
試料表面の配向を感知する表面配向センサを備えたミクロトーム
【課題】試料の切片を作成するためのミクロトームまたは他の組織試料裁断装置に関し、特に、いくつかの実施態様は試料表面の配向を感知する表面配向センサを備えたミクロトームまたは他の組織試料裁断装置を提供する。
【解決手段】試料裁断装置は切断機構、試料保持容器、駆動システムおよび表面配向センサを含む。試料保持容器は試料を保持するよう作動可能である。切断機構は試料から切片を切断するよう作動可能である。駆動システムは試料保持容器と結合させる。駆動システムは試料保持容器に保持された試料と切断機構間の移動を駆動するよう作動可能である。表面配向センサは試料保持容器に保持された試料の表面の配向を感知するよう作動可能である。
【解決手段】試料裁断装置は切断機構、試料保持容器、駆動システムおよび表面配向センサを含む。試料保持容器は試料を保持するよう作動可能である。切断機構は試料から切片を切断するよう作動可能である。駆動システムは試料保持容器と結合させる。駆動システムは試料保持容器に保持された試料と切断機構間の移動を駆動するよう作動可能である。表面配向センサは試料保持容器に保持された試料の表面の配向を感知するよう作動可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施態様は、試料の切片を作成するためのミクロトームまたは他の組織試料裁断装置に関し、特に、いくつかの実施態様は試料表面の配向を感知する表面配向センサを備えたミクロトームまたは他の組織試料裁断装置に関する。
【背景技術】
【0002】
組織診断とは、試験または分析に用いる組織の処理に関連する科学または専門領域である。試験または分析は、細胞形態、化学的組成、組織構造もしくは組成、あるいは他の組織特性の試験または分析と考えられる。
【0003】
組織診断では、ミクロトームまたは他の組織試料裁断装置により裁断するために組織試料を調製してもよい。一般的に、組織から大部分またはほとんど全ての水分を除去することで、例えば1種以上の脱水剤に組織をさらすことにより、組織は乾燥または脱水し得る。組織を乾燥した後、脱水剤を任意に洗浄し、その後、包埋剤(例えば可塑剤を含むワックス)を乾燥組織に導入し、浸透させてもよい。水分除去および包埋剤浸透はミクロトームで組織を薄い切片へと裁断することに役立つ可能性がある。
【0004】
その後、組織を包埋し得る。包埋実行中、乾燥させ、包埋剤を浸透させた組織をワックス、各種ポリマーまたは別の包埋媒体のブロックまたは他の塊に包埋し得る。典型的には、乾燥させてワックスを浸透させた組織を鋳型および/またはカセットに設置し、鋳型がワックスで満たされるまで溶融ワックスを組織上に分注し、その後ワックスを冷却して固めることも可能である。ワックスのブロック内に組織を包埋することにより、ミクロトームで組織を切断または裁断する際の補助的な支持体が提供され得る。
【0005】
ミクロトームは組織試料の薄片または切片を切断するために使用し得る。当技術分野では、多様な異なる種類のミクロトームが公知である。代表的な種類としては、例えば滑走式、回転式、振動式、鋸式およびレーザー式ミクロトームが挙げられる。前記ミクロトームは手動式または自動式の場合がある。自動式ミクロトームには、切片を切断する試料と、切片の切断に使用される切断機構との間の切断動作を駆動または自動操作する電動システムまたは駆動システムが挙げられる。ミクロトームを、単に組織診断だけでなく他の目的にも使用し、また、単に包埋した組織だけでなく他種の試料にも使用し得ることは高く評価するものである。
【図面の簡単な説明】
【0006】
本発明は以下の記述を参照し、本発明の実施態様を説明するために使用する図面を添付することで最も理解され得る。以下の図面を説明する:
【0007】
【図1】ミクロトームまたは他の試料裁断装置の実施態様の概略図
【図2】ミクロトームまたは他の試料裁断装置のセンサアセンブリの実施態様
【図3】(A)後退位置にあるセンサアセンブリの実施態様(B)上昇位置にあるセンサアセンブリの実施態様
【図4】(A)感知プレートの第1軸を有するセンサアセンブリの実施態様の斜視図の切り取り図(B)切断線B’‐Bに沿った図4Aのセンサアセンブリの実施態様の断面図(C)第2軸支持部材を中心にした回転の第2軸と共に感知フレームを備えるセンサアセンブリの実施態様の斜視図の切り取り図(D)切断線D‐D’に沿った図4Cのセンサアセンブリの実施態様の断面図
【図5】ハンドホイールおよび制御装置を備えるミクロトームの操作を制御する制御システムの実施態様
【図6】ミクロトームの供給駆動システムの実施態様の斜視図
【詳細な説明】
【0008】
以下の説明では、特定のミクロトーム、特定の切断駆動システム、特定のセンサ、特定の感知メカニズム、特定の表面配向測定および/または調整プロセスなど、多数の具体的詳細が明記されている。しかし、当然のことながら、本発明の実施態様はこれらの具体的な詳細が無くとも実行し得る。その他の例では、この説明の理解が曖昧になることを避けるために、周知の機械部品、回路、構造および技術は詳細には示していない。
【0009】
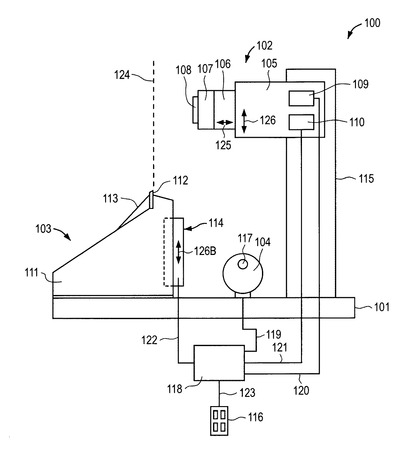
図1はミクロトームまたは他の試料裁断装置の実施態様の概略図を示している。ミクロトーム100は、供給駆動システムまたは切断駆動システム102を有する基部部材101、実装部材103およびそこに取り付けたハンドホイール104を備え得る。供給駆動システム102は支持部材115により基部部材101の上に支持し得る。供給駆動システム102は垂直駆動部材105、水平駆動部材106、および試料108を保持するよう作動可能な試料保持容器107を備え得る。試料108は、裁断される組織の一片、例えばパラフィンに包埋した組織の一片を含み得る。切断駆動システムまたは供給駆動システムは、試料保持容器に保持された試料の移動を駆動するよう作動可能である。供給駆動システム102のモータ109は垂直駆動部材105に機械的に結合し、垂直両矢印126の方向に垂直駆動部材105の垂直移動を駆動するよう作動可能である。供給駆動システム102のモータ110は水平駆動部材106と機械的に結合し、水平両矢印125の方向に水平駆動部材106の水平移動を駆動し得る。なお、「水平」、「垂直」、「最上部」、「底部」、「上部」、「下部」等の用語は本明細書では、示された装置の説明を容易にするために使用されている。水平移動を垂直移動等で置き換えることは他の装置でも可能である。
【0010】
実装部材103は、切断部材または機構112に実装表面を提供する実装基部111を備え得る。切断部材または機構112は例えば、実装部材103に実装された多種の材料から成る刃もしくはナイフ、またはミクロトームに好適な他の種類の切断機構となり得る。切片受容部材113は切断部材112の片側に沿って設置してもよい。切片受容部材113は、切断部材または刃112により試料108から切断された切片を受け入れるように寸法を合わせている。この態様では、切片受容部材113は、刃112の切断エッジから実装部材103の表面まで伸長している傾斜表面を有し得る。切断部材または刃112が試料108をスライスし、試料108から切断した切片は、試料108から分離し、切片受容部材113に沿って伸長する。
【0011】
いくつかの実施態様で示したように、ミクロトーム100は表面配向センサアセンブリ114を備え得る。表面配向センサアセンブリ114は試料108表面の配向または角度を感知または測定するよう作動可能である。試料108の表面の配向または角度は多様な方法で感知または決定し得る。いくつかの実施態様では、試料108の表面がセンサアセンブリ114と接触し、センサアセンブリ114の1つ以上の移動可能部が試料108表面の配向に合わせてあることが下記でさらに詳細に説明されている。センサアセンブリの1つ以上の移動可能部が移動すると、ミクロトーム100が試料108表面の配向を自律的に感知または決定する。光学的機構および他の感知機構もまた好適である。
【0012】
感知された配向を利用し、切断部材もしくは機構112、および/または切断部材もしくは機構112に付随する切断平刃124と平行、実質的に平行、または少なくともやや平行になるよう試料108表面を調整または配列する。有利なことには、ミクロトーム100に切断された試料切片が十分均等に切断されるように、試料108表面は切断部材112および/または切断平刃124と平行になるように良好に配列している。いくつかの実施態様では、ミクロトーム100は任意に、切断部材112および/または切断平刃124と平行、または十分に平行、または少なくともやや平行になるように試料108表面の配向を自律的に調整または配列することが可能である。ミクロトーム100は、感知した配向に基づいて切断平刃および/または切断機構に対する試料表面の配向を自律的に感知および/または調整する論理回路を有し得る。これにより有利に、配列精度が改善され、さらに/またはオペレーターが手動で調整することから解放される。あるいは、前記調整は必要に応じて手動で行い得る。裁断方法の実施態様には、センサアセンブリ114を使用して試料108表面の配向をミクロトーム100が自律的に感知すること、試料108表面の配向をオペレーターが手動で、またはミクロトーム100が自律的に調整すること、ならびにこのような調整後に試料108の切片をミクロトーム100が取り出すことが含まれ得る。
【0013】
説明した実施態様では、センサアセンブリ114は、必要が無くとも供給駆動システム102と実装部材103間の位置で実装基部111と可動に結合する。実装基部111はセンサアセンブリ114に支持表面を提供し、垂直両矢印126Bの方向にセンサアセンブリ114が垂直にスライド移動するように寸法を合わせ、連結している。操作中、センサアセンブリ114は実装基部111に沿って、供給駆動システム102に向かって垂直方向に上方へスライド移動するよう作動可能であり、垂直駆動部材105は、供給駆動システム102がセンサアセンブリ114に向かって垂直方向に下降して移動するよう作動可能である。試料108をセンサアセンブリ114と十分垂直に配列すると、水平駆動部材106は、供給駆動システム102が水平矢印125の方向にセンサアセンブリ114に向かう水平方向で移動するよう作動可能となり、そうすることで試料108の表面はセンサアセンブリ114に対して適切に設置され、表面配向測定が可能となる。試料108の表面の配向を測定し、妥当な場合に再配列すると、センサアセンブリ114は図に示すとおり垂直下方向に(例えば試料保持容器に保持された試料と切断機構との間の移動から遠ざかる後退位置へ)後退するよう作動可能となる。
【0014】
再度、図1を参照すると、供給駆動シテム102の操作はハンドホイール104および/または制御装置116を使用して制御し得る。ハンドホイール104は、ハンドホイール104を係止するハンドルまたは他のパルス発生装置117を備え得る。垂直駆動部材105が垂直両矢印126に示す垂直方向に移動し、試料108が容易にスライスできるようにハンドホイール104の回転が操作可能である。いくつかの実施態様では、ハンドホイール104は供給駆動システム102と機械的に結合していない分離型ハンドホイールとすることも可能である。むしろ分離型ハンドホイール104は制御ライン119を介してエンコーダ(図示せず)および制御回路118と電気的に接続してもよい。分離型ハンドホイール104が回転すると、エンコーダは電気信号を制御回路118に送達することが可能となる。制御回路118は制御ライン120を介してモータ109に接続し、エンコーダからの電気信号にしたがって垂直駆動部材105の移動を制御するよう作動可能である。制御回路118はまた、制御ライン121を介してモータ110に接続し、制御ライン122を介してセンサアセンブリ114に接続する。
【0015】
エンコーダからの信号以外に、制御装置116からの信号は制御回路118に送信され、センサアセンブリ114、ハンドホイール104、モータ109および/またはモータ110の操作を制御または促進する。いくつかの実施態様では、制御装置116は例えば、キーボード、容量センサタッチパッド、または他の使用者もしくはデータ入力装置となり得る。いくつかの実施態様では、信号は制御ライン123を介して制御装置116と制御回路118間で送信される。他の実施態様では、制御装置116は、信号を無線で制御回路118へ送信するよう作動可能な無線制御装置であり、制御ライン123は省略される。
【0016】
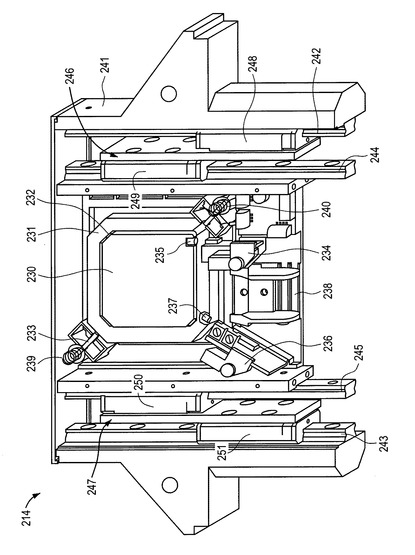
図2は表面配向センサアセンブリの実施態様を示している。図では、対象となる適切な参照番号または参照番号の末端数字が複数の図の中で反復されており、これらは一致する構成部分または同様の性質を任意に有する類似構成部分を示している。例えば、図2の表面配向センサアセンブリ214は図1のセンサアセンブリ114に類似した性質を任意に有し得る。表面配向センサアセンブリ214は切断機構および/または切断平刃との試料表面の自律的な合致を促進するために使用する。有利なことには、切片が平らに切断されるように、試料表面は切断機構(例えば刃)に十分平行に配列されている。試料を配列するために、試料はセンサアセンブリ214と接触し、センサアセンブリ214は試料表面の配向を検出する。試料表面が切断平刃と平行に、あるいは十分に平行に配列されていない例もいくつかある。センサアセンブリ214は切断平刃に対する試料表面の角度を検出する。感知した情報を利用し、試料表面が切断平刃と平行に、または少なくともやや平行になる配置になるように試料を調整してもよい。
【0017】
センサアセンブリ214に関して説明した実施態様としては感知プレート230および感知フレーム231が挙げられる。感知フレーム231は感知プレート230の周囲に設置する。感知プレート230は平面的であっても、さらに/または平滑表面を有していてもよい(例えば平面的プレート)。感知プレートの厚さは素材にもよるが数ミリ程度(例えば0.5mm〜5mm)となり得る。感知プレートと交差している範囲は約20〜60mm程度でよい。感知プレートおよび感知フレームは例えばアルミニウム、ステンレススチール、他の金属、剛性プラスチックおよび保護コーティングで任意に被覆したそれらの組み合わせなどの多様な素材から成り得る。図では、感知プレート230および感知フレーム231は、長さや幅寸法に関して実質的に正方形であり、前記感知プレートのコーナーは面取りされており、前記感知フレームのフレームコーナー部はそれに合わせてあるが、代替的実施態様では、それらは事実上、正方形、あるいは長方形、円形、楕円形、八角形、六角形またはその他の形状であってもよい。1つの特定の例示的な実施態様では、感知プレートは寸法約39.5mm×39.5mmの正方形であり、保護コーティング(例えばポリテトラフルオロエチレン(PTFE)コーティング)を有するアルミニウムで構成され、感知フレームは約90mm×75mm×厚さ25mmであり、金属(例えばアルミニウム)および/またはプラスチックから成る。あるいは、感知プレートおよび感知フレームはその他の寸法でもよく、素材も他のもの(例えばステンレススチール、他の金属または各種プラスチック)でもよい。感知プレート230は第1軸支持部材232を中心に回転する第1感知部材であり、感知フレーム231は第2軸支持部材233を中心に回転する第2感知部材である。第1軸支持部材232は感知プレート230を対角線上に横断する。第2軸支持部材233は感知フレーム231を対角線上に横断する。第1軸支持部材232は第2軸支持部材233に実質的に垂直である(例えば80〜100度)。したがって、感知プレート230は感知フレーム231の回転軸に直角あるいは垂直な軸に沿って回転可能である。試料が感知プレート230の方へと押されると、感知プレート230および感知フレーム231は水平方向に移動可能にもなる。水平方向移動により、試料表面の水平配置に関する情報(すなわち図示したページ面の内側位置および外側位置)が得られる。この態様では、切断平刃に対する試料表面の角度方向ならびに試料表面の水平配置の両方が感知アセンブリ214に検出されることが可能である。
【0018】
センサアセンブリ214はさらに感知プレートセンサ234および感知プレート信号出力部材235を備える。感知プレート234を感知アセンブリフレーム238に取り付け、一方、感知プレート信号出力部材235を感知プレート230に取り付ける。図のように、1つの態様では、感知プレート信号出力部材235は、コーナーにある、もしくはコーナーに最も近い感知プレート230に取り付けるか、または感知プレート230の回転軸から最も離れた他の場所に取り付けてもよい。感知プレートセンサ234は、感知プレート信号出力部材235からの信号を受信するように感知プレート信号出力部材235と十分に合わせる。受信した信号は感知プレート230の回転または変位の程度の指標となる。例示により、第1軸支持部材232に沿った感知プレート230の回転角度(α)、典型的には数度程度(例えば0〜10°)の角度が、感知プレート信号出力部材235の移動角度およびそれに対応する感知プレート信号出力部材235から受信する信号強度に基づいて感知プレートセンサ234により検出し得る。いくつかの実施態様では、感知プレート信号出力部材235がマグネットを含んでもよい。この実施態様では、感知プレートセンサ234はマグネット235の磁場を感知し(例えば磁気抵抗性感知機構)、感知プレート230の配置を検出するよう作動可能である。あるいは、磁気を利用する代わりに、他の感知機構が使用され、例えば機械的センサ(例えば歪み計)、電気センサ(例えば静電容量を利用する)、光学的センサ、または他のセンサを任意に使用してもよい。
