
試料試験管ラックを取り扱う研究室システム、試料試験管ラックの配列要素およびラックトレイ受承組立体
【課題】特定形状を有する保存ラックであってもオートメーション化された取り扱いを確実にできるようにする、試料試験管ラックを取り扱う研究室システム、試料試験管ラックの配列要素およびラックトレイ受承組立体が開示されている。
【解決手段】試験室の試料試験管ラックを取り扱う試験室システムは、一次ラックPRをつかむ把持部222を備えるロボットアームを有し、取り扱われる一次ラックPRは、第1の端面および第2の端面78を有し、第1の端面は第1の面形状を有し、第2の端面78は第2の面形状を有し、把持部222は、第1の把持アーム226および第2の把持アーム228を有し、第1の把持アーム226は、第1の面形状に相補的な把持面を有し、第2の把持アーム228は、第2の面形状に相補的な把持面を有する。
【解決手段】試験室の試料試験管ラックを取り扱う試験室システムは、一次ラックPRをつかむ把持部222を備えるロボットアームを有し、取り扱われる一次ラックPRは、第1の端面および第2の端面78を有し、第1の端面は第1の面形状を有し、第2の端面78は第2の面形状を有し、把持部222は、第1の把持アーム226および第2の把持アーム228を有し、第1の把持アーム226は、第1の面形状に相補的な把持面を有し、第2の把持アーム228は、第2の面形状に相補的な把持面を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、研究室環境における試料試験管ラックの取り扱いに、具体的には、当該試料試験管を保存区画に保存するために試料試験管ラックを取り扱う研究室装置に、より具体的には、試験管ラックをラック配置領域またはトレイ上に配置する研究室装置に関する。
【背景技術】
【0002】
患者の試料の検査および種々の試験管内診断が実施される、たとえばクリニックの試験所のような研究室においては、(血液、尿などのような)試料を収容した多数の試験管を、注意深く但し効率的な方法で取り扱わなければならない。このために、ここ数年は、そのためのシステムと装置を備えることにより自動化された処理が行なわれてきた。
【0003】
これらの試料試験管を取り扱うときの一態様は、試験管が、たとえば冷蔵装置であってもよいが、保存区画に配置されることに係る。効率よく取り扱うために、試験管は、個別に取り扱われることなく、所謂保存ラックに収容されている。化学的、微生物学的または臨床試験用の分析装置において、ラックは、一般にその後の全ての取り扱い(移動、搬入、搬出)のためにトレイと呼ばれるラックキャリヤに載置される。通常、トレイは、約800mmの操作高さのもとで搬入・搬出される。トレイの手動による取り扱い、とりわけ保存ラックの搬入・搬出は、多数のトレイを取り扱わなければならないときには困難になる。
【0004】
特開第2007−303960号公報は、単数のまたは複数のラックを所望の位置に簡単にセットできるようにすることにより、ラックの転倒事故を低減できるラックトレイおよび複数のセットしたラックをまとめて搬出することができるラックトレイを開示している。このラックトレイは、複数の試料容器を支承している複数のラックを配列させて保持するとともに、ラックが配列方向に移動できるように案内する案内部を有する。案内部は、ラックが装着されたとき、各々のラックの係合部と係合することによりラックを保持する複数の係合保持部を有する。
【0005】
米国特許第5417922号明細書は、識別区域が画成されている前面を有し、ほぼ直線運動をするキャリヤ本体を備え、オートメーション化されている研究室搬送システム内で普通の試料試験管を移動させるための試料キャリヤを開示している。搬送システムのキャリヤを機械的に検出して識別できるようにするために、識別コードが識別区域に付けられている。種々の径および深さの複数の孔がキャリヤの上面に設けられているとともに、キャリヤは、試料試験管の上端がキャリヤの上面から予め決められた高さに位置するようにして、種々の普通の試料試験管を受承できるようになっている。
【発明の概要】
【0006】
本発明は、請求項1および11各々の特徴を備える試料試験管ラックを取り扱う研究室システム、請求項5の特徴を備える配列要素、請求項7および9各々の特徴を備えるラックトレイ受承組立体を提供するものである。
【0007】
本発明によると、研究室の試料試験管ラックを取り扱う研究室システムは、一次ラックをつかむ把持部を備える取り扱い装置を有する。取り扱われる一次ラックは、第1の端面および第2の端面を有しており、第1の端面は第1の面形状を有し、第2の端面は第2の面形状を有し、さらに、第1と第2の面形状は互いに異なっている。把持部は、第1の把持アームおよび第2の把持アームを有し、第1の把持アームは、第1の面形状に相補的な把持面を有し、さらに、第2の把持アームは、第2の面形状に相補的な把持面を有する。
【0008】
このように、本発明によると、特定形状を有する保存ラックであっても、各々が対応する相補的な形状を有する2つの把持アームにより、オートメーション化して取り扱うことができる。この適用されている形状のために、本発明は、ラックのオートメーション化された取り扱いを確実にできるようにする。
【0009】
本発明は、一次ラックを研究室システムの一次ラック配置領域に配列するための配列要素をさらに提供する。上記のように、配列される一次ラックは、第1の端面および第2の端面を有しており、第1の端面は第1の面形状を有し、第2の端面は第2の面形状を有する。配列要素は、底部分、第1の縦側面および第2の縦側面を有し、第1の縦側面は第1の面形状に相補的であり、また、第2の縦側面は第2の面形状に相補的であるが、底部分は、配列要素を一次ラック配置領域に、他の配列要素と同一の向きになるよう配置するための鼻形状の配列要素を有する。
【0010】
このように、本発明によると、特定形状の一次ラックをオートメーション化して取扱う操作は、一次ラックをラック配置領域に(位置合せを行なって)確実・正確に配置することにより、より容易に行うことが可能になる。
【0011】
その他の特徴および実施形態は、本明細書および添付図面から明白になる。
【0012】
上述した特徴および以下に説明する内容は、特定した組み合わせだけではなく、その他の組み合わせにおいてまたは単独で、本開示の範囲から逸脱することなく用いることができると理解される。本発明の開示内容は、また、開示した装置およびシステムの操作に付随する方法も含み、また、本明細書は、プログラムコーディング手段を備えるコンピュータプログラムも含むものであるが、プログラムコーディング手段は、コンピュータプログラムをコンピュータまたは制御ユニット上で走らせるとき、本発明の方法を実施するために好適である。コンピュータプログラム自体およびコンピュータにより読み取る可能なメディアの記憶内容についても特許請求を行なう。
【0013】
種々の形態が、例としての実施形態を用いて図面に模式的に示され、また、図面を参照して以下に詳細に説明される。本記載は、本開示の範囲を決して制限するものではなく、選好実施形態の単なる例示であると了解されるものとする。
【図面の簡単な説明】
【0014】
【図1】本発明の研究室システムを備える研究所装置の斜視図である。
【図2】本発明の研究室システムの搬入一次ラックを取り扱う一次ラック取扱器領域の平面図である。
【図3】図2の一次ラック取扱器領域の斜視図である。
【図4】図2の一次ラック取扱器領域のロボットアームの把持部を後方から見たときの斜視図である。
【図5】図4の把持部を前方から見たときの斜視図である。
【図6】図2および図3の一次ラック取扱器領域の詳細な斜視図である。
【図7】図6の細部の平面図である。
【図8】本発明の配列要素を上方から見たときの第1の斜視図である。
【図9】図8の配列要素を上方から見たときの第2の斜視図である。
【図10】図8の配列要素の底部分の斜視図である。
【図11】本発明による境界機構を有する一次ラックトレイ受承組立体の斜視図である。
【図12】本発明の一次ラックトレイ受承組立体の別の斜視図である。
【図13】図12の一次ラックトレイ受承組立体のさらに別の斜視図である。
【図14】図12の一次ラックトレイ受承組立体の平面図である。
【発明を実施するための形態】
【0015】
ここでいくつかの実施形態を詳細に参照して説明するが、その例は、添付図面に示されている。同一の参照符号が、全図面を通して同一のまたは類似の構成要素を示すために用いられている。
【0016】
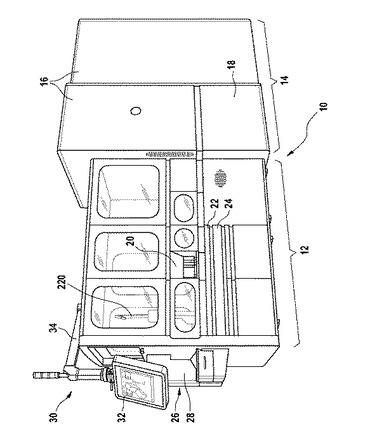
図1は、本発明の研究室システムを備える研究所装置10の斜視図である。この研究所装置10は、総合研究所分析システムの一部を構成する所謂搬入・搬出モジュール(SRM)である。搬入・搬出モジュールは、一次ラック取扱部12(図1においては左側)および冷蔵または保存区画14(図1においては右側)を有する。2つの部分12、14のあいだには、ラックが一次ラック取扱部12から冷蔵または冷却区画14に搬入されるおよび(搬出の場合には)反対方向に移送される搬入・搬出インターフェイス(図示せず)が配置されている。この搬入・搬出インターフェイスは、ゲートなどのように構成されていてもよい。
