
試料寸法測定方法、及び試料寸法測定装置

【課題】本発明の主たる目的の1つは、複雑化・多層化された素子を測長するのに好適な試料寸法測定方法、及び試料寸法測定装置を提供することにある。
【解決手段】本発明によれば、上記目的を達成するために、半導体素子のデザインデータを用いて、試料像上のパターンの寸法を測定するに当たり、試料像、或いは測定対象の半導体素子の状況に応じて、測定条件を変化させる方法、及び装置を提案する。このような構成によれば、試料像の状態や試料上に形成されている素子の状態に応じて、適切な測定条件を選択することができるため、測定効率の向上が可能となる。
【解決手段】本発明によれば、上記目的を達成するために、半導体素子のデザインデータを用いて、試料像上のパターンの寸法を測定するに当たり、試料像、或いは測定対象の半導体素子の状況に応じて、測定条件を変化させる方法、及び装置を提案する。このような構成によれば、試料像の状態や試料上に形成されている素子の状態に応じて、適切な測定条件を選択することができるため、測定効率の向上が可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パターンの測長方法,パターンの検査装置、及びパターンの測長を行うためのコンピュータープログラムに関し、特にパターンの設計データと実画像を比較することにより、パターンに関する寸法を測長する方法,装置に関する。
【背景技術】
【0002】
CAD(Computer Aided Design) データを用いて、半導体集積回路上のパターンを測定することが知られている。CADデータのような設計データは、半導体素子が本来あるべき理想的な形状を示すものであるため、CADデータと実際に形成されたパターンを比較することによって、半導体製造プロセスの評価が可能となる。特許文献1には、検査対象パターンと基準パターンのエッジ検出を行い、検出されたエッジを比較することによって、設計データに対するパターンの変形量を検出することが開示されている。
【0003】
【特許文献1】特開2001−338304号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
昨今、半導体集積回路は、ますます微細化,多層化が進み、それに伴って、半導体検査装置の性能も向上してきた。そのような半導体検査装置の1つにCD−SEM(CriticalDimension Scanning Electron Microscope)がある。CD−SEMは、電子ビームを試料上に走査することによって得られる二次電子に基づいて、試料上に形成されたパターンの寸法を測定する装置である。特許文献1には、CD−SEM等で形成されたパターン画像とCADデータを比較することによって、パターンの変形量を検出することが開示されているが、以下のような問題がある。
【0005】
半導体ウェハ上には、多数のパターンが形成され、そのパターンが例えばトランジスタ等の半導体素子を構成している。このような半導体素子は、半導体素子の設計段階において、所定の性能を実現するようにその大きさやパターン間の接合領域の大きさ等が決定される。
【0006】
しかしながら、特許文献1に開示の技術は、昨今の複雑化,多層化された素子の測定を行うのに十分なものではなかった。第1に、特許文献1に開示の技術は、複雑ゆえ、非常に多くの測長点が想定される半導体素子の測定について、測定効率を考慮した測定について何も考慮されていなかった。第2に、特許文献2に開示の技術は、半導体素子が複数の層に亘って形成されることについて何も考慮されていなかった。
【0007】
本発明の主たる目的の1つは、複雑化・多層化された素子を測長するのに好適な試料寸法測定方法、及び試料寸法測定装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明によれば、上記目的を達成するために、半導体素子のデザインデータを用いて、試料像上のパターンの寸法を測定するに当たり、試料像、或いは測定対象の半導体素子の状況に応じて、測定条件を変化させる方法、及び装置を提案する。このような構成によれば、試料像の状態や試料上に形成されている素子の状態に応じて、適切な測定条件を選択することができるため、測定効率の向上が可能となる。
【0009】
更に、本発明によれば、複数層に形成される複数のパターン間の測長を、デザインデータを用いて行うことを提案する。このような構成によれば、半導体素子の性能や、下層に対する上層の形成状態を客観的に評価するための測定方法、及び測定装置の提供が可能となる。
【0010】
本発明の他の構成、及び更なる具体例は、発明を実施するための最良の形態の欄にて、明らかにする。
【発明の効果】
【0011】
本発明における主たる効果の1つは、複雑化・多層化した半導体素子を測長するのに好適な試料寸法測定方法、及び装置を提供することが可能となる。
【発明を実施するための最良の形態】
【0012】
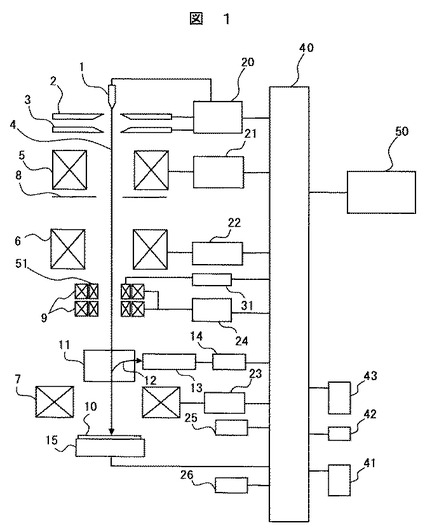
以下に、図1を用いて走査形電子顕微鏡(以下、Scanning Electron Microscope:SEMと呼ぶ)の概略を説明する。陰極1と第一陽極2の間には、制御プロセッサ40で制御される高圧制御電源20により電圧が印加され、所定のエミッション電流で一次電子線4が陰極1から引き出される。陰極1と第二陽極3の間には、制御プロセッサ40で制御される高圧制御電源20により加速電圧が印加され、陰極1から放出された一次電子線4が加速されて後段のレンズ系に進行する。
【0013】
一次電子線4は、レンズ制御電源21で制御された収束レンズ5で収束され、絞り板8で一次電子線の不要な領域が除去された後に、レンズ制御電源22で制御された収束レンズ6、および対物レンズ制御電源23で制御された対物レンズ7により試料10に微小スポットとして収束される。対物レンズ7は、インレンズ方式,アウトレンズ方式、およびシュノーケル方式(セミインレンズ方式)など、種々の形態をとることができる。また、試料に負の電圧を印加して一次電子線を減速させるリターディング方式も可能である。さらに、各々のレンズは、複数の電極で構成される静電型レンズで構成してもよい。
【0014】
一次電子線4は、走査コイル制御電源24によって制御される走査コイル9で試料10上を二次元的に走査される。一次電子線の照射で試料10から発生した二次電子等の二次信号12は、対物レンズ7の上部に進行した後、二次信号分離用の直交電磁界発生装置
11により、一次電子と分離されて二次信号検出器13に検出される。二次信号検出器
13で検出された信号は、信号増幅器14で増幅された後、画像メモリ25に転送されて画像表示装置26に試料像として表示される。走査コイル9と同じ位置に対物レンズ用アライナー制御電源31によって制御される2段の偏向コイル(対物レンズ用アライナー)
51が配置されており、試料10上における一次電子線4の位置(観察視野)を二次元的に制御できる。ステージ15は、少なくとも一次電子線と垂直な面内の2方向(X方向,Y方向)に試料10を移動することができる。
【0015】
ポインティング装置41は、試料像の位置を指定してその情報を得ることができる。入力装置42からは、画像の取り込み条件(走査速度,画像積算枚数)や視野補正方式などの指定、および画像の出力や保存などを指定することができる。
【0016】
なお、画像メモリのメモリ位置に対応したアドレス信号が、制御プロセッサ40内、或いは別に設置されたコンピュータ内で生成され、アナログ変換された後に、走査コイルに供給される。X方向のアドレス信号は、例えば画像メモリが512×512画素(pixel) の場合、0から512を繰り返すデジタル信号であり、Y方向のアドレス信号は、X方向のアドレス信号が0から512に到達したときにプラス1される0から512の繰り返しのデジタル信号である。これがアナログ信号に変換される。
【0017】
画像メモリのアドレスと電子線を走査するための偏向信号のアドレスが対応しているので、画像メモリには走査コイルによる電子線の偏向領域の二次元像が記録される。なお、画像メモリ内の信号は、読み出しクロックで同期された読み出しアドレス生成回路で時系列に順次読み出すことができる。アドレスに対応して読み出された信号はアナログ変換され、画像表示装置26の輝度変調信号となる。
【0018】
また本例で説明する装置は、検出された二次電子或いは反射電子等に基づいて、ラインプロファイルを形成する機能を備えている。ラインプロファイルは一次電子線を一次元、或いは二次元走査したときの電子検出量、或いは試料像の輝度情報等に基づいて形成されるものであり、得られたラインプロファイルは、例えば半導体ウェハ上に形成されたパターンの寸法測定等に用いられる。
【0019】
なお、図1の説明は制御プロセッサ40が走査電子顕微鏡と一体、或いはそれに準ずるものとして説明したが、無論それに限られることはなく、走査電子顕微鏡鏡体とは別に設けられたプロセッサで以下に説明するような処理を行っても良い。その際には二次信号検出器で検出される検出信号を画像としてプロセッサに伝達したり、プロセッサから走査電子顕微鏡のレンズや偏向器等に信号を伝達する伝達媒体と、当該伝達媒体経由で伝達される信号を入出力する入出力端子が必要となる。
【0020】
更に、本例装置は、例えば半導体ウェハ上の複数点を観察する際の条件(測定個所,走査電子顕微鏡の光学条件等)を予めレシピとして記憶しておき、そのレシピの内容に従って、測定や観察を行う機能を備えている。
【0021】
また、以下に説明する処理を行うプログラムを記憶媒体に登録しておき、走査電子顕微鏡等に必要な信号を供給するプロセッサで、当該プログラムを実行するようにしても良い。即ち、以下に説明する例は画像を取得可能な走査電子顕微鏡等の荷電粒子線装置に採用可能なプログラム、或いはプログラムプロダクトとしての説明でもある。
【0022】
更に、制御プロセッサ40には、半導体ウェハ上のパターンの設計データを記憶し、
SEMの制御に必要なデータに変換するCAD(Computer Aided Design) データ管理部
50を接続しても良い。当該CADデータ管理部50は、入力されたCADデータに基づいて、上記SEMを制御するレシピを作成する機能を備えている。また、制御プロセッサ40から伝達される信号に基づいて、レシピを書き換える機能をも備えている。また、以下に説明する処理を当該CADデータ管理部50内に設けられたプロセッサで行っても良い。更に、制御プロセッサ40に代わってCADデータ管理部50内に設けられたプロセッサによって、走査電子顕微鏡を制御するようにしても良い。
【0023】
なお、本例の説明ではCADデータ管理部30が、制御プロセッサ40と別体のものとして説明するが、これに限られることはなく、CADデータ管理部50が一体であっても良い。
【0024】
本例においては試料10として、半導体製品を製造する工程の中にあるウェハとした。リソグラフィー工程によりウェハ上に形成されたレジストパターンを用いた。その比較対象として、そのパターンのもととなる半導体回路設計(デザイン)データ(CADデータ)を用いた。
【0025】
ここで用いる半導体回路設計データとは、最終的に半導体回路パターンとして所望される理想のパターン形状である。なお、以下の説明は、検査対象を半導体ウェハとしたが、設計データと評価したい対象が対をなしていればこれに限ることはない。また、回路設計データは、回路設計データを表示するソフトウェアがそのフォーマット形式を表示でき図形データとして取り扱うことができれば、その種類は問わない。
【実施例1】
【0026】
以下に図面を用いて、電子顕微鏡画像のエッジ部分(以下、SEMエッジと称することもある)とデザインデータとの距離を計測(以下EPE(Edge Placement Error)測長と称することもある)する例について説明する。
【0027】
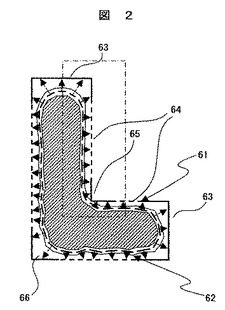
図2は、デザインデータと、電子顕微鏡画像を重ねた状態を示す図である。EPE計測は、デザインデータとSEMエッジ間の距離を計測するものであるが、図2に説明するように、実際の半導体素子は、例えばパターンの角部が潰れ、丸まって形成されることが多い。このように形成されるパターンについてEPE計測を行う場合、如何なる方向に測長を行うかの判断が困難であることがある。
【0028】
本例では、このような問題に鑑み、SEMエッジの形成方向に応じて、EPE計測を行うときの測長方向を決定することを提案する。以下に図2を用いて、デザインデータ61とSEMエッジ62間のEPE測長を行う例を用いて、本実施例を詳細に説明する。図2は、SEMエッジ62の全方向の測定を行う例を説明する図である。図2に示す例では測長部位を、(1)ラインパターンの先端(以下、ラインエンド63と称する),(2)ライン側部(以下、ラインエッジ64と称する),(3)パターンの屈折部の内側(以下、インナーコーナー65と称する)、及び(4)パターン屈曲部の外側(以下、アウターコーナー66と称する)に分類している。
【0029】
このように分類する理由として、パターンの部位ごとにその重要度や、パターンの変形要因が異なるからであり、その重要度や変形要因に応じた評価が必要になるからである。例えば、ラインエンド63とラインエッジ64では、ラインエンド63が図示しない他のパターンと接合する場合、ラインエンド63をより厳しく(許容誤差を小さく)評価する必要がある。また、パターンの角部等にはパターンの変形を抑制すべく光近接効果補正
(Optical Proximity Correction:OPC)パターンを付加することがあり、当該部分とラインエッジ間では違った評価が必要になることがある。
【0030】
以上のように、パターンの部位ごとの分類は、EPE測長値の評価を行う上で非常に重要である。本例では、パターンの部位ごとに、正確にパターンの測定方向を決定するべく、SEMエッジに対して、垂直な方向に測長方向を設定することを提案する。
【0031】
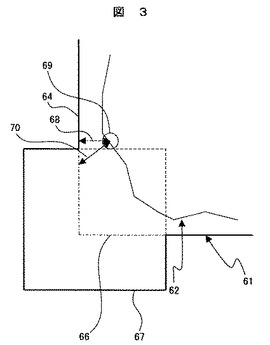
図3は、図2のアウターコーナー66周辺の拡大図であるが、仮にデザインデータを基準にその垂直方向を測長方向として決定した場合、例えば測長方向68のような方向に測長方向が決定されることになる。よって、測長基準点69は、ラインエッジ64に属する測長点と分類されてしまうことになる。
【0032】
しかしながら、測長基準点69は本来アウターコーナー66に属するものとして分類されるべきである。測長基準点69は明らかに何等かの原因でパターンの角部が丸まって形成されたが故に、形成された部分であり、ラインエッジ64とは測長寸法の変動要因が大きく異なるためである。
【0033】
以上のように、パターンの各部は、個々にその変動要因やその重要度が異なり、測長結果を分類して管理することが、寸法評価の観点から望ましい。
【0034】
そのため、本例によればSEMエッジ62に対し、垂直な方向に測長方向70を設定するようにした。このような手法により、パターンの変形要因に由来する適正な方向に、測長方向を設定することが可能となると共に、適正なEPE測長結果の分類を行うことが可能となる。
【0035】
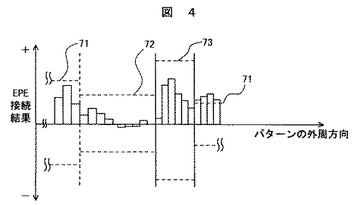
以下に、パターンの全方位にEPE測長を行う場合の更なる具体例について説明する。図4は、図2のパターンについて全方位測長を行った結果をグラフとして表した図である。図4のグラフは図2の一点鎖線部の測長結果を抽出したものである(但し、図4の測長結果そのものは図2の測長結果に必ずしも一致するものではない)。
【0036】
図4に示す例では、パターンの部位の分類ごとに、許容誤差の閾値を変化させている。このようにパターンの部位の分類ごとにEPE測長の誤差許容値を設定することによって、EPE測長結果を画一的に評価してしまうことによる測定点数の増大、或いは本来評価すべき測定点の見落としを防止することができる。閾値71,72,73,74は、それぞれラインエンド63,ラインエッジ64,インナーコーナー65,ラインエッジ64に与えられたものである。
【0037】
本例の場合、インナーコーナー65に比較して、ラインエッジ64の誤差許容値を小さく設定している。コーナー部はエッジ部に対して、エッジ垂直方向に奥行きがあるため、多少の寸法変動では、断線等のリスクが少ないからである。
【0038】
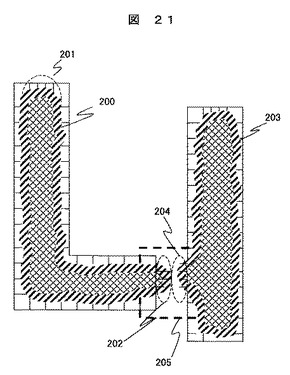
また、図21に図示するように、2つのパターン200,203が隣接する場合、ラインエンド201とラインエンド202では、寸法精度の重要度が異なる。ラインエンド
202は隣接するラインパターン203の近くに位置しているため、パターンの形成誤差によっては接触の可能性がある。一方、ラインパターン203の部分204も同様であり、他のラインエッジ部とは、寸法精度の重要性が異なる。パターンの中でも特に接触のリスクがある部分については、他の部分に対して厳密(例えば誤差許容量を小さく設定する)に管理することによって、半導体製造プロセスにおいて、歩留まり向上のための施策を早期に講ずることができる。
【0039】
また、2つのパターンが近接する部分205をホットスポットとして登録し、EPE測長個所が当該ホットスポットと重畳したときに、より厳しい寸法管理を行うようにしたり、測定点を増加する等の測定項目の調整を自動で行えるようにプログラムしておけば、操作者はより簡便に測長項目の設定(レシピの作成)を行うことが可能になる。図21では、部分205内に設定された測長点が識別可能なように、点線で表示されている。このように測長個所の重要度に応じて、表示装置上で測長個所を識別表示するようにすれば、操作者は、測長点位置や測長点数の適否を表示装置上で確認することが可能となる。
【0040】
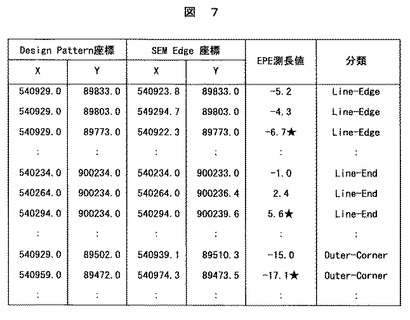
