
認識装置
【課題】認識対象である被検査体が動いているときでも、認識精度が高い認識装置を提供する。
【解決手段】被検査体の移動を一軸方向に限定されるように支持し、
被検査体検出手段(41)の第1のセンサ(9)、第2のセンサ(10)の順で
被検査体通過の検出を行い、算出した被検査体の移動速度から像ぶれ補正を行う際の電荷転送量(Pn)と電荷蓄積時間分割数(N)を決定し、像ぶれ補正を実施する。
【解決手段】被検査体の移動を一軸方向に限定されるように支持し、
被検査体検出手段(41)の第1のセンサ(9)、第2のセンサ(10)の順で
被検査体通過の検出を行い、算出した被検査体の移動速度から像ぶれ補正を行う際の電荷転送量(Pn)と電荷蓄積時間分割数(N)を決定し、像ぶれ補正を実施する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、CCDイメージセンサなどの固体撮像素子を用いた認識装置に関し、より詳細には、静止画向けの像ぶれ補正機能を有し、像ぶれを軽減した静止画撮像が可能な認識装置に関する。
【背景技術】
【0002】
近年情報処理の分野においては、本人認証を目的として個人の指紋などの生体情報をデジタル方式のカメラで撮像した画像に画像処理を施し、蓄積済みの他の指紋データと照合したり、本人の写真が載ったパスポートや2次元コードが貼付されたカード、文字が印刷された紙などの非生体情報を同じくデジタル方式のカメラで撮像し、撮像画像に画像処理を施すことにより情報認識を行っている。
【0003】
1次元のバーコードはラインセンサで認識が可能であるため1つのセル(白と黒のラインで表される2値データ)の検出のためには3×3画素以上の画像領域で可能であるが、より多くの情報を含有する2次元コードを認識するためにはコード領域全てを撮像することが必要となる。2次元コード認識や指紋認識、文字認識を行うには、認識に必要な領域の画像をCCDイメージセンサなどの固体撮像素子を用いて撮像する必要があり、撮像時に被写体となる被検査体としての指やカードが動いてしまうことにより、記録画像にぶれが発生して認識精度が低下することがあった。
【0004】
例えば、特許文献1に記載された認識装置は、ベルトコンベア上に搭載された被検査体としての製品などに貼付されたバーコードをCCDイメージセンサ(カメラ)で読み取ることにより製品の種類や仕向け先を判別するものであるが、ベルトコンベアが移動することに起因する記録画像ぶれを抑圧するため、ベルトコンベアの移動速度を高速とする場合は、認識精度は一定を確保しつつ製品の移動量に対する撮像面上に投影された製品像の移動量が最小となるように製品とカメラを遠ざけるように構成されている。
【0005】
【特許文献1】特開2001−167225号公報(第1−5頁、第1図)
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載された従来の認識装置では、読み取るコードは1次元バーコードであり、そのため、読み取り方向は横方向(白黒ラインと交差する方向)であって、認識領域は5画素幅以上の画像切り出し領域でよく、そのために被検査体としての製品とカメラを遠ざけることが可能であった。読み取りコードが2次元コードの場合は、読み取り方向は横方向と縦方向の2方向であるため、より多くの画像認識領域を必要とする。そのため、1次元バーコードを用いる場合に比べて、被検査体とカメラを近づける必要がある。被検査体とカメラを近づけると、像ぶれを抑制するためにベルトコンベアの移動速度を低速にする必要があり、設備の処理能力を低下させる原因となる。
【0007】
また、被検査体とカメラとを近づけることなく、ベルトコンベアの速度を高速に保つためには、CCDイメージセンサの画素数を増加させれば良いが、固体撮像素子変更によるコストの上昇と装置の大型化を伴う。
【0008】
本発明は上述したような課題を解決するためになされたものであり、特殊な機構やメモリを必要とせずに像ぶれ補正を実施することにより、小型で低コストの、非接触型の認識装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、
移動する被検査体が所定の撮像位置を通過するときに、該被検査体からの光を受けて光電変換を行う光電変換部と、前記光電変換部で生成された電荷を転送する転送部とを備えた固体撮像素子と、
前記被検査体が前記撮像位置に達する前に順に通過する第1の位置及び第2の位置において、前記被検査体の通過を検出する被検査体検出手段と、
前記被検査体検出手段より検出した第1の位置の検出信号及び第2の位置の検出信号をもとに、前記固体撮像素子の撮像面上での像ぶれ量を推定し、像ぶれ補正を行うタイミングを決定する演算制御手段と、
前記推定された像ぶれ量に応じて該像ぶれを打ち消すように、前記光電変換部で生成された電荷を前記転送部内で転送させながら、電荷蓄積を行っての画像電荷を形成させる撮像素子駆動手段とを備えた
ことを特徴とする認識装置を提供する。
【発明の効果】
【0010】
本発明によれば、特殊な機構やメモリを必要とせずに固体撮像素子内で像ぶれ補正を実施することにより小型で低コスト、かつ精度の高い認識装置を提供することが可能となる。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
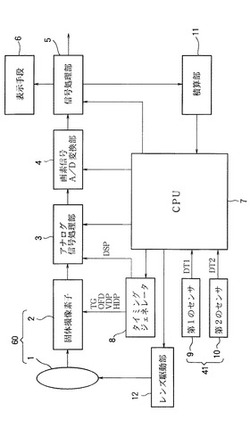
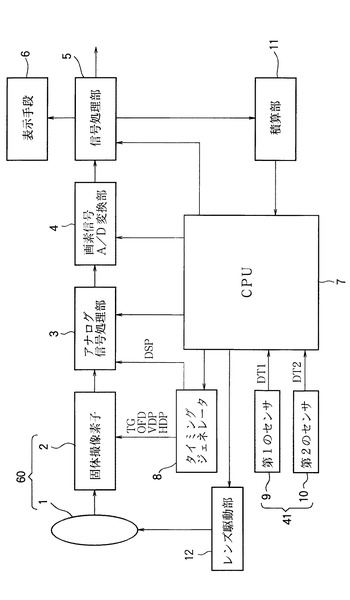
図1は、本発明の実施の形態1における認識装置の基本構成を示す図である。図1に示すように、この認識装置は、非接触型のものであり、レンズ1と、固体撮像素子2と、アナログ信号処理部3と、画素信号A/D変換部4と、信号処理部5と、表示手段6と、CPU7と、タイミングジェネレータ8と、第1のセンサ9と、第2のセンサ10と、積算部11と、レンズ駆動部12とを有する。
【0012】
レンズ1と固体撮像素子2とで撮像部60が構成される。レンズ1を通して入射した被検査体の光学像(被写体像)は固体撮像素子2で光電変換される。このレンズ1は焦点距離が可変なズームレンズとして機能する。レンズ駆動部12からの制御信号によって、レンズ1は光軸1x上で前後へ移動し、焦点距離を連続的に変えることができる。この制御信号はCPU7から出力される。
【0013】
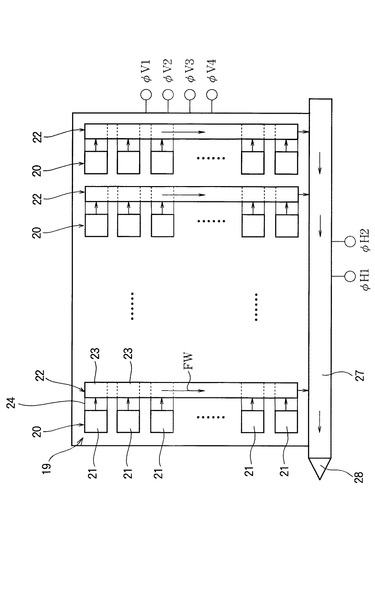
固体撮像素子2は、例えばCCDイメージセンサで構成され、図2に示すように、複数の光電変換素子列20を有する光電変換部19と、それぞれ光電変換素子列20に対応し、光電変換素子列20に隣接して設けられた複数の垂直転送部22と、光電変換素子列20と垂直転送部22の間に位置する読み出しゲート部24と、水平転送部27と、出力増幅器28とを有する。
各光電変換素子列20は、撮像画面上の第1の方向、例えば垂直方向に列をなす複数の画素位置に配置され、被検査体からの光を、レンズ1を介して受けて、光電変換を行なう複数の光電変換素子21を有する。
【0014】
各垂直転送部22は、対応する光電変換素子列20の光電変換素子21にそれぞれ対応して設けられ、対応する光電変換素子21で蓄積された電荷が、読み出しゲート部24のそれぞれの読み出しゲート25を介して転送され、かつ相互間で垂直方向に電荷の転送を行う複数の転送素子23から成る。
水平転送部27は、垂直転送部22で転送され、垂直転送部22から出力された電荷を受けて、第1の方向と直交する第2の方向、例えば水平方向に転送する。
出力増幅器28は、水平転送部27を転送され、水平転送部27から出力された電荷を増幅して出力する。
【0015】
光電変換部19の光電変換素子21における光電変換によって、光の強さに応じた量の電荷が蓄積され、読み出しパルスTGによって、電荷が読み出しゲート部24を介して垂直転送部22に取り出され、4相のパルスφV1、φV2、φV3、φV4から成る垂直転送パルスVDPによって水平転送部27方向へ逐次転送される。水平転送部27では1ライン分の画素が入るたびに2相のパルスφH1、φH2から成る水平転送パルスHDPによって水平方向に電荷の転送を行ない、出力増幅器28で信号電圧に変換して信号を出力する。
【0016】
本願では簡単のため、垂直転送部22内の転送を単に「垂直転送」と言い、水平転送部27内の転送を単に「水平転送」と言うことがある。
【0017】
上記の垂直転送パルスVDPによって、垂直転送部22内の電荷を水平転送部27に向けた方向(図2の垂直転送部22内の矢印FWの方向。以下「順方向」と呼ぶことがある)へ転送するだけではなく、水平転送部27とは反対の方向(図2の垂直転送部22内の矢印FWと反対方向。以下「逆方向」と呼ぶことがある)へ転送することも可能である。また、垂直転送パルスVDPを印加しない時は、垂直転送部22は読み出しゲート部24を介して垂直転送部22に取り出された電荷を、垂直転送部22内で順方向にも逆方向にも移動させず、取り出された位置に保持することができる。
【0018】
垂直転送部22の各転送素子23は、内部に保持されている電荷と、対応する光電変換素子21から転送される電荷とを加算する。
【0019】
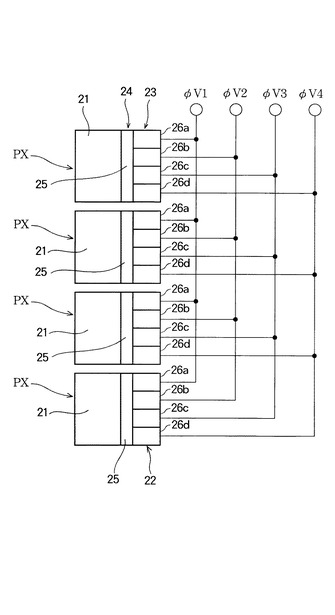
図3は、図2における縦方向に並んだ4画素を拡大して示す図である。符号PXは一つの画素を示す。各画素は、光電変換素子21、読み出しゲート25ならびに転送素子23を備える。本実施の形態では4相の垂直転送パルスVDPを用いており、1画素あたり4個の電極26a〜26dが存在する。光電変換素子21にて光電変換されて蓄積された電荷は、読み出しゲート25を介して転送素子23に読み出される。以下に述べるように、4相の垂直転送パルスVDPの電圧を所定の時系列で変化させることにより、垂直転送部22内の電荷を所望の画素数分だけ順方向にも、逆方向にも転送することができる。
【0020】
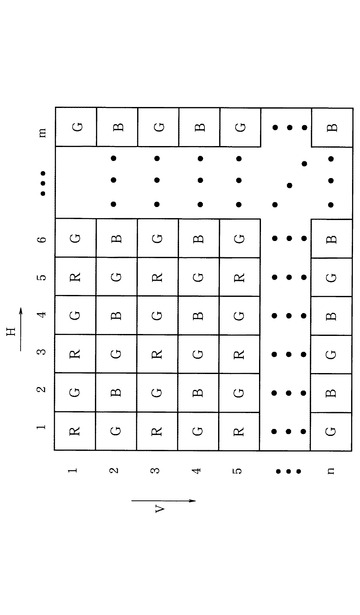
固体撮像素子2は色フィルタを備えない白黒センサであっても良く、また、例えば図4に示すベイヤ型に配置された色ファイルタを備えたカラーセンサであってもよい。色ファイルタを備えたカラーセンサでは、固体撮像素子の光電変換部19の光電変換素子21は、それぞれ異なる色の色フィルタで覆われ、該色フィルタが所定の繰り返しパターンで周期的に配列されている。ベイヤ型の色フィルタは、赤(R)、緑(G)、青(B)の色フィルタであり、R、G、Bの色フィルタで覆われた光電変換素子からは、R、G、Bの画素信号が得られる。図4で、符号Hは、撮像画面上の横軸、即ち水平方向軸を示し、水平方向軸に沿う1、2、…mは水平方向軸上の座標値を表し、符号Vは、撮像画面上の縦軸、即ち垂直方向軸を示し、垂直方向軸に沿う1、2、…nは垂直方向軸上の座標値を表す。
【0021】
ベイヤ型配列の場合には、図4に示すように、緑Gが市松状に配置され、その他の部分に赤R及び青Bが線順次に配置されている。例えば図4の3列目(H=3)に注目すると、その画素の並びは上から下に向かってR、G、R、G、・・・、Gのようになっており、R画素、G画素ともに1画素おきに並んでいる。
【0022】
そのため、後述のように分割した電荷蓄積期間(「分割蓄積期間」と言う)ごとに垂直転送部22内で電荷を移動する際の移動量が順方向または逆方向に奇数画素分である場合、例えば移動させたR画素の電荷にG画素の電荷を加算することになったり、移動させたG画素の電荷にR画素の電荷を加算することになり、適切ではない。同じ色の画素の信号電荷同士を加算するためには、電荷の移動量を偶数画素分とする必要がある。そのため、本発明では上記したように、分割蓄積期間ごとの電荷移動量を色フィルタの繰り返しパターンの周期に対応する最小画素数としている。固体撮像素子2として色フィルタを備えない白黒センサを用いる場合は分割蓄積期間ごとの電荷移動量は1画素(1ライン)となる。
【0023】
再び図1を参照し、固体撮像素子2として色フィルタを備えたカラー型のものを使用した場合の信号処理系統について述べる。固体撮像素子2から得られるR、G、Bの出力信号(画素信号)は、アナログ信号処理部3において、相関二重サンプリング処理(CDS)ならびに自動利得制御増幅処理(AGC)が施される。
固体撮像素子2に供給される、読み出しパルスTG、垂直転送パルスVDP、及び水平転送パルスHDP、並びに後述のオーバーフロードレインパルスOFD(これらを総称して「固体撮像素子の駆動用パルス」と呼ぶことがある)、並びにアナログ信号処理部3に供給されるCDSのためのサンプリングパルスDSPは、タイミングジェネレータ8によって供給される。これらのパルスの発生のタイミングは、CPU7によって制御される。また、アナログ信号処理部3におけるAGCも、CPU7からの制御信号によって行われる。
【0024】
アナログ信号処理部3の出力信号は、画素信号A/D変換部4にてデジタル信号に変換された後、信号処理部5にて映像信号処理され、表示手段6において表示可能な映像信号になる。信号処理部5では、RGB信号から輝度色差信号(YCbCr)への変換、ホワイトバランス補正、γ(ガンマ)補正、色補間処理および輪郭強調補正等の画像処理が行われる。LCDなどで構成された表示手段6は、信号処理部5から出力された映像信号を表示する。
認識装置の設置や調整に際し、作業者(調整者)は、表示手段6に映る被検査体の画像を見ながら固体撮像素子2の配置やレンズ1の焦点距離などを決める。
【0025】
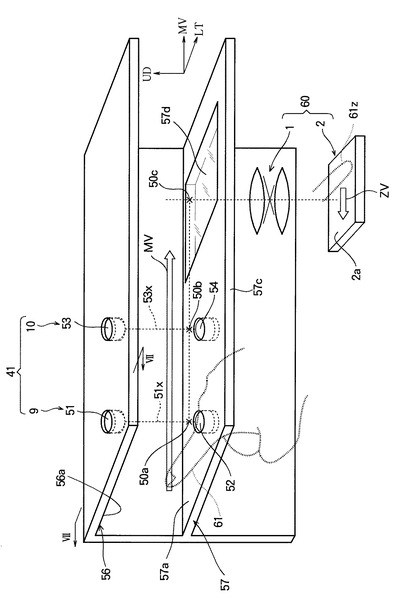
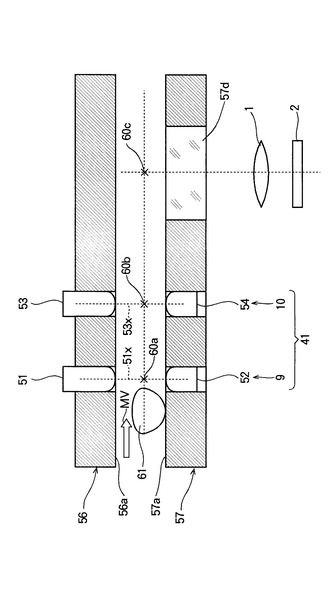
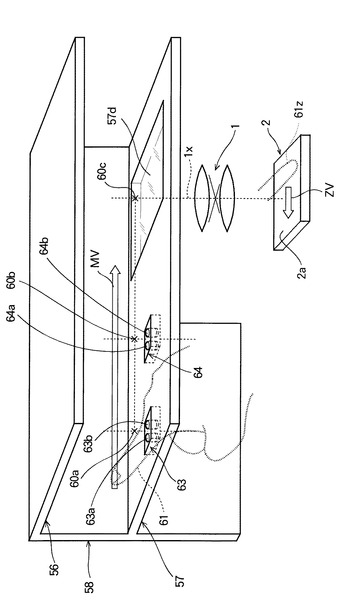
第1及び第2のセンサ9及び10並びに撮像部60は、例えば図5,図6、図7及び図8のように配置されている。図5は斜視図、図6は図5の線50に沿う垂直断面図、図7は、図5のVII−VII線断面図である。図8は部材相互間の距離を示すための概略平面図である。図示の例では、第1のセンサ9は、発光部51と発光部51が発する光を受けるように配置された受光部52とから成る透過型フォトセンサ(フォトインタラプタ)で構成され、第2のセンサ10は、発光部53と発光部53が発する光を受けるように配置された受光部54とから成る透過型フォトセンサ(フォトインタラプタ)で構成されている。
【0026】
発光部51及び53は、例えば発光ダイオード、例えば赤外線発光ダイオードで構成され、受光部52及び54は、例えばフォトトランジスタ、例えば赤外線発光ダイオード51,53が発生する光の波長域に感度を有するフォトトランジスタで構成されている。
【0027】
発光部51、53は例えば図5及び図6に示すように第1の保持板56に保持されて、下向きに光を発するように配置され、受光部52,54は第1の保持板56の下側に第1の保持板56に平行に配設された第2の保持板57に保持されて、上からの光を受けるように配置されている。
【0028】
第1の保持板56の後側の縁56bと第2の保持板57の後側の縁57bは、垂直に延びた第3の保持板58に固定され、第3の保持板58により連結されている。
第2の保持板57の手前の縁57cは、第3の保持板58に平行に形成されて、第2の保持板57の上面57aにあって、該第1の保持板56の後側及び前側の縁56b及び56cに平行な線50の第1の点(第1の位置)50aを、第1の発光部51から発して第1の受光部52に受けられる、光軸51xに沿う光束が通過し、上記の線50上の第2の点(第2の位置)50bを、第2の発光部53から発して第2の受光部54に受けられる、光軸52xに沿う光束が通過する。さらに上記線50上の第3の点(第3の位置)50cを、撮像部60の光軸1x、即ちレンズ1の光軸1xが通過する。言い換えると、レンズ1の光軸1xは、第1の受光部52を始点として、第2の受光部54を終点とするベクトルの延長線上の点(撮像位置)50cを通るものであり、被検査体61は撮像位置50cを通過するときに固体撮像素子2により撮像されて、固体撮像素子2の撮像面2a上に被写体像61zが形成される。被検査体61が矢印MVの方向に移動すると、これに伴い撮像面2a上で被写体像61zが矢印ZVの方向(矢印MVと反対の方向)に移動する。
【0029】
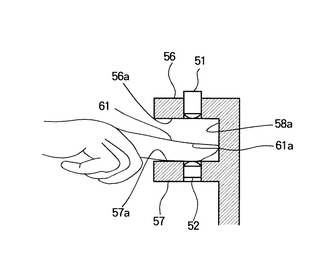
被検査体61は例えば人の手の指、例えば人さし指(第二指)であり、第二指が、第1の保持板56と第2の保持板57の間を矢印MVで示す方向に移動可能であり、また、第1の保持板56と第2の保持板57は指一本を通過させるだけの間隔で配設されており、従って指61の上下方向UDの動きが規制されている。また、図7に示されるように、指先61aが、第3の保持板58の前側の面58aに当接し、これにより指61の前後方向LTの動きが規制されている。
【0030】
このように、第1、第2及び第3の保持板56、57及び58は、被検査体としての指の動きを一軸方向に、即ち、第1の位置50aを始点として、第2の点50bを終点とするベクトルと平行な方向に、制限し案内する手段としての機能を有する。
【0031】
被検査体が第1の受光部52の位置(第1の位置)、第2の受光部54の位置(第2の位置)の順に通過し、その後レンズ1の光軸1x上の位置(撮像位置)50cまで移動したときに被検査体を撮像する。撮像を可能にするため、第2の保持板57のうちの、レンズ1の光軸1xの周囲の部分は、透明な板57dで形成されている。なお、透明な板57dとする代わりに、開口を設けても良い。
【0032】
第1のセンサ9と第2のセンサ10とで、後に図9を参照して詳しく説明する被検査体検出手段41が構成される。
【0033】
CPU7は本撮像システムを総括して制御を行うとともに、各種演算を実施する手段として機能している。信号処理部5からの映像信号データに基づき、自動露光制御(AE)/自動ホワイトバランス制御(AWB)を行うとともに、アナログ信号処理部3に対する増幅利得の設定、タイミングジェネレータ8で生成される固体撮像素子2の駆動用パルスの発生の制御、ならびにレンズ駆動部12の制御信号の生成を行う。