【0017】
保存区画14は冷蔵庫16を備える。本発明でいう所の保存区画は、好ましくは保存ラックに収容されている複数の試料試験管を保存できる種々のサイズのキャビネットである。それは、冷蔵庫内の試験管の周辺温度を室温未満、場合によっては18℃未満、さらに、場合によっては10℃未満に保持できる適切な調節装置を備える。
【0018】
保存区画16は、多数の試料試験管ラックを保存するための複数の棚をその内部に有する。本発明によると、保存区画に搬入された試料試験管ラックは、所謂保存ラックである。このことは、本発明の形状基準を満たす一次ラック(種々の搬入ラック)に収容されている全ての試験管は、各々の一次ラックから取り出されて、保存区画14に搬入する前に適切な保存ラックに改めて仕分けされることを意味する。保存区画は、1人または2人の人がドア(図示せず)を通って保存区画14内に入ることができるほどの大きさである。ドアが開いたときには、安全スイッチ回路が、(ロボットアームもしくはその他の移送または搬送システムのような)全ての動作中のシステムを、たとえばニュートラルまたはホームポジションに切り換えて確実に停止させる。一次ラックは、標準形に近い形状の単列配置のラックであり、そのために、複数の異なる研究室システムにおいて容易に取り扱うことができるが、二次ラック、とりわけ保存ラックは、複数列ラック(10を超える位置、13および14の位置を有する3列式)である。したがって、二次ラックは、とりわけ保存を目的とするときには、安定性がより高くなり、転倒する可能性が小さくなる。
【0019】
また、保存区画14は処理装置18を有する。処理装置18は、保存区画14を処理装置18から隔離する壁の内部開口(図示せず)を介して保存区画14に連結されている。有効期限(保存期限)が経過した試料試験管は、自動的にこの開口を通り処理装置18により廃棄される。
【0020】
一次ラック取扱部12は、オペレータがラック取扱部の動作状況を直接見ることができるよう窓が設けられた複数の外壁を備えるハウジングを有する。一次ラック取扱部12は、外壁の1つに開口20を有し、そこを介して、一次ラックを搬入・搬出モジュール10に挿入することができる。開口20は、(図1において、窓の1つを通して見ることができる)少なくとも1つのロボットアーム220を備える一次ラック取扱領域210に通じている(図2参照)。開口20は、引き戸または回転式扉(図示せず)により閉鎖できる。
【0021】
一次ラック取扱部12は、空の一次ラックおよび/またはエラー表示の試料試験管を収容している一次ラックおよび/または少なくとも1つの搬出試料試験管を収容しているラックを搬入・搬出モジュール10から取り出すことができる引き出し22、24をさらに有する。
【0022】
また、一次ラック取扱部12は、試験管用蓋の供給タンク28を備えるキャッピン部26を有する。
【0023】
搬入・搬出モジュール10は、また、多関節アーム34の端部にタッチスクリーンモニタ32形態のマン・マシン・インターフェース(MMI)30を有する。
【0024】
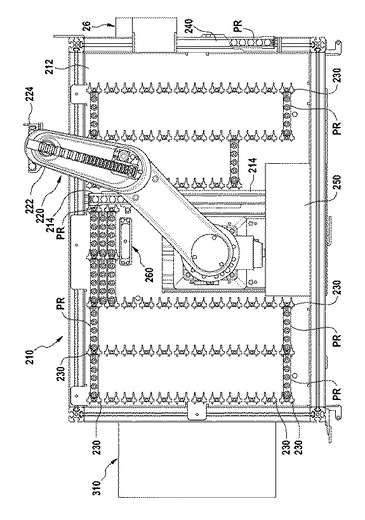
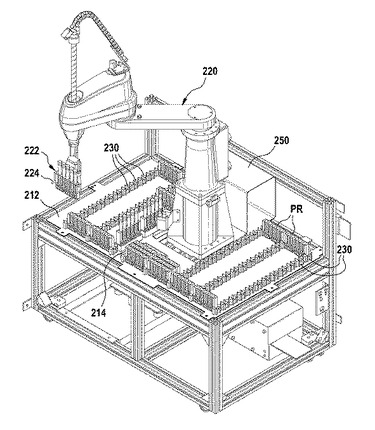
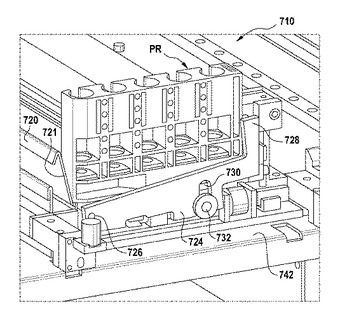
図2は、本発明の研究室システムの一次ラック取扱領域210の平面図であり、図3は、その斜視図である。一次ラック取扱領域210は、図1の一次ラック取扱部12の内部に基盤212を有する。一次ラック取扱領域210は、本質的には基盤212の中央にまたは少なくとも一次ラック取扱領域210内の少なくとも全ての部位に届くことができる位置に装着された第1のロボットアーム220をさらに有する。この目的のためには、たとえば4軸、4自由度のSCARA型ロボットのような周知で好適なロボットのいずれをも用いることができる。ロボットアーム220は、その端部に、取り扱うラックを確実につかむことができるようになっている把持部222を有する。
【0025】
基盤212には、試料試験管(たとえば5つの試料試験管)を収容する搬入一次ラックPRを、基盤212上に同様に配置された画像解析機250に搬送するためのコンベヤ214が設けられている。
【0026】
さらに、複数の配列要素230が、基盤212に設けられている。配列要素230は、一次ラックPRを、所望の位置に合わせてまたはロボットアーム220の把持部222の向きに対応する向きに保持できるように構成されている。処理の全ての段階において、(試料試験管の位置を何時も間違いなく特定できるよう)一次ラックPRの適切な向きを確保するために、一次ラックは、開口20を介してコンベヤ214に直接搬入するのではなく、ロボットアーム220の把持部222により持ち上げてコンベヤ214に載置される。このために、搬入ラックの受入部(図示せず)が設けられており、ロボットアームは、コンベヤ214に載置するために、搬入ラックをそこから取り出すようになっている。
【0027】
コンベヤ214は一次ラックを画像解析機250に搬入し、そこで、一次ラックの試料試験管は、その形状についてのパラメータが分析される。試料試験管の各々の形状について判定されたパラメータは、予め決められた基準形状と比較されて、試料試験管が、システムに適合するか否かが判定される。分析される、形状についてのパラメータの1つは試料試験管の蓋の存在であり、また、分析される、形状についてのもう1つのパラメータは試験管の径である。
【0028】
試料試験管が蓋を有しないことが見出されたときには、一次ラックまたはそこに収容されているその他のいずれの試料試験管に対するさらなる処理を行なう前に、一次ラック全体が、キャッピング部26(図3には示さず)に送られる。このために、第1のロボットアーム220は、蓋がないと判別された試料試験管を再度閉蓋するために、試料試験管を収容している一次ラックをキャッピング部26に搬入するコンベヤ260に載置する。試料試験管に対する閉蓋が改めて行われた後に、一次ラックは、通常の処理に戻される。場合によっては、代替として、今度は全ての試料試験管に蓋が取り付けられていて、さらなる処理を実施できることを確認するために、一次ラックを画像解析機250に送り返すこともできる。
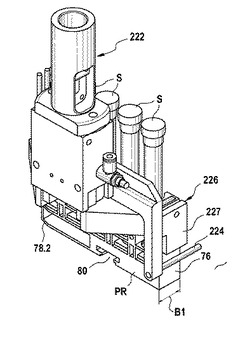
【0029】
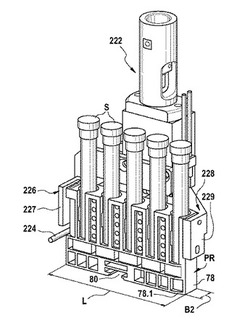
図4および図5は、ロボットアーム220の把持部222の拡大図を示す。把持部222は、第1のアーム226および第2のアーム228を有する。2つのアーム226、228は、トングの原理に基づいて機能する。即ち、あいだに一次ラックを把持するために相対移動をすることができる。2つのアーム226、228間の距離は、一次ラックをその長手方向において把持することができる大きさ、換言すると、2つのアームの把持位置間の距離は、一次ラックPRの長さLより僅かに大きくなっている。
【0030】
一次ラックPRの各々は、第1の端面76および第2の端面78を有しており、第1の端面76は第1の面形状を有し、第2の端面78は第2の面形状を有する。図示した実施形態において、第1の端面76は平面であり、第2の端面78は2つの傾斜端部78.1、78.2を有する。このように、また、既に上述したように、一次ラックPRは、その端面の形状のために、試料試験管の位置を間違いなく特定できる向きになる。
【0031】
一次ラックを適切かつ安全に把持できるようにするために、把持部222の2つのアーム226、228の各々は、相補的な表面を有する。即ち、第1の把持アーム226は、第1の面形状に相補的である把持面を有し、第2の把持アームは、第2の面形状に相補的である把持面を有する。
【0032】
さらに、2つのアーム226、228は、一次ラックを水平面内で挟んで把持できるよう水平のトングとして形成されている。これにより、ラックが上方から取り扱われることがないために、高過ぎるまたはラック開口に完全に挿入されていない試料試験管を圧壊する危険を回避することができる。また、これにより、一次ラックを水平移動させて、棚のトレイに挿着することが可能となる(図12参照)。
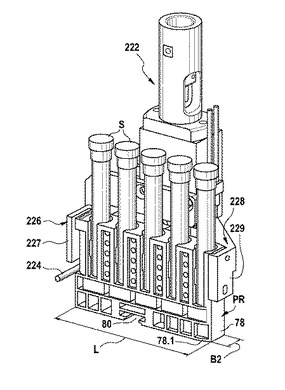
【0033】
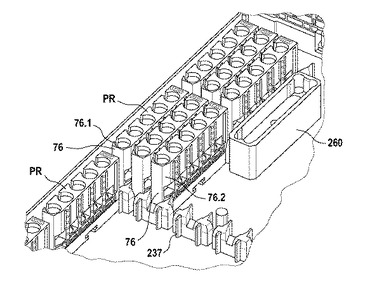