以上のように、パターンの異なる領域ごとに、異なる誤差許容値を設定することで、部位ごとの重要度に沿った適正な寸法管理を行うことが可能となる。なお、本例の場合、全方位のEPE測長結果を、図7に示すように、表形式で記憶させ、設定された誤差許容値を越えたEPE測長結果を、他の測長結果と識別できるように、識別表示することで、再評価すべきパターンが明確するようにすると良い。図7の例の場合、EPE測長結果に
“★”印を表示させることによって、他の測長結果を識別表示するようにした。このように構成すれば、管理者は許容誤差を越えた部位のみを選択的に評価することができ、評価効率の向上に効果がある。
【0041】
更に、図2にて説明したように、全方位のEPE測長を行うことによって、デザインデータに対して、パターン自体がずれているのか、パターンの一部が変形しているのかの判断を行うことが可能となる。全方位へのEPE測長を行った結果、一部のみ大きな誤差が出るようであれば、それはその領域のみが何等かの理由で、変形していることが考えられる。しかしながら、例えば或る方向のEPE測長値が大きなマイナスを示し、その反対側のEPE測長値が大きなプラスを示すような場合、パターンはそのプラス方向に大きくずれて形成されている可能性がある。
【0042】
図2に示すような全方位へのEPE測長を行うことによって、パターンの一部が変形しているのか、パターン自体がずれて形成しているのかを判断することが可能となる。この場合、図4に示す閾値71,72,73,74とは異なる閾値を設けておくことが考えられる。例えば、パターンの第1の方向に当たるパターンの部位に、第1の閾値を設けておき、当該部位の反対側に当たる第2の部位に、第2の閾値を設けておく。この場合、第1と第2の閾値は正負が逆になるようにする。このような条件下で、EPE測長結果が、第1,第2の閾値を何れも超えるような場合、上記第1の方向か、第2の方向にパターンがずれて形成されていることが推定できる。
【0043】
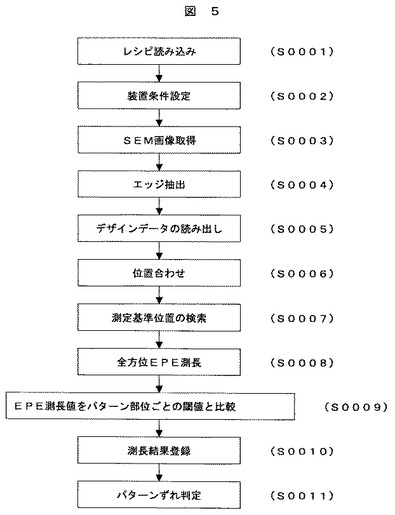
図5を用いて、本例の測長プロセスを説明する。先ず、制御プロセッサ40に対し、入力装置からの指定によって、予め記憶された測定個所,走査電子顕微鏡の光学条件等を記録したレシピを読み込む(S0001)。そして、制御プロセッサ40は、S0001にて読み込まれたレシピを元に、画像取得パラメータ、及びSEMの光学条件を設定する
(S0002)。この設定された画像取得パラメータ、及びSEMの光学条件を元にSEM画像を取得する(S0003)。
【0044】
次に、取得されたSEM画像を元にSEM画像のエッジ抽出を行う。この部分の処理には、例えば、ソーベルフィルタ等のエッジ強調フィルタが用いられる(S0004)。次に取得されたSEM画像に相当するデザインデータを読み出す(S0005)。
【0045】
デザインデータとSEMエッジ間の測長を行うに当たり、両者の位置合わせを行うために、SEM画像とデザインデータの双方が有する基準パターン(例えば高倍率のSEM画像を取得するために設けられたアライメントパターン)を基準として、両者の位置合わせを実行する。測定対象パターンについて、一般的なパターンマッチングによる位置合わせを行った場合、正確なEPE計測を実行することができなくなる恐れがあるため、SEMエッジとデザインデータの双方が持つ基準パターン間のパターンマッチングを行うことで、SEMエッジとデザインデータの測長パターンの位置合わせを行う(S0006)。
【0046】
次にレシピに記録されているデザインデータ上の測長基準位置61に対し、その垂線が測定基準位置と交差するようなSEMエッジ上の測定基準位置63を画像処理により検索する(S0007)。本例の場合、パターンの全方位について測定基準位置を検索する。そして検索されたSEMエッジ上の測定基準位置63と、デザインデータ上の測定基準位置61間の測長を行う(S0008)。
【0047】
本例の場合、レシピに設定された測長基準位置61に基づいて、SEMエッジ上の測長基準位置63を検索する例について説明したが、それに限られることはなく、例えばSEM画像を取得後、SEM画像上の任意のSEMエッジを、オペレータが入力装置等で指定し、そのSEMエッジと、当該SEMエッジの垂線上に位置するデザインデータの輪郭間の測長を行うようにしても良い。
【0048】
次に、パターンの部位の分類ごとに、割り当てられた閾値との比較を行う(S0009)。本例の場合、閾値71,72,73,74と、EPE測長結果を比較する。この結果は例えば表形式で記憶され、閾値を超えた測長結果は、他の測長値と識別して、或いは閾値を超えた測長結果のみが記憶される(S0010)。また、この測長結果を表示する場合に、他の測長結果に対して色分け,点滅等の識別表示を行うようにすれば、操作者は目視で再評価すべき測長部位を特定することができる。
【0049】
次に、パターンの一部が変形しているのか、パターン自体がずれて形成されているのかを比較するために、パターンの所定の方向と、その反対の方向のEPE測長結果が、いずれも所定の閾値を越えており、且つそのずれの方向が正負逆になっているかの判定が行われる(S0011)。この判定結果も上記表形式で記憶しても良いし、パターンがずれている旨を表示するようにしても良い。
【0050】
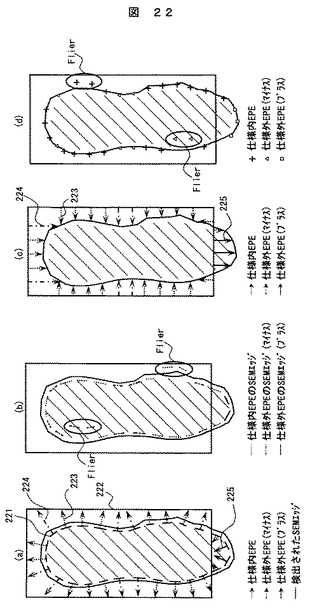
図22は、EPE測長結果の表示例を説明する図である。図22(a)は、検出されたSEMエッジ221と、デザインデータ222間のEPE測長を行った結果をSEMエッジ、及び/又はデザインデータ上に重ねて表示する例を説明する図である。
【0051】
点線223は、EPE測長結果が仕様内(理想値に比べて所定の誤差範囲(閾値)内に収まった測長個所)に収まった測長個所を示している。一点鎖線224は、EPE測長結果が仕様外となった測長個所であり、理想値と比較して負の測長結果となった測長個所を示している。実線225は、EPE測長結果が仕様外となった測長個所であり、理想値と比較して正の測長結果となった測長個所を示している。
【0052】
このように測長結果を、仕様内外で識別して表示することによって、操作者は仕様外となった測長個所を選択的に確認することができるため、半導体プロセスの条件判断を容易に実現できるようになる。
【0053】
特に、本例のようにパターンに対して全方位での測長を行った場合、パターンの形成位置自体がずれているのか、パターンの変形によって、EPE測長結果が仕様外となっているのか、目視で容易に判断可能となる。
【0054】
また、全方位測長結果を、チップ単位、或いは光学式露光装置のショット単位で、且つ所定の方向ごとに平均値等を算出し、その算出結果を、チップ単位、或いはショット単位でウェハマップ状に表示する。これによって、チップ或いはショット単位での全方位測長結果を、他のチップ、或いはショットと対比しつつ、目視で確認することが可能となる。
【0055】
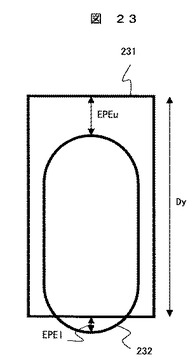
更に、例えば図23に説明するように、デザインデータ231に対し、SEMエッジ
232が図面下側にずれているような場合、SEMエッジ232がデザインデータ232に対しずれてしまった要因を特定する必要があるが、デザインデータの大きさに対しSEMエッジの大きさがどの程度変化しているかによって、その重要度が異なる場合がある。例えばSEMエッジの寸法がデザインデータと比較して極めて小さくなっている場合(例えば、Th1<│Dy−(EPEu+EPEl)│)、SEMエッジ寸法とデザインデータの寸法差があまりない状態と比較すると、EPElが仮に同じであったとしても、図23の下側方向へのパターンのシフト量が非常に大きなものとなる。よって、Th1<│Dy−(EPEu+EPEl)│の場合と、Th1≧│Dy−(EPEu+EPEl)│とで識別して、測長個所を表示するようにすると良い。
【0056】
ウェハマップ状に表示するときも同様であり、デザインデータに対するパターンの大きさの情報と、SEMエッジのシフト量に関する情報を重畳して表示しておけば、操作者は、同じEPE測長結果が得られたとしても、その深刻さを目視にて判断することが可能となる。
【0057】
図22(b)は、図22(a)の矢印表示に換えて、SEMエッジを、仕様内,仕様外(プラス,マイナス)とで識別して表示する例を示す図である。本例では仕様内のEPE測長結果が得られた場合、点線でSEMエッジを表示し、仕様外(マイナス)のEPE測長結果が得られた場合、SEMエッジを一点鎖線で表示している。そして、仕様外(プラス)のEPE測長結果が得られた場合は、実線でSEMエッジを表示するようにした。このように、SEMエッジを示す線を、EPE測長結果に基づいて、識別して表示することによって、測長結果の傾向を目視で判断することが可能になる。
【0058】
図22(c)はデザインデータを基準としてEPE測長の方向を定めた例を説明する図である。図22(a)では、SEMエッジを基準として、SEMエッジに対し垂直な方向に向かって、測長方向を設定し、SEMエッジ−デザインデータ間の測長を行っているが、図22(c)では、デザインデータに対し垂直な方向に測長方向を設定している。このような測長方向の切り替えと共に、EPE測長結果に基づく仕様内,仕様外の表示も切り換えて行うことによって、オペレータはそのパターンの測長を行うに当たって、どのような方向に測長方向を設定すれば良いか、実際のSEMエッジを確認しながら判断することができる。
【0059】
図22(d)は、図22(b)の線表示に換えて、十字,三角、及び四角マークで、それぞれ、仕様内EPE測長結果,仕様外(マイナス)測長結果、及び仕様外(プラス)測長結果を表示するようにしたものである。本例に限らず、マーク自体が測長結果を反映する形状であれば、種々の形状のものが適用可能である。
【実施例2】
【0060】
以下に、図面を用いて、デザインデータとSEMエッジ間の測長結果に基づき、サンプリング点を決定する例について説明する。図2に示すように、1つのパターンのEPE計測を行う場合、非常に多くの測長基準位置候補が考えられる。しかしながら、全ての測長基準位置候補の測長結果から、パターンを評価することは、非常に時間と手間を要し、測定効率上好ましくない。一方でパターンが理想形状(デザインデータ)からどのように変形するかを予め判断するのは非常に困難であり、レシピによって設定した測定基準位置が必ずしも適正な測長個所であるという保障はない。
【0061】
本例では、上記問題に鑑み、複数部分のデザインデータとSEMエッジ間の測長を行い、測長値が所定の閾値を超えた部位をサンプリング点とすることを提案する。即ち、デザインデータから大きく寸法が変化する部分は、評価対象として重要である点に鑑み、その部分を選択的にサンプリングすることによって、測定効率の向上を実現することを提案する。
【0062】
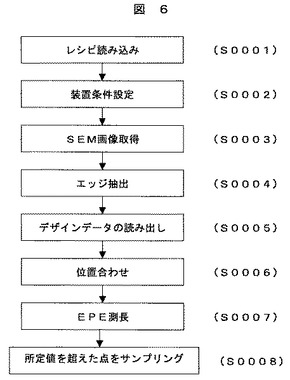
図6を用いて、本例の測長プロセスを説明する。なお、図5と同様のステップは説明を省略する。先ず、図5の例と同様に、制御プロセッサ40はレシピに記憶された光学条件等に基づいて、SEM画像を取得する(S0001〜S003)。
【0063】
以上のように取得されたSEM画像とデザインデータとの間でEPE測長を行う
(S0007)。デザインデータ上には複数の測長基準位置(図2の例の場合、35点)が設定されており、複数の測長基準位置ごとに、SEMエッジとの間で測長を行う。このようにして得られた複数の測長結果を、予め定められた所定値(閾値)と比較する
(S0007)。この比較の結果、所定値を超えた部位をサンプリング点とし、その測長結果を測長部位の位置情報と共に記憶媒体に記憶する(S0008)。
【0064】
このように所定値を超えた部分を選択的にサンプリングすることによって、後のパターン評価を効率良く実行することができる。なお、本例では所定値を超えた測長部位に関する情報のみを選択的に記憶する例について説明したが、これに限られることはなく、例えば図2の場合、35点全ての測長値を記憶し、所定値を越えた点がどの点か判るように、測長位置情報にフラグを立てて、後の評価において、それらの測長点を容易に判断できるようにしても良い。測長位置,測長結果、及び所定値を超えたか否かのフラグは表形式にして記憶しても良いし、例えば図2に図示するように、SEM画像とデザインデータの重畳画像上に、所定値を超えた測長位置を他の測長位置と比較して識別して表示するようにしても良い(図2の場合、点線表示によって、所定値を超えた測長点を識別表示するようにした)。
【実施例3】
【0065】
以下に、図面を用いて、測長結果を、その測長位置に関連するデザインデータの状態に基づいて、分類する例について説明する。図8は、複数のパターンが積層形成された例を示すものであり、アクティブエリア(アンダーレイヤー)80上に、ポリゲート(ターゲットレイヤー)81が積層されたパターンのSEM画像に、アンダーレイヤーとターゲットレイヤーのデザインデータ82,83を重ねた表示例を示す図である。
【0066】
半導体素子を構成する複合パターンについて、EPE測長を行う場合、非常に多くの測長位置候補が存在する。しかしながら、全ての測長基準位置候補の測長結果に基づいて、パターンを評価することは、非常に時間と手間を要し、測定効率上好ましくない。
【0067】
以下に、半導体素子の性能を決定する部分は、測定対象として重要であるのに対し、半導体素子の性能を大きく左右しない部分は、測定対象としての重要度が低いという知見から、半導体素子を構成するパターンの測長を行う場合、測長位置におけるデザインデータの状態に応じて測長結果を分類することで、評価対象として重要な測長結果と、そうでない測長結果を選別し、SEM画像を用いた半導体素子評価を高効率に実現する例について説明する。
【0068】
即ち、本例ではデザインデータの部位ごとに、測長結果の分類を行うことを説明する。
【0069】
図8の場合、測長部位Aはアクティブエリアとポリゲートが重なる部分であり、測長対象として非常に重要である。一方、測長部位Bは、多少細くなったとしても、トランジスタの性能に大きく影響しない部分である。このように、1つのポリゲートであってもそのデザインデータの状態(特に接続される他のパターンとの関係)に応じて、その重要度が変化する。
【0070】
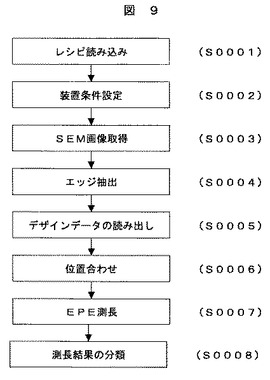
本例は半導体素子の性能を評価するツールとして、デザインデータの特徴位置毎に、測長結果を選別して登録することを提案する。図9を用いて、本例の測長結果の選別プロセスを説明する。
【0071】
先ず、図5等と同様に、制御プロセッサ40はレシピに記憶された光学条件等に基づいて、SEM画像を取得する(S0001〜S003)。以上のように取得されたSEM画像とデザインデータとの間でEPE測長を行う(S0007)。デザインデータ上には多数の測長基準位置が設定されており、多数長基準位置ごとに、SEMエッジとの間で測長を行う。なお、本例の場合、測長位置はレシピに登録されているものとして説明しているが、これに限られることはなく、SEM画像とデザインデータの重畳画面上で、入力装置によって、任意に設定しても良い。
【0072】
上記S0007にて得られた複数の測長結果を、予め定められた分類、或いはデザインデータから得られる素子の情報に基づいて分類する(S0008)。例えば図8のゲートパターン81の場合、大別して3つの分類に分けられる。先ず第1に、アクティブエリアと重なる部分に関する測長部位A,アクティブエリアとは重ならない部分に関する測長部位B、及び第3にターゲットレイヤーの上層に形成されるコンタクトホールと重なる部分に関する測長部位Cである。
【0073】
上述のように、測長部位Aは非常に重要な評価対象である。一方、測長部位Bは上述のように、評価対象としての優先順位は低い。更に測長部位Cは、上層に形成されるパターンの種類によって、重要度が変化する。なお、以下の説明では測長部位Cは、上層に形成されるパターンとの関係から重要な測長部部位であり、測長部位Dは、上層に形成されるパターンとの関係から、評価優先順位の低いパターンであるとして説明する。このように本例によれば、重要な評価対象とそれ以外を分類した上で評価することができるため、測定効率向上に効果がある。
【0074】
更に、上記の例では素子の状態ごとに測長部位を分類することについて説明したが、単に各測長結果がどの分類に属するのかが判るような、目印を付けておくだけでも良い。測定位置に対する測長結果を表形式に記憶し、その表に測長結果がどの分類に属するかの識別記号等を追加するようにしても良い。また、分類の類型には様々なものが考えられるが、1つとして『半導体素子の特性に大きく影響を与える部分』と『それ以外の部分』で大別することが考えられる。他にも『他のパターンとの接合部分(或いは接合予定部分)』と『それ以外の部分』で大別することが考えられる。これらの組み合わせは2つに限らず、3つ以上でも良く、更に種々の類型を組み合わせて新たな分類を作成するようにしても良い。
【0075】
図10は、図2の説明に用いたパターンのEPE測長に関し、デザインデータ61を基準として、測長方向を決定する例を説明する図である。本例の場合は、デザインデータ
61に対し、垂直な方向に測長方向を設定している。但し、アウターコーナー66とインナーコーナー65は、コーナーを形成する2本の直線の交点から、当該直線に対し45°の方向に向くように測長方向を設定した。このようにデザインデータベースで測長方向を決定することによって、形成されるSEMエッジに因らず、画一的に測長方向を決定することが可能となる。
【実施例4】
【0076】
上記実施例3にて説明したように、同じ半導体素子の中でも評価対象として重要なものとそうでないものがある。測定精度の観点からも、重要な評価対象は高精度に測定しなければならない反面、重要度の低い評価対象は、比較的低い測定精度で足りる。
【0077】
パターンの測長値が、デザインデータの寸法値から大きく変化している場合には、そこには何らかのプロセス上、或いはパターン設計上の問題があることが考えられる。この問題を究明するためにEPE測長が行われるが、測長効率の観点から、許容誤差を設定し、デザインデータの寸法値とパターンの測長値との差異が所定の許容誤差内にある場合は、そのパターンは適正に形成されているものと判断することが望ましい。
