
試験試料を処理する小型一体型システム
一体型器具は、使い捨て試験装置を使用して流体試験試料を処理する。試験装置は、担体内に担持されている。器具は、試験装置に試験される流体試料を一括して装填するように担体を受け取る真空ステーションを備えている。ユーザは、担体を真空ステーションから取り除き、別個の担体および試験装置処理サブシステムの装填ステーションに挿入する。このサブシステムは、担体を器具を通して移動させる運搬システムを備え、ここで様々なモジュールが、試験装置の密封、培養ステーション内への試験装置の装填、試験装置の培養、試験装置の読取、および試験装置の処分を含む操作を試験装置上で行う。

【発明の詳細な説明】
【技術分野】
【0001】
(発明の背景)
(発明の分野)
本発明は生物学、微生物学、化学、または他のタイプの試料を試験する試験装置、関連する器具、およびシステムに関する。
【0002】
(関連技術の説明)
生物学および他のタイプの試料は、反応させ、透過率および/または蛍光光学分析を含む様々な技術を使用して、化学または光学分析を行うことができる。分析の目的は、試料中の知られていない生物剤または目標物を特定する、試料中の物質の濃度を決定する、または生物剤が特定の抗生物質に敏感であるかどうかと、生物剤によって起こる感染を治療するのに効果的である抗生物質の濃度を決定することであってもよい。
【0003】
1970年代半ばに、出願人の譲受人および前任者と一緒に働いていた技術者および科学者が、複数の小さな試料ウェルを含む密封された試験試料カードを使用して生物試料の光学分析を行う技術を開発した。この技術と、関連する器具および装置は「Vitek(登録商標)システム」として当業界で知られるようになった。Vitek(登録商標)システムは、商業的成功であった(また、現在もそうであり続ける)。
【0004】
Vitekシステムで使用されるカードは特許文献により既知である。例えば、米国特許第4,118,280号、第3,963,355号、第4,018,65号、第4,116,775号、および第4,038,151号を参照のこと。より最近版のカードが、米国意匠第382,647号、および第414,272号、特許第5,609,828号、第5,746,980号、第5,766,553号、第5,843,380号、第5,869,005号、第5,916,812号、第5,932,177号、第5,951,952号、および第6,045,758号に記載されている。
【0005】
カードは、試料中に存在する可能性がある知られていない微生物の識別、および抗生物質の正確にキャリブレーションされた濃度に対する既知の生物の感度の両方のためにカードが開発された。カードの製造中、ウェルは様々なタイプのいずれかの様々な生物剤用培養培地、あるいは異なる抗生物質の濃縮物で満たされ、透明な密封テープで覆われる。
【0006】
カードは、流体試料がカードの中に入ることを可能にする機構として外部運搬管ポートを有する。カードはさらに、流体が運搬管ポートからカードのウェルに入ることを可能にする内部流体通路構造を含む。ストロー状運搬管の一端部が運搬管ポートに挿入される。もう一方の端部は、試験される流体試料を入れる開口レセプタクル(例えば、試験管)に挿入される。従来技術のCharles他の特許、米国特許第4,188,280号の教示によると、取り付けられた運搬管および試験管を備えるカードは、Vitek(登録商標)フィラーシーラとして知られる独立型真空および充填密封機内に配置される。充填および密封機は真空を作り出す。真空が解放されると、流体試料は試験管から運搬管内に、およびカードの内部経路を通してすべての試料ウェル内のすべてに引き込まれる。従来技術のCharles他の第‘280号の器具では、カードのウェルに試料を装填した後、カードは機械内のシーラモジュール内のスロットに手動で挿入され、ここで運搬管が切断および溶融されて、カードの内部を密封する。
【0007】
カードはその後、フィラー/シーラモジュールから手動で取り除かれ、Charles他の第‘280号に記載されたVitek(登録商標)リーダとして知られる、読取培養機内に装填される。読取培養機は所望の温度でカードを培養する。カードのウェルの透過性試験を行う光学リーダが設けられる。基本的に、カードは読取機内の列内に積み重ねられ、光学システムはカードの列を上下に移動させて、カードを一つずつ透過性光学部品内に引き込み、カードを読み取り、カードの列内にカードを戻す。
【0008】
(Charles他の第‘280号に記載された)初期のVitekシステムの配列は、二つの機械、フィラー/シーラおよび読取装置がカードを処理および解析する必要があるという点において、いくつかの制限がある。さらに、カードの完全な解析を行うため、追加の時間および労力が必要である。出願人の譲受人は後に、本明細書で言及され、「Vitek2」器具として当業界で知られている、完全に自動化された器具を開発し、商品化した。Vitek2器具は真空装填および密封動作の両方を自動化し、単一の器具内で培養および読取と組み合わせた。器具全体は、米国特許第5,762,873号および第6,086,824号を含むいくつかの特許に記載されており、その内容を本明細書に参照として援用する。
【0009】
要するに、「Vitek2」システムは、感度試験用の希釈を行い、真空ステーションでカードに試料を充填し、運搬管を切断することによってカードを密封する自動試料試験機を提供し、カードの培養と光透過率および蛍光分析をすべて自動で行う。この機械は、新規のピペットおよび希釈ステーションを提供して、流体を試験管に追加する、または一つの試験管から別の試験管に運ぶことが可能になる。機械は、単一の試験管に配置された試料の感度および識別試験を同時に行うことが可能である。機械は、試料の迅速かつ自動的な識別および感度試験を行う。
【0010】
器具は、試料トレイまたは「ボート」、および様々なステーションの中の矩形ベースパンの周りで四つの独立経路内で「ボート」を移動させる試験試料位置決めまたは輸送システムを使用する。ユーザはカードが装填されたカセット、および試料を入れた試験管を装填ステーションでボート内に配置する。位置決めシステムの設計は、カスタム構造のステーションを基本的にベースパンの上にすることを可能にするようになっている。追加の円形コンベヤおよび読取ステーション、または追加の希釈ステーションまたは真空ステーションなどの中間進行ステーション内の追加のタイプを含むように機械を拡張することは容易に達成することができる。
【0011】
Vitek2器具の試験試料位置決めシステムは、米国特許第5,736,102号、第5,762,874号、第5,798,182号、第5,798,084号、第5,853,667号および第5,897,835号に記載されている。光学読取ステーションは、米国特許第5,798,085号、第5,853,666号および第5,888,455号に記載されている。培養ステーションは、米国特許第5,925,884号および第6,156,565号に記載されている。真空装填ステーションは、米国特許第5,965,090号に記載されている。切断密封ステーションは、米国特許第5,891,396号に記載されている。上記特許の全ての全体な内容を、本明細書に参照として援用する。
【0012】
元のVitekシステムと同様に、Vetek2システムもまた商業的成功を収めた。Vetek2システムは、高容量および高スループット試験システムに対する特定の需要があるより大きな診療所または試験室で特に好評である。しかし、より小さい研究室および診療所は、最新の診断および試料試験器具の機能および特性を必要としているが、必ずしもVitek2システムによって提供される高容量および総合自動操作を必要とはしない。Vitek2と同様であるが、より小型で、費用がかからず、あまり複雑でなく、中小規模の試料試験企業により適した、最新技術の試料処理器具に対する要求が当業界にはある。本発明は、この要求を満たす器具および操作方法を提供する。
【0013】
このような背景の説明は、最近の公知の従来技術に関して本発明の内容を記載しているが、本発明の処分システムの様々な態様および特性は、現在当業界で知られている、または後に開発される可能性のある他のタイプの試料試験および処理システムに適用することができる。したがって、発明者は本発明の範囲を、あらゆる特定の試料試験装置形式、器具、または試験規則に限らない。さらに、本発明のシステムの特性は、他のタイプの試験、生物学試料試験以外の他の器具構造、および本明細書に記載された特定の器具に適用することができる。本発明の範囲に関する全ての質問は、添付の特許請求の範囲を参照することによって回答されるものとする。
【0014】
(発明の概要)
第1の態様では、複数の試験試料、および試験試料を受け取る試験試料装置を処理する、一体型システムが説明されている。試験試料は、個別の流体レセプタクル内に受け取られる。器具は、複数の個別の流体レセプタクル、および複数の試験試料装置を担持する担体を備えている。試験試料装置はそれぞれ、個別の流体レセプタクルの一つに格納された試験試料と流体連通して配置されている。器具はさらに、担体を真空ステーション内に手動で挿入し、担体を真空ステーションから手動で取り除くようになっているドアを有する真空ステーションを備えている。真空ステーションはさらに、真空源を備えている。真空源は、試験試料を個別の流体レセプタクルからそれぞれの試験試料装置内に装填するように制御される。
【0015】
器具はさらに、担体および試験装置処理サブシステムを形成する一式の処理モジュールを備えている。これらのモジュールは、真空ステーションから離れて配置されている、すなわちユーザは担体を真空ステーションから手動で取り除き、その後、試験試料の真空装填が完了した後に担体を担体および試験装置処理サブシステム内に手動で装填しなければならない。これらのモジュールは、試験試料装置の光学測定を行うモジュールを含む。担体および試験装置処理サブシステム、および真空ステーションは、単一の器具に一体化される。
【0016】
第2の態様では、複数の試験試料および試験試料装置を処理する一体型システムが提供される。システムは、複数の個別の流体レセプタクル、および複数の試験試料装置を間隔を置いた関係で担持する担体を使用し、各試験試料装置は試験試料装置と担体内に受け取られた流体レセプタクルの一つの間で流体連通を行う運搬管を有する。システムは、担体を真空ステーション内に手動で挿入し、担体を真空ステーションから取り除くようになっている真空ステーションを備えている。第1のドアが、ユーザに真空ステーションへのアクセスを与える。器具はさらに、真空ステーションから離れて担体および試験装置処理サブシステムを備えている。担体および試験装置処理サブシステムは、運搬管を切断および密封し、試験装置を培養し、試験装置を読み取ることによって、試験装置を密封するモジュールまたは装置を備えている。ユーザが担体を担体および試験装置処理サブシステムに手動で挿入できるアクセスを与えるように、第2のドアが設けられている。
【0017】
別の態様では、試験試料装置で開口レセプタクルに入れられた複数の試験試料を処理する方法が提供される。レセプタクルおよび試験試料装置は、担体によって担持される。各試験試料装置は、試験試料装置と担体に受け取られた流体レセプタクルの一つの間で流体連通を行う運搬管を有する。この方法は、チャンバを有する真空ステーション内に担体を手動で配置し、真空ステーションのチャンバを真空にし、それによって試験試料を一括して試験試料装置内に運ぶステップと、運搬が完了した後に、前記真空ステーションのチャンバから担体を手動で取り除くステップと、真空ステーションから離れた自動担体および試験装置処理サブシステム内に担体を手動で配置するステップと、担体および試験装置処理サブシステム内の運搬システムで、試験試料装置を自動的に密封し、試験試料を培養ステーションに装填するモジュールまで担体を自動的に移動させるステップとを含む。試験装置はその後培養され、読取ステーションによって周期的に読み取られる。真空ステーションと、担体および試験装置処理サブシステムは単一の試験試料処理器具内に一体化される。
【0018】
(好ましい実施形態の詳細な説明)
(システム概要)
次に試験試料を処理する小型の高スループット器具の現在好ましい実施形態の概要を、図1〜5と合わせて説明する。器具の構成および動作の詳細は、図6〜34と合わせて後に説明する。
【0019】
器具10は、例示した実施形態で多ウェル試験試料カードの形の1束の試験試料装置を処理する。代表的な試験試料カード100が図6に示され、その後に説明する。カード100は、図7〜15に示すカセット(担体)200内に最初装填される。担体200はさらに、流体試料を入れた一式の流体レセプタクル(試験管)106(図7)を担持する。各試験試料装置100は、図6および7に示す、運搬管102によって関連する流体レセプタクル106と流体連通するように配置されている。試料は、以下に説明する方法で、器具10内の真空装填ステーションによってカード内に装填される。
【0020】
図1〜5の器具は、試料試験システム全体の試料処理およびデータ収集部である。システム全体は、試験試料装置上のバーコードが走査される別個の独立型識別ステーションを備え、カードは担体200内に装填され、担体はバーコードが供給され、走査される。これらの機能は、本明細書に参照として援用された、Fanning他の米国特許第5,869,006号の特許に記載された別個の識別システムと同様である。システム全体はさらに、器具内の読取システムからデータを受け取るコンピュータ処理システムを有するワークステーションを備えている。システム全体のこれらの識別およびコンピュータ処理態様は、本明細書に特に関連するものではなく、関連する限りにおいてのみ、さらに論じる。
【0021】
例示した器具は、臨床的および工業的市場の両方で、低範囲から中間範囲の応用例で使用するため、上記Fanning他の特許に記載されたシステムなどのより複雑な試料試験器具のより小さく、より低コストの代替物として設計された。器具は、以下に詳細に説明するように、試験試料装置の半自動充填、密封、および装填を行う。しかし、従来技術のFanning他の第‘006号特許およびVetek2器具は自動希釈およびピペット機能を支持したが、これらの機能は手動または他の装置を使用することによってのいずれかでユーザによってオフラインで行われる。すなわち、ユーザは試料を作製し、それによって関連する試験管から試験試料装置内に直接装填することができる。これらのオフライン作業は、図34のワークフローチャートと合わせてより詳細に論じる。
【0022】
Vitek2の器具の場合と同様に、図1〜5の器具10は図6の試験試料カード100のウェル104内に流体試料の培養用真空ステーション300を提供する。しかし、本システムでは、真空装填は完全に自動的にではなく、本明細書に説明するように半自動的に行われる。特に、ユーザは装填担体を真空ステーション内に手動で配置する。流体試料がカード100のウェル104内に入ると、流体試料は、製造時に前もってカードのウェル内に装填された試薬を再水和する。
【0023】
真空装填後、担体200は次いで、担体および試験試料装置処理サブシステム50を含む器具10内の別個の区画内に手動で配置される。このサブシステム50は、流体運搬管102を切断することによって、カードを密封するように作動する密封ステーション400を備えている。器具10は、培養ステーション600内にカード100を一つずつ自動的に装填するカード自動装填装置サブシステムを備えている。培養ステーション600は、カードを保持する回転円形コンベヤを備えている。カードは、正確に制御された温度で保持されている。培養システムは、円形コンベヤから一つずつカードを排出し、カード読取サブシステム800にカードを運ぶ運搬アセンブリ700上にカードを配置するカード排出機構を備えている。カード読取サブシステム800は、カード100のウェル104の周期比色分析読取を行う透過率光学素子ステーションを備えている。ソフトウェアアルゴリズムが、個別の試薬ウェル104のパターンの変化を決め、これらのパターンを生物識別または抗菌結果に翻訳する。読取が完全であるとみなされると、カード100がカード運搬アセンブリ700によって、ユーザが器具から取り除くようにカードを保持するカード処分システム900に送られる。読取がさらに必要な場合、カードは培養ステーション600内に戻るように移動されて、さらなる培養および追加の読取が行われる。
【0024】
器具10の担体および試験試料装置処理サブシステム50の内部で装填された担体200を前後に移動させるように、担体運搬システム1000が器具内に設けられる。運搬アセンブリ1000を図29〜33と合わせて説明する。
【0025】
図1〜5および16〜33の器具は、同時に60個以上の試験試料カードを処理する能力を与えるように、拡大または縮小することができる。この議論は、6個の完全に装填された担体(60個の試験試料装置)を順次処理する実施形態に焦点を当てる。より大きな円形コンベヤ培養ステーション、または第2の培養ステーション、第2の光学素子ステーション、および関連するカード運搬アセンブリを提供することによって、能力を2倍にできることが分かる。
【0026】
器具10は、試料ウェル(試験試料カード)充填および培養/光学読取のすべての制御を行う。器具10はまた、試験予備処理用の2ステップユーザワークフロー、すなわち試薬水和、および試料接種(真空装填)を支持する。試験予備処理の後に、器具内で自動的に行われるステップ、すなわち器具内の戦略的に配置されたバーコード読取装置を使用したカセットおよび試験セットアップ検証、カード運搬管密封、培養ステーション内の試験試料カードの装填、カードの読取、および脱装填、および処理された担体および試験管のユーザへの返却が行われる。培養システム600内へのカード100の装填の際、器具は、培養温度、光学読取、および試験処理期間中のワークステーションコンピュータ処理システムへのデータ転送を制御する。器具はその後、カード処分システム900内に試験試料カードを運搬することによって、試験終了の際にカードを排出する。
【0027】
(ドアおよびユーザインターフェース特性(図1〜3B))
最初に図1〜3Bを参照すると、器具10は内部試料処理装置を覆う一式のパネル12を備えている。内部処理装置が、図16以下に、より詳細に説明されている。パネル12は、器具内の真空装填システム300の一部である真空チャンバ304へのアクセスを提供する、ヒンジ付真空ドア302を備えている。ユーザは、完全にまたは部分的に装填されたカセット200(図7に示すように、運搬管102を介して関連する試験管106にそれぞれ連結された、一式の最大10個の試験試料カード100)を図3Bに示す方法で真空チャンバ304内に配置し、真空ドア302を閉じる。チャンバ304内に真空が引かれ、真空の解放により試験試料カード100のウェル内に流体試料を装填する。図4に示すように、真空システム300はさらに、真空チャンバ304に真空を供給する真空ポンプアセンブリ306を備えている。
【0028】
器具はさらに、ヒンジ付装填/脱装填ドア14を備えている。ユーザは、図3Aによく示した、担体装填および脱装填ステーション16を露出するようにこのドアを開き、(装填された)担体を担体および試験試料装置処理サブシステム50内に導入する。(真空装填がちょうど完了した)装填された担体200が、担体装填ステーション16で機械の中に配置されて、器具の次の処理(密封、培養、読取、処分)が行われる。器具内の運搬システム1000は装填された担体200と係合し、以下に詳細に説明するように、器具内のステーションに担体をユニットとして運ぶように前進する。
【0029】
器具はさらに、カード処分システム900の一部である廃棄物アクセスドア902を備えている。ドア902は、ユーザが廃棄物区画904へのアクセスを得る手段である。バケツの形の取外し可能レセプタクル(906、図16)は、廃棄物区画904内に配置されている。試験試料カードは、読取過程が完了した後に、バケツ906内に落とされる。バケツがいっぱいになると、バケツは取り除かれ、カードが廃棄され、バケツが廃棄物区画904内に再び配置される。
【0030】
器具はさらに、前部ユーザアクセスドア18と、上部ユーザアクセスドア20と、この議論に関係ない上部サービスパネル側部および後部パネルとを備えている。これらのドアにより、器具の周期的な洗浄、および器具内の構成部品の定期点検のためのアクセスが提供される。器具10の内部へのアクセスは、ユーザの安全のため、およびカードの中断されない処理を保証するように、処理中に制限される。器具10は、センサを介してすべてのドアの状態をモニターする。前部ユーザアクセスドア18および装填/脱装填ドア14などの移動部品へのアクセスを提供するドアはまた、モニターされるドアロックを有する。
【0031】
真空ドア302および装填/脱装填ドア14は、円形の窪み付きドアである。ドアは、真空チャンバ304から装填ステーション16までカセット200を遮られないで運ぶように、反対方向に旋回する。これらのドアのヒンジ内の戻り止めにより、ユーザが閉じる準備ができるまで、ドアを90°より大きく開いておくことが可能になる。ヒンジは窪みが付いており、ドアが閉じている場合に視界から隠される。
【0032】
器具は、小型のユーザインターフェース22を備えている。ユーザインターフェースは、図1に示すように、器具10の上部左側でユーザインターフェース前部パネル上に配置された、キーボードおよびLCDスクリーンを備えている。器具は、その動作および状態に関するメッセージを伝達するのにスクリーンを使用する。作業が完了した場合、または異常が起こった場合に、ユーザに通知するように、音響表示器がまたLCDディスプレイと合わせて使用される。指示に反応し、器具への命令を送信し、他の機能を行うように、キーパッドが使用される。真空ドアおよび装填/脱装填ドアの隣に配置された表示灯が、ユーザに追加の状態情報を提供する。
【0033】
(試験試料装置100の特性(図6))
例示した実施形態は、多ウェル試験試料カードの形の試験試料装置を処理するように設計されている。当業者は、器具およびその構成部品を、他のタイプの試験試料装置を処理するように構成することができ、本発明は試験試料装置のあらゆる特定の形式または設計に限られるものではないことが分かるだろう。
【0034】
代表的な試験試料カードが図6に示されている。カード100は、はっきりした酸素透過透明密封テープで覆われた表面と裏面を有する、平面の薄い物体である。カードは、64個の試験試料ウェル104と、各ウェル104を流体流入口110および流体分配マニホールドに連結させる内部流体通路ネットワーク108とを含む。流体運搬管102は、示した方法で流体流入口108内に自動的に挿入され、O’Bear他の米国特許第6,309,890号の教示を使用して定位置に係止されている。カードの真空装填中、流体試料120は流体運搬管102からカード100に入り、内部流体通路ネットワーク108の経路に沿って移動する。流体試料はカードのウェル104を満たし、ここで流体は乾燥試薬または培養培地を再び水和する。培養の状態で、カードのウェル内の試薬と流体試料内の微生物の間で反応が起こる。この反応の結果、ウェルを通る光の透過率が変わる。器具10内の光学素子は、特定の光波長での透過率測定を得ることによって、カード100のウェルを周期的に読み取る。
【0035】
例示した実施形態で使用されるカードは、特許文献で十分説明されており、それによってより詳細な議論は省く。読み手は、さらなる詳細について以下の米国特許第5,609,828号、第5,746,980号、第5,670,375号、第5,932,177号、第5,916,812号、第5,951,952号、第6,309,890号、および第5,804,437号を参照のこと。これらの特許はそれぞれ、本明細書に参照として援用する。
【0036】
(担体200の特性(図7〜15))
