
試料保持容器を供給するための機器及び方法
【課題】操作者が介入する必要が低減され、それによって効率性、検査の正確性、及び処理能力のさらなる向上を図る。
【解決手段】試料保持容器を供給するための機器は、試料保持容器の積層列を収納するための回転カルーセル(キュベット装填モジュール14)を含む。回転カルーセルからの試料保持容器の積層列はシュート20に送り込まれ、そこで試料保持容器は、ヘリカルねじ切り部31を有する一組の回転部材30、32と接触する。螺旋状にねじ切りされた回転部材が回転することによって、その螺旋状にねじ切りされた回転部材は試料容器と係合し、各試料保持容器を積層列の残りの試料保持容器から分離する。次に試料保持容器は自動試料分析器で利用するため移送され得る。
【解決手段】試料保持容器を供給するための機器は、試料保持容器の積層列を収納するための回転カルーセル(キュベット装填モジュール14)を含む。回転カルーセルからの試料保持容器の積層列はシュート20に送り込まれ、そこで試料保持容器は、ヘリカルねじ切り部31を有する一組の回転部材30、32と接触する。螺旋状にねじ切りされた回転部材が回転することによって、その螺旋状にねじ切りされた回転部材は試料容器と係合し、各試料保持容器を積層列の残りの試料保持容器から分離する。次に試料保持容器は自動試料分析器で利用するため移送され得る。
【発明の詳細な説明】
【技術分野】
【0001】
発明の分野
本発明は、自動臨床試料分析器に使用されるキュベット(容器)を保管及び供給するための装置及び方法に関する。
【背景技術】
【0002】
発明の背景
臨床試料自動分析器は、病院及び研究機関において多量の試料を分析するために日常的に用いられている。自動試料分析器を使用して、例えば、水などの環境標本、又は血液、尿若しくは他の生体試料などの患者検体を検査し、例えば汚染物質又は分析物の濃度を測定することができる。
【0003】
自動試料分析器は様々な構成要素システムを有し、それらが連携して動作することにより患者試料が処理される。例えば、自動試料分析器は、1つ又は複数の試薬分注構成要素、試料保持容器供給構成要素、試料及び試薬プローブ、洗浄ステーション、検出機構、及び試料をあるステーションから別のステーションに移動させるための自動化されたアーム、カルーセル、又はコンベヤを有し得る。
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動試料分析器によって試料に対する分析の実施にかかる時間が短縮され、出力結果が向上し、且つ人為的エラー及び汚染が低減されるため、費用効果の高い試料分析が提供される。しかしながら、かかる分析器は機能が自動化されているにも関わらず、構成要素が正常に機能しない場合、又は試薬及び試料保持容器などの消耗品を交換しなければならない場合、操作者の介入を必要とすることが多い。従って当該技術分野では、操作者が介入する必要が低減され、それによって効率性、検査の正確性、及び処理能力がさらに向上した自動試料分析器が必要とされている。
【課題を解決するための手段】
【0005】
発明の概要
本発明は、自動臨床試料分析器に使用される試料保持容器を供給するための機器及び方法に関する。一態様において、本発明は、試料保持容器の積層列から試料保持容器を分離するための装置に関する。本装置は、少なくとも2つの試料保持容器の積層列を受け支えるための支持部材と、少なくとも1つの払出し部材、好ましくは2つの払出し部材とを含む。支持部材は、試料保持容器の積層列にある試料保持容器のうち少なくとも1つを第1の払出し部材と第2の払出し部材との間に案内するように配置される。第1の払出し部材及び第2の払出し部材は各々、ヘリカルねじ切り部を含む。第1の払出し部材は、時計回りの方向に回転可能な第1の回転体と動作可能に接続される。第2の払出し部材は、反時計回りの方向に回転可能な第2の回転体と動作可能に接続される。第1の回転体及び第2の回転体は第1の払出し部材及び第2の払出し部材を回転させ、それによって少なくとも2つの試料保持容器のうちの1つが試料保持容器の積層列から払い出される。さらなる実施形態において、第1の回転体はさらに反時計回りの方向に回転可能であり、一方、第2の回転体はさらに時計回りの方向に回転可能である。一実施形態において、回転体は振動モータを備え得る。
【0006】
本発明によれば、一実施形態において、払出し部材はねじ切りされる。例えば、一実施形態において、第1の払出し部材が右巻き方向のヘリカルねじ切り部を有し、第2の払出し部材が左巻き方向のヘリカルねじ切り部を有する。一実施形態において、右巻きヘリカルねじ切り部のピッチは左巻きヘリカルねじ切り部のピッチと同じである。或いは、一方のヘリカルねじ切り部のピッチは他方のヘリカルねじ切り部のピッチと異なる。ピッチは、一実施形態では約6.9°〜7.3°の範囲であり、一方、別の実施形態では、ピッチは約9.2°〜9.6°の範囲である。さらなる実施形態において、ピッチは約9.4°であり、一方、別の実施形態において、ピッチは約7.1°である。
【0007】
さらに別の実施形態において、第1の払出し部材は右巻き方向のヘリカルねじ切り部と左巻き方向のヘリカルねじ切り部とを有する。第2の払出し部材もまた、右巻き方向のヘリカルねじ切り部と左巻き方向のヘリカルねじ切り部とを有する。一実施形態によれば、第1の払出し部材の右巻きヘリカルねじ切り部のピッチは、第1の払出し部材の左巻きヘリカルねじ切り部のピッチと異なる。例えば、右巻きヘリカルねじ切り部のピッチは約6.9°〜7.3°の範囲であり、一方、左巻きヘリカルねじ切り部のピッチは約9.2°〜9.6°の範囲である。さらなる実施形態において、右巻きヘリカルねじ切り部のピッチは約7.1°であり、一方、左巻きヘリカルねじ切り部のピッチは約9.4°である。
【0008】
さらなる実施形態において、第1の払出し部材は略円筒形であり、第2の払出し部材と同じ直径を有する。別の実施形態において、第1の払出し部材の直径は第2の払出し部材の直径と異なる。さらに別の実施形態において、払出し部材は上部を最大幅部分として縮径しており、或いは最大幅部分は底部にある。
【0009】
本発明の一実施形態によれば、本発明に係る装置はまた、試料保持容器受けも含む。例えば、試料保持容器受けは、第1の試料保持容器が第2の試料保持容器から分離された後、その試料保持容器を受け支える。
【0010】
別の実施形態において、少なくとも2つの試料保持容器の積層列を受け支えるための支持部材は筒体であり、一方、別の実施形態において、支持部材は少なくとも2つの壁を備え、各壁がC字型断面を有する。
【0011】
本装置は、一実施形態によれば、回転モジュール、例えば、ホイール、ディスク、又はシリンダをさらに備え、これは試料保持容器の積層列を支持するための複数の開口を有する。一実施形態において、複数の開口の各々は、カルーセルの中心から等距離に、且つ互いに等距離に配置される。さらに別の実施形態において、複数の開口は回転カルーセルの周囲に配置される。
【0012】
別の態様によれば、本発明は、試料保持容器の積層列から試料保持容器を分離するための方法を含む。本方法は、少なくとも2つの試料保持容器の積層列を、ヘリカルねじ切り部を備える第1の払出し部材に隣接して配置すること、第1の払出し部材を第1の方向に回転させること、前記試料保持容器を係合すること;試料保持容器の積層列から第1の試料保持容器を切り離すこと;第1の払出し部材を第2の方向に回転させること;及び試料保持容器の積層列から試料保持容器を払い出すことを含む。
【0013】
さらなる実施形態において、本方法は、試料保持容器の積層列を第2の払出し部材に隣接して配置することを含む。例えば、この払出し部材はヘリカルねじ切り部を含む。一実施形態において、第1の払出し部材は右巻き方向のヘリカルねじ切り部を有し、第2の払出し部材は左巻き方向のヘリカルねじ切り部を有する。さらなる実施形態において、第1の払出し部材は左巻き方向のヘリカルねじ切り部も含み、一方、第2の払出し部材は右巻き方向のヘリカルねじ切り部も含む。
【0014】
一実施形態において、本方法は、前記第1の払出し部材を第1の方向に回転させるステップを実施しながら、前記第2の払出し部材を第2の方向に回転させることを含む。別の実施形態において、本方法は、前記第1の払出し部材を第2の方向に回転させるステップを実施しながら、前記第2の払出し部材を第1の方向に回転させることを含む。一実施形態において、第1の方向が時計回りの方向であり、第2の方向が反時計回りの方向である。別の実施形態において、第1の払出し部材から試料保持容器を払い出しながら、同時に第2の払出し部材から試料保持容器を払い出すステップ。
【図面の簡単な説明】
【0015】
図面の簡単な説明
【図1】本発明の例示的実施形態に係る、キュベット供給ステーションを有する自動試料分析器の上面平面図である。
【図2】本発明の例示的実施形態に係る、試料を保持し、且つキュベット供給ステーションから供給するためのキュベットの斜視図である。
【図3A】本発明の例示的実施形態に係る、キュベットの積層列を収容するためのキュベット装填モジュールを上部分に含む自動試料分析器のキュベットディスペンサの平面図である。
【図3B】本発明の一例示的実施形態に係る、図3Aに示されるとおりの自動試料分析器のキュベットディスペンサの斜視図であり、キュベット装填モジュールを係合して回転させるための係合部品を見せるため、キュベット装填モジュールが取り除かれている。
【図4】本発明の一例示的実施形態に係る、キュベットディスペンサを通じたキュベットの移動を始動させるための数個のセンサを含む自動試料分析器のキュベットディスペンサの斜視図である。
【図5A】本発明の一例示的実施形態に係る、キュベットがキュベット供給シュートに払い出されて配給される前にキュベットの積層列を収納しているキュベット装填モジュールの断面図である。
【図5B】本発明の一例示的実施形態に係る、図5Aのキュベット装填モジュールの断面図を含むキュベットディスペンサの断面図であり、ここでは図5Aに示されるキュベットの積層列がキュベット供給シュートに払い出されている。
【図5C】本発明の一例示的実施形態に係る、図5Bに示されるキュベットディスペンサの断面図であり、ここではキュベットの積層列からのキュベットがキュベット払出し部材からキュベット移送位置まで払い出されている。
【図6】(A)〜(C)は本発明の一実施形態に係る払出し部材が時計回りの方向に回転するときの斜視図である。
【図7】(A)〜(C)は本発明の一実施形態に係る払出し部材が反時計回りの方向に回転するときの斜視図である。
【図8A】本発明の例示的実施形態に係る、キュベット供給シュート内のキュベットの積層列からキュベットを払い出すためのキュベット払出し部材の斜視図であり、ここでキュベット払出し部材はねじ切りされており、回転してキュベットと係合することにより積層列からキュベットを外し取り、それをキュベット移送位置に供給する。
【図8B】本発明の例示的実施形態に係る、キュベット供給シュート内のキュベットの積層列からキュベットを払い出すためのキュベット払出し部材の斜視図であり、ここでキュベット払出し部材はねじ切りされており、回転してキュベットと係合することにより積層列からキュベットを外し取り、それをキュベット移送位置に供給する。
【図8C】本発明の例示的実施形態に係る、キュベット供給シュート内のキュベットの積層列からキュベットを払い出すためのキュベット払出し部材の斜視図であり、ここでキュベット払出し部材はねじ切りされており、回転してキュベットと係合することにより積層列からキュベットを外し取り、それをキュベット移送位置に供給する。
【発明を実施するための形態】
【0016】
発明の詳細な説明
自動試料分析器は、汚染物質又は分析物など、試料中の物質を検出するために使用される。例えば、試料は土壌若しくは水試料などの環境試料であることもあり、又は試料は、血液若しくは尿試料など、ヒト若しくは動物患者に由来することもある。自動試料分析器は所定のプロトコルに従い試料を分析でき、そうしたプロトコルとしては、例えば、試料保持容器の提供、試料の提供、試薬の添加、試料の吸引、及び試料の内容物の検出を挙げることができる。
【0017】
本明細書に記載されるとおりの本発明は、自動試料分析器で使用されるキュベットディスペンサを開示する。キュベットディスペンサは、本発明によれば、操作者のディスペンサへの介入を低減するような方法で試料保持容器を供給する。本発明によれば、操作者がキュベットディスペンサに試料保持容器を装填した後、キュベットディスペンサは必要に応じて個々の試料保持容器を自動試料分析器に配給する作業を処理し、そのため操作者が介入する必要性が低減される。さらに、このキュベット供給機構は機能不良を低減するよう設計され、従ってキュベットディスペンサ及び自動試料分析器の効率性が向上する。
【0018】
自動試料分析器
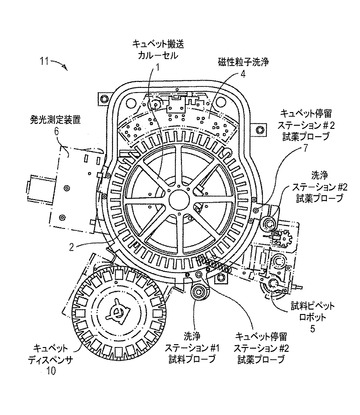
図1は、本発明の例示的実施形態に係る、キュベット装填ステーションを有する自動試料分析器の上面図である。本発明の一例示的実施形態によれば、自動試料分析器11は、キュベット搬送カルーセル1に隣接して配置されたキュベット供給ステーション10を有する。キュベット供給ステーション10が空のキュベット12(図示せず)を供給すると、そのキュベット12をキュベット移送アーム14(図示せず)が拾い上げ、キュベット供給ステーション10からキュベット搬送カルーセル1に移送する。
【0019】
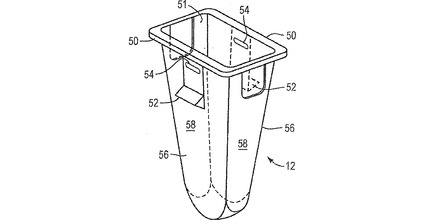