図6および図7に示したように、複数のラックが隣接して配置されているとき、一次ラックを上方から把持することができるようにするために、把持部222の2つのアーム226、228の各々は、一次ラックPRの端面76、78各々の上部を把持して、それを持ち上げることができる下向きに突出する延長部227、229を有する。一次ラックPRは、次いで中間のまたは一時停止の位置260に配置され、把持部222は、一次ラックPRを停止位置260で離し、ロボットアーム220が把持部222を僅かに下げ、次いで、2つのアームが、閉じることにより一次ラックを全把持面によって完全に把持することができる(図5参照)。このようにして、一次ラックPRは、たとえ把持が「後方」から行われる場合にも、たとえば基盤212のラック配置領域に、スペースを無駄にすることなく隣接させて保存することが可能である。
【0034】
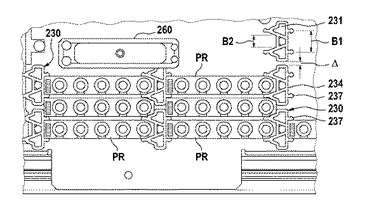
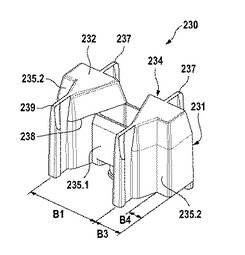
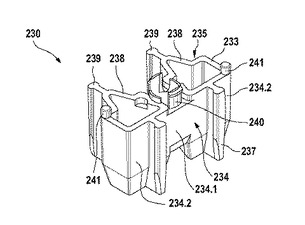
図8〜10は、配列要素230の拡大図を示す。配列要素230は、上端面232、底面233、第1の縦側面234、第2の縦側面235および第1と第2の側端面236を備えるほぼ矩形の基部231を有する。
【0035】
配列要素230の第1の縦側面234は、ほぼ平らな表面であり、第1の縦側面234を中央主要部234.1および隣接した2つの小さい外側部分234.2に分割する2つの垂直な突出仕切り237が設けられている。中央主要部234.1の幅B1は、一次ラックPRの平坦な第1の端面76の幅にほぼ等しく、一次ラックのこの端面を2つの垂直な突出仕切り237のあいだに受承できるようになっている。2つの小さい外側部分234.2の幅B3の各々は、(B1−Δ)/2に等しく、Δは、ラック配置領域、即ち基盤212に配置されたときの、隣接する2つの配列要素230間の間隙である。本発明のこの形状により、一次ラックPRの端面76も、また、隣接する配列要素230の垂直な突出仕切り237のあいだに受承することができるようになっており、これにより、一次ラックを保存するまたは一時停止させるために利用可能なスペースを最適な状態で活用することが可能になる。
【0036】
配列要素230の第2の縦側面235は、反対側の第1の縦側面234の2つの垂直な突出仕切り237と対称形に、断面がほぼ三角形で、第2の中央主要部235.1および2つの小さい第2の外側部分235.2を画成する2つの突出部238を有する。突出部238の各々の先端部に、反対側の第1の縦側面234の2つの垂直な突出仕切り237に類似しているとともに、それらの対称位置に垂直突起239が設けられている。したがって、この2つの垂直突起239間の距離は、反対側の第1の中央主要部234.1の幅B1に等しく、2つの突出部238のあいだの第2の中央主要部の幅B2は、一次ラックPRの2つの傾斜面を有する第2の端面78の幅にほぼ等しく、一次ラックのこの傾斜した端面は、2つの突出部238のあいだに受承できるようになっている。ここでも、また、2つの第2の外側部分235.2の各々の幅B4は、幅B2から2つの配列要素間の間隙の半分を際引いた値の半分に等しい、即ちB4=(B2−Δ)/2である。
【0037】
配列要素230の上端面232は、一次ラックの突起237、239と突出部238のあいだへの挿入を容易にするために傾斜縁を有していてもよい。
【0038】
配列要素230は、その底部分233の中央に設けられたクリップ様の位置決め要素240を底部分233に有する。それは、互いに対角線上に配置された2つの位置決めピン241をさらに有する。
【0039】
図11〜14は、本発明の一次ラックトレイ受承組立体710を示す。
【0040】
一次ラックトレイ受承組立体710は、滑動レール714に沿って移動可能な受承滑動部712を有する。滑動レール714は、一次ラックトレイ受承組立体の長さ方向に沿って延在しており、長さ方向の大きさは、一次ラックトレイ720を収容できる長さである。
【0041】
受承滑動部712は、一次ラックトレイを受承して、それと固定係合できるように構成されている。このために、受承滑動部712は、受承・固定手段716、718、722、即ち一次ラックトレイ720の対応する突起(図示せず)に係合できるようになっている、ほぼ平坦な上面の2つの開口716、718を有する。開口716の少なくとも1つには、受承滑動部712に挿入されたとき、一次ラックトレイ720の突起の対応する凹みにスナップ嵌合するようになっている引込み式ボルト722が装着されている。引込み式ボルト722のスナップ嵌合の方向は、たとえば一次ラックトレイ720の挿入方向に直交している。
【0042】
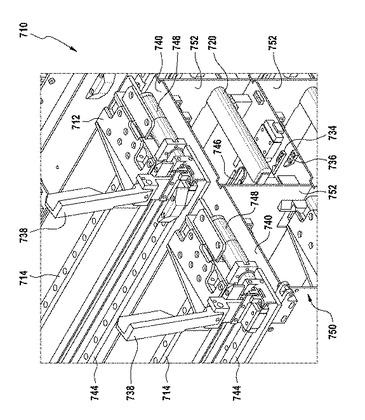
空の受承滑動部712が、一次ラックトレイ受承組立体の長手方向の1つの端部740に配置されている(図12参照)。この位置は、待機位置と呼んでもよい。一次ラックトレイ720を受承滑動部712に挿入して取り付けが終わると、受承滑動部712は、挿着された一次ラックトレイ720とともに滑動レール714に沿って押され、待機位置から一次ラックトレイ受承組立体の長さ方向の反対側端部742に移動させられる。
【0043】
一次ラックトレイ720を一次ラックトレイ受承組立体に挿着するとき、枢着された境界ゲート738は、下向きに回動する。境界ゲート738は境界レール744に摺動可能に連結されていて、境界レール744に沿って長さ方向に移動することができる。この移動は、電動モータ748により案内されていて、一次ラックトレイ720に収容された一次ラックの列に制御された押進力を加えることができるようになっている。この移動は、列を組み直し、また、次の一次ラックが間違いなく搬出位置に来るようにするために、たとえば一次ラックが一次ラックトレイ受承組立体の反対側端部742において一次ラックトレイ720から搬出された後に行われる。
【0044】
一次ラックトレイ720の一方の端部から他方の端部への移動特性および安定性を改善するために、一次ラックトレイ720は、一次ラックトレイ720の長さ方向に延在するラックレール746を有し、ラックレール746は、一次ラックの底部分に設けられた凹み80に摺動可能に係合するように構成されている。
【0045】
本発明の受承滑動部712は、境界要素724をさらに有してもよく、境界要素724は、第1の端部726で受承滑動部712の縦側面に枢動可能に連結されているとともに、一次ラックトレイ720の前縁721を横切って上方傾斜位置を取るように付勢されているために、一次ラックトレイ720のラックPRが挿着および移動の操作中並びにその後の取り扱い中に前縁721から脱落することを阻止できる。境界要素724は、受承滑動部712の案内ピン732が挿着される案内溝730を備える。
【0046】
境界要素730は、第1の端部726の枢軸を中心にして、また、案内溝730に沿う向きに付勢力に抗して押下することができる。付勢力に抗して押下したとき、一次ラックトレイ720の前縁721は自由状態になり、最初に配置したラックPRを容易に取り出すことが可能になる。境界要素724は、解放されたとき、即ち押下する力が取り除かれたとき、付勢力のために上向きに再度跳ね上がって、一次ラックトレイ720の前縁721を再度閉鎖する。
【0047】
境界要素724を押下する操作を容易にするために、境界要素724は、反対側の第2の端部に駆動レバーとしての機能を備える垂直延長部728を有する。ロボットアーム220による自動化された境界要素724の押下は、ロボットアーム220の把持部222から突出する対応したボルト224により実施することができる。ボルト224は、把持部222によりラックPRの前端76をつかんだとき把持部222の下方でほぼ水平に、また、一次ラックPRの外周より外側まで突出するようにして、即ちボルト224は一次ラックPRの縦軸に直交して突出する形態で把持部222に取り付けられている(図4と図5を参照)。
【0048】
ロボットアーム220は、一次ラックトレイ720に最初に配置されたラックPRを持ち上げようとするとき、把持部222をラックPRに向けて下げて、ボルト224をレバー728の上端に接触させる。把持部222の下降は継続するために、レバー728に加えられている力のために、境界要素724が押下される。次いで、把持アーム226、228がラックPRをつかみ、さらに、ラックPRは、水平移動して一次ラックトレイ720から取り出される(このことは、境界要素724が押下されているために可能になる)。ボルト224は、ラックPRの外周より外側まで突出しているために、ラックPRが一次ラックトレイから完全に取り出されるまで、レバー728と長い時間接触を続け、これにより、境界要素724は、一次ラックトレイが取り外されるときになって再度跳ね上がることができる。
【0049】