次に図7〜15を参照すると、担体200またはカセットは、一式の試験試料カード100および関連する試験管106を保持する成形プラスチック構成部品である。例示した実施形態では、担体200は特別に合わせたスロット202内に最大10個の試験カードを保持する。カセット200の前部204は、各試験管106用の試験管スロット206を有する。スロットは、識別する目的で、カセットの前部にわたって1〜10と番号が付けられている。右側のハンドル208により、片手で運ぶことが可能になる。取外し可能なバーコードラベル210が、平面パネル部215内で担体200の反対側に付けられている(図7および14参照)。バーコード210は、器具10内のバーコード読取装置によって読み取られた場合に、カセットの識別を行う。各試験試料カードには、図7に示すように、バーコード120が付けられている。
【0037】
ユーザは、充填過程のために担体を真空チャンバ304(図3A)内に配置する前に、担体200を患者分離体(または、より一般的には流体試料)の管106、および試験カード100で装填する。図3Bに示すような担体200の非対称形状、および真空チャンバ304内の受入構造により、担体200が器具内に適切に装填される(すなわち、ハンドル208が器具の前部に向かっている)ことが保証される。真空装填過程が終了すると、ユーザは真空チャンバ304に対してドア302を開き、担体200を真空チャンバ304から取り除き、装填/脱装填ステーション16内に配置する。
【0038】
担体200は、運搬システム1000の主な構成部品である。運搬システム1000内の特別なブロック特性により、運搬システムが担体および試験試料装置処理サブシステム50内の処理ステーションを通して担体を移動させ、装填/脱装填ステーション16に戻すことが可能になる。運搬システム内の光学遮断センサは、担体200の底部に形成されたスロット212(図8、9および15)を検出する。光学遮断センサおよびスロットにより、器具マイクロコントローラがカセット位置を追跡することが可能になる。遮断スロット212は、担体200の底部に形成されたリブ214に形成されたU字型空隙である。各スロット212は、その直接上にカードの位置と位置合わせされて位置決めされている。したがって、遮断センサがスロット212の位置を検出すると、関連するカードの位置も検出する。この特性により、自動密封動作の正確な担体位置決め、および培養ステーション内の入口スロット内への担体200からのカードの自動的な装填が簡単になる。
【0039】
(真空ステーション300の特性(図1〜4、7、17))
図1〜4および7を参照すると、ユーザは図7に示すような試験試料カード100および試験管106が装填された担体200を図3Aの真空チャンバ304内に配置し、ドア302を閉じる。真空過程が、ユーザインターフェース22のキーパッドにより作動される。真空チャンバのドア302上のシリコンシール306は、前部パネル表面308に対して押し付け、真空チャンバ304を密封する。真空ポンプアセンブリ306内の真空ポンプ(図4、17)は、チャンバ304から空気を引き始める。空気は、カード経路およびウェルから運搬管を介して、試験管106内の懸濁液または流体試料を通して上に逃げる。各カード内の経路およびウェルはここでは真空である。
【0040】
真空ステーションは、Fanning他の米国特許第5,965,090号に教示された真空変位原則を使用して、カードを試験管106内の培養懸濁液で満たす。この内容は、本明細書に参照として援用する。真空の変化速度は、マイクロコントローラ制御により、空気圧サーボフィードバックシステムによってモニターおよび調節される。
【0041】
特に、短期間の後に、真空は真空チャンバから制御された速度で解放される。チャンバ内の空気圧が増加することにより、各試験管106から運搬管102を通してカード100の内部流体経路およびウェル104内に懸濁液が押される。この経過の過程が、真空チャンバ内の担体内のすべてのカードと同時に起こる。その結果、担体200内のすべてのカード100が真空装填される。担体200はここで、図3Aの装填ステーション16内への挿入、および器具10の残りの担体および試験装置処理サブシステム50によるその中の処理の準備ができている。
【0042】
(担体および試験試料装置処理サブシステム(図1、4、5、16〜33))
次に、担体200および試験装置100は真空ステーション300内で処理され、担体200はここで装填ステーション16内に配置されるように準備され、本明細書では担体および試験試料装置処理サブシステム50と総称して呼ばれる、残りの器具のサブシステムによって処理される。この群の構成部品は、運搬システム1000と、密封ステーション400と、カード自動装填装置サブアセンブリ500と、培養ステーション600と、カード運搬サブシステム700と、光学読取ステーション800と、処分システム900とを含む。これらの特性を、この項目において、さらに詳細に説明する。
【0043】
(担体装填および脱装填ステーション16(図1、3A、16))
装填/脱装填ステーション16は、オペレータが充填されたカードの担体を手動で装填して、密封、培養、および読取過程を開始するところである。装填/脱装填ドア14(図1)は、ユーザが担体を装填または脱装填する準備ができない限り、常に係止されたままである。ドア14は図では、装填/脱装填ステーション16をよりよく図示するように、図16の器具から取り除かれる。
【0044】
装填された担体200(図3B、7)は、開口した装填/脱装填ステーションドア14を通して器具10内に装填される。装填領域内の反射センサ1040(図17)は、装填/脱装填ステーション16内の担体200の存在を感知するのに使用される。装填/脱装填ステーション16の上の表示灯32は、装填/脱装填ステーションの状態をユーザに示す。ドア14が閉じると、処理サイクルが自動的に開始する。
【0045】
運搬システム1000(図29〜33)は、以下に説明する方法で器具内で各処理ステーションを通して引っ張る、または押すことによって担体200を移動させる。器具マイクロコントローラは、担体200が配置される軌跡、および(上記)担体の底部に成形されたスロット212、および運搬システム1000内に戦略的に配置された光学センサ1050A〜C(図29)を利用する運搬システムの状態を保持する。運搬システム1000は、装填/脱装填ステーション16から、担体バーコード(図7)および試験試料バーコードが読み取られるバーコードスキャナ、シーラステーション400、およびカードが円形コンベヤ培養ステーション600内に装填されるカード自動装填装置ステーション500まで担体を移動させて、装填/脱装填ステーション16に戻して、担体200並びに試験管および運搬管102の残りを取り除く。担体は装填/脱装填ステーション16に置かれ、ドア14は係脱され、オペレータは装填/脱装填表示灯32によって通知される。担体200はその後取り除くことができ、処理した試験管106および運搬管102の廃棄物の処分が可能になり、試験カードおよび関連する流体試料の次バッチの試験のために担体を準備する。
【0046】
(バーコード読取装置ステーション60(図4、5、20、17))
バーコード読取装置ステーション60(図4、5)は、普通は読取ステーション800の下で器具10内に位置決めされる。ステーション60は、ステーションを通過するときに、各担体200および担体200内の試験カード(図7参照)に関するバーコード情報を自動的に走査する。バーコード読取装置ステーション60は、バーコードスキャナ62(図20)およびカードセンサ1042からなる(図17)。カードセンサ1042は、できるだけカセット内のカードの近くで培養アセンブリ600のハウジング上に配置される。カードセンサ1042は、担体200内のカード100の存在およびスロットの位置を確認する。担体の底部のスロット212により、運搬システム1000が各カードをバーコードスキャナ62内に位置決めすることが可能である。
【0047】
図7に示すように、各カード100は、試験タイプ、ロット番号、使用期限、および特有の連番などの情報を含む工場で付けられたバーコード120を有する。カードのバーコード120がカードを担体200内に装填するときに、別個のワークステーションで走査されると、器具のバーコード読取装置62は、カード100がユーザによって指示されるように装填されたことを確認することによって、追加レベルの安全性を提供する。バーコードが別個のワークステーションで走査されない場合(「装填および実行」モード)、カード100が指示するように担体200内に装填されることを確認するのに、実験室の技術者のワークシートを使用することができる。
【0048】
十分走査された担体200および試験カード100は、シーラステーション400に続くことが可能である。欠落したまたは損傷したバーコード、期限切れのカード、および対応していないカードタイプなどの異常によりステーション60で読み取ることができない担体200およびカード100が、装填/脱装填ステーション16、およびユーザインターフェース22または表示灯32により通知されたユーザまで戻される。ユーザは、限られた時間内で問題を修正し、担体200を再装填する機会が与えられている。
【0049】
(シーラステーション400(図4、6、7、および17〜24))
図4、6、7、および17〜24を参照すると、試験カード100を培養および読み取ることができる前に、試験試料カードのウェル104を外部環境から密封しなければならない。シーラステーション400は、一つずつ担体200内に装填されるすべてのカードにこの機能を提供する。シーラステーション400は、収縮式加熱ニクロムワイヤ402を使用して運搬管102を溶融および密封し、それによってカードを密封する。次にこの動作をより詳細に説明する。
【0050】
担体200を器具内に装填した後、運搬システム1000内の運搬ブロックは担体200と係合し、担体センサ1040、カードセンサ1042、およびバーコードスキャナ62を通して運搬システムトラックに沿ってカセット200を引っ張る。担体が検査に合格した場合、装填/脱装填ドア14に向かって運搬システム1000の軌跡に沿って移動し戻され、ここでシーラステーション400は担体200内のすべてのカードを切断および密封するように動作する。
【0051】
特に、担体200がステーション400を通って移動すると、熱ワイヤ402は担体200内の運搬管102の同じ平面にエンクロージャまたはハウジング406内の開口部404を通して下向きにある角度で平行移動され、それによって各運搬管102に曝される。担体200が担体運搬システム1000によってゆっくり前進すると、各運搬管は熱ワイヤ402を通して押される。熱ワイヤ402により、プラスチックの運搬管102が溶融されて、試験管106内に入る大部分の運搬管を分離させる。運搬管の残りが、カード内の流体流入口110から外側に延びる短い密封されたスタブ(例えば、長さが1.5mm)を形成する(図6)。密封処理が終了すると、電力がワイヤ402に対して遮断され、ユーザ接触をなくすようにそのハウジング406内に引っ込め戻される。ワイヤ402の温度は、本明細書に参照として援用する、Karl他の米国特許第5,891,396号に記載されたように、マイクロコントローラ制御された一定の電流源によって制御される。
【0052】
運搬管102を切断するシーラの動作全体は、Karl他の第‘396号特許に記載された過程に類似している。カード100がシーラを通して移動すると、運搬管102が熱ワイヤ402を通して押されて、プラスチックを溶融し、カードを密封する。ワイヤ402およびその関連するアセンブリ408はその後、ハウジング406内に収縮する。担体200はその後、担体200から横方向に、培養システム600の入口開口部内にカードを移動させるカード自動装填装置ステーション500に移動される。
【0053】
シーラアセンブリ400は、a)その電子制御方法、b)その機械的位置合わせ、c)運搬管を切断および密封する前に、器具内で各カードが固定構造物に対して偏倚される予備装填特性、およびd)無許可のユーザアクセスを防ぐ特性のいくつかの点において特有である。
【0054】
特性a)に関して、マイクロコントローラは、カード/カセットサイクル要件毎に開口部404を通してワイヤ400を収縮および伸長しながら、熱ワイヤ402内の一定の電流を維持することによって確実な切断および密封を保証する。
【0055】
特性b)に関して、シーラハウジングまたはエンクロージャ406は、ワイヤアセンブリ408および関連する駆動機構410をある角度に方向付けて、水平および垂直位置を制御するようにモータ412を一つだけ使用してワイヤ402の位置合わせが可能になる。ワイヤ位置合わせは、器具内へのハウジング406の取り付けまたはハウジングへの駆動機構410の位置合わせを調節することによって、および/またはファームウェア内のモータ412の限界位置を設定することによって達成される。
【0056】
特性c)およびd)に関して、ワイヤ402、その関連するアセンブリ408、および駆動機構410は通常ハウジング406内に配置されている。シールド416は入口開口部406を覆う。カードが密封位置にある場合、モータ412は付勢され、モータはワイヤアセンブリ408を開口部406を通してある角度で下に移動させるように働く。この動作により、シールド416が収縮位置まで範囲外で移動する。ワイヤアセンブリ408内にあり、ワイヤ402の前に配置されたばね装填パッド414は、カード100の縁部に接触し、コイルばね415を使用して、器具内の固定構造物または止め具に対してカード100を予備装填または偏倚させる。固定構造物は、培養ステーション600のハウジング602の面に沿って長さ方向に延びるレール604の形をしている。他の構成ももちろん可能である。ワイヤ402はその後、カード100が固定シーラワイヤ402を通して移動されると、均一なスタブ長さを作り出すように運搬管を切断する。密封動作が完了した後、モータ412は、ワイヤアセンブリ408をハウジング406内に収縮させるように付勢される。そうすると、回転シールド416は重力によって、開口部404を覆う閉位置まで収縮する。開口部404をこのように覆うことによって、ユーザの収縮された熱ワイヤ402へのアクセスを防止する。
【0057】
担体200がシーラステーションに近づくと、運搬システム1000はその移動を低速にする。シーラステーション400内のモータ412は、開口部404を通してワイヤサブアセンブリ408を移動させ、ワイヤ402を露出するように付勢する。パッドまたは「シュー」414は、シーラワイヤ402の約2.0mm前に取り付けられている。シューは、図22に示す圧縮ばね415によってばね装填されている。シューまたはパッド414は、単一の段付きねじ420に取り付けられ、回転防止特性を組み込む。カード100が熱ワイヤ402に近づくと、シュー414はカードと初期接触して、ばね415を偏向させ、培養アセンブリパネル602上のレール604(図27)に対してカード100を予備装填する。これにより、運搬管のスタブ長さの一貫性が保証される。熱ワイヤ402を通る担体200の前進動作により運搬管102が切断されて、プラスチック運搬管102を溶融し、各カードを密封する。担体内のすべてのカード100が密封された後、運搬システム100はまた、その軌跡に沿って方向を反対にし、各カードはカード自動装填装置システム500と位置合わせして配置されて、培養のために円形コンベヤ培養ステーション600内に装填される。
【0058】
好ましい実施形態のシーラワイヤ402は、金属エンクロージャまたはハウジング406内で摺動ブロック機構422上に取り付けられた、加熱18ゲージクロメルAワイヤである。ハウジング406は、駆動機構410をある角度に位置決めし、長いシーラワイヤ/予備装填シュー414を正確な高さに配置し、シーラワイヤ402および駆動機構へのユーザのアクセスを防止する。駆動機構410は、水平および垂直位置合わせを簡単にするように、ある角度で取り付けられている。ステッピングモータ412は、水平および垂直位置を同時に調節するように、水平から30度の角度で熱ワイヤ取付ブロック426を延ばす。この角度はもちろん、異なる実施形態で変化することができ、例えば20から70度までの間で変化することができる。シーラワイヤ402の正確な位置合わせは、1.0から2.5mmまでの均一なスタブ長さを保証するように、モータ412の限界を制御するファームウェアによって調節可能である。切断および密封動作が終了すると、ステッピングモータ412は、駆動システム内のブロック426上のフラッグ424がホーム位置センサ428によって感知されるまで、熱ワイヤアセンブリ408を収縮させる。(図22参照)アセンブリは、切断ワイヤ402に電流を供給するワイヤ446を保護するように働くチェーン448を備えている。
【0059】
熱ワイヤアセンブリ408および取付ブロック426が収縮すると、回転シールド416は重力によって降下し、ハウジング開口部404を覆う。シールド416は突起部430およびフランジ452を有する。フランジ452は、装置が組み立てられるときにハウジング406の細長い開口454内に位置決めされる。フランジ452は、ブロック426が収縮ホーム位置に近づくと、取付ブロック426のショルダ426に接触する。突起部430およびフランジ452は、ユーザがシールド416を持ち上げ、熱ワイヤへのアクセスを得るのを防ぐ。シーラモータ412が付勢されると、ピン462が駆動機構410内でスロット460を通してスライドし、それによって熱ワイヤ取付ブロック422を延ばす。保護シールド406は、シールドを上向きに回転させて熱ワイヤ402を露出させるブロック422の面と予備装填シュー414の間の接触によって押されて開く。マイクロコントローラは、カードが通過したときに運搬管を切断する適切な温度を作り出すのに十分な一定の電流をワイヤ402に供給して、プラスチックを溶融し、管の小さなスタブを残して、カードの内部を大気から密封する。
【0060】
(カード自動装填装置ステーション500(図20、および25〜28))
次に図20および25〜28を参照すると、器具10はさらに、密封されたカード100を培養ステーション600内に装填するカード自動装填装置ステーション500を備えている。カードが密封された後、担体200は自動装填装置ステーション500に移動される。担体200の底部のスロット212(図8)により、図28によく示すように、運搬システム1000は各カードを培養装置600の入口スロット610のすぐ前に位置決めすることが可能になる。担体内のスロットは、器具の内部マイクロコントローラによって自動的に決まり、追跡される。
【0061】
自動装填装置ステーション500は、担体200の上に配置された、往復運動モータ駆動プッシャ機構502を備えている。機構502は、培養ステーション600内の円形コンベヤ(図示せず)内の担体200から横方向にカード100を押す。培養ステーション600の円形コンベヤは、30または60個のスロットを有する側部に向けられた(水平軸周りに回転する)円形のコンベヤである。スロットの一つが、カード入口スロット610と直接位置合わせされて、6時の位置に位置決めされる。プッシャ機構502はホームに戻り、運搬システム1000および円形コンベヤは次のカード位置に動かされる。担体200内の次のカードの装填は、同じ方法で進行する。すべてのカードの装填が終了すると、運搬システム1000は担体200および試験管106を装填/脱装填ステーション14に戻し、表示器32およびユーザインターフェース22を介してユーザに通知する。
【0062】
次に特に図25〜28を参照すると、自動装填装置は、カードプッシャ機構502に取り付けられたブロック506を駆動するモータ504を備えている。ブロック506は、担体200の経路にわたって横方向に延びるねじ付きシャフト510と係合する雌ねじを有する。モータ504がブロック506を駆動すると、ブロック506および取り付けられたプッシャ502はガイド508に沿ってスライドする。プッシャ502は担体内のカード100と接触し、培養ステーション600のスロット610内にカードを自動的に挿入する。シャフト510およびガイド508の先端512および514は、図27および28に示すように、培養ステーションのハウジング602に取り付けられた板612内の開口部に受け取られる。1対のガイド612は、カード100をスロット610に案内する。
【0063】
(培養ステーション(図16〜20、35〜38))
器具10内の培養ステーション600を次に、図16〜20、35〜38と合わせて説明する。培養ステーションは円形のコンベヤ604(図35)を備えている。コンベヤは培養エンクロージャを形成する一組の取外し可能なアクセスカバー630によって覆われている。コンベヤは、図18に示すモータ632によって回転される。培養ステーション600およびその関連する円形コンベヤの構造および動作は基本的に、特許文献に記載されたものと同じである。本明細書に参照として援用する、米国特許第6,024,921号、第6,136,270号、および第6,155,565号を参照のこと。また、米国特許第5,762,873号を参照のこと。したがって、培養ステーション600の構成の詳細な説明は簡潔にするために省略する。
【0064】
試験試料カードが密封され、カードが入口スロット610を介して円形コンベヤ内に装填されると、試験期間中(最大18時間)、または所定の時間割当が満たされるまで、円形コンベヤ604内に留まっている。時間割当は、カードの各試薬またはタイプにより変化する。円形コンベヤは、アクセスパネル630によって囲まれた、温度制御チャンバ(培養装置)内に含まれる。
【0065】
好ましい実施形態の円形コンベヤ604自体は、米国特許第6,136,270号に教示された、共に最大60個の試験カードを培養装置内に保持することが可能な四つの象限(quadrant)(象限(quadrocell)または象限(quad)と呼ばれる)からなっている。代わりの構成も可能である。円形コンベヤの位置決めは、円形コンベヤの上部および底部に配置された光学センサによって達成され、円形コンベヤの外縁部上のスロットの位置決めとも理解できる。各円形コンベヤの象限(quadrant)は、洗浄のために独立して取り除くことができる。しかし、四つの円形コンベヤの象限(quad)はすべて、カードを処理するために、定位置に配置しなければならない。
【0066】
培養装置システムは、円形コンベヤ内のカードの温度を調節する。温度は、35.5±1℃の平均円形コンベヤ温度で維持されるマイクロコントローラによってモニターされた精密サーミスタの使用によりモニターおよび制御される。別個のユーザ設置プローブ温度計へのアクセスが、以下で説明するように培養装置カバーの前部に提供されている。これによりユーザは、別個のキャリブレーションされた温度計を使用して、培養装置の温度の精度を検証することが可能である。回転円形コンベヤシステムは、試験が終了するまで、1時間に4回、読取装置ステーション800にカードを移動させるカード運搬システム700に試験カードを運ぶ。読取装置ヘッド光学素子は各カードを走査し、培養装置に戻す。円形コンベヤは、円形コンベヤ内の12時の位置からカードを排出し、光学素子ステーション800への運搬用の試験カード運搬システム700(図16)内に配置して培養ステーション600に戻す、図18によく示すカード排出機構640を備えている。これは、例えば、米国特許第5,762,873号に記載されているものと同じである。
【0067】
図35は、円形コンベヤ604をよりよく図示するため、培養ステーションを取り除いたいくつかのカバーパネルを備える、図1の円形コンベヤ604および培養ステーション600の正面斜視図である。カバーパネルは、円形コンベヤ604用エンクロージャを形成し、円形コンベヤ604を大気状態から隔離する。
