
認証システム並びに認証情報登録および照会方法
【課題】対象が持つ一定の固有情報を読み取った画像情報から抽出して、抽出した固有情報に基づいて正当な対象であるか否かを判定すること。
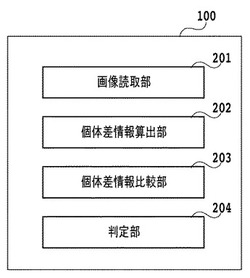
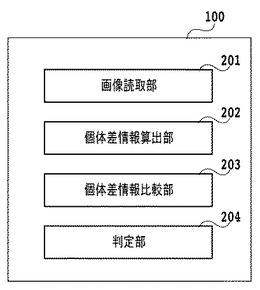
【解決手段】対象をスキャンして画像を抽出する画像読取部201、得られた画像から個体差情報を算出する個体差情報算出部202、算出された個体差情報を比較する個体差情報比較部203および最終的に認証するかしないかを決定する判定部204などにより処理が実行される。
【解決手段】対象をスキャンして画像を抽出する画像読取部201、得られた画像から個体差情報を算出する個体差情報算出部202、算出された個体差情報を比較する個体差情報比較部203および最終的に認証するかしないかを決定する判定部204などにより処理が実行される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、認証システム並びに認証情報登録および照会方法に関し、対象の画像に固有な特徴を画像データから抽出し、抽出した特徴を用いる認証システム並びに認証情報登録および照会方法に関する。
【背景技術】
【0002】
従来から、人間の活動のあらゆる局面で、正当な対象であるか否かを判定する様々な認証技術が用いられており、インターネットや情報の電子化の進展からより高度な認証技術が求められている。古典的な認証技術としては、印鑑や署名など独特の形状を対象に標示させることが行われてきたが、偽造などにより現在ではホログラム、すき入れ(透かし)、潜像模様、パールインキ、マイクロ文字、特殊発光インキ、凹版印刷などの技術を用いて偽造防止を図っている他、電子化の進展にあわせ現在ではパスワードなどの一定の情報を暗号化等して秘密にしておき、そうした秘密情報と照合することにより、偽造防止を図っている。また、指紋など個人の人体に固有な生体情報を予め登録しておき、認証が必要な場合に実際の生体情報を読み取って登録された生体情報と一致するか否かで認証を行う様々な生体認証技術も用いられている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−205393号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記の認証技術のうちパスワードを用いる技術は、予めパスワードを決定し、使用者自体も記憶していなければならいため、情報量が極めて少なく、窃取や偽造が容易であるという問題がある。
【0005】
また、生体情報を用いる技術においては、正当な対象であるか否か判定できるのは人間のみであり、それ以外の物や動植物などには基本的に使用できない。また、近年では生体情報自体を偽造する行為も発生してきており、必ずしも完全に安全な認証技術とは言えないという問題がある。
【0006】
さらに、高度な認証技術の多くは、認証情報を予め対象物に、物理的または電子的に付加させる事が多く、対象物への加工が必要であるため、認証技術の普及を妨げる要因になるという問題がある。
【0007】
本発明は上記従来の問題に鑑みてなされたものであり、認証する対象に加工を必要とせず、対象の個別の特徴を一定の構成を有する標準的なデジタル撮像機器を用いて一定の構成条件で撮影したイメージデータから固有情報を抽出して、抽出した固有情報に基づいて正当な対象であるか否かを判定する認証システム並びに認証情報登録および照会方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1に記載の発明は、デジタル撮像手段の走査により認証対象を解像して得られた複数のデジタルデータの特定された対応位置における光情報差分を算出し、デジタル撮像手段のピクセルサイズに対応する被写体における物理サイズにより算出された対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を、算出された光情報差分の大きい順に連結点として連結して生成される連結線を、対象を一意に特定する個体差情報として、連結線を記憶する記憶手段と、所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、得られた複数のデジタルデータを比較し、それぞれのデジタルデータが認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出手段と、前記算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して対応位置における、記憶手段に記憶された個体差情報の連結線読み出して、読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、連結点の位置が含まれる重ね合わせたピクセルの物理面に対応するピクセルの光情報差分を算出して算出した光情報差分が、連結線の順序に対して、所定の関係にあると判定される場合は認証が成功したと判定する個体差情報抽出判定手段とを備えることを特徴とする。
【0009】
請求項2に記載の発明は、請求項1に記載の認証システムにおいて、デジタル撮像手段の構成条件はデジタル撮像手段の解像度を含み、デジタル撮像手段の解像度は、認証対象の画像を形成する粒子の大きさよりも低い解像度であることを特徴とする。
【0010】
請求項3に記載の発明は、請求項1または2に記載の認証システムにおいて、変換値算出手段は、認証対象を連続して複数回走査することを特徴とする。
【0011】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載の認証システムにおいて、予め設定された情報により、デジタル撮像手段の構成条件の相違によるイメージデータの相違を標準化するための補正を行う補正手段を更に備えたことを特徴とする。
【0012】
請求項5に記載の発明は、請求項1ないし4のいずれかに記載の認証システムにおいて、記憶手段は、連結線の比較のためのパラメータ及び比較方法を含む連結比較設定をさらに記憶し、個体差情報抽出判定手段は、記憶手段に記憶された比較設定を用いて、読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、算出した光情報差分が、連結線の順序に対して比較設定に定められた所定の関係を有している場合は認証が成功したと判定することを特徴とする。
【0013】
請求項6に記載の発明は、請求項1ないし5のいずれかに記載の認証システムにおいて、個体差情報抽出判定手段は、算出した光情報差分が、連結線の順序に対して、所定の数降順である場合は認証が成功したと判定することを特徴とする。
【0014】
請求項7に記載の発明は、認証情報登録方法であって、所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、得られた複数のデジタルデータを比較し、それぞれのデジタルデータが認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出ステップと、算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して特定された対応位置における光情報差分を算出するステップと、デジタル撮像手段の構成条件からデジタルデータのピクセルサイズに対応する被写体における物理サイズを算出し、算出された物理サイズにより、対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を連結点として算出し、算出した光情報差分の大きい順に、任意の回数降順に連結店を連結し連結線を個体差情報として抽出するステップと、抽出された連結線を記憶手段に登録する登録ステップとを備えることを特徴とする。
【0015】
請求項8に記載の発明は、デジタル撮像手段の走査により認証対象を解像して得られた複数のデジタルデータの特定された対応位置における光情報差分を算出し、デジタル撮像手段のピクセルサイズに対応する被写体における物理サイズにより算出された対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を、算出された光情報差分の大きい順に連結点として連結して生成される連結線を、対象を一意に特定する個体差情報として、連結線を記憶する記憶手段を備えた認証システムにおいて、所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、得られた複数のデジタルデータを比較し、それぞれのデジタルデータが認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出ステップと、算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して対応位置における、記憶手段に記憶された個体差情報の連結線読み出して、読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、連結点の位置が含まれる重ね合わせたピクセルの物理面に対応するピクセル光情報差分を算出して算出した光情報差分が、連結線の順序に対して、所定の関係にあると判定される場合は認証が成功したと判定する個体差情報抽出判定ステップとを備えることを特徴とする。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態における認証システムのシステム構成図である。
【図2】本発明の一実施形態の機能ブロック図である。
【図3】本発明の一実施形態の認証処理を示すフローチャートである。
【図4】本発明の原理を説明するための図である。
【図5】本発明の一実施形態の個体差認証形状の抽出処理を説明するための図である。
【図6】本発明の一実施形態の個体差認証形状の抽出処理を説明するための図である。
【図7】本発明の一実施形態の個体差認証形状の抽出処理を説明するための図である。
【図8】本発明の一実施形態の予め抽出された個体差認証形状を用いて行う認証処理を説明するための図である。
【図9】本発明の一実施形態の予め抽出された個体差認証形状を用いて行う認証処理一致判定の一例を説明するための図である。
【図10】本発明の一実施形態の抽出された対象画像の補正処理の一例を説明するための図である。
【図11】本発明の一実施形態の具体的な応用例の抽出処理を説明するための図である。
【図12】本発明の一実施形態の具体的な応用例の一致判定処理を説明するための図である。
【図13】本発明の一実施形態の具体的な別の応用例を説明するための図である。
【図14】本発明の一実施形態の具体的な別の応用例を説明するための図である。
【図15】本発明の一実施形態の具体的な別の応用例を説明するための図である。
【図16】本発明の一実施形態の具体的な別の応用例を説明するための図である。
【図17】本発明の一実施形態の連結イロメガネの例を示す図である。
【図18】本発明の一実施形態のヒトフデガキ線画の連結方式の一例を示す図である。
【図19】本発明の一実施形態のヒトフデガキ線画の連結方式の別の例を示す図である。
【図20】本実施形態の個体差情報を登録する処理を示すフローチャートである。
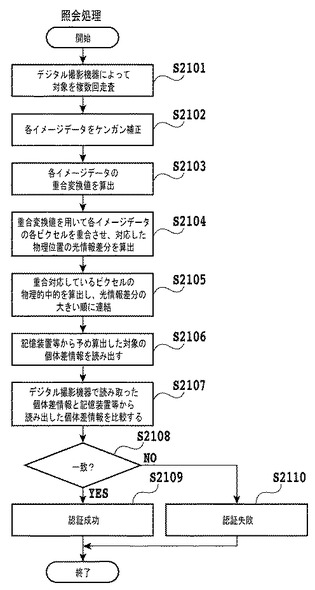
【図21】本実施形態の認証処理を示すフローチャートである。
【図22】本実施形態の光情報差分の算出の詳細を説明するための図である。
【図23】本発明の一実施形態の予め抽出された個体差認証形状を用いて行う認証処理一致判定の一例を説明するための図である。
【発明を実施するための形態】
【0017】
以下本発明の認証システム並びに認証情報登録および照会方法について図面を参照して実施形態を説明する。
【0018】
<個体差認証システム原理>
本実施形態のシステムは、認証する対象に加工を必要とせず対象の個別の特徴を一定の構成を有する標準的なデジタル撮像機器を用いて一定の構成条件で撮影したイメージデータから抽出した対象の固有情報に関する原理、固有情報を読取画像から抽出する固有情報抽出方法および抽出された固有情報に基づいて適宜必要時に対象を認証する個体差認証方法に従って、対象の同一性を判定する。また、対象とは、印刷物、様々な完成品、部品などの物質や人体など、その表面をスキャンあるいは撮像して画像を読取ることができるものであればいずれのものも含むことができる。
【0019】
<個体差に基づく固有情報>
デジタル撮像装置、例えばスキャナやカメラなどによる、現実に存在する物質の走査は、表面の状態を数値化することであるが、対象の物質構成の全てを読取ることはできない。物質の表面の走査とは、一瞬一瞬の物質表面上で起こる現象の写像であるといえる。例えば、光波長(短波長側360nm〜400nmと長波長側760nm〜830nmとの間の可視光領域)内の光に反応する画像素子等の受光部を平面に配列するイメージセンサ(CCD・CMOS)による画像走査(スキャン)では、画像処理や三原色への分光方法および素子構成に相違はあるが、集光した光をRGB他に分光し、各々の受光部の電荷反応を数値化して、数値を順に並べ、配列データとして出力するカラー撮像プロセス(数値画像化プロセス)によりデジタル再現された、現象の写像が行われる。それら光の写像情報はXYZの配列に対応した解像度の尺度に置き換えられた数値ということになる。さらに、イメージセンサにおいては、解像度が高い、すなわちセンサを構成する各受光部が光の波長の長さより小さければ光として観察は不可能であり、大きければ逆にその各受光部による物質自体の個々の観察も不可能となる。加えて、自然物質は、ランダムに配置されているため、受光部が配列で構成されるイメージセンサでは自然物そのものを再現することは不可能である。
【0020】
これが分解能であり、イメージセンサの走査単位である素子のサイズに応じて受光した光に反応し、この反応を数値化して配列、つまりイメージセンサに所定の形態で配置された素子に各々受光した光に応じて発生した電気量を配列したものがイメージデータである。従って、この数値化も、結局1つの走査単位に対応する対象の部分内の現象を数値化して色圧縮処理したものであり、これを配列したイメージデータは、走査単位のサイズに応じて解像された現象ということができる。すなわち、スキャンされたイメージデータは解像度などの構成条件に応じて変化するが、本実施形態ではこの現象に着目し対象の固有な情報を抽出する。ここで、構成条件とは、撮像素子の物理的位置、種類、サイズ、解像度、レンズ構成、レンズ倍率、LEDなど照明機器の物理的位置、輝度、周波数特性、色温度、認証対象との被写体間距離、フォーカス位置、焦点距離、シャッタースピード、フレームレート、認証対象とレンズ、および撮像素子で構成される光学系の相対位置関係などのパラメータにより構成される撮像機器構成と撮影条件とである。
【0021】
