
試料を形成して被分析面から吸引する方法及びそのためのシステム
試料を形成して分析対象の表面(22)から吸引するための方法およびシステム(20)では、ポート(37)を備える採集器具(24)を利用し、そのポートを通じて分析対象の表面上に溶液が誘導される。ポートは分析対象の表面に近接させて位置決めされ、そして溶液がポートを通じて表面上に誘導されて、これにより、表面上に誘導された溶液が、表面を構成する物質と相互作用するようになる。その後、一分量の物質(52)が表面から吸引される。圧力制御を利用して、表面における溶液平衡を操作することができ、これにより、上記一分量の物質の表面からの吸引が制御される。また、そのような圧力制御を、XY平面内での採集器具のポートに対する表面の相対移動に連携させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、米国エネルギー省とUT‐Battelle,LLCとの間の契約番号DE‐AC05‐00OR22725に基づき、政府の支援の下でなされたものであり、政府は、本発明に一定の権利を有する。
【0002】
本発明は、広くは、サンプリング手段及び方法に関し、より具体的には、一分量の試料を形成して所望の被分析面から吸引するための手段及び方法に関するものである。
【背景技術】
【0003】
本発明の比較対象となる試料採集技術は、分析のため、表面の一分量、より具体的にはその表面の物質を採集する目的で、その被分析面即ちサンプリングされる表面に器具を比較的近接させて位置決めすることに関わるものである。試料採集のために用いられるそのような器具の一例は、サンプリング・プローブの形態のものであり、これは、同心状に配された外管と内管のペアを有して、これにより、プローブの先端(即ち、ポートがある端部)で開口する同心状配置の外側と内側の流通路を提供する。このようなプローブでサンプリング・プロセスが実行されるときには、その先端が、サンプリングされる試料の表面に近接して配置され、溶出液(例えば、試料を溶解する溶媒)が外側の通路を通じて試料の表面に誘導される。溶出溶媒が試料の表面に誘導されたら、サンプリング目的で、その表面から一分量の試料がプローブ先端を通って内側流通路に引き込まれる。
【0004】
上記の類の採集器具の例は、本出願と共通の発明者による特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6803566号
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の目的は、サンプリングされる表面で(試料を豊富に含む一分量の溶液で構成される)試料を形成して、形成された試料をその表面から吸引する、新しく改良された方法及び関連するシステムを提供することである。
【0007】
本発明の別の目的は、一分量の試料をサンプリング目的で抽出する前に、予め選択された期間、試料を溶液にさらすことに適応できる方法を提供することである。
【0008】
本発明のさらに別の目的は、試料の表面のさまざまな位置から試料をサンプリング目的で抽出するのに特に適した方法を提供することである。
【0009】
本発明のさらなる目的は、溶液をある範囲内にとどめるような形状をしていない表面から試料を抽出するのに適した方法を提供することである。
【0010】
本発明のさらなる目的は、その実施が煩雑ではなく、しかもその作用は効果的であるような方法を提供することである。
【課題を解決するための手段】
【0011】
本発明は、被分析面で試料を形成して、形成された試料を被分析面から吸引するための方法及びシステムに属するものである。
【0012】
当該方法は、ポートを備える器具であって、そのポートを通じて溶液が分析対象の表面上に誘導される器具を提供するステップと、器具のポートを分析対象の表面に近接させて位置決めするステップとを含んでいる。そして、溶液が、器具のポートを通じて表面上に誘導されて、これにより表面上に誘導された溶液が、表面を構成する物質と相互作用するようになる。その後、一分量の物質が表面から吸引される。
【0013】
表面サンプリングシステムは、ポートを備える器具であって、そのポートを通じて溶液が分析対象の表面上に誘導され、そのポートを通じて一分量の試料が表面から吸引される器具を有し、さらに、器具のポートを分析対象の表面に近接させて位置決めする手段を有している。加えて、当該システムは、器具のポートを通じて表面上に溶液を誘導する手段であって、これにより、表面上に誘導された溶液を、表面を構成する物質と相互作用させる手段を有し、さらに、器具のポートを通じて表面から一分量の物質を吸引する手段を有している。
【図面の簡単な説明】
【0014】
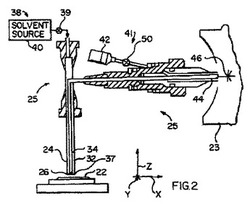
【図1】図1は、本発明の特徴を取り入れたシステムの一例の概略図である。
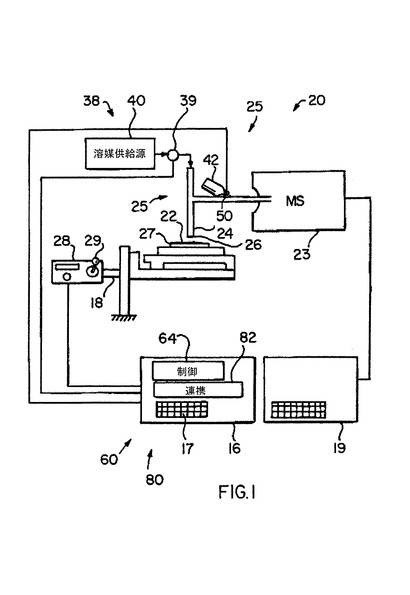
【図2】図2は、図1のシステムの、試料採集のための構成部を含む選択された構成要素の縦断面図である。
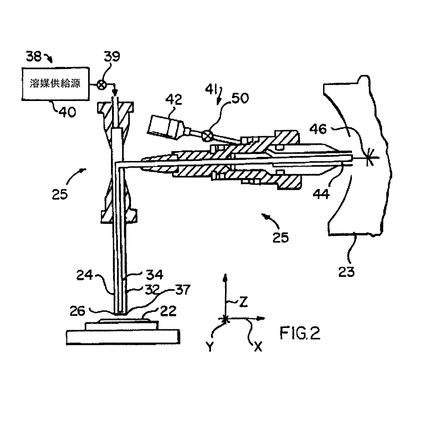
【図3】図3は、図1のシステムで用いられる採集器具の先端部を拡大して示す縦断面図である。
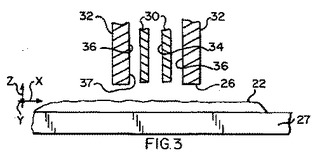
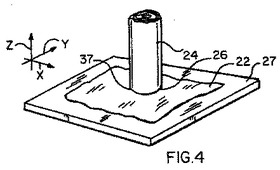
【図4】図4は、図3に示す採集器具の先端部の斜視図、及び、試料の採集が所望されている表面の概観である。
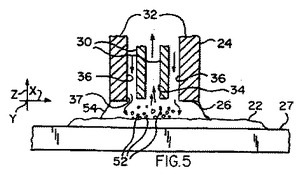
【図5】図5は、図3に類似した図であって、採集器具と、試料の採集が所望されている表面との境界面におけるジャンクションの形成を示している。
【図6】図6a〜6hは、図3〜4の採集器具の一方の側から撮影されたキャプチャ画像であって、液体ジャンクションが生じ、それに続いて、その形成されたジャンクションが採集器具により表面から吸引されるところを順に示している。
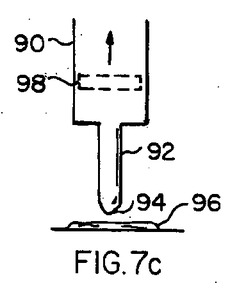
【図7】図7a〜7cは、ピペットを用いて本発明の方法を実行する手順を概略的に示す側面立面図である。
【発明を実施するための形態】
【0015】
以下、実施形態の一例と関連させて、本発明について説明する。それは、図1においてその全体を20で表して概略的に示す、エレクトロスプレー(ESI)システムの実施形態であって、これを用いて本発明の方法の手順を実行することが可能である。また、この実施形態は、後に続く分析に向けて、(サンプリングされる表面を具現化している)表面22の少なくとも1つのスポット又は領域から試料を取得する目的のため、本発明の特徴をその中で具現化しているものである。簡単に言えば、本発明の方法は、ピペットやシリンジなど、溶液を表面22に誘導することで、表面22を構成する物質と溶液を相互作用させ、その後、一分量の物質を表面22から試料として吸引するために用いることができる幾つかの適した器具のうち、いずれを用いて実行することもできる。従って、当然のことながら、本明細書で提示及び説明される図示のシステム20は、それによって本発明の方法を実行することができるシステムの一例である。
【0016】
サンプリングされる表面22は、例えば、その試料を質量分析計23で分析することが所望される配列とすることができるが、このシステム20は、対象となるあるいろいろな表面のうち任意のものをサンプリングするために用いることができ、TLCプレート、親和性配列、及び組織切片の読み出しに特に有用であると考えられる。このように、本発明の原理は様々に応用することができる。
【0017】
出願人は、いくつかの例で、表面サンプリングから後に続く質量分光(MS)分析に向けたインタフェースとして、複合型液体ジャンクション表面サンプリング・プローブ(LMJ‐SSP)の利用を実際に示してきた。この装置は、表面から物質をサンプリングするために、表面サンプリング・プローブと表面との液体マイクロジャンクション、及び、自己吸引型エレクトロスプレーイオン化(ESI)又は大気圧化学イオン化(APCI)エミッタを利用する。これらLMJ‐SSP/ESI及びLMJ‐SSP/APCIカップリングの分析的有用性を、市販の逆相(RP)C8及びC18薄層クロマトグラフィー(TLC)プレート、親和性配列、及び組織切片において分離された様々な被分析物の定性分析及び定量分析により実証した。液体ジャンクションの幅は、以前のこういった例では、20〜60μmの範囲内であった。サンプリング・プローブと表面との液体ジャンクション(幅20〜60μm)の形成は、後に画像解析を用いて自動化された。しかしながら、この自動化された方法は、液体ジャンクションを形成するのにおよそ15〜30秒を要し、このことが、高スループットの表面サンプリングシステムにおいてLMJ‐SSPが実用的インタフェースと見なされることを阻んでいる。本明細書で説明するように、出願人は、高スループット・サンプリングという目的により良く適合すると考えられる、SSP器具を用いた試料採集の方法論を開発した。
【0018】
図1〜3を参照して、図示のシステム20は、その全体を25で示す試料採集のための構成部を有し、これは表面サンプリング・プローブ24の形態の採集器具を含み、この器具の終端の(ポート37を提供する)先端部26は、表面22から試料を採集するために表面22に近接させて位置決めすることが可能である。図示のシステム22のサンプリング・プローブ24は、同心状に配された内管32と外管30とを有して(図2及び図3)、これにより、内側流通路34及び外側流通路36をそれぞれ提供するものであるが、当然のことながら、本発明の方法の手順を実行するのに適した器具は、別の形態を取るものとすることもできる。
【0019】
試料採集のための構成部25は、さらに、その全体を図2において38で示す手段を含んでおり、これは、溶出溶媒といった液状の試料溶解剤又は溶液を、サンプリングされる表面22に堆積させる目的で、プローブ24の外側流通路36に誘導するためのものである。このため、溶剤誘導手段38は、液状剤の供給源40を含み、また、外側流通路36に流体連結されていて、これにより、外側流通路36に送り込まれた液状溶解剤は、プローブ先端部26から滲出することにより流出して、大気圧環境において表面22に堆積されることが可能である。外側流通路36への溶液の流入は、供給源40から外側流通路36への溶液の流れに沿って接続されたポンプ(図示せず)、あるいは駆動可能なレギュレータ又はバルブ39により制御することができる。
【0020】
試料採集のための構成部25は、さらに、その全体を図2において41で示す手段を含んでおり、これは、霧化ガス流をプローブ24に対してその内部の圧力を変化させるようにして送達するためのものである。このような供給手段41は、霧化ガスの供給源42を含んでおり、圧力の下、霧化ガスは44で示すプローブ24の遠位端部(即ち、先端部26と反対側のプローブ端部)を通り過ぎる経路をたどる。霧化ガス流が十分に高い流速でプローブ24の端部44を通り過ぎるようにすることで、プローブ先端部26に隣接して位置する一分量の試料が、(プローブ24の端部44と先端部26との間に生じる圧力差によって)表面22から吸引され、そして、採集された試料はその分析のため、スプレー46状の霧化ガスにより質量分析計23に向かって運ばれる。供給源42からの霧化ガスの流れに沿って接続された駆動可能なレギュレータ又はバルブ50によって、供給源42からの霧化ガスの流れを制御することができる。