【0068】
円形コンベヤ604は垂直に取り付けられ、水平軸周りに回転する。空気が(円形コンベヤ604を入れた)培養ステーションの前部から隔壁652の後でステーションの後部まで循環することができるように、空気ダクト622が、ステーション600の上部に設けられる。ステーション内の大気の量を制御することができるように、隔壁652と平行かつその後に位置決めされた後部カバーパネル内に、小さな孔が配置されている。ダクト622は、空気を隔壁と後部カバーパネルの間で隔壁の後側に流すことができる、隔壁652内に開口部を備え、ここで空気は空気を加熱する加熱装置の上を通り過ぎ、図36に示す方法で、円形コンベヤ604の後に位置決めされた空気分配テーブル624内に第2のファンで吹き込まれる。
【0069】
円形コンベヤ604は、試験試料カードを受け取る複数のスロット614を有する。円形コンベヤは、円形コンベヤ装填ステーションで円形コンベヤの最低部、および空気テーブル624および隔壁652と対向する反対側の後側部で、カードがそれを通してスロット614内に案内される実質的に開口した前側部623を有する。
【0070】
図36は、培養ステーションの空気テーブル624および空気分配カバープレート625の特徴をよりよく図示するため、円形コンベヤ604を取り除いた、図35の培養ステーションの斜視図である。空気テーブル624は、隔壁652の後の加熱装置およびファンアセンブリから暖かい空気を受け取る。空気テーブル624は、円形コンベヤ604のスロット614と位置合わせして位置決めされた空気テーブル624を囲む空気分配カバープレート625を有する。カバープレート625は、暖められた空気を円形コンベヤの後側部、および円形コンベヤのスロット内のカードの上に導く、中に形成された複数の細長い開口部626を有する。カード上の適切な空気流を進めるため、空気分配カバープレート625に隣接し、これと反対側の円形コンベヤの後側部は実質的に開口しており、支障がなく、それによって試験試料カード上の空気流を実質的に遮断しないことが可能である。
【0071】
温度計プローブが空気テーブル624の内部にアクセスすることを可能にするように、切り欠き670が空気テーブルの側部に隣接して形成され、それによってユーザは、試験試料カードの上に空気が流れる前に、空気テーブル内の空気の即時温度読取を得ることが可能になる。図37に示すように、インサートリテーナまたはレセプタクル672が、切り欠き670と位置合わせして培養ステーションハウジングのカバーパネル602に取り付けられ、それによって温度計を定位置に保持する手段が提供される。レセプタクル672は、図38に示すように、温度計676を把持する突起674を備えている。温度計676の面は、温度を表示するディスプレイを備えている。温度計676のプローブが、図38に点線で示されている。
【0072】
本明細書に記載された温度モニタリングシステムは、このタイプの器具への適用において特有であると考えられる。本設計により、直接読出温度計676の一体化が簡単になる。温度計は、温度計の先端を空気テーブル624内の適切な角度および位置に位置決めするように、リテーナ672を使用して培養装置の空気テーブル温度を測定することが可能である。外部温度計676は、進行中の試験を妨げることなく、内部温度の直接かつ正確な読取を行う。
【0073】
本発明の温度モニタリングシステムは多くの特有な特徴を有しており、その中で最も重要なことは外部温度計の位置である。温度計プローブは、空気がカードに当たる直前に、暖かい空気を観察するように位置決めされている。空気はカードと交差する時に僅かに冷却され、モニターする温度はカードに当たり始めた空気温度であるので、この位置は重要である。培養装置の内部温度を正確に反映したアクセス可能な位置を見つけるため、広範囲の試験が行われた。温度計の位置決めは重要であり、システムのいくつかの特有な特性によって助けられる。第1に、温度計プローブの先端が嵌合する培養装置シャーシ内に成形された切り欠き670がある(図36参照)。この切り欠きにより、温度計は、そうでなければ到達できない空気テーブルの後に流れる空気を測定することが可能になる。温度計位置決めの第2の独特な特徴は、図38に示すように、温度計リテーナまたはレセプタクル672である。このマウントは、切り欠き内にプローブを位置決めするのに必要な角度で温度計676を保持する(図38参照)。傾斜した入口により、プローブは、円形コンベヤの動作に干渉することなく、円形コンベヤの上を通過することが可能になる。また、培養装置の隔壁652の前から適当な距離に温度計が保持され、したがってプローブの先端は隔壁に当たらない。マウントはまた、温度計を定位置に保持するクリップ674を有する。温度計は、レセプタクル672内にスナップ嵌めされ、視覚的読取に影響を与える三つの軸の何れかに沿って摺動することができない。しかし、温度計は定位置で回転することができる。というのは、これは温度読取の精度に影響を与えないからである。
【0074】
ユーザにとって便利な点は、システムが標準的な追跡可能な8分の1の直径のプローブ温度計を使用するように設計されていることである。温度計が故障またはキャリブレーションを失った場合、簡単に交換することができる。スナップ嵌めされたレセプタクルにより、温度計は洗浄およびキャリブレーションのために簡単に取り除くことも可能になる。このような外部モニタリングシステムは産業ユーザを念頭に置いて設計されたが、臨床ユーザも器具ファームウェアによって報告された温度を手動で確認する容易性を評価している。別の利点は、温度計によって報告される温度が即時的であるということである。ファームウェアは、培養装置の温度を連続した3分間の平均として報告するだけである。即時の温度が必要である場合、ユーザはこれを手動で簡単に測定することができる。適切な温度計676として、Fisher Scientific Traceable Jumbo Display Digital Thermometer(部品番号14−648−47)、およびVWR Scientific Products Jumbo Display Digital Thermometer(部品番号77776−720)が挙げられる。
【0075】
(カード運搬システム700(図16、17、および20))
図16、17および20によく示すように、器具はカード100内のウェル104を読み取るために、光学読取ステーション800を通して培養ステーション600からカードを運ぶカード運搬システム700を備えている。カード運搬システム700は基本的に、本明細書に参照として援用される、従来技術の米国特許第5,798,085号、第5,853,666号、および第5,888,455号に記載されたものと同じである。したがって、簡潔にするためより詳細な説明は省略する。基本的に、カードはベルト704と棚702の間に垂直な姿勢で保持され、ベルト704を前後に駆動するモータによって右から左に、および左から右に移動される。棚は、ベルトが棚を前後に駆動すると、カードを垂直位置に保持するスロット機構を備えている。カードが透過性光学素子ヘッドを通して移動されると、カードは、ウェルの幅にわたって多数の位置でカード内の各ウェルに対する透過率測定を得るため、以下に説明する正確な方法で移動される。カードは、光学システム内にウェルを正確に位置決めするように、内蔵位置合わせセンサ止め具孔130(図6)を備えている。
【0076】
(読取ステーション800(図4、5、16および17))
カードがカード運搬システム700内に配置されると、読取ステーション800を通して移動される。読取ステーションは、カードの内のウェルの列と同じ方向に垂直に向けられた二つの透過性光学素子モジュール802(図16および17参照)を備えている。各モジュール802は、1列のウェルから測定を得る。併せて、モジュール802は、カードのウェルの透過性測定を2列のウェルについて同時に得る。光学読取装置ステーション800の動作の構成および方法は基本的に、従来技術の米国特許第5,798,085号、第5,853,666号、および第5,888,455号に記載されたものと同じであり、したがって、簡潔にするために一般的な概要および議論のみを本明細書に記載する。これらの特許と異なり、例示した実施形態は透過性測定のみを提供するが、三つのモジュールを提供するようにモジュール802の一つを蛍光モジュール(米国特許第5,925,884号参照)と交換する、または蛍光モジュールを追加することによって、もちろん蛍光測定をこれらの特許で記載されたように行うことができる。追加のモジュールをもちろん、提供することができる。
【0077】
カード100は、透過性光学素子システムモジュール802によって位置決めおよび読取され、そこから排出される円形コンベヤスロットに戻される。器具内ではデータ分析は行われず、光学データが収集され、遠隔ワークステーションに伝達されて分析される。器具とワークステーションの間の通信が起こっていない場合に、生のデータを待ち行列に入れ、後にワークステーションに伝達することができる。
【0078】
読取装置ステーション800は、15分毎に1回、各カード100を走査する、すなわち1時間毎に4回の走査を行う。カードが読み取られる度に、次の読取サイクルまで、培養される円形コンベヤに戻る。最後の読取サイクルが終了した後、カードは光学素子を通してカード処分システム900まで運搬されて、カードを廃棄物収集容器内に排出する。
【0079】
読取装置システム800およびカード運搬システム700は共に、試験カードのウェル内で生物の成長を周期的にモニターするため、カード位置決めおよび光学データ収集を行う。各ウェル対時間の光透過率を測定することによって生物の成長を定量化するのに、光透過率データが使用される。例示した実施形態は現時点で、二つのタイプの光学素子モジュール802を支持している。第1のモジュール802は、各ウェルに対して660nmのLED照明源を有する。他のモジュール802は、各ウェルに対して428nmおよび568nmのLEDを有する。追加の波長を有する第3のモジュールの開発ももちろん可能である。
【0080】
各光学素子モジュール802は8個の測定LEDを有し、それによって1列毎に8個の試料ウェルを読み取ることができる。各カードは、1カード毎に合計64個のウェルに対して8(または16)列のウェルを有する。各モジュール802は、各ウェルに対して透過性LED光源だけでなく、ウェルを通過した後にLED光を捕捉する各ウェル用の検出器を備えている。検出器は、シリコン光ダイオードを使用する。8列の8個の試料ウェルを備えたカードがモジュール802の光経路(LEDから光ダイオードまで)を通して移動すると、サンプリングが起こる。カードが運搬システム700によって16の空間的に分離されたステップで移動されて、1ステップ毎に3回の読取を行うので、読取システムは各ウェルにわたって走査する。このデータはその後、ウェル内に形成されたあらゆる気泡の効果を少なくするように処理される。読取は円滑化され、ピーク値が選択される。
【0081】
モジュール802内のエミッタおよび検出器ハウジングは、修理および光学素子領域の洗浄のためのアクセスを容易にするためヒンジ付けされている。この検出システムは、30%から100%の透過率で空気を通して内部で自動キャリブレーションすることが可能である(無光から全光まで)。光学素子は、各カードを読み取る前に、空気を通して100%の透過率に自動的にキャリブレーションされる。
【0082】
(処分システム900(図16、17、20))
試験試料カード100の培養および光学試験が完了すると、カードは培養ステーション600内の円形コンベヤから自動的に取り除かれ、読取装置ステーション800を通過し、処分システム900に運ばれる。処分システムは、廃棄物容器906を保持する処分エンクロージャ904と、カードをカード運搬システム700の縁部から廃棄物容器906のすぐ上に位置決めされたシュート910内に導くランプ908とを備えている。廃棄物容器は、器具10から取外し可能であり、図1に示すドア902を介してアクセスされる。カードは、単に運搬システム700内のベルトを左側に操作して、左手側の棚702の縁部を通してカードを担持することによって、ランプ908に運ばれる。
【0083】
廃棄物収集ステーション900は、器具10の前で真空ステーション300の下に配置されている。このステーションは、容器が設置された場合に検出するように、取外し可能な廃棄物容器906(図16参照)およびセンサ(図示せず)を格納する。ユーザは、廃棄物容器906がユーザインターフェース22によりいっぱいになるまたは詰まった場合に通知される。器具内のソフトウェアは、空になった後に、容器に追加されるカードの数を追跡する。
【0084】
(担体運搬システム1000(図29〜33))
器具10は、担体および試験装置処理サブシステム50を通して装填および脱装填ステーション16から担体200を運ぶシステム1000を備えている。運搬システム1000は図では、システムの構成部品をよりよく図示するように、図29〜33では隔離されている。器具10内の様々なモジュールとの相互関係は、残りの図、例えば図17、19、および20の検討、および以下の議論により分かるであろう。
【0085】
基本的に、運搬システム100は担体200と、担体200を前後に移動させる運搬サブアセンブリ1002とを備えている。運搬サブアセンブリ1002は、以下に説明する方法で担体と係合するようになっているブロックの形のカセット係合部材1004を備えている。運搬サブアセンブリ1002は、ブロック1004および担体200を、担体装填および脱装填ステーション16、密封ステーション400、および培養装填ステーション500の間の単一の長手方向軸に沿って前後に移動させるように構成および配置されている。
【0086】
運搬サブアセンブリ1002は、ねじ付きシャフト1010を回転させる線形アクチュエータモータ1006を備えている。ねじ付きシャフト1010は、ブロック1004に取り付けられたねじ付きナット1005(図32)内に受け取られる。円筒形ガイド部材1008は、モータ/ガイドロッドマウント1018および前部ベアリングマウント1020の間に延びている。前部ベアリングマウント1020は、図29に示すように、運搬サブアセンブリ1002の基部1016に締め付けられている。1対のリフトピン1012は、ブロック1004内の開口部1024を通して駆動ナット係合スライド1022から上向きに延びる。リフトピンは、ばね1026によって下側位置まで偏倚され、それによってブロック1004が装填/脱装填ステーション14に位置決めされると、リフトピン1012の下縁部は基部1016に形成されたランプまたはカム表面1014と接触する。ブロック1004がモータ1006によって器具の後部に向かって移動されると、リフトピンはランプ1014の上に上がり、それによって開口部1024を通して延びる。この上部位置では、リフトピンはその後、担体200の下側の機構と接触することができ、それによってモータ1006がブロック1004を器具の後部に向かってバーコード読取ステーション60に移動させると、トラック1030に沿って担体を引っ張る。
【0087】
実際、図17に示す培養ステーションハウジングの側部に位置決めされた反射センサ1040は、装填および脱装填ステーション16内の担体の存在を検出する。線形アクチュエータモータ1006がシャフト1010を回転させると、ブロック1004は器具10の前部から移動され、二つのリフトピン1012が持ち上げられて試験試料担体200と係合する。ピン1012は、運搬サブアセンブリ1002の基部1016内に成形されたカム表面1014によって持ち上げられる。ピン1012は、ボールベアリングホイール(図示せず)を保持する駆動ナット係合スライド1022に取り付けられている。ボールベアリングは、モータ1006が器具の後部にブロック1004を移動させるように動かされた場合、カム表面1014の上に上がって、ピン1012を持ち上げる。担体200はその後、試験試料カードの数を数え、担体内の位置を決める、第2の反射センサ1042(また、図17に示す)を通して器具内に引き込まれる。担体200およびその試験試料カードはその後、試験試料カード100および担体200の上のバーコードを読み取るバーコード読取装置ステーション60に提示される。
【0088】
バーコードを読み取った後、モータは反転し、担体を装填および脱装填ステーション14に向かって器具の前部に向かって移動させる。前進移動中、密封ステーション400内の熱ワイヤが展開され、試験試料カードが密封される。モータ1006は再び反転し、担体200はカード自動装填装置ステーション500まで移動し、試験試料カードを担体200から培養ステーション600内に押し込むことができる場所に配置されている。
【0089】
三つの光学遮断センサ1050A、1050B、および1050C(図29および30)は、全体の移動にわたって担体200の位置を追跡する。三つのセンサ1050は、運搬サブアセンブリ基部1016内にスナップ嵌めされた単一のプリント基板1052に取り付けられる。担体200は、取外し可能および交換可能な磨耗ストリップ1054の上をスライドする。磨耗ストリップ1054は、担体200と基部1016の間の摩擦を最小限に抑える。
【0090】
上に記すように、線形アクチュエータステッピングモータ1006はブロック1004を移動する。ブロック1004はリフトピン1012を制限する。モータのシャフト1010は、サブアセンブリ1002の全長近く延びる。シャフト1010の端部は、図29によく示したピローブロックベアリング1020を回転させる。モータ縁部は、アルミニウムブラケット1018内に取り付けられる。モータ1006は、四つの振動制御グロメットおよび段付きねじを介して間接的にブラケット1018に取り付けられている。
【0091】
回転モータ1006は、シャフト1010の長さに沿ってアクメねじ付きナット1005(図32)を駆動する。ナット1005は、二つの振動制御グロメット1058および段付きねじ1060を介して駆動ブロック1004に間接的に結合された、アルミニウムブロック1056内に押し込まれる。段付きねじ1060により、ナット1005は自動位置合わせすることが可能になり、ナット1005とシャフト1010の結合が防止される。グロメット1058は、ナット1005によって発生する雑音が駆動ブロック1004を通して基部1016内に伝達するのを防ぐ。
【0092】
駆動ブロック1004は、ナット1005によって水平方向に移動される。器具の前部に向かって移動する場合、ブロック1004上のベアリング表面1060が、担体200の裏面220(図14)を押す。器具の後部に向かって移動する場合、二つのリフトピン112は駆動ブロック内の孔1024を通して持ち上がって、試料担体の裏側のリブ222と係合する(図15参照)。
【0093】
駆動ブロック1004が前部にある場合、ブロックは器具に挿入される新しい試料担体200用の止め具として働く。駆動ブロック1004が器具の後部にある場合、反射センサ1064(図29)はこれを検出し、器具マイクロコントローラにブロック1004がホーム位置にあることを表示する。
【0094】
三つの光学遮断センサ1050A、1050B、および1050Cは、プリント基板1050に取り付けられている。プリント基板1052の使用により、基部1016にセンサを直接取り付ける場合に必要なワイヤねじを排除する。センサ1050A、1050B、および1050Cは、上に説明するように、担体200の裏側の切り欠き212を検出する。各切り欠きは、試験試料カードの位置に対応する。センサは、カードカウンタ反射センサ位置(センサ1050A)、バーコード読取位置(センサ1050B)、および培養装填位置(センサ1050C)で、プリント基板上に配置されている。センサ1050A〜Cにより、担体の位置を連続的にモニターすることが可能になる。
【0095】
リフトピンサブアセンブリは、ホイールとして働く、ピンの基部に二つのボールベアリングローラ(図示せず)を含むアルミニウムブロック1022内に取り付けられた二つの垂直ピン1012からなる。ホイールがその上を転動する水平表面1066は、カムまたはランプ表面1014を提供するように、器具の前部の近くでステップ付けされる。ステップは、ホイールが上下に転動することが可能になるような角度をしており、ピン1012を上げ下げする。駆動ブロック1004とリフトピンサブアセンブリの本体の間のピン上の圧縮ばね1070により、カム1014を落下させる場合に、リフトピンアセンブリが落ちることを確実にする。
【0096】
レール1072は、前後への担体の移動を制限するように設けられている。磨耗ストリップ1054は、担体200が上を摺動する低摩擦および磨耗表面を提供するように、図29に示されたように、基部1016の左右水平表面上に取り付けられている。
【0097】
器具の培養ステーション600の前部カバー602は、運搬システムに三つの機能を提供する。第1に、水平リブ1080(図17)は、培養ステーション600内に挿入する前に、試験試料カードが担体200の右側から摺動するのを防ぐ。第2に、前部の近くに取り付けられた反射センサ1040(また、図17)は、担体200が装填ステーション内に存在するときを判断する。第3に、センサ1040のちょうど後に取り付けられたセンサ1042は試験試料カード100を計数し、担体200上の位置を決める。
【0098】
図3Aおよび16によく示すように、器具の前部パネルは、担体200に装填するように装填および脱装填ステーション16内のテーパ状通路を有する。担体200は、駆動ブロック1014に接触するまで挿入される。ドア14は閉じられ、センサ1040はキャリヤの存在を登録する。ドア14と駆動ブロック1004の間の空間は、担体200が装填および脱装填ステーション内に存在する場合に、反射センサ1040が常に担体200を検出する。
【0099】
(制御電子部品およびファームウェア)
器具10は、器具の様々なモジュールおよびサブシステムの動作を制御する制御電子部品およびファームウェアを備えている。制御電子部品は従来のものである。このような電子部品およびファームウェアは、当業界の現在の状況を考えて、本開示から当業者によって通常の努力で開発することができる。
【0100】
(ワークフロー(図34))
器具10のワークフローおよび処理ステップを次に、他の図と共に図34と合わせて説明する。ステップ1100では、ユーザは試料接種材料をオフラインで準備し、流体試料を試験管に装填し、カード100上のバーコードを走査し、カード100および試験管を担体(カセット)200内に装填する。バーコードは、別個のバーコードスキャナでオフラインで走査することができる。走査ステップは、試験される試料、使用されるカード上のバーコードの走査、および担体バーコードの走査に関する情報を受け取るようにプログラミングされたワークステーションまたはコンピュータを有する別個の識別ステーションで行うことができる。
【0101】
ステップ1102では、ユーザは真空チャンバドア302を開き、装填された担体(図7に示す)を真空チャンバ304内に装填する。図3A参照のこと。ユーザはその後、ドア302を閉じ、それによってチャンバを密封する。
【0102】
ステップ1104では、ユーザはユーザインターフェース22のキーパッドを介してカードを充填する真空サイクルを開始する。
【0103】
ステップ1106では、真空ポンプは付勢され、真空が真空チャンバ304の内側に生成される。真空変位により、上記の方法で担体内のカードが充填される。
【0104】
ステップ1108では、試薬充填が成功したかどうか確認するように試験が行われる。試薬充填を保証するために真空勾配および時間をモニターする。
【0105】
ステップ1110では、試薬充填が成功しなかった場合、担体処理はステップ1112で示すように中断され、ユーザは真空ステーション300から担体200を取り除く。