実際に正当性を判定することとなる対象は、自然物質で構成されているため、その最小サイズは、ナノ・マイクロサイズよりさらに小さい「粒子」である。光子はそれより大きく、さらに可視光では、波長は短波長側360nm〜400nmと長波長側760nm〜830nmとの間の可視光領域内とされているため、このサイズより小さい単位の物質は単体では光(可視光)を反射しない。したがって、センサによる数値化によっても、解像度よりもはるかに微細な自然物質自体の現象は解読できないが、読取結果、すなわちセンサにより出力された値はサイズ内の現象に左右される。すなわち、少し(マイクロオーダ)でも走査位置がずれる、すなわち同一の対象を複数回読み取った場合に得られたイメージデータのデータ配列のうち対応する位置と、その読取った素子の相対位置とが僅かにずれると、その対応するイメージセンサの素子で読取られる光情報の数値は影響を受け、よって同一の対象を同一の条件で走査しても同じ走査情報が得られないこととなる。これは、光の波長サイズより小さい解像度を持つイメージセンサが存在しない限り必ず起こり、この読取結果の差異を本願では解像差と呼ぶ。このような解像差を具体的なCCDセンサを用いて説明したのが図4である。ここで、図4に示す例は、本原理を適用する一例に過ぎず、本発明はこの例に具体的に示されたいずれの技術によっても限定されるものではない。
【0022】
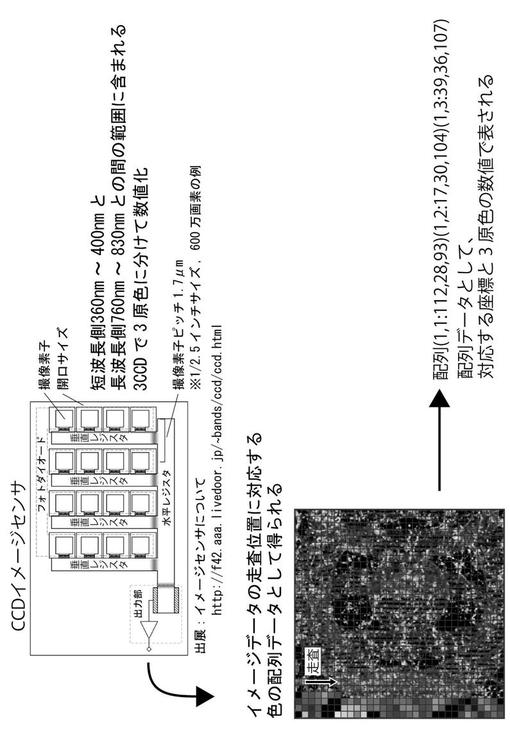
図4を参照すると、一般に認証対象を読み取るスキャナで使用される、例えばCCDセンサでは、図に示すように一定の間隔をもって配列された撮像素子により、RGB 等に分光され、撮像素子の開口部から入る波長(短波長側360nm〜400nmと長波長側760nm〜830nmとの間の可視光領域)の可視光が電荷に変換され蓄積される。この蓄積された電荷を光の強弱として、デジタル化し、デジタル化されたRGB 等の数値により、撮影対象は、撮像素子のピッチと開口部によって制限される入射光が、1素子に対して1色に色圧縮され、色の配列データとして表現される。このようにして得られる色の配列データは、撮像素子の位置を表す座標とRGB 等の表色系のそれぞれの成分を表す数値データとして表現される。例えば、(X座標,Y座標:R,G,B)とすると、図に示すように(1,1: 112, 28, 93)、(1,2: 17, 30,104)、(1,3: 39, 36,107)・・・といったデータが得られるが、これらの値は、スキャナで読み取られるたびに走査位置がマイクロオーダで変化するため異なる値となる。
【0023】
この解像差は、ナノ・マイクロサイズで印刷されている印刷物においても同様に発生する。印刷物のような複製品(量産品)において、走査して得られた画像は、実際の現象から現実的に観察できないナノ・マイクロレベルの印刷誤差・紙面の違いが影響している。つまり、この解像差には、意図せず作られた、または意図しても同一物を量産製造不可能なナノサイズの粒子による個体の特徴が反映されるのである。この個体の特徴に起因して発生する、対象読み取り時の解像差による差異を、本願では「個体差」と呼ぶ。
【0024】
<対象に固有な情報の抽出>
本発明では、この個体差を、これには限られないが印刷物等の対象から取得し、取得した個体差から1つの対象に対し一意な情報を抽出して認証処理に使用する。そのような対象に固有な情報の抽出法の1つを説明する。上述したように、走査毎に出力されるイメージデータは、解像の再現を不安定にしており、ここに個体差が反映されている。しかし、単純に解像した結果得られた値自体は通常は一定ではないことから、そのままでは対象を一意に表す情報として使用することは出来ない。そこで、個体差から一定の関係性を得られる情報を抽出する。すなわち、得られた読み取りデータを、各読み取りデータの対応する位置毎に比較してその変化が大きい順番に並べ、その相対位置関係を3次元座標に置き換えて順に連結し、一定の折れ線の形状、すなわち個体差により同一の解像を妨げる要素である「不安定再現要素点」が不安定再現強度順に並んだ「線」を生成する。この「線」は、先に述べたようにスキャナのセンサの解像度にかかわらず、対象を画像として読み取れば必ず生成することができ、この「線」を生成する順序には、対象に固有な情報の一意性に基づく一定の普遍性が現れる。
【0025】
このような線は、その生成順位が不安定再現を起こす順位のため、具体的には同一の対象を最低2回走査してその差の順位を特定することによって求めることができる。本発明の基本的な原理は、同一の対象でも走査するたびに物理的(光の波長・物性)な条件により同じ結果は得られないため、単に得られた個体差の比較では類の識別は可能であっても個の識別は印刷物のような量産品においては困難であるという課題に対して、個体差自体の比較ではなく、読取られる配列毎の解像再現性の不安定さの順位関係を観察して個の識別を可能にするという、より具体的な手法によって実現可能となる。これは、物理的に対象が存在することと、これもまた物理的にイメージセンサの配列関係が存在するという事実とから得られる。すなわち、イメージセンサの配列は、物理的に一定であるため、走査毎の走査位置のずれが生じてもイメージセンサ内部構成の崩れる可能性は、少なくとも走査位置のずれの発生の可能性よりは低いため、その配列は構成状態を保っていると考えていい。従って、走査領域のイメージデータ(配列値)から得られた「線」において、その位置関係は保持される。すなわち、イメージセンサの対応する各素子について値は走査毎に変化するが、その差異の順位は保持されるということである。また、例えば異なる印刷物の対象において、この「線」形状を順に走査しても一致する確率は低く、「不安定再現要素点」の個数によって後述するような確率のものとなり、認証判定が十分に可能なものである。この「線」は、不安定解像、すなわちイメージデータの対応する各素子で得られる値の不安定さを再現することから、不安定再現を起こす順位でもある。ここで、この「線」は不安定さの再現性の程度を表現できれば良いことから、結局同じ対象を連続して最低2回走査してその差の順位によって求める事ができる。すなわち、例えば連続して2回走査して得られたイメージデータは、その走査の解像レベルよりも小さい対象の(微細な)特徴により僅かに異なるものとなり、その差異を例えば順位という概念で処理することにより、その対象の微細な特徴を把握することができるのである。ここで、2回の走査は通常連続して、つまり一定の時間内で行うが、これは時間間隔を開けすぎると対象内で起こる現象が大きく変化してしまい、上述のような原理が働かなくなる可能性があるからである。例えば、1回目の撮影後撮像機器の電源を落とした場合など、イメージセンサ内の電荷量、光量に対する感度などの非可逆性等により撮像条件が大きく変化してしまい、調整するのが困難になる可能性がる。したがって、複数回の撮影は一定の近接した時間内で行ったり、ほぼ同様の撮影条件が保たれていたりする状態で引き続き撮影されるのが好ましい。このようにして本発明の原理に従えば、何ら新しい機器を必要とせず1回の解像処理では捉えきれない現象を複数のイメージデータから推定することで、イメージセンサの分解能を超えた対象の現象を獲得することができることとなる。
【0026】
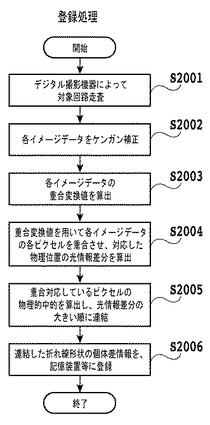
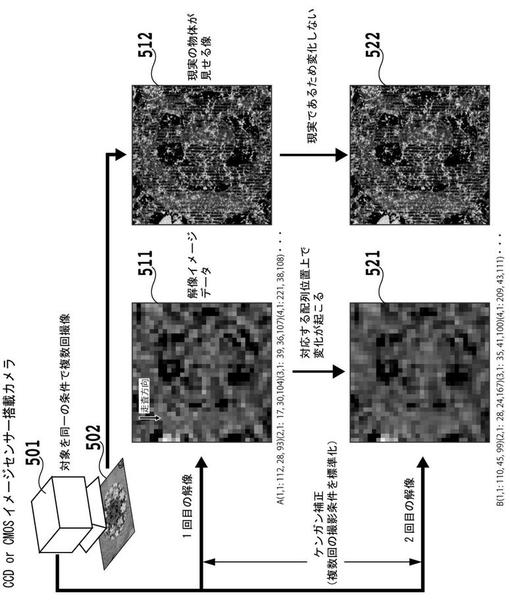
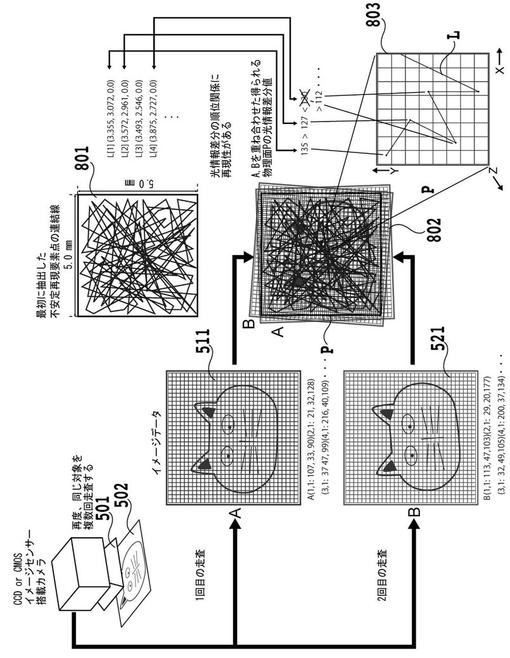
以上のような原理を適用し、以下に対象に固有な情報の抽出処理の1つを説明する。図5を参照すると、図4を参照して説明したように、CCD やCMOS イメージセンサを搭載するカメラ501で対象502を、同一の構成条件で連続して複数回走査しデジタルデータとして解像する。図20は、本実施形態の個体差情報を登録する処理を示すフローチャートである。
【0027】
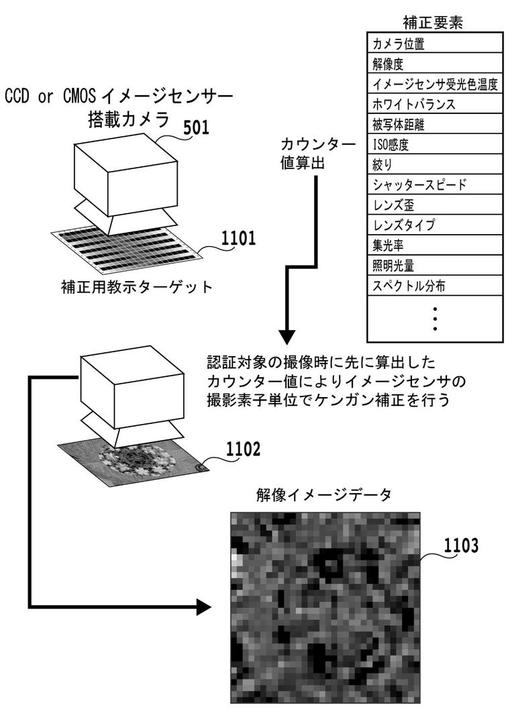
認証時には異なる撮像機器を使用することも考えられるため、予め標準的な教示データを用いて個体差情報を算出するために使用する撮像機器等の位置補正、解像度、センサ受光色温度補正、ホワイトバランス補正、ISO感度補正、レンズの歪補正、色収差補正、集光補正、照明の光量補正、スペクトル補正、撮像機器のタイプによる変換など、解像を標準化する、すなわちケンガン補正するための補正値を取得しておき、この補正値を適用するために構成されたフィルタを解像されたイメージデータに適用する。これにより、イメージデータの各ピクセル値を変換し、撮像機器構成などによらず一定の条件でイメージデータの読み取りを可能とするが、これに限られることなく記憶装置に記憶するなど別途補正値データをやり取りし、あるいはその他本技術分野で知られた方法によりイメージデータを生成することができる。例えば、登録時と認証時とで異なる解像度の撮像機器を使用した場合でも、予め解像度を記録しておいて、低い解像度のイメージデータの解像度を高くしたり(数値自体は変わらずデータ量が解像度が高くなる分増加する)、低くしたりして同じ解像度に換算して処理することができる。
【0028】
現実の物体の像512、522は1回目も2回目も同一であるが、1回目に解像されたイメージデータ511と、2回目に解像されたイメージデータ521とを比較すると、スキャナの微細な走査位置の相違などにより、解像された配列データは異なるものになっていることが理解される。具体的には、1回目の読み取り時のイメージデータ511の配列である(1,1: 112, 28, 93)(2,1: 17, 30,104)(3,1: 39, 36,107)(4,1: 221, 38,108)・・・に対し、2回目のイメージデータ521の配列は、(1,1: 110, 45, 99)(2,1: 28, 24,167)(3,1: 35, 41,100)(4,1: 209, 43,111)・・・と少し異なるものとなっている。
【0029】
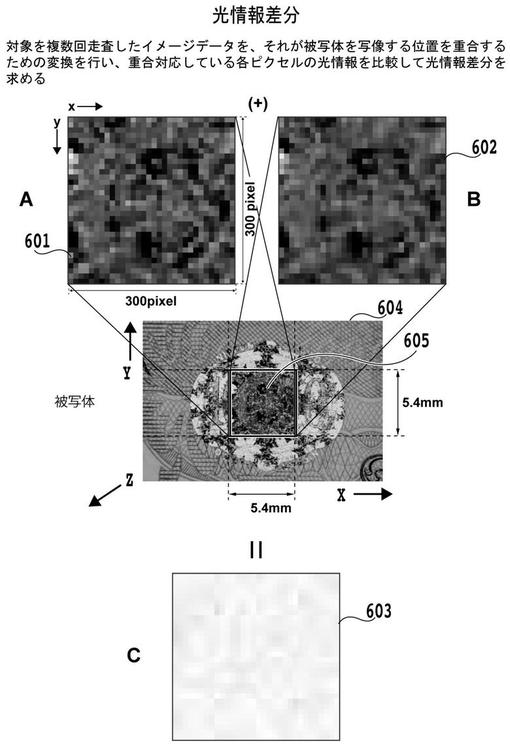
次に、以上のように複数回読み込むことにより得られた複数のイメージデータから解像差を抽出する。具体的には、図6に示すように、複数、ここでは2つのイメージデータ601及び602からその差分画像603を抽出し、複数回解像した場合に起こる解像差を光情報差分として顕在化した個体差を捉える。実際に解像差を算出する場合は、異なる点同士を比較しても意味がないから、それぞれのイメージデータが被写体同じ部分を写像する位置が重ね合わせるための移動と回転の変換値を算出する。イメージデータに算出された各々の変換値を用いて、各イメージデータのピクセル配列を重ね合わせ、重ね合わさる位置のピクセルの光情報を比較して光情報差分を算出する。この位置の重ね合わせのための変換値の算出には本技術分野で知られたいずれの方法も用いることができる。
【0030】
例えば、このような変換値は、各々のイメージデータから特徴的な点を何点か抽出し、それらの特徴点が一致するようにアフィン変換する等して算出することができるが、これに限られない。なお、本実施形態では、複数のイメージデータ同士を比較するために、相互に対応する点を特定し、それらの点が重ね合わさるようにするためにイメージデータをどのように平行等の移動や、回転を施す必要があるかを示す変換値を求め、実際にイメージデータを変化して重ね合わせてしまわずに、変換値を用いて対応する点を特定して、その対応する位置にあるピクセルの光情報の差分を取るが、これは、実際に変換処理をしてイメージデータを重ね合わせると、微妙なズレが生じる可能性があるからである。したがって、このようなズレを回避することができれば、実際にイメージデータに変換処理をしてから差分を取って、以上の処理を行うこともできる。
【0031】
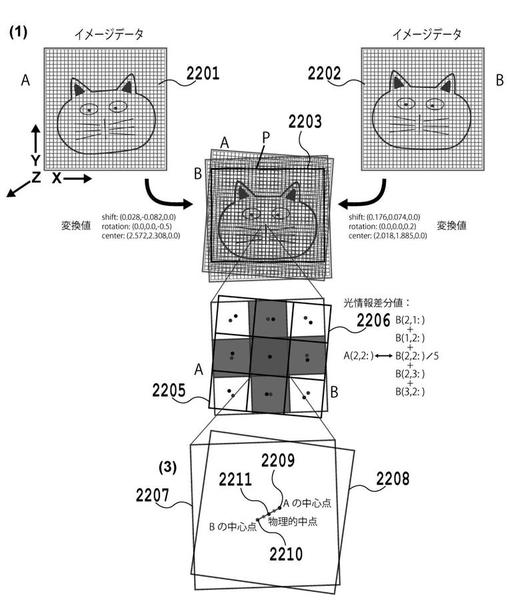
図22は、本実施形態の光情報差分の算出の詳細な一例を説明するための図である。上述の通り、本実施形態では、対象を複数回走査したイメージデータを、それが被写体を写像する位置を重ね合わせるための変換を行い、相互に対応している各ピクセルの光情報を比較して光情報差分を求めるが、具体的には、図22に示すような処理により実行することができる。まず、各イメージデータA2201、イメージデータB2202に対して被写体を写像する位置が重ね合わさるように変換値を求める。次に、各イメージデータA、Bを変換した結果、対応するピクセルの光情報(この例では、RBG成分)を比較し、その差を対応する物理位置の光情報差分とする。より具体的には、図22に示すように仮想的なイメージデータP2203を形成し(したがって、イメージデータPは、イメージデータA、Bよりも小さなサイズとなる)、イメージデータP2203の各点からイメージデータA、Bの対応する点を求める。イメージデータの拡大図A2205及びB2206に示すように、重ね合わせをしてもピルセルレベルでは、イメージデータAとBとは完全に一致することはなく、イメージデータA2205のあるピクセルは、イメージデータB2206の複数のピクセルと重なる。
【0032】
したがって、本実施形態では、例えば、光情報差分をとるため、1つのピクセルの光情報の値と、そのピクセルと重なる複数のピクセルの光情報の値との差分を取ることにより、光情報差分を算出するが、これに限られず本技術分野で知られたいずれの方法で算出することもできる。この場合、後述する連結点は、1つのピクセルの中心点2209と、対応する複数のピクセルの中心点の中心2210との中点2211とすることができる。この結果、得られた光情報差分をイメージとして色表現したものである。ただし、実際にはこのような中間過程は存在せず、光情報差分のデータより直接ヒトフデガキ線画が求められる。この各成分値を総和したものがイメージデータA、Bに対する光情報差分となる。
【0033】
このようにして、解像差は、対応するイメージの重なり合う位置における位相差として、例えば、図6に示すように各重なりあう位置におけるRGB各成分毎の差の絶対値の総和で表すことができる。ここで、2つのイメージデータ601、602の差分を取るにあたり、上述の通り各イメージデータのピクセルの重なり合う位置の特定をする必要があるために、予め各々のイメージデータの各特徴点などからそれぞれ対応する重なり合う位置を特定、すなわち被写体の同じ部分の光情報を比較できるように対応位置を特定している。このような重ね合わせの結果、A,B のイメージデータ601,602の物理対応位置に相当する各ピクセル値をRGB 成分毎に比較し、その差分を光情報差分として色表現したものが光情報差分C となる。すなわち、イメージデータ601の配列A(1,1: 112, 28, 93)(2,1: 17, 30,104)(3,1: 39, 36,107)(4,1: 221, 38,108)・・・およびB(1,1: 110, 45, 99)(2,1: 28, 24,167)(3,1: 35, 41,100)(4,1: 209, 43,111)・・・を実際の距離に換算し、A’(0.009,5.391,0.0: 112, 28, 93)(0.027,5.391,0.0: 17, 30,104)(0.045,5.391,0.0: 39, 36,107)(0.063,5.391,0.0: 221, 38,108)・・・(座標の単位はμm)およびB’(0.011,5.392,0.0: 110, 45, 99)(0.031,5.392,0.0: 28, 24,167)(0.048,5.392,0.0: 35, 41,100)(0.066,5.392,0.0: 209, 43,111)・・・とすると、A’(+)B’= CB’(0.011,5.392,0.0: 110, 45, 99)(0.031,5.392,0.0: 28, 24,167)(0.048,5.392,0.0: 35, 41,100)(0.066,5.392,0.0: 209, 43,111)・・・となる。
