
【0092】
検出器の数、それらの位置、検出器の種類、および各検出器の部品数(ならびにそれらの大きさおよび形状)は、上に示した実施例とは異なることができることが注目される。
【0093】
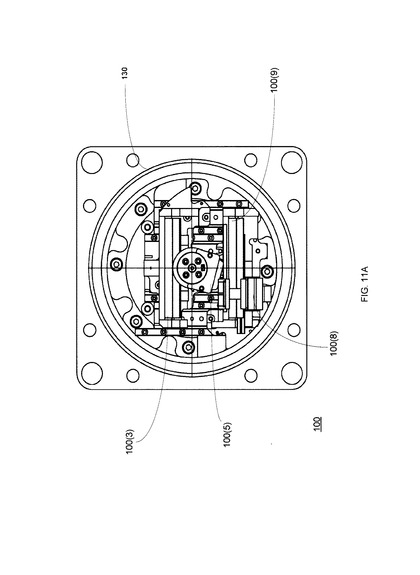
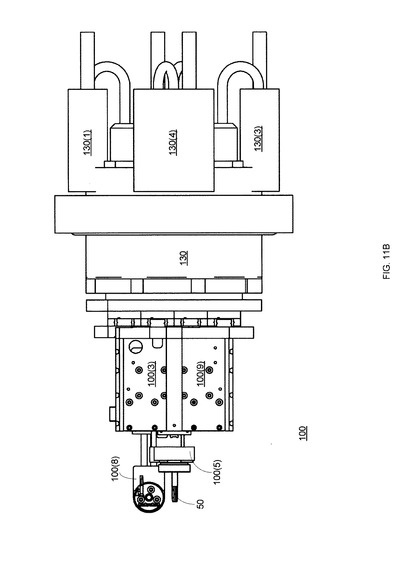
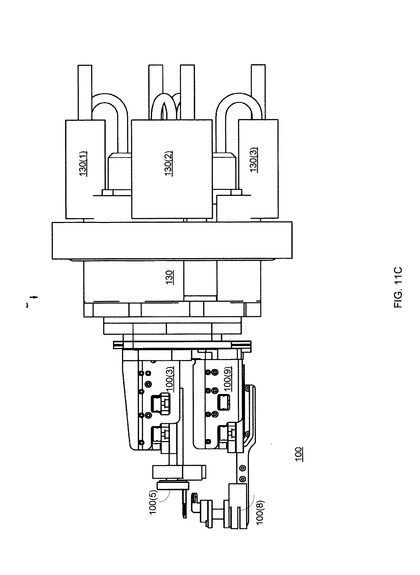
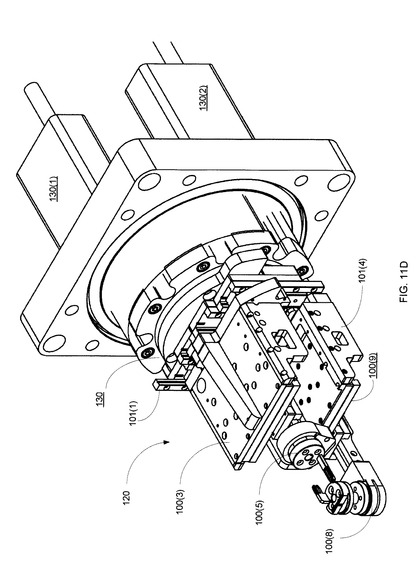
図11A〜11Cは、本発明の種々の実施形態に係るマニピュレータ100を示す。図11Aは、マニピュレータ100の正面図であり、図11Bはマニピュレータ100の平面図であり、図11Cはマニピュレータ100の側面図であり、図11Dはマニピュレータ100の3次元図である。これらは全ての本発明の実施形態によるものである。
【0094】
マニピュレータ100は、どちらも主回転ステージ130上に位置する2つの個別サブユニット110および120を含む。回転ステージ130はエンジン130(1)〜130(4)によって分離され、電力を供給される。
【0095】
第2サブユニット120は試料およびマスクを操作し、X、Y、Z、およびθステージを有する。図6では、これらのステージはXステージ100(1)、Yステージ100(2)、Zステージ100(3)、およびθステージ100(5)と表わされる。
【0096】
第1サブユニット110は試料を操作することができ、それは、例えば第2サブユニット120によって導入された移動に対してマスクを移動させることによって、マスクと試料との間の空間的関係を変更することができる。マスクおよび試料は各々、サブユニットによって移動させることができ、各々を互いに対して移動させることができ、回転ステージ130のようなステージを共用することができないことが注目される。
【0097】
第1サブユニット110はX、Y、Z、およびθステージを有することができる。図6および9のいずれにおいても、これらのステージはXステージ100(11)、Yステージ(図示せず)、Zステージ100(9)、およびθステージ100(8)と表わされる。
【0098】
第2サブユニット120はマスクを操作することができ、またマスク、較正プレート、アパーチャ、成膜用ターゲット等のような技術的アクセサリをも操作することができる。
【0099】
第1サブユニット110は、試料ホルダ(シャトル103とも呼ばれる)から試料または技術的アクセサリを受け取ることができる。シャトル103は、それが試料用のアンギュラステージ100(8)上に配置されるまで移動することができる。
【0100】
ステージは、101(1)〜101(5)と表わされるプレート、ビーム、レール、ガイドライン等のような構造要素間で接続される。
【0101】
図12を参照すると、イオンミリング装置40(イオン・スパッタリング・システムとも呼ばれる)は、以下の能力および自由度を有することができる。
a.迅速な塊状除去によるプロセスの増強のみならず、処理後の試料の最高水準の最終品質をもたらす穏便なミリングモードをも可能にする、広範囲のイオンエネルギ制御。
b.短いプロセス持続時間の高いイオン電流密度。
c.試料の均等な処理をもたらすビーム断面に沿ったイオン電流の均一性の制御。
d.試料表面の選択的ミリングを回避する試料表面に対するビームの可変入射角度。
e.多種多様な用途および技術的モードをもたらすビームの形状および大きさの制御。
f.試料処理の均等性のためのビームパルス化。
g.特定領域の試料処理をもたらすビームの正確な位置決め。
h.試料処理の均等性のための直交方向のビーム走査。
i.試料処理の均等性のための関心領域を中心とするユーセントリックビーム回転。
【0102】
イオンミリング装置40は以下を含むことができる。
a.プラズマを着火させるためのデュオプラズマトロンイオン源。
b.プラズマからXe+イオンビームを取り出しかつ捕集するビーム形成モジュール。
c.イオンビームを処理される試料に集束させ、その方向に向かわせる最終光学系。
d.一定の指定圧力の自動ガス配送を提供するXeガス供給システム。
e.プラズマ着火およびイオンビーム形成のために、計測量のガスをイオン源に自動的に供給するリーク弁。
f.イオン・スパッタリング・システムの自動制御をもたらす電子機器および電力供給装置。
【0103】
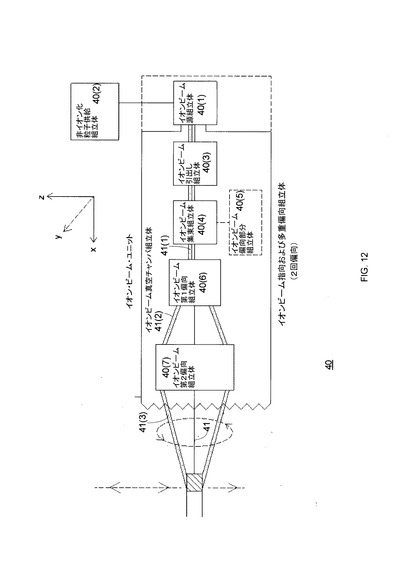
図12は、イオンビーム源組立体40(1)、非イオン化粒子供給組立体40(2)、イオンビーム引出し組立体40(3)、イオンビーム集束組立体40(4)、イオンビーム偏向部分組立体40(5)、イオンビーム第1偏向組立体40(6)、およびイオンビーム第2偏向組立体40(7)を含むものとしてイオンミリング装置40を示している。
【0104】
イオンビーム源組立体40(1)は非イオン化粒子供給組立体40(2)によって供給され、イオンビーム引出し組立体40(3)は、イオンミリング装置の光軸41に沿って伝搬するイオンビームを出力する。イオンビーム集束組立体40(4)はイオンビームを集束し、かつ集束したイオンビームをイオンビーム第1偏向組立体40(6)に供給する。イオンビーム第1偏向組立体はイオンビームを回転させて、イオンミリング装置の光軸とは相隔たる方向に沿ってイオンビームを向かわせ、偏向回転したイオンビーム41(2)を提供する。イオンビーム第2偏向組立体40(7)は、イオンビーム41(3)の回転を維持しながら、回転イオンビームを光軸の方向に向かわせる。回転はミリング角度を絶えず変化させ、より平滑なミリング済み試料を提供する。
【0105】
イオンミリング装置の非限定例は、「Directed Multi−Deflected Ion Beam Milling of a Work Piece and Determining and Controlling Extent Thereof」と称する米国特許公開出願第2008/0078750750A1号に提供されており、それを参照によって本書に援用する。
【0106】
図13A〜13Dを参照すると、システムはエアロック1300を有する。図13Aは、エアロック1300および本発明の実施形態に係る真空チャンバ91の壁91(1)の略断面図である。
【0107】
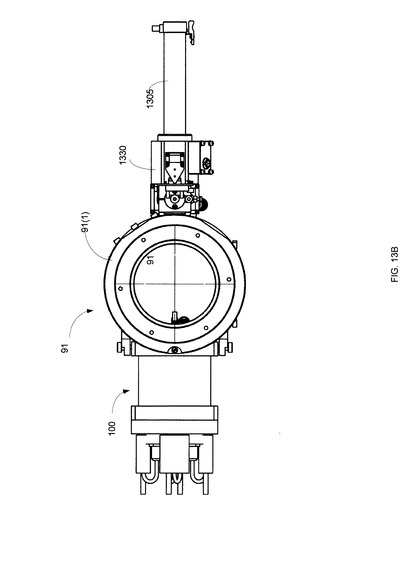
図13Bは、本発明の実施形態に係るエアロック1300、真空チャンバ91、およびマニピュレータ100の平面図である。図13Bは、供給ロッドによって支持された試料が真空チャンバ91内に入る前のエアロックを示す。
【0108】
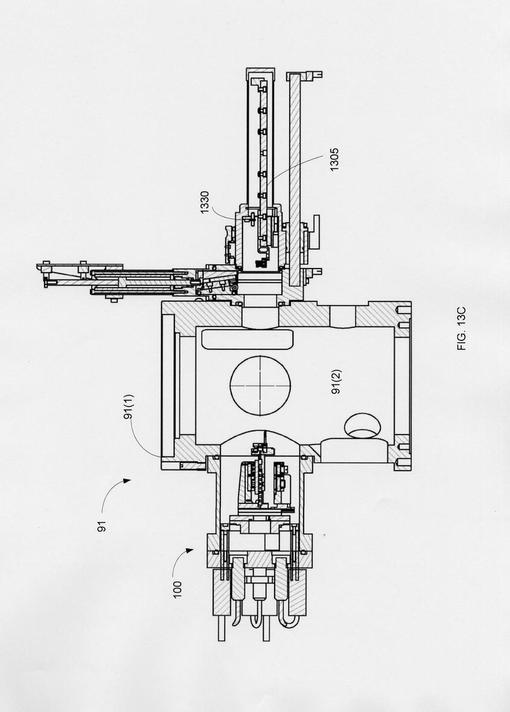
図13Cは、本発明の実施形態に係るエアロック1300、真空チャンバ91、およびマニピュレータ100の断面図である。図13Cは、供給ロッドによって支持された試料が真空チャンバ91内に入る前のエアロックを示す。
【0109】
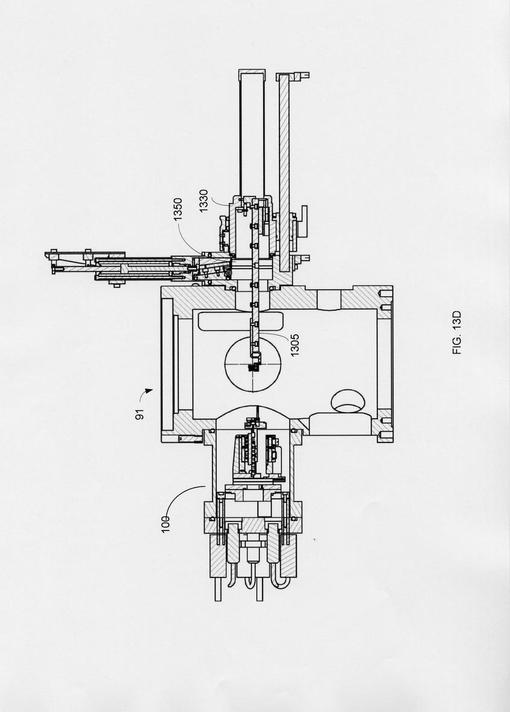
図13Dは、本発明の実施形態に係るエアロック1300、真空チャンバ91、およびマニピュレータ100の断面図である。図13Dは、供給ロッドによって支持された試料が真空チャンバ91内に配置されるときにエアロックを示す。
【0110】
エアロック1300の機能は、真空チャンバ91を通気することなく、真空チャンバ(図10に91で示す)内に多くの試料、およびマスク、較正プレート、アパーチャ、成膜用ターゲット等のような技術的アクセサリを装填/排出することを可能にすることである。
【0111】
エアロック1300は以下を含む。
a.試料および技術的アクセサリを供給システムに/から(およびマニピュレータを包囲する真空チャンバから/に)装填/排出するための主筐体1330における摺動密閉蓋1320付きの装填口1310。
b.エアロックを追加的に通気することなく、3〜5個の試料およびマスク、較正プレート、アパーチャ、成膜用ターゲット等のような技術的アクセサリを真空チャンバ内に装填することを可能にする供給ロッド1305を含む供給システム。供給ロッドの接合部(ドラム)は、試料または技術的アクセサリを担持する標準シャトルを取り付けるために多くの蟻継ぎを有する。供給ロッド1305は、その軸を中心に回転することができ、手動でまたはモータにより移動させることができる。
c.試料および技術的アクセサリを供給システムに/から装填/排出中に真空チャンバの通気を防止する遮断弁1350。
【0112】
遮断弁1350が開いたときに供給ロッド1305が真空チャンバ91に、特に真空チャンバ91の内部空間91(2)に入ることができるように、エアロック1300は真空チャンバ91の壁91(1)の開口に近接する。供給ロッド1305が真空チャンバに入る前に、エアロック1300および特に装填口(空間)は真空排気される。遮断弁1350が閉じると、気体が真空チャンバ91内に入ることが防止されるように、エアロック1300は密閉される。
【0113】
マニピュレータ100は以下のステージを含むことができ、これらのステージは以下のパラメータによって特徴付けることができる。
【0114】
主回転ステージ130:
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 最小120度
最大速度: 10度/秒
最大加速度: 1000度/秒2
エンコーダ閉ループによる位置決め精度: 150m゜
分解能: 50ミクロン
【0115】
第1サブユニット110:
X軸100(1)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 30mm
最大速度: 5mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
Y軸100(2)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 25mm
最大速度: 10mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
Z軸100(3)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 30mm
最大速度: 5mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
θ軸(軸に貫通穴は無いかもしれない)100(5)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 360度
最大速度: 45度/秒
最大加速度: 1000度/秒2
エンコーダ閉ループによる位置決め精度: 500m°
分解能: 100μ°
【0116】
第2サブユニット120:
X軸100(11)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 30mm
最大速度: 5mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
Y軸(図示せず)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 25mm
最大速度: 10mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
Z軸100(9)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 30mm
最大速度: 5mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
R軸100(8)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 360度
最大速度: 45度/秒
最大加速度: 1000度/秒2
エンコーダ閉ループによる位置決め精度: 250m°
分解能: 150μ°
【0117】
図1および5を参照して、初期試料およびミリングされた試料は以下のパラメータによって特徴付けることができる。
入力試料厚さ 20〜30ミクロン
ミリング後の試料厚さ 10〜50nm
関心領域の厚さの変動 <5nm
標的特徴の周りの薄化領域(関心領域)
厚さ<50nm 10×5μ
厚さ<100nm 30×10μ
厚さ<200nm 100×15μ
関心領域の局在性 5〜10nm
アーチファクトレベル
非晶質化 <1nm
点欠点 <1nm
Xe汚染 <10−9%
【0118】
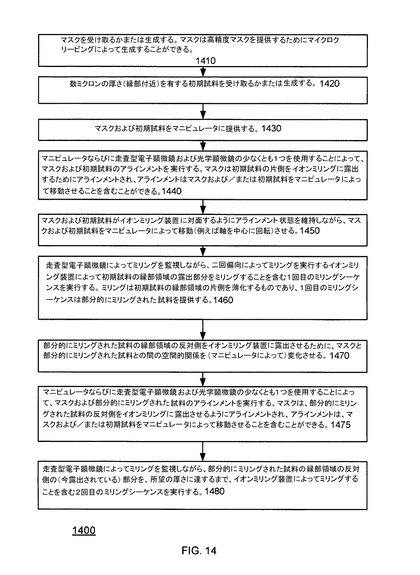
図14は、本発明の実施形態に係る方法1400を示す。
【0119】
方法1400は、マスクを受け取るかまたは生成するステージ1410から開始される。マスクは、高精度マスクを提供するためにマイクロクリービングによって生成することができる。マイクロクリービングの例は、「Apparatus for cleaving crystals」と称する米国特許6223961に示されており、これを参照によって本書に援用する。
【0120】
ステージ1410の後に、図1に示す通り、数ミクロンの厚さを(その縁部付近で)有する初期試料を受け取るかまたは生成するステージ1420が続く。初期試料は、イスラエル国のCamtek Ltd.のME3ツールによって作製することができる。
【0121】
ステージ1420の後に、マスクおよび初期試料をマニピュレータに提供するステージ1430が続く。
【0122】