一次ラックトレイ720を一次ラックトレイ受承組立体から取り外す場合には、境界ゲート738を持ち上げて一次ラックトレイ720を一次ラックトレイ受承組立体710から引き出し、さらに、受承滑動部712は滑動レール714に沿って戻される。受承滑動部がその待機位置に復帰させられたとき、引込み式ボルト(722)が、付勢力に抗して後退して一次ラックトレイ(720)の凹みから離脱する。より詳しく述べると、受承滑動部712が740のその待機位置に達すると、引込み式ボルト722の付勢機構が、一次ラックトレイ受承組立体の底の傾斜要素736に当接し、これにより、ボルト722が付勢力に抗して後退して、受承滑動部712の一次ラックトレイ720のロックが解除されるために、一次ラックトレイ720を取り外すことが可能になる。また、移動時の受承滑動部712を固定するために、掛け金要素734を設けてもよい。掛け金要素734は、ボルト722を必ずしも後退させることなく受承滑動部712の移動を阻止できるようにするために、傾斜要素736の少し前方に配置することが好ましい。受承滑動部712が傾斜要素736に向けてさらに引き戻されたときにだけボルト722が後退して、一次ラックトレイ720が解放されるようになっている。
【0050】
また、図12は、複数の棚区画752を備えるラック用棚システム750を示しており、棚区画の各々は、本発明の、上述したような一次ラックトレイ受承組立体を有する。本発明のラック用棚システム750は、限られたスペースしか利用できない場合にも、研究室の試料試験管ラックを多数取り扱うことを可能にする。ラック用棚システム750は、本明細書において説明しかつ開示した、一次ラックPRを水平把持できるロボット把持部222と組み合わせたとき、とりわけ有効に動作するが、それは、把持部222が一次ラックPRを棚のラック用位置に水平移動により挿入、即ち挿着できる可能性をも与えてくれるからである(これは、ラックを上方からつかむ把持部の場合には不可能である)。この搬入方法は、上述した、ラックを一次ラックトレイから搬出する方法にも同様に当てはまる。
【0051】
本発明の一態様によると、上部または最上部の棚式トレイ受承組立体が、(ロボットアーム220により)搬出される一次ラックが収容されたラックトレイを受承するが、下方の棚区画は、一次ラックを収容することになっている空のラックトレイを受承する。
【符号の説明】
【0052】
76 第1の端面
78 第2の端面
78.1 傾斜端部
212 ラック配置領域
230 配列要素
233 底部分
234 第1の縦側面
235 第2の縦側面
240 位置決め要素
712 受承滑動部
714 滑動レール
716、718、722 受承・固定手段
720 ラックトレイ
721 前縁
722 引込み式ボルト
724 境界要素
726 第1の端部
740 一方の端部
742 反対側の端部
750 ラック用棚
752 棚区画
【技術分野】
【0001】
本発明は、研究室環境における試料試験管ラックの取り扱いに、具体的には、当該試料試験管を保存区画に保存するために試料試験管ラックを取り扱う研究室装置に、より具体的には、試験管ラックをラック配置領域またはトレイ上に配置する研究室装置に関する。
【背景技術】
【0002】
患者の試料の検査および種々の試験管内診断が実施される、たとえばクリニックの試験所のような研究室においては、(血液、尿などのような)試料を収容した多数の試験管を、注意深く但し効率的な方法で取り扱わなければならない。このために、ここ数年は、そのためのシステムと装置を備えることにより自動化された処理が行なわれてきた。
【0003】
これらの試料試験管を取り扱うときの一態様は、試験管が、たとえば冷蔵装置であってもよいが、保存区画に配置されることに係る。効率よく取り扱うために、試験管は、個別に取り扱われることなく、所謂保存ラックに収容されている。化学的、微生物学的または臨床試験用の分析装置において、ラックは、一般にその後の全ての取り扱い(移動、搬入、搬出)のためにトレイと呼ばれるラックキャリヤに載置される。通常、トレイは、約800mmの操作高さのもとで搬入・搬出される。トレイの手動による取り扱い、とりわけ保存ラックの搬入・搬出は、多数のトレイを取り扱わなければならないときには困難になる。
【0004】
特開第2007−303960号公報は、単数のまたは複数のラックを所望の位置に簡単にセットできるようにすることにより、ラックの転倒事故を低減できるラックトレイおよび複数のセットしたラックをまとめて搬出することができるラックトレイを開示している。このラックトレイは、複数の試料容器を支承している複数のラックを配列させて保持するとともに、ラックが配列方向に移動できるように案内する案内部を有する。案内部は、ラックが装着されたとき、各々のラックの係合部と係合することによりラックを保持する複数の係合保持部を有する。
【0005】
米国特許第5417922号明細書は、識別区域が画成されている前面を有し、ほぼ直線運動をするキャリヤ本体を備え、オートメーション化されている研究室搬送システム内で普通の試料試験管を移動させるための試料キャリヤを開示している。搬送システムのキャリヤを機械的に検出して識別できるようにするために、識別コードが識別区域に付けられている。種々の径および深さの複数の孔がキャリヤの上面に設けられているとともに、キャリヤは、試料試験管の上端がキャリヤの上面から予め決められた高さに位置するようにして、種々の普通の試料試験管を受承できるようになっている。
【発明の概要】
【0006】
本発明は、請求項1および11各々の特徴を備える試料試験管ラックを取り扱う研究室システム、請求項5の特徴を備える配列要素、請求項7および9各々の特徴を備えるラックトレイ受承組立体を提供するものである。
【0007】
本発明によると、研究室の試料試験管ラックを取り扱う研究室システムは、一次ラックをつかむ把持部を備える取り扱い装置を有する。取り扱われる一次ラックは、第1の端面および第2の端面を有しており、第1の端面は第1の面形状を有し、第2の端面は第2の面形状を有し、さらに、第1と第2の面形状は互いに異なっている。把持部は、第1の把持アームおよび第2の把持アームを有し、第1の把持アームは、第1の面形状に相補的な把持面を有し、さらに、第2の把持アームは、第2の面形状に相補的な把持面を有する。
【0008】
このように、本発明によると、特定形状を有する保存ラックであっても、各々が対応する相補的な形状を有する2つの把持アームにより、オートメーション化して取り扱うことができる。この適用されている形状のために、本発明は、ラックのオートメーション化された取り扱いを確実にできるようにする。
【0009】
本発明は、一次ラックを研究室システムの一次ラック配置領域に配列するための配列要素をさらに提供する。上記のように、配列される一次ラックは、第1の端面および第2の端面を有しており、第1の端面は第1の面形状を有し、第2の端面は第2の面形状を有する。配列要素は、底部分、第1の縦側面および第2の縦側面を有し、第1の縦側面は第1の面形状に相補的であり、また、第2の縦側面は第2の面形状に相補的であるが、底部分は、配列要素を一次ラック配置領域に、他の配列要素と同一の向きになるよう配置するための鼻形状の配列要素を有する。
【0010】
このように、本発明によると、特定形状の一次ラックをオートメーション化して取扱う操作は、一次ラックをラック配置領域に(位置合せを行なって)確実・正確に配置することにより、より容易に行うことが可能になる。
【0011】
その他の特徴および実施形態は、本明細書および添付図面から明白になる。
【0012】
上述した特徴および以下に説明する内容は、特定した組み合わせだけではなく、その他の組み合わせにおいてまたは単独で、本開示の範囲から逸脱することなく用いることができると理解される。本発明の開示内容は、また、開示した装置およびシステムの操作に付随する方法も含み、また、本明細書は、プログラムコーディング手段を備えるコンピュータプログラムも含むものであるが、プログラムコーディング手段は、コンピュータプログラムをコンピュータまたは制御ユニット上で走らせるとき、本発明の方法を実施するために好適である。コンピュータプログラム自体およびコンピュータにより読み取る可能なメディアの記憶内容についても特許請求を行なう。
【0013】
種々の形態が、例としての実施形態を用いて図面に模式的に示され、また、図面を参照して以下に詳細に説明される。本記載は、本開示の範囲を決して制限するものではなく、選好実施形態の単なる例示であると了解されるものとする。
【図面の簡単な説明】
【0014】
【図1】本発明の研究室システムを備える研究所装置の斜視図である。
【図2】本発明の研究室システムの搬入一次ラックを取り扱う一次ラック取扱器領域の平面図である。
【図3】図2の一次ラック取扱器領域の斜視図である。
【図4】図2の一次ラック取扱器領域のロボットアームの把持部を後方から見たときの斜視図である。
【図5】図4の把持部を前方から見たときの斜視図である。
【図6】図2および図3の一次ラック取扱器領域の詳細な斜視図である。
【図7】図6の細部の平面図である。
【図8】本発明の配列要素を上方から見たときの第1の斜視図である。
【図9】図8の配列要素を上方から見たときの第2の斜視図である。
【図10】図8の配列要素の底部分の斜視図である。
【図11】本発明による境界機構を有する一次ラックトレイ受承組立体の斜視図である。
【図12】本発明の一次ラックトレイ受承組立体の別の斜視図である。