【0021】
システム20の作動中には、プローブ先端部26が、表面22上のある場所に近接して位置決めされ、そして、一分量の溶液又は液状剤が供給源40からプローブ24の外側流通路36を通って流れるようにされて、これにより、溶液はプローブ先端部26から外へ誘導されて表面22上に堆積し、そこで溶液は表面22を構成する物質と相互作用することが可能である。表面22から一分量の物質を採集するのが望ましいときに、霧化ガスの流量がプローブ24の遠位端部44を越えるようにされて、これにより、一分量の試料が、堆積した溶液と共に表面22から引き上げられて、内側流通路32を通り、スプレー46状にされて、プローブ24の遠位端部44から外に運ばれる(図2)。
【0022】
図3及び4を参照すると、分析のため、一分量の試料の採集が所望される表面22の例が示されている。図示の表面22内において、試料は図示されたXY座標平面に広がって全体としてその平面内に配置されている。サンプリングされる表面22に渡って、任意のXY座標位置、スポット、又は場所からの試料の採集を可能とするため、プローブ24はその先端部26と共に、サンプリングされる表面22に関して固定の静止状態で支持される。一方、その表面22は、支持板27の上に支持されており、図示されたXY座標軸に沿って、即ち支持板27の平面内において、さらには図示されたZ座標軸に沿ってプローブ先端部26に近づいたり離れたりするようにして、プローブ先端部26に対して相対移動するようになっている。図示のシステムの支持板27は、例えば、薄層クロマトグラフィー(TLC)プレートの形態をとるものとすることができ、その上には分析が所望される物質の一分量が配置される。本明細書における考察においては、サンプリングされる表面22は、支持板27によりXY平面内に支持されていることになり、Z軸はXY平面に垂直である。
【0023】
図1を再び参照して、その支持板27は、XYZステージ28(図1)の可動支持アーム18の上に支持されるようにして取り付けられており、これによって、支持板27とそこに支持されている表面22は、図示されたX、Y、及びZ座標の方向に沿って移動する。XYZステージ28は、ジョイスティック操作ユニット29に適切に配線接続されており、そしてこのユニットは、第1の制御コンピュータ16に接続されている。第1の制御コンピュータは、ジョイスティック操作ユニットからコマンド信号を受け取るものであって、これにより、サンプリング・プロセスがシステム20で実行される際に採集管の先端部26の下で表面22がXY平面内で移動して、表面22に沿って或いは表面22上の任意の所望のレーン(即ち1つのX又はY座標パス)に沿って、任意の所望の場所(即ち任意の所望のXY座標位置)から試料を取得することができる。
【0024】
例えば、図3及び4においては、表面22から試料を採集するため、表面22上方の試料採集位置に配置されたプローブ24の概観を示している。表面22上の別のXY座標位置に近接した試料採集位置、即ちそのXY座標位置上方の試料採集位置にプローブ先端部26を再配置するため、プローブ先端部26の下方で、表面22には適切にインデックスが付けられており、これによって、プローブ先端部26は、そこからの一分量の試料の採集が望まれている所望の表面位置に近接させて再配置される。掃引速度、及び試料採集時にプローブ24が位置決めされる、表面22に合わせた試料採集レジストリにおける望ましいXY位置の識別情報など、表面22とプローブ先端部26の相対移動の特性は、例えば、コンピュータ・キーボード17によってコンピュータ16に入力することができ、あるいは、コンピュータ16のメモリ内に予めプログラムしておくことができる。
【0025】
XYZステージ28の内部コンポーネントについての説明は必要ないと考えられるが、あえて言うならば、プローブ先端部26に対する支持面27(及び表面22)のX及びY座標の位置は、例えば、XYZステージ28の内部に取り付けられた可逆サーボモータ(図示せず)のペアを適切に駆動することにより制御され、一方、プローブ先端部26に対する支持面27(及び表面22)のZ座標の位置は、例えば、XYZステージ28の内部に取り付けられた可逆ステッピングモータ(図示せず)を適切に駆動することにより制御される。従って、X及びY座標のサーボモータへの通電を適切に行なうことにより、プローブ24の先端部26が表面22のXY座標平面内の任意のXY座標位置に合わせた試料採集レジストリに位置決めされるように、表面22を位置付けることができ、また、Z軸のステッピングモータへの通電を適切に行なうことにより、表面22を、プローブ先端部26に近づけるように、あるいは離れるように動かすことができる。
【0026】
図1を再び参照して、図示のシステム20は、さらに、質量分析計23を有しており、これは、試料採集のための構成部25(図2)に隣接して配置されて、分析目的でそこに送られる、試料を含むスプレー46を受け取るものである。この質量分析計23には、第2の制御コンピュータ19が関連付けられており、これによって、質量分析計23の動作及び機能を制御する。図示のシステム20で質量分析計23として用いるのに適した質量分析計の例は、カナダのオンタリオ州コンコードのMDS SCIEX社から4000 Qtrapという商品名で入手可能なものである。図示のシステム20では、(質量分析計23を含む)システム・コンポーネントの様々な動作を制御するために、2つの個別のコンピュータ16及び19を用いているが、このシステム20内で実行されるすべての動作を、本発明の利益のために、1つのコンピュータで制御することが可能であり、あるいは代替案として、質量分析計のソフトウェアパッケージ内に取り込まれた適当なソフトウェア・コンポーネントにより制御することができる。この後者の例では、1つのソフトウェアパッケージにより、XYZステージの動作と質量分析計による検出を制御することもできる。
【0027】
システム20により試料採集操作が実行される際には、表面22の所望のXY座標位置から試料を採集するため、表面22とプローブ24が、必要に応じて、X及びY座標方向に沿って互いに相対移動させられて、これにより、プローブ先端部26が、表面22の所望のXY座標位置となるように、表面22に合わせた試料採集レジストリ(即ち静止位置)に位置決めされる。このために、適当なコマンド信号が、コンピュータ16から、XYZステージ28に付随するモータに送信されて、これにより、プローブ先端部26が、表面22の所望のXY座標位置に合わせた試料採集レジストリに位置決めされる。そして、駆動可能なバルブ39が開かれることで、溶液が外側流通路36を流れるようになって、プローブ先端部26を通って表面22上に至り、これによって、表面22が液状剤にさらされる。さらに、駆動可能なバルブ50も開かれることで、霧化ガスが、バルブ50を通ってプローブ26の遠位端部44を通り過ぎるという順序で流れ、これによって、その場所での圧力が下がる。プローブ24の遠位端部44と先端部26との間に生じる圧力差によって、表面22からの一分量の試料(例えば、図5において52で示す物質)が、供給源40から送られた分量の溶液と共に、分析のために質量分析計23へ運ばれる。
【0028】
図示のシステム20は、その特徴の1つとして、その全体を図1において60で示す手段を有しており、これは、バルブ50を通じた霧化ガスの流れを制御するためのものである。これによって、表面22に送られた溶液による試料の形成と、それに続くプローブ24を用いた表面22からの試料(即ち、図5に54で示す、試料を豊富に含むジャンクションの形態のもの)の吸引が、制御される。図示のシステム20では、制御手段60は、先に紹介した、プローブ24の遠位端部44を越えて誘導される霧化ガスの流れに沿って接続されたバルブ50を含んでおり、さらに、制御回路64を含んでいて、これは例えばコンピュータ16内に実装されて、バルブ50に接続されており、これによって、バルブ50を通じて移動する霧化ガスの流量が要求に応じて変更される。つまり、システム20により試料採集操作が実行されているときに、制御回路64は、バルブ50を選択的に調整するための適切なコマンド信号をバルブ50に送信し、これにより、霧化ガスの流量を、低減状態と通常の試料吸引状態即ち上昇状態との間で調整する。
【0029】
より具体的には、バルブ50を適切に調整することによって、バルブ50を通って流れる霧化ガスの流量が、表面22からの試料の吸引を達成するには不十分である低減された流量レベル又は流動状態まで下げられるか、あるいは表面22からの試料の吸引を達成するのに十分である上昇された流量レベル又は流動状態まで上げられるか、どちらかである。バルブ50がその低減された流動状態に維持されている間は、試料がプローブ24を通じて表面22から吸引されることはなく、一方、バルブ50が(試料採集のための標準状態である)その上昇された流動状態に維持されている間は、一分量の試料が分析のために表面22から吸引される。当然のことながら、バルブ50の調整を制御する上記の制御回路64が、オペレータにより前もってコンピュータ16に入力されたコマンドに従って、バルブ50の調整のためのコマンドを生成する。いずれにしても、図示のシステム20の動作は完全なコンピュータ制御であって、オペレータの介入を必要としない。
【0030】
バルブ50を通って流れる霧化ガスの流量を調整するために制御手段60が用いられる試料採集プロセスの一態様では、プローブ先端部26が、表面22上の所望のXY座標位置に対して静止した試料採集関係に置かれ、一方、バルブ50は低減された流動状態に維持されて、これにより、表面22からの試料採集は回避される。このような状況では、溶液がプローブ先端部26を通じて表面22上に誘導され続けるが、試料採集のための構成部25は待機モードに維持されて、この間、表面22からの試料採集は行なわれない。その後、一分量の試料を表面22から採集することが望ましいときに、バルブ50は、その流量を増加させた状態に戻されて、これによって、試料採集のための構成部25が採集モードに切り替えられて、表面22からの一分量の試料の採集が開始される。低減された流動状態と増加された流動状態との間でバルブ50の調整が繰り返し行なわれることにより、表面22から多数の試料が順に採集されることになる。
【0031】