【0019】
センサアセンブリ214はまた、感知フレームセンサ236および感知フレーム信号出力部材237も備える。感知フレームセンサ236は感知アセンブリフレーム238に取り付け、一方、感知フレーム信号出力部材237は感知フレーム231に取り付ける。図のように、1つの態様では、感知フレーム信号出力部材237は、コーナーにある、もしくはコーナーに最も近い所にある感知フレーム231に取り付けるか、または感知フレーム231の回転軸から最も離れた他の場所に取り付けてもよい。感知フレームセンサ236は、感知フレーム信号出力部材237からの信号を受信できるように感知フレーム信号出力部材237と十分に合わせる。1つの例では、感知フレーム信号出力部材237はマグネットを有し、感知フレームセンサ236は磁場または感知フレーム信号出力部材237からの信号を検出し、典型的には数度程度(例えば0〜10°)の感知フレーム231の回転角度(β)を検出し得る。あるいは、磁気を利用する代わりに、他の感知機構を使用し得る。前述のとおり、感知フレーム231の第2軸支持部材233は、感知プレート230の第1軸支持部材232に対して実質的に直角である。したがって、第2軸支持部材233に関わる切断平刃に対する試料表面の角度が感知フレームセンサ236によりさらに検出可能となる。
【0020】
感知プレートセンサ234および感知フレームセンサ236に検出された第1軸支持部材232を中心にした感知プレート230の回転角度(α)および第2軸支持部材233を中心にした感知フレーム231の回転角度(β)はそれぞれ順に、センサアセンブリ214に接触している試料表面の最初の配向を反映している。試料表面が切断平刃に平行ではない、あるいはあまり平行ではないことを感知プレートセンサ234および感知フレームセンサ236が検出すると、センサアセンブリ214からミクロトーム100の制御部品(例えば制御回路118および/または制御装置116)へと信号が送られ得る。感知プレート230および感知フレーム231の回転から判定して、信号は切断表面が切断平刃から逸れた程度または範囲を示し得る。制御部品により自律的に、または使用者の決定の下で、供給駆動システムは試料表面の配向を最初の配向から、試料の切断表面が切断平刃と平行になるよう変えた配向へと修正し得る。
【0021】
1つの実施態様では、感知プレート230および感知フレーム231が切断機構および/または切断平刃と平行に配列されている条件を特徴づけるために較正を行う場合もある。例えば、感知プレート230および感知フレーム231は、例えば手動で、または機械的較正部品に強制されて移動され、そうすることでそれらは切断機構および/または切断平刃と平行に配列されるようになる。感知プレートセンサ234および感知フレームセンサ236の出力はこの条件での較正データとして測定し得る。例えば、感知プレート信号出力部材235および感知フレーム信号出力部材237が磁気抵抗性感知機構を使用する場合、較正データには、個々の感知プレートセンサ234および感知フレームセンサ236が受けた磁場の磁気抵抗値または強度指標が含まれる。この較正データは機械読み取り型媒体(例えばメモリー)に保存するか、あるいはその他の方法ではミクロトームで保管してもよい。
【0022】
較正データはその後、試料表面の配向を調整するときに呼び出し、使用し得る。例えば、感知プレートおよび感知フレームとの接触を維持しながら、一般的に短時間で試料表面の配向を調整するためにミクロトームは自律的に試料保持容器を調整し得る。この過程全体において、各感知プレートセンサ234および感知フレームセンサ236によりリアルタイムセンサ測定を複数回行う。例えば、磁気抵抗感知機構の場合、試料保持容器の各調整後に順次、磁気抵抗測定を複数回行う。これらのリアルタイム測定は、感知プレート230および感知フレーム231が切断機構および/または切断平刃と平行に配置されている条件に対応する保存もしくは保管された較正データと比較することもある。試料表面の配向が切断機構および/または切断平刃とさらに平行になるように調整すれば、リアルタイム測定は較正値と近い値になる可能性がある。その時点でのセンサ出力値(例えば、磁気抵抗値)が較正センサ値と合致、または十分に合致するまで調整をさらに行ってもよい。その時点でのセンサ出力値が較正値と合致、または十分に合致したら、それは試料表面が切断機構および/または切断平刃と平行または十分に平行であるということが示唆されていると考えられる。
【0023】
感知プレート230および感知フレーム231もまた水平方向に移動可能である(すなわちこの図で図示したページ面の内側位置および外側位置)。この態様では、第1付勢部材239および第2付勢部材240は第2軸支持部材233の端部に沿って配置し、試料に向かう方向に第2軸支持部材233を付勢する。いくつかの実施態様では、第1付勢部材239および第2付勢部材240はバネとなり得る。試料表面を感知プレート230に対して押すと、感知フレーム231および第2軸支持部材233が、試料から遠ざかる水平方向に後退する。光学的センサおよび他のセンサを図4Cの実施態様と関連させて詳細に述べることとする。これらは第2軸支持部材233の端部に、または端部付近に設置し、第2軸支持部材233の移動を検出するよう作動可能となり得る。例えば、第2軸支持部材233が一対の光学的センサ間の光線を遮断すると、試料ブロックがさらに移動することはなくなる。この態様では、切断平刃に対する試料の最前面の水平配置がセンサアセンブリ214により検出され得る。(例えば第2軸支持部材233の測定した水平位置ずれに基づいた)試料最前面の測定位置以外では、切断機構または切断平刃の位置も正確に分かる。情報のこれらの断片はまとめて、ミクロトームが正確かつ既知の厚みを持つ最初の切片を作成することに利用し得る。
【0024】
いくつかの実施態様で前述したように、感知アセンブリフレーム238は必要が無くとも実装部材241にスライド可能または移動可能に取り付けられ、他の実施態様では、センサアセンブリ214が切断部材または機構の下に固定されている場合がある。感知アセンブリ214を支持するために使用する実装基部(例えば図1の実装基部111)に実装部材241を固定で取り付け得る。感知アセンブリフレーム238は実装部材241に沿って垂直方向にスライド移動し得る。この態様では、実装部材241はガイドレール242、243を備え、感知アセンブリフレーム238はガイドレール244、245を備え得る。実装部材241と感知アセンブリフレーム238との間で、スライディング部材246はガイドレール242、244とスライド可能に結合し、感知アセンブリフレーム238が実装部材241に対してスライド移動できるようになる。スライディング部材246は、スライディング部材246の各反対側から伸長してスライディング部材246をそれぞれ第1ガイドレール242および第2ガイドレール244に結合させる第1ガイド部材248および第2ガイド部材249を備える。同様に、感知アセンブリフレーム238の反対側と実装部材241との間で、スライディング部材247はガイドレール243、245とスライド可能に結合している。スライディング部材247は、スライディング部材247の各反対側から伸長してスライディング部材247をそれぞれ第1ガイドレール245および第2ガイドレール243に結合させる第1ガイド部材250および第2ガイド部材251を備える。いくつかの実施態様では、ガイド部材248、249の1つは対応するガイドレールに固定して取り付け、他の一方は対応するガイドレールにスライド可能に取り付け得る。同様に、ガイド部材250、251の1つは対応するガイドレールに固定して取り付け、他の一方は対応するガイドレールにスライド可能に取り付け得る。感知フレームアセンブリ238の各側にある少なくとも1つのガイド部材が実装部材241とスライド可能に結合できることから、感知アセンブリフレーム238は実装部材241に対してスライド移動することが可能である。操作中、感知アセンブリフレーム238は試料保持容器に保持した試料に接触できる位置に上がるまで、ガイドレール242、243に沿ってスライド移動し得る。試料に接触した後、感知アセンブリフレーム238は実装基部の切断部材の下になる位置まで後退する(図1の実装基部111参照)。
【0025】
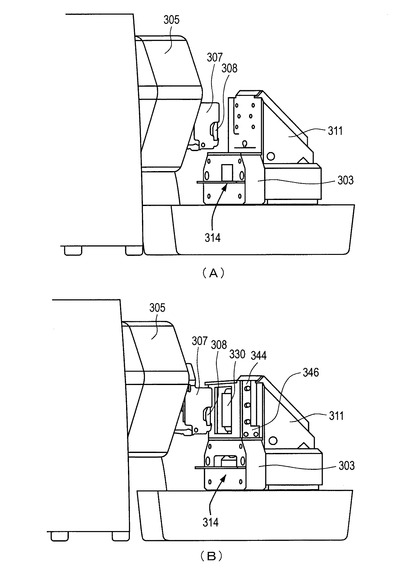
図3Aおよび図3Bはそれぞれ、後退位置および上昇位置にあるセンサアセンブリ314の実施態様を示す。図3Aは、感知プレート(図示せず)および感知フレーム(図示せず)が実装基部311の下に後退している後退位置にあるセンサアセンブリ314の実施態様を示す。図3Aに示すように、実装部材303は実装基部311の下に位置している。スライス操作中に、センサアセンブリ314は、スライス工程を妨げないように実装部材303内に後退させることが可能である。試料308が試料保持容器307に取り付けられていることが示されている。試料保持容器307は垂直駆動部材305に取り付ける。
【0026】
試料308の表面の角度配向を感知するため、感知プレート330が図3Bの実施態様に示された試料308と合うように、センサアセンブリ314を垂直に引き上げてもよい。図3Bに示すように、感知アセンブリ314のレール部材344はスライディング部材346に沿ってスライド移動し、感知プレート330を実装部材303の上方に引き上げて実装基部311の正面に配置させる。図示していないが、センサアセンブリ314の反対側に配置されたレール部材は、対応のスライディング部材に沿ってスライド移動し得る。試料308は感知プレート330に合わせ、感知プレート330へ向かう方向に水平に進ませる。その後、試料308の最前面の角度配向は感知プレート330に対して試料308の最前面を押すことで検出できる。検出された角度配向は、切断部材および/または切断平刃と平行、十分に平行、または少なくともやや平行になるように試料308最前面の角度配向の再配列を容易に行うために使用し得る。必要であれば、再配列過程全体にわたって異なる時点で、または繰り返してこのような感知測定を複数回行うことも可能であり、あるいは、1回の測定とその1回の測定に基づく1回の調製を行うことも可能である。裁断操作に向けてミクロトームを準備するために、図3Aに示すようにセンサアセンブリ314を実装基部311の下方へ下げることも可能である。
【0027】
再度、図1を参照し、この示された実施態様に注目すると、センサアセンブリ114は支持部材115と切断部材112および/または切断平刃124との間で水平に配置されている。図示のとおり、センサアセンブリ114は垂直に上下移動するよう作動可能である。支持部材115と切断部材112との間のセンサアセンブリ114の水平配置に関する1つの態様として、試料108は水平矢印125の方向で、切断部材112および/または切断平刃124に到達するまでに長めの水平距離を横断する必要がある。この理由は部分的に、3cm程度の超過した水平距離がセンサアセンブリ114の幅寸法、例えば図1に示す寸法「W」と合致しているためである。その長めの水平距離の横断は余計な時間がかかり、実装方式に依存的で望ましいものではないと思われる。例えば一般的に、水平方向移動は比較的、垂直方向移動より緩慢である。このことは、水平配置を正確にして裁断の厚さを正確に制御するために、水平方向移動の鋭敏な精度を要求する結果であると考えられる。
【0028】
センサアセンブリ114が試料108および/または支持部材115と切断機構112との間に水平に配置されていない代替的実施態様を考えてみる。例えば、いくつかの実施態様では、センサアセンブリ114は切断部材または機構112および/または切断平刃124の下にほぼ垂直に固定して配置し得る。切断部材112の下に垂直にセンサアセンブリ114を配置する1つの潜在的利点は、試料108が矢印125の水平方向で、切断部材112および/または切断平刃124に到達するまでに余計な距離(例えば3cm程度)を横断する必要がないことである。このことは、試料が切断部材112へと水平移動する時間を短縮することに役立つ。いくつかの実施態様では、垂直駆動部材105の垂直移動は水平駆動部材106の水平移動より比較的速いと思われる。垂直駆動部材105は、センサアセンブリ114に伸びる垂直矢印126の方向で余計な距離(例えば64cm)を下降する可能性がある。いくつかの例では、水平駆動部材106がセンサアセンブリ114の幅に起因して水平方向の余計な距離を移動する時間より、垂直駆動部材105が切断機構112の下でセンサアセンブリ114に伸びる垂直方向での余計な距離を移動する時間の方が短いと思われる。このことは表面配向を感知し、表面配向を調整する時間の短縮に役立つと思われる。
【0029】
前述したように、試料を感知プレートに向けて押すことにより試料の最前面の開始位置が検出され得る。それぞれの軸を中心にした感知プレートおよび感知フレームの回転度に基づいて、試料の表面の角度配向および位置が測定可能となる。数個の軸およびそれらの軸を中心にした感知プレートおよび感知フレームの回転を図4A、4B、4Cおよび4Dの実施態様に示す。
【0030】
図4Aは感知プレートの第1軸を有するセンサアセンブリ414の実施態様の斜視図の切り取り図を示す。図4Bは切断線B’‐Bに沿った図4Aのセンサアセンブリ414の実施態様の断面図を示す。この態様では、センサアセンブリ414は感知アセンブリフレーム438に取り付けた感知プレート430および感知フレーム431を備える。第1軸支持部材432は感知プレート430の対角線上に位置し、回転角度(α)で感知プレート430に回転の第1軸を付与する。第2軸支持部材433(図4D参照)は感知フレーム431の対角線上に位置し、感知フレーム431に回転の第2軸を付与する。回転の第2軸は回転の第1軸に実質的に垂直である(例えば80〜100度)。
【0031】
操作中、試料ブロック408(例えば、パラフィンブロックまたはカセットに包埋した組織試料)の最前面または切断表面を感知プレート430に向けて押す。試料ブロック408の表面は切断部材および/または切断平刃に平行ではない例もある。感知プレート430に向けて試料ブロック408の表面を押すと、図4Bに示すように第1軸支持部材432に沿って感知プレート430が回転し、それにより感知プレート430が試料ブロック408表面の角度配向と一致するようになる。第1軸支持部材432に沿う感知プレート430の回転度は感知アセンブリフレーム438に取り付けられた感知プレートセンサ430に検出される。その後この情報は試料ブロック408表面の角度配向を決定するために一部を使用する。
【0032】
感知プレート430の回転に加えて、試料ブロック408の表面に角度を付けると、図4Cおよび4Dに示すように第2軸支持部材432に沿って感知フレーム431が回転する。図4Cは、第2軸支持部材433を中心にした回転の第2軸と共に感知フレーム431を備えるセンサアセンブリ414の実施態様の斜視図の切り取り図を示す。感知フレーム431は角度(β)で回転の第2軸を中心にして回転し得る。図4Dは切断線D‐D’に沿って図4Cのセンサアセンブリ414の実施態様の断面図を示す。前述したように、第2軸支持部材433は感知フレーム431の対角線上に位置し、第1軸支持部材432に実質的に垂直である(例えば80〜100度)。このように、第2軸支持部材433に対して試料ブロック408の表面に角度を付けると、図4Dの実施態様に示すように、感知フレーム431は第2軸支持部材433を中心にして回転することとなる。回転度は感知アセンブリフレーム438に取り付けた感知フレームセンサ436に検出され得る。この情報は感知プレート430の回転度に関する情報と組み合わせ、試料ブロック408の最前面または切断表面の角度配向を決定し得る。
【0033】
感知フレーム431を水平方向に(例えば図1の水平両矢印125の方向)移動させる第1付勢部材439および第2付勢部材440を図4Cでさらに説明する。第1付勢部材439および第2付勢部材440を第2軸支持部材433の各反対側端部に沿って配置し、第2軸支持部材433を試料ブロック408に向けて水平方向に付勢することも可能である。いくつかの実施態様では、第1付勢部材439および第2付勢部材440はバネ、空気圧シリンタ゛ー等であってよい。試料ブロック408を感知プレート430に向けて押すと、第2軸支持部材433が第1付勢部材439および第2付勢部材部材440に押し付けられ、感知プレート430および感知フレーム431が試料ブロック408から遠ざかって水平方向に(例えば図1の水平両矢印125の方向)後退する。いくつかの実施態様では、この方向の移動の程度は例えば、第2軸支持部材433の各端部に設置された光学センサ、機械的センサ、磁場センサ等の光学的センサを使用して任意に検出し得る。光学センサにより、試料ブロック408から遠ざかる第2軸支持部材433の水平方向移動の程度が検出し得る。この水平方向変位の情報は感知プレート430および感知フレーム431の回転量に関する情報と併用し、試料ブロック408の最前面の角度配向のみならず試料ブロック408の最前面の水平位置をも決定し得る。有利なことには、試料ブロック408最前面の水平位置を把握していれば、目的の厚さに切断することに都合が良い。