【0078】
本例では、上記許容誤差を測定対象の重要度に応じて変化させることによって、測長誤差を画一的に決定することによる評価精度の低下、或いは測長効率の低下を防止する手法を提案する。例えば実施例3にて説明した測長部位Cと測長部位Dは、ほぼ同様の測長対象であるが、上述のように測長部位Cはコンタクトホールを経由して上層に形成されるパターンとの関係から、重要な測長部部位であり、測長部位Dは、上層に形成されるパターンとの関係から、評価優先順位の低いパターンである。このような例の場合、測長部位Cにはある所定の値より小さい誤差許容値を設定し、測長部位Dには測長部位Cより大きな誤差許容値を設定すると良い。このような構成によれば、まだ形成されていないパターン(上層に形成されるパターン)との関係に基づいて、適正な誤差許容値を設定することができる。
【0079】
以上のようにデザインデータによって得られる素子の情報に基づいて、誤差許容値に変化を付けることによって、測長精度の向上と測長効率の向上の両立を実現することができる。また、実施例3にて説明したような『半導体素子の特性に大きく影響を与える部分』と『それ以外の部分』、或いは『他のパターンとの接合部分(或いは接合予定部分)』と『それ以外の部分』との間で、誤差許容値に変化をつけるようにしても良い。
【実施例5】
【0080】
次に、半導体ウェハの上層と、その下層のEPE測長結果を複合処理する例について説明する。デザインデータは、パターンにとって理想的な形状であり、半導体製造工程では、その形状を極力デザインデータに近づけるように、製造装置などのコンディションが調整される。しかしながら、実際に形成されるパターンは光学式露光装置の露光位置ずれ,露光装置のレンズヒーティング等の装置条件の変化、或いはデザインデータがその形状を再現するのに適切ではない、等の事情により、形状がデザインデータから大きく変化することがある。
【0081】
このような変化の要因をいち早く究明し、製造条件等にフィードバックすることが、半導体素子の開発時間やコストの低減に繋がる。
【0082】
そのために、本例ではまず半導体ウェハの層間の接続を行うコンタクトホールによって接続されるSEMエッジ間の距離や重なり面積を、各レイヤーのEPE測長結果から求める例について説明する。
【0083】
図11は、上層,下層、及び上層と下層を接続するためのコンタクトホールの関係を概念的に説明するための図である。
【0084】
図25のフローチャートにて説明するように、まず下層配線のデザインデータ85と、下層配線のSEMエッジ86間のEPE測長を行い、EPE1を計算する(S0001)。本例の場合、x方向とy方向について、EPE測長を行い、EPE1x,EPE1yを計算する。以下のEPE測長でも同様である。
【0085】
同様にして、コンタクトホールのデザインデータ87と、SEMエッジ88間についてEPE測長を行い、EPE2を計算し(S0002)、上層配線のデザインデータ89と、SEMエッジ90間についてEPE測長を行い、EPE3を計算する(S0003)。
【0086】
次に上層,コンタクトホール、及び下層間の重なり(オーバーレイ)精度を測定するために、下層配線のSEMエッジ86とコンタクトホールのSEMエッジ88間の測長値
(overlay 1〜2)、及びコンタクトホールのSEMエッジ90と、上層配線のSEMエッジ90間の測長値(overlay 2〜3)を求める(S0004)。
【0087】
overlay1〜2とoverlay2〜3は、上層と下層のSEMエッジの相対関係が1枚の画像から判断できる場合に、その画像を用いて測定される。しかしながら測定対象の下層のエッジが判らない場合には、近接したパターンで上層下層の相対関係が判るものを利用して、実質的にoverlayを計測するようにしても良い。
【0088】
以上のようにして測定された測長値に基づいて、(式1),(式2)の計算を行う
(S0005)。
【0089】
X:EPE1x+overlay1〜2x+EPE2x+overlay2〜3x+EPE3x
≦Thx (式1)
Y:EPE1y+overlay1〜2y+EPE2y+overlay2〜3y+EPE3y
≦Thy (式2)
以上のような評価を行うことによって、コンタクトホールによって接続される上層のパターンと下層のパターン間の重ね合わせ精度の評価が可能となる。ThxとThyはx方向とy方向のずれの許容値に基づいて決定される閾値であり、所望の半導体性能を発揮するのに必要なオーバーレイの程度によって、決定されるべきものである。
【実施例6】
【0090】
次に、EPE測長結果を用いて、光学式露光装置(ステッパ)によって形成されたパターンを評価する評価方法、及び装置について説明する。
【0091】
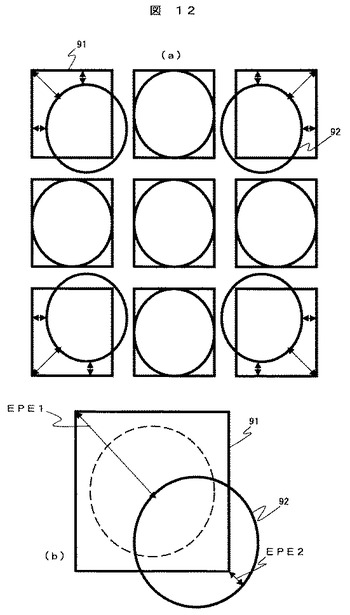
図12(a)は複数のコンタクトホールが形成される領域について、デザインデータ
91にSEMエッジ92を重ねた例を示す図である。図12(b)はその拡大図である。本例においては9個のコンタクトホールを含む視野で取得されたSEM画像(1枚)と、デザインデータとの間で、EPE測長を行う例について説明するが、これに限られることはなく、例えば、1つのコンタクトホールを含む画像を、異なるコンタクトホールごとに複数枚取得して、それぞれのデザインデータと比較するようにしても良い。
【0092】
以下に、複数のパターンのEPE測長を行うことによって、半導体ウェハにパターンを転写する光投影露光装置(ステッパ)の露光精度を評価する例について説明する。
【0093】
図12に示すように、所定の領域単位でEPE測長を行った場合、ホールパターンの
EPE測長結果に、或る傾向が現れる場合がある。図12の例の場合、周辺部のホールが全体的に中心にシフトして形成されている。例えばステッパの1ショット内でこのような傾向を示す場合、ステッパのレンズに不具合があり、投射倍率に誤差があることが考えられる。また、1ショット内の複数のパターンについて、EPE測長を行うことによって、デザインデータ自体に問題があるのか、露光条件に問題があるのかを判定することができる。
【0094】
更に、図24に示すように、EPE測長結果を所定の領域単位でマップ状に表示することによって、例えばショット単位でのSEMエッジのずれの傾向を目視で確認することが可能となる。所定領域単位で、パターンがどの方向に、どの程度ずれたかを表示している。そのために、所定領域241ごとにEPE測長を実行し、パターンのずれを測定している。より具体的にはSEMエッジと、デザインデータ間のEPE測長を全方位について行うことによって、デザインデータと、デザインデータから最も離間したSEMエッジ間の距離に基づいて、SEMエッジのずれ方向とずれ量を検出する。
【0095】
本例の場合、EPE1−{(デザインデータの対角線の距離−SEMエッジの直径)/2}を演算することによって、デザインデータに対するSEMエッジの縮小量分の寸法変化分を除外した真のずれ量を求め、当該ずれ量のうち、最も大きな値を示す方向をずれの方向と定義した。なお、ずれの方向が特定できるのであれば、他の手法を用いても構わない。
【0096】
更に、本例ではデザインデータを基準に、EPE測長の方向を設定する例について説明しているが、これに限られることはなく、SEMエッジベースで、EPE測長の方向を決定するようにしても良い。
【0097】
このずれ量に比例する長さの矢印を、各所定領域241内に表示する。所定領域241内に複数のEPE測長結果がある場合は、その平均値を矢印として表示しても良いし、或る特定のパターンのEPE測長結果に基づいて求められる値を矢印として表示するようにしても良い。
【0098】
図24の領域242は、EPE測長が行われていない領域であり、このように識別表示することによって、測長実施の有無を判断することが容易になる。
【0099】
また、所定値以上のずれを示す領域241を選択的に表示、或いはそれ以外の領域を識別して表示することによって、ずれ量が過大な部分を抽出して表示することができるため、デバイス上の所定領域(例えばウェハ全体)内の面内傾向を目視で確認することが可能となる。
【0100】
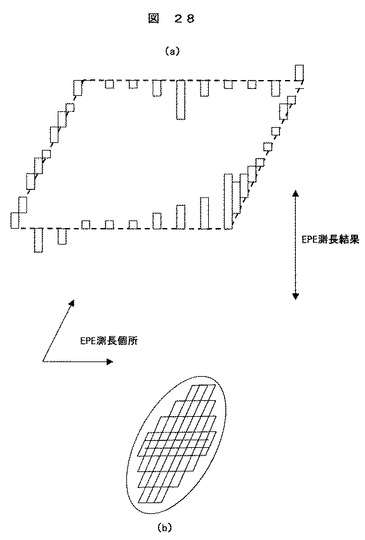
更に、SEMエッジ92について、全方向EPE測長を行い、図28(a)に示すように、三次元的に表示するようにしても良い。本例の場合、図28(a)の縦軸は、EPE測長結果を示すものであり、横軸はEPE測長個所、或いは方向を示すものである。
【0101】
また、図28(b)に示すように、全方向EPE測長結果を、三次元的にウェハマップ状に表示することによって、各チップ、或いは各ショット内の平均的なずれを視覚的に判断することが可能となる。なお各チップ,ショットのウェハ表面方向のずれを表現できるのであれば、図28に示すような形態に限られず、種々の表示形態を選択することが可能である。
【0102】
また、上述のように、単にEPE測長結果をウェハマップ状に表示するようにしても良いし、パターンの縮小分を除外したずれ成分、或いはパターンのずれ分を除外したパターンの縮小分を表示するようにしても良い。このように表示することによって、操作者は、デザインデータに対するSEMエッジの変化要因ごとにEPE測長結果を評価することが可能になる。
【実施例7】
【0103】
次にターゲットレイヤーと、その他のレイヤーの二次元方向(X,Y方向)のEPE測長結果を計算することによって、レイヤー間の重なり精度を計測する例を、図面を用いて説明する。
【0104】
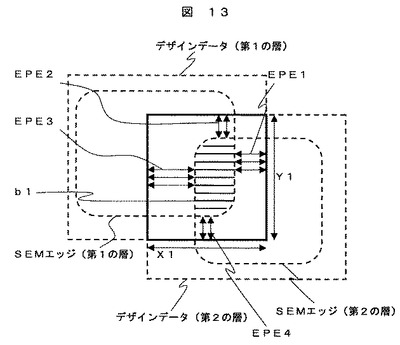
図13は、2つのパターンが積層された半導体素子のデザインデータと、SEMエッジを重ねた例を示す図である。本例の場合、デザインデータにおける2つのパターンの重ね合わせ領域の大きさと、SEMエッジにおける2つのパターンの重ね合わせ領域の大きさの比率をレイヤー間の重なり精度と定義して説明する。即ち、図13の領域a1(X1×Y1)と領域b1の比率が1対1の場合は、重ね合わせ精度が最高であるとの前提のもと、その精度を評価する。
【0105】
図14は、重ね合わせ精度を検出するステップを表すフローチャートである。先ず、第1の層のSEMエッジをSEM画像から抽出する(S0001)。次に第1の層についてEPE測長を行う(S0002)。本例の場合、X方向とY方向についてそれぞれEPE1,EPE4の測長を行う。次に第2の層のSEMエッジを抽出する(S0003)。そして、第2の層についてEPE測長を行う(S0004)。第2の層についても、第1の層と同様に、X方向とY方向のそれぞれについてEPE2,EPE3の測長を行う。
【0106】
本例の場合、SEMエッジの重ね合わせ部分が四角であるとの前提のもとに、SEMエッジ間の重ね合わせ領域b1を、b1=(X1−EPE1−EPE3)×(Y1−EPE2−EPE4)にて計算する。X1,Y1はデザインデータに基づいて導き出すことができる。そして、重ね合わせの程度を算出すべく、b1/a1を計算する(a1=X1×Y1)(S0005)。以上によって、デザインデータによって定義されている理想的なパターンの重ね合わせに対し、実パターンがどの程度の精度で重ね合わせられているか、客観的な評価を行うための値を求めることが可能となる。
【0107】
なお、第1層について、レイアウトデータとSEMエッジのマッチングを行った上で、第1層を基準とした第2層の重ね合わせ精度を求めることによって、第1層を基準とした第2層の重ね合わせの程度を求めることができる。更に、第1層と第2層を合わせた形でマッチングをすれば、第1と第2の層の相対的な重ね合わせの程度を求めることができる。また上述したb1/a1に替えて、a1/b1を演算することで、重ね合わせ誤差の程度を計算するようにしても良い。
【0108】
上述した例によれば、2つの面積の比を求めることで、重ね合わせの程度、或いは重ね合わせ誤差を求める例について説明したが、これに限られることはなく、例えばX又はY方向の一方向の重ね合わせ程度、或いはずれ(誤差)の程度を求めるようにしても良い。
【実施例8】
【0109】
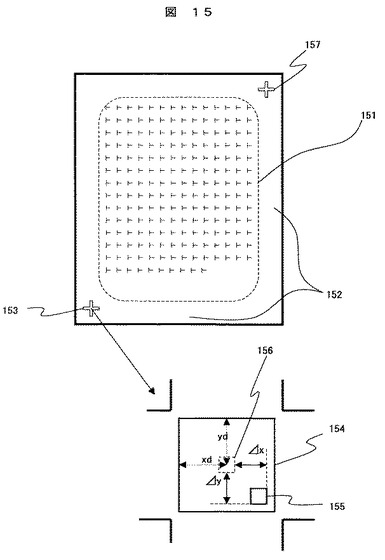
図15は、光学式半導体露光装置(ステッパー)によって露光され、パターンが形成されたチップの一例を示す図である。チップは、主として半導体パターンが形成されるコアエリア151と、チップ毎に分割する際の切りしろとなるスクライブエリア152に大別される。本例では、スクライブエリア152に、アライメントマーク153を設け、当該アライメントマーク内に設けられたオーバーレイ測定用マークの重ね合わせ精度を測定することによって、コアエリア内のEPE測長を高精度に実施する例を説明する。
【0110】
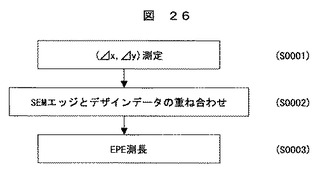
図26はオーバーレイ精度計測に基づく、EPE測長の測定工程の一例を示すフローチャートである。まず、オーバーレイ精度を測定する。本例では、図15に示すように、半導体素子の下層と上層とのオーバーレイ精度を測定するために、上層に下層まで通ずる開口154が設けられており、更に下層には、上層との相対関係が特定できるようなパターン155が設けられている。本例ではパターン155の理想的な形成位置156より、
Δx,Δy分ずれて、上層が形成された例について説明する。
【0111】
なお、パターン形状は任意のもので良く、上下層の相対距離が特定できるものであれば、その形状は問わない。ステップ0001では、走査電子顕微鏡によって、パターンの理想的な形成位置156と実際に形成されたパターン155との相対関係を測定することによって、下層に対する上層のずれを検出する。
【0112】
本説明は、理想的な形成位置156が、開口154の中心位置に存在する例を説明するものである。即ち、理想的には検出された開口154のSEMエッジから(xd,yd)分、離間してパターンが形成される例を説明する。デザインデータには開口154とパターンの理想的な形成位置156との関係が予め登録されている。
【0113】
ステップ0002では、ステップxxにて検出された上層と下層間のずれ(Δx,Δy)分、ずらした状態で、コアエリア151内のSEMエッジと、デザインデータを重ねる処理を行う。この場合、上記(Δx,Δy)分、所定の位置からデザインデータをずらした状態で、デザインデータを重ねるようにする。
【0114】
ステップ0003では、デザインデータが重ねあわされたSEM画像上のパターンエッジと、当該エッジに相当するデザインデータの線分間について、EPE測長を行う。
【0115】
このようにして得られるEPE測長結果は、露光位置が適正な位置にある場合のパターン位置と、実際のパターン位置との違いを示している。操作者は、露光位置ずれがあったとしても、そのずれがない状態における露光状態を把握することができるため、例えば、露光位置ずれを含む複数の露光精度低下要因があったとしても、その低下要因ごとの判別が可能となり、適正な露光条件を早期に見出すことが可能となる。
【0116】
より具体的には、コアエリア151内の複数のパターンについてEPE測長を行った場合、パターンによって、EPE測長結果に違いが生ずる場合がある。この場合、ショット単位での露光位置ずれと、他の要因に基づくパターン位置ずれが含まれていることも考えられ、単にEPE測長を行っても、位置ずれ要因を具体的に把握できないことがある。
【0117】
本例のように、ショット単位の露光位置ずれを補正した状態で、EPE測長を行うことで、露光位置ずれ以外の要因を具体的に把握することが容易になる。
【0118】
なお、本例では検出されたずれ量を補正して、デザインデータとSEMエッジを重ねる例を説明したが、これに限られることはなく、補正することなく重ねたデザインデータとSEMエッジとの間でEPE測長を行い、その後、(Δx,Δy)を差し引くようにしても良い。
【0119】
また、アライメントマーク153のずれ評価に加え、他のアライメントマーク157の上層と下層間のずれを評価することによって、露光領域全体の回転成分を特定することができるので、露光位置のずれをx,y、及びR方向に評価することが可能となる。
【0120】
また、スクライブエリア152に設けられたアライメントマーク153の下層に対するずれは、露光装置の1ショットの全体的な露光位置ずれを示すものである。このずれ(或いは下層と上層の一致の程度)と、コアエリア151内の平均的なEPE測長結果を比較することによって、アライメントマークの信頼性判断や、キャリブレーションを行うことができる。より具体的には、オーバーレイマークのずれ(下層に対する上層のずれ)と、コアエリア内の複数のパターンのEPE測長結果の平均値の差、或いは比率を計算し、その値を評価することによって、上記目的が達成される。
【実施例9】
【0121】
図16は、上層部に形成されたパターン(上層パターンのSEMエッジ161)と、下層部に形成されたパターン(下層パターンのSEMエッジ162)間のオーバーレイ精度を計測する例を説明する図である。本例では、デザインデータに対するSEMエッジのずれ、及びデザインデータに対するSEMエッジの縮小量に基づいて変化するオーバーレイ精度を計測するのに好適な手法について説明する。下層パターンのデザインデータ164と、上層パターンのデザインデータ163に対し、上層パターンのSEMエッジ162と、上層パターンのSEMエッジ161が図16のように形成された例を用いて説明する。デザインデータに対するSEMエッジのずれは、図示しないアライメントパターンを基準として、デザインデータとSEM画像を重ねた場合に検出されるものとして説明するが、これに限られることはない。
【0122】
重ね合わせされたデザインデータとSEMエッジに基づいて、上層パターンと下層パターンが重なった部分の測定を行う。具体的には下層配線のデザインデータ164とSEMエッジ162間のEPE測長を行い、パターンの線方向から垂直な方向へのずれEPE3とEPE4を測定する。同様にして上層配線について、EPE1とEPE2を計測する。