バルブ50を通じて流れる霧化ガスの流量の制御が可能であることによって、オペレータは、表面22からの試料採集が行なわれる状況及び/又は間隔を、正確に制御することができる。また、霧化ガスの流量が低減された後でも、溶液の流れは表面上22に誘導され続けるので、溶液は表面22上に溜まり続ける、即ち蓄積し続ける。このような蓄積が可能であることは、2つの点で効果的であり得る。まず第1に、試料採集操作の準備として、プローブから表面までの間隔について比較的正確にプローブ先端部26を位置付けるというよりは、そのプローブから表面までの比較的正確な距離よりも若干大きい間隔でプローブ先端部26を位置付けることができる。なぜなら、溶液が表面22上に蓄積されることが可能であるため、その蓄積されたものの高さは、表面22とプローブ先端部26との間に所望のジャンクション54を形成するために必要な高さにまで増大する。つまり、表面22上で溶液の蓄積が可能であることによって、試料採集操作に備えて最初にプローブ先端部26を表面22から離間させて配置する際に必要とされる正確さあるいは厳密度が下がることになる。
【0032】
第2に、このような蓄積が可能であることは、表面22からの試料採集の前に、選択された期間、表面22を溶液にさらすことが望ましいとされる状況において効果的である。即ち、溶液が蓄積したものが表面22上に長く載っているほど、試料が分析のために表面22から吸引される前に、溶液が表面22と相互作用(あるいは、表面に作用)することが可能な期間が長くなる。このように、システム22の動作は、溶液が表面22に誘導された後の試料採集を予め選択された期間(例えば、数秒あるいはそれ以上)遅らせるように、予めプログラムされることが可能である。
【0033】
システム20は、さらに別の特徴として、その全体を図1において80で示す手段を有しており、これは、XY座標平面内でのプローブ先端部26に対する表面22の相対移動と、プローブ24の遠位端部44を越える霧化ガスの流量とを連携させるものである。この目的ため、図示のシステム20では、調整手段80は、例えばコンピュータ16内に実装された制御回路82を含んでおり、これによって、霧化ガスは、表面22とプローブ先端部26との間の相対移動及び/又は相対位置によって決定される状態(即ち、予め選択された状態)で、バルブ50を通って流れるようにされる。
【0034】
システム20を用いて実行されるサンプリング操作の一態様では、連携手段80は、プローブ先端部26が表面22に対して静止した関係に置かれているときにのみ、そこからの試料採集のため、霧化ガスが増加即ち上昇された流量でバルブ50を通って流れるようにし、一方、表面22とプローブ先端部26とが互いに対して相対移動されている間は、バルブ50を通って流れる霧化ガスを低減された流量に維持する。つまり、制御手段80は、表面22がプローブ先端部26に対してXY座標平面内で相対移動されている間は、霧化ガスが増加された流量でバルブ50通って流れることを回避し、これによって、表面22とプローブ先端部26との間の相対移動が進行している間は、表面22からの試料採集が行なわれないようにする。プローブ先端部26において試料吸引のための真空が生成されている間は表面22への溶液の流れは若干増加すると考えられるが、プローブ先端部26に対する表面22のXY移動と、バルブ50を通って流れる霧化ガスの流量制御との間のこのような調整によって、一分量の試料を表面22から採集するのが望ましい時点までは、表面22上に誘導される溶液の流れを削減することで、溶液が節約されると考えられる。
【0035】
システム20を用いて実行されるサンプリング操作の別の態様では、連携手段80は、表面22とプローブ先端部26が互いに対して相対移動されている間、バルブ50を通って流れる霧化ガスを増加された流量に維持し、一方、プローブ先端部26が表面22に対して静止した試料採集のための関係に置かれた後の、予め選択された期間のみ、霧化ガスが低減された流量でバルブ50を通って流れるようにする。このような状況では、表面22に誘導される溶液が、そこからの試料採集が行なわれる前の表面22上に蓄積することが可能である。前述のように、この予め選択された期間によって、溶液が、表面22を構成する物質と相互作用することが可能な時間が与えられることになり、この点で、この期間は効果的であり得る。
【0036】
上記において、分析対象の表面22をサンプリングするための方法及び関連するシステム20についての説明が行なわれたことになる。採集器具24が提供され、そして、その先端部26が、表面22に近接して、表面に合わせた試料採集位置に位置決めされる。その後、供給源40からの溶液が、先端部26を通じて表面22上に誘導される。採集器具の先端部26において試料吸引のための真空を生成させるものである霧化ガスの流れを、制御することによって、採集器具24を用いての表面22からの一分量の試料の採集が制御される。
【0037】
関連するシステム20は、分析対象の表面22に近接させてプローブ24の先端部26を位置決めするための手段と、先端部26を通して供給源40からの溶液を表面22上に誘導するための手段とを有している。供給源42からプローブ24の遠位端部44を越えて流れる霧化ガスの流量を制御することにより、試料の採集が可能な状況及び間隔といった特性を制御することができる。これに関連して、システム20内には、霧化ガスの流量を制御するための制御手段60が含まれており、これにより、試料採集プロセスの特性(例えば、状況、及び連続する試料吸引ステップ間の間隔)が制御される。
【0038】
試料の採集が所望される複数のXY座標位置を表面22が含んでいる状況では、システムは、やはり、連携手段80を有して、これにより、XY座標平面における表面22のプローブ24に対する相対移動と、霧化ガスの流量とを連携させ、これにより、試料採集プロセスの様々な特性を制御する。そのような特性として、限定するものではないが、状況、試料の採集が所望されるXY座標位置、各試料吸引ステップの継続時間、及び連続する試料吸引ステップ間の時間間隔を含むことができる。必要であれば、XY座標平面内でのプローブ24と表面22との間の移動と、霧化ガスの流量とを連携させ、これにより、表面22とプローブ24が互いに対して相対移動されている間は、表面22からの試料吸引が行なわれないようにする。
【0039】
図6a〜6hを参照すると、採集器具の一方の側から撮影した取込み画像が示されており、これらは、霧化ガスの流量が、低減された流動状態と、増加された流動状態即ち表面からの試料採集のための標準的な流動状態との間で調整される間に、ジャンクションが生じ、続いて試料が表面から吸引されるところを順に示している。例えば、図6aでは、採集プローブ24は分析対象の表面スポットの上方に位置付けられており、霧化ガス流量は標準状態である。図6b〜6eでは、霧化ガス流量は、その低減された流量状態まで減少されて、その状態に維持されており、これによって、表面上に誘導される溶液は表面に蓄積し始める。図6f〜6hでは、標準的な霧化ガス流量に戻されて(即ち、その増加された状態、あるいは分析前レベルまで上昇されて)、これにより、ジャンクションを構成して被分析物を豊富に含む溶液が採集され吸引される。
【0040】
図6b〜6eを見ると分かるように、溶液が表面上に蓄積するにつれて、試料が溶液で覆われている領域又はスポットは、その大きさ(即ち直径)が増加する。このような事態は、その後分析のために表面から吸引される溶液が、液状剤により覆われた比較的広い領域からの試料部分を含んでいるという点で、効果的であり得る。
【0041】
上記のシステム及び方法により、(限定するものではないが)約150〜300μmのおおよその幅をもつ液体マイクロジャンクション(LMJ)の形成及び吸引を自動化して、分析的有用性について、およそ650μmの幅をもつプローブを用いて試験を行なった。まず初めに、LMJ‐SSPが、分析対象の表面区画の上方の特定の距離(約150〜300μmの間)に位置付けられ、続いて霧化ガス流量が低減されて、これにより、プローブ24の先端部26(即ち、サンプリング端部)から溶液が滲出することが可能となる。霧化ガス流量が低減された流動状態にある間、プローブ先端部26から滲出する溶液は、表面22上に蓄積することが可能であり、これによって、液体ジャンクションが形成されて、表面22からの被分析物が溶解される。予め選択された期間又は所望の期間が経過した後に、霧化ガス流量が、その分析前レベルまで上昇されて、即ち分析前レベルに戻されて、これにより、ジャンクションを構成して被分析物を豊富に含む溶液が、採集され吸引されることが可能となる。このような機能により、出願人は、マトリクス支援レーザー脱離(MALDI)プレートの表面、及びモルモットの脳組織切片からの自動スポット・サンプリングを実際に示した。このように、本方法論には新規性があり、その方法とは即ち、溶液が滲出するようにすることでジャンクションを形成して被分析物を溶解すること、さらに、圧力制御によりサンプリング・プローブにおける溶液平衡を操作することで被分析物を豊富に含むジャンクションの溶液を吸引することである。サンプリング・プローブにおける溶液平衡を操作するための他の手段として、限定するものではないが、印加するエレクトロスプレー電圧を変えること、表面に電圧プログラムを適用すること、及び溶液流量を変えること、を含むことができる。
【0042】
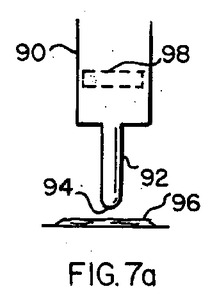
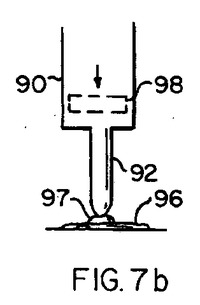
また、本明細書に記載のサンプリング方法は、代替のプローブ・システム(例えば、類似のSSP、あるいはピペット又はシリンジ)と一緒に用いることができ、そのプローブ・システムによって、本明細書で記載したオンラインの連続フロー型分析とはむしろ別の方法による分析のための、溶液の分注と表面からの回収(即ち採集)の両方が行なわれる。例えば、その端部にポート94を備えた分注と採集のためのチューブ92を有するピペット90を用いての、本発明の方法の手順の実行の概観を図7a〜7cに示している。より具体的には、図7aに示すように、ピペット90は、分析対象の表面96に隣接して位置付けられて、これにより、ポート94が表面96に比較的近接して配置される。その後、図7bに示すように、ピペット90に付随する98で示すプランジャーがチューブ92に向かってピペット90の本体内を動かされることで、図7bにおいて97で示す一分量の溶液が、(溶液97が表面96と相互作用することが可能となるように)ポート94を通じて表面96に誘導される。その後、プランジャー98はピペット90の本体を通して引き戻されて、これにより、試料を豊富に含む一分量の溶液が、チューブ92内にそのポート94を通じて吸引される。試料を豊富に含む吸引された溶液は、直接サンプリングされることができ、あるいは、注入ループ、別のワークステーションや、任意のタイプの固相抽出、クロマトグラフィー又は他の液相分離、質量分析測定といった測定又は処理のための別の機器に転送されることも可能である。
【0043】
当然のことながら、上記の実施形態は、本発明の趣旨から逸脱することなく、多くの変形及び置換が可能である。例えば、システム20は、表面22からの一分量の試料の採集のため、表面22の上方でその採集先端部26が垂直軸にほぼ沿って配置されるプローブ24を含むものとして図示され説明されたが、採集先端部26及び表面22は、(一般的には互いに対して垂直に配置されるものの)いくつかの方向のうちいずれの方向に配置することもできる。例えば、表面22を垂直に(即ちYZ座標平面内に)配置し、プローブ先端部26は、その軸がX座標軸に平行になるようにして表面22に近接させて配置することができる。この配置あるいは他のそのような配置では、表面22に誘導された溶液の表面張力は、溶液が重力によって表面22から滴り落ちたり流れたりすることがないほど、十分に大きい。従って、本明細書に記載したシステム22及びプロセスは、サンプリングされる表面の領域上で溶液がウェル内のようにして閉じ込められることを必要としないような表面からの試料採集において用いるのに、特によく適している。
