
誘導加熱調理器
【課題】トッププレート上の鍋の材質,底の状態,トッププレートなど機器構成部材の調理中での温度上昇の影響を受けることなく鍋温度を非接触で高精度かつ安定に応答性良く検出する。
【解決手段】鍋を戴置するトッププレートと、その下にある加熱コイルと、加熱コイルを固定する部材に設け、鍋からの赤外線を導光する導光筒と、その導光筒を通過した赤外線を検出する赤外線検出手段の出力から、トッププレート及び導光筒の温度からそれらが放射する赤外線量を算出し、それを前記赤外線検出手段の出力から減算して鍋温度を検出する鍋温度検出手段を持つ誘導加熱調理器。
【解決手段】鍋を戴置するトッププレートと、その下にある加熱コイルと、加熱コイルを固定する部材に設け、鍋からの赤外線を導光する導光筒と、その導光筒を通過した赤外線を検出する赤外線検出手段の出力から、トッププレート及び導光筒の温度からそれらが放射する赤外線量を算出し、それを前記赤外線検出手段の出力から減算して鍋温度を検出する鍋温度検出手段を持つ誘導加熱調理器。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鍋温度検出手段としてサーモパイルを備えた誘導加熱調理器に関する。
【背景技術】
【0002】
誘導加熱調理器は、結晶化ガラス等で構成されるトッププレート下に同心円状の誘導加熱コイル(以下「加熱コイル」と略称)を設置し、これに高周波電流を流し、発生する磁界でトッププレート上に戴置された調理容器である鍋底にうず電流を誘起し、このジュール熱で調理容器である鍋を直接加熱するものである。
【0003】
誘導加熱調理器の鍋温度検出手段として、現在では応答速度が良好な点で加熱された鍋底から放射される赤外線をトッププレート越しに赤外線センサで観測し温度を検出するものが多く使われている。この赤外線センサは加熱コイル中心空隙付近の下に配置されて、鍋底から放射される赤外線をトッププレート越しに赤外線センサで検出し、その出力に応じて加熱コイルを駆動するインバータ回路出力を制御して調理温度を調整するものである。
【0004】
しかし、調理温度(100から300℃)ではその放射赤外線エネルギーは少なく、さらに、トッププレートの光学特性から、トッププレートを通過する波長は1μmから3μmの幅2μm程度しかなく鍋の放射赤外線エネルギーの1〜2%しかない。このため、使用する赤外線センサの感度は体温計等に用いられるそれの2桁高い感度が求められる。
【0005】
さらに、加熱中ではトッププレート自身も鍋底からの伝熱あるいは放射で加熱され、この放射赤外線エネルギーは鍋の放射赤外線エネルギーと同等の量になる。つまり、鍋とトッププレートとの双方からの放射赤外線エネルギーが赤外線センサに入射することになり、調理中のトッププレート自身の温度上昇が鍋温度を検出する赤外線センサの検出外乱となり検出温度に誤差が生じることになる。この課題を解決する手段として特許文献1,2,3に挙げるものがある。
【0006】
特許文献1の技術は、トッププレートに設けられ、鍋の底面から放射される赤外線をトッププレートの下に透過させる第1の測定エリアと、トッププレートに設けられ、鍋の底面から放射される赤外線を遮断する第2の測定エリアと、トッププレート下方に設けられ、第1の測定エリアからの赤外線量及び第2の測定エリアからの赤外線量を検出するアレイ状の赤外線検出部とを備え、一つのアレイが検出する第1の測定エリアからの赤外線量から他の一つのアレイが検出する第2の測定エリアからの赤外線量を減算し(差動増幅し)、この出力で鍋温度を検出するものである。つまり、第1の測定エリアからは、鍋底からの赤外線放射とトッププレートからのそれが加算されたものであり、第2の測定エリアからはトッププレート自身が放射する赤外線のみであり、第1のものから第2のものを減算することでトッププレートの温度に影響されない鍋温度の検出技術となっている。
【0007】
特許文献2の技術は、特許文献1と同様の考えであり赤外線検出部を安価な2組の感熱素子(サーミスタ等)で構成される第1の赤外線検知用感熱素子及び第2の赤外線補償用感熱素子とし、各第1及び第2の感熱素子に開口部からの赤外線を導く第1及び第2の導光部が形成される保持体をもつ。そして、第2の導光部が形成される保持体の入射開口部に赤外線遮光膜あるいは遮光材(断熱性弾性体を含む)を配置する。第1の赤外線検知用感熱素子出力と第2の赤外線補償用感熱素子出力を差動増幅することで鍋底の温度を正確に検出するものである。つまり、第1の導光部が形成される保持体下の第1の赤外線検知用感熱素子には、トッププレートを透過した鍋底からの赤外線とトッププレート自身の放射する赤外線が入射され、第2の導光部が形成される保持体下の第2の赤外線補償用検知用感熱素子には、遮光材がトッププレート下面に押し付けられているため概略トッププレート下面の温度になり、トッププレート自身が放射する赤外線に比例する赤外線が入射することになる。そして、第1の赤外線検知用感熱素子出力から第2の赤外線補償用感熱素子出力を減算(差動増幅)することで鍋底の温度を正確に検出する。
【0008】
特許文献3の技術は、特許文献1,2と同様の考えであり、天板(トッププレート)下面に配置される赤外線検出手段と、この赤外線検出手段出力から鍋底温度を検出する第1の温度検出手段と、天板下面に配置され天板の温度を検出する第2の温度検出手段(サーミスタ)と、赤外線検出手段の出力を第2の温度検出手段の出力に応じて減算する減算手段と備え、この減算手段の出力で検出した鍋温度を補正して、加熱コイルへの加熱出力を制御するものである。つまり、鍋底からの赤外線放射と天板からのそれが重畳された赤外線出力から第1の温度検出手段が出力する鍋温度と天板温度が加算されたものを、第2の温度検出手段から天板自身が放射する赤外線が赤外線検出手段に出力する天板温度を減算することで天板の温度に影響されない鍋温度の検出技術になっている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−111055号公報
【特許文献2】特開2004−63451号公報
【特許文献3】特開2006−40778号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1の鍋温度検出手段は、少なくとも2つのアレイを持つ赤外線検出部が必要となるため、高価にならざるを得ない。また、第2の測定エリアはトッププレート下面に赤外線を遮断する高価な黒体塗料を塗布して作成している。また、この黒体の放射率はトッププレート自身の放射率とは異なる。そのため、トッププレートと同じ温度にある黒体の赤外線量はトッププレート自身の赤外線量とは異なる。したがって第1の測定エリアからの赤外線量を検出する赤外線検出手段の出力から第2の測定エリアからの赤外線を検出する赤外線検出手段の出力を減算してもトッププレートの温度に影響されない正確な鍋温度の検出はできない。
【0011】
特許文献2の鍋温度検出手段は、赤外線検出に感熱素子(サーミスタ)を用いている。周知のようにサーミスタは温度によりその抵抗値が非線形に変化する。そして、第1の赤外線検知用感熱素子の検出温度(鍋)と第2の赤外線補償用感熱素子の検出温度(トッププレート)は大きく異なるため、素子の抵抗値は大きく非線形に異なることになる。したがって夫々の素子のこの抵抗変化出力に線形な減算を行っても、トッププレートの温度に影響されない正確な鍋温度の検出はできない。
【0012】
特許文献3の鍋温度検出手段は、第2の温度検出手段で天板(トッププレート)温度を検出し、これから天板自身が放射する赤外線が赤外線検出手段に出力する値を推定し、これを第1の温度検出手段の出力から減算することで天板の温度に影響されない正確な鍋温度が検出すると述べられているが、具体的な推定手段(方法)については言及されていない。更に後述するが、第1の温度検出手段の出力には天板からの赤外線量の他に、赤外線検出手段に赤外線を導光する導光筒あるいは検出手段周囲の構造物からの赤外線量も含まれる。これらを排除あるいは減算しなければ正確な鍋温度の検出はできない。
【0013】
赤外線センサで温度検出する場合の他の課題は、被測定物の放射率の影響を受けることである。鍋底の赤外線放射率は、鍋底の材質,色,加工状態(鍋底の塗装や鍋底の刻印,ヘアライン加工,リング加工,打ち込み加工等)に大きく依存する。また、同じ鍋であっても鍋底に付着した調理油等の汚れによって放射率が異なってくる。すなわち、同じ温度,同じ材質の鍋底であっても、色,加工あるいは汚れ状態が異なると放射する赤外線エネルギーが異なるため赤外線センサで受光する赤外線エネルギーも異なり、異なる温度が検出されることになる。このため、鍋底の相違により赤外線による温度検出が異なるのを補正する手段が必要になる。上記特許文献1,2,3には正確な鍋底温度検出に必要な放射率検出について言及されていない。
【0014】
本発明は赤外線センサとしてサーモパイルを用いた鍋温度検出手段において、トッププレート上に置かれる鍋の鍋底温度を、トッププレートおよび鍋底からの赤外線を赤外線センサに導く加熱コイルに設けた導光筒の温度あるいは赤外線センサの前面に配置される部材の温度に影響されずに、安定して精度良く検出することを可能にし、安全性,使い勝手の向上した誘導加熱調理器を提供することを目的とする。
【0015】
更に鍋底の材質,色,加工状態に拘らず正確に鍋底温度を検出する誘導加熱調理器を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記課題は、調理容器である鍋を上面に置く結晶化ガラスからなるトッププレートと、トッププレートの下に設けられ前記鍋を加熱するために誘導磁界を発生させる加熱コイルと、加熱コイルの下に設けられ、前記鍋底などから放射される赤外線を検出するサーモパイルからなる赤外線検出手段と、前記加熱コイルの支持部に設けられ、前記加熱コイルから放射される赤外線を遮断し、前記鍋底から放射される赤外線を前記赤外線検出手段に導く導光筒と、前記トッププレートの下面に配置されこの温度を検出する第1の温度検出手段と、前記導光筒に配置されこの温度を検出する第2の温度検出手段と、前記第1の温度検出手段の出力に基づき前記トッププレートから放射される赤外線量を算出する第1の赤外線量算出手段と、前記第2の温度検出手段の出力に基づき前記導光筒から放射される赤外線量を算出する第2の赤外線量算出手段と、前記赤外線検出手段の出力から、前記第1及び第2の赤外線量算出手段の出力を減算する減算手段と、前記加熱コイルへ高周波電力を供給する高周波電力供給手段と、高周波電力供給手段の出力電力を制御する電力制御手段と、前記減算手段の出力より前記調理容器の底面の温度を検出する鍋温度検出手段とを備える誘導加熱調理器によって解決できる。
【0017】
また、上記に加え、前記赤外線検出手段前面に前記トッププレートと同一光学特性を有する窓材を設け、窓材にこの温度を検出する第3の温度検出手段と、前記第3の温度検出手段の出力に基づき前記窓材から放射される赤外線量を算出する第3の赤外線量算出手段と、前記赤外線検出手段の出力から、前記第1及び第2及び第3の赤外線量算出手段の出力を減算する減算手段とを備える誘導加熱調理器によって解決できる。
【0018】
更に上記に加え、前記赤外線検出手段の近傍に配置される赤外線発光および受光素子と、前記赤外線発光素子が鍋底面に一定量の赤外線を投光し、この反射光を前記赤外線受光素子で受光し、この反射光の量から鍋底の放射率を計測する放射率計測手段とを備え、前記減算手段の出力を放射率計測手段の出力に基づき補正する補正手段とを備える誘導加熱調理器によって解決できる。
【発明の効果】
【0019】
本発明によれば、サーモパイル赤外線センサを用いて、調理時の周囲温度つまり、トッププレートおよび導光筒および赤外線センサ前面に配置する部材の温度によらず安定して加熱鍋底の温度を正確に検出する鍋温度検出手段を提供することができる。そして、正確に検出した高温部温度により適切に加熱コイルへの高周波電力を制御することで安全かつ最適な調理を可能にする誘導加熱調理器を提供できる。
【0020】
さらに、鍋底温度を検出するサーモパイル赤外線センサの近傍に赤外線発光および受光素子を配置して温度検出と同一視野で鍋底の放射率を計測し、赤外線センサの出力を補正することで鍋底の材質,色,加工状態あるいは汚れの状態に拘らず正確に鍋底温度を検出することが可能になり、正確に検出した鍋底温度を用いて加熱の制御を行うことができるので、上手に調理をすることが可能となる。
【図面の簡単な説明】
【0021】
【図1】実施例1の誘導加熱調理器の構成を示す斜視図。
【図2】実施例1の誘導加熱調理器の構成を示す断面図。
【図3】実施例1の加熱コイル周辺の詳細を示す断面図。
【図4】実施例1の加熱コイルおよび鍋温度検出装置の配置を示す平面図。
【図5】実施例1の加熱コイルの裏面を示す平面図。
【図6】実施例1の鍋温度検出装置の平面および断面図。
【図7】実施例1の反射型フォトインタラプタを示す図。
【図8】実施例1のサーモパイルの詳細を示す平面および断面図。
【図9】実施例1の誘導加熱調理器の制御ブロック図。
【図10】実施例1のサーモパイル温度検出回路の詳細を示す図。
【図11】実施例1の反射率検出回路の詳細を示す図。
【図12】実施例1の反射率検出回路の動作タイミングチャート。
【図13】プランクの分布則による分光放射エネルギーを示す図。
【図14】本実施例で使用するトッププレートなどガラスの光学特性を示す図。
【図15】実施例1の各部材とその放射赤外線エネルギーを示す模式図。
【図16】実施例1のサーモパイルの視野特性。
【図17】実施例1の各部温度と赤外線吸収膜への入射赤外線エネルギーの関係を示す図。
【図18】実施例1の黒体(鍋底)温度とサーモパイル温度検出回路出力の関係を示す図。
【図19】実施例1のトッププレート温度とサーモパイル温度検出回路出力の関係を示す図。
【図20】実施例1のセンサ視野筒および結晶化ガラス光学フィルタ温度とサーモパイル温度検出回路出力の関係を示す図。
【図21】実施例1の反射率検出回路の鍋有無による出力説明図。
【図22】実施例1の反射率検出回路の反射電圧と反射率の関係を示す図。
【図23】実施例1の各種鍋の鍋底温度と鍋温度検出回路出力の関係を示す図。
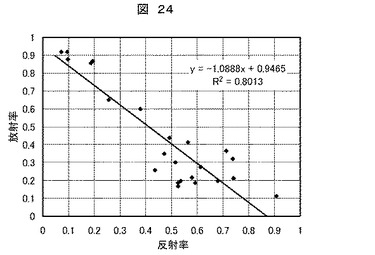
【図24】実施例1の各種鍋放射率と反射率の関係を示す図。
【図25】実施例1の誘導加熱調理のフローチャート。
【図26】実施例1の反射率検出のフローチャート。
【図27】実施例1の鍋温度検出のフローチャート。
【図28】実施例2の加熱コイルを示す平面図。
【図29】実施例2の鍋温度検出のフローチャート。
【発明を実施するための形態】
【0022】
本発明の実施例を図面に基づいて説明する。
【実施例1】
【0023】
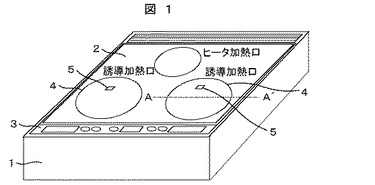
図1は実施例1の誘導加熱調理器の本体1の斜視図であり、図2は図1中に一点鎖線AA′で示される部分に調理鍋6を載せたときの概略縦断面図である。以下では、誘導加熱が可能な鍋置き場所が2口、ラジエントヒータやハロゲンヒータ等のヒータ(加熱源)の放射熱で加熱可能な鍋置き場所が1口ある3口の誘導加熱調理器を例に挙げ説明を行うが、本発明の適用対象はこれに限られず例えば誘導加熱が可能な鍋置き場所を3口設けた誘導加熱調理器であっても良い。なお、調理鍋6は、誘導加熱に適した磁性体の鉄鍋であっても良いし、非磁性体のアルミ鍋,銅鍋であっても良い。
【0024】
図1および図2に示すように、本体1の上面には、結晶化ガラス等の非磁性体によって形成されたトッププレート2が装着されている。また、トッププレート2の手前には、各口の加熱開始あるいは加熱コースを指示するスイッチ,各口の加熱状態(温度等)を表示する表示器が配置される操作表示部3が装着されている。
【0025】
トッププレート2の上面には、その下に配置される加熱コイル7あるいはラジエントヒータの最外半径におよそ一致する半径の円表示4が加熱可能な鍋置き場所を示すために印刷されている。また、トッププレート2は普通可視光に対して透明であるため、上面にはフリットガラスに耐熱塗料を混入した耐熱耐久性の衣装印刷、下面には耐熱面塗装を施し、機器内部が見えないようにしてある。誘導加熱が可能な鍋置き場所2口の円表示4の中央から約50mmずれた位置に後述する鍋温度検出のために印刷,塗装を行っていない赤外線透過窓5が設けられている。この赤外線透過窓5は赤外光を透過させるためであり、この部分だけ赤外光に対しては透明な可視光カット部材(耐熱フィルムまたはガラス)を下面に装着しても良い。
【0026】
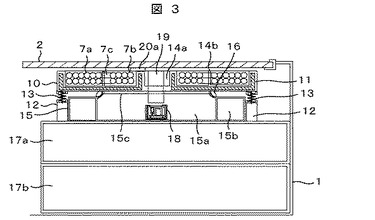
トッププレート2の上面の各口(円表示4)に、調理鍋6を置き加熱調理を行う。図2に示すように、加熱コイル7にインバータ回路8(高周波電流供給手段)からの高周波電流を供給すると、外周側の第1のコイル7aと内周側の第2のコイル7bに分割された加熱コイル7が高周波磁界9(図中破線で示す)を発生し、この高周波磁界が調理鍋6と鎖交して、渦電流を発生し、そのジュール熱により調理鍋6自身が誘導加熱され発熱する。従って、調理鍋6内の調理物は、調理鍋6自身の発熱によって加熱調理される。このとき、調理鍋6の下にあるトッププレート2も、発熱した調理鍋6からの伝熱あるいは放射熱により高温になる。
【0027】
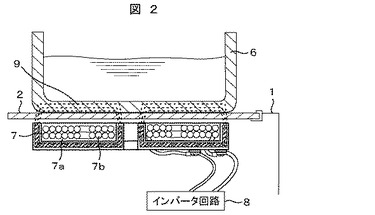
図3に加熱コイル7周辺の断面を詳しく示す。図3に示すようにトッププレート2下面には第1のコイル7aと第2のコイル7bの間にコイル間隙7cを備えて分割された加熱コイル7が耐熱プラスチックで構成されるコイルベース10内に同心円状(渦巻き状)に巻かれて配置される。加熱コイル7の下側にはコイルベース部材内部にコ字状のフェライト11が凸部を上にして放射状に配置されている。このフェライト11は加熱コイル7が発生する磁束をトッププレート2上の調理容器である調理鍋6に効率良く導くために配置される。また、磁束がコイルベース10下部に漏洩するのを防止する。フェライト11は透磁率が高く磁束はほとんどフェライト11内を通過するからである。
【0028】
コイルベース10の下には加熱コイル7を冷却するためのコイル冷却風路15が設置される。コイル冷却風路15は二つに分けられ、一つは第1のコイル7aの内周側に接続され、第2のコイル7bおよび第1のコイル7a上面を冷却するコイル上面冷却風路15a、他の一つは第1のコイル7aの下面を冷却するコイル下面冷却風路15bである。コイルベース10の中心部分下に位置するコイル上面冷却風路15aの上面には円形上のコイル上面冷却風送出孔15cが開口している。
【0029】
コイルベース10の中心部は円筒状の内空洞14aになっており、第1のコイル7aの内周側にはフェライト11を内蔵する放射上梁に繋がる円筒状の外空洞壁14bになっている。この外空洞壁14bの下部に、コイル上面冷却風路15aのコイル上面冷却風送出孔15cが接続される。コイル上面冷却風送出孔15cの周囲にはグラスウール等のシール材16が設けられ先の外空洞壁14bに接続されている。
【0030】
コイル冷却風路15の下にはインバータ回路8等の回路基板を内蔵する回路冷却風路17a,17bが2段重ねて設けられ、夫々には左右の加熱コイル7L,7Rのインバータ回路等が内蔵されている。これらの冷却風路は本体1に固定される。
【0031】
コイルベース10はコイル下面冷却風路15bまたは回路冷却風路17aに固定される3個のコイルベース受け12からバネ13で押され、トッププレート2の下面に押し付けられる。
【0032】
コイル上面冷却風送出孔15c下のコイル上面冷却風路15a中には鍋温度検出装置18が配置される。鍋温度検出装置18は誘導加熱された調理鍋6の底面温度をトッププレート2の赤外線透過窓5を透過する赤外線から検出する。
【0033】
加熱調理中にはコイル上面冷却風路15a,コイル下面冷却風路15b,回路冷却風路17a,17bには本体1に内蔵されるファン(図示せず)から外気が導入される。コイル上面冷却風路15a内を流れる冷却風は鍋温度検出装置18を冷却しながらコイル上面冷却風送出孔15cから円筒状の外空洞壁14b内のコイル間隙7cおよび内空洞14aを上昇し、コイル間隙7cおよび内空洞14a上部から、トッププレート2に遮られトッププレート2と加熱コイル7の間をコイル径方向外側に流れ、加熱コイル7の上面およびトッププレート2下面を冷却する。コイル下面冷却風路15bのコイル7aの下面にあたる部分には小さな孔が複数開けられ、コイル下面冷却風路15b内を流れる冷却風は、ここからコイル7a下面に向かって噴流してこれを冷却する。
