
試薬庫、自動分析装置および試薬トレイ駆動方法
【課題】試薬トレイを円滑に搬送でき、試薬の分注を正確に行ない得る試薬庫、分析装置および試薬トレイ駆動方法を提供すること。
【解決手段】試薬トレイ駆動部35によって試薬トレイ33を回転させ、収容する試薬容器62を分注プローブの試薬吸引位置Aまで搬送する試薬庫3であって、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで試薬トレイ33を回転させたときの角速度あるいは角加速度を含む速度情報を測定するセンサ34と、試薬トレイ33の回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、センサ34によって測定された速度情報に対応する補正駆動電圧を求める生成部37cと、前記補正駆動電圧を印加する駆動電圧時間プロファイルで試薬トレイ33を回転駆動する試薬トレイ制御部37dと、を備える。
【解決手段】試薬トレイ駆動部35によって試薬トレイ33を回転させ、収容する試薬容器62を分注プローブの試薬吸引位置Aまで搬送する試薬庫3であって、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで試薬トレイ33を回転させたときの角速度あるいは角加速度を含む速度情報を測定するセンサ34と、試薬トレイ33の回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、センサ34によって測定された速度情報に対応する補正駆動電圧を求める生成部37cと、前記補正駆動電圧を印加する駆動電圧時間プロファイルで試薬トレイ33を回転駆動する試薬トレイ制御部37dと、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検体および試薬を反応容器に分注し、反応容器内の検体と試薬の間で生じた反応を、光学的に検出する自動分析装置の試薬庫、自動分析装置および試薬トレイ駆動方法に関する。
【背景技術】
【0002】
従来、血液や尿などの検体を自動的に分析する装置として、検体および試薬を反応容器に分注し、反応容器内の検体と試薬の間で生じた反応を光学的に検出する自動分析装置が使用されている。このような自動分析装置では、使用する複数の試薬を個別に収容する試薬容器群を、それぞれ試薬庫内の試薬トレイに収納し、検体や分析項目に応じて所要の試薬を収容した試薬容器を分注プローブによる分注位置まで搬送して分注している。この試薬容器の搬送は、試薬トレイ駆動部により行なわれ、試薬トレイ駆動部を駆動するための駆動パルスは、試薬容器の搬送距離に応じて調整制御される。
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、試薬容器および試薬量ともフルに充填された場合を基準として設定された基準駆動パルスで試薬トレイ駆動部を駆動すると、収納する試薬容器数または試薬量が減少した場合に、駆動トルクの低下により試薬トレイの回転速度が設定値より高くなり分注位置で急停止されることがある。このように試薬トレイが急停止されると、試薬液面に波立ちや気泡が発生するため、分注プローブによる試薬吸引の際、波立ちや気泡によって液面を誤検知し、正確な分注が妨げられることがあった。
【0004】
本発明は、上記した従来技術の欠点に鑑みてなされたものであり、試薬容器の出し入れや試薬使用による試薬量の減少に際しても、試薬トレイを円滑に搬送でき、試薬の分注を正確に行ない得る試薬庫、自動分析装置および試薬トレイ駆動方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するために、本発明にかかる試薬庫は、試薬トレイ駆動部によって試薬トレイを回転させ、収容する試薬容器を分注プローブの試薬吸引位置まで搬送する試薬庫であって、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定する測定手段と、前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、前記測定手段によって測定された速度情報に対応する補正駆動電圧を求める生成手段と、前記生成手段によって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動する駆動制御手段と、を備えることを特徴とする。
【0006】
また、本発明の試薬庫は、上記発明において、前記関係をもとに、前記基準駆動電圧時の速度情報と前記測定手段によって測定された速度情報との差を演算する演算手段と、前記演算手段によって演算された差が所定の許容範囲であるか否かを判定する判定手段と、を備え、前記生成手段は、前記差が所定の許容範囲を超える場合に前記関係をもとに前記補正駆動電圧を求め、前記駆動制御手段は、前記生成手段によって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする。
【0007】
また、本発明の試薬庫は、上記発明において、前記基準駆動電圧時間プロファイルをデフォルトとして記憶し、前記生成手段によって求められた駆動電圧時間プロファイルに逐次更新する記憶手段を備え、前記駆動制御手段は、前記記憶手段に記憶されている基準駆動電圧プロファイルあるいは駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする。
【0008】
また、本発明の試薬庫は、上記発明において、試薬残量を算出する試薬残量算出手段を備え、前記生成手段は、初期化時および前記試薬残量が所定値になった場合に前記補正駆動電圧を求めることを特徴とする。
【0009】
また、本発明の試薬庫は、上記発明において、前記試薬残量算出手段は、試験項目と分注回数との積算によって前記試薬残量を算出することを特徴とする。
【0010】
また、本発明の試薬庫は、上記発明において、前記試薬残量算出手段は、前記測定手段によって測定された速度情報をもとに前記試薬残量を推定演算することを特徴とする。
【0011】
また、本発明の自動分析装置は、検体と試薬とを反応させることによって前記検体の成分を光学的に分析する自動分析装置であって、液体としての前記試薬を収容する試薬容器を試薬トレイに収納し、試薬吸引位置まで搬送する前記に記載の試薬庫を備えたことを特徴とする。
【0012】
また、本発明の試薬トレイ駆動方法は、試薬トレイ駆動部によって試薬トレイを回転させ、収容する試薬容器を分注プローブの試薬吸引位置まで搬送する試薬トレイ駆動方法であって、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定する測定ステップと、前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、前記測定ステップによって測定された速度情報に対応する補正駆動電圧を求める生成ステップと、前記生成ステップによって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動する駆動制御ステップと、を含むことを特徴とする。
【0013】
また、本発明の試薬トレイ駆動方法は、上記の発明において、前記関係をもとに、前記基準駆動電圧時の速度情報と前記測定手段によって測定された速度情報との差を演算する演算ステップと、前記演算ステップによって演算された差が所定の許容範囲であるか否かを判定する判定ステップと、を備え、前記生成ステップは、前記差が所定の許容範囲を超える場合に前記関係をもとに前記補正駆動電圧を求め、前記駆動制御ステップは、前記生成ステップによって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする。
【0014】
また、本発明の試薬トレイ駆動方法は、上記の発明において、前記基準駆動電圧時間プロファイルをデフォルトとして記憶し、前記生成ステップによって求められた駆動電圧時間プロファイルに逐次更新する記憶ステップを備え、前記駆動制御ステップは、前記記憶ステップに記憶されている基準駆動電圧プロファイルあるいは駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする。
【0015】
また、本発明の試薬トレイ駆動方法は、上記の発明において、試薬残量を算出する試薬残量算出ステップを備え、前記生成ステップは、初期化時および前記試薬残量が所定値になった場合に前記補正駆動電圧を求めることを特徴とする。
【0016】
また、本発明の試薬トレイ駆動方法は、上記の発明において、前記試薬残量算出ステップは、試験項目と分注回数との積算によって前記試薬残量を算出することを特徴とする。
【0017】
また、本発明の試薬トレイ駆動方法は、上記の発明において、前記試薬残量算出ステップは、前記測定ステップによって測定された速度情報をもとに前記試薬残量を推定演算することを特徴とする。
【発明の効果】
【0018】
本発明にかかる試薬庫、自動分析装置および試薬トレイ駆動方法は、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定し、前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、測定された速度情報に対応する補正駆動電圧を求め、当該補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することにより、試薬トレイの急停止による試薬の波立ちや泡立ちを抑制することが可能となり、検体の分析精度を高度に維持することができるという効果を奏する。
【発明を実施するための最良の形態】
【0019】
以下、図面を参照して、本発明に係る試薬庫、自動分析装置および試薬トレイ駆動方法の好適な実施の形態について説明する。なお、この実施の形態により本発明が限定されるものではない。また、図面の記載において、同一部分には同一の符号を付している。
【0020】
(実施の形態1)
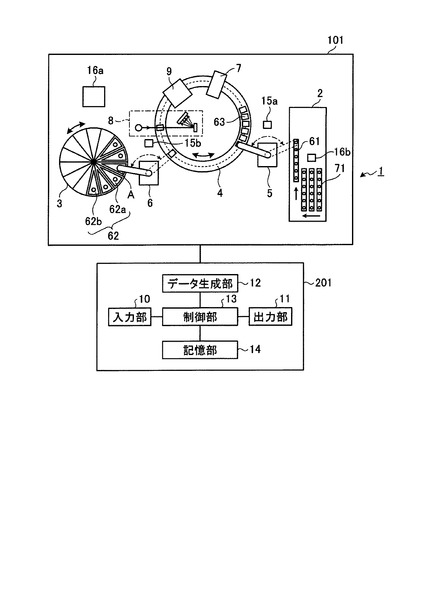