【0034】
積算部11は、信号処理部5から入力される1画面分の映像信号の積算を行う。積算結果は、撮像画像の明るさを表すものであり、CPU7はこれに基づいて、オーバーフロードレインパルスOFDの生成を制御し、これにより電荷蓄積時間の制御を行う。
【0035】
CPU7はさらに、図9に示す演算手段42a及び42bの機能をも有する。
演算手段42aは、被検査体検出手段41で被検査体の通過を検出すると、被検査体の第1及び第2のセンサ9、10間の通過時間(通過時間差)を算出し、撮像位置50cにおける被検査体の移動速度を推定する。例えば、第1及び第2のセンサ9,10間の距離を通過時間で割ることにより得られる第1及び第2のセンサ9,10間の平均移動速度を、撮像位置50cにおける移動速度と推定する。
被検査体検出手段41と演算手段42aとで、撮像位置50cにおける被検査体の移動速度を推定する速度推定手段43が構成されている。
演算手段42bは、推定された移動速度が高いほど像ぶれ補正を行うフレーム期間の電荷蓄積時間の分割数Nを多くするよう制御するとともに、像ぶれ補正を開始するタイミングを決定する。このため、第2のセンサ10の位置(第2の位置)から撮像位置50cまでの距離を上記平均移動速度で割ることにより前記被検査体が第2の位置から撮像位置50cに移動する時間を求め、この時間を、被検査体が第2の位置を通過した時刻(タイミング)に加算することにより、被検査体61が撮像位置50cを通過する時刻(タイミング)を推定し、このタイミングよりも、推定誤差や固体撮像素子の動作の遅れを考慮した時間余裕分以上前の始まるフレーム期間のタイミングを像ぶれ補正を開始するタイミングと決定する。このような制御により、被検査体の推定移動速度が高いほど、被検査体が第2のセンサ10を通過してから像ぶれ補正を行うまでの時間は短くされる。
【0036】
CPU7(演算手段42b)は決定された像ぶれ補正を行うタイミング、並びに像ぶれ補正における電荷蓄積時間の分割回数及び転送量に基づき制御信号を生成する。タイミングジェネレータ8は、図9に示すタイミング生成手段44として機能するものであり、CPU7が生成する制御信号に基づき、垂直転送部22(図2参照)内で電荷を移動させるための垂直転送パルスVDP、水平転送パルスHDP、読み出しパルスTGを生成し、固体撮像素子2へ出力し、垂直転送部22(図9の電荷移動手段45)を制御する。
【0037】
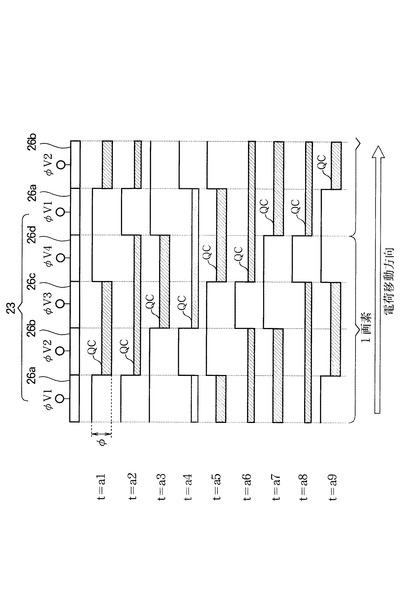
図2及び図3に示される、固体撮像素子2の垂直転送部22内の電荷を順方向に転送する具体的な手法を、垂直転送パルスVDPの電位変化のタイミングチャートである図10および図11を用いて説明する。図10は、各電極の垂直転送パルスVDPの4相のパルスφVi(i=1、2、3、4)のタイミングチャートであり、横軸に時刻を、縦軸に4つの電極26a〜26dに与えられる電位を並べて示している。図11は、図10に示す垂直転送パルスVDPを各電極に与えた時の、電荷移動の様子を示す図である。図11において、横軸は垂直転送部22の転送素子23の電極26a〜26dの位置を示し、縦軸には各電極の電子のポテンシャルエネルギーφi(=−eφVi)と電荷QCの分布の経時変化(異なる時刻t=a1乃至a9における電荷分布)が示してある。
【0038】
次に動作を説明する。図10において、時刻a1では電極26bの電位φV2と電極26cの電位φV3が+Vであり、電極26aの電位φV1と電極26dの電位φV4が0Vであるため、図11に示すように、電極26bと電極26cに電位井戸が形成されて電荷QCが蓄積される。次に時刻a2にて電極26dにバイアス電圧+Vを印加すると、電極26bと電極26cにあった電荷QCは、電極26bから電極26dに拡散する。次に時刻a3にて電極26bを無バイアスにすると、電荷QCは電極26cから電極26dに収束し、結果として、時刻a1からa3において、電荷QCは順方向(図11において右方向)へ1電極分だけ移動したことになる。
【0039】
時刻a4では電極26aにバイアス電圧+Vを印加し、時刻a5で電極26cを無バイアスにすることにより、電荷QCはさらに1つの電極分だけ順方向に移動する。時刻a6では電極26bにバイアス電圧+Vを印加し、時刻a7で電極26dを無バイアスにすることにより、電荷QCはさらに1つの電極分だけ順方向へ移動する。時刻a8では電極26cにバイアス電圧+Vを印加し、時刻a9で電極26aを無バイアスにすることにより時刻a1の状態と同じになる。すなわち、時刻a1から時刻a9において、1画素分電荷QCを順方向へ移動したことになる。
【0040】
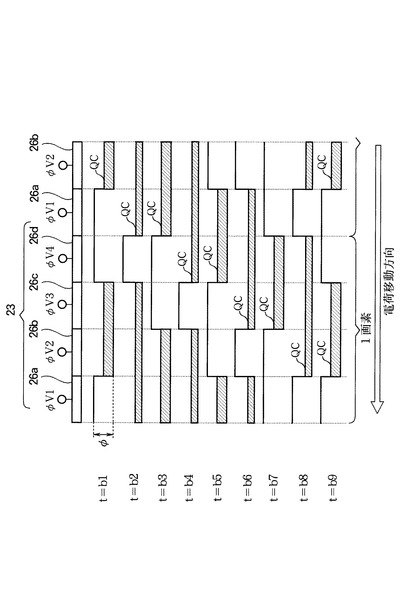
他方、垂直転送部内の電荷QCを逆方向に転送する場合に関して、図12および図13を用いて説明する。電荷QCを順方向に転送する場合の説明に用いた図10が図12に、図11が図13にそれぞれ対応している。また、時刻a1からa9は、b1からb9にそれぞれ対応している。
【0041】
次に動作を説明する。図12において、時刻b1では電極26bと電極26cにバイアス電圧+Vが掛かり、電極26aと電極26dは無バイアスで0Vであるため、図13に示すように、電極26bと電極26cに電位井戸が形成されて電荷QCが蓄積されている。次に時刻b2にて電極26aにバイアス電圧+Vを印加すると、電極26bと電極26cにあった電荷QCは、電極26aから電極26cに拡散する。次に時刻b3にて電極26cを無バイアスにすると、電荷QCは電極26aから電極26bに収束し、結果として、時刻b1からb3において、電荷QCは逆方向(図13において左方向)へ1電極分だけ移動したことになる。
【0042】
時刻b4では電極26dにバイアス電圧+Vを印加し、時刻b5で電極26bを無バイアスにすることにより、電荷QCはさらに1つの電極分だけ逆方向に移動する。時刻b6では電極26cにバイアス電圧+Vを印加し、時刻b7で電極26aを無バイアスにすることにより、電荷QCはさらに1つの電極分だけ逆方向へ移動する。時刻b8では電極26bにバイアス電圧+Vを印加し、時刻b9で電極26dを無バイアスにすることにより時刻b1の状態と同じになる。すなわち、時刻b1から時刻b9において、1画素分電荷を逆方向へ移動したことになる。
【0043】
本実施の形態においては、上述したように、電荷の拡散ステップ後に収束ステップを行ない、これを繰り返すことで電荷の転送を実現しているが、拡散と収束のステップを同時に行なっても電荷の転送は可能である。例えば、図11の時刻a2の拡散と時刻a3の収束を同時に行なう、すなわち電極26dへのバイアス電圧印加と電極26bの無バイアス化を同時に行なうことによっても同様の電荷の転送は達成できる。あるいは、図11において時刻a3の収束と時刻a4の拡散を同時に行なっても、同様に電荷の転送が可能である。
【0044】
さらに、本実施の形態では4相の垂直転送パルスVDPによって電荷を転送しているが、4相に限るものではなく、3相以上であれば、同様の方法により電荷の転送は可能である。同様に水平転送パルスHDPについても2相のものを用いているがこれに限るものではない。
【0045】
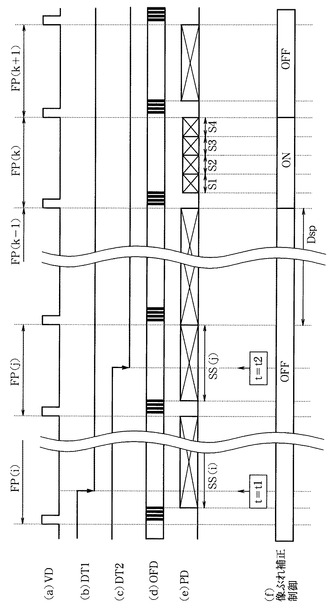
図14(a)〜(f)、図15(a)〜(f)及び図16(a)〜(f)は本実施の形態における認識装置の動作を示すタイミングチャートであり、読み出し回数(電荷蓄積期間の分割数)Nが4である場合を示している。
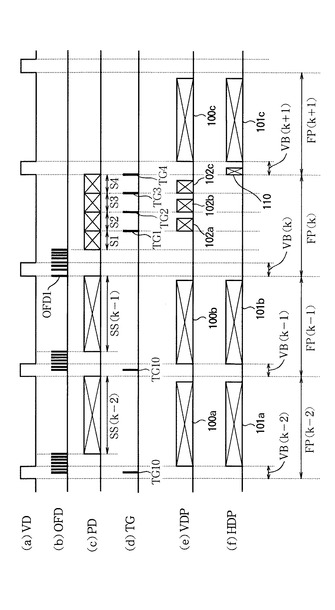
図15(a)〜(f)は、図14(a)〜(f)のうちの電荷蓄積期間の分割による像ぶれ補正を行うフレーム及びその直前のフレームをより詳細に示し、図16(a)〜(f)は、図15(a)〜(f)において、の電荷蓄積期間の分割による像ぶれ補正を行うフレーム期間を時間軸方向に拡大して示す。
【0046】
図14(a)、図15(a)及び図16(a)は垂直同期信号VDを示す。図14(b)は第1のセンサ9の出力信号DT1を示し、図14(c)は第2のセンサ10の出力信号DT2を示す。
【0047】
図14(d)、図15(b)及び図16(b)のオーバーフロードレインパルスOFDは水平同期信号に同期してタイミングジェネレータ8から固体撮像素子2のオーバーフロードレイン電極(図示されていない)に印加されるものであり、AE制御において電荷蓄積期間を調整するために光電変換素子21に蓄積された電荷を固体撮像素子2内の基板上に排出することにより電子シャッタ機能を実現するものである。なお、図15(b)のオーバーフロードレインパルスOFDのうち、図15(b)に示される最初のパルスOFD1(垂直同期信号VDの立ち上がりと同時又はその直後に(立ち上がりの後最初に)発生されるもの)以外のパルスを、電子シャッタパルスと呼ぶこともある。
【0048】
図14(e)、図15(c)及び図16(c)は光電変換素子21において光電変換ならびに電荷蓄積を行う期間PDを示している。この期間PD(図14(e)及び図15(c)においてそれぞれ符号SS(i)、SS(j)、SS(k−2)、SS(k−1)などで示されている)は、各フレーム期間において、オーバーフロードレインパルスOFDの発生が終わった後に開始され、次の垂直同期信号VDの立ち上がりまで続く。言い換えると、電荷蓄積期間が与えられた長さとなるように、オーバーフロードレインパルスOFDの列の発生を終了する時点が決められる。
図14(f)は、電荷蓄積期間の分割により像ぶれ補正を行うフレームと行われないフレームをそれぞれ「ON」、「OFF」で示す。
【0049】
図15(d)及び図16(d)は読み出しパルスTGを示す。この読み出しパルスTGは、光電変換素子21で蓄積した電荷を垂直転送部22の対応する転送素子23へ読み出す(転送する)ため、読み出しゲート25の制御に用いられる。
図15(e)及び図16(e)は垂直転送パルスVDP(φV1〜φV4を示し、図15(f)及び図16(f)は水平転送パルスHDP(φH1、φH2)を示している。
【0050】
像ぶれ補正を行うフレーム期間(図中の第3のフレームFP(k))の1つ前までのフレーム期間では、被写体(被検査体がまだ撮像位置に到達していない状態では、被検査体が通過する位置の背後にあるものが被写体となっている)の明るさに基づいて、露出条件の一つとして定められる電荷蓄積期間SSi(i=1、2、…)を設定して、撮像を行う。例えば図15(a)〜(f)に示すように、ある垂直同期信号VDが発生される第1の垂直ブランキング期間VB(k−2)で始まるフレーム(第1のフレームFP(k−2))内の電荷蓄積期間SS(k−2)に蓄積した電荷は、当該第1のフレームFP(k−2)の次のフレーム(第2のフレーム(FP(k−1))の先頭の垂直ブランキング期間VB(k−1)内に発生される読み出しパルスTG10によって垂直転送部22へ読み出され、上記第2のフレームFP(k−1)内の期間100bに垂直転送部22内で水平転送部27に向けて転送される。複数の垂直転送部22内で同時に水平転送部27に向けた転送が行われる。撮像面上の水平方向に整列した複数の画素、即ち同じライン上の複数の画素をそれぞれ構成する複数の光電変換素子21から読み出された信号電荷が同時に、それぞれの垂直転送部22により転送される。言換えると、光電変換部20のそれぞれの光電変換素子列21から垂直転送部22に転送された信号電荷は水平転送部27へ向けて1ラインずつ順々に転送される。そして、同じ第2のフレーム期間FP(k−1)内において、垂直転送部22から水平転送部27に転送された電荷が、期間101bにおいて、水平転送部27内を出力増幅器28に向けて転送され、出力増幅器28で増幅されて出力される。
【0051】
第2のフレーム期間FP(k−1)の次のフレーム期間(第3のフレーム期間FP(k))において、像ぶれ補正を行うものとすると、第2のフレーム期間FP(k−1)内の電荷蓄積期間SS(k−1)に蓄積された電荷は、次の垂直ブランキング期間VB(k)の最初(垂直同期信号VDの立ち上がりと略同時)にオーバーフロードレインパルスOFD1を固体撮像素子2へ印加することにより垂直転送部22へ転送されることなく基板上に排出される。なお、垂直ブランキング期間内において、AE制御により電子シャッタパルス(OFD1以外のオーバーフロードレインパルスOFD)が発生される場合は、オーバーフロードレインパルスOFD1は必ずしも必要ではない。読み出しパルス(垂直ブランキング期間VB(k−1)内のTG10のごときもの)の発生を禁止すれば垂直転送部22への信号電荷の読み出しが禁止されるので、AE制御による電子シャッタパルスの発生の時点で、蓄積された電荷が基板上に排出されるためである。
【0052】
フレーム期間FP(k)は、静止画像として記録する画像用の映像信号を得るための電荷蓄積を行う期間である。このフレーム期間FP(k)において電荷蓄積期間を複数個(N個)の期間(分割蓄積期間)に分割して分割蓄積期間ごとに垂直転送部22への電荷読み出しを行うことにより電荷が複数回(N回)に分けて読み出される。各回に読み出される1画面分の電荷の集合を便宜上「画像」或いは「電荷画像」と呼ぶことがある。
【0053】
該複数の画像は最終的に1枚の画像に合成されて固体撮像素子から出力されるが、それまでは前記複数の画像を構成する画像のうち、第1の分割蓄積期間に読み出した画像(第1の画像)を垂直転送部22内に一時保持した後、第2の分割蓄積期間に読み出した画像(第2の画像)を垂直転送部22に読み出すまでの間に、色フィルタを備えた固体撮像素子2を用いる場合は、前記第1の画像を色フィルタの繰り返しパターンの周期に対応する最小画素数だけ移動させ(転送させ)、色フィルタを備えない固体撮像素子2を用いる場合は1以上の整数画素数だけ移動させる。その後該画像に前記第2の分割蓄積期間に読み出した画像(第2の画像)と加算した後一時保持する。それ以降同様の処理を繰り返し、最後に読み出す画像(第Nの画像)を加算するまで繰り返す。
【0054】
読み出し回数Nは演算手段42b(CPU7で構成される)により決定される。演算手段42bは、演算手段42aで求められた、撮像位置50cにおける被検査体の推定移動速度に応じて像ぶれを補正するための電荷移動量と読み出し回数Nを決定するものであり、画素数を単位とする、固体撮像素子2の撮像面上の被検査体の移動量(画素数で表された、推定された移動速度に比例する)をPn、分割蓄積期間ごとに垂直転送部22内で電荷を転送する量(画素数で表された転送量)をPTとすると、N=Pn/PTと表わされる。固体撮像素子2の撮像面上の被写体像の移動量Pnが大きいほど、また分割蓄積期間ごとの電荷転送量PTが小さいほど、読み出し回数Nの値は大きくなる。例えば、Pnが一定であれば、分割蓄積期間ごとの電荷転送量を、色フィルタの繰り返しパターンの周期に対応する最小画素数(以後、PT(m)ということもある)とすることにより、読み出し回数Nは最大となる。例えば、色フィルタとして図4に示すベイヤ型のものを使用した場合、PT(m)は2(画素)である。この場合、動き検出手段32で検出された固体撮像素子2上の被検査体の移動量Pnが8画素に相当するときには、読み出し回数N(=Pn/PT)は4となる。色フィルタを備えない白黒の固体撮像素子の場合はPT(m)=1であり、このとき読み出し回数Nは8となる。
【0055】
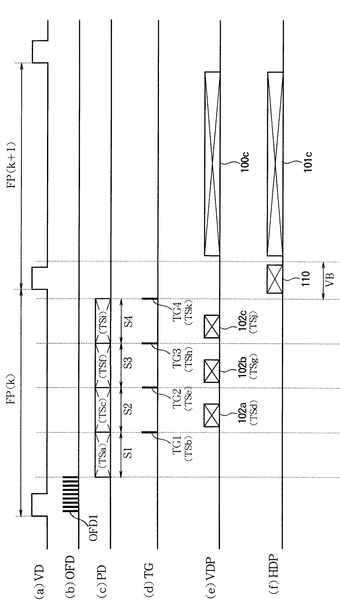
読み出し回数(電荷蓄積期間の分割数)N=4である場合において、図15(c)及び図16(c)に示すように、1つの電荷蓄積期間を等分に分割した期間(分割蓄積期間)をそれぞれS1〜S4とする。この場合、分割蓄積期間S1〜S4で蓄積した電荷をそれぞれ読み出しパルスTG1〜TG4(図15(d)及び図16(d))にて垂直転送部22へ読み出している。図15(e)及び図16(e)の符号102a〜102cは、それぞれ読み出しパルスTG1〜TG3にて読み出した電荷をそれぞれ垂直転送部22内で順方向または逆方向へ所定の画素数分だけ転送する期間を示す。
【0056】
図15(e)及び図16(e)のように符号102a〜102cで表される3つの電荷転送期間がある場合、それぞれの期間において全像ぶれ量の1/4に比例して電荷転送を行うため、該3つの電荷転送期間の合計として全像ぶれ量の3/4を補正する。ただし全像ぶれ量の1/4はそのまま残るため、結果として像ぶれが1/4に軽減されたことになる。一般的に、電荷蓄積期間の分割数をNとすれば、像ぶれを1/Nに軽減することができる。
【0057】
即ち、読み出し回数(電荷蓄積期間の分割数)Nが大きいほど、像ぶれ補正効果も大きくなる。動き検出手段32で検出された一定の動き量Pnに対して、Nを最大とするためには、分割蓄積期間ごとの電荷転送量PTが最小であればよい。そのため本実施の形態では、垂直転送部22内で電荷を転送する画素数(分割蓄積期間ごとの電荷転送量)について、色フィルタを備えたカラーの固体撮像素子を用いる場合は、色フィルタの繰り返しパターンの周期に対応する画素数の最小値PT(m)、色フィルタを備えない白黒の固体撮像素子を用いる場合は1画素とする。
【0058】
通常、本実施の形態のような像ぶれ補正によらずに記録画像の像ぶれを1/2に軽減するためには、露光の絞りを1段開く(F値を1段階大きな値に設定する)、言い換えれば固体撮像素子に取り込む光量を2倍にして電荷蓄積期間(シャッタースピード)を1/2にすることで可能となるが、本実施の形態では露光の絞りを1段開くことなしに像ぶれを1/2に軽減できる。
一般的に、電荷蓄積期間の分割数をNとした場合は、N回の画像の読み出しを行い、N枚の画像の合成を行うことにより、露光の絞りをlog2N段大きくしたのと同等の補正効果を期待できる。
【0059】