【0044】
このように、上記の実施形態は、例示目的のものであって、限定するものではない。
【技術分野】
【0001】
本発明は、米国エネルギー省とUT‐Battelle,LLCとの間の契約番号DE‐AC05‐00OR22725に基づき、政府の支援の下でなされたものであり、政府は、本発明に一定の権利を有する。
【0002】
本発明は、広くは、サンプリング手段及び方法に関し、より具体的には、一分量の試料を形成して所望の被分析面から吸引するための手段及び方法に関するものである。
【背景技術】
【0003】
本発明の比較対象となる試料採集技術は、分析のため、表面の一分量、より具体的にはその表面の物質を採集する目的で、その被分析面即ちサンプリングされる表面に器具を比較的近接させて位置決めすることに関わるものである。試料採集のために用いられるそのような器具の一例は、サンプリング・プローブの形態のものであり、これは、同心状に配された外管と内管のペアを有して、これにより、プローブの先端(即ち、ポートがある端部)で開口する同心状配置の外側と内側の流通路を提供する。このようなプローブでサンプリング・プロセスが実行されるときには、その先端が、サンプリングされる試料の表面に近接して配置され、溶出液(例えば、試料を溶解する溶媒)が外側の通路を通じて試料の表面に誘導される。溶出溶媒が試料の表面に誘導されたら、サンプリング目的で、その表面から一分量の試料がプローブ先端を通って内側流通路に引き込まれる。
【0004】
上記の類の採集器具の例は、本出願と共通の発明者による特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6803566号
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の目的は、サンプリングされる表面で(試料を豊富に含む一分量の溶液で構成される)試料を形成して、形成された試料をその表面から吸引する、新しく改良された方法及び関連するシステムを提供することである。
【0007】
本発明の別の目的は、一分量の試料をサンプリング目的で抽出する前に、予め選択された期間、試料を溶液にさらすことに適応できる方法を提供することである。
【0008】
本発明のさらに別の目的は、試料の表面のさまざまな位置から試料をサンプリング目的で抽出するのに特に適した方法を提供することである。
【0009】
本発明のさらなる目的は、溶液をある範囲内にとどめるような形状をしていない表面から試料を抽出するのに適した方法を提供することである。
【0010】
本発明のさらなる目的は、その実施が煩雑ではなく、しかもその作用は効果的であるような方法を提供することである。
【課題を解決するための手段】
【0011】
本発明は、被分析面で試料を形成して、形成された試料を被分析面から吸引するための方法及びシステムに属するものである。
【0012】
当該方法は、ポートを備える器具であって、そのポートを通じて溶液が分析対象の表面上に誘導される器具を提供するステップと、器具のポートを分析対象の表面に近接させて位置決めするステップとを含んでいる。そして、溶液が、器具のポートを通じて表面上に誘導されて、これにより表面上に誘導された溶液が、表面を構成する物質と相互作用するようになる。その後、一分量の物質が表面から吸引される。
【0013】
表面サンプリングシステムは、ポートを備える器具であって、そのポートを通じて溶液が分析対象の表面上に誘導され、そのポートを通じて一分量の試料が表面から吸引される器具を有し、さらに、器具のポートを分析対象の表面に近接させて位置決めする手段を有している。加えて、当該システムは、器具のポートを通じて表面上に溶液を誘導する手段であって、これにより、表面上に誘導された溶液を、表面を構成する物質と相互作用させる手段を有し、さらに、器具のポートを通じて表面から一分量の物質を吸引する手段を有している。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の特徴を取り入れたシステムの一例の概略図である。
【図2】図2は、図1のシステムの、試料採集のための構成部を含む選択された構成要素の縦断面図である。
【図3】図3は、図1のシステムで用いられる採集器具の先端部を拡大して示す縦断面図である。
【図4】図4は、図3に示す採集器具の先端部の斜視図、及び、試料の採集が所望されている表面の概観である。
【図5】図5は、図3に類似した図であって、採集器具と、試料の採集が所望されている表面との境界面におけるジャンクションの形成を示している。
【図6】図6a〜6hは、図3〜4の採集器具の一方の側から撮影されたキャプチャ画像であって、液体ジャンクションが生じ、それに続いて、その形成されたジャンクションが採集器具により表面から吸引されるところを順に示している。
【図7】図7a〜7cは、ピペットを用いて本発明の方法を実行する手順を概略的に示す側面立面図である。
【発明を実施するための形態】
【0015】
以下、実施形態の一例と関連させて、本発明について説明する。それは、図1においてその全体を20で表して概略的に示す、エレクトロスプレー(ESI)システムの実施形態であって、これを用いて本発明の方法の手順を実行することが可能である。また、この実施形態は、後に続く分析に向けて、(サンプリングされる表面を具現化している)表面22の少なくとも1つのスポット又は領域から試料を取得する目的のため、本発明の特徴をその中で具現化しているものである。簡単に言えば、本発明の方法は、ピペットやシリンジなど、溶液を表面22に誘導することで、表面22を構成する物質と溶液を相互作用させ、その後、一分量の物質を表面22から試料として吸引するために用いることができる幾つかの適した器具のうち、いずれを用いて実行することもできる。従って、当然のことながら、本明細書で提示及び説明される図示のシステム20は、それによって本発明の方法を実行することができるシステムの一例である。
【0016】
サンプリングされる表面22は、例えば、その試料を質量分析計23で分析することが所望される配列とすることができるが、このシステム20は、対象となるあるいろいろな表面のうち任意のものをサンプリングするために用いることができ、TLCプレート、親和性配列、及び組織切片の読み出しに特に有用であると考えられる。このように、本発明の原理は様々に応用することができる。
【0017】
出願人は、いくつかの例で、表面サンプリングから後に続く質量分光(MS)分析に向けたインタフェースとして、複合型液体ジャンクション表面サンプリング・プローブ(LMJ‐SSP)の利用を実際に示してきた。この装置は、表面から物質をサンプリングするために、表面サンプリング・プローブと表面との液体マイクロジャンクション、及び、自己吸引型エレクトロスプレーイオン化(ESI)又は大気圧化学イオン化(APCI)エミッタを利用する。これらLMJ‐SSP/ESI及びLMJ‐SSP/APCIカップリングの分析的有用性を、市販の逆相(RP)C8及びC18薄層クロマトグラフィー(TLC)プレート、親和性配列、及び組織切片において分離された様々な被分析物の定性分析及び定量分析により実証した。液体ジャンクションの幅は、以前のこういった例では、20〜60μmの範囲内であった。サンプリング・プローブと表面との液体ジャンクション(幅20〜60μm)の形成は、後に画像解析を用いて自動化された。しかしながら、この自動化された方法は、液体ジャンクションを形成するのにおよそ15〜30秒を要し、このことが、高スループットの表面サンプリングシステムにおいてLMJ‐SSPが実用的インタフェースと見なされることを阻んでいる。本明細書で説明するように、出願人は、高スループット・サンプリングという目的により良く適合すると考えられる、SSP器具を用いた試料採集の方法論を開発した。
【0018】
図1〜3を参照して、図示のシステム20は、その全体を25で示す試料採集のための構成部を有し、これは表面サンプリング・プローブ24の形態の採集器具を含み、この器具の終端の(ポート37を提供する)先端部26は、表面22から試料を採集するために表面22に近接させて位置決めすることが可能である。図示のシステム22のサンプリング・プローブ24は、同心状に配された内管32と外管30とを有して(図2及び図3)、これにより、内側流通路34及び外側流通路36をそれぞれ提供するものであるが、当然のことながら、本発明の方法の手順を実行するのに適した器具は、別の形態を取るものとすることもできる。
【0019】
試料採集のための構成部25は、さらに、その全体を図2において38で示す手段を含んでおり、これは、溶出溶媒といった液状の試料溶解剤又は溶液を、サンプリングされる表面22に堆積させる目的で、プローブ24の外側流通路36に誘導するためのものである。このため、溶剤誘導手段38は、液状剤の供給源40を含み、また、外側流通路36に流体連結されていて、これにより、外側流通路36に送り込まれた液状溶解剤は、プローブ先端部26から滲出することにより流出して、大気圧環境において表面22に堆積されることが可能である。外側流通路36への溶液の流入は、供給源40から外側流通路36への溶液の流れに沿って接続されたポンプ(図示せず)、あるいは駆動可能なレギュレータ又はバルブ39により制御することができる。
【0020】
試料採集のための構成部25は、さらに、その全体を図2において41で示す手段を含んでおり、これは、霧化ガス流をプローブ24に対してその内部の圧力を変化させるようにして送達するためのものである。このような供給手段41は、霧化ガスの供給源42を含んでおり、圧力の下、霧化ガスは44で示すプローブ24の遠位端部(即ち、先端部26と反対側のプローブ端部)を通り過ぎる経路をたどる。霧化ガス流が十分に高い流速でプローブ24の端部44を通り過ぎるようにすることで、プローブ先端部26に隣接して位置する一分量の試料が、(プローブ24の端部44と先端部26との間に生じる圧力差によって)表面22から吸引され、そして、採集された試料はその分析のため、スプレー46状の霧化ガスにより質量分析計23に向かって運ばれる。供給源42からの霧化ガスの流れに沿って接続された駆動可能なレギュレータ又はバルブ50によって、供給源42からの霧化ガスの流れを制御することができる。
【0021】
システム20の作動中には、プローブ先端部26が、表面22上のある場所に近接して位置決めされ、そして、一分量の溶液又は液状剤が供給源40からプローブ24の外側流通路36を通って流れるようにされて、これにより、溶液はプローブ先端部26から外へ誘導されて表面22上に堆積し、そこで溶液は表面22を構成する物質と相互作用することが可能である。表面22から一分量の物質を採集するのが望ましいときに、霧化ガスの流量がプローブ24の遠位端部44を越えるようにされて、これにより、一分量の試料が、堆積した溶液と共に表面22から引き上げられて、内側流通路32を通り、スプレー46状にされて、プローブ24の遠位端部44から外に運ばれる(図2)。