【0106】
ステップ1114では、試薬充填が成功した場合、ユーザは真空チャンバ304から担体を脱装填する。
【0107】
ステップ1116では、ユーザはドア14を開き、担体を装填および脱装填ステーション16内に手動で配置する。担体の検出は、センサ1040によって行われる(図17)。
【0108】
ステップ1118では、運搬システム1000は、担体200をバーコード読取装置ステーション60に移動させる。途中で、担体に装填されたカード1000がカードセンサ1042によって検出される(図17)。
【0109】
ステップ1120では、担体内およびカード上のバーコードが、読取装置ステーション60内のバーコードスキャナによって読み取られる。担体およびカード用バーコードは、オフラインで走査されたバーコードと比較される(このような走査が行われた場合)。
【0110】
ステップ1122では、器具はバーコード読取が成功したかどうかを判断する。成功でない場合、過程はステップ1124に進み、ここで運搬システム1000は担体を装填/脱装填ステーション16に戻すように移動させ、ドア14が係脱される。ステップ1126では、ユーザは可能であればエラーを修正する。
【0111】
バーコード読取が成功した場合、過程はステップ1128に進む。このステップでは、運搬システムは担体をシーラステーション400に移動させる。
【0112】
ステップ1130では、シーラステーション400は、上記の方法で担体内に各試験試料カードを密封するように働く。運搬管残留物は、試験管内に落ちる。残りのスタブは試験試料カードを密封する。
【0113】
ステップ1132では、すべてのカードの密封が成功したかどうか判断するように検査を行う。これは、熱シーラワイヤ電流をモニタリングし、シーラモータステップをモニタリングし、運搬モータステップおよびエラーがない場合に動作しているシーラをモニターすることによって行われる。
【0114】
密封ステップが成功しなかった場合、過程はステップ1142に進み、試験が中断し、処理はステップ1138に進む。
【0115】
密封ステップが成功した場合、ステップ1134で示されるように、運搬システム1000は担体200をカード自動装填装置システム500に移動させる。カード自動装填装置は、前に説明されている。
【0116】
ステップ1136では、カード自動装填装置ステーション500は、培養ステーション600内の円形コンベヤ内に一つずつカードを装填するように働く。培養装置円形コンベヤは、次のカードに対応するように、あらゆる利用可能な位置に回転する、または動かすことができる。
【0117】
ステップ1138では、ステップ1136が終了した後、運搬システム1000は試験管および運搬管残留物を備える担体を装填および脱装填ステーション16に移動させる。
【0118】
ステップ1140では、ユーザは担体200を取り除き、試験管および内容物を処分する。担体は次に再利用の準備ができている。
【0119】
ステップ1144では、次にカード100は培養ステーション600内に格納され、ここで一定の温度で培養される。
【0120】
ステップ1146では、カードは円形コンベヤ内のスロットから周期的に押し出され、カード運搬システム700内に配置され、ここで読取システム800に対して前後に往復運動される。カード内のすべてのウェルの読取は、15分毎に起こるように設計されている。
【0121】
ステップ1148では、光学素子モジュール802によって得られる透過率測定値は、器具10内の通信ポートまたはインターフェースを介して別個のワークステーションに伝達される。
【0122】
ステップ1150では、カードの読取が完了したかどうかを判断する検査が行われる。これは、カードの周期的な読取によって示される試料識別、あるいは決定できた試料感度のように一つまたは複数のウェル内で反応が起こっているかどうかによって見出される。試験が完了しない場合(すなわち、もっと読取が起こる必要がある場合)、処理は経路1152に進み、カードは円形コンベヤ内のスロットに送り戻されて、さらなる培養および追加の読取を行い、ステップ1144、1146、1148、および1150が繰り返される。
【0123】
ステップ1150で、読取が完了した場合、処分ステーションエンクロージャ904内の廃棄物容器がいっぱいであるかどうかを確認する試験が行われる。そうである場合、ユーザはステップ1158で通知される。そうでない場合、カード運搬システム700はカードを棚702の端部を通して左側にずっと移動し、カードは処分システムシュート910内に落ち、エンクロージャ904内の廃棄物容器内に落ちる。
【0124】
ステップ1162では、ユーザは廃棄物容器を定期的に空にする。
【0125】
上述の説明から、開口レセプタクル106に入れられた複数の試験試料を試験試料装置100で処理する方法であって、レセプタクルおよび試験試料装置は担体200によって担持され、各試験試料装置100は、図7に示すように、試験試料装置100と担体200内に受け取られた流体レセプタクル106の一つの間を流体連通させる運搬管102を有する方法を説明したことが分かるだろう。この方法は、担体200をチャンバ304を有する真空ステーション300内に手動で配置し、真空ステーションのチャンバ304を真空にし、それによって試験試料を一括して試験試料装置100内に運ぶステップと、運搬が完了した後に、担体200を真空ステーションのチャンバ304から手動で取り除くステップと、担体200を真空ステーション300から離れた自動担体および試験装置処理サブシステム50内に手動で配置するステップと、担体を運搬システム1000で自動的に移動させるステップとを含む。担体は、自動的にa)試験試料装置を密封し(密封装置ステーション400)、b)試験試料装置を培養し(培養ステーション600)、c)試験試料装置を読み取る(読取ステーション800)モジュールを有する試験装置処理サブシステム50内に移動される。図に示すように、真空ステーション300と、担体および試験装置処理サブシステム50は、単一の一体型の小型試験試料処理器具10内に一体化される。
【0126】
開示された実施形態の詳細による変形形態が、試験装置の構成および他の要素によって期待される。本発明の範囲は、上記のことを鑑みて、添付の特許請求の範囲を参照して決まるものである。
【図面の簡単な説明】
【0127】
【図1】試験試料および試験試料装置処理用の小型一体化システムの好ましい実施形態の斜視図である。器具は担体に受け取られる試験試料装置の真空装填用の左側にある真空ステーションと、試験試料装置が真空ステーションによって装填された後に担体および試験試料装置を処理する右側にある別個の担体および試験試料装置処理サブシステムとを備える。
【図2】図1の器具の正面図である。
【図3】図1の器具の上面図である。
【図3A】前部ドアおよびパネルが開き、上部パネルおよびユーザアクセス上部が取り除かれた、図1の器具の正面図である。
【図3B】試験試料装置および試験管が真空チャンバ内に位置決めされた、装填担体の配置を示す、ドアが開いている真空チャンバの詳細正面図である。
【図4】器具内の特定のサブアセンブリおよびサブシステムの一般的な位置を示す、図1の器具のそれぞれ上面図および正面図であり、これらの図に慣れることは後の図面のより詳細な図、特に図16〜21を理解するのに有用である。
【図5】器具内の特定のサブアセンブリおよびサブシステムの一般的な位置を示す、図1の器具のそれぞれ上面図および正面図であり、これらの図に慣れることは後の図面のより詳細な図、特に図16〜21を理解するのに有用である。
【図6】多ウェル試験試料カードの形の試験試料装置の平面図である。図1〜5の器具は担体によって一度に図6の1束のカードを処理するように設計されている。担体は図6の複数の試験試料カードと、試験する流体試料を入れる複数の開口レセプタクル、例えば試験管を受け取る。
【図7】試験試料装置および開口レセプタクルを装填した担体の斜視図である。試験試料装置およびレセプタクルが担体内に配置されると、各試験試料装置が図示する運搬管により開口レセプタクル内の試料と流体連通されて配置される図である。
【図8】図7の空の担体の斜視図である。
【図9】図7の空の担体の別の斜視図である。
【図10】図7の担体の上面図である。
【図11】図7の担体の側面図である。
【図12】図11に示す担体の反対側の、図7の担体の側面図である。
【図13】ハンドルを示す、図7の担体の端面図である。
【図14】図7の担体の反対側の端面図である。
【図15】図7の担体の底面図である。
【図16】廃棄物収集および担体装填/脱装填ドアが取り除かれ、前部ユーザアクセスドアが取り除かれた、図1の器具の正面斜視図である。
【図17】器具のサブシステムおよびサブ構成部品、特に真空、廃棄物処理、および試験試料装置リーダサブシステムをよりよく図示するように、器具の前側および左手側を全体的に示す、器具パネルおよびドアのすべてが取り除かれた、図1から16の器具の斜視図である。
【図18】器具のサブシステムおよびサブ構成部品、特に廃棄物処理、シーラ、および培養ステーションサブシステムをよりよく図示するため、器具の前側および右手側を全体的に示す、器具パネルおよびドアのすべてが取り除かれた、図1から16の器具の別の斜視図である。
【図19】図16および17の器具の上面図である。
【図20】図16〜19の器具の正面図である。
【図21】器具の様々な構成部品およびサブシステムをよりよく図示するため、上部パネルが取り除かれた器具の上面斜視図である。
【図22】図20のシーラステーションの展開斜視図である。
【図23】図22のシーラステーションの別の展開斜視図である。
【図24】シーラアセンブリの組立斜視図である。
【図25】カード自動装填装置サブアセンブリの側面図である。
【図26】図25のカード自動装填装置サブアセンブリの斜視図である。
【図27】図1の器具の培養ステーション内にカードを装填する、図25および26のカード自動装填装置サブアセンブリの動作を示す二つの斜視図である。
【図28】図1の器具の培養ステーション内にカードを装填する、図25および26のカード自動装填装置サブアセンブリの動作を示す二つの斜視図である。
【図29】図1の器具内の担体および試験試料装置処理サブシステムの様々なモジュールおよびステーションを通して、図7〜17の担体を移動させる輸送アセンブリの展開斜視図である。
【図30】図29の輸送アセンブリの正面図である。
【図31】図29および30の輸送アセンブリの端面図である。
【図32】図29〜31の担体係合ブロックの詳細斜視図である。
【図33】器具内の特定の処理モジュールに対する、ここでは図25および26のカード自動装填装置サブアセンブリに対する担体の位置を検出する検出ステーションを通る装填担体の移動を示す図である。
【図34】器具および関連する担体、試験試料レセプタクル、および試験試料装置を使用する際のステップの流れおよび順序を示す詳細フローチャートである。
【図35】円形コンベヤをよりよく図示するように、前部カバーパネルを取り除いた培養ステーションを示す図である。
【図36】培養ステーション内の空気温度を直接測定する温度計へのアクセスを与える空気テーブル内のスロットを示すように、円形コンベヤを取り除いた培養ステーションを示す図である。
【図37】温度計を受け取るレセプタクルを備えた、培養ステーションの前部カバーの一部を示す図である。
【図38】温度計を保持するレセプタクルを示す、図27の培養ステーションの一部の側面図である。
【技術分野】
【0001】
(発明の背景)
(発明の分野)
本発明は生物学、微生物学、化学、または他のタイプの試料を試験する試験装置、関連する器具、およびシステムに関する。
【0002】
(関連技術の説明)
生物学および他のタイプの試料は、反応させ、透過率および/または蛍光光学分析を含む様々な技術を使用して、化学または光学分析を行うことができる。分析の目的は、試料中の知られていない生物剤または目標物を特定する、試料中の物質の濃度を決定する、または生物剤が特定の抗生物質に敏感であるかどうかと、生物剤によって起こる感染を治療するのに効果的である抗生物質の濃度を決定することであってもよい。
【0003】
1970年代半ばに、出願人の譲受人および前任者と一緒に働いていた技術者および科学者が、複数の小さな試料ウェルを含む密封された試験試料カードを使用して生物試料の光学分析を行う技術を開発した。この技術と、関連する器具および装置は「Vitek(登録商標)システム」として当業界で知られるようになった。Vitek(登録商標)システムは、商業的成功であった(また、現在もそうであり続ける)。
【0004】
Vitekシステムで使用されるカードは特許文献により既知である。例えば、米国特許第4,118,280号、第3,963,355号、第4,018,65号、第4,116,775号、および第4,038,151号を参照のこと。より最近版のカードが、米国意匠第382,647号、および第414,272号、特許第5,609,828号、第5,746,980号、第5,766,553号、第5,843,380号、第5,869,005号、第5,916,812号、第5,932,177号、第5,951,952号、および第6,045,758号に記載されている。
【0005】
カードは、試料中に存在する可能性がある知られていない微生物の識別、および抗生物質の正確にキャリブレーションされた濃度に対する既知の生物の感度の両方のためにカードが開発された。カードの製造中、ウェルは様々なタイプのいずれかの様々な生物剤用培養培地、あるいは異なる抗生物質の濃縮物で満たされ、透明な密封テープで覆われる。
【0006】
カードは、流体試料がカードの中に入ることを可能にする機構として外部運搬管ポートを有する。カードはさらに、流体が運搬管ポートからカードのウェルに入ることを可能にする内部流体通路構造を含む。ストロー状運搬管の一端部が運搬管ポートに挿入される。もう一方の端部は、試験される流体試料を入れる開口レセプタクル(例えば、試験管)に挿入される。従来技術のCharles他の特許、米国特許第4,188,280号の教示によると、取り付けられた運搬管および試験管を備えるカードは、Vitek(登録商標)フィラーシーラとして知られる独立型真空および充填密封機内に配置される。充填および密封機は真空を作り出す。真空が解放されると、流体試料は試験管から運搬管内に、およびカードの内部経路を通してすべての試料ウェル内のすべてに引き込まれる。従来技術のCharles他の第‘280号の器具では、カードのウェルに試料を装填した後、カードは機械内のシーラモジュール内のスロットに手動で挿入され、ここで運搬管が切断および溶融されて、カードの内部を密封する。
【0007】
カードはその後、フィラー/シーラモジュールから手動で取り除かれ、Charles他の第‘280号に記載されたVitek(登録商標)リーダとして知られる、読取培養機内に装填される。読取培養機は所望の温度でカードを培養する。カードのウェルの透過性試験を行う光学リーダが設けられる。基本的に、カードは読取機内の列内に積み重ねられ、光学システムはカードの列を上下に移動させて、カードを一つずつ透過性光学部品内に引き込み、カードを読み取り、カードの列内にカードを戻す。
【0008】
(Charles他の第‘280号に記載された)初期のVitekシステムの配列は、二つの機械、フィラー/シーラおよび読取装置がカードを処理および解析する必要があるという点において、いくつかの制限がある。さらに、カードの完全な解析を行うため、追加の時間および労力が必要である。出願人の譲受人は後に、本明細書で言及され、「Vitek2」器具として当業界で知られている、完全に自動化された器具を開発し、商品化した。Vitek2器具は真空装填および密封動作の両方を自動化し、単一の器具内で培養および読取と組み合わせた。器具全体は、米国特許第5,762,873号および第6,086,824号を含むいくつかの特許に記載されており、その内容を本明細書に参照として援用する。
【0009】
要するに、「Vitek2」システムは、感度試験用の希釈を行い、真空ステーションでカードに試料を充填し、運搬管を切断することによってカードを密封する自動試料試験機を提供し、カードの培養と光透過率および蛍光分析をすべて自動で行う。この機械は、新規のピペットおよび希釈ステーションを提供して、流体を試験管に追加する、または一つの試験管から別の試験管に運ぶことが可能になる。機械は、単一の試験管に配置された試料の感度および識別試験を同時に行うことが可能である。機械は、試料の迅速かつ自動的な識別および感度試験を行う。
【0010】
器具は、試料トレイまたは「ボート」、および様々なステーションの中の矩形ベースパンの周りで四つの独立経路内で「ボート」を移動させる試験試料位置決めまたは輸送システムを使用する。ユーザはカードが装填されたカセット、および試料を入れた試験管を装填ステーションでボート内に配置する。位置決めシステムの設計は、カスタム構造のステーションを基本的にベースパンの上にすることを可能にするようになっている。追加の円形コンベヤおよび読取ステーション、または追加の希釈ステーションまたは真空ステーションなどの中間進行ステーション内の追加のタイプを含むように機械を拡張することは容易に達成することができる。
【0011】
Vitek2器具の試験試料位置決めシステムは、米国特許第5,736,102号、第5,762,874号、第5,798,182号、第5,798,084号、第5,853,667号および第5,897,835号に記載されている。光学読取ステーションは、米国特許第5,798,085号、第5,853,666号および第5,888,455号に記載されている。培養ステーションは、米国特許第5,925,884号および第6,156,565号に記載されている。真空装填ステーションは、米国特許第5,965,090号に記載されている。切断密封ステーションは、米国特許第5,891,396号に記載されている。上記特許の全ての全体な内容を、本明細書に参照として援用する。
【0012】
元のVitekシステムと同様に、Vetek2システムもまた商業的成功を収めた。Vetek2システムは、高容量および高スループット試験システムに対する特定の需要があるより大きな診療所または試験室で特に好評である。しかし、より小さい研究室および診療所は、最新の診断および試料試験器具の機能および特性を必要としているが、必ずしもVitek2システムによって提供される高容量および総合自動操作を必要とはしない。Vitek2と同様であるが、より小型で、費用がかからず、あまり複雑でなく、中小規模の試料試験企業により適した、最新技術の試料処理器具に対する要求が当業界にはある。本発明は、この要求を満たす器具および操作方法を提供する。
【0013】
このような背景の説明は、最近の公知の従来技術に関して本発明の内容を記載しているが、本発明の処分システムの様々な態様および特性は、現在当業界で知られている、または後に開発される可能性のある他のタイプの試料試験および処理システムに適用することができる。したがって、発明者は本発明の範囲を、あらゆる特定の試料試験装置形式、器具、または試験規則に限らない。さらに、本発明のシステムの特性は、他のタイプの試験、生物学試料試験以外の他の器具構造、および本明細書に記載された特定の器具に適用することができる。本発明の範囲に関する全ての質問は、添付の特許請求の範囲を参照することによって回答されるものとする。
【0014】
(発明の概要)
第1の態様では、複数の試験試料、および試験試料を受け取る試験試料装置を処理する、一体型システムが説明されている。試験試料は、個別の流体レセプタクル内に受け取られる。器具は、複数の個別の流体レセプタクル、および複数の試験試料装置を担持する担体を備えている。試験試料装置はそれぞれ、個別の流体レセプタクルの一つに格納された試験試料と流体連通して配置されている。器具はさらに、担体を真空ステーション内に手動で挿入し、担体を真空ステーションから手動で取り除くようになっているドアを有する真空ステーションを備えている。真空ステーションはさらに、真空源を備えている。真空源は、試験試料を個別の流体レセプタクルからそれぞれの試験試料装置内に装填するように制御される。
【0015】
器具はさらに、担体および試験装置処理サブシステムを形成する一式の処理モジュールを備えている。これらのモジュールは、真空ステーションから離れて配置されている、すなわちユーザは担体を真空ステーションから手動で取り除き、その後、試験試料の真空装填が完了した後に担体を担体および試験装置処理サブシステム内に手動で装填しなければならない。これらのモジュールは、試験試料装置の光学測定を行うモジュールを含む。担体および試験装置処理サブシステム、および真空ステーションは、単一の器具に一体化される。
【0016】
第2の態様では、複数の試験試料および試験試料装置を処理する一体型システムが提供される。システムは、複数の個別の流体レセプタクル、および複数の試験試料装置を間隔を置いた関係で担持する担体を使用し、各試験試料装置は試験試料装置と担体内に受け取られた流体レセプタクルの一つの間で流体連通を行う運搬管を有する。システムは、担体を真空ステーション内に手動で挿入し、担体を真空ステーションから取り除くようになっている真空ステーションを備えている。第1のドアが、ユーザに真空ステーションへのアクセスを与える。器具はさらに、真空ステーションから離れて担体および試験装置処理サブシステムを備えている。担体および試験装置処理サブシステムは、運搬管を切断および密封し、試験装置を培養し、試験装置を読み取ることによって、試験装置を密封するモジュールまたは装置を備えている。ユーザが担体を担体および試験装置処理サブシステムに手動で挿入できるアクセスを与えるように、第2のドアが設けられている。
【0017】
別の態様では、試験試料装置で開口レセプタクルに入れられた複数の試験試料を処理する方法が提供される。レセプタクルおよび試験試料装置は、担体によって担持される。各試験試料装置は、試験試料装置と担体に受け取られた流体レセプタクルの一つの間で流体連通を行う運搬管を有する。この方法は、チャンバを有する真空ステーション内に担体を手動で配置し、真空ステーションのチャンバを真空にし、それによって試験試料を一括して試験試料装置内に運ぶステップと、運搬が完了した後に、前記真空ステーションのチャンバから担体を手動で取り除くステップと、真空ステーションから離れた自動担体および試験装置処理サブシステム内に担体を手動で配置するステップと、担体および試験装置処理サブシステム内の運搬システムで、試験試料装置を自動的に密封し、試験試料を培養ステーションに装填するモジュールまで担体を自動的に移動させるステップとを含む。試験装置はその後培養され、読取ステーションによって周期的に読み取られる。真空ステーションと、担体および試験装置処理サブシステムは単一の試験試料処理器具内に一体化される。
【0018】
(好ましい実施形態の詳細な説明)
(システム概要)
次に試験試料を処理する小型の高スループット器具の現在好ましい実施形態の概要を、図1〜5と合わせて説明する。器具の構成および動作の詳細は、図6〜34と合わせて後に説明する。
【0019】
器具10は、例示した実施形態で多ウェル試験試料カードの形の1束の試験試料装置を処理する。代表的な試験試料カード100が図6に示され、その後に説明する。カード100は、図7〜15に示すカセット(担体)200内に最初装填される。担体200はさらに、流体試料を入れた一式の流体レセプタクル(試験管)106(図7)を担持する。各試験試料装置100は、図6および7に示す、運搬管102によって関連する流体レセプタクル106と流体連通するように配置されている。試料は、以下に説明する方法で、器具10内の真空装填ステーションによってカード内に装填される。
【0020】
