
誘導制御装置及び飛しょう体
【課題】誘導飛しょう体に搭載されるレドームの屈折等の影響による目標測角信号の補正を、多くの校正試験用のコストや期間をかけずに行い、高い誘導性能を備えた誘導制御装置を得る。
【解決手段】特定の範囲の測角方向のみに限定して校正を実施し、測角方向が範囲外となった場合には、範囲内となるように誘導飛しょう体の姿勢角を変化させ、その際の姿勢角変化量と測角方向の変化と校正済みの測角方向バイアス値に基づき、動的に任意の測角方向バイアス値を決定するようにした。
【解決手段】特定の範囲の測角方向のみに限定して校正を実施し、測角方向が範囲外となった場合には、範囲内となるように誘導飛しょう体の姿勢角を変化させ、その際の姿勢角変化量と測角方向の変化と校正済みの測角方向バイアス値に基づき、動的に任意の測角方向バイアス値を決定するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は飛しょう体に搭載され、電波シーカ等による目標に対する測角情報を用いて飛しょう体を目標へ誘導する誘導制御装置に関するものである。
【背景技術】
【0002】
誘導制御装置は飛しょう体に搭載され、追尾測角手段が出力する目標に対する測角情報(目標測角信号)を用いて目標と会合するために必要な操舵信号を計算し、操舵手段を制御して機体の姿勢及び経路を変化させ、目標と会合させる。
飛しょう体に搭載される追尾測角手段は、目標が発する電波または目標で反射する電波を捕捉・追尾し、目標測角信号を出力する。追尾測角手段により検知される目標測角信号には、受信機熱雑音等の要因による測角ノイズ以外にもレドームによる屈折や電気的なバイアス要因等によるバイアス的な測角誤差(測角方向の誤差)が含まれ、誘導性能の劣化要因となっている。
この劣化を防止するため、例えば測角方向や周波数を引数とした補正テーブルにより目標測角信号に含まれる測角誤差を補正して、目標に対する角度を算出することが行われている(非特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【非特許文献1】DONALD PETERSON、JAMES OTTO、KENEA DOUGLAS 著 「RADOMEBORESIGHT ERROR AND COMPENSATION TECHNIQUES FOR ELECTRONICALLY SCANNED ARRAYS」 AIAA AND SDIO、ANNUAL INTERCEPTOR TECHNOLOGY CONFERENCE 出版,1993年
【発明の概要】
【発明が解決しようとする課題】
【0004】
追尾測角手段が目標に対する方位を測定した目標測角信号においては、目標からの電波がレドームを通過する際のレドームの屈折の影響などにより、バイアス的な測角誤差を発生する。この測角誤差は、測角方向や電波の周波数をパラメータとする校正試験を予め実施しておくことで補正することが可能である。
しかしながら、全ての測角方向や周波数の範囲で精度の高い補正テーブルを取得するためには多くの校正試験を実施する必要があり、多くの費用および時間を要するという課題があった。補正の精度が十分でない場合には、誤った方向に誘導する操舵信号を発生し、誘導性能が劣化するという課題があった。
【0005】
この発明は係る課題を解決するためになされたもので、目標測角信号を補正するために多くの校正試験用のコストや期間をかけず、高い誘導性能を備えた誘導制御装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
本発明の誘導制御装置は、飛しょう体に搭載され、目標からの電波に基づき測定された前記目標に対する測角値を、予め所定の角度範囲内において目標に対する測角値と当該測角値における補正データとが関連付けされて記憶されているデータベース内の補正データを用いて補正し、前記補正後の測角値に基づいて前記飛しょう体を前記目標に向けて誘導する誘導制御装置であって、目標からの電波に基づき測定された前記目標に対する測角値が前記所定の角度範囲外である場合に、前記目標に対する測角値が前記所定の角度範囲内となるように前記飛しょう体の姿勢角を制御し、前記姿勢角の制御前後における前記姿勢角の変化量と、前記姿勢角の制御後で前記所定の角度範囲内にある前記測角値に関連付けされた補正データとを用いて、前記所定の角度範囲外である前記測角値における補正データを算出し、当該算出した補正データと前記所定の角度範囲外である前記測角値とを関連付けして前記データベースに記憶させるようにした。
【発明の効果】
【0007】
本発明の誘導制御装置によれば、データベースに格納され所定の範囲内において予め作成しておいた補正データを用いて、データベースに格納されていない所望の測角方向についても補正データを取得することができるので、予め用意しておくべき補正データの量を小さくすることができ、校正試験を行う時間の短縮化、試験に要する労力の軽減、コストの低減が可能となる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1による誘導制御装置を搭載した飛しょう体の構成を示す構成図である。