ステージ1430の後に、マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび初期試料(図2)のアラインメントを実行するステージ1440が続く。マスクのアライメントは初期試料の片側をイオンミリングに露出させるように行なわれ、アラインメントはマスクおよび/または初期試料をマニピュレータによって移動させることを含む。
【0123】
ステージ1440の後に、マスクおよび初期試料がイオンミリング装置に対面するようにアラインメントを維持しながら、マスクおよび初期試料をマニピュレータによって移動(例えば軸を中心に回転)させるステージ1450が続く。
【0124】
ステージ1450の後に、走査型電子顕微鏡によってミリングを観察しながら、二重偏向によってミリングを実行するイオンミリング装置によって初期試料の縁部領域の露出部分をミリングすることを含む1回目のミリングシーケンス(図3)を実行するステージ1460が続く。該ミリングは初期試料の片側の縁部領域を薄化するものである。1回目のミリングシーケンスは、部分的にミリングされた試料を提供する。図2は、マスクが初期試料の中心から数ナノメートル(D23)離れた位置から始まるゾーンを露出させることを示す。
【0125】
ステージ1460の後に、部分的にミリングされた試料の縁部領域の反対側をイオンミリング装置に対して露出させるために、マスクと部分的にミリングされた試料との間の空間的関係を(マニピュレータによって)変化させるステージ1470が続く。
【0126】
ステージ1470の後に、マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび部分的にミリングされた試料のアラインメントを実行するステージ1475が続く。部分的にミリングされた試料の反対側をイオンミリング装置に露出させるためにマスクはアラインメントされ、アラインメントはマスクおよび/または初期試料をマニピュレータによって移動させることを含むことができる。
【0127】
ステージ1475の後に、走査型電子顕微鏡によって、かつ(任意選択的に、部分的にミリングされた試料が部分的に電子を透過し始めたときに)TEMまたはSTEM検出器によってミリングを観察しながら、部分的にミリングされた試料の縁部領域の他の(今露出されている)部分を、所望の厚さに達するまでイオンミリング装置によってミリングすることを含む2回目のミリングシーケンス(図4)を実行するステージ1480が続く。ミリングプロセスは、ミリングされた試料の厚さが所望の厚さに達したことをTEM検出器33が示したときに、自動的に停止することができる。
【0128】
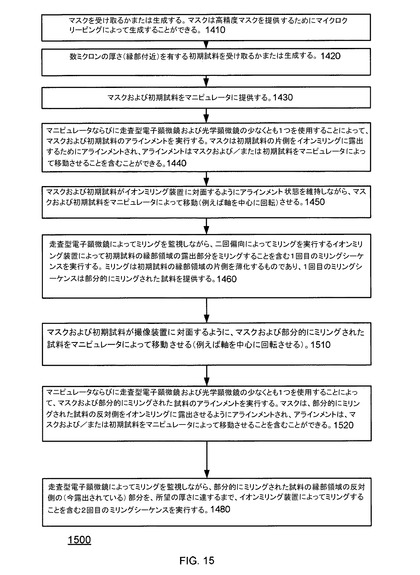
図15は、本発明の実施形態に係る方法1500を示す。
【0129】
方法1500は、マスクを受け取るかまたは生成するステージ1410から開始される。マスクは、高精度マスクを提供するためにマイクロクリービングによって生成することができる。マイクロクリービングの例は、「Apparatus for cleaving crystals」と称する米国特許6223961に示されており、これを参照によって本書に援用する。
【0130】
ステージ1410の後に、図1に示す通り、数ミクロンの厚さを(その縁部付近で)有する初期試料を受け取るかまたは生成するステージ1420が続く。初期試料は、イスラエル国のCamtek Ltd.のME3ツールによって作製することができる。
【0131】
ステージ1420の後に、マスクおよび初期試料をマニピュレータに提供するステージ1430が続く。
【0132】
ステージ1430の後に、マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび初期試料(図2)のアラインメントを実行するステージ1440が続く。マスクのアライメントは初期試料の片側をイオンミリングに露出させるように行なわれ、アラインメントはマスクおよび/または初期試料をマニピュレータによって移動させることを含む。
【0133】
ステージ1440の後に、マスクおよび初期試料がイオンミリング装置に対面するようにアラインメントを維持しながら、マスクおよび初期試料をマニピュレータによって移動(例えば軸を中心に回転)させるステージ1450が続く。
【0134】
ステージ1450の後に、走査型電子顕微鏡によってミリングを観察しながら、二重偏向によってミリングを実行するイオンミリング装置によって初期試料の縁部領域の露出部分をミリングすることを含む1回目のミリングシーケンス(図3)を実行するステージ1460が続く。該ミリングは初期試料の片側の縁部領域を薄化するものである。1回目のミリングシーケンスは、部分的にミリングされた試料を提供する。図2は、マスクが初期試料の中心から数ナノメートル(D23)離れた位置から始まるゾーンを露出させることを示す。
【0135】
ステージ1460の後に、マスクおよび初期試料が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって移動(例えば軸を中心に回転)させるステージ1510が続く。
【0136】
ステージ1510の後に、マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび部分的にミリングされた試料のアラインメントを実行するステージ1520が続く。部分的にミリングされた試料の反対側をイオンミリングに露出させるために、マスクがアラインメントされ、アラインメントはマスクおよび/または初期試料をマニピュレータによって移動させることを含むことができる。
【0137】
ステージ1520の後に、走査型電子顕微鏡によって、かつ(任意選択的に、部分的にミリングされた試料が部分的に電子を透過し始めたときに)TEMまたはSTEM検出器によってミリングを観察しながら、部分的にミリングされた試料の縁部領域の他の(今露出されている)部分を、所望の厚さに達するまでイオンミリング装置によってミリングすることを含む2回目のミリングシーケンス(図4)を実行するステージ1480が続く。ミリングプロセスは、ミリングされた試料の厚さが所望の厚さに達したことをTEM検出器33が示したときに、自動的に停止することができる。ミリングされた試料(または少なくともそのミリングされた縁部)は、SETMまたはTEMによって観察される標的を含むはずである。
【0138】
図14および15は二重ミリングプロセスを示すが、該方法は、マスクと試料との間の空間的関係の変更およびマスクと試料とのアラインメントを先行させて、3つ以上のミリングステージを含むことができることが注目される。
【0139】
上に示した方法の各々の結果は、標的を含みかつTEMまたはSTEM試料となるように電子を透過させる、非常に薄い関心領域である。
【0140】
本発明は、従来のツール、方法論、および構成部品を使用することによって実施することができる。したがってそのようなツール、構成部品、および方法論についてここでは詳細に記載しない。これまでの説明で、本発明の完全な理解をもたらすために多くの明確な詳細を記載している。しかし本発明は、明確に記載した詳細に頼ることなく、実施することができることを認識されたい。
【0141】
本開示では、本発明の例示的実施形態およびその多様性の数例を示しかつ記載しただけである。本発明は、種々の他の組合せおよび環境での使用が可能であり、かつ本書に明記する発明の概念の範囲内で変化または変形が可能であることを理解されたい。
【技術分野】
【0001】
関連出願
本願は、2010年7月6日に出願された米国仮特許出願No.61/361536からの優先権の利益を主張する。この出願の内容は参考としてここに組み入れられる。
【0002】
発明の分野
本発明は、透過型電子顕微鏡法用の試料を作製するための方法およびシステムに関する。
【背景技術】
【0003】
発明の背景
透過型電子顕微鏡法(TEM)は、電子ビームを薄片試料に透過させて、それが検体を通過するときに検体と相互作用させる技術である。検体を透過した電子の相互作用から、高解像画像を形成することができる。薄片試料は数ナノメートルの厚さを有することができる。
【0004】
TEM試料の作製は、試料ホルダ要素に接続される試料を受け取るか製造することによって開始することができる。イオンミリング前の試料と試料ホルダ要素との組合せを初期試料と呼ぶ。
【0005】
試料ホルダ要素は数ミクロンよりずっと厚く、マニピュレータによって保持することができる。試料ホルダ要素は、試料に接着剤で接着するかまたは他の方法で接続することができる。試料の縁部領域または試料の縁部領域付近の領域は機械的工程によって薄化し、次いでイオンミリング装置によってさらに薄化して、電子にとって透明であることができかつTEM試料として使用することができる、非常に薄い領域を提供することができる。
【0006】
図1は、先行技術の初期試料21を示す。初期試料21は試料ホルダ要素29および試料28を含む。試料ホルダ要素29は半円形として形成される。試料ホルダ要素29の直線状縁部は、試料28の第1縁部に接続される。試料28の上部は薄化され、縁部25で終端する事前薄化領域21(2)を提供する。
【0007】
事前薄化領域21(2)は深さ(高さ)21(7)および幅21(3)を有する。事前薄化領域21(2)は、TEM試料に含めるべき標的21(5)を含む関心領域21(4)を含む。
【0008】
透過型電子顕微鏡法用の薄片試料を生成するための方法およびシステムを提供する必要性は高まっている。
【発明の概要】
【0009】
本発明の実施形態では、試料を作製するための方法を提供する。該方法は以下のステップを含むことができる。
a.マスクおよび初期試料をマニピュレータによって受け取るステップ。
b.マスクおよび初期試料の縁部領域の第1側が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置すること。
c.マスクで初期試料の縁部領域のマスキング部分を遮蔽しながら、初期試料の縁部領域の露出部分を非マスキング状態に維持するように、マスクおよび初期試料のアラインメントをマニピュレータによって実行するステップ。アラインメントの実行は、マスクおよび初期試料の画像を撮像装置によって得ることを含むことができる。
d.マスクと初期試料との間の空間的関係を変化させることなく、マスクおよび初期試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
e.マスキング部分をマスクによって遮蔽しながら、初期試料の縁部領域の露出部分をイオンミリング装置によってミリングして、部分的にミリングされた試料を提供するステップ。
f.マスクおよび初期試料の縁部領域の第2側が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置するステップ。第2側は第1側とは異なる。第1側および第2側は縁部領域の両側とすることができる。
g.マスクが部分的にミリングされた試料の縁部領域のマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分を非マスキング状態に維持するように、マスクおよび初期試料のアラインメントをマニピュレータによって実行するステップ。アラインメントの実行は、マスクおよび部分的にミリングされた試料の画像を撮像装置によって得ることを含むことができる。
h.マスクと部分的にミリングされた試料との間の空間的関係を変化させることなく、マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置に対面するように、マスクおよび部分的にミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
i.マスクによってマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングして、ミリングされた試料を提供するステップ。
【0010】
マスクおよび初期試料をイオンミリング装置の前に配置するステップは、マスクおよび初期試料をマニピュレータによって回転させることを含むことができる。
【0011】
部分的にミリングされた試料の縁部領域の露出部分をミリングするステップは、ミリング中に、撮像装置の透過型検出器によってミリングされた試料の縁部領域の厚さを監視することを含むことができる。
【0012】
該方法は、部分的にミリングされた試料の縁部領域のミリング中に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させることを含むことができる。かくして、以前にマスキングされた領域を除去し、それによって縁部領域を要求される厚さまで薄化するために、マスク領域の以前にマスキングされた領域を露出させるようにマスクを移動させることができる。
【0013】
該方法は、部分的にミリングされた試料のミリング後に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させることを含むことができる。かくして、以前にマスキングされた領域を除去し、それによって縁部領域を要求される厚さまで薄化するために、マスク領域の以前にマスキングされた領域を露出させるようにマスクを移動させることができる。
【0014】
撮像装置の光軸はミリング工具の光軸に対し直角を成すことができる。マニピュレータは、マスクおよび初期試料がイオンミリング装置に対面するように、それらを90度回転させることができる。
【0015】
該方法は以下のステップを含むことができる。
a.マスクおよび初期試料の縁部領域の第1側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによって配置するステップ。
b.マスクおよび初期試料の縁部領域の第1側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
