
試料ホルダーおよび透過電子顕微鏡システム
【課題】透過電子顕微鏡において、広い範囲の観察が可能な試料ホルダーを提供する。
【解決手段】透過電子顕微鏡100は、試料支持部10が設けられた軸部20と、試料室における試料支持部10の位置を変える第1試料支持部移動機構30と、を含み、ステージ移動機構は、試料室における電子線の進行方向に対して交差する第1方向に試料支持部10を移動させ、ステージ移動機構による試料支持部10の第1方向の移動可能範囲は、第1距離であり、第1試料支持部移動機構30は、試料支持部10を、第1方向に、第1距離以下ずつ移動させ、第1試料支持部移動機構30による試料支持部10の第1方向の移動可能範囲は、第2距離であり、試料支持部10は、試料室において電子線を通過させるための開口部11を有し、開口部11の第1方向の大きさは、第1距離と第2距離との和以上である。
【解決手段】透過電子顕微鏡100は、試料支持部10が設けられた軸部20と、試料室における試料支持部10の位置を変える第1試料支持部移動機構30と、を含み、ステージ移動機構は、試料室における電子線の進行方向に対して交差する第1方向に試料支持部10を移動させ、ステージ移動機構による試料支持部10の第1方向の移動可能範囲は、第1距離であり、第1試料支持部移動機構30は、試料支持部10を、第1方向に、第1距離以下ずつ移動させ、第1試料支持部移動機構30による試料支持部10の第1方向の移動可能範囲は、第2距離であり、試料支持部10は、試料室において電子線を通過させるための開口部11を有し、開口部11の第1方向の大きさは、第1距離と第2距離との和以上である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料ホルダーおよび透過電子顕微鏡システムに関する。
【背景技術】
【0002】
透過電子顕微鏡(Transmission Electron Microscope;TEM)は、高い空間分解能で観察や分析を行うことが可能なため、微小領域の評価に用いられる。
【0003】
透過電子顕微鏡では、棒状の試料ホルダーを用いて、試料を試料室内に保持する(例えば、特許文献1参照)。透過電子顕微鏡で観察できる試料サイズは、一般的に、φ3mm程度に規定されている。透過電子顕微鏡には、試料ステージを高精度に移動させるためのステージ移動機構が設けられている。ステージ移動機構は、規定された試料サイズの範囲で試料を高精度に移動させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−66832号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような透過電子顕微鏡では、ステージ移動機構によって試料が移動できる範囲が、観察可能な範囲に対応している。したがって、このような透過電子顕微鏡では、ステージ移動機構によって試料が移動できる範囲よりも広い範囲の観察が困難であった。
【0006】
そのため、例えば、φ3mmよりも大きな試料を観察する場合、試料を規定されたサイズ以下に切断し、複数回に分けて観察するなどしなければならなかった。しかしながら、試料を切断すると、試料にダメージを与えてしまったり、試料の切断された部分の情報が失われてしまったりする場合がある。
【0007】
本発明は、以上のような問題点に鑑みてなされたものであり、本発明のいくつかの態様によれば、透過電子顕微鏡において、広い範囲の観察が可能な試料ホルダーおよび透過電子顕微鏡システムを提供することができる。
【課題を解決するための手段】
【0008】
(1)本発明に係る試料ホルダーは、
試料支持部を備え、透過電子顕微鏡の試料室における前記試料支持部の位置が、前記透過電子顕微鏡のステージ移動機構によって変更される試料ホルダーであって、
前記試料支持部が設けられた軸部と、
前記試料室における前記試料支持部の位置を変える第1試料支持部移動機構と、
を含み、
前記ステージ移動機構は、前記試料室における電子線の進行方向に対して交差する第1方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第1距離であり、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1方向に、前記第1距離以下ずつ移動させ、
前記第1試料支持部移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第2距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第1方向の大きさは、前記第1距離と前記第2距離との和以上である。
【0009】
このような試料ホルダーによれば、第1試料支持部移動機構が、試料支持部を、第1方向に移動させることができる。これにより、透過電子顕微鏡において、ステージ移動機構による試料支持部の第1方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、大きな試料を、切断せずに観察することができる。さらに、第1試料支持部移動機構は、試料支持部を、第1距離以下ずつ移動させることができる。これにより、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0010】
(2)本発明に係る試料ホルダーにおいて、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1距離ずつ移動させてもよい。
【0011】
このような試料ホルダーによれば、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0012】
(3)本発明に係る試料ホルダーにおいて、
さらに、前記試料室における前記試料支持部の位置を変える第2試料支持部移動機構を含み、
前記ステージ移動機構は、前記電子線の進行方向および前記第1方向に対して交差する第2方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第2方向の移動可能範囲は、第3距離であり、
前記第2試料支持部移動機構は、前記試料支持部を、前記第2方向に、前記第3距離以下ずつ移動させ、
前記第2試料支持部移動機構による前記試料支持部の前記第2方向の移動可能範囲は、第4距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第2方向の大きさは、前記第3距離と前記第4距離との和以上であってもよい。
【0013】
このような試料ホルダーによれば、第2試料支持部移動機構が、試料支持部を、第2方向に移動させることができる。これにより、透過電子顕微鏡において、ステージ移動機構による試料支持部の第2方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、より大きな試料を、切断せずに観察することができる。さらに、第2試料支持部移動機構は、試料支持部を、第2距離以下ずつ移動させることができる。これにより、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0014】
(4)本発明に係る試料ホルダーにおいて、
前記第2試料支持部移動機構は、前記試料支持部を、前記第3距離ずつ移動させてもよい。
【0015】
このような試料ホルダーによれば、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0016】
(5)本発明に係る透過電子顕微鏡システムは、
試料が配置される試料室を備えた透過電子顕微鏡と、
前記試料室に配置される試料支持部を備えた試料ホルダーと、
を含み、
前記透過電子顕微鏡は、前記試料室における前記試料支持部の位置を変更するステージ移動機構を有し、
前記ステージ移動機構は、前記試料室における電子線の進行方向に対して交差する第1方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第1距離であり、
前記試料ホルダーは、
前記試料支持部が形成された軸部と、
前記試料室における前記試料支持部の位置を変える第1試料支持部移動機構と、
を有し、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1方向に、前記第1距離以下ずつ移動させ、
前記第1試料支持部移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第2距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第1方向の大きさは、前記第1距離と前記第2距離との和以上である。
【0017】
このような透過電子顕微鏡システムによれば、試料ホルダーの第1試料支持部移動機構が、試料支持部を、第1方向に移動させることができる。これにより、透過電子顕微鏡において、ステージ移動機構による試料支持部の第1方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、大きな試料を、切断せずに観察することができる。さらに、第1試料支持部移動機構は、試料支持部を、第1距離以下ずつ移動させることができる。これにより、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0018】
(6)本発明に係る透過電子顕微鏡システムにおいて、
前記透過電子顕微鏡は、前記ステージ移動機構を制御するための制御部を有し、
前記制御部は、前記ステージ移動機構を制御して、前記試料支持部の位置を変更するステージ移動処理を行い、
前記試料支持部は、前記ステージ移動処理によって、前記第1試料支持部移動機構が前記試料支持部を移動させた方向とは反対方向に、前記第1試料支持部移動機構が前記試料支持部を移動させた距離だけ移動してもよい。
【0019】
このような透過電子顕微鏡システムによれば、第1試料支持部移動機構によって移動した試料支持部の移動分をキャンセルできる。
【0020】
(7)本発明に係る透過電子顕微鏡システムにおいて、
前記制御部は、前記第1試料支持部移動機構が前記試料支持部を移動させたタイミングに基づいて、前記ステージ移動処理を行ってもよい。
【0021】
このような透過電子顕微鏡システムによれば、例えば、第1試料支持部移動機構によって移動した試料支持部の移動分を、自動的にキャンセルできる。
【図面の簡単な説明】
【0022】
【図1】第1実施形態に係る試料ホルダーを模式的に示す側面図。
【図2】第1実施形態に係る試料ホルダーを模式的に示す断面図。
【図3】第1実施形態に係る試料ホルダーの試料支持部を模式的に示す斜視図。
【図4】第1実施形態に係る試料ホルダーの試料支持部移動機構を構成するカムを模式的に示す斜視図。
【図5】第1実施形態に係る試料ホルダーの動作を説明するための図。
【図6】第1実施形態に係る透過電子顕微鏡システムの構成を説明するための図。
【図7】第1実施形態に係る透過電子顕微鏡に、第1実施形態に係る試料ホルダーを装着した状態を示す模式図。
【図8】第1実施形態に係る透過電子顕微鏡システムの動作を説明するための図。
【図9】第1実施形態に係る透過電子顕微鏡の表示部および操作部を模式的に示す図。
【図10】第2実施形態に係る試料ホルダーを模式的に示す断面図。
【図11】第2実施形態に係る透過電子顕微鏡システムの動作を説明するための図。
【発明を実施するための形態】
【0023】
以下、本発明の好適な実施形態について詳細に説明する。なお、以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0024】
1.第1実施形態
1.1. 試料ホルダー
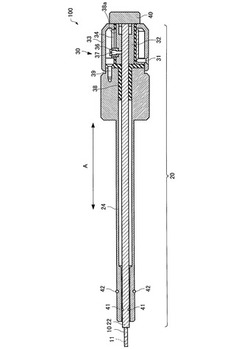
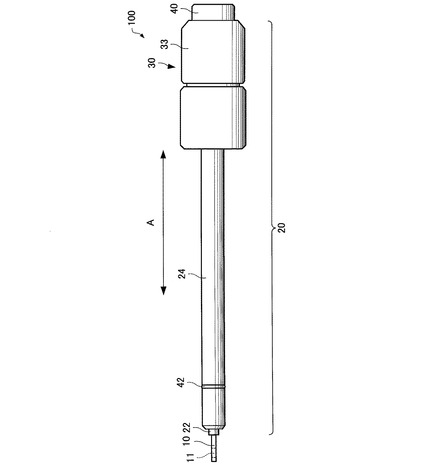
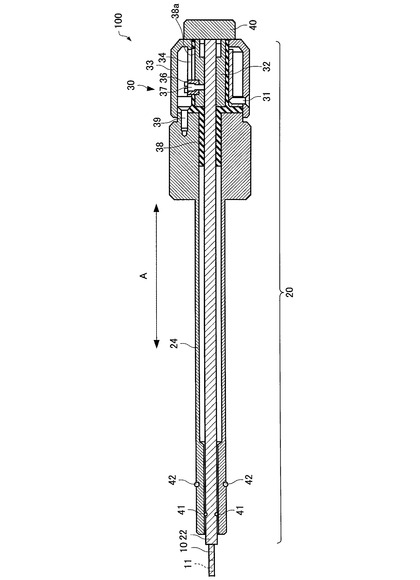
まず、第1実施形態に係る試料ホルダーについて図面を参照しながら説明する。図1は、第1実施形態に係る試料ホルダー100を模式的に示す側面図である。図2は、試料ホルダー100を模式的に示す断面図である。
【0025】
試料ホルダー100は、透過電子顕微鏡用の試料ホルダーである。試料ホルダー100は、ポールピースの横から試料を挿入するサイドエントリー式の試料ホルダーである。試料ホルダー100は、一般的な試料サイズ(φ3mm)よりも、大きなサイズ(例えばφ6mm以上)の試料を保持できるように構成されている。試料ホルダー100は、図1および図2に示すように、試料支持部(試料ステージ)10と、軸部20と、試料支持部移動機構30と、を含む。
【0026】
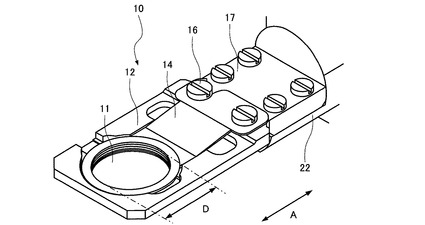
図3は、試料支持部10を模式的に示す斜視図である。試料支持部10は、軸部20の先端に設けられている。試料支持部10は、開口部11と、支持板12と、板ばね14と、板ばね固定部17と、を含んで構成されている。
【0027】
開口部11は、支持板12に形成されている。開口部11は、透過電子顕微鏡の試料室において、電子線を通過させるための貫通孔である。図示の例では、開口部11の平面形状(電子線の入射方向からみたときの形状)は円であるが、その形状は特に限定されず、例えば、楕円、多角形であってもよい。開口部11の軸方向(試料ホルダー100の軸に沿う方向)Aの大きさDは、後述する透過電子顕微鏡のステージ移動機構による試料支持部10の軸方向Aの移動可能範囲(第1距離)と、試料支持部移動機構30の軸方向Aの移動可能範囲(第2距離)との和以上である。具体的には、開口部11の軸方向Aの大きさDは、6mm程度である。図示の例では、開口部11の平面形状は、円であり、開口部11の大きさDは、当該円の直径である。
【0028】
支持板12は、移動シャフト22の先端に固定されている。支持板12には、開口部11の周囲に沿って窪みが形成されている。
【0029】
板ばね14は、板ばね固定部17にビス16によって固定されている。板ばね14は、支持板12の開口部11と同じ形状および同じ大きさの貫通孔が形成されている。ばね固定部17は、移動シャフト22に固定されている。
【0030】
試料(図示しない)は、支持板12に形成された開口部11の周囲の窪みに収容され、板ばね14によって押さえつけられることによって固定される。透過電子顕微鏡の試料室において、電子線は、開口部11、試料、および板ばね14の貫通孔を通過する。
【0031】
なお、ここでは、試料支持部10が、試料を、板ばね14によって固定する場合について説明したが、図示はしないが、試料支持部10は、例えば、試料を、ねじの締め付け等により固定してもよい。
【0032】
軸部20は、図1および図2に示すように、移動シャフト22と、筒体24と、を含んで構成されている。
【0033】