図1は、本発明の実施の形態1にかかる試薬庫を用いた分析装置の構成を示す模式図である。同図に示す自動分析装置1は、検体(試料)および試薬を反応容器63にそれぞれ分注し、その反応容器63内で生じる反応を光学的に測定する測定ユニット101と、測定ユニット101を含む自動分析装置1の制御を行うとともに測定ユニット101における測定結果の分析を行うデータ処理ユニット201とを有し、これら2つのユニットが連携することによって複数の検体の成分の生化学的な分析を自動的かつ連続的に行う装置である。
【0021】
測定ユニット101は、検体を収容する検体容器61が搭載された複数のラック71を収納する検体容器保持部2と、試薬容器62a、62b等(以下試薬容器62a、62b等を総称して試薬容器62という)を収納する試薬庫3と、試薬容器62および検体容器61に貼付された情報をそれぞれ読み取る読取部16a、16bと、検体と試薬とを反応させる反応容器63を保持する反応テーブル4と、検体容器保持部2が保持する検体容器61が収容する検体を反応容器63に分注する検体分注装置5と、試薬庫3に収納される試薬容器62が収容する試薬を反応容器63に分注する試薬分注装置6と、反応容器63内部の液体を攪拌する攪拌部7と、光源から照射されて反応容器63を通過した光を受光して所定の波長成分の強度等を測定する測光部8と、反応容器63の洗浄を行う反応容器洗浄部9と、検体分注装置5および試薬分注装置6の分注プローブを洗浄するプローブ洗浄部15a、15bと、を備える。
【0022】
検体容器61が搭載されたラック71は、駆動手段によって矢印で示す方向に搬送される。ラック71の搬送により、検体容器61は検体分注装置5によって検体が吸引される検体吸引位置に搬送される。検体容器61には、収容された検体の種類や分析項目に関する検体情報を有する識別ラベル(図示せず)が貼り付けられ、検体容器保持部2は、検体容器61の識別ラベルの情報を読み取る読取部16bを備えている。
【0023】
検体分注装置5は、検体の吸引および吐出を行なう分注プローブが先端部に取り付けられ、鉛直方向への昇降および自身の基端部を通過する鉛直線を中心軸とする回転を自在に行なうアームを備える。検体分注装置5は、検体容器保持部2と反応テーブル4との間に設けられ、ラック71によって検体吸引位置に搬送された検体容器61内の検体を分注プローブによって吸引し、アームを旋回させ、反応テーブル4によって検体吐出位置に搬送された反応容器63に分注して検体を所定タイミングで反応テーブル4上の反応容器63内に移送する。
【0024】
試薬分注装置6は、試薬の吸引および吐出を行なう分注プローブが先端部に取り付けられ、鉛直方向への昇降および自身の基端部を通過する鉛直線を中心軸とする回転を自在に行なうアームを備える。試薬分注装置6は、試薬庫3と反応テーブル4との間に設けられ、試薬庫3によって試薬吸引位置Aに搬送された試薬容器62内の試薬を分注ノズルによって吸引し、アームを旋回させ、反応テーブル4によって試薬吐出位置に搬送された反応容器63に分注して試薬を所定タイミングで反応テーブル4上の反応容器63内に移送する。
【0025】
プローブ洗浄部15a、15bは、検体容器保持部2と反応テーブル4との間、および試薬庫3と反応テーブル4の間であって、検体分注装置5および試薬分注装置6における分注プローブの水平移動の軌跡の途中位置に設けられ、分注プローブを洗浄して検体および試薬のキャリーオーバーを防止する。
【0026】
反応テーブル4は、駆動手段によって矢印で示す方向に回転され、外周には周方向に沿って複数の反応容器収納部が等間隔で設けられている。各反応容器収納部には、反応容器63が着脱自在に収納される。また、反応テーブル4の回転により、反応容器63は試薬分注装置6によって試薬が吐出される試薬吐出位置、または検体分注装置5によって検体が吐出される検体吐出位置に搬送される。反応テーブル4は、各収納部の半径方向両側に測定光が通過する開口が形成されている。反応テーブル4の外周近傍には、攪拌部7、測光部8及び反応容器洗浄部9が配置され、反応液の攪拌、分析、または反応容器の洗浄の際に、駆動手段により反応容器63は所定の位置に搬送される。
【0027】
反応容器63は、測光部8の光源から出射された分析光に含まれる光の80%以上を透過する透明素材、例えば、耐熱ガラスを含むガラス、環状オレフィンやポリスチレン等の合成樹脂が使用される。
【0028】
測光部8は、反応テーブル4の外周近傍に配置され、反応容器63に保持された液体を分析する分析光を出射する光源と、液体を保持した反応容器63を透過した分析光を分光して受光する受光部とを有している。測光部8は、前記光源と受光部が反応テーブル4の反応容器収納部を挟んで半径方向に対向する位置に配置されている。
【0029】
反応容器洗浄部9は、反応容器63から液体や洗浄液を排出する排出手段と、洗浄液の分注手段とを有している。反応容器洗浄部9は、測光終了後の反応容器63から測光後の液体を排出した後、洗浄液を分注する。反応容器洗浄部9は、洗浄液の分注と排出との動作を複数回繰り返すことにより、反応容器63の内部を洗浄する。このようにして洗浄された反応容器63は、再度、新たな検体の分析に使用される。
【0030】
攪拌部7は、反応容器63に保持された液体を攪拌する装置であり、パルスモータ、アーム、カム、攪拌板等を有している。
【0031】
データ処理ユニット201は、キーボードやマウスなどを有し、検体の分析に必要な情報や自動分析装置1の操作情報が入力される入力部10と、ディスプレイやプリンタを有し、検体の分析に関する情報等を出力する出力部11と、測定ユニット101における測定結果に基づいて反応容器63内部の液体の吸光度を算出したり、吸光度の算出結果と検量線や分析パラメータ等の各種情報とを用いて反応容器63内部の液体の成分を算出したりするデータ生成部12と、自動分析装置1の制御を行う制御部13と、検体の分析に関する情報を含む各種情報を記憶する記憶部14と、を備える。データ処理ユニット201は、CPU、ROM、RAM等を具備したコンピュータによって実現される。
【0032】
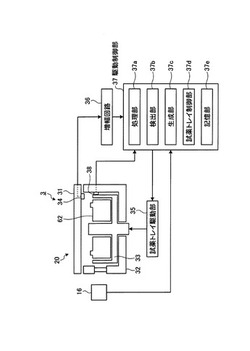
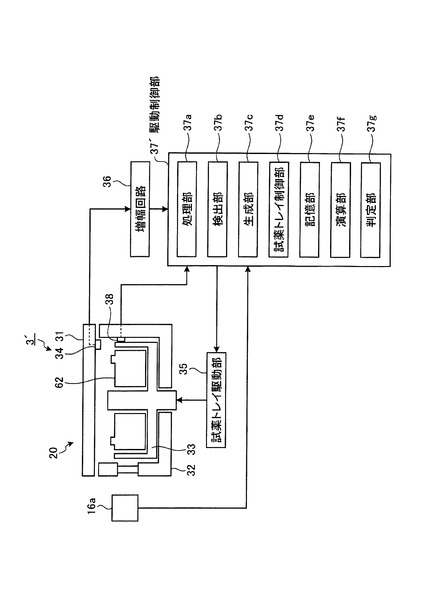
次に、図2に示す試薬庫の構成図を用いて、本発明の試薬庫について詳細に説明する。試薬庫3は、試薬容器保持部20と、試薬トレイ駆動部35と、増幅回路36と、駆動制御部37を備えている。
【0033】
試薬容器保持部20は、試薬を収容する試薬容器62と、試薬容器62を収納する試薬トレイ33と、試薬トレイ33の回転速度情報を検知するセンサ34と、試薬容器62の位置を検知する位置検知センサ38と、試薬トレイ33を側面および底面で包み込む本体部32と、本体部32にかぶせる蓋部31からなる。
【0034】
センサ34は、試薬トレイ33の上面側に形成されたマーカを、当該マーカの上部からエンコーダで検知して、試薬トレイ33の角速度または角加速度などの速度情報を検出し、検出した信号を増幅回路36に出力する。増幅回路36は、センサ34から出力される検知信号(アナログ)を増幅し、増幅した圧力信号を駆動制御部37へ出力する。
【0035】
駆動制御部37は、試薬トレイ駆動部35を駆動するための制御手段であり、CPU、RAC、ROM等を用いて構成される。制御搬送部37は、処理部37a、検出部37b、生成部37c、試薬トレイ制御部37dおよび記憶部37eを備えている。
【0036】
処理部37aは、増幅回路36から入力される検知信号(アナログ)をデジタル信号に変換処理する部分で、例えばA/D変換器が使用される。検出部37bは、処理部37aによってデジタル信号に変換された検知信号から試薬トレイ33の角速度または角加速度等の速度情報を検出する。生成部37cは、角速度時間プロファイルに基づき、試薬トレイ駆動部35の駆動パルスである基準駆動電圧を補正して補正駆動電圧を生成する。試薬トレイ制御部37dは、駆動パルスとして記憶される基準駆動電圧または補正駆動電圧下で前記試薬トレイ駆動部35を駆動して試薬トレイ33を回転させる。記憶部37eは、基準駆動電圧および生成部37cにより生成された補正駆動電圧を駆動パルスとして記憶する。
【0037】
基準駆動電圧は、試薬を満載した試薬容器62を試薬庫3内の試薬容器収納部全てに搭載した状態における試薬トレイ駆動部35の駆動パルスであり、たとえば試薬容器1個分を搬送する際の基準駆動電圧が記憶部37eに記憶されている。この基準駆動電圧に基づき、所要の試薬容器の搬送距離に応じて基準駆動電圧を調整した駆動パルスが試薬トレイ制御部37dから出力されることにより、試薬トレイ駆動部35は駆動される。
【0038】
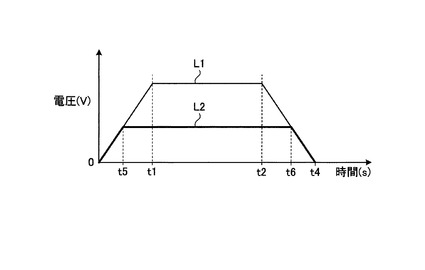
図3は、基準駆動電圧を示す図である。台形状の折れ線L2(太線)が試薬容器1ポジション分の基準駆動電圧であり(図1の試薬容器62aから試薬吸引位置Aまでが1ポジション)、記憶部37eには、図3に示す試薬容器1ポジション分の基準駆動電圧(折れ線L2)のみが記憶されている。そして、たとえば試薬容器3ポジション分試薬トレイを搬送する場合(図1の試薬容器62bから試薬吸引位置Aまでが3ポジション)、試薬トレイ制御部37dは記憶部37eに記憶されている基準駆動電圧L2を調整した駆動パルスL1(細線)を発信して、試薬トレイ駆動部35を制御する。このように、試薬トレイ33の搬送距離に応じて、試薬トレイ制御部37dにより前記基準駆動電圧を調整した制御パルスが発信され、試薬トレイは搬送される。なお、駆動制御部37の試薬トレイ制御部37dおよび記憶部37eは、データ処理ユニット201の制御部13および記憶部14が兼ねていても良い。
【0039】
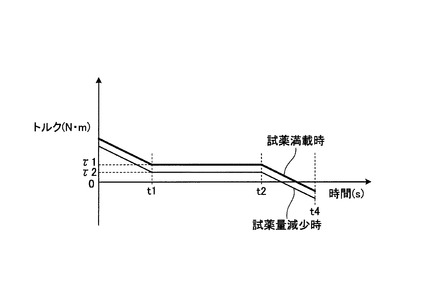
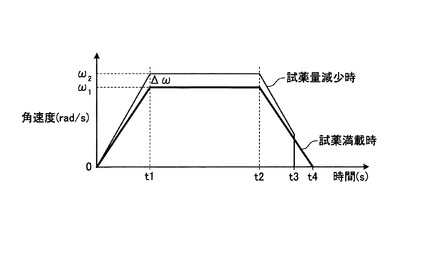
前記基準駆動電圧で試薬トレイ駆動部35の駆動制御を続けると、試薬トレイ33に収納される試薬の量の減少により、試薬トレイ駆動部35の駆動トルクは減少し、これに伴い試薬トレイ33の回転速度は上昇する。図4は、基準駆動電圧で試薬満載時および試薬減少時の試薬トレイ33を回転したときのトルクの時間変化を示すグラフ、図5は同条件下での試薬トレイ33の角速度の時間変化を示すグラフである。