c.マスクおよび初期試料の縁部領域の第2側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置するステップ。
d.マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび部分的にミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
【0016】
初期試料の縁部領域は少なくとも1ミクロンの厚さを有し、ミリングされた試料の縁部領域の厚さは50ナノメートルを超えない。
【0017】
ミリングするステップは、イオンミリング装置の光軸を中心にミリングビームを回転させながら試料をミリングすることを含むことができる。
【0018】
該方法は、部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によって除去することを含むことができる。
【0019】
該方法は、部分的にミリングされた試料の縁部領域の厚さに基づいて、部分的にミリングされた試料の縁部領域のミリングを停止することを含むことができる。
【0020】
該方法は、撮像装置の透過型検出器によって部分的にミリングされた試料の縁部領域の厚さを監視することを含むことができる。
【0021】
該方法は、撮像装置の透過型検出器によって出力される電流を、電流値と厚さの値との間の予め定められた関係と比較することを含むことができる。
【0022】
該方法は以下のステップを含むことができる。
a.マスクおよびミリングされた試料の縁部領域の第1側が撮像装置に対面するように、マスクおよびミリングされた試料をマニピュレータによって撮像装置の前に配置するステップ。
b.ミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクがミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよびミリングされた試料のアラインメントをマニピュレータによって実行するステップ。アラインメントの実行は、撮像装置によってマスクおよびミリングされた試料の画像を得ることを含むことができる。
c.マスクとミリングされた試料との間の空間的関係を変化させることなく、マスクおよびミリングされた試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよびミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
d.マスキング部分をマスクによって遮蔽しながら、ミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングして、さらにミリングされた試料を提供するステップ。
【0023】
画像を得るステップは、撮像装置、すなわち光学装置、走査型電子顕微鏡、または光学装置と走査型電子顕微鏡との組合せによって、実行することができる。
【0024】
該方法は、後方散乱電子検出器によって初期試料のミリングの進捗を監視するステップと、部分的にミリングされた試料のミリングの完了を透過型検出器によって監視するステップとを含むことができる。
【0025】
該方法は、部分的にミリングされた試料の縁部領域が所望の厚さに達したときに、部分的にミリングされた試料のミリングを自動的に停止することを含むことができる。
【0026】
本発明の実施形態では、試料作製システムを提供し、それはマニピュレータ、撮像装置、およびイオンミリング装置を含むことができる。
a.マニピュレータは、次のように構成されることができる。
1.マスクおよび初期試料を受け取る。
2.マスクおよび初期試料の縁部領域の第1側が撮像装置に対面するように、マスクおよび初期試料を撮像装置の前に配置する。
3.初期試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクが初期試料の縁部領域のマスキング部分を遮蔽するように、マスクおよび初期試料のアラインメントに関与する。マニピュレータは、マスクおよび初期試料を要求される位置に配置するときに、アラインメントプロセスに関与する。アラインメントプロセスはさらにマスクおよび初期試料の画像の取得、画像の処理、ならびにコマンドの(オペレータから、コントローラから、手動的または自動的な)マニピュレータへの提供を必要とするかもしれない。
4.マスクと初期試料との間の空間的関係を変化させることなく、マスクおよび初期試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよび初期試料をイオンミリング装置の前に配置する。
b.イオンミリング装置は、マスキング部分をマスクによって遮蔽しながら、初期試料の縁部領域の露出部分をミリングして、部分的にミリングされた試料を提供するように構成することができる。
c.マニピュレータはさらに、次のように構成される。
1.マスクおよび初期試料の縁部領域の第2側が撮像装置と対面するようにマスクおよび初期試料を撮像装置の前に配置する。ここで第2側は第1側とは異なる。
2.部分的にミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクが部分的にミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよび部分的にミリングされた試料のアラインメントに関与する。マニピュレータは、マスクおよび部分的にミリングされた試料を要求される位置に配置するときに、アラインメントプロセスに関与する。アラインメントプロセスはさらにマスクおよび部分的にミリングされた試料の画像の取得、画像の処理、ならびにコマンドの(オペレータから、コントローラから、手動的または自動的な)マニピュレータへの提供を必要とするかもしれない。
3.マスクと部分的にミリングされた試料との間の空間的関係を変化させることなく、マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置に対面するように、マスクおよび部分的にミリングされた試料をイオンミリング装置の前に配置する。
d.イオンミリング装置はさらに、マスクによってマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分をミリングして、ミリングされた試料を提供するように適応されることができる。
e.撮像装置は次のように構成されることができる。
1.マスクおよび初期試料のアラインメント中に、マスクおよび初期試料の画像を得る。
2.マスクおよび部分的にミリングされた試料のアラインメント中に、マスクおよび部分的にミリングされた試料の画像を得る。
【0027】
撮像装置は、光学装置、走査型電子顕微鏡、またはそれらの組合せとすることができる。
【0028】
システムマニピュレータは、マスクおよび初期試料がイオンミリング装置と対面するまで、マスクおよび初期試料を回転させるように構成されることができる。
【0029】
撮像システムは、部分的にミリングされた試料の縁部領域の露出部分のミリング中に、部分的にミリングされた試料の縁部領域の露出部分の厚さを示す検出信号を提供するように構成された透過型検出器を含むことができる。
【0030】
マニピュレータは、部分的にミリングされた試料の縁部領域のミリング中に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させるように構成されることができる。
【0031】
システムは、部分的にミリングされた試料のミリング後に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させるように構成されることができる。
【0032】
撮像装置の光軸はミリング工具の光軸に対し直角を成すことができ、マニピュレータは、マスクおよび初期試料がイオンミリング装置に対面するまで、マスクおよび初期試料を回転させるように構成されることができる。
【0033】
マニピュレータは次のように構成されることができる。
a.マスクおよび初期試料の縁部領域の第1側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料を配置する。
b.マスクおよび初期試料の縁部領域の第1側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび初期試料をイオンミリング装置の前に配置する。
c.マスクおよび初期試料の縁部領域の第2側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料を撮像装置の前に配置する。
d.マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび部分的にミリングされた試料をイオンミリング装置の前に配置する。
【0034】
初期試料の縁部領域は、少なくとも1ミクロンの厚さを有し、システムは、ミリングされた試料の縁部領域が50ナノメートルを超えない厚さになるまで、ミリングされた試料の縁部領域をミリングするように構成されることができる。
【0035】
イオンミリング装置は、イオンミリング装置の光軸を中心にミリングビームを回転させながら、ミリングを行なうように構成されることができる。
【0036】
イオンミリング装置は、部分的にミリングされた試料の縁部領域の露出部分を除去するように構成されることができる。
【0037】
システムは、部分的にミリングされた試料の縁部領域の厚さに基づいて、部分的にミリングされた試料の縁部領域のミリングを停止するように構成されることのできるコントローラを含むことができる。
【0038】
システムは、部分的にミリングされた試料の縁部領域の厚さの監視を支援するように構成することのできる透過型検出器を含むことができる。透過型検出器は、試料の縁部領域の厚さを示す検出信号を提供することによって、監視を支援する。検出信号は既知の厚さを表わし、したがって縁部領域の実際の厚さを検出するように処理することができる。
【0039】
システムは、撮像装置の透過型検出器によって出力された電流を、電流値と厚さの値との間の予め定められた関係と比較するように構成されることのできるコントローラを含むことができる。
【0040】
システムは、初期試料のミリングの進捗の監視に関与するように構成された後方散乱電子検出器と、部分的にミリングされた試料のミリングの完了の監視を支援するように構成されることのできる透過型検出器とを含むことができる。
【0041】
システムは、部分的にミリングされた試料の縁部領域の所望の厚さに達したときに、部分的にミリングされた試料のミリングを自動的に停止するように構成されることのできるコントローラを含むことができる。
【0042】
イオンミリング装置はさらに、マスキング部分がマスクによって遮蔽されている間に、ミリングされた試料の縁部領域の露出部分をミリングして、さらにミリングされた試料を構成されることができる。
【0043】
マニピュレータはさらに次のように構成されることができる。
a.マスクおよびミリングされた試料の縁部領域の第1側が撮像装置に対面するように、マスクおよびミリングされた試料を撮像装置の前に配置する。
b.ミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクがミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよびミリングされた試料のアラインメントに関与する。
c.マスクとミリングされた試料との間の空間的関係を変化させることなく、マスクおよびミリングされた試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよびミリングされた試料をイオンミリング装置の前に配置する。
【図面の簡単な説明】
【0044】
本発明のさらなる詳細、態様、および実施形態を単なる例として図面に関連して説明する。図面では、類似の要素または機能的に同様の要素を識別するために同様の参照番号を使用する。図中の要素は、簡潔および明確を期すように示されており、必ずしも一定の縮尺で描かれてはいない。
【0045】
【図1】図1は、先行技術の初期試料を示す。
【0046】
【図2】図2は、本発明の実施形態に係るアラインメントステージ中のシステムの一部分を示す。
【0047】
【図3】図3は、本発明の実施形態に係る1回目のミリングシーケンス中のシステムの一部分を示す。
【0048】
【図4】図4は、本発明の実施形態に係る2回目のミリングシーケンス中のシステムの一部分を示す。
【0049】
【図5】図5は、本発明の実施形態に係るミリングされた試料を示す。
【0050】
【図6】図6は、本発明の実施形態に係るマニピュレータを示す。
【0051】
【図7】図7は、本発明の実施形態に係る試料ホルダ、初期試料、およびマニピュレータの一部分を示す。
【0052】
【図8】図8は、本発明の実施形態に係る試料ホルダを示す。
【図9】図9は、本発明の実施形態に係る試料ホルダを示す。
【0053】
【図10】図10は、本発明の実施形態に係るシステムを示す。
【0054】
【図11A】図11Aは、本発明の実施形態に係るシステムの一部分を示す。
【図11B】図11Bは、本発明の別の実施形態に係るシステムの一部分を示す。
【図11C】図11Cは、本発明のさらに別の実施形態に係るシステムの一部分を示す。
【図11D】図11Dは、本発明のさらに別の実施形態に係るシステムの一部分を示す。
【0055】
【図12】図12は、本発明の実施形態に係るイオンミリング装置を示す。
【0056】
【図13A】図13Aは、本発明の実施形態に係るエアロック組立体を示す。