【0034】
以上のようにして得られた解像差は、対象に固有な特徴が反映されることから対象に一意な属性を有し、同一対象に対しさらに複数回読取って抽出して得られた結果同士に一定の相関関係が存在することとなる。この関係をより明確にする、すなわち対象の認証を可能にするため、得られた解像差から不安定再現要素点の連結を行う。換言すると、解像差から不安定再現要素点を不安定再現強度、つまり上述の例の各重ね合わせの位置の中点を光情報差分値の大きい順に並べると、この順位は撮影対象の解像処理に対して再現性、つまり同一の対象について一定の相関関係を持つ。不安定再現強度の数値、すなわち各イメージデータの光情報差分自体は、解像時の誤差の影響を個体差以上に受けるため、対象に固有な情報としては適さない。したがって、不安定再現強度の数値自体は無視して、位置情報のみを保持して並べ替えた順番でこの点を順に連結する。位置情報は、登録時と認証時の撮像機器構成が異なることにより被写体とイメージデータの大きさの比率が変化した場合などに対応するため、重なり合うピクセルの位置から、撮像機器構成である、撮像素子サイズ、レンズ構成、被写体間距離などの光学系の構成情報を用いて、イメージデータのピクセルサイズが対応する被写体の物理サイズ算出し、これにより重なり合うピクセルの中心点の物理写像位置の中点を求めて使用する。
【0035】
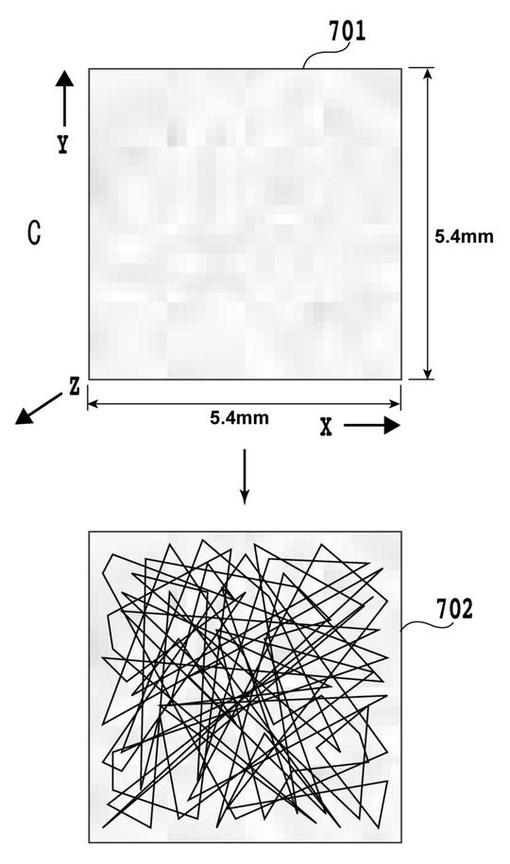
具体的には、図7に示すように、図6において光情報差分を求めるために重ね合わせを行った各イメージデータの変換値から、重なり合うピクセル位置をピクセル中心点に写像される被写体の物理位置(3次元位置)に変換し、その中点を個体差を表す折れ線形状の連結線を構成する各連結点の位置情報として採用する。光情報差分701D(25) (80) (16) (20)・・・を、光情報差分の値の順に並べ替え、その先頭から差分値の計算に使用した2つのイメージデータの対応するピクセルの中心位置に写像される被写体の物理位置A’(3.353, 0.072, 0.0) (1.771, 0.960, 0.0) (5.295, 5.245, 0.0) (4.276, 0.928, 0.0)・・・、B’(3.357, 0.072, 0.0) (1.773, 0.963, 0.0) (5.292, 5.247, 0.0) (4.275, 0.927, 0.0)・・・を求める。その中点(X,Y,Z軸の平均位置)の位置情報をL (3.355, 0.072, 0.0) (1.772, 0.9615, 0.0) (5.2935, 5.246, 0.0) (4.2755, 0.9275, 0.0)・・・とし、画像702に示すように走査領域のイメージデータから得られた個体差を表す連結線を生成する。ここで、このような連結線あるいは連結線を示す画像をヒトフデガキ線画と呼ぶ。得られたヒトフデガキ線画は、後述するように1回の解像処理では得られない、再現性がある順位を持つものであり対象に固有な特徴を表している。
【0036】
以上の処理により、対象の走査により得られたデータの個体差から抽出される個体差情報である、不安定再現要素点の連結データを得ることができ、本実施形態では、この個体差情報を用いて対象の同一性に関する認証を行うが、以上説明した個体差情報、及び抽出方法は、本発明の一手法に過ぎず、対象を画像として読取った結果得られるデータの解像差に反映される対象に固有な情報を示すいずれかの情報を個体差情報として、本技術分野で知られたいずれかの方法により抽出することにより本発明で用いることができる。また、上述の説明ではRGBの各成分の値を用いたが、本発明の原理から理解できるように対象の表面の状態を一定の解像度で光学的に走査して得られる、各走査単位における光の強度のデータの配列であればいずれのデータも用いることができる。
【0037】
<対象の認証処理>
以下、図8、10及び23を参照して、上記で得られた個体差情報から対象を認証する、つまり印刷物などの対象を、既に個体差情報を抽出した対象と同一か否かを、個体差情報を用いて判定する一手法を説明する。まず、その前提として、図8を参照し、不安定再現要素点の順位関係の再現性、つまり光情報差分の強度の高い順に並べた連結点の位置情報が、同一の対象についてのものの場合、一定の類似性を有することを説明する。図21は、本実施形態の認証処理を示すフローチャートである。
【0038】
図8に示すように、対象502は予め複数回スキャナ等で読取られたイメージデータから、画像801に示す連結線で表されるような個体差情報が抽出され、データベース等の何らかの記憶手段に記憶されている。ここで、対象502をさらにカメラ501で複数回走査し、画像802に示すように、予め抽出した画像801に示すヒトフデガキ線画に従って、ヒトフデガキ線画の連結位置が重ね合わせたピクセルと対応する位置の光情報差分を求め、具体的には連結の順番に従って連結位置を比較する。この比較の結果、このヒトフデガキ線画は、解像差に個体差が反映されることから、図8に示すように全く同一にはならないものの、例えば画像801に示すヒトフデガキ線画上の点と、画像802の点とで、不安定再現要素点の順位に一定の再現性を持ち、ヒトフデガキ線画803を得ることができる。このため、同一の対象について得られたヒトフデガキ線画同士では、対応する連結位置の連結順位に再現性が存在することとなるので、順位が一致する程度により同一性を判定することができる。
【0039】
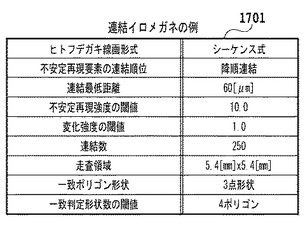
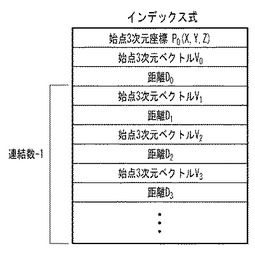
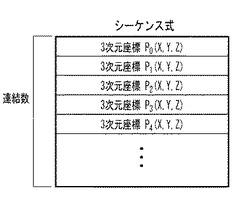
ここで、本実施形態では光情報差分の強度の高い順に並べた連結点の位置を比較することにより対象の一致を判定しているが、ヒトフデガキ線画の比較の方法としては、これに限られず不安定再現要素強度の低い順に連結し、比較するなど、種々のパターンの比較方法、つまり連結比較法のバリエーションが考えられる。本発明を用いる場合は、撮像対象に最適なパラメータおよび比較方法を用いることで、認証対象の限定などが可能となるので、このようなパラメータおよび比較方法をあわせて、連結イロメガネあるいは連結比較設定と呼ぶ。連結イロメガネは、下記のように様々なパラメータを使用し、この組み合わせにより、ヒトフデガキ線画の連結方式が決められる。連結イロメガネの例を図17に示す。また、図18及び図19にヒトフデガキ線画の連結方式を示す。図18が、インデックス式を示しており、図19はシーケンス方式を示している。連結イロメガネで使用するパラメータ:((不安定再現要素強度の順位(正逆))(連結最低距離)(強度の閾値)(変化強度)(連結数)(走査領域)+α)である。
【0040】
また、これに対応するヒトフデガキ線画の形式の例を以下に示す。
「ヒトフデガキ線画」インデックス式:
((始点3次元座標XYZ)(始点3次元座ベクトル)(距離))+個数×((3次元ベクトル)(距離))
「ヒトフデガキ線画」シーケンス式:個数×3次元座標XYZ
すなわち、下記で詳述する降順の他に昇順、連結最低距離に満たない不安定再現要素点はスキップする、強度閾値以下の不安定再現要素点は連結しない、強度変化が一定以下の点はスキップする、連結数の最大値まで連結する、定義領域の範囲内のみ連結するなど種々の比較方法が可能である。なお、連結イロメガネは、対象が現れている素材自体や、対象の表現方法、すなわちどのようなインクを使用したどのような印刷方法かなどにより最適なものを選択することができ、実際の認証処理においては、予めどのような連結イロメガネを使用するかを定めておく必要がある。このため、上述の個体差情報を記憶しておくデータベース等には個体差情報に加え、どのような連結イロメガネを使用するのかをともに、あるいは一定の手法により関連付けて付随情報として記憶しておくことにより、最適な条件で個体差情報を使用して認証処理をすることができる。この付随情報には連結イロメガネのほかに、個体差情報を使用して対象の同一性を判定するために有効な、その他の情報も含めることができる。
【0041】
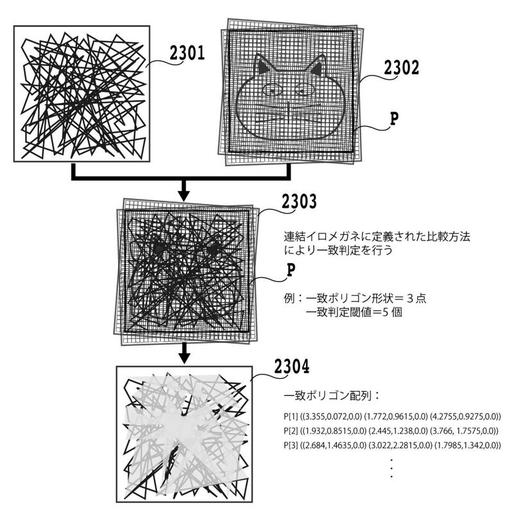
次に、具体的に同一性を判定、すなわち不安定再現要素点の順位の再現性を判定する手法を説明する。具体的な処理例として図23を参照して説明すると、認証対象の一致判定は、まず、最初に抽出され登録されたヒトフデガキ線画2301を連結順位に辿ることで、各連結位置が認証時に読み取り重ね合わせたイメージデータ2302のピクセルの物理面と対応するピクセルの光情報差分の値が所定の関係であるかどうかを見ることにより行う。ここで、一致判定は、連結イロメガネで定義された比較方法に従って行われる。例えば、一致ポリゴン形状が3点形状の場合は、ヒトフデガキ線画の連結の先頭から3点ずつ対応する順位関係が成立しているかを判定し、3点の対応関係が成立した場合、一致形状として一致ポリゴンをカウントする。次に、順に対応関係を判定していき、ヒトフデガキ線画の終点まで検索する。この結果、一致ポリゴン配列に一致形状が格納され、一致形状の個数が一致判定閾値以上の場合、認証成功と判定する。もちろん、所定のカウント数まで一致ポリゴンを探索し、そのカウント数を越えた時点で認証が成功したとして処理を終了させることもできる。
【0042】
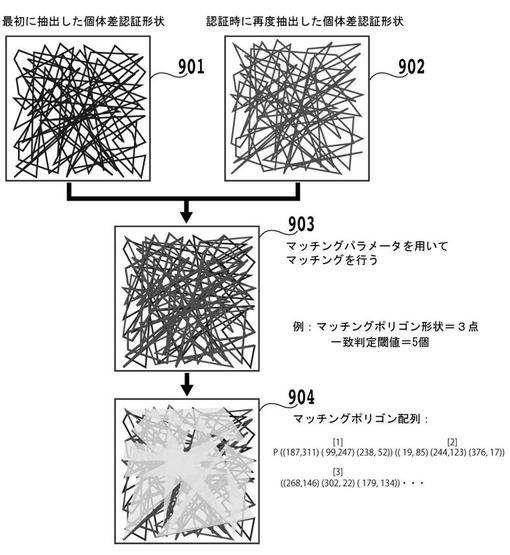
本実施形態では、認証時に連結線を生成せずに、登録された連結線に沿って認証時に走査したイメージデータをたどり一致順位の数をカウントしたが、認証時にも連結線を生成して、連結線同士を同様に比較して同一性を判定することもできる。具体的に図9を参照して、ポリゴンによるマッチングを説明する。すなわち、ヒトフデガキ線画を比較する1つの手法として、ヒトフデガキ線画の始点から順に3点ずつ対応関係をとり3点が一致した場合一致ポリゴンが存在すると係数することにより同一性の判定を行う。ポリゴンによるマッチングも、最初に抽出され登録された個体差情報の画像901に示すヒトフデガキ線画と、認証時に再度抽出した個体差情報の画像902に示すヒトフデガキ線画とを比較することで行う。2つのヒトフデガキ線画は、上述の連結の順位などのいずれかの連結イロメガネに従って比較され、一致判定され、連続する3点から三角形が形成される(一致ポリゴン形状が存在する)ので、マッチング画像903に示すようにヒトフデガキ線画の先頭から3点ずつ対応する順位関係が成立しているかを判定し、3点の対応関係が成立した場合、一致するポリゴンをカウントする。このように順に対応関係を判定していき、ヒトフデガキ線画の終点まで検索する。この結果、一致ポリゴン配列904に一致形状が格納され、一致形状の個数が一致判定閾値以上の場合、認証成功と判定する。
【0043】
<認証一致確率について>
デジタル撮影機器の解像度で解像される認証対象の物理サイズとフォーカスによって集光されるイメージデータのサイズ(ピクセルサイズ)に対応して、不安定(解像)再現強度点を重複せずに単純に強度順に全てのピクセルをつないだ場合に一致する確率が、点数を減らした場合どのように変化するかを以下に説明する。ここで、読み取られるイメージデータの枚数は2枚とし、解像度は同じものとする。
【0044】
上記の認証方法に基づき、最終的に、ヒトフデガキ線画は座標位置だけの相対関係のデータとなり、このヒトフデガキ線画が偶然に一致する確率は、以下に述べる式で表わされる。トリミング後の画像のx,y,z方向のサイズを、Xt, Yt, Ztとすると、不安定再現要素点の不安定性は一様であるとした場合、各要素点の自由度は、Xt×Yt×Ztとなり、不安定再現要素点の総数をNとすると、イメージデータ上の任意の1点が不安定再現要素点である確率は、
【0045】
【数1】

【0046】
となる。ヒトフデガキ線画のマッチングを行った場合に、この1点が一致する確率は、登録時の画像のサイズを、Xr, Yr, Zrとすると、ピクセルに対応する物理位置が別のイメージデータの対応ピクセルの領域に入る場合と捉えると、
【0047】
【数2】
【0048】
となり、一致ポリゴン形状を3点形状とした場合、最初の3点が全て一致する確率は、
【0049】
【数3】
【0050】
となる。これを2番目以降の3点についても適用すると、一致形状数がPの場合の認証一致確率Rは、
【0051】
【数4】
【0052】
また、ヒトフデガキ線画として連結する不安定再現要素点の数Nを、イメージデータの全ピクセルとした場合は、
【0053】
【数5】
【0054】
となり、連結数を減らしていくに従って、偶然に一致する確率は高くなることが分かる。逆に、認証判定の精度を上げるためには、一定以上の連結数の一致を条件とする必要がある。また、連続して一致するマッチング形状を3点から増やすと[数5]に示した{}内の乗算の数が増えることから偶然に一致する確率は低くなり、こうすることでも、認証精度を高めることが可能である。さらに自明であるが、[数3]において、最初の1番目および3番目の点のみ一致する確率は、
【0055】
【数6】
【0056】
となり、偶然に一致する確率が高くなることが分かる。
【0057】
上記で図9を参照して説明した例では、一致ポリゴン3点形状として、一致ポリゴン数5個を閾値として、これ以上の一致がなければ認証が失敗したと判定している。なお、この閾値は認証対象の特性、すなわちどのような素材にどのような方法で印刷したのか等により最適な値を決定することができる。
【0058】
<実施例>
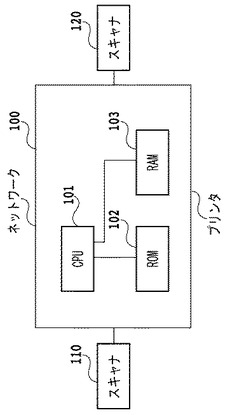
図1は、本発明の一実施形態における認証システムのシステム構成図である。本実施形態の認証システム100は、CPU101、ROM102、RAM103や各種外部とのインタフェースを備えた装置に、対象を読取るスキャナ110や、結果などを表示するディスプレイ120を接続できるようになっている。もちろん、本発明では、対象を読取るために何らかのスキャナが必要であるので、装置に内蔵することもできるし、その他の機能として結果を出力するプリンタを備えることもできるし、ネットワークに接続してデータベースと必要なデータのやり取りをすることもできる。具体的には、認証用の専用装置とすることもでき、カメラつき携帯電話やノートパソコン、あるいはパソコンにスキャナを接続するなど、本技術分野で知られた種々のシステム構成が可能である。
【0059】