本発明に係る例示的試料キュベット12が図2に示される。一実施形態によれば、キュベット12は、2つの側壁56と2つの端壁58とを有する容器である。さらなる実施形態において、キュベット12は、キュベット12の開口51の周りに延在するリップ又はフランジ50を有する。例えば、一実施形態ではリップ50は側壁56から約90°で突出し、一方、別の実施形態ではリップ50は端壁58から約90°で突出している。或いは、リップ50は開口51の全周にわたって延在してもよい。
【0020】
引き続き図2を参照すると、さらなる実施形態において、キュベット12は側壁56に、別のキュベット12にある溝、穴又は凹部54を係合するための突起52を有する。さらに別の実施形態において、キュベット12は、第1の側壁56に第1の突起52を、及び第2の側壁56に第2の突起52を有する。別の実施形態において、キュベット12は側壁56に、別のキュベット12の突起52によって係合される溝、穴又は凹部54を有する。さらに別の実施形態において、キュベット12は、第1の側壁56に第1の凹部54を、及び第2の側壁56に第2の凹部54を有する。例えば、第1のキュベット12が第2のキュベット12に挿入されると、第1のキュベットの第1の突起52が、第2のキュベット12の第1の側壁56にある溝54に係合し、第1のキュベット12にある第2の突起52が、第2のキュベット12の第2の側壁56にある溝54に係合し、それによって第1のキュベット12が第2のキュベット12と離脱可能に固定され、キュベットの積層列120を形成する。
【0021】
本明細書で使用されているように、キュベットの積層列120とは、互いに離脱可能に連結されている少なくとも2つのキュベット12を意味する。離脱可能に連結されているとは、2つのキュベットが連結されているとき、下のキュベット12を上のキュベット12から分離させるには、地球の重力単独では十分でなく、下のキュベット、すなわち第1のキュベットを上のキュベット、すなわち第2のキュベットから分離させる外部からの力を加える必要があることを意味する。積層列中のキュベットの数は、例えば、2〜500個、好ましくは10、20、25、30、50、又は100個であり得る。
【0022】
別の実施形態において、キュベット12は端壁58に突起52を有し、一方さらなる実施形態において、キュベット12は端壁58に、溝、穴又は凹部54を有する。異なる実施形態において、キュベット12は、第1の端壁58に第1の突起52と第1の凹部54とを、及び第2の端壁58に第2の突起52と第2の凹部54とを有する。
【0023】
再び図1を参照すると、キュベット搬送カルーセル1はキュベット12を収容するための一連のスロット2を有する。本発明の一実施形態によれば、キュベット搬送カルーセル1は時計回り及び反時計回りのいずれの方向にも回転し、それによりスロット2に保持されたキュベット12を、自動試料分析器においてキュベット搬送カルーセル1に隣接する種々のステーションに配置できる。例えば、一実施形態において、キュベット搬送カルーセル1は回転してキュベット12を試料ピペットロボット5の近傍に配置し、それにより試料ピペットロボット5が試料を試料カルーセル(図示せず)からキュベット12に分注できるようにする。
【0024】
別の実施形態において、キュベット搬送カルーセル1は回転してキュベット12を試薬分注ステーション7に配置する。試薬分注ステーションでは、本発明の一実施形態によれば、例えば、緩衝液又は抗原若しくは抗体が結合している磁性粒子などの1つ又は複数の試薬(図示せず)が、1本又は複数の試薬ピペット(図示せず)によって試料キュベット12に分注される。
【0025】
さらなる実施形態において、キュベット搬送カルーセル1は回転してキュベット12を磁性粒子洗浄ステーション4に配置する。キュベット12がキュベット搬送カルーセル1から移され、そこで、試薬分注ステーション7でキュベット12に添加された磁気ビーズが、同時出願の「Magnetic Particle Washing Station」と題される米国特許出願(代理人整理番号第INL−099号)に記載される方法に従い洗浄される。
【0026】
さらに別の実施形態において、キュベット搬送カルーセル1は回転してキュベット12を分析ステーション6の近傍に配置する。例えば、一実施形態において本発明によれば、分析ステーションは発光測定装置6である。キュベット12がキュベット搬送カルーセル1から移され、1つずつ発光測定装置6の内部に配置される。一実施形態において、発光測定装置6は、例えば、試料中の標的分子を計測する化学発光分析を実施するための外光が入らない遮光環境を提供する。
【0027】
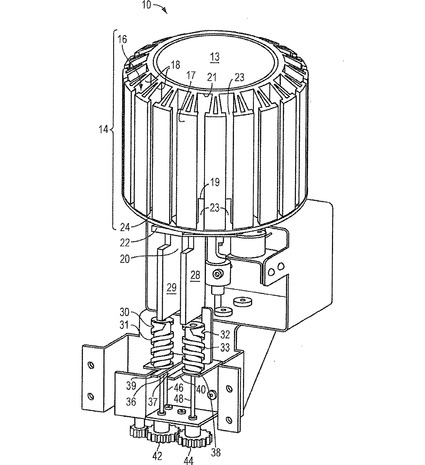
キュベットディスペンサ
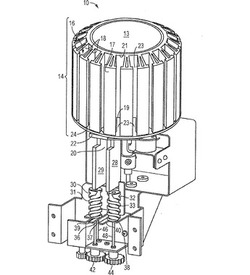
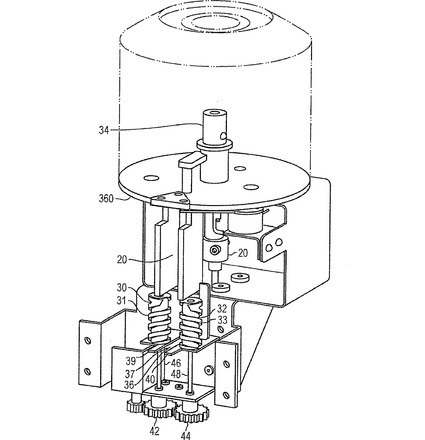
図3Aは、本発明の例示的実施形態に係る自動試料分析器のキュベットディスペンサの斜視図であり、キュベットの積層列を収容するためのキュベット装填モジュールを含み、一方、図3Bは、本発明の一例示的実施形態に係る、図3Aに示されるとおりの自動試料分析器のキュベットディスペンサの斜視図であるが、キュベット装填モジュールと係合して回転させるための係合部品を見せるため、キュベット装填モジュールは取り除かれている。
【0028】
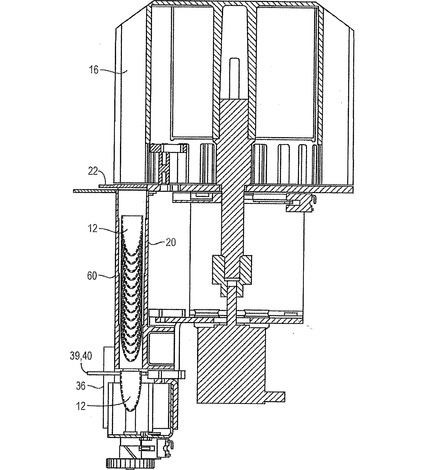
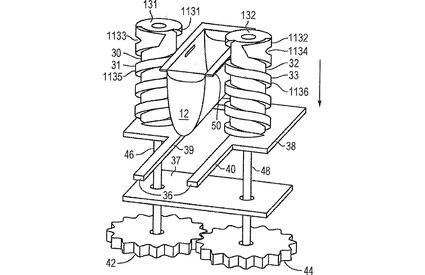
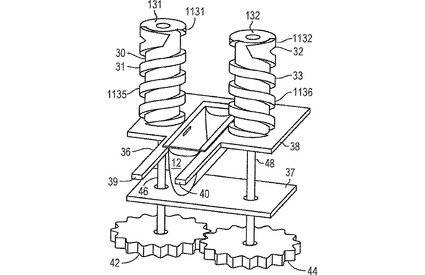
図3A〜Bに示されるとおり、一実施形態によれば、キュベットディスペンサ10は、キュベット装填モジュール14と、キュベット供給シュート20と、1つ又は複数のキュベット払出し部材30、32と、キュベット移送位置36とを含む。キュベット装填モジュール14は、キュベットの積層列120を保持するための複数のスロット16を有する。キュベット供給シュート20はキュベット装填モジュール14からキュベットの積層列120を受け取り、それらを1つ又は複数のキュベット払出し部材30、32に提供する。キュベット払出し部材30、32はキュベットの積層列120から個々のキュベット12を分離し、個々のキュベット12を1つずつキュベット移送位置36に供給する。
【0029】
本発明の一実施形態によれば、キュベット装填モジュールはキュベット供給シュート20及びキュベット払出し部材30、32の上方に配置される。一実施形態において、キュベット装填モジュール14は円形であり、例えば、ホイール、ディスク、又はシリンダである。さらなる実施形態において、キュベット装填モジュール14は、キュベットの積層列120を収容するための、モジュール14の上部13からモジュール14の底部24まで延在する複数の垂直方向のスロット16を有する。モジュール14は、例えば、15、20、又は25本のスロット16を有する。各スロット16は、2つの側壁18を含む。スロット16の側壁18は後壁21に当接する。本発明の一実施形態によれば、各スロット16は円形モジュール14の中心から等距離に離間される。さらなる実施形態において、各スロット16はモジュール14の全周にわたって等しく配分される。
【0030】
キュベット装填モジュール14のさらなる実施形態において、各側壁18はキュベットの積層列120を拘束するためのリップ17を有する。別の実施形態において、第1の側壁のリップ17と第2の側壁18のリップ17との間に間隙23がある。この間隙23により、操作者はスロット16が空か否か、又はキュベット12が充填されているか否かを確認することができ、従って操作の利便性が向上する。さらなる実施形態において、後壁21は、センサ(図示せず)がキュベット12の存在又は不在を検知できるようにするための窓19を含む。
【0031】
一実施形態によれば、キュベット装填モジュール14は中心軸の周りに回転する。モジュール14は基板360上に載置され、中心ピン34と係合する。ピン34はモータ(図示せず)と、例えばアクスル又はシャフトによって動作可能に接続される。ピン34が回転することによりモジュール14が回転し、キュベットの積層列120がキュベットシャッター22の上に配置される。一実施形態において、モジュール14が回転する間、基板360は静止したままである。さらなる実施形態において、基板360はキュベット積層列120の底部を支持する。
【0032】
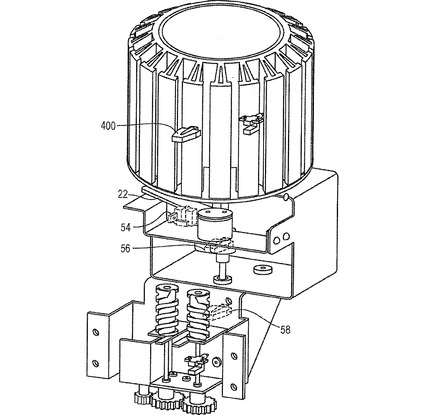
図4は、本発明の一例示的実施形態に係る自動試料分析器のキュベットディスペンサの斜視図であり、キュベットディスペンサを通じたキュベットの移動を始動させるための数個のセンサが示される。一実施形態において、キュベット積層列センサ400が基板360に固定される。本発明の別の実施形態によれば、キュベット積層列センサ400は、スロット16におけるキュベットの積層列120の存在又は不在を検知する。例えば、一実施形態において、キュベット積層列センサ400は、スロット16の後壁21にある窓19を介してキュベット積層列120の存在又は不在を検知する。例えば、スロット16にキュベットが検知されない場合、センサ400がキュベット積層列120の不在を検知し、キュベット装填モジュール14が回転してキュベットの積層列120をキュベットシャッター22上に配置する。
【0033】
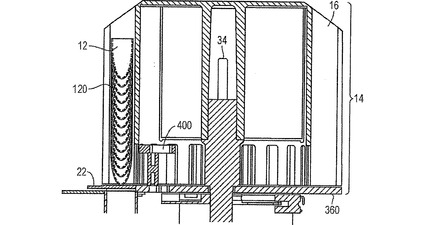
図5Aは、本発明の一例示的実施形態に係る、キュベットがキュベット供給シュートに払い出されて配給される前にキュベットの積層列を収納しているキュベット装填モジュールの断面図である。図5Aに示されるとおり、キュベット積層列120がキュベットシャッター22上に配置されると、キュベット積層列センサ400がキュベットを検知し、キュベットシャッター22を作動させて開ける。一実施形態において、キュベットシャッター22は基板360の平面で旋回してキュベットシュート20を開閉し、これは以下でさらに詳細に説明される。別の実施形態において、キュベットシャッター22は基板360と平行でない平面で旋回する。例えば、キュベットシャッター22は、一実施形態において、基板360と平行な平面から基板360と略垂直な平面まで開くドアである。
【0034】
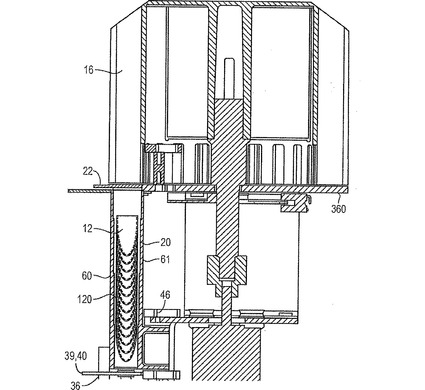
図5Bは、キュベットディスペンサの断面図である。本発明の一例示的実施形態に従い、図5Aに示されるキュベットの積層列がキュベット供給シュートに払い出されている。キュベットシャッター22が開くと、例えば、キュベット積層列120はキュベット装填モジュール14からキュベット供給シュート20の中に落下する。この時点で、積層列の最下位にあるキュベット12が第1のキュベット払出し部材30及び第2のキュベット払出し部材32の上に載置され、一方、残りのキュベットはシュート20によって支持される。
【0035】
本発明の一実施形態によれば、シュート20は筒体、例えば、矩形筒体、四角形筒体又は円筒形筒体であり、複数のキュベット12、例えばキュベットの積層列120を受け支えるサイズ及び形状である。さらなる実施形態において、筒体20は前部分60が開放されており、一方、別の実施形態において、筒体は前部分60が閉鎖されている。別の実施形態において、シュート20は第1の平行壁28及び第2の平行壁29を含んでキュベット12を支持し、それによりシュート内のキュベット12を視認することができる。例えば、一実施形態において、キュベット供給シュート20は一対の平行壁であり、各々の断面が角括弧([ ])のような形状であることにより、壁の間にキュベットの積層列120を支持するための中空の通路を提供する。
【0036】
再び図4を参照すると、本発明の一実施形態によれば、キュベットの積層列120がキュベット供給シュート20内に存在すると、例えばキュベット供給シュート20の基部に配置されたキュベット供給センサ56が、キュベット積層列120の存在を検知する。キュベット積層列120の存在を検知すると、第1のキュベット払出し部材30及び第2のキュベット払出し部材32が回転し、キュベット積層列120からキュベット12を払い出す。キュベット供給シュート20は、キュベット12が第1のキュベット払出し部材30及び第2のキュベット払出し部材32によって積層列120から外し取られるまで、キュベット12を支持する。
【0037】
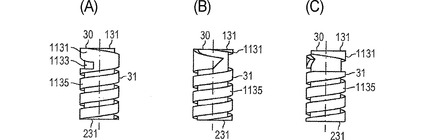
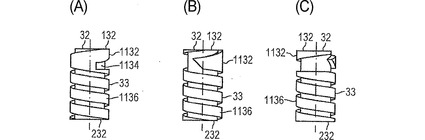
図6A〜C及び図7A〜Cは、それぞれ第1のキュベット払出し部材及び第2のキュベット払出し部材の斜視図である。図6A〜C及び図7A〜Cに示されるとおり、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は円筒形状である。一実施形態において、第1のキュベット払出し部材30は第2のキュベット払出し部材32と同じ直径を有する。別の実施形態において、第1のキュベット払出し部材30は第2のキュベット払出し部材32の直径と異なる直径を有する(図示せず)。しかしながら、代替的実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は縮径している(図示せず)。例えば、一実施形態において、テーパ状の第1のキュベット払出し部材30の最大幅部分はキュベット払出し部材30の底部であり、一方、別の実施形態において、テーパ状のキュベット払出し部材30の最大幅部分はキュベット払出し部材30の上部である。
【0038】