【図13B】図13Bは、本発明の別の実施形態に係るエアロック組立体を示す。
【図13C】図13Cは、本発明のさらに別の実施形態に係るエアロック組立体を示す。
【図13D】図13Dは、本発明のさらに別の実施形態に係るエアロック組立体を示す。
【0057】
【図14】図14は、本発明の実施形態に係る方法を示す。
【0058】
【図15】図15は、本発明の実施形態に係る方法を示す。
【発明を実施するための形態】
【0059】
本発明の上述および他の目的、特徴、および利点は、以下の詳細な説明を添付の図面と照らし合わせて読んだときに、いっそう明瞭になるであろう。図面では、同様の参照符号は様々な図全体で同様の要素を表わす。
【0060】
本発明の図示した実施形態は大部分が、当業者に公知の電子部品および回路を用いて実現することができるので、本発明の基礎を成す概念を理解し評価するために、かつ本発明の教示を曖昧にあるいは分かりにくくしないためにも、必要と思われる程度以上には詳述しない。
【0061】
縁部領域という用語は、その通常の意味を有する。それは縁部に近接する領域であると解釈することができ、あるいは縁部によって範囲を定めることができる。試料の縁部領域は試料の縁部に近接するか、または縁部によって範囲を定めることができる。それは標的を含むことができる。試料の縁部領域は、TEM試料を形成するようにイオンミリングによって薄化することができる。縁部領域のミリング後の厚さは51ナノメートル未満とすることができる。その幅および長さは、1ミクロン以上とすることができるが、他の寸法を提供することができる。縁部領域は、矩形の形状を有するものとして図示されているが、これは必ずしもそうする必要はなく、他の形状を持つことができる。
【0062】
本発明の実施形態では、方法を提供する。該方法は、以下を含むことができる。
a.マスクを生成または受け取るステップ。マスクは高精度マスクをもたらすためにマイクロクリービング(micro−cleaving)プロセスによって製造することができる。
b.数ミクロンの厚さ(その縁部付近)を有する初期試料を受け取るか生成する。図1に示す実施例を参照すると、初期試料の厚さは、事前薄化領域21(2)の厚さである。
c.マスクおよび初期試料をマニピュレータに提供する。図1に示す実施例を参照すると、マニピュレータは試料ホルダ要素29を保持する。
d.マニピュレータを使用することによってマスクおよび初期試料のアラインメントを行ない、かつ走査型電子顕微鏡、光学顕微鏡、またはそれらの組合せによってアラインメントプロセスを観察する。アラインメントプロセスは、マスクおよび初期試料の1つ以上を1つ以上の軸に沿って、所望の空間関係が達成されるまで移動させることを含むことができる。例えば、アラインメントはマスクおよび初期試料をそれらが互いに平行になり、かつマスクが取り除くべき初期試料の部分だけを暴露させるまで位置させることを含むことができる。図1の初期試料を参照すると、マスクは、マスクの縁部領域が(X軸に沿って)縁部25と平行になり、かつ事前薄化領域の半分以上だけをマスキングするように配置することができる。事前薄化領域の正確な半分からのわずかな逸脱は、TEM試料の期待される幅の約半分である。TEM試料は、事前薄化領域と同一の厚さを有することができる。代替的に、図1のマスキング要素は、ミリングを実行する前に少なくとも部分的に除去することができる。
e.マスクおよび初期試料がイオンミリング装置に対面するようにアラインメントを維持しながら、軸を中心にマスクおよび初期試料を回転させる。マスクおよび初期試料は、それらがイオンミリング装置の視野内に位置するという意味で、イオンミリング装置に対面する。それらはイオンミリング装置の光軸に対し直角を成すことができるが、光軸から90度とは異なる角度に向けてもよい。イオンミリング装置がミリングプロセス中に照射角度を変更した場合、イオンミリング装置の光軸は、異なるミリング角度の関数として画定することができる。例えば、光軸は異なるミリング角度の平均とすることができる。
f.初期試料の縁部領域の露出部分をイオンミリング装置によってミリングすることを含む1回目のミリングシーケンスを実行する。イオンミリング装置は、走査型電子顕微鏡によってミリングを観察しながら、二重偏向技術によってミリングすることができる。
g.部分的にミリングされた試料の縁部領域の他の側をイオンミリング装置に露出させるために、マスクと部分的にミリングされた試料との間の空間的関係を(マニピュレータによって)変化させる。
h.マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび部分的にミリングされた試料のアラインメントを実行する。部分的にミリングされた試料の他の側をイオンミリングに露出させるようにマスクはアラインメントされ、アラインメントは、マスクおよび/または初期試料をマニピュレータによって移動させることを含むことができる。
i.ミリングを走査型電子顕微鏡によって観察しながら、部分的にミリングされた試料の縁部領域の他の(現在露出されている)部分を、所望の厚さに達するまでイオンミリング装置によってミリングすることを含む2回目のミリングシーケンスを実行する。
【0063】
システムは、全ミリングプロセス中に、試料を連続的にかつ実時間モードで観察することができ、かつプロセスの精度、品質、および停止の完全自動制御を行なうことができる。
【0064】
図2〜4および図10を参照すると、システム10は以下を含むことができる。
a.マニピュレータ100。マニピュレータ100は、種々のステージにおける複数の操作要素を含むことができる。
b.走査型電子顕微鏡(SEM)のような撮像装置。SEMは例えば対物レンズ30、BSE検出器32、SE検出器34、TEM検出器33のみならず、SEMカラム35に含むことのできる電子源、電子光学系、および他の構成要素をも含むことができる。
c.イオンミリング装置40。
d.システムの様々な構成要素を制御するコントローラ(図10に99で表わす)。
【0065】
システム10はまた、真空システム90、真空チャンバ91、光学顕微鏡92、防振システム94、ベース96、エアロック1300、およびベースプレート98をも含むことができる。イオン・ビーム・ユニット40は、Xe供給ユニット42およびイオン銃44のような種々の構成要素(一部は図10および12に示されている)を含むことができる。
【0066】
システム10は、マスク50を生成するか受け取ることができる。マスクは、高精度マスクを提供するためにマイクロクリービングによって製造することができる。システムがマスク50を生成する場合、それはマイクロクリービングユニット(図示せず)を含む。
【0067】
図6は、マニピュレータ100およびエアロック1300の供給ロッド1305の一部を示す。
【0068】
マニピュレータ100は、どちらも主回転ステージ130上に位置する2つの個別サブユニット110および120を含む。
【0069】
第2サブユニット120は試料およびマスクを操作し、X、Y、Z、およびθステージを有する。図6では、これらのステージはXステージ100(1)、Yステージ100(2)、Zステージ100(3)、およびθステージ100(5)と表わされる。
【0070】
第1サブユニット110は試料を操作することができ、それは、例えば第2サブユニット120によって導入された移動に対してマスクを移動させることによって、マスクと試料との間の空間的関係を変更することができる。マスクおよび試料は各々、サブユニットによって移動させることができ、各々を互いに対して移動させることができ、回転ステージ130のようなステージを共用することができないことが注目される。
【0071】
第1サブユニット110はX、Y、Z、およびθステージを有することができる。図6および9のいずれにおいても、これらのステージはXステージ100(11)、Yステージ(図示せず)、Zステージ100(9)、およびθステージ100(8)と表わされる。
【0072】
第2サブユニット120はマスクを操作することができ、またマスク、較正プレート、アパーチャ、成膜用ターゲット等のような技術的アクセサリをも操作することができる。
【0073】
第1サブユニット110は、試料ホルダ(シャトル103とも呼ばれる)から試料または技術的アクセサリを受け取ることができる。シャトル103は、それが試料用のアンギュラステージ100(8)上に配置されるまで移動することができる。
【0074】
ステージは、101(1)〜101(5)と表わされるプレート、ビーム、レール、ガイドライン等のような構造要素間で接続される。
【0075】
図7は、マスク50によってマスキングされ、シャトル103によって保持された初期試料21をより詳細に示す。図7はまた、初期試料21の上に位置する固定アパーチャマスク111をも示す。イオンビームは固定アパーチャマスク111のアパーチャを通過するはずである。固定アパーチャマスク111は、イオンミリングの結果生じる副次的損傷を防止する。それは初期試料21に対して固定される。図7はまた、初期試料21がロックロードから(またはロックロードに)もたらされるときに、初期試料21を支持することのできる要素333をも示す。図7は、初期試料21がシャトル103に受け取られその上に配置された後の要素333を示す。
【0076】
図8は、2つの相互垂直蟻継ぎ1031および1032を含むシャトル103を示す。シャトル103はまた、間隔を置いて配置されそれらの間の狭い空間に試料21を保持する2つのブロック1033および1034をも含む。図9は、マニピュレータエンジン131のみならず種々の構成要素をも示す。
【0077】
図2を参照すると、初期試料21とマスク50との間のアラインメントプロセスを監視するために、検出器32および/または検出器34を使用する走査型電子顕微鏡が用いられる。
【0078】
アラインメントプロセスは、(a)マスク50および初期試料21が互いに平行になる(両方とも水平とすることができる)かまたは任意の他の仕方で配置され、かつ(b)マスク50の縁部領域が、1回目のミリングシーケンス中にミリングされた後の初期試料21の所望のミリング後の縁部を表わす想像線の真上に位置されるように、マスク50および初期試料21のアラインメントを実行することを含むことができる。この想像線は、ミリングされる試料21の中心から数ナノメートルの位置に配置されることができる。破線55は、マスク50がアラインメントプロセスの終端に対して水平であることを示している。初期試料21の縁部25上のマスク50の縁部53の軌跡と初期試料21の中心22との間の距離(D23)は数ナノメートルである。それはミリング後の試料の最終厚さの約2分の1である。
【0079】
アラインメントプロセスの目的は、マスクがイオンミリング装置と初期試料21との間に配置された後、初期試料の予め定められた露出部分をイオンミリング装置にミリングさせる一方、初期試料の予め定められたマスキング部分をイオンミリング装置がミリングすることをそれ(マスク)が防止することを保証することである。
【0080】
ひとたびアラインメントプロセスが終了すると、マスク50および初期試料21は移動する(例えば回転する)。回転は、マスク50と初期試料21との間の空間的関係を変えずに維持しながら、主回転ステージ130によって、軸を中心に(例えばX軸を中心に)実行することができる。ひとたびマスク50および初期試料21がイオンミリング装置40に対面すると、移動(回転)は停止することができる。
【0081】
イオンミリング装置40は、(検出器32および/または検出器34を使用して)走査型電子顕微鏡によってミリングを観察しながら、初期試料21の縁部領域の露出部分を二重偏向によってミリングすることを含む1回目のミリングシーケンスを実行する。ミリングはさらに、初期試料21の片側の事前薄化領域をさらに薄化して、部分的にミリングされた試料(図4に21´で表わされる)のミリング済みの側を(図4に24で表わされる)を提供する。イオンビーム42はXY面内で偏向することができるが、これは必ずしもそうでなくてもよい。
【0082】
初期試料の片側がミリングされ(部分的にミリングされた試料21´が提供された)後、マニピュレータ100は、部分的にミリングされた試料21´の縁部領域の反対側をイオンミリング装置40に露出させるために、マスク50と部分的にミリングされた試料21´との間の空間的関係を変化させる。これは、試料回転ステージ100(8)上でその軸(112)を中心に部分的にミリングされた試料21´を回転させることを含むことができ、かつマスク50の高さを変更することをも含むことができる。
【0083】
本発明の実施形態では、所望のアラインメントが得られることを保証するために撮像システムがマスクおよび部分的にミリングされた試料の画像を取得するアラインメントプロセス中、空間的関係の変化は制御される。アラインメントに先立ち、アラインメントを実行する撮像システムに対面するまでマスクおよび部分的にミリングされた試料を移動(例えば回転)させ、次いでイオンミリング装置に対面するまでマスクおよび部分的にミリングされた試料を移動(例えば回転)させることができる。
【0084】
空間的関係を変化させた後、イオンミリング装置40は、走査型電子顕微鏡および(任意選択的に、部分的にミリングされた試料が電子を部分的に透過し始めたときに)TEMまたはSTEM検出器33によってミリングを観察しながら、部分的にミリングされた試料21´の縁部領域の他の(今露出されている)部分を所望の厚さに達するまでミリングすることを含む、2回目のミリングシーケンスを実行する。ミリングプロセスは、ミリングされた試料の厚さが所望の厚さに達したことがTEM検出器33により示されたときに、自動的に停止することができる。
【0085】