図2は、本発明の一実施形態の機能ブロック図である。本実施形態では、ソフトウェアプログラムがCPU101上で実行され、本発明を達成するために必要な種々の機能が処理されるが、例えば図2に示すような機能ブロックごと処理することもできる。すなわち、対象をスキャンして画像を抽出する画像読取部201、得られた画像から個体差情報を算出する個体差情報算出部202、算出された個体差情報を比較する個体差情報比較部203および最終的に認証するかしないかを決定する判定部204などにより処理が実行される。本実施形態では、図2に示すような機能ブロックにより処理を実行するが、これに限られず、さらに機能ブロックを分割し、あるいは複数の機能ブロックを統合して異なる機能ブロックで処理を実行することもできる。
【0060】
本実施例の処理を図3、10ないし12を参照して説明する。ここで、本実施例は何らかの対象を、予め登録あるいは想定している対象と比較して、認証すなわち一致するか否かの判定を行うものであるから、本処理の前提として、既に説明した個体差情報が予め算出され、いずれかに記憶されているものとする。予め算出された個体差情報は、例えば、ROM102やRAM103などの装置内部のメモリに記憶しておいても良いし、外部の記憶装置やネットワークを介して取得することもできる。
【0061】
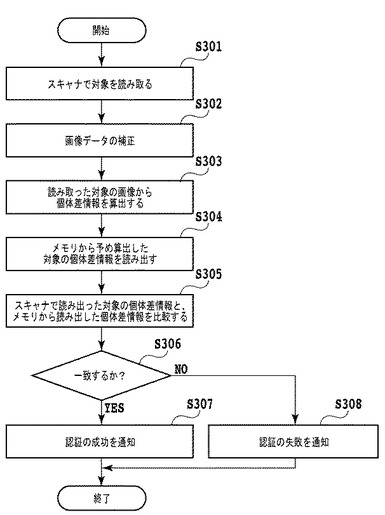
図3は、本発明の一実施形態の認証処理を示すフローチャートである。画像読取部201は、スキャナ110を用いて対象を読み取り画像データを出力する(S301)。読取に用いたスキャナ110は、予め個体差情報を算出するために使用された読取装置とは異なることが通常であるから、このようにして得られた画像データに一定の補正をかけ、読み取り差異がなくなるようにする(S302)。本実施例では、予め標準的な教示データを用いて個体差情報を算出するために使用する撮像機器等の位置補正、センサ受光色温度補正、ホワイトバランス補正、ISO感度補正、レンズの歪補正、色収差補正、集光補正、照明の光量補正、スペクトル補正、撮像機器のタイプによる変換などの解像を標準化するための補正値を取得しておき、この補正値を用いて構成されたフィルタを解像されたイメージデータに適用することにより、イメージデータの各ピクセル値を変換し、撮像機器構成などによらず一定の条件でイメージデータの読み取りを可能とするが、これに限られることなく記憶装置に記憶するなど別途補正値データをやり取りし、あるいはその他本技術分野で知られた方法によりイメージデータを生成することができる。
【0062】
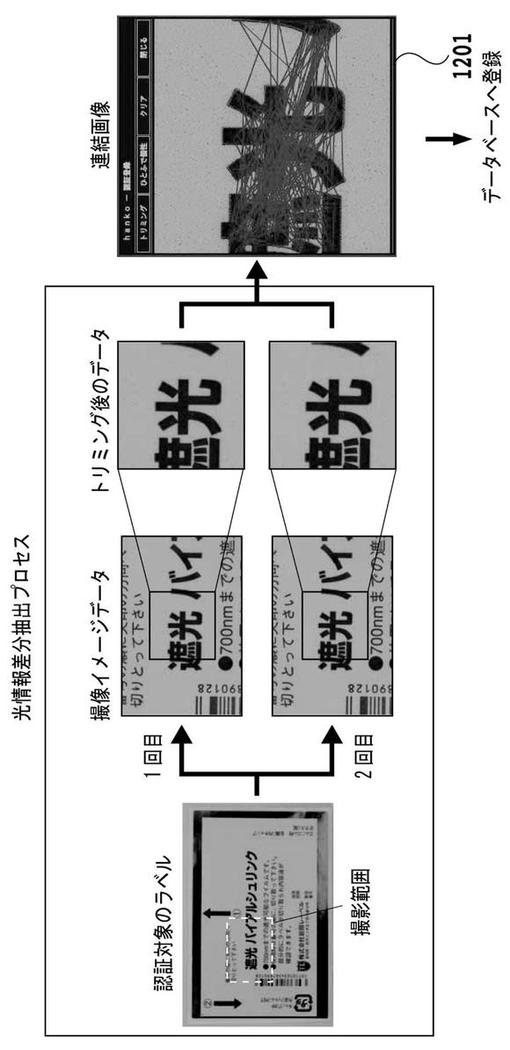
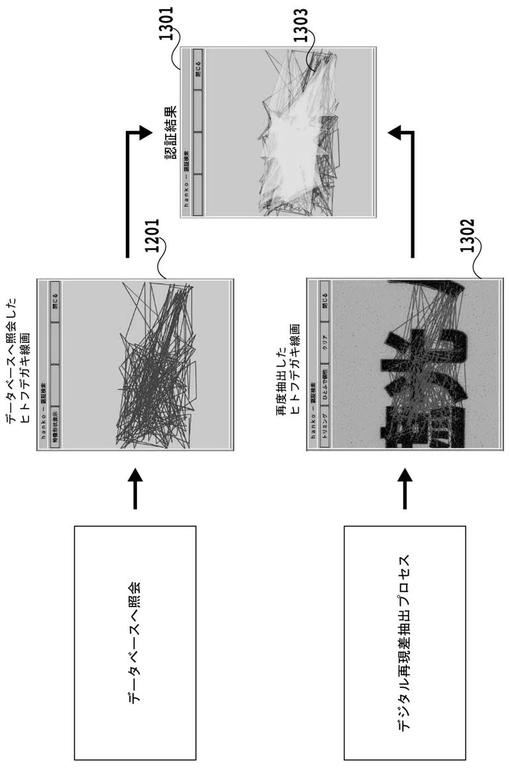
次に、対象画像のうち通常は一部分を用いて認証することができる。図11は、本発明の一実施形態の具体的な応用例の抽出処理を説明するための図である。図11に示すように、対象となるのは何らかの製品に付されている表示ラベルであり、一種の印刷物である。このラベルのうちの適当に定められた一定のエリアを対象として画像を2回読み取り、得られた2つの画像からヒトフデガキ線画を生成する(S303)。次に、メモリ等から予め算出したヒトフデガキ線画を読み込み(S304)、図12に示すようにS303で生成されたヒトフデガキ線画と比較する(S305)。図12は、本発明の一実施形態の具体的な応用例の一致判定処理を説明するための図である。比較は、例えば上述したポリゴンによる連結比較法を用いて行い、一定の確率で一致が認められれば(S306)、認証成功を通知し(S307)、認められなければ認証の失敗を通知する(S308)。本実施例では表示ラベルの印刷部分を使用して認証判定したが、これに限られず本技術分野で知られたいずれの方法も用いることができる。例えば、目印としてラベルに予め印鑑を押下しておきその印影を対象とし使用することもでき、容器のいずれかの表面から色情報が読取れればそのようなデータを使用することもできる。
【0063】
本実施例では以下のような装置及び設定等により、医薬品ラベルを用いて個体差抽出および個体差認証の処理を行った。認証対象のラベルは、縦横の長さが44.0[mm]×74.0[mm] のフィルム基材ラベルとし、印刷時に、特別なインクを使用したり、特殊な加工は行ったりはしていない。ヒトフデガキ線画の形式はシーケンス式とし、撮像用機材は、1075 万画素のCCD デジタルカメラ、フォーカスはマニュアルフォーカス、感度はISO100、絞りはF = 8、シャッタースピードは1/20[s]、撮影画像サイズ(W×H)は3872×2592[pixel]に設定し、撮影回数は2回とした。
【0064】
具体的には、以下の手順で個体差特徴の抽出を行った。
(1)図11に示すように、対象のラベルを、撮影範囲が縦横15.5[mm]×23.2[mm] になるようにセットし、上記の条件により2回撮影し、2枚分のイメージデータを得る。
(2)得られた2枚のイメージデータをそれぞれ8.7[mm]×8.7[mm] のサイズでトリミングし、次式で定義する光情報差分D(x,y)を2枚のイメージデータより求める。イメージデータ1をg1(x,y)、イメージデータ2をg2(x,y)とする。 X,Yは、イメージデータのx座標、y座標の集合とする。
【0065】
【数7】
【0066】
ただし、g1R(x,y)は、g1(x,y)のRGB値のR成分を表しており、その他も同様である。
(3)次の条件で、ヒトフデガキ線画を生成する。不安定再現要素の連結順位は降順連結、連結最低距離は、62μm、不安定再現強度の閾値は10.0、連結数は250として、上記で得られた光情報差分から図11に示すヒトフデガキ線画1201を生成する。
(4)得られたヒトフデガキ線画1201を、認証対象の個体差特徴としてデータベースに付帯情報(使用した装置の設定、ヒトフデガキ線画生成条件など) と共に格納する。
(5)上記(1)と同条件で再度、対象を2回撮影し、同様に図12に示すようなヒトフデガキ線画1302を生成する。
(6)付帯情報にもとづいて、ヒトフデガキ線画をデータベースに照会し、データベースから呼び出したヒトフデガキ線画1201と、ここで求めたヒトフデガキ線画1302とを連結の先頭よりマッチングする。マッチング条件は、以下のように設定した。マッチング形状は、3点形状。一致判定最低形状数歯、4ポリゴン。
(7)マッチングの結果は図12に示すような認証結果1301となる。図12に示すように一致したポリゴン1303は一致形状数が26個で、4ポリゴン以上という条件を超えているので、登録したヒトフデガキ線画と同じ対象であると判定され、認証が成功したことが確認できる。
【0067】
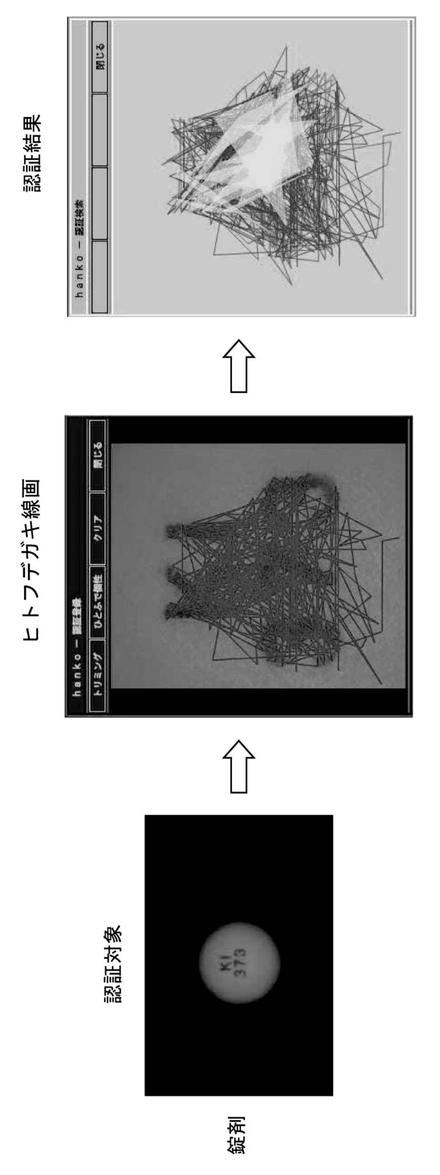
図13ないし16は、本発明の一実施形態の具体的な別の応用例を説明するための図である。図13に示す例は、錠剤を対象とするものである。錠剤は、一般にその錠剤が何であるかを示すマークや名称などが表面に印刷されている。この印刷部分に本発明を用いて、錠剤1つ1つを個別に識別することができる。例えば、製造時に個体差情報を作成しておけば、どの工場のどのロットでいつ製造された錠剤かを一意に特定できることができ、様々な活用を期待することができる。また、錠剤表面自体から色情報を読取ることができれば、マーク等が印刷されていない錠剤でも本発明を用いて個体識別が可能となる。
【0068】
上述の医薬品ラベルと同様に具体的な認証処理を説明する。図13に示すように、錠剤は、縦横の長さが7.5[mm]×7.5[mm]の白地にグレーの刻印がある円形錠剤を使用した。これは一般的に購入できる市販薬である。撮像用機材は、上述の医薬品ラベルの例で用いたものと同じ機材とし、撮影条件は、シャッタースピードのみ1/50[s] とし、その他の値は同じ設定とした。また、撮影回数も同じ2回とした。
【0069】
以上の条件で下記のように個体差特徴の抽出を行った。
(1)対象の錠剤を、撮影範囲が縦横15.5[mm]×23.2[mm]になるようにセットし、上記の撮影条件により2回撮影し、2枚分のイメージデータを得る。
(2)2枚のイメージデータをそれぞれ、縦横4.2[mm]×3.5[mm] のサイズでトリミングし、上述の医薬品ラベルと同様にデジタル再現差を2枚のイメージデータより求める。
(3)連結イロメガネは、ヒトフデガキ線画形式:シーケンス式、連結順位;降順、連結最低距離:63μm、不安定再現強度の閾値:20.0、連結数:250とし、これによりヒトフデガキ線画を求める。求めたヒトフデガキ線画を図13に示す。
(4)求めたヒトフデガキ線画と付帯情報とをデータベースに格納し、認証登録を完了する。
(5)上記、(1)と同条件で再度、対象を2回撮影し、ヒトフデガキ線画を抽出する。
(6)同様に、データベースから呼び出したヒトフデガキ線画と今求めたものを連結の先頭よりマッチングをとる。マッチング条件は、マッチング形状:3点形状、一致判定最低形状数:5ポリゴンに設定した。
(7)マッチングの結果を図13に示す。一致形状数は13個であり、認証が成功したことを表している。
【0070】
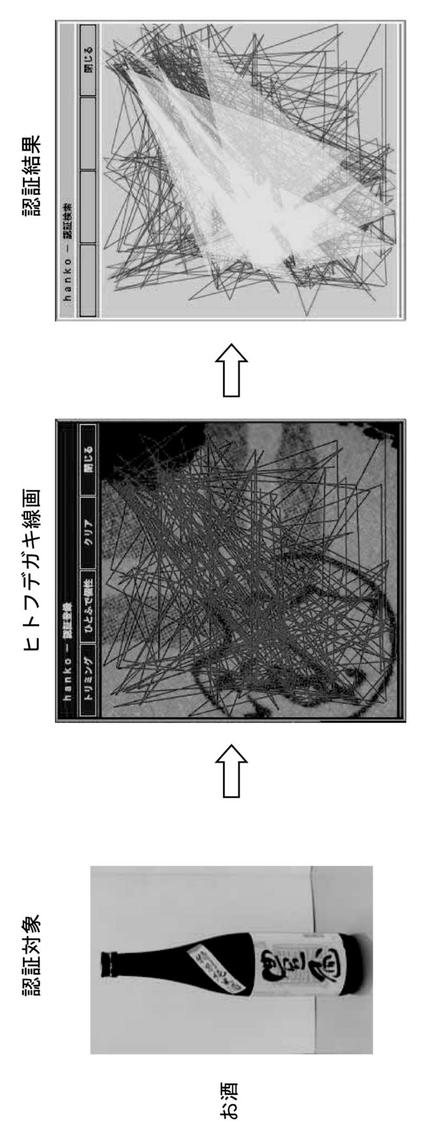
図14に示す例は、日本酒やワインなどのラベルに、本発明を適用する例であるが、ラベルの特定部分を定めるため、例えば落款や印章の部分などを使用することもでき、予め読み取り場所を詳細に定めなくても、容易に読み取り領域を特定することができる。あるいはまた、本発明による認証に使用するために、印鑑を押下して表れた像を対象に読み取りを行って認証処理をすることもできる。
【0071】
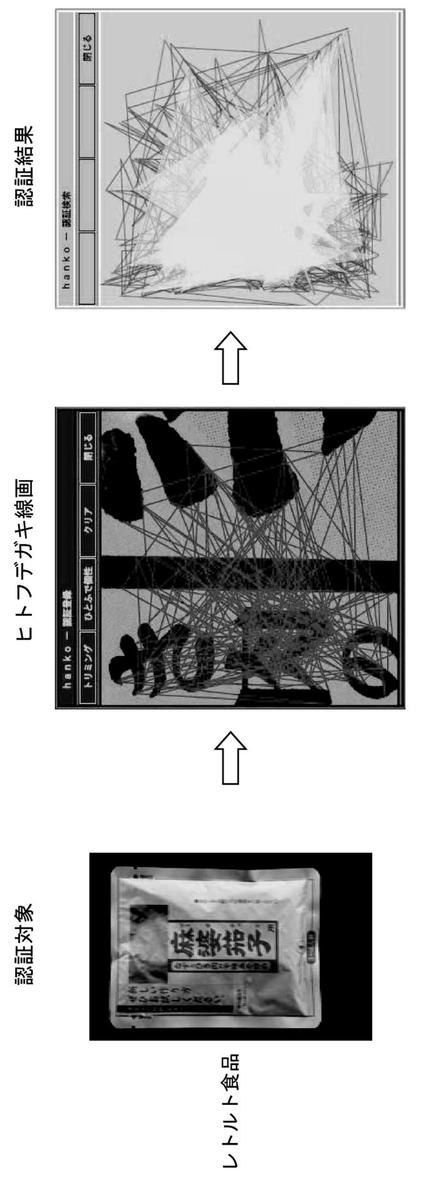
図15に示す例では、レトルト食品の印刷部分を使用しているが、このように対象はどのような素材にどのような方法で印刷等されても、スキャナ等で読み取って画像を生成することができれば本発明に使用することができる。
【0072】
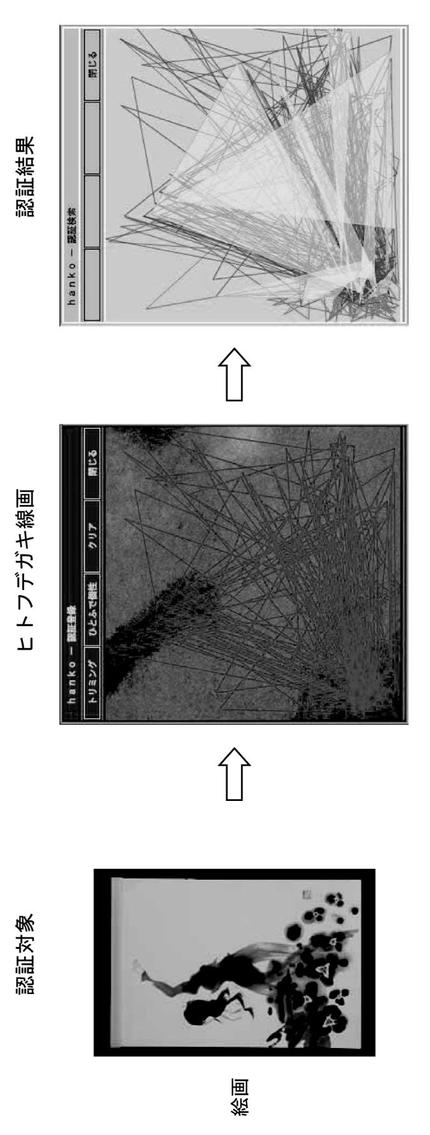
図16に示す例では、絵画の識別に本発明を用いているが、全体が印刷物であるため、どの部分を使用しても本発明を適用することができる。また、経年劣化が激しいこのような対象でも、一定の割合で一致する連結点が欠損せず保持されるため、認証精度を保つことが可能である。
【0073】
上述の実施例の中では、錠剤を除きいずれもどの領域を用いて認証するかを特定する必要があるが、本技術分野で知られた、例えば予め右端の部分であると決めておいたり、別途指定領域の情報を伝達したりするなどにより特定することができる。
【技術分野】
【0001】
本発明は、認証システム並びに認証情報登録および照会方法に関し、対象の画像に固有な特徴を画像データから抽出し、抽出した特徴を用いる認証システム並びに認証情報登録および照会方法に関する。
【背景技術】
【0002】
従来から、人間の活動のあらゆる局面で、正当な対象であるか否かを判定する様々な認証技術が用いられており、インターネットや情報の電子化の進展からより高度な認証技術が求められている。古典的な認証技術としては、印鑑や署名など独特の形状を対象に標示させることが行われてきたが、偽造などにより現在ではホログラム、すき入れ(透かし)、潜像模様、パールインキ、マイクロ文字、特殊発光インキ、凹版印刷などの技術を用いて偽造防止を図っている他、電子化の進展にあわせ現在ではパスワードなどの一定の情報を暗号化等して秘密にしておき、そうした秘密情報と照合することにより、偽造防止を図っている。また、指紋など個人の人体に固有な生体情報を予め登録しておき、認証が必要な場合に実際の生体情報を読み取って登録された生体情報と一致するか否かで認証を行う様々な生体認証技術も用いられている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−205393号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記の認証技術のうちパスワードを用いる技術は、予めパスワードを決定し、使用者自体も記憶していなければならいため、情報量が極めて少なく、窃取や偽造が容易であるという問題がある。
【0005】
また、生体情報を用いる技術においては、正当な対象であるか否か判定できるのは人間のみであり、それ以外の物や動植物などには基本的に使用できない。また、近年では生体情報自体を偽造する行為も発生してきており、必ずしも完全に安全な認証技術とは言えないという問題がある。
【0006】
さらに、高度な認証技術の多くは、認証情報を予め対象物に、物理的または電子的に付加させる事が多く、対象物への加工が必要であるため、認証技術の普及を妨げる要因になるという問題がある。
【0007】
本発明は上記従来の問題に鑑みてなされたものであり、認証する対象に加工を必要とせず、対象の個別の特徴を一定の構成を有する標準的なデジタル撮像機器を用いて一定の構成条件で撮影したイメージデータから固有情報を抽出して、抽出した固有情報に基づいて正当な対象であるか否かを判定する認証システム並びに認証情報登録および照会方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1に記載の発明は、デジタル撮像手段の走査により認証対象を解像して得られた複数のデジタルデータの特定された対応位置における光情報差分を算出し、デジタル撮像手段のピクセルサイズに対応する被写体における物理サイズにより算出された対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を、算出された光情報差分の大きい順に連結点として連結して生成される連結線を、対象を一意に特定する個体差情報として、連結線を記憶する記憶手段と、所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、得られた複数のデジタルデータを比較し、それぞれのデジタルデータが認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出手段と、前記算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して対応位置における、記憶手段に記憶された個体差情報の連結線読み出して、読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、連結点の位置が含まれる重ね合わせたピクセルの物理面に対応するピクセルの光情報差分を算出して算出した光情報差分が、連結線の順序に対して、所定の関係にあると判定される場合は認証が成功したと判定する個体差情報抽出判定手段とを備えることを特徴とする。
【0009】
請求項2に記載の発明は、請求項1に記載の認証システムにおいて、デジタル撮像手段の構成条件はデジタル撮像手段の解像度を含み、デジタル撮像手段の解像度は、認証対象の画像を形成する粒子の大きさよりも低い解像度であることを特徴とする。
【0010】
請求項3に記載の発明は、請求項1または2に記載の認証システムにおいて、変換値算出手段は、認証対象を連続して複数回走査することを特徴とする。