【0034】
特定の構想をさらに説明するために、試料ブロック408の最前面の角度配向および試料ブロック408の最前面の水平位置の両方が決定し得る特定の非限定的実施態様を考慮されたし。この例示的実施態様では、感知プレート430および感知フレーム431は、その個々の軸に沿って、(例えば)約5度以下の試料ブロック408表面の(切断平刃に対する)角度を個々に検出し得る。特に、感知プレート430は切断平刃に平行な初期位置から約5度(5°)以下で傾いて、第1軸支持部材432を中心に回転し得る。同様に、感知フレーム431は切断平刃に平行な初期位置から約5度(5°)以下で傾いて、第2軸支持部材433を中心に回転し得る。感知プレート430に向けて試料ブロック408の表面を押すと、感知プレート430および/または感知フレーム431は、試料ブロック408の表面が切断平刃から逸れる程度と同等の角度まで回転し得る。感知プレート430および感知フレーム431は約7度(7°)以下の接触角度を検出し、この特定の実施態様では、試料ブロック408の表面が切断平刃から逸れる全体的な角度配向を決定し得る。
【0035】
角度配向が決定されると、ミクロトームは自律的に調整を決定し、決定した調整によって試料ブロック408の表面の角度配向を自律的に調整し、そうすることで表面は切断部材および/または切断平刃に対して平行、実質的に平行またはやや平行になる。例えば、試料ブロック408の表面が全角度約4度(4°)で切断平刃から逸れていると、試料ブロック408の表面はその後、切断平刃にほぼ平行になるように反対側の方向へ約4度(4°)回転し得る。必要に応じて、微調整で角度を徐々に小さくしながら感知測定を複数回行ってもよい。当然のことながら、この例示的実施態様で記述した特定の回転角度より大きい、または小さい回転角度のいずれかを他の実施態様でも利用し得る。また、試料ブロック408を感知プレート430に向けて押すと感知フレーム431の水平移動を感知するセンサを使用して、試料ブロック408の最前面の水平位置を検出してもよい。試料ブロック408の最前面の水平位置を把握していれば、ミクロトームは望ましい厚さで初めの切断を行い得る。
【0036】
図2、図3A〜3Bならびに図4A、4B、4Cおよび4Dに示すセンサアセンブリ214、314および414はそれぞれ、好適な表面配向センサの例示的な実施態様である。しかし、他の表面配向センサも検討してみる。これらの代替的表面配向センサのいくつかは、上述したセンサアセンブリ214、314および414と同様に、接触に基づくセンサまたはセンサアセンブリである。しかしそれらは試料表面の配向の感知に、異なる接触型感知機構を利用することが可能である。例えば、1つの代替的実施態様では、感知フレームの使用よりむしろ、感知プレートを単一ピボット(例えばボールジョイント)に実装してもよく、これにより感知プレートが試料の切断表面の配向に一致するように二次元回転するようになる。さらに他に検討した表面配向センサとしては、試料表面の配向を決定するために試料表面に接触する必要のない非接触型センサがある。例えば1つの実施態様では、例えば1つ以上のレーザービームを表面に向けて走査することにより光学感知システムが試料表面の配向を光学的に感知し得る。他のアプローチでは音響効果、干渉分光法等に基づくものもある。
【0037】
切断部材および/または切断平刃と平行またはやや平行になるように試料表面の配向を再配列することが可能な試料保持容器が当技術分野で公知である。いくつかの実施態様では、切断部材および/または切断平刃に対して試料の切断表面の配向を二次元的に調整することが可能な多軸ワークピースチャックまたは電動チャックが供給駆動部材に備えられてもよい。好適な多軸ワークピースチャックの例としては「MULTI-AXIS WORKPIECE CHUCK」という標題で2004年1月22日にXuan S. Buiらに出願された米国特許第7,168,694号に記述があり、本出願の承継人に譲渡している。1つの実施態様では、多軸チャックは、前記チャックに対して実質的に固定した配向で試料などのワークピースを保持する実装アセンブリを有してもよい。チャックはモータ駆動であり、垂直な少なくとも2つの軸を中心に回転し得る。チャックはオペレーターが1つ以上のモータと連通しているコントローラを使用して手動で回転させるか、あるいはミクロトームが自律的にチャックを回転させてもよい。チャックの位置を感知するために1つ以上のセンサを使用してもよい。1つの実施態様にしたがって、各軸はチャックの中間の基準位置および端部位置を検出する3つのセンサを有し得る。モータに信号を送り、チャックを回転させることにより、使用者またはミクロトームはチャックの望ましい位置への移動を制御し得る。所望の位置へ到達したかを判断するためにセンサを使用してもよい。1つの実施態様では、チャックは少なくとも2つの直角に交わる軸を中心に回転可能な第1および第2部分を有してもよい。第1部分は第2部分と無関係に、第1軸を中心に回転し得る。第2軸を中心に第2部分が回転すると、第1部分も第2軸を中心に回転し得る。このことによりチャックは多次元に回転し得る。
【0038】
いくつかの実施態様では、係止機構も任意に備え得る。多軸チャックが回転した後に、係止機構は所望の位置に多軸チャックを係止し得る。この係止機構は例えば、第1、第2および第3部分を摩擦または他の公知の方式で係止する永久マグネットソレノイド、歯車付モータまたは回転ハンドルとすることができる。1つの実施態様では、チャックが調整されていない時点でチャックを締め付けるためにモータを使用してもよい。チャックを調整することによってミクロトームが試料の位置の調整を決定すると、またはチャックを調整することによって使用者が組織試料の位置の手動調整を決定すると、チャックを緩めてチャックが調整されるようにモータには信号が送られる。他の場合では、チャックの位置を調整しない場合、チャックを締め付けられた形態または緩められた形態で維持するようモータに信号が送られ、そうすることでチャックの位置および/またはチャックに保持された試料の位置は不用意に変化しない。
【0039】
いくつかの実施態様では、裁断のサイクルは以下の工程を含み得る:(1)切断平刃に向かって前進する水平方向に、望ましいスライス厚に合わせた所定の距離で試料ブロック408を移動させる工程;(2)切断部材に向かって垂直方向(例えば下方)に試料ブロック408を移動し、薄片を得る工程;(3)切断平刃および/または切断部材から遠ざかる後方または反対側へ水平方向に、所定の距離で試料ブロック408を移動させる工程;および(4)切断部材から遠ざかる反対側の垂直方向に(例えば上方)試料ブロック408を移動させる工程。切断部材から遠ざかる反対側の垂直方向(例えば上方)に試料ブロック408を移動させる工程(4)の実行中、切断部材から遠ざかる後方側へ水平方向に試料ブロック408を後退または移動させると、試料ブロック408と切断部材との接触が回避しやすくなる。典型的には、試料ブロック408が後退する距離はスライスした試料の厚さと等しいと言える。あるいは、いくつかの実施態様では、後退の工程は省略できるものと考えられている。スライスのサイクルは、目的の薄片数が得られるまで反復し得る。
【0040】
いくつかの実施態様では、ミクロトームは裁断サイクルの異なる段階で供給駆動システムおよび/または試料(例えば図4Aの試料ブロック410または図1の試料108)の移動に異なる速度を使用することが可能である。例えばいくつかの実施態様では、裁断サイクルの1つ以上の非裁断過程の間(例えば試料の切断または裁断が行われていない間)、供給駆動システムおよび/または試料の移動速度を比較的高めることが可能であり、それに対して裁断サイクルの裁断過程の間(例えば試料の切断または裁断が行われている間)、供給駆動システムおよび/または試料の移動速度を比較的低下させることが可能である。試料の切断または裁断中に供給駆動システムおよび/または試料の移動速度を比較的低下させると、切片の質が高まり、さらに/あるいは切片がより均等になる傾向にあり、それに対して、裁断サイクルの1工程以上の非裁断過程を速めると、裁断サイクルの全体的な速度の改善が促され、所与の時間内により多くの切片が作成される。このように、供給駆動システムおよび/または試料の移動速度は裁断サイクル全体にわたって可変である。例えば、薄片を得るために切断部材に向かう垂直方向(例えば下方に)の試料ブロック410または試料108の移動(例えば上記段落の操作(2))が裁断サイクルの1工程以上の他の工程(例えば上記段落の操作(1)、(3)、(4)またはそれらの組み合わせ)より速度低下するように、使用者は裁断サイクルを制御またはプログラミングし得る。
【0041】
いくつかの実施態様では、ミクロトームは、裁断サイクルの設定可能またはプログラミング可能な裁断工程を特定する論理回路を有し、そこでは供給駆動システムおよび/または試料の移動は比較的低速にしてある。例えばいくつかの実施態様では、ミクロトームは、設定可能またはプログラミング可能な裁断長を設定またはプログラミングする論理回路を有し得る。例示により、前記長さは、異なる寸法を有する異なる種類のカセットに対応する複数の所定の長さから選択し得る。異なる種類のカセットは、裁断を行う裁断長が異なっている。1つの例として、カリフォルニア州TorranceのSakura Finetek USA Inc.から市販されている7019 Paraform(登録商標)銘柄のBiopsy 13 mm x 13 mm Cassetteおよび7020 Paraform(登録商標)銘柄のBiopsy 26 mm x 19 mm Cassetteが異なる裁断長を有する。1つの例示的な実施態様では、ミクロトームは、オペレーターが裁断長を特定または指示することができるよう作動可能とし得る。裁断長の特定または指示は異なる方法、例えば長さを特定する方法、複数の所定の長さから1つの長さを選択する方法、カセットの種類を特定する方法、複数の異なる種類のカセットから1つの種類のカセットを選択する方法等により実行し得る。例えば、使用者が特定の種類のカセットから切片を作成する準備が整っている時点で、使用者は制御装置(例えば図1の制御装置116)を使用して特定の種類のカセットを選択することが可能であるし、ミクロトームは特定の種類のカセットに対応する所定の裁断長ですでに予めプログラミングされている場合もある。裁断中、ミクロトームでは、供給駆動システムおよび/または試料が指定の裁断長を移動するときの速度を比較的低速にし、裁断サイクルの1工程以上または実質的にすべての他の工程では移動速度を比較的高速にしてもよい。例えば、指定の裁断長での試料切断の開始時または直前、および終了時または直後に、速度を比較的高速にしてもよい。
【0042】
いくつかの実施態様では、ミクロトームは、試料(例えば図1の試料108または図4Aの試料ブロック408)の所与の、または所定の部分を初めに自律的に切り出す論理回路を有し得る。例えばその部分は、切片を得るべき実際の組織素材を覆い隠しているパラフィン、包埋素材、カセット素材または他の非組織素材(例えば組織素材の切断表面と感知プレートに接触する試料の最前外表面との間に配置している)の所与の、または所定の厚さを有し得る。例として、試料はカセット底部に設置した組織片およびカセットおよび包埋素材のブロックに包埋した組織試料を含み得る。カリフォルニア州TorranceのSakura Finetek USA Inc.製の各種カセットの例では、カセットはパラフィンと類似した裁断特性を有するParaform(登録商標)銘柄のカセット素材を含み、カセット底部のParaform(登録商標)銘柄のカセット素材を経て裁断を行ってもよい。
【0043】
いくつかの実施態様ではミクロトームは、試料の所与の、または所定の部分、例えば裁断したい実際の組織素材を覆い隠しているパラフィン、包埋素材、カセット素材または他の非組織素材の一部を初めに自律的に切り出す論理回路を有し得る。例えば、ミクロトームは試料の実際の組織素材を露出するために、またはそれと接触するためにカセット底部を自律的に切り出し得る。典型的には、特定のカセットの例では、カセット底部を形成する素材の厚さおよび切片の厚さにより、ミクロトームは複数の(例えば約2〜約20個、多くの場合、約5〜約15個)切片を自律的に形成し、所定の厚さのカセット底部を切り出し得る。カセット底部の厚さはミクロトームにより認識するか、あるいは規定のものであってもよい。例えば、使用者が直接に厚さを特定するか、あるいは、プログラミングまたはその他の方法で知り得たカセット底部の厚さをそれぞれが有する数個の異なる種類から1種類のカセットを選択してもよい。いくつかの例では、例えば制御装置上の使用者入力装置(例えばトリムボタン)により、あるいはその他ではトリム操作を選択して、オペレーターは自動的処理を行うためにミクロトームを制御し得る。有利なことには、ミクロトームにより試料部分(例えばカセット底部)を自律的に切り出すと、オペレーターはそのように処理する義務から解放され得ることになり、さらに/あるいは試料部分(例えばカセット底部)の切り出しの速度が高まりやすくなる。その後、試料の実際の組織が露呈するとすぐに、組織の薄片または切片を得る裁断サイクルが開始し得る(例えば、オペレーターが裁断ボタンを押すか、あるいはその他の方法ではミクロトームがその時点で露呈した組織試料の切断表面から切片を取り出してもよい)。
【0044】
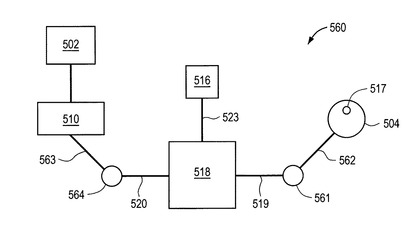
前述したように、スライス操作は自動的に、あるいはシステムと相互に作用させた使用者の手動により進行し得る。図5はハンドホイールおよび制御装置を含むミクロトームの操作を制御するための制御システムの実施態様を説明している。制御システム560はハンドホイール504および制御装置516を備え得る。ハンドホイール504はハンドホイール504を係止するためのハンドルまたは他のパルス形成装置517を備え得る。いくつかの実施態様では、非機械的結合または非機械的機構(例えば電気的結合)を利用してハンドホイール504をモータ510に結合する。典型的には、ミクロトームはモータに機械的に結合したハンドホイールを備える。しかしこのような機械的結合は、使用者がハンドホイールを回転させようとするとハンドホイールに抵抗性が掛かる。このようなハンドホイールの反復回転は使用者に負担がかかり、時には手根管症候群などの医学的症状の原因となる可能性がある。本明細書で開示した非機械的結合または機構は、ハンドホイールの抵抗性を低減する利点をもたらし、ハンドホイールの回転が容易になる可能性がある。
【0045】
いくつかの実施態様では、非機械的結合または機構は第1エンコーダ561を備える。第1エンコーダ561はハンドホイール504のシャフト562に結合した回転エンコーダとなり得る。ハンドホイール504、次にシャフト562を回転させると、第1エンコーダ561にハンドホイール504の角度位置が提供される。その後、第1エンコーダ561は前期角度位置を電気的表示(例えばアナログまたはデジタルコードまたは数値)に変換する。このアナログまたはデジタルコードは制御ライン519を介して制御回路518に送信され、ここで処理され、モータ510、次に供給駆動部502の移動を方向付けるために利用される。いくつかの実施態様では、供給駆動部502と結合しているモータ510は、第2エンコーダ564により制御回路518と接続し得る。この態様では、切断操作中、第2エンコーダ564がモータ510の位置を検出できるように、モータ506のシャフト563は第2エンコーダ564に接続してもよい。その後、エンコーダ564はこの位置情報を電気的表示(例えばアナログまたはデジタルコードまたは数値)に変換し、この電気的表示を制御ライン520を介して制御回路518に送信する。いくつかの実施態様では、制御回路518は少なくとも部分的にハンドホイールの角度位置の電気的表示に基づいてモータを制御し得る。例えば、ハンドホイール504およびモータ510の位置は両方とも既知であることから、切断操作中、ハンドホイール504の位置がモータ510の位置に対応し、それと合致することが制御回路518により確実となり得る。例えば、個々の第1および第2エンコーダから得た信号を比較して、ハンドホイール504の位置がモータ510の駆動シャフトの位置と合致していることが示されるまで、ハンドホイール504の回転がモータ510を移動させることはない。このことは、特に裁断の自動モードから裁断の手動モードへと切り替える場合に、ミクロトーム操作の安全性が高まる傾向にある。
【0046】