移動シャフト22は、軸方向Aに沿って延びる棒状の部材である。移動シャフト22の一方の端には、試料支持部10が設けられ、他方の端は、移動シャフト固定部40に接続されている。移動シャフト22は、筒体24の内側に収容されている。移動シャフト22と筒体24との間は、透過電子顕微鏡の試料室を真空に保つために、Oリング41で真空シールされている。移動シャフト22は、直動ガイド32によって直線的に移動可能に案内されている。移動シャフト22は、試料支持部移動機構30の動作によって軸方向Aに沿って移動する。移動シャフト22の移動に伴って試料支持部10が移動する。
【0034】
筒体24は、軸方向Aに沿って延びる筒状の部材であり、内部に移動シャフト22が移動可能に収容されている。筒体24の外面には、透過電子顕鏡の試料室を真空に保つためのOリング42が装着されている。
【0035】
試料支持部移動機構30は、図2に示すように、直動ガイド32と、移動用つまみ33と、カム34と、ローラ36と、ローラガイド38と、移動シャフト固定部40と、を含んで構成されている。
【0036】
直動ガイド32は、移動シャフト22を、軸方向Aに沿って直線的に移動可能に案内している。直動ガイド32には、ローラ36がネジ37によって固定されている。
【0037】
移動用つまみ33は、ネジ31によってカム34に固定されている。移動用つまみ33は、移動シャフト22を中心軸として回転可能である。
【0038】
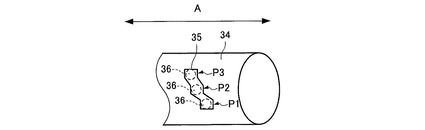
カム34は、円筒状の部材であり、内側には、直動ガイド32が収容されている。図4は、カム34を模式的に示す斜視図である。カム34には、図4に示すように、階段状のローラ案内孔35が設けられている。ローラ案内孔35は、ローラ36が位置P1、位置P2、位置P3間を移動できるように形成されている。図示の例では、位置P1は、移動シャフト固定部40側であり、位置P3は、試料支持部10側である。
【0039】
ローラ36は、ローラ案内孔35、およびローラガイド38の規制孔38aに挿入されている。
【0040】
ローラガイド38は、筒体24にネジ39によって固定されている。ローラガイド38には、貫通孔が形成されており、当該貫通孔には移動シャフト22が収容されている。また、ローラガイド38には、軸方向Aに沿って延びる規制孔38aが設けられている。この規制孔38aにローラ36が挿入されている。したがって、ローラ36の動きは、この規制孔38aによって規制される。すなわち、ローラ36は、軸方向Aに沿ってのみ移動可能である。
【0041】
移動シャフト固定部40には、移動シャフト22が接続されている。
【0042】
ここで、試料支持部移動機構30の動作について説明する。
【0043】
移動用つまみ33をまわすと、移動用つまみ33と一体となったカム34が回転して、カム34のローラ案内孔35に挿入されているローラ36が軸方向Aに沿って移動する。このローラ36の移動により、ローラ36に接続されている直動ガイド32が移動して、移動シャフト固定部40を軸方向Aに沿って移動させる。移動シャフト固定部40が移動することで、移動シャフト22が移動し、移動シャフト22の先端部に設けられた試料支持部10が軸方向Aに沿って移動する。
【0044】
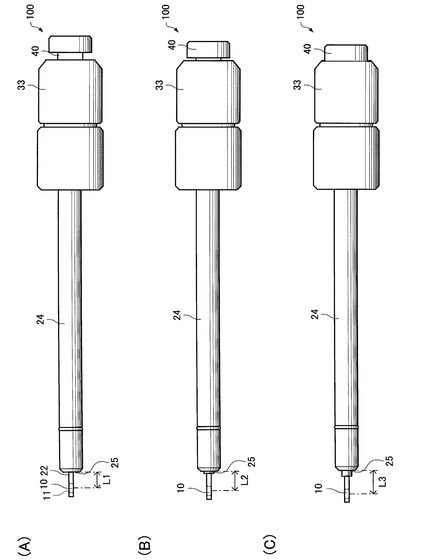
図5は、試料ホルダー100の動作を説明するための図である。図5(A)は、ローラ36がローラ案内孔35の位置P1(図4参照)に位置している場合の試料ホルダー100を模式的に示す側面図である。図5(B)は、ローラ36がローラ案内孔35の位置P2に位置している場合の試料ホルダー100を模式的に示す側面図である。図5(C)は、ローラ36がローラ案内孔35の位置P3に位置している場合の試料ホルダー100を模式的に示す側面図である。
【0045】
図5(A)に示すように、ローラ36が位置P1に位置するとき、試料支持部10(開口部11の中心)は、筒体24の先端25(試料支持部10側の端部)から距離L1離れている。ここで、距離L1は、軸方向Aにおける、試料支持部10と筒体24の先端25との間の距離である。以下、距離L2,L3も同様である。移動用つまみ33をまわし、ローラ36を位置P1から位置P2に移動させると、図5(B)に示すように、試料支持部10は、筒体24の先端25から距離L1よりも大きい距離L2離れる。さらに、移動用つまみ33をまわし、ローラ36を位置P2から位置P3に移動させると、図5(C)に示すように、試料支持部10は、筒体24の先端25から距離L2よりも大きい距離L3離れる。すなわち、図示の例では、距離L1<距離L2<距離L3である。
【0046】
このように、試料支持部10は、試料支持部移動機構30によって、軸方向Aに沿って移動することができる。
【0047】
なお、試料ホルダー100は、移動用つまみ33を回転させるための移動用つまみ駆動部(図示しない)を有していてもよい。移動用つまみ駆動部は、例えば、移動用つまみ33を回転させるためのモーターを有し、このモーターを制御することによって、移動用つまみ33を回転させてもよい。
【0048】
1.2. 透過電子顕微鏡システム
(1)透過電子顕微鏡システムの構成
次に、本実施形態に係る透過電子顕微鏡システムの構成について図面を参照しながら説明する。本実施形態に係る透過電子顕微鏡システムは、本実施形態に係る試料ホルダーを含んで構成されている。
【0049】
図6は、本実施形態に係る透過電子顕微鏡システム200の構成を説明するための図である。ここでは、透過電子顕微鏡が、透過型電子顕微鏡(TEM)の構成を有する場合について説明するが、電子顕微鏡は、走査透過型電子顕微鏡(Scanning Transmission Electron Microscope;STEM)の構成を有していてもよい。なお、本実施形態に係る透過電子顕微鏡は、図6の構成要素(各部)の一部を省略した構成としてもよい。
【0050】
透過電子顕微鏡システム1000は、図6に示すように、本実施形態に係る試料ホルダー100と、透過電子顕微鏡200と、で構成されている。
【0051】
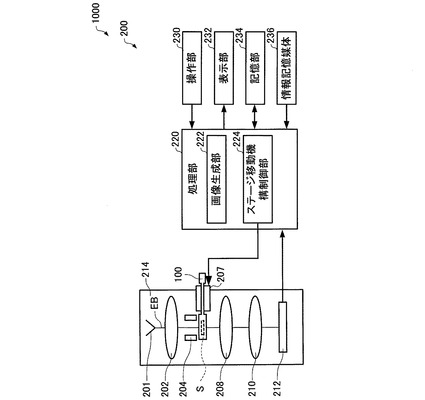
透過電子顕微鏡200は、電子線源201と、照射レンズ系202と、偏向器204と、ステージ移動機構207と、対物レンズ208と、投影レンズ210と、検出器212と、鏡筒214と、処理部220と、操作部230と、表示部232と、記憶部234と、情報記憶媒体236と、を含んで構成されている。
【0052】
電子線源201、照射レンズ系202、偏向器204、対物レンズ208、投影レンズ210、検出器212は、鏡筒214の内部に収容されている。鏡筒214の内部は、排気装置(図示省略)によって減圧排気されている。
【0053】
電子線源201は、陰極から放出された電子を陽極で加速し電子線を放出する。電子線源201の例として、公知の電子銃を挙げることができる。
【0054】
照射レンズ系202は、電子線源201の後段に配置されている。照射レンズ系202は、複数の集束レンズ(図示省略)を含んで構成されている。照射レンズ系202は、試料Sに照射される電子線(入射電子線)の収束角を調整する。
【0055】
偏向器204は、照射レンズ系202の後段に配置されている。偏向器204は、複数の偏向コイルと、当該複数の偏向コイルに流れる電流量を制御するための電流制御部(図示省略)とを有する。偏向器204は、電流制御部で各偏向コイルに流れる電流を制御することにより入射電子線を2次元的に偏向させる。
【0056】
試料Sは、偏向器204の後段の試料室に配置される。試料ホルダー100は、試料室において、試料Sを支持している。試料ホルダー100に支持された試料Sは、ステージ移動機構207によって、水平方向や垂直方向に精度よく移動する。ステージ移動機構207の詳細については、後述する。
【0057】
対物レンズ208は、試料Sの後段に配置されている。対物レンズ208は、試料Sを透過した電子線を結像させる。投影レンズ210は、対物レンズ208の後段に配置されている。投影レンズ210は、対物レンズ208によって結像された像をさらに拡大し、検出器212上に結像させる。
【0058】
検出器212は、投影レンズ210の後段に配置されている。検出器212は、投影レンズ210によって結像された透過電子顕微鏡像を検出する。検出器212の例として、2次元的に配置されたCCD(Charge Coupled Device)を受光部とするCCDカメラを挙げることができる。検出器212が検出した透過電子顕微鏡像の像情報は、処理部220に出力される。
【0059】
処理部220は、例えば、取得した像情報から透過電子顕微鏡像を生成する画像生成部222を有している。また、処理部220は、ステージ移動機構207を制御するためのステージ移動機構制御部224を有している。
【0060】
ステージ移動機構制御部224は、ステージ移動機構207を制御して、試料支持部10の位置を変更するステージ移動処理を行う。試料支持部10は、後述するように、ステージ移動処理によって、試料支持部移動機構30が試料支持部10を移動させた方向とは反対方向に、試料支持部移動機構30が試料支持部10を移動させた距離だけ移動する。
【0061】
ステージ移動機構制御部224は、試料支持部移動機構30が試料支持部10を移動させたタイミングに基づいて、ステージ移動処理を行う。
【0062】
操作部230は、ユーザーが操作情報を入力するためのものであり、入力された操作情報を処理部220に出力する。操作部230の機能は、キーボード、マウス、タッチパネル型ディスプレイなどのハードウェアにより実現することができる。
【0063】
表示部232は、処理部220によって生成された画像を表示するものであり、その機能は、LCD、CRTなどにより実現できる。表示部232は、処理部220により生成された透過電子顕微鏡像を表示する。
【0064】
記憶部234は、処理部220のワーク領域となるもので、その機能はRAMなどにより実現できる。情報記憶媒体236(コンピュータにより読み取り可能な媒体)は、プログラムやデータなどを格納するものであり、その機能は、光ディスク(CD、DVD)、光磁気ディスク(MO)、磁気ディスク、ハードディスク、或いはメモリ(ROM)などにより実現できる。処理部220は、情報記憶媒体236に格納されるプログラムに基づいて本実施形態の種々の処理を行う。情報記憶媒体236には、処理部220の各部としてコンピューターを機能させるためのプログラムを記憶することができる。
【0065】
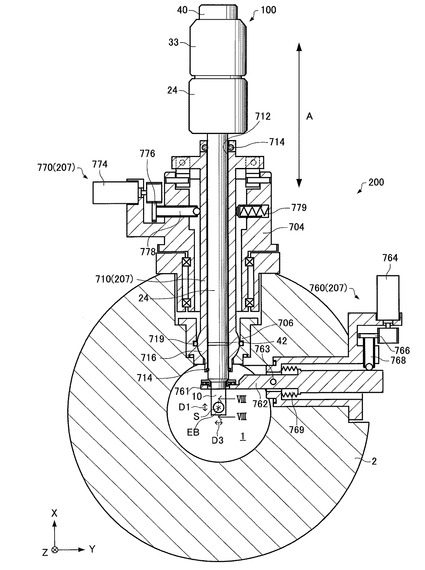
図7は、透過電子顕微鏡200に、試料ホルダー100を、装着した状態を示す模式図である。図7では、便宜上、透過電子顕微鏡200をXY平面における断面図で示している。
【0066】
試料ホルダー100は、図7に示すように、試料室1に試料支持部10が位置するように、透過電子顕微鏡200に装着される。図示の例では、試料ホルダー100は、軸方向AがX軸方向に沿うように装着される。ここで、Z軸方向は、試料室1を通過する電子線の進行方向である。すなわち、電子線の光軸EBは、Z軸方向に沿う方向である。また、X軸、Y軸、Z軸は、互いに直交している。なお、ここでは、X軸、Y軸、Z軸が互いに直交している場合について説明するが、X軸,Y軸,Z軸は、例えば、互いに直交せずに、互いに交差していてもよい。試料ホルダー100では、試料室1における試料支持部10の位置が、ステージ移動機構207によって変更される。
【0067】
ステージ移動機構207は、管状部材(以下「シフター」ともいう)710と、X移動機構760と、Y移動機構770と、を含んで構成されている。
【0068】
試料室1は、図7に示すように、壁部2によって囲まれている。シフター10は、壁部2を貫通するように設けられたシフター支持部材704によって支持されている。シフター710は、試料室1に連通する孔712を有しており、試料ホルダー100は、この孔712に移動可能に装着されている。X移動機構760は、試料支持部10を、X軸方向に沿って移動させる。Y移動機構70は、シフター710を回動させることにより試料支持部10をY軸方向に沿って移動させる。
【0069】
透過電子顕微鏡200では、試料S(試料支持部10)を試料室1の所望の位置へ移動および静止させることができる。具体的には、透過電子顕微鏡200では、試料ホルダー100によって支持された試料Sを、移動機構760,770によってX,Y軸方向に沿って直線的に移動させることができる。また、透過電子顕微鏡200は、Z移動機構(図示しない)によって、Z軸方向に沿って試料Sを直線的に移動させてもよいし、傾斜機構(図示しない)によって、試料SをX軸周りに傾斜させてもよい。
【0070】
試料室1は、減圧状態に維持可能である。試料室1は、公知のポンプ(図示しない)によって真空排気されることにより減圧状態に維持される。試料室1には、試料ホルダー100によって試料Sが導入される。そして、試料室1において、試料Sに電子線が照射される。
【0071】
シフター支持部材704は、壁部2を貫通する円筒状の部材である。シフター支持部材704には、シフター710が挿入されている。シフター支持部材704の試料室1側には、球面軸受部706が設けられている。球面軸受部706は、その内面が球面状に形成されている。
【0072】
シフター710は、管状の部材であり、試料室1に連通する孔712を有している。図示の例では、孔712は、X軸方向に貫通している。孔712の形状は、例えば、円柱状であり、孔712の中心軸(図示しない)は、X軸と平行である。孔712には、試料ホルダー100が装着される。これにより、試料ホルダー100は、Y軸方向およびZ軸方向の移動が規制され、X軸方向に直線的に移動可能となる。試料ホルダー100は、試料ホルダー100の軸方向AとX軸方向とが、互いに平行となるように、孔712に装着される。シフター710の内側には、試料ホルダー100を支持するベアリング714が設けられている。ベアリング714は、シフター710の両端部(孔712の開口付近)にそれぞれ設けられている。ベアリング714は、試料ホルダー100のX軸方向への移動を円滑にすることができる。
【0073】
シフター710は、試料室1側の端部に、球面部716を有する。球面部716の表面は、中心が孔712の中心軸上にある球面状に形成されている。球面部716は、球面軸受部706により支持される。球面軸受部706は、その内面が球面部716の表面に接するように形成されている。これにより、球面部716は、球面軸受部706に摺動可能に支持される。そのため、シフター710は、球面部716の中心を回動中心として、回動することができる。球面部716と球面軸受部706との間には、試料室1を気密に封止するためのOリング719が設けられている。
【0074】
X移動機構760およびY移動機構770は、試料室1における試料支持部10の位置を変えることができる。すなわち、X移動機構760およびY移動機構770は、試料Sを試料室1の所望の位置へ移動および静止させるように、試料ホルダー100を動作させる。
【0075】
X移動機構760は、試料ホルダー100をX軸方向に沿って移動させる。X移動機構760は、図7に示すように、レバー762と、Xモーター764と、平歯車対766と、X送りねじ768と、を含んで構成されている。