システム10は、格納式BSE検出器、SE検出器、またはそれらの組合せを含むことができる。スパッタ率の高い初期イオンミリング中に、試料の観察は、図2に対物レンズ30の磁極片の下に位置するように示された格納式BSE検出器32によって達成することができる。
【0086】
試料がまだ入射一次電子を透過しないイオンミリングの中間ステージで高解像度画像を得るために、SE検出器34およびBSE検出器32の組合せを使用することができる。
【0087】
試料が一次電子を透過する、イオンミリングの最終ステージで高解像度画像を得るために、透過型(TE)検出が使用される。試料アラインメントプロセスの標的識別をオペレータが、3つの上記検出器、すなわちSE、BSE、およびTEの組合せによって実行することができる。
【0088】
ミリングされた試料21″の最終厚さは、透過型(TE)検出器33からの出力電流の測定によって決定することができる。これらの出力電流対試料厚さの較正曲線が、試料の様々な材料成分について予め定められた分析条件に対し計算される。そのような曲線の例を図11に示す。これらの曲線は、これらの曲線は検出器の追加出力であり、データは〜ミリングプロセスを自動的に停止させる。完成したTEM試料と共に厚さマップが提供される。
【0089】
SE検出器34は、シンチレータおよび光電子増倍管の組合せを含むEverhart−Thornley型検出器とすることができる。SE検出器34は、システムチャンバの側壁に取り付けることができる。SE検出器34は、電流モードで動作することができる。イオンミリング中に、SE検出器34は保護シャッタ35によって保護される。図2はSE検出器34を、対物レンズ30の右側に位置するように示されているが、これは必ずしもそうでなくてもよい。
【0090】
BSE検出器32は、極端に短い作業距離が必要なときに高解像度観察モードを得るために、その格納を可能にするように対物レンズ30の磁極片の下に配置することのできる、固体半導体検出器とすることができる。BSE検出器32は電流モードで動作することができる。BSE32検出器は、イオンミリング中に試料表面の観察のために使用することができる。
【0091】
TE検出器33は、電気的に互いに絶縁された3つの独立部品を含むことができる。第1明視野TE33(1)検出器と呼ばれる第1の部品は、試料の下の顕微鏡主軸上に配置されるディスクとすることができる。それは、小さい角度で散乱する透過電子の検出専用である。第2の部品は、第2明視野TE検出器33(2)と呼ばれ、第1明視野TE検出器と同軸のリングを表わす。それは、小さい角度であるが第1明視野TE検出器の場合よりは大きい角度で散乱する透過電子の検出専用である。暗視野TE検出器33(3)と呼ばれる第3の部品は、第2明視野TE検出器と同軸のリングを表わす。それは、比較的大きい角度で散乱する透過電子の検出専用である。これら3つのTE検出器部品は全て固体半導体検出器とすることができ、約1に等しい原子数分解能を有することができ、電流モードで働くことができる。イオンミリング中に、TE検出器33は、試料21の下の顕微鏡主軸上のその頂部に配置された保護シャッタのファラデーカップによって保護することができる。それは、処理済み試料の厚さ測定用のTE検出器のその後の較正を達成するために、電子プローブ電流の測定専用とすることができる。
【0092】
検出器の数、それらの位置、検出器の種類、および各検出器の部品数(ならびにそれらの大きさおよび形状)は、上に示した実施例とは異なることができることが注目される。
【0093】
図11A〜11Cは、本発明の種々の実施形態に係るマニピュレータ100を示す。図11Aは、マニピュレータ100の正面図であり、図11Bはマニピュレータ100の平面図であり、図11Cはマニピュレータ100の側面図であり、図11Dはマニピュレータ100の3次元図である。これらは全ての本発明の実施形態によるものである。
【0094】
マニピュレータ100は、どちらも主回転ステージ130上に位置する2つの個別サブユニット110および120を含む。回転ステージ130はエンジン130(1)〜130(4)によって分離され、電力を供給される。
【0095】
第2サブユニット120は試料およびマスクを操作し、X、Y、Z、およびθステージを有する。図6では、これらのステージはXステージ100(1)、Yステージ100(2)、Zステージ100(3)、およびθステージ100(5)と表わされる。
【0096】
第1サブユニット110は試料を操作することができ、それは、例えば第2サブユニット120によって導入された移動に対してマスクを移動させることによって、マスクと試料との間の空間的関係を変更することができる。マスクおよび試料は各々、サブユニットによって移動させることができ、各々を互いに対して移動させることができ、回転ステージ130のようなステージを共用することができないことが注目される。
【0097】
第1サブユニット110はX、Y、Z、およびθステージを有することができる。図6および9のいずれにおいても、これらのステージはXステージ100(11)、Yステージ(図示せず)、Zステージ100(9)、およびθステージ100(8)と表わされる。
【0098】
第2サブユニット120はマスクを操作することができ、またマスク、較正プレート、アパーチャ、成膜用ターゲット等のような技術的アクセサリをも操作することができる。
【0099】
第1サブユニット110は、試料ホルダ(シャトル103とも呼ばれる)から試料または技術的アクセサリを受け取ることができる。シャトル103は、それが試料用のアンギュラステージ100(8)上に配置されるまで移動することができる。
【0100】
ステージは、101(1)〜101(5)と表わされるプレート、ビーム、レール、ガイドライン等のような構造要素間で接続される。
【0101】
図12を参照すると、イオンミリング装置40(イオン・スパッタリング・システムとも呼ばれる)は、以下の能力および自由度を有することができる。
a.迅速な塊状除去によるプロセスの増強のみならず、処理後の試料の最高水準の最終品質をもたらす穏便なミリングモードをも可能にする、広範囲のイオンエネルギ制御。
b.短いプロセス持続時間の高いイオン電流密度。
c.試料の均等な処理をもたらすビーム断面に沿ったイオン電流の均一性の制御。
d.試料表面の選択的ミリングを回避する試料表面に対するビームの可変入射角度。
e.多種多様な用途および技術的モードをもたらすビームの形状および大きさの制御。
f.試料処理の均等性のためのビームパルス化。
g.特定領域の試料処理をもたらすビームの正確な位置決め。
h.試料処理の均等性のための直交方向のビーム走査。
i.試料処理の均等性のための関心領域を中心とするユーセントリックビーム回転。
【0102】
イオンミリング装置40は以下を含むことができる。
a.プラズマを着火させるためのデュオプラズマトロンイオン源。
b.プラズマからXe+イオンビームを取り出しかつ捕集するビーム形成モジュール。
c.イオンビームを処理される試料に集束させ、その方向に向かわせる最終光学系。
d.一定の指定圧力の自動ガス配送を提供するXeガス供給システム。
e.プラズマ着火およびイオンビーム形成のために、計測量のガスをイオン源に自動的に供給するリーク弁。
f.イオン・スパッタリング・システムの自動制御をもたらす電子機器および電力供給装置。
【0103】
図12は、イオンビーム源組立体40(1)、非イオン化粒子供給組立体40(2)、イオンビーム引出し組立体40(3)、イオンビーム集束組立体40(4)、イオンビーム偏向部分組立体40(5)、イオンビーム第1偏向組立体40(6)、およびイオンビーム第2偏向組立体40(7)を含むものとしてイオンミリング装置40を示している。
【0104】
イオンビーム源組立体40(1)は非イオン化粒子供給組立体40(2)によって供給され、イオンビーム引出し組立体40(3)は、イオンミリング装置の光軸41に沿って伝搬するイオンビームを出力する。イオンビーム集束組立体40(4)はイオンビームを集束し、かつ集束したイオンビームをイオンビーム第1偏向組立体40(6)に供給する。イオンビーム第1偏向組立体はイオンビームを回転させて、イオンミリング装置の光軸とは相隔たる方向に沿ってイオンビームを向かわせ、偏向回転したイオンビーム41(2)を提供する。イオンビーム第2偏向組立体40(7)は、イオンビーム41(3)の回転を維持しながら、回転イオンビームを光軸の方向に向かわせる。回転はミリング角度を絶えず変化させ、より平滑なミリング済み試料を提供する。
【0105】
イオンミリング装置の非限定例は、「Directed Multi−Deflected Ion Beam Milling of a Work Piece and Determining and Controlling Extent Thereof」と称する米国特許公開出願第2008/0078750750A1号に提供されており、それを参照によって本書に援用する。
【0106】
図13A〜13Dを参照すると、システムはエアロック1300を有する。図13Aは、エアロック1300および本発明の実施形態に係る真空チャンバ91の壁91(1)の略断面図である。
【0107】
図13Bは、本発明の実施形態に係るエアロック1300、真空チャンバ91、およびマニピュレータ100の平面図である。図13Bは、供給ロッドによって支持された試料が真空チャンバ91内に入る前のエアロックを示す。
【0108】
図13Cは、本発明の実施形態に係るエアロック1300、真空チャンバ91、およびマニピュレータ100の断面図である。図13Cは、供給ロッドによって支持された試料が真空チャンバ91内に入る前のエアロックを示す。
【0109】
図13Dは、本発明の実施形態に係るエアロック1300、真空チャンバ91、およびマニピュレータ100の断面図である。図13Dは、供給ロッドによって支持された試料が真空チャンバ91内に配置されるときにエアロックを示す。
【0110】
エアロック1300の機能は、真空チャンバ91を通気することなく、真空チャンバ(図10に91で示す)内に多くの試料、およびマスク、較正プレート、アパーチャ、成膜用ターゲット等のような技術的アクセサリを装填/排出することを可能にすることである。
【0111】
エアロック1300は以下を含む。
a.試料および技術的アクセサリを供給システムに/から(およびマニピュレータを包囲する真空チャンバから/に)装填/排出するための主筐体1330における摺動密閉蓋1320付きの装填口1310。
b.エアロックを追加的に通気することなく、3〜5個の試料およびマスク、較正プレート、アパーチャ、成膜用ターゲット等のような技術的アクセサリを真空チャンバ内に装填することを可能にする供給ロッド1305を含む供給システム。供給ロッドの接合部(ドラム)は、試料または技術的アクセサリを担持する標準シャトルを取り付けるために多くの蟻継ぎを有する。供給ロッド1305は、その軸を中心に回転することができ、手動でまたはモータにより移動させることができる。
c.試料および技術的アクセサリを供給システムに/から装填/排出中に真空チャンバの通気を防止する遮断弁1350。
【0112】
遮断弁1350が開いたときに供給ロッド1305が真空チャンバ91に、特に真空チャンバ91の内部空間91(2)に入ることができるように、エアロック1300は真空チャンバ91の壁91(1)の開口に近接する。供給ロッド1305が真空チャンバに入る前に、エアロック1300および特に装填口(空間)は真空排気される。遮断弁1350が閉じると、気体が真空チャンバ91内に入ることが防止されるように、エアロック1300は密閉される。
【0113】
マニピュレータ100は以下のステージを含むことができ、これらのステージは以下のパラメータによって特徴付けることができる。
【0114】
主回転ステージ130:
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 最小120度
最大速度: 10度/秒
最大加速度: 1000度/秒2
エンコーダ閉ループによる位置決め精度: 150m゜
分解能: 50ミクロン
【0115】
第1サブユニット110:
X軸100(1)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 30mm
最大速度: 5mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
Y軸100(2)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 25mm
最大速度: 10mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
Z軸100(3)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 30mm
最大速度: 5mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
θ軸(軸に貫通穴は無いかもしれない)100(5)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 360度
最大速度: 45度/秒
最大加速度: 1000度/秒2
エンコーダ閉ループによる位置決め精度: 500m°
分解能: 100μ°
【0116】
第2サブユニット120:
X軸100(11)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 30mm
最大速度: 5mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
