
誘導放射線療法システム
【課題】体の中の腫瘍のようなターゲットの位置を正確に確認し、追跡するためのシステム及び方法の提供。
【解決手段】ターゲットの中に又は近くに位置決め可能な信号を生じさせる外部例示ビーコンと、そのビーコンを遠隔操作により励磁させて、認識可能な信号を生じさせる外部励磁源と、互いに既知の幾何学的形体で間隔を隔てられた複数のセンサとを有する。コンピュータが、センサーに接続され、ビーコンの測定値を使用して、ターゲット内部のターゲットアイソセンタを識別するように形成される。コンピュータは、ターゲットアイソセンタの位置とマシンアイソセンタの位置とを比較する。コンピュータはまた、放射線治療前及びその間、ターゲットアイソセンタがマシンアイソセンタと一致するように、患者及び患者の支持装置の移動を制御する。
【解決手段】ターゲットの中に又は近くに位置決め可能な信号を生じさせる外部例示ビーコンと、そのビーコンを遠隔操作により励磁させて、認識可能な信号を生じさせる外部励磁源と、互いに既知の幾何学的形体で間隔を隔てられた複数のセンサとを有する。コンピュータが、センサーに接続され、ビーコンの測定値を使用して、ターゲット内部のターゲットアイソセンタを識別するように形成される。コンピュータは、ターゲットアイソセンタの位置とマシンアイソセンタの位置とを比較する。コンピュータはまた、放射線治療前及びその間、ターゲットアイソセンタがマシンアイソセンタと一致するように、患者及び患者の支持装置の移動を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、概略的に放射線療法装置に関し、より詳細には、誘導放射線療法が施される体内のターゲットを正確に位置確認し、且つ追跡するための装置及び方法に関する。
【背景技術】
【0002】
放射線療法における最近の進歩は、限局性癌の効果的な治療の新しい達成方法を提供している。これらは、三次元等角外部ビーム放射、強度調整放射線療法(IMRT,intensity modulated radiation therapy)、及び、定位X線撮影法及び小線源治療を含む。これらの新しい物理治療法は、より多くの線量の放射線を腫瘍に送出し、その多くの線量は、標準の外部ビーム放射線療法と比較したときに、それらの高い有効性の源泉である。
【0003】
放射線療法を用いた限局癌の管理の継続した改善を達成するために、放射線療法に対して線量応答関係がほとんどの癌について存在するから、更なる線量の漸増が必要である。しかしながら、送出する放射線の線量が増加すれば、照射される隣接した正常組織の量を減じる対策が講じられない限り、健常組織に対する合併症の可能性が増加する。有効な放射線療法は、放射線の全線量と、腫瘍の周りの照射された正常組織の体積の両方に依存する。したがって、放射線の線量を増やすと、有効な放射線治療の均等割合を保つために、照射される隣接した正常組織の量を減らさなければならない。
【0004】
照射される隣接した正常組織の量を減ずるために、処方した放射線の十分な線量を受けるターゲットの周りの健常組織の領域である窮屈な治療マージンと共にターゲットに放射線を処方しなければならない。例えば、前立腺癌のための治療マージンが広すぎれば、そのマージンは多少の直腸、膀胱及び球状の尿道組織を含む。これらの重要な組織を含まないマージンを提供することが非常に望ましい。
【0005】
治療マージンが全く無いことが理想である。しかしながら、既存の装置による初期の放射線療法のセットアップ及び放出中の日々の変化のために、多少のマージンは必要である。マージンはまた、患者の外部分が不動のままのときでさえ起こることがある、患者の体内でのターゲットの潜在的な内部移動に適応するために必要であった。放射線療法中、前立腺内の腫瘍の移動が主として患者の呼吸により、また直腸及び膀胱の自然な充満及び排泄により起こることを幾つかの研究が立証し、計量した。多少の治療マージンがないと、腫瘍そのものが治療体積の外に移動する可能性がある。
【0006】
さらに、放射線ビームが最初からターゲットを外れるように患者がセットアップされるならば、或いは、治療中ターゲットが移動すれば、ビームはより多くの正常組織に当たり、正常組織の付随的な損傷を増大させ、並びに、ターゲットの線量を潜在的に不足させる。正常組織の付随的な損傷をできるだけ防止することが非常に望ましい。かくして、現在の患者のセットアップ操作で線量漸増が試みられるとき、放射線治療のセットアップ及びターゲットの移動の日々刻々の変化、及びターゲットの移動が、重大な挑戦を提起する。
【0007】
現在の患者のセットアップ操作は、患者の身体上の外部基準マークと、放射線放出装置用の視覚的な整合誘導との整合に頼っている。一例として、X線装置、コンピュータ断層撮影(computerized tomography,CT)装置、核磁気共鳴画像(magnetic resonance imaging,MRI)装置、又は超音波装置のような、映像装置を用いて、患者の体内の腫瘍を確認する。体内の腫瘍の近似位置が、患者の体の外部の二つ以上の整合点と整合され、整合点を示すために、外部マークが患者の皮膚に書かれる。
【0008】
放射線治療のための患者セットアップ中、外部マークが、放射線放出装置の基準システムと整合される。このセットアップ操作は、マシンアイソセンタとして知られた、体内の治療ターゲット(又は患者)のアイソセンタを、放射線ビームを合焦させる空間内の位置に正確に位置決めしようとする。治療ターゲットをマシンアイソセンタに関して正確に位置決めすることによって、体内の患者有効治療体積が、放射線療法の治療計画位置に正確に登録(又は位置決め)される。しかしながら、ターゲットが外部のマークに対して移動したらならば、外部の整合装置及びマークが適正に整合されても、ターゲットがマシンアイソセンタからずれてしまう。したがって、医者及び技術者は、ターゲットがマシンアイソセンタに対して実際にどの程度移動したのか分からない。一例として、研究が、連続した二日間で1.6cmに達するターゲットの変位を証明した。患者の呼吸及び鼓動のため、非常に短時間での肺腫瘍の実質的なターゲットの変位も証明された。かかるターゲットの内部移動は、治療の放出における不正確さを引き起こすことがあり、そのため、健常組織の広いマージンが、ありそうな内部ターゲット運動を補償するように処方され、且つ照射される。
【発明の開示】
【課題を解決するための手段】
【0009】
本発明の一つの側面では、放射線療法のための準備中及び放射線療法中に、体内のターゲットの実際の位置を正確に位置確認し、且つ追跡するためのシステム及び方法を提供する。一つの実施形態では、ターゲットが放射線送出源のマシンアイソセンタに位置決めされるときに、システムを、選択された線量の放射線を体内のターゲットに送出する放射線送出源と一緒に使用することができる。システムは、ターゲット内又はその上のように、ターゲットに対して選択された位置で、体内に又はその上に固定できるマーカーを有する。マーカーは、体内又は体の上に取り付けられながら識別可能な信号を生じさせるように、外部励磁源によって励磁できる。複数のセンサーを有するセンサーアレイが体の外に設けられ、センサーは互いに対して知られた幾何学的関係で間隔を隔てられる。
【0010】
データ演算ユニットが、センサーアレイに連結され、センサーによる測定値を使用して、マーカーの実際の位置と、センサーに対するターゲット内のターゲットアイソセンタを決定するように構成される。基準マーカーも、装置のマシンアイソセンタに対して既知の位置で、放射線放出装置に連結される。基準マーカーは、センサーアレイに対して基準マーカーの位置及びマシンアイソセンタを決定するための測定可能な信号を出す。データ演算ユニットは、ターゲットアイソセンタの位置と、マシンアイソセンタの位置とをリアルタイムで比較して、患者が、放射線療法にとって適正にセットアップされたか否かを決定する。
【0011】
本発明の別の側面では、監視システムが、データ演算ユニットに連結され、マシンアイソセンタに対するターゲットアイソセンタの実際の位置についてのフィードバック情報を提供するように形成されたフィードバック部分を有する。一つの実施形態では、フィードバック部分は、マシンアイソセンタ及びターゲットアイソセンタの互いに位置の視覚的及び/又は数値的な表示を提供する。次いで、この表示を、治療前に又は治療中にターゲットアイソセンタの位置を調節するのに使用することができる。別の実施形態では、フィードバック部分は、マシンアイソセンタに対してターゲットアイソセンタの軸時間の移動の視覚的な及び又は数値的な表示を提供する。さらに、フィードバックデータを、許容限度を超えた患者又はターゲットの移動をオペレータに自動的に警告するのに使用することができる。第三の実施形態では、フィードバックデータを使用して、正常な(即ち、呼吸)又は計画されていない患者の動きに対して、放射線療法の治療を自動的に調節し、制御し(gate)、又は停止することができる。
【0012】
本発明の別の側面では、調節可能な患者支持組立体を、追跡監視システムと組み合わせて、放射線放出システムと一緒に使用する。支持組立体は、ベースと、そのベースに移動可能に取り付けた支持構造体と、ベースに対して支持構造体を選択的に移動させるために支持構造体に連結された移動制御装置と、を有する。互いから間隔を隔てられた複数のセンサーは、ベースに対して一定位置でベースに連結される。データ演算ユニットは、センサーに連結され、ターゲット内の又はその直ぐ近くの一つ以上のマーカーからの信号測定データを受ける。データ演算ユニットは、各マーカーについて信号測定データを使用して、ターゲット内のマーカー及びターゲットアイソセンタの正確な位置を決定するように構成される。データ演算ユニットは、マシンアイソセンタに対してターゲットアイソセンタの位置を識別するように形成される。移動制御装置は、データ演算ユニットに連結され、そのデータ演算ユニットからのデータに応答してターゲットアイソセンタをマシンアイソセンタと一致して位置決めするようになっている。
【0013】
本発明の別の側面では、方法が、放射線治療を体内の選択されたターゲットに施すために提供される。本方法は、励磁可能なマーカーを、ターゲットに対して選択された位置に位置決めし、埋め込んだマーカーを体の外の励磁源で励磁して、識別可能なマーカー信号を生じさせ、そして、互いに対して既知の幾何学的形態に位置決めされた、体の外の複数のセンサーでマーカーからのマーカー信号を測定する。本方法はまた、センサーからのマーカー信号の測定値に基づいてセンサーに対する体内のマーカーの位置及びターゲットアイソセンタを決定することを含む。さらに、本方法は、センサー及びターゲットアイソセンタに対する放射線放出組立体のマシンアイソセンタの位置を決定し、ターゲットアイソセンタとマシンアイソセンタとが一致するように、放射線放出装置に対して体を位置決めすることを含む。次いで、放射線療法は、放射線放出装置からターゲットアイソセンタを中心にした治療体積まで送出される。
【0014】
本発明の更に別の側面では、放射線療法を体内のターゲットアイソセンタのところで治療体積に施すために、放射線放出装置に対して体を位置決めするための方法が提供される。体はその中に選択されたターゲットを有し、少なくとも一つの励磁可能なマーカーがターゲットに対して既知の位置に位置決めされる。本方法は、複数のセンサーに隣接した可動支持組立体上で体を位置決めすること、及び、体外の励磁源で励磁マーカーを賦勢することを含む。励磁されたマーカーは、識別可能なマーカー信号を出す。マーカー信号は、体の外で、互いに対して、且つ可動支持組立体に対して既知の幾何学的形態に配置された複数のセンサー測定される。治療体積内のマーカー及びターゲットアイソセンタの位置は、センサーによるマーカー信号の測定に基づいて決定される。ターゲットアイソセンタの位置も、複数のセンサー及び機械アイソセンサーに対して決定される。ターゲットアイソセンタの位置とマシンアイソセンタの位置とを比較して、二つのアイソセンタが互いに一致しなければ、支持組立体の部分が、ターゲットアイソセンタとマシンアイソセンタとを一致させるように、体及びターゲットを移動させる。
【図面の簡単な説明】
【0015】
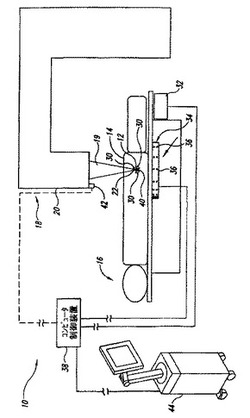
【図1】本発明の実施形態によるターゲットの探出し及び監視システムの概略側面図である。励磁性のマーカーは、患者の体内のターゲット内に又はターゲットに近接して埋め込まれて示され、センサーアレイは、患者の外に示され、放射線放出装置は、体内のターゲットに放射線療法を施す位置に示されている。
【図2】可動支持台上の患者の概略平面図であり、埋め込まれたマーカー、ターゲット及びセンサーアレイを隠れ線で示す。
【図3】図1に示したシステムに使用可能な単一軸マーカーの一実施形態の拡大側面図である。
【図4】図1のシステムに使用可能な三軸マーカーの一実施形態の拡大側面図である。
【図5】図1のシステムに使用可能な三軸マーカーの他の実施形態の拡大等角図である。
【図6】ターゲット、そのターゲット内に又はそのターゲットの近くに埋め込まれた三つのマーカー、外部励磁源、センサーアレイ、及び、図1のシステムにおけるコンピュータ制御装置の拡大部分概略図である。
【図7】図1のシステムにおけるセンサーアレイの別の実施形態の概略等角図である。
【図8】二つのセンサーに対するマーカーの位置を決定するためのデータを表す、二つの交差する球の幾何学的な表示である。
【図9】四つのセンサーに対するマーカーの位置を決定するためのデータを表す、四つの交差する球の幾何学的な表示である。
【図10】第一の位置に仮想線で示され、体内の異なる位置である第二の位置に実践で示される、体内のターゲットの概略等角図である。
【図11】表示画面上に仮想線で示された模擬ターゲット、模擬マーカー、及び模擬ターゲットアイソセンタ、及び、表示画面上に実線で示された実際のマーカー位置及びターゲットアイソセンタ位置を示す、図1の監視システムの拡大等角図である。
【図12】模擬ターゲット及び実際のターゲットが互いに整合して示され、マシンアイソセンタとターゲットアイソセンタが互いに一致した、図11の監視システムの等角図である。
【図13】監視システム上に示されたターゲット及びマーカーの模擬等角図であり、ターゲットは、第一ターゲット条件で示されている。
【図14】ターゲットがターゲットの大きさ及びマーカーに対して条件の変化を表す第二条件で示されている、図13のターゲット及びマーカーの模擬等角図である。
【図15】表面マーカーが、互いに且つターゲットと整合して、患者の体の外面に取り付けられた、本発明の別の実施形態の側面図である。
【図16】図15の表面取付マーカーを取り付けた患者の全部の平面図である。
【図17】図1のシステムを利用して、放射線療法をターゲットに施すための放射線放出操作の概略フロー図である。
【発明を実施するための最良の形態】
【0016】
図1乃至図17は、本発明の実施形態による、体内のターゲットを位置確認し、追跡し、且つ監視するためのシステム及び幾つかの構成要素を示す。システム及び構成要素は、誘導放射線療法のような、選択された治療をターゲットに適用するために、ターゲットを位置確認し、追跡し、監視し、そして評価するのに使用できる。図1乃至図17を参照して以下に説明する構成要素の幾つかも、本発明の側面による方法を実施するためのシステムに使用することができる。したがって、種々の図に亘って、同じ参照番号は同じ構成要素及び特徴を指す。
【0017】
図1及び図2を参照すると、本発明の一つの側面は、誘導放射線療法を、患者16の体14の中の腫瘍のようなターゲット12に施す際に使用できるように構成されたシステム10を提供する。このシステム10により、電離放射線療法を放射線送出源18からターゲットに送出しながら、ターゲット12を患者の体14の中で位置確認し、実際の位置をリアルタイムで監視する。呼吸、器官の充満及び排出、又は他の内部運動のため、ターゲット12は体14の中で移動する。放射線ビームに対してターゲットの運動を追跡し、監視して、ターゲット12への放射線の正確な照射、及び、必要であれば、ターゲットの周りの最小のマージンだけを保証する。本システム10は、腫瘍又は他のターゲットに関する放射線のための誘導放射線療法と関連して以下に説明されるけれども、本システムは、例えば、他の治療目的の又は診断目的で、体内の他のターゲットを追跡し、且つ監視するのに使用することができる。
【0018】
図示した実施形態(図1)の放射線送出源18は線形加速器として知られた電離放射線装置であるが、いかなる放射線療法放出装置でもよい。カリフォルニア州パロアルト(Palo Alto)のバリアン・メディカル・システムズ社(Varian Medical Systems, Inc.)、ニュージャージー州イセリン(Iselin)のシーマンス・メディカル・システムズ社(Siemans Medical Systems Inc.)、ニュージャージー州イセリンのエレクタ・インスツルメンツ社(Electa Instruments, Inc.)、又は、日本の三菱電機株式会社によって製造されたこのような装置を含む他の放射線療法放出装置を使用することができる。このような装置は、在来の単部門又は多部門放射線療法、3D等角放射線療法(3D CRT、3D conformal radiation therapy)、逆変調放射線療法(IMRT、inverse modulated radiation therapy)、定位放射線療法(stereotactic radiotherapy)、トモセラピー(tomo therapy)を果たすのに使用される。これは、種々の治療計画ソフトウエアシステムと関連して行われる。
【0019】
放射線送出源18は、ゲートで制御され或いは形成された電離放射線ビーム19を、可動ガントリー20から、ガントリーから離れた位置の点を基準とした領域又は体積に送出する。マシンアイソセンタ22と称される空間内のこの点は、電離放射線19を、産業標準治療計画手順によって決定されるように形成する点である。電離放射線がターゲットに正確に送出されるように、システム10により、ターゲット12をマシンアイソセンタ22に対して正確に位置決めさせることができる。システムによりまた、ターゲットを取り囲む健常組織の付帯的な損傷を最小にするように、放射線療法中、マシンアイソセンタに対するターゲットの実際の位置を監視させることができる。
【0020】
図示したシステム10は、ターゲット12内に又はターゲット12に隣接して位置し、体内のターゲットの実際の位置をマークする、複数のマーカー30を有する。したがって、マーカー30は、体30内、体上又は体30近くのマーカーである。一例では、マーカー30を、治療アイソセンタに対する既知の位置で、患者固定装置に取り付けるのがよい。マーカー30は、患者の体14の外部に位置決めされた励磁源32によって、賦勢され、或いは励磁される。マーカー30が励磁されると、マーカー30は、各々、選択された特有の周波数で共鳴し、体14の外から測定可能な低エネルギーの無線周波数磁気信号を発生させる。マーカー30からの信号は、患者の体14の外部に置かれたセンサー36のアレイ34によって検出され、且つ測定される。センサー36は、互いに対して、一定の選択された幾何学的形態に配置され、その結果、アレイ34は、位置及び運動が計算される一定の基準座標形を構成する。センサー36は、各センサー36から測定情報を受け、且つそのセンサーに対して患者の体14の中のマーカー30の実際の位置を決定するコンピュータ制御装置38に作動的に連結される。
【0021】
一実施形態では、コンピュータ制御装置38は、共鳴するマーカーからセンサー36による信号測定値に基づいて、ターゲット12内のターゲットアイソセンタ40の位置を定め、これを決定するのに使用されるアルゴリズムを有する。他の実施形態では、ターゲット12内のターゲットアイソセンタ40の位置が選択され、コンピュータ制御装置38は、選択されたターゲットアイソセンタに対する各マーカー30の位置及び/又は向きについての位置情報を利用する。ターゲットアイソセンタ40は、治療計画手順によって決定された通り、成形された放射線線量が配置され又は差し向けられる点又は位置である。一つの実施形態では、センサ36は、センサアレイ34に対して患者の体14の中のターゲットアイソセンタ40の実際の位置を追跡するために、毎分12回以上ポーリングされる。したがって、患者がセンサアレイ34に隣接して位置決めされると、ターゲット12及びターゲットアイソセンタ40の実際の位置をリアルタイムで監視することができる。
【0022】
ターゲットアイソセンタ40の実際の位置は、センサアレイ34に対するマシンアイソセンタ22の位置と比較される。図示したシステム10は、線形加速器のガントリー20に、又は他の実施形態で使用される放射線療法放出装置の他の選択された位置に位置決めされた基準デバイスを有する。これらの他の実施形態では、他の放射線療法放出装置は、コバルト機械(cobalt machines)、ガンマナイフ(Gamma Knife)、サイバーナイフ(cyberknife)、専門ステレオ定位放射線療法装置(specialized stereostatic radiotherapy devices)、又は、(CTスキャナーに線形加速器を利用する)断層CT組立体(TomoCT assembly)を含む。基準装置42は、マシンアイソセンタ22に対して既知の空間的又は幾何学的関係に位置決めされる。一つの実施形態における基準装置42は、アレイ34のセンサ36によって検出できる測定可能な信号を出す、共鳴する三軸の単一周波数マーカーである。他の実施形態では、基準装置42を、ガントリー20から離れた遠隔位置に配置することができる。いずれの実施形態でも、センサアレイ34に対する基準装置42の位置を決定するときに、センサアレイに対するマシンアイソセンタ22の位置を計算することができる。センサー36は、基準装置42に付いての測定データをコンピュータ制御装置38に与え、コンピュータ制御装置は、センサアレイ34に対するマシンアイソセンタ22の位置を計算する。