【0034】
図4にトッププレート2を除いた図3の上面図の詳細を示す。加熱コイル7,コイルベース10,コイル上面冷却風路15aの詳細構成図である。加熱コイル7および内空洞14aと鍋温度検出装置18の水平面での位置関係を示す。
【0035】
加熱コイル7は、テフロン(登録商標)等で絶縁被膜されるリッツ線で同心円状に同一方向に巻回され、外周側の第1のコイル7aと内周側の第2のコイル7bに分割される。そのコイル間隙7cは幅およそ15mmの同心帯状をなし、第1のコイル7aの巻き終わりはコイル間隙7cを架橋し第2のコイル7bの巻き始めとなり、第1のコイル7aと架橋線7dと第2のコイル7bで加熱コイル7を構成する。コイルベース10には第1のコイル7aの内周側に円筒状の外空洞壁14bが設けられ、その内側がコイル間隙7cとなっている。また、第2のコイル7bの内周側に内空洞14aが設けられる。さらに、コイル間隙7cの一部、放射状に配置される二つのフェライト11間に円筒状の視野筒19(内径約12mm)が設けられ、この視野筒19の下に鍋温度検出装置18が設置される。
【0036】
視野筒19の上部横にはトッププレート2の赤外線透過窓5の横下面に接触するようにサーミスタ20a(第1の温度検出手段)が設置される。
【0037】
誘導加熱された鍋底面からの赤外線はトッププレート2の赤外線透過窓5を透過し、視野筒19から後で詳細に説明する鍋温度検出装置18に内蔵されるサーモパイル25に入射する。
【0038】
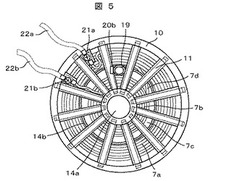
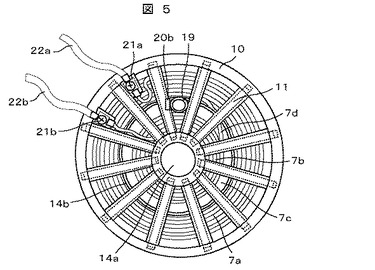
図5は先の図4を裏から見た図を示す。コイルベース10には2個の低電圧端子21a,高電圧端子21bが設けられ、低電圧端子21aには第1のコイル7aの巻き始めが接続され、高電圧端子21bには第2のコイルの巻き終わりが接続される。この端子にはインバータ回路8の出力線22a,22bがねじで固定される。銅やアルミニウム等の非磁性体の鍋では4〜5kVの高電圧が出力される高電圧出力線22bは高電圧端子21bに接続される。視野筒19の下部外壁側面にはサーミスタ20b(第2の温度検出手段)が視野筒19の内壁温度を検出するように壁内部に埋め込まれる形に設置される。
【0039】
図4,図5で説明したように鍋温度検出装置18は、架橋線7dの近傍をさけ、かつ高電圧出力線22bが接続される高電圧端子21bから離れた位置にあるコイル間隙7cに設けられた視野筒19の下にそのケース窓30が位置するように設置される。
【0040】
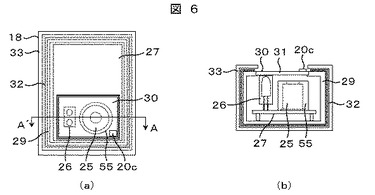
図6に鍋温度検出装置18の詳細を示す。
【0041】
図6(a)は、鍋温度検出装置18の平面図を示す。鍋温度検出装置18は、ヒートシンク55を被せた赤外線検出センサ(サーモパイル25)と反射型フォトインタラプタ26を中心に構成される。サーモパイル25と反射型フォトインタラプタ26はサーモパイルの出力信号を増幅するサーモパイル温度検出回路72(後で詳細を説明する)と反射率検出回路73(後で詳細を説明する)が実装される電子回路基板27に配置され、このサーモパイル25と反射型フォトインタラプタ26および電子回路基板27は、全体をプラスチック部材の赤外線センサケース29(一点鎖線で示す)内に密封される。この赤外線センサケース29には赤外線を透過させるためにケース窓30が開けられ、このケース窓30にはトッププレート2を構成する結晶化ガラスとほぼ同じ光学特性(但し図14破線で示すように1μm以上の長波長側の光学特性はほぼ同じだが、短波長側でトッププレートに比べて透過率小の領域が400nmほどあり、この部分の可視光がカットされるため目には赤黒く見える)を持つ結晶化ガラスを薄く正方形に切り出したものを結晶化ガラス光学フィルタ31として嵌め込んである。また、結晶化ガラス光学フィルタ31の上面にはその温度を検出するサーミスタ20c(第3の温度検出手段)が設けられている。
【0042】
そして、結晶化ガラス光学フィルタ31の下にヒートシンク55を被せたサーモパイル25と反射型フォトインタラプタ26が電子回路基板27上に実装されている。この赤外線センサケース29は、周りをアルミニウム等の透磁率がほぼ1の金属ケース32(2点鎖線で示す)で覆っている。当然、先のケース窓30の所は開口されている。そして、更にアルミニウム製の金属ケース32は、周りをプラスチック部材の外側赤外線センサケース33で覆っている。当然先のケース窓30の所は開口されている。つまり、サーモパイル25は3重のケースで覆われた形になっている。
【0043】
そして、鍋温度検出装置18はそのケース窓30がコイルベース10の視野筒19内を望むようにコイル上面冷却風路15a内に設置される。
【0044】
図6(a)中のA−A′線に沿った断面図を図6(b)に示す。これは、赤外線センサケース29内に設置される電子回路基板27に装着されるサーモパイル25および反射型フォトインタラプタ26と赤外線センサケース29のケース窓30,結晶化ガラス光学フィルタ31との位置関係を示す断面図である。
【0045】
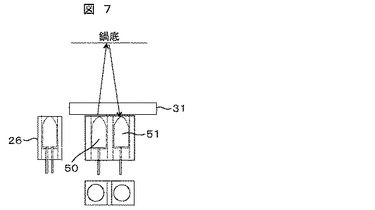
図7に反射型フォトインタラプタ26の詳細を示す。反射型フォトインタラプタ26は赤外線発光素子としての赤外線LED50と赤外線受光素子としての赤外線フォトトランジスタ51を同一プラスチック部材に並べてモールドしたものである。赤外線LEDの発光面上にはプラスチックでレンズが構成され細いビームで930nm付近の赤外光を上方に照射する。赤外線フォトトランジスタ51の受光面上には可視光阻止のプラスチックでレンズが構成され、先の照射赤外光の物体(鍋底面)での反射赤外光を狭い視野角で受光し、その受光量に比例した電流を出力する。この反射型フォトインタラプタ26は赤外線発光素子と受光素子の対で構成されるものでトッププレート2上に置かれた調理鍋6底面の反射率を計測するものである。
【0046】
反射型フォトインタラプタ26前面の発光,受光部を結晶化ガラス光学フィルタ31の下面直下に配置している。これは赤外線発光が直上の結晶化ガラス光学フィルタ31で反射され、受光されるのを防止するためである。
【0047】
赤外線LED50の赤外線発光は結晶化ガラス光学フィルタ31を85%以上透過するが、残り15%は反射され、すぐ横の赤外線フォトトランジスタ51で受光される。この反射光はすぐ横の赤外線フォトトランジスタ51で受光される。この受光レベルは反射面との距離が短いと大きく、本来目的であるトッププレート2上にある鍋底面での反射光の受光に影響する。このため、本実施例では、図示するように結晶化ガラス光学フィルタ31と反射型フォトインタラプタ26(赤外線LED50および赤外線フォトトランジスタ51)の発光・受光面との距離を500μm以内程度にまで接近させ、赤外線LED50の発光赤外線が結晶化ガラス光学フィルタ31で反射する反射分が赤外線フォトトランジスタ51で受光されないようにしている。理想的には結晶化ガラス光学フィルタ31下面と反射型フォトインタラプタ26の上面を接触させたほうが望ましい。
【0048】
図8にサーモパイル25の詳細を示す。図8(a)はヒートシンク55とサーモパイル25の斜視図を示す。図8(b)はヒートシンク55を除いた図8(a)中B−B′で示す線でのサーモパイル25の断面図であり、図8(c)は図8(b)中C−C′で示す線での断面の平面図である。なお、熱電対が見えるように、赤外線吸収膜を省略して示してある。
【0049】
サーモパイル25は熱電対(サーモカップル)を多数縦列接続した(パイリング)したもので、ニッケルめっき鋼板等の金属キャン35と金属ステム36からなる金属ケース37内にこれが内蔵されている。およそ300μm厚のシリコン基材38表面に電気的および熱的に絶縁するためシリコン酸化膜39を形成し、この上にポリシリコン,アルミを順次パターン蒸着しポリシリコン蒸着膜40,アルミ蒸着膜41で熱電対を多数作成し、これを縦列接続する。ポリシリコン,アルミ接合点(測温接点)のあるシリコン基材38中央部には、黒体に近い酸化ルビジウム膜等の赤外線吸収膜43を形成する。ポリシリコンおよびアルミ蒸着膜の一端は冷接点部44であり、これはシリコン基材38の周囲に配置する。シリコン基材38の裏面を周囲(冷接点部)を残して290μmまでエッチングし、測温接点部分のあるシリコン基材の厚みを10μmに形成する。これは熱電導の良好なシリコンを薄くすることで、測温接点部42と冷接点部44の熱伝導を少なくし測温接点部と冷接点部を熱的に絶縁するためである。
【0050】
このシリコン基材38を金属ケース37の金属ステム36にボンド等で固定する。同時に金属ステム36にはセラミック上に膜形成したNTCサーミスタ45を同様に配置する。これは金属ケース37内にある熱電対の雰囲気温度を検出し、熱電対の熱起電力を補正するためである。詳細は後述する。金属ステム36には絶縁シールされた4本の金属ピン46が貫通配置されており、この金属ピンに先の熱電対の出力とNTCサーミスタ45がワイヤ接続される。金属ステム36には、筒状の金属キャン35が不活性ガス中で被せられ溶着される。この金属キャン35の上面には小穴の窓47が開けられ、ここに内側からガラス凸レンズ48が装着されている。この小穴の垂直下に先の測温接点部42(赤外線吸収膜43の下にある)が位置するようにシリコン基材38が固定される。このガラス凸レンズ48は赤外線透過窓5の視野範囲が赤外線吸収膜43に結像するように設計される。
【0051】
サーモパイル25内の熱電対の測温接点部42(赤外線吸収膜43の下にある)にはこの小穴の窓47を通過しガラス凸レンズ48で集光された赤外線で加熱され、この加熱温度上昇は通過した赤外線エネルギーに比例し、熱電対の冷接点部44と測温接点部42の温度差に比例した電圧が熱電対出力の金属ピン46に出力される。
【0052】
前述したようにサーモパイル25は金属ケース37が熱的には熱電対の冷接点と同じであり、この温度変動がそのままサーモパイル25の出力変動となってしまう。そのため、ヒートシンク55を熱バッファ(熱容量を大きくする)として装着して周囲温度変化に対する出力変動を減少させる。
【0053】
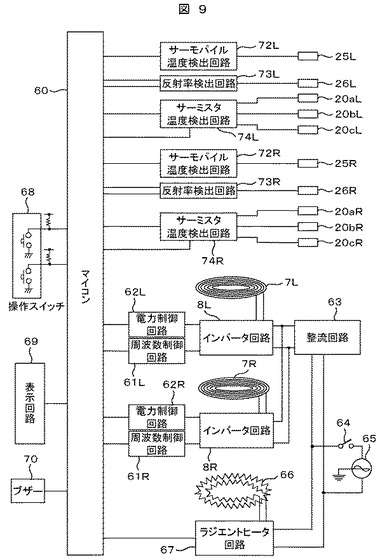
図9に本実施例の誘導加熱調理器の制御ブロック図を示す。マイクロコンピュータ60が誘導加熱調理器の動作を制御する。以下記号Rは図1の手前右にあるに誘導加熱口に関するブロックを表し、記号Lは図1の手前左にある誘導加熱口に関するブロックを表す。2つのインバータ回路8Rおよび8Lは加熱コイル7R及び7Lに高周波電流を供給する。このインバータ回路8R,8Lの動作周波数及びコイルへの供給電力を調整するのが周波数制御回路61R,61L及び電力制御回路62R,62Lである。動作周波数を変化させるのは、鍋の金属種類によって高周波電流の周波数で誘導加熱効率が変化するためである。一般に鉄では20kHz、これより抵抗率の低い銅,アルミでは70kHz以上の周波数が用いられる。この周波数切り替えは図示しない鍋種類判別手段の判断に基づいてマイクロコンピュータ60が周波数制御回路を制御して行う。
【0054】
各インバータ回路8R,8Lには整流回路63から直流電圧が供給される。この整流回路63には電源スイッチ64を介して3端子200Vの商用電源65が接続されている。商用電源の接地端子は本体1の金属部に接地線で接続される。ラジエントヒータ66にはラジエントヒータ回路67を介して商用電源65が接続され、ラジエントヒータ回路67がラジエントヒータ66に供給する電力を制御する。
【0055】
マイクロコンピュータ60には、操作表示部3の操作スイッチ68,表示回路69が接続され使用者の操作指示を受け付け、機器の動作状態表示を行う。また、ブザー70が接続され使用者の操作ボタン押しあるいはエラー等の警告などを報知する。マイクロコンピュータ60は使用者の指示に従い、周波数制御回路61R,61Lと電力制御回路62R,62L及びラジエントヒータ回路67を制御して、トッププレート2上の調理鍋6を加熱する。
【0056】
サーモパイル25はサーモパイル温度検出回路72に接続され出力が増幅され、マイクロコンピュータ60のAD端子に入力される。反射型フォトインタラプタ26は反射率検出回路73に接続され、マイクロコンピュータ60のポート出力で発光素子の発光を制御され、調理鍋6で反射された赤外光は受光素子で受光され、その出力信号は増幅されマイクロコンピュータ60のAD端子に入力される。サーモパイル温度検出回路72および反射率検出回路73の動作の詳細は後述する。更にサーミスタ20aR,20bR,20cRはその入力を選択してその温度検出値を順次マイクロコンピュータ60のAD端子に出力するサーミスタ温度検出回路74Rに接続され、その出力はマイクロコンピュータ60のAD端子に入力される。同様にサーミスタ20aL,20bL,20cLもサーミスタ温度検出回路74Lに接続され、その出力もマイクロコンピュータ60のAD端子に入力される。
【0057】
赤外線量算出手段,減算手段,反射率補正手段はマイクロコンピュータ60のソフトウエアで行われる。後で詳細は述べる。マイクロコンピュータ60は各サーミスタでトッププレート2,視野筒19,結晶化ガラス光学フィルタ31の温度を知り、各部材の放射赤外線量に相等する電圧を得る。前記温度から電圧への変換は後述する方法で予めテーブルの形で記憶されている(赤外線量算出手段の動作)。
【0058】
そして、マイクロコンピュータ60はサーモパイル温度検出回路72の出力から先の各電圧を減算し、トッププレート2,視野筒19,結晶化ガラス光学フィルタ31の影響を相殺する(減算手段の動作)。
【0059】
また、マイクロコンピュータ60は反射率検出回路73の出力から調理鍋の赤外線反射率を知り、先の減算結果を反射率で補正して調理鍋の温度を検出する。この処理もマイクロコンピュータ60のソフトウエアで行われる(反射率補正手段の動作)。そして、電力制御回路62を介して、調理鍋6の加熱を制御する。この処理法の詳細は後述する。
【0060】
図10にサーモパイル温度検出回路72の詳細を示す。サーモパイル25の熱電対出力(熱起電力)(図中(+),(−)記号間の電圧)はオペアンプ72−1で約2000倍に増幅され出力端子72−2に出力される。この出力電圧はマイクロコンピュータ60のAD端子に入力される。オペアンプ72−1の増幅度は抵抗72−3(=R1)と抵抗72−4(=R2)の比(R2/R1)で決まる。また、サーモパイル内のNTCサーミスタ45は、回路電源電圧を抵抗72−5,72−6,72−7で分圧された電圧源(抵抗72−6の両端)に抵抗72−8と直列接続された状態で接続され、この抵抗72−8との接続点aは熱電対出力端子(−)に接続されている。NTCサーミスタ45は負の温度特性を持った抵抗素子であり温度上昇で抵抗値が低下する。このため、サーモパイル25内の温度が上昇すると先の接続点aの電圧は上昇する。熱電対出力(図中(+),(−)記号間の電圧)は測温接点42(赤外線エネルギーで加熱される点)と冷接点部(熱電対出力端子)44の温度差に比例する。このため、サーモパイル25の設置される雰囲気温度で金属ケース37内雰囲気(NTCサーミスタが内蔵される)温度が上昇すると熱電対出力は減少する。この減少を接続点aの電圧上昇で補償する。すなわちNTCサーミスタ45はサーモパイル(熱電対)25の出力すなわち測定対象の放射赤外線エネルギーによる出力が周囲温度で変化するのを防ぐために使用される。つまり、サーモパイル25の周囲温度が変化しても、測定対象の温度すなわち入射する赤外線エネルギーが変化しなければ出力変化を起こさないという冷接点温度補償を行っている。
【0061】
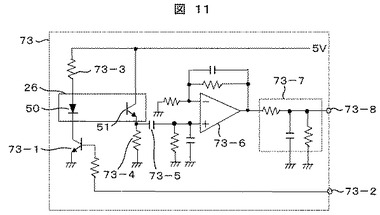
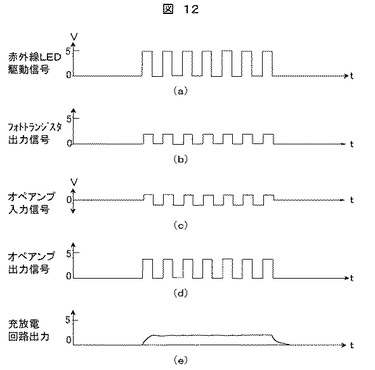
図11,図12を用いて反射率検出回路73の詳細を示す。図11において、50は発光素子である赤外線LEDであり、例えばその発光波長は930nmである。51は赤外線フォトトランジスタであり、例えばピーク感度波長が800nmで赤外線LED50の発光波長930nmでもピーク感度の80%の感度をもつものである。また、可視光をカットする光学フィルタが受光面に配置されている。図12に反射率検出回路73の動作タイミングチャートを示す。反射型フォトインタラプタ26の発光素子である赤外線LED50はトランジスタ73−1で駆動される。この駆動はマイクロコンピュータ60の出力ポートから駆動信号端子73−2に入力される信号で制御される。図12(a)にこの信号を示す。デューティ50%の矩形波信号を駆動信号端子73−2に入力すると、赤外線LED50は信号が5Vのとき発光し、0Vのときは消灯する。この発光強度は赤外線LED50に流す電流に比例し、この電流は抵抗73−3の値で決められる。本実施例では抵抗値を固定して発光強度は一定である。この赤外発光がトッププレート2及び調理鍋6の底面で反射され、受光素子である赤外線フォトトランジスタ51で受光されると光電流により抵抗73−4に電圧が発生する。この電圧を図12(b)に示す。反射が大きく(受光量が多く)なれば電圧は比例して大きくなる。この信号電圧はコンデンサ73−5で直流分がカットされ、交流信号(図12(c)に示す)としてオペアンプ73−6で構成される正転直流増幅器に入力される。ここで交流信号のプラス側成分のみが増幅される。図12(d)にこれを示す。この増幅されたデューティ50%の信号は充放電回路73−7で直流の平均値電圧に変換され、出力端子73−8から出力される。この出力はマイクロコンピュータ60のAD端子に入力される。
【0062】
このように反射率検出回路73は発光強度が一定のキャリア変調された赤外光を鍋底面に放射し、鍋で反射される赤外光を受光してその平均値電圧を反射電圧として得ることで反射率に相当する値を検出する。調理鍋6が置かれていない場合にはトッププレートのみでの反射でありこれは一定の値を示す。これからの増加分が鍋からの反射分であり、この量が鍋の反射率に相当するものである。
【0063】
赤外発光をキャリア変調し、受光経路で直流成分をカットしているのは、自然光あるいは白熱電灯,蛍光灯などの照明機器に含まれる一定の赤外光が鍋の反射率検出に影響するのを防止するためである。(可視光は受光素子の光学フィルタでカットされる。)また、赤外線フォトトランジスタ51の暗電流の影響も防止している。
【0064】
以下本実施例1の動作を説明する。
【0065】
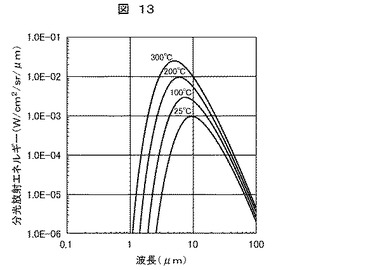
トッププレート2上に置かれた調理鍋6は誘導加熱により発熱する。この加熱により調理鍋6底面からは赤外線が放射される。この全放射エネルギーEは鍋温度Tの4乗に比例したものである。(E=σT4;ステファン・ボルツマンの法則)図13にプランクの分布則から算出される黒体温度の分光放射エネルギーを示す。この分光放射エネルギーを全波長域で積分すれば、全放射エネルギーEが求まり、これは温度(絶対温度)の4乗に比例する。これが前述のステファン・ボルツマンの法則であり、この係数σがステファン・ボルツマン係数である。分光放射エネルギーのピーク波長はウィーンの変移則から、調理温度100〜300℃で5μm〜8μmである。
【0066】
誘導加熱された鍋底は、黒体温度の全放射エネルギーEに鍋底の放射率εを乗じた全放射エネルギーを温度に応じて放出する。すなわち黒体温度の全放射エネルギーEと鍋底温度のそれ(E′=εσT4)との比が放射率εである。
【0067】
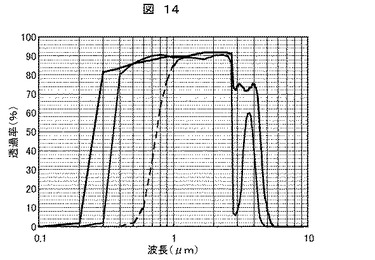
一方、非磁性体である結晶化ガラス(トッププレート2)の光学特性を図14に実線で示す。図14に実線で示すように、結晶化ガラスは、0.2μm〜2.9μmの波長の光を80%以上透過し、3〜4.5μmの波長の光を30%程度透過し、4.5μmよりも長い波長、及び、0.2μmよりも短い波長の光をほとんど透過しない。この光学特性のため鍋から放射される赤外線放射エネルギー(図13参照)の大部分(波長5μm以上の大部分)はトッププレート2を通過できない。通過できるのは鍋から放射される全赤外線放射エネルギーの1%程度である。