【0040】
図4に示すように、試薬トレイ駆動部35の駆動トルクは、駆動開始時が最も高く、試薬トレイが等速になる時間t1まで一定の割合で減少し、試薬トレイ33の等速運動時(t1〜t2)は一定であり、その後減速のために再び一定の割合で減少する。基準駆動パルスで試薬満載時の試薬トレイ駆動部35を駆動した場合、等速運動時のトルクはτ1であるのに対し、同じ基準駆動パルスで終了する試薬量が減少にした試薬トレイ33を駆動すると、トルクの折れ線は相対的に下方に移動し、等速運動時のトルクもτ2まで減少する。試薬トレイ33に収容する試薬量が減少すればするほど、トルク−時間特性図は下方に移動する。
【0041】
一方、基準駆動電圧で試薬トレイ駆動部35を駆動したときの試薬トレイ33の角速度は、図5に示すように、時間t1まで等加速度的に増加し、時間t1〜t2の等速運動の後、等加速度的に減少する台形型になる。基準駆動電圧で試薬トレイ駆動部35を駆動したときの、試薬を満載した試薬トレイ33の等速運動時の角速度はω1であるのに対し、試薬量が減少した場合の試薬トレイ33の等速運動時の角速度はω2まで増加する。したがって、試薬トレイ33に収容する試薬量が減少すると、設計上は時間t4で試薬吸引位置Aに所要の試薬容器62が搬送される予定が、時間t3で試薬容器62は試薬吸引位置Aに搬送されることになり、試薬容器62を試薬吸引位置Aで停止させるために、試薬トレイ33は時間t3で急停止されることになる。このような急停止を防止するため、基準駆動電圧を印加したときの基準駆動電圧時間プロファイルで試薬トレイ33を回転させ、センサ34により試薬トレイ33の角速度または各加速度を測定し、試薬トレイ33の回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、センサ34によって測定された速度情報に対応する補正駆動電圧を求める。求めた補正駆動電圧を印加する駆動電圧時間プロファイルで試薬トレイ33を回転駆動することにより、試薬トレイ33を設計上の理論値に近似する駆動トルクや角速度で駆動することが可能となり、試薬トレイ33の急停止を抑制することが可能となる。
【0042】
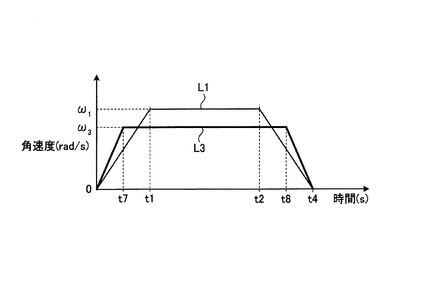
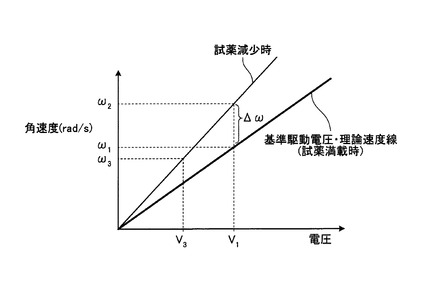
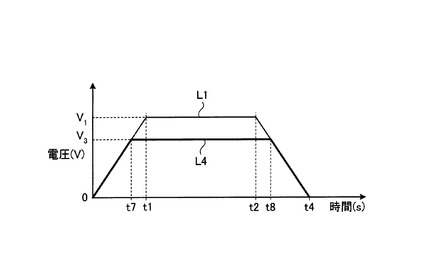
補正駆動電圧は、以下のようにして生成される。図6は、試薬満載時の試薬トレイ33を基準駆動電圧で搬送させたとき(折れ線L1)、および試薬減少時の試薬トレイ33を補正駆動電圧で搬送させたとき(折れ線L3)の試薬トレイ33の角速度の時間変化を示すグラフである。試薬満載時または試薬減少時のいずれの場合も試薬トレイ33(試薬容器62)の搬送距離は同一であり、グラフ上台形で表される面積は同一となる。したがって、生成部37cは、センサ34により測定された角速度または角加速度を含む速度情報に基づき、折れ線L1が形成する台形の面積と同じになる折れ線L3の角速度ω3と時間t7およびt8を求める。そして、図7に示す駆動電圧値と試薬トレイの角速度との関係(基準駆動電圧―理論速度値特性図)を示すグラフから、角速度ω3となる電圧V3を求め、図8の補正駆動電圧を生成する。図8に示す補正駆動電圧である折れ線L4(太線)は、駆動パルスとして記憶部37eに保存され、かかる補正駆動電圧を試薬容器62の搬送距離に応じて調整して、試薬トレイ駆動部35を駆動する。
【0043】
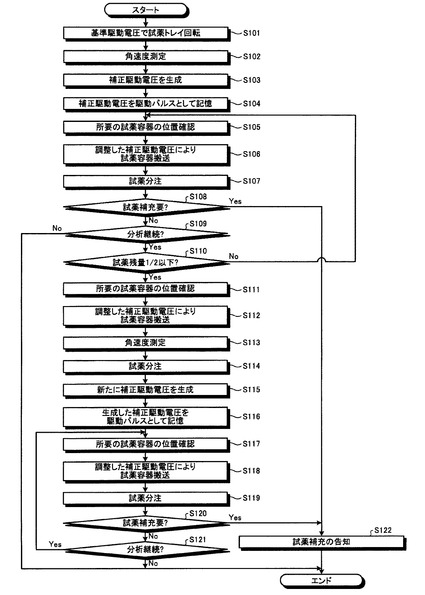
次に、試薬庫3における試薬トレイ33の駆動方法の概要を、図9に示すフローチャートを参照して説明する。ここで、本発明の試薬トレイの駆動方法は、分析装置の電源を入れる初期化時および試薬容器62の挿脱に伴い試薬庫3の蓋31が開けられる度に行なわれ、さらに試薬使用により試薬が減少した場合に円滑な試薬トレイの搬送を可能とするように、たとえば試薬量がスタート時の1/2になった場合に補正駆動電圧を再度生成するように設定することができる。
【0044】
まず、試薬トレイ制御部37dは、記憶部37eに記憶される基準駆動電圧を印加したときの基準駆動電圧時間プロファイルで試薬トレイ駆動部35の駆動により試薬トレイ33を回転させ(ステップS101)、センサ34により角速度を測定する(ステップS102)。生成部37cは、試薬トレイ33の回転移動距離が設定値と同じになる角速度と駆動電圧との関係をもとに、センサ34によって測定された角速度に対応する補正駆動電圧を生成し(ステップS103)、補正駆動電圧を駆動パルスとして記憶部37eに記憶する(ステップS104)。その後、所要の試薬容器62の試薬トレイ33上の位置を位置検知センサ38で確認し(ステップS105)、試薬トレイ制御部37dは、搬送距離に応じて記憶された補正駆動電圧を調整し、これにより試薬トレイ駆動部35を駆動して試薬容器62を搬送する(ステップS106)。所要の試薬容器62を試薬吸引位置Aまで搬送後、試薬分注装置6により試薬を分注し(ステップS107)、試薬補充の必要があるか否かを確認する(ステップS108)。必要がない場合は(ステップS108、No)、引き続き分析を継続するか否かを確認し(ステップS109)、分析を継続する場合は(ステップS109、Yes)、試薬トレイ33上の試薬残量がスタート時の1/2以下になるまで、記憶された補正駆動電圧を印加する駆動電圧時間プロファイルで試薬トレイ駆動部35を制御する(ステップS110、No)。試薬残量は、記憶部37eに記憶される試験項目と分注回数の積算により算出されるが、試薬トレイの搬送時の角速度から推定した試薬残量値を基準値としてもよい。
【0045】
試薬補充が必要な場合は(ステップS108、Yes)、試薬補充が告知される(ステップS122)。告知は、例えばディスプレイ装置に試薬補充の旨を表示し、或いはアラームによって警報音を発する。また、すべての検体について分析が終了した場合は(ステップS109、No)、分析を終了する。
【0046】
一方、試薬残量がスタート時の1/2以下になったときには(ステップS110、Yes)、試薬トレイ33の角速度を設定しなおすために、再度補正駆動電圧が生成される。次の分析のための試薬分注の工程を利用して新たな補正駆動電圧を生成する。すなわち、位置検知センサ38により所要の試薬容器62の位置を確認し(ステップS111)、搬送距離に応じて記憶された補正駆動電圧を調整して試薬容器62を搬送する(ステップS112)。前記搬送時に角加速度を測定し(ステップS113)、搬送された試薬を試薬分注装置6により分注する(ステップS114)。生成部37cは、試薬トレイ33の回転移動距離が設定値と同じになる角速度と駆動電圧との関係をもとに、センサ34によって測定された角速度に対応する新たな補正駆動電圧を生成する(ステップS115)。生成した補正駆動電圧を駆動パルスとして新たに記憶部37eに記憶し(ステップS116)、当該補正駆動電圧を印加する駆動電圧時間プロファイルにより、試薬トレイ制御部37dは、試薬トレイ駆動部35を駆動する。試薬トレイ制御部37dは、その後の分析に必要な試薬容器62の位置を確認し(ステップS117)、搬送距離に応じて保存された補正駆動電圧を調整して試薬容器62を搬送し(ステップS118)、試薬分注装置6により試薬を分注する(ステップS119)。
【0047】
試薬トレイ制御部37dは、試薬補充の必要性を確認し(ステップS120)、補充が必要ない場合は(ステップS120、No)、分析を継続するか否か確認する(ステップS121)。分析を継続する場合は(ステップS121、Yes)、ステップS117〜S119が繰り返され、試薬補充が必要となったとき(ステップS120、Yes)、試薬補充が告知される(ステップS122)。また、すべての検体について分析が終了した場合は、分析を終了する(ステップS121、No)。
【0048】
上述した試薬トレイの駆動処理では、駆動パルスの再設定のタイミングをスタート時の試薬残量の1/2としているが、分注精度のさらなる向上のために補正駆動電圧を生成する回数を、例えばスタート時試薬残量の2/3、1/3の2回またはそれ以上に増やしたり、基準量を試薬満載時の試薬量としてもよい。また、速度情報として、試薬トレイ33の角速度を用いたが、角加速度等の速度情報を用いて行なうことも可能である。
【0049】
(実施の形態2)
次に、本発明の試薬トレイの駆動方法にかかる実施の形態2について、図面を参照して詳細に説明する。実施の形態1では、駆動パルスの再設定時をあらかじめスタート時の試薬残量の半減時に決める制御を行なうものであるのに対し、実施の形態2では角速度を定期的に測定し、許容範囲外となった場合に再設定する制御を行うものである。
【0050】
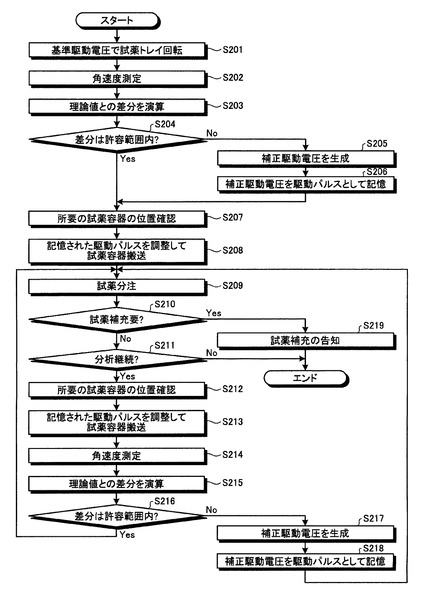
図10は、実施の形態2の試薬庫の構成を示す図であり、図11は実施の形態2の試薬トレイ駆動方法のフローチャートを示す図である。図10に示すように、実施の形態2の方法が使用される試薬庫3’は駆動制御部37’に演算部37fおよび判定部37gを有する以外は、実施の形態1の試薬庫3と同様である。実施の形態2の試薬庫3’では、演算部37fは、検出部37bが検出した速度情報である角速度と、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで試薬トレイ駆動部35により試薬をフルに充填した試薬トレイ33を駆動した場合の角速度(基準値)との差分を演算し、判定部37gは、その差分が許容範囲であるか否かの判定を行なう。許容範囲外である場合に、生成部37cは、前記速度情報および基準駆動電圧に基づき補正駆動電圧を生成し、記憶部37eは、生成部37cで生成された補正駆動電圧を駆動パルスとして記憶する。試薬トレイ制御部37dは、補正駆動電圧を印加した時の駆動電圧時間プロファイルで試薬トレイ駆動部35を駆動する。
【0051】