制御装置516はさらに自動切断操作を開始するよう操作可能である。制御装置516は切断操作の開始に適した入力装置であればどのような種類でもよい。典型的には、制御装置516には例えば、キーボード、キーパッド、容量センサタッチパッドまたは他の使用者データ入力装置が挙げられる。いくつかの実施態様では、信号は制御ライン523を介して、制御装置516と制御回路518との間で送信される。他の実施態様では、制御装置516は、無線制御信号を制御回路518に送信し、制御回路518から無線信号を任意に受信するよう作動可能な無線制御装置となり得る。制御ライン523は省略してもよい。無線制御装置516は無線送信機、無線レシーバーおよび/または無線トランシーバー、無線プロトコルスタックおよび無線装置に見られるようなその他の一般的な部品を有し得る。1つの態様では、無線制御装置516はブルートゥース対応装置となり得るが必須ではない。
【0047】
制御装置516はミクロトームの動作を制御するために使用可能なキーまたは擬似キーを備え得る。典型的には、ミクロトームの垂直もしくは水平移動に対応する矢印など、ミクロトームの多様な操作に対応する図記号もしくは文字列、および/または、例えばスライス、停止、開始、カセット底部のトリム、裁断、係止もしくは他のミクロトーム操作に対応する他の用語、記号、図柄等をキーにより表してもよい。使用者は制御装置516を使用して実行すべき操作を選択し、適当なキー(単数または複数)を押し、所望の操作を開始する。制御信号は制御装置516から制御回路518へ送信される。その後、制御回路518は切断操作を開始するために例えばモータ510に信号を送る。その後、使用者が停止キーを押すか、あるいはプログラミングされた切断操作が完了するまで、実質的に使用者がさらに介入することもなく切断操作は自動的または自律的に継続し得る。
【0048】
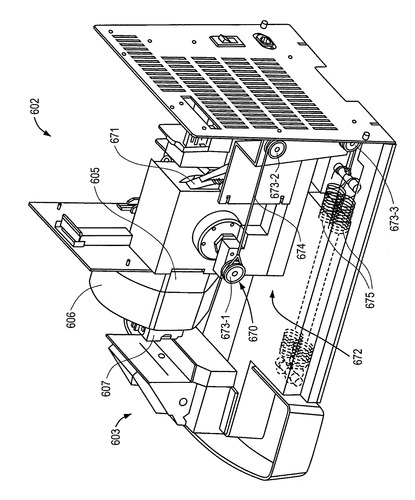
図6はミクロトームの供給駆動システムの実施態様の斜視図を示す。1つの実施態様では、供給駆動システム602は図1を参照して説明した供給駆動システム102に使用し得る。あるいは、供給駆動システム102は供給駆動システム602とは全体的に異なる供給駆動システムを使用してもよい。供給駆動システム602は垂直駆動部材605、水平駆動部材606および試料保持容器607を含む。切断部材を保持する実装部材603はさらに、試料保持容器607の正面に設置し得る。1つの実施態様では、実装部材603は図1を参照して説明した実装部材103と実質的に類似していると言える。
【0049】
操作中、垂直駆動部材605のスライダ(図示せず)を垂直にトラックに沿って移動させることによって供給駆動システム602を垂直に移動させる。回転プレート(図示せず)に取り付けられてベルト671およびモータ(図示せず)を駆動させて回転するピン(図示せず)を回転させることによりスライダは移動する。モータにかかる負荷を軽減するために、供給駆動システム602の重量を平衡錘でバランス調整する場合もある。例えば1つの実施態様では、平衡錘の代わりにバネアセンブリ672を用いて重量をバランス調整する場合もある。平衡錘が過重傾向になるとミクロトームの重量も費用も増加してしまう傾向にある。あるいは、平衡錘は必要に応じて使用してもよい。バネアセンブリ672は滑車673‐1、673‐2、673‐3を含み得る。滑車673‐1はピン670に取り付けてもよい。ケーブル674は滑車673‐1の一端に取り付け、滑車673‐2および673‐3の周囲に伸長し、バネ675の反対側の端部に取り付けてもよい。この態様では、供給駆動システム602が垂直に移動するとバネ675はケーブル674に対するバランス調整力を示し、次いでピン670を引き出し、供給駆動システム602の重量に対抗する。バネアセンブリ672は平衡錘を省略してシステムの重量を軽減し、モータにかかる慣性負荷を軽減することに役立つ可能性がある。バネアセンブリ672を1つの実施態様で説明しているが、他の実施態様では、供給駆動システム602を平衡錘でバランス調整するためにピン670に取り付けた半円の重い塊を使用し得ることもさらに考えられる。また、半円の重い塊は供給駆動システム602を平衡錘としてバランス調整することには効果的であるが、モータにかかる慣性負荷を増加させる傾向にある。
【0050】
いくつかの実施態様では、ミクロトームは供給駆動システム(例えば図1の供給駆動システム104または図6の供給駆動システム602)を垂直位置に係止するよう作動可能な輪止めを任意に含み得る。1例として、輪止めにはバネ付勢式ディスクブレーキが挙げられる。バネ付勢式ディスクブレーキは、ディスクブレーキ、ピンまたは他の係止部材、および意図した解除信号が付与されない場合にピンまたは他の係止部材をディスクブレーキとの係止係合部に付勢する1つ以上のバネまたは他の機械的付勢要素を含み得る。当技術分野で公知である他の種類の輪止めは例えばピン、または穴に付勢された他の係止部材なども好適である。輪止めが不用意に機能しなくなった場合、固定し、係止した垂直位置で輪止めは供給駆動システムを維持し得る。供給駆動システムの移動が必要な適当な時点で、輪止めを開けるために解除信号(例えば電気的信号)を意図的に輪止めに送ることも可能である(例えば、バネを圧縮してディスクブレーキを解除し得る)。有利なことには、このような輪止めは、例えば電源異常やその他の事象で供給駆動システムが移動または落下したことによりオペレーターが被害を被る可能性を防止、または少なくとも低減することに役立つと考えられる。このような輪止めが無い場合、供給駆動システムが不慮に落下あるいは移動すれば、オペレーターは刃または他の切断部材に損傷を受ける可能性がある。
【0051】
本明細書全体にわたる「1つの実施態様」または「1つ以上の実施態様」に対する参照は例えば、特定の特徴が本発明の実施に包含され得ることを意味していることも賞賛に値する。同様に、開示を合理化し、多様な独創的態様の理解を深める目的で、明細書中、多様な特徴を単独の実施態様、図またはそれらの説明でまとめてグループ化した場合もあることは賞賛に値する。しかし、各請求項で明確に引用したものより多くの特徴を要求する本発明の意図を反映しているとして、この開示法を解釈すべきではない。むしろ、以下の請求項が反映しているように、独創的態様は、開示した単独の実施態様の特徴すべてより少ないと言える。したがって「詳細な説明」にしたがった請求項は、各請求項が個々の実施態様として自立しながら、この「詳細な説明」に明確に本明細書によって組み込まれている。
【0052】
前述の明細書では、本発明をその特定の実施態様を参照して説明してきた。しかし、添付の請求項に記載した本発明の広範な精神および範囲から逸脱せずに、そこに多様な修正および変更を行うことが可能であるのは明らかである。したがって明細書および図面は限定的意味合いというより説明的意味合いでとらえるべきである。
【0053】
上述では、説明目的で、本発明の実施態様を完全に理解させるために多数の特定の詳細を記述している。しかしこれら特定の詳細の一部がなくとも、1つ以上の実施態様が実行可能であることは当業者にとって明白なことである。記述した特定の実施態様は本発明を限定するためではなく、説明するために提供している。本発明の範囲は上述の特定の例に決定されるものではなく、下記の請求項にのみ決定される。その他の例では、説明の理解が曖昧になることを避けるために、ブロック図形式で、あるいは詳述することなく周知の回路、構造、装置および操作を示している。
【0054】
例えば、実施態様の構成要素の寸法、形状、構造、結合、形態、機能、素材、ならびに操作、組み立ておよび使用の方式など、本明細書に開示された実施態様に修正を行うことは当業者に高く評価されるものとなろう。図に示し、明細書で説明したものと同等の関連事項すべては本発明の実施態様内に包含されている。さらに、妥当と考えられる場合に、参照番号または参照番号の末端数字が複数の図の中で反復されており、これらは一致する構成部分または同様の性質を任意に有する類似の構成部分を示している。
【0055】
多様な操作および方法が記述されている。いくつかの方法が基本的な形式で記述してあるが、任意に、操作を方法に加えても、操作を方法から省いてもよい。また、例示的な実施態様にしたがった操作の特定の順序を記述している一方で、当然のことながら、その特定の順序は例示的なものである。代替的実施態様は異なる順序での操作、特定の操作の併用、特定の操作の重複等を任意に行い得る。方法に対して多くの修正および適応を行い、検討してよい。
【0056】
1つ以上の実施態様は機械呼び出し型および/または機械読み取り型媒体を備える製品(例えばコンピュータプログラム製品)を含む。前記媒体は、機械により呼び出し可能および/または読み取り可能である形態で情報を提供する(例えば保存)機構を含み得る。機械呼び出し型および/または機械読み取り型媒体は指標配列および/またはデータ構造を提供するか、あるいは保存し、それらはもし機械で実行する場合には機械処理を誘発または開始し、さらに/あるいは本明細書に開示の操作または方法の1つ以上または一部を機械に実行させるものである。1つの実施態様では、機械読み取り型媒体には具体的な持続性の機械読み取り可能な保存媒体が挙げられる。例えば具体的な持続性の機械読み取り可能な保存媒体には、フロッピー(登録商標)、光学的保存媒体、光学的ディスク、CD‐ROM、磁気ディスク、光磁気ディスク、読み取り専用メモリ(ROM)、プログラミング可能ROM(PROM)、消去可能およびプログラミング可能ROM(EPROM)、電気的消去可能およびプログラミング可能ROM(EEPROM)、ランダムアクセスメモリ(RAM)、スタティックRAM(SRAM)、ダイナミックRAM(DRAM)、フラッシュメモリ、相変化メモリまたはこれらの組み合わせが挙げられる。具体的な媒体としては、例えば半導体材料、相変化材料、磁性材料等の1つ以上の信頼性のある、または具体的な物理的材料が挙げられる。
【0057】
「1つの実施態様」または「1つ以上の実施態様」に対する本明細書全体にわたる引例が例えば、特定の性質が本発明の実行に含まれ得ることを意味していることもまた高く評価すべきである。同様に、開示を合理化し、多様な独創的態様の理解を助ける目的で、明細書中、多様な特性が単一の実施態様、図面またはそれらの説明の中にまとまって群を形成している場合があることは高く評価すべきである。しかし開示のこの方法は、本発明が各請求項で明確に引用したものよりさらに多くの態様を必要とする意図を反映していると解釈すべきではない。むしろ、以下の請求項が反映しているように、独創的態様は開示された単一の実施態様の特徴すべてに掛かっている訳では決してない。したがって「詳細な説明」に続く請求項は本明細書によりこの「詳細な説明」に明確に組み込まれており、各請求項は本発明の別個の実施態様としてそれ自身に基づいている。
【技術分野】
【0001】
本発明の実施態様は、試料の切片を作成するためのミクロトームまたは他の組織試料裁断装置に関し、特に、いくつかの実施態様は試料表面の配向を感知する表面配向センサを備えたミクロトームまたは他の組織試料裁断装置に関する。
【背景技術】
【0002】
組織診断とは、試験または分析に用いる組織の処理に関連する科学または専門領域である。試験または分析は、細胞形態、化学的組成、組織構造もしくは組成、あるいは他の組織特性の試験または分析と考えられる。
【0003】
組織診断では、ミクロトームまたは他の組織試料裁断装置により裁断するために組織試料を調製してもよい。一般的に、組織から大部分またはほとんど全ての水分を除去することで、例えば1種以上の脱水剤に組織をさらすことにより、組織は乾燥または脱水し得る。組織を乾燥した後、脱水剤を任意に洗浄し、その後、包埋剤(例えば可塑剤を含むワックス)を乾燥組織に導入し、浸透させてもよい。水分除去および包埋剤浸透はミクロトームで組織を薄い切片へと裁断することに役立つ可能性がある。
【0004】
その後、組織を包埋し得る。包埋実行中、乾燥させ、包埋剤を浸透させた組織をワックス、各種ポリマーまたは別の包埋媒体のブロックまたは他の塊に包埋し得る。典型的には、乾燥させてワックスを浸透させた組織を鋳型および/またはカセットに設置し、鋳型がワックスで満たされるまで溶融ワックスを組織上に分注し、その後ワックスを冷却して固めることも可能である。ワックスのブロック内に組織を包埋することにより、ミクロトームで組織を切断または裁断する際の補助的な支持体が提供され得る。
【0005】
ミクロトームは組織試料の薄片または切片を切断するために使用し得る。当技術分野では、多様な異なる種類のミクロトームが公知である。代表的な種類としては、例えば滑走式、回転式、振動式、鋸式およびレーザー式ミクロトームが挙げられる。前記ミクロトームは手動式または自動式の場合がある。自動式ミクロトームには、切片を切断する試料と、切片の切断に使用される切断機構との間の切断動作を駆動または自動操作する電動システムまたは駆動システムが挙げられる。ミクロトームを、単に組織診断だけでなく他の目的にも使用し、また、単に包埋した組織だけでなく他種の試料にも使用し得ることは高く評価するものである。
【図面の簡単な説明】
【0006】
本発明は以下の記述を参照し、本発明の実施態様を説明するために使用する図面を添付することで最も理解され得る。以下の図面を説明する:
【0007】
【図1】ミクロトームまたは他の試料裁断装置の実施態様の概略図
【図2】ミクロトームまたは他の試料裁断装置のセンサアセンブリの実施態様
【図3】(A)後退位置にあるセンサアセンブリの実施態様(B)上昇位置にあるセンサアセンブリの実施態様
【図4】(A)感知プレートの第1軸を有するセンサアセンブリの実施態様の斜視図の切り取り図(B)切断線B’‐Bに沿った図4Aのセンサアセンブリの実施態様の断面図(C)第2軸支持部材を中心にした回転の第2軸と共に感知フレームを備えるセンサアセンブリの実施態様の斜視図の切り取り図(D)切断線D‐D’に沿った図4Cのセンサアセンブリの実施態様の断面図
【図5】ハンドホイールおよび制御装置を備えるミクロトームの操作を制御する制御システムの実施態様
【図6】ミクロトームの供給駆動システムの実施態様の斜視図
【詳細な説明】
【0008】
以下の説明では、特定のミクロトーム、特定の切断駆動システム、特定のセンサ、特定の感知メカニズム、特定の表面配向測定および/または調整プロセスなど、多数の具体的詳細が明記されている。しかし、当然のことながら、本発明の実施態様はこれらの具体的な詳細が無くとも実行し得る。その他の例では、この説明の理解が曖昧になることを避けるために、周知の機械部品、回路、構造および技術は詳細には示していない。
【0009】
図1はミクロトームまたは他の試料裁断装置の実施態様の概略図を示している。ミクロトーム100は、供給駆動システムまたは切断駆動システム102を有する基部部材101、実装部材103およびそこに取り付けたハンドホイール104を備え得る。供給駆動システム102は支持部材115により基部部材101の上に支持し得る。供給駆動システム102は垂直駆動部材105、水平駆動部材106、および試料108を保持するよう作動可能な試料保持容器107を備え得る。試料108は、裁断される組織の一片、例えばパラフィンに包埋した組織の一片を含み得る。切断駆動システムまたは供給駆動システムは、試料保持容器に保持された試料の移動を駆動するよう作動可能である。供給駆動システム102のモータ109は垂直駆動部材105に機械的に結合し、垂直両矢印126の方向に垂直駆動部材105の垂直移動を駆動するよう作動可能である。供給駆動システム102のモータ110は水平駆動部材106と機械的に結合し、水平両矢印125の方向に水平駆動部材106の水平移動を駆動し得る。なお、「水平」、「垂直」、「最上部」、「底部」、「上部」、「下部」等の用語は本明細書では、示された装置の説明を容易にするために使用されている。水平移動を垂直移動等で置き換えることは他の装置でも可能である。
【0010】
実装部材103は、切断部材または機構112に実装表面を提供する実装基部111を備え得る。切断部材または機構112は例えば、実装部材103に実装された多種の材料から成る刃もしくはナイフ、またはミクロトームに好適な他の種類の切断機構となり得る。切片受容部材113は切断部材112の片側に沿って設置してもよい。切片受容部材113は、切断部材または刃112により試料108から切断された切片を受け入れるように寸法を合わせている。この態様では、切片受容部材113は、刃112の切断エッジから実装部材103の表面まで伸長している傾斜表面を有し得る。切断部材または刃112が試料108をスライスし、試料108から切断した切片は、試料108から分離し、切片受容部材113に沿って伸長する。
【0011】
いくつかの実施態様で示したように、ミクロトーム100は表面配向センサアセンブリ114を備え得る。表面配向センサアセンブリ114は試料108表面の配向または角度を感知または測定するよう作動可能である。試料108の表面の配向または角度は多様な方法で感知または決定し得る。いくつかの実施態様では、試料108の表面がセンサアセンブリ114と接触し、センサアセンブリ114の1つ以上の移動可能部が試料108表面の配向に合わせてあることが下記でさらに詳細に説明されている。センサアセンブリの1つ以上の移動可能部が移動すると、ミクロトーム100が試料108表面の配向を自律的に感知または決定する。光学的機構および他の感知機構もまた好適である。
【0012】