引き続き図6A〜C及び図7A〜Cを参照すると、本発明の一実施形態によれば、キュベット払出し部材30、32は、例えばねじの巻きのようにねじ切りされている。一実施形態によれば、第1のキュベット払出し部材30が第1の巻き方向のヘリカルねじ切り部31を有し、一方、第2のキュベット払出し部材32が第2の巻き方向のヘリカルねじ切り部33を有する。例えば、一実施形態において、第1のキュベット払出し部材30は、キュベット払出し部材30に配置された右巻き方向のヘリカルねじ切り部31を有し、一方、第2のキュベット払出し部材32は、キュベット払出し部材32に配置された左巻き方向のヘリカルねじ切り部33を有する。さらなる実施形態において、第1のキュベット払出し部材30は、キュベット払出し部材30に配置された右巻き方向のねじ切り部1135並びに左巻き方向のヘリカルねじ切り部1131を有する。さらなる実施形態において、第2のキュベット払出し部材32は、キュベット払出し部材32に配置された左巻き方向のヘリカルねじ切り部1136並びに右巻き方向のヘリカルねじ切り部1132を有する。
【0039】
代替的実施形態において、第1のキュベット払出し部材30は、第2のキュベット払出し部材32のヘリカルねじ切り部33と同じ向きのヘリカルねじ切り部31を有する。例えば、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は各々、右巻き方向のヘリカルねじ切り部31、33を有し、一方、別の実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は各々、左巻き方向のヘリカルねじ切り部31、33を有する。一実施形態において、キュベット払出し部材30、32は唯1つのねじ切り部を有し、一方、別の実施形態において、キュベット払出し部材30、32は2つ以上のねじ切り部を有する。
【0040】
引き続き図6A〜C及び図7A〜Cを参照すると、さらなる実施形態において、第1のキュベット払出し部材30は上端131に第1の巻き方向のねじ切り部1131を有する。ねじ切り部1131の向きはキュベット払出し部材30上で逆方向に変わり、第2の巻き方向のねじ切り部1135となる。ねじ切り部1131は反転点1133で方向が反転し、この反転点1133は、キュベット払出し部材30の上端131からキュベット払出し部材の底端231まで延びるキュベット払出し部材30の軸の長さに沿って約5〜45%のところにある。好ましくは、ねじ切り部1131は、キュベット払出し部材30の軸の長さに沿って約10〜35%、約15〜30%のところにある反転点1133で、又はより好ましくは約25%のところにある点で方向が反転する。例えば、一実施形態において、第1のキュベット払出し部材30は、第1のキュベット払出し部材30の上部分131又はその近傍を起点とする左巻き方向のねじ切り部1131を有する。一実施形態において、ねじ切り部の左巻き方向1131はキュベット払出し部材30の周りをほぼ一周(360度)した後、点1133で反転して右巻き方向1135となる。
【0041】
さらなる実施形態において、第2のキュベット払出し部材32は上端132に第1の巻き方向のねじ切り部1132を有する。ねじ切り部1132の向きはキュベット払出し部材32上で逆方向に変わり、第2の巻き方向のねじ切り部1136となる。ねじ切り部は反転点1134で方向が反転し、この反転点1134は、キュベット払出し部材32の上端132からキュベット払出し部材の底端232まで延びるキュベット払出し部材32の軸の長さに沿って約5〜45%のところにある。好ましくは、ねじ切り部1132は、キュベット払出し部材32の軸の長さに沿って約10〜35%、約15〜30%のところにある反転点1134で、又はより好ましくは約25%のところにある点で方向が反転する。例えば、一実施形態において、第1のキュベット払出し部材32は、第1のキュベット払出し部材32の上部分132又はその近傍を起点とする右巻き方向のねじ切り部1132を有する。一実施形態において、ねじ切り部の右巻き方向1132はキュベット払出し部材32の周りをほぼ一周(360度)した後、反転点1134で反転して左巻き方向1136となる。
【0042】
引き続き図6A〜C及び図7A〜Cを参照すると、さらなる実施形態において、第1のキュベット払出し部材30のヘリカルねじ切り部31のピッチは、第2のキュベット払出し部材32のヘリカルねじ切り部33のピッチと同じである。さらなる実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32のヘリカルねじ切り部31、33のピッチは約6°〜10°であり、及びさらなる実施形態において、ピッチは約7°である。
【0043】
図6A〜Cを参照すると、さらなる実施形態において、第1のキュベット払出し部材30は、第1のピッチを有する第1の巻き方向のヘリカルねじ切り部の第1の部分1131と、第2のピッチを有する第2の巻き方向のヘリカルねじ切り部の第2の部分1135とを有する。ヘリカルねじ切り部の第1の部分1131は、キュベット払出し部材30の周りをほぼ一周(360度)した後、反転点1133で向きが反転し、その反転点1133から、キュベット払出し部材の周りに第2のピッチを有するヘリカルねじ切り部の第2の部分1135の巻きが続く。例えば、第2の部分1135は、キュベット払出し部材30の周りを完全に1、2、3、又は4周する。一実施形態において、第1のピッチは約9.2°〜9.6°であり、第2のピッチは約6.9°〜7.3°である。さらなる実施形態において、第1のピッチは約9.4°であり、第2のピッチは約7.1°である。
【0044】
図7A〜Cを参照すると、別の実施形態において、第2のキュベット払出し部材32は、第1のピッチを有する第1の巻き方向のヘリカルねじ切り部の第1の部分1132と、第2のピッチを有する第2の巻き方向のヘリカルねじ切り部の第2の部分1136とを有する。ヘリカルねじ切り部の第1の部分1132は、キュベット払出し部材30の周りをほぼ一周(360度)した後、反転点1134で向きが反転し、その反転点1134から、キュベット払出し部材の周りに第2のピッチを有するヘリカルねじ切り部の第2の部分1136の巻きが続く。例えば、第2の部分1136は、キュベット払出し部材30の周りを完全に1、2、3、又は4周する。一実施形態において、第1のピッチは約9.2°〜9.6°であり、第2のピッチは約6.9°〜7.3°である。さらなる実施形態において、第1のピッチは約9.4°であり、第2のピッチは約7.1°である。
【0045】
本明細書で使用されているように、ヘリカルねじ切り部31、33のピッチとは、ヘリカルねじ切り部と、ヘリカルねじ切り部31、33と交わる平面であって、キュベット払出し部材30、32の長手方向軸に垂直な平面との間に形成される角度を意味する。
【0046】
図3A〜3Bに示されるとおり、本発明の一実施形態によれば、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は、キュベット積層列120の軸と平行な軸上で回転する。別の実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は、キュベット積層列120と垂直な軸を中心として回転する。
【0047】
さらに図3A〜Bを参照すると、キュベット払出し部材30、32は、各々回転部材42と接続される。例えば、一実施形態において、例示的回転部材は図3A〜Bに示されるとおりの歯車42である。歯車42は、歯車42の回転、ひいてはキュベット払出し部材30の回転を生じさせることが可能なモータ(図示せず)、例えば振動モータと動作可能に接続される。例えば、一実施形態において、第1のキュベット払出し部材30はアクスル46によって第1の回転部材42と接続され、第2のキュベット払出し部材32はアクスル48によって第2の回転部材44と接続される。
【0048】
第1の回転部材42及び第2の回転部材44は、一実施形態において、各々時計回り又は反時計回りのいずれの方向にも回転可能であり、それによりそれぞれ第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転を生じさせる。例えば、一実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は、各々同じ方向、例えば時計回りに、或いは反時計回りに、回転する。
【0049】
さらに別の実施形態において、第1のキュベット払出し部材30は第2のキュベット払出し部材32と反対方向に回転する。例えば、第1のキュベット払出し部材30が時計回りの方向に回転し、一方、第2のキュベット払出し部材32が反時計回りの方向に回転する。或いは、別の実施形態において、第1のキュベット払出し部材30が反時計回りの方向に回転し、一方、第2のキュベット払出し部材32が時計回りの方向に回転する。
【0050】
さらに別の実施形態において、第1のキュベット払出し部材30が第1の時間周期にわたり第1の方向、例えば時計回りに回転し、一方、第2のキュベット払出し部材32が第1の時間周期にわたり第2の方向、例えば反時計回りに回転し、その後、第1のキュベット払出し部材30が反転して第2の時間周期にわたり第2の方向に回転し、同時に第2のキュベット払出し部材32も反転して第2の時間周期にわたり第1の方向に回転する。
【0051】
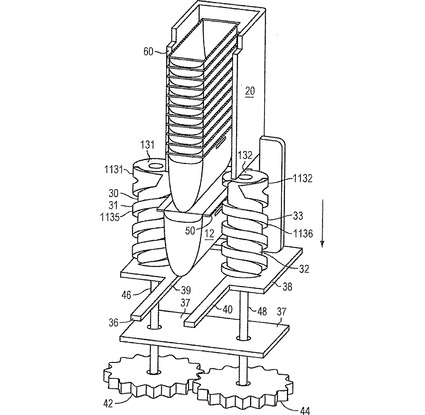
図8A〜Cは、キュベットの積層列からキュベットをキュベット供給シュートに払い出すためのキュベット払出し部材の斜視図である。例示的な第1のキュベット払出し部材30及び第2のキュベット払出し部材32はねじ切りされており、回転することによりキュベット12と係合してそれを積層列120から外し取る。本発明の例示的実施形態によれば、キュベット12がキュベット払出し部材30、32を完全に通り抜けると、キュベット12はキュベット移送位置36に供給される。上記に考察されるとおり、本発明の一実施形態によれば、キュベットシャッター22が開くと、キュベット12の積層列は下方に移動し、最終的にキュベット積層列120のうち最下位のキュベット12が第1のキュベット払出し部材30及び第2のキュベット払出し部材32の上に載置されることになる。キュベット供給センサ58がキュベット12、例えば最下位のキュベット12の存在を検知し、第1のキュベット払出し部材30及び第2のキュベット払出し部材32が回転し始め、それによりキュベット12が積層列120から払い出される。
【0052】
図8Aに示されるとおり、本発明の方法の一実施形態によれば、上記で図6A〜C及び図7A〜Cに関して説明される第1のキュベット払出し部材30及び第2のキュベット払出し部材32は、回転してキュベット12のリップ50と係合することにより、キュベットの積層列120からのキュベット12の分離を生じさせる。或いは、一実施形態において、第2のキュベット払出し部材32が静止している状態で第1のキュベット払出し部材30が回転する;第1のキュベット払出し部材30の回転が止まると、第2のキュベット払出し部材32が回転する。さらに別の実施形態において、第1のキュベット払出し部材30は第2のキュベット払出し部材32と同時に回転する。
【0053】
さらなる実施形態において、第1のキュベット払出し部材30は第1の方向、例えば時計回りに回転し、一方、第2のキュベット払出し部材は第2の方向、例えば反時計回りに回転し、それによってキュベット12のリップ50と係合してキュベット12を積層列120から分離する。さらに別の実施形態において、第1のキュベット払出し部材30は第1の方向、例えば時計回りに回転することで、キュベット12のリップ50と係合するとともにキュベット12のキュベット移送位置36への払い出しも行い、一方、第2のキュベット払出し部材32は第2の方向、例えば反時計回りに回転することで、キュベット12のリップ50と係合するとともにキュベット12のキュベット移送位置36への払い出しも行う。さらなる実施形態において、第1のキュベット払出し部材30は第1の方向、例えば時計回りに回転し、一方、第2のキュベット払出し部材は第2の方向、例えば反時計回りに回転し、それによってキュベット12のリップ50と係合してキュベット12を積層列120から分離する;次に、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は各々その回転方向を反転させ、それによってキュベット12をキュベット移送位置36に払い出す。
【0054】
引き続き図8Aを参照すると、本発明の一実施形態によれば、第1のキュベット払出し部材30は、第1のキュベット払出し部材30の上部分131を始点とする第1の巻き方向(例えば、左巻き)の第1の部分1131を有するヘリカルねじ切り部31を有する。第2のキュベット払出し部材32もまた、第2のキュベット払出し部材32の上部分132を始点とする第2の巻き方向(例えば、右巻き)の第1の部分1132を有するヘリカルねじ切り部33を有する。第1のキュベット払出し部材30は第1の方向(例えば、時計回り)に回転し、且つ左側のキュベット払出し部材32は第2の方向(例えば、反時計回り)に回転し、それによってキュベット12と係合して積層列120から払い出す。
【0055】
一実施形態によれば、キュベット12が積層列120から払い出されると、第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転は反転する。一実施形態において、キュベット12が、第1のキュベット払出し部材30における第1の巻き方向(例えば、左巻き)のヘリカルねじ切り部分1131と第2の巻き方向のねじ切り部(例えば、右巻き)の部分1135との間の反転点1133、及び第2のキュベット払出し部材32における第2の巻き方向(例えば、右巻き)のねじ切り部分l132と第1の巻き方向(例えば、左巻き)のねじ切り部分1136との間の反転点1134に係合すると、第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転が反転する。その時点で、例えば、第1のキュベット払出し部材30は方向を変えて第2の方向(例えば、反時計回り)に回転し、第2のキュベット払出し部材32は方向を変えて第1の方向(例えば、時計回り)に回転する。回転が変わることにより、第1のキュベット12がキュベット移送位置36に送出される前に第2のキュベット12が供給されることが防止される。