【0076】
レバー762は、軸763を回転中心とするてこ式のレバーである。レバー762の試料室1側の端部には、ベアリング761が設けられ、ベアリング761を介して試料ホルダー100(筒体24)を支持している。ベアリング761は、YZ平面内を転動することができる。そのため、試料S(試料支持部10)のY軸方向への移動が円滑になる。試料ホルダー100には、試料室1と大気との圧力差により、−X軸方向の力が働いている。そのため、試料ホルダー100は、この力によってレバー762(ベアリング761)に押しつけられている。レバー762の試料室1側とは反対側の端部には、X送りねじ768が接している。
【0077】
X送りねじ768は、Xモーター764の回転によって、X軸方向に直線的に移動する。このX送りねじ768の移動により、レバー762は、軸763を回転中心として回転し、試料支持部10をX軸方向に直線的に移動させる。平歯車対766は、Xモーター764の回転をX送りねじ768に伝達することができる。ベローズ769は、試料室1を減圧状態に保ちつつ、レバー762の移動を円滑にすることができる。
【0078】
X移動機構760による試料支持部10の移動可能範囲(第1距離)は、電子線の光軸EBを中心とした距離D1の範囲である。なお、X移動機構760による試料支持部10の移動可能範囲とは、X移動機構760によって、試料支持部10が、X軸方向に沿って移動することができる範囲(距離)をいう。具体的には、X移動機構760による試料支持部10の移動可能範囲(距離D1)は、例えば、2mmである。
【0079】
Y移動機構770は、Yモーター774と、平歯車対776と、Y送りねじ778と、戻しばね779と、を含んで構成されている。Y送りねじ778の先端は、図7に示すように、シフター710の−Y軸方向側の外周面に接している。シフター710の+Y軸方向側の外周面には、戻しばね779が接している。シフター710は、戻しばね779によって、−Y軸方向に付勢されている。Y送りねじ778は、Yモーター774の回転によって、Y軸方向に直線的に移動する。このY送りねじ778の移動により、シフター710は、球面部716の中心を回動中心として回動する。これにより、試料支持部10をY軸方向に直線的に移動させることができる。平歯車対776は、Yモーター774の回転をY送りねじ778に伝達することができる。
【0080】
Y移動機構770による試料支持部10の移動可能範囲(第3距離)は、電子線の光軸EBを中心とした距離D3の範囲である。Y移動機構770による試料支持部10の移動可能範囲とは、Y移動機構770によって、試料支持部10が、Y軸方向に沿って移動することができる範囲(距離)をいう。具体的には、Y移動機構770による試料支持部10の移動可能範囲(距離D3)は、例えば、2mmである。
【0081】
なお、透過電子顕微鏡200は、さらに、試料支持部10をZ軸方向に移動させるZ移動機構(図示せず)を有していてもよい。Z移動機構は、Y移動機構770と同様の構成であってもよい。
【0082】
(2) 透過電子顕微鏡システムの動作
次に、本実施形態に係る透過電子顕微鏡システム1000の動作について図面を参照しながら説明する。本実施形態に係る透過電子顕微鏡システム1000は、試料ホルダー100の試料支持部移動機構30、および透過電子顕微鏡200のステージ移動機構207(X移動機構760)によって試料支持部10(試料S)を移動させて、試料Sの観察を行う。
【0083】
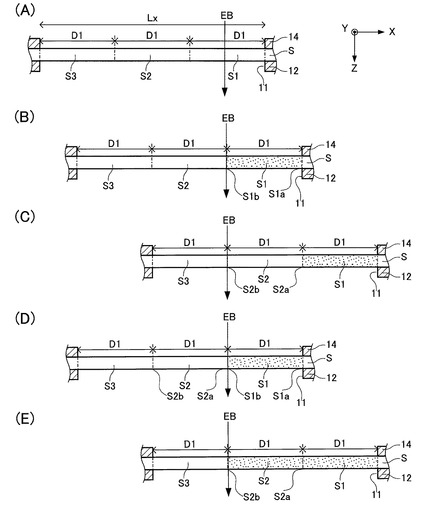
図8は、本実施形態に係る透過電子顕微鏡システム1000の動作を説明するための図である。なお、図8は、試料ホルダー100に支持された試料Sを模式的に示す断面図であり、図7のVIII−VIII線断面図である。以下、図6および図7に示す透過電子顕微鏡システム1000および図8に示す試料Sを参照しながら説明する。
【0084】
図8(A)に示すように、試料Sは、試料室1内に試料支持部10に支持された状態で導入される。試料ホルダー100は、図5(A)に示すように、ローラ36がローラ案内孔35の位置P1(図4参照)に位置している状態である。
【0085】
ここで、試料支持部移動機構30は、試料支持部10を、X軸方向に、距離D1ずつ移動させるように設定されている。距離D1は、X移動機構760による試料支持部10の移動可能範囲であり、例えば、2mmである。すなわち、図5に示す距離L1、L2、L3は、|L2−L1|=|L3−L2|=D1の関係を有する。
【0086】
また、試料支持部移動機構30による試料支持部10の移動可能範囲(第2距離)は、図示の例では、距離2×D1である。なお、試料支持部移動機構30による試料支持部10の移動可能範囲とは、試料支持部移動機構30の動作によって、試料支持部10が、X軸方向(軸方向A)に沿って移動することができる範囲(距離)をいう。具体的には、試料支持部移動機構30による試料支持部10の移動可能範囲(第2距離)は、例えば、4mm(2×2mm)である。
【0087】
図8に示す、試料Sの観察可能な領域のX軸方向の大きさLxは、X移動機構760による試料支持部10の移動可能範囲(距離D1)よりも大きい。図示の例では、試料Sの大きさLxは、X移動機構760による試料支持部10の移動可能範囲(距離D1)と、試料支持部移動機構30による試料支持部10の移動可能範囲(距離2×D1)との和、すなわち、距離3×D1である。具体的には、試料Sの大きさLxは、例えば、6mm(3×2mm)である。図示の例では、便宜上、試料Sを、3つの領域(第1領域S1,第2領域S2,第3領域S3)に分けて示している。各領域S1,S2,S3のX軸方向の大きさは、距離D1である。
【0088】
この試料Sの大きさLxに対応して、試料支持部10の開口部11のX軸方向の大きさは、試料Sの大きさLx以上である。図示の例では、開口部11のX軸方向の大きさは、試料Sの大きさLxと同じである。具体的には、開口部11のX軸方向の大きさは、例えば、6mm以上である。このように開口部11が大きいため、大きな試料Sに対して、広い範囲の観察ができる。
【0089】
図8(B)に示すように、透過電子顕微鏡200のX移動機構760を用いて、試料Sの第1領域S1の観察を行う。具体的には、X移動機構760を用いて試料支持部10を移動させながら、第1領域S1の+X軸方向側の端部S1aから第1領域S1の−X軸方向側の端部S1bまで観察を行う。したがって、第1領域S1の観察終了時には、電子線の光軸EBは、端部S1bに位置する。
【0090】
図8(C)に示すように、試料ホルダー100の試料支持部移動機構30によって、試料支持部10を移動させる。本工程において、試料支持部移動機構30は、図8(C)に示すように、試料支持部10を、+X軸方向に、距離D1移動させる。具体的には、例えば、ユーザーが移動用つまみ33をまわすことによって、ローラ36の位置を位置P1から位置P2に変える(図4参照)。これにより、試料ホルダー100は、図5(B)に示すローラ36がローラ案内孔35の位置P2に位置している状態となる。したがって、試料支持部10を、+X軸方向に、移動させることができる。この結果、電子線の光軸EBは、試料Sの第2領域S2の−X軸方向側の端部S2bに位置する。
【0091】
本工程は、試料ホルダー100が透過電子顕微鏡200に装着された状態で行われる。なお、本工程は、試料ホルダー100を透過電子顕微鏡200から取り外した状態で行われてもよい。
【0092】
図8(D)に示すように、試料支持部10を、電子線の光軸EBが第2領域S2の+X軸方向側の端部S2a(第1領域S1の端部S1b)に位置するように移動させる。具体的には、透過電子顕微鏡200のステージ移動機構制御部224が、X移動機構760を制御して、試料支持部10の位置を変更するステージ移動処理を行う。このステージ移動処理により、X移動機構760が、試料支持部10を、図8(C)に示す工程で試料支持部移動機構30が試料支持部10を移動させた方向(+X軸方向)とは反対方向(−X軸方向)に、試料支持部移動機構30が移動させた距離(距離D1)だけ、移動させる。すなわち、ステージ移動処理によって、試料支持部10は、−X軸方向に、距離D1だけ移動する。これにより、図8(D)に示すように、電子線の光軸EBは、第2領域S2の+X軸方向側の端部S2a(第1領域S1の端部S1b)に位置する。すなわち、図8(C)工程において、試料支持部移動機構30によって移動した試料支持部10の移動分がキャンセルされる。
【0093】
なお、ステージ移動機構制御部224は、試料支持部移動機構30が試料支持部10を移動させたタイミングに基づいて、ステージ移動処理を行う。具体的には、試料ホルダー100の移動用つまみ33をまわすと、これに連動して信号を出力する信号出力部(図示しない)が信号を出力し、この信号を受けてステージ移動機構制御部224がステージ移動処理を行ってもよい。
【0094】
また、例えば、移動用つまみ33をまわした後に、ユーザーが透過電子顕微鏡システム1000に設けられたボタンを押すことで、ステージ移動機構制御部224がステージ移動処理を行ってもよい。図9は、表示部232および操作部230を模式的に示す図である。当該ボタンは、例えば、図9に示すように、表示部232に表示されたGUIのボタンSWであってもよい。操作部230によって、ボタンSWをクリックすることで、ステージ移動機構制御部224がステージ移動処理を開始してもよい。
【0095】
図8(E)に示すように、透過電子顕微鏡200のX移動機構760を用いて、試料Sの第2領域S2の観察を行う。具体的には、X移動機構760を用いて試料支持部10を移動させながら、第2領域S2の+X軸方向側の端部S2aから第2領域S2の−X軸方向側の端部S2bまで観察を行う。したがって、第2領域S2の観察終了時には、電子線の光軸EBは、第2領域S2の端部S2bに位置する。
【0096】
図示はしないが、試料Sの第3領域S3に対しても、領域S1,S2と同様に、試料支持部移動機構30、X移動機構760、およびステージ移動機構制御部224を用いて観察を行う。
【0097】
以上の工程により、試料Sの第1領域S1から第3領域S3まで連続した観察を行うことができる。
【0098】
本実施形態に係る試料ホルダー100および透過電子顕微鏡システム1000は、例えば、以下の特徴を有する。
【0099】
本実施形態に係る試料ホルダー100によれば、試料支持部移動機構30が、試料支持部10を、X軸方向に、距離D1ずつ移動させることができる。ここで、距離D1は、X移動機構760による試料支持部10のX軸方向の移動可能範囲である。これにより、透過電子顕微鏡において、X移動機構760による試料支持部10のX軸方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、大きな試料を、切断せずに観察することができる。
【0100】
例えば、試料ホルダーが試料支持部移動機構を有さない場合、透過電子顕微鏡では、試料支持部の移動可能範囲は、ステージ移動機構によって移動可能な範囲に制限される。すなわち、観察可能な範囲は、ステージ移動機構によって移動可能な範囲に制限される。本実施形態によれば、試料ホルダー100が試料支持部移動機構30を有するため、X移動機構760(ステージ移動機構207)によって移動可能な範囲(距離D1)よりも広い範囲の観察ができる。
【0101】
具体的には、試料ホルダー100によれば、透過電子顕微鏡200において、X移動機構760による試料支持部10のX軸方向の移動可能範囲(第1距離D1)と、試料支持部移動機構30による試料支持部10のX軸方向の移動可能範囲(第2距離)との和の範囲で観察ができる。
【0102】
また、試料支持部移動機構30は、試料支持部10を、距離D1ずつ移動させることができる。これにより、図8に示すように、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0103】
また、試料支持部移動機構30は、上述したように、例えば、透過電子顕微鏡200のX移動機構760と比べて、簡易な構成で実現できる。
【0104】
透過電子顕微鏡システム1000によれば、ステージ移動機構制御部224が、X移動機構760を制御して、試料支持部10の位置を変更するステージ移動処理を行うことができる。ステージ移動処理では、X移動機構760が、試料支持部10を、試料支持部移動機構30が試料支持部10を移動させた方向とは反対方向に、試料支持部移動機構30が移動させた距離だけ、移動させることができる。これにより、試料支持部移動機構30によって移動した試料支持部10の移動分をキャンセルできる。
【0105】
透過電子顕微鏡システム1000によれば、ステージ移動機構制御部224は、試料支持部移動機構30が試料支持部10を移動させたタイミングに基づいて、ステージ移動処理を行うことができる。これにより、例えば、試料支持部移動機構30による試料支持部10の移動分を、自動的にキャンセルできる。
【0106】
2. 第2実施形態
2.1. 試料ホルダー
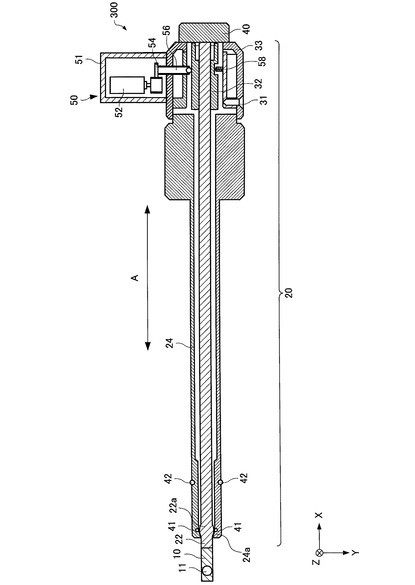
次に、第2実施形態に係る試料ホルダーについて説明する。図10は、第2実施形態に係る試料ホルダー300を模式的に示す断面図である。以下、第2実施形態に係る試料ホルダー300において、上述した試料ホルダー100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0107】
試料ホルダー100の例では、図2に示すように、試料支持部移動機構30(以下、「第1試料支持部移動機構30」ともいう)が、軸方向Aに、試料支持部10を移動させた。これに対して、試料ホルダー300の試料支持部移動機構50(以下、「第2試料支持部移動機構50」ともいう)は、電子線の進行方向および軸方向Aと直交する方向(第2方向)に、試料支持部10を移動させる。図示の例では、電子線の進行方向は、Z軸方向である。また、軸方向Aは、X軸方向である。したがって、第2試料支持部移動機構50が試料支持部10を移動させる方向(第2方向)は、Y軸方向である。
【0108】
試料ホルダー200では、移動シャフト22には、先端部近傍に球面部22aが設けられている。球面部22aの表面は、球面状に形成されている。また、筒体24には、球面軸受部24aが設けられている。球面軸受部24aは、その内面が球面状に形成されている。球面部22aは、球面軸受部24aにより支持される。
【0109】
第2試料支持部移動機構50は、モーター52と、平歯車対54と、送りねじ56と、戻しばね58と、を含んで構成されている。モーター52および平歯車対54は、収容部51に収容されている。
【0110】
送りねじ56の先端は、図10に示すように、直動ガイド32の−Y軸方向側の外周面に接している。直動ガイド32の+Y軸方向側の外周面には、戻しばね58が接している。直動ガイド32は、戻しばね58によって、−Y軸方向に付勢されている。
【0111】