【0068】
赤外線センサとしては周知のように、赤外線フォトダイオード,赤外線フォトトランジスタのような量子型とサーモパイル,焦電素子のような熱型とがある。量子型センサは量子効果で赤外線を検出するため狭い波長帯域で高い感度を持ち、熱型は広い波長帯域で低い感度を持つのが特徴である。量子型は半導体の種類で感度波長が決められ、シリコンのように安価に購入できるものは実用感度波長が可視光外(0.8μm)から1μm以下のため、検出温度の範囲が300℃以上となる。一方熱型は量子型に比べ、可視光から20μm以下の広い波長帯域で均一の低い感度を持つ(原理的には波長依存性を持たない)。このため、センサへの赤外線受光面の前に光学フィルタを設け、検出温度範囲波長を狭めて外乱を防ぐ。
【0069】
本実施例では、調理温度範囲が100から300℃であるため、赤外線センサとして熱型であるサーモパイルを用いる。同じ熱型の焦電素子は微分型のセンサであるため、赤外線入射を断続する必要があり、普通機械的なチョッパ機構が使われる。このため、信頼性の点で誘導加熱調理器のような家電品に用いるのは不向きである。一方サーモパイルはこのような機構を必要とせず、また、近年MEMS等の技術により半導体プロセスを用い構成する熱電対を微小化し多数堆積(パイリング)して感度を向上させたものが安価に供給されている。
【0070】
近年多くの体温計に用いられるサーモパイルの光学フィルタとしては透過波長が1〜15μmのものが使われる。これはウィーンの変移則から人体の赤外線放射エネルギーのピーク波長が約10μm(体温36℃)であり、上記光学フィルタを用いるのが最適なためである。
【0071】
この光学フィルタを有するサーモパイルを用いて、トッププレート2を通して調理鍋の温度(25〜300℃)を非接触で計測しようとすると、前述したようにサーモパイルに到達する赤外線エネルギーは約1/100に減衰するためとほとんど計測できない。
【0072】
そのため、本実施例の鍋温度検出装置18では、サーモカップル(熱電対)を半導体プロセスで比較的容易に作成できるポリシリコン・アルミニウム金属対とし、これを50ほど堆積したサーモパイル25を用い、その出力を増幅回路で2000倍に増幅し微小な赤外線エネルギーを検出できるようにしている。
【0073】
サーモカップルで物体の温度を計測する場合には、冷接点を氷点(0℃)に固定して測温接点を物体に接触させて計測する。サーモパイルは図8で説明したように、サーモカップルが多数堆積されたものであり、入射赤外線で加熱される多数の測温接点とシリコン基材38上にある多数の冷接点で構成される。そして、冷接点は金属ケース37の金属ステム36にボンドで固定されるため、熱的にはサーモパイルの金属ケース37(金属キャン35と金属ステム36)が冷接点となっている。そして、この金属ケース37は通常のサーモカップルのように氷点に固定することができない。
【0074】
仮に、一つのサーモカップルの熱起電力が5μV/℃、パイル数50、直流増幅器の増幅度を2000とすると、金属ケース37の温度が1℃変化すると、直流増幅器の出力では500mVの電圧変動になる。つまり、サーモパイル25周囲の温度変動を押さえることが必要になる。
【0075】
本実施例の鍋温度検出装置18は、加熱調理中の鍋底高温部を検出可能にするために、分割された加熱コイル7が発生する高周波磁界の磁束密度が最も強いコイル間隙7c直下に配置される。この位置は、加熱コイル7の下に放射状に配置される棒状のフェライト11の間であり、磁束はほとんどフェライト中を通過するため漏れ磁束の少ない場所ではある。しかし、加熱コイル7下面からの距離は20mm程度であるため漏れ磁束は大きく、ここに位置する金属を誘導加熱しその温度を上昇させる。例えば3kWの高周波電力を加熱コイルに入力してトッププレート2上に載置される調理容器である鍋を誘導加熱する場合には、この場所にある磁性体の鋼板では約30℃も温度上昇する。非磁性体のアルミニウムでも約5℃も温度上昇する。
【0076】
調理中、誘導加熱される鍋底は100〜300℃の高温になる。そして、トッププレート2および下面の加熱コイル7も鍋底からの熱伝導,熱輻射で高温となる。
【0077】
さらに、加熱コイル7には十数アンペアの高周波電流を流すためコイル自身もジュール発熱する。これらトッププレート,加熱コイルを冷却するため、コイル上面冷却風路15a,コイル下面冷却風路15bには外気が導入され、前述のように加熱コイル7に風を当てて冷却する。
【0078】
また、鍋温度検出装置18の配置される下には加熱コイルに高周波電力を供給するインバータ回路8が冷却風路17a,17b中に配置される。このインバータ回路は20〜90kHz、十数アンペアの電流をスイッチングする回路から構成される。このため、大きな電磁波を輻射することになる。
【0079】
このように、鍋温度検出装置18、特に内蔵されるサーモパイル25は、(1)加熱コイル7からの漏れ磁束、(2)コイル冷却のための冷却風による温度変化、(3)インバータ回路から輻射される電磁波ノイズ、に晒されることになる。これら外乱に対応して、鍋温度検出装置18は加熱調理中の鍋底高温部を検出しなければならない。
【0080】
前述したサーモパイル温度検出回路72の動作説明のごとく、サーモパイル25の出力が雰囲気温度で変化しないように、内蔵のNTCサーミスタ45を用いて回路的に温度補償をしている。しかし、NTCサーミスタ45はセラミックチップの上に薄膜で形成され、これを金属ステム36にボンド等で固定されているため、熱的には冷接点と等価である金属ステム36すなわち金属ケース37の温度変化に追従しにくく、時間遅れが生じる。また、温度抵抗特性の非線形性のため広い温度範囲で正確に温度補償するのが難しい。これらの点でサーモパイル25の周囲温度変化に即応して前述回路で十分な温度補償を行うのは難しい。具体的には1℃/数10分程度の温度変化には対応できるが、1℃/1分程度の温度変化に追従させるのは困難である。前述したように、誘導加熱調理開始と同時に加熱コイル7を冷却するため外気が導入される。前の調理である程度、鍋温度検出装置18と周囲の雰囲気温度が上昇していた場合には、このとき鍋温度検出装置18は急速に(1℃/1分以上で)冷却されることになる。
【0081】
サーモパイル25が内蔵される鍋温度検出装置18はなるべく一定温度雰囲気におくのが望ましい。このため、本実施例では、外気が導入されるコイル上面冷却風路15a内に鍋温度検出装置18を設置し調理中には外気でサーモパイル25とサーモパイル温度検出回路72を冷却しこれらの温度上昇を防止している。また、コイル上面冷却風路15a内の気流がサーモパイル25の金属ケース37およびサーモパイル温度検出回路72の半導体,抵抗等に直接当たり熱ゆらぎを起こすのを防ぐため、防風ケースである赤外線センサケース29でこれを覆っている。また、サーモパイル25とサーモパイル温度検出回路72は赤外線センサケース29内の空気で空気断熱されることにもなる。温度変化に対して安定にサーモパイル25の出力を直流増幅した後低い出力インピーダンスの信号電圧として、後述するマイクロコンピュータ60のAD端子に出力している。
【0082】
さらに、この赤外線センサケース29をアルミニウム等の透磁率がほぼ1である金属ケース32で覆い、加熱コイルが発生する交流磁場を遮蔽することでサーモパイル25の金属ケース37が加熱コイル7の発生する高周波交流磁界で誘導加熱され温度上昇しないようにしている。また、この金属ケース32は、鍋温度検出装置18の下部に配置されるインバータ回路からのパルス雑音(放射電磁波)に対しての電磁シールドにもなっている。
【0083】
この金属ケース32は、加熱調理中には周囲雰囲気温度および加熱コイル7からの漏れ磁束で誘導加熱され、アルミニウムの場合5〜10℃温度上昇する。この温度上昇がおさまる前に続けて調理を行う場合、外気を急速に導入して金属ケース32に当てると金属ケース32が急速に冷え、結果赤外線センサケース29内のサーモパイル25の周囲温度が急に低下することになる。この逆の場合、例えば冬朝一番に調理を行う場合、機体内の金属ケース32は夜十分に冷却され5℃程度にあり、使用者が20℃に暖房された調理室で調理を開始した場合には、この暖気がコイル上面冷却風路15aに導入され、20℃の暖気が5℃の金属ケース32に当てられることになる。本実施例では、このような外気による金属ケース32の急激な温度変化を防止するために、この金属ケース32を更にプラスチックの外側赤外線センサケース33で覆っている。これで金属ケース32に直接冷却風をあてずに風による温度急変を防止している。
【0084】
さて、トッププレート2は誘導加熱された調理鍋6から赤外線放射を吸収することおよび接触熱伝導とで加熱される。図14で実線に示すように、トッププレート2は0.2μm〜2.9μmの波長の光を80%以上透過し、3〜4.5μmの波長の光を30%程度透過し、4.5μmよりも長い波長、及び、0.2μmよりも短い波長の光をほとんど透過しない。
【0085】
放射エネルギーが物質表面に入射すると、その一部ρは反射され、一部αは吸収され、残りτは透過する。これらの量の間には、エネルギー保存則からρ+α+τ=1が成立する。トッププレート2上に調理鍋6が置かれた状態では、調理鍋6の赤外線放射エネルギーのトッププレート2での反射はほとんどゼロとみなせるため、トッププレート2では吸収率α+透過率τ=1が成立していると見てよい。キルヒホフの法則より吸収率α=放射率εであるため、トッププレート2は調理鍋6からの赤外線放射エネルギーのうち、0.2μm〜2.9μmの波長では80%以上透過し、残り20%を吸収しこれを放射する。また、3〜4.5μmの波長では30%程度透過し、残り70%を吸収しこれを放射する。4.5μmよりも長い波長、及び、0.2μmよりも短い波長ではほとんど透過せず、すべてを吸収してこれを放射する。熱伝導で加熱された分も同様である。波長4.5μm以上では熱伝導加温の赤外線エネルギーはほとんどトッププレート2表面から放射される。
【0086】
このため、サーモパイル25を使用して、トッププレート2上の調理鍋6の温度を検出する場合にはトッププレート2自身の加熱が放射する赤外線が問題となる。例えばサーモパイル25に付属するガラス凸レンズ48の透過波長が1〜15μmであれば、トッププレート2が放射する4.5μmよりも長い波長の赤外線によってサーモパイル25の出力が大きく影響を受け、トッププレート2上の調理鍋底の温度を正確に検出できないことになる。トッププレート2を透過する鍋の放射赤外線エネルギーは1μm〜2.9μmの約2μmの帯域、これに対しトッププレート2自身が放射する赤外線エネルギーは4.5μm〜15μmの約10μmの帯域であり、同じ温度であればサーモパイル出力のうち、調理鍋6の温度による分の5倍がトッププレート2の温度によることになる。
【0087】
本実施例では、上記を防止するためサーモパイル25で構成される鍋温度検出装置18の赤外線センサケース29に、赤外線を透過させるためのケース窓30を開け、このケース窓30にトッププレート2を構成する結晶化ガラスを薄く正方形に切り出したものを結晶化ガラス光学フィルタ31として嵌め込んである。そして、サーモパイル25に入射する赤外線の内トッププレート2が放射する分を除去する。トッププレートが放射する波長2.9μm以上の部分はトッププレート2と同じ透過特性を持つ結晶化ガラス光学フィルタ31の光学特性によってサーモパイル25への入射が阻止される。
【0088】
結晶化ガラス光学フィルタ31をトッププレート以外の材料で作成しても良いが、図14で実線に示すような急峻な特性を示す光学フィルタを作成するのは非常に困難で高価なものになる。
【0089】
また、結晶化ガラス光学フィルタ31は、その下に配置されるサーモパイル25や反射型フォトインタラプタ26等がトッププレート2の赤外線透過窓5から見えなくする効果をもたせている。前述したように(図14の破線で示すように)1μm以上の長波長側の光学特性はトッププレート2とほぼ同じだが、短波長側でトッププレートに比べて透過率小の領域が400nmほどあり、この部分の可視光がカットされるため目には赤黒く見え、下に配置される部品を見えなくしている。
【0090】
更に、サーモパイル25のガラス凸レンズ48として波長5μm以上を透過させない5μmショートパスフィルタを有するガラス(図14に薄線で示す)を用いている。これは周囲温度で暖められる結晶化ガラス光学フィルタ31自身および赤外線センサケース29が放射する赤外線をも波長5μm以上は透過させないようにするためである。というのは先に述べたように鍋から放射される1〜2.9μmの赤外線エネルギーはトッププレートで通過を制限されているため非常に微小であり、サーモパイル25の出力増幅を大きくせざるを得ないため周囲温度での5μm以上の赤外線放射に敏感であり、徹底的に鍋底以外からの4.5μm以上の赤外線がサーモパイルの赤外線吸収膜43に入射するのを防止する必要があるためである。
【0091】
なおこのガラス凸レンズ48をトッププレート2や結晶化ガラス光学フィルタ31と同じ結晶化ガラスで作成してもよい。こうすれば前述した理由で結晶化ガラス光学フィルタ31の温度による赤外線放射をよりよく遮断することができるので好適である。
【0092】
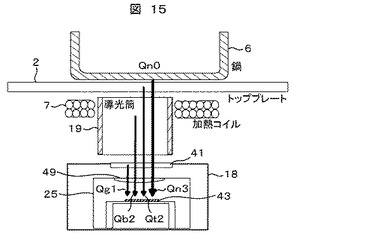
図15に本実施例(図3の構成)を模式的に、各部材の放射赤外線エネルギー、この赤外線エネルギーが通過する各部材(トッププレート2,結晶化ガラス光学フィルタ31,ガラス凸レンズ48)でフィルタリングされ、サーモパイル25の赤外線吸収膜43への入射エネルギーとなる観点でまとめた図を示す。
【0093】
調理鍋6を黒体としてある温度Tnでの赤外線放射エネルギーQn0はトッププレート2を透過する。このとき、Qn0はトッププレート2の透過特性でフィルタリングされ、結果的に減衰して視野筒19内に入射する。この入射赤外線エネルギーをQn1とする。そして、このQn1は鍋温度検出装置18の結晶化ガラス光学フィルタ31を透過する。このとき、Qn1は結晶化ガラス光学フィルタ31の透過特性で再びフィルタリングされ、結果的に更に減衰してQn2となる。次にサーモパイル25のガラス凸レンズ48を透過してサーモパイルの測温接点上の赤外線吸収膜43に入射する。このとき再びガラス凸レンズ48の透過特性で再びフィルタリングされ最終的にQn3となり赤外線吸収膜43に吸収され熱となる。
【0094】
さて、トッププレート2は調理鍋6からの熱伝導および放射熱で加熱される。そのため、トッププレート2も赤外線エネルギーを放射する。この赤外線放射エネルギーはトッププレート2の温度Ttと放射率から算出できる。放射率は1から図14に実線で示す透過率を引いた値である。このエネルギーをQt0とする。前述同様これは、結晶化ガラス光学フィルタ31を透過して減衰しQt1となり、次にガラス凸レンズ48を透過して減衰しQt2となり赤外線吸収膜43に吸収され熱となる。
【0095】
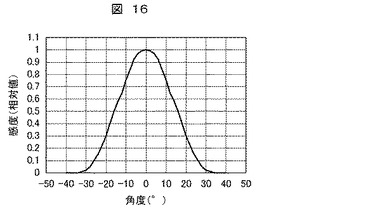
また、視野筒19内壁も、調理鍋6の放射熱および加熱コイル7からの熱伝導で加熱される。このため、視野筒19内壁も赤外線エネルギーを放射する。この赤外線放射エネルギーは、サーモパイル25の視野特性および視野筒19の寸法(内径,長さ)により一部分がサーモパイル25に入射することになる。図16に実施例で使用したサーモパイル25の視野特性を示す。視野特性が非常に狭ければ、このセンサ視野筒からの赤外線放射はサーモパイル25に入射しないが、一般には狭い視野特性を小型安価なサーモパイルで作ることは困難であり、実施例のようにサーモパイルと視野筒の距離が短い場合は視野筒からの赤外線放射がサーモパイルに入射することになる。このサーモパイルに入射する赤外線放射エネルギーQb0は視野筒19の温度Tbと放射率(約0.7)およびサーモパイルの視野特性から算出できる。前述同様これは、結晶化ガラス光学フィルタ31を透過して減衰しQb1となり、次にガラス凸レンズ48を透過して減衰しQb2となり、赤外線吸収膜43に吸収され熱となる。
【0096】
また、結晶化ガラス光学フィルタ31も調理鍋6からの放射熱および鍋温度検出装置18の設置されるコイル上面冷却風路15aの雰囲気温度で加熱される。このため、結晶化ガラス光学フィルタ31も赤外線エネルギーを放射する。この放射エネルギーQg0は、トッププレート2と同様にその温度Tgと放射率から算出できる。放射率は1から図14に破線で示す透過率を引いた値である。前述同様これは、ガラス凸レンズ48を透過して減衰しQg1となり赤外線吸収膜43に吸収され熱となる。
【0097】
以上述べたように、調理中にサーモパイル25の検出する赤外線エネルギーは、1)調理鍋からのQn3の他に、2)トッププレート2からのQt2、3)視野筒19内壁からのQb2、4)結晶化ガラス光学フィルタ31からのQg1が重畳されたものであり、サーモパイル25はこの赤外線エネルギーに比例した電圧を生じる。そして、正確に鍋温度を検出するためには2),3),4)の赤外線エネルギーによる電圧を減算する必要がある。
【0098】
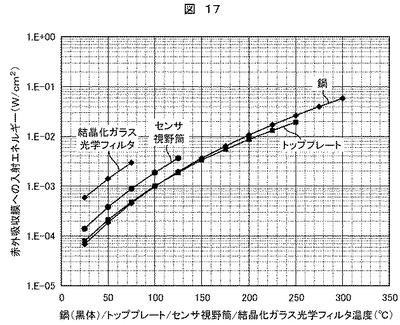
図17に本実施例における、各部の温度と各部が放射しサーモパイル25の赤外線吸収膜43に入射する赤外線エネルギー(図15に示すQn3,Qt2,Qb2,Qg1)(計算結果)の関係をまとめて示す。これは図13の分光放射エネルギーと各部材の透過特性(図14に示す)を用いて計算したものである。各部の温度は調理中に到達する温度範囲のみ図示している。
【0099】
調理中の各部材の代表的温度、例えば300℃の鍋(黒体)からの入射エネルギーを1とすると、200℃のトッププレートからのそれは1/6、80℃のセンサ視野筒からのそれは1/60、40℃の結晶化ガラス光学フィルタ31からのそれは1/60となる。鍋の放射率が例えば0.25となれば、前述鍋からの入射エネルギー1は1/4となり、他の部材からの入射エネルギーとあまりかわらなくなる。つまり、鍋温度検出に対する外乱として無視できなくなることがわかる。
【0100】
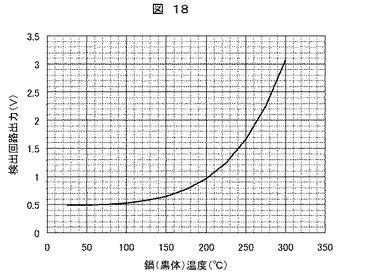
図18に鍋底として黒体を図3の実施例の赤外線透過窓5に置いた場合の、黒体温度Tnとサーモパイル温度検出回路72の出力端子72−2の出力電圧Vの関係を示す。黒体はトッププレートが加熱されない程度の短時間戴置した場合であり、視野筒19,結晶化ガラス光学フィルタ31の温度上昇もない。つまり、これは図15のQn3を電圧に変換したものである。
【0101】
常温から100℃まではほぼ0.5Vであり、100℃を越えると温度に比例した電圧が出力される。0.5Vはサーモパイル温度検出回路72の電源電圧(5V)を抵抗72−5,72−6,72−7で分圧した電圧(図10中a点で示す)0.5Vがオペアンプ72−1のバイアス電圧として与えてあるためである。100℃を越えるとサーモパイル25の出力電圧が大きくなり、オペアンプ72−1で約2000倍に増幅されて0.5V以上の電圧として観測される。このバイアス電圧はサーモパイル温度検出回路72の故障検出用に与えてある。出力端子72−2の出力電圧値からこの0.5Vを引いた値(0.5Vからの電圧上昇値)が検出した鍋底面温度に比例したものである。マイクロコンピュータ60はサーモパイル温度検出回路72の出力端子72−2の出力電圧をAD変換して読み込むが、この電圧から0.5Vを引いた値である鍋温度検出電圧Vt(=V−0.5)をもとに後述処理を行い鍋温度を得る。図18の関係は予めマイクロコンピュータ60のROMにテーブルデータTBLnとして記憶しておく。
【0102】
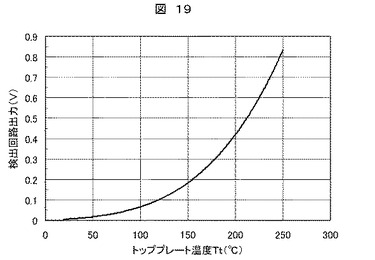
図19にトッププレート2のみを加熱したときのトッププレート温度Ttとサーモパイル温度検出回路72の出力端子72−2の出力電圧Vの関係を示す。但し前述の0.5Vを引いた値で示してある。鍋が置かれていないトッププレート2の赤外線透過窓5近傍を熱風で加熱した時のトッププレート温度Ttとサーモパイル温度検出回路72出力端子72−2の出力電圧の関係を示す。このとき、視野筒19,結晶化ガラス光学フィルタ31が加熱されないようにする。つまり、これは図15のQt2を電圧に変換したものである。図19の関係は予めマイクロコンピュータ60のROMにテーブルデータTBLtとして記憶しておく。