なお、像ぶれがまったくない、あるいは十分に小さい(所定の閾値以下である)場合は、分割蓄積期間が終わるごとに垂直転送を行う必要がないため、垂直転送パルスVDPは印加されず、図15(e)及び図16(e)に示した垂直転送のための期間102a〜102cは存在しない。この場合は例えば読み出したN枚の画像をそれぞれ移動することなく、読み出した状態のまま加算して最終的に一枚の画像を得る。
【0060】
図15(f)及び図16(f)において、符号110は、垂直転送期間102a〜102cにおいて垂直転送部22内の電荷を水平転送部27方向に転送することによって水平転送部27に押し出された後、水平転送部27に蓄積された余分な電荷を掃き捨てる、即ち、水平転送部27内の蓄積電荷を(次の垂直転送に先立って)ゼロにするための期間である。
【0061】
なお、図15(a)〜(f)及び図16(a)〜(f)の例では、フレーム期間FP(k)にオーバーフロードレインパルスOF1を印加しているが、代わりに、垂直ブランキング期間VB(k)に読み出しパルスTGを読み出しゲート25に印加することにより、電荷蓄積期間SS(k−1)で蓄積された全電荷を垂直転送部22に読み出した後、水平転送部27への高速転送し、さらに水平転送部27で高速転送することによって掃き捨てを行うこととし、これによりオーバーフロードレインパルスOFD1を不要とすることも可能である。
また、像ぶれ補正を行ったフレーム期間FP(k)の次のフレーム期間FP(k+1)における水平転送期間101cで電荷転送を行う際の最初の、1ラインを破棄するようにすれば、ブランキング期間VB(k+1)の水平転送期間110を不要とすることができる。
さらに本実施の形態では電子シャッタパルスによる電荷蓄積期間の調節を行っているが、機構式のシャッタを設けることにより、シャッタが開いている間だけ電荷蓄積を行うようにすることもできる。
【0062】
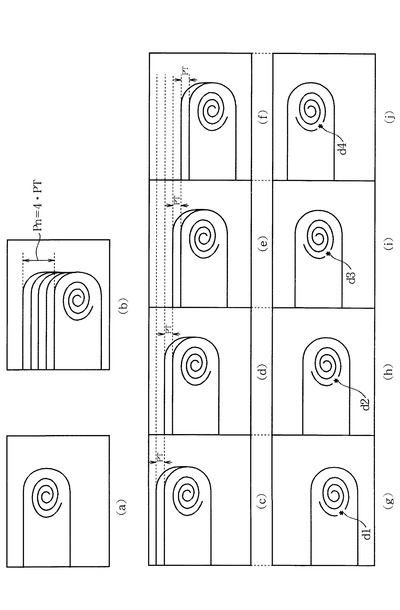
撮像時に像ぶれをおこしたときの撮像画像(被写体像)、ならびに固体撮像素子2の撮像面上における被写体像の詳細を図17(a)乃至(j)に示す。本例は被検査体が第1の方向(図17(b)の下方向)に移動したことにより像ぶれをおこした場合であり、分割蓄積期間数が4、垂直方向の像ぶれの画素換算数Pnが4・PTである場合を示している。図17(a)は被検査体を撮像レンズ上方で静止させて撮像したものであり、像ぶれが生じていない場合を示す。図17(b)は、図15(c)における符号SS(k−2)、SS(k−1)で示す場合と同様に、電荷蓄積期間を分割せず、且つ像ぶれ補正を行なわない場合の撮像画像であり、垂直方向にPn=4・PT画素分の像ぶれが発生している。
【0063】
図17(c)〜(f)は、図17(b)の画像を4つの分割蓄積期間に分割して取得したそれぞれの画像であり、それぞれ分割蓄積期間S1、S2、S3、S4において電荷蓄積を行うとともに、分割蓄積期間ごとに全画素を読み出すと仮定した場合に得られる撮像画像を示している(実際には、分割蓄積期間ごとの画像が固体撮像素子から外部に読み出されるわけではなく、垂直加算部で加算された後外部に読み出される)。分割蓄積期間S1〜S4は互いに同じ長さであり、図17(c)〜(f)の撮像画像の輝度は、いずれも図17(b)の撮像画像の輝度の1/4となる。
【0064】
図17(c)〜(f)の各々において、点線と実線の差は各分割蓄積期間中のぶれを表す。本実施の形態1は、相前後して得られる画像間に存在するPT画素分のずれを逐次補正して加算(合成)するものであり、即ち、図17(c)の画像をPT画素分だけシフトして図17(d)の画像と合成して第1の合成画像を形成し、この第1の合成画像をさらにPT画素分だけシフトして図17(e)の画像と合成して第2の合成画像を形成し、この第2の合成画像をさらにPT画素分だけシフトして図17(f)の画像と合成して第3の合成画像(最終的な合成画像)を形成するものであり、これにより、図17(f)の撮像画像と略同位置に被写体像が位置する画像(図17(f)の被写体像に、図17(c)〜(e)の被写体像をそれぞれシフトした上で合成した(重ね合わせた)のと同じ画像)を最終的な撮像画像として固体撮像素子2から出力するものである。
【0065】
図17(g)〜(j)はレンズを通して被検査体を固体撮像素子2の撮像面上に投影したときの被写体像を示しており、それぞれ対応する図17(c)〜(f)の画像とは、上下左右が反対の関係にある。
【0066】
図17(g)〜(j)の被写体像について、便宜上像ぶれによる尾引き部分を描画していないが、実際には図17(c)〜(f)の被写体像と同様の像ぶれによる尾引き部分が存在する。分割蓄積期間数が4であれば、総像ぶれ量の1/4の像ぶれが各分割蓄積期間の画像ごとに発生する。
なお、分割蓄積期間数が8であれば各分割蓄積期間の画像には総動き量の1/8の像ぶれが発生することになる。
【0067】
被検査体が前記の第1の方向と反対方向(第2の方向)に移動した場合、図17(g)、(h)、(i)、(j)の、上下左右反転した撮像面上の被写体像は上方向に移動する。図17(g)、(h)、(i)、(j)中の符号d1、d2、d3、d4で示す「*」印は被検査体(人さし指)上の同じ箇所における1画素を示しており、以下この画素に注目して垂直転送部22内における電荷転送の詳細を図16(a)〜(f)および図18(a)〜(j)を用いて説明する。
【0068】
図16(a)〜(f)には、それぞれの動作に対し、時系列に、符号TSaからTSkが割り当られている。これら動作TSa〜TSkが行われる時点における垂直転送部22内の電荷転送の様子を、図18(a)〜(h)を参照して説明する。
【0069】
図18(a)〜(h)は、図17(g)〜(j)に示すように、固体撮像素子2の撮像面上で被検査体が上方向に移動した際の垂直転送部22内における電荷転送による像ぶれ補正の方法を示している。図2および図3と同様に、図18(a)〜(j)において、各光電変換素子列20は複数の光電変換素子21を含み、垂直転送部22は複数の転送素子23を含む。各転送素子23は画素に対応するものであり、4つの転送電極を備えているが、図18(a)〜(h)ではこの点の図示を省略している。
読み出しゲート部24の読み出しゲート25の各々は、各光電変換素子21と対応する転送素子23の間に設けられている。
まず図18(a)に示すように、最初の分割蓄積期間S1(TSa)において、注目画素(図17(g)のd1)に対応する光電変換素子21(1)で光電変換を行って電荷d1を蓄積する。
【0070】
次に図18(b)に示すように、読み出しパルスTG1により分割蓄積期間S1中に光電変換素子21(1)に蓄積された電荷d1を垂直転送部22の対応する転送素子23(1)に読み出す(TSb)。
この電荷読み出しが終了した直後から図18(c)に示すように、2番目の分割蓄積期間S2において注目画素の光電変換素子21(2)における電荷d2の蓄積(TSc)を開始し、この電荷蓄積(TSc)中に、動作TSbにより垂直転送部22に読み出され電荷を転送素子23(1)からPT画素分上方向に、即ち転送素子23(2)に移動させる(TSd)。
次に図18(d)に示すように、読み出しパルスTG2により光電変換素子21(2)の電荷d2(分割蓄積期間S2中に光電変換素子21(2)に蓄積された電荷d2)を垂直転送部22の対応する転送素子23(2)に読み出し、垂直転送部22内で、転送素子23(1)から転送素子23(2)に移動した電荷d1と加算する(TSe)。
【0071】
この電荷読み出し及び加算が終了した直後から図18(e)に示すように、3番目の分割蓄積期間S3において注目画素の光電変換素子21(3)における電荷d3の蓄積(TSf)を開始し、この電荷蓄積(TSf)中に、動作TSeにおいて垂直転送部22の転送素子23(2)内で加算した電荷(d1+d2)を転送素子23(2)からPT画素分上方向に、即ち転送素子23(3)に移動させる(TSg)。
次に図18(f)に示すように、読み出しパルスTG3により光電変換素子21(3)の電荷d3(分割蓄積期間S3中に光電変換素子21(3)に蓄積された電荷d3)を垂直転送部22の対応する転送素子23(3)に読み出し、垂直転送部22内で、転送素子23(2)から転送素子23(3)に移動した電荷(d1+d2)と加算する(TSh)。
【0072】
この電荷の読み出し及び加算が終了した直後から図18(g)に示すように、4番目の分割蓄積期間S4において注目画素の光電変換素子21(4)における電荷d4の蓄積(TSi)を開始し、この電荷蓄積(TSi)中に、動作TShにおいて垂直転送部22の転送素子23(3)内で加算した電荷(d1+d2+d3)を転送素子23(3)からPT画素分上方向に、即ち転送素子23(4)に移動させる(TSj)。
次に図18(h)に示すように、読み出しパルスTG4により光電変換素子21(4)の電荷d4(分割蓄積期間S4中に光電変換素子21(4)に蓄積された電荷d4)を垂直転送部22の対応する転送素子23(4)に読み出し、垂直転送部22内で、転送素子23(3)から転送素子23(4)に移動した電荷(d1+d2+d3)と加算する(TSk)。
その後全画素のデータを矢印Ymで示すように、水平転送部27へ転送する(図16(e)の100c)と同時に、水平転送部27内で出力増幅器部28へ向けて、信号電荷の転送を行う(図16(f)の101c)。
以上の動作により、像ぶれの低減された画像データを得ることが可能となる。
【0073】
なお、上記の例では、被検査体の移動に伴う像の移動の向きが図18で上向きであり、像ぶれ補正のための垂直転送部22内での電荷移動の方向も上向きであり、一方、水平転送部27への転送のための電荷移動は下向きであるが、像ぶれ補正のための垂直転送部22内での電荷移動の方向が、垂直転送部22から水平転送部27への転送のための電荷移動の方向と一致するように、固体撮像素子の向きを決めておくこととしても良い。そうすれば、垂直転送部22から水平転送部27への転送のための電荷移動の距離を短くすることができ、そのための時間を短縮し、また電荷移動に伴う電荷の損失を削減することができる。
【0074】
次に、第1及び第2のセンサ9,10による被検査体の移動速度の検出及び検出結果に基づく固体撮像素子の制御について説明する。
第1及び第2のセンサ9,10が図5,図6及び図8に示されるように構成されている場合、発光部51,53と受光部52、54の間を通過する際の被検査体61の位置に応じて、第1及び第2のセンサ9,10の出力は変化する。具体的には、被検査体61(人さし指、特にその先端に近い部分)が受光部52,54上を通過する際に、発光部51,53からの光を遮光することで、受光部52,54の検出出力は、H(光がある場合の出力信号の論理)からL(光がない場合の出力信号の論理)へと変化する。
【0075】
続いて、受光部52,54の上方を、被検査体61が通過し終わり、発光部51、53からの光を受光部52,54で受光する。受光部52,54の検出出力は、L(光がない場合の出力信号の論理)からH(光がある場合の出力信号の論理)へと変化する。
【0076】
演算手段42aは、センサ9の出力がHからLへ変化した時刻、及びセンサ10の出力がHからLへ変化した時刻より、被検査体61の第1及び第2の位置50a、50b間の被検査体61の通過時間(時間差)を求め、撮像位置50cにおける被検査体の推定移動速度を求め、演算手段42bは、この推定された移動速度を元にして、電荷蓄積期間の分割数Nを算出し、タイミング生成手段43へ出力し、第2の位置50bを通過してから撮像位置50cに達するまでの時間(遅延フレーム数Df)を推定する。
【0077】
続いて、タイミング生成手段44は、演算手段42bで算出した電荷蓄積期間の分割数を設定する制御信号出力から、像ぶれ補正を行うフレーム期間における固体撮像素子2の駆動パルスを生成する。演算手段42bからタイミング生成手段44への制御信号とは、例えば3線シリアル通信を用いて設定された、電荷蓄積期間の分割数を示すバイナリデータである。タイミング生成手段44は、FPGA(Field Programmable Gate Array)、ゲートアレー、ICなどのハードウェアにて実現できる。電荷移動手段45は垂直転送部で構成され、タイミング生成手段44の駆動パルスにより、像ぶれ量に応じてぶれが補正される方向に電荷を移動させる。
【0078】
固体撮像素子2は、被写体像の光路がレンズやプリズム等の光学系によりいかなる方向に屈折されていても、最終的に固体撮像素子2の撮像面に投影された被検査体の移動方向が固体撮像素子の垂直転送部における電荷転送方向と平行になるように配置される。
【0079】
固体撮像素子2は、受光部にて蓄積され、電荷読み出し期間に電荷読み出しパルスTGにて垂直転送部に読み出された電荷を、ぶれ量に応じた画素数(ライン数)だけ垂直転送パルスVDPで垂直転送する。図4に示されるV軸は、この垂直転送部22の電荷転送方向と一致している。一方、V軸と直交するH軸は、垂直転送部22から水平転送部27へ転送された電荷が、水平転送パルスHDPにより水平転送される方向と一致する。
【0080】
以下に、図5、図6及び図8の構成を用いた場合について、認識装置の詳細な動作と、像ぶれ量と電荷移動量制御の関係について説明を加える。
【0081】
被験者は、被検査体61(ここでは、指)を認識装置の保持板56、57の間に挿入し、矢印MVの方向へ移動させる。指61は、第1のセンサ9を通過する際、発光部51からの光を遮光するため、第1の受光部52の出力が、Lへと遷移する。指61はさらに、第2のセンサ10を通過する際、発光部53からの光を遮光するため、第2の受光部54の出力が、Lへと遷移する。
演算手段42aは、第1の受光部52の出力がHからLへと遷移した時刻をt1(ms)、第2の受光部54の出力がHからLへと遷移する時刻をt2(ms)としたときの、第1のセンサ9と第2のセンサ10間の通過時間τ(ms)を求める。通過時間τは、下式(1)で求められる。
τ(ms) = t2(ms)−t1(ms) …(1)
【0082】
なお、上記のように、第1のセンサ9を通過する時刻と第2のセンサ10を通過する時刻を検出する代わりに、第1のセンサ9を通過したときに計時を開始するタイマーを用いて、第2のセンサ10を通過するまでの時間を計時することとしても良い。
【0083】
第1の受光部52と第2の受光部54の間隔がd(mm)のとき、該2つの受光部間を被検査体である指が通過する際の通過速度v(m/s)は、
v = d/τ (m/s) …(2)
となる。撮像部が撮影を行う際のシャッタ開放時間(シャッタスピード)S(s)中の被検査体61の移動量Δxは、
Δx =v・S= d・S/τ (m) …(3)
で与えられる。
【0084】
ここで開放時間(シャッタスピード)S(s)は本認識装置で被写体像を撮像する際に像ぶれ補正を行うフレーム期間における電荷蓄積期間と同義である。
【0085】
図19に示すように、レンズ1から被検査体61までの距離(被写体距離)をh(mm)、レンズ1とCCDの撮像面2aまでの距離(像距離)をf(mm)とすると、被検査体61とCCDの撮像面2a上の被写体像との大きさにはh:fの関係がある。
被検査体がΔx移動した場合、CCD撮像面2a上では、被写体像が
Δx’ = Δx・f/h (m) …(4)
移動することになる。CCDの画素ピッチをPs(μm)とし、式(4)の距離Δx’を画素数Pnに換算すると、
Pn = Δx’/Ps = (d・S・f)/(τ・h・Ps) …(5)
と表される。
一例として、d=15(mm)、f=6(mm)、h=100(mm)、τ=200(mm)、S=1/30(s)、Ps=4.65(μm)であるとき、これらの値を式(5)に代入すると、Pn=33(画素)となる。
PnをPTで割ることにより、分割数Nが求まる。上記の例では、
Pn/PT=33/2=16.5であるので、小数点以下を切り捨てる処理、又は四捨五入する処理などの丸め処理により処理分割数Nを16又は17とする。
【0086】
なお、式(5)を変形すると、
Pn/Ps = d・f/τ・h・S
が得られる。上式は、撮像面上での画素数で表した画像の移動速度を求める式であり画素数で表した像ぶれ量Pnを求める演算は、撮像面上での被写体像の、移動速度(距離を画素数で表した移動速度)を求める演算と等価であるとも言える。
【0087】
被検査体が第2のセンサ10の位置(第2の位置)50bを通過してから撮像レンズ1の位置(撮像位置)50cまで移動する時間は、被検査体の通過速度が速いほど短い。そのため被検査体を画角中央で撮像するためには、通過速度に応じて像ぶれ補正の開始時期を制御する必要がある。図14(c)に示すように、時刻t2において、被検査体が第2のセンサ10を通過してから、ある遅延フレーム数(Df)が経過した後に像ぶれ補正を実施することとして、該遅延フレーム数Dfを制御する。具体的には、図8のように第2のセンサ10の位置(第2の位置)からレンズ1の中央までの距離をg(mm)、距離gの通過時間をβ(ms)とすると、被検査体を画角中心で撮像するためには、被検査体が第2のセンサ10を通過してからβ(ms)後の画像を撮像する必要がある。1フレーム期間がY(ms)であるとき、遅延フレーム数Dfは
Df=β/Y= g・τ/d・Y …(6)
となる。
ここでdは、上記と同様、第1のセンサ9から第2のセンサ10までの距離(mm)を表す。
遅延フレーム数Dfは1以上と整数であり、第2のセンサ10が被検査体の通過を検出した後の次のフレーム期間の始まりから、像ぶれ補正を行うフレーム期間の始まりまで(図14の両矢印付き線Dspで示す期間)の期間とする。
演算手段42bは、上記の式(5)、式(6)の計算を含む上記の処理により画素数で表された像ぶれ量Pn,分割回数N、遅延フレーム数Dfを求める。
【0088】
図20は、実施の形態1における像ぶれ補正の動作を示すフローチャートである。まず第1のセンサ9で被検査体の通過を検出したことにより第1のセンサ9の出力(第1の受光部52の出力)DT1がHからLに変化したかどうかを監視し(ステップSt0)、次に第2のセンサ10で被検査体の通過を検出したことにより第2のセンサ10の出力DT2がHからLに変化したかどうかを監視する(ステップSt1)。ステップSt0で第1のセンサ9の出力DT1がHからLになった時刻(t1)と、ステップSt1で第2のセンサ10の出力DT2がHからLになった時刻(t2)から演算手段42aにて第1及び第2のセンサ9,10間の被検査体の通過時間τ(ms)を算出する(ステップSt2)。