Y軸(図示せず)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 25mm
最大速度: 10mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
Z軸100(9)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 30mm
最大速度: 5mm/秒
最大加速度: 1000mm/秒2
エンコーダ閉ループによる位置決め精度: 1000nm
分解能: 1nm
R軸100(8)
アクチュエータの型: ピエゾモータ
作動モード: ステッピングおよびスキャンニング
ストローク: 360度
最大速度: 45度/秒
最大加速度: 1000度/秒2
エンコーダ閉ループによる位置決め精度: 250m°
分解能: 150μ°
【0117】
図1および5を参照して、初期試料およびミリングされた試料は以下のパラメータによって特徴付けることができる。
入力試料厚さ 20〜30ミクロン
ミリング後の試料厚さ 10〜50nm
関心領域の厚さの変動 <5nm
標的特徴の周りの薄化領域(関心領域)
厚さ<50nm 10×5μ
厚さ<100nm 30×10μ
厚さ<200nm 100×15μ
関心領域の局在性 5〜10nm
アーチファクトレベル
非晶質化 <1nm
点欠点 <1nm
Xe汚染 <10−9%
【0118】
図14は、本発明の実施形態に係る方法1400を示す。
【0119】
方法1400は、マスクを受け取るかまたは生成するステージ1410から開始される。マスクは、高精度マスクを提供するためにマイクロクリービングによって生成することができる。マイクロクリービングの例は、「Apparatus for cleaving crystals」と称する米国特許6223961に示されており、これを参照によって本書に援用する。
【0120】
ステージ1410の後に、図1に示す通り、数ミクロンの厚さを(その縁部付近で)有する初期試料を受け取るかまたは生成するステージ1420が続く。初期試料は、イスラエル国のCamtek Ltd.のME3ツールによって作製することができる。
【0121】
ステージ1420の後に、マスクおよび初期試料をマニピュレータに提供するステージ1430が続く。
【0122】
ステージ1430の後に、マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび初期試料(図2)のアラインメントを実行するステージ1440が続く。マスクのアライメントは初期試料の片側をイオンミリングに露出させるように行なわれ、アラインメントはマスクおよび/または初期試料をマニピュレータによって移動させることを含む。
【0123】
ステージ1440の後に、マスクおよび初期試料がイオンミリング装置に対面するようにアラインメントを維持しながら、マスクおよび初期試料をマニピュレータによって移動(例えば軸を中心に回転)させるステージ1450が続く。
【0124】
ステージ1450の後に、走査型電子顕微鏡によってミリングを観察しながら、二重偏向によってミリングを実行するイオンミリング装置によって初期試料の縁部領域の露出部分をミリングすることを含む1回目のミリングシーケンス(図3)を実行するステージ1460が続く。該ミリングは初期試料の片側の縁部領域を薄化するものである。1回目のミリングシーケンスは、部分的にミリングされた試料を提供する。図2は、マスクが初期試料の中心から数ナノメートル(D23)離れた位置から始まるゾーンを露出させることを示す。
【0125】
ステージ1460の後に、部分的にミリングされた試料の縁部領域の反対側をイオンミリング装置に対して露出させるために、マスクと部分的にミリングされた試料との間の空間的関係を(マニピュレータによって)変化させるステージ1470が続く。
【0126】
ステージ1470の後に、マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび部分的にミリングされた試料のアラインメントを実行するステージ1475が続く。部分的にミリングされた試料の反対側をイオンミリング装置に露出させるためにマスクはアラインメントされ、アラインメントはマスクおよび/または初期試料をマニピュレータによって移動させることを含むことができる。
【0127】
ステージ1475の後に、走査型電子顕微鏡によって、かつ(任意選択的に、部分的にミリングされた試料が部分的に電子を透過し始めたときに)TEMまたはSTEM検出器によってミリングを観察しながら、部分的にミリングされた試料の縁部領域の他の(今露出されている)部分を、所望の厚さに達するまでイオンミリング装置によってミリングすることを含む2回目のミリングシーケンス(図4)を実行するステージ1480が続く。ミリングプロセスは、ミリングされた試料の厚さが所望の厚さに達したことをTEM検出器33が示したときに、自動的に停止することができる。
【0128】
図15は、本発明の実施形態に係る方法1500を示す。
【0129】
方法1500は、マスクを受け取るかまたは生成するステージ1410から開始される。マスクは、高精度マスクを提供するためにマイクロクリービングによって生成することができる。マイクロクリービングの例は、「Apparatus for cleaving crystals」と称する米国特許6223961に示されており、これを参照によって本書に援用する。
【0130】
ステージ1410の後に、図1に示す通り、数ミクロンの厚さを(その縁部付近で)有する初期試料を受け取るかまたは生成するステージ1420が続く。初期試料は、イスラエル国のCamtek Ltd.のME3ツールによって作製することができる。
【0131】
ステージ1420の後に、マスクおよび初期試料をマニピュレータに提供するステージ1430が続く。
【0132】
ステージ1430の後に、マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび初期試料(図2)のアラインメントを実行するステージ1440が続く。マスクのアライメントは初期試料の片側をイオンミリングに露出させるように行なわれ、アラインメントはマスクおよび/または初期試料をマニピュレータによって移動させることを含む。
【0133】
ステージ1440の後に、マスクおよび初期試料がイオンミリング装置に対面するようにアラインメントを維持しながら、マスクおよび初期試料をマニピュレータによって移動(例えば軸を中心に回転)させるステージ1450が続く。
【0134】
ステージ1450の後に、走査型電子顕微鏡によってミリングを観察しながら、二重偏向によってミリングを実行するイオンミリング装置によって初期試料の縁部領域の露出部分をミリングすることを含む1回目のミリングシーケンス(図3)を実行するステージ1460が続く。該ミリングは初期試料の片側の縁部領域を薄化するものである。1回目のミリングシーケンスは、部分的にミリングされた試料を提供する。図2は、マスクが初期試料の中心から数ナノメートル(D23)離れた位置から始まるゾーンを露出させることを示す。
【0135】
ステージ1460の後に、マスクおよび初期試料が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって移動(例えば軸を中心に回転)させるステージ1510が続く。
【0136】
ステージ1510の後に、マニピュレータならびに走査型電子顕微鏡および光学顕微鏡の少なくとも1つを使用することによって、マスクおよび部分的にミリングされた試料のアラインメントを実行するステージ1520が続く。部分的にミリングされた試料の反対側をイオンミリングに露出させるために、マスクがアラインメントされ、アラインメントはマスクおよび/または初期試料をマニピュレータによって移動させることを含むことができる。
【0137】
ステージ1520の後に、走査型電子顕微鏡によって、かつ(任意選択的に、部分的にミリングされた試料が部分的に電子を透過し始めたときに)TEMまたはSTEM検出器によってミリングを観察しながら、部分的にミリングされた試料の縁部領域の他の(今露出されている)部分を、所望の厚さに達するまでイオンミリング装置によってミリングすることを含む2回目のミリングシーケンス(図4)を実行するステージ1480が続く。ミリングプロセスは、ミリングされた試料の厚さが所望の厚さに達したことをTEM検出器33が示したときに、自動的に停止することができる。ミリングされた試料(または少なくともそのミリングされた縁部)は、SETMまたはTEMによって観察される標的を含むはずである。
【0138】
図14および15は二重ミリングプロセスを示すが、該方法は、マスクと試料との間の空間的関係の変更およびマスクと試料とのアラインメントを先行させて、3つ以上のミリングステージを含むことができることが注目される。
【0139】
上に示した方法の各々の結果は、標的を含みかつTEMまたはSTEM試料となるように電子を透過させる、非常に薄い関心領域である。
【0140】
本発明は、従来のツール、方法論、および構成部品を使用することによって実施することができる。したがってそのようなツール、構成部品、および方法論についてここでは詳細に記載しない。これまでの説明で、本発明の完全な理解をもたらすために多くの明確な詳細を記載している。しかし本発明は、明確に記載した詳細に頼ることなく、実施することができることを認識されたい。
【0141】
本開示では、本発明の例示的実施形態およびその多様性の数例を示しかつ記載しただけである。本発明は、種々の他の組合せおよび環境での使用が可能であり、かつ本書に明記する発明の概念の範囲内で変化または変形が可能であることを理解されたい。
【特許請求の範囲】
【請求項1】
試料を作製するための方法であって、以下のステップを含む方法:
マスクおよび初期試料をマニピュレータによって受け取るステップ;
マスクおよび初期試料の縁部領域の第1側が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置すること;
マスクで初期試料の縁部領域のマスキング部分を遮蔽しながら、初期試料の縁部領域の露出部分を非マスキング状態に維持するように、マスクおよび初期試料のアラインメントをマニピュレータによって実行するステップ、但しアラインメントの実行は、マスクおよび初期試料の画像を撮像装置によって得ることを含む;
マスクと初期試料との間の空間的関係を変化させることなく、マスクおよび初期試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップ;
マスキング部分をマスクによって遮蔽しながら、初期試料の縁部領域の露出部分をイオンミリング装置によってミリングして、部分的にミリングされた試料を提供するステップ;
マスクおよび初期試料の縁部領域の第2側が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置するステップ、但し第2側は第1側とは異なる;
マスクが部分的にミリングされた試料の縁部領域のマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分を非マスキング状態に維持するように、マスクおよび初期試料のアラインメントをマニピュレータによって実行するステップ、但しアラインメントの実行は、マスクおよび部分的にミリングされた試料の画像を撮像装置によって得ることを含む;
マスクと部分的にミリングされた試料との間の空間的関係を変化させることなく、マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置に対面するように、マスクおよび部分的にミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ;および
マスクによってマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングして、ミリングされた試料を提供するステップ。
【請求項2】
マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップは、マスクおよび初期試料をマニピュレータによって回転させることを含む、請求項1に記載の方法。
【請求項3】
部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングするステップは、ミリング中に、撮像装置の透過型検出器によってミリングされた試料の縁部領域の厚さを監視することを含む、請求項1に記載の方法。
【請求項4】
部分的にミリングされた試料の縁部領域のミリング中に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させることを含む、請求項1に記載の方法。
【請求項5】
部分的にミリングされた試料のミリング後に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させることを含む、請求項1に記載の方法。
【請求項6】
撮像装置の光軸はミリング工具の光軸に対し直角を成し;マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップは、マスクおよび初期試料をマニピュレータによって回転させることを含む、請求項1に記載の方法。
【請求項7】
以下のステップを含む、請求項1に記載の方法:
マスクおよび初期試料の縁部領域の第1側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによって配置するステップ;
マスクおよび初期試料の縁部領域の第1側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップ;