【図13】図12の一次ラックトレイ受承組立体のさらに別の斜視図である。
【図14】図12の一次ラックトレイ受承組立体の平面図である。
【発明を実施するための形態】
【0015】
ここでいくつかの実施形態を詳細に参照して説明するが、その例は、添付図面に示されている。同一の参照符号が、全図面を通して同一のまたは類似の構成要素を示すために用いられている。
【0016】
図1は、本発明の研究室システムを備える研究所装置10の斜視図である。この研究所装置10は、総合研究所分析システムの一部を構成する所謂搬入・搬出モジュール(SRM)である。搬入・搬出モジュールは、一次ラック取扱部12(図1においては左側)および冷蔵または保存区画14(図1においては右側)を有する。2つの部分12、14のあいだには、ラックが一次ラック取扱部12から冷蔵または冷却区画14に搬入されるおよび(搬出の場合には)反対方向に移送される搬入・搬出インターフェイス(図示せず)が配置されている。この搬入・搬出インターフェイスは、ゲートなどのように構成されていてもよい。
【0017】
保存区画14は冷蔵庫16を備える。本発明でいう所の保存区画は、好ましくは保存ラックに収容されている複数の試料試験管を保存できる種々のサイズのキャビネットである。それは、冷蔵庫内の試験管の周辺温度を室温未満、場合によっては18℃未満、さらに、場合によっては10℃未満に保持できる適切な調節装置を備える。
【0018】
保存区画16は、多数の試料試験管ラックを保存するための複数の棚をその内部に有する。本発明によると、保存区画に搬入された試料試験管ラックは、所謂保存ラックである。このことは、本発明の形状基準を満たす一次ラック(種々の搬入ラック)に収容されている全ての試験管は、各々の一次ラックから取り出されて、保存区画14に搬入する前に適切な保存ラックに改めて仕分けされることを意味する。保存区画は、1人または2人の人がドア(図示せず)を通って保存区画14内に入ることができるほどの大きさである。ドアが開いたときには、安全スイッチ回路が、(ロボットアームもしくはその他の移送または搬送システムのような)全ての動作中のシステムを、たとえばニュートラルまたはホームポジションに切り換えて確実に停止させる。一次ラックは、標準形に近い形状の単列配置のラックであり、そのために、複数の異なる研究室システムにおいて容易に取り扱うことができるが、二次ラック、とりわけ保存ラックは、複数列ラック(10を超える位置、13および14の位置を有する3列式)である。したがって、二次ラックは、とりわけ保存を目的とするときには、安定性がより高くなり、転倒する可能性が小さくなる。
【0019】
また、保存区画14は処理装置18を有する。処理装置18は、保存区画14を処理装置18から隔離する壁の内部開口(図示せず)を介して保存区画14に連結されている。有効期限(保存期限)が経過した試料試験管は、自動的にこの開口を通り処理装置18により廃棄される。
【0020】
一次ラック取扱部12は、オペレータがラック取扱部の動作状況を直接見ることができるよう窓が設けられた複数の外壁を備えるハウジングを有する。一次ラック取扱部12は、外壁の1つに開口20を有し、そこを介して、一次ラックを搬入・搬出モジュール10に挿入することができる。開口20は、(図1において、窓の1つを通して見ることができる)少なくとも1つのロボットアーム220を備える一次ラック取扱領域210に通じている(図2参照)。開口20は、引き戸または回転式扉(図示せず)により閉鎖できる。
【0021】
一次ラック取扱部12は、空の一次ラックおよび/またはエラー表示の試料試験管を収容している一次ラックおよび/または少なくとも1つの搬出試料試験管を収容しているラックを搬入・搬出モジュール10から取り出すことができる引き出し22、24をさらに有する。
【0022】
また、一次ラック取扱部12は、試験管用蓋の供給タンク28を備えるキャッピン部26を有する。
【0023】
搬入・搬出モジュール10は、また、多関節アーム34の端部にタッチスクリーンモニタ32形態のマン・マシン・インターフェース(MMI)30を有する。
【0024】
図2は、本発明の研究室システムの一次ラック取扱領域210の平面図であり、図3は、その斜視図である。一次ラック取扱領域210は、図1の一次ラック取扱部12の内部に基盤212を有する。一次ラック取扱領域210は、本質的には基盤212の中央にまたは少なくとも一次ラック取扱領域210内の少なくとも全ての部位に届くことができる位置に装着された第1のロボットアーム220をさらに有する。この目的のためには、たとえば4軸、4自由度のSCARA型ロボットのような周知で好適なロボットのいずれをも用いることができる。ロボットアーム220は、その端部に、取り扱うラックを確実につかむことができるようになっている把持部222を有する。
【0025】
基盤212には、試料試験管(たとえば5つの試料試験管)を収容する搬入一次ラックPRを、基盤212上に同様に配置された画像解析機250に搬送するためのコンベヤ214が設けられている。
【0026】
さらに、複数の配列要素230が、基盤212に設けられている。配列要素230は、一次ラックPRを、所望の位置に合わせてまたはロボットアーム220の把持部222の向きに対応する向きに保持できるように構成されている。処理の全ての段階において、(試料試験管の位置を何時も間違いなく特定できるよう)一次ラックPRの適切な向きを確保するために、一次ラックは、開口20を介してコンベヤ214に直接搬入するのではなく、ロボットアーム220の把持部222により持ち上げてコンベヤ214に載置される。このために、搬入ラックの受入部(図示せず)が設けられており、ロボットアームは、コンベヤ214に載置するために、搬入ラックをそこから取り出すようになっている。
【0027】
コンベヤ214は一次ラックを画像解析機250に搬入し、そこで、一次ラックの試料試験管は、その形状についてのパラメータが分析される。試料試験管の各々の形状について判定されたパラメータは、予め決められた基準形状と比較されて、試料試験管が、システムに適合するか否かが判定される。分析される、形状についてのパラメータの1つは試料試験管の蓋の存在であり、また、分析される、形状についてのもう1つのパラメータは試験管の径である。
【0028】
試料試験管が蓋を有しないことが見出されたときには、一次ラックまたはそこに収容されているその他のいずれの試料試験管に対するさらなる処理を行なう前に、一次ラック全体が、キャッピング部26(図3には示さず)に送られる。このために、第1のロボットアーム220は、蓋がないと判別された試料試験管を再度閉蓋するために、試料試験管を収容している一次ラックをキャッピング部26に搬入するコンベヤ260に載置する。試料試験管に対する閉蓋が改めて行われた後に、一次ラックは、通常の処理に戻される。場合によっては、代替として、今度は全ての試料試験管に蓋が取り付けられていて、さらなる処理を実施できることを確認するために、一次ラックを画像解析機250に送り返すこともできる。
【0029】
図4および図5は、ロボットアーム220の把持部222の拡大図を示す。把持部222は、第1のアーム226および第2のアーム228を有する。2つのアーム226、228は、トングの原理に基づいて機能する。即ち、あいだに一次ラックを把持するために相対移動をすることができる。2つのアーム226、228間の距離は、一次ラックをその長手方向において把持することができる大きさ、換言すると、2つのアームの把持位置間の距離は、一次ラックPRの長さLより僅かに大きくなっている。
【0030】
一次ラックPRの各々は、第1の端面76および第2の端面78を有しており、第1の端面76は第1の面形状を有し、第2の端面78は第2の面形状を有する。図示した実施形態において、第1の端面76は平面であり、第2の端面78は2つの傾斜端部78.1、78.2を有する。このように、また、既に上述したように、一次ラックPRは、その端面の形状のために、試料試験管の位置を間違いなく特定できる向きになる。
【0031】
一次ラックを適切かつ安全に把持できるようにするために、把持部222の2つのアーム226、228の各々は、相補的な表面を有する。即ち、第1の把持アーム226は、第1の面形状に相補的である把持面を有し、第2の把持アームは、第2の面形状に相補的である把持面を有する。
【0032】
さらに、2つのアーム226、228は、一次ラックを水平面内で挟んで把持できるよう水平のトングとして形成されている。これにより、ラックが上方から取り扱われることがないために、高過ぎるまたはラック開口に完全に挿入されていない試料試験管を圧壊する危険を回避することができる。また、これにより、一次ラックを水平移動させて、棚のトレイに挿着することが可能となる(図12参照)。
【0033】