【図2】実施の形態1による誘導制御装置において、目標に対する測角方向がデータベースに格納された角度範囲外となった状態を表す図である。
【図3】実施の形態1による誘導制御装置において、ロール系の動作を説明する図である。
【図4】従来の誘導制御装置の構成を示す構成図である。
【発明を実施するための形態】
【0009】
以下において、まず従来の誘導制御装置の動作について説明した後、この発明に係る誘導制御装置について説明する。
【0010】
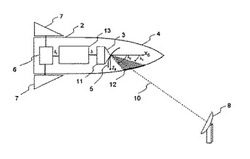
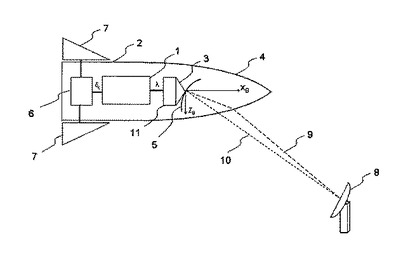
図4は従来の誘導制御装置1を搭載した飛しょう体2の構成を示す図であり、飛しょう体2を側面方向から見たものである。
飛しょう体2は、目標8からの電波を受信するアンテナ面5と、アンテナ面5を所定の方向に駆動するアンテナ駆動手段3と、目標方向の角度を計測し追尾する追尾測角手段11と、追尾測角手段11からの出力を用いて誘導制御を行う誘導制御装置1と、空力舵7と、空力舵
図4において、座標系は、飛しょう体2の機体軸の前方向をXB軸、機体軸と垂直を成す下方向をZB軸、右手系をなすようにYB軸を定義し、それぞれの軸周りの回転角をロール姿勢角φ、ヨー姿勢角ψ、ピッチ姿勢角θと定義する。
【0011】
次に、図4を用いて従来の誘導制御装置1の動作について説明する。
追尾測角手段11は目標8から照射された電波10または目標8で反射された電波10を検知し、検知したその電波10の方向を追尾する。この際、アンテナ面5の中心方向が電波到来方向となるようにアンテナ軸駆動手段3を制御する。
追尾測角手段11は、検知した目標の角度方向に対して、慣性系における目標への測角値を表わす目標測角信号λを出力する。目標測角信号λには目標に対する測角の結果である側角値を含む。
【0012】
誘導制御装置1は、追尾測角手段11が出力する目標測角信号λからその時間変化率dλを算出し、時間変化率dλを用いて飛しょう体2を目標8と会合させるために必要な操舵指令δcを出力する。
操舵手段6は操舵指令δcにより操舵翼7を駆動し、飛しょう体2の姿勢を変化させることにより速度の方向を変化させ、目標8と会合させる。
ここで誘導制御装置1は、飛しょう体2を目標8へ誘導する誘導計算において、慣性系における目標測角信号λおよびその時間変化率dλを使用する。目標測角信号λは追尾測角手段11において電気的に検出され、通常、カルマンフィルタなどの推定計算によりノイズに関する平滑処理後の目標測角信号λおよびその時間変化率dλが求められて、使用される。
【0013】
なお、追尾測角手段11では、前記の誘導に必要な信号を検出するために目標測角信号λの変化に含まれる飛しょう体の姿勢変化率成分dθを分離する必要がある。このためアンテナ軸駆動手段3には慣性ジャイロが搭載されており、これによりアンテナ面5の動揺レートを検出し、検出されたアンテナ面の動揺成分に相当する角度だけ逆方向にアンテナ軸を駆動することで機体が動揺することによる目標測角信号の誤差拡大を補償できる。
【0014】
追尾測角手段11が出力する目標測角信号λは、目標からの入射電波がレドーム4の屈折を受ける経路9をとる場合、また、受信系回路等に起因するバイアス的変動が存在する場合にバイアス誤差を発生する可能性がある。
このバイアス誤差は使用される部品の特性や測角方向や電波の周波数に依存している数値である。よって個々の装置について予めこれらの部品の特性や測角方向や電波の周波数などをパラメータとした校正試験を実施し、校正試験により作成された補正テーブル、すなわち目標測角信号λ(目標に対する測角値)とバイアス誤差を補正する補正データとが関連付けされた補正テーブルを飛しょう体2に設置されたデータベース(図示せず)に格納しておく。そして、目標に対する角度を求める際には、目標測角信号λ(目標に対する測角値)を、補正テーブルから抽出した目標測角信号λに関連付けされたテーブル値を用いて補正するようにする。このようにすることで、目標に対する精度の高い角度情報を得ることができる。
【0015】
バイアス誤差分の補正に関し、予め全ての測角方向、周波数について校正試験を実施しておくことが精度向上の観点から望ましい。しかしながら現実的には費用・期間の観点から困難である。
このため、従来、一定の角度刻みで校正試験を実施し間の値を補間処理で求めることでバイアス誤差の補正を行うことが行われている
【0016】
このように、従来、補正精度を高めるためには校正試験における角度刻みを細かくすることが必要であるが、この場合校正試験に多大な時間を要することとなり、特に使用される周波数範囲が広い場合などは多くの試験時間を要することで費用・期間が増加してしまう問題があった。
【0017】
実施の形態1.