次にステップSt2で算出した被検査体通過時間τ(ms)と式(5)を用いて演算手段42bにて固体撮像素子2の撮像面における(画素数で表された)像ぶれ量Pnを算出する(ステップSt3)。
次に、算出した像ぶれ量Pnと、分割蓄積期間ごとに垂直転送部22内で電荷を転送する量PTより電荷蓄積期間の分割数N、すなわち読み出す画像数Nを決定するとともに遅延フレーム数Dfを式(6)より決定する(ステップSt4)。
【0089】
次に遅延フレーム数Dfの経過を監視する(ステップSt5)。延フレーム数Dfが経過すると、次に分割数Nが1か否かを判定する(ステップSt6)。N=1であれば画像を読み出し、光電変換素子列20の電荷を垂直転送部22に読み出し(ステップSt7)、次のフレーム期間に垂直転送部22内の全電荷を水平転送部27へ転送して(ステップSt16)、終了する。
【0090】
ステップSt6においてN=1でない場合は、ステップSt8に進み、分割したN画像のうち第1番目の画像から読み出す目的にてパラメータnをセットする(ステップSt8)。ここでパラメータnは、分割読み出しをN回繰り返す際の計数値として用いられているものである。次に第n番目の画像を光電変換素子列20から垂直転送部22に読み出す(ステップSt9)。初期状態(ステップSt9を最初に実行するとき)ではステップSt8によりn=1であるため、第1の画像を読み出すことになる。
【0091】
次に、色フィルタの繰り返しパターンの周期に対応して決まる固定値PTに応じた画像位置(画素数)だけ画像をシフトさせた後(ステップSt10)、垂直転送部22内に保持する(ステップSt11)。次に第(n+1)番目の画像を読み出す(ステップSt12)。初期状態では(即ち、ステップSt12を最初に実行するときは)該第(n+1)番目の画像とは第2の画像のことを指す。
【0092】
そして垂直転送部22内にそれ以前から保持されている画像と、光電変換素子列20から垂直転送部22に読み出されたばかりの画像とを加算する(ステップSt13)。これらの画像の加算は、画像のシフトが行われた垂直転送部22のそれぞれの転送素子23に、光電変換素子列20のそれぞれの光電変換素子21で蓄積された電荷を読み出すことにより、行われる。
【0093】
次にn=N−1か否かを判定する(ステップSt14)。n=N−1でない場合は、nに1を足して(ステップSt15)、ステップSt10に戻り、ステップSt10からステップSt14の処理を繰り返す。この繰り返しは、ステップSt14でn=N−1となるまで続けられる。n=N−1となれば次のフレーム期間に垂直転送部22内の全電荷を水平転送部27へ転送して(ステップSt16)、終了する。
【0094】
実施の形態2.
上記の実施の形態では、第1及び第2のセンサ9,10が、図5及び図6に示すように構成されているが、第1及び第2のセンサ9,10は、図21や図22に示すように構成することもできる。
【0095】
図21は、1つの発光部62と、2つの受光部52、54で構成した点が、図5及び図6とは異なるのみで、発光部からの光の遮光を検出して、演算手段42aで移動時間を推定するという基本的な動作は同じである。本例では被検査体検出手段41は、1つの発光部62と第1の受光部52と第2の受光部54とを備え、発光部62は第1の受光部52と第2の受光部54を結ぶ線に垂直な線上にあり、かつ第1の受光部52までの距離と第2の受光部54までの距離が等しい位置に配置されている。この構成をとることで、発光部の個数が減り、コスト削減ができる。
図21の構成においては、発光部62と第1の受光部52とで第1のセンサ9が構成され、発光部62と第2の受光部54とで第2のセンサ10が構成されており、発光部62が第1のセンサ9の一部であるとともに、第2のセンサ10の一部でもある。
【0096】
実施の形態3.
また、図22は、第1のセンサ9及び第2のセンサ10はそれぞれ反射型フォトセンサ(フォトリフレクタ)63,64で構成されている。フォトリフレクタ63は発光部63aと、受光部63bとで構成されており、発光部63aから出た光が被検査体で反射して受光部63bに入射するように配置され、同様にフォトリフレクタ64は発光部64aと、受光部64bとで構成されており、発光部64aから出た光が被検査体で反射して受光部64bに入射するように配置されている。
図22の構成の場合、被検査体が第1及び第2のセンサ9,10に対向する位置(第1、第2の位置)にないときには、発光部63a、64aからの光は、受光部63b、64bには入射せず、受光部63b、64bの出力がLである。被検査体が第1及び第2の第1及び第2のセンサ9,10に対向する位置(第1、第2の位置)にあるときは、発光部63a、64aからの光が被検査体で反射して受光部63b、64bに入射し、受光部63b、64bの出力がHとなる。
【0097】
演算手段42aでは、受光部63b、64bの出力からLからHに変化した時刻から受光部64bの出力がLからHに変化した時刻の時間を「通過時間」として検出し、この間の平均的移動速度を算出する。
なお、図21や図22に示す例でも、発光部62、63a、64aとしては、発光ダイオード例えば赤外線発光ダイオードで構成されたものを用い、受光部52、54、63b、64bとしては、フォトトランジスタ、例えば赤外線発光ダイオードが発生する光に感度を有するフォトトランジスタで構成されたものを用いることができる。
【0098】
実施の形態4.
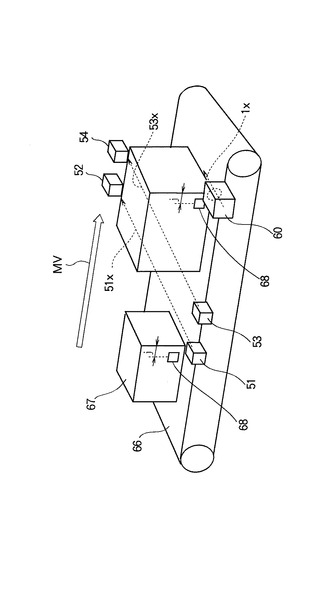
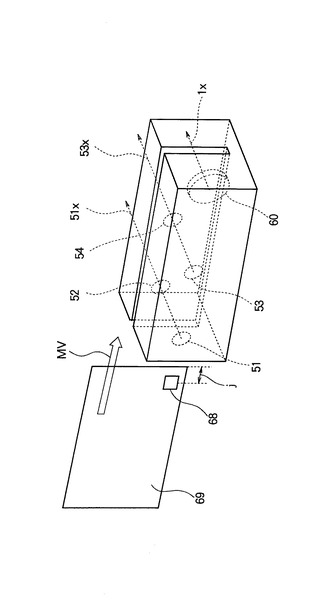
上記の実施の形態では、被検査体が指であり、人が自分で指を動かす間に撮像を行って指紋などの生体情報の認識を行っているが、本発明はこれに限定されず例えばベルトコンベアにより搬送される物品の認識、例えば物品に付された2次元コードの認識を行う場合に適用することもできる。図23はそのような場合に用いられるセンサ及び撮像部の配置を示す。
【0099】
図23は移動するベルトコンベア66上に置かれ、矢印MVの方向に搬送される、梱包された物品67に貼り付けられた2次元コード68を認識する装置であり、2次元バーコードには物品に関する仕向け先や物品の内容等の情報が暗号化されている。
非接触にて2次元コード68を撮像し、後段の信号処理を行うことによりコードを解読できる。
被検査体検出手段41としての第1及び第2のセンサ9及び10は、例えば図5,図6及び図8の例で示したのと同様のフォトセンサでも良い。フォトセンサはそれぞれ発光部51、53と、発光部51、53からの光軸51x、53xに沿う光を受ける受光部52、54とを備えている。
撮像部60は図5及び図6に示したとの同様のレンズ1と固体撮像素子2を用いたものである。
【0100】
第1及び第2のセンサ9とセンサ10により被検査体(製品などの物品)の通過を検出し、検出結果に基づいて演算手段42aで移動速度を求め、該移動速度に応じて撮像部60内のCCD内にて像ぶれ補正を実施する。このため、ベルトコンベア66の移動速度が変化した場合でも、実際の移動速度(速度変化)に対応した良好な像ぶれ補正が可能である。また、2次元コード68はこれに限定されるものではなく、例えば1次元バーコードや写真等、本認識装置にて認識を行うものであればよい。
【0101】
実施の形態5.
本発明はまた、カードリーダにも適用可能である。図24は本発明をカードリーダに適用した場合のセンサ及び撮像部の配置を示す。図23の例ではベルトコンベアによって被検査体が移動していたが、図24では人がカード69を矢印MVの方向へ通すことにより認識を行う。撮像部60は図示しない照明手段等を具備し、撮像タイミングにて発光させることで照度を確保するように構成することもできる。その他基本動作と効果は図5,図6及び図8に示した例や図23に示した例と同じである。
【0102】
なお、式(6)により遅延フレーム数Dfを定める場合、図23の例では、物品67の前端、即ち移動に伴い最初にセンサの光を遮る部分が撮像部60の光軸1xの位置に達したときに撮像が開始されるが、2次元コード68が撮像部の光軸1xの位置に達したときに撮像が開始されるようにするには、物品67の前端67aと二次元コード68との間隔j(mm)を考慮に入れ、式(6)のgの代わりにg+jを代入した式を用いて遅延フレーム数Dfを求める。
【0103】
上記の実施の形態では、センサ9,10の光軸51x,53xと撮像部60の光軸1xが平行であるが、平行でなくても良い。例えば、図23に示す構成において、センサ9,10の光軸は上下方向に、撮像部1xの光軸は図示と同様に水平方向に配置されていても良い。
【0104】
なお、上記の実施の形態では、第1及び第2のセンサ9,10により移動速度を求めることとしているが、本発明はこれに限定されず、例えば被検査体の移動に伴って回転するローラの回転速度を検出することにより、被検査体の移動速度を検出するようにしても良い。
また、レーザ光を利用した距離計測用センサを用いて計測した距離に基づき、物品が所定位置を通過したことを検出しても良く、また計測した距離の変化に基づき移動速度を検出するようにしても良い。
【0105】
以上説明したように本発明の実施の形態1によれば、被検査体の移動を一軸方向に限定されるように支持したことにより、被検査体検出手段41の第1のセンサ9、同被検査体検出手段41の第2のセンサ10の順で被検査体通過の検出を行い、さらに被検査体が移動すると固体撮像素子上のレンズ前面の撮像位置50cを通過するように、被検査体検出手段41ならびに撮影レンズ1及び固体撮像素子2が配置されているため、被検査体検出手段41の検出結果に応じて即座に高精度な像ぶれ補正が実施可能である。
【0106】
また、固体撮像素子内部の電荷移動のみで像ぶれを低減、補正するため、アクチュエータ等の特殊な機構や外部メモリを必要とせず、低コストで認識装置を提供できる。
【0107】
特に、実施の形態1によれば、電荷転送量PTを固定値とし、像ぶれ量Pnに応じて分割数Nを増減させるようにしたので、分割数Nを最大にすることで、もっとも大きな像ぶれ補正効果を得ることができる。また、像ぶれ量Pnを電荷転送量PTで除算することで分割数Nを決定しているので、均等に像ぶれの補正を行うことができる。
【0108】
上記の実施の形態では、被検査体が撮像位置を通過すると推定されるタイミングで1フレーム期間だけ電荷蓄積期間の分割による像ぶれ補正を行っているが、上記推定タイミングのフレームのみならず、その直前又は直後、又はその両方のフレーム期間においても、電荷蓄積期間の分割による像ぶれ補正を行い、それぞれのフレーム期間の画像を用いた認識結果を総合的に判断しても良い。
【図面の簡単な説明】
【0109】
【図1】本発明の実施の形態1の認識装置の構成を示すブロック図である。
【図2】実施の形態1で用いられる固体撮像素子の構成を示す図である。
【図3】図2の固体撮像素子において縦方向に並んだ4画素を拡大して示す図である。
【図4】ベイヤ型色フィルタ配列を示す図である。
【図5】本発明の実施の形態1における認識装置のセンサ及び撮像部の配置を示す概略斜視図である。
【図6】図5の線50に沿う垂直断面図である。
【図7】図5の線VII−VII線断面図である。
【図8】本発明の実施の形態1における認識装置のセンサ及び撮像部の部材間の距離を示す概略平面図である。
【図9】実施の形態1において像ぶれ補正を行うための構成要素を示す機能ブロック図である。
【図10】垂直転送部内で順方向に電荷を転送する場合に印加される垂直転送パルスVDPを示すタイミングチャートである。
【図11】垂直転送部内で順方向に電荷を転送する場合の固体撮像素子の転送素子の電極の電位分布を示す図である。
【図12】垂直転送部内で逆方向に電荷を転送する場合に印加される垂直転送パルスVDPを示すタイミングチャートである。
【図13】垂直転送部内で逆方向に電荷を転送する場合の固体撮像素子の転送素子の電極の電位分布を示す図である。
【図14】(a)〜(f)は、実施の形態1の認識装置の動作を示すタイミングチャートである。
【図15】(a)〜(f)は、図14(a)〜(f)のうちに、電荷蓄積期間の分割による像ぶれ補正を行うフレーム期間及びその直前のフレーム期間をより詳細に示すタイミングチャートである。
【図16】(a)〜(f)は、図15(a)〜(h)のうちの、電荷蓄積期間の分割による像ぶれ補正を行うフレーム期間を時間軸方向に拡大して示すタイミングチャートである。
【図17】(a)〜(j)は、実施の形態1における被写体像と固体撮像素子の撮像面の被写体像の変位を示す図である。
【図18】(a)〜(j)は、実施の形態1における垂直転送部内の電荷転送ならびに電荷加算方法を示す図である。
【図19】被写体像とレンズとの距離及び被検査体の大きさと撮像面上での被写体像の大きさの関係を示す図である。
【図20】実施の形態1における像ぶれ補正動作を示すフローチャートである。
【図21】本発明の実施の形態2に係る認識装置のセンサ及び撮像部の配置を示す概略斜視図である。
【図22】本発明の実施の形態3に係る認識装置のセンサ及び撮像部の配置を示す概略斜視図である。
【図23】本発明の実施の形態4に係る認識装置のセンサ及び撮像部の配置を示す図である。
【図24】本発明の実施の形態5に係る認識装置のセンサ及び撮像部の配置を示す図である。
【符号の説明】
【0110】
1 レンズ、 2 固体撮像素子、 3 アナログ信号処理部、 4 画素信号A/D変換部、 5 信号処理部、 6 表示手段、 7 CPU、 8 タイミングジェネレータ、 9 第1のセンサ、 10 第2のセンサ、 11 積算部、 12 レンズ駆動部、 21 光電変換素子(PD)、 22 垂直転送部、 24 読み出しゲート部、 27 水平転送部、 28 出力増幅器、 41 被検査体検出手段、 42a 演算手段、 42b 演算手段、 44 タイミング生成手段、 45 電荷移動手段、 51 発光部、 52 受光部、 53 発光部、 54 受光部、 60 撮像部、 61 被検査体、 62 発光部、 63 フォトリフレクタ、 64 フォトリフレクタ、 66 ベルトコンベア、 67 物品、 68 2次元コード、 69 カード、 PX 画素。
【技術分野】
【0001】
本発明は、CCDイメージセンサなどの固体撮像素子を用いた認識装置に関し、より詳細には、静止画向けの像ぶれ補正機能を有し、像ぶれを軽減した静止画撮像が可能な認識装置に関する。
【背景技術】
【0002】
近年情報処理の分野においては、本人認証を目的として個人の指紋などの生体情報をデジタル方式のカメラで撮像した画像に画像処理を施し、蓄積済みの他の指紋データと照合したり、本人の写真が載ったパスポートや2次元コードが貼付されたカード、文字が印刷された紙などの非生体情報を同じくデジタル方式のカメラで撮像し、撮像画像に画像処理を施すことにより情報認識を行っている。
【0003】
1次元のバーコードはラインセンサで認識が可能であるため1つのセル(白と黒のラインで表される2値データ)の検出のためには3×3画素以上の画像領域で可能であるが、より多くの情報を含有する2次元コードを認識するためにはコード領域全てを撮像することが必要となる。2次元コード認識や指紋認識、文字認識を行うには、認識に必要な領域の画像をCCDイメージセンサなどの固体撮像素子を用いて撮像する必要があり、撮像時に被写体となる被検査体としての指やカードが動いてしまうことにより、記録画像にぶれが発生して認識精度が低下することがあった。
【0004】
例えば、特許文献1に記載された認識装置は、ベルトコンベア上に搭載された被検査体としての製品などに貼付されたバーコードをCCDイメージセンサ(カメラ)で読み取ることにより製品の種類や仕向け先を判別するものであるが、ベルトコンベアが移動することに起因する記録画像ぶれを抑圧するため、ベルトコンベアの移動速度を高速とする場合は、認識精度は一定を確保しつつ製品の移動量に対する撮像面上に投影された製品像の移動量が最小となるように製品とカメラを遠ざけるように構成されている。
【0005】
【特許文献1】特開2001−167225号公報(第1−5頁、第1図)
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載された従来の認識装置では、読み取るコードは1次元バーコードであり、そのため、読み取り方向は横方向(白黒ラインと交差する方向)であって、認識領域は5画素幅以上の画像切り出し領域でよく、そのために被検査体としての製品とカメラを遠ざけることが可能であった。読み取りコードが2次元コードの場合は、読み取り方向は横方向と縦方向の2方向であるため、より多くの画像認識領域を必要とする。そのため、1次元バーコードを用いる場合に比べて、被検査体とカメラを近づける必要がある。被検査体とカメラを近づけると、像ぶれを抑制するためにベルトコンベアの移動速度を低速にする必要があり、設備の処理能力を低下させる原因となる。
【0007】
また、被検査体とカメラとを近づけることなく、ベルトコンベアの速度を高速に保つためには、CCDイメージセンサの画素数を増加させれば良いが、固体撮像素子変更によるコストの上昇と装置の大型化を伴う。
【0008】
本発明は上述したような課題を解決するためになされたものであり、特殊な機構やメモリを必要とせずに像ぶれ補正を実施することにより、小型で低コストの、非接触型の認識装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、
移動する被検査体が所定の撮像位置を通過するときに、該被検査体からの光を受けて光電変換を行う光電変換部と、前記光電変換部で生成された電荷を転送する転送部とを備えた固体撮像素子と、