【0022】
図3及び4を参照すると、分析のため、一分量の試料の採集が所望される表面22の例が示されている。図示の表面22内において、試料は図示されたXY座標平面に広がって全体としてその平面内に配置されている。サンプリングされる表面22に渡って、任意のXY座標位置、スポット、又は場所からの試料の採集を可能とするため、プローブ24はその先端部26と共に、サンプリングされる表面22に関して固定の静止状態で支持される。一方、その表面22は、支持板27の上に支持されており、図示されたXY座標軸に沿って、即ち支持板27の平面内において、さらには図示されたZ座標軸に沿ってプローブ先端部26に近づいたり離れたりするようにして、プローブ先端部26に対して相対移動するようになっている。図示のシステムの支持板27は、例えば、薄層クロマトグラフィー(TLC)プレートの形態をとるものとすることができ、その上には分析が所望される物質の一分量が配置される。本明細書における考察においては、サンプリングされる表面22は、支持板27によりXY平面内に支持されていることになり、Z軸はXY平面に垂直である。
【0023】
図1を再び参照して、その支持板27は、XYZステージ28(図1)の可動支持アーム18の上に支持されるようにして取り付けられており、これによって、支持板27とそこに支持されている表面22は、図示されたX、Y、及びZ座標の方向に沿って移動する。XYZステージ28は、ジョイスティック操作ユニット29に適切に配線接続されており、そしてこのユニットは、第1の制御コンピュータ16に接続されている。第1の制御コンピュータは、ジョイスティック操作ユニットからコマンド信号を受け取るものであって、これにより、サンプリング・プロセスがシステム20で実行される際に採集管の先端部26の下で表面22がXY平面内で移動して、表面22に沿って或いは表面22上の任意の所望のレーン(即ち1つのX又はY座標パス)に沿って、任意の所望の場所(即ち任意の所望のXY座標位置)から試料を取得することができる。
【0024】
例えば、図3及び4においては、表面22から試料を採集するため、表面22上方の試料採集位置に配置されたプローブ24の概観を示している。表面22上の別のXY座標位置に近接した試料採集位置、即ちそのXY座標位置上方の試料採集位置にプローブ先端部26を再配置するため、プローブ先端部26の下方で、表面22には適切にインデックスが付けられており、これによって、プローブ先端部26は、そこからの一分量の試料の採集が望まれている所望の表面位置に近接させて再配置される。掃引速度、及び試料採集時にプローブ24が位置決めされる、表面22に合わせた試料採集レジストリにおける望ましいXY位置の識別情報など、表面22とプローブ先端部26の相対移動の特性は、例えば、コンピュータ・キーボード17によってコンピュータ16に入力することができ、あるいは、コンピュータ16のメモリ内に予めプログラムしておくことができる。
【0025】
XYZステージ28の内部コンポーネントについての説明は必要ないと考えられるが、あえて言うならば、プローブ先端部26に対する支持面27(及び表面22)のX及びY座標の位置は、例えば、XYZステージ28の内部に取り付けられた可逆サーボモータ(図示せず)のペアを適切に駆動することにより制御され、一方、プローブ先端部26に対する支持面27(及び表面22)のZ座標の位置は、例えば、XYZステージ28の内部に取り付けられた可逆ステッピングモータ(図示せず)を適切に駆動することにより制御される。従って、X及びY座標のサーボモータへの通電を適切に行なうことにより、プローブ24の先端部26が表面22のXY座標平面内の任意のXY座標位置に合わせた試料採集レジストリに位置決めされるように、表面22を位置付けることができ、また、Z軸のステッピングモータへの通電を適切に行なうことにより、表面22を、プローブ先端部26に近づけるように、あるいは離れるように動かすことができる。
【0026】
図1を再び参照して、図示のシステム20は、さらに、質量分析計23を有しており、これは、試料採集のための構成部25(図2)に隣接して配置されて、分析目的でそこに送られる、試料を含むスプレー46を受け取るものである。この質量分析計23には、第2の制御コンピュータ19が関連付けられており、これによって、質量分析計23の動作及び機能を制御する。図示のシステム20で質量分析計23として用いるのに適した質量分析計の例は、カナダのオンタリオ州コンコードのMDS SCIEX社から4000 Qtrapという商品名で入手可能なものである。図示のシステム20では、(質量分析計23を含む)システム・コンポーネントの様々な動作を制御するために、2つの個別のコンピュータ16及び19を用いているが、このシステム20内で実行されるすべての動作を、本発明の利益のために、1つのコンピュータで制御することが可能であり、あるいは代替案として、質量分析計のソフトウェアパッケージ内に取り込まれた適当なソフトウェア・コンポーネントにより制御することができる。この後者の例では、1つのソフトウェアパッケージにより、XYZステージの動作と質量分析計による検出を制御することもできる。
【0027】
システム20により試料採集操作が実行される際には、表面22の所望のXY座標位置から試料を採集するため、表面22とプローブ24が、必要に応じて、X及びY座標方向に沿って互いに相対移動させられて、これにより、プローブ先端部26が、表面22の所望のXY座標位置となるように、表面22に合わせた試料採集レジストリ(即ち静止位置)に位置決めされる。このために、適当なコマンド信号が、コンピュータ16から、XYZステージ28に付随するモータに送信されて、これにより、プローブ先端部26が、表面22の所望のXY座標位置に合わせた試料採集レジストリに位置決めされる。そして、駆動可能なバルブ39が開かれることで、溶液が外側流通路36を流れるようになって、プローブ先端部26を通って表面22上に至り、これによって、表面22が液状剤にさらされる。さらに、駆動可能なバルブ50も開かれることで、霧化ガスが、バルブ50を通ってプローブ26の遠位端部44を通り過ぎるという順序で流れ、これによって、その場所での圧力が下がる。プローブ24の遠位端部44と先端部26との間に生じる圧力差によって、表面22からの一分量の試料(例えば、図5において52で示す物質)が、供給源40から送られた分量の溶液と共に、分析のために質量分析計23へ運ばれる。
【0028】
図示のシステム20は、その特徴の1つとして、その全体を図1において60で示す手段を有しており、これは、バルブ50を通じた霧化ガスの流れを制御するためのものである。これによって、表面22に送られた溶液による試料の形成と、それに続くプローブ24を用いた表面22からの試料(即ち、図5に54で示す、試料を豊富に含むジャンクションの形態のもの)の吸引が、制御される。図示のシステム20では、制御手段60は、先に紹介した、プローブ24の遠位端部44を越えて誘導される霧化ガスの流れに沿って接続されたバルブ50を含んでおり、さらに、制御回路64を含んでいて、これは例えばコンピュータ16内に実装されて、バルブ50に接続されており、これによって、バルブ50を通じて移動する霧化ガスの流量が要求に応じて変更される。つまり、システム20により試料採集操作が実行されているときに、制御回路64は、バルブ50を選択的に調整するための適切なコマンド信号をバルブ50に送信し、これにより、霧化ガスの流量を、低減状態と通常の試料吸引状態即ち上昇状態との間で調整する。
【0029】
より具体的には、バルブ50を適切に調整することによって、バルブ50を通って流れる霧化ガスの流量が、表面22からの試料の吸引を達成するには不十分である低減された流量レベル又は流動状態まで下げられるか、あるいは表面22からの試料の吸引を達成するのに十分である上昇された流量レベル又は流動状態まで上げられるか、どちらかである。バルブ50がその低減された流動状態に維持されている間は、試料がプローブ24を通じて表面22から吸引されることはなく、一方、バルブ50が(試料採集のための標準状態である)その上昇された流動状態に維持されている間は、一分量の試料が分析のために表面22から吸引される。当然のことながら、バルブ50の調整を制御する上記の制御回路64が、オペレータにより前もってコンピュータ16に入力されたコマンドに従って、バルブ50の調整のためのコマンドを生成する。いずれにしても、図示のシステム20の動作は完全なコンピュータ制御であって、オペレータの介入を必要としない。
【0030】
バルブ50を通って流れる霧化ガスの流量を調整するために制御手段60が用いられる試料採集プロセスの一態様では、プローブ先端部26が、表面22上の所望のXY座標位置に対して静止した試料採集関係に置かれ、一方、バルブ50は低減された流動状態に維持されて、これにより、表面22からの試料採集は回避される。このような状況では、溶液がプローブ先端部26を通じて表面22上に誘導され続けるが、試料採集のための構成部25は待機モードに維持されて、この間、表面22からの試料採集は行なわれない。その後、一分量の試料を表面22から採集することが望ましいときに、バルブ50は、その流量を増加させた状態に戻されて、これによって、試料採集のための構成部25が採集モードに切り替えられて、表面22からの一分量の試料の採集が開始される。低減された流動状態と増加された流動状態との間でバルブ50の調整が繰り返し行なわれることにより、表面22から多数の試料が順に採集されることになる。
【0031】
バルブ50を通じて流れる霧化ガスの流量の制御が可能であることによって、オペレータは、表面22からの試料採集が行なわれる状況及び/又は間隔を、正確に制御することができる。また、霧化ガスの流量が低減された後でも、溶液の流れは表面上22に誘導され続けるので、溶液は表面22上に溜まり続ける、即ち蓄積し続ける。このような蓄積が可能であることは、2つの点で効果的であり得る。まず第1に、試料採集操作の準備として、プローブから表面までの間隔について比較的正確にプローブ先端部26を位置付けるというよりは、そのプローブから表面までの比較的正確な距離よりも若干大きい間隔でプローブ先端部26を位置付けることができる。なぜなら、溶液が表面22上に蓄積されることが可能であるため、その蓄積されたものの高さは、表面22とプローブ先端部26との間に所望のジャンクション54を形成するために必要な高さにまで増大する。つまり、表面22上で溶液の蓄積が可能であることによって、試料採集操作に備えて最初にプローブ先端部26を表面22から離間させて配置する際に必要とされる正確さあるいは厳密度が下がることになる。
【0032】