マスクおよび初期試料の縁部領域の第2側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置するステップ;および
マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび部分的にミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
【請求項8】
初期試料の縁部領域は少なくとも1ミクロンの厚さを有し、ミリングされた試料の縁部領域の厚さは50ナノメートルを超えない、請求項1に記載の方法。
【請求項9】
ミリングするステップは、イオンミリング装置の光軸を中心にミリングビームを回転させながらミリングすることを含む、請求項1に記載の方法。
【請求項10】
部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によって除去することを含む、請求項1に記載の方法。
【請求項11】
部分的にミリングされた試料の縁部領域の厚さに基づいて、部分的にミリングされた試料の縁部領域のミリングを停止することを含む、請求項1に記載の方法。
【請求項12】
撮像装置の透過型検出器によって部分的にミリングされた試料の縁部領域の厚さを監視することを含む、請求項11に記載の方法。
【請求項13】
撮像装置の透過型検出器へ出力される電流を、電流値と厚さの値との間の予め定められた関係と比較することを含む、請求項11に記載の方法。
【請求項14】
以下のステップをさらに含む、請求項1に記載の方法:
マスクおよびミリングされた試料の縁部領域の第1側が撮像装置に対面するように、マスクおよびミリングされた試料をマニピュレータによって撮像装置の前に配置するステップ;
ミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクがミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよびミリングされた試料のアラインメントをマニピュレータによって実行するステップ、但しアラインメントの実行は、撮像装置によってマスクおよびミリングされた試料の画像を得ることを含む;
マスクとミリングされた試料との間の空間的関係を変化させることなく、マスクおよびミリングされた試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよびミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ;および
マスキング部分をマスクによって遮蔽しながら、ミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングして、さらにミリングされた試料を提供するステップ。
【請求項15】
撮像装置は、光学装置である、請求項1に記載の方法。
【請求項16】
撮像装置は、走査型電子顕微鏡である、請求項1に記載の方法。
【請求項17】
後方散乱電子検出器によって初期試料のミリングの進捗を監視するステップと、部分的にミリングされた試料のミリングの完了を透過型検出器によって監視するステップとを含む、請求項1に記載の方法。
【請求項18】
部分的にミリングされた試料の縁部領域が所望の厚さに達したときに、部分的にミリングされた試料のミリングを自動的に停止することを含む、請求項1に記載の方法。
【請求項19】
マニピュレータ;撮像装置;およびイオンミリング装置を含む試料作製システムであって;
マニピュレータは、次のように構成される:
マスクおよび初期試料を受け取る;
マスクおよび初期試料の縁部領域の第1側が撮像装置に対面するように、マスクおよび初期試料を撮像装置の前に配置する;
初期試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクが初期試料の縁部領域のマスキング部分を遮蔽するように、マスクおよび初期試料のアラインメントに関与する;
マスクと初期試料との間の空間的関係を変化させることなく、マスクおよび初期試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよび初期試料をイオンミリング装置の前に配置する;
イオンミリング装置は、マスキング部分をマスクによって遮蔽しながら、初期試料の縁部領域の露出部分をミリングして、部分的にミリングされた試料を提供するように構成される;
マニピュレータはさらに、次のように構成される:
マスクおよび初期試料の縁部領域の第2側が撮像装置と対面するようにマスクおよび初期試料を撮像装置の前に配置する、但し第2側は第1側とは異なる;
部分的にミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクが部分的にミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよび部分的にミリングされた試料のアラインメントに関与する;
マスクと部分的にミリングされた試料との間の空間的関係を変化させることなく、マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置に対面するように、マスクおよび部分的にミリングされた試料をイオンミリング装置の前に配置する;
イオンミリング装置はさらに、マスクによってマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分をミリングして、ミリングされた試料を提供するように適応される;および
撮像装置は次のように構成される:
マスクおよび初期試料のアラインメント中に、マスクおよび初期試料の画像を得る;および
マスクおよび部分的にミリングされた試料のアラインメント中に、マスクおよび部分的にミリングされた試料の画像を得る。
【請求項20】
マニピュレータは、マスクおよび初期試料がイオンミリング装置と対面するまで、マスクおよび初期試料を回転させるように構成される、請求項19に記載のシステム。
【請求項21】
撮像システムは、部分的にミリングされた試料の縁部領域の露出部分のミリング中に、部分的にミリングされた試料の縁部領域の露出部分の厚さを示す検出信号を提供するように構成された透過型検出器を含む、請求項19に記載のシステム。
【請求項22】
マニピュレータは、部分的にミリングされた試料の縁部領域のミリング中に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させるように構成される、請求項19に記載のシステム。
【請求項23】
マニピュレータは、部分的にミリングされた試料のミリング後に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させるように構成される、請求項19に記載のシステム。
【請求項24】
撮像装置の光軸はミリング工具の光軸に対し直角を成し、マニピュレータは、マスクおよび初期試料がイオンミリング装置に対面するまで、マスクおよび初期試料を回転させるように構成される、請求項19に記載のシステム。
【請求項25】
マニピュレータは次のように構成される、請求項19に記載のシステム:
マスクおよび初期試料の縁部領域の第1側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料を配置する;
マスクおよび初期試料の縁部領域の第1側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび初期試料をイオンミリング装置の前に配置する;
マスクおよび初期試料の縁部領域の第2側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料を撮像装置の前に配置する;および
マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび部分的にミリングされた試料をイオンミリング装置の前に配置する。
【請求項26】
初期試料の縁部領域は、少なくとも1ミクロンの厚さを有し、システムは、ミリングされた試料の縁部領域が50ナノメートルを超えない厚さになるまで、ミリングされた試料の縁部領域をミリングするように構成される、請求項19に記載のシステム。
【請求項27】
イオンミリング装置は、イオンミリング装置の光軸を中心にミリングビームを回転させながら、ミリングを行なうように構成される、請求項19に記載のシステム。
【請求項28】
イオンミリング装置は、部分的にミリングされた試料の縁部領域の露出部分を除去するように構成される、請求項19に記載のシステム。
【請求項29】
部分的にミリングされた試料の縁部領域の厚さに基づいて、部分的にミリングされた試料の縁部領域のミリングを停止するように構成されるコントローラを含む、請求項19に記載のシステム。
【請求項30】
部分的にミリングされた試料の縁部領域の厚さの監視を支援するように構成される透過型検出器を含む、請求項29に記載のシステム。
【請求項31】
撮像装置の透過型検出器によって出力された電流を、電流値と厚さの値との間の予め定められた関係と比較するように構成されるコントローラを含む、請求項29に記載のシステム。
【請求項32】
マニピュレータはさらに次のように構成される、請求項19に記載のシステム:
マスクおよびミリングされた試料の縁部領域の第1側が撮像装置に対面するように、マスクおよびミリングされた試料を撮像装置の前に配置する;
ミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクがミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよびミリングされた試料のアラインメントに関与する;
マスクとミリングされた試料との間の空間的関係を変化させることなく、マスクおよびミリングされた試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよびミリングされた試料をイオンミリング装置の前に配置する;および
イオンミリング装置はさらに、マスキング部分がマスクによって遮蔽されている間に、ミリングされた試料の縁部領域の露出部分をミリングして、さらにミリングされた試料を提供するように構成される。
【請求項33】
撮像装置は、光学装置である、請求項19に記載のシステム。
【請求項34】
撮像装置は、走査型電子顕微鏡である、請求項19に記載のシステム。
【請求項35】
初期試料のミリングの進捗の監視に関与するように構成された後方散乱電子検出器と、部分的にミリングされた試料のミリングの完了の監視を支援するように構成された透過型検出器とを含む、請求項19に記載のシステム。
【請求項36】
部分的にミリングされた試料の縁部領域が所望の厚さに達したときに、部分的にミリングされた試料のミリングを自動的に停止するように構成されるコントローラを含む、請求項19に記載のシステム。
【請求項37】
イオンミリング装置は、撮像装置とは異なる、請求項19に記載のシステム。
【請求項38】
イオンミリング装置は、撮像装置である、請求項19に記載のシステム。
【請求項1】
試料を作製するための方法であって、以下のステップを含む方法:
マスクおよび初期試料をマニピュレータによって受け取るステップ;
マスクおよび初期試料の縁部領域の第1側が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置すること;
マスクで初期試料の縁部領域のマスキング部分を遮蔽しながら、初期試料の縁部領域の露出部分を非マスキング状態に維持するように、マスクおよび初期試料のアラインメントをマニピュレータによって実行するステップ、但しアラインメントの実行は、マスクおよび初期試料の画像を撮像装置によって得ることを含む;
マスクと初期試料との間の空間的関係を変化させることなく、マスクおよび初期試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップ;
マスキング部分をマスクによって遮蔽しながら、初期試料の縁部領域の露出部分をイオンミリング装置によってミリングして、部分的にミリングされた試料を提供するステップ;
マスクおよび初期試料の縁部領域の第2側が撮像装置に対面するように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置するステップ、但し第2側は第1側とは異なる;
マスクが部分的にミリングされた試料の縁部領域のマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分を非マスキング状態に維持するように、マスクおよび初期試料のアラインメントをマニピュレータによって実行するステップ、但しアラインメントの実行は、マスクおよび部分的にミリングされた試料の画像を撮像装置によって得ることを含む;
マスクと部分的にミリングされた試料との間の空間的関係を変化させることなく、マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置に対面するように、マスクおよび部分的にミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ;および
マスクによってマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングして、ミリングされた試料を提供するステップ。
【請求項2】
マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップは、マスクおよび初期試料をマニピュレータによって回転させることを含む、請求項1に記載の方法。