【0123】
以上のようにして測定されたEPE1〜EPE4に基づいて、以下(式3),(式4)の演算を実行する。
【0124】
Xm=overlay(x)−(EPE1+EPE2) (式3)
Ym=overlay(y)−{(EPE3−ΔY0)+EPE4} (式4)
overlay(x)、及びoverlay(y)は、デザインデータ上において、2つのパターンが重なった部分のx方向、及びy方向の寸法を示すものであり、ΔY0は、デザインデータ上でもともと設定されていた、デザインデータ163とデザインデータ164間のずれの寸法である。
【0125】
XmとYmを乗算することにより、SEMエッジの重なり部分の面積を求めることができ、当該演算された面積を、デザインデータ上の重なり部分の面積(overlay(x)×
overlay(y))と比較することによって、理想値に対する実際のオーバーレイ領域の評価を行うことができる。
【実施例10】
【0126】
実施例9では、上層パターンのSEMエッジ161と、下層パターンのSEMエッジ
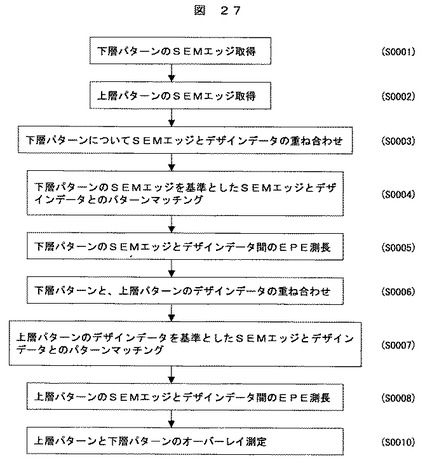
162が1枚のSEM画像上で確認できることを前提に説明したが、下層パターンと上層パターンとの間に、絶縁層などが形成され、上層パターンと下層パターンとの相対関係が、1枚のSEM画像では判断できない場合がある。本例ではこのような場合においても、上層パターンと下層パターン間のオーバーレイ精度を測定するのに好適な例について、図27のフローチャートを用いて説明する。
【0127】
まず、下層パターンのSEMエッジ162を取得し、そのデータを記憶する(S0001)。上層パターンの形成工程後に、上層パターンのSEMエッジ161を取得する(S0002)。次に、図示しないアライメントマークに基づいて、下層パターンのSEMエッジ162と、下層パターンのデザインデータ164との重ね合わせを行う。この際、下層に形成されているアライメントマークを、デザインデータとSEM画像との間で一致させるようにして、重ね合わせを行う(S0003)。このとき、SEMエッジ取得時に測定されたアライメントマークとパターンとの距離と、デザインデータに予め登録されているアライメントマークと測定対象パターンの距離に基づいて、重ね合わせを行うようにする。
【0128】
次に、下層パターンのSEMエッジ162を基準として、SEMエッジとデザインデータとのパターンマッチングを行う(S0004)。この際に得られるマッチングシフト量(ΔXl,ΔYl)を記憶する。次に、パターンマッチングが行われた下層パターンの
SEMエッジ162と、下層パターンのデザインデータ166との間でEPE測長を行い、EPEylr,EPEyllを測定する(S0005)。
【0129】
次に、図示しないオーバレイマークを用いて測定された上層パターンと下層パターンのずれ(Δxu,Δyu)分、もとのデザインデータ位置163から、ずらした位置に上層パターンのデザインデータ165を重ね合わせる(S0006)。なお、本例では(Δxu,Δyu)に、アライメントマークを基準としたデザインデータとSEMエッジ間のずれが含まれているものとして説明する。
【0130】
次に、上層パターンのデザインデータ165を基準として、上層パターンのデザインデータ165と、上層パターンのSEMエッジ161との間でパターンマッチングを行う
(S0007)。先に説明した(Δxu,Δyu)は、下層パターンと上層パターンの相対距離と、上層パターンのSEMエッジとデザインデータの相対距離が含まれているため、両者のパターンマッチングを行うことによって、実質的に下層配線と上層配線の重なりを再現した合成像を形成することが可能となる。
【0131】
次に、上層パターンのデザインデータ161と上層パターンのSEMエッジとの間で
EPE測長を行い、EPExul,EPExurを測定する(S0008)。以上の測定値に基づいて、下層配線と上層配線のオーバレイを以下のように計算する(S0009)。
【0132】
Xo=overlay(x)−{(ΔXu+EPExul)+ΔXu+EPExur} (式5)
Yo=overlay(y)−{(ΔYl+EPEyll−Yo)+(Δyl+EPEylr)} (式6)
(Xo×Yo)は実際のオーバーレイ面積を示すものであり、これをデザインデータ上のオーバーレイ面積(overlay(x)×overlay(y))と比較することにより、オーバーレイ精度を評価することが可能となる。
【0133】
以上のような演算を行うことによって、下層配線と上層配線が1枚のSEM画像に現れていない場合であっても、両者の相対関係を評価することが可能となる。
【実施例11】
【0134】
図17は、図8の中で、アクティブエリア80,絶縁体で形成されたステップ171、及びゲートパターン81が重なる部分の拡大図である。ステップ171は、半導体製造工程において、半導体素子上にアクティブエリア80を形成した後に、絶縁層を形成し、その後、CMP(Chemical Mechanical Polishing) 装置等によって、不要な部分を除去することによって形成される。
【0135】
アクティブエリア80は、周囲部と比較して低い位置に形成されているため、アクティブエリア80の縁部に形成された絶縁体は、CMP装置によって削り取られることなく、アクティブエリア80とその他の領域間の絶縁を確保するためのステップ171として形成される。
【0136】
しかしながら、CMPによる研磨条件や、絶縁体材料の種類が適性に選択されていないと、ステップを削りすぎてしまい、アクティブエリア80とゲートパターン81によって形成されるトランジスタの特性を変化させてしまうことがある。ステップ171が適正に形成されているかどうかは、例えば走査電子顕微鏡によって形成される二次元画像では、その確認が困難であるという問題がある。
【0137】
本例では、このような問題を解決するために、ステップ171とゲートパターン81が重なる部分について測長を行うことを提案する。特に、ステップが必要以上に減少していると図17に図示するように、ゲートパターン81の一部が突き出したような形状となる。このようなゲートパターンの突き出し部分を測長するということは、突き出し部分が形成される原因となったステップ81の三次元的な形状を評価することと同義となる。よって、本例によれば走査電子顕微鏡によって得られる情報に基づいて、試料の深さ方向の評価を行うことができ、さらにはCMP研磨の適正条件や、絶縁体材料の適正な種類を容易に見出すことが可能となる。
【0138】
以下に、ゲートパターンのデザインデータ172と、ゲートパターンの突出部との間の距離を、EPE測長を行う例について説明する。ボックスカーソル173は、ゲートパターンのデザインデータ172と、アクティブエリアのデザインデータ176が交差する点に位置の近傍であって、ステップ171上に位置するように配置される。次に、ボックスカーソル173内において、ゲートパターン81と、ゲートパターンのデザインデータ
172の間のEPE測長を行う。ゲートパターン81の突き出し部分177の長さが判るように、1箇所以上の測長点について、測長が行われる。
【0139】
なお、本例では、突き出し部分177先端と、ゲートパターンのデザインデータ172との間の距離を測長することで、結果として突き出し部分177の長さを評価しているが、これに限られることなく、例えば、ゲートパターン81の他の測長個所に割り当てられたボックスカーソル178内の測長個所175の測長値から、ボックスカーソル173内の測長個所179の測長値を減算して、突き出し部分177の測長値を求めるようにしても良い。
【0140】
このようにして測定された測長値は、ステップ部分の測長値として、例えば他のゲートパターンの測長個所175とは分類して記憶される。操作者はこのようにして測定された測長結果に基づいて、CMP研磨条件や、絶縁体材料の種類の評価を行うことができる。突き出し部分177が大きすぎると、半導体プロセス上、重大な問題があることが考えられるため、突き出し部分177のEPE測長結果が、所定の閾値を超えた場合に、その旨を操作者に通知するためのエラー信号を発生するようにしても良い。
【0141】
また、突き出し部分177が大きかったとしても、ゲートパターンの他の測長個所175も同様に大きければ、それはCMPの研磨条件等の問題ではない可能性が高い。よって、突き出し部177の測長結果と共に、ゲートパターンの他の測長個所175の測長を行い、両者の比率が所定の大きさを超えた場合と、所定の大きさ未満の場合とで、操作者に対するメッセージを変化させるようにしても良い。
【0142】
更に、半導体ウェハの1チップ単位、或いは所定の領域単位の測長結果をウェハマップ状に表示することによって、突き出し部xxが形成される理由をより明確に特定することが可能となる。
【0143】
例えば、ウェハ全体に亘って突き出し部が大きく形成されるような場合には、CMPによる研磨が過剰な場合や、絶縁材料の組成に問題がある場合がある。また、ウェハの一部領域に偏って、大きな突き出し部177が形成される場合は、ウェハの反りや、CMPに用いられる研磨用パッドが偏って磨耗していたりすることが考えられる。また、同心円状に同じような測長結果が検出される場合も、研磨用パッド自体に問題があることが考えられる。
【0144】
また、ウェハマップを形成する場合には、1チップ毎、或いは所定の領域単位毎に、1の測長結果、又は2以上の測長結果の平均値を、所定の範囲の測長結果ごとに識別表示すると、視覚的にウェハ全体の傾向を判断することができる。
【実施例12】
【0145】
図18は、アクティブエリア181上に、ゲートパターン182を重ねることによって、形成されるトランジスタを、評価するのに好適な手法を説明するための図である。本例では特に実際に形成されたトランジスタ領域184(SEMエッジによって特定されるトランジスタ領域)と、アクティブエリアのデザインデータ183上の理想的なトランジスタ形状を比較することによって、トランジスタの評価を行う例について説明する。
【0146】
まず、走査電子顕微鏡像を形成し、その中からSEMエッジのアクティブエリア181と、SEMエッジのゲートパターン182が重なる領域を、実トランジスタ領域183として抽出する。次に、アクティブエリアのデザインデータ185と、アクティブエリアのSEMエッジ181との間でパターンマッチングを行い、両者の位置合わせを行う。
【0147】
位置合わせを行った状態において、アクティブエリアのデザインデータ185と、ゲートパターンのSEMエッジ182が重なる領域は、アクティブエリアがデザインデータ通り適正に形成されている場合に、形成されるデザインデータ上のトランジスタ領域183である。EPE測長、或いは画像処理等によって、デザインデータ上のトランジスタ領域のX,Y方向の長さ、或いは面積を測定し、その結果に基づいて、実画像上のトランジスタ領域184と、デザインデータ上のトランジスタ領域183との比較を行う。当該比較によって、デザインデータ上の理想的なトランジスタに対する、実際のトランジスタの性能を評価することができ、結果として、半導体プロセスの評価が可能となる。
【0148】
トランジスタの評価は、トランジスタの一方向の長さや面積等の差分,比率等、両者の相対的な評価ができるものであれば、その種類は問わない。
【0149】
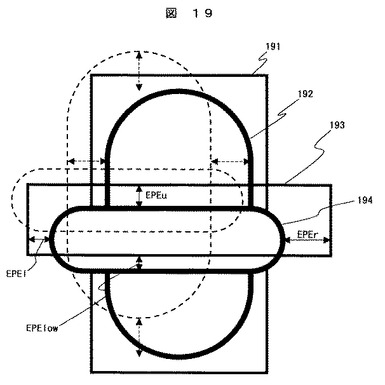
図19は、アクティブエリアのデザインデータ191と、アクティブエリアのSEMエッジ192とのマッチングを行い、その上でデザインデータ上のゲートパターン193と、SEMエッジのゲートパターンとの間のEPE測長を行う例について説明する図である。
【0150】
両アクティブエリア間のマッチングを行った上で、測定されるEPE測長結果(EPEu,EPElow,EPEr,EPEl)は、アクティブエリアとゲートパターンの理想的な相対位置関係から、どれだけずれて両パターンが形成されているかを示すものであり、このようなステップを経てEPE測長を行うことによって、パターン全体の位置ずれに左右されることのないトランジスタの性能評価を行うことができる。
【0151】
図20は、アクティブエリアとゲートパターンについて、別々にマッチングを行い、その際のシフト量に基づいて、両者の重なりの程度(オーバーレイ精度)を測定する例を説明するための図である。アクティブエリアのマッチングシフト量は(ΔXact,ΔYact)であり、ゲートパターンのマッチングシフト量は(ΔXgate,ΔYgate)である。この両シフト量の差(ΔXact−ΔXgate ,ΔYact−ΔYgate)がオーバーレイ精度を示す指標となる。両者のシフト量差がない状態とは、少なくともゲートパターンとアクティブエリアの相対関係が、デザインデータと一致する状態である。本例によれば、2つのシフト量の差異を評価することによって、形成されたパターン自体の位置ずれに左右されることなく、正確にオーバーレイ精度を測定することが可能となる。
【図面の簡単な説明】
【0152】
【図1】走査形電子顕微鏡の概略を説明する図。
【図2】デザインデータと電子顕微鏡画像を重ねた状態を示す図。
【図3】図2のアウターコーナー周辺の拡大図。
【図4】パターンについて全方位測長を行った結果をグラフとして表した図。
【図5】EPE測長の一例を説明するフローチャートである。
【図6】所定値を越えたEPE測長結果を選択的にサンプリングする例を説明するフローチャートである。
【図7】全方位のEPE測長結果を表形式で表示する例を説明する図。
【図8】複数のパターンが積層形成され半導体素子を構成するパターンについてEPE測長を行う例を説明する図。
【図9】EPE測長結果の分類を説明するフローチャートである。
【図10】デザインデータを基準として、EPE測長方向を決定する例を説明する図。
【図11】上層,下層、及び上層と下層を接続するためのコンタクトホール間でEPE測長を行う例を説明する図。
【図12】複数のコンタクトホールが形成される領域について、デザインデータと SEMエッジを重ねる例を説明する図。
【図13】2つのパターンが積層された半導体素子のデザインデータと、SEMエッジを重ねた例を示す図。
【図14】重ね合わせ精度を検出するステップを示すフローチャート。
【図15】光学式半導体露光装置によって露光され、パターンが形成されたチップの一例を示す図。
【図16】上層部に形成されたパターンと、下層部に形成されたパターン間のオーバーレイ精度を計測する例を説明する図。
【図17】アクティブエリア,絶縁体で形成されたステップ、及びゲートパターンが重なる部分の拡大図。
【図18】アクティブエリア上に、ゲートパターンを重ねることによって、形成されるトランジスタを、評価するのに好適な手法を説明するための図。
【図19】デザインデータ上のゲートパターンと、SEMエッジのゲートパターンとの間のEPE測長を行う例を説明する図。
【図20】アクティブエリアとゲートパターン間のオーバーレイ精度を測定する例を説明する図。
【図21】2つのパターンが隣接する場合のEPE測長結果の分類手法を説明する図。
【図22】EPE測長結果の表示例を説明するための図。
【図23】デザインデータに対し、SEMエッジがずれている例を説明する図。
【図24】EPE測長結果を所定の領域単位でマップ状に表示する例を説明する図。
【図25】オーバーレイ精度を評価するステップを説明するフローチャート。
【図26】EPE測長の測定工程の一例を示すフローチャート。
【図27】オーバーレイ精度を評価するステップを説明するフローチャート。
【図28】EPE測長結果を三次元的に表示する例を説明する図。
【符号の説明】
【0153】
1…陰極、2…第一陽極、3…第二陽極、4…一次電子線、5,6…収束レンズ、7…対物レンズ、8…絞り板、9…走査コイル、10…試料、11…直交電磁界発生装置、
12…二次信号、13…二次信号検出器、14…信号増幅器、15…ステージ。
【技術分野】
【0001】
本発明は、パターンの測長方法,パターンの検査装置、及びパターンの測長を行うためのコンピュータープログラムに関し、特にパターンの設計データと実画像を比較することにより、パターンに関する寸法を測長する方法,装置に関する。
【背景技術】
【0002】
CAD(Computer Aided Design) データを用いて、半導体集積回路上のパターンを測定することが知られている。CADデータのような設計データは、半導体素子が本来あるべき理想的な形状を示すものであるため、CADデータと実際に形成されたパターンを比較することによって、半導体製造プロセスの評価が可能となる。特許文献1には、検査対象パターンと基準パターンのエッジ検出を行い、検出されたエッジを比較することによって、設計データに対するパターンの変形量を検出することが開示されている。
【0003】
【特許文献1】特開2001−338304号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
昨今、半導体集積回路は、ますます微細化,多層化が進み、それに伴って、半導体検査装置の性能も向上してきた。そのような半導体検査装置の1つにCD−SEM(CriticalDimension Scanning Electron Microscope)がある。CD−SEMは、電子ビームを試料上に走査することによって得られる二次電子に基づいて、試料上に形成されたパターンの寸法を測定する装置である。特許文献1には、CD−SEM等で形成されたパターン画像とCADデータを比較することによって、パターンの変形量を検出することが開示されているが、以下のような問題がある。
【0005】
半導体ウェハ上には、多数のパターンが形成され、そのパターンが例えばトランジスタ等の半導体素子を構成している。このような半導体素子は、半導体素子の設計段階において、所定の性能を実現するようにその大きさやパターン間の接合領域の大きさ等が決定される。
【0006】