第2に、このような蓄積が可能であることは、表面22からの試料採集の前に、選択された期間、表面22を溶液にさらすことが望ましいとされる状況において効果的である。即ち、溶液が蓄積したものが表面22上に長く載っているほど、試料が分析のために表面22から吸引される前に、溶液が表面22と相互作用(あるいは、表面に作用)することが可能な期間が長くなる。このように、システム22の動作は、溶液が表面22に誘導された後の試料採集を予め選択された期間(例えば、数秒あるいはそれ以上)遅らせるように、予めプログラムされることが可能である。
【0033】
システム20は、さらに別の特徴として、その全体を図1において80で示す手段を有しており、これは、XY座標平面内でのプローブ先端部26に対する表面22の相対移動と、プローブ24の遠位端部44を越える霧化ガスの流量とを連携させるものである。この目的ため、図示のシステム20では、調整手段80は、例えばコンピュータ16内に実装された制御回路82を含んでおり、これによって、霧化ガスは、表面22とプローブ先端部26との間の相対移動及び/又は相対位置によって決定される状態(即ち、予め選択された状態)で、バルブ50を通って流れるようにされる。
【0034】
システム20を用いて実行されるサンプリング操作の一態様では、連携手段80は、プローブ先端部26が表面22に対して静止した関係に置かれているときにのみ、そこからの試料採集のため、霧化ガスが増加即ち上昇された流量でバルブ50を通って流れるようにし、一方、表面22とプローブ先端部26とが互いに対して相対移動されている間は、バルブ50を通って流れる霧化ガスを低減された流量に維持する。つまり、制御手段80は、表面22がプローブ先端部26に対してXY座標平面内で相対移動されている間は、霧化ガスが増加された流量でバルブ50通って流れることを回避し、これによって、表面22とプローブ先端部26との間の相対移動が進行している間は、表面22からの試料採集が行なわれないようにする。プローブ先端部26において試料吸引のための真空が生成されている間は表面22への溶液の流れは若干増加すると考えられるが、プローブ先端部26に対する表面22のXY移動と、バルブ50を通って流れる霧化ガスの流量制御との間のこのような調整によって、一分量の試料を表面22から採集するのが望ましい時点までは、表面22上に誘導される溶液の流れを削減することで、溶液が節約されると考えられる。
【0035】
システム20を用いて実行されるサンプリング操作の別の態様では、連携手段80は、表面22とプローブ先端部26が互いに対して相対移動されている間、バルブ50を通って流れる霧化ガスを増加された流量に維持し、一方、プローブ先端部26が表面22に対して静止した試料採集のための関係に置かれた後の、予め選択された期間のみ、霧化ガスが低減された流量でバルブ50を通って流れるようにする。このような状況では、表面22に誘導される溶液が、そこからの試料採集が行なわれる前の表面22上に蓄積することが可能である。前述のように、この予め選択された期間によって、溶液が、表面22を構成する物質と相互作用することが可能な時間が与えられることになり、この点で、この期間は効果的であり得る。
【0036】
上記において、分析対象の表面22をサンプリングするための方法及び関連するシステム20についての説明が行なわれたことになる。採集器具24が提供され、そして、その先端部26が、表面22に近接して、表面に合わせた試料採集位置に位置決めされる。その後、供給源40からの溶液が、先端部26を通じて表面22上に誘導される。採集器具の先端部26において試料吸引のための真空を生成させるものである霧化ガスの流れを、制御することによって、採集器具24を用いての表面22からの一分量の試料の採集が制御される。
【0037】
関連するシステム20は、分析対象の表面22に近接させてプローブ24の先端部26を位置決めするための手段と、先端部26を通して供給源40からの溶液を表面22上に誘導するための手段とを有している。供給源42からプローブ24の遠位端部44を越えて流れる霧化ガスの流量を制御することにより、試料の採集が可能な状況及び間隔といった特性を制御することができる。これに関連して、システム20内には、霧化ガスの流量を制御するための制御手段60が含まれており、これにより、試料採集プロセスの特性(例えば、状況、及び連続する試料吸引ステップ間の間隔)が制御される。
【0038】
試料の採集が所望される複数のXY座標位置を表面22が含んでいる状況では、システムは、やはり、連携手段80を有して、これにより、XY座標平面における表面22のプローブ24に対する相対移動と、霧化ガスの流量とを連携させ、これにより、試料採集プロセスの様々な特性を制御する。そのような特性として、限定するものではないが、状況、試料の採集が所望されるXY座標位置、各試料吸引ステップの継続時間、及び連続する試料吸引ステップ間の時間間隔を含むことができる。必要であれば、XY座標平面内でのプローブ24と表面22との間の移動と、霧化ガスの流量とを連携させ、これにより、表面22とプローブ24が互いに対して相対移動されている間は、表面22からの試料吸引が行なわれないようにする。
【0039】
図6a〜6hを参照すると、採集器具の一方の側から撮影した取込み画像が示されており、これらは、霧化ガスの流量が、低減された流動状態と、増加された流動状態即ち表面からの試料採集のための標準的な流動状態との間で調整される間に、ジャンクションが生じ、続いて試料が表面から吸引されるところを順に示している。例えば、図6aでは、採集プローブ24は分析対象の表面スポットの上方に位置付けられており、霧化ガス流量は標準状態である。図6b〜6eでは、霧化ガス流量は、その低減された流量状態まで減少されて、その状態に維持されており、これによって、表面上に誘導される溶液は表面に蓄積し始める。図6f〜6hでは、標準的な霧化ガス流量に戻されて(即ち、その増加された状態、あるいは分析前レベルまで上昇されて)、これにより、ジャンクションを構成して被分析物を豊富に含む溶液が採集され吸引される。
【0040】
図6b〜6eを見ると分かるように、溶液が表面上に蓄積するにつれて、試料が溶液で覆われている領域又はスポットは、その大きさ(即ち直径)が増加する。このような事態は、その後分析のために表面から吸引される溶液が、液状剤により覆われた比較的広い領域からの試料部分を含んでいるという点で、効果的であり得る。
【0041】
上記のシステム及び方法により、(限定するものではないが)約150〜300μmのおおよその幅をもつ液体マイクロジャンクション(LMJ)の形成及び吸引を自動化して、分析的有用性について、およそ650μmの幅をもつプローブを用いて試験を行なった。まず初めに、LMJ‐SSPが、分析対象の表面区画の上方の特定の距離(約150〜300μmの間)に位置付けられ、続いて霧化ガス流量が低減されて、これにより、プローブ24の先端部26(即ち、サンプリング端部)から溶液が滲出することが可能となる。霧化ガス流量が低減された流動状態にある間、プローブ先端部26から滲出する溶液は、表面22上に蓄積することが可能であり、これによって、液体ジャンクションが形成されて、表面22からの被分析物が溶解される。予め選択された期間又は所望の期間が経過した後に、霧化ガス流量が、その分析前レベルまで上昇されて、即ち分析前レベルに戻されて、これにより、ジャンクションを構成して被分析物を豊富に含む溶液が、採集され吸引されることが可能となる。このような機能により、出願人は、マトリクス支援レーザー脱離(MALDI)プレートの表面、及びモルモットの脳組織切片からの自動スポット・サンプリングを実際に示した。このように、本方法論には新規性があり、その方法とは即ち、溶液が滲出するようにすることでジャンクションを形成して被分析物を溶解すること、さらに、圧力制御によりサンプリング・プローブにおける溶液平衡を操作することで被分析物を豊富に含むジャンクションの溶液を吸引することである。サンプリング・プローブにおける溶液平衡を操作するための他の手段として、限定するものではないが、印加するエレクトロスプレー電圧を変えること、表面に電圧プログラムを適用すること、及び溶液流量を変えること、を含むことができる。
【0042】
また、本明細書に記載のサンプリング方法は、代替のプローブ・システム(例えば、類似のSSP、あるいはピペット又はシリンジ)と一緒に用いることができ、そのプローブ・システムによって、本明細書で記載したオンラインの連続フロー型分析とはむしろ別の方法による分析のための、溶液の分注と表面からの回収(即ち採集)の両方が行なわれる。例えば、その端部にポート94を備えた分注と採集のためのチューブ92を有するピペット90を用いての、本発明の方法の手順の実行の概観を図7a〜7cに示している。より具体的には、図7aに示すように、ピペット90は、分析対象の表面96に隣接して位置付けられて、これにより、ポート94が表面96に比較的近接して配置される。その後、図7bに示すように、ピペット90に付随する98で示すプランジャーがチューブ92に向かってピペット90の本体内を動かされることで、図7bにおいて97で示す一分量の溶液が、(溶液97が表面96と相互作用することが可能となるように)ポート94を通じて表面96に誘導される。その後、プランジャー98はピペット90の本体を通して引き戻されて、これにより、試料を豊富に含む一分量の溶液が、チューブ92内にそのポート94を通じて吸引される。試料を豊富に含む吸引された溶液は、直接サンプリングされることができ、あるいは、注入ループ、別のワークステーションや、任意のタイプの固相抽出、クロマトグラフィー又は他の液相分離、質量分析測定といった測定又は処理のための別の機器に転送されることも可能である。
【0043】
当然のことながら、上記の実施形態は、本発明の趣旨から逸脱することなく、多くの変形及び置換が可能である。例えば、システム20は、表面22からの一分量の試料の採集のため、表面22の上方でその採集先端部26が垂直軸にほぼ沿って配置されるプローブ24を含むものとして図示され説明されたが、採集先端部26及び表面22は、(一般的には互いに対して垂直に配置されるものの)いくつかの方向のうちいずれの方向に配置することもできる。例えば、表面22を垂直に(即ちYZ座標平面内に)配置し、プローブ先端部26は、その軸がX座標軸に平行になるようにして表面22に近接させて配置することができる。この配置あるいは他のそのような配置では、表面22に誘導された溶液の表面張力は、溶液が重力によって表面22から滴り落ちたり流れたりすることがないほど、十分に大きい。従って、本明細書に記載したシステム22及びプロセスは、サンプリングされる表面の領域上で溶液がウェル内のようにして閉じ込められることを必要としないような表面からの試料採集において用いるのに、特によく適している。
【0044】
このように、上記の実施形態は、例示目的のものであって、限定するものではない。
【特許請求の範囲】
【請求項1】
分析対象の表面上で試料を形成して、前記形成された試料をその表面から吸引するための方法であって、
ポートを備える器具であって、そのポートを通じて溶液が前記分析対象の表面上に誘導される器具を、提供するステップと、
前記器具のポートを前記分析対象の表面に近接させて位置決めするステップと、
前記器具のポートを通じて前記表面上に前記溶液を誘導するステップであって、これにより、前記表面上に誘導された前記溶液が、前記表面を構成する物質と相互作用するようになる、ステップと、