感知された配向を利用し、切断部材もしくは機構112、および/または切断部材もしくは機構112に付随する切断平刃124と平行、実質的に平行、または少なくともやや平行になるよう試料108表面を調整または配列する。有利なことには、ミクロトーム100に切断された試料切片が十分均等に切断されるように、試料108表面は切断部材112および/または切断平刃124と平行になるように良好に配列している。いくつかの実施態様では、ミクロトーム100は任意に、切断部材112および/または切断平刃124と平行、または十分に平行、または少なくともやや平行になるように試料108表面の配向を自律的に調整または配列することが可能である。ミクロトーム100は、感知した配向に基づいて切断平刃および/または切断機構に対する試料表面の配向を自律的に感知および/または調整する論理回路を有し得る。これにより有利に、配列精度が改善され、さらに/またはオペレーターが手動で調整することから解放される。あるいは、前記調整は必要に応じて手動で行い得る。裁断方法の実施態様には、センサアセンブリ114を使用して試料108表面の配向をミクロトーム100が自律的に感知すること、試料108表面の配向をオペレーターが手動で、またはミクロトーム100が自律的に調整すること、ならびにこのような調整後に試料108の切片をミクロトーム100が取り出すことが含まれ得る。
【0013】
説明した実施態様では、センサアセンブリ114は、必要が無くとも供給駆動システム102と実装部材103間の位置で実装基部111と可動に結合する。実装基部111はセンサアセンブリ114に支持表面を提供し、垂直両矢印126Bの方向にセンサアセンブリ114が垂直にスライド移動するように寸法を合わせ、連結している。操作中、センサアセンブリ114は実装基部111に沿って、供給駆動システム102に向かって垂直方向に上方へスライド移動するよう作動可能であり、垂直駆動部材105は、供給駆動システム102がセンサアセンブリ114に向かって垂直方向に下降して移動するよう作動可能である。試料108をセンサアセンブリ114と十分垂直に配列すると、水平駆動部材106は、供給駆動システム102が水平矢印125の方向にセンサアセンブリ114に向かう水平方向で移動するよう作動可能となり、そうすることで試料108の表面はセンサアセンブリ114に対して適切に設置され、表面配向測定が可能となる。試料108の表面の配向を測定し、妥当な場合に再配列すると、センサアセンブリ114は図に示すとおり垂直下方向に(例えば試料保持容器に保持された試料と切断機構との間の移動から遠ざかる後退位置へ)後退するよう作動可能となる。
【0014】
再度、図1を参照すると、供給駆動シテム102の操作はハンドホイール104および/または制御装置116を使用して制御し得る。ハンドホイール104は、ハンドホイール104を係止するハンドルまたは他のパルス発生装置117を備え得る。垂直駆動部材105が垂直両矢印126に示す垂直方向に移動し、試料108が容易にスライスできるようにハンドホイール104の回転が操作可能である。いくつかの実施態様では、ハンドホイール104は供給駆動システム102と機械的に結合していない分離型ハンドホイールとすることも可能である。むしろ分離型ハンドホイール104は制御ライン119を介してエンコーダ(図示せず)および制御回路118と電気的に接続してもよい。分離型ハンドホイール104が回転すると、エンコーダは電気信号を制御回路118に送達することが可能となる。制御回路118は制御ライン120を介してモータ109に接続し、エンコーダからの電気信号にしたがって垂直駆動部材105の移動を制御するよう作動可能である。制御回路118はまた、制御ライン121を介してモータ110に接続し、制御ライン122を介してセンサアセンブリ114に接続する。
【0015】
エンコーダからの信号以外に、制御装置116からの信号は制御回路118に送信され、センサアセンブリ114、ハンドホイール104、モータ109および/またはモータ110の操作を制御または促進する。いくつかの実施態様では、制御装置116は例えば、キーボード、容量センサタッチパッド、または他の使用者もしくはデータ入力装置となり得る。いくつかの実施態様では、信号は制御ライン123を介して制御装置116と制御回路118間で送信される。他の実施態様では、制御装置116は、信号を無線で制御回路118へ送信するよう作動可能な無線制御装置であり、制御ライン123は省略される。
【0016】
図2は表面配向センサアセンブリの実施態様を示している。図では、対象となる適切な参照番号または参照番号の末端数字が複数の図の中で反復されており、これらは一致する構成部分または同様の性質を任意に有する類似構成部分を示している。例えば、図2の表面配向センサアセンブリ214は図1のセンサアセンブリ114に類似した性質を任意に有し得る。表面配向センサアセンブリ214は切断機構および/または切断平刃との試料表面の自律的な合致を促進するために使用する。有利なことには、切片が平らに切断されるように、試料表面は切断機構(例えば刃)に十分平行に配列されている。試料を配列するために、試料はセンサアセンブリ214と接触し、センサアセンブリ214は試料表面の配向を検出する。試料表面が切断平刃と平行に、あるいは十分に平行に配列されていない例もいくつかある。センサアセンブリ214は切断平刃に対する試料表面の角度を検出する。感知した情報を利用し、試料表面が切断平刃と平行に、または少なくともやや平行になる配置になるように試料を調整してもよい。
【0017】
センサアセンブリ214に関して説明した実施態様としては感知プレート230および感知フレーム231が挙げられる。感知フレーム231は感知プレート230の周囲に設置する。感知プレート230は平面的であっても、さらに/または平滑表面を有していてもよい(例えば平面的プレート)。感知プレートの厚さは素材にもよるが数ミリ程度(例えば0.5mm〜5mm)となり得る。感知プレートと交差している範囲は約20〜60mm程度でよい。感知プレートおよび感知フレームは例えばアルミニウム、ステンレススチール、他の金属、剛性プラスチックおよび保護コーティングで任意に被覆したそれらの組み合わせなどの多様な素材から成り得る。図では、感知プレート230および感知フレーム231は、長さや幅寸法に関して実質的に正方形であり、前記感知プレートのコーナーは面取りされており、前記感知フレームのフレームコーナー部はそれに合わせてあるが、代替的実施態様では、それらは事実上、正方形、あるいは長方形、円形、楕円形、八角形、六角形またはその他の形状であってもよい。1つの特定の例示的な実施態様では、感知プレートは寸法約39.5mm×39.5mmの正方形であり、保護コーティング(例えばポリテトラフルオロエチレン(PTFE)コーティング)を有するアルミニウムで構成され、感知フレームは約90mm×75mm×厚さ25mmであり、金属(例えばアルミニウム)および/またはプラスチックから成る。あるいは、感知プレートおよび感知フレームはその他の寸法でもよく、素材も他のもの(例えばステンレススチール、他の金属または各種プラスチック)でもよい。感知プレート230は第1軸支持部材232を中心に回転する第1感知部材であり、感知フレーム231は第2軸支持部材233を中心に回転する第2感知部材である。第1軸支持部材232は感知プレート230を対角線上に横断する。第2軸支持部材233は感知フレーム231を対角線上に横断する。第1軸支持部材232は第2軸支持部材233に実質的に垂直である(例えば80〜100度)。したがって、感知プレート230は感知フレーム231の回転軸に直角あるいは垂直な軸に沿って回転可能である。試料が感知プレート230の方へと押されると、感知プレート230および感知フレーム231は水平方向に移動可能にもなる。水平方向移動により、試料表面の水平配置に関する情報(すなわち図示したページ面の内側位置および外側位置)が得られる。この態様では、切断平刃に対する試料表面の角度方向ならびに試料表面の水平配置の両方が感知アセンブリ214に検出されることが可能である。
【0018】
センサアセンブリ214はさらに感知プレートセンサ234および感知プレート信号出力部材235を備える。感知プレート234を感知アセンブリフレーム238に取り付け、一方、感知プレート信号出力部材235を感知プレート230に取り付ける。図のように、1つの態様では、感知プレート信号出力部材235は、コーナーにある、もしくはコーナーに最も近い感知プレート230に取り付けるか、または感知プレート230の回転軸から最も離れた他の場所に取り付けてもよい。感知プレートセンサ234は、感知プレート信号出力部材235からの信号を受信するように感知プレート信号出力部材235と十分に合わせる。受信した信号は感知プレート230の回転または変位の程度の指標となる。例示により、第1軸支持部材232に沿った感知プレート230の回転角度(α)、典型的には数度程度(例えば0〜10°)の角度が、感知プレート信号出力部材235の移動角度およびそれに対応する感知プレート信号出力部材235から受信する信号強度に基づいて感知プレートセンサ234により検出し得る。いくつかの実施態様では、感知プレート信号出力部材235がマグネットを含んでもよい。この実施態様では、感知プレートセンサ234はマグネット235の磁場を感知し(例えば磁気抵抗性感知機構)、感知プレート230の配置を検出するよう作動可能である。あるいは、磁気を利用する代わりに、他の感知機構が使用され、例えば機械的センサ(例えば歪み計)、電気センサ(例えば静電容量を利用する)、光学的センサ、または他のセンサを任意に使用してもよい。
【0019】
センサアセンブリ214はまた、感知フレームセンサ236および感知フレーム信号出力部材237も備える。感知フレームセンサ236は感知アセンブリフレーム238に取り付け、一方、感知フレーム信号出力部材237は感知フレーム231に取り付ける。図のように、1つの態様では、感知フレーム信号出力部材237は、コーナーにある、もしくはコーナーに最も近い所にある感知フレーム231に取り付けるか、または感知フレーム231の回転軸から最も離れた他の場所に取り付けてもよい。感知フレームセンサ236は、感知フレーム信号出力部材237からの信号を受信できるように感知フレーム信号出力部材237と十分に合わせる。1つの例では、感知フレーム信号出力部材237はマグネットを有し、感知フレームセンサ236は磁場または感知フレーム信号出力部材237からの信号を検出し、典型的には数度程度(例えば0〜10°)の感知フレーム231の回転角度(β)を検出し得る。あるいは、磁気を利用する代わりに、他の感知機構を使用し得る。前述のとおり、感知フレーム231の第2軸支持部材233は、感知プレート230の第1軸支持部材232に対して実質的に直角である。したがって、第2軸支持部材233に関わる切断平刃に対する試料表面の角度が感知フレームセンサ236によりさらに検出可能となる。
【0020】
感知プレートセンサ234および感知フレームセンサ236に検出された第1軸支持部材232を中心にした感知プレート230の回転角度(α)および第2軸支持部材233を中心にした感知フレーム231の回転角度(β)はそれぞれ順に、センサアセンブリ214に接触している試料表面の最初の配向を反映している。試料表面が切断平刃に平行ではない、あるいはあまり平行ではないことを感知プレートセンサ234および感知フレームセンサ236が検出すると、センサアセンブリ214からミクロトーム100の制御部品(例えば制御回路118および/または制御装置116)へと信号が送られ得る。感知プレート230および感知フレーム231の回転から判定して、信号は切断表面が切断平刃から逸れた程度または範囲を示し得る。制御部品により自律的に、または使用者の決定の下で、供給駆動システムは試料表面の配向を最初の配向から、試料の切断表面が切断平刃と平行になるよう変えた配向へと修正し得る。
【0021】
1つの実施態様では、感知プレート230および感知フレーム231が切断機構および/または切断平刃と平行に配列されている条件を特徴づけるために較正を行う場合もある。例えば、感知プレート230および感知フレーム231は、例えば手動で、または機械的較正部品に強制されて移動され、そうすることでそれらは切断機構および/または切断平刃と平行に配列されるようになる。感知プレートセンサ234および感知フレームセンサ236の出力はこの条件での較正データとして測定し得る。例えば、感知プレート信号出力部材235および感知フレーム信号出力部材237が磁気抵抗性感知機構を使用する場合、較正データには、個々の感知プレートセンサ234および感知フレームセンサ236が受けた磁場の磁気抵抗値または強度指標が含まれる。この較正データは機械読み取り型媒体(例えばメモリー)に保存するか、あるいはその他の方法ではミクロトームで保管してもよい。
【0022】
較正データはその後、試料表面の配向を調整するときに呼び出し、使用し得る。例えば、感知プレートおよび感知フレームとの接触を維持しながら、一般的に短時間で試料表面の配向を調整するためにミクロトームは自律的に試料保持容器を調整し得る。この過程全体において、各感知プレートセンサ234および感知フレームセンサ236によりリアルタイムセンサ測定を複数回行う。例えば、磁気抵抗感知機構の場合、試料保持容器の各調整後に順次、磁気抵抗測定を複数回行う。これらのリアルタイム測定は、感知プレート230および感知フレーム231が切断機構および/または切断平刃と平行に配置されている条件に対応する保存もしくは保管された較正データと比較することもある。試料表面の配向が切断機構および/または切断平刃とさらに平行になるように調整すれば、リアルタイム測定は較正値と近い値になる可能性がある。その時点でのセンサ出力値(例えば、磁気抵抗値)が較正センサ値と合致、または十分に合致するまで調整をさらに行ってもよい。その時点でのセンサ出力値が較正値と合致、または十分に合致したら、それは試料表面が切断機構および/または切断平刃と平行または十分に平行であるということが示唆されていると考えられる。
【0023】
感知プレート230および感知フレーム231もまた水平方向に移動可能である(すなわちこの図で図示したページ面の内側位置および外側位置)。この態様では、第1付勢部材239および第2付勢部材240は第2軸支持部材233の端部に沿って配置し、試料に向かう方向に第2軸支持部材233を付勢する。いくつかの実施態様では、第1付勢部材239および第2付勢部材240はバネとなり得る。試料表面を感知プレート230に対して押すと、感知フレーム231および第2軸支持部材233が、試料から遠ざかる水平方向に後退する。光学的センサおよび他のセンサを図4Cの実施態様と関連させて詳細に述べることとする。これらは第2軸支持部材233の端部に、または端部付近に設置し、第2軸支持部材233の移動を検出するよう作動可能となり得る。例えば、第2軸支持部材233が一対の光学的センサ間の光線を遮断すると、試料ブロックがさらに移動することはなくなる。この態様では、切断平刃に対する試料の最前面の水平配置がセンサアセンブリ214により検出され得る。(例えば第2軸支持部材233の測定した水平位置ずれに基づいた)試料最前面の測定位置以外では、切断機構または切断平刃の位置も正確に分かる。情報のこれらの断片はまとめて、ミクロトームが正確かつ既知の厚みを持つ最初の切片を作成することに利用し得る。
【0024】
いくつかの実施態様で前述したように、感知アセンブリフレーム238は必要が無くとも実装部材241にスライド可能または移動可能に取り付けられ、他の実施態様では、センサアセンブリ214が切断部材または機構の下に固定されている場合がある。感知アセンブリ214を支持するために使用する実装基部(例えば図1の実装基部111)に実装部材241を固定で取り付け得る。感知アセンブリフレーム238は実装部材241に沿って垂直方向にスライド移動し得る。この態様では、実装部材241はガイドレール242、243を備え、感知アセンブリフレーム238はガイドレール244、245を備え得る。実装部材241と感知アセンブリフレーム238との間で、スライディング部材246はガイドレール242、244とスライド可能に結合し、感知アセンブリフレーム238が実装部材241に対してスライド移動できるようになる。スライディング部材246は、スライディング部材246の各反対側から伸長してスライディング部材246をそれぞれ第1ガイドレール242および第2ガイドレール244に結合させる第1ガイド部材248および第2ガイド部材249を備える。同様に、感知アセンブリフレーム238の反対側と実装部材241との間で、スライディング部材247はガイドレール243、245とスライド可能に結合している。スライディング部材247は、スライディング部材247の各反対側から伸長してスライディング部材247をそれぞれ第1ガイドレール245および第2ガイドレール243に結合させる第1ガイド部材250および第2ガイド部材251を備える。いくつかの実施態様では、ガイド部材248、249の1つは対応するガイドレールに固定して取り付け、他の一方は対応するガイドレールにスライド可能に取り付け得る。同様に、ガイド部材250、251の1つは対応するガイドレールに固定して取り付け、他の一方は対応するガイドレールにスライド可能に取り付け得る。感知フレームアセンブリ238の各側にある少なくとも1つのガイド部材が実装部材241とスライド可能に結合できることから、感知アセンブリフレーム238は実装部材241に対してスライド移動することが可能である。操作中、感知アセンブリフレーム238は試料保持容器に保持した試料に接触できる位置に上がるまで、ガイドレール242、243に沿ってスライド移動し得る。試料に接触した後、感知アセンブリフレーム238は実装基部の切断部材の下になる位置まで後退する(図1の実装基部111参照)。