前記被検査体が前記撮像位置に達する前に順に通過する第1の位置及び第2の位置において、前記被検査体の通過を検出する被検査体検出手段と、
前記被検査体検出手段より検出した第1の位置の検出信号及び第2の位置の検出信号をもとに、前記固体撮像素子の撮像面上での像ぶれ量を推定し、像ぶれ補正を行うタイミングを決定する演算制御手段と、
前記推定された像ぶれ量に応じて該像ぶれを打ち消すように、前記光電変換部で生成された電荷を前記転送部内で転送させながら、電荷蓄積を行っての画像電荷を形成させる撮像素子駆動手段とを備えた
ことを特徴とする認識装置を提供する。
【発明の効果】
【0010】
本発明によれば、特殊な機構やメモリを必要とせずに固体撮像素子内で像ぶれ補正を実施することにより小型で低コスト、かつ精度の高い認識装置を提供することが可能となる。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
図1は、本発明の実施の形態1における認識装置の基本構成を示す図である。図1に示すように、この認識装置は、非接触型のものであり、レンズ1と、固体撮像素子2と、アナログ信号処理部3と、画素信号A/D変換部4と、信号処理部5と、表示手段6と、CPU7と、タイミングジェネレータ8と、第1のセンサ9と、第2のセンサ10と、積算部11と、レンズ駆動部12とを有する。
【0012】
レンズ1と固体撮像素子2とで撮像部60が構成される。レンズ1を通して入射した被検査体の光学像(被写体像)は固体撮像素子2で光電変換される。このレンズ1は焦点距離が可変なズームレンズとして機能する。レンズ駆動部12からの制御信号によって、レンズ1は光軸1x上で前後へ移動し、焦点距離を連続的に変えることができる。この制御信号はCPU7から出力される。
【0013】
固体撮像素子2は、例えばCCDイメージセンサで構成され、図2に示すように、複数の光電変換素子列20を有する光電変換部19と、それぞれ光電変換素子列20に対応し、光電変換素子列20に隣接して設けられた複数の垂直転送部22と、光電変換素子列20と垂直転送部22の間に位置する読み出しゲート部24と、水平転送部27と、出力増幅器28とを有する。
各光電変換素子列20は、撮像画面上の第1の方向、例えば垂直方向に列をなす複数の画素位置に配置され、被検査体からの光を、レンズ1を介して受けて、光電変換を行なう複数の光電変換素子21を有する。
【0014】
各垂直転送部22は、対応する光電変換素子列20の光電変換素子21にそれぞれ対応して設けられ、対応する光電変換素子21で蓄積された電荷が、読み出しゲート部24のそれぞれの読み出しゲート25を介して転送され、かつ相互間で垂直方向に電荷の転送を行う複数の転送素子23から成る。
水平転送部27は、垂直転送部22で転送され、垂直転送部22から出力された電荷を受けて、第1の方向と直交する第2の方向、例えば水平方向に転送する。
出力増幅器28は、水平転送部27を転送され、水平転送部27から出力された電荷を増幅して出力する。
【0015】
光電変換部19の光電変換素子21における光電変換によって、光の強さに応じた量の電荷が蓄積され、読み出しパルスTGによって、電荷が読み出しゲート部24を介して垂直転送部22に取り出され、4相のパルスφV1、φV2、φV3、φV4から成る垂直転送パルスVDPによって水平転送部27方向へ逐次転送される。水平転送部27では1ライン分の画素が入るたびに2相のパルスφH1、φH2から成る水平転送パルスHDPによって水平方向に電荷の転送を行ない、出力増幅器28で信号電圧に変換して信号を出力する。
【0016】
本願では簡単のため、垂直転送部22内の転送を単に「垂直転送」と言い、水平転送部27内の転送を単に「水平転送」と言うことがある。
【0017】
上記の垂直転送パルスVDPによって、垂直転送部22内の電荷を水平転送部27に向けた方向(図2の垂直転送部22内の矢印FWの方向。以下「順方向」と呼ぶことがある)へ転送するだけではなく、水平転送部27とは反対の方向(図2の垂直転送部22内の矢印FWと反対方向。以下「逆方向」と呼ぶことがある)へ転送することも可能である。また、垂直転送パルスVDPを印加しない時は、垂直転送部22は読み出しゲート部24を介して垂直転送部22に取り出された電荷を、垂直転送部22内で順方向にも逆方向にも移動させず、取り出された位置に保持することができる。
【0018】
垂直転送部22の各転送素子23は、内部に保持されている電荷と、対応する光電変換素子21から転送される電荷とを加算する。
【0019】
図3は、図2における縦方向に並んだ4画素を拡大して示す図である。符号PXは一つの画素を示す。各画素は、光電変換素子21、読み出しゲート25ならびに転送素子23を備える。本実施の形態では4相の垂直転送パルスVDPを用いており、1画素あたり4個の電極26a〜26dが存在する。光電変換素子21にて光電変換されて蓄積された電荷は、読み出しゲート25を介して転送素子23に読み出される。以下に述べるように、4相の垂直転送パルスVDPの電圧を所定の時系列で変化させることにより、垂直転送部22内の電荷を所望の画素数分だけ順方向にも、逆方向にも転送することができる。
【0020】
固体撮像素子2は色フィルタを備えない白黒センサであっても良く、また、例えば図4に示すベイヤ型に配置された色ファイルタを備えたカラーセンサであってもよい。色ファイルタを備えたカラーセンサでは、固体撮像素子の光電変換部19の光電変換素子21は、それぞれ異なる色の色フィルタで覆われ、該色フィルタが所定の繰り返しパターンで周期的に配列されている。ベイヤ型の色フィルタは、赤(R)、緑(G)、青(B)の色フィルタであり、R、G、Bの色フィルタで覆われた光電変換素子からは、R、G、Bの画素信号が得られる。図4で、符号Hは、撮像画面上の横軸、即ち水平方向軸を示し、水平方向軸に沿う1、2、…mは水平方向軸上の座標値を表し、符号Vは、撮像画面上の縦軸、即ち垂直方向軸を示し、垂直方向軸に沿う1、2、…nは垂直方向軸上の座標値を表す。
【0021】
ベイヤ型配列の場合には、図4に示すように、緑Gが市松状に配置され、その他の部分に赤R及び青Bが線順次に配置されている。例えば図4の3列目(H=3)に注目すると、その画素の並びは上から下に向かってR、G、R、G、・・・、Gのようになっており、R画素、G画素ともに1画素おきに並んでいる。
【0022】
そのため、後述のように分割した電荷蓄積期間(「分割蓄積期間」と言う)ごとに垂直転送部22内で電荷を移動する際の移動量が順方向または逆方向に奇数画素分である場合、例えば移動させたR画素の電荷にG画素の電荷を加算することになったり、移動させたG画素の電荷にR画素の電荷を加算することになり、適切ではない。同じ色の画素の信号電荷同士を加算するためには、電荷の移動量を偶数画素分とする必要がある。そのため、本発明では上記したように、分割蓄積期間ごとの電荷移動量を色フィルタの繰り返しパターンの周期に対応する最小画素数としている。固体撮像素子2として色フィルタを備えない白黒センサを用いる場合は分割蓄積期間ごとの電荷移動量は1画素(1ライン)となる。
【0023】
再び図1を参照し、固体撮像素子2として色フィルタを備えたカラー型のものを使用した場合の信号処理系統について述べる。固体撮像素子2から得られるR、G、Bの出力信号(画素信号)は、アナログ信号処理部3において、相関二重サンプリング処理(CDS)ならびに自動利得制御増幅処理(AGC)が施される。
固体撮像素子2に供給される、読み出しパルスTG、垂直転送パルスVDP、及び水平転送パルスHDP、並びに後述のオーバーフロードレインパルスOFD(これらを総称して「固体撮像素子の駆動用パルス」と呼ぶことがある)、並びにアナログ信号処理部3に供給されるCDSのためのサンプリングパルスDSPは、タイミングジェネレータ8によって供給される。これらのパルスの発生のタイミングは、CPU7によって制御される。また、アナログ信号処理部3におけるAGCも、CPU7からの制御信号によって行われる。
【0024】
アナログ信号処理部3の出力信号は、画素信号A/D変換部4にてデジタル信号に変換された後、信号処理部5にて映像信号処理され、表示手段6において表示可能な映像信号になる。信号処理部5では、RGB信号から輝度色差信号(YCbCr)への変換、ホワイトバランス補正、γ(ガンマ)補正、色補間処理および輪郭強調補正等の画像処理が行われる。LCDなどで構成された表示手段6は、信号処理部5から出力された映像信号を表示する。
認識装置の設置や調整に際し、作業者(調整者)は、表示手段6に映る被検査体の画像を見ながら固体撮像素子2の配置やレンズ1の焦点距離などを決める。
【0025】
第1及び第2のセンサ9及び10並びに撮像部60は、例えば図5,図6、図7及び図8のように配置されている。図5は斜視図、図6は図5の線50に沿う垂直断面図、図7は、図5のVII−VII線断面図である。図8は部材相互間の距離を示すための概略平面図である。図示の例では、第1のセンサ9は、発光部51と発光部51が発する光を受けるように配置された受光部52とから成る透過型フォトセンサ(フォトインタラプタ)で構成され、第2のセンサ10は、発光部53と発光部53が発する光を受けるように配置された受光部54とから成る透過型フォトセンサ(フォトインタラプタ)で構成されている。
【0026】
発光部51及び53は、例えば発光ダイオード、例えば赤外線発光ダイオードで構成され、受光部52及び54は、例えばフォトトランジスタ、例えば赤外線発光ダイオード51,53が発生する光の波長域に感度を有するフォトトランジスタで構成されている。
【0027】
発光部51、53は例えば図5及び図6に示すように第1の保持板56に保持されて、下向きに光を発するように配置され、受光部52,54は第1の保持板56の下側に第1の保持板56に平行に配設された第2の保持板57に保持されて、上からの光を受けるように配置されている。
【0028】
第1の保持板56の後側の縁56bと第2の保持板57の後側の縁57bは、垂直に延びた第3の保持板58に固定され、第3の保持板58により連結されている。
第2の保持板57の手前の縁57cは、第3の保持板58に平行に形成されて、第2の保持板57の上面57aにあって、該第1の保持板56の後側及び前側の縁56b及び56cに平行な線50の第1の点(第1の位置)50aを、第1の発光部51から発して第1の受光部52に受けられる、光軸51xに沿う光束が通過し、上記の線50上の第2の点(第2の位置)50bを、第2の発光部53から発して第2の受光部54に受けられる、光軸52xに沿う光束が通過する。さらに上記線50上の第3の点(第3の位置)50cを、撮像部60の光軸1x、即ちレンズ1の光軸1xが通過する。言い換えると、レンズ1の光軸1xは、第1の受光部52を始点として、第2の受光部54を終点とするベクトルの延長線上の点(撮像位置)50cを通るものであり、被検査体61は撮像位置50cを通過するときに固体撮像素子2により撮像されて、固体撮像素子2の撮像面2a上に被写体像61zが形成される。被検査体61が矢印MVの方向に移動すると、これに伴い撮像面2a上で被写体像61zが矢印ZVの方向(矢印MVと反対の方向)に移動する。
【0029】
被検査体61は例えば人の手の指、例えば人さし指(第二指)であり、第二指が、第1の保持板56と第2の保持板57の間を矢印MVで示す方向に移動可能であり、また、第1の保持板56と第2の保持板57は指一本を通過させるだけの間隔で配設されており、従って指61の上下方向UDの動きが規制されている。また、図7に示されるように、指先61aが、第3の保持板58の前側の面58aに当接し、これにより指61の前後方向LTの動きが規制されている。
【0030】
このように、第1、第2及び第3の保持板56、57及び58は、被検査体としての指の動きを一軸方向に、即ち、第1の位置50aを始点として、第2の点50bを終点とするベクトルと平行な方向に、制限し案内する手段としての機能を有する。
【0031】
被検査体が第1の受光部52の位置(第1の位置)、第2の受光部54の位置(第2の位置)の順に通過し、その後レンズ1の光軸1x上の位置(撮像位置)50cまで移動したときに被検査体を撮像する。撮像を可能にするため、第2の保持板57のうちの、レンズ1の光軸1xの周囲の部分は、透明な板57dで形成されている。なお、透明な板57dとする代わりに、開口を設けても良い。
【0032】
第1のセンサ9と第2のセンサ10とで、後に図9を参照して詳しく説明する被検査体検出手段41が構成される。
【0033】
CPU7は本撮像システムを総括して制御を行うとともに、各種演算を実施する手段として機能している。信号処理部5からの映像信号データに基づき、自動露光制御(AE)/自動ホワイトバランス制御(AWB)を行うとともに、アナログ信号処理部3に対する増幅利得の設定、タイミングジェネレータ8で生成される固体撮像素子2の駆動用パルスの発生の制御、ならびにレンズ駆動部12の制御信号の生成を行う。
【0034】
積算部11は、信号処理部5から入力される1画面分の映像信号の積算を行う。積算結果は、撮像画像の明るさを表すものであり、CPU7はこれに基づいて、オーバーフロードレインパルスOFDの生成を制御し、これにより電荷蓄積時間の制御を行う。
【0035】
CPU7はさらに、図9に示す演算手段42a及び42bの機能をも有する。
演算手段42aは、被検査体検出手段41で被検査体の通過を検出すると、被検査体の第1及び第2のセンサ9、10間の通過時間(通過時間差)を算出し、撮像位置50cにおける被検査体の移動速度を推定する。例えば、第1及び第2のセンサ9,10間の距離を通過時間で割ることにより得られる第1及び第2のセンサ9,10間の平均移動速度を、撮像位置50cにおける移動速度と推定する。
被検査体検出手段41と演算手段42aとで、撮像位置50cにおける被検査体の移動速度を推定する速度推定手段43が構成されている。
演算手段42bは、推定された移動速度が高いほど像ぶれ補正を行うフレーム期間の電荷蓄積時間の分割数Nを多くするよう制御するとともに、像ぶれ補正を開始するタイミングを決定する。このため、第2のセンサ10の位置(第2の位置)から撮像位置50cまでの距離を上記平均移動速度で割ることにより前記被検査体が第2の位置から撮像位置50cに移動する時間を求め、この時間を、被検査体が第2の位置を通過した時刻(タイミング)に加算することにより、被検査体61が撮像位置50cを通過する時刻(タイミング)を推定し、このタイミングよりも、推定誤差や固体撮像素子の動作の遅れを考慮した時間余裕分以上前の始まるフレーム期間のタイミングを像ぶれ補正を開始するタイミングと決定する。このような制御により、被検査体の推定移動速度が高いほど、被検査体が第2のセンサ10を通過してから像ぶれ補正を行うまでの時間は短くされる。
【0036】
CPU7(演算手段42b)は決定された像ぶれ補正を行うタイミング、並びに像ぶれ補正における電荷蓄積時間の分割回数及び転送量に基づき制御信号を生成する。タイミングジェネレータ8は、図9に示すタイミング生成手段44として機能するものであり、CPU7が生成する制御信号に基づき、垂直転送部22(図2参照)内で電荷を移動させるための垂直転送パルスVDP、水平転送パルスHDP、読み出しパルスTGを生成し、固体撮像素子2へ出力し、垂直転送部22(図9の電荷移動手段45)を制御する。
【0037】
図2及び図3に示される、固体撮像素子2の垂直転送部22内の電荷を順方向に転送する具体的な手法を、垂直転送パルスVDPの電位変化のタイミングチャートである図10および図11を用いて説明する。図10は、各電極の垂直転送パルスVDPの4相のパルスφVi(i=1、2、3、4)のタイミングチャートであり、横軸に時刻を、縦軸に4つの電極26a〜26dに与えられる電位を並べて示している。図11は、図10に示す垂直転送パルスVDPを各電極に与えた時の、電荷移動の様子を示す図である。図11において、横軸は垂直転送部22の転送素子23の電極26a〜26dの位置を示し、縦軸には各電極の電子のポテンシャルエネルギーφi(=−eφVi)と電荷QCの分布の経時変化(異なる時刻t=a1乃至a9における電荷分布)が示してある。
【0038】
次に動作を説明する。図10において、時刻a1では電極26bの電位φV2と電極26cの電位φV3が+Vであり、電極26aの電位φV1と電極26dの電位φV4が0Vであるため、図11に示すように、電極26bと電極26cに電位井戸が形成されて電荷QCが蓄積される。次に時刻a2にて電極26dにバイアス電圧+Vを印加すると、電極26bと電極26cにあった電荷QCは、電極26bから電極26dに拡散する。次に時刻a3にて電極26bを無バイアスにすると、電荷QCは電極26cから電極26dに収束し、結果として、時刻a1からa3において、電荷QCは順方向(図11において右方向)へ1電極分だけ移動したことになる。
【0039】
時刻a4では電極26aにバイアス電圧+Vを印加し、時刻a5で電極26cを無バイアスにすることにより、電荷QCはさらに1つの電極分だけ順方向に移動する。時刻a6では電極26bにバイアス電圧+Vを印加し、時刻a7で電極26dを無バイアスにすることにより、電荷QCはさらに1つの電極分だけ順方向へ移動する。時刻a8では電極26cにバイアス電圧+Vを印加し、時刻a9で電極26aを無バイアスにすることにより時刻a1の状態と同じになる。すなわち、時刻a1から時刻a9において、1画素分電荷QCを順方向へ移動したことになる。
【0040】
他方、垂直転送部内の電荷QCを逆方向に転送する場合に関して、図12および図13を用いて説明する。電荷QCを順方向に転送する場合の説明に用いた図10が図12に、図11が図13にそれぞれ対応している。また、時刻a1からa9は、b1からb9にそれぞれ対応している。
【0041】