【0103】
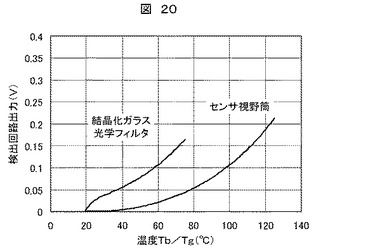
図20に実施例のトッププレート2を取り外し、視野筒19に別途ヒータを巻きつけて独立に加熱した時のセンサ視野筒温度Tbとサーモパイル温度検出回路72出力端子72−2の出力電圧Vの関係を示す。(図では前述0.5Vを減算した値を示している。)このとき、結晶化ガラス光学フィルタ31が加熱されないようにする。つまり、これは図15のQb2を電圧に変換したものである。
【0104】
同様に鍋温度検出装置18を取り出し、ドライヤー等で結晶化ガラス光学フィルタ31を短時間加熱し、サーモパイル25等が加熱されないようにあるいはサーモパイル25の温度が変動しないときの結晶化ガラス光学フィルタ31の温度Tgとサーモパイル温度検出回路72の出力端子72−2の出力電圧Vの関係を示す。(図では前述0.5Vを減算した値を示している。)つまり、これは図15のQg1を電圧に変換したものである。この図20に示す二つの関係も予めマイクロコンピュータ60のROMにテーブルデータTBLbおよびTBLgとして記憶しておく。
【0105】
鍋温度検出装置18に内蔵される反射型フォトインタラプタ26を図6に示すように配置するとトッププレート2上に調理鍋がない場合、赤外線LED50の放射した赤外光(波長930nm)は大部分が結晶化ガラス光学フィルタ31およびトッププレート2を透過し赤外線フォトトランジスタ51には戻ってこない。しかし、一部は結晶化ガラス光学フィルタ31およびトッププレート2で反射される。これは結晶化ガラス光学フィルタ31およびトッププレート2の透過率が波長930nmで85%および90%であり、残り15%および10%の赤外光は反射されるためである。特に結晶化ガラス光学フィルタ31で反射される分はすぐ横にある赤外線フォトトランジスタ51に直接戻るため、本実施例では図6に示すように、反射型フォトインタラプタ26前面を結晶化ガラス光学フィルタ31下面に接するように配置してこの反射光が赤外線フォトトランジスタ51に入射するのを防止している。また、赤外線LEDの放射角度のため、トッププレート下面に到達せず経路途中にある物体(視野筒19内面)で反射される赤外光もある。
【0106】
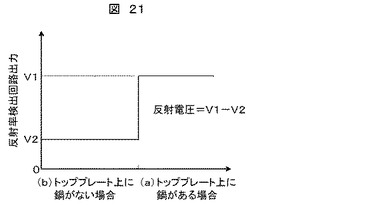
このため、図21に示すように反射率検出回路73の出力は、トッププレート上に鍋がある場合(a)V1となり、鍋がない場合(b)V2となる。正味の鍋での反射電圧VrはVr=V2−V1となる。
【0107】
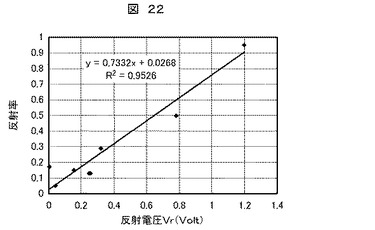
鍋温度検出装置18を図3に示すように配置し、それに内蔵する反射率検出回路73を用いて、トッププレート上に反射率が既知の金属板を配置したときの反射率検出回路73の出力から得られる先の反射電圧Vrと反射率の関係を図22に示す。図中に近似線も示す。この関係を用いれば、反射率検出回路73の出力電圧から反射率が得られる。そして、この関係をテーブルデータにあるいは近似式の係数値をあらかじめマイクロコンピュータ60のROMに記憶しておく。
【0108】
調理鍋のような金属物質ではキルヒホフの法則により温度Tの物質表面から放射される赤外線エネルギー(E=εσT4)の放射率εと表面の反射率ρの間にはε+ρ=1の関係が成立する(透過率α=0とする)。調理鍋では放射率の違いにより同じ鍋底温度でありながら、放射される赤外線エネルギーが異なる。このため、サーモパイル出力すなわち鍋温度検出装置18の出力が異なるという問題が生じる。そこで調理鍋底の反射率を検出して放射率を求め鍋温度検出装置18の出力を補正してから温度に換算する必要がある。これを行うために先に説明した反射率に相当する量である反射電圧Vrを求め、これから反射率を得るのが反射率検出回路73である。この反射率を1から引いて放射率を得る。
【0109】
図23にトッププレート2に置かれた数種の鍋について、鍋温度検出装置18の出力(サーモパイル温度検出回路72の出力V)から前述した0.5Vのオフセット電圧Voを引いた値Vt(鍋温度検出電圧)と鍋底面温度Tとの関係の一例を示す。図中に各鍋底面の放射率も示す。図23に示すように放射率によって鍋温度検出装置18の出力と鍋底温度の関係が異なることがわかる。図23の(a)で示す鍋は放射率が0.9と黒体に近い。(b)は放射率が0.57、(c)は0.43、(d)は0.24である。(b),(c),(d)の電圧値を放射率で除算すると、図中に破線でしめすものとなり、ほぼ1本の曲線に集約することができることが分かる。各出力Vtは各鍋の全放射エネルギー(E′=εσT4)に比例し、これを放射率で除算するのは、前述したように黒体の全放射エネルギー(E=σT4)に換算することを意味する。そして、各鍋の放射率が分かれば、各鍋の鍋温度を黒体の放射温度に還元できることを意味している。
【0110】
図24に、各鍋において放射温度計を用いて計測した放射率と図3で反射率検出回路73を用いて得た反射率(図22の関係の近似式を適用)の関係を示す。鍋によってキルヒホフの法則からはずれるものもあるが、放射率と反射率の間には強い相関がある。キルヒホフの法則から外れるのは反射率の検出において、鍋表面での散乱により反射赤外線の全てを受光していないためである。反射率を求める際には、赤外線LED50の放射光がトッププレート2になるべく垂直に入射させ、鍋での反射光をなるべく垂直に赤外線フォトトランジスタ51に導くのが望ましい。本実施例では鍋温度検出装置18内のサーモパイル25のトッププレート2上位置での視野面とこの反射率検出発光のトッププレート2上での反射面は同一面である。このため、図6に示すように鍋温度検出装置18内にサーモパイル25と反射型フォトインタラプタ26を並べて配置している。
【0111】
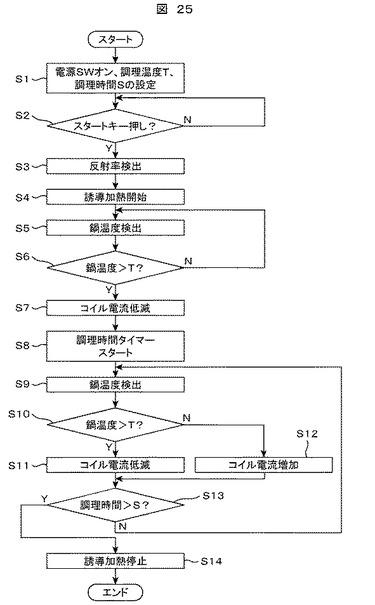
以下では、本実施例の動作について、手前右側の円表示4に調理鍋6を置き、所定温度で所定時間調理鍋を加熱して調理を行う場合として説明する。図25にこの動作のフローチャートを示す。図示していない電源を投入し、調理鍋6を置いた誘導加熱口の操作スイッチで所定の温度および調理時間を設定し(ステップS1)調理開始を指示すると(ステップS2)、マイクロコンピュータ60はまず反射率検出回路73を制御して載置された鍋の反射データ(反射率に相当)を取り込み反射率を検出する(ステップS3)。同時に加熱コイル7およびインバータ回路8等を冷却するため、図示しないファンを駆動してコイル上面冷却風路15a,コイル下面冷却風路15bおよび16a,16bに外気を導入する。
【0112】
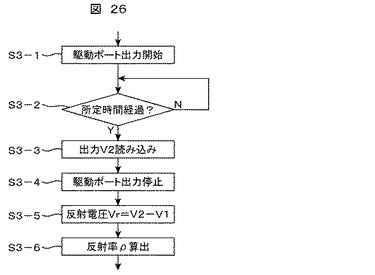
反射率を検出するステップS3を図26に示すフローチャートを用いて詳細に説明する。マイクロコンピュータ60は反射率検出回路73の端子73−2にポートから図12(a)の赤外線LED駆動信号を出力する(ステップS3−1)。所定時間例えば200ms出力した後(ステップS3−2)、端子73−8に出力される電圧V2をAD端子より読み込む(ステップS3−3)。そして、赤外線LED駆動信号を停止する(ステップS3−4)。次に予め記憶されている鍋が置かれていない時の電圧V1を先に読み込んだ電圧V2から引き反射電圧Vrを算出する(ステップS3−5)。そして、予め記憶されている反射電圧と反射率の関係から反射率ρを得る(ステップS3−6)。
【0113】
ステップS3に続いて、電力制御回路62,周波数制御回路61,インバータ回路8を制御して加熱コイル7に電力を供給し誘導加熱を開始する(ステップS4)。加熱コイル7に電力が供給されると、加熱コイル7から誘導磁界が発せられ、トッププレート2上の調理鍋6が誘導加熱される。この誘導加熱によって調理鍋6の温度が上昇し、調理鍋6内の被加熱物の調理が開始される。マイクロコンピュータ60は誘導加熱を開始すると、一定時毎に鍋温度検出装置18の出力を読み込み、鍋温度を検出する(ステップS5)。
【0114】
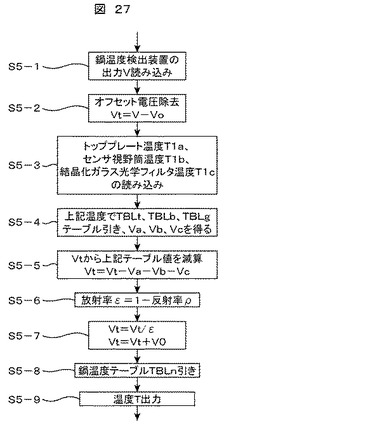
ここで、鍋温度検出動作(ステップS5)を詳細に説明する。図27に鍋温度検出のフローチャートを示す。マイクロコンピュータ60は鍋温度検出装置18(サーモパイル温度検出回路72)の出力電圧Vを読み込み(ステップS5−1)、この値から0.5Vを引きこれを鍋温度検出電圧Vtとする(ステップS5−2)。
【0115】
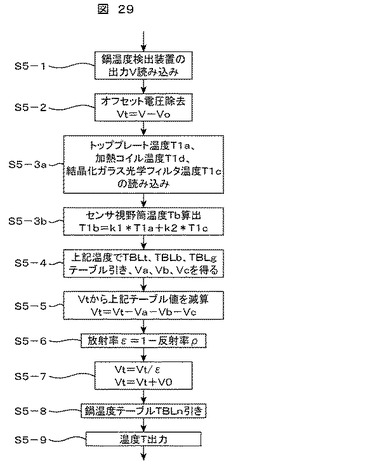
同時にサーミスタ20a,20b,20cとサーミスタ温度算出回路74からトッププレート2,視野筒19,結晶化ガラス光学フィルタ31の温度T1a,T1b,T1cを読み込む(ステップS5−3)。そして、予めテーブルTBLtとして記憶してあるトッププレート温度Ttとサーモパイル温度検出回路72の出力の関係から、トッププレート2の温度T1aでの赤外線量電圧Vaを得る。同様にテーブルTBLbから視野筒19の温度T1bでの赤外線量電圧Vb,テーブルTBLgから結晶化ガラス光学フィルタ31の温度T1cでの赤外線量電圧Vcを得る(ステップS5−4)。(赤外線量算出手段の動作)続いて先の鍋温度検出電圧Vtから前記Va,Vb,Vcを減算する(ステップS5−5)。(減算手段の動作)この処理により外乱としてのトッププレート2,視野筒19,結晶化ガラス光学フィルタ31からの赤外線量を除去する。この減算後の電圧をVtとする。
【0116】
そして、誘導加熱直前に検出した反射率から、放射率(=1−反射率)を得て(ステップS5−6)、この減算後の鍋温度検出電圧Vtを除算する(ステップS5−7)(反射率補正の動作)。除算後のVtに前述V0=0.5Vを加算し、予めTBLnとして記憶してあるVnとTnの関係であるデータテーブルを引いて(ステップS5−8)、鍋温度に変換し鍋温度Tnを出力する(ステップS5−9)。
【0117】
なお、放射率を算出する過程(ステップS5−6)と鍋温度検出電圧Vtを放射率で除算する過程(ステップS5−7)の代わりに、予め倍率a=1/放射率(a=1/ε)の値(1以上の値になる)と反射率(あるいは反射電圧Vr)の関係をテーブルとして記憶し、反射率(あるいは反射電圧Vr)から前記テーブルで倍率aを得て、Vtに倍率を乗算したのち、VnとTnの関係であるデータテーブルTBLnを引いて鍋温度を出力してもよい。こうすれば、マイクロコンピュータの処理時間を要する除算を使用しなくてすみ処理の高速化が図れる。
【0118】
ステップS5で検出した温度が所定の温度に到達したら(ステップS6)、電力制御回路62を制御して加熱コイル7に供給する電流を所定量減少させる(ステップS7)。そして、調理時間タイマーをスタートさせる(ステップS8)。一定時毎の鍋温度検出(ステップS9)を続けながら(ステップS10)、加熱コイル7に供給する電流を所定量減増減させて(ステップS11,S12)、鍋温度を一定(Tc)に保つ。そして、所定の調理時間が経過したら(ステップS13)、調理終了をブザーで使用者に報知して、加熱コイル7への電力投入を停止する(ステップS14)。こうして、調理鍋6の被調理物は設定された温度および時間で調理される。
【0119】
以上の説明では反射率検出を誘導加熱直前に1度だけ行う例を示したがこれに限ることはない。通常の鍋では誘導加熱中(温度が高温になっても)反射率は変化しない。また、赤外線発光LEDでは長時間連続発光において寿命の問題がある。本説明ではこれらの点を考慮して1調理につき誘導加熱直前の1回の反射率検出に限定した。当然、発光電流を低減して調理中に一定周期で反射率検出を行っても良い。特に薄手の鍋では高温による鍋底変形で反射率が変化することもある。さらに、色塗装を底面に施した鍋では、高温で塗装が変性し反射率が変化することもある。この場合には加熱中でも定期的に反射率検出を行うのが望ましい。この場合当然磁場の影響を避けるために、実施例のように非磁性金属体で反射型フォトインタラプタ26および反射率検出回路73を囲うのが望ましい。
【0120】
また、調理中に鍋を別の鍋に交換する場合もある。この時反射率は当然変化する。この場合には今ある鍋を退かした時点で鍋温度検出装置18の検出する電圧が急激に低下する。そして、別温度の鍋を置いた時点で鍋温度検出装置18の検出する電圧はこの鍋底面温度に対応する値に復帰する。この変化を捉え再度反射率を検出するのが望ましい。
【0121】
なお、図20に示すように結晶化ガラス光学フィルタ31の温度が30℃よりも低い場合にはこれがサーモパイル25に与える赤外線量は鍋のそれに比べ一桁少ない。このため、鍋温度検出装置18が調理中十分に冷却できれば(鍋温度検出装置18の周囲温度を冷却風で30℃以下に維持できれば)前述のTBLgの省略およびステップS5−4,S5−5でのVcの算出,減算処理の省略ができることは明らかである。もちろんこの場合には、サーミスタ20cも省くことができる。
【実施例2】
【0122】
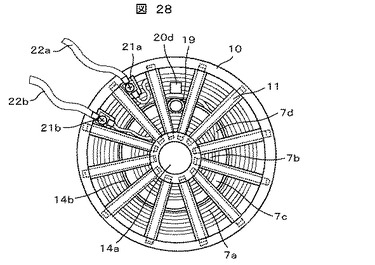
実施例1の図5では、視野筒19の温度を導光筒に設けたサーミスタ20bで検出した。図28にコイルベース10の裏面を示す。この実施例2では、加熱コイル7の裏面に設けたサーミスタ20dとトッププレート2下面に設けたサーミスタ20aで視野筒19の温度を検出する。前述したように視野筒19は誘導加熱された鍋からの放射熱と加熱コイル7のジュール発熱の伝熱で加熱される。このため、前記放射熱をトッププレート2の温度から推定し、伝熱を加熱コイル7の温度から推定する。そして、視野筒19の温度をサーミスタ20dとサーミスタ20aの荷重線形和として算出する。例えば、サーミスタ20aで検出する温度をT1aとし、サーミスタ20dで検出する温度をT1cとすればセンサ視野筒の温度T1bは、
T1b=k1×T1a+k2×T1c(k1,k2は定数) …(式1)
で表される。
【0123】
図28において、図5と同一符号は同一物を示す。本実施例の制御ブロック図は図9の制御ブロックにおけるサーミスタ20bをサーミスタ20dに置き換えたものとなるため省略する。
【0124】
この場合の鍋温度検出の処理を図29のフローチャートに示す。図29において図27の処理と同一符号は同一処理を示す。
【0125】
実施例2でのその他の動作は前述した実施例1と同様であるので説明を省略する。
【0126】
以上説明した誘導加熱調理器によれば、調理温度150から300℃の広い温度範囲において、鍋の材質,鍋底の形状,汚れの強弱によらず調理鍋6の加熱最高温度を正確に安定して検出でき、適切に加熱コイルへの高周波電力を制御することで最適な調理が可能となる。
【符号の説明】
【0127】
1 誘導加熱調理器の本体
2 トッププレート
3 操作表示部
4 調理鍋を置く位置を示す円表示
5 赤外線透過窓
6 調理鍋
7 加熱コイル
7a 第1のコイル
7b 第2のコイル
7c コイル間隙
7d 架橋線
8 インバータ回路
10 コイルベース
11 フェライト
14a 内空洞
14b 外空洞壁
15 コイル冷却風路
15a コイル上面冷却風路
15b コイル下面冷却風路
15c コイル上面冷却風送出孔
16 シール材
18 鍋温度検出装置
19 視野筒
20a サーミスタ(第1の温度検出手段)
20b サーミスタ(第2の温度検出手段)
20c サーミスタ(第3の温度検出手段)
21a 低電圧端子
21b 高電圧端子
25 サーモパイル
26 反射型フォトインタラプタ
27 電子回路基板
29 赤外線センサケース
30 ケース窓
31 結晶化ガラス光学フィルタ
32 金属ケース
33 外側赤外線センサケース
35 金属キャン
36 金属ステム
38 シリコン基材
39 シリコン酸化膜
40 ポリシリコン蒸着膜
41 アルミ蒸着膜
42 測温接点部
43 赤外線吸収膜
44 冷接点部
45 NTCサーミスタ
46 金属ピン
47 窓
48 ガラス凸レンズ
49 結晶化ガラス凸レンズ
50 赤外線LED
51 赤外線フォトトランジスタ
55 ヒートシンク
60 マイクロコンピュータ
61 周波数制御回路
62 電力制御回路
63 整流回路
64 電源スイッチ
68 操作スイッチ
69 表示回路
70 ブザー
72 サーモパイル温度検出回路
72−1,73−6 オペアンプ
72−9 抵抗
73 反射率検出回路
73−5 コンデンサ
73−7 充放電回路
【技術分野】
【0001】
本発明は、鍋温度検出手段としてサーモパイルを備えた誘導加熱調理器に関する。
【背景技術】
【0002】
誘導加熱調理器は、結晶化ガラス等で構成されるトッププレート下に同心円状の誘導加熱コイル(以下「加熱コイル」と略称)を設置し、これに高周波電流を流し、発生する磁界でトッププレート上に戴置された調理容器である鍋底にうず電流を誘起し、このジュール熱で調理容器である鍋を直接加熱するものである。
【0003】
誘導加熱調理器の鍋温度検出手段として、現在では応答速度が良好な点で加熱された鍋底から放射される赤外線をトッププレート越しに赤外線センサで観測し温度を検出するものが多く使われている。この赤外線センサは加熱コイル中心空隙付近の下に配置されて、鍋底から放射される赤外線をトッププレート越しに赤外線センサで検出し、その出力に応じて加熱コイルを駆動するインバータ回路出力を制御して調理温度を調整するものである。
【0004】
しかし、調理温度(100から300℃)ではその放射赤外線エネルギーは少なく、さらに、トッププレートの光学特性から、トッププレートを通過する波長は1μmから3μmの幅2μm程度しかなく鍋の放射赤外線エネルギーの1〜2%しかない。このため、使用する赤外線センサの感度は体温計等に用いられるそれの2桁高い感度が求められる。
【0005】
さらに、加熱中ではトッププレート自身も鍋底からの伝熱あるいは放射で加熱され、この放射赤外線エネルギーは鍋の放射赤外線エネルギーと同等の量になる。つまり、鍋とトッププレートとの双方からの放射赤外線エネルギーが赤外線センサに入射することになり、調理中のトッププレート自身の温度上昇が鍋温度を検出する赤外線センサの検出外乱となり検出温度に誤差が生じることになる。この課題を解決する手段として特許文献1,2,3に挙げるものがある。
【0006】
特許文献1の技術は、トッププレートに設けられ、鍋の底面から放射される赤外線をトッププレートの下に透過させる第1の測定エリアと、トッププレートに設けられ、鍋の底面から放射される赤外線を遮断する第2の測定エリアと、トッププレート下方に設けられ、第1の測定エリアからの赤外線量及び第2の測定エリアからの赤外線量を検出するアレイ状の赤外線検出部とを備え、一つのアレイが検出する第1の測定エリアからの赤外線量から他の一つのアレイが検出する第2の測定エリアからの赤外線量を減算し(差動増幅し)、この出力で鍋温度を検出するものである。つまり、第1の測定エリアからは、鍋底からの赤外線放射とトッププレートからのそれが加算されたものであり、第2の測定エリアからはトッププレート自身が放射する赤外線のみであり、第1のものから第2のものを減算することでトッププレートの温度に影響されない鍋温度の検出技術となっている。
【0007】
特許文献2の技術は、特許文献1と同様の考えであり赤外線検出部を安価な2組の感熱素子(サーミスタ等)で構成される第1の赤外線検知用感熱素子及び第2の赤外線補償用感熱素子とし、各第1及び第2の感熱素子に開口部からの赤外線を導く第1及び第2の導光部が形成される保持体をもつ。そして、第2の導光部が形成される保持体の入射開口部に赤外線遮光膜あるいは遮光材(断熱性弾性体を含む)を配置する。第1の赤外線検知用感熱素子出力と第2の赤外線補償用感熱素子出力を差動増幅することで鍋底の温度を正確に検出するものである。つまり、第1の導光部が形成される保持体下の第1の赤外線検知用感熱素子には、トッププレートを透過した鍋底からの赤外線とトッププレート自身の放射する赤外線が入射され、第2の導光部が形成される保持体下の第2の赤外線補償用検知用感熱素子には、遮光材がトッププレート下面に押し付けられているため概略トッププレート下面の温度になり、トッププレート自身が放射する赤外線に比例する赤外線が入射することになる。そして、第1の赤外線検知用感熱素子出力から第2の赤外線補償用感熱素子出力を減算(差動増幅)することで鍋底の温度を正確に検出する。