送りねじ56は、モーター52の回転によって、Y軸方向に直線的に移動する。平歯車対54は、モーター52の回転を送りねじ56に伝達することができる。この送りねじ56の移動により、直動ガイド32は、Y軸方向に移動する。直動ガイド32の移動に伴って、移動シャフト22は、球面部22aの中心を回動中心として回動する。これにより、試料支持部10をY軸方向に直線的に移動させることができる。
【0112】
2.2. 透過電子顕微鏡システム
次に、第2実施形態に係る透過電子顕微鏡システムについて説明する。第2実施形態に係る透過電子顕微鏡システムは、第2実施形態に係る試料ホルダー300と、透過電子顕微鏡と、を含む。なお、第2実施形態に係る透過電子顕微鏡システムにおいて、透過電子顕微鏡の構成は、図6および図7に示す透過電子顕微鏡200の構成と同様である。
【0113】
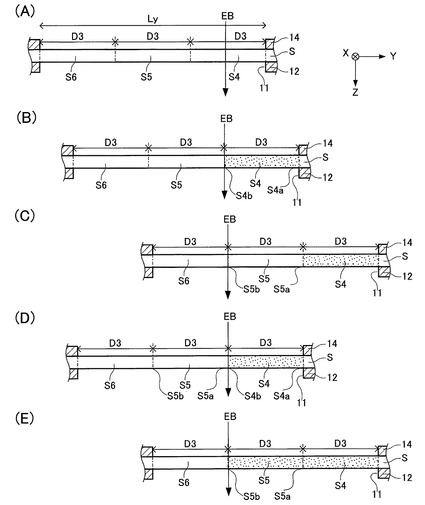
図11は、本実施形態に係る透過電子顕微鏡システムの動作を説明するための図である。なお、図11(A)〜(E)は、試料室1における試料SのYZ断面を模式的に示す断面図である。
【0114】
図11(A)に示すように、試料Sは、試料室1内に試料支持部10に支持された状態で導入される。
【0115】
ここで、第2試料支持部移動機構50は、試料支持部10を、Y軸方向に沿って距離D3ずつ移動させる。距離D3は、図7に示すように、Y移動機構770による試料支持部10の移動可能範囲であり、例えば、2mmである。
【0116】
また、第2試料支持部移動機構50による試料支持部10の移動可能範囲(第4距離)は、図11の例では、2×D3である。なお、第2試料支持部移動機構50による試料支持部10の移動可能範囲とは、第2試料支持部移動機構50によって、試料支持部10が、Y軸方向に沿って移動することができる範囲(距離)をいう。具体的には、第2試料支持部移動機構50による試料支持部10の移動可能範囲(第4距離)は、例えば、4mm(2×2mm)である。
【0117】
図11に示す、試料Sの観察可能な領域のY軸方向の大きさLyは、Y移動機構770による試料支持部10の移動可能範囲(距離D3)よりも大きい。図示の例では、試料Sの大きさLyは、Y移動機構770による試料支持部10の移動可能範囲(距離D3)と、第2試料支持部移動機構50による試料支持部10の移動可能範囲(距離2×D3)との和、すなわち、距離3×D3である。具体的には、試料Sの大きさLxは、例えば、6mm(3×2mm)である。図示の例では、便宜上、試料Sを、3つの領域(第4領域S4,第5領域S5,第6領域S6)に分けて示している。各領域S4,S5,S6のY軸方向の大きさは、距離D3である。
【0118】
この試料Sの大きさLyに対応して、試料支持部10の開口部11のY軸方向の大きさは、試料Sの大きさLy以上である。図示の例では、開口部11のY軸方向の大きさは、試料Sの大きさLyと同じである。具体的には、開口部11のY軸方向の大きさは、例えば、6mmである。
【0119】
図11(B)に示すように、透過電子顕微鏡200のY移動機構770を用いて、試料Sの第4領域S4の観察を行う。具体的には、例えば、Y移動機構770を用いて試料支持部10を移動させながら、第4領域S4の+Y軸方向側の端部S4aから第1領域S1の−X軸方向側の端部S4bまで観察を行う。したがって、第4領域S4の観察終了時には、電子線の光軸EBは、端部S4bに位置する。
【0120】
図11(C)に示すように、試料ホルダー200の第2試料支持部移動機構50によって、試料支持部10を移動させる。具体的には、第2試料支持部移動機構50は、図11(C)に示すように、試料支持部10を、+Y軸方向に、距離D3移動させる。この結果、電子線の光軸EBは、試料Sの第5領域S5の−Y軸方向側の端部S5bに位置する。
【0121】
図11(D)に示すように、試料支持部10を、電子線の光軸EBが第5領域S5の+Y軸方向側の端部S5a(第4領域S4の端部S4b)に位置するように移動させる。具体的には、透過電子顕微鏡200のステージ移動機構制御部224が、Y移動機構770を制御して、試料支持部10の位置を変更するステージ移動処理を行う。このステージ移動処理により、Y移動機構770が、試料支持部10を、図11(C)に示す工程で第2試料支持部移動機構50が試料支持部10を移動させた方向(+Y軸方向)とは反対方向(−Y軸方向)に、第2試料支持部移動機構50が移動させた距離(距離D3)だけ、移動させる。すなわち、ステージ移動処理によって、試料支持部10は、−Y軸方向に、距離D3だけ移動する。これにより、図11(D)に示すように、電子線の光軸EBは、第5領域S5の+Y軸方向側の端部S5a(第4領域S4の端部S4b)に位置する。すなわち、図11(C)工程において、第2試料支持部移動機構50によって移動した試料支持部10の移動分がキャンセルされる。
【0122】
図11(E)に示すように、透過電子顕微鏡200のY移動機構770を用いて、試料Sの第5領域S5の観察を行う。具体的には、例えば、Y移動機構770を用いて試料支持部10を移動させながら、第5領域S5の+Y軸方向側の端部S5aから第5領域S5の−Y軸方向側の端部S5bまで観察を行う。したがって、第5領域S5の観察終了時には、電子線の光軸EBは、第5領域S5の端部S5bに位置する。
【0123】
図示はしないが、試料Sの第6領域S6に対しても、領域S4,S5と同様に、第2試料支持部移動機構50、Y移動機構770、およびステージ移動機構制御部224を用いて観察する。
【0124】
以上の工程により、試料Sの第4領域S4から第6領域S6まで連続した観察を行うことができる。
【0125】
本実施形態に係る試料ホルダー300および透過電子顕微鏡システムは、例えば、以下の特徴を有する。
【0126】
本実施形態に係る試料ホルダー300によれば、第2試料支持部移動機構50が、試料支持部10を、Y軸方向に、距離D3ずつ移動させることができる。ここで、距離D3は、Y移動機構770による試料支持部10のY軸方向の移動可能範囲である。これにより、透過電子顕微鏡において、Y移動機構770による試料支持部10のY軸方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、大きな試料を、切断せずに観察することができる。
【0127】
具体的には、試料ホルダー300によれば、透過電子顕微鏡200において、Y移動機構770による試料支持部10のY軸方向の移動可能範囲(距離D3)と、試料支持部移動機構50による試料支持部10のY軸方向の移動可能範囲(第2距離)との和の範囲で観察ができる。
【0128】
また、第2試料支持部移動機構50は、試料支持部10を、距離D3ずつ移動させることができる。これにより、図11に示すように、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0129】
なお、上述した実施形態は一例であって、これらに限定されるわけではない。
【0130】
例えば、上述した試料ホルダー100の例では、第1試料支持部移動機構30が、X軸方向に試料支持部10を移動させ、上述した試料ホルダー300の例では、第2試料支持部移動機構50が、Y軸方向に試料支持部10を移動させたが、これらを組み合わせてもよい。すなわち、試料ホルダーが、第1試料支持部移動機構30と、第2試料支持部移動機構50と、を含んで構成されていてもよい。これにより、試料支持部移動機構30,50によって、試料支持部10を、X軸方向およびY軸方向に移動させることができる。したがって、透過電子顕微鏡において、より広い範囲の観察ができる。
【0131】
また、上述した試料ホルダー100の例では、第1試料支持部移動機構30が、試料支持部10を、X軸方向に、距離D1ずつ移動させた。これに対して、第1試料支持部移動機構30は、試料支持部10を、X軸方向に、距離D1よりも小さい距離ずつ移動させてもよい。この場合にも、上述した試料ホルダー100の例と同様に、透過電子顕微鏡において、X移動機構760による試料支持部10のX軸方向の移動可能範囲よりも、広い範囲の観察ができる。
【0132】
また、同様に、上述した試料ホルダー300の例では、第2試料支持部移動機構50が、試料支持部10を、Y軸方向に、距離D3ずつ移動させた。これに対して、試料支持部移動機構50は、試料支持部10を、Y軸方向に、距離D3よりも小さい距離ずつ移動させてもよい。この場合にも、上述した試料ホルダー300の例と同様に、透過電子顕微鏡において、Y移動機構770による試料支持部10のY軸方向の移動可能範囲よりも、広い範囲の観察ができる。
【0133】
また、上述した試料ホルダー100の例では、第1試料支持部移動機構30が、図2に示すように、直動ガイド32と、移動用つまみ33と、カム34と、ローラ36と、ローラガイド38と、移動シャフト固定部40と、を含んで構成されていた。第1試料支持部移動機構の構成は、試料室において、試料支持部をX軸方向に移動させることができればこれに限定されない。試料支持部移動機構は、例えば、移動シャフトにおねじを設け、直動ガイドにめねじを設け、直動ガイドを回転させることにより、移動シャフトを移動させて、X軸方向に沿って試料支持部を移動させる構成としてもよい。また、上述した試料ホルダー300の第2試料支持部移動機構50の構成についても、試料室において、試料支持部をY軸方向に移動させることができれば、限定されない。
【0134】
また、上述した透過電子顕微鏡システム1000の例では、図8(D)に示すように、透過電子顕微鏡200のステージ移動機構制御部224が、X移動機構760を制御して、試料支持部10の位置を変更するステージ移動処理を行った。これに対して、ステージ移動機構制御部224が、ステージ移動処理を行わずに、ユーザーが、直接、X移動機構760を操作して、試料支持部10の位置を変更してもよい。
【0135】
また、上述した第2実施形態に係る透過電子顕微鏡システムの例では、図11(D)に示すように、透過電子顕微鏡200のステージ移動機構制御部224が、Y移動機構770を制御して、試料支持部10の位置を変更するステージ移動処理を行った。これに対して、ステージ移動機構制御部224が、ステージ移動処理を行わずに、ユーザーが、直接、Y移動機構770を操作して、試料支持部10の位置を変更してもよい。
【0136】
なお、本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法および結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
【符号の説明】
【0137】
S 試料、1 試料室、2 壁部、10 試料支持部、11 開口部、12 支持板、
14 板ばね、16 ビス、17 板ばね固定部、20 軸部、22 移動シャフト、
24 筒体、25 先端、30 第1試料支持部移動機構、31 ねじ、
32 直動ガイド、33 移動用つまみ、34 カム、35 ローラ案内孔、
36 ローラ、37 ねじ、38 ローラガイド、39 ねじ、
40 移動シャフト固定部、41 Oリング、50 第2試料支持部移動機構、
51 収容部、52 モーター、54 平歯車対、56 送りねじ、58 戻しばね、
100 試料ホルダー、200 透過電子顕微鏡、201 電子線源、
202 照射レンズ系202、204 偏向器、207 ステージ移動機構、
208 対物レンズ、210 投影レンズ、212 検出器、214 鏡筒、
220 処理部、222 画像生成部、224 ステージ移動機構制御部、
230 操作部、232 表示部、234 記憶部、236 情報記憶媒体、
704 シフター支持部材、706 球面軸受部、710 管状部材(シフター)、
712 孔、714 ベアリング、716 球面部、719 Oリング、
760 X駆動機構、761 ベアリング、762 レバー、763 軸、
764 Xモーター、766 平歯車対、768 X送りねじ、769 ベローズ、
770 Y駆動機構、774 Yモーター、776 平歯車対、778 Y送りねじ、
779 戻しばね、1000 透過電子顕微鏡システム
【技術分野】
【0001】
本発明は、試料ホルダーおよび透過電子顕微鏡システムに関する。
【背景技術】
【0002】
透過電子顕微鏡(Transmission Electron Microscope;TEM)は、高い空間分解能で観察や分析を行うことが可能なため、微小領域の評価に用いられる。
【0003】
透過電子顕微鏡では、棒状の試料ホルダーを用いて、試料を試料室内に保持する(例えば、特許文献1参照)。透過電子顕微鏡で観察できる試料サイズは、一般的に、φ3mm程度に規定されている。透過電子顕微鏡には、試料ステージを高精度に移動させるためのステージ移動機構が設けられている。ステージ移動機構は、規定された試料サイズの範囲で試料を高精度に移動させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−66832号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような透過電子顕微鏡では、ステージ移動機構によって試料が移動できる範囲が、観察可能な範囲に対応している。したがって、このような透過電子顕微鏡では、ステージ移動機構によって試料が移動できる範囲よりも広い範囲の観察が困難であった。
【0006】
そのため、例えば、φ3mmよりも大きな試料を観察する場合、試料を規定されたサイズ以下に切断し、複数回に分けて観察するなどしなければならなかった。しかしながら、試料を切断すると、試料にダメージを与えてしまったり、試料の切断された部分の情報が失われてしまったりする場合がある。
【0007】
本発明は、以上のような問題点に鑑みてなされたものであり、本発明のいくつかの態様によれば、透過電子顕微鏡において、広い範囲の観察が可能な試料ホルダーおよび透過電子顕微鏡システムを提供することができる。
【課題を解決するための手段】
【0008】
(1)本発明に係る試料ホルダーは、
試料支持部を備え、透過電子顕微鏡の試料室における前記試料支持部の位置が、前記透過電子顕微鏡のステージ移動機構によって変更される試料ホルダーであって、
前記試料支持部が設けられた軸部と、
前記試料室における前記試料支持部の位置を変える第1試料支持部移動機構と、
を含み、
前記ステージ移動機構は、前記試料室における電子線の進行方向に対して交差する第1方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第1距離であり、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1方向に、前記第1距離以下ずつ移動させ、
前記第1試料支持部移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第2距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第1方向の大きさは、前記第1距離と前記第2距離との和以上である。
【0009】