図6および図7に示したように、複数のラックが隣接して配置されているとき、一次ラックを上方から把持することができるようにするために、把持部222の2つのアーム226、228の各々は、一次ラックPRの端面76、78各々の上部を把持して、それを持ち上げることができる下向きに突出する延長部227、229を有する。一次ラックPRは、次いで中間のまたは一時停止の位置260に配置され、把持部222は、一次ラックPRを停止位置260で離し、ロボットアーム220が把持部222を僅かに下げ、次いで、2つのアームが、閉じることにより一次ラックを全把持面によって完全に把持することができる(図5参照)。このようにして、一次ラックPRは、たとえ把持が「後方」から行われる場合にも、たとえば基盤212のラック配置領域に、スペースを無駄にすることなく隣接させて保存することが可能である。
【0034】
図8〜10は、配列要素230の拡大図を示す。配列要素230は、上端面232、底面233、第1の縦側面234、第2の縦側面235および第1と第2の側端面236を備えるほぼ矩形の基部231を有する。
【0035】
配列要素230の第1の縦側面234は、ほぼ平らな表面であり、第1の縦側面234を中央主要部234.1および隣接した2つの小さい外側部分234.2に分割する2つの垂直な突出仕切り237が設けられている。中央主要部234.1の幅B1は、一次ラックPRの平坦な第1の端面76の幅にほぼ等しく、一次ラックのこの端面を2つの垂直な突出仕切り237のあいだに受承できるようになっている。2つの小さい外側部分234.2の幅B3の各々は、(B1−Δ)/2に等しく、Δは、ラック配置領域、即ち基盤212に配置されたときの、隣接する2つの配列要素230間の間隙である。本発明のこの形状により、一次ラックPRの端面76も、また、隣接する配列要素230の垂直な突出仕切り237のあいだに受承することができるようになっており、これにより、一次ラックを保存するまたは一時停止させるために利用可能なスペースを最適な状態で活用することが可能になる。
【0036】
配列要素230の第2の縦側面235は、反対側の第1の縦側面234の2つの垂直な突出仕切り237と対称形に、断面がほぼ三角形で、第2の中央主要部235.1および2つの小さい第2の外側部分235.2を画成する2つの突出部238を有する。突出部238の各々の先端部に、反対側の第1の縦側面234の2つの垂直な突出仕切り237に類似しているとともに、それらの対称位置に垂直突起239が設けられている。したがって、この2つの垂直突起239間の距離は、反対側の第1の中央主要部234.1の幅B1に等しく、2つの突出部238のあいだの第2の中央主要部の幅B2は、一次ラックPRの2つの傾斜面を有する第2の端面78の幅にほぼ等しく、一次ラックのこの傾斜した端面は、2つの突出部238のあいだに受承できるようになっている。ここでも、また、2つの第2の外側部分235.2の各々の幅B4は、幅B2から2つの配列要素間の間隙の半分を際引いた値の半分に等しい、即ちB4=(B2−Δ)/2である。
【0037】
配列要素230の上端面232は、一次ラックの突起237、239と突出部238のあいだへの挿入を容易にするために傾斜縁を有していてもよい。
【0038】
配列要素230は、その底部分233の中央に設けられたクリップ様の位置決め要素240を底部分233に有する。それは、互いに対角線上に配置された2つの位置決めピン241をさらに有する。
【0039】
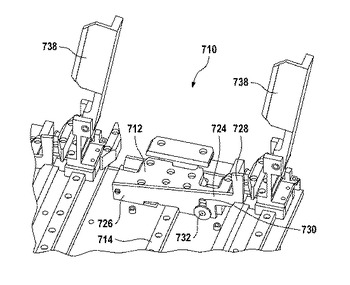
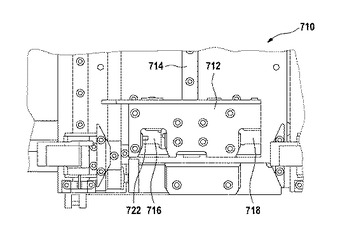
図11〜14は、本発明の一次ラックトレイ受承組立体710を示す。
【0040】
一次ラックトレイ受承組立体710は、滑動レール714に沿って移動可能な受承滑動部712を有する。滑動レール714は、一次ラックトレイ受承組立体の長さ方向に沿って延在しており、長さ方向の大きさは、一次ラックトレイ720を収容できる長さである。
【0041】
受承滑動部712は、一次ラックトレイを受承して、それと固定係合できるように構成されている。このために、受承滑動部712は、受承・固定手段716、718、722、即ち一次ラックトレイ720の対応する突起(図示せず)に係合できるようになっている、ほぼ平坦な上面の2つの開口716、718を有する。開口716の少なくとも1つには、受承滑動部712に挿入されたとき、一次ラックトレイ720の突起の対応する凹みにスナップ嵌合するようになっている引込み式ボルト722が装着されている。引込み式ボルト722のスナップ嵌合の方向は、たとえば一次ラックトレイ720の挿入方向に直交している。
【0042】
空の受承滑動部712が、一次ラックトレイ受承組立体の長手方向の1つの端部740に配置されている(図12参照)。この位置は、待機位置と呼んでもよい。一次ラックトレイ720を受承滑動部712に挿入して取り付けが終わると、受承滑動部712は、挿着された一次ラックトレイ720とともに滑動レール714に沿って押され、待機位置から一次ラックトレイ受承組立体の長さ方向の反対側端部742に移動させられる。
【0043】
一次ラックトレイ720を一次ラックトレイ受承組立体に挿着するとき、枢着された境界ゲート738は、下向きに回動する。境界ゲート738は境界レール744に摺動可能に連結されていて、境界レール744に沿って長さ方向に移動することができる。この移動は、電動モータ748により案内されていて、一次ラックトレイ720に収容された一次ラックの列に制御された押進力を加えることができるようになっている。この移動は、列を組み直し、また、次の一次ラックが間違いなく搬出位置に来るようにするために、たとえば一次ラックが一次ラックトレイ受承組立体の反対側端部742において一次ラックトレイ720から搬出された後に行われる。
【0044】
一次ラックトレイ720の一方の端部から他方の端部への移動特性および安定性を改善するために、一次ラックトレイ720は、一次ラックトレイ720の長さ方向に延在するラックレール746を有し、ラックレール746は、一次ラックの底部分に設けられた凹み80に摺動可能に係合するように構成されている。
【0045】
本発明の受承滑動部712は、境界要素724をさらに有してもよく、境界要素724は、第1の端部726で受承滑動部712の縦側面に枢動可能に連結されているとともに、一次ラックトレイ720の前縁721を横切って上方傾斜位置を取るように付勢されているために、一次ラックトレイ720のラックPRが挿着および移動の操作中並びにその後の取り扱い中に前縁721から脱落することを阻止できる。境界要素724は、受承滑動部712の案内ピン732が挿着される案内溝730を備える。
【0046】
境界要素730は、第1の端部726の枢軸を中心にして、また、案内溝730に沿う向きに付勢力に抗して押下することができる。付勢力に抗して押下したとき、一次ラックトレイ720の前縁721は自由状態になり、最初に配置したラックPRを容易に取り出すことが可能になる。境界要素724は、解放されたとき、即ち押下する力が取り除かれたとき、付勢力のために上向きに再度跳ね上がって、一次ラックトレイ720の前縁721を再度閉鎖する。
【0047】
境界要素724を押下する操作を容易にするために、境界要素724は、反対側の第2の端部に駆動レバーとしての機能を備える垂直延長部728を有する。ロボットアーム220による自動化された境界要素724の押下は、ロボットアーム220の把持部222から突出する対応したボルト224により実施することができる。ボルト224は、把持部222によりラックPRの前端76をつかんだとき把持部222の下方でほぼ水平に、また、一次ラックPRの外周より外側まで突出するようにして、即ちボルト224は一次ラックPRの縦軸に直交して突出する形態で把持部222に取り付けられている(図4と図5を参照)。
【0048】
ロボットアーム220は、一次ラックトレイ720に最初に配置されたラックPRを持ち上げようとするとき、把持部222をラックPRに向けて下げて、ボルト224をレバー728の上端に接触させる。把持部222の下降は継続するために、レバー728に加えられている力のために、境界要素724が押下される。次いで、把持アーム226、228がラックPRをつかみ、さらに、ラックPRは、水平移動して一次ラックトレイ720から取り出される(このことは、境界要素724が押下されているために可能になる)。ボルト224は、ラックPRの外周より外側まで突出しているために、ラックPRが一次ラックトレイから完全に取り出されるまで、レバー728と長い時間接触を続け、これにより、境界要素724は、一次ラックトレイが取り外されるときになって再度跳ね上がることができる。
【0049】