【0023】
センサアレイ34に対するターゲットアイソセンタ40の位置は、センサアレイに対するマシンアイソセンタ22の位置と比較される。ターゲットアイソセンタ40及びマシンアイソセンタ22が空間的に不整合であり、二つのアイソセンタが互いに三次元的に一致しなければ、患者16及び又はターゲット12を、マシンアイソセンタ22に対して移動させることができる。ターゲット12の位置は、ターゲットアイソセンタ40がマシンアイソセンタ22と一致するまで移動される。一旦、ターゲットアイソセンタ40及びマシンアイソセンタ22が許容可能に整合されると、放射線送出源18を作動して、ターゲットアイソセンタを基準とする電離放射線ビーム19を出し、それによって、ターゲット12を取り囲む健常組織に対して付帯的な損傷を最小にし、或いは排除しながら、ターゲットに放射線療法計画に従って照射することができる。ターゲットアイソセンタがマシンアイソセンタ22に対して許容できない量移動しないようにし、且つ、ターゲットアイソセンタとマシンアイソセンタとが許容変位限度内であるときに治療できるように、ターゲットアイソセンタ40の実際の位置も、放射線療法中、リアルタイムで監視することができる。
【0024】
図示した実施形態では、システム10も、フィードバックデータを、システム及び/又は放射線放出装置18を操作する医師又は技師のためのユーザーインターフェイスに与える、コンピュータ制御装置38に連結された監視組立体44を有する。一例として、監視組立体44は、フィードバックデータを、患者が放射線療法のためにセットアップされ、且つ位置決めされているときに、リアルタイムで、マシンアイソセンタの位置に対する三次元空間内のターゲットアイソセンタの位置の視覚的な表示として与える。監視組立体44はまた、例えば、セットアップ完了の確認、図形情報、患者情報、放射線療法計画の情報、又は誘導放射線療法の工程中に利用可能な他の情報を有する他のフィードバックデータをユーザインタフェースに与えることができる。
【0025】
図3乃至図5は、システム10で使用可能な、他の実施形態の励磁可能なマーカー30を示す。図3に示すマーカー30の一つは、導電性巻き線48によって包まれたフェライトコア46を有する埋め込み可能な単一軸の共鳴マーカー31であり、巻き線は小さいコンデンサー50に接続される。マーカー31は、電磁界を発生させる外部励磁源32によって賦勢されるように構成される。この電磁界により、マーカー31を所定の周波数で共鳴させ、それによって、体の外側からセンサー36(図1参照)によって測定されるのに十分な強度の信号を出す。患者に永久的に埋め込むことができる小さい自給式のワイヤレスの励磁可能なマーカー31を提供するために、生物学的に不活性な被覆52がフェライトコア46、巻き線48及びコンデンサー50を包む。この実施形態では、マーカー31は、マーカー信号の発生又は通信のための外部のエネルギー源とワイヤーを介して物理的に接続される必要がないから、マーカー31は「ワイヤレス」である。一つの実施形態では、マーカー31は、約5mmにすぎない長さ、及び、アプリケーター針に嵌るように寸法決めされた直径を有する。他の実施形態では、マーカー31は、マーカー信号の好ましい形成のために、必要に応じて異なる寸法を有することができる。
【0026】
図4に最も良く示すように、別の或る励磁マーカー30は、三つのシグナル部分54を有する、三軸のワイヤレス共鳴マーカー52からなる。各シグナル部分54は、他の二つのシグナル部分と垂直な軸線方向に位置決めされる。したがって、三つのシグナル部分54は、X、Y、Z基準座標系を構成する。シグナル部分54の各々は、フェライトコア46と、フェライトコア46の周わりの巻き線48と、各巻き線に接続された小さいコンデンサー50と、を有する。各シグナル部分は、外部励磁源32によって賦勢され、他の二つのシグナル部分の共鳴周波数と異なる周波数で共鳴するように形成される。
【0027】
一つの実施形態では、図4に示すように、三軸マーカー52は生物学的に不活性な被覆56を有し、その結果、マーカーを患者の体内に永久的に埋め込むことができる。マーカー52に外部励磁源32によって賦勢されると、各々のマーカーのシグナル部分が、その選択された周波数で共鳴して、測定可能なマーカー信号を或る強度で出し、その結果、マーカー信号を、センサアレイ34(図1参照)によって各々測定することができる。コンピュータ制御装置による周波数多重化により、コンピュータ制御装置38に、センサアレイに対するマーカーの位置及び向きを計算するときに、マーカーの異なるシグナル部分からのマーカー信号を区別させる。
【0028】
図5に最も良く示すように、他の実施形態のマーカー30は、単一のフェライトコア60と、マーカーについてX、Y及びZ軸線方向を定めるように、互いに垂直な軸線方向に配向された三組の巻き線62と、を有する立方体形状のマーカー58からなる。各巻き線62は、小さいコンデンサー64に接続され、他の二つの巻き線と湖異なる周波数で共鳴するように構成される。したがって、立方体形状のマーカー58も、ワイヤレスの三軸の共鳴マーカーである。
【0029】
一つの実施形態では、ワイヤレスの励磁可能なマーカー30が共鳴して、およそ10kHz乃至200kHz周波数範囲内で測定可能な信号を出す。他の実施形態では、マーカー30を、測定可能で識別可能なマーカー信号を生じさせるために十分な電力を提供するバッテリーのような電源を有する、自給式の動力マーカーである。他の実施形態では、マーカー30は、マーカーに特有のマーカー信号を発生させる選択された電源又は励磁源に電線を介して接続できる「有線」マーカーである。マーカー信号は、周波数の関数(即ち、周波数多重)として、時間の関数、即ち時分割多重として、唯一である。
【0030】
選択された適用では、単一のマーカー31、好ましくは、単軸マーカーが、ターゲット12内に埋め込まれ、単一の共鳴マーカーからの信号の強度が、センサアレイ34に対してターゲット位置情報を決定するのに使用される。別の実施形態では、二つ、三つ又はそれ以上のマーカーが、ターゲット内又はターゲットに隣接した既知の位置に埋め込まれる。各マーカー30は、他のマーカーに対してその特有の信号を生じさせ、その結果、センサアレイ34は、周波数多重によって、マーカーを区別する。センサアレイ34は、マーカー30からの特有の信号の強度を測定する。信号強度測定値は、(以下により詳細に論ずる)幾何学的な計算に使用するために変換されて、実際の三次元位置(X、Y、Z)と、或いは、センサアレイ34に対してマーカーの角度向き(縦揺れ角、偏揺れ角、横揺れ角)とを正確に決定する。
【0031】
図1を再び参照すると、システム10は、マーカー30を励磁するための磁界を発生させる励磁源32を有する。励磁源は、ターゲット12に対して、選択された位置で、且つ、マーカー30に十分近く位置決めされているので、放出された磁界は、マーカーを良好に賦勢するのに十分な強度を有する。図示した実施形態では、複数のマーカー30が、ターゲット12内に又はターゲット12に隣接してに患者の体14の中に永久的に埋め込まれる。一つの実施形態では、コンピュータ制御装置38は、それぞれのマーカーを選択された周波数で選択的に励磁するように、マーカー30ごとに励磁源32のための別々の駆動回路を提供する。一つの実施形態では、励磁源32は、X、Y及びX軸線方向に三次元磁界を発生させる三次元のAC磁界源である。この励磁源32は、各マーカー30について一つのソースコイルを提供し、ソースコイルを通って駆動された電流が、それぞれのマーカーに同調されたAC磁気波形を発生させる。別の実施形態では、励磁源32中のソースコイルは、それぞれのマーカー30のための多重の又は走査された励磁周波数磁界を発生させるように構成されたコイルによって作られる。
【0032】
図6及び図7は、体の外部に位置決めでき(図6参照)、ターゲットの12の中に、又はその近くに位置決めされたマーカー30から間隔を隔てたセンサアレイ34の概略等角図である。これらの図示した実施形態では、三つのマーカー30が、ターゲット12の中に、又はその近くに埋め込まれて示される。図6に見えるように、センサアレイ34は、複数のセンサ36を基準座標系X、Y又はZに沿って互いに対して一定の既知の幾何学的形態で支持するフレーム70を有する。フレーム70上の各センサ36の位置は基準座標系72に対して固定されて、コンピュータ制御装置38によって使用される測定データを得るための一定の基準点を定める。図6の実施形態では、フレーム70は、センサが単一平面に位置決めされるように、センサ36を支持する。図7の実施形態では、フレーム70は、二つの直交する平面でセンサ36を支持するように形成され、従って、センサ36は、基準座標系72のX、Y及びZ軸に沿って配向される。したがって、センサアレイ34は、測定値が得られる固定基準構造を成し、計算が実行されて、ターゲット12、ターゲットアイソセンタ40及びマシンアイソセンタ22の相対位置が決定される。
【0033】
図6及び図7の図示した実施形態は、「ワイヤレス」マーカー30を利用し、その結果、周波数多重が、異なるマーカーからの信号を識別するのに利用される。各センサ36は、X、Y及びZ軸に対して、マーカー30のそれぞれ一つからの絶対的なマーカー信号強度を測定する三軸センサーである。基準座標系の各軸に沿ったマーカー信号の絶対的な信号強度は、各マーカーのX、Y及びZ位置を決定するために、各マーカーのためのセンサ36によって測定される。
【0034】
磁界の強度は、励磁源からの距離の三乗に比例する割合で減少することが知られている。したがって、センサからのマーカーの距離を、マーカーの信号強度に基づいて決定することができる。マーカーから、互いに既知の位置に隔てられた一連のセンサまでの幾何学的な関係は、一つの特有の解で一連の方程式を解くのに使用される。したがって、マーカー30とセンサ36との間の距離は、それぞれのセンサーによって測定されたマーカーの信号強度に基づいて、コンピュータ制御装置38によって計算され、幾何学上の方程式に対する最も適当な解を求めて繰り返される。
【0035】
センサアレイ34に対する空間内のマーカー30の正確な位置を、そのマーカーと、アレイの互いに間隔を隔てられた少なくとも四つの別々の三軸センサとの間の距離に基づいて計算することができる。三軸センサからの距離の絶対的な大きさは、三軸大きさの各々(x、y及びz方向)を二乗し、その結果を合計し、最後に、距離の結果について平方根をとることによって決定される。一例として、一つのセンサ36とマーカー30の一つとの間の距離は、球の半径に幾何学的に相当する。図8は、別々のセンサ36によって各々定められた中心点102を有する二つの例示の球100を示す。二つの球100が交差するとき、交差は円104を定める。その結果、マーカーが、その円上の或る点に置かれていることが知られる。図9に示すように、三つの球100が交差するとき、交差は、マーカーがその線上に置かれる、二つの点105のうちの一つを定める。四つの球100が交差するとき、交差は、センサアレイ34に対する空間内のマーカー30の正確な位置に相当する空間内の単一点108を定める。
【0036】
ターゲット12内に埋め込まれた単一のマーカー30を使用する実施形態では、センサアレイ34は、空間内のそのマーカーの位置を決定するのに、たった四つの三軸センサ36を含めばよい。信号は周波数多重であり、多重周波数は各センサコイルで受けられ、各個々の周波数成分は、制御電子工学の高速フーリエ変換(first Fourier transform、FFT)で組み合わされた信号を処理することによって調べられので、多重マーカーは同じセンサーで位置確認される。ターゲット12の中又はターゲット12に近接して位置決めされた三つ以上のマーカー30を有する実施形態では、センサアレイ34は、基準座標系72に対して既知の幾何学的な向きに構成され、その結果、三組の三次元データ(単一軸マーカーからのx、y及びz)を使用することによって、基準座標系72に対する空間内の治療体積の角度向き(即ち、縦揺れ角、偏揺れ角、横揺れ角)を計算するために、コンピュータ制御装置38が、マーカー信号の測定値を、使用することができる。ターゲットに対するマーカー30の位置に基づいて、ターゲット12の位置及び角度向きを、コンピュータ制御装置38によって決定することができる。
【0037】
マーカーの信号を、多くの方法で、信号処理ソフトウエア又は電子装置を経て、励磁源32によって発生された信号から分離するのがよい。一つの実施形態では、励磁源32を「オン」にしてマーカーを励磁し、次いで、「オフ」にして、励磁源からの信号による干渉なしに、マーカーの応答の測定を可能にする。マーカー30は、励磁源32をセンサーの電気的なインダクタンス、容量及び直列抵抗によって決定される期間「オフ」にした後、共鳴し続ける。別の実施形態では、システムは、励磁源32がマーカー30の測定中「オン」のままである連続波(continuous wave、CW)で作動される。マーカー信号は、励磁源からの信号と位相が90°ずれているので、マーカー信号は、励磁信号から取り除かれる。励磁信号の零交差の時間は既知であり、変わらないマーカー信号は、その時間でそのピーク強度であろう。第三実施形態では、励磁源の信号の出力周波数は、マーカーの励磁を最大にするように、連続的に変えられ又は走査され、その結果、不要な励磁信号を最小にし、或いは除去しながら、マーカー信号を最大にする。
【0038】
ターゲット12及びターゲットアイソセンタ40に対する各マーカーの位置も計算され、或いは決定される。一つの実施形態では、ターゲット12内のターゲットアイソセンタ40は、CTスキャン、MRI、超音波システム、又は、核画像システム(nuclear imaging system)(例えば、陽電子放射断層撮影法)のような、画像システムによって提供された、ターゲットについての画像データに基づいて、最初に選択される。一旦、ターゲットアイソセンタ40が選択されると、埋め込まれた各マーカー30の位置は、ターゲットアイソセンタ40に対して測定される。次いで、ターゲットアイソセンタ40の位置は、基準座標系に対する各マーカーの位置を定めることに基づいて、基準座標系72に対して決定される。
【0039】
別の実施形態では、ターゲットアイソセンタ40は、ターゲット12に対するマーカーの位置の関数として定められる。マーカー30は、ターゲット12中に、又はターゲット12に隣接して選択的に位置決めされ、マーカーの向きは、ターゲットアイソセンタを定め、且つ計算するのに使用される。かくして、たとえマーカー30がターゲット12内に、或いはターゲット12のすく隣にさえ正確に埋め込まれていなくとも、ターゲット12内のターゲットアイソセンタ40を定め、その位置をマーカー30及び基準座標系72に対して決定することができる。しかしながら、ターゲットが移動すれば、ターゲットとマーカーがユニットと一緒に移動するように、マーカー30は、ターゲット12に十分近く位置決めされる。したがって、ターゲットの移動は、センサアレイ34に対するマーカーの移動を追跡をすることによって監視される。
【0040】
システム10は、リアルタイムで、ターゲット12の移動を追跡するように構成される。ターゲット12及びマーカー30を含む患者の体14の位置がセンサアレイ34に隣接して位置決めされ、且つ、マーカーが賦勢されるとき、コンピュータ制御装置38は、各センサ36からデータを獲得し、結果を毎秒およそ12回出力する。コンピュータ制御装置は、センサ36からの測定データを得て、五秒ごとに、センサアレイに対するターゲットアイソセンタ40の位置を計算する。別の実施形態では、コンピュータ制御装置38は、センサ36を測定して、センサアレイ34に対する特定のターゲットアイソセンタ40の運動をリアルタイムで監視することができる。最新測定速度は、測定ノイズを減じるのに十分なデータ平均化を可能にし、同時に、ユーザにとって十分な更新速度を可能にするように減じられるのがよい。
【0041】
図10は、ガントリー20の下で、センサアレイ34に隣接して、患者の体14を移動可能に支持する支持台76を有する本発明の側面を示す部分等角図である。支持台76は、マシンアイソセンタ22の下に位置決めできる。支持台76は、ターゲットアイソセンタ40がマシンアイソセンタと一致するまで、マシンアイソセンタ22に対する患者16の位置を調節するように移動できる。センサアレイ34は、支持台76の上、支持台76の下、或いは支持台76に置かれ、或いはこれに連結される。変形例として、センサアレイ34を、確認されるべきマーカー30(埋め込まれた、外部の、又は、ガントリーの)に十分に近い位置で、線形加速器のガントリーに取り付けられるのがよい。線形加速器に取り付けられたセンサアレイ34を有するこの変形例では、マシンアイソセンタ22からセンサアレイまでの位置が既知であり、その結果、別体のガントリーマーカー42を使用しなくてもよい。
【0042】
図1及び図10に最も良く見えるように、支持台76は、ベース88と、センサアレイ34に対して直線移動及び角移動可能にベースに移動可能に支持されたテーブル上面90と、を有する。マシンアイソセンタ22及びセンサアレイ34に対するテーブル上面及び患者16の移動を制御する移動制御システム78が、テーブル上面90に連結される。移動制御システム78はまたコンピュータ制御装置38に連結され、コンピュータ制御装置38は移動制御システム78を作動して、患者の直線位置又は角位置を調節するようにプログラムされている。一つの実施形態では、テーブル上面の位置は、移動制御システムを作動する、医師、物理学者又は技師のような、許可されたユーザに応答して、或いは、コンピュータ制御装置38によって与えられた指示に応答して自動的に移動する。
【0043】
一旦、ターゲットアイソセンタ40がマシンアイソセンタ22と一致するように、ターゲット12が位置決めされると、電離放射線を、ターゲット領域又は体積に直接、選択的に、且つ非常に正確に送出することができる。ターゲット12に対する放射線療法の適用を、ターゲットの周りに必要とされるマージンを潜在的に最小にしながら、正確な精度で選択された線量及び強度で行うことができる。一つの実施形態では、ターゲットアイソセンタ40の実際の位置は、放射線療法を施す間、実質的に連続的に監視され、且つマシンアイソセンタ22に対して追跡される。ターゲットアイソセンタ40が、変位距離の許容範囲を超えてマシンアイソセンタ22から離れるように移動すれば、コンピュータ制御装置38は、信号を放射線療法装置に与えて、ターゲットに対する放射線療法を中断させる。次いで、ターゲットアイソセンタ40がマシンアイソセンタ22と再び一致するまで、ターゲットの位置を手動で又は自動的に調節することができ、そして、放射線療法を再開することができる。一つの実施形態では、コンピュータ制御装置38は、ターゲットアイソセンタ40がマシンアイソセンタ22から移動しても移動距離が許容範囲を超えなければ、コンピュータ制御装置38が放射線療法を中断しないようにプログラムされる。この移動の範囲は、ターゲットの種類(例えば、前立腺、肺、肝臓)、ターゲットの大きさ、ターゲットの位置、ビームの形状/大きさ、及び放射線療法計画のような多くの要因に依存する。
【0044】
コンピュータ制御装置38に連結された監視組立体44によって、ターゲットアイソセンタの位置の追跡を容易にする。図11及び図12は、例として、マーカー30、ターゲットアイソセンタ40及びマシンアイソセンタ22の位置について、フィードバックデータをオペレータに提供する監視組立体44のフィードバック部分80を示す。フィードバック部分80は、画像、図形又は玄武情報をオペレータに提供する表示モニターである。
画像フィードバック装置、聴覚フィードバック装置、又は視覚フィードバック装置のような他のフィードバック部分80を、別の実施形態では使用することができる。一つの実施形態では、コンピュータ制御装置38は、体14の中のターゲット12の形状及び大きさを定める、例えば、CT、MRI又は超音波画像システムからの画像データを収容する。
画像データはまた、ターゲット12内の、又はその周わりの各マーカー30の位置を定める。コンピュータ制御装置38は、画像データを使用して、ターゲット、マーカー及びターゲットアイソセンタの模擬モデルを作る。この模擬モデルは、図11に仮想線で示すように、フィードバック部分80に表示される。この模擬モデルはまた、模擬ターゲットアイソセンタ40がマシンアイソセンタと一致するように、マシンアイソセンタ22を重ねて表示される。模擬ターゲット及び模擬マーカーはまた、特定の放射線療法を、ターゲットに適用するために、実際のターゲットをどのように三次元的に位置決めし、且つ配向しなければならないかを表示する。
【0045】
監視組立体44も、コンピュータ制御装置38から情報を受けて、これを表示して、マシンアイソセンタ22に対して、模擬ターゲット及び模擬マーカーに対するマーカー30及びターゲットアイソセンタ40の実際の位置を示す。したがって、患者16が支持台76(図1参照)上にいる間に、フィードバック部分80によって、オペレータが、模擬マーカーに対するマーカーの実際の位置、及びマシンアイソセンタ22に対するターゲットアイソセンタ40の実際の位置を、実質的にリアルタイムで決定することを可能にする。患者16及び支持台76を、ターゲット112が選択された放射線療法のために正しく配向されるまで、再位置決めすることができる。