【0008】
特許文献3の技術は、特許文献1,2と同様の考えであり、天板(トッププレート)下面に配置される赤外線検出手段と、この赤外線検出手段出力から鍋底温度を検出する第1の温度検出手段と、天板下面に配置され天板の温度を検出する第2の温度検出手段(サーミスタ)と、赤外線検出手段の出力を第2の温度検出手段の出力に応じて減算する減算手段と備え、この減算手段の出力で検出した鍋温度を補正して、加熱コイルへの加熱出力を制御するものである。つまり、鍋底からの赤外線放射と天板からのそれが重畳された赤外線出力から第1の温度検出手段が出力する鍋温度と天板温度が加算されたものを、第2の温度検出手段から天板自身が放射する赤外線が赤外線検出手段に出力する天板温度を減算することで天板の温度に影響されない鍋温度の検出技術になっている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−111055号公報
【特許文献2】特開2004−63451号公報
【特許文献3】特開2006−40778号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1の鍋温度検出手段は、少なくとも2つのアレイを持つ赤外線検出部が必要となるため、高価にならざるを得ない。また、第2の測定エリアはトッププレート下面に赤外線を遮断する高価な黒体塗料を塗布して作成している。また、この黒体の放射率はトッププレート自身の放射率とは異なる。そのため、トッププレートと同じ温度にある黒体の赤外線量はトッププレート自身の赤外線量とは異なる。したがって第1の測定エリアからの赤外線量を検出する赤外線検出手段の出力から第2の測定エリアからの赤外線を検出する赤外線検出手段の出力を減算してもトッププレートの温度に影響されない正確な鍋温度の検出はできない。
【0011】
特許文献2の鍋温度検出手段は、赤外線検出に感熱素子(サーミスタ)を用いている。周知のようにサーミスタは温度によりその抵抗値が非線形に変化する。そして、第1の赤外線検知用感熱素子の検出温度(鍋)と第2の赤外線補償用感熱素子の検出温度(トッププレート)は大きく異なるため、素子の抵抗値は大きく非線形に異なることになる。したがって夫々の素子のこの抵抗変化出力に線形な減算を行っても、トッププレートの温度に影響されない正確な鍋温度の検出はできない。
【0012】
特許文献3の鍋温度検出手段は、第2の温度検出手段で天板(トッププレート)温度を検出し、これから天板自身が放射する赤外線が赤外線検出手段に出力する値を推定し、これを第1の温度検出手段の出力から減算することで天板の温度に影響されない正確な鍋温度が検出すると述べられているが、具体的な推定手段(方法)については言及されていない。更に後述するが、第1の温度検出手段の出力には天板からの赤外線量の他に、赤外線検出手段に赤外線を導光する導光筒あるいは検出手段周囲の構造物からの赤外線量も含まれる。これらを排除あるいは減算しなければ正確な鍋温度の検出はできない。
【0013】
赤外線センサで温度検出する場合の他の課題は、被測定物の放射率の影響を受けることである。鍋底の赤外線放射率は、鍋底の材質,色,加工状態(鍋底の塗装や鍋底の刻印,ヘアライン加工,リング加工,打ち込み加工等)に大きく依存する。また、同じ鍋であっても鍋底に付着した調理油等の汚れによって放射率が異なってくる。すなわち、同じ温度,同じ材質の鍋底であっても、色,加工あるいは汚れ状態が異なると放射する赤外線エネルギーが異なるため赤外線センサで受光する赤外線エネルギーも異なり、異なる温度が検出されることになる。このため、鍋底の相違により赤外線による温度検出が異なるのを補正する手段が必要になる。上記特許文献1,2,3には正確な鍋底温度検出に必要な放射率検出について言及されていない。
【0014】
本発明は赤外線センサとしてサーモパイルを用いた鍋温度検出手段において、トッププレート上に置かれる鍋の鍋底温度を、トッププレートおよび鍋底からの赤外線を赤外線センサに導く加熱コイルに設けた導光筒の温度あるいは赤外線センサの前面に配置される部材の温度に影響されずに、安定して精度良く検出することを可能にし、安全性,使い勝手の向上した誘導加熱調理器を提供することを目的とする。
【0015】
更に鍋底の材質,色,加工状態に拘らず正確に鍋底温度を検出する誘導加熱調理器を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記課題は、調理容器である鍋を上面に置く結晶化ガラスからなるトッププレートと、トッププレートの下に設けられ前記鍋を加熱するために誘導磁界を発生させる加熱コイルと、加熱コイルの下に設けられ、前記鍋底などから放射される赤外線を検出するサーモパイルからなる赤外線検出手段と、前記加熱コイルの支持部に設けられ、前記加熱コイルから放射される赤外線を遮断し、前記鍋底から放射される赤外線を前記赤外線検出手段に導く導光筒と、前記トッププレートの下面に配置されこの温度を検出する第1の温度検出手段と、前記導光筒に配置されこの温度を検出する第2の温度検出手段と、前記第1の温度検出手段の出力に基づき前記トッププレートから放射される赤外線量を算出する第1の赤外線量算出手段と、前記第2の温度検出手段の出力に基づき前記導光筒から放射される赤外線量を算出する第2の赤外線量算出手段と、前記赤外線検出手段の出力から、前記第1及び第2の赤外線量算出手段の出力を減算する減算手段と、前記加熱コイルへ高周波電力を供給する高周波電力供給手段と、高周波電力供給手段の出力電力を制御する電力制御手段と、前記減算手段の出力より前記調理容器の底面の温度を検出する鍋温度検出手段とを備える誘導加熱調理器によって解決できる。
【0017】
また、上記に加え、前記赤外線検出手段前面に前記トッププレートと同一光学特性を有する窓材を設け、窓材にこの温度を検出する第3の温度検出手段と、前記第3の温度検出手段の出力に基づき前記窓材から放射される赤外線量を算出する第3の赤外線量算出手段と、前記赤外線検出手段の出力から、前記第1及び第2及び第3の赤外線量算出手段の出力を減算する減算手段とを備える誘導加熱調理器によって解決できる。
【0018】
更に上記に加え、前記赤外線検出手段の近傍に配置される赤外線発光および受光素子と、前記赤外線発光素子が鍋底面に一定量の赤外線を投光し、この反射光を前記赤外線受光素子で受光し、この反射光の量から鍋底の放射率を計測する放射率計測手段とを備え、前記減算手段の出力を放射率計測手段の出力に基づき補正する補正手段とを備える誘導加熱調理器によって解決できる。
【発明の効果】
【0019】
本発明によれば、サーモパイル赤外線センサを用いて、調理時の周囲温度つまり、トッププレートおよび導光筒および赤外線センサ前面に配置する部材の温度によらず安定して加熱鍋底の温度を正確に検出する鍋温度検出手段を提供することができる。そして、正確に検出した高温部温度により適切に加熱コイルへの高周波電力を制御することで安全かつ最適な調理を可能にする誘導加熱調理器を提供できる。
【0020】
さらに、鍋底温度を検出するサーモパイル赤外線センサの近傍に赤外線発光および受光素子を配置して温度検出と同一視野で鍋底の放射率を計測し、赤外線センサの出力を補正することで鍋底の材質,色,加工状態あるいは汚れの状態に拘らず正確に鍋底温度を検出することが可能になり、正確に検出した鍋底温度を用いて加熱の制御を行うことができるので、上手に調理をすることが可能となる。
【図面の簡単な説明】
【0021】
【図1】実施例1の誘導加熱調理器の構成を示す斜視図。
【図2】実施例1の誘導加熱調理器の構成を示す断面図。
【図3】実施例1の加熱コイル周辺の詳細を示す断面図。
【図4】実施例1の加熱コイルおよび鍋温度検出装置の配置を示す平面図。
【図5】実施例1の加熱コイルの裏面を示す平面図。
【図6】実施例1の鍋温度検出装置の平面および断面図。
【図7】実施例1の反射型フォトインタラプタを示す図。
【図8】実施例1のサーモパイルの詳細を示す平面および断面図。
【図9】実施例1の誘導加熱調理器の制御ブロック図。
【図10】実施例1のサーモパイル温度検出回路の詳細を示す図。
【図11】実施例1の反射率検出回路の詳細を示す図。
【図12】実施例1の反射率検出回路の動作タイミングチャート。
【図13】プランクの分布則による分光放射エネルギーを示す図。
【図14】本実施例で使用するトッププレートなどガラスの光学特性を示す図。
【図15】実施例1の各部材とその放射赤外線エネルギーを示す模式図。
【図16】実施例1のサーモパイルの視野特性。
【図17】実施例1の各部温度と赤外線吸収膜への入射赤外線エネルギーの関係を示す図。
【図18】実施例1の黒体(鍋底)温度とサーモパイル温度検出回路出力の関係を示す図。
【図19】実施例1のトッププレート温度とサーモパイル温度検出回路出力の関係を示す図。
【図20】実施例1のセンサ視野筒および結晶化ガラス光学フィルタ温度とサーモパイル温度検出回路出力の関係を示す図。
【図21】実施例1の反射率検出回路の鍋有無による出力説明図。
【図22】実施例1の反射率検出回路の反射電圧と反射率の関係を示す図。
【図23】実施例1の各種鍋の鍋底温度と鍋温度検出回路出力の関係を示す図。
【図24】実施例1の各種鍋放射率と反射率の関係を示す図。
【図25】実施例1の誘導加熱調理のフローチャート。
【図26】実施例1の反射率検出のフローチャート。
【図27】実施例1の鍋温度検出のフローチャート。
【図28】実施例2の加熱コイルを示す平面図。
【図29】実施例2の鍋温度検出のフローチャート。
【発明を実施するための形態】
【0022】
本発明の実施例を図面に基づいて説明する。
【実施例1】
【0023】
図1は実施例1の誘導加熱調理器の本体1の斜視図であり、図2は図1中に一点鎖線AA′で示される部分に調理鍋6を載せたときの概略縦断面図である。以下では、誘導加熱が可能な鍋置き場所が2口、ラジエントヒータやハロゲンヒータ等のヒータ(加熱源)の放射熱で加熱可能な鍋置き場所が1口ある3口の誘導加熱調理器を例に挙げ説明を行うが、本発明の適用対象はこれに限られず例えば誘導加熱が可能な鍋置き場所を3口設けた誘導加熱調理器であっても良い。なお、調理鍋6は、誘導加熱に適した磁性体の鉄鍋であっても良いし、非磁性体のアルミ鍋,銅鍋であっても良い。
【0024】
図1および図2に示すように、本体1の上面には、結晶化ガラス等の非磁性体によって形成されたトッププレート2が装着されている。また、トッププレート2の手前には、各口の加熱開始あるいは加熱コースを指示するスイッチ,各口の加熱状態(温度等)を表示する表示器が配置される操作表示部3が装着されている。
【0025】
トッププレート2の上面には、その下に配置される加熱コイル7あるいはラジエントヒータの最外半径におよそ一致する半径の円表示4が加熱可能な鍋置き場所を示すために印刷されている。また、トッププレート2は普通可視光に対して透明であるため、上面にはフリットガラスに耐熱塗料を混入した耐熱耐久性の衣装印刷、下面には耐熱面塗装を施し、機器内部が見えないようにしてある。誘導加熱が可能な鍋置き場所2口の円表示4の中央から約50mmずれた位置に後述する鍋温度検出のために印刷,塗装を行っていない赤外線透過窓5が設けられている。この赤外線透過窓5は赤外光を透過させるためであり、この部分だけ赤外光に対しては透明な可視光カット部材(耐熱フィルムまたはガラス)を下面に装着しても良い。
【0026】
トッププレート2の上面の各口(円表示4)に、調理鍋6を置き加熱調理を行う。図2に示すように、加熱コイル7にインバータ回路8(高周波電流供給手段)からの高周波電流を供給すると、外周側の第1のコイル7aと内周側の第2のコイル7bに分割された加熱コイル7が高周波磁界9(図中破線で示す)を発生し、この高周波磁界が調理鍋6と鎖交して、渦電流を発生し、そのジュール熱により調理鍋6自身が誘導加熱され発熱する。従って、調理鍋6内の調理物は、調理鍋6自身の発熱によって加熱調理される。このとき、調理鍋6の下にあるトッププレート2も、発熱した調理鍋6からの伝熱あるいは放射熱により高温になる。
【0027】
図3に加熱コイル7周辺の断面を詳しく示す。図3に示すようにトッププレート2下面には第1のコイル7aと第2のコイル7bの間にコイル間隙7cを備えて分割された加熱コイル7が耐熱プラスチックで構成されるコイルベース10内に同心円状(渦巻き状)に巻かれて配置される。加熱コイル7の下側にはコイルベース部材内部にコ字状のフェライト11が凸部を上にして放射状に配置されている。このフェライト11は加熱コイル7が発生する磁束をトッププレート2上の調理容器である調理鍋6に効率良く導くために配置される。また、磁束がコイルベース10下部に漏洩するのを防止する。フェライト11は透磁率が高く磁束はほとんどフェライト11内を通過するからである。
【0028】
コイルベース10の下には加熱コイル7を冷却するためのコイル冷却風路15が設置される。コイル冷却風路15は二つに分けられ、一つは第1のコイル7aの内周側に接続され、第2のコイル7bおよび第1のコイル7a上面を冷却するコイル上面冷却風路15a、他の一つは第1のコイル7aの下面を冷却するコイル下面冷却風路15bである。コイルベース10の中心部分下に位置するコイル上面冷却風路15aの上面には円形上のコイル上面冷却風送出孔15cが開口している。
【0029】
コイルベース10の中心部は円筒状の内空洞14aになっており、第1のコイル7aの内周側にはフェライト11を内蔵する放射上梁に繋がる円筒状の外空洞壁14bになっている。この外空洞壁14bの下部に、コイル上面冷却風路15aのコイル上面冷却風送出孔15cが接続される。コイル上面冷却風送出孔15cの周囲にはグラスウール等のシール材16が設けられ先の外空洞壁14bに接続されている。
【0030】
コイル冷却風路15の下にはインバータ回路8等の回路基板を内蔵する回路冷却風路17a,17bが2段重ねて設けられ、夫々には左右の加熱コイル7L,7Rのインバータ回路等が内蔵されている。これらの冷却風路は本体1に固定される。
【0031】
コイルベース10はコイル下面冷却風路15bまたは回路冷却風路17aに固定される3個のコイルベース受け12からバネ13で押され、トッププレート2の下面に押し付けられる。
【0032】
コイル上面冷却風送出孔15c下のコイル上面冷却風路15a中には鍋温度検出装置18が配置される。鍋温度検出装置18は誘導加熱された調理鍋6の底面温度をトッププレート2の赤外線透過窓5を透過する赤外線から検出する。
【0033】
加熱調理中にはコイル上面冷却風路15a,コイル下面冷却風路15b,回路冷却風路17a,17bには本体1に内蔵されるファン(図示せず)から外気が導入される。コイル上面冷却風路15a内を流れる冷却風は鍋温度検出装置18を冷却しながらコイル上面冷却風送出孔15cから円筒状の外空洞壁14b内のコイル間隙7cおよび内空洞14aを上昇し、コイル間隙7cおよび内空洞14a上部から、トッププレート2に遮られトッププレート2と加熱コイル7の間をコイル径方向外側に流れ、加熱コイル7の上面およびトッププレート2下面を冷却する。コイル下面冷却風路15bのコイル7aの下面にあたる部分には小さな孔が複数開けられ、コイル下面冷却風路15b内を流れる冷却風は、ここからコイル7a下面に向かって噴流してこれを冷却する。
【0034】
図4にトッププレート2を除いた図3の上面図の詳細を示す。加熱コイル7,コイルベース10,コイル上面冷却風路15aの詳細構成図である。加熱コイル7および内空洞14aと鍋温度検出装置18の水平面での位置関係を示す。
【0035】
加熱コイル7は、テフロン(登録商標)等で絶縁被膜されるリッツ線で同心円状に同一方向に巻回され、外周側の第1のコイル7aと内周側の第2のコイル7bに分割される。そのコイル間隙7cは幅およそ15mmの同心帯状をなし、第1のコイル7aの巻き終わりはコイル間隙7cを架橋し第2のコイル7bの巻き始めとなり、第1のコイル7aと架橋線7dと第2のコイル7bで加熱コイル7を構成する。コイルベース10には第1のコイル7aの内周側に円筒状の外空洞壁14bが設けられ、その内側がコイル間隙7cとなっている。また、第2のコイル7bの内周側に内空洞14aが設けられる。さらに、コイル間隙7cの一部、放射状に配置される二つのフェライト11間に円筒状の視野筒19(内径約12mm)が設けられ、この視野筒19の下に鍋温度検出装置18が設置される。
【0036】
視野筒19の上部横にはトッププレート2の赤外線透過窓5の横下面に接触するようにサーミスタ20a(第1の温度検出手段)が設置される。
【0037】
誘導加熱された鍋底面からの赤外線はトッププレート2の赤外線透過窓5を透過し、視野筒19から後で詳細に説明する鍋温度検出装置18に内蔵されるサーモパイル25に入射する。
【0038】
図5は先の図4を裏から見た図を示す。コイルベース10には2個の低電圧端子21a,高電圧端子21bが設けられ、低電圧端子21aには第1のコイル7aの巻き始めが接続され、高電圧端子21bには第2のコイルの巻き終わりが接続される。この端子にはインバータ回路8の出力線22a,22bがねじで固定される。銅やアルミニウム等の非磁性体の鍋では4〜5kVの高電圧が出力される高電圧出力線22bは高電圧端子21bに接続される。視野筒19の下部外壁側面にはサーミスタ20b(第2の温度検出手段)が視野筒19の内壁温度を検出するように壁内部に埋め込まれる形に設置される。
【0039】
図4,図5で説明したように鍋温度検出装置18は、架橋線7dの近傍をさけ、かつ高電圧出力線22bが接続される高電圧端子21bから離れた位置にあるコイル間隙7cに設けられた視野筒19の下にそのケース窓30が位置するように設置される。
【0040】
図6に鍋温度検出装置18の詳細を示す。
【0041】
図6(a)は、鍋温度検出装置18の平面図を示す。鍋温度検出装置18は、ヒートシンク55を被せた赤外線検出センサ(サーモパイル25)と反射型フォトインタラプタ26を中心に構成される。サーモパイル25と反射型フォトインタラプタ26はサーモパイルの出力信号を増幅するサーモパイル温度検出回路72(後で詳細を説明する)と反射率検出回路73(後で詳細を説明する)が実装される電子回路基板27に配置され、このサーモパイル25と反射型フォトインタラプタ26および電子回路基板27は、全体をプラスチック部材の赤外線センサケース29(一点鎖線で示す)内に密封される。この赤外線センサケース29には赤外線を透過させるためにケース窓30が開けられ、このケース窓30にはトッププレート2を構成する結晶化ガラスとほぼ同じ光学特性(但し図14破線で示すように1μm以上の長波長側の光学特性はほぼ同じだが、短波長側でトッププレートに比べて透過率小の領域が400nmほどあり、この部分の可視光がカットされるため目には赤黒く見える)を持つ結晶化ガラスを薄く正方形に切り出したものを結晶化ガラス光学フィルタ31として嵌め込んである。また、結晶化ガラス光学フィルタ31の上面にはその温度を検出するサーミスタ20c(第3の温度検出手段)が設けられている。
【0042】
そして、結晶化ガラス光学フィルタ31の下にヒートシンク55を被せたサーモパイル25と反射型フォトインタラプタ26が電子回路基板27上に実装されている。この赤外線センサケース29は、周りをアルミニウム等の透磁率がほぼ1の金属ケース32(2点鎖線で示す)で覆っている。当然、先のケース窓30の所は開口されている。そして、更にアルミニウム製の金属ケース32は、周りをプラスチック部材の外側赤外線センサケース33で覆っている。当然先のケース窓30の所は開口されている。つまり、サーモパイル25は3重のケースで覆われた形になっている。
【0043】
そして、鍋温度検出装置18はそのケース窓30がコイルベース10の視野筒19内を望むようにコイル上面冷却風路15a内に設置される。
【0044】
図6(a)中のA−A′線に沿った断面図を図6(b)に示す。これは、赤外線センサケース29内に設置される電子回路基板27に装着されるサーモパイル25および反射型フォトインタラプタ26と赤外線センサケース29のケース窓30,結晶化ガラス光学フィルタ31との位置関係を示す断面図である。
【0045】