しかしながら、特許文献1に開示の技術は、昨今の複雑化,多層化された素子の測定を行うのに十分なものではなかった。第1に、特許文献1に開示の技術は、複雑ゆえ、非常に多くの測長点が想定される半導体素子の測定について、測定効率を考慮した測定について何も考慮されていなかった。第2に、特許文献2に開示の技術は、半導体素子が複数の層に亘って形成されることについて何も考慮されていなかった。
【0007】
本発明の主たる目的の1つは、複雑化・多層化された素子を測長するのに好適な試料寸法測定方法、及び試料寸法測定装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明によれば、上記目的を達成するために、半導体素子のデザインデータを用いて、試料像上のパターンの寸法を測定するに当たり、試料像、或いは測定対象の半導体素子の状況に応じて、測定条件を変化させる方法、及び装置を提案する。このような構成によれば、試料像の状態や試料上に形成されている素子の状態に応じて、適切な測定条件を選択することができるため、測定効率の向上が可能となる。
【0009】
更に、本発明によれば、複数層に形成される複数のパターン間の測長を、デザインデータを用いて行うことを提案する。このような構成によれば、半導体素子の性能や、下層に対する上層の形成状態を客観的に評価するための測定方法、及び測定装置の提供が可能となる。
【0010】
本発明の他の構成、及び更なる具体例は、発明を実施するための最良の形態の欄にて、明らかにする。
【発明の効果】
【0011】
本発明における主たる効果の1つは、複雑化・多層化した半導体素子を測長するのに好適な試料寸法測定方法、及び装置を提供することが可能となる。
【発明を実施するための最良の形態】
【0012】
以下に、図1を用いて走査形電子顕微鏡(以下、Scanning Electron Microscope:SEMと呼ぶ)の概略を説明する。陰極1と第一陽極2の間には、制御プロセッサ40で制御される高圧制御電源20により電圧が印加され、所定のエミッション電流で一次電子線4が陰極1から引き出される。陰極1と第二陽極3の間には、制御プロセッサ40で制御される高圧制御電源20により加速電圧が印加され、陰極1から放出された一次電子線4が加速されて後段のレンズ系に進行する。
【0013】
一次電子線4は、レンズ制御電源21で制御された収束レンズ5で収束され、絞り板8で一次電子線の不要な領域が除去された後に、レンズ制御電源22で制御された収束レンズ6、および対物レンズ制御電源23で制御された対物レンズ7により試料10に微小スポットとして収束される。対物レンズ7は、インレンズ方式,アウトレンズ方式、およびシュノーケル方式(セミインレンズ方式)など、種々の形態をとることができる。また、試料に負の電圧を印加して一次電子線を減速させるリターディング方式も可能である。さらに、各々のレンズは、複数の電極で構成される静電型レンズで構成してもよい。
【0014】
一次電子線4は、走査コイル制御電源24によって制御される走査コイル9で試料10上を二次元的に走査される。一次電子線の照射で試料10から発生した二次電子等の二次信号12は、対物レンズ7の上部に進行した後、二次信号分離用の直交電磁界発生装置
11により、一次電子と分離されて二次信号検出器13に検出される。二次信号検出器
13で検出された信号は、信号増幅器14で増幅された後、画像メモリ25に転送されて画像表示装置26に試料像として表示される。走査コイル9と同じ位置に対物レンズ用アライナー制御電源31によって制御される2段の偏向コイル(対物レンズ用アライナー)
51が配置されており、試料10上における一次電子線4の位置(観察視野)を二次元的に制御できる。ステージ15は、少なくとも一次電子線と垂直な面内の2方向(X方向,Y方向)に試料10を移動することができる。
【0015】
ポインティング装置41は、試料像の位置を指定してその情報を得ることができる。入力装置42からは、画像の取り込み条件(走査速度,画像積算枚数)や視野補正方式などの指定、および画像の出力や保存などを指定することができる。
【0016】
なお、画像メモリのメモリ位置に対応したアドレス信号が、制御プロセッサ40内、或いは別に設置されたコンピュータ内で生成され、アナログ変換された後に、走査コイルに供給される。X方向のアドレス信号は、例えば画像メモリが512×512画素(pixel) の場合、0から512を繰り返すデジタル信号であり、Y方向のアドレス信号は、X方向のアドレス信号が0から512に到達したときにプラス1される0から512の繰り返しのデジタル信号である。これがアナログ信号に変換される。
【0017】
画像メモリのアドレスと電子線を走査するための偏向信号のアドレスが対応しているので、画像メモリには走査コイルによる電子線の偏向領域の二次元像が記録される。なお、画像メモリ内の信号は、読み出しクロックで同期された読み出しアドレス生成回路で時系列に順次読み出すことができる。アドレスに対応して読み出された信号はアナログ変換され、画像表示装置26の輝度変調信号となる。
【0018】
また本例で説明する装置は、検出された二次電子或いは反射電子等に基づいて、ラインプロファイルを形成する機能を備えている。ラインプロファイルは一次電子線を一次元、或いは二次元走査したときの電子検出量、或いは試料像の輝度情報等に基づいて形成されるものであり、得られたラインプロファイルは、例えば半導体ウェハ上に形成されたパターンの寸法測定等に用いられる。
【0019】
なお、図1の説明は制御プロセッサ40が走査電子顕微鏡と一体、或いはそれに準ずるものとして説明したが、無論それに限られることはなく、走査電子顕微鏡鏡体とは別に設けられたプロセッサで以下に説明するような処理を行っても良い。その際には二次信号検出器で検出される検出信号を画像としてプロセッサに伝達したり、プロセッサから走査電子顕微鏡のレンズや偏向器等に信号を伝達する伝達媒体と、当該伝達媒体経由で伝達される信号を入出力する入出力端子が必要となる。
【0020】
更に、本例装置は、例えば半導体ウェハ上の複数点を観察する際の条件(測定個所,走査電子顕微鏡の光学条件等)を予めレシピとして記憶しておき、そのレシピの内容に従って、測定や観察を行う機能を備えている。
【0021】
また、以下に説明する処理を行うプログラムを記憶媒体に登録しておき、走査電子顕微鏡等に必要な信号を供給するプロセッサで、当該プログラムを実行するようにしても良い。即ち、以下に説明する例は画像を取得可能な走査電子顕微鏡等の荷電粒子線装置に採用可能なプログラム、或いはプログラムプロダクトとしての説明でもある。
【0022】
更に、制御プロセッサ40には、半導体ウェハ上のパターンの設計データを記憶し、
SEMの制御に必要なデータに変換するCAD(Computer Aided Design) データ管理部
50を接続しても良い。当該CADデータ管理部50は、入力されたCADデータに基づいて、上記SEMを制御するレシピを作成する機能を備えている。また、制御プロセッサ40から伝達される信号に基づいて、レシピを書き換える機能をも備えている。また、以下に説明する処理を当該CADデータ管理部50内に設けられたプロセッサで行っても良い。更に、制御プロセッサ40に代わってCADデータ管理部50内に設けられたプロセッサによって、走査電子顕微鏡を制御するようにしても良い。
【0023】
なお、本例の説明ではCADデータ管理部30が、制御プロセッサ40と別体のものとして説明するが、これに限られることはなく、CADデータ管理部50が一体であっても良い。
【0024】
本例においては試料10として、半導体製品を製造する工程の中にあるウェハとした。リソグラフィー工程によりウェハ上に形成されたレジストパターンを用いた。その比較対象として、そのパターンのもととなる半導体回路設計(デザイン)データ(CADデータ)を用いた。
【0025】
ここで用いる半導体回路設計データとは、最終的に半導体回路パターンとして所望される理想のパターン形状である。なお、以下の説明は、検査対象を半導体ウェハとしたが、設計データと評価したい対象が対をなしていればこれに限ることはない。また、回路設計データは、回路設計データを表示するソフトウェアがそのフォーマット形式を表示でき図形データとして取り扱うことができれば、その種類は問わない。
【実施例1】
【0026】
以下に図面を用いて、電子顕微鏡画像のエッジ部分(以下、SEMエッジと称することもある)とデザインデータとの距離を計測(以下EPE(Edge Placement Error)測長と称することもある)する例について説明する。
【0027】
図2は、デザインデータと、電子顕微鏡画像を重ねた状態を示す図である。EPE計測は、デザインデータとSEMエッジ間の距離を計測するものであるが、図2に説明するように、実際の半導体素子は、例えばパターンの角部が潰れ、丸まって形成されることが多い。このように形成されるパターンについてEPE計測を行う場合、如何なる方向に測長を行うかの判断が困難であることがある。
【0028】
本例では、このような問題に鑑み、SEMエッジの形成方向に応じて、EPE計測を行うときの測長方向を決定することを提案する。以下に図2を用いて、デザインデータ61とSEMエッジ62間のEPE測長を行う例を用いて、本実施例を詳細に説明する。図2は、SEMエッジ62の全方向の測定を行う例を説明する図である。図2に示す例では測長部位を、(1)ラインパターンの先端(以下、ラインエンド63と称する),(2)ライン側部(以下、ラインエッジ64と称する),(3)パターンの屈折部の内側(以下、インナーコーナー65と称する)、及び(4)パターン屈曲部の外側(以下、アウターコーナー66と称する)に分類している。
【0029】
このように分類する理由として、パターンの部位ごとにその重要度や、パターンの変形要因が異なるからであり、その重要度や変形要因に応じた評価が必要になるからである。例えば、ラインエンド63とラインエッジ64では、ラインエンド63が図示しない他のパターンと接合する場合、ラインエンド63をより厳しく(許容誤差を小さく)評価する必要がある。また、パターンの角部等にはパターンの変形を抑制すべく光近接効果補正
(Optical Proximity Correction:OPC)パターンを付加することがあり、当該部分とラインエッジ間では違った評価が必要になることがある。
【0030】
以上のように、パターンの部位ごとの分類は、EPE測長値の評価を行う上で非常に重要である。本例では、パターンの部位ごとに、正確にパターンの測定方向を決定するべく、SEMエッジに対して、垂直な方向に測長方向を設定することを提案する。
【0031】
図3は、図2のアウターコーナー66周辺の拡大図であるが、仮にデザインデータを基準にその垂直方向を測長方向として決定した場合、例えば測長方向68のような方向に測長方向が決定されることになる。よって、測長基準点69は、ラインエッジ64に属する測長点と分類されてしまうことになる。
【0032】
しかしながら、測長基準点69は本来アウターコーナー66に属するものとして分類されるべきである。測長基準点69は明らかに何等かの原因でパターンの角部が丸まって形成されたが故に、形成された部分であり、ラインエッジ64とは測長寸法の変動要因が大きく異なるためである。
【0033】
以上のように、パターンの各部は、個々にその変動要因やその重要度が異なり、測長結果を分類して管理することが、寸法評価の観点から望ましい。
【0034】
そのため、本例によればSEMエッジ62に対し、垂直な方向に測長方向70を設定するようにした。このような手法により、パターンの変形要因に由来する適正な方向に、測長方向を設定することが可能となると共に、適正なEPE測長結果の分類を行うことが可能となる。
【0035】
以下に、パターンの全方位にEPE測長を行う場合の更なる具体例について説明する。図4は、図2のパターンについて全方位測長を行った結果をグラフとして表した図である。図4のグラフは図2の一点鎖線部の測長結果を抽出したものである(但し、図4の測長結果そのものは図2の測長結果に必ずしも一致するものではない)。
【0036】
図4に示す例では、パターンの部位の分類ごとに、許容誤差の閾値を変化させている。このようにパターンの部位の分類ごとにEPE測長の誤差許容値を設定することによって、EPE測長結果を画一的に評価してしまうことによる測定点数の増大、或いは本来評価すべき測定点の見落としを防止することができる。閾値71,72,73,74は、それぞれラインエンド63,ラインエッジ64,インナーコーナー65,ラインエッジ64に与えられたものである。
【0037】
本例の場合、インナーコーナー65に比較して、ラインエッジ64の誤差許容値を小さく設定している。コーナー部はエッジ部に対して、エッジ垂直方向に奥行きがあるため、多少の寸法変動では、断線等のリスクが少ないからである。
【0038】
また、図21に図示するように、2つのパターン200,203が隣接する場合、ラインエンド201とラインエンド202では、寸法精度の重要度が異なる。ラインエンド
202は隣接するラインパターン203の近くに位置しているため、パターンの形成誤差によっては接触の可能性がある。一方、ラインパターン203の部分204も同様であり、他のラインエッジ部とは、寸法精度の重要性が異なる。パターンの中でも特に接触のリスクがある部分については、他の部分に対して厳密(例えば誤差許容量を小さく設定する)に管理することによって、半導体製造プロセスにおいて、歩留まり向上のための施策を早期に講ずることができる。
【0039】
また、2つのパターンが近接する部分205をホットスポットとして登録し、EPE測長個所が当該ホットスポットと重畳したときに、より厳しい寸法管理を行うようにしたり、測定点を増加する等の測定項目の調整を自動で行えるようにプログラムしておけば、操作者はより簡便に測長項目の設定(レシピの作成)を行うことが可能になる。図21では、部分205内に設定された測長点が識別可能なように、点線で表示されている。このように測長個所の重要度に応じて、表示装置上で測長個所を識別表示するようにすれば、操作者は、測長点位置や測長点数の適否を表示装置上で確認することが可能となる。
【0040】
以上のように、パターンの異なる領域ごとに、異なる誤差許容値を設定することで、部位ごとの重要度に沿った適正な寸法管理を行うことが可能となる。なお、本例の場合、全方位のEPE測長結果を、図7に示すように、表形式で記憶させ、設定された誤差許容値を越えたEPE測長結果を、他の測長結果と識別できるように、識別表示することで、再評価すべきパターンが明確するようにすると良い。図7の例の場合、EPE測長結果に
“★”印を表示させることによって、他の測長結果を識別表示するようにした。このように構成すれば、管理者は許容誤差を越えた部位のみを選択的に評価することができ、評価効率の向上に効果がある。
【0041】
更に、図2にて説明したように、全方位のEPE測長を行うことによって、デザインデータに対して、パターン自体がずれているのか、パターンの一部が変形しているのかの判断を行うことが可能となる。全方位へのEPE測長を行った結果、一部のみ大きな誤差が出るようであれば、それはその領域のみが何等かの理由で、変形していることが考えられる。しかしながら、例えば或る方向のEPE測長値が大きなマイナスを示し、その反対側のEPE測長値が大きなプラスを示すような場合、パターンはそのプラス方向に大きくずれて形成されている可能性がある。
【0042】
図2に示すような全方位へのEPE測長を行うことによって、パターンの一部が変形しているのか、パターン自体がずれて形成しているのかを判断することが可能となる。この場合、図4に示す閾値71,72,73,74とは異なる閾値を設けておくことが考えられる。例えば、パターンの第1の方向に当たるパターンの部位に、第1の閾値を設けておき、当該部位の反対側に当たる第2の部位に、第2の閾値を設けておく。この場合、第1と第2の閾値は正負が逆になるようにする。このような条件下で、EPE測長結果が、第1,第2の閾値を何れも超えるような場合、上記第1の方向か、第2の方向にパターンがずれて形成されていることが推定できる。
【0043】
図5を用いて、本例の測長プロセスを説明する。先ず、制御プロセッサ40に対し、入力装置からの指定によって、予め記憶された測定個所,走査電子顕微鏡の光学条件等を記録したレシピを読み込む(S0001)。そして、制御プロセッサ40は、S0001にて読み込まれたレシピを元に、画像取得パラメータ、及びSEMの光学条件を設定する
(S0002)。この設定された画像取得パラメータ、及びSEMの光学条件を元にSEM画像を取得する(S0003)。
【0044】
次に、取得されたSEM画像を元にSEM画像のエッジ抽出を行う。この部分の処理には、例えば、ソーベルフィルタ等のエッジ強調フィルタが用いられる(S0004)。次に取得されたSEM画像に相当するデザインデータを読み出す(S0005)。
【0045】
デザインデータとSEMエッジ間の測長を行うに当たり、両者の位置合わせを行うために、SEM画像とデザインデータの双方が有する基準パターン(例えば高倍率のSEM画像を取得するために設けられたアライメントパターン)を基準として、両者の位置合わせを実行する。測定対象パターンについて、一般的なパターンマッチングによる位置合わせを行った場合、正確なEPE計測を実行することができなくなる恐れがあるため、SEMエッジとデザインデータの双方が持つ基準パターン間のパターンマッチングを行うことで、SEMエッジとデザインデータの測長パターンの位置合わせを行う(S0006)。
【0046】
次にレシピに記録されているデザインデータ上の測長基準位置61に対し、その垂線が測定基準位置と交差するようなSEMエッジ上の測定基準位置63を画像処理により検索する(S0007)。本例の場合、パターンの全方位について測定基準位置を検索する。そして検索されたSEMエッジ上の測定基準位置63と、デザインデータ上の測定基準位置61間の測長を行う(S0008)。
【0047】