【0011】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載の認証システムにおいて、予め設定された情報により、デジタル撮像手段の構成条件の相違によるイメージデータの相違を標準化するための補正を行う補正手段を更に備えたことを特徴とする。
【0012】
請求項5に記載の発明は、請求項1ないし4のいずれかに記載の認証システムにおいて、記憶手段は、連結線の比較のためのパラメータ及び比較方法を含む連結比較設定をさらに記憶し、個体差情報抽出判定手段は、記憶手段に記憶された比較設定を用いて、読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、算出した光情報差分が、連結線の順序に対して比較設定に定められた所定の関係を有している場合は認証が成功したと判定することを特徴とする。
【0013】
請求項6に記載の発明は、請求項1ないし5のいずれかに記載の認証システムにおいて、個体差情報抽出判定手段は、算出した光情報差分が、連結線の順序に対して、所定の数降順である場合は認証が成功したと判定することを特徴とする。
【0014】
請求項7に記載の発明は、認証情報登録方法であって、所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、得られた複数のデジタルデータを比較し、それぞれのデジタルデータが認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出ステップと、算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して特定された対応位置における光情報差分を算出するステップと、デジタル撮像手段の構成条件からデジタルデータのピクセルサイズに対応する被写体における物理サイズを算出し、算出された物理サイズにより、対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を連結点として算出し、算出した光情報差分の大きい順に、任意の回数降順に連結店を連結し連結線を個体差情報として抽出するステップと、抽出された連結線を記憶手段に登録する登録ステップとを備えることを特徴とする。
【0015】
請求項8に記載の発明は、デジタル撮像手段の走査により認証対象を解像して得られた複数のデジタルデータの特定された対応位置における光情報差分を算出し、デジタル撮像手段のピクセルサイズに対応する被写体における物理サイズにより算出された対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を、算出された光情報差分の大きい順に連結点として連結して生成される連結線を、対象を一意に特定する個体差情報として、連結線を記憶する記憶手段を備えた認証システムにおいて、所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、得られた複数のデジタルデータを比較し、それぞれのデジタルデータが認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出ステップと、算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して対応位置における、記憶手段に記憶された個体差情報の連結線読み出して、読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、連結点の位置が含まれる重ね合わせたピクセルの物理面に対応するピクセル光情報差分を算出して算出した光情報差分が、連結線の順序に対して、所定の関係にあると判定される場合は認証が成功したと判定する個体差情報抽出判定ステップとを備えることを特徴とする。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態における認証システムのシステム構成図である。
【図2】本発明の一実施形態の機能ブロック図である。
【図3】本発明の一実施形態の認証処理を示すフローチャートである。
【図4】本発明の原理を説明するための図である。
【図5】本発明の一実施形態の個体差認証形状の抽出処理を説明するための図である。
【図6】本発明の一実施形態の個体差認証形状の抽出処理を説明するための図である。
【図7】本発明の一実施形態の個体差認証形状の抽出処理を説明するための図である。
【図8】本発明の一実施形態の予め抽出された個体差認証形状を用いて行う認証処理を説明するための図である。
【図9】本発明の一実施形態の予め抽出された個体差認証形状を用いて行う認証処理一致判定の一例を説明するための図である。
【図10】本発明の一実施形態の抽出された対象画像の補正処理の一例を説明するための図である。
【図11】本発明の一実施形態の具体的な応用例の抽出処理を説明するための図である。
【図12】本発明の一実施形態の具体的な応用例の一致判定処理を説明するための図である。
【図13】本発明の一実施形態の具体的な別の応用例を説明するための図である。
【図14】本発明の一実施形態の具体的な別の応用例を説明するための図である。
【図15】本発明の一実施形態の具体的な別の応用例を説明するための図である。
【図16】本発明の一実施形態の具体的な別の応用例を説明するための図である。
【図17】本発明の一実施形態の連結イロメガネの例を示す図である。
【図18】本発明の一実施形態のヒトフデガキ線画の連結方式の一例を示す図である。
【図19】本発明の一実施形態のヒトフデガキ線画の連結方式の別の例を示す図である。
【図20】本実施形態の個体差情報を登録する処理を示すフローチャートである。
【図21】本実施形態の認証処理を示すフローチャートである。
【図22】本実施形態の光情報差分の算出の詳細を説明するための図である。
【図23】本発明の一実施形態の予め抽出された個体差認証形状を用いて行う認証処理一致判定の一例を説明するための図である。
【発明を実施するための形態】
【0017】
以下本発明の認証システム並びに認証情報登録および照会方法について図面を参照して実施形態を説明する。
【0018】
<個体差認証システム原理>
本実施形態のシステムは、認証する対象に加工を必要とせず対象の個別の特徴を一定の構成を有する標準的なデジタル撮像機器を用いて一定の構成条件で撮影したイメージデータから抽出した対象の固有情報に関する原理、固有情報を読取画像から抽出する固有情報抽出方法および抽出された固有情報に基づいて適宜必要時に対象を認証する個体差認証方法に従って、対象の同一性を判定する。また、対象とは、印刷物、様々な完成品、部品などの物質や人体など、その表面をスキャンあるいは撮像して画像を読取ることができるものであればいずれのものも含むことができる。
【0019】
<個体差に基づく固有情報>
デジタル撮像装置、例えばスキャナやカメラなどによる、現実に存在する物質の走査は、表面の状態を数値化することであるが、対象の物質構成の全てを読取ることはできない。物質の表面の走査とは、一瞬一瞬の物質表面上で起こる現象の写像であるといえる。例えば、光波長(短波長側360nm〜400nmと長波長側760nm〜830nmとの間の可視光領域)内の光に反応する画像素子等の受光部を平面に配列するイメージセンサ(CCD・CMOS)による画像走査(スキャン)では、画像処理や三原色への分光方法および素子構成に相違はあるが、集光した光をRGB他に分光し、各々の受光部の電荷反応を数値化して、数値を順に並べ、配列データとして出力するカラー撮像プロセス(数値画像化プロセス)によりデジタル再現された、現象の写像が行われる。それら光の写像情報はXYZの配列に対応した解像度の尺度に置き換えられた数値ということになる。さらに、イメージセンサにおいては、解像度が高い、すなわちセンサを構成する各受光部が光の波長の長さより小さければ光として観察は不可能であり、大きければ逆にその各受光部による物質自体の個々の観察も不可能となる。加えて、自然物質は、ランダムに配置されているため、受光部が配列で構成されるイメージセンサでは自然物そのものを再現することは不可能である。
【0020】
これが分解能であり、イメージセンサの走査単位である素子のサイズに応じて受光した光に反応し、この反応を数値化して配列、つまりイメージセンサに所定の形態で配置された素子に各々受光した光に応じて発生した電気量を配列したものがイメージデータである。従って、この数値化も、結局1つの走査単位に対応する対象の部分内の現象を数値化して色圧縮処理したものであり、これを配列したイメージデータは、走査単位のサイズに応じて解像された現象ということができる。すなわち、スキャンされたイメージデータは解像度などの構成条件に応じて変化するが、本実施形態ではこの現象に着目し対象の固有な情報を抽出する。ここで、構成条件とは、撮像素子の物理的位置、種類、サイズ、解像度、レンズ構成、レンズ倍率、LEDなど照明機器の物理的位置、輝度、周波数特性、色温度、認証対象との被写体間距離、フォーカス位置、焦点距離、シャッタースピード、フレームレート、認証対象とレンズ、および撮像素子で構成される光学系の相対位置関係などのパラメータにより構成される撮像機器構成と撮影条件とである。
【0021】
実際に正当性を判定することとなる対象は、自然物質で構成されているため、その最小サイズは、ナノ・マイクロサイズよりさらに小さい「粒子」である。光子はそれより大きく、さらに可視光では、波長は短波長側360nm〜400nmと長波長側760nm〜830nmとの間の可視光領域内とされているため、このサイズより小さい単位の物質は単体では光(可視光)を反射しない。したがって、センサによる数値化によっても、解像度よりもはるかに微細な自然物質自体の現象は解読できないが、読取結果、すなわちセンサにより出力された値はサイズ内の現象に左右される。すなわち、少し(マイクロオーダ)でも走査位置がずれる、すなわち同一の対象を複数回読み取った場合に得られたイメージデータのデータ配列のうち対応する位置と、その読取った素子の相対位置とが僅かにずれると、その対応するイメージセンサの素子で読取られる光情報の数値は影響を受け、よって同一の対象を同一の条件で走査しても同じ走査情報が得られないこととなる。これは、光の波長サイズより小さい解像度を持つイメージセンサが存在しない限り必ず起こり、この読取結果の差異を本願では解像差と呼ぶ。このような解像差を具体的なCCDセンサを用いて説明したのが図4である。ここで、図4に示す例は、本原理を適用する一例に過ぎず、本発明はこの例に具体的に示されたいずれの技術によっても限定されるものではない。
【0022】
図4を参照すると、一般に認証対象を読み取るスキャナで使用される、例えばCCDセンサでは、図に示すように一定の間隔をもって配列された撮像素子により、RGB 等に分光され、撮像素子の開口部から入る波長(短波長側360nm〜400nmと長波長側760nm〜830nmとの間の可視光領域)の可視光が電荷に変換され蓄積される。この蓄積された電荷を光の強弱として、デジタル化し、デジタル化されたRGB 等の数値により、撮影対象は、撮像素子のピッチと開口部によって制限される入射光が、1素子に対して1色に色圧縮され、色の配列データとして表現される。このようにして得られる色の配列データは、撮像素子の位置を表す座標とRGB 等の表色系のそれぞれの成分を表す数値データとして表現される。例えば、(X座標,Y座標:R,G,B)とすると、図に示すように(1,1: 112, 28, 93)、(1,2: 17, 30,104)、(1,3: 39, 36,107)・・・といったデータが得られるが、これらの値は、スキャナで読み取られるたびに走査位置がマイクロオーダで変化するため異なる値となる。
【0023】
この解像差は、ナノ・マイクロサイズで印刷されている印刷物においても同様に発生する。印刷物のような複製品(量産品)において、走査して得られた画像は、実際の現象から現実的に観察できないナノ・マイクロレベルの印刷誤差・紙面の違いが影響している。つまり、この解像差には、意図せず作られた、または意図しても同一物を量産製造不可能なナノサイズの粒子による個体の特徴が反映されるのである。この個体の特徴に起因して発生する、対象読み取り時の解像差による差異を、本願では「個体差」と呼ぶ。
【0024】
<対象に固有な情報の抽出>
本発明では、この個体差を、これには限られないが印刷物等の対象から取得し、取得した個体差から1つの対象に対し一意な情報を抽出して認証処理に使用する。そのような対象に固有な情報の抽出法の1つを説明する。上述したように、走査毎に出力されるイメージデータは、解像の再現を不安定にしており、ここに個体差が反映されている。しかし、単純に解像した結果得られた値自体は通常は一定ではないことから、そのままでは対象を一意に表す情報として使用することは出来ない。そこで、個体差から一定の関係性を得られる情報を抽出する。すなわち、得られた読み取りデータを、各読み取りデータの対応する位置毎に比較してその変化が大きい順番に並べ、その相対位置関係を3次元座標に置き換えて順に連結し、一定の折れ線の形状、すなわち個体差により同一の解像を妨げる要素である「不安定再現要素点」が不安定再現強度順に並んだ「線」を生成する。この「線」は、先に述べたようにスキャナのセンサの解像度にかかわらず、対象を画像として読み取れば必ず生成することができ、この「線」を生成する順序には、対象に固有な情報の一意性に基づく一定の普遍性が現れる。
【0025】
このような線は、その生成順位が不安定再現を起こす順位のため、具体的には同一の対象を最低2回走査してその差の順位を特定することによって求めることができる。本発明の基本的な原理は、同一の対象でも走査するたびに物理的(光の波長・物性)な条件により同じ結果は得られないため、単に得られた個体差の比較では類の識別は可能であっても個の識別は印刷物のような量産品においては困難であるという課題に対して、個体差自体の比較ではなく、読取られる配列毎の解像再現性の不安定さの順位関係を観察して個の識別を可能にするという、より具体的な手法によって実現可能となる。これは、物理的に対象が存在することと、これもまた物理的にイメージセンサの配列関係が存在するという事実とから得られる。すなわち、イメージセンサの配列は、物理的に一定であるため、走査毎の走査位置のずれが生じてもイメージセンサ内部構成の崩れる可能性は、少なくとも走査位置のずれの発生の可能性よりは低いため、その配列は構成状態を保っていると考えていい。従って、走査領域のイメージデータ(配列値)から得られた「線」において、その位置関係は保持される。すなわち、イメージセンサの対応する各素子について値は走査毎に変化するが、その差異の順位は保持されるということである。また、例えば異なる印刷物の対象において、この「線」形状を順に走査しても一致する確率は低く、「不安定再現要素点」の個数によって後述するような確率のものとなり、認証判定が十分に可能なものである。この「線」は、不安定解像、すなわちイメージデータの対応する各素子で得られる値の不安定さを再現することから、不安定再現を起こす順位でもある。ここで、この「線」は不安定さの再現性の程度を表現できれば良いことから、結局同じ対象を連続して最低2回走査してその差の順位によって求める事ができる。すなわち、例えば連続して2回走査して得られたイメージデータは、その走査の解像レベルよりも小さい対象の(微細な)特徴により僅かに異なるものとなり、その差異を例えば順位という概念で処理することにより、その対象の微細な特徴を把握することができるのである。ここで、2回の走査は通常連続して、つまり一定の時間内で行うが、これは時間間隔を開けすぎると対象内で起こる現象が大きく変化してしまい、上述のような原理が働かなくなる可能性があるからである。例えば、1回目の撮影後撮像機器の電源を落とした場合など、イメージセンサ内の電荷量、光量に対する感度などの非可逆性等により撮像条件が大きく変化してしまい、調整するのが困難になる可能性がる。したがって、複数回の撮影は一定の近接した時間内で行ったり、ほぼ同様の撮影条件が保たれていたりする状態で引き続き撮影されるのが好ましい。このようにして本発明の原理に従えば、何ら新しい機器を必要とせず1回の解像処理では捉えきれない現象を複数のイメージデータから推定することで、イメージセンサの分解能を超えた対象の現象を獲得することができることとなる。