図1〜5の器具は、試料試験システム全体の試料処理およびデータ収集部である。システム全体は、試験試料装置上のバーコードが走査される別個の独立型識別ステーションを備え、カードは担体200内に装填され、担体はバーコードが供給され、走査される。これらの機能は、本明細書に参照として援用された、Fanning他の米国特許第5,869,006号の特許に記載された別個の識別システムと同様である。システム全体はさらに、器具内の読取システムからデータを受け取るコンピュータ処理システムを有するワークステーションを備えている。システム全体のこれらの識別およびコンピュータ処理態様は、本明細書に特に関連するものではなく、関連する限りにおいてのみ、さらに論じる。
【0021】
例示した器具は、臨床的および工業的市場の両方で、低範囲から中間範囲の応用例で使用するため、上記Fanning他の特許に記載されたシステムなどのより複雑な試料試験器具のより小さく、より低コストの代替物として設計された。器具は、以下に詳細に説明するように、試験試料装置の半自動充填、密封、および装填を行う。しかし、従来技術のFanning他の第‘006号特許およびVetek2器具は自動希釈およびピペット機能を支持したが、これらの機能は手動または他の装置を使用することによってのいずれかでユーザによってオフラインで行われる。すなわち、ユーザは試料を作製し、それによって関連する試験管から試験試料装置内に直接装填することができる。これらのオフライン作業は、図34のワークフローチャートと合わせてより詳細に論じる。
【0022】
Vitek2の器具の場合と同様に、図1〜5の器具10は図6の試験試料カード100のウェル104内に流体試料の培養用真空ステーション300を提供する。しかし、本システムでは、真空装填は完全に自動的にではなく、本明細書に説明するように半自動的に行われる。特に、ユーザは装填担体を真空ステーション内に手動で配置する。流体試料がカード100のウェル104内に入ると、流体試料は、製造時に前もってカードのウェル内に装填された試薬を再水和する。
【0023】
真空装填後、担体200は次いで、担体および試験試料装置処理サブシステム50を含む器具10内の別個の区画内に手動で配置される。このサブシステム50は、流体運搬管102を切断することによって、カードを密封するように作動する密封ステーション400を備えている。器具10は、培養ステーション600内にカード100を一つずつ自動的に装填するカード自動装填装置サブシステムを備えている。培養ステーション600は、カードを保持する回転円形コンベヤを備えている。カードは、正確に制御された温度で保持されている。培養システムは、円形コンベヤから一つずつカードを排出し、カード読取サブシステム800にカードを運ぶ運搬アセンブリ700上にカードを配置するカード排出機構を備えている。カード読取サブシステム800は、カード100のウェル104の周期比色分析読取を行う透過率光学素子ステーションを備えている。ソフトウェアアルゴリズムが、個別の試薬ウェル104のパターンの変化を決め、これらのパターンを生物識別または抗菌結果に翻訳する。読取が完全であるとみなされると、カード100がカード運搬アセンブリ700によって、ユーザが器具から取り除くようにカードを保持するカード処分システム900に送られる。読取がさらに必要な場合、カードは培養ステーション600内に戻るように移動されて、さらなる培養および追加の読取が行われる。
【0024】
器具10の担体および試験試料装置処理サブシステム50の内部で装填された担体200を前後に移動させるように、担体運搬システム1000が器具内に設けられる。運搬アセンブリ1000を図29〜33と合わせて説明する。
【0025】
図1〜5および16〜33の器具は、同時に60個以上の試験試料カードを処理する能力を与えるように、拡大または縮小することができる。この議論は、6個の完全に装填された担体(60個の試験試料装置)を順次処理する実施形態に焦点を当てる。より大きな円形コンベヤ培養ステーション、または第2の培養ステーション、第2の光学素子ステーション、および関連するカード運搬アセンブリを提供することによって、能力を2倍にできることが分かる。
【0026】
器具10は、試料ウェル(試験試料カード)充填および培養/光学読取のすべての制御を行う。器具10はまた、試験予備処理用の2ステップユーザワークフロー、すなわち試薬水和、および試料接種(真空装填)を支持する。試験予備処理の後に、器具内で自動的に行われるステップ、すなわち器具内の戦略的に配置されたバーコード読取装置を使用したカセットおよび試験セットアップ検証、カード運搬管密封、培養ステーション内の試験試料カードの装填、カードの読取、および脱装填、および処理された担体および試験管のユーザへの返却が行われる。培養システム600内へのカード100の装填の際、器具は、培養温度、光学読取、および試験処理期間中のワークステーションコンピュータ処理システムへのデータ転送を制御する。器具はその後、カード処分システム900内に試験試料カードを運搬することによって、試験終了の際にカードを排出する。
【0027】
(ドアおよびユーザインターフェース特性(図1〜3B))
最初に図1〜3Bを参照すると、器具10は内部試料処理装置を覆う一式のパネル12を備えている。内部処理装置が、図16以下に、より詳細に説明されている。パネル12は、器具内の真空装填システム300の一部である真空チャンバ304へのアクセスを提供する、ヒンジ付真空ドア302を備えている。ユーザは、完全にまたは部分的に装填されたカセット200(図7に示すように、運搬管102を介して関連する試験管106にそれぞれ連結された、一式の最大10個の試験試料カード100)を図3Bに示す方法で真空チャンバ304内に配置し、真空ドア302を閉じる。チャンバ304内に真空が引かれ、真空の解放により試験試料カード100のウェル内に流体試料を装填する。図4に示すように、真空システム300はさらに、真空チャンバ304に真空を供給する真空ポンプアセンブリ306を備えている。
【0028】
器具はさらに、ヒンジ付装填/脱装填ドア14を備えている。ユーザは、図3Aによく示した、担体装填および脱装填ステーション16を露出するようにこのドアを開き、(装填された)担体を担体および試験試料装置処理サブシステム50内に導入する。(真空装填がちょうど完了した)装填された担体200が、担体装填ステーション16で機械の中に配置されて、器具の次の処理(密封、培養、読取、処分)が行われる。器具内の運搬システム1000は装填された担体200と係合し、以下に詳細に説明するように、器具内のステーションに担体をユニットとして運ぶように前進する。
【0029】
器具はさらに、カード処分システム900の一部である廃棄物アクセスドア902を備えている。ドア902は、ユーザが廃棄物区画904へのアクセスを得る手段である。バケツの形の取外し可能レセプタクル(906、図16)は、廃棄物区画904内に配置されている。試験試料カードは、読取過程が完了した後に、バケツ906内に落とされる。バケツがいっぱいになると、バケツは取り除かれ、カードが廃棄され、バケツが廃棄物区画904内に再び配置される。
【0030】
器具はさらに、前部ユーザアクセスドア18と、上部ユーザアクセスドア20と、この議論に関係ない上部サービスパネル側部および後部パネルとを備えている。これらのドアにより、器具の周期的な洗浄、および器具内の構成部品の定期点検のためのアクセスが提供される。器具10の内部へのアクセスは、ユーザの安全のため、およびカードの中断されない処理を保証するように、処理中に制限される。器具10は、センサを介してすべてのドアの状態をモニターする。前部ユーザアクセスドア18および装填/脱装填ドア14などの移動部品へのアクセスを提供するドアはまた、モニターされるドアロックを有する。
【0031】
真空ドア302および装填/脱装填ドア14は、円形の窪み付きドアである。ドアは、真空チャンバ304から装填ステーション16までカセット200を遮られないで運ぶように、反対方向に旋回する。これらのドアのヒンジ内の戻り止めにより、ユーザが閉じる準備ができるまで、ドアを90°より大きく開いておくことが可能になる。ヒンジは窪みが付いており、ドアが閉じている場合に視界から隠される。
【0032】
器具は、小型のユーザインターフェース22を備えている。ユーザインターフェースは、図1に示すように、器具10の上部左側でユーザインターフェース前部パネル上に配置された、キーボードおよびLCDスクリーンを備えている。器具は、その動作および状態に関するメッセージを伝達するのにスクリーンを使用する。作業が完了した場合、または異常が起こった場合に、ユーザに通知するように、音響表示器がまたLCDディスプレイと合わせて使用される。指示に反応し、器具への命令を送信し、他の機能を行うように、キーパッドが使用される。真空ドアおよび装填/脱装填ドアの隣に配置された表示灯が、ユーザに追加の状態情報を提供する。
【0033】
(試験試料装置100の特性(図6))
例示した実施形態は、多ウェル試験試料カードの形の試験試料装置を処理するように設計されている。当業者は、器具およびその構成部品を、他のタイプの試験試料装置を処理するように構成することができ、本発明は試験試料装置のあらゆる特定の形式または設計に限られるものではないことが分かるだろう。
【0034】
代表的な試験試料カードが図6に示されている。カード100は、はっきりした酸素透過透明密封テープで覆われた表面と裏面を有する、平面の薄い物体である。カードは、64個の試験試料ウェル104と、各ウェル104を流体流入口110および流体分配マニホールドに連結させる内部流体通路ネットワーク108とを含む。流体運搬管102は、示した方法で流体流入口108内に自動的に挿入され、O’Bear他の米国特許第6,309,890号の教示を使用して定位置に係止されている。カードの真空装填中、流体試料120は流体運搬管102からカード100に入り、内部流体通路ネットワーク108の経路に沿って移動する。流体試料はカードのウェル104を満たし、ここで流体は乾燥試薬または培養培地を再び水和する。培養の状態で、カードのウェル内の試薬と流体試料内の微生物の間で反応が起こる。この反応の結果、ウェルを通る光の透過率が変わる。器具10内の光学素子は、特定の光波長での透過率測定を得ることによって、カード100のウェルを周期的に読み取る。
【0035】
例示した実施形態で使用されるカードは、特許文献で十分説明されており、それによってより詳細な議論は省く。読み手は、さらなる詳細について以下の米国特許第5,609,828号、第5,746,980号、第5,670,375号、第5,932,177号、第5,916,812号、第5,951,952号、第6,309,890号、および第5,804,437号を参照のこと。これらの特許はそれぞれ、本明細書に参照として援用する。
【0036】
(担体200の特性(図7〜15))
次に図7〜15を参照すると、担体200またはカセットは、一式の試験試料カード100および関連する試験管106を保持する成形プラスチック構成部品である。例示した実施形態では、担体200は特別に合わせたスロット202内に最大10個の試験カードを保持する。カセット200の前部204は、各試験管106用の試験管スロット206を有する。スロットは、識別する目的で、カセットの前部にわたって1〜10と番号が付けられている。右側のハンドル208により、片手で運ぶことが可能になる。取外し可能なバーコードラベル210が、平面パネル部215内で担体200の反対側に付けられている(図7および14参照)。バーコード210は、器具10内のバーコード読取装置によって読み取られた場合に、カセットの識別を行う。各試験試料カードには、図7に示すように、バーコード120が付けられている。
【0037】
ユーザは、充填過程のために担体を真空チャンバ304(図3A)内に配置する前に、担体200を患者分離体(または、より一般的には流体試料)の管106、および試験カード100で装填する。図3Bに示すような担体200の非対称形状、および真空チャンバ304内の受入構造により、担体200が器具内に適切に装填される(すなわち、ハンドル208が器具の前部に向かっている)ことが保証される。真空装填過程が終了すると、ユーザは真空チャンバ304に対してドア302を開き、担体200を真空チャンバ304から取り除き、装填/脱装填ステーション16内に配置する。
【0038】
担体200は、運搬システム1000の主な構成部品である。運搬システム1000内の特別なブロック特性により、運搬システムが担体および試験試料装置処理サブシステム50内の処理ステーションを通して担体を移動させ、装填/脱装填ステーション16に戻すことが可能になる。運搬システム内の光学遮断センサは、担体200の底部に形成されたスロット212(図8、9および15)を検出する。光学遮断センサおよびスロットにより、器具マイクロコントローラがカセット位置を追跡することが可能になる。遮断スロット212は、担体200の底部に形成されたリブ214に形成されたU字型空隙である。各スロット212は、その直接上にカードの位置と位置合わせされて位置決めされている。したがって、遮断センサがスロット212の位置を検出すると、関連するカードの位置も検出する。この特性により、自動密封動作の正確な担体位置決め、および培養ステーション内の入口スロット内への担体200からのカードの自動的な装填が簡単になる。
【0039】
(真空ステーション300の特性(図1〜4、7、17))
図1〜4および7を参照すると、ユーザは図7に示すような試験試料カード100および試験管106が装填された担体200を図3Aの真空チャンバ304内に配置し、ドア302を閉じる。真空過程が、ユーザインターフェース22のキーパッドにより作動される。真空チャンバのドア302上のシリコンシール306は、前部パネル表面308に対して押し付け、真空チャンバ304を密封する。真空ポンプアセンブリ306内の真空ポンプ(図4、17)は、チャンバ304から空気を引き始める。空気は、カード経路およびウェルから運搬管を介して、試験管106内の懸濁液または流体試料を通して上に逃げる。各カード内の経路およびウェルはここでは真空である。
【0040】
真空ステーションは、Fanning他の米国特許第5,965,090号に教示された真空変位原則を使用して、カードを試験管106内の培養懸濁液で満たす。この内容は、本明細書に参照として援用する。真空の変化速度は、マイクロコントローラ制御により、空気圧サーボフィードバックシステムによってモニターおよび調節される。
【0041】
特に、短期間の後に、真空は真空チャンバから制御された速度で解放される。チャンバ内の空気圧が増加することにより、各試験管106から運搬管102を通してカード100の内部流体経路およびウェル104内に懸濁液が押される。この経過の過程が、真空チャンバ内の担体内のすべてのカードと同時に起こる。その結果、担体200内のすべてのカード100が真空装填される。担体200はここで、図3Aの装填ステーション16内への挿入、および器具10の残りの担体および試験装置処理サブシステム50によるその中の処理の準備ができている。
【0042】
(担体および試験試料装置処理サブシステム(図1、4、5、16〜33))
次に、担体200および試験装置100は真空ステーション300内で処理され、担体200はここで装填ステーション16内に配置されるように準備され、本明細書では担体および試験試料装置処理サブシステム50と総称して呼ばれる、残りの器具のサブシステムによって処理される。この群の構成部品は、運搬システム1000と、密封ステーション400と、カード自動装填装置サブアセンブリ500と、培養ステーション600と、カード運搬サブシステム700と、光学読取ステーション800と、処分システム900とを含む。これらの特性を、この項目において、さらに詳細に説明する。
【0043】
(担体装填および脱装填ステーション16(図1、3A、16))
装填/脱装填ステーション16は、オペレータが充填されたカードの担体を手動で装填して、密封、培養、および読取過程を開始するところである。装填/脱装填ドア14(図1)は、ユーザが担体を装填または脱装填する準備ができない限り、常に係止されたままである。ドア14は図では、装填/脱装填ステーション16をよりよく図示するように、図16の器具から取り除かれる。
【0044】
装填された担体200(図3B、7)は、開口した装填/脱装填ステーションドア14を通して器具10内に装填される。装填領域内の反射センサ1040(図17)は、装填/脱装填ステーション16内の担体200の存在を感知するのに使用される。装填/脱装填ステーション16の上の表示灯32は、装填/脱装填ステーションの状態をユーザに示す。ドア14が閉じると、処理サイクルが自動的に開始する。
【0045】
運搬システム1000(図29〜33)は、以下に説明する方法で器具内で各処理ステーションを通して引っ張る、または押すことによって担体200を移動させる。器具マイクロコントローラは、担体200が配置される軌跡、および(上記)担体の底部に成形されたスロット212、および運搬システム1000内に戦略的に配置された光学センサ1050A〜C(図29)を利用する運搬システムの状態を保持する。運搬システム1000は、装填/脱装填ステーション16から、担体バーコード(図7)および試験試料バーコードが読み取られるバーコードスキャナ、シーラステーション400、およびカードが円形コンベヤ培養ステーション600内に装填されるカード自動装填装置ステーション500まで担体を移動させて、装填/脱装填ステーション16に戻して、担体200並びに試験管および運搬管102の残りを取り除く。担体は装填/脱装填ステーション16に置かれ、ドア14は係脱され、オペレータは装填/脱装填表示灯32によって通知される。担体200はその後取り除くことができ、処理した試験管106および運搬管102の廃棄物の処分が可能になり、試験カードおよび関連する流体試料の次バッチの試験のために担体を準備する。
【0046】
(バーコード読取装置ステーション60(図4、5、20、17))
バーコード読取装置ステーション60(図4、5)は、普通は読取ステーション800の下で器具10内に位置決めされる。ステーション60は、ステーションを通過するときに、各担体200および担体200内の試験カード(図7参照)に関するバーコード情報を自動的に走査する。バーコード読取装置ステーション60は、バーコードスキャナ62(図20)およびカードセンサ1042からなる(図17)。カードセンサ1042は、できるだけカセット内のカードの近くで培養アセンブリ600のハウジング上に配置される。カードセンサ1042は、担体200内のカード100の存在およびスロットの位置を確認する。担体の底部のスロット212により、運搬システム1000が各カードをバーコードスキャナ62内に位置決めすることが可能である。
【0047】
図7に示すように、各カード100は、試験タイプ、ロット番号、使用期限、および特有の連番などの情報を含む工場で付けられたバーコード120を有する。カードのバーコード120がカードを担体200内に装填するときに、別個のワークステーションで走査されると、器具のバーコード読取装置62は、カード100がユーザによって指示されるように装填されたことを確認することによって、追加レベルの安全性を提供する。バーコードが別個のワークステーションで走査されない場合(「装填および実行」モード)、カード100が指示するように担体200内に装填されることを確認するのに、実験室の技術者のワークシートを使用することができる。
【0048】
十分走査された担体200および試験カード100は、シーラステーション400に続くことが可能である。欠落したまたは損傷したバーコード、期限切れのカード、および対応していないカードタイプなどの異常によりステーション60で読み取ることができない担体200およびカード100が、装填/脱装填ステーション16、およびユーザインターフェース22または表示灯32により通知されたユーザまで戻される。ユーザは、限られた時間内で問題を修正し、担体200を再装填する機会が与えられている。
【0049】
(シーラステーション400(図4、6、7、および17〜24))
図4、6、7、および17〜24を参照すると、試験カード100を培養および読み取ることができる前に、試験試料カードのウェル104を外部環境から密封しなければならない。シーラステーション400は、一つずつ担体200内に装填されるすべてのカードにこの機能を提供する。シーラステーション400は、収縮式加熱ニクロムワイヤ402を使用して運搬管102を溶融および密封し、それによってカードを密封する。次にこの動作をより詳細に説明する。
【0050】
担体200を器具内に装填した後、運搬システム1000内の運搬ブロックは担体200と係合し、担体センサ1040、カードセンサ1042、およびバーコードスキャナ62を通して運搬システムトラックに沿ってカセット200を引っ張る。担体が検査に合格した場合、装填/脱装填ドア14に向かって運搬システム1000の軌跡に沿って移動し戻され、ここでシーラステーション400は担体200内のすべてのカードを切断および密封するように動作する。
【0051】
特に、担体200がステーション400を通って移動すると、熱ワイヤ402は担体200内の運搬管102の同じ平面にエンクロージャまたはハウジング406内の開口部404を通して下向きにある角度で平行移動され、それによって各運搬管102に曝される。担体200が担体運搬システム1000によってゆっくり前進すると、各運搬管は熱ワイヤ402を通して押される。熱ワイヤ402により、プラスチックの運搬管102が溶融されて、試験管106内に入る大部分の運搬管を分離させる。運搬管の残りが、カード内の流体流入口110から外側に延びる短い密封されたスタブ(例えば、長さが1.5mm)を形成する(図6)。密封処理が終了すると、電力がワイヤ402に対して遮断され、ユーザ接触をなくすようにそのハウジング406内に引っ込め戻される。ワイヤ402の温度は、本明細書に参照として援用する、Karl他の米国特許第5,891,396号に記載されたように、マイクロコントローラ制御された一定の電流源によって制御される。
【0052】
運搬管102を切断するシーラの動作全体は、Karl他の第‘396号特許に記載された過程に類似している。カード100がシーラを通して移動すると、運搬管102が熱ワイヤ402を通して押されて、プラスチックを溶融し、カードを密封する。ワイヤ402およびその関連するアセンブリ408はその後、ハウジング406内に収縮する。担体200はその後、担体200から横方向に、培養システム600の入口開口部内にカードを移動させるカード自動装填装置ステーション500に移動される。
【0053】
シーラアセンブリ400は、a)その電子制御方法、b)その機械的位置合わせ、c)運搬管を切断および密封する前に、器具内で各カードが固定構造物に対して偏倚される予備装填特性、およびd)無許可のユーザアクセスを防ぐ特性のいくつかの点において特有である。
【0054】
特性a)に関して、マイクロコントローラは、カード/カセットサイクル要件毎に開口部404を通してワイヤ400を収縮および伸長しながら、熱ワイヤ402内の一定の電流を維持することによって確実な切断および密封を保証する。
【0055】
特性b)に関して、シーラハウジングまたはエンクロージャ406は、ワイヤアセンブリ408および関連する駆動機構410をある角度に方向付けて、水平および垂直位置を制御するようにモータ412を一つだけ使用してワイヤ402の位置合わせが可能になる。ワイヤ位置合わせは、器具内へのハウジング406の取り付けまたはハウジングへの駆動機構410の位置合わせを調節することによって、および/またはファームウェア内のモータ412の限界位置を設定することによって達成される。
【0056】