本例の場合、レシピに設定された測長基準位置61に基づいて、SEMエッジ上の測長基準位置63を検索する例について説明したが、それに限られることはなく、例えばSEM画像を取得後、SEM画像上の任意のSEMエッジを、オペレータが入力装置等で指定し、そのSEMエッジと、当該SEMエッジの垂線上に位置するデザインデータの輪郭間の測長を行うようにしても良い。
【0048】
次に、パターンの部位の分類ごとに、割り当てられた閾値との比較を行う(S0009)。本例の場合、閾値71,72,73,74と、EPE測長結果を比較する。この結果は例えば表形式で記憶され、閾値を超えた測長結果は、他の測長値と識別して、或いは閾値を超えた測長結果のみが記憶される(S0010)。また、この測長結果を表示する場合に、他の測長結果に対して色分け,点滅等の識別表示を行うようにすれば、操作者は目視で再評価すべき測長部位を特定することができる。
【0049】
次に、パターンの一部が変形しているのか、パターン自体がずれて形成されているのかを比較するために、パターンの所定の方向と、その反対の方向のEPE測長結果が、いずれも所定の閾値を越えており、且つそのずれの方向が正負逆になっているかの判定が行われる(S0011)。この判定結果も上記表形式で記憶しても良いし、パターンがずれている旨を表示するようにしても良い。
【0050】
図22は、EPE測長結果の表示例を説明する図である。図22(a)は、検出されたSEMエッジ221と、デザインデータ222間のEPE測長を行った結果をSEMエッジ、及び/又はデザインデータ上に重ねて表示する例を説明する図である。
【0051】
点線223は、EPE測長結果が仕様内(理想値に比べて所定の誤差範囲(閾値)内に収まった測長個所)に収まった測長個所を示している。一点鎖線224は、EPE測長結果が仕様外となった測長個所であり、理想値と比較して負の測長結果となった測長個所を示している。実線225は、EPE測長結果が仕様外となった測長個所であり、理想値と比較して正の測長結果となった測長個所を示している。
【0052】
このように測長結果を、仕様内外で識別して表示することによって、操作者は仕様外となった測長個所を選択的に確認することができるため、半導体プロセスの条件判断を容易に実現できるようになる。
【0053】
特に、本例のようにパターンに対して全方位での測長を行った場合、パターンの形成位置自体がずれているのか、パターンの変形によって、EPE測長結果が仕様外となっているのか、目視で容易に判断可能となる。
【0054】
また、全方位測長結果を、チップ単位、或いは光学式露光装置のショット単位で、且つ所定の方向ごとに平均値等を算出し、その算出結果を、チップ単位、或いはショット単位でウェハマップ状に表示する。これによって、チップ或いはショット単位での全方位測長結果を、他のチップ、或いはショットと対比しつつ、目視で確認することが可能となる。
【0055】
更に、例えば図23に説明するように、デザインデータ231に対し、SEMエッジ
232が図面下側にずれているような場合、SEMエッジ232がデザインデータ232に対しずれてしまった要因を特定する必要があるが、デザインデータの大きさに対しSEMエッジの大きさがどの程度変化しているかによって、その重要度が異なる場合がある。例えばSEMエッジの寸法がデザインデータと比較して極めて小さくなっている場合(例えば、Th1<│Dy−(EPEu+EPEl)│)、SEMエッジ寸法とデザインデータの寸法差があまりない状態と比較すると、EPElが仮に同じであったとしても、図23の下側方向へのパターンのシフト量が非常に大きなものとなる。よって、Th1<│Dy−(EPEu+EPEl)│の場合と、Th1≧│Dy−(EPEu+EPEl)│とで識別して、測長個所を表示するようにすると良い。
【0056】
ウェハマップ状に表示するときも同様であり、デザインデータに対するパターンの大きさの情報と、SEMエッジのシフト量に関する情報を重畳して表示しておけば、操作者は、同じEPE測長結果が得られたとしても、その深刻さを目視にて判断することが可能となる。
【0057】
図22(b)は、図22(a)の矢印表示に換えて、SEMエッジを、仕様内,仕様外(プラス,マイナス)とで識別して表示する例を示す図である。本例では仕様内のEPE測長結果が得られた場合、点線でSEMエッジを表示し、仕様外(マイナス)のEPE測長結果が得られた場合、SEMエッジを一点鎖線で表示している。そして、仕様外(プラス)のEPE測長結果が得られた場合は、実線でSEMエッジを表示するようにした。このように、SEMエッジを示す線を、EPE測長結果に基づいて、識別して表示することによって、測長結果の傾向を目視で判断することが可能になる。
【0058】
図22(c)はデザインデータを基準としてEPE測長の方向を定めた例を説明する図である。図22(a)では、SEMエッジを基準として、SEMエッジに対し垂直な方向に向かって、測長方向を設定し、SEMエッジ−デザインデータ間の測長を行っているが、図22(c)では、デザインデータに対し垂直な方向に測長方向を設定している。このような測長方向の切り替えと共に、EPE測長結果に基づく仕様内,仕様外の表示も切り換えて行うことによって、オペレータはそのパターンの測長を行うに当たって、どのような方向に測長方向を設定すれば良いか、実際のSEMエッジを確認しながら判断することができる。
【0059】
図22(d)は、図22(b)の線表示に換えて、十字,三角、及び四角マークで、それぞれ、仕様内EPE測長結果,仕様外(マイナス)測長結果、及び仕様外(プラス)測長結果を表示するようにしたものである。本例に限らず、マーク自体が測長結果を反映する形状であれば、種々の形状のものが適用可能である。
【実施例2】
【0060】
以下に、図面を用いて、デザインデータとSEMエッジ間の測長結果に基づき、サンプリング点を決定する例について説明する。図2に示すように、1つのパターンのEPE計測を行う場合、非常に多くの測長基準位置候補が考えられる。しかしながら、全ての測長基準位置候補の測長結果から、パターンを評価することは、非常に時間と手間を要し、測定効率上好ましくない。一方でパターンが理想形状(デザインデータ)からどのように変形するかを予め判断するのは非常に困難であり、レシピによって設定した測定基準位置が必ずしも適正な測長個所であるという保障はない。
【0061】
本例では、上記問題に鑑み、複数部分のデザインデータとSEMエッジ間の測長を行い、測長値が所定の閾値を超えた部位をサンプリング点とすることを提案する。即ち、デザインデータから大きく寸法が変化する部分は、評価対象として重要である点に鑑み、その部分を選択的にサンプリングすることによって、測定効率の向上を実現することを提案する。
【0062】
図6を用いて、本例の測長プロセスを説明する。なお、図5と同様のステップは説明を省略する。先ず、図5の例と同様に、制御プロセッサ40はレシピに記憶された光学条件等に基づいて、SEM画像を取得する(S0001〜S003)。
【0063】
以上のように取得されたSEM画像とデザインデータとの間でEPE測長を行う
(S0007)。デザインデータ上には複数の測長基準位置(図2の例の場合、35点)が設定されており、複数の測長基準位置ごとに、SEMエッジとの間で測長を行う。このようにして得られた複数の測長結果を、予め定められた所定値(閾値)と比較する
(S0007)。この比較の結果、所定値を超えた部位をサンプリング点とし、その測長結果を測長部位の位置情報と共に記憶媒体に記憶する(S0008)。
【0064】
このように所定値を超えた部分を選択的にサンプリングすることによって、後のパターン評価を効率良く実行することができる。なお、本例では所定値を超えた測長部位に関する情報のみを選択的に記憶する例について説明したが、これに限られることはなく、例えば図2の場合、35点全ての測長値を記憶し、所定値を越えた点がどの点か判るように、測長位置情報にフラグを立てて、後の評価において、それらの測長点を容易に判断できるようにしても良い。測長位置,測長結果、及び所定値を超えたか否かのフラグは表形式にして記憶しても良いし、例えば図2に図示するように、SEM画像とデザインデータの重畳画像上に、所定値を超えた測長位置を他の測長位置と比較して識別して表示するようにしても良い(図2の場合、点線表示によって、所定値を超えた測長点を識別表示するようにした)。
【実施例3】
【0065】
以下に、図面を用いて、測長結果を、その測長位置に関連するデザインデータの状態に基づいて、分類する例について説明する。図8は、複数のパターンが積層形成された例を示すものであり、アクティブエリア(アンダーレイヤー)80上に、ポリゲート(ターゲットレイヤー)81が積層されたパターンのSEM画像に、アンダーレイヤーとターゲットレイヤーのデザインデータ82,83を重ねた表示例を示す図である。
【0066】
半導体素子を構成する複合パターンについて、EPE測長を行う場合、非常に多くの測長位置候補が存在する。しかしながら、全ての測長基準位置候補の測長結果に基づいて、パターンを評価することは、非常に時間と手間を要し、測定効率上好ましくない。
【0067】
以下に、半導体素子の性能を決定する部分は、測定対象として重要であるのに対し、半導体素子の性能を大きく左右しない部分は、測定対象としての重要度が低いという知見から、半導体素子を構成するパターンの測長を行う場合、測長位置におけるデザインデータの状態に応じて測長結果を分類することで、評価対象として重要な測長結果と、そうでない測長結果を選別し、SEM画像を用いた半導体素子評価を高効率に実現する例について説明する。
【0068】
即ち、本例ではデザインデータの部位ごとに、測長結果の分類を行うことを説明する。
【0069】
図8の場合、測長部位Aはアクティブエリアとポリゲートが重なる部分であり、測長対象として非常に重要である。一方、測長部位Bは、多少細くなったとしても、トランジスタの性能に大きく影響しない部分である。このように、1つのポリゲートであってもそのデザインデータの状態(特に接続される他のパターンとの関係)に応じて、その重要度が変化する。
【0070】
本例は半導体素子の性能を評価するツールとして、デザインデータの特徴位置毎に、測長結果を選別して登録することを提案する。図9を用いて、本例の測長結果の選別プロセスを説明する。
【0071】
先ず、図5等と同様に、制御プロセッサ40はレシピに記憶された光学条件等に基づいて、SEM画像を取得する(S0001〜S003)。以上のように取得されたSEM画像とデザインデータとの間でEPE測長を行う(S0007)。デザインデータ上には多数の測長基準位置が設定されており、多数長基準位置ごとに、SEMエッジとの間で測長を行う。なお、本例の場合、測長位置はレシピに登録されているものとして説明しているが、これに限られることはなく、SEM画像とデザインデータの重畳画面上で、入力装置によって、任意に設定しても良い。
【0072】
上記S0007にて得られた複数の測長結果を、予め定められた分類、或いはデザインデータから得られる素子の情報に基づいて分類する(S0008)。例えば図8のゲートパターン81の場合、大別して3つの分類に分けられる。先ず第1に、アクティブエリアと重なる部分に関する測長部位A,アクティブエリアとは重ならない部分に関する測長部位B、及び第3にターゲットレイヤーの上層に形成されるコンタクトホールと重なる部分に関する測長部位Cである。
【0073】
上述のように、測長部位Aは非常に重要な評価対象である。一方、測長部位Bは上述のように、評価対象としての優先順位は低い。更に測長部位Cは、上層に形成されるパターンの種類によって、重要度が変化する。なお、以下の説明では測長部位Cは、上層に形成されるパターンとの関係から重要な測長部部位であり、測長部位Dは、上層に形成されるパターンとの関係から、評価優先順位の低いパターンであるとして説明する。このように本例によれば、重要な評価対象とそれ以外を分類した上で評価することができるため、測定効率向上に効果がある。
【0074】
更に、上記の例では素子の状態ごとに測長部位を分類することについて説明したが、単に各測長結果がどの分類に属するのかが判るような、目印を付けておくだけでも良い。測定位置に対する測長結果を表形式に記憶し、その表に測長結果がどの分類に属するかの識別記号等を追加するようにしても良い。また、分類の類型には様々なものが考えられるが、1つとして『半導体素子の特性に大きく影響を与える部分』と『それ以外の部分』で大別することが考えられる。他にも『他のパターンとの接合部分(或いは接合予定部分)』と『それ以外の部分』で大別することが考えられる。これらの組み合わせは2つに限らず、3つ以上でも良く、更に種々の類型を組み合わせて新たな分類を作成するようにしても良い。
【0075】
図10は、図2の説明に用いたパターンのEPE測長に関し、デザインデータ61を基準として、測長方向を決定する例を説明する図である。本例の場合は、デザインデータ
61に対し、垂直な方向に測長方向を設定している。但し、アウターコーナー66とインナーコーナー65は、コーナーを形成する2本の直線の交点から、当該直線に対し45°の方向に向くように測長方向を設定した。このようにデザインデータベースで測長方向を決定することによって、形成されるSEMエッジに因らず、画一的に測長方向を決定することが可能となる。
【実施例4】
【0076】
上記実施例3にて説明したように、同じ半導体素子の中でも評価対象として重要なものとそうでないものがある。測定精度の観点からも、重要な評価対象は高精度に測定しなければならない反面、重要度の低い評価対象は、比較的低い測定精度で足りる。
【0077】
パターンの測長値が、デザインデータの寸法値から大きく変化している場合には、そこには何らかのプロセス上、或いはパターン設計上の問題があることが考えられる。この問題を究明するためにEPE測長が行われるが、測長効率の観点から、許容誤差を設定し、デザインデータの寸法値とパターンの測長値との差異が所定の許容誤差内にある場合は、そのパターンは適正に形成されているものと判断することが望ましい。
【0078】
本例では、上記許容誤差を測定対象の重要度に応じて変化させることによって、測長誤差を画一的に決定することによる評価精度の低下、或いは測長効率の低下を防止する手法を提案する。例えば実施例3にて説明した測長部位Cと測長部位Dは、ほぼ同様の測長対象であるが、上述のように測長部位Cはコンタクトホールを経由して上層に形成されるパターンとの関係から、重要な測長部部位であり、測長部位Dは、上層に形成されるパターンとの関係から、評価優先順位の低いパターンである。このような例の場合、測長部位Cにはある所定の値より小さい誤差許容値を設定し、測長部位Dには測長部位Cより大きな誤差許容値を設定すると良い。このような構成によれば、まだ形成されていないパターン(上層に形成されるパターン)との関係に基づいて、適正な誤差許容値を設定することができる。
【0079】
以上のようにデザインデータによって得られる素子の情報に基づいて、誤差許容値に変化を付けることによって、測長精度の向上と測長効率の向上の両立を実現することができる。また、実施例3にて説明したような『半導体素子の特性に大きく影響を与える部分』と『それ以外の部分』、或いは『他のパターンとの接合部分(或いは接合予定部分)』と『それ以外の部分』との間で、誤差許容値に変化をつけるようにしても良い。
【実施例5】
【0080】
次に、半導体ウェハの上層と、その下層のEPE測長結果を複合処理する例について説明する。デザインデータは、パターンにとって理想的な形状であり、半導体製造工程では、その形状を極力デザインデータに近づけるように、製造装置などのコンディションが調整される。しかしながら、実際に形成されるパターンは光学式露光装置の露光位置ずれ,露光装置のレンズヒーティング等の装置条件の変化、或いはデザインデータがその形状を再現するのに適切ではない、等の事情により、形状がデザインデータから大きく変化することがある。
【0081】
このような変化の要因をいち早く究明し、製造条件等にフィードバックすることが、半導体素子の開発時間やコストの低減に繋がる。
【0082】
そのために、本例ではまず半導体ウェハの層間の接続を行うコンタクトホールによって接続されるSEMエッジ間の距離や重なり面積を、各レイヤーのEPE測長結果から求める例について説明する。
【0083】
図11は、上層,下層、及び上層と下層を接続するためのコンタクトホールの関係を概念的に説明するための図である。
【0084】
図25のフローチャートにて説明するように、まず下層配線のデザインデータ85と、下層配線のSEMエッジ86間のEPE測長を行い、EPE1を計算する(S0001)。本例の場合、x方向とy方向について、EPE測長を行い、EPE1x,EPE1yを計算する。以下のEPE測長でも同様である。
【0085】
同様にして、コンタクトホールのデザインデータ87と、SEMエッジ88間についてEPE測長を行い、EPE2を計算し(S0002)、上層配線のデザインデータ89と、SEMエッジ90間についてEPE測長を行い、EPE3を計算する(S0003)。
【0086】
次に上層,コンタクトホール、及び下層間の重なり(オーバーレイ)精度を測定するために、下層配線のSEMエッジ86とコンタクトホールのSEMエッジ88間の測長値
(overlay 1〜2)、及びコンタクトホールのSEMエッジ90と、上層配線のSEMエッジ90間の測長値(overlay 2〜3)を求める(S0004)。
【0087】
overlay1〜2とoverlay2〜3は、上層と下層のSEMエッジの相対関係が1枚の画像から判断できる場合に、その画像を用いて測定される。しかしながら測定対象の下層のエッジが判らない場合には、近接したパターンで上層下層の相対関係が判るものを利用して、実質的にoverlayを計測するようにしても良い。
【0088】
以上のようにして測定された測長値に基づいて、(式1),(式2)の計算を行う
(S0005)。
【0089】
X:EPE1x+overlay1〜2x+EPE2x+overlay2〜3x+EPE3x