【0056】
図8Bに示されるとおり、第1のキュベット払出し部材30のヘリカルねじ切り部31及び第2のキュベット払出し部材32のヘリカルねじ切り部33は、キュベット12がキュベットの積層列120から払い出された後、キュベット12がキュベット払出し部材30、32によってキュベット移送位置36に向かって下方向に移動する間にも、キュベット12のリップ50と係合し続ける。一実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32はキュベット12の側壁56のリップ50と係合し、一方、別の実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32はキュベット12の端壁58のリップ50と係合する。
【0057】
引き続き図8Aを参照すると、さらなる実施形態によれば、第1のキュベット払出し部材30のヘリカルねじ切り部31及び第2のキュベット払出し部材32のヘリカルねじ切り部33によってキュベット12に力が及ぼされることにより、キュベット12の突起52がキュベットの積層列120から外れる。例えば、一実施形態において、回転している第1のキュベット払出し部材30の第1の巻き方向(例えば、左巻き)のヘリカルねじ切り部分1131及び第2のキュベット払出し部材32の第2の巻き方向(例えば、右巻き)のヘリカルねじ切り部分1132によって下方に力が及ぼされることにより、キュベット12の壁の凹部54が、積層列120において隣接するキュベット12の突起52から外れる。
【0058】
図8A及び8Bの双方を参照すると、第1の回転部材30及び第2の回転部材32が回転し続けると、図8Aの方向矢印によって示されるとおり、キュベット12は第1の回転部材30のヘリカルねじ切り部31及び第2の回転部材32のヘリカルねじ切り部33に従って下方向に移動する。例えば、一実施形態において、キュベット12が積層列120から払い出されると、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は回転方向を反転させて、キュベットの下方向への移動をさらに促進する。
【0059】
引き続き図8A及び8Bを参照すると、一実施形態において、第1のキュベット払出し部材30は、上部分1131と下部分1135とを有するヘリカルねじ切り部31を有する。上部分1131は第1の巻き方向(例えば、左巻き)を有し、下部分1135は第2の巻き方向(例えば、右巻き)を有する。第1の巻き方向は反転点1133で第2の巻き方向に反転する。第2のキュベット払出し部材32もまた、上部分1132と下部分1136とを有するヘリカルねじ切り部33を有する。上部分1132は第1の巻き方向(例えば、右巻き)を有し、下部分1136は第2の巻き方向(例えば、左巻き)を有する。第1の巻き方向は反転点1134で第2の巻き方向に反転する。第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転方向が反転すると、このときキュベット12は、一実施形態において、第1のキュベット払出し部材30のヘリカルねじ切り部31の下部分1135及び第2のキュベット払出し部材32のヘリカルねじ切り部33の下部分1136に従い、キュベット移送位置36に向かって下方向に移動する。
【0060】
図5Cは、図5Bに示されるキュベットディスペンサの断面図であり、一方、図8Cは、そのキュベットディスペンサの斜視図を示す。本発明の一例示的実施形態に従い、キュベットの積層列からのキュベットが、例示的キュベット払出し部材からキュベット移送位置に払い出されている。本発明の一実施形態によれば、キュベット移送位置36は第1のキュベット払出し部材30及び第2のキュベット払出し部材32の真下に、且つそれらの間に位置する。図3Aに示されるとおり、キュベット払出し部材30、32は基台38に載置されている。一実施形態において、キュベット移送位置36は、基台38から出る第1の突起39及び第2の突起40を含む。空間37が第1の突起39を第2の突起40と分離している。例えば、本発明の一実施形態によれば、空間37がキュベット12の本体を受け入れ、一方、キュベット12のリップ50が第1の突起39及び第2の突起40に載置される。
【0061】
再び図4を参照して、キュベット12がキュベット移送位置36に配置されると、キュベット移送センサ48がキュベット12の存在を検知し、第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転を停止させる。これにより、現在キュベット移送位置36を占有しているキュベット12が取り除かれるまで、別のキュベット12によってキュベット移送位置36が占有されることが防止される。さらなる実施形態において、キュベット12がキュベット移送位置36に存在すると、キュベット移送センサ48は、例えばロボットアーム(図示せず)に信号を送り、それによりキュベット12が移送位置36から移され、キュベット搬送カルーセル1に置かれる。
【0062】
本発明の一実施形態によれば、キュベット12がキュベット移送位置36から移されると、キュベット移送センサ48はキュベット12の不在を検知し、第1のキュベット払出し部材30及び第2のキュベット払出し部材32に信号を送って回転させ、別のキュベット12をキュベット移送位置36に提供する。キュベット供給シュート20のキュベットの積層列120が供給され終わると、キュベット供給センサ56がキュベット12の不在を検知し、それによりキュベット積層列センサ400がキュベットの積層列120を検知するまでキュベット装填モジュール14が回転し、この時点でキュベット12の供給プロセスは、先に考察されたとおり進行する。
【0063】
別の態様において、本発明は、回転キュベットカルーセル1などの、自動臨床試料分析器内のコンベヤに複数のキュベット12を自動的に装填する方法である。例えば、一実施形態において、まず初めに操作者がキュベットの積層列120をキュベット装填モジュール14のスロット16に装填する。モジュール14は、キュベット積層列センサ400がキュベットシャッター22上にキュベットの積層列120の存在を検知するまで回転する。
【0064】
キュベットの積層列120がキュベットシャッター22上に配置されると、キュベットシャッター22が開き、キュベットの積層列120がキュベットシュート20に落下して、積層列120の最下位のキュベット12が第1のキュベット払出し部材30及び第2のキュベット払出し部材32の上に載置される。キュベット供給センサ56がキュベット積層列120の存在を検知し、それにより第1のキュベット払出し部材30及び第2のキュベット払出し部材32が回転することでキュベット12と係合して積層列120から払い出し、キュベットをキュベット移送位置36に送出する。
【0065】
一実施形態において、第1のキュベット払出し部材30が第1の方向、例えば時計回りに回転し、一方、第2のキュベット払出し部材32が第2の方向、例えば反時計回りに回転し、それによりキュベット12と係合する;次に第1のキュベット払出し部材30が方向を切り換えて第2の方向に回転し、一方、第2のキュベット払出し部材32が方向を切り換えて第1の方向に回転し、それによりキュベット12をキュベット移送位置36に払い出す。別の実施形態において、第1のキュベット払出し部材30は第1の方向、例えば時計回りに回転することで、キュベット12と係合するとともにキュベット12のキュベット移送位置36への払い出しも行い、一方、第2のキュベット払出し部材32は第2の方向、例えば反時計回りに回転することで、キュベット12と係合するとともにキュベット12のキュベット移送位置36への払い出しも行う。
【0066】
キュベット12がキュベット移送位置36に載置されると、キュベット移送センサ58が、例えばロボットアーム(図示せず)に信号を送り、それによりキュベット12が移送位置36から移され、キュベット搬送カルーセル1のスロット2に置かれる。
【0067】
本明細書に記載されるものの変形例、修正例、及び他の実施態様が、当業者には特許請求される本発明の趣旨及び範囲から逸脱することなく想起されるであろう。従って、本発明は先述の例示的説明によって定義されるのではなく、以下の特許請求の範囲の趣旨及び範囲によって定義される。
【技術分野】
【0001】
発明の分野
本発明は、自動臨床試料分析器に使用されるキュベット(容器)を保管及び供給するための装置及び方法に関する。
【背景技術】
【0002】
発明の背景
臨床試料自動分析器は、病院及び研究機関において多量の試料を分析するために日常的に用いられている。自動試料分析器を使用して、例えば、水などの環境標本、又は血液、尿若しくは他の生体試料などの患者検体を検査し、例えば汚染物質又は分析物の濃度を測定することができる。
【0003】
自動試料分析器は様々な構成要素システムを有し、それらが連携して動作することにより患者試料が処理される。例えば、自動試料分析器は、1つ又は複数の試薬分注構成要素、試料保持容器供給構成要素、試料及び試薬プローブ、洗浄ステーション、検出機構、及び試料をあるステーションから別のステーションに移動させるための自動化されたアーム、カルーセル、又はコンベヤを有し得る。
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動試料分析器によって試料に対する分析の実施にかかる時間が短縮され、出力結果が向上し、且つ人為的エラー及び汚染が低減されるため、費用効果の高い試料分析が提供される。しかしながら、かかる分析器は機能が自動化されているにも関わらず、構成要素が正常に機能しない場合、又は試薬及び試料保持容器などの消耗品を交換しなければならない場合、操作者の介入を必要とすることが多い。従って当該技術分野では、操作者が介入する必要が低減され、それによって効率性、検査の正確性、及び処理能力がさらに向上した自動試料分析器が必要とされている。
【課題を解決するための手段】
【0005】
発明の概要
本発明は、自動臨床試料分析器に使用される試料保持容器を供給するための機器及び方法に関する。一態様において、本発明は、試料保持容器の積層列から試料保持容器を分離するための装置に関する。本装置は、少なくとも2つの試料保持容器の積層列を受け支えるための支持部材と、少なくとも1つの払出し部材、好ましくは2つの払出し部材とを含む。支持部材は、試料保持容器の積層列にある試料保持容器のうち少なくとも1つを第1の払出し部材と第2の払出し部材との間に案内するように配置される。第1の払出し部材及び第2の払出し部材は各々、ヘリカルねじ切り部を含む。第1の払出し部材は、時計回りの方向に回転可能な第1の回転体と動作可能に接続される。第2の払出し部材は、反時計回りの方向に回転可能な第2の回転体と動作可能に接続される。第1の回転体及び第2の回転体は第1の払出し部材及び第2の払出し部材を回転させ、それによって少なくとも2つの試料保持容器のうちの1つが試料保持容器の積層列から払い出される。さらなる実施形態において、第1の回転体はさらに反時計回りの方向に回転可能であり、一方、第2の回転体はさらに時計回りの方向に回転可能である。一実施形態において、回転体は振動モータを備え得る。
【0006】
本発明によれば、一実施形態において、払出し部材はねじ切りされる。例えば、一実施形態において、第1の払出し部材が右巻き方向のヘリカルねじ切り部を有し、第2の払出し部材が左巻き方向のヘリカルねじ切り部を有する。一実施形態において、右巻きヘリカルねじ切り部のピッチは左巻きヘリカルねじ切り部のピッチと同じである。或いは、一方のヘリカルねじ切り部のピッチは他方のヘリカルねじ切り部のピッチと異なる。ピッチは、一実施形態では約6.9°〜7.3°の範囲であり、一方、別の実施形態では、ピッチは約9.2°〜9.6°の範囲である。さらなる実施形態において、ピッチは約9.4°であり、一方、別の実施形態において、ピッチは約7.1°である。
【0007】
さらに別の実施形態において、第1の払出し部材は右巻き方向のヘリカルねじ切り部と左巻き方向のヘリカルねじ切り部とを有する。第2の払出し部材もまた、右巻き方向のヘリカルねじ切り部と左巻き方向のヘリカルねじ切り部とを有する。一実施形態によれば、第1の払出し部材の右巻きヘリカルねじ切り部のピッチは、第1の払出し部材の左巻きヘリカルねじ切り部のピッチと異なる。例えば、右巻きヘリカルねじ切り部のピッチは約6.9°〜7.3°の範囲であり、一方、左巻きヘリカルねじ切り部のピッチは約9.2°〜9.6°の範囲である。さらなる実施形態において、右巻きヘリカルねじ切り部のピッチは約7.1°であり、一方、左巻きヘリカルねじ切り部のピッチは約9.4°である。
【0008】
さらなる実施形態において、第1の払出し部材は略円筒形であり、第2の払出し部材と同じ直径を有する。別の実施形態において、第1の払出し部材の直径は第2の払出し部材の直径と異なる。さらに別の実施形態において、払出し部材は上部を最大幅部分として縮径しており、或いは最大幅部分は底部にある。
【0009】
本発明の一実施形態によれば、本発明に係る装置はまた、試料保持容器受けも含む。例えば、試料保持容器受けは、第1の試料保持容器が第2の試料保持容器から分離された後、その試料保持容器を受け支える。
【0010】
別の実施形態において、少なくとも2つの試料保持容器の積層列を受け支えるための支持部材は筒体であり、一方、別の実施形態において、支持部材は少なくとも2つの壁を備え、各壁がC字型断面を有する。