図11のフローチャートにより、実施の形態2の試薬トレイの駆動方法について説明する。まず、試薬トレイ制御部37dは、記憶部37eに駆動パルスとして記憶される基準駆動電圧を印加したときの基準駆動電圧時間プロファイルで試薬トレイ駆動部35を駆動して試薬トレイ33を搬送し(ステップS201)、センサ34は試薬トレイ33搬送時の角速度を測定する(ステップS202)。演算部37fは記憶部37eに記憶される理論角速度と測定された実測値との差分を演算し(ステップS203)、前記差分が予め設定した許容範囲か否かを判断する(ステップS204)。判定部37gの判定により、前記差分が許容範囲内の場合(ステップS204、Yes)、試薬トレイ駆動部35を駆動する駆動パルスは記憶部37eに記憶されている基準駆動電圧のままであり、試薬トレイ制御部37dは、位置検知センサ38で所要の試薬容器の試薬トレイ上の位置を確認後(ステップS207)、搬送距離に応じて駆動パルスである基準駆動電圧を調整して試薬容器を搬送し(ステップS208)、試薬分注装置6により試薬を分注する(ステップS209)。
【0052】
一方、判定の結果、前記差分が許容範囲を超えている場合(ステップS204、No)、生成部37cは速度情報および基準駆動電圧に基づき補正駆動電圧を生成し(ステップS205)、試薬トレイ駆動部35を駆動する駆動パルスとして当該補正駆動電圧を記憶部37eに記憶させる(ステップS206)。その後、試薬トレイ制御部37dは、位置検知センサ38で所要の試薬容器62の試薬トレイ33上の位置を確認後(ステップS207)、搬送距離に応じて駆動パルスである補正駆動電圧を調整して試薬容器62を搬送し(ステップS208)、試薬分注装置6により試薬を分注する(ステップS209)。
【0053】
試薬トレイ制御部37dは、試薬補充が必要か否かを判断し(ステップS210)、試薬補充が必要な場合は(ステップS210、Yes)、試薬補充が告知される(ステップS219)。試薬補充の必要性がない場合は(ステップS210、No)、試薬トレイ制御部37dは、引き続き分析を継続するか否かを確認する(ステップS211)。分析を継続する場合は(ステップS211、Yes)、試薬トレイ制御部37dは、その後の分注のために位置確認センサ38により所要の試薬容器62の位置を確認し(ステップS212)、搬送距離に応じて駆動パルスとして記憶された補正駆動電圧を調整して試薬容器62を搬送する(ステップS213)。その際センサ34により試薬トレイ33の角速度を測定し(ステップS214)、演算部37fは、記憶部37eに記憶される理論角速度と測定された実測値との差分を演算し(ステップS215)、前記差分が予め設定した許容範囲か否かが判断される(ステップS216)。判定部37gの判定により、前記差分が許容範囲内の場合(ステップS216、Yes)、試薬トレイ駆動部35を駆動する駆動パルスは記憶部37eに記憶されている先の補正駆動電圧のままであり、試薬トレイ制御部37dは、保存されている補正駆動電圧下で試薬トレイ駆動部35を駆動して試薬容器62を搬送し、試薬分注装置6により試薬が分注される(ステップS209)。
【0054】
一方、判定の結果、前記差分が許容範囲を超えている場合(ステップS216、No)、生成部37cは、速度情報および駆動パルスとして記憶される補正駆動電圧に基づき再び新たな補正駆動電圧を生成し(ステップS217)、新たに生成した補正駆動電圧を、試薬トレイ駆動部35を駆動する駆動パルスとして記憶部37eに記憶する(ステップS218)。新たに記憶された補正駆動電圧を印加する駆動電圧時間プロファイルで試薬容器62は搬送され、試薬補充が必要となるか(ステップS210、Yes)、すべての検体について分析が終了するまで(ステップS211、No)、ステップS212〜ステップS212の工程を経て、試薬分注が行なわれる。
【0055】
上記のように、実施の形態2では試薬分注のたびに実測された角速度と理論値との差分が許容範囲か否か判断され、角速度の差分の許容範囲も容易に変更できるので、より精密な搬送制御が可能となる。
【図面の簡単な説明】
【0056】
【図1】本発明の実施の形態1にかかる試薬庫を用いた分析装置の構成を示す模式図である。
【図2】実施の形態1にかかる試薬庫3の構成図である。
【図3】記憶部に駆動パルスとして記憶されている基準駆動電圧を示す図である。
【図4】基準駆動電圧で試薬満載時(L1)および試薬減少時(L2)の試薬トレイを搬送したときのトルクの時間変化を示すグラフである。
【図5】基準駆動電圧で試薬満載時および試薬減少時の試薬トレイを搬送した時の試薬トレイの角速度の時間変化を示すグラフである。
【図6】基準駆動電圧で試薬満載した試薬トレイを搬送時(L1)および補正駆動電圧で試薬量が減少した試薬トレイ搬送時(L3)の試薬トレイの角速度の時間変化を示すグラフである(角速度−時間特性図)。
【図7】駆動電圧値と試薬トレイの角速度の関係を示すグラフである。
【図8】試薬満載時の基準駆動電圧(L1、基準駆動電圧時間プロファイル)と試薬減少時の補正駆動電圧(L4、補正駆動電圧時間プロファイル)を示す図である。
【図9】実施の形態1にかかる試薬トレイ駆動方法のフローチャートを示す図である。
【図10】実施の形態2にかかる試薬庫3’の構成図である。
【図11】実施の形態2にかかる試薬トレイ駆動方法のフローチャートを示す図である。
【符号の説明】
【0057】
1 分析装置
2 検体容器保持部
3、3’ 試薬庫
4 反応テーブル
5 検体分注装置
6 試薬分注装置
7 攪拌部
8 測光部
9 反応容器洗浄部
10 入力部
11 出力部
12 データ生成部
13 制御部
14 記憶部
15a、15b プローブ洗浄部
16a、16b 読取部
20 試薬容器保持部
31 蓋部
32 本体部
33 試薬トレイ
34 センサ
35 試薬トレイ駆動部
36 増幅回路
37 駆動制御部
37a 処理部
37b 検出部
37c 生成部
37d 試薬トレイ制御部
37e 記憶部
37f 演算部
37g 判定部
61 検体容器
62、62a、62b 試薬容器
63 反応容器
71 ラック
A 試薬吸引位置
【技術分野】
【0001】
本発明は、検体および試薬を反応容器に分注し、反応容器内の検体と試薬の間で生じた反応を、光学的に検出する自動分析装置の試薬庫、自動分析装置および試薬トレイ駆動方法に関する。
【背景技術】
【0002】
従来、血液や尿などの検体を自動的に分析する装置として、検体および試薬を反応容器に分注し、反応容器内の検体と試薬の間で生じた反応を光学的に検出する自動分析装置が使用されている。このような自動分析装置では、使用する複数の試薬を個別に収容する試薬容器群を、それぞれ試薬庫内の試薬トレイに収納し、検体や分析項目に応じて所要の試薬を収容した試薬容器を分注プローブによる分注位置まで搬送して分注している。この試薬容器の搬送は、試薬トレイ駆動部により行なわれ、試薬トレイ駆動部を駆動するための駆動パルスは、試薬容器の搬送距離に応じて調整制御される。
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、試薬容器および試薬量ともフルに充填された場合を基準として設定された基準駆動パルスで試薬トレイ駆動部を駆動すると、収納する試薬容器数または試薬量が減少した場合に、駆動トルクの低下により試薬トレイの回転速度が設定値より高くなり分注位置で急停止されることがある。このように試薬トレイが急停止されると、試薬液面に波立ちや気泡が発生するため、分注プローブによる試薬吸引の際、波立ちや気泡によって液面を誤検知し、正確な分注が妨げられることがあった。
【0004】
本発明は、上記した従来技術の欠点に鑑みてなされたものであり、試薬容器の出し入れや試薬使用による試薬量の減少に際しても、試薬トレイを円滑に搬送でき、試薬の分注を正確に行ない得る試薬庫、自動分析装置および試薬トレイ駆動方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するために、本発明にかかる試薬庫は、試薬トレイ駆動部によって試薬トレイを回転させ、収容する試薬容器を分注プローブの試薬吸引位置まで搬送する試薬庫であって、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定する測定手段と、前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、前記測定手段によって測定された速度情報に対応する補正駆動電圧を求める生成手段と、前記生成手段によって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動する駆動制御手段と、を備えることを特徴とする。
【0006】
また、本発明の試薬庫は、上記発明において、前記関係をもとに、前記基準駆動電圧時の速度情報と前記測定手段によって測定された速度情報との差を演算する演算手段と、前記演算手段によって演算された差が所定の許容範囲であるか否かを判定する判定手段と、を備え、前記生成手段は、前記差が所定の許容範囲を超える場合に前記関係をもとに前記補正駆動電圧を求め、前記駆動制御手段は、前記生成手段によって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする。
【0007】
また、本発明の試薬庫は、上記発明において、前記基準駆動電圧時間プロファイルをデフォルトとして記憶し、前記生成手段によって求められた駆動電圧時間プロファイルに逐次更新する記憶手段を備え、前記駆動制御手段は、前記記憶手段に記憶されている基準駆動電圧プロファイルあるいは駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする。
【0008】
また、本発明の試薬庫は、上記発明において、試薬残量を算出する試薬残量算出手段を備え、前記生成手段は、初期化時および前記試薬残量が所定値になった場合に前記補正駆動電圧を求めることを特徴とする。
【0009】
また、本発明の試薬庫は、上記発明において、前記試薬残量算出手段は、試験項目と分注回数との積算によって前記試薬残量を算出することを特徴とする。
【0010】