次に、本発明の実施の形態1に係る誘導制御装置13を、図1〜図3を用いて説明する。
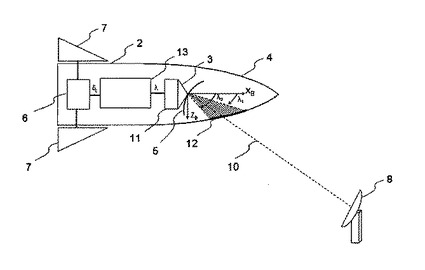
図1は本発明の誘導制御装置13を搭載する飛しょう体2の構成を示す図であり、従来(図4)と同等の構成には同一番号を付している。
従来と異なる点として、目標に対する測角方向を補正する補正テーブルとして、従来は広い範囲で、例えば測定し得る全ての測角方向や周波数の範囲で校正試験を実施し、その結果をデータベースに格納していた。本実施の形態では所定の範囲、例えば目標測角信号λ(目標に対する測角値)がλ1<λ<λ2(λ1、λ2は予め定めた設定値)となる範囲12に限定して校正試験を実施し、その校正試験により作成された補正テーブル、すなわち目標測角信号λ(目標に対する測角値)とバイアス誤差を補正する補正データとが関連付けされた補正テーブルを飛しょう体2のデータベース(図示せず)に格納するようにした。
このように実施の形態1では、データベースに格納される補正テーブルの補正データ量は、校正試験を実施する試験数に比例して著しく小さくなる。例えば、校正が行われる測角方向の範囲が従来方式に比べて著しく狭く限定されており、これに伴い補正データ量も小さくなるという特徴がある。
【0018】
ここで、実施の形態1に係る誘導制御装置13の動作について説明する。なお、ここでは補正テーブルとして、目標測角信号λ(目標に対する測角値)がλ1<λ<λ2となる範囲12について補正データを有するとする。
(1)追尾測角手段11が出力する目標測角信号λがλ1<λ<λ2の範囲12にある場合:
この場合、従来と同様の補正が可能である。すなわち誘導制御装置13は、目標測角信号λを引数としてデータベースに格納された補正データを抽出し、抽出した補正データを用いて目標測角信号λを補正することで、補正後の目標に対する測角値を求める。
(2)追尾測角手段11が出力する目標測角信号λがλ1<λ<λ2の範囲12にない場合:
この場合、データベースには対応する補正データが格納されていないため、従来方式と同じ方法により補正を行うことはできない。
実施の形態1に係る誘導制御装置13は、追尾測角手段11が出力する目標測角信号λとデータベースに格納した校正用の補正パラメータとの比較により、目標測角信号λが校正範囲にないことを検知すると、目標に対する測角方向が校正範囲内(すなわちλ1<λ<λ2)の予め定めた測角方向λmと一致するように、飛しょう体2のピッチ姿勢角θを変化させることを行う。
まず、誘導制御装置13はΔλ=λ―λmだけ姿勢角を変化させる姿勢角指令θcを計算する。
次に誘導制御装置13は、姿勢角θを姿勢角θcとするために必要な操舵指令δcを計算する。計算においては、例えば一般的なPI補償器に基づく姿勢角制御系を構成することで実現することができる。
【0019】
ここで、飛しょう体2のピッチ系姿勢角を変化させた後の測角方向をλm(λ1<λm<λ2)とする。
飛しょう体2の姿勢変化の前後におけるピッチ姿勢角変化量Δλ(Δλ=λ―λm)は、飛しょう体2の姿勢変化の前後における測角方向と測角バイアス誤差との和の変化量に一致する。
よって、校正範囲外にある測角方向λにおける測角バイアス誤差の見積値を測角バイアス誤差見積値Δλm1とすると、測角バイアス誤差見積値Δλm1はデータベースに格納されている測角方向λmにおける測角バイアス誤差見積値Δλmを用いて、次式(1)により計算することができる。式(1)により計算した結果を、パラメータ(側角方向=λm)に関連付けして補正テーブルに追加することで、補正テーブルにないパラメータにおける補正データについて追加することができる。
なお、測角方向λm及び測角方向λにはランダムなノイズが含まれるが、適当なローパスフィルタ処理により容易に取り除くことができる。
【0020】
【数1】

【0021】
以上、ピッチ系において、校正範囲外にある測角方向λにおける測角バイアス誤差の見積値の算出について説明を行ったが、ヨー系についても同様の処理を行うことができる。
【0022】
このように実施の形態1に係る誘導制御装置1は、ピッチ系やヨー系で校正試験を実施していない測角方向の範囲についても、誘導中の飛しょう体のピッチ系やヨー系の姿勢を変化させることでバイアス誤差の補正データを取得することができる。
誘導制御装置1はこのように飛しょう中に機体を動揺させて取得した補正データを順次補正テーブルに追加していくことで、初期の補正テーブルにはない目標との会合に必要な補正情報を増やすことができ、結果として精度よく飛しょう体2を目標へ誘導することができる。
なお、目標に対する測角値の補正においては、補正テーブル内で補間処理で求めた補正データを用いるようにしてもよい。
【0023】
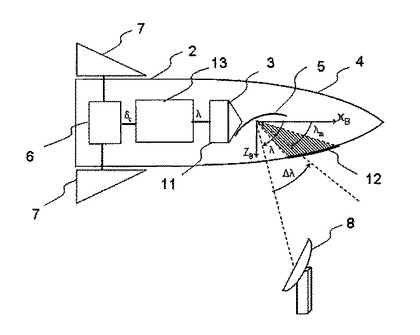
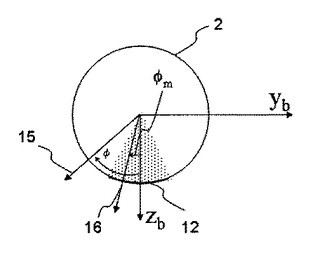
以上はピッチ系やヨー系に関するものであるが、次に、ロール方向の測角バイアス誤差見積値の算出について、図3を用いて説明する。
従来の方式ではロール方向についても測角方向が変化した場合、測角バイアス誤差の値が変化するため全てのロール姿勢角について校正試験が必要であった。このため校正試験に多大な時間を要し、費用・期間が増加してしまう問題があった。
実施の形態1に係る誘導制御装置1では、校正試験を実施する領域12をロール方向にも限定した範囲とすることにより、校正が行われている測角方向の範囲が従来方式に比べて著しく限定することができる。