【0026】
以上のような原理を適用し、以下に対象に固有な情報の抽出処理の1つを説明する。図5を参照すると、図4を参照して説明したように、CCD やCMOS イメージセンサを搭載するカメラ501で対象502を、同一の構成条件で連続して複数回走査しデジタルデータとして解像する。図20は、本実施形態の個体差情報を登録する処理を示すフローチャートである。
【0027】
認証時には異なる撮像機器を使用することも考えられるため、予め標準的な教示データを用いて個体差情報を算出するために使用する撮像機器等の位置補正、解像度、センサ受光色温度補正、ホワイトバランス補正、ISO感度補正、レンズの歪補正、色収差補正、集光補正、照明の光量補正、スペクトル補正、撮像機器のタイプによる変換など、解像を標準化する、すなわちケンガン補正するための補正値を取得しておき、この補正値を適用するために構成されたフィルタを解像されたイメージデータに適用する。これにより、イメージデータの各ピクセル値を変換し、撮像機器構成などによらず一定の条件でイメージデータの読み取りを可能とするが、これに限られることなく記憶装置に記憶するなど別途補正値データをやり取りし、あるいはその他本技術分野で知られた方法によりイメージデータを生成することができる。例えば、登録時と認証時とで異なる解像度の撮像機器を使用した場合でも、予め解像度を記録しておいて、低い解像度のイメージデータの解像度を高くしたり(数値自体は変わらずデータ量が解像度が高くなる分増加する)、低くしたりして同じ解像度に換算して処理することができる。
【0028】
現実の物体の像512、522は1回目も2回目も同一であるが、1回目に解像されたイメージデータ511と、2回目に解像されたイメージデータ521とを比較すると、スキャナの微細な走査位置の相違などにより、解像された配列データは異なるものになっていることが理解される。具体的には、1回目の読み取り時のイメージデータ511の配列である(1,1: 112, 28, 93)(2,1: 17, 30,104)(3,1: 39, 36,107)(4,1: 221, 38,108)・・・に対し、2回目のイメージデータ521の配列は、(1,1: 110, 45, 99)(2,1: 28, 24,167)(3,1: 35, 41,100)(4,1: 209, 43,111)・・・と少し異なるものとなっている。
【0029】
次に、以上のように複数回読み込むことにより得られた複数のイメージデータから解像差を抽出する。具体的には、図6に示すように、複数、ここでは2つのイメージデータ601及び602からその差分画像603を抽出し、複数回解像した場合に起こる解像差を光情報差分として顕在化した個体差を捉える。実際に解像差を算出する場合は、異なる点同士を比較しても意味がないから、それぞれのイメージデータが被写体同じ部分を写像する位置が重ね合わせるための移動と回転の変換値を算出する。イメージデータに算出された各々の変換値を用いて、各イメージデータのピクセル配列を重ね合わせ、重ね合わさる位置のピクセルの光情報を比較して光情報差分を算出する。この位置の重ね合わせのための変換値の算出には本技術分野で知られたいずれの方法も用いることができる。
【0030】
例えば、このような変換値は、各々のイメージデータから特徴的な点を何点か抽出し、それらの特徴点が一致するようにアフィン変換する等して算出することができるが、これに限られない。なお、本実施形態では、複数のイメージデータ同士を比較するために、相互に対応する点を特定し、それらの点が重ね合わさるようにするためにイメージデータをどのように平行等の移動や、回転を施す必要があるかを示す変換値を求め、実際にイメージデータを変化して重ね合わせてしまわずに、変換値を用いて対応する点を特定して、その対応する位置にあるピクセルの光情報の差分を取るが、これは、実際に変換処理をしてイメージデータを重ね合わせると、微妙なズレが生じる可能性があるからである。したがって、このようなズレを回避することができれば、実際にイメージデータに変換処理をしてから差分を取って、以上の処理を行うこともできる。
【0031】
図22は、本実施形態の光情報差分の算出の詳細な一例を説明するための図である。上述の通り、本実施形態では、対象を複数回走査したイメージデータを、それが被写体を写像する位置を重ね合わせるための変換を行い、相互に対応している各ピクセルの光情報を比較して光情報差分を求めるが、具体的には、図22に示すような処理により実行することができる。まず、各イメージデータA2201、イメージデータB2202に対して被写体を写像する位置が重ね合わさるように変換値を求める。次に、各イメージデータA、Bを変換した結果、対応するピクセルの光情報(この例では、RBG成分)を比較し、その差を対応する物理位置の光情報差分とする。より具体的には、図22に示すように仮想的なイメージデータP2203を形成し(したがって、イメージデータPは、イメージデータA、Bよりも小さなサイズとなる)、イメージデータP2203の各点からイメージデータA、Bの対応する点を求める。イメージデータの拡大図A2205及びB2206に示すように、重ね合わせをしてもピルセルレベルでは、イメージデータAとBとは完全に一致することはなく、イメージデータA2205のあるピクセルは、イメージデータB2206の複数のピクセルと重なる。
【0032】
したがって、本実施形態では、例えば、光情報差分をとるため、1つのピクセルの光情報の値と、そのピクセルと重なる複数のピクセルの光情報の値との差分を取ることにより、光情報差分を算出するが、これに限られず本技術分野で知られたいずれの方法で算出することもできる。この場合、後述する連結点は、1つのピクセルの中心点2209と、対応する複数のピクセルの中心点の中心2210との中点2211とすることができる。この結果、得られた光情報差分をイメージとして色表現したものである。ただし、実際にはこのような中間過程は存在せず、光情報差分のデータより直接ヒトフデガキ線画が求められる。この各成分値を総和したものがイメージデータA、Bに対する光情報差分となる。
【0033】
このようにして、解像差は、対応するイメージの重なり合う位置における位相差として、例えば、図6に示すように各重なりあう位置におけるRGB各成分毎の差の絶対値の総和で表すことができる。ここで、2つのイメージデータ601、602の差分を取るにあたり、上述の通り各イメージデータのピクセルの重なり合う位置の特定をする必要があるために、予め各々のイメージデータの各特徴点などからそれぞれ対応する重なり合う位置を特定、すなわち被写体の同じ部分の光情報を比較できるように対応位置を特定している。このような重ね合わせの結果、A,B のイメージデータ601,602の物理対応位置に相当する各ピクセル値をRGB 成分毎に比較し、その差分を光情報差分として色表現したものが光情報差分C となる。すなわち、イメージデータ601の配列A(1,1: 112, 28, 93)(2,1: 17, 30,104)(3,1: 39, 36,107)(4,1: 221, 38,108)・・・およびB(1,1: 110, 45, 99)(2,1: 28, 24,167)(3,1: 35, 41,100)(4,1: 209, 43,111)・・・を実際の距離に換算し、A’(0.009,5.391,0.0: 112, 28, 93)(0.027,5.391,0.0: 17, 30,104)(0.045,5.391,0.0: 39, 36,107)(0.063,5.391,0.0: 221, 38,108)・・・(座標の単位はμm)およびB’(0.011,5.392,0.0: 110, 45, 99)(0.031,5.392,0.0: 28, 24,167)(0.048,5.392,0.0: 35, 41,100)(0.066,5.392,0.0: 209, 43,111)・・・とすると、A’(+)B’= CB’(0.011,5.392,0.0: 110, 45, 99)(0.031,5.392,0.0: 28, 24,167)(0.048,5.392,0.0: 35, 41,100)(0.066,5.392,0.0: 209, 43,111)・・・となる。
【0034】
以上のようにして得られた解像差は、対象に固有な特徴が反映されることから対象に一意な属性を有し、同一対象に対しさらに複数回読取って抽出して得られた結果同士に一定の相関関係が存在することとなる。この関係をより明確にする、すなわち対象の認証を可能にするため、得られた解像差から不安定再現要素点の連結を行う。換言すると、解像差から不安定再現要素点を不安定再現強度、つまり上述の例の各重ね合わせの位置の中点を光情報差分値の大きい順に並べると、この順位は撮影対象の解像処理に対して再現性、つまり同一の対象について一定の相関関係を持つ。不安定再現強度の数値、すなわち各イメージデータの光情報差分自体は、解像時の誤差の影響を個体差以上に受けるため、対象に固有な情報としては適さない。したがって、不安定再現強度の数値自体は無視して、位置情報のみを保持して並べ替えた順番でこの点を順に連結する。位置情報は、登録時と認証時の撮像機器構成が異なることにより被写体とイメージデータの大きさの比率が変化した場合などに対応するため、重なり合うピクセルの位置から、撮像機器構成である、撮像素子サイズ、レンズ構成、被写体間距離などの光学系の構成情報を用いて、イメージデータのピクセルサイズが対応する被写体の物理サイズ算出し、これにより重なり合うピクセルの中心点の物理写像位置の中点を求めて使用する。
【0035】
具体的には、図7に示すように、図6において光情報差分を求めるために重ね合わせを行った各イメージデータの変換値から、重なり合うピクセル位置をピクセル中心点に写像される被写体の物理位置(3次元位置)に変換し、その中点を個体差を表す折れ線形状の連結線を構成する各連結点の位置情報として採用する。光情報差分701D(25) (80) (16) (20)・・・を、光情報差分の値の順に並べ替え、その先頭から差分値の計算に使用した2つのイメージデータの対応するピクセルの中心位置に写像される被写体の物理位置A’(3.353, 0.072, 0.0) (1.771, 0.960, 0.0) (5.295, 5.245, 0.0) (4.276, 0.928, 0.0)・・・、B’(3.357, 0.072, 0.0) (1.773, 0.963, 0.0) (5.292, 5.247, 0.0) (4.275, 0.927, 0.0)・・・を求める。その中点(X,Y,Z軸の平均位置)の位置情報をL (3.355, 0.072, 0.0) (1.772, 0.9615, 0.0) (5.2935, 5.246, 0.0) (4.2755, 0.9275, 0.0)・・・とし、画像702に示すように走査領域のイメージデータから得られた個体差を表す連結線を生成する。ここで、このような連結線あるいは連結線を示す画像をヒトフデガキ線画と呼ぶ。得られたヒトフデガキ線画は、後述するように1回の解像処理では得られない、再現性がある順位を持つものであり対象に固有な特徴を表している。
【0036】
以上の処理により、対象の走査により得られたデータの個体差から抽出される個体差情報である、不安定再現要素点の連結データを得ることができ、本実施形態では、この個体差情報を用いて対象の同一性に関する認証を行うが、以上説明した個体差情報、及び抽出方法は、本発明の一手法に過ぎず、対象を画像として読取った結果得られるデータの解像差に反映される対象に固有な情報を示すいずれかの情報を個体差情報として、本技術分野で知られたいずれかの方法により抽出することにより本発明で用いることができる。また、上述の説明ではRGBの各成分の値を用いたが、本発明の原理から理解できるように対象の表面の状態を一定の解像度で光学的に走査して得られる、各走査単位における光の強度のデータの配列であればいずれのデータも用いることができる。
【0037】
<対象の認証処理>
以下、図8、10及び23を参照して、上記で得られた個体差情報から対象を認証する、つまり印刷物などの対象を、既に個体差情報を抽出した対象と同一か否かを、個体差情報を用いて判定する一手法を説明する。まず、その前提として、図8を参照し、不安定再現要素点の順位関係の再現性、つまり光情報差分の強度の高い順に並べた連結点の位置情報が、同一の対象についてのものの場合、一定の類似性を有することを説明する。図21は、本実施形態の認証処理を示すフローチャートである。
【0038】
図8に示すように、対象502は予め複数回スキャナ等で読取られたイメージデータから、画像801に示す連結線で表されるような個体差情報が抽出され、データベース等の何らかの記憶手段に記憶されている。ここで、対象502をさらにカメラ501で複数回走査し、画像802に示すように、予め抽出した画像801に示すヒトフデガキ線画に従って、ヒトフデガキ線画の連結位置が重ね合わせたピクセルと対応する位置の光情報差分を求め、具体的には連結の順番に従って連結位置を比較する。この比較の結果、このヒトフデガキ線画は、解像差に個体差が反映されることから、図8に示すように全く同一にはならないものの、例えば画像801に示すヒトフデガキ線画上の点と、画像802の点とで、不安定再現要素点の順位に一定の再現性を持ち、ヒトフデガキ線画803を得ることができる。このため、同一の対象について得られたヒトフデガキ線画同士では、対応する連結位置の連結順位に再現性が存在することとなるので、順位が一致する程度により同一性を判定することができる。
【0039】
ここで、本実施形態では光情報差分の強度の高い順に並べた連結点の位置を比較することにより対象の一致を判定しているが、ヒトフデガキ線画の比較の方法としては、これに限られず不安定再現要素強度の低い順に連結し、比較するなど、種々のパターンの比較方法、つまり連結比較法のバリエーションが考えられる。本発明を用いる場合は、撮像対象に最適なパラメータおよび比較方法を用いることで、認証対象の限定などが可能となるので、このようなパラメータおよび比較方法をあわせて、連結イロメガネあるいは連結比較設定と呼ぶ。連結イロメガネは、下記のように様々なパラメータを使用し、この組み合わせにより、ヒトフデガキ線画の連結方式が決められる。連結イロメガネの例を図17に示す。また、図18及び図19にヒトフデガキ線画の連結方式を示す。図18が、インデックス式を示しており、図19はシーケンス方式を示している。連結イロメガネで使用するパラメータ:((不安定再現要素強度の順位(正逆))(連結最低距離)(強度の閾値)(変化強度)(連結数)(走査領域)+α)である。