【0011】
本装置は、一実施形態によれば、回転モジュール、例えば、ホイール、ディスク、又はシリンダをさらに備え、これは試料保持容器の積層列を支持するための複数の開口を有する。一実施形態において、複数の開口の各々は、カルーセルの中心から等距離に、且つ互いに等距離に配置される。さらに別の実施形態において、複数の開口は回転カルーセルの周囲に配置される。
【0012】
別の態様によれば、本発明は、試料保持容器の積層列から試料保持容器を分離するための方法を含む。本方法は、少なくとも2つの試料保持容器の積層列を、ヘリカルねじ切り部を備える第1の払出し部材に隣接して配置すること、第1の払出し部材を第1の方向に回転させること、前記試料保持容器を係合すること;試料保持容器の積層列から第1の試料保持容器を切り離すこと;第1の払出し部材を第2の方向に回転させること;及び試料保持容器の積層列から試料保持容器を払い出すことを含む。
【0013】
さらなる実施形態において、本方法は、試料保持容器の積層列を第2の払出し部材に隣接して配置することを含む。例えば、この払出し部材はヘリカルねじ切り部を含む。一実施形態において、第1の払出し部材は右巻き方向のヘリカルねじ切り部を有し、第2の払出し部材は左巻き方向のヘリカルねじ切り部を有する。さらなる実施形態において、第1の払出し部材は左巻き方向のヘリカルねじ切り部も含み、一方、第2の払出し部材は右巻き方向のヘリカルねじ切り部も含む。
【0014】
一実施形態において、本方法は、前記第1の払出し部材を第1の方向に回転させるステップを実施しながら、前記第2の払出し部材を第2の方向に回転させることを含む。別の実施形態において、本方法は、前記第1の払出し部材を第2の方向に回転させるステップを実施しながら、前記第2の払出し部材を第1の方向に回転させることを含む。一実施形態において、第1の方向が時計回りの方向であり、第2の方向が反時計回りの方向である。別の実施形態において、第1の払出し部材から試料保持容器を払い出しながら、同時に第2の払出し部材から試料保持容器を払い出すステップ。
【図面の簡単な説明】
【0015】
図面の簡単な説明
【図1】本発明の例示的実施形態に係る、キュベット供給ステーションを有する自動試料分析器の上面平面図である。
【図2】本発明の例示的実施形態に係る、試料を保持し、且つキュベット供給ステーションから供給するためのキュベットの斜視図である。
【図3A】本発明の例示的実施形態に係る、キュベットの積層列を収容するためのキュベット装填モジュールを上部分に含む自動試料分析器のキュベットディスペンサの平面図である。
【図3B】本発明の一例示的実施形態に係る、図3Aに示されるとおりの自動試料分析器のキュベットディスペンサの斜視図であり、キュベット装填モジュールを係合して回転させるための係合部品を見せるため、キュベット装填モジュールが取り除かれている。
【図4】本発明の一例示的実施形態に係る、キュベットディスペンサを通じたキュベットの移動を始動させるための数個のセンサを含む自動試料分析器のキュベットディスペンサの斜視図である。
【図5A】本発明の一例示的実施形態に係る、キュベットがキュベット供給シュートに払い出されて配給される前にキュベットの積層列を収納しているキュベット装填モジュールの断面図である。
【図5B】本発明の一例示的実施形態に係る、図5Aのキュベット装填モジュールの断面図を含むキュベットディスペンサの断面図であり、ここでは図5Aに示されるキュベットの積層列がキュベット供給シュートに払い出されている。
【図5C】本発明の一例示的実施形態に係る、図5Bに示されるキュベットディスペンサの断面図であり、ここではキュベットの積層列からのキュベットがキュベット払出し部材からキュベット移送位置まで払い出されている。
【図6】(A)〜(C)は本発明の一実施形態に係る払出し部材が時計回りの方向に回転するときの斜視図である。
【図7】(A)〜(C)は本発明の一実施形態に係る払出し部材が反時計回りの方向に回転するときの斜視図である。
【図8A】本発明の例示的実施形態に係る、キュベット供給シュート内のキュベットの積層列からキュベットを払い出すためのキュベット払出し部材の斜視図であり、ここでキュベット払出し部材はねじ切りされており、回転してキュベットと係合することにより積層列からキュベットを外し取り、それをキュベット移送位置に供給する。
【図8B】本発明の例示的実施形態に係る、キュベット供給シュート内のキュベットの積層列からキュベットを払い出すためのキュベット払出し部材の斜視図であり、ここでキュベット払出し部材はねじ切りされており、回転してキュベットと係合することにより積層列からキュベットを外し取り、それをキュベット移送位置に供給する。
【図8C】本発明の例示的実施形態に係る、キュベット供給シュート内のキュベットの積層列からキュベットを払い出すためのキュベット払出し部材の斜視図であり、ここでキュベット払出し部材はねじ切りされており、回転してキュベットと係合することにより積層列からキュベットを外し取り、それをキュベット移送位置に供給する。
【発明を実施するための形態】
【0016】
発明の詳細な説明
自動試料分析器は、汚染物質又は分析物など、試料中の物質を検出するために使用される。例えば、試料は土壌若しくは水試料などの環境試料であることもあり、又は試料は、血液若しくは尿試料など、ヒト若しくは動物患者に由来することもある。自動試料分析器は所定のプロトコルに従い試料を分析でき、そうしたプロトコルとしては、例えば、試料保持容器の提供、試料の提供、試薬の添加、試料の吸引、及び試料の内容物の検出を挙げることができる。
【0017】
本明細書に記載されるとおりの本発明は、自動試料分析器で使用されるキュベットディスペンサを開示する。キュベットディスペンサは、本発明によれば、操作者のディスペンサへの介入を低減するような方法で試料保持容器を供給する。本発明によれば、操作者がキュベットディスペンサに試料保持容器を装填した後、キュベットディスペンサは必要に応じて個々の試料保持容器を自動試料分析器に配給する作業を処理し、そのため操作者が介入する必要性が低減される。さらに、このキュベット供給機構は機能不良を低減するよう設計され、従ってキュベットディスペンサ及び自動試料分析器の効率性が向上する。
【0018】
自動試料分析器
図1は、本発明の例示的実施形態に係る、キュベット装填ステーションを有する自動試料分析器の上面図である。本発明の一例示的実施形態によれば、自動試料分析器11は、キュベット搬送カルーセル1に隣接して配置されたキュベット供給ステーション10を有する。キュベット供給ステーション10が空のキュベット12(図示せず)を供給すると、そのキュベット12をキュベット移送アーム14(図示せず)が拾い上げ、キュベット供給ステーション10からキュベット搬送カルーセル1に移送する。
【0019】
本発明に係る例示的試料キュベット12が図2に示される。一実施形態によれば、キュベット12は、2つの側壁56と2つの端壁58とを有する容器である。さらなる実施形態において、キュベット12は、キュベット12の開口51の周りに延在するリップ又はフランジ50を有する。例えば、一実施形態ではリップ50は側壁56から約90°で突出し、一方、別の実施形態ではリップ50は端壁58から約90°で突出している。或いは、リップ50は開口51の全周にわたって延在してもよい。
【0020】
引き続き図2を参照すると、さらなる実施形態において、キュベット12は側壁56に、別のキュベット12にある溝、穴又は凹部54を係合するための突起52を有する。さらに別の実施形態において、キュベット12は、第1の側壁56に第1の突起52を、及び第2の側壁56に第2の突起52を有する。別の実施形態において、キュベット12は側壁56に、別のキュベット12の突起52によって係合される溝、穴又は凹部54を有する。さらに別の実施形態において、キュベット12は、第1の側壁56に第1の凹部54を、及び第2の側壁56に第2の凹部54を有する。例えば、第1のキュベット12が第2のキュベット12に挿入されると、第1のキュベットの第1の突起52が、第2のキュベット12の第1の側壁56にある溝54に係合し、第1のキュベット12にある第2の突起52が、第2のキュベット12の第2の側壁56にある溝54に係合し、それによって第1のキュベット12が第2のキュベット12と離脱可能に固定され、キュベットの積層列120を形成する。
【0021】
本明細書で使用されているように、キュベットの積層列120とは、互いに離脱可能に連結されている少なくとも2つのキュベット12を意味する。離脱可能に連結されているとは、2つのキュベットが連結されているとき、下のキュベット12を上のキュベット12から分離させるには、地球の重力単独では十分でなく、下のキュベット、すなわち第1のキュベットを上のキュベット、すなわち第2のキュベットから分離させる外部からの力を加える必要があることを意味する。積層列中のキュベットの数は、例えば、2〜500個、好ましくは10、20、25、30、50、又は100個であり得る。
【0022】
別の実施形態において、キュベット12は端壁58に突起52を有し、一方さらなる実施形態において、キュベット12は端壁58に、溝、穴又は凹部54を有する。異なる実施形態において、キュベット12は、第1の端壁58に第1の突起52と第1の凹部54とを、及び第2の端壁58に第2の突起52と第2の凹部54とを有する。
【0023】
再び図1を参照すると、キュベット搬送カルーセル1はキュベット12を収容するための一連のスロット2を有する。本発明の一実施形態によれば、キュベット搬送カルーセル1は時計回り及び反時計回りのいずれの方向にも回転し、それによりスロット2に保持されたキュベット12を、自動試料分析器においてキュベット搬送カルーセル1に隣接する種々のステーションに配置できる。例えば、一実施形態において、キュベット搬送カルーセル1は回転してキュベット12を試料ピペットロボット5の近傍に配置し、それにより試料ピペットロボット5が試料を試料カルーセル(図示せず)からキュベット12に分注できるようにする。
【0024】
別の実施形態において、キュベット搬送カルーセル1は回転してキュベット12を試薬分注ステーション7に配置する。試薬分注ステーションでは、本発明の一実施形態によれば、例えば、緩衝液又は抗原若しくは抗体が結合している磁性粒子などの1つ又は複数の試薬(図示せず)が、1本又は複数の試薬ピペット(図示せず)によって試料キュベット12に分注される。
【0025】
さらなる実施形態において、キュベット搬送カルーセル1は回転してキュベット12を磁性粒子洗浄ステーション4に配置する。キュベット12がキュベット搬送カルーセル1から移され、そこで、試薬分注ステーション7でキュベット12に添加された磁気ビーズが、同時出願の「Magnetic Particle Washing Station」と題される米国特許出願(代理人整理番号第INL−099号)に記載される方法に従い洗浄される。
【0026】
さらに別の実施形態において、キュベット搬送カルーセル1は回転してキュベット12を分析ステーション6の近傍に配置する。例えば、一実施形態において本発明によれば、分析ステーションは発光測定装置6である。キュベット12がキュベット搬送カルーセル1から移され、1つずつ発光測定装置6の内部に配置される。一実施形態において、発光測定装置6は、例えば、試料中の標的分子を計測する化学発光分析を実施するための外光が入らない遮光環境を提供する。
【0027】
キュベットディスペンサ
図3Aは、本発明の例示的実施形態に係る自動試料分析器のキュベットディスペンサの斜視図であり、キュベットの積層列を収容するためのキュベット装填モジュールを含み、一方、図3Bは、本発明の一例示的実施形態に係る、図3Aに示されるとおりの自動試料分析器のキュベットディスペンサの斜視図であるが、キュベット装填モジュールと係合して回転させるための係合部品を見せるため、キュベット装填モジュールは取り除かれている。
【0028】
図3A〜Bに示されるとおり、一実施形態によれば、キュベットディスペンサ10は、キュベット装填モジュール14と、キュベット供給シュート20と、1つ又は複数のキュベット払出し部材30、32と、キュベット移送位置36とを含む。キュベット装填モジュール14は、キュベットの積層列120を保持するための複数のスロット16を有する。キュベット供給シュート20はキュベット装填モジュール14からキュベットの積層列120を受け取り、それらを1つ又は複数のキュベット払出し部材30、32に提供する。キュベット払出し部材30、32はキュベットの積層列120から個々のキュベット12を分離し、個々のキュベット12を1つずつキュベット移送位置36に供給する。
【0029】
本発明の一実施形態によれば、キュベット装填モジュールはキュベット供給シュート20及びキュベット払出し部材30、32の上方に配置される。一実施形態において、キュベット装填モジュール14は円形であり、例えば、ホイール、ディスク、又はシリンダである。さらなる実施形態において、キュベット装填モジュール14は、キュベットの積層列120を収容するための、モジュール14の上部13からモジュール14の底部24まで延在する複数の垂直方向のスロット16を有する。モジュール14は、例えば、15、20、又は25本のスロット16を有する。各スロット16は、2つの側壁18を含む。スロット16の側壁18は後壁21に当接する。本発明の一実施形態によれば、各スロット16は円形モジュール14の中心から等距離に離間される。さらなる実施形態において、各スロット16はモジュール14の全周にわたって等しく配分される。
【0030】