また、本発明の試薬庫は、上記発明において、前記試薬残量算出手段は、前記測定手段によって測定された速度情報をもとに前記試薬残量を推定演算することを特徴とする。
【0011】
また、本発明の自動分析装置は、検体と試薬とを反応させることによって前記検体の成分を光学的に分析する自動分析装置であって、液体としての前記試薬を収容する試薬容器を試薬トレイに収納し、試薬吸引位置まで搬送する前記に記載の試薬庫を備えたことを特徴とする。
【0012】
また、本発明の試薬トレイ駆動方法は、試薬トレイ駆動部によって試薬トレイを回転させ、収容する試薬容器を分注プローブの試薬吸引位置まで搬送する試薬トレイ駆動方法であって、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定する測定ステップと、前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、前記測定ステップによって測定された速度情報に対応する補正駆動電圧を求める生成ステップと、前記生成ステップによって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動する駆動制御ステップと、を含むことを特徴とする。
【0013】
また、本発明の試薬トレイ駆動方法は、上記の発明において、前記関係をもとに、前記基準駆動電圧時の速度情報と前記測定手段によって測定された速度情報との差を演算する演算ステップと、前記演算ステップによって演算された差が所定の許容範囲であるか否かを判定する判定ステップと、を備え、前記生成ステップは、前記差が所定の許容範囲を超える場合に前記関係をもとに前記補正駆動電圧を求め、前記駆動制御ステップは、前記生成ステップによって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする。
【0014】
また、本発明の試薬トレイ駆動方法は、上記の発明において、前記基準駆動電圧時間プロファイルをデフォルトとして記憶し、前記生成ステップによって求められた駆動電圧時間プロファイルに逐次更新する記憶ステップを備え、前記駆動制御ステップは、前記記憶ステップに記憶されている基準駆動電圧プロファイルあるいは駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする。
【0015】
また、本発明の試薬トレイ駆動方法は、上記の発明において、試薬残量を算出する試薬残量算出ステップを備え、前記生成ステップは、初期化時および前記試薬残量が所定値になった場合に前記補正駆動電圧を求めることを特徴とする。
【0016】
また、本発明の試薬トレイ駆動方法は、上記の発明において、前記試薬残量算出ステップは、試験項目と分注回数との積算によって前記試薬残量を算出することを特徴とする。
【0017】
また、本発明の試薬トレイ駆動方法は、上記の発明において、前記試薬残量算出ステップは、前記測定ステップによって測定された速度情報をもとに前記試薬残量を推定演算することを特徴とする。
【発明の効果】
【0018】
本発明にかかる試薬庫、自動分析装置および試薬トレイ駆動方法は、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定し、前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、測定された速度情報に対応する補正駆動電圧を求め、当該補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することにより、試薬トレイの急停止による試薬の波立ちや泡立ちを抑制することが可能となり、検体の分析精度を高度に維持することができるという効果を奏する。
【発明を実施するための最良の形態】
【0019】
以下、図面を参照して、本発明に係る試薬庫、自動分析装置および試薬トレイ駆動方法の好適な実施の形態について説明する。なお、この実施の形態により本発明が限定されるものではない。また、図面の記載において、同一部分には同一の符号を付している。
【0020】
(実施の形態1)
図1は、本発明の実施の形態1にかかる試薬庫を用いた分析装置の構成を示す模式図である。同図に示す自動分析装置1は、検体(試料)および試薬を反応容器63にそれぞれ分注し、その反応容器63内で生じる反応を光学的に測定する測定ユニット101と、測定ユニット101を含む自動分析装置1の制御を行うとともに測定ユニット101における測定結果の分析を行うデータ処理ユニット201とを有し、これら2つのユニットが連携することによって複数の検体の成分の生化学的な分析を自動的かつ連続的に行う装置である。
【0021】
測定ユニット101は、検体を収容する検体容器61が搭載された複数のラック71を収納する検体容器保持部2と、試薬容器62a、62b等(以下試薬容器62a、62b等を総称して試薬容器62という)を収納する試薬庫3と、試薬容器62および検体容器61に貼付された情報をそれぞれ読み取る読取部16a、16bと、検体と試薬とを反応させる反応容器63を保持する反応テーブル4と、検体容器保持部2が保持する検体容器61が収容する検体を反応容器63に分注する検体分注装置5と、試薬庫3に収納される試薬容器62が収容する試薬を反応容器63に分注する試薬分注装置6と、反応容器63内部の液体を攪拌する攪拌部7と、光源から照射されて反応容器63を通過した光を受光して所定の波長成分の強度等を測定する測光部8と、反応容器63の洗浄を行う反応容器洗浄部9と、検体分注装置5および試薬分注装置6の分注プローブを洗浄するプローブ洗浄部15a、15bと、を備える。
【0022】
検体容器61が搭載されたラック71は、駆動手段によって矢印で示す方向に搬送される。ラック71の搬送により、検体容器61は検体分注装置5によって検体が吸引される検体吸引位置に搬送される。検体容器61には、収容された検体の種類や分析項目に関する検体情報を有する識別ラベル(図示せず)が貼り付けられ、検体容器保持部2は、検体容器61の識別ラベルの情報を読み取る読取部16bを備えている。
【0023】
検体分注装置5は、検体の吸引および吐出を行なう分注プローブが先端部に取り付けられ、鉛直方向への昇降および自身の基端部を通過する鉛直線を中心軸とする回転を自在に行なうアームを備える。検体分注装置5は、検体容器保持部2と反応テーブル4との間に設けられ、ラック71によって検体吸引位置に搬送された検体容器61内の検体を分注プローブによって吸引し、アームを旋回させ、反応テーブル4によって検体吐出位置に搬送された反応容器63に分注して検体を所定タイミングで反応テーブル4上の反応容器63内に移送する。
【0024】
試薬分注装置6は、試薬の吸引および吐出を行なう分注プローブが先端部に取り付けられ、鉛直方向への昇降および自身の基端部を通過する鉛直線を中心軸とする回転を自在に行なうアームを備える。試薬分注装置6は、試薬庫3と反応テーブル4との間に設けられ、試薬庫3によって試薬吸引位置Aに搬送された試薬容器62内の試薬を分注ノズルによって吸引し、アームを旋回させ、反応テーブル4によって試薬吐出位置に搬送された反応容器63に分注して試薬を所定タイミングで反応テーブル4上の反応容器63内に移送する。
【0025】
プローブ洗浄部15a、15bは、検体容器保持部2と反応テーブル4との間、および試薬庫3と反応テーブル4の間であって、検体分注装置5および試薬分注装置6における分注プローブの水平移動の軌跡の途中位置に設けられ、分注プローブを洗浄して検体および試薬のキャリーオーバーを防止する。
【0026】
反応テーブル4は、駆動手段によって矢印で示す方向に回転され、外周には周方向に沿って複数の反応容器収納部が等間隔で設けられている。各反応容器収納部には、反応容器63が着脱自在に収納される。また、反応テーブル4の回転により、反応容器63は試薬分注装置6によって試薬が吐出される試薬吐出位置、または検体分注装置5によって検体が吐出される検体吐出位置に搬送される。反応テーブル4は、各収納部の半径方向両側に測定光が通過する開口が形成されている。反応テーブル4の外周近傍には、攪拌部7、測光部8及び反応容器洗浄部9が配置され、反応液の攪拌、分析、または反応容器の洗浄の際に、駆動手段により反応容器63は所定の位置に搬送される。
【0027】
反応容器63は、測光部8の光源から出射された分析光に含まれる光の80%以上を透過する透明素材、例えば、耐熱ガラスを含むガラス、環状オレフィンやポリスチレン等の合成樹脂が使用される。
【0028】
測光部8は、反応テーブル4の外周近傍に配置され、反応容器63に保持された液体を分析する分析光を出射する光源と、液体を保持した反応容器63を透過した分析光を分光して受光する受光部とを有している。測光部8は、前記光源と受光部が反応テーブル4の反応容器収納部を挟んで半径方向に対向する位置に配置されている。
【0029】
反応容器洗浄部9は、反応容器63から液体や洗浄液を排出する排出手段と、洗浄液の分注手段とを有している。反応容器洗浄部9は、測光終了後の反応容器63から測光後の液体を排出した後、洗浄液を分注する。反応容器洗浄部9は、洗浄液の分注と排出との動作を複数回繰り返すことにより、反応容器63の内部を洗浄する。このようにして洗浄された反応容器63は、再度、新たな検体の分析に使用される。
【0030】
攪拌部7は、反応容器63に保持された液体を攪拌する装置であり、パルスモータ、アーム、カム、攪拌板等を有している。
【0031】
データ処理ユニット201は、キーボードやマウスなどを有し、検体の分析に必要な情報や自動分析装置1の操作情報が入力される入力部10と、ディスプレイやプリンタを有し、検体の分析に関する情報等を出力する出力部11と、測定ユニット101における測定結果に基づいて反応容器63内部の液体の吸光度を算出したり、吸光度の算出結果と検量線や分析パラメータ等の各種情報とを用いて反応容器63内部の液体の成分を算出したりするデータ生成部12と、自動分析装置1の制御を行う制御部13と、検体の分析に関する情報を含む各種情報を記憶する記憶部14と、を備える。データ処理ユニット201は、CPU、ROM、RAM等を具備したコンピュータによって実現される。