一次ラックトレイ720を一次ラックトレイ受承組立体から取り外す場合には、境界ゲート738を持ち上げて一次ラックトレイ720を一次ラックトレイ受承組立体710から引き出し、さらに、受承滑動部712は滑動レール714に沿って戻される。受承滑動部がその待機位置に復帰させられたとき、引込み式ボルト(722)が、付勢力に抗して後退して一次ラックトレイ(720)の凹みから離脱する。より詳しく述べると、受承滑動部712が740のその待機位置に達すると、引込み式ボルト722の付勢機構が、一次ラックトレイ受承組立体の底の傾斜要素736に当接し、これにより、ボルト722が付勢力に抗して後退して、受承滑動部712の一次ラックトレイ720のロックが解除されるために、一次ラックトレイ720を取り外すことが可能になる。また、移動時の受承滑動部712を固定するために、掛け金要素734を設けてもよい。掛け金要素734は、ボルト722を必ずしも後退させることなく受承滑動部712の移動を阻止できるようにするために、傾斜要素736の少し前方に配置することが好ましい。受承滑動部712が傾斜要素736に向けてさらに引き戻されたときにだけボルト722が後退して、一次ラックトレイ720が解放されるようになっている。
【0050】
また、図12は、複数の棚区画752を備えるラック用棚システム750を示しており、棚区画の各々は、本発明の、上述したような一次ラックトレイ受承組立体を有する。本発明のラック用棚システム750は、限られたスペースしか利用できない場合にも、研究室の試料試験管ラックを多数取り扱うことを可能にする。ラック用棚システム750は、本明細書において説明しかつ開示した、一次ラックPRを水平把持できるロボット把持部222と組み合わせたとき、とりわけ有効に動作するが、それは、把持部222が一次ラックPRを棚のラック用位置に水平移動により挿入、即ち挿着できる可能性をも与えてくれるからである(これは、ラックを上方からつかむ把持部の場合には不可能である)。この搬入方法は、上述した、ラックを一次ラックトレイから搬出する方法にも同様に当てはまる。
【0051】
本発明の一態様によると、上部または最上部の棚式トレイ受承組立体が、(ロボットアーム220により)搬出される一次ラックが収容されたラックトレイを受承するが、下方の棚区画は、一次ラックを収容することになっている空のラックトレイを受承する。
【符号の説明】
【0052】
76 第1の端面
78 第2の端面
78.1 傾斜端部
212 ラック配置領域
230 配列要素
233 底部分
234 第1の縦側面
235 第2の縦側面
240 位置決め要素
712 受承滑動部
714 滑動レール
716、718、722 受承・固定手段
720 ラックトレイ
721 前縁
722 引込み式ボルト
724 境界要素
726 第1の端部
740 一方の端部
742 反対側の端部
750 ラック用棚
752 棚区画
【特許請求の範囲】
【請求項1】
研究室の試料試験管を取り扱う研究室システムにおいて、一次ラック(PR)をつかむ把持部(222)を備えるロボットアーム(220)を有し、取り扱われる前記一次ラック(PR)は、第1の端面(76)と第2の端面(78)とを有し、前記第1の端面(76)は第1の面形状を有し、前記第2の端面(78)は第2の面形状を有し、前記把持部(222)は、第1の把持アーム(226)と第2の把持アーム(228)とを有し、前記第1の把持アーム(226)は、前記第1の面形状に相補的な把持面を有し、前記第2の把持アーム(228)は、前記第2の面形状に相補的な把持面を有することを特徴とする研究室システム。
【請求項2】
前記第1の面(76)の形状は平坦面であり、また、前記第2の面(78)の形状は2つの傾斜端部(78.1)を持つものであることを特徴とする請求項1記載の研究室システム。
【請求項3】
前記第1および第2の把持アーム(226、228)は、一次ラック(PR)を水平面内において挟んで把持するように水平トングとして形成されていることを特徴とする請求項1または2記載の研究室システム。
【請求項4】
前記把持アーム(226、228)の各々は、一次ラック(PR)の各々の端面(76、78)の上部を把持することを可能とする、各々が下向きに突出する延長部(227、229)を有することを特徴とする請求項1〜3のいずれか1項に記載の研究室システム。
【請求項5】
ラック(PR)を研究室システムのラック配置領域(212)に配列するための配列要素(230)であって、配列されるラック(PR)が、第1の端面(76)と第2の端面(78)とを有し、前記第1の端面(76)は第1の面形状を有し、前記第2の端面(78)は第2の面形状を有する配列要素(230)において、底部分(233)と、第1の縦側面(234)と、第2の縦側面(235)とを有し、前記第1の縦側面(234)は前記第1の面形状に相補的であり、前記第2の縦側面(235)は前記第2の面形状に相補的であり、前記底部分(233)は、前記配列要素(230)を前記ラック配置領域(212)に、他の配列要素(230)と同一の向きになるよう配置するためのクリップ様の位置決め要素(240)を有することを特徴とする配列要素(230)。
【請求項6】
前記第1の面形状は平坦面であり、また、前記第2の面形状は2つの傾斜端部(78.1)を有するものであることを特徴とする請求項5記載の配列要素。
【請求項7】
ラックトレイ受承組立体において、滑動レール(714)に沿って移動可能な受承滑動部(712)を有し、前記受承滑動部(712)は、ラックトレイ(720)を前記受承滑動部(712)に固定するための受承・固定手段(716、718、722)を有し、前記ラックトレイ(720)は、前記ラックトレイ(720)の前部(721)を、前記受承・固定手段(716、718、722)に挿着され、前記前部(721)は、開放されているとともに前記受承滑動部(712)の境界要素(724)(724)に当接しており、前記境界要素(724)は、前記受承滑動部(712)に第1の端部(726)により枢動可能に連結されているとともに、前記ラックトレイ(720)の前記前縁(721)を横切って上方傾斜位置を取るように付勢されているために、前記ラックトレイ(720)のラック(PR)の前記前縁(721)を介しての脱落を阻止できるようになっていることを特徴とするラックトレイ受承組立体。
【請求項8】
ラックトレイ(720)を受承できるよう長手方向の長さを有し、空の受承滑動部(712)が、長手方向の一方の端部(740)の待機位置に配置されていてラックトレイ(720)が挿着されるとき、前記滑動レール(714)に沿って長手方向の反対側の端部(742)に向けて押進させられることを特徴とする請求項7記載のラックトレイ受承組立体。
【請求項9】
ラックトレイ受承組立体において、ラックトレイ(720)を受承できるよう長手方向の長さを有し、また、滑動レール(714)に沿って移動可能な受承滑動部(712)を備えており、前記受承滑動部(712)は、ラックトレイ(720)を前記受承滑動部(712)に固定するために受承・固定手段(716、718、722)を有し、前記ラックトレイ(720)は、前記ラックトレイ(720)の前部(721)を、前記受承・固定手段(716、718、722)に挿着され、空の受承滑動部(712)が、長手方向の一方の端部(740)の待機位置に配置されていてラックトレイ(720)が挿着されるとき、前記滑動レール(714)に沿って長手方向の反対側の端部(742)に向けて押進させられるようになっており、前記受承・固定手段(716、718、722)は、前記ラックトレイ(720)が前記受承滑動部(712)に挿着されたとき、前記ラックトレイ(720)の対応する凹みに嵌入する引込み式ボルト(722)を有し、前記受承滑動部(712)は、その待機位置から移動させられることを特徴とするラックトレイ受承組立体。
【請求項10】
前記ラックトレイ(720)の前部(721)は、開放されているとともに、前記受承滑動部(712)の境界要素(724)に当接しており、前記境界要素(724)は、第1の端部(726)で前記受承滑動部(712)に枢動可能に連結されているとともに、前記ラックトレイ(720)の前記前縁(721)を横切って上方傾斜位置を取るように付勢されているために、前記ラックトレイ(720)のラック(PR)の前記前縁(721)を介しての脱落を阻止できるようになっていることを特徴とする請求項8または9記載のラックトレイ受承組立体。
【請求項11】
複数の棚区画(752)を備えるラック用棚(750)を有し、前記棚区画(752)の各々は、請求項6〜11のいずれか1項に記載のラックトレイ受承組立体(710)を有することを特徴とする研究室の試料試験管ラックを取り扱う研究室システム。
【請求項12】
前記把持部(222)は、前記境界要素(224)を解放するための固定・解放ボルト(224)をさらに有することを特徴とする請求項1〜4および請求項11のいずれか1項に記載の研究室システム。
【請求項13】
一次ラック(PR)を把持する把持部(222)を有するロボットアーム(220)により研究室の試料試験管ラックを取り扱う方法において、前記把持部(222)は、第1の把持アーム(226)および第2の把持アーム(228)を備えて水平トングとして形成されており、前記把持部(222)は、水平面内において前記一次ラック(PR)を挟んで把持することを特徴とする研究室の試料試験管ラックを取り扱う方法。
【請求項14】