【0040】
また、これに対応するヒトフデガキ線画の形式の例を以下に示す。
「ヒトフデガキ線画」インデックス式:
((始点3次元座標XYZ)(始点3次元座ベクトル)(距離))+個数×((3次元ベクトル)(距離))
「ヒトフデガキ線画」シーケンス式:個数×3次元座標XYZ
すなわち、下記で詳述する降順の他に昇順、連結最低距離に満たない不安定再現要素点はスキップする、強度閾値以下の不安定再現要素点は連結しない、強度変化が一定以下の点はスキップする、連結数の最大値まで連結する、定義領域の範囲内のみ連結するなど種々の比較方法が可能である。なお、連結イロメガネは、対象が現れている素材自体や、対象の表現方法、すなわちどのようなインクを使用したどのような印刷方法かなどにより最適なものを選択することができ、実際の認証処理においては、予めどのような連結イロメガネを使用するかを定めておく必要がある。このため、上述の個体差情報を記憶しておくデータベース等には個体差情報に加え、どのような連結イロメガネを使用するのかをともに、あるいは一定の手法により関連付けて付随情報として記憶しておくことにより、最適な条件で個体差情報を使用して認証処理をすることができる。この付随情報には連結イロメガネのほかに、個体差情報を使用して対象の同一性を判定するために有効な、その他の情報も含めることができる。
【0041】
次に、具体的に同一性を判定、すなわち不安定再現要素点の順位の再現性を判定する手法を説明する。具体的な処理例として図23を参照して説明すると、認証対象の一致判定は、まず、最初に抽出され登録されたヒトフデガキ線画2301を連結順位に辿ることで、各連結位置が認証時に読み取り重ね合わせたイメージデータ2302のピクセルの物理面と対応するピクセルの光情報差分の値が所定の関係であるかどうかを見ることにより行う。ここで、一致判定は、連結イロメガネで定義された比較方法に従って行われる。例えば、一致ポリゴン形状が3点形状の場合は、ヒトフデガキ線画の連結の先頭から3点ずつ対応する順位関係が成立しているかを判定し、3点の対応関係が成立した場合、一致形状として一致ポリゴンをカウントする。次に、順に対応関係を判定していき、ヒトフデガキ線画の終点まで検索する。この結果、一致ポリゴン配列に一致形状が格納され、一致形状の個数が一致判定閾値以上の場合、認証成功と判定する。もちろん、所定のカウント数まで一致ポリゴンを探索し、そのカウント数を越えた時点で認証が成功したとして処理を終了させることもできる。
【0042】
本実施形態では、認証時に連結線を生成せずに、登録された連結線に沿って認証時に走査したイメージデータをたどり一致順位の数をカウントしたが、認証時にも連結線を生成して、連結線同士を同様に比較して同一性を判定することもできる。具体的に図9を参照して、ポリゴンによるマッチングを説明する。すなわち、ヒトフデガキ線画を比較する1つの手法として、ヒトフデガキ線画の始点から順に3点ずつ対応関係をとり3点が一致した場合一致ポリゴンが存在すると係数することにより同一性の判定を行う。ポリゴンによるマッチングも、最初に抽出され登録された個体差情報の画像901に示すヒトフデガキ線画と、認証時に再度抽出した個体差情報の画像902に示すヒトフデガキ線画とを比較することで行う。2つのヒトフデガキ線画は、上述の連結の順位などのいずれかの連結イロメガネに従って比較され、一致判定され、連続する3点から三角形が形成される(一致ポリゴン形状が存在する)ので、マッチング画像903に示すようにヒトフデガキ線画の先頭から3点ずつ対応する順位関係が成立しているかを判定し、3点の対応関係が成立した場合、一致するポリゴンをカウントする。このように順に対応関係を判定していき、ヒトフデガキ線画の終点まで検索する。この結果、一致ポリゴン配列904に一致形状が格納され、一致形状の個数が一致判定閾値以上の場合、認証成功と判定する。
【0043】
<認証一致確率について>
デジタル撮影機器の解像度で解像される認証対象の物理サイズとフォーカスによって集光されるイメージデータのサイズ(ピクセルサイズ)に対応して、不安定(解像)再現強度点を重複せずに単純に強度順に全てのピクセルをつないだ場合に一致する確率が、点数を減らした場合どのように変化するかを以下に説明する。ここで、読み取られるイメージデータの枚数は2枚とし、解像度は同じものとする。
【0044】
上記の認証方法に基づき、最終的に、ヒトフデガキ線画は座標位置だけの相対関係のデータとなり、このヒトフデガキ線画が偶然に一致する確率は、以下に述べる式で表わされる。トリミング後の画像のx,y,z方向のサイズを、Xt, Yt, Ztとすると、不安定再現要素点の不安定性は一様であるとした場合、各要素点の自由度は、Xt×Yt×Ztとなり、不安定再現要素点の総数をNとすると、イメージデータ上の任意の1点が不安定再現要素点である確率は、
【0045】
【数1】
【0046】
となる。ヒトフデガキ線画のマッチングを行った場合に、この1点が一致する確率は、登録時の画像のサイズを、Xr, Yr, Zrとすると、ピクセルに対応する物理位置が別のイメージデータの対応ピクセルの領域に入る場合と捉えると、
【0047】
【数2】
【0048】
となり、一致ポリゴン形状を3点形状とした場合、最初の3点が全て一致する確率は、
【0049】
【数3】
【0050】
となる。これを2番目以降の3点についても適用すると、一致形状数がPの場合の認証一致確率Rは、
【0051】
【数4】
【0052】
また、ヒトフデガキ線画として連結する不安定再現要素点の数Nを、イメージデータの全ピクセルとした場合は、
【0053】
【数5】
【0054】
となり、連結数を減らしていくに従って、偶然に一致する確率は高くなることが分かる。逆に、認証判定の精度を上げるためには、一定以上の連結数の一致を条件とする必要がある。また、連続して一致するマッチング形状を3点から増やすと[数5]に示した{}内の乗算の数が増えることから偶然に一致する確率は低くなり、こうすることでも、認証精度を高めることが可能である。さらに自明であるが、[数3]において、最初の1番目および3番目の点のみ一致する確率は、
【0055】
【数6】
【0056】
となり、偶然に一致する確率が高くなることが分かる。
【0057】
上記で図9を参照して説明した例では、一致ポリゴン3点形状として、一致ポリゴン数5個を閾値として、これ以上の一致がなければ認証が失敗したと判定している。なお、この閾値は認証対象の特性、すなわちどのような素材にどのような方法で印刷したのか等により最適な値を決定することができる。
【0058】
<実施例>
図1は、本発明の一実施形態における認証システムのシステム構成図である。本実施形態の認証システム100は、CPU101、ROM102、RAM103や各種外部とのインタフェースを備えた装置に、対象を読取るスキャナ110や、結果などを表示するディスプレイ120を接続できるようになっている。もちろん、本発明では、対象を読取るために何らかのスキャナが必要であるので、装置に内蔵することもできるし、その他の機能として結果を出力するプリンタを備えることもできるし、ネットワークに接続してデータベースと必要なデータのやり取りをすることもできる。具体的には、認証用の専用装置とすることもでき、カメラつき携帯電話やノートパソコン、あるいはパソコンにスキャナを接続するなど、本技術分野で知られた種々のシステム構成が可能である。
【0059】
図2は、本発明の一実施形態の機能ブロック図である。本実施形態では、ソフトウェアプログラムがCPU101上で実行され、本発明を達成するために必要な種々の機能が処理されるが、例えば図2に示すような機能ブロックごと処理することもできる。すなわち、対象をスキャンして画像を抽出する画像読取部201、得られた画像から個体差情報を算出する個体差情報算出部202、算出された個体差情報を比較する個体差情報比較部203および最終的に認証するかしないかを決定する判定部204などにより処理が実行される。本実施形態では、図2に示すような機能ブロックにより処理を実行するが、これに限られず、さらに機能ブロックを分割し、あるいは複数の機能ブロックを統合して異なる機能ブロックで処理を実行することもできる。
【0060】
本実施例の処理を図3、10ないし12を参照して説明する。ここで、本実施例は何らかの対象を、予め登録あるいは想定している対象と比較して、認証すなわち一致するか否かの判定を行うものであるから、本処理の前提として、既に説明した個体差情報が予め算出され、いずれかに記憶されているものとする。予め算出された個体差情報は、例えば、ROM102やRAM103などの装置内部のメモリに記憶しておいても良いし、外部の記憶装置やネットワークを介して取得することもできる。
【0061】
図3は、本発明の一実施形態の認証処理を示すフローチャートである。画像読取部201は、スキャナ110を用いて対象を読み取り画像データを出力する(S301)。読取に用いたスキャナ110は、予め個体差情報を算出するために使用された読取装置とは異なることが通常であるから、このようにして得られた画像データに一定の補正をかけ、読み取り差異がなくなるようにする(S302)。本実施例では、予め標準的な教示データを用いて個体差情報を算出するために使用する撮像機器等の位置補正、センサ受光色温度補正、ホワイトバランス補正、ISO感度補正、レンズの歪補正、色収差補正、集光補正、照明の光量補正、スペクトル補正、撮像機器のタイプによる変換などの解像を標準化するための補正値を取得しておき、この補正値を用いて構成されたフィルタを解像されたイメージデータに適用することにより、イメージデータの各ピクセル値を変換し、撮像機器構成などによらず一定の条件でイメージデータの読み取りを可能とするが、これに限られることなく記憶装置に記憶するなど別途補正値データをやり取りし、あるいはその他本技術分野で知られた方法によりイメージデータを生成することができる。
【0062】
次に、対象画像のうち通常は一部分を用いて認証することができる。図11は、本発明の一実施形態の具体的な応用例の抽出処理を説明するための図である。図11に示すように、対象となるのは何らかの製品に付されている表示ラベルであり、一種の印刷物である。このラベルのうちの適当に定められた一定のエリアを対象として画像を2回読み取り、得られた2つの画像からヒトフデガキ線画を生成する(S303)。次に、メモリ等から予め算出したヒトフデガキ線画を読み込み(S304)、図12に示すようにS303で生成されたヒトフデガキ線画と比較する(S305)。図12は、本発明の一実施形態の具体的な応用例の一致判定処理を説明するための図である。比較は、例えば上述したポリゴンによる連結比較法を用いて行い、一定の確率で一致が認められれば(S306)、認証成功を通知し(S307)、認められなければ認証の失敗を通知する(S308)。本実施例では表示ラベルの印刷部分を使用して認証判定したが、これに限られず本技術分野で知られたいずれの方法も用いることができる。例えば、目印としてラベルに予め印鑑を押下しておきその印影を対象とし使用することもでき、容器のいずれかの表面から色情報が読取れればそのようなデータを使用することもできる。
【0063】
本実施例では以下のような装置及び設定等により、医薬品ラベルを用いて個体差抽出および個体差認証の処理を行った。認証対象のラベルは、縦横の長さが44.0[mm]×74.0[mm] のフィルム基材ラベルとし、印刷時に、特別なインクを使用したり、特殊な加工は行ったりはしていない。ヒトフデガキ線画の形式はシーケンス式とし、撮像用機材は、1075 万画素のCCD デジタルカメラ、フォーカスはマニュアルフォーカス、感度はISO100、絞りはF = 8、シャッタースピードは1/20[s]、撮影画像サイズ(W×H)は3872×2592[pixel]に設定し、撮影回数は2回とした。
【0064】
具体的には、以下の手順で個体差特徴の抽出を行った。
(1)図11に示すように、対象のラベルを、撮影範囲が縦横15.5[mm]×23.2[mm] になるようにセットし、上記の条件により2回撮影し、2枚分のイメージデータを得る。
(2)得られた2枚のイメージデータをそれぞれ8.7[mm]×8.7[mm] のサイズでトリミングし、次式で定義する光情報差分D(x,y)を2枚のイメージデータより求める。イメージデータ1をg1(x,y)、イメージデータ2をg2(x,y)とする。 X,Yは、イメージデータのx座標、y座標の集合とする。
【0065】
【数7】
【0066】
ただし、g1R(x,y)は、g1(x,y)のRGB値のR成分を表しており、その他も同様である。
(3)次の条件で、ヒトフデガキ線画を生成する。不安定再現要素の連結順位は降順連結、連結最低距離は、62μm、不安定再現強度の閾値は10.0、連結数は250として、上記で得られた光情報差分から図11に示すヒトフデガキ線画1201を生成する。
(4)得られたヒトフデガキ線画1201を、認証対象の個体差特徴としてデータベースに付帯情報(使用した装置の設定、ヒトフデガキ線画生成条件など) と共に格納する。
(5)上記(1)と同条件で再度、対象を2回撮影し、同様に図12に示すようなヒトフデガキ線画1302を生成する。
(6)付帯情報にもとづいて、ヒトフデガキ線画をデータベースに照会し、データベースから呼び出したヒトフデガキ線画1201と、ここで求めたヒトフデガキ線画1302とを連結の先頭よりマッチングする。マッチング条件は、以下のように設定した。マッチング形状は、3点形状。一致判定最低形状数歯、4ポリゴン。
(7)マッチングの結果は図12に示すような認証結果1301となる。図12に示すように一致したポリゴン1303は一致形状数が26個で、4ポリゴン以上という条件を超えているので、登録したヒトフデガキ線画と同じ対象であると判定され、認証が成功したことが確認できる。
【0067】
図13ないし16は、本発明の一実施形態の具体的な別の応用例を説明するための図である。図13に示す例は、錠剤を対象とするものである。錠剤は、一般にその錠剤が何であるかを示すマークや名称などが表面に印刷されている。この印刷部分に本発明を用いて、錠剤1つ1つを個別に識別することができる。例えば、製造時に個体差情報を作成しておけば、どの工場のどのロットでいつ製造された錠剤かを一意に特定できることができ、様々な活用を期待することができる。また、錠剤表面自体から色情報を読取ることができれば、マーク等が印刷されていない錠剤でも本発明を用いて個体識別が可能となる。
【0068】
上述の医薬品ラベルと同様に具体的な認証処理を説明する。図13に示すように、錠剤は、縦横の長さが7.5[mm]×7.5[mm]の白地にグレーの刻印がある円形錠剤を使用した。これは一般的に購入できる市販薬である。撮像用機材は、上述の医薬品ラベルの例で用いたものと同じ機材とし、撮影条件は、シャッタースピードのみ1/50[s] とし、その他の値は同じ設定とした。また、撮影回数も同じ2回とした。