このような試料ホルダーによれば、第1試料支持部移動機構が、試料支持部を、第1方向に移動させることができる。これにより、透過電子顕微鏡において、ステージ移動機構による試料支持部の第1方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、大きな試料を、切断せずに観察することができる。さらに、第1試料支持部移動機構は、試料支持部を、第1距離以下ずつ移動させることができる。これにより、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0010】
(2)本発明に係る試料ホルダーにおいて、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1距離ずつ移動させてもよい。
【0011】
このような試料ホルダーによれば、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0012】
(3)本発明に係る試料ホルダーにおいて、
さらに、前記試料室における前記試料支持部の位置を変える第2試料支持部移動機構を含み、
前記ステージ移動機構は、前記電子線の進行方向および前記第1方向に対して交差する第2方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第2方向の移動可能範囲は、第3距離であり、
前記第2試料支持部移動機構は、前記試料支持部を、前記第2方向に、前記第3距離以下ずつ移動させ、
前記第2試料支持部移動機構による前記試料支持部の前記第2方向の移動可能範囲は、第4距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第2方向の大きさは、前記第3距離と前記第4距離との和以上であってもよい。
【0013】
このような試料ホルダーによれば、第2試料支持部移動機構が、試料支持部を、第2方向に移動させることができる。これにより、透過電子顕微鏡において、ステージ移動機構による試料支持部の第2方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、より大きな試料を、切断せずに観察することができる。さらに、第2試料支持部移動機構は、試料支持部を、第2距離以下ずつ移動させることができる。これにより、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0014】
(4)本発明に係る試料ホルダーにおいて、
前記第2試料支持部移動機構は、前記試料支持部を、前記第3距離ずつ移動させてもよい。
【0015】
このような試料ホルダーによれば、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0016】
(5)本発明に係る透過電子顕微鏡システムは、
試料が配置される試料室を備えた透過電子顕微鏡と、
前記試料室に配置される試料支持部を備えた試料ホルダーと、
を含み、
前記透過電子顕微鏡は、前記試料室における前記試料支持部の位置を変更するステージ移動機構を有し、
前記ステージ移動機構は、前記試料室における電子線の進行方向に対して交差する第1方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第1距離であり、
前記試料ホルダーは、
前記試料支持部が形成された軸部と、
前記試料室における前記試料支持部の位置を変える第1試料支持部移動機構と、
を有し、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1方向に、前記第1距離以下ずつ移動させ、
前記第1試料支持部移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第2距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第1方向の大きさは、前記第1距離と前記第2距離との和以上である。
【0017】
このような透過電子顕微鏡システムによれば、試料ホルダーの第1試料支持部移動機構が、試料支持部を、第1方向に移動させることができる。これにより、透過電子顕微鏡において、ステージ移動機構による試料支持部の第1方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、大きな試料を、切断せずに観察することができる。さらに、第1試料支持部移動機構は、試料支持部を、第1距離以下ずつ移動させることができる。これにより、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0018】
(6)本発明に係る透過電子顕微鏡システムにおいて、
前記透過電子顕微鏡は、前記ステージ移動機構を制御するための制御部を有し、
前記制御部は、前記ステージ移動機構を制御して、前記試料支持部の位置を変更するステージ移動処理を行い、
前記試料支持部は、前記ステージ移動処理によって、前記第1試料支持部移動機構が前記試料支持部を移動させた方向とは反対方向に、前記第1試料支持部移動機構が前記試料支持部を移動させた距離だけ移動してもよい。
【0019】
このような透過電子顕微鏡システムによれば、第1試料支持部移動機構によって移動した試料支持部の移動分をキャンセルできる。
【0020】
(7)本発明に係る透過電子顕微鏡システムにおいて、
前記制御部は、前記第1試料支持部移動機構が前記試料支持部を移動させたタイミングに基づいて、前記ステージ移動処理を行ってもよい。
【0021】
このような透過電子顕微鏡システムによれば、例えば、第1試料支持部移動機構によって移動した試料支持部の移動分を、自動的にキャンセルできる。
【図面の簡単な説明】
【0022】
【図1】第1実施形態に係る試料ホルダーを模式的に示す側面図。
【図2】第1実施形態に係る試料ホルダーを模式的に示す断面図。
【図3】第1実施形態に係る試料ホルダーの試料支持部を模式的に示す斜視図。
【図4】第1実施形態に係る試料ホルダーの試料支持部移動機構を構成するカムを模式的に示す斜視図。
【図5】第1実施形態に係る試料ホルダーの動作を説明するための図。
【図6】第1実施形態に係る透過電子顕微鏡システムの構成を説明するための図。
【図7】第1実施形態に係る透過電子顕微鏡に、第1実施形態に係る試料ホルダーを装着した状態を示す模式図。
【図8】第1実施形態に係る透過電子顕微鏡システムの動作を説明するための図。
【図9】第1実施形態に係る透過電子顕微鏡の表示部および操作部を模式的に示す図。
【図10】第2実施形態に係る試料ホルダーを模式的に示す断面図。
【図11】第2実施形態に係る透過電子顕微鏡システムの動作を説明するための図。
【発明を実施するための形態】
【0023】
以下、本発明の好適な実施形態について詳細に説明する。なお、以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0024】
1.第1実施形態
1.1. 試料ホルダー
まず、第1実施形態に係る試料ホルダーについて図面を参照しながら説明する。図1は、第1実施形態に係る試料ホルダー100を模式的に示す側面図である。図2は、試料ホルダー100を模式的に示す断面図である。
【0025】
試料ホルダー100は、透過電子顕微鏡用の試料ホルダーである。試料ホルダー100は、ポールピースの横から試料を挿入するサイドエントリー式の試料ホルダーである。試料ホルダー100は、一般的な試料サイズ(φ3mm)よりも、大きなサイズ(例えばφ6mm以上)の試料を保持できるように構成されている。試料ホルダー100は、図1および図2に示すように、試料支持部(試料ステージ)10と、軸部20と、試料支持部移動機構30と、を含む。
【0026】
図3は、試料支持部10を模式的に示す斜視図である。試料支持部10は、軸部20の先端に設けられている。試料支持部10は、開口部11と、支持板12と、板ばね14と、板ばね固定部17と、を含んで構成されている。
【0027】
開口部11は、支持板12に形成されている。開口部11は、透過電子顕微鏡の試料室において、電子線を通過させるための貫通孔である。図示の例では、開口部11の平面形状(電子線の入射方向からみたときの形状)は円であるが、その形状は特に限定されず、例えば、楕円、多角形であってもよい。開口部11の軸方向(試料ホルダー100の軸に沿う方向)Aの大きさDは、後述する透過電子顕微鏡のステージ移動機構による試料支持部10の軸方向Aの移動可能範囲(第1距離)と、試料支持部移動機構30の軸方向Aの移動可能範囲(第2距離)との和以上である。具体的には、開口部11の軸方向Aの大きさDは、6mm程度である。図示の例では、開口部11の平面形状は、円であり、開口部11の大きさDは、当該円の直径である。
【0028】
支持板12は、移動シャフト22の先端に固定されている。支持板12には、開口部11の周囲に沿って窪みが形成されている。
【0029】
板ばね14は、板ばね固定部17にビス16によって固定されている。板ばね14は、支持板12の開口部11と同じ形状および同じ大きさの貫通孔が形成されている。ばね固定部17は、移動シャフト22に固定されている。
【0030】
試料(図示しない)は、支持板12に形成された開口部11の周囲の窪みに収容され、板ばね14によって押さえつけられることによって固定される。透過電子顕微鏡の試料室において、電子線は、開口部11、試料、および板ばね14の貫通孔を通過する。
【0031】
なお、ここでは、試料支持部10が、試料を、板ばね14によって固定する場合について説明したが、図示はしないが、試料支持部10は、例えば、試料を、ねじの締め付け等により固定してもよい。
【0032】
軸部20は、図1および図2に示すように、移動シャフト22と、筒体24と、を含んで構成されている。
【0033】
移動シャフト22は、軸方向Aに沿って延びる棒状の部材である。移動シャフト22の一方の端には、試料支持部10が設けられ、他方の端は、移動シャフト固定部40に接続されている。移動シャフト22は、筒体24の内側に収容されている。移動シャフト22と筒体24との間は、透過電子顕微鏡の試料室を真空に保つために、Oリング41で真空シールされている。移動シャフト22は、直動ガイド32によって直線的に移動可能に案内されている。移動シャフト22は、試料支持部移動機構30の動作によって軸方向Aに沿って移動する。移動シャフト22の移動に伴って試料支持部10が移動する。
【0034】
筒体24は、軸方向Aに沿って延びる筒状の部材であり、内部に移動シャフト22が移動可能に収容されている。筒体24の外面には、透過電子顕鏡の試料室を真空に保つためのOリング42が装着されている。
【0035】
試料支持部移動機構30は、図2に示すように、直動ガイド32と、移動用つまみ33と、カム34と、ローラ36と、ローラガイド38と、移動シャフト固定部40と、を含んで構成されている。
【0036】
直動ガイド32は、移動シャフト22を、軸方向Aに沿って直線的に移動可能に案内している。直動ガイド32には、ローラ36がネジ37によって固定されている。
【0037】
移動用つまみ33は、ネジ31によってカム34に固定されている。移動用つまみ33は、移動シャフト22を中心軸として回転可能である。
【0038】
カム34は、円筒状の部材であり、内側には、直動ガイド32が収容されている。図4は、カム34を模式的に示す斜視図である。カム34には、図4に示すように、階段状のローラ案内孔35が設けられている。ローラ案内孔35は、ローラ36が位置P1、位置P2、位置P3間を移動できるように形成されている。図示の例では、位置P1は、移動シャフト固定部40側であり、位置P3は、試料支持部10側である。
【0039】
ローラ36は、ローラ案内孔35、およびローラガイド38の規制孔38aに挿入されている。
【0040】
ローラガイド38は、筒体24にネジ39によって固定されている。ローラガイド38には、貫通孔が形成されており、当該貫通孔には移動シャフト22が収容されている。また、ローラガイド38には、軸方向Aに沿って延びる規制孔38aが設けられている。この規制孔38aにローラ36が挿入されている。したがって、ローラ36の動きは、この規制孔38aによって規制される。すなわち、ローラ36は、軸方向Aに沿ってのみ移動可能である。
【0041】
移動シャフト固定部40には、移動シャフト22が接続されている。
【0042】
ここで、試料支持部移動機構30の動作について説明する。
【0043】
移動用つまみ33をまわすと、移動用つまみ33と一体となったカム34が回転して、カム34のローラ案内孔35に挿入されているローラ36が軸方向Aに沿って移動する。このローラ36の移動により、ローラ36に接続されている直動ガイド32が移動して、移動シャフト固定部40を軸方向Aに沿って移動させる。移動シャフト固定部40が移動することで、移動シャフト22が移動し、移動シャフト22の先端部に設けられた試料支持部10が軸方向Aに沿って移動する。
【0044】
図5は、試料ホルダー100の動作を説明するための図である。図5(A)は、ローラ36がローラ案内孔35の位置P1(図4参照)に位置している場合の試料ホルダー100を模式的に示す側面図である。図5(B)は、ローラ36がローラ案内孔35の位置P2に位置している場合の試料ホルダー100を模式的に示す側面図である。図5(C)は、ローラ36がローラ案内孔35の位置P3に位置している場合の試料ホルダー100を模式的に示す側面図である。
【0045】
図5(A)に示すように、ローラ36が位置P1に位置するとき、試料支持部10(開口部11の中心)は、筒体24の先端25(試料支持部10側の端部)から距離L1離れている。ここで、距離L1は、軸方向Aにおける、試料支持部10と筒体24の先端25との間の距離である。以下、距離L2,L3も同様である。移動用つまみ33をまわし、ローラ36を位置P1から位置P2に移動させると、図5(B)に示すように、試料支持部10は、筒体24の先端25から距離L1よりも大きい距離L2離れる。さらに、移動用つまみ33をまわし、ローラ36を位置P2から位置P3に移動させると、図5(C)に示すように、試料支持部10は、筒体24の先端25から距離L2よりも大きい距離L3離れる。すなわち、図示の例では、距離L1<距離L2<距離L3である。
【0046】
このように、試料支持部10は、試料支持部移動機構30によって、軸方向Aに沿って移動することができる。
【0047】
なお、試料ホルダー100は、移動用つまみ33を回転させるための移動用つまみ駆動部(図示しない)を有していてもよい。移動用つまみ駆動部は、例えば、移動用つまみ33を回転させるためのモーターを有し、このモーターを制御することによって、移動用つまみ33を回転させてもよい。
【0048】
1.2. 透過電子顕微鏡システム
(1)透過電子顕微鏡システムの構成
次に、本実施形態に係る透過電子顕微鏡システムの構成について図面を参照しながら説明する。本実施形態に係る透過電子顕微鏡システムは、本実施形態に係る試料ホルダーを含んで構成されている。
【0049】