【0046】
マシンアイソセンタ22に対するターゲット12の位置を正確に追跡し、監視するのに送出して、システム10を、時間中、患者の体14の中の腫瘍等のようなターゲットの状態を監視するのに使用することもできる。図13及び図14は、体92の中の腫瘍90を示す概略図である。腫瘍90内又はそれに近接して永久的に埋め込まれた三つのマーカー30をこの実施形態のために示す。腫瘍90及びマーカー30の画像が、時間の初めから終わりまで、CT、MRI、超音波、又は他の撮像技術によって得られる。これらの腫瘍90及びマーカー30の多重画像から、腫瘍に対するマーカーの位置を比較し、追跡することができる。したがって、医師は、多重画像中のマーカー30を、腫瘍が患者の体内で縮み、生長し、移動し、或るはそうではなく変化したのかどうかを決定する基準ツールとして使用することができる。
【0047】
一例として、図13は、三つのマーカー30の埋め込んだ、第一条件の腫瘍90の画像を示し、図14は、もっと後の時間に得られた腫瘍の第二の画像を示す。第二の画像は、患者の体内の同じ位置に同じマーカーを示し、マーカーに対する腫瘍の位置から、人は、腫瘍が縮んだことが分かる。かくして、医師は、例えば、放射線療法の効果、追加の治療が必要か否か、或いは、腫瘍の生長の変化が起こったか否か、或いは、放射線治療計画を変更する必要があるか否かを決定する時間の初めから終わりまで、体内の腫瘍又は他のターゲットの状態を追跡することができる。
【0048】
上述の実施形態では、マーカー30は、ターゲット12内に、又はそのすく隣の皮下に埋め込まれているとして説明され図示されている。このマーカー30の埋め込みは、ターゲット12が移動すれば、マーカーがユニットとしてターゲットと一緒に移動するようにすることが必要とされる場合に行われる。図15及び図16に示す別の実施形態では、マーカーは、体内又は体上で、ターゲット12に実質的に隣接し、且つこれと整列して、患者の体14の外表面112に接着された表面取付マーカー110である。表面取付マーカー110を、ターゲット12に対して、体の外表面112上の実質的に固定した位置に、テープ等のような粘着剤で、取り外し自在に接着することができる。これらの表面取付マーカー110は、外表面に対して体14内で実質的に移動することが知られていないターゲット12に特に適している。表面取付マーカー30はまた、体14の中のターゲットの大きさ又は位置が、ターゲットアイソセンタの幾らかの運動が、効果的な放射線療法又は治療に重要でないような場合の使用に適している。したがって、表面取付マーカー110は、ターゲット12及びマシンアイソセンタ22の正確な整合及び向きのための基準点をなす。変形例として、マーカー30を、治療アイソセンタに対して既知の位置で患者を固定する装置上に又はその中に取り付けてもよい。
【0049】
一つの実施形態での表面取付マーカー110は、ワイヤレスマーカーであり、その結果、ターゲット12に対するマーカー110の位置を乱すことなく、患者16が治療領域に行ったり来たりすることができるように、放射線線治療期間後、マーカーを患者の体14上に接着されたままにすることができる。変形例では、マーカー110は、患者16に接着されたままであり、治療領域の「有線」マーカーシステムのリード線に接続可能である。マーカーを患者の体上の適所に固定したまま、患者16を治療領域から去らせるために、配線をマーカー110から離すことができる。
【0050】
表面取付マーカー110はまた、放射線治療プログラム中、患者の基線胴回り(前後及び横寸法)を監視するのに使用できる。患者のセパレータと称される、基線胴回り測定値は、CT、MRI又は物理的な測定によって最初に得られる。患者のセパレータは、その患者のための放射線治療計画を準備するときに使用される。化学療法又は放射線療法中に起こるかもしれない患者のセパレータの変化についてのデータを提供するために、表面取付マーカー100を単独で、又は、埋め込んだマーカーと組み合わせて利用することができる。各表面取付マーカー110は、例えばターゲットアイソセンタ又は互いに、空間内の識別可能な最初の位置を有する。センサアレイ34及びコンピュータ制御装置38は、各表面取付マーカー及び/又はターゲットアイソセンタの間の距離を決定するように形成される。コンピュータ制御装置38は、患者のセパレータに対応して、距離を計算し、監視する。放射線療法の進行中、例えば、化学療法又は放射線療法による実質的な体重の減少のために、患者のセパレータが著しく変化すれば、より少ない患者の組織が放射線ビームを交替するのに利用でき、それにより、計画した放射線量より高い結果となるため、治療計画は妥当でなくなる。
【0051】
一つの実施形態では、表面取付マーカー110を、放射線治療操作前及び/又は操作中に、患者のセットアップ操作を容易にし、かつ早くするのに使用することができる。表面取付マーカー110を、既知の位置で、患者の体14上の選択された位置に位置決めする。マーカー110を励磁して、センサアレイに対する位置を決定する。次いで、マーカーの位置情報を、患者の外皮膚と線形加速器又はテーブル上面との間の距離である、ターゲット皮膚距離又は線源皮膚距離を計算するのに使用することができる。マーカー110をまた、テーブル上面から、マーカー又は患者の皮膚に投影されたレーザー従事線のような他の整合手段までの間の距離である、テーブル上面からアイソセンタまでを決定するのに使用することができる。したがって、患者が放射線治療計画に従って適正に位置決めされているかどうかを速やかに決定するために、セットアップ操作中、表面取付マーカー110を、関連した距離を自動的に計算するのに使用することができる。
【0052】
別の実施形態では、表面取付マーカー110を、ターゲット12の中に又はその近くに埋め込まれた一つ以上のマーカー30と共に使用することができる。各マーカー110又は30の相対的な位置を、上述のような患者のセットアップ、ターゲットの位置確認、ターゲットの位置決め、ターゲットの移動の追跡、及び/又はターゲットの持ち上げの任意の組み合わせのために計算し、使用することができる。
【0053】
システム10はまた、放射線療法を施す前に、患者の自動セットアップ操作に使用するようになっている。一つの実施形態の自動セットアップ操作を、図17のフローチャートとして、概略的に示す。患者のこのセットアップ操作において、患者の体の中の腫瘍又は他のターゲットを識別する(ブロック150参照)。例えば、X線、CT、MRI、核又は超音波撮像によって、ターゲットの画像を得る(ブロック152参照)。次いで、医師及び/又は技師は、特定の腫瘍について治療計画を決定する(ブロック154参照)。一つ以上のマーカーを、ターゲットに対して選択された位置で、体の中に又は体上に付け(ブロック156参照)、そして、マーカーに対する治療アイソセンタの位置を決定し、或いは計算する(ブロック158参照)。
【0054】
ターゲット及びマーカーをセンサアレイにほぼ隣接するように、患者を可動支持台上に位置決めする(ブロック160参照)。励磁源を作動して、マーカーを賦勢し(ブロック162参照)、センサが、マーカーからの信号の強度を測定する(ブロック164参照)。コンピュータ制御装置は、センサアレイ及びマシンアイソセンタに対するマーカー及びターゲットアイソセンタの位置を計算する(ブロック166参照)。コンピュータは、ターゲットアイソセンタとマシンアイソセンタの位置を比較し(ブロック168参照)、そして、二つのアイソセンタが不整合ならば、コンピュータは、支持台の制御システムを自動的に作動して、ターゲットアイソセンタがマシンアイソセンタと一致するまで、テーブル上面をマシンアイソセンタに対して移動させる(ブロック170参照)。
【0055】
一つの実施形態では、コンピュータ制御装置はまた、模擬マーカーの位置及び向きに対するマーカーの位置及び向きを決定する。マーカーが模擬マーカーと適切に整合も配向もされていなければ、支持テーブルは、適切なマーカーの整合に必要とされるように、直線的に及び角度的に調節される。このマーカーの整合は、6次元、即ち、X、Y、Z、(縦揺れ角、偏揺れ角、横揺れ角)に沿ったターゲット体積を正確に位置決めする。したがって、患者は、放射線療法をターゲットに正確に送出するために、マシンアイソセンタに対して正確な位置に自動的に位置決めされる。
【0056】
この自動セットアップ操作の一つの実施形態では、ターゲットアイソセンタがマシンアイソセンタと一致するまで、コンピュータは、放射線放出装置が放射線ビームを発するのを制止する。コンピュータは、放射線治療を施す間、ターゲットアイソセンタの位置を監視する(ブロック172参照)。ターゲットアイソセンタの位置が転位の許容度又は許容範囲を超えていれば、コンピュータは、放射線アイソセンタの放出を中断する(ブロック174参照)。次いで、コンピュータは、ターゲットがターゲットアイソセンタと共に好ましく位置決めされ、且つマシンアイソセンタと一致し(ブロック176参照)、放射線療法を、ターゲットの連続照射のために再び作動することができる(ブロック178参照)ように、テーブル上面及び患者を(ユニットとして)自動的に再位置決めすることができる。放射線療法の放出が未だ完了されていなければ(ブロック180参照)、操作は、参照ブロック172に戻って、放射線が送出されるときに、マシンアイソセンタに対するターゲットの位置を監視する。したがって、ターゲットの周囲に大きなマージンを必要とすることなく、放射線がターゲットに正確に送出されるように、調節が自動的に行われる。
【0057】
本発明の特定の実施形態及び例を、例示の目的でここに説明したけれども、当業者にとって容易に認識されるように、本発明の精神及び範囲を逸脱することなく、種々の同等の変形を行うことができる。本発明の側面の個々に提供された教示は、体内でターゲットを位置確認し、監視し、且つ追跡するのに適用することができ、上述のように、体内の腫瘍の例示の放射線治療に必ずしも限定されない。
【0058】
一般的に、特許請求の範囲では、使用された用語を、本発明を明細書及び特許請求の範囲に開示された特定の実施形態に限定するように解釈するべきではないが、体内の選択されたターゲットの位置を位置確認、監視し、及び/又は追跡するために、装置及び方法を提供するための特許請求の範囲に従って作動する全てのターゲット位置確認及び監視システムを含むように解釈すべきである。したがって、本発明は、特許請求の範囲によるのを除いて、限定されない。
【0059】
体内に埋め込まれ、励磁源によって励磁されて、前記複数のセンサーによって測定可能な特有のマーカー信号を生じることができる複数のマーカーを更に有する、請求項1記載のターゲット位置確認追跡システム。
【0060】
前記複数のマーカーは、少なくとも三つのマーカーを含む、請求項2記載のターゲット位置確認追跡システム。
【0061】
前記マーカーは、各々互いに軸線方向に並んでいない、請求項3記載のターゲット位置確認追跡システム。
【0062】
各マーカーからのマーカー信号は、他のマーカー信号の周波数と異なる特有の周波数を有する、請求項2記載のターゲット位置確認追跡システム。
【0063】
前記マーカーは、体内に埋め込めるワイヤレスマーカーである、請求項1記載のターゲット位置確認追跡システム。
【0064】
前記データ演算ユニットは、前記センサーに対するターゲットの位置を決定するように構成される、請求項6記載のターゲット位置確認追跡システム。
【0065】
前記マーカーは、体内に永久的に埋め込めるように構成される、請求項1記載のターゲット位置確認追跡システム。
【0066】
前記マーカーは、単軸共鳴マーカーである、請求項1記載のターゲット位置確認追跡システム。
【0067】
前記マーカーは、ワイヤレスマーカーである、請求項1記載のターゲット位置確認追跡システム。
【0068】
前記基準デバイスは、マシンアイソセンタに対して一定位置にあり、前記センサーのうちの少なくとも二つによって測定可能な基準信号を発する、請求項1記載のターゲット位置確認追跡システム。
【0069】
前記データ演算ユニットは、(a)前記マシンアイソセンタに対する前記センサーの位置、及び(b)前記センサーに対するマーカーの位置を決定して、前記マシンアイソセンタに対する前記ターゲットの位置を決定するように構成される、請求項1記載のターゲット位置確認追跡システム。
【0070】
前記マーカーから遠隔にあって、前記マーカーにエネルギーを与える磁界を発生させるように構成された励磁源を更に有する、請求項1記載のターゲット位置確認追跡システム。
【0071】
前記複数のセンサは、単一平面内のベースに固定されて、センサアレイを形成する、請求項1記載のターゲット位置確認追跡システム。
【0072】
体を支持するように成形され、且つ寸法決めされた患者支持構造体を更に有し、前記複数のセンサは、前記患者支持構造体に取り付けられる、請求項1記載のターゲット位置確認追跡システム。
【0073】
前記テーブル構造体は、ベースとテーブル上面とを有し、前記ベースは、前記センサーに対して一定位置にあり、前記テーブル上面は、前記センサーに対して移動可能に調節できる、請求項15記載のターゲット位置確認追跡システム。
【0074】
前記データ演算ユニットに接続された監視システムを更に有し、前記監視システムは、互いに対するターゲット及びマシンアイソセンタの位置についてのフィードバック情報を提供するように構成されたフィードバック部分を有する、請求項1記載のターゲット位置確認追跡システム。
【0075】
前記フィードバック部分は、表示装置である、請求項17記載のターゲット位置確認追跡システム。
【0076】
データ演算ユニット及び監視システムは、互いに対するターゲット及びマシンアイソセンタの移動を、リアルタイムで識別し且つ表示するように構成される、請求項17記載のターゲット位置確認追跡システム。
【0077】
前記マーカーは、互いに軸線方向に並んでいない複数のマーカーのうちの一つであり、データ演算ユニットは、前記複数のセンサー及びマシンアイソセンタに対するターゲットの三次元空間の位置及び向きを識別するように構成される、請求項1記載のターゲット位置確認追跡システム。
【0078】
前記基準デバイスは、放射線療法送出機械に取付可能な少なくとも一つの励磁可能なマーカーであり、一つの励磁可能なマーカーが、基準信号を生じさせる、請求項1記載のターゲット位置確認追跡システム。
【0079】
前記基準デバイスは、前記複数のセンサ及びデータ演算ユニットに物理的に接続されず、前記基準デバイスと前記センサーとの間に、ワイヤレス相互接続が設けられる、請求項1記載のターゲット位置確認追跡システム。
【0080】
放射線をマシンアイソセンタに対して治療体積に送出する放射線療法送出源と共に使用できるターゲット位置確認監視システムであって、
互いに対して、及びターゲットに対して既知の幾何学的形態で体上に、及び/又は体内に固定可能であり、外部励磁源によって励磁されて、前記マーカーによる識別可能なマーカー信号を生じさせる複数のワイヤレスマーカーと、
前記マーカーからのマーカー信号を測定するように位置決めされ、前記マーカーのうちの一つ以上のためにマーカー測定信号を出すように形成された複数のセンサーを有するセンサアレイと、
放射線送出源及びマシンアイソセンタに対して選択した位置に位置決め可能な基準デバイスと、
前記センサーに連結されて、前記センサーからマーカー測定信号を受け、マーカー測定信号を使用して、前記マシンアイソセンタに対するターゲットの位置を決定するように構成されたデータ演算ユニットと、を含む、ターゲット位置確認監視システム。
【0081】
各マーカーからの信号は測定可能であり、各センサは、マーカーのうちの少なくとも一つからの信号を測定し、コンピュータ制御装置は、測定された信号に基づいて、体内のターゲットの位置及び/又は空間的な向きを決定する、請求項23記載のターゲット位置確認監視装置。
【0082】
前記マーカーから遠隔にあって、前記マーカーを賦勢する励磁界を作動するように構成された励磁源を更に有する、請求項23記載のターゲット位置確認監視システム。
【0083】
前記センサアレイは、前記マーカーから遠隔の選択された位置にユニットとして位置決め可能であり、前記センサーは平面上に配列される、請求項23記載のターゲット位置確認監視システム。
【0084】
体を支持するように形成され且つ寸法決めされた患者支持構造体を更に有し、複数のセンサは、前記患者支持構造体の部分に対して一定位置にある、請求項23に記載のターゲット位置確認監視システム。
【0085】
前記コンピュータ制御装置に連結された監視システムを更に有し、前記監視システムは、互いに対する、ターゲット及びマシンアイソセンタの位置についてのフィードバック情報を提供するように構成されたフィードバック部分を有する、請求項23記載のターゲット位置確認監視システム。
【0086】
前記フィードバック部分は、表示装置である、請求項28記載のターゲット位置確認監視システム。
【0087】
前記コンピュータ制御装置及び監視システムは、互いに対するターゲット及びマシンアイソセンタの移動をリアルタイムで識別し、且つ、伝えるように構成される、請求項28記載のターゲット位置確認監視システム。
【0088】
体内のターゲットに照射する放射線療法送出システムであって、
放射線を、放射線療法送出源から、前記放射線療法送出源から間隔を隔てたマシンアイソセンタに送出する放射線送出組立体と、
ターゲットに対して或る位置で体の中に及び/又は体の上に固定可能で、外部励磁源によって励磁されて、測定可能なマーカー信号を生じさせることができるマーカーと、
互いから間隔を隔てられ、互いに既知の幾何学的形態に配列され、マーカー信号を測定し、マーカー信号に関する測定信号を発生させるように構成された複数のセンサと、
前記マシンアイソセンタに対して位置決めされ、前記マシンアイソセンタに対する前記センサーの位置を決定するように構成された基準デバイスと、
前記センサーに連結され、マーカー測定信号を受け、マーカー測定信号を使用して、前記ターゲットが前記マシンアイソセンタから所望の距離内にあるか否かを決定するように構成されるデータ演算ユニットと、を有する放射線送出システム。
【0089】
体内に埋め込み可能な複数のマーカーを更に有し、各マーカーは、外部励磁源源によって励磁されて、前記複数のセンサーによって測定可能なマーカー信号を生じさせることができる、請求項31記載の放射線送出システム。
【0090】
各マーカーからのマーカー信号は、他のマーカーとなる特有の信号である、請求項32記載の放射線送出システム。
【0091】
各マーカー信号は、他のマーカー信号の周波数と異なる周波数を有する、請求項32記載の放射線送出システム。
【0092】
マーカー信号は、或る信号強度を有し、前記データ演算ユニットは、マーカー信号に基づいてマーカー及びターゲットアイソセンタの空間的な位置を計算する、請求項31記載の放射線送出システム。
【0093】
基準デバイスは、前記放射線送出組立体に取り付けられ、センサーによって測定可能な基準信号を出す、請求項31記載の放射線送出システム。
【0094】
前記基準デバイスは、複数のセンサーによって測定可能な信号を出し、前記データ演算ユニットは基準デバイスに連結可能であり、前記データ演算ユニットは、基準信号の測定値に基づいて、複数のセンサーに対するマシンアイソセンタの位置を識別するように構成される、請求項31記載の放射線送出システム。
【0095】
体の外に位置決めでき、マーカーを励磁してマーカー信号を生じさせるように構成された励磁源を更に有する、請求項31記載の放射線送出システム。
【0096】
前記複数のセンサは、マーカーに対してユニットとして位置決め可能なセンサアレイを構成する、請求項31記載の放射線送出システム。
【0097】
マーカーが埋め込まれる体を支持するように形成され、且つ寸法決めされた患者支持構造体を更に有し、前記センサは、前記患者支持構造体の一部分に対して一定位置に取り付けられる、請求項31記載の放射線送出システム。
【0098】
前記患者支持構造は、ベースと、ターゲットをマシンアイソセンタと一致して位置決めするために前記センタに対して移動可能に調節可能なテーブル上面と、を有する、請求項31記載の放射線送出システム。
【0099】
前記データ演算ユニットに連結され、且つ、互いに対するマシンアイソセンタとターゲットの位置についてのフィードバック情報を提供するように構成されたフィードバック部分を有する監視システムを更に有する、請求項31記載の放射線送出システム。
【0100】
前記マーカーは複数のマーカーのうちの一つであり、前記マーカーは、各々互いに軸線方向に並んでおらず、前記コンピュータ制御装置は、前記複数のセンサーに対するターゲットの三次元空間の位置及び向きを計算するように構成されている、請求項31記載の放射線送出システム。
【0101】
前記基準デバイスは、前記放射線療法送出源に取り付けられたワイヤレスの励磁可能なマーカーである、請求項31記載の放射線送出システム。
【0102】
前記放射線療法送出組立体は、強度調節放射線療法(intensity modulated radiation therapy、IMRT)システム、三次元等角外部ビーム放射線システム(three-dimensional conformal external beam radiation system)、定位放射線外科システム(stereotactic radiosurgery system)、断層治療(tomo therapy)及び小源照射療法(brachytherapy)システムの一つである、請求項31記載の放射線送出システム。