【0032】
次に、図2に示す試薬庫の構成図を用いて、本発明の試薬庫について詳細に説明する。試薬庫3は、試薬容器保持部20と、試薬トレイ駆動部35と、増幅回路36と、駆動制御部37を備えている。
【0033】
試薬容器保持部20は、試薬を収容する試薬容器62と、試薬容器62を収納する試薬トレイ33と、試薬トレイ33の回転速度情報を検知するセンサ34と、試薬容器62の位置を検知する位置検知センサ38と、試薬トレイ33を側面および底面で包み込む本体部32と、本体部32にかぶせる蓋部31からなる。
【0034】
センサ34は、試薬トレイ33の上面側に形成されたマーカを、当該マーカの上部からエンコーダで検知して、試薬トレイ33の角速度または角加速度などの速度情報を検出し、検出した信号を増幅回路36に出力する。増幅回路36は、センサ34から出力される検知信号(アナログ)を増幅し、増幅した圧力信号を駆動制御部37へ出力する。
【0035】
駆動制御部37は、試薬トレイ駆動部35を駆動するための制御手段であり、CPU、RAC、ROM等を用いて構成される。制御搬送部37は、処理部37a、検出部37b、生成部37c、試薬トレイ制御部37dおよび記憶部37eを備えている。
【0036】
処理部37aは、増幅回路36から入力される検知信号(アナログ)をデジタル信号に変換処理する部分で、例えばA/D変換器が使用される。検出部37bは、処理部37aによってデジタル信号に変換された検知信号から試薬トレイ33の角速度または角加速度等の速度情報を検出する。生成部37cは、角速度時間プロファイルに基づき、試薬トレイ駆動部35の駆動パルスである基準駆動電圧を補正して補正駆動電圧を生成する。試薬トレイ制御部37dは、駆動パルスとして記憶される基準駆動電圧または補正駆動電圧下で前記試薬トレイ駆動部35を駆動して試薬トレイ33を回転させる。記憶部37eは、基準駆動電圧および生成部37cにより生成された補正駆動電圧を駆動パルスとして記憶する。
【0037】
基準駆動電圧は、試薬を満載した試薬容器62を試薬庫3内の試薬容器収納部全てに搭載した状態における試薬トレイ駆動部35の駆動パルスであり、たとえば試薬容器1個分を搬送する際の基準駆動電圧が記憶部37eに記憶されている。この基準駆動電圧に基づき、所要の試薬容器の搬送距離に応じて基準駆動電圧を調整した駆動パルスが試薬トレイ制御部37dから出力されることにより、試薬トレイ駆動部35は駆動される。
【0038】
図3は、基準駆動電圧を示す図である。台形状の折れ線L2(太線)が試薬容器1ポジション分の基準駆動電圧であり(図1の試薬容器62aから試薬吸引位置Aまでが1ポジション)、記憶部37eには、図3に示す試薬容器1ポジション分の基準駆動電圧(折れ線L2)のみが記憶されている。そして、たとえば試薬容器3ポジション分試薬トレイを搬送する場合(図1の試薬容器62bから試薬吸引位置Aまでが3ポジション)、試薬トレイ制御部37dは記憶部37eに記憶されている基準駆動電圧L2を調整した駆動パルスL1(細線)を発信して、試薬トレイ駆動部35を制御する。このように、試薬トレイ33の搬送距離に応じて、試薬トレイ制御部37dにより前記基準駆動電圧を調整した制御パルスが発信され、試薬トレイは搬送される。なお、駆動制御部37の試薬トレイ制御部37dおよび記憶部37eは、データ処理ユニット201の制御部13および記憶部14が兼ねていても良い。
【0039】
前記基準駆動電圧で試薬トレイ駆動部35の駆動制御を続けると、試薬トレイ33に収納される試薬の量の減少により、試薬トレイ駆動部35の駆動トルクは減少し、これに伴い試薬トレイ33の回転速度は上昇する。図4は、基準駆動電圧で試薬満載時および試薬減少時の試薬トレイ33を回転したときのトルクの時間変化を示すグラフ、図5は同条件下での試薬トレイ33の角速度の時間変化を示すグラフである。
【0040】
図4に示すように、試薬トレイ駆動部35の駆動トルクは、駆動開始時が最も高く、試薬トレイが等速になる時間t1まで一定の割合で減少し、試薬トレイ33の等速運動時(t1〜t2)は一定であり、その後減速のために再び一定の割合で減少する。基準駆動パルスで試薬満載時の試薬トレイ駆動部35を駆動した場合、等速運動時のトルクはτ1であるのに対し、同じ基準駆動パルスで終了する試薬量が減少にした試薬トレイ33を駆動すると、トルクの折れ線は相対的に下方に移動し、等速運動時のトルクもτ2まで減少する。試薬トレイ33に収容する試薬量が減少すればするほど、トルク−時間特性図は下方に移動する。
【0041】
一方、基準駆動電圧で試薬トレイ駆動部35を駆動したときの試薬トレイ33の角速度は、図5に示すように、時間t1まで等加速度的に増加し、時間t1〜t2の等速運動の後、等加速度的に減少する台形型になる。基準駆動電圧で試薬トレイ駆動部35を駆動したときの、試薬を満載した試薬トレイ33の等速運動時の角速度はω1であるのに対し、試薬量が減少した場合の試薬トレイ33の等速運動時の角速度はω2まで増加する。したがって、試薬トレイ33に収容する試薬量が減少すると、設計上は時間t4で試薬吸引位置Aに所要の試薬容器62が搬送される予定が、時間t3で試薬容器62は試薬吸引位置Aに搬送されることになり、試薬容器62を試薬吸引位置Aで停止させるために、試薬トレイ33は時間t3で急停止されることになる。このような急停止を防止するため、基準駆動電圧を印加したときの基準駆動電圧時間プロファイルで試薬トレイ33を回転させ、センサ34により試薬トレイ33の角速度または各加速度を測定し、試薬トレイ33の回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、センサ34によって測定された速度情報に対応する補正駆動電圧を求める。求めた補正駆動電圧を印加する駆動電圧時間プロファイルで試薬トレイ33を回転駆動することにより、試薬トレイ33を設計上の理論値に近似する駆動トルクや角速度で駆動することが可能となり、試薬トレイ33の急停止を抑制することが可能となる。
【0042】
補正駆動電圧は、以下のようにして生成される。図6は、試薬満載時の試薬トレイ33を基準駆動電圧で搬送させたとき(折れ線L1)、および試薬減少時の試薬トレイ33を補正駆動電圧で搬送させたとき(折れ線L3)の試薬トレイ33の角速度の時間変化を示すグラフである。試薬満載時または試薬減少時のいずれの場合も試薬トレイ33(試薬容器62)の搬送距離は同一であり、グラフ上台形で表される面積は同一となる。したがって、生成部37cは、センサ34により測定された角速度または角加速度を含む速度情報に基づき、折れ線L1が形成する台形の面積と同じになる折れ線L3の角速度ω3と時間t7およびt8を求める。そして、図7に示す駆動電圧値と試薬トレイの角速度との関係(基準駆動電圧―理論速度値特性図)を示すグラフから、角速度ω3となる電圧V3を求め、図8の補正駆動電圧を生成する。図8に示す補正駆動電圧である折れ線L4(太線)は、駆動パルスとして記憶部37eに保存され、かかる補正駆動電圧を試薬容器62の搬送距離に応じて調整して、試薬トレイ駆動部35を駆動する。
【0043】
次に、試薬庫3における試薬トレイ33の駆動方法の概要を、図9に示すフローチャートを参照して説明する。ここで、本発明の試薬トレイの駆動方法は、分析装置の電源を入れる初期化時および試薬容器62の挿脱に伴い試薬庫3の蓋31が開けられる度に行なわれ、さらに試薬使用により試薬が減少した場合に円滑な試薬トレイの搬送を可能とするように、たとえば試薬量がスタート時の1/2になった場合に補正駆動電圧を再度生成するように設定することができる。
【0044】
まず、試薬トレイ制御部37dは、記憶部37eに記憶される基準駆動電圧を印加したときの基準駆動電圧時間プロファイルで試薬トレイ駆動部35の駆動により試薬トレイ33を回転させ(ステップS101)、センサ34により角速度を測定する(ステップS102)。生成部37cは、試薬トレイ33の回転移動距離が設定値と同じになる角速度と駆動電圧との関係をもとに、センサ34によって測定された角速度に対応する補正駆動電圧を生成し(ステップS103)、補正駆動電圧を駆動パルスとして記憶部37eに記憶する(ステップS104)。その後、所要の試薬容器62の試薬トレイ33上の位置を位置検知センサ38で確認し(ステップS105)、試薬トレイ制御部37dは、搬送距離に応じて記憶された補正駆動電圧を調整し、これにより試薬トレイ駆動部35を駆動して試薬容器62を搬送する(ステップS106)。所要の試薬容器62を試薬吸引位置Aまで搬送後、試薬分注装置6により試薬を分注し(ステップS107)、試薬補充の必要があるか否かを確認する(ステップS108)。必要がない場合は(ステップS108、No)、引き続き分析を継続するか否かを確認し(ステップS109)、分析を継続する場合は(ステップS109、Yes)、試薬トレイ33上の試薬残量がスタート時の1/2以下になるまで、記憶された補正駆動電圧を印加する駆動電圧時間プロファイルで試薬トレイ駆動部35を制御する(ステップS110、No)。試薬残量は、記憶部37eに記憶される試験項目と分注回数の積算により算出されるが、試薬トレイの搬送時の角速度から推定した試薬残量値を基準値としてもよい。
【0045】
試薬補充が必要な場合は(ステップS108、Yes)、試薬補充が告知される(ステップS122)。告知は、例えばディスプレイ装置に試薬補充の旨を表示し、或いはアラームによって警報音を発する。また、すべての検体について分析が終了した場合は(ステップS109、No)、分析を終了する。
【0046】