一次ラック(PR)を把持する把持部(222)を有するロボットアーム(220)により研究室の試料試験管ラックを取り扱う方法において、前記把持部(222)は、第1の把持アーム(226)および第2の把持アーム(228)を備えて水平トングとして形成されており、複数の一次ラックが隣り合わせて並列に配置されている場合、前記ロボットアーム(220)は、まず前記第1および第2の把持アーム(226、228)から下向きに突出する延長部(227、229)により、一次ラック(PR)を上方からつまんで垂直に持ち上げ、次いで、中間のまたは一時停止の位置(260)に配置し、前記把持部(222)を下げ、前記第1および第2の把持アーム(226、228)を閉じ、これにより前記一次ラックを完全に把持することを特徴とする方法。
【請求項1】
研究室の試料試験管を取り扱う研究室システムにおいて、一次ラック(PR)をつかむ把持部(222)を備えるロボットアーム(220)を有し、取り扱われる前記一次ラック(PR)は、第1の端面(76)と第2の端面(78)とを有し、前記第1の端面(76)は第1の面形状を有し、前記第2の端面(78)は第2の面形状を有し、前記把持部(222)は、第1の把持アーム(226)と第2の把持アーム(228)とを有し、前記第1の把持アーム(226)は、前記第1の面形状に相補的な把持面を有し、前記第2の把持アーム(228)は、前記第2の面形状に相補的な把持面を有することを特徴とする研究室システム。
【請求項2】
前記第1の面(76)の形状は平坦面であり、また、前記第2の面(78)の形状は2つの傾斜端部(78.1)を持つものであることを特徴とする請求項1記載の研究室システム。
【請求項3】
前記第1および第2の把持アーム(226、228)は、一次ラック(PR)を水平面内において挟んで把持するように水平トングとして形成されていることを特徴とする請求項1または2記載の研究室システム。
【請求項4】
前記把持アーム(226、228)の各々は、一次ラック(PR)の各々の端面(76、78)の上部を把持することを可能とする、各々が下向きに突出する延長部(227、229)を有することを特徴とする請求項1〜3のいずれか1項に記載の研究室システム。
【請求項5】
ラック(PR)を研究室システムのラック配置領域(212)に配列するための配列要素(230)であって、配列されるラック(PR)が、第1の端面(76)と第2の端面(78)とを有し、前記第1の端面(76)は第1の面形状を有し、前記第2の端面(78)は第2の面形状を有する配列要素(230)において、底部分(233)と、第1の縦側面(234)と、第2の縦側面(235)とを有し、前記第1の縦側面(234)は前記第1の面形状に相補的であり、前記第2の縦側面(235)は前記第2の面形状に相補的であり、前記底部分(233)は、前記配列要素(230)を前記ラック配置領域(212)に、他の配列要素(230)と同一の向きになるよう配置するためのクリップ様の位置決め要素(240)を有することを特徴とする配列要素(230)。
【請求項6】
前記第1の面形状は平坦面であり、また、前記第2の面形状は2つの傾斜端部(78.1)を有するものであることを特徴とする請求項5記載の配列要素。
【請求項7】
ラックトレイ受承組立体において、滑動レール(714)に沿って移動可能な受承滑動部(712)を有し、前記受承滑動部(712)は、ラックトレイ(720)を前記受承滑動部(712)に固定するための受承・固定手段(716、718、722)を有し、前記ラックトレイ(720)は、前記ラックトレイ(720)の前部(721)を、前記受承・固定手段(716、718、722)に挿着され、前記前部(721)は、開放されているとともに前記受承滑動部(712)の境界要素(724)(724)に当接しており、前記境界要素(724)は、前記受承滑動部(712)に第1の端部(726)により枢動可能に連結されているとともに、前記ラックトレイ(720)の前記前縁(721)を横切って上方傾斜位置を取るように付勢されているために、前記ラックトレイ(720)のラック(PR)の前記前縁(721)を介しての脱落を阻止できるようになっていることを特徴とするラックトレイ受承組立体。
【請求項8】
ラックトレイ(720)を受承できるよう長手方向の長さを有し、空の受承滑動部(712)が、長手方向の一方の端部(740)の待機位置に配置されていてラックトレイ(720)が挿着されるとき、前記滑動レール(714)に沿って長手方向の反対側の端部(742)に向けて押進させられることを特徴とする請求項7記載のラックトレイ受承組立体。
【請求項9】
ラックトレイ受承組立体において、ラックトレイ(720)を受承できるよう長手方向の長さを有し、また、滑動レール(714)に沿って移動可能な受承滑動部(712)を備えており、前記受承滑動部(712)は、ラックトレイ(720)を前記受承滑動部(712)に固定するために受承・固定手段(716、718、722)を有し、前記ラックトレイ(720)は、前記ラックトレイ(720)の前部(721)を、前記受承・固定手段(716、718、722)に挿着され、空の受承滑動部(712)が、長手方向の一方の端部(740)の待機位置に配置されていてラックトレイ(720)が挿着されるとき、前記滑動レール(714)に沿って長手方向の反対側の端部(742)に向けて押進させられるようになっており、前記受承・固定手段(716、718、722)は、前記ラックトレイ(720)が前記受承滑動部(712)に挿着されたとき、前記ラックトレイ(720)の対応する凹みに嵌入する引込み式ボルト(722)を有し、前記受承滑動部(712)は、その待機位置から移動させられることを特徴とするラックトレイ受承組立体。
【請求項10】
前記ラックトレイ(720)の前部(721)は、開放されているとともに、前記受承滑動部(712)の境界要素(724)に当接しており、前記境界要素(724)は、第1の端部(726)で前記受承滑動部(712)に枢動可能に連結されているとともに、前記ラックトレイ(720)の前記前縁(721)を横切って上方傾斜位置を取るように付勢されているために、前記ラックトレイ(720)のラック(PR)の前記前縁(721)を介しての脱落を阻止できるようになっていることを特徴とする請求項8または9記載のラックトレイ受承組立体。
【請求項11】
複数の棚区画(752)を備えるラック用棚(750)を有し、前記棚区画(752)の各々は、請求項6〜11のいずれか1項に記載のラックトレイ受承組立体(710)を有することを特徴とする研究室の試料試験管ラックを取り扱う研究室システム。
【請求項12】
前記把持部(222)は、前記境界要素(224)を解放するための固定・解放ボルト(224)をさらに有することを特徴とする請求項1〜4および請求項11のいずれか1項に記載の研究室システム。
【請求項13】
一次ラック(PR)を把持する把持部(222)を有するロボットアーム(220)により研究室の試料試験管ラックを取り扱う方法において、前記把持部(222)は、第1の把持アーム(226)および第2の把持アーム(228)を備えて水平トングとして形成されており、前記把持部(222)は、水平面内において前記一次ラック(PR)を挟んで把持することを特徴とする研究室の試料試験管ラックを取り扱う方法。
【請求項14】
一次ラック(PR)を把持する把持部(222)を有するロボットアーム(220)により研究室の試料試験管ラックを取り扱う方法において、前記把持部(222)は、第1の把持アーム(226)および第2の把持アーム(228)を備えて水平トングとして形成されており、複数の一次ラックが隣り合わせて並列に配置されている場合、前記ロボットアーム(220)は、まず前記第1および第2の把持アーム(226、228)から下向きに突出する延長部(227、229)により、一次ラック(PR)を上方からつまんで垂直に持ち上げ、次いで、中間のまたは一時停止の位置(260)に配置し、前記把持部(222)を下げ、前記第1および第2の把持アーム(226、228)を閉じ、これにより前記一次ラックを完全に把持することを特徴とする方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−32516(P2010−32516A)
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−172310(P2009−172310)
【出願日】平成21年7月23日(2009.7.23)
【出願人】(501205108)エフ ホフマン−ラ ロッシュ アクチェン ゲゼルシャフト (285)
【Fターム(参考)】
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願番号】特願2009−172310(P2009−172310)
【出願日】平成21年7月23日(2009.7.23)
【出願人】(501205108)エフ ホフマン−ラ ロッシュ アクチェン ゲゼルシャフト (285)
【Fターム(参考)】
[ Back to top ]