【0103】
前記データ演算ユニットは、前記マーカーの位置、及び前記ターゲットの位置及び向きを識別する視覚的な診断用データを含み、前記データ演算ユニットは、前記ターゲットに放射線療法を適用する前に、視覚的な診断用データと、前記複数のセンサーに対する体内の前記ターゲットの位置及び空間的な向きとを比較し、且つ、前記ターゲット内のターゲットアイソセンタを識別するように構成されている、請求項31記載の放射線送出システム。
【0104】
電離放射線を体内の選択されたターゲットに送出する放射線療法システムであって、
電離放射線を前記ガントリーから離れた遠隔位置の治療アイソセンタに送出する移動可能なガントリーと、
体内でターゲットに対する或る位置に固定でき、共鳴器と、その共鳴器を入れるカプセルとを有し、前記共鳴器は、外部の磁界によって励磁されて、体内に或る間測定可能なマーカー信号を生じさせることができるワイヤレスマーカーと、
既知の幾何学的形態に配列され、マーカー信号を測定し、且つ測定信号を出すように構成された複数のセンサーと、
前記センサーに連結され、測定信号を受け、測定信号を使用して、前記治療アイソセンタに対して前記ターゲットの位置を決定させる指示を有するコンピュータ制御装置と、を含む、放射線療法システム。
【0105】
マーカーが埋め込まれた体を支持するように構成され且つ寸法決めされた患者支持構造体を更に有し、前記センサは、前記患者支持構造の部分に対して共通の平面に取り付けられる、請求項47記載の放射線療法システム。
【0106】
コンピュータ制御装置に連結された監視システムを更に有し、前記監視システムは、互いに対する、治療アイソセンタ及びターゲットの位置についてのフィードバック情報を提供するように構成されたフィードバック部分を有する、請求項47記載の放射線療法システム。
【0107】
前記コンピュータ制御装置及び監視システムは、互いに対するターゲット及びマシンアイソセンタの移動をリアルタイムで識別し、且つ表示するように構成される、請求項49記載の放射線療法システム。
【0108】
前記コンピュータ制御装置は、前記マーカーの位置、及び、ターゲットの位置及び向きを識別する画像データを含み、前記コンピュータ制御装置は、画像データと、前記複数のセンサーに対する体内のターゲットの位置及び空間的な向きとを比較し、ターゲット内のターゲットアイソセンタを識別するように構成される、請求項49記載の放射線療法システム。
【0109】
選択された線量の放射線を体内の選択されたターゲットに送出する放射線送出源と共に使用可能な放射線ターゲット整合システムであって、
前記ターゲットに対する選択された位置に、体内に及び/又は体の上に付けることができ、励磁源によって励磁されて、体内に測定可能な信号を生じさせることができるマーカーと、
ターゲット及び体内に位置決めされたマーカーの画像データを得て、且つ、その画像データを使用して、体内での空間的な関係及び向きを有する模擬ターゲットモデルを構成するように構成された画像システムと、
互いに対して既知の幾何学的形態で間隔を隔てられ、且つ、体内の前記マーカーからの信号を識別するように位置決めされ、前記マーカーからのマーカー信号を測定し、マーカー測定信号を出すように構成された複数のセンサと、
前記センサーに連結されて、前記センサーからの測定信号を受け、測定信号及び画像データを使用して、(a)前記複数のセンサーに対する体内の前記ターゲットの実際の位置のターゲットモデルを決定し、(b)前記ターゲット内のターゲットアイソセンタを識別し、(c)ターゲットモデルと、ターゲットの放射線治療の準備に当たって模擬ターゲットモデルとを比較し、且つ整合させる指示を含むデータ演算ユニットと、を有する、放射線ターゲット整合システム。
【0110】
前記マーカーは、体に取付け可能な複数のマーカーのうちの一つであり、マーカーは、互いに特有の信号を発生させる、請求項52記載の放射線ターゲット整合システム。
【0111】
前記マーカーは、複数のマーカーのうちの一つであり、前記マーカーは、各々互いに軸線方向に並んでおらず、前記データ演算ユニットは、前記複数のセンサーに対するターゲットの三次元空間の位置並びに向きを識別するように構成される、請求項52記載の放射線ターゲット整合システム。
【0112】
放射線を体内の選択されたターゲットに送出する放射線送出システムと共に使用し、放射線は、放射線送出源から間隔を隔てたマシンアイソセンタに送出される、調節可能な患者支持組立体であって、
ベースと、
前記ベースに取り付けられた支持構造体と、
前記支持構造体及び/又は前記ベースによって支持され、互いに既知の幾何学的形態に配列され、体内のターゲットに対して選択された位置で体内に埋め込み可能な励磁可能なマーカーからの信号を測定し、信号測定データを出すように構成された複数のセンサーを有するセンサアレイと、、
さらに、前記センサーに連結されて、信号測定データを受け、信号測定データを使用して、前記ターゲットの位置を決定するように構成されたデータ演算ユニットと、
前記支持構造に連結されて、前記支持構造体を選択的に移動させ、前記データ演算ユニットに連結されて、前記ターゲットを前記マシンアイソセンタと一致して位置決めするように、前記データ演算ユニットからの情報に応答して移動可能である移動制御デバイスと、を有する、調節可能な患者支持組立体。
【0113】
放射線送出源からターゲットに放射線を当てるために、体内の選択されたターゲットを識別し、追跡する方法であって、
マーカー信号を生じさせるように、外部励磁源によって励磁可能であるマーカーを、ターゲットに対して体内に埋め込むステップと、
前記埋め込んだマーカーを前記外部励磁源で励磁して、マーカー信号を生じさせるステップと、
前記センサは、互いに対して既知の幾何学的形態に位置決めされ、マーカー信号に応答して測定信号を発生させる体外のセンサーでマーカー信号を測定するステップと、
前記センサーからの測定信号を使用して、前記ターゲットに対するマシンアイソセンタの位置を決定するステップと、
前記ターゲットが前記マシンアイソセンタと一致した状態で、前記放射線送出装置に対して体を位置決めするステップと、
放射線を、前記放射線送出装置から、前記マシンアイソセンタ及び前記ターゲットに当てるステップと、を有する方法。
【0114】
さらに、複数のマーカーを、前記ターゲットに対して選択した位置及び向きで体内に埋め込むステップを有し、各マーカーは、前記外部励磁源によって励磁されて、それぞれのマーカーに特有の識別可能なマーカー信号を生じさせることができ、
さらに、前記埋め込んだマーカーを前記外部励磁源で励磁させて、識別可能な特有のマーカー信号を生じさせるステップと、
前記埋め込んだマーカーの各々からのマーカー信号を、体の外部の前記センサーで測定するステップと、
体内の前記ターゲット内の前記ターゲットアイソセンタの位置を、前記マーカー信号の前記センサーによる測定値に基づいて決定するステップと、を有する、請求項56記載の方法。
【0115】
前記センサーに対する体内のターゲットの位置及び向きを決定するステップを更に有する、請求項56記載の方法。
【0116】
前記マーカーは、或る信号強度を有するマーカー信号を発生させ、マーカー信号を測定するステップは、マーカー強度を各センサーで測定するステップを含む、請求項56記載の方法。
【0117】
コンピュータ制御装置に連結された監視システムを提供するステップと、
互いに対するマシンアイソセンタ及びターゲットアイソセンタの位置についての、前記コンピュータ制御装置からのフィードバックを、前記監視システムに与えるステップと、を更に有する、請求項56記載の方法。
【0118】
前記監視システムは、表示装置部分を含み、フィードバックを提供することは、前記表示装置部分に、互いに対するターゲット及びマシンアイソセンタの位置の視覚的な表示を提供することを含む、請求項60記載の方法。
【0119】
少なくとも三つのマーカーを、前記ターゲットに対して選択された位置で体内に埋め込むステップを更に有し、前記少なくとも三つのマーカーの各々は、互いに軸線方向に並んでいない、請求項56記載の方法。
【0120】
前記放射線送出源にほぼ隣接して選択された位置に、体を位置決めするステップを更に有し、その場合、
マーカー信号を測定し、前記ターゲットアイソセンタの位置を決定し、マシンアイソセンタの位置を決定し、かつ、前記ターゲットアイソセンタが前記マシンアイソセンタと一致するように、体を前記放射線送出装置に対して位置決めしすることが、体が前記放射線送出装置にほぼ隣接して選択された位置に位置決めされる前に、リアルタイムで行われる、請求項56記載の方法。
【0121】
前記ターゲットの照射中、前記マシンアイソセンタに対するターゲットアイソセンタの位置をリアルタイムで監視するステップと、前記ターゲットアイソセンタが前記マシンアイソセンタとの整合から外れて移動すれば、前記ターゲットの照射を中断するステップと、を更に有する、請求項56記載の方法。
【0122】
放射線療法を体内の選択されたターゲットに施す方法であって、
リード線なしのマーカーを、前記ターゲットに対して選択された位置で体内に埋め込むステップと、
前記埋め込んだマーカーを、体外の励磁源で励磁して、識別可能なマーカー信号を生じさせるステップと、
前記埋め込んだマーカーからのマーカー信号を、体の外部に、互いに既知の幾何学的形態で位置決めされたセンサーで測定するステップと、
マーカー信号の測定値に基づいて、放射線送出組立体のマシンアイソセンタに対するターゲットの位置を決定するステップと、
前記ターゲットが前記マシンアイソセンタと一致するように、前記放射線送出装置に対して体を位置決めするステップと、
放射線を、前記放射線送出装置から前記ターゲット及び前記マシンアイソセンタに当てるステップと、
放射線をターゲットに当てている間、前記マシンアイソセンタに対する前記ターゲットの実際の位置をリアルタイムで監視するステップと、を有する方法。
【0123】
電離放射線を選択したターゲットに送出するための治療上の作業を確立するための放射線治療計画方法であって、
体内の選択したターゲットの画像データを得るステップと、
励磁可能なマーカーを、ターゲットに対して選択された位置で体内に埋め込むステップと、
前記埋め込んだマーカーを外部励磁源で励磁して、体内に前記マーカーによる識別可能なマーカー信号を生じさせるステップと、
前記埋め込んだマーカーからのマーカー信号を、互いに既知の幾何学的形態に位置決めされた複数のセンサーで測定するステップと、
前記画像データから、体内のターゲットの前記ターゲットの形状及び空間的な向きを決定するステップと、
マーカー信号の前記センサーによる測定値に基づいて、体内の前記ターゲット内のターゲットアイソセンタを決定するステップと、
前記ターゲットの形状及び空間的な向きに基づいて、前記ターゲットに照射するための放射線線量及び送出の計画案を開発するステップと、を有する、方法。
【0124】
体を、体内のターゲット及び埋め込まれたマーカーで、放射線送出組立体に対して選択された位置に位置決めするステップを更に有し、前記放射線送出組立体は、集束した放射線を、前記放射線送出組立体から間隔を隔てられたターゲットアイソセンタに選択的に送出するように形成され、
さらに、前記複数のセンサーに対するマシンアイソセンタの位置を決定するステップと、
前記ターゲットが前記マシンアイソセンタ実質的に一致して、前記放射線送出装置に対して体を位置決めするステップと、
放射線を、前記放射線送出組立体から前記マシンアイソセンタに、及び前記ターゲットに送出するステップと、を有する、請求項66記載の方法。
【0125】
前記画像データに基づいて体に対して選択された位置及び向きで、三次元模擬ターゲットモデルを決定するステップと、
マーカー信号の測定値に基づいて、三次元の実際のターゲットを定めるステップと、
模擬ターゲットモデル及び実際のターゲットモデルの位置及び向きについてのフィードバック情報を出すフィードバックデバイスを提供するステップと、
放射線をターゲットに送出する前に、ターゲットと実際のモデルの向きを整合させるように体を移動させるステップと、を更に有する、請求項66記載の方法。
【0126】
放射線を体内のターゲットに送出するために、放射線送出装置に対して体を位置決めする方法であって、
体を移動可能な支持組立体上に位置決めするステップと、
励磁可能なマーカーを、体の外部励磁源で励磁するステップとを有し、前記マーカーは、前記ターゲットに対して選択した位置で体内に埋め込まれ、励磁した前記マーカーは、識別可能なマーカー信号を出し、
さらに、前記埋め込んだマーカーからのマーカー信号を、互いに対して、且つ前記支持組立体に対して既知の幾何学的形態に位置決めされた、体の外部の複数のセンサーで測定するステップと、
さらに、マーカー信号のセンサからの信号に基づいて、体内の前記ターゲット内にターゲットアイソセンタを決定するステップと、
前記放射線送出組立体の位置に基づいて、複数のセンサーに対するマシンアイソセンタの位置を決定するステップと、
前記ターゲットアイソセンタの位置と前記マシンアイソセンタの位置とを比較するステップと、
前記マシンアイソセンタに対して体を移動させて、前記ターゲットアイソセンタを前記マシンアイソセンタと一致して位置決めするステップと、を有する方法。
【0127】
前記複数のセンサは共通の平面に在り、前記マーカーは、共鳴励磁界に応答して共鳴磁気信号を生じさせるリード線なしのマーカーからなる、請求項69記載の方法。
【0128】
放射線ビームをビームアイソセンタに向ける放射源を有する放射線送出システムを使用する放射線療法における、患者内の治療ターゲットを位置確認し、追跡するための装置であって、
前記治療ターゲットに対して或る部位で患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動的に連結されたコンピュータと、を有し、前記コンピュータは、(a)放射線ビームで患者の少なくとも或る部分に照射し、(b)患者に照射しながら、前記センサーを使用して、前記マーカーの特性を検知し、(c)前記マーカーの検知された特性に基づいて、前記治療ターゲットの実際の位置を決定し、(d)患者が前記センサーに最も近い間、前記治療ターゲットの実際の位置を前記ビームアイソセンタとほぼ相関させるフィードバック情報を提供する方法をコンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、装置。
【0129】
放射線ビームをビームアイソセンタに向ける放射源を有する放射線送出システムを使用する放射線療法における、患者を追跡するための装置であって、
患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動的に連結されたコンピュータと、を有し、前記コンピュータは、(a)前記マーカーの特性を検知して、前記マーカーの位置に関する位置情報を得て、(b)位置情報に基づいて、前記マーカーの実際の位置を決定し、患者が、前記ターゲットの位置情報を得るセンサーに最も近い間に、前記マーカーの実際の位置のフィードバックを提供する方法をコンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、装置。
【0130】
放射線ビームをビームアイソセンタに差し向ける放射源を有する放射線送出システムを使用する放射線療法における、患者内を追跡するための装置であって、
患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動的に連結されたコンピュータと、を有し、前記コンピュータは、(a)前記マーカーの特性を検知して、前記マーカーの位置に関する位置情報を得て、(b)位置情報に基づいて、前記マーカーの実際の位置を決定し、前記マーカーを検知している間に、前記マーカーの移動を追跡する仕方で、前記マーカーの実際の位置のフィードバックを提供する方法をコンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、装置。
【0131】
放射線ビームを生じさせる放射源、患者支持体、及び前記患者支持体を移動させる駆動システムを有する放射線送出システムに関連して使用するための制御システムであって、 治療ターゲットに対して或る部位で患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動可能に連結されたコンピュータと、を有し、前記コンピュータは、(a)前記マーカーを検知して、前記マーカーの実際の位置に関する位置情報を得て、(b)前記マーカーの位置情報に基づいて、前記治療ターゲットの実際の位置を決定し、(c)前記治療ターゲットの実際の位置に基づいて、三次元での前記治療ターゲットと前記放射線ビームのビームアイソセンタとの間のずれを計算し、(d)前記治療ターゲットと前記ビームアイソセンタとの間のずれが、許容範囲を超えている場合に、患者支持台を自動制御によって移動させる方法を前記コンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、制御システム。
【0132】
放射線ビームを生じさせる放射源、患者支持体、及び前記患者支持体を移動させる駆動システムを有する放射線送出システムに関連して使用するための制御システムであって、 治療ターゲットに対して或る部位で患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動可能に連結されたコンピュータと、を有し、前記コンピュータは、前記ワイヤレスのマーカーを前記センサーによって検知することができるように、患者が前記患者支持体上に置かれている間に、前記コンピュータに、方法を実行させる指示を含むコンピュータ作動可能媒体を有し、前記方法は、(a)前記ワイヤレスマーカーの位置及び/又は向きについての位置情報を前記センサーから得て、(b)前記センサーから得られた前記位置情報に基づいて、前記治療ターゲットの実際の位置を決定し、(c)前記治療ターゲットと前記放射線ビームのビームアイソセンタとの間のずれ量を計算し、(d)前記治療ターゲットと前記ビームアイソセンタとの間の計算されたずれ量に基づいて、コンピュータにより、前記患者支持体を自動的に移動させ、且つ/又、前記放射線ビームを制御するのを含む、制御システム。
【0133】
放射線ビームを生じさせる放射源、患者支持体及び前記患者支持体を移動させる駆動システムを有する放射線送出システムに関連して使用するための制御システムであって、
治療ターゲットに対して或る部位で患者に埋め込まれるように形成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動可能に連結されたコンピュータと、を有し、前記コンピュータは、(a)前記マーカーを検知して、前記マーカーの実際の位置に関する位置情報を得て、(b)前記マーカーの検知された位置情報に基づいて、前記マーカーの実際の位置を決定し、(c)前記マーカーを検知しながら、前記マーカーの実際の位置に基づいて、コンピュータによって患者及び/又は患者の移動を自動的に処理するために、放射線ビームを制御する方法を前記コンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、制御システム。
【0134】
放射線ビームをビームアイソセンタに差し向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように形成された台及びその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータ作動可能な指示を有するコンピュータを有し、前記指示は、(a)前記マーカーの位置情報を検出し、(b)前記位置情報を使用して、基準フレームに対する前記マーカーの位置を決定し、(c)前記マーカーの位置と前記マーカーに対する所望のマーカーの位置との間のずれ量を計算し、その場合、前記マーカーが所望のマーカー位置に在るときに、前記ターゲットは前記基準フレーム内の所望の原位置に位置決めされる方法を前記コンピュータに実行させる、装置。
【0135】
放射線ビームをビームアイソセンタに差し向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台及びその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータ作動可能な指示を有するコンピュータと、を有し、前記指示は、(a)前記マーカーの位置情報を検出し、(b)前記マーカーの位置情報を使用して、基準フレームに対するターゲットの位置を決定し、(c)前記基準フレーム内の、前記ターゲットの位置と前記ターゲットの所望の位置との間のずれ量を計算する方法を前記コンピュータに実行させる、装置。
【0136】
放射線ビームをビームアイソセンタに差し向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台とその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータ作動可能な指示を有するコンピュータと、を有し、前記指示は、(a)前記マーカーを検知して、前記マーカーの位置に関する位置情報を得て、(b)位置情報に基づいて、前記マーカーの実際の位置を決定し、(c)前記ターゲットと前記ビームアイソセンタとの間のずれ量が許容範囲を超えているならば、前記マーカー実際の位置に従って患者を移動させ、(d)前記検知及び決定作業を繰り返すことによって、前記ビームアイソセンタに対して前記ターゲットを追跡する方法を前記コンピュータに実行させる、装置。