【0069】
以上の条件で下記のように個体差特徴の抽出を行った。
(1)対象の錠剤を、撮影範囲が縦横15.5[mm]×23.2[mm]になるようにセットし、上記の撮影条件により2回撮影し、2枚分のイメージデータを得る。
(2)2枚のイメージデータをそれぞれ、縦横4.2[mm]×3.5[mm] のサイズでトリミングし、上述の医薬品ラベルと同様にデジタル再現差を2枚のイメージデータより求める。
(3)連結イロメガネは、ヒトフデガキ線画形式:シーケンス式、連結順位;降順、連結最低距離:63μm、不安定再現強度の閾値:20.0、連結数:250とし、これによりヒトフデガキ線画を求める。求めたヒトフデガキ線画を図13に示す。
(4)求めたヒトフデガキ線画と付帯情報とをデータベースに格納し、認証登録を完了する。
(5)上記、(1)と同条件で再度、対象を2回撮影し、ヒトフデガキ線画を抽出する。
(6)同様に、データベースから呼び出したヒトフデガキ線画と今求めたものを連結の先頭よりマッチングをとる。マッチング条件は、マッチング形状:3点形状、一致判定最低形状数:5ポリゴンに設定した。
(7)マッチングの結果を図13に示す。一致形状数は13個であり、認証が成功したことを表している。
【0070】
図14に示す例は、日本酒やワインなどのラベルに、本発明を適用する例であるが、ラベルの特定部分を定めるため、例えば落款や印章の部分などを使用することもでき、予め読み取り場所を詳細に定めなくても、容易に読み取り領域を特定することができる。あるいはまた、本発明による認証に使用するために、印鑑を押下して表れた像を対象に読み取りを行って認証処理をすることもできる。
【0071】
図15に示す例では、レトルト食品の印刷部分を使用しているが、このように対象はどのような素材にどのような方法で印刷等されても、スキャナ等で読み取って画像を生成することができれば本発明に使用することができる。
【0072】
図16に示す例では、絵画の識別に本発明を用いているが、全体が印刷物であるため、どの部分を使用しても本発明を適用することができる。また、経年劣化が激しいこのような対象でも、一定の割合で一致する連結点が欠損せず保持されるため、認証精度を保つことが可能である。
【0073】
上述の実施例の中では、錠剤を除きいずれもどの領域を用いて認証するかを特定する必要があるが、本技術分野で知られた、例えば予め右端の部分であると決めておいたり、別途指定領域の情報を伝達したりするなどにより特定することができる。
【特許請求の範囲】
【請求項1】
デジタル撮像手段の走査により認証対象を解像して得られた複数のデジタルデータの特定された対応位置における光情報差分を算出し、前記デジタル撮像手段のピクセルサイズに対応する被写体における物理サイズにより算出された対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を、前記算出された光情報差分の大きい順に連結点として連結して生成される連結線を、前記対象を一意に特定する個体差情報として、該連結線を記憶する記憶手段と、
所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、当該得られた複数のデジタルデータを比較し、それぞれのデジタルデータが前記認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出手段と、
前記算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して対応位置における、前記記憶手段に記憶された個体差情報の連結線読み出して、当該読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、連結点の位置が含まれる重ね合わせたピクセルの物理面に対応するピクセルの光情報差分を算出して当該算出した光情報差分が、連結線の順序に対して、所定の関係にあると判定される場合は認証が成功したと判定する個体差情報抽出判定手段と
を備えることを特徴とする認証システム。
【請求項2】
前記デジタル撮像手段の構成条件はデジタル撮像手段の解像度を含み、前記デジタル撮像手段の解像度は、前記認証対象の画像を形成する粒子の大きさよりも低い解像度であることを特徴とする請求項1に記載の認証システム。
【請求項3】
前記変換値算出手段は、前記認証対象を連続して複数回走査することを特徴とする請求項1または2に記載の認証システム。
【請求項4】
予め設定された情報により、デジタル撮像手段の構成条件の相違によるイメージデータの相違を標準化するための補正を行う補正手段を更に備えたことを特徴とする請求項1ないし3のいずれかに記載の認証システム。
【請求項5】
前記記憶手段は、前記連結線の比較のためのパラメータ及び比較方法を含む連結比較設定をさらに記憶し、前記個体差情報抽出判定手段は、前記記憶手段に記憶された比較設定を用いて、前記読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、前記算出した光情報差分が、連結線の順序に対して前記比較設定に定められた所定の関係を有している場合は認証が成功したと判定することを特徴とする請求項1ないし4のいずれかに記載の認証システム。
【請求項6】
前記個体差情報抽出判定手段は、算出した光情報差分が、連結線の順序に対して、所定の数降順である場合は認証が成功したと判定することを特徴とする請求項1ないし5のいずれかに記載の認証システム。
【請求項7】
所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、当該得られた複数のデジタルデータを比較し、それぞれのデジタルデータが前記認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出ステップと、
前記算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して当該特定された対応位置における光情報差分を算出するステップと、
前記デジタル撮像手段の構成条件から前記デジタルデータのピクセルサイズに対応する被写体における物理サイズを算出し、当該算出された物理サイズにより、前記対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を連結点として算出し、前記算出した光情報差分の大きい順に、任意の回数降順に前記連結店を連結し連結線を個体差情報として抽出するステップと、
前記抽出された連結線を記憶手段に登録する登録ステップと
を備えることを特徴とする認証情報登録方法。
【請求項8】
デジタル撮像手段の走査により解像して得られた複数のデジタルデータの特定された対応位置における光情報差分を算出し、前記デジタル撮像手段のピクセルサイズに対応する被写体における物理サイズにより算出された対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を、前記算出された光情報差分の大きい順に物理位置の中点を連結点として連結して生成される連結線を、前記対象を一意に特定する個体差情報として、該連結線を生成した際の前記デジタル撮像手段の構成条件とともに記憶する記憶手段を備えた認証システムにおいて、
所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、当該得られた複数のデジタルデータを比較し、それぞれのデジタルデータが前記認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出ステップと、
前記算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して対応位置における、前記記憶手段に記憶された個体差情報の連結線読み出して、当該読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、連結点の位置が含まれる重ね合わせたピクセルの物理面に対応するピクセル光情報差分を算出して当該算出した光情報差分が、連結線の順序に対して、所定の関係にあると判定される場合は認証が成功したと判定する個体差情報抽出判定ステップと
を備えることを特徴とする照会方法。
【請求項1】
デジタル撮像手段の走査により認証対象を解像して得られた複数のデジタルデータの特定された対応位置における光情報差分を算出し、前記デジタル撮像手段のピクセルサイズに対応する被写体における物理サイズにより算出された対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を、前記算出された光情報差分の大きい順に連結点として連結して生成される連結線を、前記対象を一意に特定する個体差情報として、該連結線を記憶する記憶手段と、
所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、当該得られた複数のデジタルデータを比較し、それぞれのデジタルデータが前記認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出手段と、
前記算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して対応位置における、前記記憶手段に記憶された個体差情報の連結線読み出して、当該読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、連結点の位置が含まれる重ね合わせたピクセルの物理面に対応するピクセルの光情報差分を算出して当該算出した光情報差分が、連結線の順序に対して、所定の関係にあると判定される場合は認証が成功したと判定する個体差情報抽出判定手段と
を備えることを特徴とする認証システム。
【請求項2】
前記デジタル撮像手段の構成条件はデジタル撮像手段の解像度を含み、前記デジタル撮像手段の解像度は、前記認証対象の画像を形成する粒子の大きさよりも低い解像度であることを特徴とする請求項1に記載の認証システム。
【請求項3】
前記変換値算出手段は、前記認証対象を連続して複数回走査することを特徴とする請求項1または2に記載の認証システム。
【請求項4】
予め設定された情報により、デジタル撮像手段の構成条件の相違によるイメージデータの相違を標準化するための補正を行う補正手段を更に備えたことを特徴とする請求項1ないし3のいずれかに記載の認証システム。
【請求項5】
前記記憶手段は、前記連結線の比較のためのパラメータ及び比較方法を含む連結比較設定をさらに記憶し、前記個体差情報抽出判定手段は、前記記憶手段に記憶された比較設定を用いて、前記読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、前記算出した光情報差分が、連結線の順序に対して前記比較設定に定められた所定の関係を有している場合は認証が成功したと判定することを特徴とする請求項1ないし4のいずれかに記載の認証システム。
【請求項6】
前記個体差情報抽出判定手段は、算出した光情報差分が、連結線の順序に対して、所定の数降順である場合は認証が成功したと判定することを特徴とする請求項1ないし5のいずれかに記載の認証システム。
【請求項7】
所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、当該得られた複数のデジタルデータを比較し、それぞれのデジタルデータが前記認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出ステップと、
前記算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して当該特定された対応位置における光情報差分を算出するステップと、
前記デジタル撮像手段の構成条件から前記デジタルデータのピクセルサイズに対応する被写体における物理サイズを算出し、当該算出された物理サイズにより、前記対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を連結点として算出し、前記算出した光情報差分の大きい順に、任意の回数降順に前記連結店を連結し連結線を個体差情報として抽出するステップと、
前記抽出された連結線を記憶手段に登録する登録ステップと
を備えることを特徴とする認証情報登録方法。
【請求項8】
デジタル撮像手段の走査により解像して得られた複数のデジタルデータの特定された対応位置における光情報差分を算出し、前記デジタル撮像手段のピクセルサイズに対応する被写体における物理サイズにより算出された対応位置におけるピクセルの中心位置に対応する被写体の物理位置の中点を、前記算出された光情報差分の大きい順に物理位置の中点を連結点として連結して生成される連結線を、前記対象を一意に特定する個体差情報として、該連結線を生成した際の前記デジタル撮像手段の構成条件とともに記憶する記憶手段を備えた認証システムにおいて、
所定のデジタル撮像手段の構成条件において、デジタル撮像手段により認証対象を複数回走査してデジタルデータとして解像し、当該得られた複数のデジタルデータを比較し、それぞれのデジタルデータが前記認証対象を写像する位置を一致させるための移動及び回転変換を算出する変換値算出ステップと、
前記算出された移動及び回転変換を用いて複数のデジタルデータのそれぞれのピクセル配列の対応位置を特定して対応位置における、前記記憶手段に記憶された個体差情報の連結線読み出して、当該読み出された連結線上の連結点の位置を折れ線を辿るように追跡し、連結点の位置が含まれる重ね合わせたピクセルの物理面に対応するピクセル光情報差分を算出して当該算出した光情報差分が、連結線の順序に対して、所定の関係にあると判定される場合は認証が成功したと判定する個体差情報抽出判定ステップと
を備えることを特徴とする照会方法。
【図1】

【図2】
【図3】
【図17】
【図18】
【図19】
【図20】
【図21】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図22】
【図23】
【図2】
【図3】
【図17】
【図18】
【図19】
【図20】
【図21】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図22】
【図23】
【公開番号】特開2011−165095(P2011−165095A)
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願番号】特願2010−29528(P2010−29528)
【出願日】平成22年2月12日(2010.2.12)
【出願人】(502305722)
【Fターム(参考)】
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願日】平成22年2月12日(2010.2.12)
【出願人】(502305722)
【Fターム(参考)】
[ Back to top ]