【0025】
図3Aおよび図3Bはそれぞれ、後退位置および上昇位置にあるセンサアセンブリ314の実施態様を示す。図3Aは、感知プレート(図示せず)および感知フレーム(図示せず)が実装基部311の下に後退している後退位置にあるセンサアセンブリ314の実施態様を示す。図3Aに示すように、実装部材303は実装基部311の下に位置している。スライス操作中に、センサアセンブリ314は、スライス工程を妨げないように実装部材303内に後退させることが可能である。試料308が試料保持容器307に取り付けられていることが示されている。試料保持容器307は垂直駆動部材305に取り付ける。
【0026】
試料308の表面の角度配向を感知するため、感知プレート330が図3Bの実施態様に示された試料308と合うように、センサアセンブリ314を垂直に引き上げてもよい。図3Bに示すように、感知アセンブリ314のレール部材344はスライディング部材346に沿ってスライド移動し、感知プレート330を実装部材303の上方に引き上げて実装基部311の正面に配置させる。図示していないが、センサアセンブリ314の反対側に配置されたレール部材は、対応のスライディング部材に沿ってスライド移動し得る。試料308は感知プレート330に合わせ、感知プレート330へ向かう方向に水平に進ませる。その後、試料308の最前面の角度配向は感知プレート330に対して試料308の最前面を押すことで検出できる。検出された角度配向は、切断部材および/または切断平刃と平行、十分に平行、または少なくともやや平行になるように試料308最前面の角度配向の再配列を容易に行うために使用し得る。必要であれば、再配列過程全体にわたって異なる時点で、または繰り返してこのような感知測定を複数回行うことも可能であり、あるいは、1回の測定とその1回の測定に基づく1回の調製を行うことも可能である。裁断操作に向けてミクロトームを準備するために、図3Aに示すようにセンサアセンブリ314を実装基部311の下方へ下げることも可能である。
【0027】
再度、図1を参照し、この示された実施態様に注目すると、センサアセンブリ114は支持部材115と切断部材112および/または切断平刃124との間で水平に配置されている。図示のとおり、センサアセンブリ114は垂直に上下移動するよう作動可能である。支持部材115と切断部材112との間のセンサアセンブリ114の水平配置に関する1つの態様として、試料108は水平矢印125の方向で、切断部材112および/または切断平刃124に到達するまでに長めの水平距離を横断する必要がある。この理由は部分的に、3cm程度の超過した水平距離がセンサアセンブリ114の幅寸法、例えば図1に示す寸法「W」と合致しているためである。その長めの水平距離の横断は余計な時間がかかり、実装方式に依存的で望ましいものではないと思われる。例えば一般的に、水平方向移動は比較的、垂直方向移動より緩慢である。このことは、水平配置を正確にして裁断の厚さを正確に制御するために、水平方向移動の鋭敏な精度を要求する結果であると考えられる。
【0028】
センサアセンブリ114が試料108および/または支持部材115と切断機構112との間に水平に配置されていない代替的実施態様を考えてみる。例えば、いくつかの実施態様では、センサアセンブリ114は切断部材または機構112および/または切断平刃124の下にほぼ垂直に固定して配置し得る。切断部材112の下に垂直にセンサアセンブリ114を配置する1つの潜在的利点は、試料108が矢印125の水平方向で、切断部材112および/または切断平刃124に到達するまでに余計な距離(例えば3cm程度)を横断する必要がないことである。このことは、試料が切断部材112へと水平移動する時間を短縮することに役立つ。いくつかの実施態様では、垂直駆動部材105の垂直移動は水平駆動部材106の水平移動より比較的速いと思われる。垂直駆動部材105は、センサアセンブリ114に伸びる垂直矢印126の方向で余計な距離(例えば64cm)を下降する可能性がある。いくつかの例では、水平駆動部材106がセンサアセンブリ114の幅に起因して水平方向の余計な距離を移動する時間より、垂直駆動部材105が切断機構112の下でセンサアセンブリ114に伸びる垂直方向での余計な距離を移動する時間の方が短いと思われる。このことは表面配向を感知し、表面配向を調整する時間の短縮に役立つと思われる。
【0029】
前述したように、試料を感知プレートに向けて押すことにより試料の最前面の開始位置が検出され得る。それぞれの軸を中心にした感知プレートおよび感知フレームの回転度に基づいて、試料の表面の角度配向および位置が測定可能となる。数個の軸およびそれらの軸を中心にした感知プレートおよび感知フレームの回転を図4A、4B、4Cおよび4Dの実施態様に示す。
【0030】
図4Aは感知プレートの第1軸を有するセンサアセンブリ414の実施態様の斜視図の切り取り図を示す。図4Bは切断線B’‐Bに沿った図4Aのセンサアセンブリ414の実施態様の断面図を示す。この態様では、センサアセンブリ414は感知アセンブリフレーム438に取り付けた感知プレート430および感知フレーム431を備える。第1軸支持部材432は感知プレート430の対角線上に位置し、回転角度(α)で感知プレート430に回転の第1軸を付与する。第2軸支持部材433(図4D参照)は感知フレーム431の対角線上に位置し、感知フレーム431に回転の第2軸を付与する。回転の第2軸は回転の第1軸に実質的に垂直である(例えば80〜100度)。
【0031】
操作中、試料ブロック408(例えば、パラフィンブロックまたはカセットに包埋した組織試料)の最前面または切断表面を感知プレート430に向けて押す。試料ブロック408の表面は切断部材および/または切断平刃に平行ではない例もある。感知プレート430に向けて試料ブロック408の表面を押すと、図4Bに示すように第1軸支持部材432に沿って感知プレート430が回転し、それにより感知プレート430が試料ブロック408表面の角度配向と一致するようになる。第1軸支持部材432に沿う感知プレート430の回転度は感知アセンブリフレーム438に取り付けられた感知プレートセンサ430に検出される。その後この情報は試料ブロック408表面の角度配向を決定するために一部を使用する。
【0032】
感知プレート430の回転に加えて、試料ブロック408の表面に角度を付けると、図4Cおよび4Dに示すように第2軸支持部材432に沿って感知フレーム431が回転する。図4Cは、第2軸支持部材433を中心にした回転の第2軸と共に感知フレーム431を備えるセンサアセンブリ414の実施態様の斜視図の切り取り図を示す。感知フレーム431は角度(β)で回転の第2軸を中心にして回転し得る。図4Dは切断線D‐D’に沿って図4Cのセンサアセンブリ414の実施態様の断面図を示す。前述したように、第2軸支持部材433は感知フレーム431の対角線上に位置し、第1軸支持部材432に実質的に垂直である(例えば80〜100度)。このように、第2軸支持部材433に対して試料ブロック408の表面に角度を付けると、図4Dの実施態様に示すように、感知フレーム431は第2軸支持部材433を中心にして回転することとなる。回転度は感知アセンブリフレーム438に取り付けた感知フレームセンサ436に検出され得る。この情報は感知プレート430の回転度に関する情報と組み合わせ、試料ブロック408の最前面または切断表面の角度配向を決定し得る。
【0033】
感知フレーム431を水平方向に(例えば図1の水平両矢印125の方向)移動させる第1付勢部材439および第2付勢部材440を図4Cでさらに説明する。第1付勢部材439および第2付勢部材440を第2軸支持部材433の各反対側端部に沿って配置し、第2軸支持部材433を試料ブロック408に向けて水平方向に付勢することも可能である。いくつかの実施態様では、第1付勢部材439および第2付勢部材440はバネ、空気圧シリンタ゛ー等であってよい。試料ブロック408を感知プレート430に向けて押すと、第2軸支持部材433が第1付勢部材439および第2付勢部材部材440に押し付けられ、感知プレート430および感知フレーム431が試料ブロック408から遠ざかって水平方向に(例えば図1の水平両矢印125の方向)後退する。いくつかの実施態様では、この方向の移動の程度は例えば、第2軸支持部材433の各端部に設置された光学センサ、機械的センサ、磁場センサ等の光学的センサを使用して任意に検出し得る。光学センサにより、試料ブロック408から遠ざかる第2軸支持部材433の水平方向移動の程度が検出し得る。この水平方向変位の情報は感知プレート430および感知フレーム431の回転量に関する情報と併用し、試料ブロック408の最前面の角度配向のみならず試料ブロック408の最前面の水平位置をも決定し得る。有利なことには、試料ブロック408最前面の水平位置を把握していれば、目的の厚さに切断することに都合が良い。
【0034】
特定の構想をさらに説明するために、試料ブロック408の最前面の角度配向および試料ブロック408の最前面の水平位置の両方が決定し得る特定の非限定的実施態様を考慮されたし。この例示的実施態様では、感知プレート430および感知フレーム431は、その個々の軸に沿って、(例えば)約5度以下の試料ブロック408表面の(切断平刃に対する)角度を個々に検出し得る。特に、感知プレート430は切断平刃に平行な初期位置から約5度(5°)以下で傾いて、第1軸支持部材432を中心に回転し得る。同様に、感知フレーム431は切断平刃に平行な初期位置から約5度(5°)以下で傾いて、第2軸支持部材433を中心に回転し得る。感知プレート430に向けて試料ブロック408の表面を押すと、感知プレート430および/または感知フレーム431は、試料ブロック408の表面が切断平刃から逸れる程度と同等の角度まで回転し得る。感知プレート430および感知フレーム431は約7度(7°)以下の接触角度を検出し、この特定の実施態様では、試料ブロック408の表面が切断平刃から逸れる全体的な角度配向を決定し得る。
【0035】
角度配向が決定されると、ミクロトームは自律的に調整を決定し、決定した調整によって試料ブロック408の表面の角度配向を自律的に調整し、そうすることで表面は切断部材および/または切断平刃に対して平行、実質的に平行またはやや平行になる。例えば、試料ブロック408の表面が全角度約4度(4°)で切断平刃から逸れていると、試料ブロック408の表面はその後、切断平刃にほぼ平行になるように反対側の方向へ約4度(4°)回転し得る。必要に応じて、微調整で角度を徐々に小さくしながら感知測定を複数回行ってもよい。当然のことながら、この例示的実施態様で記述した特定の回転角度より大きい、または小さい回転角度のいずれかを他の実施態様でも利用し得る。また、試料ブロック408を感知プレート430に向けて押すと感知フレーム431の水平移動を感知するセンサを使用して、試料ブロック408の最前面の水平位置を検出してもよい。試料ブロック408の最前面の水平位置を把握していれば、ミクロトームは望ましい厚さで初めの切断を行い得る。
【0036】
図2、図3A〜3Bならびに図4A、4B、4Cおよび4Dに示すセンサアセンブリ214、314および414はそれぞれ、好適な表面配向センサの例示的な実施態様である。しかし、他の表面配向センサも検討してみる。これらの代替的表面配向センサのいくつかは、上述したセンサアセンブリ214、314および414と同様に、接触に基づくセンサまたはセンサアセンブリである。しかしそれらは試料表面の配向の感知に、異なる接触型感知機構を利用することが可能である。例えば、1つの代替的実施態様では、感知フレームの使用よりむしろ、感知プレートを単一ピボット(例えばボールジョイント)に実装してもよく、これにより感知プレートが試料の切断表面の配向に一致するように二次元回転するようになる。さらに他に検討した表面配向センサとしては、試料表面の配向を決定するために試料表面に接触する必要のない非接触型センサがある。例えば1つの実施態様では、例えば1つ以上のレーザービームを表面に向けて走査することにより光学感知システムが試料表面の配向を光学的に感知し得る。他のアプローチでは音響効果、干渉分光法等に基づくものもある。
【0037】
切断部材および/または切断平刃と平行またはやや平行になるように試料表面の配向を再配列することが可能な試料保持容器が当技術分野で公知である。いくつかの実施態様では、切断部材および/または切断平刃に対して試料の切断表面の配向を二次元的に調整することが可能な多軸ワークピースチャックまたは電動チャックが供給駆動部材に備えられてもよい。好適な多軸ワークピースチャックの例としては「MULTI-AXIS WORKPIECE CHUCK」という標題で2004年1月22日にXuan S. Buiらに出願された米国特許第7,168,694号に記述があり、本出願の承継人に譲渡している。1つの実施態様では、多軸チャックは、前記チャックに対して実質的に固定した配向で試料などのワークピースを保持する実装アセンブリを有してもよい。チャックはモータ駆動であり、垂直な少なくとも2つの軸を中心に回転し得る。チャックはオペレーターが1つ以上のモータと連通しているコントローラを使用して手動で回転させるか、あるいはミクロトームが自律的にチャックを回転させてもよい。チャックの位置を感知するために1つ以上のセンサを使用してもよい。1つの実施態様にしたがって、各軸はチャックの中間の基準位置および端部位置を検出する3つのセンサを有し得る。モータに信号を送り、チャックを回転させることにより、使用者またはミクロトームはチャックの望ましい位置への移動を制御し得る。所望の位置へ到達したかを判断するためにセンサを使用してもよい。1つの実施態様では、チャックは少なくとも2つの直角に交わる軸を中心に回転可能な第1および第2部分を有してもよい。第1部分は第2部分と無関係に、第1軸を中心に回転し得る。第2軸を中心に第2部分が回転すると、第1部分も第2軸を中心に回転し得る。このことによりチャックは多次元に回転し得る。
【0038】
いくつかの実施態様では、係止機構も任意に備え得る。多軸チャックが回転した後に、係止機構は所望の位置に多軸チャックを係止し得る。この係止機構は例えば、第1、第2および第3部分を摩擦または他の公知の方式で係止する永久マグネットソレノイド、歯車付モータまたは回転ハンドルとすることができる。1つの実施態様では、チャックが調整されていない時点でチャックを締め付けるためにモータを使用してもよい。チャックを調整することによってミクロトームが試料の位置の調整を決定すると、またはチャックを調整することによって使用者が組織試料の位置の手動調整を決定すると、チャックを緩めてチャックが調整されるようにモータには信号が送られる。他の場合では、チャックの位置を調整しない場合、チャックを締め付けられた形態または緩められた形態で維持するようモータに信号が送られ、そうすることでチャックの位置および/またはチャックに保持された試料の位置は不用意に変化しない。
【0039】
いくつかの実施態様では、裁断のサイクルは以下の工程を含み得る:(1)切断平刃に向かって前進する水平方向に、望ましいスライス厚に合わせた所定の距離で試料ブロック408を移動させる工程;(2)切断部材に向かって垂直方向(例えば下方)に試料ブロック408を移動し、薄片を得る工程;(3)切断平刃および/または切断部材から遠ざかる後方または反対側へ水平方向に、所定の距離で試料ブロック408を移動させる工程;および(4)切断部材から遠ざかる反対側の垂直方向に(例えば上方)試料ブロック408を移動させる工程。切断部材から遠ざかる反対側の垂直方向(例えば上方)に試料ブロック408を移動させる工程(4)の実行中、切断部材から遠ざかる後方側へ水平方向に試料ブロック408を後退または移動させると、試料ブロック408と切断部材との接触が回避しやすくなる。典型的には、試料ブロック408が後退する距離はスライスした試料の厚さと等しいと言える。あるいは、いくつかの実施態様では、後退の工程は省略できるものと考えられている。スライスのサイクルは、目的の薄片数が得られるまで反復し得る。
【0040】
いくつかの実施態様では、ミクロトームは裁断サイクルの異なる段階で供給駆動システムおよび/または試料(例えば図4Aの試料ブロック410または図1の試料108)の移動に異なる速度を使用することが可能である。例えばいくつかの実施態様では、裁断サイクルの1つ以上の非裁断過程の間(例えば試料の切断または裁断が行われていない間)、供給駆動システムおよび/または試料の移動速度を比較的高めることが可能であり、それに対して裁断サイクルの裁断過程の間(例えば試料の切断または裁断が行われている間)、供給駆動システムおよび/または試料の移動速度を比較的低下させることが可能である。試料の切断または裁断中に供給駆動システムおよび/または試料の移動速度を比較的低下させると、切片の質が高まり、さらに/あるいは切片がより均等になる傾向にあり、それに対して、裁断サイクルの1工程以上の非裁断過程を速めると、裁断サイクルの全体的な速度の改善が促され、所与の時間内により多くの切片が作成される。このように、供給駆動システムおよび/または試料の移動速度は裁断サイクル全体にわたって可変である。例えば、薄片を得るために切断部材に向かう垂直方向(例えば下方に)の試料ブロック410または試料108の移動(例えば上記段落の操作(2))が裁断サイクルの1工程以上の他の工程(例えば上記段落の操作(1)、(3)、(4)またはそれらの組み合わせ)より速度低下するように、使用者は裁断サイクルを制御またはプログラミングし得る。