図6は、本実施形態に係る透過電子顕微鏡システム200の構成を説明するための図である。ここでは、透過電子顕微鏡が、透過型電子顕微鏡(TEM)の構成を有する場合について説明するが、電子顕微鏡は、走査透過型電子顕微鏡(Scanning Transmission Electron Microscope;STEM)の構成を有していてもよい。なお、本実施形態に係る透過電子顕微鏡は、図6の構成要素(各部)の一部を省略した構成としてもよい。
【0050】
透過電子顕微鏡システム1000は、図6に示すように、本実施形態に係る試料ホルダー100と、透過電子顕微鏡200と、で構成されている。
【0051】
透過電子顕微鏡200は、電子線源201と、照射レンズ系202と、偏向器204と、ステージ移動機構207と、対物レンズ208と、投影レンズ210と、検出器212と、鏡筒214と、処理部220と、操作部230と、表示部232と、記憶部234と、情報記憶媒体236と、を含んで構成されている。
【0052】
電子線源201、照射レンズ系202、偏向器204、対物レンズ208、投影レンズ210、検出器212は、鏡筒214の内部に収容されている。鏡筒214の内部は、排気装置(図示省略)によって減圧排気されている。
【0053】
電子線源201は、陰極から放出された電子を陽極で加速し電子線を放出する。電子線源201の例として、公知の電子銃を挙げることができる。
【0054】
照射レンズ系202は、電子線源201の後段に配置されている。照射レンズ系202は、複数の集束レンズ(図示省略)を含んで構成されている。照射レンズ系202は、試料Sに照射される電子線(入射電子線)の収束角を調整する。
【0055】
偏向器204は、照射レンズ系202の後段に配置されている。偏向器204は、複数の偏向コイルと、当該複数の偏向コイルに流れる電流量を制御するための電流制御部(図示省略)とを有する。偏向器204は、電流制御部で各偏向コイルに流れる電流を制御することにより入射電子線を2次元的に偏向させる。
【0056】
試料Sは、偏向器204の後段の試料室に配置される。試料ホルダー100は、試料室において、試料Sを支持している。試料ホルダー100に支持された試料Sは、ステージ移動機構207によって、水平方向や垂直方向に精度よく移動する。ステージ移動機構207の詳細については、後述する。
【0057】
対物レンズ208は、試料Sの後段に配置されている。対物レンズ208は、試料Sを透過した電子線を結像させる。投影レンズ210は、対物レンズ208の後段に配置されている。投影レンズ210は、対物レンズ208によって結像された像をさらに拡大し、検出器212上に結像させる。
【0058】
検出器212は、投影レンズ210の後段に配置されている。検出器212は、投影レンズ210によって結像された透過電子顕微鏡像を検出する。検出器212の例として、2次元的に配置されたCCD(Charge Coupled Device)を受光部とするCCDカメラを挙げることができる。検出器212が検出した透過電子顕微鏡像の像情報は、処理部220に出力される。
【0059】
処理部220は、例えば、取得した像情報から透過電子顕微鏡像を生成する画像生成部222を有している。また、処理部220は、ステージ移動機構207を制御するためのステージ移動機構制御部224を有している。
【0060】
ステージ移動機構制御部224は、ステージ移動機構207を制御して、試料支持部10の位置を変更するステージ移動処理を行う。試料支持部10は、後述するように、ステージ移動処理によって、試料支持部移動機構30が試料支持部10を移動させた方向とは反対方向に、試料支持部移動機構30が試料支持部10を移動させた距離だけ移動する。
【0061】
ステージ移動機構制御部224は、試料支持部移動機構30が試料支持部10を移動させたタイミングに基づいて、ステージ移動処理を行う。
【0062】
操作部230は、ユーザーが操作情報を入力するためのものであり、入力された操作情報を処理部220に出力する。操作部230の機能は、キーボード、マウス、タッチパネル型ディスプレイなどのハードウェアにより実現することができる。
【0063】
表示部232は、処理部220によって生成された画像を表示するものであり、その機能は、LCD、CRTなどにより実現できる。表示部232は、処理部220により生成された透過電子顕微鏡像を表示する。
【0064】
記憶部234は、処理部220のワーク領域となるもので、その機能はRAMなどにより実現できる。情報記憶媒体236(コンピュータにより読み取り可能な媒体)は、プログラムやデータなどを格納するものであり、その機能は、光ディスク(CD、DVD)、光磁気ディスク(MO)、磁気ディスク、ハードディスク、或いはメモリ(ROM)などにより実現できる。処理部220は、情報記憶媒体236に格納されるプログラムに基づいて本実施形態の種々の処理を行う。情報記憶媒体236には、処理部220の各部としてコンピューターを機能させるためのプログラムを記憶することができる。
【0065】
図7は、透過電子顕微鏡200に、試料ホルダー100を、装着した状態を示す模式図である。図7では、便宜上、透過電子顕微鏡200をXY平面における断面図で示している。
【0066】
試料ホルダー100は、図7に示すように、試料室1に試料支持部10が位置するように、透過電子顕微鏡200に装着される。図示の例では、試料ホルダー100は、軸方向AがX軸方向に沿うように装着される。ここで、Z軸方向は、試料室1を通過する電子線の進行方向である。すなわち、電子線の光軸EBは、Z軸方向に沿う方向である。また、X軸、Y軸、Z軸は、互いに直交している。なお、ここでは、X軸、Y軸、Z軸が互いに直交している場合について説明するが、X軸,Y軸,Z軸は、例えば、互いに直交せずに、互いに交差していてもよい。試料ホルダー100では、試料室1における試料支持部10の位置が、ステージ移動機構207によって変更される。
【0067】
ステージ移動機構207は、管状部材(以下「シフター」ともいう)710と、X移動機構760と、Y移動機構770と、を含んで構成されている。
【0068】
試料室1は、図7に示すように、壁部2によって囲まれている。シフター10は、壁部2を貫通するように設けられたシフター支持部材704によって支持されている。シフター710は、試料室1に連通する孔712を有しており、試料ホルダー100は、この孔712に移動可能に装着されている。X移動機構760は、試料支持部10を、X軸方向に沿って移動させる。Y移動機構70は、シフター710を回動させることにより試料支持部10をY軸方向に沿って移動させる。
【0069】
透過電子顕微鏡200では、試料S(試料支持部10)を試料室1の所望の位置へ移動および静止させることができる。具体的には、透過電子顕微鏡200では、試料ホルダー100によって支持された試料Sを、移動機構760,770によってX,Y軸方向に沿って直線的に移動させることができる。また、透過電子顕微鏡200は、Z移動機構(図示しない)によって、Z軸方向に沿って試料Sを直線的に移動させてもよいし、傾斜機構(図示しない)によって、試料SをX軸周りに傾斜させてもよい。
【0070】
試料室1は、減圧状態に維持可能である。試料室1は、公知のポンプ(図示しない)によって真空排気されることにより減圧状態に維持される。試料室1には、試料ホルダー100によって試料Sが導入される。そして、試料室1において、試料Sに電子線が照射される。
【0071】
シフター支持部材704は、壁部2を貫通する円筒状の部材である。シフター支持部材704には、シフター710が挿入されている。シフター支持部材704の試料室1側には、球面軸受部706が設けられている。球面軸受部706は、その内面が球面状に形成されている。
【0072】
シフター710は、管状の部材であり、試料室1に連通する孔712を有している。図示の例では、孔712は、X軸方向に貫通している。孔712の形状は、例えば、円柱状であり、孔712の中心軸(図示しない)は、X軸と平行である。孔712には、試料ホルダー100が装着される。これにより、試料ホルダー100は、Y軸方向およびZ軸方向の移動が規制され、X軸方向に直線的に移動可能となる。試料ホルダー100は、試料ホルダー100の軸方向AとX軸方向とが、互いに平行となるように、孔712に装着される。シフター710の内側には、試料ホルダー100を支持するベアリング714が設けられている。ベアリング714は、シフター710の両端部(孔712の開口付近)にそれぞれ設けられている。ベアリング714は、試料ホルダー100のX軸方向への移動を円滑にすることができる。
【0073】
シフター710は、試料室1側の端部に、球面部716を有する。球面部716の表面は、中心が孔712の中心軸上にある球面状に形成されている。球面部716は、球面軸受部706により支持される。球面軸受部706は、その内面が球面部716の表面に接するように形成されている。これにより、球面部716は、球面軸受部706に摺動可能に支持される。そのため、シフター710は、球面部716の中心を回動中心として、回動することができる。球面部716と球面軸受部706との間には、試料室1を気密に封止するためのOリング719が設けられている。
【0074】
X移動機構760およびY移動機構770は、試料室1における試料支持部10の位置を変えることができる。すなわち、X移動機構760およびY移動機構770は、試料Sを試料室1の所望の位置へ移動および静止させるように、試料ホルダー100を動作させる。
【0075】
X移動機構760は、試料ホルダー100をX軸方向に沿って移動させる。X移動機構760は、図7に示すように、レバー762と、Xモーター764と、平歯車対766と、X送りねじ768と、を含んで構成されている。
【0076】
レバー762は、軸763を回転中心とするてこ式のレバーである。レバー762の試料室1側の端部には、ベアリング761が設けられ、ベアリング761を介して試料ホルダー100(筒体24)を支持している。ベアリング761は、YZ平面内を転動することができる。そのため、試料S(試料支持部10)のY軸方向への移動が円滑になる。試料ホルダー100には、試料室1と大気との圧力差により、−X軸方向の力が働いている。そのため、試料ホルダー100は、この力によってレバー762(ベアリング761)に押しつけられている。レバー762の試料室1側とは反対側の端部には、X送りねじ768が接している。
【0077】
X送りねじ768は、Xモーター764の回転によって、X軸方向に直線的に移動する。このX送りねじ768の移動により、レバー762は、軸763を回転中心として回転し、試料支持部10をX軸方向に直線的に移動させる。平歯車対766は、Xモーター764の回転をX送りねじ768に伝達することができる。ベローズ769は、試料室1を減圧状態に保ちつつ、レバー762の移動を円滑にすることができる。
【0078】
X移動機構760による試料支持部10の移動可能範囲(第1距離)は、電子線の光軸EBを中心とした距離D1の範囲である。なお、X移動機構760による試料支持部10の移動可能範囲とは、X移動機構760によって、試料支持部10が、X軸方向に沿って移動することができる範囲(距離)をいう。具体的には、X移動機構760による試料支持部10の移動可能範囲(距離D1)は、例えば、2mmである。
【0079】
Y移動機構770は、Yモーター774と、平歯車対776と、Y送りねじ778と、戻しばね779と、を含んで構成されている。Y送りねじ778の先端は、図7に示すように、シフター710の−Y軸方向側の外周面に接している。シフター710の+Y軸方向側の外周面には、戻しばね779が接している。シフター710は、戻しばね779によって、−Y軸方向に付勢されている。Y送りねじ778は、Yモーター774の回転によって、Y軸方向に直線的に移動する。このY送りねじ778の移動により、シフター710は、球面部716の中心を回動中心として回動する。これにより、試料支持部10をY軸方向に直線的に移動させることができる。平歯車対776は、Yモーター774の回転をY送りねじ778に伝達することができる。
【0080】
Y移動機構770による試料支持部10の移動可能範囲(第3距離)は、電子線の光軸EBを中心とした距離D3の範囲である。Y移動機構770による試料支持部10の移動可能範囲とは、Y移動機構770によって、試料支持部10が、Y軸方向に沿って移動することができる範囲(距離)をいう。具体的には、Y移動機構770による試料支持部10の移動可能範囲(距離D3)は、例えば、2mmである。
【0081】
なお、透過電子顕微鏡200は、さらに、試料支持部10をZ軸方向に移動させるZ移動機構(図示せず)を有していてもよい。Z移動機構は、Y移動機構770と同様の構成であってもよい。
【0082】
(2) 透過電子顕微鏡システムの動作
次に、本実施形態に係る透過電子顕微鏡システム1000の動作について図面を参照しながら説明する。本実施形態に係る透過電子顕微鏡システム1000は、試料ホルダー100の試料支持部移動機構30、および透過電子顕微鏡200のステージ移動機構207(X移動機構760)によって試料支持部10(試料S)を移動させて、試料Sの観察を行う。
【0083】
図8は、本実施形態に係る透過電子顕微鏡システム1000の動作を説明するための図である。なお、図8は、試料ホルダー100に支持された試料Sを模式的に示す断面図であり、図7のVIII−VIII線断面図である。以下、図6および図7に示す透過電子顕微鏡システム1000および図8に示す試料Sを参照しながら説明する。
【0084】
図8(A)に示すように、試料Sは、試料室1内に試料支持部10に支持された状態で導入される。試料ホルダー100は、図5(A)に示すように、ローラ36がローラ案内孔35の位置P1(図4参照)に位置している状態である。
【0085】
ここで、試料支持部移動機構30は、試料支持部10を、X軸方向に、距離D1ずつ移動させるように設定されている。距離D1は、X移動機構760による試料支持部10の移動可能範囲であり、例えば、2mmである。すなわち、図5に示す距離L1、L2、L3は、|L2−L1|=|L3−L2|=D1の関係を有する。
【0086】
また、試料支持部移動機構30による試料支持部10の移動可能範囲(第2距離)は、図示の例では、距離2×D1である。なお、試料支持部移動機構30による試料支持部10の移動可能範囲とは、試料支持部移動機構30の動作によって、試料支持部10が、X軸方向(軸方向A)に沿って移動することができる範囲(距離)をいう。具体的には、試料支持部移動機構30による試料支持部10の移動可能範囲(第2距離)は、例えば、4mm(2×2mm)である。
【0087】
図8に示す、試料Sの観察可能な領域のX軸方向の大きさLxは、X移動機構760による試料支持部10の移動可能範囲(距離D1)よりも大きい。図示の例では、試料Sの大きさLxは、X移動機構760による試料支持部10の移動可能範囲(距離D1)と、試料支持部移動機構30による試料支持部10の移動可能範囲(距離2×D1)との和、すなわち、距離3×D1である。具体的には、試料Sの大きさLxは、例えば、6mm(3×2mm)である。図示の例では、便宜上、試料Sを、3つの領域(第1領域S1,第2領域S2,第3領域S3)に分けて示している。各領域S1,S2,S3のX軸方向の大きさは、距離D1である。