≦Thx (式1)
Y:EPE1y+overlay1〜2y+EPE2y+overlay2〜3y+EPE3y
≦Thy (式2)
以上のような評価を行うことによって、コンタクトホールによって接続される上層のパターンと下層のパターン間の重ね合わせ精度の評価が可能となる。ThxとThyはx方向とy方向のずれの許容値に基づいて決定される閾値であり、所望の半導体性能を発揮するのに必要なオーバーレイの程度によって、決定されるべきものである。
【実施例6】
【0090】
次に、EPE測長結果を用いて、光学式露光装置(ステッパ)によって形成されたパターンを評価する評価方法、及び装置について説明する。
【0091】
図12(a)は複数のコンタクトホールが形成される領域について、デザインデータ
91にSEMエッジ92を重ねた例を示す図である。図12(b)はその拡大図である。本例においては9個のコンタクトホールを含む視野で取得されたSEM画像(1枚)と、デザインデータとの間で、EPE測長を行う例について説明するが、これに限られることはなく、例えば、1つのコンタクトホールを含む画像を、異なるコンタクトホールごとに複数枚取得して、それぞれのデザインデータと比較するようにしても良い。
【0092】
以下に、複数のパターンのEPE測長を行うことによって、半導体ウェハにパターンを転写する光投影露光装置(ステッパ)の露光精度を評価する例について説明する。
【0093】
図12に示すように、所定の領域単位でEPE測長を行った場合、ホールパターンの
EPE測長結果に、或る傾向が現れる場合がある。図12の例の場合、周辺部のホールが全体的に中心にシフトして形成されている。例えばステッパの1ショット内でこのような傾向を示す場合、ステッパのレンズに不具合があり、投射倍率に誤差があることが考えられる。また、1ショット内の複数のパターンについて、EPE測長を行うことによって、デザインデータ自体に問題があるのか、露光条件に問題があるのかを判定することができる。
【0094】
更に、図24に示すように、EPE測長結果を所定の領域単位でマップ状に表示することによって、例えばショット単位でのSEMエッジのずれの傾向を目視で確認することが可能となる。所定領域単位で、パターンがどの方向に、どの程度ずれたかを表示している。そのために、所定領域241ごとにEPE測長を実行し、パターンのずれを測定している。より具体的にはSEMエッジと、デザインデータ間のEPE測長を全方位について行うことによって、デザインデータと、デザインデータから最も離間したSEMエッジ間の距離に基づいて、SEMエッジのずれ方向とずれ量を検出する。
【0095】
本例の場合、EPE1−{(デザインデータの対角線の距離−SEMエッジの直径)/2}を演算することによって、デザインデータに対するSEMエッジの縮小量分の寸法変化分を除外した真のずれ量を求め、当該ずれ量のうち、最も大きな値を示す方向をずれの方向と定義した。なお、ずれの方向が特定できるのであれば、他の手法を用いても構わない。
【0096】
更に、本例ではデザインデータを基準に、EPE測長の方向を設定する例について説明しているが、これに限られることはなく、SEMエッジベースで、EPE測長の方向を決定するようにしても良い。
【0097】
このずれ量に比例する長さの矢印を、各所定領域241内に表示する。所定領域241内に複数のEPE測長結果がある場合は、その平均値を矢印として表示しても良いし、或る特定のパターンのEPE測長結果に基づいて求められる値を矢印として表示するようにしても良い。
【0098】
図24の領域242は、EPE測長が行われていない領域であり、このように識別表示することによって、測長実施の有無を判断することが容易になる。
【0099】
また、所定値以上のずれを示す領域241を選択的に表示、或いはそれ以外の領域を識別して表示することによって、ずれ量が過大な部分を抽出して表示することができるため、デバイス上の所定領域(例えばウェハ全体)内の面内傾向を目視で確認することが可能となる。
【0100】
更に、SEMエッジ92について、全方向EPE測長を行い、図28(a)に示すように、三次元的に表示するようにしても良い。本例の場合、図28(a)の縦軸は、EPE測長結果を示すものであり、横軸はEPE測長個所、或いは方向を示すものである。
【0101】
また、図28(b)に示すように、全方向EPE測長結果を、三次元的にウェハマップ状に表示することによって、各チップ、或いは各ショット内の平均的なずれを視覚的に判断することが可能となる。なお各チップ,ショットのウェハ表面方向のずれを表現できるのであれば、図28に示すような形態に限られず、種々の表示形態を選択することが可能である。
【0102】
また、上述のように、単にEPE測長結果をウェハマップ状に表示するようにしても良いし、パターンの縮小分を除外したずれ成分、或いはパターンのずれ分を除外したパターンの縮小分を表示するようにしても良い。このように表示することによって、操作者は、デザインデータに対するSEMエッジの変化要因ごとにEPE測長結果を評価することが可能になる。
【実施例7】
【0103】
次にターゲットレイヤーと、その他のレイヤーの二次元方向(X,Y方向)のEPE測長結果を計算することによって、レイヤー間の重なり精度を計測する例を、図面を用いて説明する。
【0104】
図13は、2つのパターンが積層された半導体素子のデザインデータと、SEMエッジを重ねた例を示す図である。本例の場合、デザインデータにおける2つのパターンの重ね合わせ領域の大きさと、SEMエッジにおける2つのパターンの重ね合わせ領域の大きさの比率をレイヤー間の重なり精度と定義して説明する。即ち、図13の領域a1(X1×Y1)と領域b1の比率が1対1の場合は、重ね合わせ精度が最高であるとの前提のもと、その精度を評価する。
【0105】
図14は、重ね合わせ精度を検出するステップを表すフローチャートである。先ず、第1の層のSEMエッジをSEM画像から抽出する(S0001)。次に第1の層についてEPE測長を行う(S0002)。本例の場合、X方向とY方向についてそれぞれEPE1,EPE4の測長を行う。次に第2の層のSEMエッジを抽出する(S0003)。そして、第2の層についてEPE測長を行う(S0004)。第2の層についても、第1の層と同様に、X方向とY方向のそれぞれについてEPE2,EPE3の測長を行う。
【0106】
本例の場合、SEMエッジの重ね合わせ部分が四角であるとの前提のもとに、SEMエッジ間の重ね合わせ領域b1を、b1=(X1−EPE1−EPE3)×(Y1−EPE2−EPE4)にて計算する。X1,Y1はデザインデータに基づいて導き出すことができる。そして、重ね合わせの程度を算出すべく、b1/a1を計算する(a1=X1×Y1)(S0005)。以上によって、デザインデータによって定義されている理想的なパターンの重ね合わせに対し、実パターンがどの程度の精度で重ね合わせられているか、客観的な評価を行うための値を求めることが可能となる。
【0107】
なお、第1層について、レイアウトデータとSEMエッジのマッチングを行った上で、第1層を基準とした第2層の重ね合わせ精度を求めることによって、第1層を基準とした第2層の重ね合わせの程度を求めることができる。更に、第1層と第2層を合わせた形でマッチングをすれば、第1と第2の層の相対的な重ね合わせの程度を求めることができる。また上述したb1/a1に替えて、a1/b1を演算することで、重ね合わせ誤差の程度を計算するようにしても良い。
【0108】
上述した例によれば、2つの面積の比を求めることで、重ね合わせの程度、或いは重ね合わせ誤差を求める例について説明したが、これに限られることはなく、例えばX又はY方向の一方向の重ね合わせ程度、或いはずれ(誤差)の程度を求めるようにしても良い。
【実施例8】
【0109】
図15は、光学式半導体露光装置(ステッパー)によって露光され、パターンが形成されたチップの一例を示す図である。チップは、主として半導体パターンが形成されるコアエリア151と、チップ毎に分割する際の切りしろとなるスクライブエリア152に大別される。本例では、スクライブエリア152に、アライメントマーク153を設け、当該アライメントマーク内に設けられたオーバーレイ測定用マークの重ね合わせ精度を測定することによって、コアエリア内のEPE測長を高精度に実施する例を説明する。
【0110】
図26はオーバーレイ精度計測に基づく、EPE測長の測定工程の一例を示すフローチャートである。まず、オーバーレイ精度を測定する。本例では、図15に示すように、半導体素子の下層と上層とのオーバーレイ精度を測定するために、上層に下層まで通ずる開口154が設けられており、更に下層には、上層との相対関係が特定できるようなパターン155が設けられている。本例ではパターン155の理想的な形成位置156より、
Δx,Δy分ずれて、上層が形成された例について説明する。
【0111】
なお、パターン形状は任意のもので良く、上下層の相対距離が特定できるものであれば、その形状は問わない。ステップ0001では、走査電子顕微鏡によって、パターンの理想的な形成位置156と実際に形成されたパターン155との相対関係を測定することによって、下層に対する上層のずれを検出する。
【0112】
本説明は、理想的な形成位置156が、開口154の中心位置に存在する例を説明するものである。即ち、理想的には検出された開口154のSEMエッジから(xd,yd)分、離間してパターンが形成される例を説明する。デザインデータには開口154とパターンの理想的な形成位置156との関係が予め登録されている。
【0113】
ステップ0002では、ステップxxにて検出された上層と下層間のずれ(Δx,Δy)分、ずらした状態で、コアエリア151内のSEMエッジと、デザインデータを重ねる処理を行う。この場合、上記(Δx,Δy)分、所定の位置からデザインデータをずらした状態で、デザインデータを重ねるようにする。
【0114】
ステップ0003では、デザインデータが重ねあわされたSEM画像上のパターンエッジと、当該エッジに相当するデザインデータの線分間について、EPE測長を行う。
【0115】
このようにして得られるEPE測長結果は、露光位置が適正な位置にある場合のパターン位置と、実際のパターン位置との違いを示している。操作者は、露光位置ずれがあったとしても、そのずれがない状態における露光状態を把握することができるため、例えば、露光位置ずれを含む複数の露光精度低下要因があったとしても、その低下要因ごとの判別が可能となり、適正な露光条件を早期に見出すことが可能となる。
【0116】
より具体的には、コアエリア151内の複数のパターンについてEPE測長を行った場合、パターンによって、EPE測長結果に違いが生ずる場合がある。この場合、ショット単位での露光位置ずれと、他の要因に基づくパターン位置ずれが含まれていることも考えられ、単にEPE測長を行っても、位置ずれ要因を具体的に把握できないことがある。
【0117】
本例のように、ショット単位の露光位置ずれを補正した状態で、EPE測長を行うことで、露光位置ずれ以外の要因を具体的に把握することが容易になる。
【0118】
なお、本例では検出されたずれ量を補正して、デザインデータとSEMエッジを重ねる例を説明したが、これに限られることはなく、補正することなく重ねたデザインデータとSEMエッジとの間でEPE測長を行い、その後、(Δx,Δy)を差し引くようにしても良い。
【0119】
また、アライメントマーク153のずれ評価に加え、他のアライメントマーク157の上層と下層間のずれを評価することによって、露光領域全体の回転成分を特定することができるので、露光位置のずれをx,y、及びR方向に評価することが可能となる。
【0120】
また、スクライブエリア152に設けられたアライメントマーク153の下層に対するずれは、露光装置の1ショットの全体的な露光位置ずれを示すものである。このずれ(或いは下層と上層の一致の程度)と、コアエリア151内の平均的なEPE測長結果を比較することによって、アライメントマークの信頼性判断や、キャリブレーションを行うことができる。より具体的には、オーバーレイマークのずれ(下層に対する上層のずれ)と、コアエリア内の複数のパターンのEPE測長結果の平均値の差、或いは比率を計算し、その値を評価することによって、上記目的が達成される。
【実施例9】
【0121】
図16は、上層部に形成されたパターン(上層パターンのSEMエッジ161)と、下層部に形成されたパターン(下層パターンのSEMエッジ162)間のオーバーレイ精度を計測する例を説明する図である。本例では、デザインデータに対するSEMエッジのずれ、及びデザインデータに対するSEMエッジの縮小量に基づいて変化するオーバーレイ精度を計測するのに好適な手法について説明する。下層パターンのデザインデータ164と、上層パターンのデザインデータ163に対し、上層パターンのSEMエッジ162と、上層パターンのSEMエッジ161が図16のように形成された例を用いて説明する。デザインデータに対するSEMエッジのずれは、図示しないアライメントパターンを基準として、デザインデータとSEM画像を重ねた場合に検出されるものとして説明するが、これに限られることはない。
【0122】
重ね合わせされたデザインデータとSEMエッジに基づいて、上層パターンと下層パターンが重なった部分の測定を行う。具体的には下層配線のデザインデータ164とSEMエッジ162間のEPE測長を行い、パターンの線方向から垂直な方向へのずれEPE3とEPE4を測定する。同様にして上層配線について、EPE1とEPE2を計測する。
【0123】
以上のようにして測定されたEPE1〜EPE4に基づいて、以下(式3),(式4)の演算を実行する。
【0124】
Xm=overlay(x)−(EPE1+EPE2) (式3)
Ym=overlay(y)−{(EPE3−ΔY0)+EPE4} (式4)
overlay(x)、及びoverlay(y)は、デザインデータ上において、2つのパターンが重なった部分のx方向、及びy方向の寸法を示すものであり、ΔY0は、デザインデータ上でもともと設定されていた、デザインデータ163とデザインデータ164間のずれの寸法である。
【0125】
XmとYmを乗算することにより、SEMエッジの重なり部分の面積を求めることができ、当該演算された面積を、デザインデータ上の重なり部分の面積(overlay(x)×
overlay(y))と比較することによって、理想値に対する実際のオーバーレイ領域の評価を行うことができる。
【実施例10】
【0126】
実施例9では、上層パターンのSEMエッジ161と、下層パターンのSEMエッジ
162が1枚のSEM画像上で確認できることを前提に説明したが、下層パターンと上層パターンとの間に、絶縁層などが形成され、上層パターンと下層パターンとの相対関係が、1枚のSEM画像では判断できない場合がある。本例ではこのような場合においても、上層パターンと下層パターン間のオーバーレイ精度を測定するのに好適な例について、図27のフローチャートを用いて説明する。
【0127】
まず、下層パターンのSEMエッジ162を取得し、そのデータを記憶する(S0001)。上層パターンの形成工程後に、上層パターンのSEMエッジ161を取得する(S0002)。次に、図示しないアライメントマークに基づいて、下層パターンのSEMエッジ162と、下層パターンのデザインデータ164との重ね合わせを行う。この際、下層に形成されているアライメントマークを、デザインデータとSEM画像との間で一致させるようにして、重ね合わせを行う(S0003)。このとき、SEMエッジ取得時に測定されたアライメントマークとパターンとの距離と、デザインデータに予め登録されているアライメントマークと測定対象パターンの距離に基づいて、重ね合わせを行うようにする。
【0128】
次に、下層パターンのSEMエッジ162を基準として、SEMエッジとデザインデータとのパターンマッチングを行う(S0004)。この際に得られるマッチングシフト量(ΔXl,ΔYl)を記憶する。次に、パターンマッチングが行われた下層パターンの
SEMエッジ162と、下層パターンのデザインデータ166との間でEPE測長を行い、EPEylr,EPEyllを測定する(S0005)。
【0129】
次に、図示しないオーバレイマークを用いて測定された上層パターンと下層パターンのずれ(Δxu,Δyu)分、もとのデザインデータ位置163から、ずらした位置に上層パターンのデザインデータ165を重ね合わせる(S0006)。なお、本例では(Δxu,Δyu)に、アライメントマークを基準としたデザインデータとSEMエッジ間のずれが含まれているものとして説明する。
【0130】
次に、上層パターンのデザインデータ165を基準として、上層パターンのデザインデータ165と、上層パターンのSEMエッジ161との間でパターンマッチングを行う
(S0007)。先に説明した(Δxu,Δyu)は、下層パターンと上層パターンの相対距離と、上層パターンのSEMエッジとデザインデータの相対距離が含まれているため、両者のパターンマッチングを行うことによって、実質的に下層配線と上層配線の重なりを再現した合成像を形成することが可能となる。
【0131】
次に、上層パターンのデザインデータ161と上層パターンのSEMエッジとの間で
EPE測長を行い、EPExul,EPExurを測定する(S0008)。以上の測定値に基づいて、下層配線と上層配線のオーバレイを以下のように計算する(S0009)。
【0132】
Xo=overlay(x)−{(ΔXu+EPExul)+ΔXu+EPExur} (式5)
Yo=overlay(y)−{(ΔYl+EPEyll−Yo)+(Δyl+EPEylr)} (式6)
(Xo×Yo)は実際のオーバーレイ面積を示すものであり、これをデザインデータ上のオーバーレイ面積(overlay(x)×overlay(y))と比較することにより、オーバーレイ精度を評価することが可能となる。
【0133】
以上のような演算を行うことによって、下層配線と上層配線が1枚のSEM画像に現れていない場合であっても、両者の相対関係を評価することが可能となる。