【0041】
いくつかの実施態様では、ミクロトームは、裁断サイクルの設定可能またはプログラミング可能な裁断工程を特定する論理回路を有し、そこでは供給駆動システムおよび/または試料の移動は比較的低速にしてある。例えばいくつかの実施態様では、ミクロトームは、設定可能またはプログラミング可能な裁断長を設定またはプログラミングする論理回路を有し得る。例示により、前記長さは、異なる寸法を有する異なる種類のカセットに対応する複数の所定の長さから選択し得る。異なる種類のカセットは、裁断を行う裁断長が異なっている。1つの例として、カリフォルニア州TorranceのSakura Finetek USA Inc.から市販されている7019 Paraform(登録商標)銘柄のBiopsy 13 mm x 13 mm Cassetteおよび7020 Paraform(登録商標)銘柄のBiopsy 26 mm x 19 mm Cassetteが異なる裁断長を有する。1つの例示的な実施態様では、ミクロトームは、オペレーターが裁断長を特定または指示することができるよう作動可能とし得る。裁断長の特定または指示は異なる方法、例えば長さを特定する方法、複数の所定の長さから1つの長さを選択する方法、カセットの種類を特定する方法、複数の異なる種類のカセットから1つの種類のカセットを選択する方法等により実行し得る。例えば、使用者が特定の種類のカセットから切片を作成する準備が整っている時点で、使用者は制御装置(例えば図1の制御装置116)を使用して特定の種類のカセットを選択することが可能であるし、ミクロトームは特定の種類のカセットに対応する所定の裁断長ですでに予めプログラミングされている場合もある。裁断中、ミクロトームでは、供給駆動システムおよび/または試料が指定の裁断長を移動するときの速度を比較的低速にし、裁断サイクルの1工程以上または実質的にすべての他の工程では移動速度を比較的高速にしてもよい。例えば、指定の裁断長での試料切断の開始時または直前、および終了時または直後に、速度を比較的高速にしてもよい。
【0042】
いくつかの実施態様では、ミクロトームは、試料(例えば図1の試料108または図4Aの試料ブロック408)の所与の、または所定の部分を初めに自律的に切り出す論理回路を有し得る。例えばその部分は、切片を得るべき実際の組織素材を覆い隠しているパラフィン、包埋素材、カセット素材または他の非組織素材(例えば組織素材の切断表面と感知プレートに接触する試料の最前外表面との間に配置している)の所与の、または所定の厚さを有し得る。例として、試料はカセット底部に設置した組織片およびカセットおよび包埋素材のブロックに包埋した組織試料を含み得る。カリフォルニア州TorranceのSakura Finetek USA Inc.製の各種カセットの例では、カセットはパラフィンと類似した裁断特性を有するParaform(登録商標)銘柄のカセット素材を含み、カセット底部のParaform(登録商標)銘柄のカセット素材を経て裁断を行ってもよい。
【0043】
いくつかの実施態様ではミクロトームは、試料の所与の、または所定の部分、例えば裁断したい実際の組織素材を覆い隠しているパラフィン、包埋素材、カセット素材または他の非組織素材の一部を初めに自律的に切り出す論理回路を有し得る。例えば、ミクロトームは試料の実際の組織素材を露出するために、またはそれと接触するためにカセット底部を自律的に切り出し得る。典型的には、特定のカセットの例では、カセット底部を形成する素材の厚さおよび切片の厚さにより、ミクロトームは複数の(例えば約2〜約20個、多くの場合、約5〜約15個)切片を自律的に形成し、所定の厚さのカセット底部を切り出し得る。カセット底部の厚さはミクロトームにより認識するか、あるいは規定のものであってもよい。例えば、使用者が直接に厚さを特定するか、あるいは、プログラミングまたはその他の方法で知り得たカセット底部の厚さをそれぞれが有する数個の異なる種類から1種類のカセットを選択してもよい。いくつかの例では、例えば制御装置上の使用者入力装置(例えばトリムボタン)により、あるいはその他ではトリム操作を選択して、オペレーターは自動的処理を行うためにミクロトームを制御し得る。有利なことには、ミクロトームにより試料部分(例えばカセット底部)を自律的に切り出すと、オペレーターはそのように処理する義務から解放され得ることになり、さらに/あるいは試料部分(例えばカセット底部)の切り出しの速度が高まりやすくなる。その後、試料の実際の組織が露呈するとすぐに、組織の薄片または切片を得る裁断サイクルが開始し得る(例えば、オペレーターが裁断ボタンを押すか、あるいはその他の方法ではミクロトームがその時点で露呈した組織試料の切断表面から切片を取り出してもよい)。
【0044】
前述したように、スライス操作は自動的に、あるいはシステムと相互に作用させた使用者の手動により進行し得る。図5はハンドホイールおよび制御装置を含むミクロトームの操作を制御するための制御システムの実施態様を説明している。制御システム560はハンドホイール504および制御装置516を備え得る。ハンドホイール504はハンドホイール504を係止するためのハンドルまたは他のパルス形成装置517を備え得る。いくつかの実施態様では、非機械的結合または非機械的機構(例えば電気的結合)を利用してハンドホイール504をモータ510に結合する。典型的には、ミクロトームはモータに機械的に結合したハンドホイールを備える。しかしこのような機械的結合は、使用者がハンドホイールを回転させようとするとハンドホイールに抵抗性が掛かる。このようなハンドホイールの反復回転は使用者に負担がかかり、時には手根管症候群などの医学的症状の原因となる可能性がある。本明細書で開示した非機械的結合または機構は、ハンドホイールの抵抗性を低減する利点をもたらし、ハンドホイールの回転が容易になる可能性がある。
【0045】
いくつかの実施態様では、非機械的結合または機構は第1エンコーダ561を備える。第1エンコーダ561はハンドホイール504のシャフト562に結合した回転エンコーダとなり得る。ハンドホイール504、次にシャフト562を回転させると、第1エンコーダ561にハンドホイール504の角度位置が提供される。その後、第1エンコーダ561は前期角度位置を電気的表示(例えばアナログまたはデジタルコードまたは数値)に変換する。このアナログまたはデジタルコードは制御ライン519を介して制御回路518に送信され、ここで処理され、モータ510、次に供給駆動部502の移動を方向付けるために利用される。いくつかの実施態様では、供給駆動部502と結合しているモータ510は、第2エンコーダ564により制御回路518と接続し得る。この態様では、切断操作中、第2エンコーダ564がモータ510の位置を検出できるように、モータ506のシャフト563は第2エンコーダ564に接続してもよい。その後、エンコーダ564はこの位置情報を電気的表示(例えばアナログまたはデジタルコードまたは数値)に変換し、この電気的表示を制御ライン520を介して制御回路518に送信する。いくつかの実施態様では、制御回路518は少なくとも部分的にハンドホイールの角度位置の電気的表示に基づいてモータを制御し得る。例えば、ハンドホイール504およびモータ510の位置は両方とも既知であることから、切断操作中、ハンドホイール504の位置がモータ510の位置に対応し、それと合致することが制御回路518により確実となり得る。例えば、個々の第1および第2エンコーダから得た信号を比較して、ハンドホイール504の位置がモータ510の駆動シャフトの位置と合致していることが示されるまで、ハンドホイール504の回転がモータ510を移動させることはない。このことは、特に裁断の自動モードから裁断の手動モードへと切り替える場合に、ミクロトーム操作の安全性が高まる傾向にある。
【0046】
制御装置516はさらに自動切断操作を開始するよう操作可能である。制御装置516は切断操作の開始に適した入力装置であればどのような種類でもよい。典型的には、制御装置516には例えば、キーボード、キーパッド、容量センサタッチパッドまたは他の使用者データ入力装置が挙げられる。いくつかの実施態様では、信号は制御ライン523を介して、制御装置516と制御回路518との間で送信される。他の実施態様では、制御装置516は、無線制御信号を制御回路518に送信し、制御回路518から無線信号を任意に受信するよう作動可能な無線制御装置となり得る。制御ライン523は省略してもよい。無線制御装置516は無線送信機、無線レシーバーおよび/または無線トランシーバー、無線プロトコルスタックおよび無線装置に見られるようなその他の一般的な部品を有し得る。1つの態様では、無線制御装置516はブルートゥース対応装置となり得るが必須ではない。
【0047】
制御装置516はミクロトームの動作を制御するために使用可能なキーまたは擬似キーを備え得る。典型的には、ミクロトームの垂直もしくは水平移動に対応する矢印など、ミクロトームの多様な操作に対応する図記号もしくは文字列、および/または、例えばスライス、停止、開始、カセット底部のトリム、裁断、係止もしくは他のミクロトーム操作に対応する他の用語、記号、図柄等をキーにより表してもよい。使用者は制御装置516を使用して実行すべき操作を選択し、適当なキー(単数または複数)を押し、所望の操作を開始する。制御信号は制御装置516から制御回路518へ送信される。その後、制御回路518は切断操作を開始するために例えばモータ510に信号を送る。その後、使用者が停止キーを押すか、あるいはプログラミングされた切断操作が完了するまで、実質的に使用者がさらに介入することもなく切断操作は自動的または自律的に継続し得る。
【0048】
図6はミクロトームの供給駆動システムの実施態様の斜視図を示す。1つの実施態様では、供給駆動システム602は図1を参照して説明した供給駆動システム102に使用し得る。あるいは、供給駆動システム102は供給駆動システム602とは全体的に異なる供給駆動システムを使用してもよい。供給駆動システム602は垂直駆動部材605、水平駆動部材606および試料保持容器607を含む。切断部材を保持する実装部材603はさらに、試料保持容器607の正面に設置し得る。1つの実施態様では、実装部材603は図1を参照して説明した実装部材103と実質的に類似していると言える。
【0049】
操作中、垂直駆動部材605のスライダ(図示せず)を垂直にトラックに沿って移動させることによって供給駆動システム602を垂直に移動させる。回転プレート(図示せず)に取り付けられてベルト671およびモータ(図示せず)を駆動させて回転するピン(図示せず)を回転させることによりスライダは移動する。モータにかかる負荷を軽減するために、供給駆動システム602の重量を平衡錘でバランス調整する場合もある。例えば1つの実施態様では、平衡錘の代わりにバネアセンブリ672を用いて重量をバランス調整する場合もある。平衡錘が過重傾向になるとミクロトームの重量も費用も増加してしまう傾向にある。あるいは、平衡錘は必要に応じて使用してもよい。バネアセンブリ672は滑車673‐1、673‐2、673‐3を含み得る。滑車673‐1はピン670に取り付けてもよい。ケーブル674は滑車673‐1の一端に取り付け、滑車673‐2および673‐3の周囲に伸長し、バネ675の反対側の端部に取り付けてもよい。この態様では、供給駆動システム602が垂直に移動するとバネ675はケーブル674に対するバランス調整力を示し、次いでピン670を引き出し、供給駆動システム602の重量に対抗する。バネアセンブリ672は平衡錘を省略してシステムの重量を軽減し、モータにかかる慣性負荷を軽減することに役立つ可能性がある。バネアセンブリ672を1つの実施態様で説明しているが、他の実施態様では、供給駆動システム602を平衡錘でバランス調整するためにピン670に取り付けた半円の重い塊を使用し得ることもさらに考えられる。また、半円の重い塊は供給駆動システム602を平衡錘としてバランス調整することには効果的であるが、モータにかかる慣性負荷を増加させる傾向にある。
【0050】
いくつかの実施態様では、ミクロトームは供給駆動システム(例えば図1の供給駆動システム104または図6の供給駆動システム602)を垂直位置に係止するよう作動可能な輪止めを任意に含み得る。1例として、輪止めにはバネ付勢式ディスクブレーキが挙げられる。バネ付勢式ディスクブレーキは、ディスクブレーキ、ピンまたは他の係止部材、および意図した解除信号が付与されない場合にピンまたは他の係止部材をディスクブレーキとの係止係合部に付勢する1つ以上のバネまたは他の機械的付勢要素を含み得る。当技術分野で公知である他の種類の輪止めは例えばピン、または穴に付勢された他の係止部材なども好適である。輪止めが不用意に機能しなくなった場合、固定し、係止した垂直位置で輪止めは供給駆動システムを維持し得る。供給駆動システムの移動が必要な適当な時点で、輪止めを開けるために解除信号(例えば電気的信号)を意図的に輪止めに送ることも可能である(例えば、バネを圧縮してディスクブレーキを解除し得る)。有利なことには、このような輪止めは、例えば電源異常やその他の事象で供給駆動システムが移動または落下したことによりオペレーターが被害を被る可能性を防止、または少なくとも低減することに役立つと考えられる。このような輪止めが無い場合、供給駆動システムが不慮に落下あるいは移動すれば、オペレーターは刃または他の切断部材に損傷を受ける可能性がある。
【0051】
本明細書全体にわたる「1つの実施態様」または「1つ以上の実施態様」に対する参照は例えば、特定の特徴が本発明の実施に包含され得ることを意味していることも賞賛に値する。同様に、開示を合理化し、多様な独創的態様の理解を深める目的で、明細書中、多様な特徴を単独の実施態様、図またはそれらの説明でまとめてグループ化した場合もあることは賞賛に値する。しかし、各請求項で明確に引用したものより多くの特徴を要求する本発明の意図を反映しているとして、この開示法を解釈すべきではない。むしろ、以下の請求項が反映しているように、独創的態様は、開示した単独の実施態様の特徴すべてより少ないと言える。したがって「詳細な説明」にしたがった請求項は、各請求項が個々の実施態様として自立しながら、この「詳細な説明」に明確に本明細書によって組み込まれている。
【0052】
前述の明細書では、本発明をその特定の実施態様を参照して説明してきた。しかし、添付の請求項に記載した本発明の広範な精神および範囲から逸脱せずに、そこに多様な修正および変更を行うことが可能であるのは明らかである。したがって明細書および図面は限定的意味合いというより説明的意味合いでとらえるべきである。
【0053】
上述では、説明目的で、本発明の実施態様を完全に理解させるために多数の特定の詳細を記述している。しかしこれら特定の詳細の一部がなくとも、1つ以上の実施態様が実行可能であることは当業者にとって明白なことである。記述した特定の実施態様は本発明を限定するためではなく、説明するために提供している。本発明の範囲は上述の特定の例に決定されるものではなく、下記の請求項にのみ決定される。その他の例では、説明の理解が曖昧になることを避けるために、ブロック図形式で、あるいは詳述することなく周知の回路、構造、装置および操作を示している。
【0054】
例えば、実施態様の構成要素の寸法、形状、構造、結合、形態、機能、素材、ならびに操作、組み立ておよび使用の方式など、本明細書に開示された実施態様に修正を行うことは当業者に高く評価されるものとなろう。図に示し、明細書で説明したものと同等の関連事項すべては本発明の実施態様内に包含されている。さらに、妥当と考えられる場合に、参照番号または参照番号の末端数字が複数の図の中で反復されており、これらは一致する構成部分または同様の性質を任意に有する類似の構成部分を示している。
【0055】
多様な操作および方法が記述されている。いくつかの方法が基本的な形式で記述してあるが、任意に、操作を方法に加えても、操作を方法から省いてもよい。また、例示的な実施態様にしたがった操作の特定の順序を記述している一方で、当然のことながら、その特定の順序は例示的なものである。代替的実施態様は異なる順序での操作、特定の操作の併用、特定の操作の重複等を任意に行い得る。方法に対して多くの修正および適応を行い、検討してよい。
【0056】