前記表面から一分量の物質を吸引するステップと
から構成されることを特徴とする方法。
【請求項2】
前記誘導するステップは、前記器具のポートを前記表面に対して静止した関係に維持するステップを含んでおり、これにより、前記溶液が前記表面上に誘導される間、前記器具のポートは前記表面に対して静止した関係に維持される、請求項1に記載の方法。
【請求項3】
前記誘導するステップの後には、前記吸引するステップが実行される前に、予め選択された期間を経過させるステップが続き、これにより、前記表面から前記物質が吸引される前に、前記予め選択された期間の継続時間の間、前記溶液は前記表面の前記物質と相互作用することが可能である、請求項1に記載の方法。
【請求項4】
前記吸引するステップは、前記溶液を前記表面に誘導するために用いた前記器具で実行される、請求項1に記載の方法。
【請求項5】
前記吸引するステップでは、前記表面の前記物質の一分量の吸引が、前記溶液の前記表面への誘導が前記器具の前記ポートを通じて行われたそのポートを通じて達成される、請求項1に記載の方法。
【請求項6】
前記器具を位置決めするステップでは、前記器具のポートは、前記分析対象の表面上の第1の位置に近接して位置決めされ、
前記誘導するステップの後には、
前記器具を、前記分析対象の表面上の第2の位置に移動させるステップと、
前記溶液の一分量を、前記採集器具のポートを通じて、前記表面上の前記第2の位置に誘導するステップと、
前記第1の位置で前記表面から一分量の物質が吸引される前に、前記器具のポートを前記第1の位置に近接させて再配置するステップと、が続く、請求項1に記載の方法。
【請求項7】
前記表面は、実質的にXY平面内に配置されていて、前記表面上に、そこからの試料の採集が所望される複数のXY座標位置が含まれており、
前記XY平面内で前記表面を前記採集器具に対して相対移動させることにより、前記採集器具のポートが、試料採集のために、前記表面上の前記XY座標位置の選択された1つに近接させて位置決めされる、ステップをさらに含み、
前記移動させるステップと制御するステップとが、互いに連携されることで、試料採集操作の特性が制御される、請求項1に記載の方法。
【請求項8】
前記誘導するステップでは、前記器具のポートと前記表面との間にジャンクションが形成されて、その形成されたジャンクションが、その後の前記吸引するステップで、前記表面から吸引される、請求項1に記載の方法。
【請求項9】
前記吸引するステップは、前記器具のポートにおける圧力を操作することにより達成される、請求項8に記載の方法。
【請求項10】
分析対象の表面上で試料を形成して、前記形成された試料をその表面から吸引するための方法であって、
ポートを備える採集器具であって、そのポートを通じて溶液が前記分析対象の表面上に誘導され、そのポートを通じて一分量の前記試料が前記表面から吸引される、採集器具を、提供するステップと、
前記採集器具のポートを、前記表面に近接させて、前記表面に合わせた試料採集位置に位置決めするステップと、
前記採集器具のポートを通じて前記表面上に前記溶液を誘導するステップであって、これにより、前記表面上に誘導された前記溶液が、前記表面を構成する物質と相互作用するようになる、ステップと、
前記採集器具を用いて、前記表面から一分量の物質を吸引するステップとから構成されることを特徴とする方法。
【請求項11】
前記誘導するステップは、前記採集器具のポートを前記表面に対して静止した関係に維持するステップを含んでおり、これにより、前記溶液が前記表面上に誘導される間、前記器具のポートは前記表面に対して静止した関係に維持される、請求項10に記載の方法。
【請求項12】
前記誘導するステップの後には、前記吸引するステップが実行される前に、予め選択された期間を経過させるステップが続き、これにより、前記表面から前記物質が吸引される前に、前記予め選択された期間の継続時間の間、前記溶液は前記表面の前記物質と相互作用することが可能である、請求項10に記載の方法。
【請求項13】
前記器具を位置決めするステップでは、前記器具のポートは、前記分析対象の表面上の第1の位置に近接して位置決めされ、
前記誘導するステップの後には、
前記器具を、前記分析対象の表面上の第2の位置に移動させるステップと、
前記溶液の一分量を、前記採集器具のポートを通じて、前記表面上の前記第2の位置に誘導するステップと、
前記第1の位置で前記表面からの一分量の物質が吸引される前に、前記器具のポートを前記第1の位置に近接させて再配置するステップと、が続く、請求項10に記載の方法。
【請求項14】
前記表面は、実質的にXY平面内に配置されていて、前記表面上に、そこからの試料の採集が所望される複数のXY座標位置が含まれており、
当該方法は、前記XY平面内で前記表面を前記採集器具に対して相対移動させるステップであって、これにより、前記採集器具のポートが、試料採集のために、前記表面上の前記XY座標位置の選択された1つに近接させて位置決めされる、ステップをさらに含み、
前記移動させるステップと制御するステップとが、互いに連携されることで、試料採集操作の特性が制御される、請求項10に記載の方法。
【請求項15】
前記誘導するステップでは、前記器具のポートと前記表面との間にジャンクションが形成されて、その形成されたジャンクションが、その後の前記吸引するステップで、前記表面から吸引される、請求項10記載の方法。
【請求項16】
前記吸引するステップは、前記器具のポートにおける圧力を操作することにより達成される、請求項15に記載の方法。
【請求項17】
試料を多く含む液体ジャンクションを形成して、分析対象の表面から吸引するための方法であって、
ポートを備える採集器具であって、さらに、それを通じて溶液が前記分析対象の表面上に誘導される1つの通路と、それを通じて一分量の試料が前記表面から吸引される別の通路とを備える、採集器具を、提供するステップと、
前記採集器具のポートを、試料採集のため、前記表面に対して所望の位置関係で位置決めするステップと、
前記採集器具の前記1つの通路により、溶液を、前記採集器具のポートを通じて前記表面上に誘導するステップであって、これにより、前記表面上に誘導された前記溶液が、前記表面を構成する物質と相互作用するようになって、そこで、試料を多く含む液体ジャンクションが形成される、ステップと、
前記採集器具の前記別の通路を通じて、前記表面から前記試料を多く含む液体ジャンクションを吸引するステップとから構成されることを特徴とする方法。
【請求項18】
前記吸引するステップは、前記器具のポートにおける圧力を操作することにより達成される、請求項17に記載の方法。
【請求項19】
前記吸引するステップは、霧化ガス流を用いて達成され、この霧化ガス流を制御することで、前記表面からの前記試料の吸引が制御される、請求項18に記載の方法。
【請求項20】
前記制御するステップでは、前記霧化ガスの流量が、低減された状態と上昇された状態との間で変更され、低減された状態のときには、前記採集器具のポートと前記表面との間で液体ジャンクションの形成が可能であり、上昇された状態のときには、前記形成されたジャンクションが前記表面から前記採集器具により吸引される、請求項19に記載の方法。
【請求項21】
前記表面は、実質的にXY平面内に配置されていて、前記表面上に、そこからの試料の採集が所望される複数のXY座標位置が含まれており、
当該方法は、前記試料の表面を前記採集器具に対して相対移動させるステップであって、これにより、前記採集器具のポートが、試料採集のために、前記表面上の前記XY座標位置の選択された1つに近接させて位置決めされる、ステップをさらに含み、
前記移動させるステップと制御するステップとが連携されることで、試料採集操作の特性が制御される、請求項20に記載の方法。
【請求項22】
試料を形成して、それを分析対象の表面から分析のために吸引する、表面サンプリングシステムであって、
ポート備える器具であって、そのポートを通じて溶液が前記分析対象の表面上に誘導され、そのポートを通じて一分量の試料が前記表面から吸引される、器具と、
前記器具のポートを前記分析対象の表面に近接させて位置決めする手段と、
前記器具のポートを通じて前記表面上に前記溶液を誘導する手段であって、これにより、前記表面上に誘導された前記溶液が、前記表面を構成する物質と相互作用するようになる、手段と、
前記器具のポートを通じて、前記表面から一分量の物質を吸引する手段とから構成されることを特徴とするシステム。
【請求項23】
前記吸引する手段は、前記器具のポートにおける圧力を操作することにより達成される、請求項22に記載のシステム。
【請求項24】
前記吸引する手段は、霧化ガス流を用いて達成され、
当該システムは、前記霧化ガス流を制御する手段をさらに有し、これにより前記霧化ガス流を制御することで、前記表面からの前記試料の吸引が制御される、請求項22に記載のシステム。
【請求項25】
前記制御する手段は、前記霧化ガスの流量を、低減された状態と上昇された状態との間で変更するように構成されており、低減された状態のときには、前記採集器具による前記表面からの試料の採集は行なわれず、上昇された状態のときには、前記採集器具により一分量の試料が前記表面から採集される、請求項24に記載のシステム。
【請求項26】
前記採集器具によりサンプリングされる前記表面は、実質的にXY平面内に配置されていて、前記採集器具からZ座標軸に沿って離間されており、
当該システムは、前記XY平面内で前記表面と前記採集器具のポートを互いに対して相対移動させる手段をさらに有し、これにより、前記表面に沿った複数のXY座標位置のうち任意の位置を、試料採集のために、前記ポートに近接させて位置決めすることができる、請求項22に記載のシステム。
【請求項27】
前記表面は、そこからの試料の採集が所望される複数のXY座標位置を含んでおり、
当該システムは、前記一分量の物質の吸引を、前記XY座標平面での前記表面に対する前記器具のポートの位置決めに連携させる手段をさらに有し、これにより、当該システムにより実行される試料採集操作の特性が制御される、請求項22に記載のシステム。
【請求項1】
分析対象の表面上で試料を形成して、前記形成された試料をその表面から吸引するための方法であって、
ポートを備える器具であって、そのポートを通じて溶液が前記分析対象の表面上に誘導される器具を、提供するステップと、
前記器具のポートを前記分析対象の表面に近接させて位置決めするステップと、
前記器具のポートを通じて前記表面上に前記溶液を誘導するステップであって、これにより、前記表面上に誘導された前記溶液が、前記表面を構成する物質と相互作用するようになる、ステップと、
前記表面から一分量の物質を吸引するステップと
から構成されることを特徴とする方法。
【請求項2】
前記誘導するステップは、前記器具のポートを前記表面に対して静止した関係に維持するステップを含んでおり、これにより、前記溶液が前記表面上に誘導される間、前記器具のポートは前記表面に対して静止した関係に維持される、請求項1に記載の方法。
【請求項3】