図7に反射型フォトインタラプタ26の詳細を示す。反射型フォトインタラプタ26は赤外線発光素子としての赤外線LED50と赤外線受光素子としての赤外線フォトトランジスタ51を同一プラスチック部材に並べてモールドしたものである。赤外線LEDの発光面上にはプラスチックでレンズが構成され細いビームで930nm付近の赤外光を上方に照射する。赤外線フォトトランジスタ51の受光面上には可視光阻止のプラスチックでレンズが構成され、先の照射赤外光の物体(鍋底面)での反射赤外光を狭い視野角で受光し、その受光量に比例した電流を出力する。この反射型フォトインタラプタ26は赤外線発光素子と受光素子の対で構成されるものでトッププレート2上に置かれた調理鍋6底面の反射率を計測するものである。
【0046】
反射型フォトインタラプタ26前面の発光,受光部を結晶化ガラス光学フィルタ31の下面直下に配置している。これは赤外線発光が直上の結晶化ガラス光学フィルタ31で反射され、受光されるのを防止するためである。
【0047】
赤外線LED50の赤外線発光は結晶化ガラス光学フィルタ31を85%以上透過するが、残り15%は反射され、すぐ横の赤外線フォトトランジスタ51で受光される。この反射光はすぐ横の赤外線フォトトランジスタ51で受光される。この受光レベルは反射面との距離が短いと大きく、本来目的であるトッププレート2上にある鍋底面での反射光の受光に影響する。このため、本実施例では、図示するように結晶化ガラス光学フィルタ31と反射型フォトインタラプタ26(赤外線LED50および赤外線フォトトランジスタ51)の発光・受光面との距離を500μm以内程度にまで接近させ、赤外線LED50の発光赤外線が結晶化ガラス光学フィルタ31で反射する反射分が赤外線フォトトランジスタ51で受光されないようにしている。理想的には結晶化ガラス光学フィルタ31下面と反射型フォトインタラプタ26の上面を接触させたほうが望ましい。
【0048】
図8にサーモパイル25の詳細を示す。図8(a)はヒートシンク55とサーモパイル25の斜視図を示す。図8(b)はヒートシンク55を除いた図8(a)中B−B′で示す線でのサーモパイル25の断面図であり、図8(c)は図8(b)中C−C′で示す線での断面の平面図である。なお、熱電対が見えるように、赤外線吸収膜を省略して示してある。
【0049】
サーモパイル25は熱電対(サーモカップル)を多数縦列接続した(パイリング)したもので、ニッケルめっき鋼板等の金属キャン35と金属ステム36からなる金属ケース37内にこれが内蔵されている。およそ300μm厚のシリコン基材38表面に電気的および熱的に絶縁するためシリコン酸化膜39を形成し、この上にポリシリコン,アルミを順次パターン蒸着しポリシリコン蒸着膜40,アルミ蒸着膜41で熱電対を多数作成し、これを縦列接続する。ポリシリコン,アルミ接合点(測温接点)のあるシリコン基材38中央部には、黒体に近い酸化ルビジウム膜等の赤外線吸収膜43を形成する。ポリシリコンおよびアルミ蒸着膜の一端は冷接点部44であり、これはシリコン基材38の周囲に配置する。シリコン基材38の裏面を周囲(冷接点部)を残して290μmまでエッチングし、測温接点部分のあるシリコン基材の厚みを10μmに形成する。これは熱電導の良好なシリコンを薄くすることで、測温接点部42と冷接点部44の熱伝導を少なくし測温接点部と冷接点部を熱的に絶縁するためである。
【0050】
このシリコン基材38を金属ケース37の金属ステム36にボンド等で固定する。同時に金属ステム36にはセラミック上に膜形成したNTCサーミスタ45を同様に配置する。これは金属ケース37内にある熱電対の雰囲気温度を検出し、熱電対の熱起電力を補正するためである。詳細は後述する。金属ステム36には絶縁シールされた4本の金属ピン46が貫通配置されており、この金属ピンに先の熱電対の出力とNTCサーミスタ45がワイヤ接続される。金属ステム36には、筒状の金属キャン35が不活性ガス中で被せられ溶着される。この金属キャン35の上面には小穴の窓47が開けられ、ここに内側からガラス凸レンズ48が装着されている。この小穴の垂直下に先の測温接点部42(赤外線吸収膜43の下にある)が位置するようにシリコン基材38が固定される。このガラス凸レンズ48は赤外線透過窓5の視野範囲が赤外線吸収膜43に結像するように設計される。
【0051】
サーモパイル25内の熱電対の測温接点部42(赤外線吸収膜43の下にある)にはこの小穴の窓47を通過しガラス凸レンズ48で集光された赤外線で加熱され、この加熱温度上昇は通過した赤外線エネルギーに比例し、熱電対の冷接点部44と測温接点部42の温度差に比例した電圧が熱電対出力の金属ピン46に出力される。
【0052】
前述したようにサーモパイル25は金属ケース37が熱的には熱電対の冷接点と同じであり、この温度変動がそのままサーモパイル25の出力変動となってしまう。そのため、ヒートシンク55を熱バッファ(熱容量を大きくする)として装着して周囲温度変化に対する出力変動を減少させる。
【0053】
図9に本実施例の誘導加熱調理器の制御ブロック図を示す。マイクロコンピュータ60が誘導加熱調理器の動作を制御する。以下記号Rは図1の手前右にあるに誘導加熱口に関するブロックを表し、記号Lは図1の手前左にある誘導加熱口に関するブロックを表す。2つのインバータ回路8Rおよび8Lは加熱コイル7R及び7Lに高周波電流を供給する。このインバータ回路8R,8Lの動作周波数及びコイルへの供給電力を調整するのが周波数制御回路61R,61L及び電力制御回路62R,62Lである。動作周波数を変化させるのは、鍋の金属種類によって高周波電流の周波数で誘導加熱効率が変化するためである。一般に鉄では20kHz、これより抵抗率の低い銅,アルミでは70kHz以上の周波数が用いられる。この周波数切り替えは図示しない鍋種類判別手段の判断に基づいてマイクロコンピュータ60が周波数制御回路を制御して行う。
【0054】
各インバータ回路8R,8Lには整流回路63から直流電圧が供給される。この整流回路63には電源スイッチ64を介して3端子200Vの商用電源65が接続されている。商用電源の接地端子は本体1の金属部に接地線で接続される。ラジエントヒータ66にはラジエントヒータ回路67を介して商用電源65が接続され、ラジエントヒータ回路67がラジエントヒータ66に供給する電力を制御する。
【0055】
マイクロコンピュータ60には、操作表示部3の操作スイッチ68,表示回路69が接続され使用者の操作指示を受け付け、機器の動作状態表示を行う。また、ブザー70が接続され使用者の操作ボタン押しあるいはエラー等の警告などを報知する。マイクロコンピュータ60は使用者の指示に従い、周波数制御回路61R,61Lと電力制御回路62R,62L及びラジエントヒータ回路67を制御して、トッププレート2上の調理鍋6を加熱する。
【0056】
サーモパイル25はサーモパイル温度検出回路72に接続され出力が増幅され、マイクロコンピュータ60のAD端子に入力される。反射型フォトインタラプタ26は反射率検出回路73に接続され、マイクロコンピュータ60のポート出力で発光素子の発光を制御され、調理鍋6で反射された赤外光は受光素子で受光され、その出力信号は増幅されマイクロコンピュータ60のAD端子に入力される。サーモパイル温度検出回路72および反射率検出回路73の動作の詳細は後述する。更にサーミスタ20aR,20bR,20cRはその入力を選択してその温度検出値を順次マイクロコンピュータ60のAD端子に出力するサーミスタ温度検出回路74Rに接続され、その出力はマイクロコンピュータ60のAD端子に入力される。同様にサーミスタ20aL,20bL,20cLもサーミスタ温度検出回路74Lに接続され、その出力もマイクロコンピュータ60のAD端子に入力される。
【0057】
赤外線量算出手段,減算手段,反射率補正手段はマイクロコンピュータ60のソフトウエアで行われる。後で詳細は述べる。マイクロコンピュータ60は各サーミスタでトッププレート2,視野筒19,結晶化ガラス光学フィルタ31の温度を知り、各部材の放射赤外線量に相等する電圧を得る。前記温度から電圧への変換は後述する方法で予めテーブルの形で記憶されている(赤外線量算出手段の動作)。
【0058】
そして、マイクロコンピュータ60はサーモパイル温度検出回路72の出力から先の各電圧を減算し、トッププレート2,視野筒19,結晶化ガラス光学フィルタ31の影響を相殺する(減算手段の動作)。
【0059】
また、マイクロコンピュータ60は反射率検出回路73の出力から調理鍋の赤外線反射率を知り、先の減算結果を反射率で補正して調理鍋の温度を検出する。この処理もマイクロコンピュータ60のソフトウエアで行われる(反射率補正手段の動作)。そして、電力制御回路62を介して、調理鍋6の加熱を制御する。この処理法の詳細は後述する。
【0060】
図10にサーモパイル温度検出回路72の詳細を示す。サーモパイル25の熱電対出力(熱起電力)(図中(+),(−)記号間の電圧)はオペアンプ72−1で約2000倍に増幅され出力端子72−2に出力される。この出力電圧はマイクロコンピュータ60のAD端子に入力される。オペアンプ72−1の増幅度は抵抗72−3(=R1)と抵抗72−4(=R2)の比(R2/R1)で決まる。また、サーモパイル内のNTCサーミスタ45は、回路電源電圧を抵抗72−5,72−6,72−7で分圧された電圧源(抵抗72−6の両端)に抵抗72−8と直列接続された状態で接続され、この抵抗72−8との接続点aは熱電対出力端子(−)に接続されている。NTCサーミスタ45は負の温度特性を持った抵抗素子であり温度上昇で抵抗値が低下する。このため、サーモパイル25内の温度が上昇すると先の接続点aの電圧は上昇する。熱電対出力(図中(+),(−)記号間の電圧)は測温接点42(赤外線エネルギーで加熱される点)と冷接点部(熱電対出力端子)44の温度差に比例する。このため、サーモパイル25の設置される雰囲気温度で金属ケース37内雰囲気(NTCサーミスタが内蔵される)温度が上昇すると熱電対出力は減少する。この減少を接続点aの電圧上昇で補償する。すなわちNTCサーミスタ45はサーモパイル(熱電対)25の出力すなわち測定対象の放射赤外線エネルギーによる出力が周囲温度で変化するのを防ぐために使用される。つまり、サーモパイル25の周囲温度が変化しても、測定対象の温度すなわち入射する赤外線エネルギーが変化しなければ出力変化を起こさないという冷接点温度補償を行っている。
【0061】
図11,図12を用いて反射率検出回路73の詳細を示す。図11において、50は発光素子である赤外線LEDであり、例えばその発光波長は930nmである。51は赤外線フォトトランジスタであり、例えばピーク感度波長が800nmで赤外線LED50の発光波長930nmでもピーク感度の80%の感度をもつものである。また、可視光をカットする光学フィルタが受光面に配置されている。図12に反射率検出回路73の動作タイミングチャートを示す。反射型フォトインタラプタ26の発光素子である赤外線LED50はトランジスタ73−1で駆動される。この駆動はマイクロコンピュータ60の出力ポートから駆動信号端子73−2に入力される信号で制御される。図12(a)にこの信号を示す。デューティ50%の矩形波信号を駆動信号端子73−2に入力すると、赤外線LED50は信号が5Vのとき発光し、0Vのときは消灯する。この発光強度は赤外線LED50に流す電流に比例し、この電流は抵抗73−3の値で決められる。本実施例では抵抗値を固定して発光強度は一定である。この赤外発光がトッププレート2及び調理鍋6の底面で反射され、受光素子である赤外線フォトトランジスタ51で受光されると光電流により抵抗73−4に電圧が発生する。この電圧を図12(b)に示す。反射が大きく(受光量が多く)なれば電圧は比例して大きくなる。この信号電圧はコンデンサ73−5で直流分がカットされ、交流信号(図12(c)に示す)としてオペアンプ73−6で構成される正転直流増幅器に入力される。ここで交流信号のプラス側成分のみが増幅される。図12(d)にこれを示す。この増幅されたデューティ50%の信号は充放電回路73−7で直流の平均値電圧に変換され、出力端子73−8から出力される。この出力はマイクロコンピュータ60のAD端子に入力される。
【0062】
このように反射率検出回路73は発光強度が一定のキャリア変調された赤外光を鍋底面に放射し、鍋で反射される赤外光を受光してその平均値電圧を反射電圧として得ることで反射率に相当する値を検出する。調理鍋6が置かれていない場合にはトッププレートのみでの反射でありこれは一定の値を示す。これからの増加分が鍋からの反射分であり、この量が鍋の反射率に相当するものである。
【0063】
赤外発光をキャリア変調し、受光経路で直流成分をカットしているのは、自然光あるいは白熱電灯,蛍光灯などの照明機器に含まれる一定の赤外光が鍋の反射率検出に影響するのを防止するためである。(可視光は受光素子の光学フィルタでカットされる。)また、赤外線フォトトランジスタ51の暗電流の影響も防止している。
【0064】
以下本実施例1の動作を説明する。
【0065】
トッププレート2上に置かれた調理鍋6は誘導加熱により発熱する。この加熱により調理鍋6底面からは赤外線が放射される。この全放射エネルギーEは鍋温度Tの4乗に比例したものである。(E=σT4;ステファン・ボルツマンの法則)図13にプランクの分布則から算出される黒体温度の分光放射エネルギーを示す。この分光放射エネルギーを全波長域で積分すれば、全放射エネルギーEが求まり、これは温度(絶対温度)の4乗に比例する。これが前述のステファン・ボルツマンの法則であり、この係数σがステファン・ボルツマン係数である。分光放射エネルギーのピーク波長はウィーンの変移則から、調理温度100〜300℃で5μm〜8μmである。
【0066】
誘導加熱された鍋底は、黒体温度の全放射エネルギーEに鍋底の放射率εを乗じた全放射エネルギーを温度に応じて放出する。すなわち黒体温度の全放射エネルギーEと鍋底温度のそれ(E′=εσT4)との比が放射率εである。
【0067】
一方、非磁性体である結晶化ガラス(トッププレート2)の光学特性を図14に実線で示す。図14に実線で示すように、結晶化ガラスは、0.2μm〜2.9μmの波長の光を80%以上透過し、3〜4.5μmの波長の光を30%程度透過し、4.5μmよりも長い波長、及び、0.2μmよりも短い波長の光をほとんど透過しない。この光学特性のため鍋から放射される赤外線放射エネルギー(図13参照)の大部分(波長5μm以上の大部分)はトッププレート2を通過できない。通過できるのは鍋から放射される全赤外線放射エネルギーの1%程度である。
【0068】
赤外線センサとしては周知のように、赤外線フォトダイオード,赤外線フォトトランジスタのような量子型とサーモパイル,焦電素子のような熱型とがある。量子型センサは量子効果で赤外線を検出するため狭い波長帯域で高い感度を持ち、熱型は広い波長帯域で低い感度を持つのが特徴である。量子型は半導体の種類で感度波長が決められ、シリコンのように安価に購入できるものは実用感度波長が可視光外(0.8μm)から1μm以下のため、検出温度の範囲が300℃以上となる。一方熱型は量子型に比べ、可視光から20μm以下の広い波長帯域で均一の低い感度を持つ(原理的には波長依存性を持たない)。このため、センサへの赤外線受光面の前に光学フィルタを設け、検出温度範囲波長を狭めて外乱を防ぐ。
【0069】
本実施例では、調理温度範囲が100から300℃であるため、赤外線センサとして熱型であるサーモパイルを用いる。同じ熱型の焦電素子は微分型のセンサであるため、赤外線入射を断続する必要があり、普通機械的なチョッパ機構が使われる。このため、信頼性の点で誘導加熱調理器のような家電品に用いるのは不向きである。一方サーモパイルはこのような機構を必要とせず、また、近年MEMS等の技術により半導体プロセスを用い構成する熱電対を微小化し多数堆積(パイリング)して感度を向上させたものが安価に供給されている。
【0070】
近年多くの体温計に用いられるサーモパイルの光学フィルタとしては透過波長が1〜15μmのものが使われる。これはウィーンの変移則から人体の赤外線放射エネルギーのピーク波長が約10μm(体温36℃)であり、上記光学フィルタを用いるのが最適なためである。
【0071】
この光学フィルタを有するサーモパイルを用いて、トッププレート2を通して調理鍋の温度(25〜300℃)を非接触で計測しようとすると、前述したようにサーモパイルに到達する赤外線エネルギーは約1/100に減衰するためとほとんど計測できない。
【0072】
そのため、本実施例の鍋温度検出装置18では、サーモカップル(熱電対)を半導体プロセスで比較的容易に作成できるポリシリコン・アルミニウム金属対とし、これを50ほど堆積したサーモパイル25を用い、その出力を増幅回路で2000倍に増幅し微小な赤外線エネルギーを検出できるようにしている。
【0073】
サーモカップルで物体の温度を計測する場合には、冷接点を氷点(0℃)に固定して測温接点を物体に接触させて計測する。サーモパイルは図8で説明したように、サーモカップルが多数堆積されたものであり、入射赤外線で加熱される多数の測温接点とシリコン基材38上にある多数の冷接点で構成される。そして、冷接点は金属ケース37の金属ステム36にボンドで固定されるため、熱的にはサーモパイルの金属ケース37(金属キャン35と金属ステム36)が冷接点となっている。そして、この金属ケース37は通常のサーモカップルのように氷点に固定することができない。
【0074】
仮に、一つのサーモカップルの熱起電力が5μV/℃、パイル数50、直流増幅器の増幅度を2000とすると、金属ケース37の温度が1℃変化すると、直流増幅器の出力では500mVの電圧変動になる。つまり、サーモパイル25周囲の温度変動を押さえることが必要になる。
【0075】
本実施例の鍋温度検出装置18は、加熱調理中の鍋底高温部を検出可能にするために、分割された加熱コイル7が発生する高周波磁界の磁束密度が最も強いコイル間隙7c直下に配置される。この位置は、加熱コイル7の下に放射状に配置される棒状のフェライト11の間であり、磁束はほとんどフェライト中を通過するため漏れ磁束の少ない場所ではある。しかし、加熱コイル7下面からの距離は20mm程度であるため漏れ磁束は大きく、ここに位置する金属を誘導加熱しその温度を上昇させる。例えば3kWの高周波電力を加熱コイルに入力してトッププレート2上に載置される調理容器である鍋を誘導加熱する場合には、この場所にある磁性体の鋼板では約30℃も温度上昇する。非磁性体のアルミニウムでも約5℃も温度上昇する。
【0076】
調理中、誘導加熱される鍋底は100〜300℃の高温になる。そして、トッププレート2および下面の加熱コイル7も鍋底からの熱伝導,熱輻射で高温となる。
【0077】
さらに、加熱コイル7には十数アンペアの高周波電流を流すためコイル自身もジュール発熱する。これらトッププレート,加熱コイルを冷却するため、コイル上面冷却風路15a,コイル下面冷却風路15bには外気が導入され、前述のように加熱コイル7に風を当てて冷却する。
【0078】
また、鍋温度検出装置18の配置される下には加熱コイルに高周波電力を供給するインバータ回路8が冷却風路17a,17b中に配置される。このインバータ回路は20〜90kHz、十数アンペアの電流をスイッチングする回路から構成される。このため、大きな電磁波を輻射することになる。
【0079】
このように、鍋温度検出装置18、特に内蔵されるサーモパイル25は、(1)加熱コイル7からの漏れ磁束、(2)コイル冷却のための冷却風による温度変化、(3)インバータ回路から輻射される電磁波ノイズ、に晒されることになる。これら外乱に対応して、鍋温度検出装置18は加熱調理中の鍋底高温部を検出しなければならない。
【0080】
前述したサーモパイル温度検出回路72の動作説明のごとく、サーモパイル25の出力が雰囲気温度で変化しないように、内蔵のNTCサーミスタ45を用いて回路的に温度補償をしている。しかし、NTCサーミスタ45はセラミックチップの上に薄膜で形成され、これを金属ステム36にボンド等で固定されているため、熱的には冷接点と等価である金属ステム36すなわち金属ケース37の温度変化に追従しにくく、時間遅れが生じる。また、温度抵抗特性の非線形性のため広い温度範囲で正確に温度補償するのが難しい。これらの点でサーモパイル25の周囲温度変化に即応して前述回路で十分な温度補償を行うのは難しい。具体的には1℃/数10分程度の温度変化には対応できるが、1℃/1分程度の温度変化に追従させるのは困難である。前述したように、誘導加熱調理開始と同時に加熱コイル7を冷却するため外気が導入される。前の調理である程度、鍋温度検出装置18と周囲の雰囲気温度が上昇していた場合には、このとき鍋温度検出装置18は急速に(1℃/1分以上で)冷却されることになる。