1つ以上の実施態様は機械呼び出し型および/または機械読み取り型媒体を備える製品(例えばコンピュータプログラム製品)を含む。前記媒体は、機械により呼び出し可能および/または読み取り可能である形態で情報を提供する(例えば保存)機構を含み得る。機械呼び出し型および/または機械読み取り型媒体は指標配列および/またはデータ構造を提供するか、あるいは保存し、それらはもし機械で実行する場合には機械処理を誘発または開始し、さらに/あるいは本明細書に開示の操作または方法の1つ以上または一部を機械に実行させるものである。1つの実施態様では、機械読み取り型媒体には具体的な持続性の機械読み取り可能な保存媒体が挙げられる。例えば具体的な持続性の機械読み取り可能な保存媒体には、フロッピー(登録商標)、光学的保存媒体、光学的ディスク、CD‐ROM、磁気ディスク、光磁気ディスク、読み取り専用メモリ(ROM)、プログラミング可能ROM(PROM)、消去可能およびプログラミング可能ROM(EPROM)、電気的消去可能およびプログラミング可能ROM(EEPROM)、ランダムアクセスメモリ(RAM)、スタティックRAM(SRAM)、ダイナミックRAM(DRAM)、フラッシュメモリ、相変化メモリまたはこれらの組み合わせが挙げられる。具体的な媒体としては、例えば半導体材料、相変化材料、磁性材料等の1つ以上の信頼性のある、または具体的な物理的材料が挙げられる。
【0057】
「1つの実施態様」または「1つ以上の実施態様」に対する本明細書全体にわたる引例が例えば、特定の性質が本発明の実行に含まれ得ることを意味していることもまた高く評価すべきである。同様に、開示を合理化し、多様な独創的態様の理解を助ける目的で、明細書中、多様な特性が単一の実施態様、図面またはそれらの説明の中にまとまって群を形成している場合があることは高く評価すべきである。しかし開示のこの方法は、本発明が各請求項で明確に引用したものよりさらに多くの態様を必要とする意図を反映していると解釈すべきではない。むしろ、以下の請求項が反映しているように、独創的態様は開示された単一の実施態様の特徴すべてに掛かっている訳では決してない。したがって「詳細な説明」に続く請求項は本明細書によりこの「詳細な説明」に明確に組み込まれており、各請求項は本発明の別個の実施態様としてそれ自身に基づいている。
【特許請求の範囲】
【請求項1】
試料から切片を切断するよう作動可能な切断機構;
前記試料を保持するよう作動可能な試料保持容器;
前記試料保持容器に結合し、前記試料保持容器に保持された前記試料と前記切断機構間の移動を駆動するよう作動可能である駆動システム;および
前記試料保持容器に保持された試料の表面の配向を感知するよう作動可能である表面配向センサを含む試料裁断装置。
【請求項2】
前記表面配向センサが二次元的に回転可能である請求項1に記載の試料裁断装置。
【請求項3】
前記表面配向センサが第1軸を中心に回転可能な第1部材、および第2軸を中心に回転可能な第2軸から成り、前記第1軸が第2軸に対して実質的に垂直である請求項2に記載の試料裁断装置。
【請求項4】
前記第1部材がプレートから成り、前記第2部材が前記プレートと結合したフレームを含む請求項3に記載の試料裁断装置。
【請求項5】
前記第1軸を中心にした前記第1部材の回転を感知するように構築された第1感知機構;および
前記第2軸を中心にした前記第2部材の回転を感知するように構築された第2感知機構をさらに含む請求項3に記載の試料裁断装置。
【請求項6】
前記第1部材および前記第2部材が前記表面配向センサと可動に結合し、前記試料が前記第1および第2部材のうち1つ以上に対して力を加えたときに前記試料から遠ざかる方向で移動可能となる請求項3に記載の試料裁断装置。
【請求項7】
前記第1および第2部材が前記試料から遠ざかる方向に向かう移動量を感知するように構築された感知機構をさらに含む請求項6に記載の試料裁断装置。
【請求項8】
前記試料保持容器と結合し、前記試料表面の前記配向を調整することが可能である電動チャック;および
感知した前記配向に基づいて、前記試料裁断装置に前記試料表面の前記配向を自律的に調整させる論理回路:をさらに含む請求項1に記載の試料裁断装置。
【請求項9】
前記論理回路が、前記切断機構と連動している切断平刃に対する前記試料表面の前記配向を前記試料裁断装置に複数回自律的に調整させる論理回路を含み、一方、前記試料表面の前記配向を前期切断平刃と平行にするために、前記試料表面の調整済み配向を前記表面配向センサにより感知させる請求項8に記載の試料裁断装置。
【請求項10】
前記電動チャックの位置を係止し、固定配向の前記試料保持容器により保持された前記試料表面の配向を保持するよう作動可能な前記電動チャックのモータをさらに含む請求項8に記載の試料裁断装置。
【請求項11】
前記表面配向センサを1箇所で前記試料裁断装置と固定で結合させ、前記位置を前記切断機構と実質的に垂直に配列する請求項1に記載の試料裁断装置。
【請求項12】
前記表面配向センサが前記試料裁断装置と可動に結合し、前記試料保持容器に保持された前記試料表面の前記配向を感知するように前記表面配向センサが配置されている第1位置と、前記試料保持容器に保持された前記試料および前記切断機構間の前記移動からさらに遠ざかる第2後退位置との間で前記表面配向センサが移動するよう作動可能な請求項1に記載の試料裁断装置。
【請求項13】
ハンドホイール;
第1シャフトにより前記ハンドホイールと結合し、前記ハンドホイールの角度位置の電気的表示を形成するよう作動可能な第1エンコーダ;
前記駆動システムのモータ;
第2シャフトにより前記駆動システムのモータと結合し、前記駆動システムの前記モータの角度位置の電気的表示を形成するよう作動可能な第2エンコーダ;ならびに
前記第1および第2エンコーダと電気的に結合し、前記ハンドホイールおよび前記モータの前期角度位置の前記電気的表示を受信するよう作動可能であり、前記ハンドホイールの前期角度位置の前記電気的表示に少なくとも部分的に基づいて前記モータを制御するよう作動可能である制御回路をさらに含む請求項1に記載の試料裁断装置。
【請求項14】
前記ハンドホイールの前記角度位置の前記電気的表示の比較まで前記モータが移動しないよう制御できるように前記制御回路が操作可能であり、前記ハンドホイールの位置が前記モータの位置と合致していることを前記モータが示す請求項13に記載の試料裁断装置。
【請求項15】
設定可能な裁断長を指定できる論理回路をさらに含み、前記指定の裁断長のときは比較的緩慢な移動速度で、前記指定の裁断長の移動の直前および直後のうち少なくともどちらか一方では比較的速い移動速度で前記試料を移動させる請求項1に記載の試料裁断装置。
【請求項16】
前記論理回路が、前記試料を保持するために使用する多種のカセットに各々対応する複数の所定の裁断長から前記裁断長をオペレーターが選択できる論理回路を含む、請求項15に記載の試料裁断装置。
【請求項17】
前記論理回路が、複数の多種のカセットの中から1つを選択することによってオペレーターが裁断長を指定できる論理回路を含む、請求項15に記載の試料裁断装置。
【請求項18】
前記試料内に組織を覆い隠し、前記組織を保持するカセットの底部厚に伴う所与の試料厚を前記試料裁断装置が自律的に切り出せる論理回路をさらに含む請求項1に記載の試料裁断装置。
【請求項19】
前記試料裁断装置に制御信号を送信するよう作動可能であり、前記試料裁断装置が前記試料の前記所与の厚さを自律的に切り出せる前記論理回路を使用者に発動させる使用者入力装置を有する制御装置をさらに含む請求項18に記載の試料裁断装置。
【請求項20】
無線制御信号を前記試料裁断装置に送信するよう作動可能な無線制御装置をさらに含む請求項1に記載の試料裁断装置。
【請求項21】
試料裁断装置に保持された試料を、表面配向センサに関連させて位置づける工程;
前記表面配向センサにより、前記試料裁断装置に保持された前記試料の表面の配向を感知する工程;
前記試料表面が、前記試料裁断装置の切断機構と関連させて切断平刃とやや平行になるように、前期試料裁断装置に保持された前記試料表面の前記配向を調整する工程;および
前記試料表面の前記配向を調整した後に前記試料裁断装置により前記試料の切片を作成する工程を含む方法。
【請求項22】
前記表面配向センサにより前記試料表面の前記配向を感知する工程が、前記表面配向センサを二次元的に回転させる工程を含む請求項21に記載の方法。
【請求項23】
前記表面配向センサを二次元的に回転させる工程が、第1軸を中心に第1部材を回転させる工程および第2軸を中心に第2部材を回転させる工程を含み、前記第1軸が前記第2軸に対して実質的に垂直である請求項22に記載の方法。
【請求項24】
前記試料が前記表面配向センサの一部に力を加えて前記試料から遠ざかる方向に前記表面配向センサの一部を移動させる工程;および
前記表面配向センサの一部が前記試料から遠ざかる移動量を感知する工程をさらに含む請求項22に記載の方法。
【請求項25】
前記試料裁断装置が前記試料表面の前記配向を自律的に調整する工程を調整工程に含める請求項21に記載の方法。
【請求項26】
設定可能な裁断長を指定する工程をさらに含み、前記試料の前記切片を作成する工程が、前記指定された裁断長で前記試料から前記切片を切断するときは比較的緩慢な移動速度で前記試料を移動する工程、および前記指定された裁断長での前記移動の直前または直後の少なくとも一方で、比較的速い移動速度で前記試料を移動する工程を含む請求項21に記載の方法。
【請求項27】
複数の切片を自律的に作成する前記試料裁断装置が、組織を保持するカセットの底部を切り出し、組織を露出させることをさらに含む請求項21に記載の方法。
【請求項1】
試料から切片を切断するよう作動可能な切断機構;
前記試料を保持するよう作動可能な試料保持容器;
前記試料保持容器に結合し、前記試料保持容器に保持された前記試料と前記切断機構間の移動を駆動するよう作動可能である駆動システム;および
前記試料保持容器に保持された試料の表面の配向を感知するよう作動可能である表面配向センサを含む試料裁断装置。
【請求項2】
前記表面配向センサが二次元的に回転可能である請求項1に記載の試料裁断装置。
【請求項3】
前記表面配向センサが第1軸を中心に回転可能な第1部材、および第2軸を中心に回転可能な第2軸から成り、前記第1軸が第2軸に対して実質的に垂直である請求項2に記載の試料裁断装置。
【請求項4】
前記第1部材がプレートから成り、前記第2部材が前記プレートと結合したフレームを含む請求項3に記載の試料裁断装置。
【請求項5】
前記第1軸を中心にした前記第1部材の回転を感知するように構築された第1感知機構;および
前記第2軸を中心にした前記第2部材の回転を感知するように構築された第2感知機構をさらに含む請求項3に記載の試料裁断装置。
【請求項6】
前記第1部材および前記第2部材が前記表面配向センサと可動に結合し、前記試料が前記第1および第2部材のうち1つ以上に対して力を加えたときに前記試料から遠ざかる方向で移動可能となる請求項3に記載の試料裁断装置。
【請求項7】
前記第1および第2部材が前記試料から遠ざかる方向に向かう移動量を感知するように構築された感知機構をさらに含む請求項6に記載の試料裁断装置。
【請求項8】
前記試料保持容器と結合し、前記試料表面の前記配向を調整することが可能である電動チャック;および
感知した前記配向に基づいて、前記試料裁断装置に前記試料表面の前記配向を自律的に調整させる論理回路:をさらに含む請求項1に記載の試料裁断装置。
【請求項9】
前記論理回路が、前記切断機構と連動している切断平刃に対する前記試料表面の前記配向を前記試料裁断装置に複数回自律的に調整させる論理回路を含み、一方、前記試料表面の前記配向を前期切断平刃と平行にするために、前記試料表面の調整済み配向を前記表面配向センサにより感知させる請求項8に記載の試料裁断装置。
【請求項10】
前記電動チャックの位置を係止し、固定配向の前記試料保持容器により保持された前記試料表面の配向を保持するよう作動可能な前記電動チャックのモータをさらに含む請求項8に記載の試料裁断装置。
【請求項11】
前記表面配向センサを1箇所で前記試料裁断装置と固定で結合させ、前記位置を前記切断機構と実質的に垂直に配列する請求項1に記載の試料裁断装置。
【請求項12】
前記表面配向センサが前記試料裁断装置と可動に結合し、前記試料保持容器に保持された前記試料表面の前記配向を感知するように前記表面配向センサが配置されている第1位置と、前記試料保持容器に保持された前記試料および前記切断機構間の前記移動からさらに遠ざかる第2後退位置との間で前記表面配向センサが移動するよう作動可能な請求項1に記載の試料裁断装置。
【請求項13】
ハンドホイール;
第1シャフトにより前記ハンドホイールと結合し、前記ハンドホイールの角度位置の電気的表示を形成するよう作動可能な第1エンコーダ;
前記駆動システムのモータ;
第2シャフトにより前記駆動システムのモータと結合し、前記駆動システムの前記モータの角度位置の電気的表示を形成するよう作動可能な第2エンコーダ;ならびに
前記第1および第2エンコーダと電気的に結合し、前記ハンドホイールおよび前記モータの前期角度位置の前記電気的表示を受信するよう作動可能であり、前記ハンドホイールの前期角度位置の前記電気的表示に少なくとも部分的に基づいて前記モータを制御するよう作動可能である制御回路をさらに含む請求項1に記載の試料裁断装置。
【請求項14】
前記ハンドホイールの前記角度位置の前記電気的表示の比較まで前記モータが移動しないよう制御できるように前記制御回路が操作可能であり、前記ハンドホイールの位置が前記モータの位置と合致していることを前記モータが示す請求項13に記載の試料裁断装置。
【請求項15】
設定可能な裁断長を指定できる論理回路をさらに含み、前記指定の裁断長のときは比較的緩慢な移動速度で、前記指定の裁断長の移動の直前および直後のうち少なくともどちらか一方では比較的速い移動速度で前記試料を移動させる請求項1に記載の試料裁断装置。
【請求項16】
前記論理回路が、前記試料を保持するために使用する多種のカセットに各々対応する複数の所定の裁断長から前記裁断長をオペレーターが選択できる論理回路を含む、請求項15に記載の試料裁断装置。
【請求項17】
前記論理回路が、複数の多種のカセットの中から1つを選択することによってオペレーターが裁断長を指定できる論理回路を含む、請求項15に記載の試料裁断装置。
【請求項18】
前記試料内に組織を覆い隠し、前記組織を保持するカセットの底部厚に伴う所与の試料厚を前記試料裁断装置が自律的に切り出せる論理回路をさらに含む請求項1に記載の試料裁断装置。
【請求項19】
前記試料裁断装置に制御信号を送信するよう作動可能であり、前記試料裁断装置が前記試料の前記所与の厚さを自律的に切り出せる前記論理回路を使用者に発動させる使用者入力装置を有する制御装置をさらに含む請求項18に記載の試料裁断装置。
【請求項20】
無線制御信号を前記試料裁断装置に送信するよう作動可能な無線制御装置をさらに含む請求項1に記載の試料裁断装置。
【請求項21】
試料裁断装置に保持された試料を、表面配向センサに関連させて位置づける工程;
前記表面配向センサにより、前記試料裁断装置に保持された前記試料の表面の配向を感知する工程;
前記試料表面が、前記試料裁断装置の切断機構と関連させて切断平刃とやや平行になるように、前期試料裁断装置に保持された前記試料表面の前記配向を調整する工程;および
前記試料表面の前記配向を調整した後に前記試料裁断装置により前記試料の切片を作成する工程を含む方法。
【請求項22】
前記表面配向センサにより前記試料表面の前記配向を感知する工程が、前記表面配向センサを二次元的に回転させる工程を含む請求項21に記載の方法。
【請求項23】
前記表面配向センサを二次元的に回転させる工程が、第1軸を中心に第1部材を回転させる工程および第2軸を中心に第2部材を回転させる工程を含み、前記第1軸が前記第2軸に対して実質的に垂直である請求項22に記載の方法。
【請求項24】
前記試料が前記表面配向センサの一部に力を加えて前記試料から遠ざかる方向に前記表面配向センサの一部を移動させる工程;および
前記表面配向センサの一部が前記試料から遠ざかる移動量を感知する工程をさらに含む請求項22に記載の方法。
【請求項25】
前記試料裁断装置が前記試料表面の前記配向を自律的に調整する工程を調整工程に含める請求項21に記載の方法。
【請求項26】
設定可能な裁断長を指定する工程をさらに含み、前記試料の前記切片を作成する工程が、前記指定された裁断長で前記試料から前記切片を切断するときは比較的緩慢な移動速度で前記試料を移動する工程、および前記指定された裁断長での前記移動の直前または直後の少なくとも一方で、比較的速い移動速度で前記試料を移動する工程を含む請求項21に記載の方法。
【請求項27】
複数の切片を自律的に作成する前記試料裁断装置が、組織を保持するカセットの底部を切り出し、組織を露出させることをさらに含む請求項21に記載の方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−202993(P2012−202993A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2012−61804(P2012−61804)
【出願日】平成24年3月19日(2012.3.19)
【出願人】(504462571)サクラ ファインテック ユー.エス.エー., インコーポレイテッド (19)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成24年3月19日(2012.3.19)
【出願人】(504462571)サクラ ファインテック ユー.エス.エー., インコーポレイテッド (19)
【Fターム(参考)】
[ Back to top ]