次に動作を説明する。図12において、時刻b1では電極26bと電極26cにバイアス電圧+Vが掛かり、電極26aと電極26dは無バイアスで0Vであるため、図13に示すように、電極26bと電極26cに電位井戸が形成されて電荷QCが蓄積されている。次に時刻b2にて電極26aにバイアス電圧+Vを印加すると、電極26bと電極26cにあった電荷QCは、電極26aから電極26cに拡散する。次に時刻b3にて電極26cを無バイアスにすると、電荷QCは電極26aから電極26bに収束し、結果として、時刻b1からb3において、電荷QCは逆方向(図13において左方向)へ1電極分だけ移動したことになる。
【0042】
時刻b4では電極26dにバイアス電圧+Vを印加し、時刻b5で電極26bを無バイアスにすることにより、電荷QCはさらに1つの電極分だけ逆方向に移動する。時刻b6では電極26cにバイアス電圧+Vを印加し、時刻b7で電極26aを無バイアスにすることにより、電荷QCはさらに1つの電極分だけ逆方向へ移動する。時刻b8では電極26bにバイアス電圧+Vを印加し、時刻b9で電極26dを無バイアスにすることにより時刻b1の状態と同じになる。すなわち、時刻b1から時刻b9において、1画素分電荷を逆方向へ移動したことになる。
【0043】
本実施の形態においては、上述したように、電荷の拡散ステップ後に収束ステップを行ない、これを繰り返すことで電荷の転送を実現しているが、拡散と収束のステップを同時に行なっても電荷の転送は可能である。例えば、図11の時刻a2の拡散と時刻a3の収束を同時に行なう、すなわち電極26dへのバイアス電圧印加と電極26bの無バイアス化を同時に行なうことによっても同様の電荷の転送は達成できる。あるいは、図11において時刻a3の収束と時刻a4の拡散を同時に行なっても、同様に電荷の転送が可能である。
【0044】
さらに、本実施の形態では4相の垂直転送パルスVDPによって電荷を転送しているが、4相に限るものではなく、3相以上であれば、同様の方法により電荷の転送は可能である。同様に水平転送パルスHDPについても2相のものを用いているがこれに限るものではない。
【0045】
図14(a)〜(f)、図15(a)〜(f)及び図16(a)〜(f)は本実施の形態における認識装置の動作を示すタイミングチャートであり、読み出し回数(電荷蓄積期間の分割数)Nが4である場合を示している。
図15(a)〜(f)は、図14(a)〜(f)のうちの電荷蓄積期間の分割による像ぶれ補正を行うフレーム及びその直前のフレームをより詳細に示し、図16(a)〜(f)は、図15(a)〜(f)において、の電荷蓄積期間の分割による像ぶれ補正を行うフレーム期間を時間軸方向に拡大して示す。
【0046】
図14(a)、図15(a)及び図16(a)は垂直同期信号VDを示す。図14(b)は第1のセンサ9の出力信号DT1を示し、図14(c)は第2のセンサ10の出力信号DT2を示す。
【0047】
図14(d)、図15(b)及び図16(b)のオーバーフロードレインパルスOFDは水平同期信号に同期してタイミングジェネレータ8から固体撮像素子2のオーバーフロードレイン電極(図示されていない)に印加されるものであり、AE制御において電荷蓄積期間を調整するために光電変換素子21に蓄積された電荷を固体撮像素子2内の基板上に排出することにより電子シャッタ機能を実現するものである。なお、図15(b)のオーバーフロードレインパルスOFDのうち、図15(b)に示される最初のパルスOFD1(垂直同期信号VDの立ち上がりと同時又はその直後に(立ち上がりの後最初に)発生されるもの)以外のパルスを、電子シャッタパルスと呼ぶこともある。
【0048】
図14(e)、図15(c)及び図16(c)は光電変換素子21において光電変換ならびに電荷蓄積を行う期間PDを示している。この期間PD(図14(e)及び図15(c)においてそれぞれ符号SS(i)、SS(j)、SS(k−2)、SS(k−1)などで示されている)は、各フレーム期間において、オーバーフロードレインパルスOFDの発生が終わった後に開始され、次の垂直同期信号VDの立ち上がりまで続く。言い換えると、電荷蓄積期間が与えられた長さとなるように、オーバーフロードレインパルスOFDの列の発生を終了する時点が決められる。
図14(f)は、電荷蓄積期間の分割により像ぶれ補正を行うフレームと行われないフレームをそれぞれ「ON」、「OFF」で示す。
【0049】
図15(d)及び図16(d)は読み出しパルスTGを示す。この読み出しパルスTGは、光電変換素子21で蓄積した電荷を垂直転送部22の対応する転送素子23へ読み出す(転送する)ため、読み出しゲート25の制御に用いられる。
図15(e)及び図16(e)は垂直転送パルスVDP(φV1〜φV4を示し、図15(f)及び図16(f)は水平転送パルスHDP(φH1、φH2)を示している。
【0050】
像ぶれ補正を行うフレーム期間(図中の第3のフレームFP(k))の1つ前までのフレーム期間では、被写体(被検査体がまだ撮像位置に到達していない状態では、被検査体が通過する位置の背後にあるものが被写体となっている)の明るさに基づいて、露出条件の一つとして定められる電荷蓄積期間SSi(i=1、2、…)を設定して、撮像を行う。例えば図15(a)〜(f)に示すように、ある垂直同期信号VDが発生される第1の垂直ブランキング期間VB(k−2)で始まるフレーム(第1のフレームFP(k−2))内の電荷蓄積期間SS(k−2)に蓄積した電荷は、当該第1のフレームFP(k−2)の次のフレーム(第2のフレーム(FP(k−1))の先頭の垂直ブランキング期間VB(k−1)内に発生される読み出しパルスTG10によって垂直転送部22へ読み出され、上記第2のフレームFP(k−1)内の期間100bに垂直転送部22内で水平転送部27に向けて転送される。複数の垂直転送部22内で同時に水平転送部27に向けた転送が行われる。撮像面上の水平方向に整列した複数の画素、即ち同じライン上の複数の画素をそれぞれ構成する複数の光電変換素子21から読み出された信号電荷が同時に、それぞれの垂直転送部22により転送される。言換えると、光電変換部20のそれぞれの光電変換素子列21から垂直転送部22に転送された信号電荷は水平転送部27へ向けて1ラインずつ順々に転送される。そして、同じ第2のフレーム期間FP(k−1)内において、垂直転送部22から水平転送部27に転送された電荷が、期間101bにおいて、水平転送部27内を出力増幅器28に向けて転送され、出力増幅器28で増幅されて出力される。
【0051】
第2のフレーム期間FP(k−1)の次のフレーム期間(第3のフレーム期間FP(k))において、像ぶれ補正を行うものとすると、第2のフレーム期間FP(k−1)内の電荷蓄積期間SS(k−1)に蓄積された電荷は、次の垂直ブランキング期間VB(k)の最初(垂直同期信号VDの立ち上がりと略同時)にオーバーフロードレインパルスOFD1を固体撮像素子2へ印加することにより垂直転送部22へ転送されることなく基板上に排出される。なお、垂直ブランキング期間内において、AE制御により電子シャッタパルス(OFD1以外のオーバーフロードレインパルスOFD)が発生される場合は、オーバーフロードレインパルスOFD1は必ずしも必要ではない。読み出しパルス(垂直ブランキング期間VB(k−1)内のTG10のごときもの)の発生を禁止すれば垂直転送部22への信号電荷の読み出しが禁止されるので、AE制御による電子シャッタパルスの発生の時点で、蓄積された電荷が基板上に排出されるためである。
【0052】
フレーム期間FP(k)は、静止画像として記録する画像用の映像信号を得るための電荷蓄積を行う期間である。このフレーム期間FP(k)において電荷蓄積期間を複数個(N個)の期間(分割蓄積期間)に分割して分割蓄積期間ごとに垂直転送部22への電荷読み出しを行うことにより電荷が複数回(N回)に分けて読み出される。各回に読み出される1画面分の電荷の集合を便宜上「画像」或いは「電荷画像」と呼ぶことがある。
【0053】
該複数の画像は最終的に1枚の画像に合成されて固体撮像素子から出力されるが、それまでは前記複数の画像を構成する画像のうち、第1の分割蓄積期間に読み出した画像(第1の画像)を垂直転送部22内に一時保持した後、第2の分割蓄積期間に読み出した画像(第2の画像)を垂直転送部22に読み出すまでの間に、色フィルタを備えた固体撮像素子2を用いる場合は、前記第1の画像を色フィルタの繰り返しパターンの周期に対応する最小画素数だけ移動させ(転送させ)、色フィルタを備えない固体撮像素子2を用いる場合は1以上の整数画素数だけ移動させる。その後該画像に前記第2の分割蓄積期間に読み出した画像(第2の画像)と加算した後一時保持する。それ以降同様の処理を繰り返し、最後に読み出す画像(第Nの画像)を加算するまで繰り返す。
【0054】
読み出し回数Nは演算手段42b(CPU7で構成される)により決定される。演算手段42bは、演算手段42aで求められた、撮像位置50cにおける被検査体の推定移動速度に応じて像ぶれを補正するための電荷移動量と読み出し回数Nを決定するものであり、画素数を単位とする、固体撮像素子2の撮像面上の被検査体の移動量(画素数で表された、推定された移動速度に比例する)をPn、分割蓄積期間ごとに垂直転送部22内で電荷を転送する量(画素数で表された転送量)をPTとすると、N=Pn/PTと表わされる。固体撮像素子2の撮像面上の被写体像の移動量Pnが大きいほど、また分割蓄積期間ごとの電荷転送量PTが小さいほど、読み出し回数Nの値は大きくなる。例えば、Pnが一定であれば、分割蓄積期間ごとの電荷転送量を、色フィルタの繰り返しパターンの周期に対応する最小画素数(以後、PT(m)ということもある)とすることにより、読み出し回数Nは最大となる。例えば、色フィルタとして図4に示すベイヤ型のものを使用した場合、PT(m)は2(画素)である。この場合、動き検出手段32で検出された固体撮像素子2上の被検査体の移動量Pnが8画素に相当するときには、読み出し回数N(=Pn/PT)は4となる。色フィルタを備えない白黒の固体撮像素子の場合はPT(m)=1であり、このとき読み出し回数Nは8となる。
【0055】
読み出し回数(電荷蓄積期間の分割数)N=4である場合において、図15(c)及び図16(c)に示すように、1つの電荷蓄積期間を等分に分割した期間(分割蓄積期間)をそれぞれS1〜S4とする。この場合、分割蓄積期間S1〜S4で蓄積した電荷をそれぞれ読み出しパルスTG1〜TG4(図15(d)及び図16(d))にて垂直転送部22へ読み出している。図15(e)及び図16(e)の符号102a〜102cは、それぞれ読み出しパルスTG1〜TG3にて読み出した電荷をそれぞれ垂直転送部22内で順方向または逆方向へ所定の画素数分だけ転送する期間を示す。
【0056】
図15(e)及び図16(e)のように符号102a〜102cで表される3つの電荷転送期間がある場合、それぞれの期間において全像ぶれ量の1/4に比例して電荷転送を行うため、該3つの電荷転送期間の合計として全像ぶれ量の3/4を補正する。ただし全像ぶれ量の1/4はそのまま残るため、結果として像ぶれが1/4に軽減されたことになる。一般的に、電荷蓄積期間の分割数をNとすれば、像ぶれを1/Nに軽減することができる。
【0057】
即ち、読み出し回数(電荷蓄積期間の分割数)Nが大きいほど、像ぶれ補正効果も大きくなる。動き検出手段32で検出された一定の動き量Pnに対して、Nを最大とするためには、分割蓄積期間ごとの電荷転送量PTが最小であればよい。そのため本実施の形態では、垂直転送部22内で電荷を転送する画素数(分割蓄積期間ごとの電荷転送量)について、色フィルタを備えたカラーの固体撮像素子を用いる場合は、色フィルタの繰り返しパターンの周期に対応する画素数の最小値PT(m)、色フィルタを備えない白黒の固体撮像素子を用いる場合は1画素とする。
【0058】
通常、本実施の形態のような像ぶれ補正によらずに記録画像の像ぶれを1/2に軽減するためには、露光の絞りを1段開く(F値を1段階大きな値に設定する)、言い換えれば固体撮像素子に取り込む光量を2倍にして電荷蓄積期間(シャッタースピード)を1/2にすることで可能となるが、本実施の形態では露光の絞りを1段開くことなしに像ぶれを1/2に軽減できる。
一般的に、電荷蓄積期間の分割数をNとした場合は、N回の画像の読み出しを行い、N枚の画像の合成を行うことにより、露光の絞りをlog2N段大きくしたのと同等の補正効果を期待できる。
【0059】
なお、像ぶれがまったくない、あるいは十分に小さい(所定の閾値以下である)場合は、分割蓄積期間が終わるごとに垂直転送を行う必要がないため、垂直転送パルスVDPは印加されず、図15(e)及び図16(e)に示した垂直転送のための期間102a〜102cは存在しない。この場合は例えば読み出したN枚の画像をそれぞれ移動することなく、読み出した状態のまま加算して最終的に一枚の画像を得る。
【0060】
図15(f)及び図16(f)において、符号110は、垂直転送期間102a〜102cにおいて垂直転送部22内の電荷を水平転送部27方向に転送することによって水平転送部27に押し出された後、水平転送部27に蓄積された余分な電荷を掃き捨てる、即ち、水平転送部27内の蓄積電荷を(次の垂直転送に先立って)ゼロにするための期間である。
【0061】
なお、図15(a)〜(f)及び図16(a)〜(f)の例では、フレーム期間FP(k)にオーバーフロードレインパルスOF1を印加しているが、代わりに、垂直ブランキング期間VB(k)に読み出しパルスTGを読み出しゲート25に印加することにより、電荷蓄積期間SS(k−1)で蓄積された全電荷を垂直転送部22に読み出した後、水平転送部27への高速転送し、さらに水平転送部27で高速転送することによって掃き捨てを行うこととし、これによりオーバーフロードレインパルスOFD1を不要とすることも可能である。
また、像ぶれ補正を行ったフレーム期間FP(k)の次のフレーム期間FP(k+1)における水平転送期間101cで電荷転送を行う際の最初の、1ラインを破棄するようにすれば、ブランキング期間VB(k+1)の水平転送期間110を不要とすることができる。
さらに本実施の形態では電子シャッタパルスによる電荷蓄積期間の調節を行っているが、機構式のシャッタを設けることにより、シャッタが開いている間だけ電荷蓄積を行うようにすることもできる。
【0062】
撮像時に像ぶれをおこしたときの撮像画像(被写体像)、ならびに固体撮像素子2の撮像面上における被写体像の詳細を図17(a)乃至(j)に示す。本例は被検査体が第1の方向(図17(b)の下方向)に移動したことにより像ぶれをおこした場合であり、分割蓄積期間数が4、垂直方向の像ぶれの画素換算数Pnが4・PTである場合を示している。図17(a)は被検査体を撮像レンズ上方で静止させて撮像したものであり、像ぶれが生じていない場合を示す。図17(b)は、図15(c)における符号SS(k−2)、SS(k−1)で示す場合と同様に、電荷蓄積期間を分割せず、且つ像ぶれ補正を行なわない場合の撮像画像であり、垂直方向にPn=4・PT画素分の像ぶれが発生している。
【0063】
図17(c)〜(f)は、図17(b)の画像を4つの分割蓄積期間に分割して取得したそれぞれの画像であり、それぞれ分割蓄積期間S1、S2、S3、S4において電荷蓄積を行うとともに、分割蓄積期間ごとに全画素を読み出すと仮定した場合に得られる撮像画像を示している(実際には、分割蓄積期間ごとの画像が固体撮像素子から外部に読み出されるわけではなく、垂直加算部で加算された後外部に読み出される)。分割蓄積期間S1〜S4は互いに同じ長さであり、図17(c)〜(f)の撮像画像の輝度は、いずれも図17(b)の撮像画像の輝度の1/4となる。
【0064】
図17(c)〜(f)の各々において、点線と実線の差は各分割蓄積期間中のぶれを表す。本実施の形態1は、相前後して得られる画像間に存在するPT画素分のずれを逐次補正して加算(合成)するものであり、即ち、図17(c)の画像をPT画素分だけシフトして図17(d)の画像と合成して第1の合成画像を形成し、この第1の合成画像をさらにPT画素分だけシフトして図17(e)の画像と合成して第2の合成画像を形成し、この第2の合成画像をさらにPT画素分だけシフトして図17(f)の画像と合成して第3の合成画像(最終的な合成画像)を形成するものであり、これにより、図17(f)の撮像画像と略同位置に被写体像が位置する画像(図17(f)の被写体像に、図17(c)〜(e)の被写体像をそれぞれシフトした上で合成した(重ね合わせた)のと同じ画像)を最終的な撮像画像として固体撮像素子2から出力するものである。
【0065】
図17(g)〜(j)はレンズを通して被検査体を固体撮像素子2の撮像面上に投影したときの被写体像を示しており、それぞれ対応する図17(c)〜(f)の画像とは、上下左右が反対の関係にある。
【0066】
図17(g)〜(j)の被写体像について、便宜上像ぶれによる尾引き部分を描画していないが、実際には図17(c)〜(f)の被写体像と同様の像ぶれによる尾引き部分が存在する。分割蓄積期間数が4であれば、総像ぶれ量の1/4の像ぶれが各分割蓄積期間の画像ごとに発生する。
なお、分割蓄積期間数が8であれば各分割蓄積期間の画像には総動き量の1/8の像ぶれが発生することになる。
【0067】
被検査体が前記の第1の方向と反対方向(第2の方向)に移動した場合、図17(g)、(h)、(i)、(j)の、上下左右反転した撮像面上の被写体像は上方向に移動する。図17(g)、(h)、(i)、(j)中の符号d1、d2、d3、d4で示す「*」印は被検査体(人さし指)上の同じ箇所における1画素を示しており、以下この画素に注目して垂直転送部22内における電荷転送の詳細を図16(a)〜(f)および図18(a)〜(j)を用いて説明する。
【0068】
図16(a)〜(f)には、それぞれの動作に対し、時系列に、符号TSaからTSkが割り当られている。これら動作TSa〜TSkが行われる時点における垂直転送部22内の電荷転送の様子を、図18(a)〜(h)を参照して説明する。
【0069】