【0024】
ここで、ロール方向に関し、校正範囲外にある測角方向φにおける測角バイアス誤差見積値を算出する方法について説明する。ここでは補正テーブルとして、目標測角信号φ(目標に対する測角値)がφ1<φ<φ2となる範囲12(図3参照)について補正データを有するとする。
(1)追尾測角手段11が出力する目標測角信号φがφ1<φ<φ2の範囲12にある場合:
この場合、従来と同様の補正が可能である。すなわち誘導制御装置13は、目標測角信号λを引数としてデータベースに格納された補正データを抽出し、抽出した補正データを用いて目標測角信号φを補正することで、補正後の目標に対する測角値を求める。
(2)追尾測角手段11が出力する目標測角信号φがφ1<φ<φ2の範囲12にない場合:
この場合、データベースには補正データが格納されていないため、従来方式と同じ方法により補正を行うことはできない。
そこで実施の形態1に係る誘導制御装置13では、測角方向φと予め用意した校正用の補正テーブル値との比較により測角方向φが校正範囲外であることを検知すると、構成範囲内のあらかじめ決められた測角方向φmまでロール姿勢角φを変化させるために、Δφ=φ―φmだけロール姿勢角を変化させるロール姿勢角指令φcを計算する。次に、ロール姿勢角φを姿勢角φcとするために必要な操舵指令δcを計算する。この際、操舵指令δcの計算は、前述のピッチ・ヨー系の場合と同様なPI補償器により姿勢角制御系を構成することで実現することができる。
【0025】
ここで、ロール姿勢角変化の前後でピッチ姿勢角が変化しないものとすると、飛しょう体2の姿勢変化の前後での測角方向の変化は測角バイアス誤差の変化量に一致する。これより、ロール姿勢角φkにおける測角バイアス誤差見積値Δλkを用いてロール角φにおける測角バイアス誤差見積値Δλk1を式(2)により計算することができる。
【0026】
【数2】
【0027】
以上の処理を行うことで、ピッチ/ヨー系、ロール系のそれぞれについて、飛しょう中の機体を動揺させ、予め所定の測角方向範囲のみで校正を実施した補正テーブルの補正データを用いることで、任意の測角方向における測角誤差を補正する補正データを生成することが可能である。誘導制御装置1は新たに生成された補正データを用いることで飛しょう体を精度よく目標へ誘導することができる。
【0028】
目標電波特性が同一である限り、同一の測角方向については同一の補正値を使用することができ、特定の目標に関して想定される測角方向の範囲について誘導開始時に上記の方法に基づき、補正値を取得することで効率的に誘導を行うことができる。
【0029】
なお、この実施の形態では、補正テーブルのパラメータを測角方向や電波の周波数としたがこれに限られるものではなく、その他部品の特性パラメータ等が含まれていてもよい。
また、この実施の形態では補正テーブルを格納するデータベースは飛しょう体に設けられているが、これ以外にも例えば通信可能な地上局に設置され、パラメータを地上局に送信し地上局から補正データを取得するようにしてもよい。
【0030】
実施の形態2.
次に、実施の形態2に基づく誘導制御装置13について説明する。
実施の形態1においては、飛しょう体の姿勢変化を利用して動的に測角方向の校正を行ったが、姿勢変化を行う際に飛しょう体と目標の相対運動により測角方向が変化する効果については考慮されていなかった。このため、特に目標との相対運動速度が速く幾何学的な関係が速やかに変化する場合には、測角バイアス誤差の見積誤差を発生する場合があった。
実施の形態2に係る誘導制御装置13においては、追尾測角手段11の出力である測角方向λおよびその時間変化率dλを用いることで、前述の測角方向が変化する効果を補正するようにした。
【0031】
実施の形態2に係る誘導制御装置13においては、追尾測角手段11の出力である測角方向λおよびその時間変化率dλを用い、式(3)に基づき、測角方向が変化する際の測角方向λ'を算出する。
【0032】
【数3】
【0033】
姿勢角変化に要する時間に関するこの補正を行った後の測角方向λ'を用いて前記の方法により測角方向の誤差推定を行うことで、目標に対する測角の誤差を補正し、誘導精度を改善することができる。
【符号の説明】
【0034】
1 従来の誘導制御装置、2 飛しょう体、3 アンテナ駆動手段、4 レドーム、5 アンテナ面、6 操舵装置、7 空力舵、8 目標、9 レドームにより屈折した場合の伝播経路、10 誤差・屈折がない場合の伝播経路、11 追尾測角手段、12 校正済みの測角方向範囲、13 本発明による誘導制御装置、15 目標方向、16 ロール姿勢変化後の目標方向、λ 目標測角信号、λ' 時間変化率を用いて表わす目標測角信号。
【技術分野】
【0001】
この発明は飛しょう体に搭載され、電波シーカ等による目標に対する測角情報を用いて飛しょう体を目標へ誘導する誘導制御装置に関するものである。
【背景技術】
【0002】
誘導制御装置は飛しょう体に搭載され、追尾測角手段が出力する目標に対する測角情報(目標測角信号)を用いて目標と会合するために必要な操舵信号を計算し、操舵手段を制御して機体の姿勢及び経路を変化させ、目標と会合させる。
飛しょう体に搭載される追尾測角手段は、目標が発する電波または目標で反射する電波を捕捉・追尾し、目標測角信号を出力する。追尾測角手段により検知される目標測角信号には、受信機熱雑音等の要因による測角ノイズ以外にもレドームによる屈折や電気的なバイアス要因等によるバイアス的な測角誤差(測角方向の誤差)が含まれ、誘導性能の劣化要因となっている。