前記誘導するステップの後には、前記吸引するステップが実行される前に、予め選択された期間を経過させるステップが続き、これにより、前記表面から前記物質が吸引される前に、前記予め選択された期間の継続時間の間、前記溶液は前記表面の前記物質と相互作用することが可能である、請求項1に記載の方法。
【請求項4】
前記吸引するステップは、前記溶液を前記表面に誘導するために用いた前記器具で実行される、請求項1に記載の方法。
【請求項5】
前記吸引するステップでは、前記表面の前記物質の一分量の吸引が、前記溶液の前記表面への誘導が前記器具の前記ポートを通じて行われたそのポートを通じて達成される、請求項1に記載の方法。
【請求項6】
前記器具を位置決めするステップでは、前記器具のポートは、前記分析対象の表面上の第1の位置に近接して位置決めされ、
前記誘導するステップの後には、
前記器具を、前記分析対象の表面上の第2の位置に移動させるステップと、
前記溶液の一分量を、前記採集器具のポートを通じて、前記表面上の前記第2の位置に誘導するステップと、
前記第1の位置で前記表面から一分量の物質が吸引される前に、前記器具のポートを前記第1の位置に近接させて再配置するステップと、が続く、請求項1に記載の方法。
【請求項7】
前記表面は、実質的にXY平面内に配置されていて、前記表面上に、そこからの試料の採集が所望される複数のXY座標位置が含まれており、
前記XY平面内で前記表面を前記採集器具に対して相対移動させることにより、前記採集器具のポートが、試料採集のために、前記表面上の前記XY座標位置の選択された1つに近接させて位置決めされる、ステップをさらに含み、
前記移動させるステップと制御するステップとが、互いに連携されることで、試料採集操作の特性が制御される、請求項1に記載の方法。
【請求項8】
前記誘導するステップでは、前記器具のポートと前記表面との間にジャンクションが形成されて、その形成されたジャンクションが、その後の前記吸引するステップで、前記表面から吸引される、請求項1に記載の方法。
【請求項9】
前記吸引するステップは、前記器具のポートにおける圧力を操作することにより達成される、請求項8に記載の方法。
【請求項10】
分析対象の表面上で試料を形成して、前記形成された試料をその表面から吸引するための方法であって、
ポートを備える採集器具であって、そのポートを通じて溶液が前記分析対象の表面上に誘導され、そのポートを通じて一分量の前記試料が前記表面から吸引される、採集器具を、提供するステップと、
前記採集器具のポートを、前記表面に近接させて、前記表面に合わせた試料採集位置に位置決めするステップと、
前記採集器具のポートを通じて前記表面上に前記溶液を誘導するステップであって、これにより、前記表面上に誘導された前記溶液が、前記表面を構成する物質と相互作用するようになる、ステップと、
前記採集器具を用いて、前記表面から一分量の物質を吸引するステップとから構成されることを特徴とする方法。
【請求項11】
前記誘導するステップは、前記採集器具のポートを前記表面に対して静止した関係に維持するステップを含んでおり、これにより、前記溶液が前記表面上に誘導される間、前記器具のポートは前記表面に対して静止した関係に維持される、請求項10に記載の方法。
【請求項12】
前記誘導するステップの後には、前記吸引するステップが実行される前に、予め選択された期間を経過させるステップが続き、これにより、前記表面から前記物質が吸引される前に、前記予め選択された期間の継続時間の間、前記溶液は前記表面の前記物質と相互作用することが可能である、請求項10に記載の方法。
【請求項13】
前記器具を位置決めするステップでは、前記器具のポートは、前記分析対象の表面上の第1の位置に近接して位置決めされ、
前記誘導するステップの後には、
前記器具を、前記分析対象の表面上の第2の位置に移動させるステップと、
前記溶液の一分量を、前記採集器具のポートを通じて、前記表面上の前記第2の位置に誘導するステップと、
前記第1の位置で前記表面からの一分量の物質が吸引される前に、前記器具のポートを前記第1の位置に近接させて再配置するステップと、が続く、請求項10に記載の方法。
【請求項14】
前記表面は、実質的にXY平面内に配置されていて、前記表面上に、そこからの試料の採集が所望される複数のXY座標位置が含まれており、
当該方法は、前記XY平面内で前記表面を前記採集器具に対して相対移動させるステップであって、これにより、前記採集器具のポートが、試料採集のために、前記表面上の前記XY座標位置の選択された1つに近接させて位置決めされる、ステップをさらに含み、
前記移動させるステップと制御するステップとが、互いに連携されることで、試料採集操作の特性が制御される、請求項10に記載の方法。
【請求項15】
前記誘導するステップでは、前記器具のポートと前記表面との間にジャンクションが形成されて、その形成されたジャンクションが、その後の前記吸引するステップで、前記表面から吸引される、請求項10記載の方法。
【請求項16】
前記吸引するステップは、前記器具のポートにおける圧力を操作することにより達成される、請求項15に記載の方法。
【請求項17】
試料を多く含む液体ジャンクションを形成して、分析対象の表面から吸引するための方法であって、
ポートを備える採集器具であって、さらに、それを通じて溶液が前記分析対象の表面上に誘導される1つの通路と、それを通じて一分量の試料が前記表面から吸引される別の通路とを備える、採集器具を、提供するステップと、
前記採集器具のポートを、試料採集のため、前記表面に対して所望の位置関係で位置決めするステップと、
前記採集器具の前記1つの通路により、溶液を、前記採集器具のポートを通じて前記表面上に誘導するステップであって、これにより、前記表面上に誘導された前記溶液が、前記表面を構成する物質と相互作用するようになって、そこで、試料を多く含む液体ジャンクションが形成される、ステップと、
前記採集器具の前記別の通路を通じて、前記表面から前記試料を多く含む液体ジャンクションを吸引するステップとから構成されることを特徴とする方法。
【請求項18】
前記吸引するステップは、前記器具のポートにおける圧力を操作することにより達成される、請求項17に記載の方法。
【請求項19】
前記吸引するステップは、霧化ガス流を用いて達成され、この霧化ガス流を制御することで、前記表面からの前記試料の吸引が制御される、請求項18に記載の方法。
【請求項20】
前記制御するステップでは、前記霧化ガスの流量が、低減された状態と上昇された状態との間で変更され、低減された状態のときには、前記採集器具のポートと前記表面との間で液体ジャンクションの形成が可能であり、上昇された状態のときには、前記形成されたジャンクションが前記表面から前記採集器具により吸引される、請求項19に記載の方法。
【請求項21】
前記表面は、実質的にXY平面内に配置されていて、前記表面上に、そこからの試料の採集が所望される複数のXY座標位置が含まれており、
当該方法は、前記試料の表面を前記採集器具に対して相対移動させるステップであって、これにより、前記採集器具のポートが、試料採集のために、前記表面上の前記XY座標位置の選択された1つに近接させて位置決めされる、ステップをさらに含み、
前記移動させるステップと制御するステップとが連携されることで、試料採集操作の特性が制御される、請求項20に記載の方法。
【請求項22】
試料を形成して、それを分析対象の表面から分析のために吸引する、表面サンプリングシステムであって、
ポート備える器具であって、そのポートを通じて溶液が前記分析対象の表面上に誘導され、そのポートを通じて一分量の試料が前記表面から吸引される、器具と、
前記器具のポートを前記分析対象の表面に近接させて位置決めする手段と、
前記器具のポートを通じて前記表面上に前記溶液を誘導する手段であって、これにより、前記表面上に誘導された前記溶液が、前記表面を構成する物質と相互作用するようになる、手段と、
前記器具のポートを通じて、前記表面から一分量の物質を吸引する手段とから構成されることを特徴とするシステム。
【請求項23】
前記吸引する手段は、前記器具のポートにおける圧力を操作することにより達成される、請求項22に記載のシステム。
【請求項24】
前記吸引する手段は、霧化ガス流を用いて達成され、
当該システムは、前記霧化ガス流を制御する手段をさらに有し、これにより前記霧化ガス流を制御することで、前記表面からの前記試料の吸引が制御される、請求項22に記載のシステム。
【請求項25】
前記制御する手段は、前記霧化ガスの流量を、低減された状態と上昇された状態との間で変更するように構成されており、低減された状態のときには、前記採集器具による前記表面からの試料の採集は行なわれず、上昇された状態のときには、前記採集器具により一分量の試料が前記表面から採集される、請求項24に記載のシステム。
【請求項26】
前記採集器具によりサンプリングされる前記表面は、実質的にXY平面内に配置されていて、前記採集器具からZ座標軸に沿って離間されており、
当該システムは、前記XY平面内で前記表面と前記採集器具のポートを互いに対して相対移動させる手段をさらに有し、これにより、前記表面に沿った複数のXY座標位置のうち任意の位置を、試料採集のために、前記ポートに近接させて位置決めすることができる、請求項22に記載のシステム。
【請求項27】
前記表面は、そこからの試料の採集が所望される複数のXY座標位置を含んでおり、
当該システムは、前記一分量の物質の吸引を、前記XY座標平面での前記表面に対する前記器具のポートの位置決めに連携させる手段をさらに有し、これにより、当該システムにより実行される試料採集操作の特性が制御される、請求項22に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【図6c】
【図6d】
【図6e】
【図6f】
【図6g】
【図6h】
【図7a】
【図7b】
【図7c】
【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【図6c】
【図6d】
【図6e】
【図6f】
【図6g】
【図6h】
【図7a】
【図7b】
【図7c】
【公表番号】特表2012−519847(P2012−519847A)
【公表日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−552947(P2011−552947)
【出願日】平成22年3月4日(2010.3.4)
【国際出願番号】PCT/US2010/000683
【国際公開番号】WO2010/101656
【国際公開日】平成22年9月10日(2010.9.10)
【出願人】(301006404)ユーティバトル・エルエルシイ (5)
【Fターム(参考)】
【公表日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成22年3月4日(2010.3.4)
【国際出願番号】PCT/US2010/000683
【国際公開番号】WO2010/101656
【国際公開日】平成22年9月10日(2010.9.10)
【出願人】(301006404)ユーティバトル・エルエルシイ (5)
【Fターム(参考)】
[ Back to top ]