【請求項3】
部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングするステップは、ミリング中に、撮像装置の透過型検出器によってミリングされた試料の縁部領域の厚さを監視することを含む、請求項1に記載の方法。
【請求項4】
部分的にミリングされた試料の縁部領域のミリング中に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させることを含む、請求項1に記載の方法。
【請求項5】
部分的にミリングされた試料のミリング後に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させることを含む、請求項1に記載の方法。
【請求項6】
撮像装置の光軸はミリング工具の光軸に対し直角を成し;マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップは、マスクおよび初期試料をマニピュレータによって回転させることを含む、請求項1に記載の方法。
【請求項7】
以下のステップを含む、請求項1に記載の方法:
マスクおよび初期試料の縁部領域の第1側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによって配置するステップ;
マスクおよび初期試料の縁部領域の第1側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによってイオンミリング装置の前に配置するステップ;
マスクおよび初期試料の縁部領域の第2側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料をマニピュレータによって撮像装置の前に配置するステップ;および
マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび部分的にミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ。
【請求項8】
初期試料の縁部領域は少なくとも1ミクロンの厚さを有し、ミリングされた試料の縁部領域の厚さは50ナノメートルを超えない、請求項1に記載の方法。
【請求項9】
ミリングするステップは、イオンミリング装置の光軸を中心にミリングビームを回転させながらミリングすることを含む、請求項1に記載の方法。
【請求項10】
部分的にミリングされた試料の縁部領域の露出部分をイオンミリング装置によって除去することを含む、請求項1に記載の方法。
【請求項11】
部分的にミリングされた試料の縁部領域の厚さに基づいて、部分的にミリングされた試料の縁部領域のミリングを停止することを含む、請求項1に記載の方法。
【請求項12】
撮像装置の透過型検出器によって部分的にミリングされた試料の縁部領域の厚さを監視することを含む、請求項11に記載の方法。
【請求項13】
撮像装置の透過型検出器へ出力される電流を、電流値と厚さの値との間の予め定められた関係と比較することを含む、請求項11に記載の方法。
【請求項14】
以下のステップをさらに含む、請求項1に記載の方法:
マスクおよびミリングされた試料の縁部領域の第1側が撮像装置に対面するように、マスクおよびミリングされた試料をマニピュレータによって撮像装置の前に配置するステップ;
ミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクがミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよびミリングされた試料のアラインメントをマニピュレータによって実行するステップ、但しアラインメントの実行は、撮像装置によってマスクおよびミリングされた試料の画像を得ることを含む;
マスクとミリングされた試料との間の空間的関係を変化させることなく、マスクおよびミリングされた試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよびミリングされた試料をマニピュレータによってイオンミリング装置の前に配置するステップ;および
マスキング部分をマスクによって遮蔽しながら、ミリングされた試料の縁部領域の露出部分をイオンミリング装置によってミリングして、さらにミリングされた試料を提供するステップ。
【請求項15】
撮像装置は、光学装置である、請求項1に記載の方法。
【請求項16】
撮像装置は、走査型電子顕微鏡である、請求項1に記載の方法。
【請求項17】
後方散乱電子検出器によって初期試料のミリングの進捗を監視するステップと、部分的にミリングされた試料のミリングの完了を透過型検出器によって監視するステップとを含む、請求項1に記載の方法。
【請求項18】
部分的にミリングされた試料の縁部領域が所望の厚さに達したときに、部分的にミリングされた試料のミリングを自動的に停止することを含む、請求項1に記載の方法。
【請求項19】
マニピュレータ;撮像装置;およびイオンミリング装置を含む試料作製システムであって;
マニピュレータは、次のように構成される:
マスクおよび初期試料を受け取る;
マスクおよび初期試料の縁部領域の第1側が撮像装置に対面するように、マスクおよび初期試料を撮像装置の前に配置する;
初期試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクが初期試料の縁部領域のマスキング部分を遮蔽するように、マスクおよび初期試料のアラインメントに関与する;
マスクと初期試料との間の空間的関係を変化させることなく、マスクおよび初期試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよび初期試料をイオンミリング装置の前に配置する;
イオンミリング装置は、マスキング部分をマスクによって遮蔽しながら、初期試料の縁部領域の露出部分をミリングして、部分的にミリングされた試料を提供するように構成される;
マニピュレータはさらに、次のように構成される:
マスクおよび初期試料の縁部領域の第2側が撮像装置と対面するようにマスクおよび初期試料を撮像装置の前に配置する、但し第2側は第1側とは異なる;
部分的にミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクが部分的にミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよび部分的にミリングされた試料のアラインメントに関与する;
マスクと部分的にミリングされた試料との間の空間的関係を変化させることなく、マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置に対面するように、マスクおよび部分的にミリングされた試料をイオンミリング装置の前に配置する;
イオンミリング装置はさらに、マスクによってマスキング部分を遮蔽しながら、部分的にミリングされた試料の縁部領域の露出部分をミリングして、ミリングされた試料を提供するように適応される;および
撮像装置は次のように構成される:
マスクおよび初期試料のアラインメント中に、マスクおよび初期試料の画像を得る;および
マスクおよび部分的にミリングされた試料のアラインメント中に、マスクおよび部分的にミリングされた試料の画像を得る。
【請求項20】
マニピュレータは、マスクおよび初期試料がイオンミリング装置と対面するまで、マスクおよび初期試料を回転させるように構成される、請求項19に記載のシステム。
【請求項21】
撮像システムは、部分的にミリングされた試料の縁部領域の露出部分のミリング中に、部分的にミリングされた試料の縁部領域の露出部分の厚さを示す検出信号を提供するように構成された透過型検出器を含む、請求項19に記載のシステム。
【請求項22】
マニピュレータは、部分的にミリングされた試料の縁部領域のミリング中に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させるように構成される、請求項19に記載のシステム。
【請求項23】
マニピュレータは、部分的にミリングされた試料のミリング後に得られた厚さフィードバック情報に基づいて、マスクと部分的にミリングされた試料との間の空間的関係を変化させるように構成される、請求項19に記載のシステム。
【請求項24】
撮像装置の光軸はミリング工具の光軸に対し直角を成し、マニピュレータは、マスクおよび初期試料がイオンミリング装置に対面するまで、マスクおよび初期試料を回転させるように構成される、請求項19に記載のシステム。
【請求項25】
マニピュレータは次のように構成される、請求項19に記載のシステム:
マスクおよび初期試料の縁部領域の第1側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料を配置する;
マスクおよび初期試料の縁部領域の第1側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび初期試料をイオンミリング装置の前に配置する;
マスクおよび初期試料の縁部領域の第2側が撮像装置の光軸に対し直角を成すように、マスクおよび初期試料を撮像装置の前に配置する;および
マスクおよび部分的にミリングされた試料の縁部領域の第2側がイオンミリング装置の光軸に対し直角を成すように、マスクおよび部分的にミリングされた試料をイオンミリング装置の前に配置する。
【請求項26】
初期試料の縁部領域は、少なくとも1ミクロンの厚さを有し、システムは、ミリングされた試料の縁部領域が50ナノメートルを超えない厚さになるまで、ミリングされた試料の縁部領域をミリングするように構成される、請求項19に記載のシステム。
【請求項27】
イオンミリング装置は、イオンミリング装置の光軸を中心にミリングビームを回転させながら、ミリングを行なうように構成される、請求項19に記載のシステム。
【請求項28】
イオンミリング装置は、部分的にミリングされた試料の縁部領域の露出部分を除去するように構成される、請求項19に記載のシステム。
【請求項29】
部分的にミリングされた試料の縁部領域の厚さに基づいて、部分的にミリングされた試料の縁部領域のミリングを停止するように構成されるコントローラを含む、請求項19に記載のシステム。
【請求項30】
部分的にミリングされた試料の縁部領域の厚さの監視を支援するように構成される透過型検出器を含む、請求項29に記載のシステム。
【請求項31】
撮像装置の透過型検出器によって出力された電流を、電流値と厚さの値との間の予め定められた関係と比較するように構成されるコントローラを含む、請求項29に記載のシステム。
【請求項32】
マニピュレータはさらに次のように構成される、請求項19に記載のシステム:
マスクおよびミリングされた試料の縁部領域の第1側が撮像装置に対面するように、マスクおよびミリングされた試料を撮像装置の前に配置する;
ミリングされた試料の縁部領域の露出部分を非マスキング状態に維持しながら、マスクがミリングされた試料の縁部領域のマスキング部分を遮蔽するように、マスクおよびミリングされた試料のアラインメントに関与する;
マスクとミリングされた試料との間の空間的関係を変化させることなく、マスクおよびミリングされた試料の縁部領域の第1側がイオンミリング装置に対面するように、マスクおよびミリングされた試料をイオンミリング装置の前に配置する;および
イオンミリング装置はさらに、マスキング部分がマスクによって遮蔽されている間に、ミリングされた試料の縁部領域の露出部分をミリングして、さらにミリングされた試料を提供するように構成される。
【請求項33】
撮像装置は、光学装置である、請求項19に記載のシステム。
【請求項34】
撮像装置は、走査型電子顕微鏡である、請求項19に記載のシステム。
【請求項35】
初期試料のミリングの進捗の監視に関与するように構成された後方散乱電子検出器と、部分的にミリングされた試料のミリングの完了の監視を支援するように構成された透過型検出器とを含む、請求項19に記載のシステム。
【請求項36】
部分的にミリングされた試料の縁部領域が所望の厚さに達したときに、部分的にミリングされた試料のミリングを自動的に停止するように構成されるコントローラを含む、請求項19に記載のシステム。
【請求項37】
イオンミリング装置は、撮像装置とは異なる、請求項19に記載のシステム。
【請求項38】
イオンミリング装置は、撮像装置である、請求項19に記載のシステム。
【図2】


【図3】
【図4】
【図5】
【図11A】
【図11B】
【図11C】
【図11D】
【図12】
【図13B】
【図14】
【図15】
【図1】
【図6】
【図7】
【図8】
【図9】
【図10】
【図13A】
【図13C】
【図13D】
【図3】
【図4】
【図5】
【図11A】
【図11B】
【図11C】
【図11D】
【図12】
【図13B】
【図14】
【図15】
【図1】
【図6】
【図7】
【図8】
【図9】
【図10】
【図13A】
【図13C】
【図13D】
【公開番号】特開2012−18163(P2012−18163A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−149676(P2011−149676)
【出願日】平成23年7月6日(2011.7.6)
【出願人】(511164282)カムテック リミテッド (2)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2011−149676(P2011−149676)
【出願日】平成23年7月6日(2011.7.6)
【出願人】(511164282)カムテック リミテッド (2)
【Fターム(参考)】
[ Back to top ]