キュベット装填モジュール14のさらなる実施形態において、各側壁18はキュベットの積層列120を拘束するためのリップ17を有する。別の実施形態において、第1の側壁のリップ17と第2の側壁18のリップ17との間に間隙23がある。この間隙23により、操作者はスロット16が空か否か、又はキュベット12が充填されているか否かを確認することができ、従って操作の利便性が向上する。さらなる実施形態において、後壁21は、センサ(図示せず)がキュベット12の存在又は不在を検知できるようにするための窓19を含む。
【0031】
一実施形態によれば、キュベット装填モジュール14は中心軸の周りに回転する。モジュール14は基板360上に載置され、中心ピン34と係合する。ピン34はモータ(図示せず)と、例えばアクスル又はシャフトによって動作可能に接続される。ピン34が回転することによりモジュール14が回転し、キュベットの積層列120がキュベットシャッター22の上に配置される。一実施形態において、モジュール14が回転する間、基板360は静止したままである。さらなる実施形態において、基板360はキュベット積層列120の底部を支持する。
【0032】
図4は、本発明の一例示的実施形態に係る自動試料分析器のキュベットディスペンサの斜視図であり、キュベットディスペンサを通じたキュベットの移動を始動させるための数個のセンサが示される。一実施形態において、キュベット積層列センサ400が基板360に固定される。本発明の別の実施形態によれば、キュベット積層列センサ400は、スロット16におけるキュベットの積層列120の存在又は不在を検知する。例えば、一実施形態において、キュベット積層列センサ400は、スロット16の後壁21にある窓19を介してキュベット積層列120の存在又は不在を検知する。例えば、スロット16にキュベットが検知されない場合、センサ400がキュベット積層列120の不在を検知し、キュベット装填モジュール14が回転してキュベットの積層列120をキュベットシャッター22上に配置する。
【0033】
図5Aは、本発明の一例示的実施形態に係る、キュベットがキュベット供給シュートに払い出されて配給される前にキュベットの積層列を収納しているキュベット装填モジュールの断面図である。図5Aに示されるとおり、キュベット積層列120がキュベットシャッター22上に配置されると、キュベット積層列センサ400がキュベットを検知し、キュベットシャッター22を作動させて開ける。一実施形態において、キュベットシャッター22は基板360の平面で旋回してキュベットシュート20を開閉し、これは以下でさらに詳細に説明される。別の実施形態において、キュベットシャッター22は基板360と平行でない平面で旋回する。例えば、キュベットシャッター22は、一実施形態において、基板360と平行な平面から基板360と略垂直な平面まで開くドアである。
【0034】
図5Bは、キュベットディスペンサの断面図である。本発明の一例示的実施形態に従い、図5Aに示されるキュベットの積層列がキュベット供給シュートに払い出されている。キュベットシャッター22が開くと、例えば、キュベット積層列120はキュベット装填モジュール14からキュベット供給シュート20の中に落下する。この時点で、積層列の最下位にあるキュベット12が第1のキュベット払出し部材30及び第2のキュベット払出し部材32の上に載置され、一方、残りのキュベットはシュート20によって支持される。
【0035】
本発明の一実施形態によれば、シュート20は筒体、例えば、矩形筒体、四角形筒体又は円筒形筒体であり、複数のキュベット12、例えばキュベットの積層列120を受け支えるサイズ及び形状である。さらなる実施形態において、筒体20は前部分60が開放されており、一方、別の実施形態において、筒体は前部分60が閉鎖されている。別の実施形態において、シュート20は第1の平行壁28及び第2の平行壁29を含んでキュベット12を支持し、それによりシュート内のキュベット12を視認することができる。例えば、一実施形態において、キュベット供給シュート20は一対の平行壁であり、各々の断面が角括弧([ ])のような形状であることにより、壁の間にキュベットの積層列120を支持するための中空の通路を提供する。
【0036】
再び図4を参照すると、本発明の一実施形態によれば、キュベットの積層列120がキュベット供給シュート20内に存在すると、例えばキュベット供給シュート20の基部に配置されたキュベット供給センサ56が、キュベット積層列120の存在を検知する。キュベット積層列120の存在を検知すると、第1のキュベット払出し部材30及び第2のキュベット払出し部材32が回転し、キュベット積層列120からキュベット12を払い出す。キュベット供給シュート20は、キュベット12が第1のキュベット払出し部材30及び第2のキュベット払出し部材32によって積層列120から外し取られるまで、キュベット12を支持する。
【0037】
図6A〜C及び図7A〜Cは、それぞれ第1のキュベット払出し部材及び第2のキュベット払出し部材の斜視図である。図6A〜C及び図7A〜Cに示されるとおり、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は円筒形状である。一実施形態において、第1のキュベット払出し部材30は第2のキュベット払出し部材32と同じ直径を有する。別の実施形態において、第1のキュベット払出し部材30は第2のキュベット払出し部材32の直径と異なる直径を有する(図示せず)。しかしながら、代替的実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は縮径している(図示せず)。例えば、一実施形態において、テーパ状の第1のキュベット払出し部材30の最大幅部分はキュベット払出し部材30の底部であり、一方、別の実施形態において、テーパ状のキュベット払出し部材30の最大幅部分はキュベット払出し部材30の上部である。
【0038】
引き続き図6A〜C及び図7A〜Cを参照すると、本発明の一実施形態によれば、キュベット払出し部材30、32は、例えばねじの巻きのようにねじ切りされている。一実施形態によれば、第1のキュベット払出し部材30が第1の巻き方向のヘリカルねじ切り部31を有し、一方、第2のキュベット払出し部材32が第2の巻き方向のヘリカルねじ切り部33を有する。例えば、一実施形態において、第1のキュベット払出し部材30は、キュベット払出し部材30に配置された右巻き方向のヘリカルねじ切り部31を有し、一方、第2のキュベット払出し部材32は、キュベット払出し部材32に配置された左巻き方向のヘリカルねじ切り部33を有する。さらなる実施形態において、第1のキュベット払出し部材30は、キュベット払出し部材30に配置された右巻き方向のねじ切り部1135並びに左巻き方向のヘリカルねじ切り部1131を有する。さらなる実施形態において、第2のキュベット払出し部材32は、キュベット払出し部材32に配置された左巻き方向のヘリカルねじ切り部1136並びに右巻き方向のヘリカルねじ切り部1132を有する。
【0039】
代替的実施形態において、第1のキュベット払出し部材30は、第2のキュベット払出し部材32のヘリカルねじ切り部33と同じ向きのヘリカルねじ切り部31を有する。例えば、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は各々、右巻き方向のヘリカルねじ切り部31、33を有し、一方、別の実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は各々、左巻き方向のヘリカルねじ切り部31、33を有する。一実施形態において、キュベット払出し部材30、32は唯1つのねじ切り部を有し、一方、別の実施形態において、キュベット払出し部材30、32は2つ以上のねじ切り部を有する。
【0040】
引き続き図6A〜C及び図7A〜Cを参照すると、さらなる実施形態において、第1のキュベット払出し部材30は上端131に第1の巻き方向のねじ切り部1131を有する。ねじ切り部1131の向きはキュベット払出し部材30上で逆方向に変わり、第2の巻き方向のねじ切り部1135となる。ねじ切り部1131は反転点1133で方向が反転し、この反転点1133は、キュベット払出し部材30の上端131からキュベット払出し部材の底端231まで延びるキュベット払出し部材30の軸の長さに沿って約5〜45%のところにある。好ましくは、ねじ切り部1131は、キュベット払出し部材30の軸の長さに沿って約10〜35%、約15〜30%のところにある反転点1133で、又はより好ましくは約25%のところにある点で方向が反転する。例えば、一実施形態において、第1のキュベット払出し部材30は、第1のキュベット払出し部材30の上部分131又はその近傍を起点とする左巻き方向のねじ切り部1131を有する。一実施形態において、ねじ切り部の左巻き方向1131はキュベット払出し部材30の周りをほぼ一周(360度)した後、点1133で反転して右巻き方向1135となる。
【0041】
さらなる実施形態において、第2のキュベット払出し部材32は上端132に第1の巻き方向のねじ切り部1132を有する。ねじ切り部1132の向きはキュベット払出し部材32上で逆方向に変わり、第2の巻き方向のねじ切り部1136となる。ねじ切り部は反転点1134で方向が反転し、この反転点1134は、キュベット払出し部材32の上端132からキュベット払出し部材の底端232まで延びるキュベット払出し部材32の軸の長さに沿って約5〜45%のところにある。好ましくは、ねじ切り部1132は、キュベット払出し部材32の軸の長さに沿って約10〜35%、約15〜30%のところにある反転点1134で、又はより好ましくは約25%のところにある点で方向が反転する。例えば、一実施形態において、第1のキュベット払出し部材32は、第1のキュベット払出し部材32の上部分132又はその近傍を起点とする右巻き方向のねじ切り部1132を有する。一実施形態において、ねじ切り部の右巻き方向1132はキュベット払出し部材32の周りをほぼ一周(360度)した後、反転点1134で反転して左巻き方向1136となる。
【0042】
引き続き図6A〜C及び図7A〜Cを参照すると、さらなる実施形態において、第1のキュベット払出し部材30のヘリカルねじ切り部31のピッチは、第2のキュベット払出し部材32のヘリカルねじ切り部33のピッチと同じである。さらなる実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32のヘリカルねじ切り部31、33のピッチは約6°〜10°であり、及びさらなる実施形態において、ピッチは約7°である。
【0043】
図6A〜Cを参照すると、さらなる実施形態において、第1のキュベット払出し部材30は、第1のピッチを有する第1の巻き方向のヘリカルねじ切り部の第1の部分1131と、第2のピッチを有する第2の巻き方向のヘリカルねじ切り部の第2の部分1135とを有する。ヘリカルねじ切り部の第1の部分1131は、キュベット払出し部材30の周りをほぼ一周(360度)した後、反転点1133で向きが反転し、その反転点1133から、キュベット払出し部材の周りに第2のピッチを有するヘリカルねじ切り部の第2の部分1135の巻きが続く。例えば、第2の部分1135は、キュベット払出し部材30の周りを完全に1、2、3、又は4周する。一実施形態において、第1のピッチは約9.2°〜9.6°であり、第2のピッチは約6.9°〜7.3°である。さらなる実施形態において、第1のピッチは約9.4°であり、第2のピッチは約7.1°である。
【0044】
図7A〜Cを参照すると、別の実施形態において、第2のキュベット払出し部材32は、第1のピッチを有する第1の巻き方向のヘリカルねじ切り部の第1の部分1132と、第2のピッチを有する第2の巻き方向のヘリカルねじ切り部の第2の部分1136とを有する。ヘリカルねじ切り部の第1の部分1132は、キュベット払出し部材30の周りをほぼ一周(360度)した後、反転点1134で向きが反転し、その反転点1134から、キュベット払出し部材の周りに第2のピッチを有するヘリカルねじ切り部の第2の部分1136の巻きが続く。例えば、第2の部分1136は、キュベット払出し部材30の周りを完全に1、2、3、又は4周する。一実施形態において、第1のピッチは約9.2°〜9.6°であり、第2のピッチは約6.9°〜7.3°である。さらなる実施形態において、第1のピッチは約9.4°であり、第2のピッチは約7.1°である。
【0045】
本明細書で使用されているように、ヘリカルねじ切り部31、33のピッチとは、ヘリカルねじ切り部と、ヘリカルねじ切り部31、33と交わる平面であって、キュベット払出し部材30、32の長手方向軸に垂直な平面との間に形成される角度を意味する。
【0046】
図3A〜3Bに示されるとおり、本発明の一実施形態によれば、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は、キュベット積層列120の軸と平行な軸上で回転する。別の実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は、キュベット積層列120と垂直な軸を中心として回転する。
【0047】
さらに図3A〜Bを参照すると、キュベット払出し部材30、32は、各々回転部材42と接続される。例えば、一実施形態において、例示的回転部材は図3A〜Bに示されるとおりの歯車42である。歯車42は、歯車42の回転、ひいてはキュベット払出し部材30の回転を生じさせることが可能なモータ(図示せず)、例えば振動モータと動作可能に接続される。例えば、一実施形態において、第1のキュベット払出し部材30はアクスル46によって第1の回転部材42と接続され、第2のキュベット払出し部材32はアクスル48によって第2の回転部材44と接続される。
【0048】