【0137】
放射線ビームをビームアイソセンタに向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台とその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータ作動可能な指示を有するコンピュータと、を有し、前記指示は、(a)前記マーカーを検知して、前記マーカーの位置に関する位置情報を得て、(b)位置情報に基づいて、前記マーカーの実際の位置を決定し、(c)前記マーカーの実際の位置に従って患者を移動させて、前記ターゲットと前記ビームアイソセンタとの間のずれ量を減じ、(d)患者を移動させながら、前記検知及び決定作業を繰り返すことによって、患者の移動中、前記ビームアイソセンタに対して前記ターゲットを追跡する方法を前記コンピュータに実行させる、装置。
【0138】
放射線ビームをビームアイソセンタに差し向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台とその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータと、を有し、該コンピュータは、(a)基準フレームに対して前記ターゲットの所望の原位置のターゲット座標を含むメモリーと、(b)(i)三次元マーカー座標を決定し、(ii)前記三次元マーカー座標に基づいて前記ターゲットの実際の位置を計算し、(iii)前記ターゲットの実際の位置とターゲット座標との間の三次元のずれ量を計算する方法を前記コンピュータに実行させるコンピュータ作動可能な指示を含む、装置。
【0139】
放射線ビームをビームアイソセンタに向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台とその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータと、を有し、該コンピュータは、(a)前記ビームアイソセンタに対する前記ターゲットの所望の原位置を含むメモリー、及び、(b)(i)前記センサーから得られた前記マーカーの位置情報に基づいて、三次元マーカー座標を決定し、(ii)三次元マーカー座標と前記マーカーに対する所望のマーカー位置との間のずれ量を計算し、その場合に前記マーカーが前記所望のマーカー位置に位置決めされているときに、前記ターゲットを前記所望の原位置に位置決めする方法をコンピュータに実行させるコンピュータ作動可能な指示を含む、装置。
【技術分野】
【0001】
この発明は、概略的に放射線療法装置に関し、より詳細には、誘導放射線療法が施される体内のターゲットを正確に位置確認し、且つ追跡するための装置及び方法に関する。
【背景技術】
【0002】
放射線療法における最近の進歩は、限局性癌の効果的な治療の新しい達成方法を提供している。これらは、三次元等角外部ビーム放射、強度調整放射線療法(IMRT,intensity modulated radiation therapy)、及び、定位X線撮影法及び小線源治療を含む。これらの新しい物理治療法は、より多くの線量の放射線を腫瘍に送出し、その多くの線量は、標準の外部ビーム放射線療法と比較したときに、それらの高い有効性の源泉である。
【0003】
放射線療法を用いた限局癌の管理の継続した改善を達成するために、放射線療法に対して線量応答関係がほとんどの癌について存在するから、更なる線量の漸増が必要である。しかしながら、送出する放射線の線量が増加すれば、照射される隣接した正常組織の量を減じる対策が講じられない限り、健常組織に対する合併症の可能性が増加する。有効な放射線療法は、放射線の全線量と、腫瘍の周りの照射された正常組織の体積の両方に依存する。したがって、放射線の線量を増やすと、有効な放射線治療の均等割合を保つために、照射される隣接した正常組織の量を減らさなければならない。
【0004】
照射される隣接した正常組織の量を減ずるために、処方した放射線の十分な線量を受けるターゲットの周りの健常組織の領域である窮屈な治療マージンと共にターゲットに放射線を処方しなければならない。例えば、前立腺癌のための治療マージンが広すぎれば、そのマージンは多少の直腸、膀胱及び球状の尿道組織を含む。これらの重要な組織を含まないマージンを提供することが非常に望ましい。
【0005】
治療マージンが全く無いことが理想である。しかしながら、既存の装置による初期の放射線療法のセットアップ及び放出中の日々の変化のために、多少のマージンは必要である。マージンはまた、患者の外部分が不動のままのときでさえ起こることがある、患者の体内でのターゲットの潜在的な内部移動に適応するために必要であった。放射線療法中、前立腺内の腫瘍の移動が主として患者の呼吸により、また直腸及び膀胱の自然な充満及び排泄により起こることを幾つかの研究が立証し、計量した。多少の治療マージンがないと、腫瘍そのものが治療体積の外に移動する可能性がある。
【0006】
さらに、放射線ビームが最初からターゲットを外れるように患者がセットアップされるならば、或いは、治療中ターゲットが移動すれば、ビームはより多くの正常組織に当たり、正常組織の付随的な損傷を増大させ、並びに、ターゲットの線量を潜在的に不足させる。正常組織の付随的な損傷をできるだけ防止することが非常に望ましい。かくして、現在の患者のセットアップ操作で線量漸増が試みられるとき、放射線治療のセットアップ及びターゲットの移動の日々刻々の変化、及びターゲットの移動が、重大な挑戦を提起する。
【0007】
現在の患者のセットアップ操作は、患者の身体上の外部基準マークと、放射線放出装置用の視覚的な整合誘導との整合に頼っている。一例として、X線装置、コンピュータ断層撮影(computerized tomography,CT)装置、核磁気共鳴画像(magnetic resonance imaging,MRI)装置、又は超音波装置のような、映像装置を用いて、患者の体内の腫瘍を確認する。体内の腫瘍の近似位置が、患者の体の外部の二つ以上の整合点と整合され、整合点を示すために、外部マークが患者の皮膚に書かれる。
【0008】
放射線治療のための患者セットアップ中、外部マークが、放射線放出装置の基準システムと整合される。このセットアップ操作は、マシンアイソセンタとして知られた、体内の治療ターゲット(又は患者)のアイソセンタを、放射線ビームを合焦させる空間内の位置に正確に位置決めしようとする。治療ターゲットをマシンアイソセンタに関して正確に位置決めすることによって、体内の患者有効治療体積が、放射線療法の治療計画位置に正確に登録(又は位置決め)される。しかしながら、ターゲットが外部のマークに対して移動したらならば、外部の整合装置及びマークが適正に整合されても、ターゲットがマシンアイソセンタからずれてしまう。したがって、医者及び技術者は、ターゲットがマシンアイソセンタに対して実際にどの程度移動したのか分からない。一例として、研究が、連続した二日間で1.6cmに達するターゲットの変位を証明した。患者の呼吸及び鼓動のため、非常に短時間での肺腫瘍の実質的なターゲットの変位も証明された。かかるターゲットの内部移動は、治療の放出における不正確さを引き起こすことがあり、そのため、健常組織の広いマージンが、ありそうな内部ターゲット運動を補償するように処方され、且つ照射される。
【発明の開示】
【課題を解決するための手段】
【0009】
本発明の一つの側面では、放射線療法のための準備中及び放射線療法中に、体内のターゲットの実際の位置を正確に位置確認し、且つ追跡するためのシステム及び方法を提供する。一つの実施形態では、ターゲットが放射線送出源のマシンアイソセンタに位置決めされるときに、システムを、選択された線量の放射線を体内のターゲットに送出する放射線送出源と一緒に使用することができる。システムは、ターゲット内又はその上のように、ターゲットに対して選択された位置で、体内に又はその上に固定できるマーカーを有する。マーカーは、体内又は体の上に取り付けられながら識別可能な信号を生じさせるように、外部励磁源によって励磁できる。複数のセンサーを有するセンサーアレイが体の外に設けられ、センサーは互いに対して知られた幾何学的関係で間隔を隔てられる。
【0010】
データ演算ユニットが、センサーアレイに連結され、センサーによる測定値を使用して、マーカーの実際の位置と、センサーに対するターゲット内のターゲットアイソセンタを決定するように構成される。基準マーカーも、装置のマシンアイソセンタに対して既知の位置で、放射線放出装置に連結される。基準マーカーは、センサーアレイに対して基準マーカーの位置及びマシンアイソセンタを決定するための測定可能な信号を出す。データ演算ユニットは、ターゲットアイソセンタの位置と、マシンアイソセンタの位置とをリアルタイムで比較して、患者が、放射線療法にとって適正にセットアップされたか否かを決定する。
【0011】
本発明の別の側面では、監視システムが、データ演算ユニットに連結され、マシンアイソセンタに対するターゲットアイソセンタの実際の位置についてのフィードバック情報を提供するように形成されたフィードバック部分を有する。一つの実施形態では、フィードバック部分は、マシンアイソセンタ及びターゲットアイソセンタの互いに位置の視覚的及び/又は数値的な表示を提供する。次いで、この表示を、治療前に又は治療中にターゲットアイソセンタの位置を調節するのに使用することができる。別の実施形態では、フィードバック部分は、マシンアイソセンタに対してターゲットアイソセンタの軸時間の移動の視覚的な及び又は数値的な表示を提供する。さらに、フィードバックデータを、許容限度を超えた患者又はターゲットの移動をオペレータに自動的に警告するのに使用することができる。第三の実施形態では、フィードバックデータを使用して、正常な(即ち、呼吸)又は計画されていない患者の動きに対して、放射線療法の治療を自動的に調節し、制御し(gate)、又は停止することができる。
【0012】
本発明の別の側面では、調節可能な患者支持組立体を、追跡監視システムと組み合わせて、放射線放出システムと一緒に使用する。支持組立体は、ベースと、そのベースに移動可能に取り付けた支持構造体と、ベースに対して支持構造体を選択的に移動させるために支持構造体に連結された移動制御装置と、を有する。互いから間隔を隔てられた複数のセンサーは、ベースに対して一定位置でベースに連結される。データ演算ユニットは、センサーに連結され、ターゲット内の又はその直ぐ近くの一つ以上のマーカーからの信号測定データを受ける。データ演算ユニットは、各マーカーについて信号測定データを使用して、ターゲット内のマーカー及びターゲットアイソセンタの正確な位置を決定するように構成される。データ演算ユニットは、マシンアイソセンタに対してターゲットアイソセンタの位置を識別するように形成される。移動制御装置は、データ演算ユニットに連結され、そのデータ演算ユニットからのデータに応答してターゲットアイソセンタをマシンアイソセンタと一致して位置決めするようになっている。
【0013】
本発明の別の側面では、方法が、放射線治療を体内の選択されたターゲットに施すために提供される。本方法は、励磁可能なマーカーを、ターゲットに対して選択された位置に位置決めし、埋め込んだマーカーを体の外の励磁源で励磁して、識別可能なマーカー信号を生じさせ、そして、互いに対して既知の幾何学的形態に位置決めされた、体の外の複数のセンサーでマーカーからのマーカー信号を測定する。本方法はまた、センサーからのマーカー信号の測定値に基づいてセンサーに対する体内のマーカーの位置及びターゲットアイソセンタを決定することを含む。さらに、本方法は、センサー及びターゲットアイソセンタに対する放射線放出組立体のマシンアイソセンタの位置を決定し、ターゲットアイソセンタとマシンアイソセンタとが一致するように、放射線放出装置に対して体を位置決めすることを含む。次いで、放射線療法は、放射線放出装置からターゲットアイソセンタを中心にした治療体積まで送出される。
【0014】
本発明の更に別の側面では、放射線療法を体内のターゲットアイソセンタのところで治療体積に施すために、放射線放出装置に対して体を位置決めするための方法が提供される。体はその中に選択されたターゲットを有し、少なくとも一つの励磁可能なマーカーがターゲットに対して既知の位置に位置決めされる。本方法は、複数のセンサーに隣接した可動支持組立体上で体を位置決めすること、及び、体外の励磁源で励磁マーカーを賦勢することを含む。励磁されたマーカーは、識別可能なマーカー信号を出す。マーカー信号は、体の外で、互いに対して、且つ可動支持組立体に対して既知の幾何学的形態に配置された複数のセンサー測定される。治療体積内のマーカー及びターゲットアイソセンタの位置は、センサーによるマーカー信号の測定に基づいて決定される。ターゲットアイソセンタの位置も、複数のセンサー及び機械アイソセンサーに対して決定される。ターゲットアイソセンタの位置とマシンアイソセンタの位置とを比較して、二つのアイソセンタが互いに一致しなければ、支持組立体の部分が、ターゲットアイソセンタとマシンアイソセンタとを一致させるように、体及びターゲットを移動させる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態によるターゲットの探出し及び監視システムの概略側面図である。励磁性のマーカーは、患者の体内のターゲット内に又はターゲットに近接して埋め込まれて示され、センサーアレイは、患者の外に示され、放射線放出装置は、体内のターゲットに放射線療法を施す位置に示されている。
【図2】可動支持台上の患者の概略平面図であり、埋め込まれたマーカー、ターゲット及びセンサーアレイを隠れ線で示す。
【図3】図1に示したシステムに使用可能な単一軸マーカーの一実施形態の拡大側面図である。
【図4】図1のシステムに使用可能な三軸マーカーの一実施形態の拡大側面図である。
【図5】図1のシステムに使用可能な三軸マーカーの他の実施形態の拡大等角図である。
【図6】ターゲット、そのターゲット内に又はそのターゲットの近くに埋め込まれた三つのマーカー、外部励磁源、センサーアレイ、及び、図1のシステムにおけるコンピュータ制御装置の拡大部分概略図である。
【図7】図1のシステムにおけるセンサーアレイの別の実施形態の概略等角図である。
【図8】二つのセンサーに対するマーカーの位置を決定するためのデータを表す、二つの交差する球の幾何学的な表示である。
【図9】四つのセンサーに対するマーカーの位置を決定するためのデータを表す、四つの交差する球の幾何学的な表示である。
【図10】第一の位置に仮想線で示され、体内の異なる位置である第二の位置に実践で示される、体内のターゲットの概略等角図である。
【図11】表示画面上に仮想線で示された模擬ターゲット、模擬マーカー、及び模擬ターゲットアイソセンタ、及び、表示画面上に実線で示された実際のマーカー位置及びターゲットアイソセンタ位置を示す、図1の監視システムの拡大等角図である。
【図12】模擬ターゲット及び実際のターゲットが互いに整合して示され、マシンアイソセンタとターゲットアイソセンタが互いに一致した、図11の監視システムの等角図である。
【図13】監視システム上に示されたターゲット及びマーカーの模擬等角図であり、ターゲットは、第一ターゲット条件で示されている。
【図14】ターゲットがターゲットの大きさ及びマーカーに対して条件の変化を表す第二条件で示されている、図13のターゲット及びマーカーの模擬等角図である。
【図15】表面マーカーが、互いに且つターゲットと整合して、患者の体の外面に取り付けられた、本発明の別の実施形態の側面図である。
【図16】図15の表面取付マーカーを取り付けた患者の全部の平面図である。
【図17】図1のシステムを利用して、放射線療法をターゲットに施すための放射線放出操作の概略フロー図である。
【発明を実施するための最良の形態】
【0016】
図1乃至図17は、本発明の実施形態による、体内のターゲットを位置確認し、追跡し、且つ監視するためのシステム及び幾つかの構成要素を示す。システム及び構成要素は、誘導放射線療法のような、選択された治療をターゲットに適用するために、ターゲットを位置確認し、追跡し、監視し、そして評価するのに使用できる。図1乃至図17を参照して以下に説明する構成要素の幾つかも、本発明の側面による方法を実施するためのシステムに使用することができる。したがって、種々の図に亘って、同じ参照番号は同じ構成要素及び特徴を指す。
【0017】
図1及び図2を参照すると、本発明の一つの側面は、誘導放射線療法を、患者16の体14の中の腫瘍のようなターゲット12に施す際に使用できるように構成されたシステム10を提供する。このシステム10により、電離放射線療法を放射線送出源18からターゲットに送出しながら、ターゲット12を患者の体14の中で位置確認し、実際の位置をリアルタイムで監視する。呼吸、器官の充満及び排出、又は他の内部運動のため、ターゲット12は体14の中で移動する。放射線ビームに対してターゲットの運動を追跡し、監視して、ターゲット12への放射線の正確な照射、及び、必要であれば、ターゲットの周りの最小のマージンだけを保証する。本システム10は、腫瘍又は他のターゲットに関する放射線のための誘導放射線療法と関連して以下に説明されるけれども、本システムは、例えば、他の治療目的の又は診断目的で、体内の他のターゲットを追跡し、且つ監視するのに使用することができる。
【0018】
図示した実施形態(図1)の放射線送出源18は線形加速器として知られた電離放射線装置であるが、いかなる放射線療法放出装置でもよい。カリフォルニア州パロアルト(Palo Alto)のバリアン・メディカル・システムズ社(Varian Medical Systems, Inc.)、ニュージャージー州イセリン(Iselin)のシーマンス・メディカル・システムズ社(Siemans Medical Systems Inc.)、ニュージャージー州イセリンのエレクタ・インスツルメンツ社(Electa Instruments, Inc.)、又は、日本の三菱電機株式会社によって製造されたこのような装置を含む他の放射線療法放出装置を使用することができる。このような装置は、在来の単部門又は多部門放射線療法、3D等角放射線療法(3D CRT、3D conformal radiation therapy)、逆変調放射線療法(IMRT、inverse modulated radiation therapy)、定位放射線療法(stereotactic radiotherapy)、トモセラピー(tomo therapy)を果たすのに使用される。これは、種々の治療計画ソフトウエアシステムと関連して行われる。
【0019】
放射線送出源18は、ゲートで制御され或いは形成された電離放射線ビーム19を、可動ガントリー20から、ガントリーから離れた位置の点を基準とした領域又は体積に送出する。マシンアイソセンタ22と称される空間内のこの点は、電離放射線19を、産業標準治療計画手順によって決定されるように形成する点である。電離放射線がターゲットに正確に送出されるように、システム10により、ターゲット12をマシンアイソセンタ22に対して正確に位置決めさせることができる。システムによりまた、ターゲットを取り囲む健常組織の付帯的な損傷を最小にするように、放射線療法中、マシンアイソセンタに対するターゲットの実際の位置を監視させることができる。
【0020】
図示したシステム10は、ターゲット12内に又はターゲット12に隣接して位置し、体内のターゲットの実際の位置をマークする、複数のマーカー30を有する。したがって、マーカー30は、体30内、体上又は体30近くのマーカーである。一例では、マーカー30を、治療アイソセンタに対する既知の位置で、患者固定装置に取り付けるのがよい。マーカー30は、患者の体14の外部に位置決めされた励磁源32によって、賦勢され、或いは励磁される。マーカー30が励磁されると、マーカー30は、各々、選択された特有の周波数で共鳴し、体14の外から測定可能な低エネルギーの無線周波数磁気信号を発生させる。マーカー30からの信号は、患者の体14の外部に置かれたセンサー36のアレイ34によって検出され、且つ測定される。センサー36は、互いに対して、一定の選択された幾何学的形態に配置され、その結果、アレイ34は、位置及び運動が計算される一定の基準座標形を構成する。センサー36は、各センサー36から測定情報を受け、且つそのセンサーに対して患者の体14の中のマーカー30の実際の位置を決定するコンピュータ制御装置38に作動的に連結される。
【0021】
一実施形態では、コンピュータ制御装置38は、共鳴するマーカーからセンサー36による信号測定値に基づいて、ターゲット12内のターゲットアイソセンタ40の位置を定め、これを決定するのに使用されるアルゴリズムを有する。他の実施形態では、ターゲット12内のターゲットアイソセンタ40の位置が選択され、コンピュータ制御装置38は、選択されたターゲットアイソセンタに対する各マーカー30の位置及び/又は向きについての位置情報を利用する。ターゲットアイソセンタ40は、治療計画手順によって決定された通り、成形された放射線線量が配置され又は差し向けられる点又は位置である。一つの実施形態では、センサ36は、センサアレイ34に対して患者の体14の中のターゲットアイソセンタ40の実際の位置を追跡するために、毎分12回以上ポーリングされる。したがって、患者がセンサアレイ34に隣接して位置決めされると、ターゲット12及びターゲットアイソセンタ40の実際の位置をリアルタイムで監視することができる。
【0022】