【実施例11】
【0134】
図17は、図8の中で、アクティブエリア80,絶縁体で形成されたステップ171、及びゲートパターン81が重なる部分の拡大図である。ステップ171は、半導体製造工程において、半導体素子上にアクティブエリア80を形成した後に、絶縁層を形成し、その後、CMP(Chemical Mechanical Polishing) 装置等によって、不要な部分を除去することによって形成される。
【0135】
アクティブエリア80は、周囲部と比較して低い位置に形成されているため、アクティブエリア80の縁部に形成された絶縁体は、CMP装置によって削り取られることなく、アクティブエリア80とその他の領域間の絶縁を確保するためのステップ171として形成される。
【0136】
しかしながら、CMPによる研磨条件や、絶縁体材料の種類が適性に選択されていないと、ステップを削りすぎてしまい、アクティブエリア80とゲートパターン81によって形成されるトランジスタの特性を変化させてしまうことがある。ステップ171が適正に形成されているかどうかは、例えば走査電子顕微鏡によって形成される二次元画像では、その確認が困難であるという問題がある。
【0137】
本例では、このような問題を解決するために、ステップ171とゲートパターン81が重なる部分について測長を行うことを提案する。特に、ステップが必要以上に減少していると図17に図示するように、ゲートパターン81の一部が突き出したような形状となる。このようなゲートパターンの突き出し部分を測長するということは、突き出し部分が形成される原因となったステップ81の三次元的な形状を評価することと同義となる。よって、本例によれば走査電子顕微鏡によって得られる情報に基づいて、試料の深さ方向の評価を行うことができ、さらにはCMP研磨の適正条件や、絶縁体材料の適正な種類を容易に見出すことが可能となる。
【0138】
以下に、ゲートパターンのデザインデータ172と、ゲートパターンの突出部との間の距離を、EPE測長を行う例について説明する。ボックスカーソル173は、ゲートパターンのデザインデータ172と、アクティブエリアのデザインデータ176が交差する点に位置の近傍であって、ステップ171上に位置するように配置される。次に、ボックスカーソル173内において、ゲートパターン81と、ゲートパターンのデザインデータ
172の間のEPE測長を行う。ゲートパターン81の突き出し部分177の長さが判るように、1箇所以上の測長点について、測長が行われる。
【0139】
なお、本例では、突き出し部分177先端と、ゲートパターンのデザインデータ172との間の距離を測長することで、結果として突き出し部分177の長さを評価しているが、これに限られることなく、例えば、ゲートパターン81の他の測長個所に割り当てられたボックスカーソル178内の測長個所175の測長値から、ボックスカーソル173内の測長個所179の測長値を減算して、突き出し部分177の測長値を求めるようにしても良い。
【0140】
このようにして測定された測長値は、ステップ部分の測長値として、例えば他のゲートパターンの測長個所175とは分類して記憶される。操作者はこのようにして測定された測長結果に基づいて、CMP研磨条件や、絶縁体材料の種類の評価を行うことができる。突き出し部分177が大きすぎると、半導体プロセス上、重大な問題があることが考えられるため、突き出し部分177のEPE測長結果が、所定の閾値を超えた場合に、その旨を操作者に通知するためのエラー信号を発生するようにしても良い。
【0141】
また、突き出し部分177が大きかったとしても、ゲートパターンの他の測長個所175も同様に大きければ、それはCMPの研磨条件等の問題ではない可能性が高い。よって、突き出し部177の測長結果と共に、ゲートパターンの他の測長個所175の測長を行い、両者の比率が所定の大きさを超えた場合と、所定の大きさ未満の場合とで、操作者に対するメッセージを変化させるようにしても良い。
【0142】
更に、半導体ウェハの1チップ単位、或いは所定の領域単位の測長結果をウェハマップ状に表示することによって、突き出し部xxが形成される理由をより明確に特定することが可能となる。
【0143】
例えば、ウェハ全体に亘って突き出し部が大きく形成されるような場合には、CMPによる研磨が過剰な場合や、絶縁材料の組成に問題がある場合がある。また、ウェハの一部領域に偏って、大きな突き出し部177が形成される場合は、ウェハの反りや、CMPに用いられる研磨用パッドが偏って磨耗していたりすることが考えられる。また、同心円状に同じような測長結果が検出される場合も、研磨用パッド自体に問題があることが考えられる。
【0144】
また、ウェハマップを形成する場合には、1チップ毎、或いは所定の領域単位毎に、1の測長結果、又は2以上の測長結果の平均値を、所定の範囲の測長結果ごとに識別表示すると、視覚的にウェハ全体の傾向を判断することができる。
【実施例12】
【0145】
図18は、アクティブエリア181上に、ゲートパターン182を重ねることによって、形成されるトランジスタを、評価するのに好適な手法を説明するための図である。本例では特に実際に形成されたトランジスタ領域184(SEMエッジによって特定されるトランジスタ領域)と、アクティブエリアのデザインデータ183上の理想的なトランジスタ形状を比較することによって、トランジスタの評価を行う例について説明する。
【0146】
まず、走査電子顕微鏡像を形成し、その中からSEMエッジのアクティブエリア181と、SEMエッジのゲートパターン182が重なる領域を、実トランジスタ領域183として抽出する。次に、アクティブエリアのデザインデータ185と、アクティブエリアのSEMエッジ181との間でパターンマッチングを行い、両者の位置合わせを行う。
【0147】
位置合わせを行った状態において、アクティブエリアのデザインデータ185と、ゲートパターンのSEMエッジ182が重なる領域は、アクティブエリアがデザインデータ通り適正に形成されている場合に、形成されるデザインデータ上のトランジスタ領域183である。EPE測長、或いは画像処理等によって、デザインデータ上のトランジスタ領域のX,Y方向の長さ、或いは面積を測定し、その結果に基づいて、実画像上のトランジスタ領域184と、デザインデータ上のトランジスタ領域183との比較を行う。当該比較によって、デザインデータ上の理想的なトランジスタに対する、実際のトランジスタの性能を評価することができ、結果として、半導体プロセスの評価が可能となる。
【0148】
トランジスタの評価は、トランジスタの一方向の長さや面積等の差分,比率等、両者の相対的な評価ができるものであれば、その種類は問わない。
【0149】
図19は、アクティブエリアのデザインデータ191と、アクティブエリアのSEMエッジ192とのマッチングを行い、その上でデザインデータ上のゲートパターン193と、SEMエッジのゲートパターンとの間のEPE測長を行う例について説明する図である。
【0150】
両アクティブエリア間のマッチングを行った上で、測定されるEPE測長結果(EPEu,EPElow,EPEr,EPEl)は、アクティブエリアとゲートパターンの理想的な相対位置関係から、どれだけずれて両パターンが形成されているかを示すものであり、このようなステップを経てEPE測長を行うことによって、パターン全体の位置ずれに左右されることのないトランジスタの性能評価を行うことができる。
【0151】
図20は、アクティブエリアとゲートパターンについて、別々にマッチングを行い、その際のシフト量に基づいて、両者の重なりの程度(オーバーレイ精度)を測定する例を説明するための図である。アクティブエリアのマッチングシフト量は(ΔXact,ΔYact)であり、ゲートパターンのマッチングシフト量は(ΔXgate,ΔYgate)である。この両シフト量の差(ΔXact−ΔXgate ,ΔYact−ΔYgate)がオーバーレイ精度を示す指標となる。両者のシフト量差がない状態とは、少なくともゲートパターンとアクティブエリアの相対関係が、デザインデータと一致する状態である。本例によれば、2つのシフト量の差異を評価することによって、形成されたパターン自体の位置ずれに左右されることなく、正確にオーバーレイ精度を測定することが可能となる。
【図面の簡単な説明】
【0152】
【図1】走査形電子顕微鏡の概略を説明する図。
【図2】デザインデータと電子顕微鏡画像を重ねた状態を示す図。
【図3】図2のアウターコーナー周辺の拡大図。
【図4】パターンについて全方位測長を行った結果をグラフとして表した図。
【図5】EPE測長の一例を説明するフローチャートである。
【図6】所定値を越えたEPE測長結果を選択的にサンプリングする例を説明するフローチャートである。
【図7】全方位のEPE測長結果を表形式で表示する例を説明する図。
【図8】複数のパターンが積層形成され半導体素子を構成するパターンについてEPE測長を行う例を説明する図。
【図9】EPE測長結果の分類を説明するフローチャートである。
【図10】デザインデータを基準として、EPE測長方向を決定する例を説明する図。
【図11】上層,下層、及び上層と下層を接続するためのコンタクトホール間でEPE測長を行う例を説明する図。
【図12】複数のコンタクトホールが形成される領域について、デザインデータと SEMエッジを重ねる例を説明する図。
【図13】2つのパターンが積層された半導体素子のデザインデータと、SEMエッジを重ねた例を示す図。
【図14】重ね合わせ精度を検出するステップを示すフローチャート。
【図15】光学式半導体露光装置によって露光され、パターンが形成されたチップの一例を示す図。
【図16】上層部に形成されたパターンと、下層部に形成されたパターン間のオーバーレイ精度を計測する例を説明する図。
【図17】アクティブエリア,絶縁体で形成されたステップ、及びゲートパターンが重なる部分の拡大図。
【図18】アクティブエリア上に、ゲートパターンを重ねることによって、形成されるトランジスタを、評価するのに好適な手法を説明するための図。
【図19】デザインデータ上のゲートパターンと、SEMエッジのゲートパターンとの間のEPE測長を行う例を説明する図。
【図20】アクティブエリアとゲートパターン間のオーバーレイ精度を測定する例を説明する図。
【図21】2つのパターンが隣接する場合のEPE測長結果の分類手法を説明する図。
【図22】EPE測長結果の表示例を説明するための図。
【図23】デザインデータに対し、SEMエッジがずれている例を説明する図。
【図24】EPE測長結果を所定の領域単位でマップ状に表示する例を説明する図。
【図25】オーバーレイ精度を評価するステップを説明するフローチャート。
【図26】EPE測長の測定工程の一例を示すフローチャート。
【図27】オーバーレイ精度を評価するステップを説明するフローチャート。
【図28】EPE測長結果を三次元的に表示する例を説明する図。
【符号の説明】
【0153】
1…陰極、2…第一陽極、3…第二陽極、4…一次電子線、5,6…収束レンズ、7…対物レンズ、8…絞り板、9…走査コイル、10…試料、11…直交電磁界発生装置、
12…二次信号、13…二次信号検出器、14…信号増幅器、15…ステージ。
【特許請求の範囲】
【請求項1】
半導体集積回路の検査対象パターンの設計データと、当該検査対象パターンの画像データを重ね、設計データのパターンエッジと、画像データのパターンエッジ間の距離を測長するパターンの測長方法において、
前記パターンの測長結果を、他のパターンと重畳することで半導体素子を構成する部分の測長結果と、それ以外の測長結果で分類し、
当該分類された測長結果群ごとに、当該測長結果を評価することを特徴とするパターンの測長方法。
【請求項2】
請求項1において、
前記分類された測長結果群ごとに、前記測長結果の統計処理を行うことを特徴とするパターンの測長方法。
【請求項3】
請求項1において、
前記分類された測長結果群ごとに、前記測長結果の誤差許容値を決定することを特徴とするパターンの測長方法。
【請求項4】
半導体集積回路の検査対象パターンの設計データと、当該検査対象パターンの画像データの比較を行い、設計データのパターンエッジと、画像データのパターンエッジ間の距離を測長するパターンの測長方法において、
複数の層が積層された半導体集積回路内の1つの層のパターンと、他の層のパターンとの相対距離を測長し、
前記他のパターンの種類に応じて、前記相対距離の測長結果を分類し、
当該分類された測長結果群ごとに、当該測長結果を評価することを特徴とするパターンの測長方法。
【請求項5】
請求項4において、
前記測長結果群ごとに、前記測長結果の統計処理を行うことを特徴とするパターンの測長方法。
【請求項6】
請求項4において、
前記分類された測長結果群ごとに、前記測長結果の誤差許容値を決定することを特徴とするパターンの測長方法。
【請求項7】
走査電子顕微鏡によって取得された画像から抽出されるパターンのエッジと、当該パターンの設計データとの間の距離を測定するコンピュータを制御するためのコンピュータープログラムにおいて、以下のシーケンスを実行するようにプログラムされたコンピュータープログラム、
前記パターンを含む領域の画像を検出するステップ、
前記パターンのエッジと、当該パターンの設計データとの間の複数の測長個所を測長するステップ、及び
前記複数個所の測長結果を、パターンの部位の種類ごとに分類するステップ。
【請求項8】
請求項7において、
前記分類は、パターンの屈曲部と、直線部の間で行われることを特徴とするコンピュータープログラム。
【請求項9】
請求項7において、
前記分類は、近接補正効果パターンが形成される部位と、それ以外の部位との間で行われることを特徴とするコンピュータープログラム。
【請求項10】
請求項7において、
前記分類は、複数のパターンが重なった領域と、それ以外の領域との間で行われることを特徴とするコンピュータプログラム。
【請求項11】
請求項10において、
前記分類は、複数のパターンが重なってトランジスタ領域を形成する個所と、それ以外の個所との間で行われることを特徴とするコンピュータープログラム。
【請求項1】
半導体集積回路の検査対象パターンの設計データと、当該検査対象パターンの画像データを重ね、設計データのパターンエッジと、画像データのパターンエッジ間の距離を測長するパターンの測長方法において、
前記パターンの測長結果を、他のパターンと重畳することで半導体素子を構成する部分の測長結果と、それ以外の測長結果で分類し、
当該分類された測長結果群ごとに、当該測長結果を評価することを特徴とするパターンの測長方法。
【請求項2】
請求項1において、
前記分類された測長結果群ごとに、前記測長結果の統計処理を行うことを特徴とするパターンの測長方法。
【請求項3】
請求項1において、
前記分類された測長結果群ごとに、前記測長結果の誤差許容値を決定することを特徴とするパターンの測長方法。
【請求項4】
半導体集積回路の検査対象パターンの設計データと、当該検査対象パターンの画像データの比較を行い、設計データのパターンエッジと、画像データのパターンエッジ間の距離を測長するパターンの測長方法において、
複数の層が積層された半導体集積回路内の1つの層のパターンと、他の層のパターンとの相対距離を測長し、
前記他のパターンの種類に応じて、前記相対距離の測長結果を分類し、
当該分類された測長結果群ごとに、当該測長結果を評価することを特徴とするパターンの測長方法。
【請求項5】
請求項4において、
前記測長結果群ごとに、前記測長結果の統計処理を行うことを特徴とするパターンの測長方法。
【請求項6】
請求項4において、
前記分類された測長結果群ごとに、前記測長結果の誤差許容値を決定することを特徴とするパターンの測長方法。
【請求項7】
走査電子顕微鏡によって取得された画像から抽出されるパターンのエッジと、当該パターンの設計データとの間の距離を測定するコンピュータを制御するためのコンピュータープログラムにおいて、以下のシーケンスを実行するようにプログラムされたコンピュータープログラム、
前記パターンを含む領域の画像を検出するステップ、
前記パターンのエッジと、当該パターンの設計データとの間の複数の測長個所を測長するステップ、及び
前記複数個所の測長結果を、パターンの部位の種類ごとに分類するステップ。
【請求項8】
請求項7において、
前記分類は、パターンの屈曲部と、直線部の間で行われることを特徴とするコンピュータープログラム。
【請求項9】
請求項7において、
前記分類は、近接補正効果パターンが形成される部位と、それ以外の部位との間で行われることを特徴とするコンピュータープログラム。
【請求項10】
請求項7において、
前記分類は、複数のパターンが重なった領域と、それ以外の領域との間で行われることを特徴とするコンピュータプログラム。
【請求項11】
請求項10において、
前記分類は、複数のパターンが重なってトランジスタ領域を形成する個所と、それ以外の個所との間で行われることを特徴とするコンピュータープログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】

【図12】
【図13】
【図14】

【図15】
【図16】

【図17】

【図18】

【図19】
【図20】

【図21】
【図22】
【図23】
【図24】

【図25】

【図26】
【図27】
【図28】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2007−248087(P2007−248087A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−68480(P2006−68480)
【出願日】平成18年3月14日(2006.3.14)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月14日(2006.3.14)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]