特性c)およびd)に関して、ワイヤ402、その関連するアセンブリ408、および駆動機構410は通常ハウジング406内に配置されている。シールド416は入口開口部406を覆う。カードが密封位置にある場合、モータ412は付勢され、モータはワイヤアセンブリ408を開口部406を通してある角度で下に移動させるように働く。この動作により、シールド416が収縮位置まで範囲外で移動する。ワイヤアセンブリ408内にあり、ワイヤ402の前に配置されたばね装填パッド414は、カード100の縁部に接触し、コイルばね415を使用して、器具内の固定構造物または止め具に対してカード100を予備装填または偏倚させる。固定構造物は、培養ステーション600のハウジング602の面に沿って長さ方向に延びるレール604の形をしている。他の構成ももちろん可能である。ワイヤ402はその後、カード100が固定シーラワイヤ402を通して移動されると、均一なスタブ長さを作り出すように運搬管を切断する。密封動作が完了した後、モータ412は、ワイヤアセンブリ408をハウジング406内に収縮させるように付勢される。そうすると、回転シールド416は重力によって、開口部404を覆う閉位置まで収縮する。開口部404をこのように覆うことによって、ユーザの収縮された熱ワイヤ402へのアクセスを防止する。
【0057】
担体200がシーラステーションに近づくと、運搬システム1000はその移動を低速にする。シーラステーション400内のモータ412は、開口部404を通してワイヤサブアセンブリ408を移動させ、ワイヤ402を露出するように付勢する。パッドまたは「シュー」414は、シーラワイヤ402の約2.0mm前に取り付けられている。シューは、図22に示す圧縮ばね415によってばね装填されている。シューまたはパッド414は、単一の段付きねじ420に取り付けられ、回転防止特性を組み込む。カード100が熱ワイヤ402に近づくと、シュー414はカードと初期接触して、ばね415を偏向させ、培養アセンブリパネル602上のレール604(図27)に対してカード100を予備装填する。これにより、運搬管のスタブ長さの一貫性が保証される。熱ワイヤ402を通る担体200の前進動作により運搬管102が切断されて、プラスチック運搬管102を溶融し、各カードを密封する。担体内のすべてのカード100が密封された後、運搬システム100はまた、その軌跡に沿って方向を反対にし、各カードはカード自動装填装置システム500と位置合わせして配置されて、培養のために円形コンベヤ培養ステーション600内に装填される。
【0058】
好ましい実施形態のシーラワイヤ402は、金属エンクロージャまたはハウジング406内で摺動ブロック機構422上に取り付けられた、加熱18ゲージクロメルAワイヤである。ハウジング406は、駆動機構410をある角度に位置決めし、長いシーラワイヤ/予備装填シュー414を正確な高さに配置し、シーラワイヤ402および駆動機構へのユーザのアクセスを防止する。駆動機構410は、水平および垂直位置合わせを簡単にするように、ある角度で取り付けられている。ステッピングモータ412は、水平および垂直位置を同時に調節するように、水平から30度の角度で熱ワイヤ取付ブロック426を延ばす。この角度はもちろん、異なる実施形態で変化することができ、例えば20から70度までの間で変化することができる。シーラワイヤ402の正確な位置合わせは、1.0から2.5mmまでの均一なスタブ長さを保証するように、モータ412の限界を制御するファームウェアによって調節可能である。切断および密封動作が終了すると、ステッピングモータ412は、駆動システム内のブロック426上のフラッグ424がホーム位置センサ428によって感知されるまで、熱ワイヤアセンブリ408を収縮させる。(図22参照)アセンブリは、切断ワイヤ402に電流を供給するワイヤ446を保護するように働くチェーン448を備えている。
【0059】
熱ワイヤアセンブリ408および取付ブロック426が収縮すると、回転シールド416は重力によって降下し、ハウジング開口部404を覆う。シールド416は突起部430およびフランジ452を有する。フランジ452は、装置が組み立てられるときにハウジング406の細長い開口454内に位置決めされる。フランジ452は、ブロック426が収縮ホーム位置に近づくと、取付ブロック426のショルダ426に接触する。突起部430およびフランジ452は、ユーザがシールド416を持ち上げ、熱ワイヤへのアクセスを得るのを防ぐ。シーラモータ412が付勢されると、ピン462が駆動機構410内でスロット460を通してスライドし、それによって熱ワイヤ取付ブロック422を延ばす。保護シールド406は、シールドを上向きに回転させて熱ワイヤ402を露出させるブロック422の面と予備装填シュー414の間の接触によって押されて開く。マイクロコントローラは、カードが通過したときに運搬管を切断する適切な温度を作り出すのに十分な一定の電流をワイヤ402に供給して、プラスチックを溶融し、管の小さなスタブを残して、カードの内部を大気から密封する。
【0060】
(カード自動装填装置ステーション500(図20、および25〜28))
次に図20および25〜28を参照すると、器具10はさらに、密封されたカード100を培養ステーション600内に装填するカード自動装填装置ステーション500を備えている。カードが密封された後、担体200は自動装填装置ステーション500に移動される。担体200の底部のスロット212(図8)により、図28によく示すように、運搬システム1000は各カードを培養装置600の入口スロット610のすぐ前に位置決めすることが可能になる。担体内のスロットは、器具の内部マイクロコントローラによって自動的に決まり、追跡される。
【0061】
自動装填装置ステーション500は、担体200の上に配置された、往復運動モータ駆動プッシャ機構502を備えている。機構502は、培養ステーション600内の円形コンベヤ(図示せず)内の担体200から横方向にカード100を押す。培養ステーション600の円形コンベヤは、30または60個のスロットを有する側部に向けられた(水平軸周りに回転する)円形のコンベヤである。スロットの一つが、カード入口スロット610と直接位置合わせされて、6時の位置に位置決めされる。プッシャ機構502はホームに戻り、運搬システム1000および円形コンベヤは次のカード位置に動かされる。担体200内の次のカードの装填は、同じ方法で進行する。すべてのカードの装填が終了すると、運搬システム1000は担体200および試験管106を装填/脱装填ステーション14に戻し、表示器32およびユーザインターフェース22を介してユーザに通知する。
【0062】
次に特に図25〜28を参照すると、自動装填装置は、カードプッシャ機構502に取り付けられたブロック506を駆動するモータ504を備えている。ブロック506は、担体200の経路にわたって横方向に延びるねじ付きシャフト510と係合する雌ねじを有する。モータ504がブロック506を駆動すると、ブロック506および取り付けられたプッシャ502はガイド508に沿ってスライドする。プッシャ502は担体内のカード100と接触し、培養ステーション600のスロット610内にカードを自動的に挿入する。シャフト510およびガイド508の先端512および514は、図27および28に示すように、培養ステーションのハウジング602に取り付けられた板612内の開口部に受け取られる。1対のガイド612は、カード100をスロット610に案内する。
【0063】
(培養ステーション(図16〜20、35〜38))
器具10内の培養ステーション600を次に、図16〜20、35〜38と合わせて説明する。培養ステーションは円形のコンベヤ604(図35)を備えている。コンベヤは培養エンクロージャを形成する一組の取外し可能なアクセスカバー630によって覆われている。コンベヤは、図18に示すモータ632によって回転される。培養ステーション600およびその関連する円形コンベヤの構造および動作は基本的に、特許文献に記載されたものと同じである。本明細書に参照として援用する、米国特許第6,024,921号、第6,136,270号、および第6,155,565号を参照のこと。また、米国特許第5,762,873号を参照のこと。したがって、培養ステーション600の構成の詳細な説明は簡潔にするために省略する。
【0064】
試験試料カードが密封され、カードが入口スロット610を介して円形コンベヤ内に装填されると、試験期間中(最大18時間)、または所定の時間割当が満たされるまで、円形コンベヤ604内に留まっている。時間割当は、カードの各試薬またはタイプにより変化する。円形コンベヤは、アクセスパネル630によって囲まれた、温度制御チャンバ(培養装置)内に含まれる。
【0065】
好ましい実施形態の円形コンベヤ604自体は、米国特許第6,136,270号に教示された、共に最大60個の試験カードを培養装置内に保持することが可能な四つの象限(quadrant)(象限(quadrocell)または象限(quad)と呼ばれる)からなっている。代わりの構成も可能である。円形コンベヤの位置決めは、円形コンベヤの上部および底部に配置された光学センサによって達成され、円形コンベヤの外縁部上のスロットの位置決めとも理解できる。各円形コンベヤの象限(quadrant)は、洗浄のために独立して取り除くことができる。しかし、四つの円形コンベヤの象限(quad)はすべて、カードを処理するために、定位置に配置しなければならない。
【0066】
培養装置システムは、円形コンベヤ内のカードの温度を調節する。温度は、35.5±1℃の平均円形コンベヤ温度で維持されるマイクロコントローラによってモニターされた精密サーミスタの使用によりモニターおよび制御される。別個のユーザ設置プローブ温度計へのアクセスが、以下で説明するように培養装置カバーの前部に提供されている。これによりユーザは、別個のキャリブレーションされた温度計を使用して、培養装置の温度の精度を検証することが可能である。回転円形コンベヤシステムは、試験が終了するまで、1時間に4回、読取装置ステーション800にカードを移動させるカード運搬システム700に試験カードを運ぶ。読取装置ヘッド光学素子は各カードを走査し、培養装置に戻す。円形コンベヤは、円形コンベヤ内の12時の位置からカードを排出し、光学素子ステーション800への運搬用の試験カード運搬システム700(図16)内に配置して培養ステーション600に戻す、図18によく示すカード排出機構640を備えている。これは、例えば、米国特許第5,762,873号に記載されているものと同じである。
【0067】
図35は、円形コンベヤ604をよりよく図示するため、培養ステーションを取り除いたいくつかのカバーパネルを備える、図1の円形コンベヤ604および培養ステーション600の正面斜視図である。カバーパネルは、円形コンベヤ604用エンクロージャを形成し、円形コンベヤ604を大気状態から隔離する。
【0068】
円形コンベヤ604は垂直に取り付けられ、水平軸周りに回転する。空気が(円形コンベヤ604を入れた)培養ステーションの前部から隔壁652の後でステーションの後部まで循環することができるように、空気ダクト622が、ステーション600の上部に設けられる。ステーション内の大気の量を制御することができるように、隔壁652と平行かつその後に位置決めされた後部カバーパネル内に、小さな孔が配置されている。ダクト622は、空気を隔壁と後部カバーパネルの間で隔壁の後側に流すことができる、隔壁652内に開口部を備え、ここで空気は空気を加熱する加熱装置の上を通り過ぎ、図36に示す方法で、円形コンベヤ604の後に位置決めされた空気分配テーブル624内に第2のファンで吹き込まれる。
【0069】
円形コンベヤ604は、試験試料カードを受け取る複数のスロット614を有する。円形コンベヤは、円形コンベヤ装填ステーションで円形コンベヤの最低部、および空気テーブル624および隔壁652と対向する反対側の後側部で、カードがそれを通してスロット614内に案内される実質的に開口した前側部623を有する。
【0070】
図36は、培養ステーションの空気テーブル624および空気分配カバープレート625の特徴をよりよく図示するため、円形コンベヤ604を取り除いた、図35の培養ステーションの斜視図である。空気テーブル624は、隔壁652の後の加熱装置およびファンアセンブリから暖かい空気を受け取る。空気テーブル624は、円形コンベヤ604のスロット614と位置合わせして位置決めされた空気テーブル624を囲む空気分配カバープレート625を有する。カバープレート625は、暖められた空気を円形コンベヤの後側部、および円形コンベヤのスロット内のカードの上に導く、中に形成された複数の細長い開口部626を有する。カード上の適切な空気流を進めるため、空気分配カバープレート625に隣接し、これと反対側の円形コンベヤの後側部は実質的に開口しており、支障がなく、それによって試験試料カード上の空気流を実質的に遮断しないことが可能である。
【0071】
温度計プローブが空気テーブル624の内部にアクセスすることを可能にするように、切り欠き670が空気テーブルの側部に隣接して形成され、それによってユーザは、試験試料カードの上に空気が流れる前に、空気テーブル内の空気の即時温度読取を得ることが可能になる。図37に示すように、インサートリテーナまたはレセプタクル672が、切り欠き670と位置合わせして培養ステーションハウジングのカバーパネル602に取り付けられ、それによって温度計を定位置に保持する手段が提供される。レセプタクル672は、図38に示すように、温度計676を把持する突起674を備えている。温度計676の面は、温度を表示するディスプレイを備えている。温度計676のプローブが、図38に点線で示されている。
【0072】
本明細書に記載された温度モニタリングシステムは、このタイプの器具への適用において特有であると考えられる。本設計により、直接読出温度計676の一体化が簡単になる。温度計は、温度計の先端を空気テーブル624内の適切な角度および位置に位置決めするように、リテーナ672を使用して培養装置の空気テーブル温度を測定することが可能である。外部温度計676は、進行中の試験を妨げることなく、内部温度の直接かつ正確な読取を行う。
【0073】
本発明の温度モニタリングシステムは多くの特有な特徴を有しており、その中で最も重要なことは外部温度計の位置である。温度計プローブは、空気がカードに当たる直前に、暖かい空気を観察するように位置決めされている。空気はカードと交差する時に僅かに冷却され、モニターする温度はカードに当たり始めた空気温度であるので、この位置は重要である。培養装置の内部温度を正確に反映したアクセス可能な位置を見つけるため、広範囲の試験が行われた。温度計の位置決めは重要であり、システムのいくつかの特有な特性によって助けられる。第1に、温度計プローブの先端が嵌合する培養装置シャーシ内に成形された切り欠き670がある(図36参照)。この切り欠きにより、温度計は、そうでなければ到達できない空気テーブルの後に流れる空気を測定することが可能になる。温度計位置決めの第2の独特な特徴は、図38に示すように、温度計リテーナまたはレセプタクル672である。このマウントは、切り欠き内にプローブを位置決めするのに必要な角度で温度計676を保持する(図38参照)。傾斜した入口により、プローブは、円形コンベヤの動作に干渉することなく、円形コンベヤの上を通過することが可能になる。また、培養装置の隔壁652の前から適当な距離に温度計が保持され、したがってプローブの先端は隔壁に当たらない。マウントはまた、温度計を定位置に保持するクリップ674を有する。温度計は、レセプタクル672内にスナップ嵌めされ、視覚的読取に影響を与える三つの軸の何れかに沿って摺動することができない。しかし、温度計は定位置で回転することができる。というのは、これは温度読取の精度に影響を与えないからである。
【0074】
ユーザにとって便利な点は、システムが標準的な追跡可能な8分の1の直径のプローブ温度計を使用するように設計されていることである。温度計が故障またはキャリブレーションを失った場合、簡単に交換することができる。スナップ嵌めされたレセプタクルにより、温度計は洗浄およびキャリブレーションのために簡単に取り除くことも可能になる。このような外部モニタリングシステムは産業ユーザを念頭に置いて設計されたが、臨床ユーザも器具ファームウェアによって報告された温度を手動で確認する容易性を評価している。別の利点は、温度計によって報告される温度が即時的であるということである。ファームウェアは、培養装置の温度を連続した3分間の平均として報告するだけである。即時の温度が必要である場合、ユーザはこれを手動で簡単に測定することができる。適切な温度計676として、Fisher Scientific Traceable Jumbo Display Digital Thermometer(部品番号14−648−47)、およびVWR Scientific Products Jumbo Display Digital Thermometer(部品番号77776−720)が挙げられる。
【0075】
(カード運搬システム700(図16、17、および20))
図16、17および20によく示すように、器具はカード100内のウェル104を読み取るために、光学読取ステーション800を通して培養ステーション600からカードを運ぶカード運搬システム700を備えている。カード運搬システム700は基本的に、本明細書に参照として援用される、従来技術の米国特許第5,798,085号、第5,853,666号、および第5,888,455号に記載されたものと同じである。したがって、簡潔にするためより詳細な説明は省略する。基本的に、カードはベルト704と棚702の間に垂直な姿勢で保持され、ベルト704を前後に駆動するモータによって右から左に、および左から右に移動される。棚は、ベルトが棚を前後に駆動すると、カードを垂直位置に保持するスロット機構を備えている。カードが透過性光学素子ヘッドを通して移動されると、カードは、ウェルの幅にわたって多数の位置でカード内の各ウェルに対する透過率測定を得るため、以下に説明する正確な方法で移動される。カードは、光学システム内にウェルを正確に位置決めするように、内蔵位置合わせセンサ止め具孔130(図6)を備えている。
【0076】
(読取ステーション800(図4、5、16および17))
カードがカード運搬システム700内に配置されると、読取ステーション800を通して移動される。読取ステーションは、カードの内のウェルの列と同じ方向に垂直に向けられた二つの透過性光学素子モジュール802(図16および17参照)を備えている。各モジュール802は、1列のウェルから測定を得る。併せて、モジュール802は、カードのウェルの透過性測定を2列のウェルについて同時に得る。光学読取装置ステーション800の動作の構成および方法は基本的に、従来技術の米国特許第5,798,085号、第5,853,666号、および第5,888,455号に記載されたものと同じであり、したがって、簡潔にするために一般的な概要および議論のみを本明細書に記載する。これらの特許と異なり、例示した実施形態は透過性測定のみを提供するが、三つのモジュールを提供するようにモジュール802の一つを蛍光モジュール(米国特許第5,925,884号参照)と交換する、または蛍光モジュールを追加することによって、もちろん蛍光測定をこれらの特許で記載されたように行うことができる。追加のモジュールをもちろん、提供することができる。
【0077】
カード100は、透過性光学素子システムモジュール802によって位置決めおよび読取され、そこから排出される円形コンベヤスロットに戻される。器具内ではデータ分析は行われず、光学データが収集され、遠隔ワークステーションに伝達されて分析される。器具とワークステーションの間の通信が起こっていない場合に、生のデータを待ち行列に入れ、後にワークステーションに伝達することができる。
【0078】
読取装置ステーション800は、15分毎に1回、各カード100を走査する、すなわち1時間毎に4回の走査を行う。カードが読み取られる度に、次の読取サイクルまで、培養される円形コンベヤに戻る。最後の読取サイクルが終了した後、カードは光学素子を通してカード処分システム900まで運搬されて、カードを廃棄物収集容器内に排出する。
【0079】
読取装置システム800およびカード運搬システム700は共に、試験カードのウェル内で生物の成長を周期的にモニターするため、カード位置決めおよび光学データ収集を行う。各ウェル対時間の光透過率を測定することによって生物の成長を定量化するのに、光透過率データが使用される。例示した実施形態は現時点で、二つのタイプの光学素子モジュール802を支持している。第1のモジュール802は、各ウェルに対して660nmのLED照明源を有する。他のモジュール802は、各ウェルに対して428nmおよび568nmのLEDを有する。追加の波長を有する第3のモジュールの開発ももちろん可能である。
【0080】
各光学素子モジュール802は8個の測定LEDを有し、それによって1列毎に8個の試料ウェルを読み取ることができる。各カードは、1カード毎に合計64個のウェルに対して8(または16)列のウェルを有する。各モジュール802は、各ウェルに対して透過性LED光源だけでなく、ウェルを通過した後にLED光を捕捉する各ウェル用の検出器を備えている。検出器は、シリコン光ダイオードを使用する。8列の8個の試料ウェルを備えたカードがモジュール802の光経路(LEDから光ダイオードまで)を通して移動すると、サンプリングが起こる。カードが運搬システム700によって16の空間的に分離されたステップで移動されて、1ステップ毎に3回の読取を行うので、読取システムは各ウェルにわたって走査する。このデータはその後、ウェル内に形成されたあらゆる気泡の効果を少なくするように処理される。読取は円滑化され、ピーク値が選択される。
【0081】
モジュール802内のエミッタおよび検出器ハウジングは、修理および光学素子領域の洗浄のためのアクセスを容易にするためヒンジ付けされている。この検出システムは、30%から100%の透過率で空気を通して内部で自動キャリブレーションすることが可能である(無光から全光まで)。光学素子は、各カードを読み取る前に、空気を通して100%の透過率に自動的にキャリブレーションされる。
【0082】
(処分システム900(図16、17、20))
試験試料カード100の培養および光学試験が完了すると、カードは培養ステーション600内の円形コンベヤから自動的に取り除かれ、読取装置ステーション800を通過し、処分システム900に運ばれる。処分システムは、廃棄物容器906を保持する処分エンクロージャ904と、カードをカード運搬システム700の縁部から廃棄物容器906のすぐ上に位置決めされたシュート910内に導くランプ908とを備えている。廃棄物容器は、器具10から取外し可能であり、図1に示すドア902を介してアクセスされる。カードは、単に運搬システム700内のベルトを左側に操作して、左手側の棚702の縁部を通してカードを担持することによって、ランプ908に運ばれる。
【0083】
廃棄物収集ステーション900は、器具10の前で真空ステーション300の下に配置されている。このステーションは、容器が設置された場合に検出するように、取外し可能な廃棄物容器906(図16参照)およびセンサ(図示せず)を格納する。ユーザは、廃棄物容器906がユーザインターフェース22によりいっぱいになるまたは詰まった場合に通知される。器具内のソフトウェアは、空になった後に、容器に追加されるカードの数を追跡する。
【0084】
(担体運搬システム1000(図29〜33))
器具10は、担体および試験装置処理サブシステム50を通して装填および脱装填ステーション16から担体200を運ぶシステム1000を備えている。運搬システム1000は図では、システムの構成部品をよりよく図示するように、図29〜33では隔離されている。器具10内の様々なモジュールとの相互関係は、残りの図、例えば図17、19、および20の検討、および以下の議論により分かるであろう。