【0088】
この試料Sの大きさLxに対応して、試料支持部10の開口部11のX軸方向の大きさは、試料Sの大きさLx以上である。図示の例では、開口部11のX軸方向の大きさは、試料Sの大きさLxと同じである。具体的には、開口部11のX軸方向の大きさは、例えば、6mm以上である。このように開口部11が大きいため、大きな試料Sに対して、広い範囲の観察ができる。
【0089】
図8(B)に示すように、透過電子顕微鏡200のX移動機構760を用いて、試料Sの第1領域S1の観察を行う。具体的には、X移動機構760を用いて試料支持部10を移動させながら、第1領域S1の+X軸方向側の端部S1aから第1領域S1の−X軸方向側の端部S1bまで観察を行う。したがって、第1領域S1の観察終了時には、電子線の光軸EBは、端部S1bに位置する。
【0090】
図8(C)に示すように、試料ホルダー100の試料支持部移動機構30によって、試料支持部10を移動させる。本工程において、試料支持部移動機構30は、図8(C)に示すように、試料支持部10を、+X軸方向に、距離D1移動させる。具体的には、例えば、ユーザーが移動用つまみ33をまわすことによって、ローラ36の位置を位置P1から位置P2に変える(図4参照)。これにより、試料ホルダー100は、図5(B)に示すローラ36がローラ案内孔35の位置P2に位置している状態となる。したがって、試料支持部10を、+X軸方向に、移動させることができる。この結果、電子線の光軸EBは、試料Sの第2領域S2の−X軸方向側の端部S2bに位置する。
【0091】
本工程は、試料ホルダー100が透過電子顕微鏡200に装着された状態で行われる。なお、本工程は、試料ホルダー100を透過電子顕微鏡200から取り外した状態で行われてもよい。
【0092】
図8(D)に示すように、試料支持部10を、電子線の光軸EBが第2領域S2の+X軸方向側の端部S2a(第1領域S1の端部S1b)に位置するように移動させる。具体的には、透過電子顕微鏡200のステージ移動機構制御部224が、X移動機構760を制御して、試料支持部10の位置を変更するステージ移動処理を行う。このステージ移動処理により、X移動機構760が、試料支持部10を、図8(C)に示す工程で試料支持部移動機構30が試料支持部10を移動させた方向(+X軸方向)とは反対方向(−X軸方向)に、試料支持部移動機構30が移動させた距離(距離D1)だけ、移動させる。すなわち、ステージ移動処理によって、試料支持部10は、−X軸方向に、距離D1だけ移動する。これにより、図8(D)に示すように、電子線の光軸EBは、第2領域S2の+X軸方向側の端部S2a(第1領域S1の端部S1b)に位置する。すなわち、図8(C)工程において、試料支持部移動機構30によって移動した試料支持部10の移動分がキャンセルされる。
【0093】
なお、ステージ移動機構制御部224は、試料支持部移動機構30が試料支持部10を移動させたタイミングに基づいて、ステージ移動処理を行う。具体的には、試料ホルダー100の移動用つまみ33をまわすと、これに連動して信号を出力する信号出力部(図示しない)が信号を出力し、この信号を受けてステージ移動機構制御部224がステージ移動処理を行ってもよい。
【0094】
また、例えば、移動用つまみ33をまわした後に、ユーザーが透過電子顕微鏡システム1000に設けられたボタンを押すことで、ステージ移動機構制御部224がステージ移動処理を行ってもよい。図9は、表示部232および操作部230を模式的に示す図である。当該ボタンは、例えば、図9に示すように、表示部232に表示されたGUIのボタンSWであってもよい。操作部230によって、ボタンSWをクリックすることで、ステージ移動機構制御部224がステージ移動処理を開始してもよい。
【0095】
図8(E)に示すように、透過電子顕微鏡200のX移動機構760を用いて、試料Sの第2領域S2の観察を行う。具体的には、X移動機構760を用いて試料支持部10を移動させながら、第2領域S2の+X軸方向側の端部S2aから第2領域S2の−X軸方向側の端部S2bまで観察を行う。したがって、第2領域S2の観察終了時には、電子線の光軸EBは、第2領域S2の端部S2bに位置する。
【0096】
図示はしないが、試料Sの第3領域S3に対しても、領域S1,S2と同様に、試料支持部移動機構30、X移動機構760、およびステージ移動機構制御部224を用いて観察を行う。
【0097】
以上の工程により、試料Sの第1領域S1から第3領域S3まで連続した観察を行うことができる。
【0098】
本実施形態に係る試料ホルダー100および透過電子顕微鏡システム1000は、例えば、以下の特徴を有する。
【0099】
本実施形態に係る試料ホルダー100によれば、試料支持部移動機構30が、試料支持部10を、X軸方向に、距離D1ずつ移動させることができる。ここで、距離D1は、X移動機構760による試料支持部10のX軸方向の移動可能範囲である。これにより、透過電子顕微鏡において、X移動機構760による試料支持部10のX軸方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、大きな試料を、切断せずに観察することができる。
【0100】
例えば、試料ホルダーが試料支持部移動機構を有さない場合、透過電子顕微鏡では、試料支持部の移動可能範囲は、ステージ移動機構によって移動可能な範囲に制限される。すなわち、観察可能な範囲は、ステージ移動機構によって移動可能な範囲に制限される。本実施形態によれば、試料ホルダー100が試料支持部移動機構30を有するため、X移動機構760(ステージ移動機構207)によって移動可能な範囲(距離D1)よりも広い範囲の観察ができる。
【0101】
具体的には、試料ホルダー100によれば、透過電子顕微鏡200において、X移動機構760による試料支持部10のX軸方向の移動可能範囲(第1距離D1)と、試料支持部移動機構30による試料支持部10のX軸方向の移動可能範囲(第2距離)との和の範囲で観察ができる。
【0102】
また、試料支持部移動機構30は、試料支持部10を、距離D1ずつ移動させることができる。これにより、図8に示すように、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0103】
また、試料支持部移動機構30は、上述したように、例えば、透過電子顕微鏡200のX移動機構760と比べて、簡易な構成で実現できる。
【0104】
透過電子顕微鏡システム1000によれば、ステージ移動機構制御部224が、X移動機構760を制御して、試料支持部10の位置を変更するステージ移動処理を行うことができる。ステージ移動処理では、X移動機構760が、試料支持部10を、試料支持部移動機構30が試料支持部10を移動させた方向とは反対方向に、試料支持部移動機構30が移動させた距離だけ、移動させることができる。これにより、試料支持部移動機構30によって移動した試料支持部10の移動分をキャンセルできる。
【0105】
透過電子顕微鏡システム1000によれば、ステージ移動機構制御部224は、試料支持部移動機構30が試料支持部10を移動させたタイミングに基づいて、ステージ移動処理を行うことができる。これにより、例えば、試料支持部移動機構30による試料支持部10の移動分を、自動的にキャンセルできる。
【0106】
2. 第2実施形態
2.1. 試料ホルダー
次に、第2実施形態に係る試料ホルダーについて説明する。図10は、第2実施形態に係る試料ホルダー300を模式的に示す断面図である。以下、第2実施形態に係る試料ホルダー300において、上述した試料ホルダー100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0107】
試料ホルダー100の例では、図2に示すように、試料支持部移動機構30(以下、「第1試料支持部移動機構30」ともいう)が、軸方向Aに、試料支持部10を移動させた。これに対して、試料ホルダー300の試料支持部移動機構50(以下、「第2試料支持部移動機構50」ともいう)は、電子線の進行方向および軸方向Aと直交する方向(第2方向)に、試料支持部10を移動させる。図示の例では、電子線の進行方向は、Z軸方向である。また、軸方向Aは、X軸方向である。したがって、第2試料支持部移動機構50が試料支持部10を移動させる方向(第2方向)は、Y軸方向である。
【0108】
試料ホルダー200では、移動シャフト22には、先端部近傍に球面部22aが設けられている。球面部22aの表面は、球面状に形成されている。また、筒体24には、球面軸受部24aが設けられている。球面軸受部24aは、その内面が球面状に形成されている。球面部22aは、球面軸受部24aにより支持される。
【0109】
第2試料支持部移動機構50は、モーター52と、平歯車対54と、送りねじ56と、戻しばね58と、を含んで構成されている。モーター52および平歯車対54は、収容部51に収容されている。
【0110】
送りねじ56の先端は、図10に示すように、直動ガイド32の−Y軸方向側の外周面に接している。直動ガイド32の+Y軸方向側の外周面には、戻しばね58が接している。直動ガイド32は、戻しばね58によって、−Y軸方向に付勢されている。
【0111】
送りねじ56は、モーター52の回転によって、Y軸方向に直線的に移動する。平歯車対54は、モーター52の回転を送りねじ56に伝達することができる。この送りねじ56の移動により、直動ガイド32は、Y軸方向に移動する。直動ガイド32の移動に伴って、移動シャフト22は、球面部22aの中心を回動中心として回動する。これにより、試料支持部10をY軸方向に直線的に移動させることができる。
【0112】
2.2. 透過電子顕微鏡システム
次に、第2実施形態に係る透過電子顕微鏡システムについて説明する。第2実施形態に係る透過電子顕微鏡システムは、第2実施形態に係る試料ホルダー300と、透過電子顕微鏡と、を含む。なお、第2実施形態に係る透過電子顕微鏡システムにおいて、透過電子顕微鏡の構成は、図6および図7に示す透過電子顕微鏡200の構成と同様である。
【0113】
図11は、本実施形態に係る透過電子顕微鏡システムの動作を説明するための図である。なお、図11(A)〜(E)は、試料室1における試料SのYZ断面を模式的に示す断面図である。
【0114】
図11(A)に示すように、試料Sは、試料室1内に試料支持部10に支持された状態で導入される。
【0115】
ここで、第2試料支持部移動機構50は、試料支持部10を、Y軸方向に沿って距離D3ずつ移動させる。距離D3は、図7に示すように、Y移動機構770による試料支持部10の移動可能範囲であり、例えば、2mmである。
【0116】
また、第2試料支持部移動機構50による試料支持部10の移動可能範囲(第4距離)は、図11の例では、2×D3である。なお、第2試料支持部移動機構50による試料支持部10の移動可能範囲とは、第2試料支持部移動機構50によって、試料支持部10が、Y軸方向に沿って移動することができる範囲(距離)をいう。具体的には、第2試料支持部移動機構50による試料支持部10の移動可能範囲(第4距離)は、例えば、4mm(2×2mm)である。
【0117】
図11に示す、試料Sの観察可能な領域のY軸方向の大きさLyは、Y移動機構770による試料支持部10の移動可能範囲(距離D3)よりも大きい。図示の例では、試料Sの大きさLyは、Y移動機構770による試料支持部10の移動可能範囲(距離D3)と、第2試料支持部移動機構50による試料支持部10の移動可能範囲(距離2×D3)との和、すなわち、距離3×D3である。具体的には、試料Sの大きさLxは、例えば、6mm(3×2mm)である。図示の例では、便宜上、試料Sを、3つの領域(第4領域S4,第5領域S5,第6領域S6)に分けて示している。各領域S4,S5,S6のY軸方向の大きさは、距離D3である。
【0118】
この試料Sの大きさLyに対応して、試料支持部10の開口部11のY軸方向の大きさは、試料Sの大きさLy以上である。図示の例では、開口部11のY軸方向の大きさは、試料Sの大きさLyと同じである。具体的には、開口部11のY軸方向の大きさは、例えば、6mmである。
【0119】
図11(B)に示すように、透過電子顕微鏡200のY移動機構770を用いて、試料Sの第4領域S4の観察を行う。具体的には、例えば、Y移動機構770を用いて試料支持部10を移動させながら、第4領域S4の+Y軸方向側の端部S4aから第1領域S1の−X軸方向側の端部S4bまで観察を行う。したがって、第4領域S4の観察終了時には、電子線の光軸EBは、端部S4bに位置する。
【0120】
図11(C)に示すように、試料ホルダー200の第2試料支持部移動機構50によって、試料支持部10を移動させる。具体的には、第2試料支持部移動機構50は、図11(C)に示すように、試料支持部10を、+Y軸方向に、距離D3移動させる。この結果、電子線の光軸EBは、試料Sの第5領域S5の−Y軸方向側の端部S5bに位置する。
【0121】
図11(D)に示すように、試料支持部10を、電子線の光軸EBが第5領域S5の+Y軸方向側の端部S5a(第4領域S4の端部S4b)に位置するように移動させる。具体的には、透過電子顕微鏡200のステージ移動機構制御部224が、Y移動機構770を制御して、試料支持部10の位置を変更するステージ移動処理を行う。このステージ移動処理により、Y移動機構770が、試料支持部10を、図11(C)に示す工程で第2試料支持部移動機構50が試料支持部10を移動させた方向(+Y軸方向)とは反対方向(−Y軸方向)に、第2試料支持部移動機構50が移動させた距離(距離D3)だけ、移動させる。すなわち、ステージ移動処理によって、試料支持部10は、−Y軸方向に、距離D3だけ移動する。これにより、図11(D)に示すように、電子線の光軸EBは、第5領域S5の+Y軸方向側の端部S5a(第4領域S4の端部S4b)に位置する。すなわち、図11(C)工程において、第2試料支持部移動機構50によって移動した試料支持部10の移動分がキャンセルされる。
【0122】
図11(E)に示すように、透過電子顕微鏡200のY移動機構770を用いて、試料Sの第5領域S5の観察を行う。具体的には、例えば、Y移動機構770を用いて試料支持部10を移動させながら、第5領域S5の+Y軸方向側の端部S5aから第5領域S5の−Y軸方向側の端部S5bまで観察を行う。したがって、第5領域S5の観察終了時には、電子線の光軸EBは、第5領域S5の端部S5bに位置する。
【0123】
図示はしないが、試料Sの第6領域S6に対しても、領域S4,S5と同様に、第2試料支持部移動機構50、Y移動機構770、およびステージ移動機構制御部224を用いて観察する。
【0124】
以上の工程により、試料Sの第4領域S4から第6領域S6まで連続した観察を行うことができる。
【0125】
本実施形態に係る試料ホルダー300および透過電子顕微鏡システムは、例えば、以下の特徴を有する。
【0126】