この劣化を防止するため、例えば測角方向や周波数を引数とした補正テーブルにより目標測角信号に含まれる測角誤差を補正して、目標に対する角度を算出することが行われている(非特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【非特許文献1】DONALD PETERSON、JAMES OTTO、KENEA DOUGLAS 著 「RADOMEBORESIGHT ERROR AND COMPENSATION TECHNIQUES FOR ELECTRONICALLY SCANNED ARRAYS」 AIAA AND SDIO、ANNUAL INTERCEPTOR TECHNOLOGY CONFERENCE 出版,1993年
【発明の概要】
【発明が解決しようとする課題】
【0004】
追尾測角手段が目標に対する方位を測定した目標測角信号においては、目標からの電波がレドームを通過する際のレドームの屈折の影響などにより、バイアス的な測角誤差を発生する。この測角誤差は、測角方向や電波の周波数をパラメータとする校正試験を予め実施しておくことで補正することが可能である。
しかしながら、全ての測角方向や周波数の範囲で精度の高い補正テーブルを取得するためには多くの校正試験を実施する必要があり、多くの費用および時間を要するという課題があった。補正の精度が十分でない場合には、誤った方向に誘導する操舵信号を発生し、誘導性能が劣化するという課題があった。
【0005】
この発明は係る課題を解決するためになされたもので、目標測角信号を補正するために多くの校正試験用のコストや期間をかけず、高い誘導性能を備えた誘導制御装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
本発明の誘導制御装置は、飛しょう体に搭載され、目標からの電波に基づき測定された前記目標に対する測角値を、予め所定の角度範囲内において目標に対する測角値と当該測角値における補正データとが関連付けされて記憶されているデータベース内の補正データを用いて補正し、前記補正後の測角値に基づいて前記飛しょう体を前記目標に向けて誘導する誘導制御装置であって、目標からの電波に基づき測定された前記目標に対する測角値が前記所定の角度範囲外である場合に、前記目標に対する測角値が前記所定の角度範囲内となるように前記飛しょう体の姿勢角を制御し、前記姿勢角の制御前後における前記姿勢角の変化量と、前記姿勢角の制御後で前記所定の角度範囲内にある前記測角値に関連付けされた補正データとを用いて、前記所定の角度範囲外である前記測角値における補正データを算出し、当該算出した補正データと前記所定の角度範囲外である前記測角値とを関連付けして前記データベースに記憶させるようにした。
【発明の効果】
【0007】
本発明の誘導制御装置によれば、データベースに格納され所定の範囲内において予め作成しておいた補正データを用いて、データベースに格納されていない所望の測角方向についても補正データを取得することができるので、予め用意しておくべき補正データの量を小さくすることができ、校正試験を行う時間の短縮化、試験に要する労力の軽減、コストの低減が可能となる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1による誘導制御装置を搭載した飛しょう体の構成を示す構成図である。
【図2】実施の形態1による誘導制御装置において、目標に対する測角方向がデータベースに格納された角度範囲外となった状態を表す図である。
【図3】実施の形態1による誘導制御装置において、ロール系の動作を説明する図である。
【図4】従来の誘導制御装置の構成を示す構成図である。
【発明を実施するための形態】
【0009】
以下において、まず従来の誘導制御装置の動作について説明した後、この発明に係る誘導制御装置について説明する。
【0010】
図4は従来の誘導制御装置1を搭載した飛しょう体2の構成を示す図であり、飛しょう体2を側面方向から見たものである。
飛しょう体2は、目標8からの電波を受信するアンテナ面5と、アンテナ面5を所定の方向に駆動するアンテナ駆動手段3と、目標方向の角度を計測し追尾する追尾測角手段11と、追尾測角手段11からの出力を用いて誘導制御を行う誘導制御装置1と、空力舵7と、空力舵
図4において、座標系は、飛しょう体2の機体軸の前方向をXB軸、機体軸と垂直を成す下方向をZB軸、右手系をなすようにYB軸を定義し、それぞれの軸周りの回転角をロール姿勢角φ、ヨー姿勢角ψ、ピッチ姿勢角θと定義する。
【0011】
次に、図4を用いて従来の誘導制御装置1の動作について説明する。
追尾測角手段11は目標8から照射された電波10または目標8で反射された電波10を検知し、検知したその電波10の方向を追尾する。この際、アンテナ面5の中心方向が電波到来方向となるようにアンテナ軸駆動手段3を制御する。
追尾測角手段11は、検知した目標の角度方向に対して、慣性系における目標への測角値を表わす目標測角信号λを出力する。目標測角信号λには目標に対する測角の結果である側角値を含む。
【0012】
誘導制御装置1は、追尾測角手段11が出力する目標測角信号λからその時間変化率dλを算出し、時間変化率dλを用いて飛しょう体2を目標8と会合させるために必要な操舵指令δcを出力する。