【0085】
基本的に、運搬システム100は担体200と、担体200を前後に移動させる運搬サブアセンブリ1002とを備えている。運搬サブアセンブリ1002は、以下に説明する方法で担体と係合するようになっているブロックの形のカセット係合部材1004を備えている。運搬サブアセンブリ1002は、ブロック1004および担体200を、担体装填および脱装填ステーション16、密封ステーション400、および培養装填ステーション500の間の単一の長手方向軸に沿って前後に移動させるように構成および配置されている。
【0086】
運搬サブアセンブリ1002は、ねじ付きシャフト1010を回転させる線形アクチュエータモータ1006を備えている。ねじ付きシャフト1010は、ブロック1004に取り付けられたねじ付きナット1005(図32)内に受け取られる。円筒形ガイド部材1008は、モータ/ガイドロッドマウント1018および前部ベアリングマウント1020の間に延びている。前部ベアリングマウント1020は、図29に示すように、運搬サブアセンブリ1002の基部1016に締め付けられている。1対のリフトピン1012は、ブロック1004内の開口部1024を通して駆動ナット係合スライド1022から上向きに延びる。リフトピンは、ばね1026によって下側位置まで偏倚され、それによってブロック1004が装填/脱装填ステーション14に位置決めされると、リフトピン1012の下縁部は基部1016に形成されたランプまたはカム表面1014と接触する。ブロック1004がモータ1006によって器具の後部に向かって移動されると、リフトピンはランプ1014の上に上がり、それによって開口部1024を通して延びる。この上部位置では、リフトピンはその後、担体200の下側の機構と接触することができ、それによってモータ1006がブロック1004を器具の後部に向かってバーコード読取ステーション60に移動させると、トラック1030に沿って担体を引っ張る。
【0087】
実際、図17に示す培養ステーションハウジングの側部に位置決めされた反射センサ1040は、装填および脱装填ステーション16内の担体の存在を検出する。線形アクチュエータモータ1006がシャフト1010を回転させると、ブロック1004は器具10の前部から移動され、二つのリフトピン1012が持ち上げられて試験試料担体200と係合する。ピン1012は、運搬サブアセンブリ1002の基部1016内に成形されたカム表面1014によって持ち上げられる。ピン1012は、ボールベアリングホイール(図示せず)を保持する駆動ナット係合スライド1022に取り付けられている。ボールベアリングは、モータ1006が器具の後部にブロック1004を移動させるように動かされた場合、カム表面1014の上に上がって、ピン1012を持ち上げる。担体200はその後、試験試料カードの数を数え、担体内の位置を決める、第2の反射センサ1042(また、図17に示す)を通して器具内に引き込まれる。担体200およびその試験試料カードはその後、試験試料カード100および担体200の上のバーコードを読み取るバーコード読取装置ステーション60に提示される。
【0088】
バーコードを読み取った後、モータは反転し、担体を装填および脱装填ステーション14に向かって器具の前部に向かって移動させる。前進移動中、密封ステーション400内の熱ワイヤが展開され、試験試料カードが密封される。モータ1006は再び反転し、担体200はカード自動装填装置ステーション500まで移動し、試験試料カードを担体200から培養ステーション600内に押し込むことができる場所に配置されている。
【0089】
三つの光学遮断センサ1050A、1050B、および1050C(図29および30)は、全体の移動にわたって担体200の位置を追跡する。三つのセンサ1050は、運搬サブアセンブリ基部1016内にスナップ嵌めされた単一のプリント基板1052に取り付けられる。担体200は、取外し可能および交換可能な磨耗ストリップ1054の上をスライドする。磨耗ストリップ1054は、担体200と基部1016の間の摩擦を最小限に抑える。
【0090】
上に記すように、線形アクチュエータステッピングモータ1006はブロック1004を移動する。ブロック1004はリフトピン1012を制限する。モータのシャフト1010は、サブアセンブリ1002の全長近く延びる。シャフト1010の端部は、図29によく示したピローブロックベアリング1020を回転させる。モータ縁部は、アルミニウムブラケット1018内に取り付けられる。モータ1006は、四つの振動制御グロメットおよび段付きねじを介して間接的にブラケット1018に取り付けられている。
【0091】
回転モータ1006は、シャフト1010の長さに沿ってアクメねじ付きナット1005(図32)を駆動する。ナット1005は、二つの振動制御グロメット1058および段付きねじ1060を介して駆動ブロック1004に間接的に結合された、アルミニウムブロック1056内に押し込まれる。段付きねじ1060により、ナット1005は自動位置合わせすることが可能になり、ナット1005とシャフト1010の結合が防止される。グロメット1058は、ナット1005によって発生する雑音が駆動ブロック1004を通して基部1016内に伝達するのを防ぐ。
【0092】
駆動ブロック1004は、ナット1005によって水平方向に移動される。器具の前部に向かって移動する場合、ブロック1004上のベアリング表面1060が、担体200の裏面220(図14)を押す。器具の後部に向かって移動する場合、二つのリフトピン112は駆動ブロック内の孔1024を通して持ち上がって、試料担体の裏側のリブ222と係合する(図15参照)。
【0093】
駆動ブロック1004が前部にある場合、ブロックは器具に挿入される新しい試料担体200用の止め具として働く。駆動ブロック1004が器具の後部にある場合、反射センサ1064(図29)はこれを検出し、器具マイクロコントローラにブロック1004がホーム位置にあることを表示する。
【0094】
三つの光学遮断センサ1050A、1050B、および1050Cは、プリント基板1050に取り付けられている。プリント基板1052の使用により、基部1016にセンサを直接取り付ける場合に必要なワイヤねじを排除する。センサ1050A、1050B、および1050Cは、上に説明するように、担体200の裏側の切り欠き212を検出する。各切り欠きは、試験試料カードの位置に対応する。センサは、カードカウンタ反射センサ位置(センサ1050A)、バーコード読取位置(センサ1050B)、および培養装填位置(センサ1050C)で、プリント基板上に配置されている。センサ1050A〜Cにより、担体の位置を連続的にモニターすることが可能になる。
【0095】
リフトピンサブアセンブリは、ホイールとして働く、ピンの基部に二つのボールベアリングローラ(図示せず)を含むアルミニウムブロック1022内に取り付けられた二つの垂直ピン1012からなる。ホイールがその上を転動する水平表面1066は、カムまたはランプ表面1014を提供するように、器具の前部の近くでステップ付けされる。ステップは、ホイールが上下に転動することが可能になるような角度をしており、ピン1012を上げ下げする。駆動ブロック1004とリフトピンサブアセンブリの本体の間のピン上の圧縮ばね1070により、カム1014を落下させる場合に、リフトピンアセンブリが落ちることを確実にする。
【0096】
レール1072は、前後への担体の移動を制限するように設けられている。磨耗ストリップ1054は、担体200が上を摺動する低摩擦および磨耗表面を提供するように、図29に示されたように、基部1016の左右水平表面上に取り付けられている。
【0097】
器具の培養ステーション600の前部カバー602は、運搬システムに三つの機能を提供する。第1に、水平リブ1080(図17)は、培養ステーション600内に挿入する前に、試験試料カードが担体200の右側から摺動するのを防ぐ。第2に、前部の近くに取り付けられた反射センサ1040(また、図17)は、担体200が装填ステーション内に存在するときを判断する。第3に、センサ1040のちょうど後に取り付けられたセンサ1042は試験試料カード100を計数し、担体200上の位置を決める。
【0098】
図3Aおよび16によく示すように、器具の前部パネルは、担体200に装填するように装填および脱装填ステーション16内のテーパ状通路を有する。担体200は、駆動ブロック1014に接触するまで挿入される。ドア14は閉じられ、センサ1040はキャリヤの存在を登録する。ドア14と駆動ブロック1004の間の空間は、担体200が装填および脱装填ステーション内に存在する場合に、反射センサ1040が常に担体200を検出する。
【0099】
(制御電子部品およびファームウェア)
器具10は、器具の様々なモジュールおよびサブシステムの動作を制御する制御電子部品およびファームウェアを備えている。制御電子部品は従来のものである。このような電子部品およびファームウェアは、当業界の現在の状況を考えて、本開示から当業者によって通常の努力で開発することができる。
【0100】
(ワークフロー(図34))
器具10のワークフローおよび処理ステップを次に、他の図と共に図34と合わせて説明する。ステップ1100では、ユーザは試料接種材料をオフラインで準備し、流体試料を試験管に装填し、カード100上のバーコードを走査し、カード100および試験管を担体(カセット)200内に装填する。バーコードは、別個のバーコードスキャナでオフラインで走査することができる。走査ステップは、試験される試料、使用されるカード上のバーコードの走査、および担体バーコードの走査に関する情報を受け取るようにプログラミングされたワークステーションまたはコンピュータを有する別個の識別ステーションで行うことができる。
【0101】
ステップ1102では、ユーザは真空チャンバドア302を開き、装填された担体(図7に示す)を真空チャンバ304内に装填する。図3A参照のこと。ユーザはその後、ドア302を閉じ、それによってチャンバを密封する。
【0102】
ステップ1104では、ユーザはユーザインターフェース22のキーパッドを介してカードを充填する真空サイクルを開始する。
【0103】
ステップ1106では、真空ポンプは付勢され、真空が真空チャンバ304の内側に生成される。真空変位により、上記の方法で担体内のカードが充填される。
【0104】
ステップ1108では、試薬充填が成功したかどうか確認するように試験が行われる。試薬充填を保証するために真空勾配および時間をモニターする。
【0105】
ステップ1110では、試薬充填が成功しなかった場合、担体処理はステップ1112で示すように中断され、ユーザは真空ステーション300から担体200を取り除く。
【0106】
ステップ1114では、試薬充填が成功した場合、ユーザは真空チャンバ304から担体を脱装填する。
【0107】
ステップ1116では、ユーザはドア14を開き、担体を装填および脱装填ステーション16内に手動で配置する。担体の検出は、センサ1040によって行われる(図17)。
【0108】
ステップ1118では、運搬システム1000は、担体200をバーコード読取装置ステーション60に移動させる。途中で、担体に装填されたカード1000がカードセンサ1042によって検出される(図17)。
【0109】
ステップ1120では、担体内およびカード上のバーコードが、読取装置ステーション60内のバーコードスキャナによって読み取られる。担体およびカード用バーコードは、オフラインで走査されたバーコードと比較される(このような走査が行われた場合)。
【0110】
ステップ1122では、器具はバーコード読取が成功したかどうかを判断する。成功でない場合、過程はステップ1124に進み、ここで運搬システム1000は担体を装填/脱装填ステーション16に戻すように移動させ、ドア14が係脱される。ステップ1126では、ユーザは可能であればエラーを修正する。
【0111】
バーコード読取が成功した場合、過程はステップ1128に進む。このステップでは、運搬システムは担体をシーラステーション400に移動させる。
【0112】
ステップ1130では、シーラステーション400は、上記の方法で担体内に各試験試料カードを密封するように働く。運搬管残留物は、試験管内に落ちる。残りのスタブは試験試料カードを密封する。
【0113】
ステップ1132では、すべてのカードの密封が成功したかどうか判断するように検査を行う。これは、熱シーラワイヤ電流をモニタリングし、シーラモータステップをモニタリングし、運搬モータステップおよびエラーがない場合に動作しているシーラをモニターすることによって行われる。
【0114】
密封ステップが成功しなかった場合、過程はステップ1142に進み、試験が中断し、処理はステップ1138に進む。
【0115】
密封ステップが成功した場合、ステップ1134で示されるように、運搬システム1000は担体200をカード自動装填装置システム500に移動させる。カード自動装填装置は、前に説明されている。
【0116】
ステップ1136では、カード自動装填装置ステーション500は、培養ステーション600内の円形コンベヤ内に一つずつカードを装填するように働く。培養装置円形コンベヤは、次のカードに対応するように、あらゆる利用可能な位置に回転する、または動かすことができる。
【0117】
ステップ1138では、ステップ1136が終了した後、運搬システム1000は試験管および運搬管残留物を備える担体を装填および脱装填ステーション16に移動させる。
【0118】
ステップ1140では、ユーザは担体200を取り除き、試験管および内容物を処分する。担体は次に再利用の準備ができている。
【0119】
ステップ1144では、次にカード100は培養ステーション600内に格納され、ここで一定の温度で培養される。
【0120】
ステップ1146では、カードは円形コンベヤ内のスロットから周期的に押し出され、カード運搬システム700内に配置され、ここで読取システム800に対して前後に往復運動される。カード内のすべてのウェルの読取は、15分毎に起こるように設計されている。
【0121】
ステップ1148では、光学素子モジュール802によって得られる透過率測定値は、器具10内の通信ポートまたはインターフェースを介して別個のワークステーションに伝達される。
【0122】
ステップ1150では、カードの読取が完了したかどうかを判断する検査が行われる。これは、カードの周期的な読取によって示される試料識別、あるいは決定できた試料感度のように一つまたは複数のウェル内で反応が起こっているかどうかによって見出される。試験が完了しない場合(すなわち、もっと読取が起こる必要がある場合)、処理は経路1152に進み、カードは円形コンベヤ内のスロットに送り戻されて、さらなる培養および追加の読取を行い、ステップ1144、1146、1148、および1150が繰り返される。
【0123】
ステップ1150で、読取が完了した場合、処分ステーションエンクロージャ904内の廃棄物容器がいっぱいであるかどうかを確認する試験が行われる。そうである場合、ユーザはステップ1158で通知される。そうでない場合、カード運搬システム700はカードを棚702の端部を通して左側にずっと移動し、カードは処分システムシュート910内に落ち、エンクロージャ904内の廃棄物容器内に落ちる。
【0124】
ステップ1162では、ユーザは廃棄物容器を定期的に空にする。
【0125】
上述の説明から、開口レセプタクル106に入れられた複数の試験試料を試験試料装置100で処理する方法であって、レセプタクルおよび試験試料装置は担体200によって担持され、各試験試料装置100は、図7に示すように、試験試料装置100と担体200内に受け取られた流体レセプタクル106の一つの間を流体連通させる運搬管102を有する方法を説明したことが分かるだろう。この方法は、担体200をチャンバ304を有する真空ステーション300内に手動で配置し、真空ステーションのチャンバ304を真空にし、それによって試験試料を一括して試験試料装置100内に運ぶステップと、運搬が完了した後に、担体200を真空ステーションのチャンバ304から手動で取り除くステップと、担体200を真空ステーション300から離れた自動担体および試験装置処理サブシステム50内に手動で配置するステップと、担体を運搬システム1000で自動的に移動させるステップとを含む。担体は、自動的にa)試験試料装置を密封し(密封装置ステーション400)、b)試験試料装置を培養し(培養ステーション600)、c)試験試料装置を読み取る(読取ステーション800)モジュールを有する試験装置処理サブシステム50内に移動される。図に示すように、真空ステーション300と、担体および試験装置処理サブシステム50は、単一の一体型の小型試験試料処理器具10内に一体化される。
【0126】
開示された実施形態の詳細による変形形態が、試験装置の構成および他の要素によって期待される。本発明の範囲は、上記のことを鑑みて、添付の特許請求の範囲を参照して決まるものである。
【図面の簡単な説明】
【0127】
【図1】試験試料および試験試料装置処理用の小型一体化システムの好ましい実施形態の斜視図である。器具は担体に受け取られる試験試料装置の真空装填用の左側にある真空ステーションと、試験試料装置が真空ステーションによって装填された後に担体および試験試料装置を処理する右側にある別個の担体および試験試料装置処理サブシステムとを備える。
【図2】図1の器具の正面図である。
【図3】図1の器具の上面図である。
【図3A】前部ドアおよびパネルが開き、上部パネルおよびユーザアクセス上部が取り除かれた、図1の器具の正面図である。
【図3B】試験試料装置および試験管が真空チャンバ内に位置決めされた、装填担体の配置を示す、ドアが開いている真空チャンバの詳細正面図である。
【図4】器具内の特定のサブアセンブリおよびサブシステムの一般的な位置を示す、図1の器具のそれぞれ上面図および正面図であり、これらの図に慣れることは後の図面のより詳細な図、特に図16〜21を理解するのに有用である。
【図5】器具内の特定のサブアセンブリおよびサブシステムの一般的な位置を示す、図1の器具のそれぞれ上面図および正面図であり、これらの図に慣れることは後の図面のより詳細な図、特に図16〜21を理解するのに有用である。
【図6】多ウェル試験試料カードの形の試験試料装置の平面図である。図1〜5の器具は担体によって一度に図6の1束のカードを処理するように設計されている。担体は図6の複数の試験試料カードと、試験する流体試料を入れる複数の開口レセプタクル、例えば試験管を受け取る。
【図7】試験試料装置および開口レセプタクルを装填した担体の斜視図である。試験試料装置およびレセプタクルが担体内に配置されると、各試験試料装置が図示する運搬管により開口レセプタクル内の試料と流体連通されて配置される図である。
【図8】図7の空の担体の斜視図である。
【図9】図7の空の担体の別の斜視図である。
【図10】図7の担体の上面図である。
【図11】図7の担体の側面図である。
【図12】図11に示す担体の反対側の、図7の担体の側面図である。
【図13】ハンドルを示す、図7の担体の端面図である。
【図14】図7の担体の反対側の端面図である。
【図15】図7の担体の底面図である。
【図16】廃棄物収集および担体装填/脱装填ドアが取り除かれ、前部ユーザアクセスドアが取り除かれた、図1の器具の正面斜視図である。
【図17】器具のサブシステムおよびサブ構成部品、特に真空、廃棄物処理、および試験試料装置リーダサブシステムをよりよく図示するように、器具の前側および左手側を全体的に示す、器具パネルおよびドアのすべてが取り除かれた、図1から16の器具の斜視図である。
【図18】器具のサブシステムおよびサブ構成部品、特に廃棄物処理、シーラ、および培養ステーションサブシステムをよりよく図示するため、器具の前側および右手側を全体的に示す、器具パネルおよびドアのすべてが取り除かれた、図1から16の器具の別の斜視図である。
【図19】図16および17の器具の上面図である。
【図20】図16〜19の器具の正面図である。
【図21】器具の様々な構成部品およびサブシステムをよりよく図示するため、上部パネルが取り除かれた器具の上面斜視図である。
【図22】図20のシーラステーションの展開斜視図である。
【図23】図22のシーラステーションの別の展開斜視図である。
【図24】シーラアセンブリの組立斜視図である。
【図25】カード自動装填装置サブアセンブリの側面図である。
【図26】図25のカード自動装填装置サブアセンブリの斜視図である。
【図27】図1の器具の培養ステーション内にカードを装填する、図25および26のカード自動装填装置サブアセンブリの動作を示す二つの斜視図である。
【図28】図1の器具の培養ステーション内にカードを装填する、図25および26のカード自動装填装置サブアセンブリの動作を示す二つの斜視図である。
【図29】図1の器具内の担体および試験試料装置処理サブシステムの様々なモジュールおよびステーションを通して、図7〜17の担体を移動させる輸送アセンブリの展開斜視図である。
【図30】図29の輸送アセンブリの正面図である。
【図31】図29および30の輸送アセンブリの端面図である。
【図32】図29〜31の担体係合ブロックの詳細斜視図である。
【図33】器具内の特定の処理モジュールに対する、ここでは図25および26のカード自動装填装置サブアセンブリに対する担体の位置を検出する検出ステーションを通る装填担体の移動を示す図である。
【図34】器具および関連する担体、試験試料レセプタクル、および試験試料装置を使用する際のステップの流れおよび順序を示す詳細フローチャートである。
【図35】円形コンベヤをよりよく図示するように、前部カバーパネルを取り除いた培養ステーションを示す図である。
【図36】培養ステーション内の空気温度を直接測定する温度計へのアクセスを与える空気テーブル内のスロットを示すように、円形コンベヤを取り除いた培養ステーションを示す図である。
【図37】温度計を受け取るレセプタクルを備えた、培養ステーションの前部カバーの一部を示す図である。
【図38】温度計を保持するレセプタクルを示す、図27の培養ステーションの一部の側面図である。
【特許請求の範囲】
【請求項1】
個別の流体レセプタクル内に受け取られる試験試料を受け取るように、複数の試験試料および試験試料装置を処理する一体型システムであって、
複数の前記個別の流体レセプタクル、および複数の前記試験試料装置を担持する担体であって、前記試験試料装置はそれぞれ、前記個別の流体レセプタクルの一つに格納された試験試料と流体連通して配置されている担体と、
前記担体を真空ステーション内に手動で挿入し、前記担体を真空ステーションから手動で取り除くようになっていると共に、さらに前記試験試料を前記個別の流体レセプタクルからそれぞれの試験試料装置内に装填するように制御された真空源を備えた真空ステーションと、
前記試験試料装置の光学測定を行うモジュールを含む、前記担体および試験試料装置を処理するモジュールを備えた、前記真空ステーションから離れた担体および試験装置処理サブシステムとを備えたシステムであって、
前記担体および試験装置処理サブシステムと、前記真空ステーションは単一の器具に一体化され、前記担体は前記試験試料の真空装填の完了後に、前記担体および試験装置処理サブシステム内に手動で装填されるシステム。
【請求項2】
前記担体および試験装置処理サブシステムは、前記担体が受け取られる装填ステーションと前記モジュールの間で単一の長手軸に沿って前記担体を移動させる運搬システムを備える、請求項1に記載のシステム。
【請求項3】
前記モジュールはさらに、前記試験試料装置を密封する密封ステーションを備える、請求項2に記載のシステム。
【請求項4】
前記モジュールはさらに、培養ステーションと、前記試験試料装置が前記担体から自動的に取り除かれ、前記培養ステーション内に挿入される自動装填ステーションとを備える、請求項3に記載のシステム。