ターゲットアイソセンタ40の実際の位置は、センサアレイ34に対するマシンアイソセンタ22の位置と比較される。図示したシステム10は、線形加速器のガントリー20に、又は他の実施形態で使用される放射線療法放出装置の他の選択された位置に位置決めされた基準デバイスを有する。これらの他の実施形態では、他の放射線療法放出装置は、コバルト機械(cobalt machines)、ガンマナイフ(Gamma Knife)、サイバーナイフ(cyberknife)、専門ステレオ定位放射線療法装置(specialized stereostatic radiotherapy devices)、又は、(CTスキャナーに線形加速器を利用する)断層CT組立体(TomoCT assembly)を含む。基準装置42は、マシンアイソセンタ22に対して既知の空間的又は幾何学的関係に位置決めされる。一つの実施形態における基準装置42は、アレイ34のセンサ36によって検出できる測定可能な信号を出す、共鳴する三軸の単一周波数マーカーである。他の実施形態では、基準装置42を、ガントリー20から離れた遠隔位置に配置することができる。いずれの実施形態でも、センサアレイ34に対する基準装置42の位置を決定するときに、センサアレイに対するマシンアイソセンタ22の位置を計算することができる。センサー36は、基準装置42に付いての測定データをコンピュータ制御装置38に与え、コンピュータ制御装置は、センサアレイ34に対するマシンアイソセンタ22の位置を計算する。
【0023】
センサアレイ34に対するターゲットアイソセンタ40の位置は、センサアレイに対するマシンアイソセンタ22の位置と比較される。ターゲットアイソセンタ40及びマシンアイソセンタ22が空間的に不整合であり、二つのアイソセンタが互いに三次元的に一致しなければ、患者16及び又はターゲット12を、マシンアイソセンタ22に対して移動させることができる。ターゲット12の位置は、ターゲットアイソセンタ40がマシンアイソセンタ22と一致するまで移動される。一旦、ターゲットアイソセンタ40及びマシンアイソセンタ22が許容可能に整合されると、放射線送出源18を作動して、ターゲットアイソセンタを基準とする電離放射線ビーム19を出し、それによって、ターゲット12を取り囲む健常組織に対して付帯的な損傷を最小にし、或いは排除しながら、ターゲットに放射線療法計画に従って照射することができる。ターゲットアイソセンタがマシンアイソセンタ22に対して許容できない量移動しないようにし、且つ、ターゲットアイソセンタとマシンアイソセンタとが許容変位限度内であるときに治療できるように、ターゲットアイソセンタ40の実際の位置も、放射線療法中、リアルタイムで監視することができる。
【0024】
図示した実施形態では、システム10も、フィードバックデータを、システム及び/又は放射線放出装置18を操作する医師又は技師のためのユーザーインターフェイスに与える、コンピュータ制御装置38に連結された監視組立体44を有する。一例として、監視組立体44は、フィードバックデータを、患者が放射線療法のためにセットアップされ、且つ位置決めされているときに、リアルタイムで、マシンアイソセンタの位置に対する三次元空間内のターゲットアイソセンタの位置の視覚的な表示として与える。監視組立体44はまた、例えば、セットアップ完了の確認、図形情報、患者情報、放射線療法計画の情報、又は誘導放射線療法の工程中に利用可能な他の情報を有する他のフィードバックデータをユーザインタフェースに与えることができる。
【0025】
図3乃至図5は、システム10で使用可能な、他の実施形態の励磁可能なマーカー30を示す。図3に示すマーカー30の一つは、導電性巻き線48によって包まれたフェライトコア46を有する埋め込み可能な単一軸の共鳴マーカー31であり、巻き線は小さいコンデンサー50に接続される。マーカー31は、電磁界を発生させる外部励磁源32によって賦勢されるように構成される。この電磁界により、マーカー31を所定の周波数で共鳴させ、それによって、体の外側からセンサー36(図1参照)によって測定されるのに十分な強度の信号を出す。患者に永久的に埋め込むことができる小さい自給式のワイヤレスの励磁可能なマーカー31を提供するために、生物学的に不活性な被覆52がフェライトコア46、巻き線48及びコンデンサー50を包む。この実施形態では、マーカー31は、マーカー信号の発生又は通信のための外部のエネルギー源とワイヤーを介して物理的に接続される必要がないから、マーカー31は「ワイヤレス」である。一つの実施形態では、マーカー31は、約5mmにすぎない長さ、及び、アプリケーター針に嵌るように寸法決めされた直径を有する。他の実施形態では、マーカー31は、マーカー信号の好ましい形成のために、必要に応じて異なる寸法を有することができる。
【0026】
図4に最も良く示すように、別の或る励磁マーカー30は、三つのシグナル部分54を有する、三軸のワイヤレス共鳴マーカー52からなる。各シグナル部分54は、他の二つのシグナル部分と垂直な軸線方向に位置決めされる。したがって、三つのシグナル部分54は、X、Y、Z基準座標系を構成する。シグナル部分54の各々は、フェライトコア46と、フェライトコア46の周わりの巻き線48と、各巻き線に接続された小さいコンデンサー50と、を有する。各シグナル部分は、外部励磁源32によって賦勢され、他の二つのシグナル部分の共鳴周波数と異なる周波数で共鳴するように形成される。
【0027】
一つの実施形態では、図4に示すように、三軸マーカー52は生物学的に不活性な被覆56を有し、その結果、マーカーを患者の体内に永久的に埋め込むことができる。マーカー52に外部励磁源32によって賦勢されると、各々のマーカーのシグナル部分が、その選択された周波数で共鳴して、測定可能なマーカー信号を或る強度で出し、その結果、マーカー信号を、センサアレイ34(図1参照)によって各々測定することができる。コンピュータ制御装置による周波数多重化により、コンピュータ制御装置38に、センサアレイに対するマーカーの位置及び向きを計算するときに、マーカーの異なるシグナル部分からのマーカー信号を区別させる。
【0028】
図5に最も良く示すように、他の実施形態のマーカー30は、単一のフェライトコア60と、マーカーについてX、Y及びZ軸線方向を定めるように、互いに垂直な軸線方向に配向された三組の巻き線62と、を有する立方体形状のマーカー58からなる。各巻き線62は、小さいコンデンサー64に接続され、他の二つの巻き線と湖異なる周波数で共鳴するように構成される。したがって、立方体形状のマーカー58も、ワイヤレスの三軸の共鳴マーカーである。
【0029】
一つの実施形態では、ワイヤレスの励磁可能なマーカー30が共鳴して、およそ10kHz乃至200kHz周波数範囲内で測定可能な信号を出す。他の実施形態では、マーカー30を、測定可能で識別可能なマーカー信号を生じさせるために十分な電力を提供するバッテリーのような電源を有する、自給式の動力マーカーである。他の実施形態では、マーカー30は、マーカーに特有のマーカー信号を発生させる選択された電源又は励磁源に電線を介して接続できる「有線」マーカーである。マーカー信号は、周波数の関数(即ち、周波数多重)として、時間の関数、即ち時分割多重として、唯一である。
【0030】
選択された適用では、単一のマーカー31、好ましくは、単軸マーカーが、ターゲット12内に埋め込まれ、単一の共鳴マーカーからの信号の強度が、センサアレイ34に対してターゲット位置情報を決定するのに使用される。別の実施形態では、二つ、三つ又はそれ以上のマーカーが、ターゲット内又はターゲットに隣接した既知の位置に埋め込まれる。各マーカー30は、他のマーカーに対してその特有の信号を生じさせ、その結果、センサアレイ34は、周波数多重によって、マーカーを区別する。センサアレイ34は、マーカー30からの特有の信号の強度を測定する。信号強度測定値は、(以下により詳細に論ずる)幾何学的な計算に使用するために変換されて、実際の三次元位置(X、Y、Z)と、或いは、センサアレイ34に対してマーカーの角度向き(縦揺れ角、偏揺れ角、横揺れ角)とを正確に決定する。
【0031】
図1を再び参照すると、システム10は、マーカー30を励磁するための磁界を発生させる励磁源32を有する。励磁源は、ターゲット12に対して、選択された位置で、且つ、マーカー30に十分近く位置決めされているので、放出された磁界は、マーカーを良好に賦勢するのに十分な強度を有する。図示した実施形態では、複数のマーカー30が、ターゲット12内に又はターゲット12に隣接してに患者の体14の中に永久的に埋め込まれる。一つの実施形態では、コンピュータ制御装置38は、それぞれのマーカーを選択された周波数で選択的に励磁するように、マーカー30ごとに励磁源32のための別々の駆動回路を提供する。一つの実施形態では、励磁源32は、X、Y及びX軸線方向に三次元磁界を発生させる三次元のAC磁界源である。この励磁源32は、各マーカー30について一つのソースコイルを提供し、ソースコイルを通って駆動された電流が、それぞれのマーカーに同調されたAC磁気波形を発生させる。別の実施形態では、励磁源32中のソースコイルは、それぞれのマーカー30のための多重の又は走査された励磁周波数磁界を発生させるように構成されたコイルによって作られる。
【0032】
図6及び図7は、体の外部に位置決めでき(図6参照)、ターゲットの12の中に、又はその近くに位置決めされたマーカー30から間隔を隔てたセンサアレイ34の概略等角図である。これらの図示した実施形態では、三つのマーカー30が、ターゲット12の中に、又はその近くに埋め込まれて示される。図6に見えるように、センサアレイ34は、複数のセンサ36を基準座標系X、Y又はZに沿って互いに対して一定の既知の幾何学的形態で支持するフレーム70を有する。フレーム70上の各センサ36の位置は基準座標系72に対して固定されて、コンピュータ制御装置38によって使用される測定データを得るための一定の基準点を定める。図6の実施形態では、フレーム70は、センサが単一平面に位置決めされるように、センサ36を支持する。図7の実施形態では、フレーム70は、二つの直交する平面でセンサ36を支持するように形成され、従って、センサ36は、基準座標系72のX、Y及びZ軸に沿って配向される。したがって、センサアレイ34は、測定値が得られる固定基準構造を成し、計算が実行されて、ターゲット12、ターゲットアイソセンタ40及びマシンアイソセンタ22の相対位置が決定される。
【0033】
図6及び図7の図示した実施形態は、「ワイヤレス」マーカー30を利用し、その結果、周波数多重が、異なるマーカーからの信号を識別するのに利用される。各センサ36は、X、Y及びZ軸に対して、マーカー30のそれぞれ一つからの絶対的なマーカー信号強度を測定する三軸センサーである。基準座標系の各軸に沿ったマーカー信号の絶対的な信号強度は、各マーカーのX、Y及びZ位置を決定するために、各マーカーのためのセンサ36によって測定される。
【0034】
磁界の強度は、励磁源からの距離の三乗に比例する割合で減少することが知られている。したがって、センサからのマーカーの距離を、マーカーの信号強度に基づいて決定することができる。マーカーから、互いに既知の位置に隔てられた一連のセンサまでの幾何学的な関係は、一つの特有の解で一連の方程式を解くのに使用される。したがって、マーカー30とセンサ36との間の距離は、それぞれのセンサーによって測定されたマーカーの信号強度に基づいて、コンピュータ制御装置38によって計算され、幾何学上の方程式に対する最も適当な解を求めて繰り返される。
【0035】
センサアレイ34に対する空間内のマーカー30の正確な位置を、そのマーカーと、アレイの互いに間隔を隔てられた少なくとも四つの別々の三軸センサとの間の距離に基づいて計算することができる。三軸センサからの距離の絶対的な大きさは、三軸大きさの各々(x、y及びz方向)を二乗し、その結果を合計し、最後に、距離の結果について平方根をとることによって決定される。一例として、一つのセンサ36とマーカー30の一つとの間の距離は、球の半径に幾何学的に相当する。図8は、別々のセンサ36によって各々定められた中心点102を有する二つの例示の球100を示す。二つの球100が交差するとき、交差は円104を定める。その結果、マーカーが、その円上の或る点に置かれていることが知られる。図9に示すように、三つの球100が交差するとき、交差は、マーカーがその線上に置かれる、二つの点105のうちの一つを定める。四つの球100が交差するとき、交差は、センサアレイ34に対する空間内のマーカー30の正確な位置に相当する空間内の単一点108を定める。
【0036】
ターゲット12内に埋め込まれた単一のマーカー30を使用する実施形態では、センサアレイ34は、空間内のそのマーカーの位置を決定するのに、たった四つの三軸センサ36を含めばよい。信号は周波数多重であり、多重周波数は各センサコイルで受けられ、各個々の周波数成分は、制御電子工学の高速フーリエ変換(first Fourier transform、FFT)で組み合わされた信号を処理することによって調べられので、多重マーカーは同じセンサーで位置確認される。ターゲット12の中又はターゲット12に近接して位置決めされた三つ以上のマーカー30を有する実施形態では、センサアレイ34は、基準座標系72に対して既知の幾何学的な向きに構成され、その結果、三組の三次元データ(単一軸マーカーからのx、y及びz)を使用することによって、基準座標系72に対する空間内の治療体積の角度向き(即ち、縦揺れ角、偏揺れ角、横揺れ角)を計算するために、コンピュータ制御装置38が、マーカー信号の測定値を、使用することができる。ターゲットに対するマーカー30の位置に基づいて、ターゲット12の位置及び角度向きを、コンピュータ制御装置38によって決定することができる。
【0037】
マーカーの信号を、多くの方法で、信号処理ソフトウエア又は電子装置を経て、励磁源32によって発生された信号から分離するのがよい。一つの実施形態では、励磁源32を「オン」にしてマーカーを励磁し、次いで、「オフ」にして、励磁源からの信号による干渉なしに、マーカーの応答の測定を可能にする。マーカー30は、励磁源32をセンサーの電気的なインダクタンス、容量及び直列抵抗によって決定される期間「オフ」にした後、共鳴し続ける。別の実施形態では、システムは、励磁源32がマーカー30の測定中「オン」のままである連続波(continuous wave、CW)で作動される。マーカー信号は、励磁源からの信号と位相が90°ずれているので、マーカー信号は、励磁信号から取り除かれる。励磁信号の零交差の時間は既知であり、変わらないマーカー信号は、その時間でそのピーク強度であろう。第三実施形態では、励磁源の信号の出力周波数は、マーカーの励磁を最大にするように、連続的に変えられ又は走査され、その結果、不要な励磁信号を最小にし、或いは除去しながら、マーカー信号を最大にする。
【0038】
ターゲット12及びターゲットアイソセンタ40に対する各マーカーの位置も計算され、或いは決定される。一つの実施形態では、ターゲット12内のターゲットアイソセンタ40は、CTスキャン、MRI、超音波システム、又は、核画像システム(nuclear imaging system)(例えば、陽電子放射断層撮影法)のような、画像システムによって提供された、ターゲットについての画像データに基づいて、最初に選択される。一旦、ターゲットアイソセンタ40が選択されると、埋め込まれた各マーカー30の位置は、ターゲットアイソセンタ40に対して測定される。次いで、ターゲットアイソセンタ40の位置は、基準座標系に対する各マーカーの位置を定めることに基づいて、基準座標系72に対して決定される。
【0039】
別の実施形態では、ターゲットアイソセンタ40は、ターゲット12に対するマーカーの位置の関数として定められる。マーカー30は、ターゲット12中に、又はターゲット12に隣接して選択的に位置決めされ、マーカーの向きは、ターゲットアイソセンタを定め、且つ計算するのに使用される。かくして、たとえマーカー30がターゲット12内に、或いはターゲット12のすく隣にさえ正確に埋め込まれていなくとも、ターゲット12内のターゲットアイソセンタ40を定め、その位置をマーカー30及び基準座標系72に対して決定することができる。しかしながら、ターゲットが移動すれば、ターゲットとマーカーがユニットと一緒に移動するように、マーカー30は、ターゲット12に十分近く位置決めされる。したがって、ターゲットの移動は、センサアレイ34に対するマーカーの移動を追跡をすることによって監視される。
【0040】
システム10は、リアルタイムで、ターゲット12の移動を追跡するように構成される。ターゲット12及びマーカー30を含む患者の体14の位置がセンサアレイ34に隣接して位置決めされ、且つ、マーカーが賦勢されるとき、コンピュータ制御装置38は、各センサ36からデータを獲得し、結果を毎秒およそ12回出力する。コンピュータ制御装置は、センサ36からの測定データを得て、五秒ごとに、センサアレイに対するターゲットアイソセンタ40の位置を計算する。別の実施形態では、コンピュータ制御装置38は、センサ36を測定して、センサアレイ34に対する特定のターゲットアイソセンタ40の運動をリアルタイムで監視することができる。最新測定速度は、測定ノイズを減じるのに十分なデータ平均化を可能にし、同時に、ユーザにとって十分な更新速度を可能にするように減じられるのがよい。
【0041】
図10は、ガントリー20の下で、センサアレイ34に隣接して、患者の体14を移動可能に支持する支持台76を有する本発明の側面を示す部分等角図である。支持台76は、マシンアイソセンタ22の下に位置決めできる。支持台76は、ターゲットアイソセンタ40がマシンアイソセンタと一致するまで、マシンアイソセンタ22に対する患者16の位置を調節するように移動できる。センサアレイ34は、支持台76の上、支持台76の下、或いは支持台76に置かれ、或いはこれに連結される。変形例として、センサアレイ34を、確認されるべきマーカー30(埋め込まれた、外部の、又は、ガントリーの)に十分に近い位置で、線形加速器のガントリーに取り付けられるのがよい。線形加速器に取り付けられたセンサアレイ34を有するこの変形例では、マシンアイソセンタ22からセンサアレイまでの位置が既知であり、その結果、別体のガントリーマーカー42を使用しなくてもよい。
【0042】
図1及び図10に最も良く見えるように、支持台76は、ベース88と、センサアレイ34に対して直線移動及び角移動可能にベースに移動可能に支持されたテーブル上面90と、を有する。マシンアイソセンタ22及びセンサアレイ34に対するテーブル上面及び患者16の移動を制御する移動制御システム78が、テーブル上面90に連結される。移動制御システム78はまたコンピュータ制御装置38に連結され、コンピュータ制御装置38は移動制御システム78を作動して、患者の直線位置又は角位置を調節するようにプログラムされている。一つの実施形態では、テーブル上面の位置は、移動制御システムを作動する、医師、物理学者又は技師のような、許可されたユーザに応答して、或いは、コンピュータ制御装置38によって与えられた指示に応答して自動的に移動する。
【0043】
一旦、ターゲットアイソセンタ40がマシンアイソセンタ22と一致するように、ターゲット12が位置決めされると、電離放射線を、ターゲット領域又は体積に直接、選択的に、且つ非常に正確に送出することができる。ターゲット12に対する放射線療法の適用を、ターゲットの周りに必要とされるマージンを潜在的に最小にしながら、正確な精度で選択された線量及び強度で行うことができる。一つの実施形態では、ターゲットアイソセンタ40の実際の位置は、放射線療法を施す間、実質的に連続的に監視され、且つマシンアイソセンタ22に対して追跡される。ターゲットアイソセンタ40が、変位距離の許容範囲を超えてマシンアイソセンタ22から離れるように移動すれば、コンピュータ制御装置38は、信号を放射線療法装置に与えて、ターゲットに対する放射線療法を中断させる。次いで、ターゲットアイソセンタ40がマシンアイソセンタ22と再び一致するまで、ターゲットの位置を手動で又は自動的に調節することができ、そして、放射線療法を再開することができる。一つの実施形態では、コンピュータ制御装置38は、ターゲットアイソセンタ40がマシンアイソセンタ22から移動しても移動距離が許容範囲を超えなければ、コンピュータ制御装置38が放射線療法を中断しないようにプログラムされる。この移動の範囲は、ターゲットの種類(例えば、前立腺、肺、肝臓)、ターゲットの大きさ、ターゲットの位置、ビームの形状/大きさ、及び放射線療法計画のような多くの要因に依存する。
【0044】
コンピュータ制御装置38に連結された監視組立体44によって、ターゲットアイソセンタの位置の追跡を容易にする。図11及び図12は、例として、マーカー30、ターゲットアイソセンタ40及びマシンアイソセンタ22の位置について、フィードバックデータをオペレータに提供する監視組立体44のフィードバック部分80を示す。フィードバック部分80は、画像、図形又は玄武情報をオペレータに提供する表示モニターである。
画像フィードバック装置、聴覚フィードバック装置、又は視覚フィードバック装置のような他のフィードバック部分80を、別の実施形態では使用することができる。一つの実施形態では、コンピュータ制御装置38は、体14の中のターゲット12の形状及び大きさを定める、例えば、CT、MRI又は超音波画像システムからの画像データを収容する。