第1の回転部材42及び第2の回転部材44は、一実施形態において、各々時計回り又は反時計回りのいずれの方向にも回転可能であり、それによりそれぞれ第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転を生じさせる。例えば、一実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は、各々同じ方向、例えば時計回りに、或いは反時計回りに、回転する。
【0049】
さらに別の実施形態において、第1のキュベット払出し部材30は第2のキュベット払出し部材32と反対方向に回転する。例えば、第1のキュベット払出し部材30が時計回りの方向に回転し、一方、第2のキュベット払出し部材32が反時計回りの方向に回転する。或いは、別の実施形態において、第1のキュベット払出し部材30が反時計回りの方向に回転し、一方、第2のキュベット払出し部材32が時計回りの方向に回転する。
【0050】
さらに別の実施形態において、第1のキュベット払出し部材30が第1の時間周期にわたり第1の方向、例えば時計回りに回転し、一方、第2のキュベット払出し部材32が第1の時間周期にわたり第2の方向、例えば反時計回りに回転し、その後、第1のキュベット払出し部材30が反転して第2の時間周期にわたり第2の方向に回転し、同時に第2のキュベット払出し部材32も反転して第2の時間周期にわたり第1の方向に回転する。
【0051】
図8A〜Cは、キュベットの積層列からキュベットをキュベット供給シュートに払い出すためのキュベット払出し部材の斜視図である。例示的な第1のキュベット払出し部材30及び第2のキュベット払出し部材32はねじ切りされており、回転することによりキュベット12と係合してそれを積層列120から外し取る。本発明の例示的実施形態によれば、キュベット12がキュベット払出し部材30、32を完全に通り抜けると、キュベット12はキュベット移送位置36に供給される。上記に考察されるとおり、本発明の一実施形態によれば、キュベットシャッター22が開くと、キュベット12の積層列は下方に移動し、最終的にキュベット積層列120のうち最下位のキュベット12が第1のキュベット払出し部材30及び第2のキュベット払出し部材32の上に載置されることになる。キュベット供給センサ58がキュベット12、例えば最下位のキュベット12の存在を検知し、第1のキュベット払出し部材30及び第2のキュベット払出し部材32が回転し始め、それによりキュベット12が積層列120から払い出される。
【0052】
図8Aに示されるとおり、本発明の方法の一実施形態によれば、上記で図6A〜C及び図7A〜Cに関して説明される第1のキュベット払出し部材30及び第2のキュベット払出し部材32は、回転してキュベット12のリップ50と係合することにより、キュベットの積層列120からのキュベット12の分離を生じさせる。或いは、一実施形態において、第2のキュベット払出し部材32が静止している状態で第1のキュベット払出し部材30が回転する;第1のキュベット払出し部材30の回転が止まると、第2のキュベット払出し部材32が回転する。さらに別の実施形態において、第1のキュベット払出し部材30は第2のキュベット払出し部材32と同時に回転する。
【0053】
さらなる実施形態において、第1のキュベット払出し部材30は第1の方向、例えば時計回りに回転し、一方、第2のキュベット払出し部材は第2の方向、例えば反時計回りに回転し、それによってキュベット12のリップ50と係合してキュベット12を積層列120から分離する。さらに別の実施形態において、第1のキュベット払出し部材30は第1の方向、例えば時計回りに回転することで、キュベット12のリップ50と係合するとともにキュベット12のキュベット移送位置36への払い出しも行い、一方、第2のキュベット払出し部材32は第2の方向、例えば反時計回りに回転することで、キュベット12のリップ50と係合するとともにキュベット12のキュベット移送位置36への払い出しも行う。さらなる実施形態において、第1のキュベット払出し部材30は第1の方向、例えば時計回りに回転し、一方、第2のキュベット払出し部材は第2の方向、例えば反時計回りに回転し、それによってキュベット12のリップ50と係合してキュベット12を積層列120から分離する;次に、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は各々その回転方向を反転させ、それによってキュベット12をキュベット移送位置36に払い出す。
【0054】
引き続き図8Aを参照すると、本発明の一実施形態によれば、第1のキュベット払出し部材30は、第1のキュベット払出し部材30の上部分131を始点とする第1の巻き方向(例えば、左巻き)の第1の部分1131を有するヘリカルねじ切り部31を有する。第2のキュベット払出し部材32もまた、第2のキュベット払出し部材32の上部分132を始点とする第2の巻き方向(例えば、右巻き)の第1の部分1132を有するヘリカルねじ切り部33を有する。第1のキュベット払出し部材30は第1の方向(例えば、時計回り)に回転し、且つ左側のキュベット払出し部材32は第2の方向(例えば、反時計回り)に回転し、それによってキュベット12と係合して積層列120から払い出す。
【0055】
一実施形態によれば、キュベット12が積層列120から払い出されると、第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転は反転する。一実施形態において、キュベット12が、第1のキュベット払出し部材30における第1の巻き方向(例えば、左巻き)のヘリカルねじ切り部分1131と第2の巻き方向のねじ切り部(例えば、右巻き)の部分1135との間の反転点1133、及び第2のキュベット払出し部材32における第2の巻き方向(例えば、右巻き)のねじ切り部分l132と第1の巻き方向(例えば、左巻き)のねじ切り部分1136との間の反転点1134に係合すると、第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転が反転する。その時点で、例えば、第1のキュベット払出し部材30は方向を変えて第2の方向(例えば、反時計回り)に回転し、第2のキュベット払出し部材32は方向を変えて第1の方向(例えば、時計回り)に回転する。回転が変わることにより、第1のキュベット12がキュベット移送位置36に送出される前に第2のキュベット12が供給されることが防止される。
【0056】
図8Bに示されるとおり、第1のキュベット払出し部材30のヘリカルねじ切り部31及び第2のキュベット払出し部材32のヘリカルねじ切り部33は、キュベット12がキュベットの積層列120から払い出された後、キュベット12がキュベット払出し部材30、32によってキュベット移送位置36に向かって下方向に移動する間にも、キュベット12のリップ50と係合し続ける。一実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32はキュベット12の側壁56のリップ50と係合し、一方、別の実施形態において、第1のキュベット払出し部材30及び第2のキュベット払出し部材32はキュベット12の端壁58のリップ50と係合する。
【0057】
引き続き図8Aを参照すると、さらなる実施形態によれば、第1のキュベット払出し部材30のヘリカルねじ切り部31及び第2のキュベット払出し部材32のヘリカルねじ切り部33によってキュベット12に力が及ぼされることにより、キュベット12の突起52がキュベットの積層列120から外れる。例えば、一実施形態において、回転している第1のキュベット払出し部材30の第1の巻き方向(例えば、左巻き)のヘリカルねじ切り部分1131及び第2のキュベット払出し部材32の第2の巻き方向(例えば、右巻き)のヘリカルねじ切り部分1132によって下方に力が及ぼされることにより、キュベット12の壁の凹部54が、積層列120において隣接するキュベット12の突起52から外れる。
【0058】
図8A及び8Bの双方を参照すると、第1の回転部材30及び第2の回転部材32が回転し続けると、図8Aの方向矢印によって示されるとおり、キュベット12は第1の回転部材30のヘリカルねじ切り部31及び第2の回転部材32のヘリカルねじ切り部33に従って下方向に移動する。例えば、一実施形態において、キュベット12が積層列120から払い出されると、第1のキュベット払出し部材30及び第2のキュベット払出し部材32は回転方向を反転させて、キュベットの下方向への移動をさらに促進する。
【0059】
引き続き図8A及び8Bを参照すると、一実施形態において、第1のキュベット払出し部材30は、上部分1131と下部分1135とを有するヘリカルねじ切り部31を有する。上部分1131は第1の巻き方向(例えば、左巻き)を有し、下部分1135は第2の巻き方向(例えば、右巻き)を有する。第1の巻き方向は反転点1133で第2の巻き方向に反転する。第2のキュベット払出し部材32もまた、上部分1132と下部分1136とを有するヘリカルねじ切り部33を有する。上部分1132は第1の巻き方向(例えば、右巻き)を有し、下部分1136は第2の巻き方向(例えば、左巻き)を有する。第1の巻き方向は反転点1134で第2の巻き方向に反転する。第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転方向が反転すると、このときキュベット12は、一実施形態において、第1のキュベット払出し部材30のヘリカルねじ切り部31の下部分1135及び第2のキュベット払出し部材32のヘリカルねじ切り部33の下部分1136に従い、キュベット移送位置36に向かって下方向に移動する。
【0060】
図5Cは、図5Bに示されるキュベットディスペンサの断面図であり、一方、図8Cは、そのキュベットディスペンサの斜視図を示す。本発明の一例示的実施形態に従い、キュベットの積層列からのキュベットが、例示的キュベット払出し部材からキュベット移送位置に払い出されている。本発明の一実施形態によれば、キュベット移送位置36は第1のキュベット払出し部材30及び第2のキュベット払出し部材32の真下に、且つそれらの間に位置する。図3Aに示されるとおり、キュベット払出し部材30、32は基台38に載置されている。一実施形態において、キュベット移送位置36は、基台38から出る第1の突起39及び第2の突起40を含む。空間37が第1の突起39を第2の突起40と分離している。例えば、本発明の一実施形態によれば、空間37がキュベット12の本体を受け入れ、一方、キュベット12のリップ50が第1の突起39及び第2の突起40に載置される。
【0061】
再び図4を参照して、キュベット12がキュベット移送位置36に配置されると、キュベット移送センサ48がキュベット12の存在を検知し、第1のキュベット払出し部材30及び第2のキュベット払出し部材32の回転を停止させる。これにより、現在キュベット移送位置36を占有しているキュベット12が取り除かれるまで、別のキュベット12によってキュベット移送位置36が占有されることが防止される。さらなる実施形態において、キュベット12がキュベット移送位置36に存在すると、キュベット移送センサ48は、例えばロボットアーム(図示せず)に信号を送り、それによりキュベット12が移送位置36から移され、キュベット搬送カルーセル1に置かれる。
【0062】
本発明の一実施形態によれば、キュベット12がキュベット移送位置36から移されると、キュベット移送センサ48はキュベット12の不在を検知し、第1のキュベット払出し部材30及び第2のキュベット払出し部材32に信号を送って回転させ、別のキュベット12をキュベット移送位置36に提供する。キュベット供給シュート20のキュベットの積層列120が供給され終わると、キュベット供給センサ56がキュベット12の不在を検知し、それによりキュベット積層列センサ400がキュベットの積層列120を検知するまでキュベット装填モジュール14が回転し、この時点でキュベット12の供給プロセスは、先に考察されたとおり進行する。
【0063】
別の態様において、本発明は、回転キュベットカルーセル1などの、自動臨床試料分析器内のコンベヤに複数のキュベット12を自動的に装填する方法である。例えば、一実施形態において、まず初めに操作者がキュベットの積層列120をキュベット装填モジュール14のスロット16に装填する。モジュール14は、キュベット積層列センサ400がキュベットシャッター22上にキュベットの積層列120の存在を検知するまで回転する。
【0064】
キュベットの積層列120がキュベットシャッター22上に配置されると、キュベットシャッター22が開き、キュベットの積層列120がキュベットシュート20に落下して、積層列120の最下位のキュベット12が第1のキュベット払出し部材30及び第2のキュベット払出し部材32の上に載置される。キュベット供給センサ56がキュベット積層列120の存在を検知し、それにより第1のキュベット払出し部材30及び第2のキュベット払出し部材32が回転することでキュベット12と係合して積層列120から払い出し、キュベットをキュベット移送位置36に送出する。
【0065】
一実施形態において、第1のキュベット払出し部材30が第1の方向、例えば時計回りに回転し、一方、第2のキュベット払出し部材32が第2の方向、例えば反時計回りに回転し、それによりキュベット12と係合する;次に第1のキュベット払出し部材30が方向を切り換えて第2の方向に回転し、一方、第2のキュベット払出し部材32が方向を切り換えて第1の方向に回転し、それによりキュベット12をキュベット移送位置36に払い出す。別の実施形態において、第1のキュベット払出し部材30は第1の方向、例えば時計回りに回転することで、キュベット12と係合するとともにキュベット12のキュベット移送位置36への払い出しも行い、一方、第2のキュベット払出し部材32は第2の方向、例えば反時計回りに回転することで、キュベット12と係合するとともにキュベット12のキュベット移送位置36への払い出しも行う。