【0081】
サーモパイル25が内蔵される鍋温度検出装置18はなるべく一定温度雰囲気におくのが望ましい。このため、本実施例では、外気が導入されるコイル上面冷却風路15a内に鍋温度検出装置18を設置し調理中には外気でサーモパイル25とサーモパイル温度検出回路72を冷却しこれらの温度上昇を防止している。また、コイル上面冷却風路15a内の気流がサーモパイル25の金属ケース37およびサーモパイル温度検出回路72の半導体,抵抗等に直接当たり熱ゆらぎを起こすのを防ぐため、防風ケースである赤外線センサケース29でこれを覆っている。また、サーモパイル25とサーモパイル温度検出回路72は赤外線センサケース29内の空気で空気断熱されることにもなる。温度変化に対して安定にサーモパイル25の出力を直流増幅した後低い出力インピーダンスの信号電圧として、後述するマイクロコンピュータ60のAD端子に出力している。
【0082】
さらに、この赤外線センサケース29をアルミニウム等の透磁率がほぼ1である金属ケース32で覆い、加熱コイルが発生する交流磁場を遮蔽することでサーモパイル25の金属ケース37が加熱コイル7の発生する高周波交流磁界で誘導加熱され温度上昇しないようにしている。また、この金属ケース32は、鍋温度検出装置18の下部に配置されるインバータ回路からのパルス雑音(放射電磁波)に対しての電磁シールドにもなっている。
【0083】
この金属ケース32は、加熱調理中には周囲雰囲気温度および加熱コイル7からの漏れ磁束で誘導加熱され、アルミニウムの場合5〜10℃温度上昇する。この温度上昇がおさまる前に続けて調理を行う場合、外気を急速に導入して金属ケース32に当てると金属ケース32が急速に冷え、結果赤外線センサケース29内のサーモパイル25の周囲温度が急に低下することになる。この逆の場合、例えば冬朝一番に調理を行う場合、機体内の金属ケース32は夜十分に冷却され5℃程度にあり、使用者が20℃に暖房された調理室で調理を開始した場合には、この暖気がコイル上面冷却風路15aに導入され、20℃の暖気が5℃の金属ケース32に当てられることになる。本実施例では、このような外気による金属ケース32の急激な温度変化を防止するために、この金属ケース32を更にプラスチックの外側赤外線センサケース33で覆っている。これで金属ケース32に直接冷却風をあてずに風による温度急変を防止している。
【0084】
さて、トッププレート2は誘導加熱された調理鍋6から赤外線放射を吸収することおよび接触熱伝導とで加熱される。図14で実線に示すように、トッププレート2は0.2μm〜2.9μmの波長の光を80%以上透過し、3〜4.5μmの波長の光を30%程度透過し、4.5μmよりも長い波長、及び、0.2μmよりも短い波長の光をほとんど透過しない。
【0085】
放射エネルギーが物質表面に入射すると、その一部ρは反射され、一部αは吸収され、残りτは透過する。これらの量の間には、エネルギー保存則からρ+α+τ=1が成立する。トッププレート2上に調理鍋6が置かれた状態では、調理鍋6の赤外線放射エネルギーのトッププレート2での反射はほとんどゼロとみなせるため、トッププレート2では吸収率α+透過率τ=1が成立していると見てよい。キルヒホフの法則より吸収率α=放射率εであるため、トッププレート2は調理鍋6からの赤外線放射エネルギーのうち、0.2μm〜2.9μmの波長では80%以上透過し、残り20%を吸収しこれを放射する。また、3〜4.5μmの波長では30%程度透過し、残り70%を吸収しこれを放射する。4.5μmよりも長い波長、及び、0.2μmよりも短い波長ではほとんど透過せず、すべてを吸収してこれを放射する。熱伝導で加熱された分も同様である。波長4.5μm以上では熱伝導加温の赤外線エネルギーはほとんどトッププレート2表面から放射される。
【0086】
このため、サーモパイル25を使用して、トッププレート2上の調理鍋6の温度を検出する場合にはトッププレート2自身の加熱が放射する赤外線が問題となる。例えばサーモパイル25に付属するガラス凸レンズ48の透過波長が1〜15μmであれば、トッププレート2が放射する4.5μmよりも長い波長の赤外線によってサーモパイル25の出力が大きく影響を受け、トッププレート2上の調理鍋底の温度を正確に検出できないことになる。トッププレート2を透過する鍋の放射赤外線エネルギーは1μm〜2.9μmの約2μmの帯域、これに対しトッププレート2自身が放射する赤外線エネルギーは4.5μm〜15μmの約10μmの帯域であり、同じ温度であればサーモパイル出力のうち、調理鍋6の温度による分の5倍がトッププレート2の温度によることになる。
【0087】
本実施例では、上記を防止するためサーモパイル25で構成される鍋温度検出装置18の赤外線センサケース29に、赤外線を透過させるためのケース窓30を開け、このケース窓30にトッププレート2を構成する結晶化ガラスを薄く正方形に切り出したものを結晶化ガラス光学フィルタ31として嵌め込んである。そして、サーモパイル25に入射する赤外線の内トッププレート2が放射する分を除去する。トッププレートが放射する波長2.9μm以上の部分はトッププレート2と同じ透過特性を持つ結晶化ガラス光学フィルタ31の光学特性によってサーモパイル25への入射が阻止される。
【0088】
結晶化ガラス光学フィルタ31をトッププレート以外の材料で作成しても良いが、図14で実線に示すような急峻な特性を示す光学フィルタを作成するのは非常に困難で高価なものになる。
【0089】
また、結晶化ガラス光学フィルタ31は、その下に配置されるサーモパイル25や反射型フォトインタラプタ26等がトッププレート2の赤外線透過窓5から見えなくする効果をもたせている。前述したように(図14の破線で示すように)1μm以上の長波長側の光学特性はトッププレート2とほぼ同じだが、短波長側でトッププレートに比べて透過率小の領域が400nmほどあり、この部分の可視光がカットされるため目には赤黒く見え、下に配置される部品を見えなくしている。
【0090】
更に、サーモパイル25のガラス凸レンズ48として波長5μm以上を透過させない5μmショートパスフィルタを有するガラス(図14に薄線で示す)を用いている。これは周囲温度で暖められる結晶化ガラス光学フィルタ31自身および赤外線センサケース29が放射する赤外線をも波長5μm以上は透過させないようにするためである。というのは先に述べたように鍋から放射される1〜2.9μmの赤外線エネルギーはトッププレートで通過を制限されているため非常に微小であり、サーモパイル25の出力増幅を大きくせざるを得ないため周囲温度での5μm以上の赤外線放射に敏感であり、徹底的に鍋底以外からの4.5μm以上の赤外線がサーモパイルの赤外線吸収膜43に入射するのを防止する必要があるためである。
【0091】
なおこのガラス凸レンズ48をトッププレート2や結晶化ガラス光学フィルタ31と同じ結晶化ガラスで作成してもよい。こうすれば前述した理由で結晶化ガラス光学フィルタ31の温度による赤外線放射をよりよく遮断することができるので好適である。
【0092】
図15に本実施例(図3の構成)を模式的に、各部材の放射赤外線エネルギー、この赤外線エネルギーが通過する各部材(トッププレート2,結晶化ガラス光学フィルタ31,ガラス凸レンズ48)でフィルタリングされ、サーモパイル25の赤外線吸収膜43への入射エネルギーとなる観点でまとめた図を示す。
【0093】
調理鍋6を黒体としてある温度Tnでの赤外線放射エネルギーQn0はトッププレート2を透過する。このとき、Qn0はトッププレート2の透過特性でフィルタリングされ、結果的に減衰して視野筒19内に入射する。この入射赤外線エネルギーをQn1とする。そして、このQn1は鍋温度検出装置18の結晶化ガラス光学フィルタ31を透過する。このとき、Qn1は結晶化ガラス光学フィルタ31の透過特性で再びフィルタリングされ、結果的に更に減衰してQn2となる。次にサーモパイル25のガラス凸レンズ48を透過してサーモパイルの測温接点上の赤外線吸収膜43に入射する。このとき再びガラス凸レンズ48の透過特性で再びフィルタリングされ最終的にQn3となり赤外線吸収膜43に吸収され熱となる。
【0094】
さて、トッププレート2は調理鍋6からの熱伝導および放射熱で加熱される。そのため、トッププレート2も赤外線エネルギーを放射する。この赤外線放射エネルギーはトッププレート2の温度Ttと放射率から算出できる。放射率は1から図14に実線で示す透過率を引いた値である。このエネルギーをQt0とする。前述同様これは、結晶化ガラス光学フィルタ31を透過して減衰しQt1となり、次にガラス凸レンズ48を透過して減衰しQt2となり赤外線吸収膜43に吸収され熱となる。
【0095】
また、視野筒19内壁も、調理鍋6の放射熱および加熱コイル7からの熱伝導で加熱される。このため、視野筒19内壁も赤外線エネルギーを放射する。この赤外線放射エネルギーは、サーモパイル25の視野特性および視野筒19の寸法(内径,長さ)により一部分がサーモパイル25に入射することになる。図16に実施例で使用したサーモパイル25の視野特性を示す。視野特性が非常に狭ければ、このセンサ視野筒からの赤外線放射はサーモパイル25に入射しないが、一般には狭い視野特性を小型安価なサーモパイルで作ることは困難であり、実施例のようにサーモパイルと視野筒の距離が短い場合は視野筒からの赤外線放射がサーモパイルに入射することになる。このサーモパイルに入射する赤外線放射エネルギーQb0は視野筒19の温度Tbと放射率(約0.7)およびサーモパイルの視野特性から算出できる。前述同様これは、結晶化ガラス光学フィルタ31を透過して減衰しQb1となり、次にガラス凸レンズ48を透過して減衰しQb2となり、赤外線吸収膜43に吸収され熱となる。
【0096】
また、結晶化ガラス光学フィルタ31も調理鍋6からの放射熱および鍋温度検出装置18の設置されるコイル上面冷却風路15aの雰囲気温度で加熱される。このため、結晶化ガラス光学フィルタ31も赤外線エネルギーを放射する。この放射エネルギーQg0は、トッププレート2と同様にその温度Tgと放射率から算出できる。放射率は1から図14に破線で示す透過率を引いた値である。前述同様これは、ガラス凸レンズ48を透過して減衰しQg1となり赤外線吸収膜43に吸収され熱となる。
【0097】
以上述べたように、調理中にサーモパイル25の検出する赤外線エネルギーは、1)調理鍋からのQn3の他に、2)トッププレート2からのQt2、3)視野筒19内壁からのQb2、4)結晶化ガラス光学フィルタ31からのQg1が重畳されたものであり、サーモパイル25はこの赤外線エネルギーに比例した電圧を生じる。そして、正確に鍋温度を検出するためには2),3),4)の赤外線エネルギーによる電圧を減算する必要がある。
【0098】
図17に本実施例における、各部の温度と各部が放射しサーモパイル25の赤外線吸収膜43に入射する赤外線エネルギー(図15に示すQn3,Qt2,Qb2,Qg1)(計算結果)の関係をまとめて示す。これは図13の分光放射エネルギーと各部材の透過特性(図14に示す)を用いて計算したものである。各部の温度は調理中に到達する温度範囲のみ図示している。
【0099】
調理中の各部材の代表的温度、例えば300℃の鍋(黒体)からの入射エネルギーを1とすると、200℃のトッププレートからのそれは1/6、80℃のセンサ視野筒からのそれは1/60、40℃の結晶化ガラス光学フィルタ31からのそれは1/60となる。鍋の放射率が例えば0.25となれば、前述鍋からの入射エネルギー1は1/4となり、他の部材からの入射エネルギーとあまりかわらなくなる。つまり、鍋温度検出に対する外乱として無視できなくなることがわかる。
【0100】
図18に鍋底として黒体を図3の実施例の赤外線透過窓5に置いた場合の、黒体温度Tnとサーモパイル温度検出回路72の出力端子72−2の出力電圧Vの関係を示す。黒体はトッププレートが加熱されない程度の短時間戴置した場合であり、視野筒19,結晶化ガラス光学フィルタ31の温度上昇もない。つまり、これは図15のQn3を電圧に変換したものである。
【0101】
常温から100℃まではほぼ0.5Vであり、100℃を越えると温度に比例した電圧が出力される。0.5Vはサーモパイル温度検出回路72の電源電圧(5V)を抵抗72−5,72−6,72−7で分圧した電圧(図10中a点で示す)0.5Vがオペアンプ72−1のバイアス電圧として与えてあるためである。100℃を越えるとサーモパイル25の出力電圧が大きくなり、オペアンプ72−1で約2000倍に増幅されて0.5V以上の電圧として観測される。このバイアス電圧はサーモパイル温度検出回路72の故障検出用に与えてある。出力端子72−2の出力電圧値からこの0.5Vを引いた値(0.5Vからの電圧上昇値)が検出した鍋底面温度に比例したものである。マイクロコンピュータ60はサーモパイル温度検出回路72の出力端子72−2の出力電圧をAD変換して読み込むが、この電圧から0.5Vを引いた値である鍋温度検出電圧Vt(=V−0.5)をもとに後述処理を行い鍋温度を得る。図18の関係は予めマイクロコンピュータ60のROMにテーブルデータTBLnとして記憶しておく。
【0102】
図19にトッププレート2のみを加熱したときのトッププレート温度Ttとサーモパイル温度検出回路72の出力端子72−2の出力電圧Vの関係を示す。但し前述の0.5Vを引いた値で示してある。鍋が置かれていないトッププレート2の赤外線透過窓5近傍を熱風で加熱した時のトッププレート温度Ttとサーモパイル温度検出回路72出力端子72−2の出力電圧の関係を示す。このとき、視野筒19,結晶化ガラス光学フィルタ31が加熱されないようにする。つまり、これは図15のQt2を電圧に変換したものである。図19の関係は予めマイクロコンピュータ60のROMにテーブルデータTBLtとして記憶しておく。
【0103】
図20に実施例のトッププレート2を取り外し、視野筒19に別途ヒータを巻きつけて独立に加熱した時のセンサ視野筒温度Tbとサーモパイル温度検出回路72出力端子72−2の出力電圧Vの関係を示す。(図では前述0.5Vを減算した値を示している。)このとき、結晶化ガラス光学フィルタ31が加熱されないようにする。つまり、これは図15のQb2を電圧に変換したものである。
【0104】
同様に鍋温度検出装置18を取り出し、ドライヤー等で結晶化ガラス光学フィルタ31を短時間加熱し、サーモパイル25等が加熱されないようにあるいはサーモパイル25の温度が変動しないときの結晶化ガラス光学フィルタ31の温度Tgとサーモパイル温度検出回路72の出力端子72−2の出力電圧Vの関係を示す。(図では前述0.5Vを減算した値を示している。)つまり、これは図15のQg1を電圧に変換したものである。この図20に示す二つの関係も予めマイクロコンピュータ60のROMにテーブルデータTBLbおよびTBLgとして記憶しておく。
【0105】
鍋温度検出装置18に内蔵される反射型フォトインタラプタ26を図6に示すように配置するとトッププレート2上に調理鍋がない場合、赤外線LED50の放射した赤外光(波長930nm)は大部分が結晶化ガラス光学フィルタ31およびトッププレート2を透過し赤外線フォトトランジスタ51には戻ってこない。しかし、一部は結晶化ガラス光学フィルタ31およびトッププレート2で反射される。これは結晶化ガラス光学フィルタ31およびトッププレート2の透過率が波長930nmで85%および90%であり、残り15%および10%の赤外光は反射されるためである。特に結晶化ガラス光学フィルタ31で反射される分はすぐ横にある赤外線フォトトランジスタ51に直接戻るため、本実施例では図6に示すように、反射型フォトインタラプタ26前面を結晶化ガラス光学フィルタ31下面に接するように配置してこの反射光が赤外線フォトトランジスタ51に入射するのを防止している。また、赤外線LEDの放射角度のため、トッププレート下面に到達せず経路途中にある物体(視野筒19内面)で反射される赤外光もある。
【0106】
このため、図21に示すように反射率検出回路73の出力は、トッププレート上に鍋がある場合(a)V1となり、鍋がない場合(b)V2となる。正味の鍋での反射電圧VrはVr=V2−V1となる。
【0107】
鍋温度検出装置18を図3に示すように配置し、それに内蔵する反射率検出回路73を用いて、トッププレート上に反射率が既知の金属板を配置したときの反射率検出回路73の出力から得られる先の反射電圧Vrと反射率の関係を図22に示す。図中に近似線も示す。この関係を用いれば、反射率検出回路73の出力電圧から反射率が得られる。そして、この関係をテーブルデータにあるいは近似式の係数値をあらかじめマイクロコンピュータ60のROMに記憶しておく。
【0108】
調理鍋のような金属物質ではキルヒホフの法則により温度Tの物質表面から放射される赤外線エネルギー(E=εσT4)の放射率εと表面の反射率ρの間にはε+ρ=1の関係が成立する(透過率α=0とする)。調理鍋では放射率の違いにより同じ鍋底温度でありながら、放射される赤外線エネルギーが異なる。このため、サーモパイル出力すなわち鍋温度検出装置18の出力が異なるという問題が生じる。そこで調理鍋底の反射率を検出して放射率を求め鍋温度検出装置18の出力を補正してから温度に換算する必要がある。これを行うために先に説明した反射率に相当する量である反射電圧Vrを求め、これから反射率を得るのが反射率検出回路73である。この反射率を1から引いて放射率を得る。
【0109】
図23にトッププレート2に置かれた数種の鍋について、鍋温度検出装置18の出力(サーモパイル温度検出回路72の出力V)から前述した0.5Vのオフセット電圧Voを引いた値Vt(鍋温度検出電圧)と鍋底面温度Tとの関係の一例を示す。図中に各鍋底面の放射率も示す。図23に示すように放射率によって鍋温度検出装置18の出力と鍋底温度の関係が異なることがわかる。図23の(a)で示す鍋は放射率が0.9と黒体に近い。(b)は放射率が0.57、(c)は0.43、(d)は0.24である。(b),(c),(d)の電圧値を放射率で除算すると、図中に破線でしめすものとなり、ほぼ1本の曲線に集約することができることが分かる。各出力Vtは各鍋の全放射エネルギー(E′=εσT4)に比例し、これを放射率で除算するのは、前述したように黒体の全放射エネルギー(E=σT4)に換算することを意味する。そして、各鍋の放射率が分かれば、各鍋の鍋温度を黒体の放射温度に還元できることを意味している。
【0110】
図24に、各鍋において放射温度計を用いて計測した放射率と図3で反射率検出回路73を用いて得た反射率(図22の関係の近似式を適用)の関係を示す。鍋によってキルヒホフの法則からはずれるものもあるが、放射率と反射率の間には強い相関がある。キルヒホフの法則から外れるのは反射率の検出において、鍋表面での散乱により反射赤外線の全てを受光していないためである。反射率を求める際には、赤外線LED50の放射光がトッププレート2になるべく垂直に入射させ、鍋での反射光をなるべく垂直に赤外線フォトトランジスタ51に導くのが望ましい。本実施例では鍋温度検出装置18内のサーモパイル25のトッププレート2上位置での視野面とこの反射率検出発光のトッププレート2上での反射面は同一面である。このため、図6に示すように鍋温度検出装置18内にサーモパイル25と反射型フォトインタラプタ26を並べて配置している。
【0111】
以下では、本実施例の動作について、手前右側の円表示4に調理鍋6を置き、所定温度で所定時間調理鍋を加熱して調理を行う場合として説明する。図25にこの動作のフローチャートを示す。図示していない電源を投入し、調理鍋6を置いた誘導加熱口の操作スイッチで所定の温度および調理時間を設定し(ステップS1)調理開始を指示すると(ステップS2)、マイクロコンピュータ60はまず反射率検出回路73を制御して載置された鍋の反射データ(反射率に相当)を取り込み反射率を検出する(ステップS3)。同時に加熱コイル7およびインバータ回路8等を冷却するため、図示しないファンを駆動してコイル上面冷却風路15a,コイル下面冷却風路15bおよび16a,16bに外気を導入する。
【0112】