画像データはまた、ターゲット12内の、又はその周わりの各マーカー30の位置を定める。コンピュータ制御装置38は、画像データを使用して、ターゲット、マーカー及びターゲットアイソセンタの模擬モデルを作る。この模擬モデルは、図11に仮想線で示すように、フィードバック部分80に表示される。この模擬モデルはまた、模擬ターゲットアイソセンタ40がマシンアイソセンタと一致するように、マシンアイソセンタ22を重ねて表示される。模擬ターゲット及び模擬マーカーはまた、特定の放射線療法を、ターゲットに適用するために、実際のターゲットをどのように三次元的に位置決めし、且つ配向しなければならないかを表示する。
【0045】
監視組立体44も、コンピュータ制御装置38から情報を受けて、これを表示して、マシンアイソセンタ22に対して、模擬ターゲット及び模擬マーカーに対するマーカー30及びターゲットアイソセンタ40の実際の位置を示す。したがって、患者16が支持台76(図1参照)上にいる間に、フィードバック部分80によって、オペレータが、模擬マーカーに対するマーカーの実際の位置、及びマシンアイソセンタ22に対するターゲットアイソセンタ40の実際の位置を、実質的にリアルタイムで決定することを可能にする。患者16及び支持台76を、ターゲット112が選択された放射線療法のために正しく配向されるまで、再位置決めすることができる。
【0046】
マシンアイソセンタ22に対するターゲット12の位置を正確に追跡し、監視するのに送出して、システム10を、時間中、患者の体14の中の腫瘍等のようなターゲットの状態を監視するのに使用することもできる。図13及び図14は、体92の中の腫瘍90を示す概略図である。腫瘍90内又はそれに近接して永久的に埋め込まれた三つのマーカー30をこの実施形態のために示す。腫瘍90及びマーカー30の画像が、時間の初めから終わりまで、CT、MRI、超音波、又は他の撮像技術によって得られる。これらの腫瘍90及びマーカー30の多重画像から、腫瘍に対するマーカーの位置を比較し、追跡することができる。したがって、医師は、多重画像中のマーカー30を、腫瘍が患者の体内で縮み、生長し、移動し、或るはそうではなく変化したのかどうかを決定する基準ツールとして使用することができる。
【0047】
一例として、図13は、三つのマーカー30の埋め込んだ、第一条件の腫瘍90の画像を示し、図14は、もっと後の時間に得られた腫瘍の第二の画像を示す。第二の画像は、患者の体内の同じ位置に同じマーカーを示し、マーカーに対する腫瘍の位置から、人は、腫瘍が縮んだことが分かる。かくして、医師は、例えば、放射線療法の効果、追加の治療が必要か否か、或いは、腫瘍の生長の変化が起こったか否か、或いは、放射線治療計画を変更する必要があるか否かを決定する時間の初めから終わりまで、体内の腫瘍又は他のターゲットの状態を追跡することができる。
【0048】
上述の実施形態では、マーカー30は、ターゲット12内に、又はそのすく隣の皮下に埋め込まれているとして説明され図示されている。このマーカー30の埋め込みは、ターゲット12が移動すれば、マーカーがユニットとしてターゲットと一緒に移動するようにすることが必要とされる場合に行われる。図15及び図16に示す別の実施形態では、マーカーは、体内又は体上で、ターゲット12に実質的に隣接し、且つこれと整列して、患者の体14の外表面112に接着された表面取付マーカー110である。表面取付マーカー110を、ターゲット12に対して、体の外表面112上の実質的に固定した位置に、テープ等のような粘着剤で、取り外し自在に接着することができる。これらの表面取付マーカー110は、外表面に対して体14内で実質的に移動することが知られていないターゲット12に特に適している。表面取付マーカー30はまた、体14の中のターゲットの大きさ又は位置が、ターゲットアイソセンタの幾らかの運動が、効果的な放射線療法又は治療に重要でないような場合の使用に適している。したがって、表面取付マーカー110は、ターゲット12及びマシンアイソセンタ22の正確な整合及び向きのための基準点をなす。変形例として、マーカー30を、治療アイソセンタに対して既知の位置で患者を固定する装置上に又はその中に取り付けてもよい。
【0049】
一つの実施形態での表面取付マーカー110は、ワイヤレスマーカーであり、その結果、ターゲット12に対するマーカー110の位置を乱すことなく、患者16が治療領域に行ったり来たりすることができるように、放射線線治療期間後、マーカーを患者の体14上に接着されたままにすることができる。変形例では、マーカー110は、患者16に接着されたままであり、治療領域の「有線」マーカーシステムのリード線に接続可能である。マーカーを患者の体上の適所に固定したまま、患者16を治療領域から去らせるために、配線をマーカー110から離すことができる。
【0050】
表面取付マーカー110はまた、放射線治療プログラム中、患者の基線胴回り(前後及び横寸法)を監視するのに使用できる。患者のセパレータと称される、基線胴回り測定値は、CT、MRI又は物理的な測定によって最初に得られる。患者のセパレータは、その患者のための放射線治療計画を準備するときに使用される。化学療法又は放射線療法中に起こるかもしれない患者のセパレータの変化についてのデータを提供するために、表面取付マーカー100を単独で、又は、埋め込んだマーカーと組み合わせて利用することができる。各表面取付マーカー110は、例えばターゲットアイソセンタ又は互いに、空間内の識別可能な最初の位置を有する。センサアレイ34及びコンピュータ制御装置38は、各表面取付マーカー及び/又はターゲットアイソセンタの間の距離を決定するように形成される。コンピュータ制御装置38は、患者のセパレータに対応して、距離を計算し、監視する。放射線療法の進行中、例えば、化学療法又は放射線療法による実質的な体重の減少のために、患者のセパレータが著しく変化すれば、より少ない患者の組織が放射線ビームを交替するのに利用でき、それにより、計画した放射線量より高い結果となるため、治療計画は妥当でなくなる。
【0051】
一つの実施形態では、表面取付マーカー110を、放射線治療操作前及び/又は操作中に、患者のセットアップ操作を容易にし、かつ早くするのに使用することができる。表面取付マーカー110を、既知の位置で、患者の体14上の選択された位置に位置決めする。マーカー110を励磁して、センサアレイに対する位置を決定する。次いで、マーカーの位置情報を、患者の外皮膚と線形加速器又はテーブル上面との間の距離である、ターゲット皮膚距離又は線源皮膚距離を計算するのに使用することができる。マーカー110をまた、テーブル上面から、マーカー又は患者の皮膚に投影されたレーザー従事線のような他の整合手段までの間の距離である、テーブル上面からアイソセンタまでを決定するのに使用することができる。したがって、患者が放射線治療計画に従って適正に位置決めされているかどうかを速やかに決定するために、セットアップ操作中、表面取付マーカー110を、関連した距離を自動的に計算するのに使用することができる。
【0052】
別の実施形態では、表面取付マーカー110を、ターゲット12の中に又はその近くに埋め込まれた一つ以上のマーカー30と共に使用することができる。各マーカー110又は30の相対的な位置を、上述のような患者のセットアップ、ターゲットの位置確認、ターゲットの位置決め、ターゲットの移動の追跡、及び/又はターゲットの持ち上げの任意の組み合わせのために計算し、使用することができる。
【0053】
システム10はまた、放射線療法を施す前に、患者の自動セットアップ操作に使用するようになっている。一つの実施形態の自動セットアップ操作を、図17のフローチャートとして、概略的に示す。患者のこのセットアップ操作において、患者の体の中の腫瘍又は他のターゲットを識別する(ブロック150参照)。例えば、X線、CT、MRI、核又は超音波撮像によって、ターゲットの画像を得る(ブロック152参照)。次いで、医師及び/又は技師は、特定の腫瘍について治療計画を決定する(ブロック154参照)。一つ以上のマーカーを、ターゲットに対して選択された位置で、体の中に又は体上に付け(ブロック156参照)、そして、マーカーに対する治療アイソセンタの位置を決定し、或いは計算する(ブロック158参照)。
【0054】
ターゲット及びマーカーをセンサアレイにほぼ隣接するように、患者を可動支持台上に位置決めする(ブロック160参照)。励磁源を作動して、マーカーを賦勢し(ブロック162参照)、センサが、マーカーからの信号の強度を測定する(ブロック164参照)。コンピュータ制御装置は、センサアレイ及びマシンアイソセンタに対するマーカー及びターゲットアイソセンタの位置を計算する(ブロック166参照)。コンピュータは、ターゲットアイソセンタとマシンアイソセンタの位置を比較し(ブロック168参照)、そして、二つのアイソセンタが不整合ならば、コンピュータは、支持台の制御システムを自動的に作動して、ターゲットアイソセンタがマシンアイソセンタと一致するまで、テーブル上面をマシンアイソセンタに対して移動させる(ブロック170参照)。
【0055】
一つの実施形態では、コンピュータ制御装置はまた、模擬マーカーの位置及び向きに対するマーカーの位置及び向きを決定する。マーカーが模擬マーカーと適切に整合も配向もされていなければ、支持テーブルは、適切なマーカーの整合に必要とされるように、直線的に及び角度的に調節される。このマーカーの整合は、6次元、即ち、X、Y、Z、(縦揺れ角、偏揺れ角、横揺れ角)に沿ったターゲット体積を正確に位置決めする。したがって、患者は、放射線療法をターゲットに正確に送出するために、マシンアイソセンタに対して正確な位置に自動的に位置決めされる。
【0056】
この自動セットアップ操作の一つの実施形態では、ターゲットアイソセンタがマシンアイソセンタと一致するまで、コンピュータは、放射線放出装置が放射線ビームを発するのを制止する。コンピュータは、放射線治療を施す間、ターゲットアイソセンタの位置を監視する(ブロック172参照)。ターゲットアイソセンタの位置が転位の許容度又は許容範囲を超えていれば、コンピュータは、放射線アイソセンタの放出を中断する(ブロック174参照)。次いで、コンピュータは、ターゲットがターゲットアイソセンタと共に好ましく位置決めされ、且つマシンアイソセンタと一致し(ブロック176参照)、放射線療法を、ターゲットの連続照射のために再び作動することができる(ブロック178参照)ように、テーブル上面及び患者を(ユニットとして)自動的に再位置決めすることができる。放射線療法の放出が未だ完了されていなければ(ブロック180参照)、操作は、参照ブロック172に戻って、放射線が送出されるときに、マシンアイソセンタに対するターゲットの位置を監視する。したがって、ターゲットの周囲に大きなマージンを必要とすることなく、放射線がターゲットに正確に送出されるように、調節が自動的に行われる。
【0057】
本発明の特定の実施形態及び例を、例示の目的でここに説明したけれども、当業者にとって容易に認識されるように、本発明の精神及び範囲を逸脱することなく、種々の同等の変形を行うことができる。本発明の側面の個々に提供された教示は、体内でターゲットを位置確認し、監視し、且つ追跡するのに適用することができ、上述のように、体内の腫瘍の例示の放射線治療に必ずしも限定されない。
【0058】
一般的に、特許請求の範囲では、使用された用語を、本発明を明細書及び特許請求の範囲に開示された特定の実施形態に限定するように解釈するべきではないが、体内の選択されたターゲットの位置を位置確認、監視し、及び/又は追跡するために、装置及び方法を提供するための特許請求の範囲に従って作動する全てのターゲット位置確認及び監視システムを含むように解釈すべきである。したがって、本発明は、特許請求の範囲によるのを除いて、限定されない。
【0059】
体内に埋め込まれ、励磁源によって励磁されて、前記複数のセンサーによって測定可能な特有のマーカー信号を生じることができる複数のマーカーを更に有する、請求項1記載のターゲット位置確認追跡システム。
【0060】
前記複数のマーカーは、少なくとも三つのマーカーを含む、請求項2記載のターゲット位置確認追跡システム。
【0061】
前記マーカーは、各々互いに軸線方向に並んでいない、請求項3記載のターゲット位置確認追跡システム。
【0062】
各マーカーからのマーカー信号は、他のマーカー信号の周波数と異なる特有の周波数を有する、請求項2記載のターゲット位置確認追跡システム。
【0063】
前記マーカーは、体内に埋め込めるワイヤレスマーカーである、請求項1記載のターゲット位置確認追跡システム。
【0064】
前記データ演算ユニットは、前記センサーに対するターゲットの位置を決定するように構成される、請求項6記載のターゲット位置確認追跡システム。
【0065】
前記マーカーは、体内に永久的に埋め込めるように構成される、請求項1記載のターゲット位置確認追跡システム。
【0066】
前記マーカーは、単軸共鳴マーカーである、請求項1記載のターゲット位置確認追跡システム。
【0067】
前記マーカーは、ワイヤレスマーカーである、請求項1記載のターゲット位置確認追跡システム。
【0068】
前記基準デバイスは、マシンアイソセンタに対して一定位置にあり、前記センサーのうちの少なくとも二つによって測定可能な基準信号を発する、請求項1記載のターゲット位置確認追跡システム。
【0069】
前記データ演算ユニットは、(a)前記マシンアイソセンタに対する前記センサーの位置、及び(b)前記センサーに対するマーカーの位置を決定して、前記マシンアイソセンタに対する前記ターゲットの位置を決定するように構成される、請求項1記載のターゲット位置確認追跡システム。
【0070】
前記マーカーから遠隔にあって、前記マーカーにエネルギーを与える磁界を発生させるように構成された励磁源を更に有する、請求項1記載のターゲット位置確認追跡システム。
【0071】
前記複数のセンサは、単一平面内のベースに固定されて、センサアレイを形成する、請求項1記載のターゲット位置確認追跡システム。
【0072】
体を支持するように成形され、且つ寸法決めされた患者支持構造体を更に有し、前記複数のセンサは、前記患者支持構造体に取り付けられる、請求項1記載のターゲット位置確認追跡システム。
【0073】
前記テーブル構造体は、ベースとテーブル上面とを有し、前記ベースは、前記センサーに対して一定位置にあり、前記テーブル上面は、前記センサーに対して移動可能に調節できる、請求項15記載のターゲット位置確認追跡システム。
【0074】
前記データ演算ユニットに接続された監視システムを更に有し、前記監視システムは、互いに対するターゲット及びマシンアイソセンタの位置についてのフィードバック情報を提供するように構成されたフィードバック部分を有する、請求項1記載のターゲット位置確認追跡システム。
【0075】
前記フィードバック部分は、表示装置である、請求項17記載のターゲット位置確認追跡システム。
【0076】
データ演算ユニット及び監視システムは、互いに対するターゲット及びマシンアイソセンタの移動を、リアルタイムで識別し且つ表示するように構成される、請求項17記載のターゲット位置確認追跡システム。
【0077】
前記マーカーは、互いに軸線方向に並んでいない複数のマーカーのうちの一つであり、データ演算ユニットは、前記複数のセンサー及びマシンアイソセンタに対するターゲットの三次元空間の位置及び向きを識別するように構成される、請求項1記載のターゲット位置確認追跡システム。
【0078】
前記基準デバイスは、放射線療法送出機械に取付可能な少なくとも一つの励磁可能なマーカーであり、一つの励磁可能なマーカーが、基準信号を生じさせる、請求項1記載のターゲット位置確認追跡システム。
【0079】
前記基準デバイスは、前記複数のセンサ及びデータ演算ユニットに物理的に接続されず、前記基準デバイスと前記センサーとの間に、ワイヤレス相互接続が設けられる、請求項1記載のターゲット位置確認追跡システム。
【0080】
放射線をマシンアイソセンタに対して治療体積に送出する放射線療法送出源と共に使用できるターゲット位置確認監視システムであって、
互いに対して、及びターゲットに対して既知の幾何学的形態で体上に、及び/又は体内に固定可能であり、外部励磁源によって励磁されて、前記マーカーによる識別可能なマーカー信号を生じさせる複数のワイヤレスマーカーと、
前記マーカーからのマーカー信号を測定するように位置決めされ、前記マーカーのうちの一つ以上のためにマーカー測定信号を出すように形成された複数のセンサーを有するセンサアレイと、
放射線送出源及びマシンアイソセンタに対して選択した位置に位置決め可能な基準デバイスと、
前記センサーに連結されて、前記センサーからマーカー測定信号を受け、マーカー測定信号を使用して、前記マシンアイソセンタに対するターゲットの位置を決定するように構成されたデータ演算ユニットと、を含む、ターゲット位置確認監視システム。
【0081】
各マーカーからの信号は測定可能であり、各センサは、マーカーのうちの少なくとも一つからの信号を測定し、コンピュータ制御装置は、測定された信号に基づいて、体内のターゲットの位置及び/又は空間的な向きを決定する、請求項23記載のターゲット位置確認監視装置。
【0082】
前記マーカーから遠隔にあって、前記マーカーを賦勢する励磁界を作動するように構成された励磁源を更に有する、請求項23記載のターゲット位置確認監視システム。
【0083】
前記センサアレイは、前記マーカーから遠隔の選択された位置にユニットとして位置決め可能であり、前記センサーは平面上に配列される、請求項23記載のターゲット位置確認監視システム。
【0084】
体を支持するように形成され且つ寸法決めされた患者支持構造体を更に有し、複数のセンサは、前記患者支持構造体の部分に対して一定位置にある、請求項23に記載のターゲット位置確認監視システム。
【0085】
前記コンピュータ制御装置に連結された監視システムを更に有し、前記監視システムは、互いに対する、ターゲット及びマシンアイソセンタの位置についてのフィードバック情報を提供するように構成されたフィードバック部分を有する、請求項23記載のターゲット位置確認監視システム。
【0086】
前記フィードバック部分は、表示装置である、請求項28記載のターゲット位置確認監視システム。
【0087】
前記コンピュータ制御装置及び監視システムは、互いに対するターゲット及びマシンアイソセンタの移動をリアルタイムで識別し、且つ、伝えるように構成される、請求項28記載のターゲット位置確認監視システム。
【0088】
体内のターゲットに照射する放射線療法送出システムであって、
放射線を、放射線療法送出源から、前記放射線療法送出源から間隔を隔てたマシンアイソセンタに送出する放射線送出組立体と、
ターゲットに対して或る位置で体の中に及び/又は体の上に固定可能で、外部励磁源によって励磁されて、測定可能なマーカー信号を生じさせることができるマーカーと、
互いから間隔を隔てられ、互いに既知の幾何学的形態に配列され、マーカー信号を測定し、マーカー信号に関する測定信号を発生させるように構成された複数のセンサと、
前記マシンアイソセンタに対して位置決めされ、前記マシンアイソセンタに対する前記センサーの位置を決定するように構成された基準デバイスと、
前記センサーに連結され、マーカー測定信号を受け、マーカー測定信号を使用して、前記ターゲットが前記マシンアイソセンタから所望の距離内にあるか否かを決定するように構成されるデータ演算ユニットと、を有する放射線送出システム。
【0089】
体内に埋め込み可能な複数のマーカーを更に有し、各マーカーは、外部励磁源源によって励磁されて、前記複数のセンサーによって測定可能なマーカー信号を生じさせることができる、請求項31記載の放射線送出システム。
【0090】
各マーカーからのマーカー信号は、他のマーカーとなる特有の信号である、請求項32記載の放射線送出システム。
【0091】
各マーカー信号は、他のマーカー信号の周波数と異なる周波数を有する、請求項32記載の放射線送出システム。
【0092】
マーカー信号は、或る信号強度を有し、前記データ演算ユニットは、マーカー信号に基づいてマーカー及びターゲットアイソセンタの空間的な位置を計算する、請求項31記載の放射線送出システム。
【0093】
基準デバイスは、前記放射線送出組立体に取り付けられ、センサーによって測定可能な基準信号を出す、請求項31記載の放射線送出システム。
【0094】
前記基準デバイスは、複数のセンサーによって測定可能な信号を出し、前記データ演算ユニットは基準デバイスに連結可能であり、前記データ演算ユニットは、基準信号の測定値に基づいて、複数のセンサーに対するマシンアイソセンタの位置を識別するように構成される、請求項31記載の放射線送出システム。
【0095】
体の外に位置決めでき、マーカーを励磁してマーカー信号を生じさせるように構成された励磁源を更に有する、請求項31記載の放射線送出システム。
【0096】
前記複数のセンサは、マーカーに対してユニットとして位置決め可能なセンサアレイを構成する、請求項31記載の放射線送出システム。
【0097】
マーカーが埋め込まれる体を支持するように形成され、且つ寸法決めされた患者支持構造体を更に有し、前記センサは、前記患者支持構造体の一部分に対して一定位置に取り付けられる、請求項31記載の放射線送出システム。
【0098】
前記患者支持構造は、ベースと、ターゲットをマシンアイソセンタと一致して位置決めするために前記センタに対して移動可能に調節可能なテーブル上面と、を有する、請求項31記載の放射線送出システム。
【0099】
前記データ演算ユニットに連結され、且つ、互いに対するマシンアイソセンタとターゲットの位置についてのフィードバック情報を提供するように構成されたフィードバック部分を有する監視システムを更に有する、請求項31記載の放射線送出システム。
【0100】