本実施形態に係る試料ホルダー300によれば、第2試料支持部移動機構50が、試料支持部10を、Y軸方向に、距離D3ずつ移動させることができる。ここで、距離D3は、Y移動機構770による試料支持部10のY軸方向の移動可能範囲である。これにより、透過電子顕微鏡において、Y移動機構770による試料支持部10のY軸方向の移動可能範囲よりも、広い範囲の観察ができる。したがって、例えば、大きな試料を、切断せずに観察することができる。
【0127】
具体的には、試料ホルダー300によれば、透過電子顕微鏡200において、Y移動機構770による試料支持部10のY軸方向の移動可能範囲(距離D3)と、試料支持部移動機構50による試料支持部10のY軸方向の移動可能範囲(第2距離)との和の範囲で観察ができる。
【0128】
また、第2試料支持部移動機構50は、試料支持部10を、距離D3ずつ移動させることができる。これにより、図11に示すように、広い範囲を連続して観察することができる。したがって、例えば、大きな試料を観察する際に、広い範囲を途切れることなく観察することができる。
【0129】
なお、上述した実施形態は一例であって、これらに限定されるわけではない。
【0130】
例えば、上述した試料ホルダー100の例では、第1試料支持部移動機構30が、X軸方向に試料支持部10を移動させ、上述した試料ホルダー300の例では、第2試料支持部移動機構50が、Y軸方向に試料支持部10を移動させたが、これらを組み合わせてもよい。すなわち、試料ホルダーが、第1試料支持部移動機構30と、第2試料支持部移動機構50と、を含んで構成されていてもよい。これにより、試料支持部移動機構30,50によって、試料支持部10を、X軸方向およびY軸方向に移動させることができる。したがって、透過電子顕微鏡において、より広い範囲の観察ができる。
【0131】
また、上述した試料ホルダー100の例では、第1試料支持部移動機構30が、試料支持部10を、X軸方向に、距離D1ずつ移動させた。これに対して、第1試料支持部移動機構30は、試料支持部10を、X軸方向に、距離D1よりも小さい距離ずつ移動させてもよい。この場合にも、上述した試料ホルダー100の例と同様に、透過電子顕微鏡において、X移動機構760による試料支持部10のX軸方向の移動可能範囲よりも、広い範囲の観察ができる。
【0132】
また、同様に、上述した試料ホルダー300の例では、第2試料支持部移動機構50が、試料支持部10を、Y軸方向に、距離D3ずつ移動させた。これに対して、試料支持部移動機構50は、試料支持部10を、Y軸方向に、距離D3よりも小さい距離ずつ移動させてもよい。この場合にも、上述した試料ホルダー300の例と同様に、透過電子顕微鏡において、Y移動機構770による試料支持部10のY軸方向の移動可能範囲よりも、広い範囲の観察ができる。
【0133】
また、上述した試料ホルダー100の例では、第1試料支持部移動機構30が、図2に示すように、直動ガイド32と、移動用つまみ33と、カム34と、ローラ36と、ローラガイド38と、移動シャフト固定部40と、を含んで構成されていた。第1試料支持部移動機構の構成は、試料室において、試料支持部をX軸方向に移動させることができればこれに限定されない。試料支持部移動機構は、例えば、移動シャフトにおねじを設け、直動ガイドにめねじを設け、直動ガイドを回転させることにより、移動シャフトを移動させて、X軸方向に沿って試料支持部を移動させる構成としてもよい。また、上述した試料ホルダー300の第2試料支持部移動機構50の構成についても、試料室において、試料支持部をY軸方向に移動させることができれば、限定されない。
【0134】
また、上述した透過電子顕微鏡システム1000の例では、図8(D)に示すように、透過電子顕微鏡200のステージ移動機構制御部224が、X移動機構760を制御して、試料支持部10の位置を変更するステージ移動処理を行った。これに対して、ステージ移動機構制御部224が、ステージ移動処理を行わずに、ユーザーが、直接、X移動機構760を操作して、試料支持部10の位置を変更してもよい。
【0135】
また、上述した第2実施形態に係る透過電子顕微鏡システムの例では、図11(D)に示すように、透過電子顕微鏡200のステージ移動機構制御部224が、Y移動機構770を制御して、試料支持部10の位置を変更するステージ移動処理を行った。これに対して、ステージ移動機構制御部224が、ステージ移動処理を行わずに、ユーザーが、直接、Y移動機構770を操作して、試料支持部10の位置を変更してもよい。
【0136】
なお、本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法および結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
【符号の説明】
【0137】
S 試料、1 試料室、2 壁部、10 試料支持部、11 開口部、12 支持板、
14 板ばね、16 ビス、17 板ばね固定部、20 軸部、22 移動シャフト、
24 筒体、25 先端、30 第1試料支持部移動機構、31 ねじ、
32 直動ガイド、33 移動用つまみ、34 カム、35 ローラ案内孔、
36 ローラ、37 ねじ、38 ローラガイド、39 ねじ、
40 移動シャフト固定部、41 Oリング、50 第2試料支持部移動機構、
51 収容部、52 モーター、54 平歯車対、56 送りねじ、58 戻しばね、
100 試料ホルダー、200 透過電子顕微鏡、201 電子線源、
202 照射レンズ系202、204 偏向器、207 ステージ移動機構、
208 対物レンズ、210 投影レンズ、212 検出器、214 鏡筒、
220 処理部、222 画像生成部、224 ステージ移動機構制御部、
230 操作部、232 表示部、234 記憶部、236 情報記憶媒体、
704 シフター支持部材、706 球面軸受部、710 管状部材(シフター)、
712 孔、714 ベアリング、716 球面部、719 Oリング、
760 X駆動機構、761 ベアリング、762 レバー、763 軸、
764 Xモーター、766 平歯車対、768 X送りねじ、769 ベローズ、
770 Y駆動機構、774 Yモーター、776 平歯車対、778 Y送りねじ、
779 戻しばね、1000 透過電子顕微鏡システム
【特許請求の範囲】
【請求項1】
試料支持部を備え、透過電子顕微鏡の試料室における前記試料支持部の位置が、前記透過電子顕微鏡のステージ移動機構によって変更される試料ホルダーであって、
前記試料支持部が設けられた軸部と、
前記試料室における前記試料支持部の位置を変える第1試料支持部移動機構と、
を含み、
前記ステージ移動機構は、前記試料室における電子線の進行方向に対して交差する第1方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第1距離であり、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1方向に、前記第1距離以下ずつ移動させ、
前記第1試料支持部移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第2距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第1方向の大きさは、前記第1距離と前記第2距離との和以上である、試料ホルダー。
【請求項2】
請求項1において、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1距離ずつ移動させる、試料ホルダー。
【請求項3】
請求項1または2において、
さらに、前記試料室における前記試料支持部の位置を変える第2試料支持部移動機構を含み、
前記ステージ移動機構は、前記電子線の進行方向および前記第1方向に対して交差する第2方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第2方向の移動可能範囲は、第3距離であり、
前記第2試料支持部移動機構は、前記試料支持部を、前記第2方向に、前記第3距離以下ずつ移動させ、
前記第2試料支持部移動機構による前記試料支持部の前記第2方向の移動可能範囲は、第4距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第2方向の大きさは、前記第3距離と前記第4距離との和以上である、試料ホルダー。
【請求項4】
請求項3において、
前記第2試料支持部移動機構は、前記試料支持部を、前記第3距離ずつ移動させる、試料ホルダー。
【請求項5】
試料が配置される試料室を備えた透過電子顕微鏡と、
前記試料室に配置される試料支持部を備えた試料ホルダーと、
を含み、
前記透過電子顕微鏡は、前記試料室における前記試料支持部の位置を変更するステージ移動機構を有し、
前記ステージ移動機構は、前記試料室における電子線の進行方向に対して交差する第1方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第1距離であり、
前記試料ホルダーは、
前記試料支持部が形成された軸部と、
前記試料室における前記試料支持部の位置を変える第1試料支持部移動機構と、
を有し、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1方向に、前記第1距離以下ずつ移動させ、
前記第1試料支持部移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第2距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第1方向の大きさは、前記第1距離と前記第2距離との和以上である、透過電子顕微鏡システム。
【請求項6】
請求項5において、
前記透過電子顕微鏡は、前記ステージ移動機構を制御するための制御部を有し、
前記制御部は、前記ステージ移動機構を制御して、前記試料支持部の位置を変更するステージ移動処理を行い、
前記試料支持部は、前記ステージ移動処理によって、前記第1試料支持部移動機構が前記試料支持部を移動させた方向とは反対方向に、前記第1試料支持部移動機構が前記試料支持部を移動させた距離だけ移動する、透過電子顕微鏡システム。
【請求項7】
請求項6において、
前記制御部は、前記第1試料支持部移動機構が前記試料支持部を移動させたタイミングに基づいて、前記ステージ移動処理を行う、透過電子顕微鏡システム。
【請求項1】
試料支持部を備え、透過電子顕微鏡の試料室における前記試料支持部の位置が、前記透過電子顕微鏡のステージ移動機構によって変更される試料ホルダーであって、
前記試料支持部が設けられた軸部と、
前記試料室における前記試料支持部の位置を変える第1試料支持部移動機構と、
を含み、
前記ステージ移動機構は、前記試料室における電子線の進行方向に対して交差する第1方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第1距離であり、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1方向に、前記第1距離以下ずつ移動させ、
前記第1試料支持部移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第2距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第1方向の大きさは、前記第1距離と前記第2距離との和以上である、試料ホルダー。
【請求項2】
請求項1において、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1距離ずつ移動させる、試料ホルダー。
【請求項3】
請求項1または2において、
さらに、前記試料室における前記試料支持部の位置を変える第2試料支持部移動機構を含み、
前記ステージ移動機構は、前記電子線の進行方向および前記第1方向に対して交差する第2方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第2方向の移動可能範囲は、第3距離であり、
前記第2試料支持部移動機構は、前記試料支持部を、前記第2方向に、前記第3距離以下ずつ移動させ、
前記第2試料支持部移動機構による前記試料支持部の前記第2方向の移動可能範囲は、第4距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第2方向の大きさは、前記第3距離と前記第4距離との和以上である、試料ホルダー。
【請求項4】
請求項3において、
前記第2試料支持部移動機構は、前記試料支持部を、前記第3距離ずつ移動させる、試料ホルダー。
【請求項5】
試料が配置される試料室を備えた透過電子顕微鏡と、
前記試料室に配置される試料支持部を備えた試料ホルダーと、
を含み、
前記透過電子顕微鏡は、前記試料室における前記試料支持部の位置を変更するステージ移動機構を有し、
前記ステージ移動機構は、前記試料室における電子線の進行方向に対して交差する第1方向に前記試料支持部を移動させることによって、前記試料室における前記試料支持部の位置を変更し、
前記ステージ移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第1距離であり、
前記試料ホルダーは、
前記試料支持部が形成された軸部と、
前記試料室における前記試料支持部の位置を変える第1試料支持部移動機構と、
を有し、
前記第1試料支持部移動機構は、前記試料支持部を、前記第1方向に、前記第1距離以下ずつ移動させ、
前記第1試料支持部移動機構による前記試料支持部の前記第1方向の移動可能範囲は、第2距離であり、
前記試料支持部は、前記試料室において電子線を通過させるための開口部を有し、
前記開口部の前記第1方向の大きさは、前記第1距離と前記第2距離との和以上である、透過電子顕微鏡システム。
【請求項6】
請求項5において、
前記透過電子顕微鏡は、前記ステージ移動機構を制御するための制御部を有し、
前記制御部は、前記ステージ移動機構を制御して、前記試料支持部の位置を変更するステージ移動処理を行い、
前記試料支持部は、前記ステージ移動処理によって、前記第1試料支持部移動機構が前記試料支持部を移動させた方向とは反対方向に、前記第1試料支持部移動機構が前記試料支持部を移動させた距離だけ移動する、透過電子顕微鏡システム。
【請求項7】
請求項6において、
前記制御部は、前記第1試料支持部移動機構が前記試料支持部を移動させたタイミングに基づいて、前記ステージ移動処理を行う、透過電子顕微鏡システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−8633(P2013−8633A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−141848(P2011−141848)
【出願日】平成23年6月27日(2011.6.27)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月27日(2011.6.27)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
[ Back to top ]