操舵手段6は操舵指令δcにより操舵翼7を駆動し、飛しょう体2の姿勢を変化させることにより速度の方向を変化させ、目標8と会合させる。
ここで誘導制御装置1は、飛しょう体2を目標8へ誘導する誘導計算において、慣性系における目標測角信号λおよびその時間変化率dλを使用する。目標測角信号λは追尾測角手段11において電気的に検出され、通常、カルマンフィルタなどの推定計算によりノイズに関する平滑処理後の目標測角信号λおよびその時間変化率dλが求められて、使用される。
【0013】
なお、追尾測角手段11では、前記の誘導に必要な信号を検出するために目標測角信号λの変化に含まれる飛しょう体の姿勢変化率成分dθを分離する必要がある。このためアンテナ軸駆動手段3には慣性ジャイロが搭載されており、これによりアンテナ面5の動揺レートを検出し、検出されたアンテナ面の動揺成分に相当する角度だけ逆方向にアンテナ軸を駆動することで機体が動揺することによる目標測角信号の誤差拡大を補償できる。
【0014】
追尾測角手段11が出力する目標測角信号λは、目標からの入射電波がレドーム4の屈折を受ける経路9をとる場合、また、受信系回路等に起因するバイアス的変動が存在する場合にバイアス誤差を発生する可能性がある。
このバイアス誤差は使用される部品の特性や測角方向や電波の周波数に依存している数値である。よって個々の装置について予めこれらの部品の特性や測角方向や電波の周波数などをパラメータとした校正試験を実施し、校正試験により作成された補正テーブル、すなわち目標測角信号λ(目標に対する測角値)とバイアス誤差を補正する補正データとが関連付けされた補正テーブルを飛しょう体2に設置されたデータベース(図示せず)に格納しておく。そして、目標に対する角度を求める際には、目標測角信号λ(目標に対する測角値)を、補正テーブルから抽出した目標測角信号λに関連付けされたテーブル値を用いて補正するようにする。このようにすることで、目標に対する精度の高い角度情報を得ることができる。
【0015】
バイアス誤差分の補正に関し、予め全ての測角方向、周波数について校正試験を実施しておくことが精度向上の観点から望ましい。しかしながら現実的には費用・期間の観点から困難である。
このため、従来、一定の角度刻みで校正試験を実施し間の値を補間処理で求めることでバイアス誤差の補正を行うことが行われている
【0016】
このように、従来、補正精度を高めるためには校正試験における角度刻みを細かくすることが必要であるが、この場合校正試験に多大な時間を要することとなり、特に使用される周波数範囲が広い場合などは多くの試験時間を要することで費用・期間が増加してしまう問題があった。
【0017】
実施の形態1.
次に、本発明の実施の形態1に係る誘導制御装置13を、図1〜図3を用いて説明する。
図1は本発明の誘導制御装置13を搭載する飛しょう体2の構成を示す図であり、従来(図4)と同等の構成には同一番号を付している。
従来と異なる点として、目標に対する測角方向を補正する補正テーブルとして、従来は広い範囲で、例えば測定し得る全ての測角方向や周波数の範囲で校正試験を実施し、その結果をデータベースに格納していた。本実施の形態では所定の範囲、例えば目標測角信号λ(目標に対する測角値)がλ1<λ<λ2(λ1、λ2は予め定めた設定値)となる範囲12に限定して校正試験を実施し、その校正試験により作成された補正テーブル、すなわち目標測角信号λ(目標に対する測角値)とバイアス誤差を補正する補正データとが関連付けされた補正テーブルを飛しょう体2のデータベース(図示せず)に格納するようにした。
このように実施の形態1では、データベースに格納される補正テーブルの補正データ量は、校正試験を実施する試験数に比例して著しく小さくなる。例えば、校正が行われる測角方向の範囲が従来方式に比べて著しく狭く限定されており、これに伴い補正データ量も小さくなるという特徴がある。
【0018】
ここで、実施の形態1に係る誘導制御装置13の動作について説明する。なお、ここでは補正テーブルとして、目標測角信号λ(目標に対する測角値)がλ1<λ<λ2となる範囲12について補正データを有するとする。
(1)追尾測角手段11が出力する目標測角信号λがλ1<λ<λ2の範囲12にある場合:
この場合、従来と同様の補正が可能である。すなわち誘導制御装置13は、目標測角信号λを引数としてデータベースに格納された補正データを抽出し、抽出した補正データを用いて目標測角信号λを補正することで、補正後の目標に対する測角値を求める。
(2)追尾測角手段11が出力する目標測角信号λがλ1<λ<λ2の範囲12にない場合:
この場合、データベースには対応する補正データが格納されていないため、従来方式と同じ方法により補正を行うことはできない。
実施の形態1に係る誘導制御装置13は、追尾測角手段11が出力する目標測角信号λとデータベースに格納した校正用の補正パラメータとの比較により、目標測角信号λが校正範囲にないことを検知すると、目標に対する測角方向が校正範囲内(すなわちλ1<λ<λ2)の予め定めた測角方向λmと一致するように、飛しょう体2のピッチ姿勢角θを変化させることを行う。
まず、誘導制御装置13はΔλ=λ―λmだけ姿勢角を変化させる姿勢角指令θcを計算する。
次に誘導制御装置13は、姿勢角θを姿勢角θcとするために必要な操舵指令δcを計算する。計算においては、例えば一般的なPI補償器に基づく姿勢角制御系を構成することで実現することができる。
【0019】
ここで、飛しょう体2のピッチ系姿勢角を変化させた後の測角方向をλm(λ1<λm<λ2)とする。