反射率を検出するステップS3を図26に示すフローチャートを用いて詳細に説明する。マイクロコンピュータ60は反射率検出回路73の端子73−2にポートから図12(a)の赤外線LED駆動信号を出力する(ステップS3−1)。所定時間例えば200ms出力した後(ステップS3−2)、端子73−8に出力される電圧V2をAD端子より読み込む(ステップS3−3)。そして、赤外線LED駆動信号を停止する(ステップS3−4)。次に予め記憶されている鍋が置かれていない時の電圧V1を先に読み込んだ電圧V2から引き反射電圧Vrを算出する(ステップS3−5)。そして、予め記憶されている反射電圧と反射率の関係から反射率ρを得る(ステップS3−6)。
【0113】
ステップS3に続いて、電力制御回路62,周波数制御回路61,インバータ回路8を制御して加熱コイル7に電力を供給し誘導加熱を開始する(ステップS4)。加熱コイル7に電力が供給されると、加熱コイル7から誘導磁界が発せられ、トッププレート2上の調理鍋6が誘導加熱される。この誘導加熱によって調理鍋6の温度が上昇し、調理鍋6内の被加熱物の調理が開始される。マイクロコンピュータ60は誘導加熱を開始すると、一定時毎に鍋温度検出装置18の出力を読み込み、鍋温度を検出する(ステップS5)。
【0114】
ここで、鍋温度検出動作(ステップS5)を詳細に説明する。図27に鍋温度検出のフローチャートを示す。マイクロコンピュータ60は鍋温度検出装置18(サーモパイル温度検出回路72)の出力電圧Vを読み込み(ステップS5−1)、この値から0.5Vを引きこれを鍋温度検出電圧Vtとする(ステップS5−2)。
【0115】
同時にサーミスタ20a,20b,20cとサーミスタ温度算出回路74からトッププレート2,視野筒19,結晶化ガラス光学フィルタ31の温度T1a,T1b,T1cを読み込む(ステップS5−3)。そして、予めテーブルTBLtとして記憶してあるトッププレート温度Ttとサーモパイル温度検出回路72の出力の関係から、トッププレート2の温度T1aでの赤外線量電圧Vaを得る。同様にテーブルTBLbから視野筒19の温度T1bでの赤外線量電圧Vb,テーブルTBLgから結晶化ガラス光学フィルタ31の温度T1cでの赤外線量電圧Vcを得る(ステップS5−4)。(赤外線量算出手段の動作)続いて先の鍋温度検出電圧Vtから前記Va,Vb,Vcを減算する(ステップS5−5)。(減算手段の動作)この処理により外乱としてのトッププレート2,視野筒19,結晶化ガラス光学フィルタ31からの赤外線量を除去する。この減算後の電圧をVtとする。
【0116】
そして、誘導加熱直前に検出した反射率から、放射率(=1−反射率)を得て(ステップS5−6)、この減算後の鍋温度検出電圧Vtを除算する(ステップS5−7)(反射率補正の動作)。除算後のVtに前述V0=0.5Vを加算し、予めTBLnとして記憶してあるVnとTnの関係であるデータテーブルを引いて(ステップS5−8)、鍋温度に変換し鍋温度Tnを出力する(ステップS5−9)。
【0117】
なお、放射率を算出する過程(ステップS5−6)と鍋温度検出電圧Vtを放射率で除算する過程(ステップS5−7)の代わりに、予め倍率a=1/放射率(a=1/ε)の値(1以上の値になる)と反射率(あるいは反射電圧Vr)の関係をテーブルとして記憶し、反射率(あるいは反射電圧Vr)から前記テーブルで倍率aを得て、Vtに倍率を乗算したのち、VnとTnの関係であるデータテーブルTBLnを引いて鍋温度を出力してもよい。こうすれば、マイクロコンピュータの処理時間を要する除算を使用しなくてすみ処理の高速化が図れる。
【0118】
ステップS5で検出した温度が所定の温度に到達したら(ステップS6)、電力制御回路62を制御して加熱コイル7に供給する電流を所定量減少させる(ステップS7)。そして、調理時間タイマーをスタートさせる(ステップS8)。一定時毎の鍋温度検出(ステップS9)を続けながら(ステップS10)、加熱コイル7に供給する電流を所定量減増減させて(ステップS11,S12)、鍋温度を一定(Tc)に保つ。そして、所定の調理時間が経過したら(ステップS13)、調理終了をブザーで使用者に報知して、加熱コイル7への電力投入を停止する(ステップS14)。こうして、調理鍋6の被調理物は設定された温度および時間で調理される。
【0119】
以上の説明では反射率検出を誘導加熱直前に1度だけ行う例を示したがこれに限ることはない。通常の鍋では誘導加熱中(温度が高温になっても)反射率は変化しない。また、赤外線発光LEDでは長時間連続発光において寿命の問題がある。本説明ではこれらの点を考慮して1調理につき誘導加熱直前の1回の反射率検出に限定した。当然、発光電流を低減して調理中に一定周期で反射率検出を行っても良い。特に薄手の鍋では高温による鍋底変形で反射率が変化することもある。さらに、色塗装を底面に施した鍋では、高温で塗装が変性し反射率が変化することもある。この場合には加熱中でも定期的に反射率検出を行うのが望ましい。この場合当然磁場の影響を避けるために、実施例のように非磁性金属体で反射型フォトインタラプタ26および反射率検出回路73を囲うのが望ましい。
【0120】
また、調理中に鍋を別の鍋に交換する場合もある。この時反射率は当然変化する。この場合には今ある鍋を退かした時点で鍋温度検出装置18の検出する電圧が急激に低下する。そして、別温度の鍋を置いた時点で鍋温度検出装置18の検出する電圧はこの鍋底面温度に対応する値に復帰する。この変化を捉え再度反射率を検出するのが望ましい。
【0121】
なお、図20に示すように結晶化ガラス光学フィルタ31の温度が30℃よりも低い場合にはこれがサーモパイル25に与える赤外線量は鍋のそれに比べ一桁少ない。このため、鍋温度検出装置18が調理中十分に冷却できれば(鍋温度検出装置18の周囲温度を冷却風で30℃以下に維持できれば)前述のTBLgの省略およびステップS5−4,S5−5でのVcの算出,減算処理の省略ができることは明らかである。もちろんこの場合には、サーミスタ20cも省くことができる。
【実施例2】
【0122】
実施例1の図5では、視野筒19の温度を導光筒に設けたサーミスタ20bで検出した。図28にコイルベース10の裏面を示す。この実施例2では、加熱コイル7の裏面に設けたサーミスタ20dとトッププレート2下面に設けたサーミスタ20aで視野筒19の温度を検出する。前述したように視野筒19は誘導加熱された鍋からの放射熱と加熱コイル7のジュール発熱の伝熱で加熱される。このため、前記放射熱をトッププレート2の温度から推定し、伝熱を加熱コイル7の温度から推定する。そして、視野筒19の温度をサーミスタ20dとサーミスタ20aの荷重線形和として算出する。例えば、サーミスタ20aで検出する温度をT1aとし、サーミスタ20dで検出する温度をT1cとすればセンサ視野筒の温度T1bは、
T1b=k1×T1a+k2×T1c(k1,k2は定数) …(式1)
で表される。
【0123】
図28において、図5と同一符号は同一物を示す。本実施例の制御ブロック図は図9の制御ブロックにおけるサーミスタ20bをサーミスタ20dに置き換えたものとなるため省略する。
【0124】
この場合の鍋温度検出の処理を図29のフローチャートに示す。図29において図27の処理と同一符号は同一処理を示す。
【0125】
実施例2でのその他の動作は前述した実施例1と同様であるので説明を省略する。
【0126】
以上説明した誘導加熱調理器によれば、調理温度150から300℃の広い温度範囲において、鍋の材質,鍋底の形状,汚れの強弱によらず調理鍋6の加熱最高温度を正確に安定して検出でき、適切に加熱コイルへの高周波電力を制御することで最適な調理が可能となる。
【符号の説明】
【0127】
1 誘導加熱調理器の本体
2 トッププレート
3 操作表示部
4 調理鍋を置く位置を示す円表示
5 赤外線透過窓
6 調理鍋
7 加熱コイル
7a 第1のコイル
7b 第2のコイル
7c コイル間隙
7d 架橋線
8 インバータ回路
10 コイルベース
11 フェライト
14a 内空洞
14b 外空洞壁
15 コイル冷却風路
15a コイル上面冷却風路
15b コイル下面冷却風路
15c コイル上面冷却風送出孔
16 シール材
18 鍋温度検出装置
19 視野筒
20a サーミスタ(第1の温度検出手段)
20b サーミスタ(第2の温度検出手段)
20c サーミスタ(第3の温度検出手段)
21a 低電圧端子
21b 高電圧端子
25 サーモパイル
26 反射型フォトインタラプタ
27 電子回路基板
29 赤外線センサケース
30 ケース窓
31 結晶化ガラス光学フィルタ
32 金属ケース
33 外側赤外線センサケース
35 金属キャン
36 金属ステム
38 シリコン基材
39 シリコン酸化膜
40 ポリシリコン蒸着膜
41 アルミ蒸着膜
42 測温接点部
43 赤外線吸収膜
44 冷接点部
45 NTCサーミスタ
46 金属ピン
47 窓
48 ガラス凸レンズ
49 結晶化ガラス凸レンズ
50 赤外線LED
51 赤外線フォトトランジスタ
55 ヒートシンク
60 マイクロコンピュータ
61 周波数制御回路
62 電力制御回路
63 整流回路
64 電源スイッチ
68 操作スイッチ
69 表示回路
70 ブザー
72 サーモパイル温度検出回路
72−1,73−6 オペアンプ
72−9 抵抗
73 反射率検出回路
73−5 コンデンサ
73−7 充放電回路
【特許請求の範囲】
【請求項1】
調理容器を上面に置く結晶化ガラスからなるトッププレートと、
該トッププレートの下に設けられ、前記調理容器を加熱するために誘導磁界を発生させる加熱コイルと、
該加熱コイルの下に設けられ、前記調理容器などから放射される赤外線を検出する赤外線検出手段と、
前記加熱コイルの支持部に設けられ、前記加熱コイルから放射される赤外線を遮断し、前記調理容器から放射される赤外線を前記赤外線検出手段に導く導光筒と、
前記トッププレートの下面に配置されこの温度を検出する第1の温度検出手段と、
前記導光筒に配置されこの温度を検出する第2の温度検出手段と、
前記第1の温度検出手段の出力から前記トッププレートから放射される赤外線量を算出する第1の赤外線量算出手段と、
前記第2の温度検出手段の出力から前記導光筒から放射される赤外線量を算出する第2の赤外線量算出手段と、
前記赤外線検出手段の出力から、前記第1及び第2の赤外線量算出手段の出力を減算する減算手段と、
前記加熱コイルへ高周波電力を供給する高周波電力供給手段と、
該高周波電力供給手段の出力電力を制御する電力制御手段と、
前記減算手段の出力より前記調理容器の底面の温度を検出する調理容器温度検出手段と、を備えており、
該調理容器温度検出手段の出力に基づいて前記加熱コイルへの供給電力を制御することを特徴とする誘導加熱調理器。
【請求項2】
請求項1に記載の誘導加熱調理器において、
前記第1の温度検出手段を前記導光筒の上開口部外側近傍の前記トッププレート下面に設けたことを特徴とする誘導加熱調理器。
【請求項3】
請求項1に記載の誘導加熱調理器において、
前記第2の温度検出手段を、前記導光筒の外壁、あるいは内壁温度を検出するように外壁から内壁側に挿入して内壁直近に配置したことを特徴とする誘導加熱調理器。
【請求項4】
調理容器を上面に置く結晶化ガラスからなるトッププレートと、
該トッププレートの下に設けられ、前記調理容器を加熱するために誘導磁界を発生させる加熱コイルと、
該加熱コイルの下に設けられ、前記調理容器などから放射される赤外線を検出する赤外線検出手段と、
前記加熱コイルの支持部に設けられ、前記加熱コイルから放射される赤外線を遮断し、前記調理容器から放射される赤外線を前記赤外線検出手段に導く導光筒と、
前記トッププレートの下面に配置されこの温度を検出する第1の温度検出手段と、
前記加熱コイルに配置されこの温度を検出する第2の温度検出手段と、
前記第1の温度検出手段の出力から前記トッププレートから放射される赤外線量を算出する第1の赤外線量算出手段と、
前記第1の温度検出手段の出力と前記第2の温度検出手段の出力から前記導光筒から放射される赤外線量を算出する第2の赤外線量算出手段と、
前記赤外線検出手段の出力から、前記第1及び第2の赤外線量算出手段の出力を減算する減算手段と、
前記加熱コイルへ高周波電力を供給する高周波電力供給手段と、
該高周波電力供給手段の出力電力を制御する電力制御手段と、
前記減算手段の出力より前記調理容器の底面の温度を検出する調理容器温度検出手段と、を備えており、
該調理容器温度検出手段の出力に基づいて前記加熱コイルへの供給電力を制御することを特徴とする誘導加熱調理器。
【請求項5】
請求項4に記載の誘導加熱調理器において、
前記第1の温度検出手段を前記導光筒の上開口部外側近傍の前記トッププレート下面に設け、前記第2の温度検出手段を前記導光筒の外側近傍に位置する加熱コイルに設けたことを特徴とする誘導加熱調理器。
【請求項6】
調理容器を上面に置く結晶化ガラスからなるトッププレートと、
該トッププレートの下に設けられ、前記調理容器を加熱するために誘導磁界を発生させる加熱コイルと、
該加熱コイルの下に設けられ、前記調理容器などから放射される赤外線を検出し、赤外線受光前面に前記トッププレートと同一光学特性を有する窓材を持つ赤外線検出手段と、
前記加熱コイルの支持部に設けられ、前記加熱コイルから放射される赤外線を遮断し、前記調理容器から放射される赤外線を前記赤外線検出手段に導く導光筒と、
前記トッププレートの下面に配置されこの温度を検出する第1の温度検出手段と、
前記導光筒に配置されこの温度を検出する第2の温度検出手段と、
前記窓材に配置されこの温度を検出する第3の温度検出手段と、
前記第1の温度検出手段の出力から前記トッププレートから放射される赤外線量を算出する第1の赤外線量算出手段と、
前記第2の温度検出手段の出力から前記導光筒から放射される赤外線量を算出する第2の赤外線量算出手段と、
前記第3の温度検出手段の出力から前記窓材から放射される赤外線量を算出する第3の赤外線量算出手段と、
前記赤外線検出手段の出力から、前記第1及び第2及び第3の赤外線量算出手段の出力を減算する減算手段と、
前記加熱コイルへ高周波電力を供給する高周波電力供給手段と、
該高周波電力供給手段の出力電力を制御する電力制御手段と、
前記減算手段の出力より前記調理容器の底面の温度を検出する調理容器温度検出手段と、を備えており、
前記調理容器温度検出手段の出力に基づいて前記加熱コイルへの供給電力を制御することを特徴とする誘導加熱調理器。
【請求項1】
調理容器を上面に置く結晶化ガラスからなるトッププレートと、
該トッププレートの下に設けられ、前記調理容器を加熱するために誘導磁界を発生させる加熱コイルと、
該加熱コイルの下に設けられ、前記調理容器などから放射される赤外線を検出する赤外線検出手段と、
前記加熱コイルの支持部に設けられ、前記加熱コイルから放射される赤外線を遮断し、前記調理容器から放射される赤外線を前記赤外線検出手段に導く導光筒と、
前記トッププレートの下面に配置されこの温度を検出する第1の温度検出手段と、
前記導光筒に配置されこの温度を検出する第2の温度検出手段と、
前記第1の温度検出手段の出力から前記トッププレートから放射される赤外線量を算出する第1の赤外線量算出手段と、
前記第2の温度検出手段の出力から前記導光筒から放射される赤外線量を算出する第2の赤外線量算出手段と、
前記赤外線検出手段の出力から、前記第1及び第2の赤外線量算出手段の出力を減算する減算手段と、
前記加熱コイルへ高周波電力を供給する高周波電力供給手段と、
該高周波電力供給手段の出力電力を制御する電力制御手段と、
前記減算手段の出力より前記調理容器の底面の温度を検出する調理容器温度検出手段と、を備えており、
該調理容器温度検出手段の出力に基づいて前記加熱コイルへの供給電力を制御することを特徴とする誘導加熱調理器。
【請求項2】
請求項1に記載の誘導加熱調理器において、
前記第1の温度検出手段を前記導光筒の上開口部外側近傍の前記トッププレート下面に設けたことを特徴とする誘導加熱調理器。
【請求項3】
請求項1に記載の誘導加熱調理器において、
前記第2の温度検出手段を、前記導光筒の外壁、あるいは内壁温度を検出するように外壁から内壁側に挿入して内壁直近に配置したことを特徴とする誘導加熱調理器。
【請求項4】
調理容器を上面に置く結晶化ガラスからなるトッププレートと、
該トッププレートの下に設けられ、前記調理容器を加熱するために誘導磁界を発生させる加熱コイルと、
該加熱コイルの下に設けられ、前記調理容器などから放射される赤外線を検出する赤外線検出手段と、
前記加熱コイルの支持部に設けられ、前記加熱コイルから放射される赤外線を遮断し、前記調理容器から放射される赤外線を前記赤外線検出手段に導く導光筒と、
前記トッププレートの下面に配置されこの温度を検出する第1の温度検出手段と、
前記加熱コイルに配置されこの温度を検出する第2の温度検出手段と、
前記第1の温度検出手段の出力から前記トッププレートから放射される赤外線量を算出する第1の赤外線量算出手段と、
前記第1の温度検出手段の出力と前記第2の温度検出手段の出力から前記導光筒から放射される赤外線量を算出する第2の赤外線量算出手段と、
前記赤外線検出手段の出力から、前記第1及び第2の赤外線量算出手段の出力を減算する減算手段と、
前記加熱コイルへ高周波電力を供給する高周波電力供給手段と、
該高周波電力供給手段の出力電力を制御する電力制御手段と、
前記減算手段の出力より前記調理容器の底面の温度を検出する調理容器温度検出手段と、を備えており、
該調理容器温度検出手段の出力に基づいて前記加熱コイルへの供給電力を制御することを特徴とする誘導加熱調理器。
【請求項5】
請求項4に記載の誘導加熱調理器において、
前記第1の温度検出手段を前記導光筒の上開口部外側近傍の前記トッププレート下面に設け、前記第2の温度検出手段を前記導光筒の外側近傍に位置する加熱コイルに設けたことを特徴とする誘導加熱調理器。
【請求項6】
調理容器を上面に置く結晶化ガラスからなるトッププレートと、
該トッププレートの下に設けられ、前記調理容器を加熱するために誘導磁界を発生させる加熱コイルと、
該加熱コイルの下に設けられ、前記調理容器などから放射される赤外線を検出し、赤外線受光前面に前記トッププレートと同一光学特性を有する窓材を持つ赤外線検出手段と、
前記加熱コイルの支持部に設けられ、前記加熱コイルから放射される赤外線を遮断し、前記調理容器から放射される赤外線を前記赤外線検出手段に導く導光筒と、
前記トッププレートの下面に配置されこの温度を検出する第1の温度検出手段と、
前記導光筒に配置されこの温度を検出する第2の温度検出手段と、
前記窓材に配置されこの温度を検出する第3の温度検出手段と、
前記第1の温度検出手段の出力から前記トッププレートから放射される赤外線量を算出する第1の赤外線量算出手段と、
前記第2の温度検出手段の出力から前記導光筒から放射される赤外線量を算出する第2の赤外線量算出手段と、
前記第3の温度検出手段の出力から前記窓材から放射される赤外線量を算出する第3の赤外線量算出手段と、
前記赤外線検出手段の出力から、前記第1及び第2及び第3の赤外線量算出手段の出力を減算する減算手段と、
前記加熱コイルへ高周波電力を供給する高周波電力供給手段と、
該高周波電力供給手段の出力電力を制御する電力制御手段と、
前記減算手段の出力より前記調理容器の底面の温度を検出する調理容器温度検出手段と、を備えており、
前記調理容器温度検出手段の出力に基づいて前記加熱コイルへの供給電力を制御することを特徴とする誘導加熱調理器。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】

【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2011−228147(P2011−228147A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−97486(P2010−97486)
【出願日】平成22年4月21日(2010.4.21)
【出願人】(399048917)日立アプライアンス株式会社 (3,043)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月21日(2010.4.21)
【出願人】(399048917)日立アプライアンス株式会社 (3,043)
【Fターム(参考)】
[ Back to top ]