【請求項5】
前記担体および試験装置処理サブシステムは、
1)前記真空ステーションから離れた担体装填および脱装填ステーションと、
2)前記担体を前記装填および脱装填ステーションから前記担体および試験装置処理サブシステムを通して運ぶ運搬システムと、
3)前記試験試料装置を密封する密封システムと、
4)前記試験試料装置を培養する培養ステーションと、
5)前記試験試料装置を前記担体から前記培養ステーション内に移動させる自動装填ステーションと、
6)前記試験試料装置を読み取る読取ステーションと、
7)前記試験試料装置の読取の完了後に、前記試験試料装置を受け取る処分システムとを備える、請求項1に記載のシステム。
【請求項6】
a)前記担体、およびb)前記試験試料装置に付けられた機械読取可能な印を読み取る少なくとも一つの読取装置を有する担体読取ステーションをさらに備える、請求項1に記載のシステム。
【請求項7】
前記試験試料装置は、多ウェル試験試料カードを備える、請求項1に記載のシステム。
【請求項8】
前記運搬システムは、前記担体と係合するようになっている担体係合部材を備え、前記運搬システムは、前記担体装填および脱装填ステーション、前記密封ステーション、および前記自動装填ステーションの間で単一の長手軸に沿って前記担体を前後に移動させるように構成および配置されている、請求項5に記載のシステム。
【請求項9】
前記器具を覆い、さらに前記器具の前部を形成する一式のパネルと、
前記システム用ユーザインターフェースと、
前記担体を前記真空ステーション内に装填するようにアクセスを与える第1のドアと、
前記担体を前記担体および試験装置処理サブシステム内に装填するようにアクセスを与える第2のドアと、
前記モジュールによって前記試験装置の処理の完了後に、前記試験装置を受け取る処分システムへのアクセスを与える第3のドアとをさらに備える、請求項1に記載のシステム。
【請求項10】
個別の流体レセプタクルに受け取られる試験試料を受け取るように、複数の試験試料および試験試料装置を処理し、前記複数の流体レセプタクル、および前記複数の試験試料装置を間隔を置いた関係で保持する担体で使用される一体型システムにおいて、前記試験試料装置はそれぞれ、前記試験試料装置と前記担体内に受け取られた前記流体レセプタクルの一つの間を流体連通する運搬管を有するシステムであって、
前記担体を真空ステーション内に手動で挿入し、前記担体を真空ステーションから取り除くようになっていると共に、さらに前記試験試料を前記個別の流体レセプタクルからそれぞれの試験試料装置内に装填するように制御された真空源を備えた真空ステーションと、
前記真空ステーションへのアクセスを与える第1のドアと、
前記試験装置を密封し、前記試験装置を培養し、前記試験装置を読み取る装置を備える、前記真空ステーションから離れた担体および試験装置処理サブシステムと、
前記担体に前記担体および試験装置処理サブシステムへのアクセスを与える第2のドアとを備えるシステム。
【請求項11】
前記担体および試験装置処理サブシステムは、
1)前記担体を前記担体および試験装置処理サブシステムに手動で挿入し、前記担体を前記担体および試験装置処理サブシステムから取り除くようになっている、前記真空ステーションから離れた担体装填および脱装填ステーションと、
2)前記担体を前記装填および脱装填ステーションから前記担体および試験装置処理サブシステムを通して運ぶ運搬サブアセンブリと、
3)前記運搬管を切断し、前記試験試料装置を密封する密封システムと、
4)前記試験試料装置を培養する培養ステーションと、
5)試験試料装置を前記担体から前記培養ステーション内に移動させる自動装填ステーションと、
6)前記試験試料装置を読み取る読取ステーションと、
7)前記試験試料装置の読取の完了後に、前記試験試料装置を受け取る処分システムとを備える、請求項10に記載のシステム。
【請求項12】
前記運搬サブアセンブリは、前記担体と係合するようになっている担体係合部材を備え、前記運搬サブアセンブリは、前記担体装填および脱装填ステーション、前記密封ステーション、および前記自動装填ステーションの間で単一の長手軸に沿って前記担体を前後に移動させるように構成および配置されている、請求項11に記載のシステム。
【請求項13】
前記処分システムへのアクセスを与える第3のドアをさらに備える、請求項10に記載のシステム。
【請求項14】
開口レセプタクル内に入れられた複数の試験試料を試験試料装置で処理する方法において、前記レセプタクルおよび試験試料装置は担体によって担持され、前記試験試料装置はそれぞれ、前記試験試料装置と前記担体内に受け取られた前記流体レセプタクルの一つの間を流体連通させる運搬管を有する方法であって、
チャンバを有する真空ステーション内に前記担体を手動で配置し、前記真空ステーションのチャンバを真空にし、それによって前記試験試料を一括して前記試験試料装置内に運ぶステップと、
前記運搬が完了した後に、前記真空ステーションのチャンバから前記担体を手動で取り除くステップと、
前記真空ステーションから離れた自動担体および試験装置処理サブシステム内に前記担体を手動で配置するステップと、
前記担体および試験装置処理サブシステム内の運搬システムで、自動的にa)前記試験試料装置を密封し、b)前記試験試料装置を培養し、c)前記試験試料装置を読み取るモジュールまで前記担体を自動的に移動させるステップとを含む方法であって、
前記真空ステーションと、前記担体および試験装置処理サブシステムは、単一の試験試料処理器具に一体化される方法。
【請求項15】
前記担体および試験装置処理サブシステムはさらに、
1)前記担体を前記担体および試験装置処理サブシステムに手動で挿入し、前記担体を前記担体および試験装置処理サブシステムから手動で取り除くようになっている担体装填および脱装填ステーションと、
2)前記担体を前記装填および脱装填ステーションから前記担体および試験装置処理サブシステムを通して運ぶ運搬サブアセンブリと、
3)前記試験試料装置を密封する密封システムと、
4)前記試験試料装置を培養する培養ステーションと、
5)試験試料装置を前記担体から前記培養ステーション内に移動させる自動装填ステーションと、
6)前記試験試料装置を読み取る読取ステーションと、
7)前記試験試料装置の読取の完了後に、前記試験試料装置を受け取る処分システムと、
8)バーコード読取ステーションと、
9)担体および試験試料装置検出ステーションとを備える、請求項14に記載の方法。
【請求項16】
前記運搬サブアセンブリは、前記担体と係合するようになっている担体係合部材を備え、前記運搬サブアセンブリは、前記担体装填および脱装填ステーション、前記密封ステーション、および前記自動装填ステーションの間で単一の長手方向に沿って前記担体を前後に移動させるように構成および配置されている、請求項15に記載の方法。
【請求項17】
前記試験試料装置は、多ウェル試験試料カードを備える、請求項14に記載の方法。
【請求項18】
前記培養ステーションの温度を測定し、前記培養ステーションの内側の即時温度を視覚的に示す温度計へのアクセスを与えるカバーパネルを有する培養ステーションをさらに備える、請求項1に記載のシステム。
【請求項19】
前記培養ステーションはさらに、円形コンベヤと、空気がそれを通して前記円形コンベヤに供給される空気分配チャンバとを備え、前記温度計は前記空気分配チャンバの温度をモニターする、請求項18に記載のシステム。
【請求項20】
前記培養ステーションの温度を測定し、前記培養ステーションの内側の即時温度を視覚的に示す温度計へのアクセスを与えるカバーパネルを有する培養ステーションをさらに備える、請求項10に記載のシステム。
【請求項21】
前記培養ステーションはさらに、円形コンベヤと、空気がそれを通して前記円形コンベヤに供給される空気分配チャンバとを備え、前記温度計は前記空気分配チャンバの温度をモニターする、請求項20に記載のシステム。
【請求項22】
器具エンクロージャへのユーザアクセスを制御およびモニターするセンサおよびロックのシステムをさらに備える、請求項1に記載のシステム。
【請求項23】
前記担体および前記試験試料装置上のバーコードを読み取るバーコード読取ステーションをさらに備える、請求項10に記載のシステム。
【請求項24】
前記担体の存在、および前記担体内の前記試験試料装置の存在および位置を判断するセンサステーションをさらに備える、請求項10に記載のシステム。
【請求項25】
バーコード読取ステーションと、前記担体の存在および前記担体内の前記試験試料装置の存在および位置を判断するステーションに前記担体を移動させるステップをさらに含む、請求項14に記載の方法。
【請求項1】
個別の流体レセプタクル内に受け取られる試験試料を受け取るように、複数の試験試料および試験試料装置を処理する一体型システムであって、
複数の前記個別の流体レセプタクル、および複数の前記試験試料装置を担持する担体であって、前記試験試料装置はそれぞれ、前記個別の流体レセプタクルの一つに格納された試験試料と流体連通して配置されている担体と、
前記担体を真空ステーション内に手動で挿入し、前記担体を真空ステーションから手動で取り除くようになっていると共に、さらに前記試験試料を前記個別の流体レセプタクルからそれぞれの試験試料装置内に装填するように制御された真空源を備えた真空ステーションと、
前記試験試料装置の光学測定を行うモジュールを含む、前記担体および試験試料装置を処理するモジュールを備えた、前記真空ステーションから離れた担体および試験装置処理サブシステムとを備えたシステムであって、
前記担体および試験装置処理サブシステムと、前記真空ステーションは単一の器具に一体化され、前記担体は前記試験試料の真空装填の完了後に、前記担体および試験装置処理サブシステム内に手動で装填されるシステム。
【請求項2】
前記担体および試験装置処理サブシステムは、前記担体が受け取られる装填ステーションと前記モジュールの間で単一の長手軸に沿って前記担体を移動させる運搬システムを備える、請求項1に記載のシステム。
【請求項3】
前記モジュールはさらに、前記試験試料装置を密封する密封ステーションを備える、請求項2に記載のシステム。
【請求項4】
前記モジュールはさらに、培養ステーションと、前記試験試料装置が前記担体から自動的に取り除かれ、前記培養ステーション内に挿入される自動装填ステーションとを備える、請求項3に記載のシステム。
【請求項5】
前記担体および試験装置処理サブシステムは、
1)前記真空ステーションから離れた担体装填および脱装填ステーションと、
2)前記担体を前記装填および脱装填ステーションから前記担体および試験装置処理サブシステムを通して運ぶ運搬システムと、
3)前記試験試料装置を密封する密封システムと、
4)前記試験試料装置を培養する培養ステーションと、
5)前記試験試料装置を前記担体から前記培養ステーション内に移動させる自動装填ステーションと、
6)前記試験試料装置を読み取る読取ステーションと、
7)前記試験試料装置の読取の完了後に、前記試験試料装置を受け取る処分システムとを備える、請求項1に記載のシステム。
【請求項6】
a)前記担体、およびb)前記試験試料装置に付けられた機械読取可能な印を読み取る少なくとも一つの読取装置を有する担体読取ステーションをさらに備える、請求項1に記載のシステム。
【請求項7】
前記試験試料装置は、多ウェル試験試料カードを備える、請求項1に記載のシステム。
【請求項8】
前記運搬システムは、前記担体と係合するようになっている担体係合部材を備え、前記運搬システムは、前記担体装填および脱装填ステーション、前記密封ステーション、および前記自動装填ステーションの間で単一の長手軸に沿って前記担体を前後に移動させるように構成および配置されている、請求項5に記載のシステム。
【請求項9】
前記器具を覆い、さらに前記器具の前部を形成する一式のパネルと、
前記システム用ユーザインターフェースと、
前記担体を前記真空ステーション内に装填するようにアクセスを与える第1のドアと、
前記担体を前記担体および試験装置処理サブシステム内に装填するようにアクセスを与える第2のドアと、
前記モジュールによって前記試験装置の処理の完了後に、前記試験装置を受け取る処分システムへのアクセスを与える第3のドアとをさらに備える、請求項1に記載のシステム。
【請求項10】
個別の流体レセプタクルに受け取られる試験試料を受け取るように、複数の試験試料および試験試料装置を処理し、前記複数の流体レセプタクル、および前記複数の試験試料装置を間隔を置いた関係で保持する担体で使用される一体型システムにおいて、前記試験試料装置はそれぞれ、前記試験試料装置と前記担体内に受け取られた前記流体レセプタクルの一つの間を流体連通する運搬管を有するシステムであって、
前記担体を真空ステーション内に手動で挿入し、前記担体を真空ステーションから取り除くようになっていると共に、さらに前記試験試料を前記個別の流体レセプタクルからそれぞれの試験試料装置内に装填するように制御された真空源を備えた真空ステーションと、
前記真空ステーションへのアクセスを与える第1のドアと、
前記試験装置を密封し、前記試験装置を培養し、前記試験装置を読み取る装置を備える、前記真空ステーションから離れた担体および試験装置処理サブシステムと、
前記担体に前記担体および試験装置処理サブシステムへのアクセスを与える第2のドアとを備えるシステム。
【請求項11】
前記担体および試験装置処理サブシステムは、
1)前記担体を前記担体および試験装置処理サブシステムに手動で挿入し、前記担体を前記担体および試験装置処理サブシステムから取り除くようになっている、前記真空ステーションから離れた担体装填および脱装填ステーションと、
2)前記担体を前記装填および脱装填ステーションから前記担体および試験装置処理サブシステムを通して運ぶ運搬サブアセンブリと、
3)前記運搬管を切断し、前記試験試料装置を密封する密封システムと、
4)前記試験試料装置を培養する培養ステーションと、
5)試験試料装置を前記担体から前記培養ステーション内に移動させる自動装填ステーションと、
6)前記試験試料装置を読み取る読取ステーションと、
7)前記試験試料装置の読取の完了後に、前記試験試料装置を受け取る処分システムとを備える、請求項10に記載のシステム。
【請求項12】
前記運搬サブアセンブリは、前記担体と係合するようになっている担体係合部材を備え、前記運搬サブアセンブリは、前記担体装填および脱装填ステーション、前記密封ステーション、および前記自動装填ステーションの間で単一の長手軸に沿って前記担体を前後に移動させるように構成および配置されている、請求項11に記載のシステム。
【請求項13】
前記処分システムへのアクセスを与える第3のドアをさらに備える、請求項10に記載のシステム。
【請求項14】
開口レセプタクル内に入れられた複数の試験試料を試験試料装置で処理する方法において、前記レセプタクルおよび試験試料装置は担体によって担持され、前記試験試料装置はそれぞれ、前記試験試料装置と前記担体内に受け取られた前記流体レセプタクルの一つの間を流体連通させる運搬管を有する方法であって、
チャンバを有する真空ステーション内に前記担体を手動で配置し、前記真空ステーションのチャンバを真空にし、それによって前記試験試料を一括して前記試験試料装置内に運ぶステップと、
前記運搬が完了した後に、前記真空ステーションのチャンバから前記担体を手動で取り除くステップと、
前記真空ステーションから離れた自動担体および試験装置処理サブシステム内に前記担体を手動で配置するステップと、
前記担体および試験装置処理サブシステム内の運搬システムで、自動的にa)前記試験試料装置を密封し、b)前記試験試料装置を培養し、c)前記試験試料装置を読み取るモジュールまで前記担体を自動的に移動させるステップとを含む方法であって、
前記真空ステーションと、前記担体および試験装置処理サブシステムは、単一の試験試料処理器具に一体化される方法。
【請求項15】
前記担体および試験装置処理サブシステムはさらに、
1)前記担体を前記担体および試験装置処理サブシステムに手動で挿入し、前記担体を前記担体および試験装置処理サブシステムから手動で取り除くようになっている担体装填および脱装填ステーションと、
2)前記担体を前記装填および脱装填ステーションから前記担体および試験装置処理サブシステムを通して運ぶ運搬サブアセンブリと、
3)前記試験試料装置を密封する密封システムと、
4)前記試験試料装置を培養する培養ステーションと、
5)試験試料装置を前記担体から前記培養ステーション内に移動させる自動装填ステーションと、
6)前記試験試料装置を読み取る読取ステーションと、
7)前記試験試料装置の読取の完了後に、前記試験試料装置を受け取る処分システムと、
8)バーコード読取ステーションと、
9)担体および試験試料装置検出ステーションとを備える、請求項14に記載の方法。
【請求項16】
前記運搬サブアセンブリは、前記担体と係合するようになっている担体係合部材を備え、前記運搬サブアセンブリは、前記担体装填および脱装填ステーション、前記密封ステーション、および前記自動装填ステーションの間で単一の長手方向に沿って前記担体を前後に移動させるように構成および配置されている、請求項15に記載の方法。
【請求項17】
前記試験試料装置は、多ウェル試験試料カードを備える、請求項14に記載の方法。
【請求項18】
前記培養ステーションの温度を測定し、前記培養ステーションの内側の即時温度を視覚的に示す温度計へのアクセスを与えるカバーパネルを有する培養ステーションをさらに備える、請求項1に記載のシステム。
【請求項19】
前記培養ステーションはさらに、円形コンベヤと、空気がそれを通して前記円形コンベヤに供給される空気分配チャンバとを備え、前記温度計は前記空気分配チャンバの温度をモニターする、請求項18に記載のシステム。
【請求項20】
前記培養ステーションの温度を測定し、前記培養ステーションの内側の即時温度を視覚的に示す温度計へのアクセスを与えるカバーパネルを有する培養ステーションをさらに備える、請求項10に記載のシステム。
【請求項21】
前記培養ステーションはさらに、円形コンベヤと、空気がそれを通して前記円形コンベヤに供給される空気分配チャンバとを備え、前記温度計は前記空気分配チャンバの温度をモニターする、請求項20に記載のシステム。
【請求項22】
器具エンクロージャへのユーザアクセスを制御およびモニターするセンサおよびロックのシステムをさらに備える、請求項1に記載のシステム。
【請求項23】
前記担体および前記試験試料装置上のバーコードを読み取るバーコード読取ステーションをさらに備える、請求項10に記載のシステム。
【請求項24】
前記担体の存在、および前記担体内の前記試験試料装置の存在および位置を判断するセンサステーションをさらに備える、請求項10に記載のシステム。
【請求項25】
バーコード読取ステーションと、前記担体の存在および前記担体内の前記試験試料装置の存在および位置を判断するステーションに前記担体を移動させるステップをさらに含む、請求項14に記載の方法。
【図1】

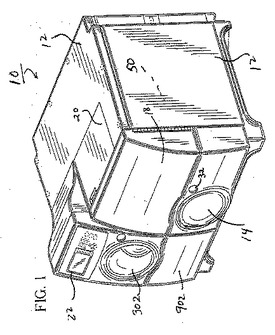
【図2】
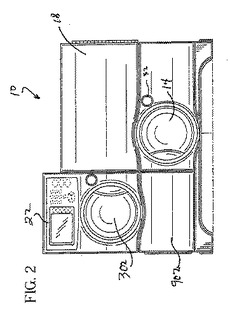
【図3】
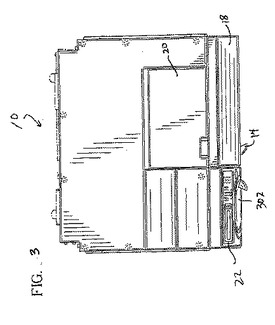
【図3A】
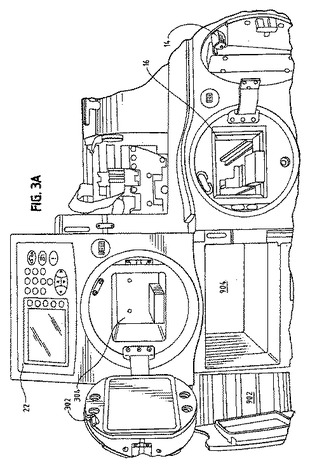
【図3B】
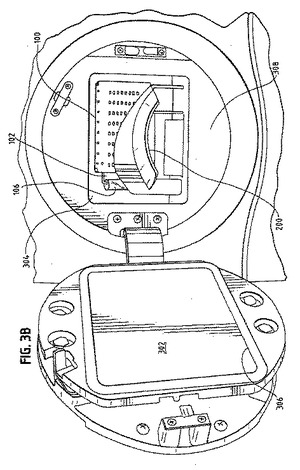
【図4】
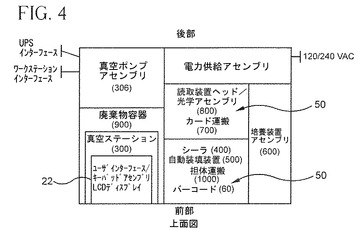
【図5】
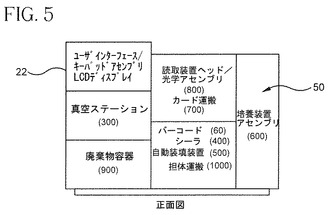
【図6】

【図7】
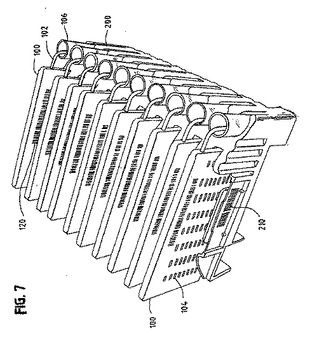
【図8】
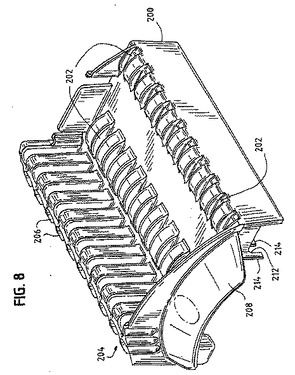
【図9】
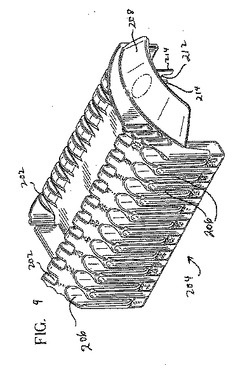
【図10】
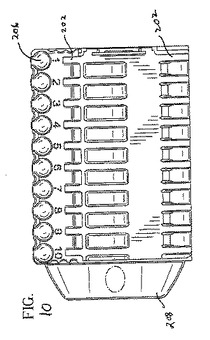
【図11】
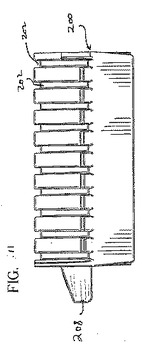
【図12】
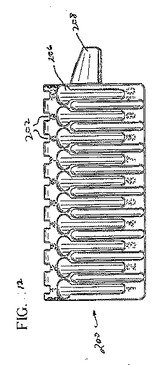
【図13】
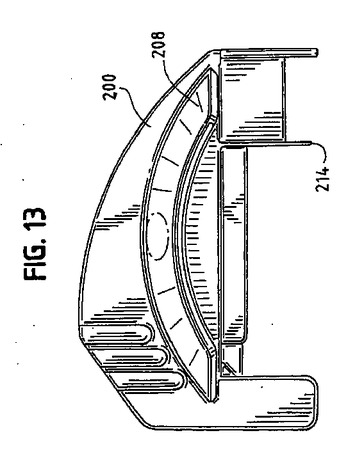
【図14】

【図15】
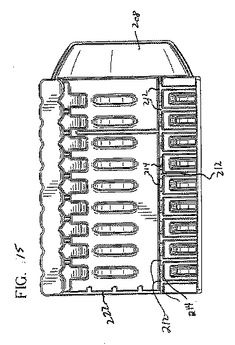
【図16】
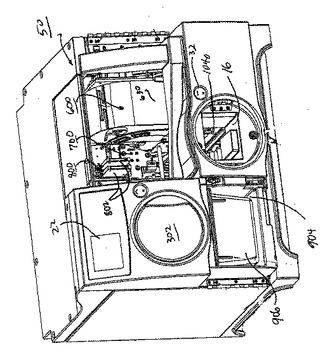
【図17】
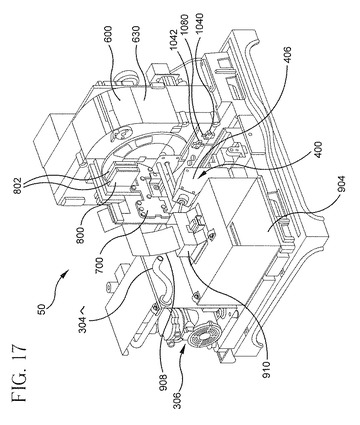
【図18】
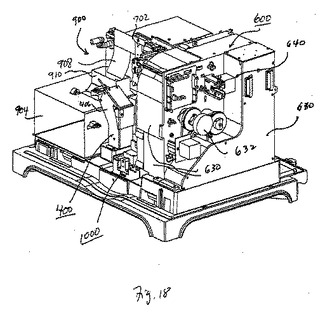
【図19】

【図20】
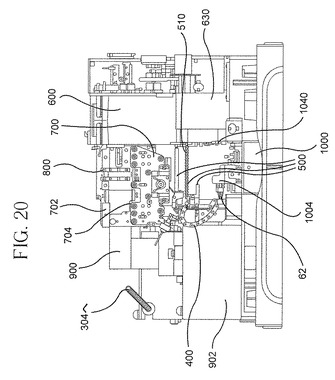
【図21】
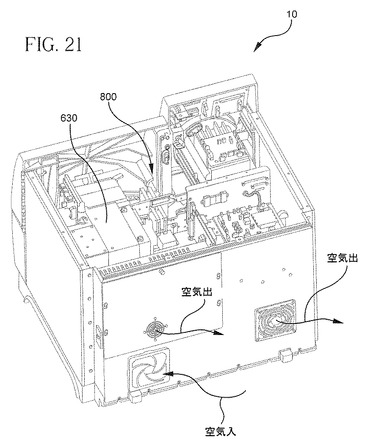
【図22】
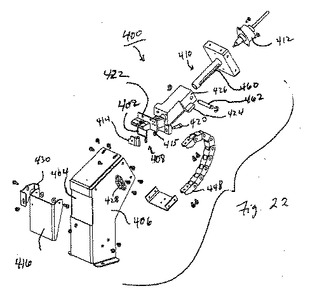
【図23】

【図24】
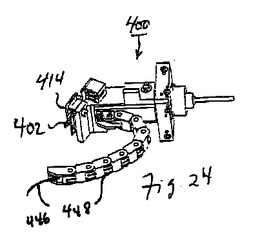
【図25】
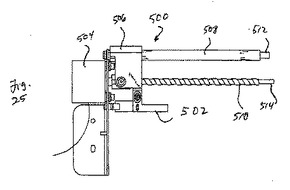
【図26】
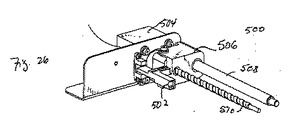
【図27】
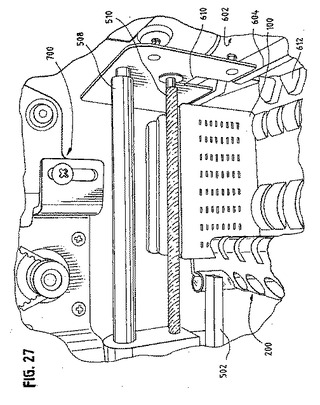
【図28】

【図29】
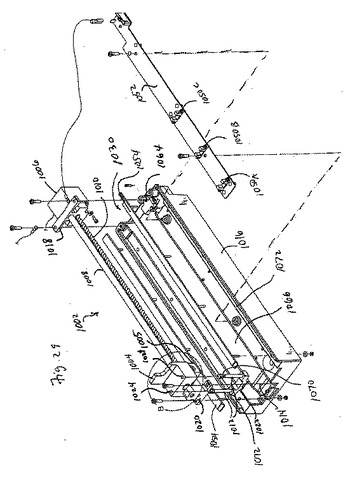
【図30】
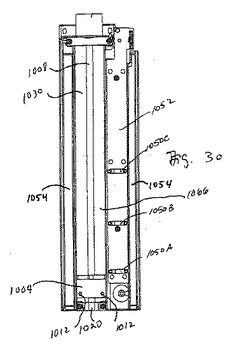
【図31】
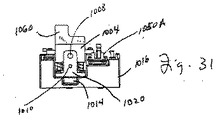
【図32】
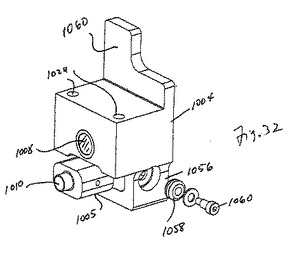
【図33】
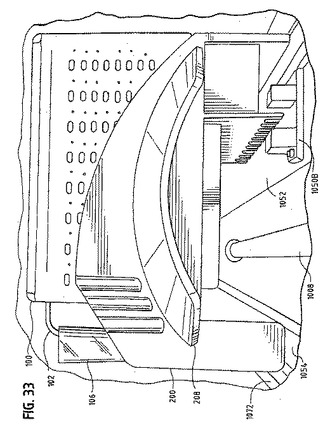
【図34】

【図35】

【図36】

【図37】
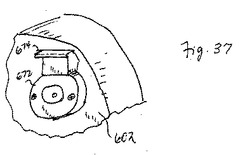
【図38】
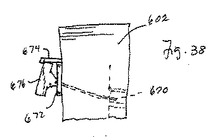
【図2】
【図3】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【公表番号】特表2007−510156(P2007−510156A)
【公表日】平成19年4月19日(2007.4.19)
【国際特許分類】
【出願番号】特願2006−537976(P2006−537976)
【出願日】平成16年8月17日(2004.8.17)
【国際出願番号】PCT/US2004/026719
【国際公開番号】WO2005/045444
【国際公開日】平成17年5月19日(2005.5.19)
【出願人】(502073946)バイオメリュー・インコーポレイテッド (28)
【氏名又は名称原語表記】bioMerieux, Inc.
【Fターム(参考)】
【公表日】平成19年4月19日(2007.4.19)
【国際特許分類】
【出願日】平成16年8月17日(2004.8.17)
【国際出願番号】PCT/US2004/026719
【国際公開番号】WO2005/045444
【国際公開日】平成17年5月19日(2005.5.19)
【出願人】(502073946)バイオメリュー・インコーポレイテッド (28)
【氏名又は名称原語表記】bioMerieux, Inc.
【Fターム(参考)】
[ Back to top ]