飛しょう体2の姿勢変化の前後におけるピッチ姿勢角変化量Δλ(Δλ=λ―λm)は、飛しょう体2の姿勢変化の前後における測角方向と測角バイアス誤差との和の変化量に一致する。
よって、校正範囲外にある測角方向λにおける測角バイアス誤差の見積値を測角バイアス誤差見積値Δλm1とすると、測角バイアス誤差見積値Δλm1はデータベースに格納されている測角方向λmにおける測角バイアス誤差見積値Δλmを用いて、次式(1)により計算することができる。式(1)により計算した結果を、パラメータ(側角方向=λm)に関連付けして補正テーブルに追加することで、補正テーブルにないパラメータにおける補正データについて追加することができる。
なお、測角方向λm及び測角方向λにはランダムなノイズが含まれるが、適当なローパスフィルタ処理により容易に取り除くことができる。
【0020】
【数1】
【0021】
以上、ピッチ系において、校正範囲外にある測角方向λにおける測角バイアス誤差の見積値の算出について説明を行ったが、ヨー系についても同様の処理を行うことができる。
【0022】
このように実施の形態1に係る誘導制御装置1は、ピッチ系やヨー系で校正試験を実施していない測角方向の範囲についても、誘導中の飛しょう体のピッチ系やヨー系の姿勢を変化させることでバイアス誤差の補正データを取得することができる。
誘導制御装置1はこのように飛しょう中に機体を動揺させて取得した補正データを順次補正テーブルに追加していくことで、初期の補正テーブルにはない目標との会合に必要な補正情報を増やすことができ、結果として精度よく飛しょう体2を目標へ誘導することができる。
なお、目標に対する測角値の補正においては、補正テーブル内で補間処理で求めた補正データを用いるようにしてもよい。
【0023】
以上はピッチ系やヨー系に関するものであるが、次に、ロール方向の測角バイアス誤差見積値の算出について、図3を用いて説明する。
従来の方式ではロール方向についても測角方向が変化した場合、測角バイアス誤差の値が変化するため全てのロール姿勢角について校正試験が必要であった。このため校正試験に多大な時間を要し、費用・期間が増加してしまう問題があった。
実施の形態1に係る誘導制御装置1では、校正試験を実施する領域12をロール方向にも限定した範囲とすることにより、校正が行われている測角方向の範囲が従来方式に比べて著しく限定することができる。
【0024】
ここで、ロール方向に関し、校正範囲外にある測角方向φにおける測角バイアス誤差見積値を算出する方法について説明する。ここでは補正テーブルとして、目標測角信号φ(目標に対する測角値)がφ1<φ<φ2となる範囲12(図3参照)について補正データを有するとする。
(1)追尾測角手段11が出力する目標測角信号φがφ1<φ<φ2の範囲12にある場合:
この場合、従来と同様の補正が可能である。すなわち誘導制御装置13は、目標測角信号λを引数としてデータベースに格納された補正データを抽出し、抽出した補正データを用いて目標測角信号φを補正することで、補正後の目標に対する測角値を求める。
(2)追尾測角手段11が出力する目標測角信号φがφ1<φ<φ2の範囲12にない場合:
この場合、データベースには補正データが格納されていないため、従来方式と同じ方法により補正を行うことはできない。
そこで実施の形態1に係る誘導制御装置13では、測角方向φと予め用意した校正用の補正テーブル値との比較により測角方向φが校正範囲外であることを検知すると、構成範囲内のあらかじめ決められた測角方向φmまでロール姿勢角φを変化させるために、Δφ=φ―φmだけロール姿勢角を変化させるロール姿勢角指令φcを計算する。次に、ロール姿勢角φを姿勢角φcとするために必要な操舵指令δcを計算する。この際、操舵指令δcの計算は、前述のピッチ・ヨー系の場合と同様なPI補償器により姿勢角制御系を構成することで実現することができる。
【0025】
ここで、ロール姿勢角変化の前後でピッチ姿勢角が変化しないものとすると、飛しょう体2の姿勢変化の前後での測角方向の変化は測角バイアス誤差の変化量に一致する。これより、ロール姿勢角φkにおける測角バイアス誤差見積値Δλkを用いてロール角φにおける測角バイアス誤差見積値Δλk1を式(2)により計算することができる。
【0026】
【数2】
【0027】
以上の処理を行うことで、ピッチ/ヨー系、ロール系のそれぞれについて、飛しょう中の機体を動揺させ、予め所定の測角方向範囲のみで校正を実施した補正テーブルの補正データを用いることで、任意の測角方向における測角誤差を補正する補正データを生成することが可能である。誘導制御装置1は新たに生成された補正データを用いることで飛しょう体を精度よく目標へ誘導することができる。
【0028】
目標電波特性が同一である限り、同一の測角方向については同一の補正値を使用することができ、特定の目標に関して想定される測角方向の範囲について誘導開始時に上記の方法に基づき、補正値を取得することで効率的に誘導を行うことができる。
【0029】
なお、この実施の形態では、補正テーブルのパラメータを測角方向や電波の周波数としたがこれに限られるものではなく、その他部品の特性パラメータ等が含まれていてもよい。
また、この実施の形態では補正テーブルを格納するデータベースは飛しょう体に設けられているが、これ以外にも例えば通信可能な地上局に設置され、パラメータを地上局に送信し地上局から補正データを取得するようにしてもよい。
【0030】
実施の形態2.