一方、試薬残量がスタート時の1/2以下になったときには(ステップS110、Yes)、試薬トレイ33の角速度を設定しなおすために、再度補正駆動電圧が生成される。次の分析のための試薬分注の工程を利用して新たな補正駆動電圧を生成する。すなわち、位置検知センサ38により所要の試薬容器62の位置を確認し(ステップS111)、搬送距離に応じて記憶された補正駆動電圧を調整して試薬容器62を搬送する(ステップS112)。前記搬送時に角加速度を測定し(ステップS113)、搬送された試薬を試薬分注装置6により分注する(ステップS114)。生成部37cは、試薬トレイ33の回転移動距離が設定値と同じになる角速度と駆動電圧との関係をもとに、センサ34によって測定された角速度に対応する新たな補正駆動電圧を生成する(ステップS115)。生成した補正駆動電圧を駆動パルスとして新たに記憶部37eに記憶し(ステップS116)、当該補正駆動電圧を印加する駆動電圧時間プロファイルにより、試薬トレイ制御部37dは、試薬トレイ駆動部35を駆動する。試薬トレイ制御部37dは、その後の分析に必要な試薬容器62の位置を確認し(ステップS117)、搬送距離に応じて保存された補正駆動電圧を調整して試薬容器62を搬送し(ステップS118)、試薬分注装置6により試薬を分注する(ステップS119)。
【0047】
試薬トレイ制御部37dは、試薬補充の必要性を確認し(ステップS120)、補充が必要ない場合は(ステップS120、No)、分析を継続するか否か確認する(ステップS121)。分析を継続する場合は(ステップS121、Yes)、ステップS117〜S119が繰り返され、試薬補充が必要となったとき(ステップS120、Yes)、試薬補充が告知される(ステップS122)。また、すべての検体について分析が終了した場合は、分析を終了する(ステップS121、No)。
【0048】
上述した試薬トレイの駆動処理では、駆動パルスの再設定のタイミングをスタート時の試薬残量の1/2としているが、分注精度のさらなる向上のために補正駆動電圧を生成する回数を、例えばスタート時試薬残量の2/3、1/3の2回またはそれ以上に増やしたり、基準量を試薬満載時の試薬量としてもよい。また、速度情報として、試薬トレイ33の角速度を用いたが、角加速度等の速度情報を用いて行なうことも可能である。
【0049】
(実施の形態2)
次に、本発明の試薬トレイの駆動方法にかかる実施の形態2について、図面を参照して詳細に説明する。実施の形態1では、駆動パルスの再設定時をあらかじめスタート時の試薬残量の半減時に決める制御を行なうものであるのに対し、実施の形態2では角速度を定期的に測定し、許容範囲外となった場合に再設定する制御を行うものである。
【0050】
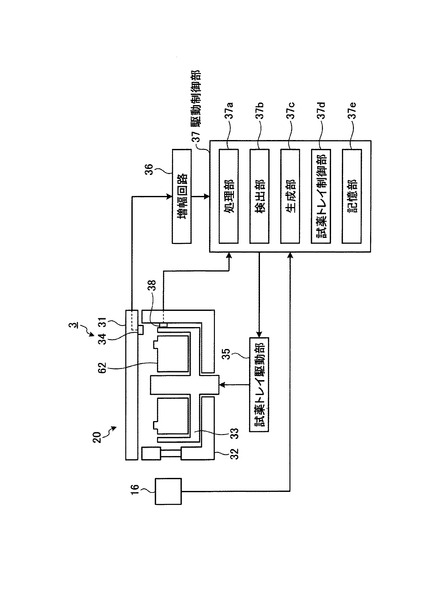
図10は、実施の形態2の試薬庫の構成を示す図であり、図11は実施の形態2の試薬トレイ駆動方法のフローチャートを示す図である。図10に示すように、実施の形態2の方法が使用される試薬庫3’は駆動制御部37’に演算部37fおよび判定部37gを有する以外は、実施の形態1の試薬庫3と同様である。実施の形態2の試薬庫3’では、演算部37fは、検出部37bが検出した速度情報である角速度と、基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで試薬トレイ駆動部35により試薬をフルに充填した試薬トレイ33を駆動した場合の角速度(基準値)との差分を演算し、判定部37gは、その差分が許容範囲であるか否かの判定を行なう。許容範囲外である場合に、生成部37cは、前記速度情報および基準駆動電圧に基づき補正駆動電圧を生成し、記憶部37eは、生成部37cで生成された補正駆動電圧を駆動パルスとして記憶する。試薬トレイ制御部37dは、補正駆動電圧を印加した時の駆動電圧時間プロファイルで試薬トレイ駆動部35を駆動する。
【0051】
図11のフローチャートにより、実施の形態2の試薬トレイの駆動方法について説明する。まず、試薬トレイ制御部37dは、記憶部37eに駆動パルスとして記憶される基準駆動電圧を印加したときの基準駆動電圧時間プロファイルで試薬トレイ駆動部35を駆動して試薬トレイ33を搬送し(ステップS201)、センサ34は試薬トレイ33搬送時の角速度を測定する(ステップS202)。演算部37fは記憶部37eに記憶される理論角速度と測定された実測値との差分を演算し(ステップS203)、前記差分が予め設定した許容範囲か否かを判断する(ステップS204)。判定部37gの判定により、前記差分が許容範囲内の場合(ステップS204、Yes)、試薬トレイ駆動部35を駆動する駆動パルスは記憶部37eに記憶されている基準駆動電圧のままであり、試薬トレイ制御部37dは、位置検知センサ38で所要の試薬容器の試薬トレイ上の位置を確認後(ステップS207)、搬送距離に応じて駆動パルスである基準駆動電圧を調整して試薬容器を搬送し(ステップS208)、試薬分注装置6により試薬を分注する(ステップS209)。
【0052】
一方、判定の結果、前記差分が許容範囲を超えている場合(ステップS204、No)、生成部37cは速度情報および基準駆動電圧に基づき補正駆動電圧を生成し(ステップS205)、試薬トレイ駆動部35を駆動する駆動パルスとして当該補正駆動電圧を記憶部37eに記憶させる(ステップS206)。その後、試薬トレイ制御部37dは、位置検知センサ38で所要の試薬容器62の試薬トレイ33上の位置を確認後(ステップS207)、搬送距離に応じて駆動パルスである補正駆動電圧を調整して試薬容器62を搬送し(ステップS208)、試薬分注装置6により試薬を分注する(ステップS209)。
【0053】
試薬トレイ制御部37dは、試薬補充が必要か否かを判断し(ステップS210)、試薬補充が必要な場合は(ステップS210、Yes)、試薬補充が告知される(ステップS219)。試薬補充の必要性がない場合は(ステップS210、No)、試薬トレイ制御部37dは、引き続き分析を継続するか否かを確認する(ステップS211)。分析を継続する場合は(ステップS211、Yes)、試薬トレイ制御部37dは、その後の分注のために位置確認センサ38により所要の試薬容器62の位置を確認し(ステップS212)、搬送距離に応じて駆動パルスとして記憶された補正駆動電圧を調整して試薬容器62を搬送する(ステップS213)。その際センサ34により試薬トレイ33の角速度を測定し(ステップS214)、演算部37fは、記憶部37eに記憶される理論角速度と測定された実測値との差分を演算し(ステップS215)、前記差分が予め設定した許容範囲か否かが判断される(ステップS216)。判定部37gの判定により、前記差分が許容範囲内の場合(ステップS216、Yes)、試薬トレイ駆動部35を駆動する駆動パルスは記憶部37eに記憶されている先の補正駆動電圧のままであり、試薬トレイ制御部37dは、保存されている補正駆動電圧下で試薬トレイ駆動部35を駆動して試薬容器62を搬送し、試薬分注装置6により試薬が分注される(ステップS209)。
【0054】
一方、判定の結果、前記差分が許容範囲を超えている場合(ステップS216、No)、生成部37cは、速度情報および駆動パルスとして記憶される補正駆動電圧に基づき再び新たな補正駆動電圧を生成し(ステップS217)、新たに生成した補正駆動電圧を、試薬トレイ駆動部35を駆動する駆動パルスとして記憶部37eに記憶する(ステップS218)。新たに記憶された補正駆動電圧を印加する駆動電圧時間プロファイルで試薬容器62は搬送され、試薬補充が必要となるか(ステップS210、Yes)、すべての検体について分析が終了するまで(ステップS211、No)、ステップS212〜ステップS212の工程を経て、試薬分注が行なわれる。
【0055】
上記のように、実施の形態2では試薬分注のたびに実測された角速度と理論値との差分が許容範囲か否か判断され、角速度の差分の許容範囲も容易に変更できるので、より精密な搬送制御が可能となる。
【図面の簡単な説明】
【0056】
【図1】本発明の実施の形態1にかかる試薬庫を用いた分析装置の構成を示す模式図である。
【図2】実施の形態1にかかる試薬庫3の構成図である。
【図3】記憶部に駆動パルスとして記憶されている基準駆動電圧を示す図である。
【図4】基準駆動電圧で試薬満載時(L1)および試薬減少時(L2)の試薬トレイを搬送したときのトルクの時間変化を示すグラフである。
【図5】基準駆動電圧で試薬満載時および試薬減少時の試薬トレイを搬送した時の試薬トレイの角速度の時間変化を示すグラフである。
【図6】基準駆動電圧で試薬満載した試薬トレイを搬送時(L1)および補正駆動電圧で試薬量が減少した試薬トレイ搬送時(L3)の試薬トレイの角速度の時間変化を示すグラフである(角速度−時間特性図)。
【図7】駆動電圧値と試薬トレイの角速度の関係を示すグラフである。
【図8】試薬満載時の基準駆動電圧(L1、基準駆動電圧時間プロファイル)と試薬減少時の補正駆動電圧(L4、補正駆動電圧時間プロファイル)を示す図である。
【図9】実施の形態1にかかる試薬トレイ駆動方法のフローチャートを示す図である。
【図10】実施の形態2にかかる試薬庫3’の構成図である。
【図11】実施の形態2にかかる試薬トレイ駆動方法のフローチャートを示す図である。
【符号の説明】
【0057】
1 分析装置
2 検体容器保持部
3、3’ 試薬庫
4 反応テーブル
5 検体分注装置
6 試薬分注装置
7 攪拌部
8 測光部
9 反応容器洗浄部
10 入力部
11 出力部
12 データ生成部
13 制御部
14 記憶部
15a、15b プローブ洗浄部
16a、16b 読取部
20 試薬容器保持部
31 蓋部
32 本体部
33 試薬トレイ
34 センサ
35 試薬トレイ駆動部
36 増幅回路
37 駆動制御部
37a 処理部
37b 検出部
37c 生成部
37d 試薬トレイ制御部
37e 記憶部
37f 演算部
37g 判定部
61 検体容器
62、62a、62b 試薬容器
63 反応容器
71 ラック
A 試薬吸引位置
【特許請求の範囲】
【請求項1】
試薬トレイ駆動部によって試薬トレイを回転させ、収容する試薬容器を分注プローブの試薬吸引位置まで搬送する試薬庫であって、
基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定する測定手段と、
前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、前記測定手段によって測定された速度情報に対応する補正駆動電圧を求める生成手段と、
前記生成手段によって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動する駆動制御手段と、