【0066】
キュベット12がキュベット移送位置36に載置されると、キュベット移送センサ58が、例えばロボットアーム(図示せず)に信号を送り、それによりキュベット12が移送位置36から移され、キュベット搬送カルーセル1のスロット2に置かれる。
【0067】
本明細書に記載されるものの変形例、修正例、及び他の実施態様が、当業者には特許請求される本発明の趣旨及び範囲から逸脱することなく想起されるであろう。従って、本発明は先述の例示的説明によって定義されるのではなく、以下の特許請求の範囲の趣旨及び範囲によって定義される。
【特許請求の範囲】
【請求項1】
試料保持容器の積層列から試料保持容器を分離するための装置であって、
少なくとも2つの試料保持容器の積層列を受け支えるための支持部材と、
第1の払出し部材及び第2の払出し部材であって、各々がヘリカルねじ切り部を備える第1の払出し部材及び第2の払出し部材と、
を備え、
前記支持部材が、前記少なくとも2つの試料保持容器の積層列を前記第1の払出し部材と前記第2の払出し部材との間に案内するように配置され、
前記第1の払出し部材が、時計回りの方向に回転可能な第1の回転体と動作可能に接続され、前記第2の払出し部材が、反時計回りの方向に回転可能な第2の回転体と動作可能に接続され、前記第1の回転体及び前記第2の回転体が前記第1の払出し部材及び前記第2の払出し部材を回転させ、それによって前記少なくとも2つの試料保持容器のうちの1つが前記試料保持容器の積層列から払い出される、装置。
【請求項2】
前記第1の回転体がさらに反時計回りの方向に回転可能であり、前記第2の回転体がさらに時計回りの方向に回転可能である、請求項1に記載の装置。
【請求項3】
前記第1の払出し部材の前記ヘリカルねじ切り部が右巻き方向であり、前記第2の払出し部材の前記ヘリカルねじ切り部が左巻き方向である、請求項1に記載の装置。
【請求項4】
前記右巻き方向の前記ヘリカルねじ切り部が、前記左巻き方向の前記ヘリカルねじ切り部のピッチと等しいピッチを備える、請求項3に記載の装置。
【請求項5】
前記ピッチが約6.9°〜7.3°の範囲、又は約9.2°〜9.6°の範囲である、請求項4に記載の装置。
【請求項6】
前記ピッチが7.1°又は9.4°である、請求項4に記載の装置。
【請求項7】
前記第1の払出し部材が左巻き方向のヘリカルねじ切り部をさらに備え、前記第2の払出し部材が右巻き方向のヘリカルねじ切り部をさらに備える、請求項3に記載の装置。
【請求項8】
前記第1の払出し部材の前記右巻きヘリカルねじ切り部のピッチが、前記第1の払出し部材の前記左巻きヘリカルねじ切り部のピッチと異なる、請求項7に記載の装置。
【請求項9】
前記右巻きヘリカルねじ切り部の前記ピッチが約6.9°〜7.3°の範囲であり、前記左巻きヘリカルねじ切り部の前記ピッチが約9.2°〜9.6°の範囲である、請求項8に記載の装置。
【請求項10】
前記右巻きヘリカルねじ切り部の前記ピッチが約9.4°であり、前記左巻きヘリカルねじ切り部の前記ピッチが約7.1°である、請求項8に記載の装置。
【請求項11】
前記第1の回転体又は前記第2の回転体が振動モータを備える、請求項1に記載の装置。
【請求項12】
前記第1の試料保持容器を前記第2の試料保持容器と分離した後に前記試料保持容器を受け支えるための試料保持容器受けをさらに備える、請求項1に記載の装置。
【請求項13】
前記支持部材が筒体を備える、請求項1に記載の装置。
【請求項14】
前記支持部材の上方に配置される回転モジュールであって、試料保持容器の積層列を支持するための複数の開口を備える回転モジュールをさらに備える、請求項1に記載の装置。
【請求項15】
前記複数の開口の各々が、前記回転モジュールの中心から等距離に、且つ互いに等距離に配置される、請求項14に記載の装置。
【請求項16】
前記複数の開口が前記回転モジュールの周囲に配置される、請求項15に記載の装置。
【請求項17】
前記第1の払出し部材及び前記第2の払出し部材が略円筒形であり、前記第1の払出し部材の直径が前記第2の払出し部材の直径と同じである、請求項1に記載の装置。
【請求項18】
前記第1の払出し部材及び前記第2の払出し部材が略円筒形であり、前記第1の払出し部材の直径が前記第2の払出し部材の直径と異なる、請求項1に記載の装置。
【請求項19】
試料保持容器の積層列から試料保持容器を分離するための方法であって、
少なくとも第1の試料保持容器及び第2の試料保持容器の積層列を、ヘリカルねじ切り部を備える第1の払出し部材に隣接して配置するステップと、
前記第1の払出し部材を第1の方向に回転させるステップと、
前記試料保持容器を前記ヘリカルねじ切り部によって係合するステップと、
前記試料保持容器の積層列から前記第1の試料保持容器を切り離すステップと、
前記第1の払出し部材を第2の方向に回転させるステップと、
前記試料保持容器を前記第1の払出し部材から払い出すステップと、
を含む、方法。
【請求項20】
前記試料保持容器の積層列を第1の払出し部材に隣接して配置する前記ステップが、前記積層列を、ヘリカルねじ切り部を備える第2の払出し部材にも隣接するように配置しながら行われる、請求項19に記載の方法。
【請求項21】
前記第1の払出し部材を第1の方向に回転させる前記ステップが、前記第2の払出し部材を第2の方向に回転させながら行われる、請求項20に記載の方法。
【請求項22】
前記第1の払出し部材を第2の方向に回転させる前記ステップが、前記第2の払出し部材を第1の方向に回転させながら行われる、請求項20に記載の方法。
【請求項23】
前記試料保持容器を前記第1の払出し部材から払い出す前記ステップが、前記試料保持容器を前記第2の払出し部材から払い出すのと実質的に同時に行われる、請求項20に記載の方法。
【請求項24】
前記第1の払出し部材が右巻き方向のヘリカルねじ切り部を備え、前記第2の払出し部材が左巻き方向のヘリカルねじ切り部を備える、請求項20に記載の方法。
【請求項25】
前記第1の払出し部材が左巻き方向のヘリカルねじ切り部をさらに備え、前記第2の払出し部材が右巻き方向のヘリカルねじ切り部をさらに備える、請求項24に記載の方法。
【請求項26】
前記第1の方向が時計回りの方向であり、前記第2の方向が反時計回りの方向である、請求項21に記載の方法。
【請求項27】
前記第1の方向が時計回りの方向であり、前記第2の方向が反時計回りの方向である、請求項22に記載の方法。
【請求項1】
試料保持容器の積層列から試料保持容器を分離するための装置であって、
少なくとも2つの試料保持容器の積層列を受け支えるための支持部材と、
第1の払出し部材及び第2の払出し部材であって、各々がヘリカルねじ切り部を備える第1の払出し部材及び第2の払出し部材と、
を備え、
前記支持部材が、前記少なくとも2つの試料保持容器の積層列を前記第1の払出し部材と前記第2の払出し部材との間に案内するように配置され、
前記第1の払出し部材が、時計回りの方向に回転可能な第1の回転体と動作可能に接続され、前記第2の払出し部材が、反時計回りの方向に回転可能な第2の回転体と動作可能に接続され、前記第1の回転体及び前記第2の回転体が前記第1の払出し部材及び前記第2の払出し部材を回転させ、それによって前記少なくとも2つの試料保持容器のうちの1つが前記試料保持容器の積層列から払い出される、装置。
【請求項2】
前記第1の回転体がさらに反時計回りの方向に回転可能であり、前記第2の回転体がさらに時計回りの方向に回転可能である、請求項1に記載の装置。
【請求項3】
前記第1の払出し部材の前記ヘリカルねじ切り部が右巻き方向であり、前記第2の払出し部材の前記ヘリカルねじ切り部が左巻き方向である、請求項1に記載の装置。
【請求項4】
前記右巻き方向の前記ヘリカルねじ切り部が、前記左巻き方向の前記ヘリカルねじ切り部のピッチと等しいピッチを備える、請求項3に記載の装置。
【請求項5】
前記ピッチが約6.9°〜7.3°の範囲、又は約9.2°〜9.6°の範囲である、請求項4に記載の装置。
【請求項6】
前記ピッチが7.1°又は9.4°である、請求項4に記載の装置。
【請求項7】
前記第1の払出し部材が左巻き方向のヘリカルねじ切り部をさらに備え、前記第2の払出し部材が右巻き方向のヘリカルねじ切り部をさらに備える、請求項3に記載の装置。
【請求項8】
前記第1の払出し部材の前記右巻きヘリカルねじ切り部のピッチが、前記第1の払出し部材の前記左巻きヘリカルねじ切り部のピッチと異なる、請求項7に記載の装置。
【請求項9】
前記右巻きヘリカルねじ切り部の前記ピッチが約6.9°〜7.3°の範囲であり、前記左巻きヘリカルねじ切り部の前記ピッチが約9.2°〜9.6°の範囲である、請求項8に記載の装置。
【請求項10】
前記右巻きヘリカルねじ切り部の前記ピッチが約9.4°であり、前記左巻きヘリカルねじ切り部の前記ピッチが約7.1°である、請求項8に記載の装置。
【請求項11】
前記第1の回転体又は前記第2の回転体が振動モータを備える、請求項1に記載の装置。
【請求項12】
前記第1の試料保持容器を前記第2の試料保持容器と分離した後に前記試料保持容器を受け支えるための試料保持容器受けをさらに備える、請求項1に記載の装置。
【請求項13】
前記支持部材が筒体を備える、請求項1に記載の装置。
【請求項14】
前記支持部材の上方に配置される回転モジュールであって、試料保持容器の積層列を支持するための複数の開口を備える回転モジュールをさらに備える、請求項1に記載の装置。
【請求項15】
前記複数の開口の各々が、前記回転モジュールの中心から等距離に、且つ互いに等距離に配置される、請求項14に記載の装置。
【請求項16】
前記複数の開口が前記回転モジュールの周囲に配置される、請求項15に記載の装置。
【請求項17】
前記第1の払出し部材及び前記第2の払出し部材が略円筒形であり、前記第1の払出し部材の直径が前記第2の払出し部材の直径と同じである、請求項1に記載の装置。
【請求項18】
前記第1の払出し部材及び前記第2の払出し部材が略円筒形であり、前記第1の払出し部材の直径が前記第2の払出し部材の直径と異なる、請求項1に記載の装置。
【請求項19】
試料保持容器の積層列から試料保持容器を分離するための方法であって、
少なくとも第1の試料保持容器及び第2の試料保持容器の積層列を、ヘリカルねじ切り部を備える第1の払出し部材に隣接して配置するステップと、
前記第1の払出し部材を第1の方向に回転させるステップと、
前記試料保持容器を前記ヘリカルねじ切り部によって係合するステップと、
前記試料保持容器の積層列から前記第1の試料保持容器を切り離すステップと、
前記第1の払出し部材を第2の方向に回転させるステップと、
前記試料保持容器を前記第1の払出し部材から払い出すステップと、
を含む、方法。
【請求項20】
前記試料保持容器の積層列を第1の払出し部材に隣接して配置する前記ステップが、前記積層列を、ヘリカルねじ切り部を備える第2の払出し部材にも隣接するように配置しながら行われる、請求項19に記載の方法。
【請求項21】
前記第1の払出し部材を第1の方向に回転させる前記ステップが、前記第2の払出し部材を第2の方向に回転させながら行われる、請求項20に記載の方法。
【請求項22】
前記第1の払出し部材を第2の方向に回転させる前記ステップが、前記第2の払出し部材を第1の方向に回転させながら行われる、請求項20に記載の方法。
【請求項23】
前記試料保持容器を前記第1の払出し部材から払い出す前記ステップが、前記試料保持容器を前記第2の払出し部材から払い出すのと実質的に同時に行われる、請求項20に記載の方法。
【請求項24】
前記第1の払出し部材が右巻き方向のヘリカルねじ切り部を備え、前記第2の払出し部材が左巻き方向のヘリカルねじ切り部を備える、請求項20に記載の方法。
【請求項25】
前記第1の払出し部材が左巻き方向のヘリカルねじ切り部をさらに備え、前記第2の払出し部材が右巻き方向のヘリカルねじ切り部をさらに備える、請求項24に記載の方法。
【請求項26】
前記第1の方向が時計回りの方向であり、前記第2の方向が反時計回りの方向である、請求項21に記載の方法。
【請求項27】
前記第1の方向が時計回りの方向であり、前記第2の方向が反時計回りの方向である、請求項22に記載の方法。
【図1】


【図2】
【図3A】
【図3B】
【図4】
【図5A】
【図5B】
【図5C】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図2】
【図3A】
【図3B】
【図4】
【図5A】
【図5B】
【図5C】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【公開番号】特開2012−189606(P2012−189606A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−118978(P2012−118978)
【出願日】平成24年5月24日(2012.5.24)
【分割の表示】特願2009−549187(P2009−549187)の分割
【原出願日】平成20年2月4日(2008.2.4)
【出願人】(509214056)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2012−118978(P2012−118978)
【出願日】平成24年5月24日(2012.5.24)
【分割の表示】特願2009−549187(P2009−549187)の分割
【原出願日】平成20年2月4日(2008.2.4)
【出願人】(509214056)
【Fターム(参考)】
[ Back to top ]