次に、実施の形態2に基づく誘導制御装置13について説明する。
実施の形態1においては、飛しょう体の姿勢変化を利用して動的に測角方向の校正を行ったが、姿勢変化を行う際に飛しょう体と目標の相対運動により測角方向が変化する効果については考慮されていなかった。このため、特に目標との相対運動速度が速く幾何学的な関係が速やかに変化する場合には、測角バイアス誤差の見積誤差を発生する場合があった。
実施の形態2に係る誘導制御装置13においては、追尾測角手段11の出力である測角方向λおよびその時間変化率dλを用いることで、前述の測角方向が変化する効果を補正するようにした。
【0031】
実施の形態2に係る誘導制御装置13においては、追尾測角手段11の出力である測角方向λおよびその時間変化率dλを用い、式(3)に基づき、測角方向が変化する際の測角方向λ'を算出する。
【0032】
【数3】
【0033】
姿勢角変化に要する時間に関するこの補正を行った後の測角方向λ'を用いて前記の方法により測角方向の誤差推定を行うことで、目標に対する測角の誤差を補正し、誘導精度を改善することができる。
【符号の説明】
【0034】
1 従来の誘導制御装置、2 飛しょう体、3 アンテナ駆動手段、4 レドーム、5 アンテナ面、6 操舵装置、7 空力舵、8 目標、9 レドームにより屈折した場合の伝播経路、10 誤差・屈折がない場合の伝播経路、11 追尾測角手段、12 校正済みの測角方向範囲、13 本発明による誘導制御装置、15 目標方向、16 ロール姿勢変化後の目標方向、λ 目標測角信号、λ' 時間変化率を用いて表わす目標測角信号。
【特許請求の範囲】
【請求項1】
飛しょう体に搭載され、目標からの電波に基づき測定された前記目標に対する測角値を、予め所定の角度範囲内において目標に対する測角値と当該測角値における補正データとが関連付けされて記憶されているデータベース内の補正データを用いて補正し、前記補正後の測角値に基づいて前記飛しょう体を前記目標に向けて誘導する誘導制御装置であって、
目標からの電波に基づき測定された前記目標に対する測角値が前記所定の角度範囲外である場合に、前記目標に対する測角値が前記所定の角度範囲内となるように前記飛しょう体の姿勢角を制御し、前記姿勢角の制御前後における前記姿勢角の変化量と、前記姿勢角の制御後で前記所定の角度範囲内にある前記測角値に関連付けされた補正データとを用いて、前記所定の角度範囲外である前記測角値における補正データを算出し、当該算出した補正データと前記所定の角度範囲外である前記測角値とを関連付けして前記データベースに記憶させることを特徴とする誘導制御装置。
【請求項2】
前記姿勢角の制御前における前記測角値をλ、前記姿勢角の制御後における前記測角値をλm、前記測角値λmに関連付けされた前記補正データをΔλmとしたときに、前記測角値λに関連付けされる補正データΔλm1は、式
により算出されることを特徴とする請求項1記載の誘導制御装置。
【請求項3】
前記姿勢角の制御前の前記測角値をλ、前記姿勢角の制御後の前記測角値をλm、前記測角値λの時間変化率をdλ、前記姿勢角の制御開始からの経過時間をΔt*、Δt*経過後の前記目標に対する測角値をλ'としたときに、前記測角値λ'に関連付けされる補正データΔλm2は、式
により算出されることを特徴とする請求項1または2に記載の誘導制御装置。
【請求項4】
前記目標に対する測角値を、前記データベースに記憶された前記測角値近傍にある測角値に関連付けされた補正データを補間処理して補正することを特徴とする請求項1乃至3のいずれかに記載の誘導制御装置。
【請求項5】
請求項1乃至4のいずれかに記載の誘導制御装置を搭載することを特徴とする飛しょう体。
【請求項1】
飛しょう体に搭載され、目標からの電波に基づき測定された前記目標に対する測角値を、予め所定の角度範囲内において目標に対する測角値と当該測角値における補正データとが関連付けされて記憶されているデータベース内の補正データを用いて補正し、前記補正後の測角値に基づいて前記飛しょう体を前記目標に向けて誘導する誘導制御装置であって、
目標からの電波に基づき測定された前記目標に対する測角値が前記所定の角度範囲外である場合に、前記目標に対する測角値が前記所定の角度範囲内となるように前記飛しょう体の姿勢角を制御し、前記姿勢角の制御前後における前記姿勢角の変化量と、前記姿勢角の制御後で前記所定の角度範囲内にある前記測角値に関連付けされた補正データとを用いて、前記所定の角度範囲外である前記測角値における補正データを算出し、当該算出した補正データと前記所定の角度範囲外である前記測角値とを関連付けして前記データベースに記憶させることを特徴とする誘導制御装置。
【請求項2】
前記姿勢角の制御前における前記測角値をλ、前記姿勢角の制御後における前記測角値をλm、前記測角値λmに関連付けされた前記補正データをΔλmとしたときに、前記測角値λに関連付けされる補正データΔλm1は、式
により算出されることを特徴とする請求項1記載の誘導制御装置。
【請求項3】
前記姿勢角の制御前の前記測角値をλ、前記姿勢角の制御後の前記測角値をλm、前記測角値λの時間変化率をdλ、前記姿勢角の制御開始からの経過時間をΔt*、Δt*経過後の前記目標に対する測角値をλ'としたときに、前記測角値λ'に関連付けされる補正データΔλm2は、式
により算出されることを特徴とする請求項1または2に記載の誘導制御装置。
【請求項4】
前記目標に対する測角値を、前記データベースに記憶された前記測角値近傍にある測角値に関連付けされた補正データを補間処理して補正することを特徴とする請求項1乃至3のいずれかに記載の誘導制御装置。
【請求項5】
請求項1乃至4のいずれかに記載の誘導制御装置を搭載することを特徴とする飛しょう体。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−149571(P2011−149571A)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願番号】特願2010−9028(P2010−9028)
【出願日】平成22年1月19日(2010.1.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願日】平成22年1月19日(2010.1.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]