を備えることを特徴とする試薬庫。
【請求項2】
前記関係をもとに、前記基準駆動電圧時の速度情報と前記測定手段によって測定された速度情報との差を演算する演算手段と、
前記演算手段によって演算された差が所定の許容範囲であるか否かを判定する判定手段と、
を備え、
前記生成手段は、前記差が所定の許容範囲を超える場合に前記関係をもとに前記補正駆動電圧を求め、
前記駆動制御手段は、前記生成手段によって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする試薬庫。
【請求項3】
前記基準駆動電圧時間プロファイルをデフォルトとして記憶し、前記生成手段によって求められた駆動電圧時間プロファイルに逐次更新する記憶手段を備え、
前記駆動制御手段は、前記記憶手段に記憶されている基準駆動電圧プロファイルあるいは駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする請求項1または2に記載の試薬庫。
【請求項4】
試薬残量を算出する試薬残量算出手段を備え、
前記生成手段は、初期化時および前記試薬残量が所定値になった場合に前記補正駆動電圧を求めることを特徴とする請求項1〜3のいずれか一つに記載の試薬庫。
【請求項5】
前記試薬残量算出手段は、試験項目と分注回数との積算によって前記試薬残量を算出することを特徴とする請求項4に記載の試薬庫。
【請求項6】
前記試薬残量算出手段は、前記測定手段によって測定された速度情報をもとに前記試薬残量を推定演算することを特徴とする請求項4に記載の試薬庫。
【請求項7】
検体と試薬とを反応させることによって前記検体の成分を光学的に分析する自動分析装置であって、
液体としての前記試薬を収容する試薬容器を試薬トレイに収納し、試薬吸引位置まで搬送する請求項1〜6のいずれか一つに記載の試薬庫を備えたことを特徴とする自動分析装置。
【請求項8】
試薬トレイ駆動部によって試薬トレイを回転させ、収容する試薬容器を分注プローブの試薬吸引位置まで搬送する試薬トレイ駆動方法であって、
基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定する測定ステップと、
前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、前記測定ステップによって測定された速度情報に対応する補正駆動電圧を求める生成ステップと、
前記生成ステップによって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動する駆動制御ステップと、
を含むことを特徴とする試薬トレイ駆動方法。
【請求項9】
前記関係をもとに、前記基準駆動電圧時の速度情報と前記測定手段によって測定された速度情報との差を演算する演算ステップと、
前記演算ステップによって演算された差が所定の許容範囲であるか否かを判定する判定ステップと、
を備え、
前記生成ステップは、前記差が所定の許容範囲を超える場合に前記関係をもとに前記補正駆動電圧を求め、
前記駆動制御ステップは、前記生成ステップによって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする試薬トレイ駆動方法。
【請求項10】
前記基準駆動電圧時間プロファイルをデフォルトとして記憶し、前記生成ステップによって求められた駆動電圧時間プロファイルに逐次更新する記憶ステップを備え、
前記駆動制御ステップは、前記記憶ステップに記憶されている基準駆動電圧プロファイルあるいは駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする請求項8または9に記載の試薬トレイ駆動方法。
【請求項11】
試薬残量を算出する試薬残量算出ステップを備え、
前記生成ステップは、初期化時および前記試薬残量が所定値になった場合に前記補正駆動電圧を求めることを特徴とする請求項8〜10のいずれか一つに記載の試薬トレイ駆動方法。
【請求項12】
前記試薬残量算出ステップは、試験項目と分注回数との積算によって前記試薬残量を算出することを特徴とする請求項11に記載の試薬トレイ駆動方法。
【請求項13】
前記試薬残量算出ステップは、前記測定ステップによって測定された速度情報をもとに前記試薬残量を推定演算することを特徴とする請求項11に記載の試薬トレイ駆動方法。
【請求項1】
試薬トレイ駆動部によって試薬トレイを回転させ、収容する試薬容器を分注プローブの試薬吸引位置まで搬送する試薬庫であって、
基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定する測定手段と、
前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、前記測定手段によって測定された速度情報に対応する補正駆動電圧を求める生成手段と、
前記生成手段によって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動する駆動制御手段と、
を備えることを特徴とする試薬庫。
【請求項2】
前記関係をもとに、前記基準駆動電圧時の速度情報と前記測定手段によって測定された速度情報との差を演算する演算手段と、
前記演算手段によって演算された差が所定の許容範囲であるか否かを判定する判定手段と、
を備え、
前記生成手段は、前記差が所定の許容範囲を超える場合に前記関係をもとに前記補正駆動電圧を求め、
前記駆動制御手段は、前記生成手段によって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする試薬庫。
【請求項3】
前記基準駆動電圧時間プロファイルをデフォルトとして記憶し、前記生成手段によって求められた駆動電圧時間プロファイルに逐次更新する記憶手段を備え、
前記駆動制御手段は、前記記憶手段に記憶されている基準駆動電圧プロファイルあるいは駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする請求項1または2に記載の試薬庫。
【請求項4】
試薬残量を算出する試薬残量算出手段を備え、
前記生成手段は、初期化時および前記試薬残量が所定値になった場合に前記補正駆動電圧を求めることを特徴とする請求項1〜3のいずれか一つに記載の試薬庫。
【請求項5】
前記試薬残量算出手段は、試験項目と分注回数との積算によって前記試薬残量を算出することを特徴とする請求項4に記載の試薬庫。
【請求項6】
前記試薬残量算出手段は、前記測定手段によって測定された速度情報をもとに前記試薬残量を推定演算することを特徴とする請求項4に記載の試薬庫。
【請求項7】
検体と試薬とを反応させることによって前記検体の成分を光学的に分析する自動分析装置であって、
液体としての前記試薬を収容する試薬容器を試薬トレイに収納し、試薬吸引位置まで搬送する請求項1〜6のいずれか一つに記載の試薬庫を備えたことを特徴とする自動分析装置。
【請求項8】
試薬トレイ駆動部によって試薬トレイを回転させ、収容する試薬容器を分注プローブの試薬吸引位置まで搬送する試薬トレイ駆動方法であって、
基準駆動電圧を印加した時の基準駆動電圧時間プロファイルで前記試薬トレイを回転させたときの角速度あるいは角加速度を含む速度情報を測定する測定ステップと、
前記試薬トレイの回転移動距離が前記基準駆動電圧印加時と同じになる前記速度情報と駆動電圧との関係をもとに、前記測定ステップによって測定された速度情報に対応する補正駆動電圧を求める生成ステップと、
前記生成ステップによって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動する駆動制御ステップと、
を含むことを特徴とする試薬トレイ駆動方法。
【請求項9】
前記関係をもとに、前記基準駆動電圧時の速度情報と前記測定手段によって測定された速度情報との差を演算する演算ステップと、
前記演算ステップによって演算された差が所定の許容範囲であるか否かを判定する判定ステップと、
を備え、
前記生成ステップは、前記差が所定の許容範囲を超える場合に前記関係をもとに前記補正駆動電圧を求め、
前記駆動制御ステップは、前記生成ステップによって求められた補正駆動電圧を印加する駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする試薬トレイ駆動方法。
【請求項10】
前記基準駆動電圧時間プロファイルをデフォルトとして記憶し、前記生成ステップによって求められた駆動電圧時間プロファイルに逐次更新する記憶ステップを備え、
前記駆動制御ステップは、前記記憶ステップに記憶されている基準駆動電圧プロファイルあるいは駆動電圧時間プロファイルで前記試薬トレイを回転駆動することを特徴とする請求項8または9に記載の試薬トレイ駆動方法。
【請求項11】
試薬残量を算出する試薬残量算出ステップを備え、
前記生成ステップは、初期化時および前記試薬残量が所定値になった場合に前記補正駆動電圧を求めることを特徴とする請求項8〜10のいずれか一つに記載の試薬トレイ駆動方法。
【請求項12】
前記試薬残量算出ステップは、試験項目と分注回数との積算によって前記試薬残量を算出することを特徴とする請求項11に記載の試薬トレイ駆動方法。
【請求項13】
前記試薬残量算出ステップは、前記測定ステップによって測定された速度情報をもとに前記試薬残量を推定演算することを特徴とする請求項11に記載の試薬トレイ駆動方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−8373(P2010−8373A)
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願番号】特願2008−171184(P2008−171184)
【出願日】平成20年6月30日(2008.6.30)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願日】平成20年6月30日(2008.6.30)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]