図18(a)〜(h)は、図17(g)〜(j)に示すように、固体撮像素子2の撮像面上で被検査体が上方向に移動した際の垂直転送部22内における電荷転送による像ぶれ補正の方法を示している。図2および図3と同様に、図18(a)〜(j)において、各光電変換素子列20は複数の光電変換素子21を含み、垂直転送部22は複数の転送素子23を含む。各転送素子23は画素に対応するものであり、4つの転送電極を備えているが、図18(a)〜(h)ではこの点の図示を省略している。
読み出しゲート部24の読み出しゲート25の各々は、各光電変換素子21と対応する転送素子23の間に設けられている。
まず図18(a)に示すように、最初の分割蓄積期間S1(TSa)において、注目画素(図17(g)のd1)に対応する光電変換素子21(1)で光電変換を行って電荷d1を蓄積する。
【0070】
次に図18(b)に示すように、読み出しパルスTG1により分割蓄積期間S1中に光電変換素子21(1)に蓄積された電荷d1を垂直転送部22の対応する転送素子23(1)に読み出す(TSb)。
この電荷読み出しが終了した直後から図18(c)に示すように、2番目の分割蓄積期間S2において注目画素の光電変換素子21(2)における電荷d2の蓄積(TSc)を開始し、この電荷蓄積(TSc)中に、動作TSbにより垂直転送部22に読み出され電荷を転送素子23(1)からPT画素分上方向に、即ち転送素子23(2)に移動させる(TSd)。
次に図18(d)に示すように、読み出しパルスTG2により光電変換素子21(2)の電荷d2(分割蓄積期間S2中に光電変換素子21(2)に蓄積された電荷d2)を垂直転送部22の対応する転送素子23(2)に読み出し、垂直転送部22内で、転送素子23(1)から転送素子23(2)に移動した電荷d1と加算する(TSe)。
【0071】
この電荷読み出し及び加算が終了した直後から図18(e)に示すように、3番目の分割蓄積期間S3において注目画素の光電変換素子21(3)における電荷d3の蓄積(TSf)を開始し、この電荷蓄積(TSf)中に、動作TSeにおいて垂直転送部22の転送素子23(2)内で加算した電荷(d1+d2)を転送素子23(2)からPT画素分上方向に、即ち転送素子23(3)に移動させる(TSg)。
次に図18(f)に示すように、読み出しパルスTG3により光電変換素子21(3)の電荷d3(分割蓄積期間S3中に光電変換素子21(3)に蓄積された電荷d3)を垂直転送部22の対応する転送素子23(3)に読み出し、垂直転送部22内で、転送素子23(2)から転送素子23(3)に移動した電荷(d1+d2)と加算する(TSh)。
【0072】
この電荷の読み出し及び加算が終了した直後から図18(g)に示すように、4番目の分割蓄積期間S4において注目画素の光電変換素子21(4)における電荷d4の蓄積(TSi)を開始し、この電荷蓄積(TSi)中に、動作TShにおいて垂直転送部22の転送素子23(3)内で加算した電荷(d1+d2+d3)を転送素子23(3)からPT画素分上方向に、即ち転送素子23(4)に移動させる(TSj)。
次に図18(h)に示すように、読み出しパルスTG4により光電変換素子21(4)の電荷d4(分割蓄積期間S4中に光電変換素子21(4)に蓄積された電荷d4)を垂直転送部22の対応する転送素子23(4)に読み出し、垂直転送部22内で、転送素子23(3)から転送素子23(4)に移動した電荷(d1+d2+d3)と加算する(TSk)。
その後全画素のデータを矢印Ymで示すように、水平転送部27へ転送する(図16(e)の100c)と同時に、水平転送部27内で出力増幅器部28へ向けて、信号電荷の転送を行う(図16(f)の101c)。
以上の動作により、像ぶれの低減された画像データを得ることが可能となる。
【0073】
なお、上記の例では、被検査体の移動に伴う像の移動の向きが図18で上向きであり、像ぶれ補正のための垂直転送部22内での電荷移動の方向も上向きであり、一方、水平転送部27への転送のための電荷移動は下向きであるが、像ぶれ補正のための垂直転送部22内での電荷移動の方向が、垂直転送部22から水平転送部27への転送のための電荷移動の方向と一致するように、固体撮像素子の向きを決めておくこととしても良い。そうすれば、垂直転送部22から水平転送部27への転送のための電荷移動の距離を短くすることができ、そのための時間を短縮し、また電荷移動に伴う電荷の損失を削減することができる。
【0074】
次に、第1及び第2のセンサ9,10による被検査体の移動速度の検出及び検出結果に基づく固体撮像素子の制御について説明する。
第1及び第2のセンサ9,10が図5,図6及び図8に示されるように構成されている場合、発光部51,53と受光部52、54の間を通過する際の被検査体61の位置に応じて、第1及び第2のセンサ9,10の出力は変化する。具体的には、被検査体61(人さし指、特にその先端に近い部分)が受光部52,54上を通過する際に、発光部51,53からの光を遮光することで、受光部52,54の検出出力は、H(光がある場合の出力信号の論理)からL(光がない場合の出力信号の論理)へと変化する。
【0075】
続いて、受光部52,54の上方を、被検査体61が通過し終わり、発光部51、53からの光を受光部52,54で受光する。受光部52,54の検出出力は、L(光がない場合の出力信号の論理)からH(光がある場合の出力信号の論理)へと変化する。
【0076】
演算手段42aは、センサ9の出力がHからLへ変化した時刻、及びセンサ10の出力がHからLへ変化した時刻より、被検査体61の第1及び第2の位置50a、50b間の被検査体61の通過時間(時間差)を求め、撮像位置50cにおける被検査体の推定移動速度を求め、演算手段42bは、この推定された移動速度を元にして、電荷蓄積期間の分割数Nを算出し、タイミング生成手段43へ出力し、第2の位置50bを通過してから撮像位置50cに達するまでの時間(遅延フレーム数Df)を推定する。
【0077】
続いて、タイミング生成手段44は、演算手段42bで算出した電荷蓄積期間の分割数を設定する制御信号出力から、像ぶれ補正を行うフレーム期間における固体撮像素子2の駆動パルスを生成する。演算手段42bからタイミング生成手段44への制御信号とは、例えば3線シリアル通信を用いて設定された、電荷蓄積期間の分割数を示すバイナリデータである。タイミング生成手段44は、FPGA(Field Programmable Gate Array)、ゲートアレー、ICなどのハードウェアにて実現できる。電荷移動手段45は垂直転送部で構成され、タイミング生成手段44の駆動パルスにより、像ぶれ量に応じてぶれが補正される方向に電荷を移動させる。
【0078】
固体撮像素子2は、被写体像の光路がレンズやプリズム等の光学系によりいかなる方向に屈折されていても、最終的に固体撮像素子2の撮像面に投影された被検査体の移動方向が固体撮像素子の垂直転送部における電荷転送方向と平行になるように配置される。
【0079】
固体撮像素子2は、受光部にて蓄積され、電荷読み出し期間に電荷読み出しパルスTGにて垂直転送部に読み出された電荷を、ぶれ量に応じた画素数(ライン数)だけ垂直転送パルスVDPで垂直転送する。図4に示されるV軸は、この垂直転送部22の電荷転送方向と一致している。一方、V軸と直交するH軸は、垂直転送部22から水平転送部27へ転送された電荷が、水平転送パルスHDPにより水平転送される方向と一致する。
【0080】
以下に、図5、図6及び図8の構成を用いた場合について、認識装置の詳細な動作と、像ぶれ量と電荷移動量制御の関係について説明を加える。
【0081】
被験者は、被検査体61(ここでは、指)を認識装置の保持板56、57の間に挿入し、矢印MVの方向へ移動させる。指61は、第1のセンサ9を通過する際、発光部51からの光を遮光するため、第1の受光部52の出力が、Lへと遷移する。指61はさらに、第2のセンサ10を通過する際、発光部53からの光を遮光するため、第2の受光部54の出力が、Lへと遷移する。
演算手段42aは、第1の受光部52の出力がHからLへと遷移した時刻をt1(ms)、第2の受光部54の出力がHからLへと遷移する時刻をt2(ms)としたときの、第1のセンサ9と第2のセンサ10間の通過時間τ(ms)を求める。通過時間τは、下式(1)で求められる。
τ(ms) = t2(ms)−t1(ms) …(1)
【0082】
なお、上記のように、第1のセンサ9を通過する時刻と第2のセンサ10を通過する時刻を検出する代わりに、第1のセンサ9を通過したときに計時を開始するタイマーを用いて、第2のセンサ10を通過するまでの時間を計時することとしても良い。
【0083】
第1の受光部52と第2の受光部54の間隔がd(mm)のとき、該2つの受光部間を被検査体である指が通過する際の通過速度v(m/s)は、
v = d/τ (m/s) …(2)
となる。撮像部が撮影を行う際のシャッタ開放時間(シャッタスピード)S(s)中の被検査体61の移動量Δxは、
Δx =v・S= d・S/τ (m) …(3)
で与えられる。
【0084】
ここで開放時間(シャッタスピード)S(s)は本認識装置で被写体像を撮像する際に像ぶれ補正を行うフレーム期間における電荷蓄積期間と同義である。
【0085】
図19に示すように、レンズ1から被検査体61までの距離(被写体距離)をh(mm)、レンズ1とCCDの撮像面2aまでの距離(像距離)をf(mm)とすると、被検査体61とCCDの撮像面2a上の被写体像との大きさにはh:fの関係がある。
被検査体がΔx移動した場合、CCD撮像面2a上では、被写体像が
Δx’ = Δx・f/h (m) …(4)
移動することになる。CCDの画素ピッチをPs(μm)とし、式(4)の距離Δx’を画素数Pnに換算すると、
Pn = Δx’/Ps = (d・S・f)/(τ・h・Ps) …(5)
と表される。
一例として、d=15(mm)、f=6(mm)、h=100(mm)、τ=200(mm)、S=1/30(s)、Ps=4.65(μm)であるとき、これらの値を式(5)に代入すると、Pn=33(画素)となる。
PnをPTで割ることにより、分割数Nが求まる。上記の例では、
Pn/PT=33/2=16.5であるので、小数点以下を切り捨てる処理、又は四捨五入する処理などの丸め処理により処理分割数Nを16又は17とする。
【0086】
なお、式(5)を変形すると、
Pn/Ps = d・f/τ・h・S
が得られる。上式は、撮像面上での画素数で表した画像の移動速度を求める式であり画素数で表した像ぶれ量Pnを求める演算は、撮像面上での被写体像の、移動速度(距離を画素数で表した移動速度)を求める演算と等価であるとも言える。
【0087】
被検査体が第2のセンサ10の位置(第2の位置)50bを通過してから撮像レンズ1の位置(撮像位置)50cまで移動する時間は、被検査体の通過速度が速いほど短い。そのため被検査体を画角中央で撮像するためには、通過速度に応じて像ぶれ補正の開始時期を制御する必要がある。図14(c)に示すように、時刻t2において、被検査体が第2のセンサ10を通過してから、ある遅延フレーム数(Df)が経過した後に像ぶれ補正を実施することとして、該遅延フレーム数Dfを制御する。具体的には、図8のように第2のセンサ10の位置(第2の位置)からレンズ1の中央までの距離をg(mm)、距離gの通過時間をβ(ms)とすると、被検査体を画角中心で撮像するためには、被検査体が第2のセンサ10を通過してからβ(ms)後の画像を撮像する必要がある。1フレーム期間がY(ms)であるとき、遅延フレーム数Dfは
Df=β/Y= g・τ/d・Y …(6)
となる。
ここでdは、上記と同様、第1のセンサ9から第2のセンサ10までの距離(mm)を表す。
遅延フレーム数Dfは1以上と整数であり、第2のセンサ10が被検査体の通過を検出した後の次のフレーム期間の始まりから、像ぶれ補正を行うフレーム期間の始まりまで(図14の両矢印付き線Dspで示す期間)の期間とする。
演算手段42bは、上記の式(5)、式(6)の計算を含む上記の処理により画素数で表された像ぶれ量Pn,分割回数N、遅延フレーム数Dfを求める。
【0088】
図20は、実施の形態1における像ぶれ補正の動作を示すフローチャートである。まず第1のセンサ9で被検査体の通過を検出したことにより第1のセンサ9の出力(第1の受光部52の出力)DT1がHからLに変化したかどうかを監視し(ステップSt0)、次に第2のセンサ10で被検査体の通過を検出したことにより第2のセンサ10の出力DT2がHからLに変化したかどうかを監視する(ステップSt1)。ステップSt0で第1のセンサ9の出力DT1がHからLになった時刻(t1)と、ステップSt1で第2のセンサ10の出力DT2がHからLになった時刻(t2)から演算手段42aにて第1及び第2のセンサ9,10間の被検査体の通過時間τ(ms)を算出する(ステップSt2)。
次にステップSt2で算出した被検査体通過時間τ(ms)と式(5)を用いて演算手段42bにて固体撮像素子2の撮像面における(画素数で表された)像ぶれ量Pnを算出する(ステップSt3)。
次に、算出した像ぶれ量Pnと、分割蓄積期間ごとに垂直転送部22内で電荷を転送する量PTより電荷蓄積期間の分割数N、すなわち読み出す画像数Nを決定するとともに遅延フレーム数Dfを式(6)より決定する(ステップSt4)。
【0089】
次に遅延フレーム数Dfの経過を監視する(ステップSt5)。延フレーム数Dfが経過すると、次に分割数Nが1か否かを判定する(ステップSt6)。N=1であれば画像を読み出し、光電変換素子列20の電荷を垂直転送部22に読み出し(ステップSt7)、次のフレーム期間に垂直転送部22内の全電荷を水平転送部27へ転送して(ステップSt16)、終了する。
【0090】
ステップSt6においてN=1でない場合は、ステップSt8に進み、分割したN画像のうち第1番目の画像から読み出す目的にてパラメータnをセットする(ステップSt8)。ここでパラメータnは、分割読み出しをN回繰り返す際の計数値として用いられているものである。次に第n番目の画像を光電変換素子列20から垂直転送部22に読み出す(ステップSt9)。初期状態(ステップSt9を最初に実行するとき)ではステップSt8によりn=1であるため、第1の画像を読み出すことになる。
【0091】
次に、色フィルタの繰り返しパターンの周期に対応して決まる固定値PTに応じた画像位置(画素数)だけ画像をシフトさせた後(ステップSt10)、垂直転送部22内に保持する(ステップSt11)。次に第(n+1)番目の画像を読み出す(ステップSt12)。初期状態では(即ち、ステップSt12を最初に実行するときは)該第(n+1)番目の画像とは第2の画像のことを指す。
【0092】
そして垂直転送部22内にそれ以前から保持されている画像と、光電変換素子列20から垂直転送部22に読み出されたばかりの画像とを加算する(ステップSt13)。これらの画像の加算は、画像のシフトが行われた垂直転送部22のそれぞれの転送素子23に、光電変換素子列20のそれぞれの光電変換素子21で蓄積された電荷を読み出すことにより、行われる。
【0093】
次にn=N−1か否かを判定する(ステップSt14)。n=N−1でない場合は、nに1を足して(ステップSt15)、ステップSt10に戻り、ステップSt10からステップSt14の処理を繰り返す。この繰り返しは、ステップSt14でn=N−1となるまで続けられる。n=N−1となれば次のフレーム期間に垂直転送部22内の全電荷を水平転送部27へ転送して(ステップSt16)、終了する。
【0094】
実施の形態2.
上記の実施の形態では、第1及び第2のセンサ9,10が、図5及び図6に示すように構成されているが、第1及び第2のセンサ9,10は、図21や図22に示すように構成することもできる。
【0095】
図21は、1つの発光部62と、2つの受光部52、54で構成した点が、図5及び図6とは異なるのみで、発光部からの光の遮光を検出して、演算手段42aで移動時間を推定するという基本的な動作は同じである。本例では被検査体検出手段41は、1つの発光部62と第1の受光部52と第2の受光部54とを備え、発光部62は第1の受光部52と第2の受光部54を結ぶ線に垂直な線上にあり、かつ第1の受光部52までの距離と第2の受光部54までの距離が等しい位置に配置されている。この構成をとることで、発光部の個数が減り、コスト削減ができる。
図21の構成においては、発光部62と第1の受光部52とで第1のセンサ9が構成され、発光部62と第2の受光部54とで第2のセンサ10が構成されており、発光部62が第1のセンサ9の一部であるとともに、第2のセンサ10の一部でもある。
【0096】
実施の形態3.
また、図22は、第1のセンサ9及び第2のセンサ10はそれぞれ反射型フォトセンサ(フォトリフレクタ)63,64で構成されている。フォトリフレクタ63は発光部63aと、受光部63bとで構成されており、発光部63aから出た光が被検査体で反射して受光部63bに入射するように配置され、同様にフォトリフレクタ64は発光部64aと、受光部64bとで構成されており、発光部64aから出た光が被検査体で反射して受光部64bに入射するように配置されている。
図22の構成の場合、被検査体が第1及び第2のセンサ9,10に対向する位置(第1、第2の位置)にないときには、発光部63a、64aからの光は、受光部63b、64bには入射せず、受光部63b、64bの出力がLである。被検査体が第1及び第2の第1及び第2のセンサ9,10に対向する位置(第1、第2の位置)にあるときは、発光部63a、64aからの光が被検査体で反射して受光部63b、64bに入射し、受光部63b、64bの出力がHとなる。
【0097】
演算手段42aでは、受光部63b、64bの出力からLからHに変化した時刻から受光部64bの出力がLからHに変化した時刻の時間を「通過時間」として検出し、この間の平均的移動速度を算出する。
なお、図21や図22に示す例でも、発光部62、63a、64aとしては、発光ダイオード例えば赤外線発光ダイオードで構成されたものを用い、受光部52、54、63b、64bとしては、フォトトランジスタ、例えば赤外線発光ダイオードが発生する光に感度を有するフォトトランジスタで構成されたものを用いることができる。
【0098】
実施の形態4.
上記の実施の形態では、被検査体が指であり、人が自分で指を動かす間に撮像を行って指紋などの生体情報の認識を行っているが、本発明はこれに限定されず例えばベルトコンベアにより搬送される物品の認識、例えば物品に付された2次元コードの認識を行う場合に適用することもできる。図23はそのような場合に用いられるセンサ及び撮像部の配置を示す。
【0099】
図23は移動するベルトコンベア66上に置かれ、矢印MVの方向に搬送される、梱包された物品67に貼り付けられた2次元コード68を認識する装置であり、2次元バーコードには物品に関する仕向け先や物品の内容等の情報が暗号化されている。
非接触にて2次元コード68を撮像し、後段の信号処理を行うことによりコードを解読できる。
被検査体検出手段41としての第1及び第2のセンサ9及び10は、例えば図5,図6及び図8の例で示したのと同様のフォトセンサでも良い。フォトセンサはそれぞれ発光部51、53と、発光部51、53からの光軸51x、53xに沿う光を受ける受光部52、54とを備えている。
撮像部60は図5及び図6に示したとの同様のレンズ1と固体撮像素子2を用いたものである。
【0100】
第1及び第2のセンサ9とセンサ10により被検査体(製品などの物品)の通過を検出し、検出結果に基づいて演算手段42aで移動速度を求め、該移動速度に応じて撮像部60内のCCD内にて像ぶれ補正を実施する。このため、ベルトコンベア66の移動速度が変化した場合でも、実際の移動速度(速度変化)に対応した良好な像ぶれ補正が可能である。また、2次元コード68はこれに限定されるものではなく、例えば1次元バーコードや写真等、本認識装置にて認識を行うものであればよい。
【0101】
実施の形態5.
本発明はまた、カードリーダにも適用可能である。図24は本発明をカードリーダに適用した場合のセンサ及び撮像部の配置を示す。図23の例ではベルトコンベアによって被検査体が移動していたが、図24では人がカード69を矢印MVの方向へ通すことにより認識を行う。撮像部60は図示しない照明手段等を具備し、撮像タイミングにて発光させることで照度を確保するように構成することもできる。その他基本動作と効果は図5,図6及び図8に示した例や図23に示した例と同じである。
【0102】
なお、式(6)により遅延フレーム数Dfを定める場合、図23の例では、物品67の前端、即ち移動に伴い最初にセンサの光を遮る部分が撮像部60の光軸1xの位置に達したときに撮像が開始されるが、2次元コード68が撮像部の光軸1xの位置に達したときに撮像が開始されるようにするには、物品67の前端67aと二次元コード68との間隔j(mm)を考慮に入れ、式(6)のgの代わりにg+jを代入した式を用いて遅延フレーム数Dfを求める。
【0103】
上記の実施の形態では、センサ9,10の光軸51x,53xと撮像部60の光軸1xが平行であるが、平行でなくても良い。例えば、図23に示す構成において、センサ9,10の光軸は上下方向に、撮像部1xの光軸は図示と同様に水平方向に配置されていても良い。
【0104】
なお、上記の実施の形態では、第1及び第2のセンサ9,10により移動速度を求めることとしているが、本発明はこれに限定されず、例えば被検査体の移動に伴って回転するローラの回転速度を検出することにより、被検査体の移動速度を検出するようにしても良い。
また、レーザ光を利用した距離計測用センサを用いて計測した距離に基づき、物品が所定位置を通過したことを検出しても良く、また計測した距離の変化に基づき移動速度を検出するようにしても良い。
【0105】
以上説明したように本発明の実施の形態1によれば、被検査体の移動を一軸方向に限定されるように支持したことにより、被検査体検出手段41の第1のセンサ9、同被検査体検出手段41の第2のセンサ10の順で被検査体通過の検出を行い、さらに被検査体が移動すると固体撮像素子上のレンズ前面の撮像位置50cを通過するように、被検査体検出手段41ならびに撮影レンズ1及び固体撮像素子2が配置されているため、被検査体検出手段41の検出結果に応じて即座に高精度な像ぶれ補正が実施可能である。
【0106】
また、固体撮像素子内部の電荷移動のみで像ぶれを低減、補正するため、アクチュエータ等の特殊な機構や外部メモリを必要とせず、低コストで認識装置を提供できる。
【0107】
特に、実施の形態1によれば、電荷転送量PTを固定値とし、像ぶれ量Pnに応じて分割数Nを増減させるようにしたので、分割数Nを最大にすることで、もっとも大きな像ぶれ補正効果を得ることができる。また、像ぶれ量Pnを電荷転送量PTで除算することで分割数Nを決定しているので、均等に像ぶれの補正を行うことができる。
【0108】
上記の実施の形態では、被検査体が撮像位置を通過すると推定されるタイミングで1フレーム期間だけ電荷蓄積期間の分割による像ぶれ補正を行っているが、上記推定タイミングのフレームのみならず、その直前又は直後、又はその両方のフレーム期間においても、電荷蓄積期間の分割による像ぶれ補正を行い、それぞれのフレーム期間の画像を用いた認識結果を総合的に判断しても良い。
【図面の簡単な説明】
【0109】
【図1】本発明の実施の形態1の認識装置の構成を示すブロック図である。
【図2】実施の形態1で用いられる固体撮像素子の構成を示す図である。
【図3】図2の固体撮像素子において縦方向に並んだ4画素を拡大して示す図である。
【図4】ベイヤ型色フィルタ配列を示す図である。
【図5】本発明の実施の形態1における認識装置のセンサ及び撮像部の配置を示す概略斜視図である。
【図6】図5の線50に沿う垂直断面図である。
【図7】図5の線VII−VII線断面図である。
【図8】本発明の実施の形態1における認識装置のセンサ及び撮像部の部材間の距離を示す概略平面図である。
【図9】実施の形態1において像ぶれ補正を行うための構成要素を示す機能ブロック図である。
【図10】垂直転送部内で順方向に電荷を転送する場合に印加される垂直転送パルスVDPを示すタイミングチャートである。
【図11】垂直転送部内で順方向に電荷を転送する場合の固体撮像素子の転送素子の電極の電位分布を示す図である。
【図12】垂直転送部内で逆方向に電荷を転送する場合に印加される垂直転送パルスVDPを示すタイミングチャートである。
【図13】垂直転送部内で逆方向に電荷を転送する場合の固体撮像素子の転送素子の電極の電位分布を示す図である。
【図14】(a)〜(f)は、実施の形態1の認識装置の動作を示すタイミングチャートである。
【図15】(a)〜(f)は、図14(a)〜(f)のうちに、電荷蓄積期間の分割による像ぶれ補正を行うフレーム期間及びその直前のフレーム期間をより詳細に示すタイミングチャートである。
【図16】(a)〜(f)は、図15(a)〜(h)のうちの、電荷蓄積期間の分割による像ぶれ補正を行うフレーム期間を時間軸方向に拡大して示すタイミングチャートである。
【図17】(a)〜(j)は、実施の形態1における被写体像と固体撮像素子の撮像面の被写体像の変位を示す図である。
【図18】(a)〜(j)は、実施の形態1における垂直転送部内の電荷転送ならびに電荷加算方法を示す図である。
【図19】被写体像とレンズとの距離及び被検査体の大きさと撮像面上での被写体像の大きさの関係を示す図である。
【図20】実施の形態1における像ぶれ補正動作を示すフローチャートである。
【図21】本発明の実施の形態2に係る認識装置のセンサ及び撮像部の配置を示す概略斜視図である。
【図22】本発明の実施の形態3に係る認識装置のセンサ及び撮像部の配置を示す概略斜視図である。
【図23】本発明の実施の形態4に係る認識装置のセンサ及び撮像部の配置を示す図である。
【図24】本発明の実施の形態5に係る認識装置のセンサ及び撮像部の配置を示す図である。
【符号の説明】
【0110】
1 レンズ、 2 固体撮像素子、 3 アナログ信号処理部、 4 画素信号A/D変換部、 5 信号処理部、 6 表示手段、 7 CPU、 8 タイミングジェネレータ、 9 第1のセンサ、 10 第2のセンサ、 11 積算部、 12 レンズ駆動部、 21 光電変換素子(PD)、 22 垂直転送部、 24 読み出しゲート部、 27 水平転送部、 28 出力増幅器、 41 被検査体検出手段、 42a 演算手段、 42b 演算手段、 44 タイミング生成手段、 45 電荷移動手段、 51 発光部、 52 受光部、 53 発光部、 54 受光部、 60 撮像部、 61 被検査体、 62 発光部、 63 フォトリフレクタ、 64 フォトリフレクタ、 66 ベルトコンベア、 67 物品、 68 2次元コード、 69 カード、 PX 画素。
【特許請求の範囲】
【請求項1】
移動する被検査体が所定の撮像位置を通過するときに、該被検査体からの光を受けて光電変換を行う光電変換部と、前記光電変換部で生成された電荷を転送する転送部とを備えた固体撮像素子と、
前記被検査体が前記撮像位置に達する前に順に通過する第1の位置及び第2の位置において、前記被検査体の通過を検出する被検査体検出手段と、
前記被検査体検出手段より検出した第1の位置の検出信号及び第2の位置の検出信号をもとに、前記固体撮像素子の撮像面上での像ぶれ量を推定し、像ぶれ補正を行うタイミングを決定する演算制御手段と、
前記推定された像ぶれ量に応じて該像ぶれを打ち消すように、前記光電変換部で生成された電荷を前記転送部内で転送させながら、電荷蓄積を行っての画像電荷を形成させる撮像素子駆動手段とを備えた
ことを特徴とする認識装置。
【請求項2】
前記撮像素子駆動手段は、
前記固体撮像素子の電荷蓄積時間中に、前記光電変換部で生成された電荷を、前記推定された像ぶれ量に応じた回数に分けて前記転送部に読み出し、読み出された電荷を前記転送部内で転送する処理を繰り返させることにより、前記像ぶれを打ち消すことを特徴とする
請求項1に記載の認識装置。
【請求項3】
前記撮像素子駆動手段は、
前記固体撮像素子の電荷蓄積時間中に、前記光電変換部で生成された電荷を複数回に分けて前記転送部に読み出し、読み出された電荷を前記転送部内で前記推定された像ぶれ量に対応した画素数分転送する処理を繰り返させることにより、前記像ぶれを打ち消すことを特徴とする
請求項1または請求項2に記載の認識装置。
【請求項4】
前記演算制御手段は、
前記被検査体検出手段により前記被検査体の前記第1の位置での検出及び前記第2の位置での検出の結果をもとに、前記撮像位置における前記被検査体の推定移動速度を求め、
該推定移動速度に基づき前記像ぶれ量の推定及び前記像ぶれ補正を行うタイミングの決定を行う
ことを特徴とする請求項1に記載の認識装置。
【請求項5】
前記演算制御手段は、
前記第1の位置及び第2の位置の間の距離を、前記第1の位置の検出信号及び第2の位置の検出信号の発生の時間差で割ることにより得られた速度を前記移動速度と推定する
ことを特徴とする請求項4に記載の認識装置。
【請求項6】
前記固体撮像素子上に配された前記撮影レンズは、その光軸が、前記第1の位置を始点として、前記第2の位置を終点とするベクトルの延長線上の点を通過するように配置され、
前記演算制御手段は、前記被検査体が前記第1の位置及び前記第2の位置の順に通過した後、前記撮像位置を通過する際に前記像ぶれ補正を行うタイミングを決定する
ことを特徴とする請求項1に記載の認識装置。
【請求項7】
前記被検査体が前記第1の位置を始点として、前記第2の位置を終点とするベクトルと平行な方向にしか移動しないように制限する制限手段をさらに備えたことを特徴とする請求項1に記載の認識装置。
【請求項8】
前記固体撮像素子の撮像面に形成された、前記被検査体の光学像の移動方向が、前記転送部における電荷の転送方向と平行となるように、前記固体撮像素子が配置されていることを特徴とする請求項1乃至7のいずか1項に記載の認識装置。
【請求項9】
前記被検査体検出手段は、前記被検査体の前記第1の位置の通過を検出する第1のセンサと、前記被検査体の前記第2の位置の通過を検出する第2のセンサとを備え、
前記第1のセンサ及び第2のセンサの各々は、互いに向き合うように配置された赤外線発光ダイオードと該赤外線発光ダイオードが発する光の波長域に感度を有するフォトトランジスタを備えたものである
ことを特徴とする請求項1に記載の認識装置。
【請求項10】
前記被検査体検出手段は、前記被検査体の前記第1の位置の通過を検出する第1のセンサと、前記被検査体の前記第2の位置の通過を検出する第2のセンサとを備え、
前記第1のセンサ及び第2のセンサは、共通の赤外線発光ダイオードを備え、
前記第1のセンサは、前記赤外線発光ダイオードが発する光の波長域に感度を有し、前記赤外線発光ダイオードが発する光を受けるように配置された第1のフォトトランジスタをさらに備え、
前記第2のセンサは、前記赤外線発光ダイオードが発する光の波長域に感度を有し、前記赤外線発光ダイオードが発する光を受けるように配置された第2のフォトトランジスタをさらに備えたものであり、
前記共通の赤外線発光ダイオードは前記第1のフォトトランジスタと第2のフォトトランジスタを結ぶ線に直交する線上にあり、かつ前記第1のフォトトランジスタまでの距離と前記第2のフォトトランジスタまでの距離が等しい位置に配置されている
ことを特徴とする請求項1に記載の認識装置。
【請求項11】
前記被検査体検出手段は、前記被検査体の前記第1の位置の通過を検出する第1のセンサと、前記被検査体の前記第2の位置の通過を検出する第2のセンサとを備え、
前記第1のセンサ及び第2のセンサの各々は、
互いに同じ方向を向くように設けられた赤外線発光ダイオードと、該赤外線発光ダイオードが発する光の波長域に感度を有するフォトトランジスタとを備え、
前記赤外線発光ダイオードが発する光が被検査体で反射したときにこれを受光するように前記フォトトランジスタが配置されている
ことを特徴とする請求項1に記載の認識装置。
【請求項1】
移動する被検査体が所定の撮像位置を通過するときに、該被検査体からの光を受けて光電変換を行う光電変換部と、前記光電変換部で生成された電荷を転送する転送部とを備えた固体撮像素子と、
前記被検査体が前記撮像位置に達する前に順に通過する第1の位置及び第2の位置において、前記被検査体の通過を検出する被検査体検出手段と、
前記被検査体検出手段より検出した第1の位置の検出信号及び第2の位置の検出信号をもとに、前記固体撮像素子の撮像面上での像ぶれ量を推定し、像ぶれ補正を行うタイミングを決定する演算制御手段と、
前記推定された像ぶれ量に応じて該像ぶれを打ち消すように、前記光電変換部で生成された電荷を前記転送部内で転送させながら、電荷蓄積を行っての画像電荷を形成させる撮像素子駆動手段とを備えた
ことを特徴とする認識装置。
【請求項2】
前記撮像素子駆動手段は、
前記固体撮像素子の電荷蓄積時間中に、前記光電変換部で生成された電荷を、前記推定された像ぶれ量に応じた回数に分けて前記転送部に読み出し、読み出された電荷を前記転送部内で転送する処理を繰り返させることにより、前記像ぶれを打ち消すことを特徴とする
請求項1に記載の認識装置。
【請求項3】
前記撮像素子駆動手段は、
前記固体撮像素子の電荷蓄積時間中に、前記光電変換部で生成された電荷を複数回に分けて前記転送部に読み出し、読み出された電荷を前記転送部内で前記推定された像ぶれ量に対応した画素数分転送する処理を繰り返させることにより、前記像ぶれを打ち消すことを特徴とする
請求項1または請求項2に記載の認識装置。
【請求項4】
前記演算制御手段は、
前記被検査体検出手段により前記被検査体の前記第1の位置での検出及び前記第2の位置での検出の結果をもとに、前記撮像位置における前記被検査体の推定移動速度を求め、
該推定移動速度に基づき前記像ぶれ量の推定及び前記像ぶれ補正を行うタイミングの決定を行う
ことを特徴とする請求項1に記載の認識装置。
【請求項5】
前記演算制御手段は、
前記第1の位置及び第2の位置の間の距離を、前記第1の位置の検出信号及び第2の位置の検出信号の発生の時間差で割ることにより得られた速度を前記移動速度と推定する
ことを特徴とする請求項4に記載の認識装置。
【請求項6】
前記固体撮像素子上に配された前記撮影レンズは、その光軸が、前記第1の位置を始点として、前記第2の位置を終点とするベクトルの延長線上の点を通過するように配置され、
前記演算制御手段は、前記被検査体が前記第1の位置及び前記第2の位置の順に通過した後、前記撮像位置を通過する際に前記像ぶれ補正を行うタイミングを決定する
ことを特徴とする請求項1に記載の認識装置。
【請求項7】
前記被検査体が前記第1の位置を始点として、前記第2の位置を終点とするベクトルと平行な方向にしか移動しないように制限する制限手段をさらに備えたことを特徴とする請求項1に記載の認識装置。
【請求項8】
前記固体撮像素子の撮像面に形成された、前記被検査体の光学像の移動方向が、前記転送部における電荷の転送方向と平行となるように、前記固体撮像素子が配置されていることを特徴とする請求項1乃至7のいずか1項に記載の認識装置。
【請求項9】
前記被検査体検出手段は、前記被検査体の前記第1の位置の通過を検出する第1のセンサと、前記被検査体の前記第2の位置の通過を検出する第2のセンサとを備え、
前記第1のセンサ及び第2のセンサの各々は、互いに向き合うように配置された赤外線発光ダイオードと該赤外線発光ダイオードが発する光の波長域に感度を有するフォトトランジスタを備えたものである
ことを特徴とする請求項1に記載の認識装置。
【請求項10】
前記被検査体検出手段は、前記被検査体の前記第1の位置の通過を検出する第1のセンサと、前記被検査体の前記第2の位置の通過を検出する第2のセンサとを備え、
前記第1のセンサ及び第2のセンサは、共通の赤外線発光ダイオードを備え、
前記第1のセンサは、前記赤外線発光ダイオードが発する光の波長域に感度を有し、前記赤外線発光ダイオードが発する光を受けるように配置された第1のフォトトランジスタをさらに備え、
前記第2のセンサは、前記赤外線発光ダイオードが発する光の波長域に感度を有し、前記赤外線発光ダイオードが発する光を受けるように配置された第2のフォトトランジスタをさらに備えたものであり、
前記共通の赤外線発光ダイオードは前記第1のフォトトランジスタと第2のフォトトランジスタを結ぶ線に直交する線上にあり、かつ前記第1のフォトトランジスタまでの距離と前記第2のフォトトランジスタまでの距離が等しい位置に配置されている
ことを特徴とする請求項1に記載の認識装置。
【請求項11】
前記被検査体検出手段は、前記被検査体の前記第1の位置の通過を検出する第1のセンサと、前記被検査体の前記第2の位置の通過を検出する第2のセンサとを備え、
前記第1のセンサ及び第2のセンサの各々は、
互いに同じ方向を向くように設けられた赤外線発光ダイオードと、該赤外線発光ダイオードが発する光の波長域に感度を有するフォトトランジスタとを備え、
前記赤外線発光ダイオードが発する光が被検査体で反射したときにこれを受光するように前記フォトトランジスタが配置されている
ことを特徴とする請求項1に記載の認識装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】

【図10】

【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図17】
【図18】

【図19】

【図20】

【図21】

【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2008−47008(P2008−47008A)
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願番号】特願2006−223828(P2006−223828)
【出願日】平成18年8月21日(2006.8.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願日】平成18年8月21日(2006.8.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]