前記マーカーは複数のマーカーのうちの一つであり、前記マーカーは、各々互いに軸線方向に並んでおらず、前記コンピュータ制御装置は、前記複数のセンサーに対するターゲットの三次元空間の位置及び向きを計算するように構成されている、請求項31記載の放射線送出システム。
【0101】
前記基準デバイスは、前記放射線療法送出源に取り付けられたワイヤレスの励磁可能なマーカーである、請求項31記載の放射線送出システム。
【0102】
前記放射線療法送出組立体は、強度調節放射線療法(intensity modulated radiation therapy、IMRT)システム、三次元等角外部ビーム放射線システム(three-dimensional conformal external beam radiation system)、定位放射線外科システム(stereotactic radiosurgery system)、断層治療(tomo therapy)及び小源照射療法(brachytherapy)システムの一つである、請求項31記載の放射線送出システム。
【0103】
前記データ演算ユニットは、前記マーカーの位置、及び前記ターゲットの位置及び向きを識別する視覚的な診断用データを含み、前記データ演算ユニットは、前記ターゲットに放射線療法を適用する前に、視覚的な診断用データと、前記複数のセンサーに対する体内の前記ターゲットの位置及び空間的な向きとを比較し、且つ、前記ターゲット内のターゲットアイソセンタを識別するように構成されている、請求項31記載の放射線送出システム。
【0104】
電離放射線を体内の選択されたターゲットに送出する放射線療法システムであって、
電離放射線を前記ガントリーから離れた遠隔位置の治療アイソセンタに送出する移動可能なガントリーと、
体内でターゲットに対する或る位置に固定でき、共鳴器と、その共鳴器を入れるカプセルとを有し、前記共鳴器は、外部の磁界によって励磁されて、体内に或る間測定可能なマーカー信号を生じさせることができるワイヤレスマーカーと、
既知の幾何学的形態に配列され、マーカー信号を測定し、且つ測定信号を出すように構成された複数のセンサーと、
前記センサーに連結され、測定信号を受け、測定信号を使用して、前記治療アイソセンタに対して前記ターゲットの位置を決定させる指示を有するコンピュータ制御装置と、を含む、放射線療法システム。
【0105】
マーカーが埋め込まれた体を支持するように構成され且つ寸法決めされた患者支持構造体を更に有し、前記センサは、前記患者支持構造の部分に対して共通の平面に取り付けられる、請求項47記載の放射線療法システム。
【0106】
コンピュータ制御装置に連結された監視システムを更に有し、前記監視システムは、互いに対する、治療アイソセンタ及びターゲットの位置についてのフィードバック情報を提供するように構成されたフィードバック部分を有する、請求項47記載の放射線療法システム。
【0107】
前記コンピュータ制御装置及び監視システムは、互いに対するターゲット及びマシンアイソセンタの移動をリアルタイムで識別し、且つ表示するように構成される、請求項49記載の放射線療法システム。
【0108】
前記コンピュータ制御装置は、前記マーカーの位置、及び、ターゲットの位置及び向きを識別する画像データを含み、前記コンピュータ制御装置は、画像データと、前記複数のセンサーに対する体内のターゲットの位置及び空間的な向きとを比較し、ターゲット内のターゲットアイソセンタを識別するように構成される、請求項49記載の放射線療法システム。
【0109】
選択された線量の放射線を体内の選択されたターゲットに送出する放射線送出源と共に使用可能な放射線ターゲット整合システムであって、
前記ターゲットに対する選択された位置に、体内に及び/又は体の上に付けることができ、励磁源によって励磁されて、体内に測定可能な信号を生じさせることができるマーカーと、
ターゲット及び体内に位置決めされたマーカーの画像データを得て、且つ、その画像データを使用して、体内での空間的な関係及び向きを有する模擬ターゲットモデルを構成するように構成された画像システムと、
互いに対して既知の幾何学的形態で間隔を隔てられ、且つ、体内の前記マーカーからの信号を識別するように位置決めされ、前記マーカーからのマーカー信号を測定し、マーカー測定信号を出すように構成された複数のセンサと、
前記センサーに連結されて、前記センサーからの測定信号を受け、測定信号及び画像データを使用して、(a)前記複数のセンサーに対する体内の前記ターゲットの実際の位置のターゲットモデルを決定し、(b)前記ターゲット内のターゲットアイソセンタを識別し、(c)ターゲットモデルと、ターゲットの放射線治療の準備に当たって模擬ターゲットモデルとを比較し、且つ整合させる指示を含むデータ演算ユニットと、を有する、放射線ターゲット整合システム。
【0110】
前記マーカーは、体に取付け可能な複数のマーカーのうちの一つであり、マーカーは、互いに特有の信号を発生させる、請求項52記載の放射線ターゲット整合システム。
【0111】
前記マーカーは、複数のマーカーのうちの一つであり、前記マーカーは、各々互いに軸線方向に並んでおらず、前記データ演算ユニットは、前記複数のセンサーに対するターゲットの三次元空間の位置並びに向きを識別するように構成される、請求項52記載の放射線ターゲット整合システム。
【0112】
放射線を体内の選択されたターゲットに送出する放射線送出システムと共に使用し、放射線は、放射線送出源から間隔を隔てたマシンアイソセンタに送出される、調節可能な患者支持組立体であって、
ベースと、
前記ベースに取り付けられた支持構造体と、
前記支持構造体及び/又は前記ベースによって支持され、互いに既知の幾何学的形態に配列され、体内のターゲットに対して選択された位置で体内に埋め込み可能な励磁可能なマーカーからの信号を測定し、信号測定データを出すように構成された複数のセンサーを有するセンサアレイと、、
さらに、前記センサーに連結されて、信号測定データを受け、信号測定データを使用して、前記ターゲットの位置を決定するように構成されたデータ演算ユニットと、
前記支持構造に連結されて、前記支持構造体を選択的に移動させ、前記データ演算ユニットに連結されて、前記ターゲットを前記マシンアイソセンタと一致して位置決めするように、前記データ演算ユニットからの情報に応答して移動可能である移動制御デバイスと、を有する、調節可能な患者支持組立体。
【0113】
放射線送出源からターゲットに放射線を当てるために、体内の選択されたターゲットを識別し、追跡する方法であって、
マーカー信号を生じさせるように、外部励磁源によって励磁可能であるマーカーを、ターゲットに対して体内に埋め込むステップと、
前記埋め込んだマーカーを前記外部励磁源で励磁して、マーカー信号を生じさせるステップと、
前記センサは、互いに対して既知の幾何学的形態に位置決めされ、マーカー信号に応答して測定信号を発生させる体外のセンサーでマーカー信号を測定するステップと、
前記センサーからの測定信号を使用して、前記ターゲットに対するマシンアイソセンタの位置を決定するステップと、
前記ターゲットが前記マシンアイソセンタと一致した状態で、前記放射線送出装置に対して体を位置決めするステップと、
放射線を、前記放射線送出装置から、前記マシンアイソセンタ及び前記ターゲットに当てるステップと、を有する方法。
【0114】
さらに、複数のマーカーを、前記ターゲットに対して選択した位置及び向きで体内に埋め込むステップを有し、各マーカーは、前記外部励磁源によって励磁されて、それぞれのマーカーに特有の識別可能なマーカー信号を生じさせることができ、
さらに、前記埋め込んだマーカーを前記外部励磁源で励磁させて、識別可能な特有のマーカー信号を生じさせるステップと、
前記埋め込んだマーカーの各々からのマーカー信号を、体の外部の前記センサーで測定するステップと、
体内の前記ターゲット内の前記ターゲットアイソセンタの位置を、前記マーカー信号の前記センサーによる測定値に基づいて決定するステップと、を有する、請求項56記載の方法。
【0115】
前記センサーに対する体内のターゲットの位置及び向きを決定するステップを更に有する、請求項56記載の方法。
【0116】
前記マーカーは、或る信号強度を有するマーカー信号を発生させ、マーカー信号を測定するステップは、マーカー強度を各センサーで測定するステップを含む、請求項56記載の方法。
【0117】
コンピュータ制御装置に連結された監視システムを提供するステップと、
互いに対するマシンアイソセンタ及びターゲットアイソセンタの位置についての、前記コンピュータ制御装置からのフィードバックを、前記監視システムに与えるステップと、を更に有する、請求項56記載の方法。
【0118】
前記監視システムは、表示装置部分を含み、フィードバックを提供することは、前記表示装置部分に、互いに対するターゲット及びマシンアイソセンタの位置の視覚的な表示を提供することを含む、請求項60記載の方法。
【0119】
少なくとも三つのマーカーを、前記ターゲットに対して選択された位置で体内に埋め込むステップを更に有し、前記少なくとも三つのマーカーの各々は、互いに軸線方向に並んでいない、請求項56記載の方法。
【0120】
前記放射線送出源にほぼ隣接して選択された位置に、体を位置決めするステップを更に有し、その場合、
マーカー信号を測定し、前記ターゲットアイソセンタの位置を決定し、マシンアイソセンタの位置を決定し、かつ、前記ターゲットアイソセンタが前記マシンアイソセンタと一致するように、体を前記放射線送出装置に対して位置決めしすることが、体が前記放射線送出装置にほぼ隣接して選択された位置に位置決めされる前に、リアルタイムで行われる、請求項56記載の方法。
【0121】
前記ターゲットの照射中、前記マシンアイソセンタに対するターゲットアイソセンタの位置をリアルタイムで監視するステップと、前記ターゲットアイソセンタが前記マシンアイソセンタとの整合から外れて移動すれば、前記ターゲットの照射を中断するステップと、を更に有する、請求項56記載の方法。
【0122】
放射線療法を体内の選択されたターゲットに施す方法であって、
リード線なしのマーカーを、前記ターゲットに対して選択された位置で体内に埋め込むステップと、
前記埋め込んだマーカーを、体外の励磁源で励磁して、識別可能なマーカー信号を生じさせるステップと、
前記埋め込んだマーカーからのマーカー信号を、体の外部に、互いに既知の幾何学的形態で位置決めされたセンサーで測定するステップと、
マーカー信号の測定値に基づいて、放射線送出組立体のマシンアイソセンタに対するターゲットの位置を決定するステップと、
前記ターゲットが前記マシンアイソセンタと一致するように、前記放射線送出装置に対して体を位置決めするステップと、
放射線を、前記放射線送出装置から前記ターゲット及び前記マシンアイソセンタに当てるステップと、
放射線をターゲットに当てている間、前記マシンアイソセンタに対する前記ターゲットの実際の位置をリアルタイムで監視するステップと、を有する方法。
【0123】
電離放射線を選択したターゲットに送出するための治療上の作業を確立するための放射線治療計画方法であって、
体内の選択したターゲットの画像データを得るステップと、
励磁可能なマーカーを、ターゲットに対して選択された位置で体内に埋め込むステップと、
前記埋め込んだマーカーを外部励磁源で励磁して、体内に前記マーカーによる識別可能なマーカー信号を生じさせるステップと、
前記埋め込んだマーカーからのマーカー信号を、互いに既知の幾何学的形態に位置決めされた複数のセンサーで測定するステップと、
前記画像データから、体内のターゲットの前記ターゲットの形状及び空間的な向きを決定するステップと、
マーカー信号の前記センサーによる測定値に基づいて、体内の前記ターゲット内のターゲットアイソセンタを決定するステップと、
前記ターゲットの形状及び空間的な向きに基づいて、前記ターゲットに照射するための放射線線量及び送出の計画案を開発するステップと、を有する、方法。
【0124】
体を、体内のターゲット及び埋め込まれたマーカーで、放射線送出組立体に対して選択された位置に位置決めするステップを更に有し、前記放射線送出組立体は、集束した放射線を、前記放射線送出組立体から間隔を隔てられたターゲットアイソセンタに選択的に送出するように形成され、
さらに、前記複数のセンサーに対するマシンアイソセンタの位置を決定するステップと、
前記ターゲットが前記マシンアイソセンタ実質的に一致して、前記放射線送出装置に対して体を位置決めするステップと、
放射線を、前記放射線送出組立体から前記マシンアイソセンタに、及び前記ターゲットに送出するステップと、を有する、請求項66記載の方法。
【0125】
前記画像データに基づいて体に対して選択された位置及び向きで、三次元模擬ターゲットモデルを決定するステップと、
マーカー信号の測定値に基づいて、三次元の実際のターゲットを定めるステップと、
模擬ターゲットモデル及び実際のターゲットモデルの位置及び向きについてのフィードバック情報を出すフィードバックデバイスを提供するステップと、
放射線をターゲットに送出する前に、ターゲットと実際のモデルの向きを整合させるように体を移動させるステップと、を更に有する、請求項66記載の方法。
【0126】
放射線を体内のターゲットに送出するために、放射線送出装置に対して体を位置決めする方法であって、
体を移動可能な支持組立体上に位置決めするステップと、
励磁可能なマーカーを、体の外部励磁源で励磁するステップとを有し、前記マーカーは、前記ターゲットに対して選択した位置で体内に埋め込まれ、励磁した前記マーカーは、識別可能なマーカー信号を出し、
さらに、前記埋め込んだマーカーからのマーカー信号を、互いに対して、且つ前記支持組立体に対して既知の幾何学的形態に位置決めされた、体の外部の複数のセンサーで測定するステップと、
さらに、マーカー信号のセンサからの信号に基づいて、体内の前記ターゲット内にターゲットアイソセンタを決定するステップと、
前記放射線送出組立体の位置に基づいて、複数のセンサーに対するマシンアイソセンタの位置を決定するステップと、
前記ターゲットアイソセンタの位置と前記マシンアイソセンタの位置とを比較するステップと、
前記マシンアイソセンタに対して体を移動させて、前記ターゲットアイソセンタを前記マシンアイソセンタと一致して位置決めするステップと、を有する方法。
【0127】
前記複数のセンサは共通の平面に在り、前記マーカーは、共鳴励磁界に応答して共鳴磁気信号を生じさせるリード線なしのマーカーからなる、請求項69記載の方法。
【0128】
放射線ビームをビームアイソセンタに向ける放射源を有する放射線送出システムを使用する放射線療法における、患者内の治療ターゲットを位置確認し、追跡するための装置であって、
前記治療ターゲットに対して或る部位で患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動的に連結されたコンピュータと、を有し、前記コンピュータは、(a)放射線ビームで患者の少なくとも或る部分に照射し、(b)患者に照射しながら、前記センサーを使用して、前記マーカーの特性を検知し、(c)前記マーカーの検知された特性に基づいて、前記治療ターゲットの実際の位置を決定し、(d)患者が前記センサーに最も近い間、前記治療ターゲットの実際の位置を前記ビームアイソセンタとほぼ相関させるフィードバック情報を提供する方法をコンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、装置。
【0129】
放射線ビームをビームアイソセンタに向ける放射源を有する放射線送出システムを使用する放射線療法における、患者を追跡するための装置であって、
患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動的に連結されたコンピュータと、を有し、前記コンピュータは、(a)前記マーカーの特性を検知して、前記マーカーの位置に関する位置情報を得て、(b)位置情報に基づいて、前記マーカーの実際の位置を決定し、患者が、前記ターゲットの位置情報を得るセンサーに最も近い間に、前記マーカーの実際の位置のフィードバックを提供する方法をコンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、装置。
【0130】
放射線ビームをビームアイソセンタに差し向ける放射源を有する放射線送出システムを使用する放射線療法における、患者内を追跡するための装置であって、
患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動的に連結されたコンピュータと、を有し、前記コンピュータは、(a)前記マーカーの特性を検知して、前記マーカーの位置に関する位置情報を得て、(b)位置情報に基づいて、前記マーカーの実際の位置を決定し、前記マーカーを検知している間に、前記マーカーの移動を追跡する仕方で、前記マーカーの実際の位置のフィードバックを提供する方法をコンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、装置。
【0131】
放射線ビームを生じさせる放射源、患者支持体、及び前記患者支持体を移動させる駆動システムを有する放射線送出システムに関連して使用するための制御システムであって、 治療ターゲットに対して或る部位で患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動可能に連結されたコンピュータと、を有し、前記コンピュータは、(a)前記マーカーを検知して、前記マーカーの実際の位置に関する位置情報を得て、(b)前記マーカーの位置情報に基づいて、前記治療ターゲットの実際の位置を決定し、(c)前記治療ターゲットの実際の位置に基づいて、三次元での前記治療ターゲットと前記放射線ビームのビームアイソセンタとの間のずれを計算し、(d)前記治療ターゲットと前記ビームアイソセンタとの間のずれが、許容範囲を超えている場合に、患者支持台を自動制御によって移動させる方法を前記コンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、制御システム。
【0132】
放射線ビームを生じさせる放射源、患者支持体、及び前記患者支持体を移動させる駆動システムを有する放射線送出システムに関連して使用するための制御システムであって、 治療ターゲットに対して或る部位で患者に埋め込まれるように構成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動可能に連結されたコンピュータと、を有し、前記コンピュータは、前記ワイヤレスのマーカーを前記センサーによって検知することができるように、患者が前記患者支持体上に置かれている間に、前記コンピュータに、方法を実行させる指示を含むコンピュータ作動可能媒体を有し、前記方法は、(a)前記ワイヤレスマーカーの位置及び/又は向きについての位置情報を前記センサーから得て、(b)前記センサーから得られた前記位置情報に基づいて、前記治療ターゲットの実際の位置を決定し、(c)前記治療ターゲットと前記放射線ビームのビームアイソセンタとの間のずれ量を計算し、(d)前記治療ターゲットと前記ビームアイソセンタとの間の計算されたずれ量に基づいて、コンピュータにより、前記患者支持体を自動的に移動させ、且つ/又、前記放射線ビームを制御するのを含む、制御システム。
【0133】
放射線ビームを生じさせる放射源、患者支持体及び前記患者支持体を移動させる駆動システムを有する放射線送出システムに関連して使用するための制御システムであって、
治療ターゲットに対して或る部位で患者に埋め込まれるように形成されたワイヤレスのマーカーと、
前記マーカーの位置及び/又は向きについての位置情報を得るセンサーと、
前記センサーに作動可能に連結されたコンピュータと、を有し、前記コンピュータは、(a)前記マーカーを検知して、前記マーカーの実際の位置に関する位置情報を得て、(b)前記マーカーの検知された位置情報に基づいて、前記マーカーの実際の位置を決定し、(c)前記マーカーを検知しながら、前記マーカーの実際の位置に基づいて、コンピュータによって患者及び/又は患者の移動を自動的に処理するために、放射線ビームを制御する方法を前記コンピュータに実行させる指示を含むコンピュータ作動可能媒体を有する、制御システム。
【0134】
放射線ビームをビームアイソセンタに差し向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように形成された台及びその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータ作動可能な指示を有するコンピュータを有し、前記指示は、(a)前記マーカーの位置情報を検出し、(b)前記位置情報を使用して、基準フレームに対する前記マーカーの位置を決定し、(c)前記マーカーの位置と前記マーカーに対する所望のマーカーの位置との間のずれ量を計算し、その場合、前記マーカーが所望のマーカー位置に在るときに、前記ターゲットは前記基準フレーム内の所望の原位置に位置決めされる方法を前記コンピュータに実行させる、装置。
【0135】
放射線ビームをビームアイソセンタに差し向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台及びその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータ作動可能な指示を有するコンピュータと、を有し、前記指示は、(a)前記マーカーの位置情報を検出し、(b)前記マーカーの位置情報を使用して、基準フレームに対するターゲットの位置を決定し、(c)前記基準フレーム内の、前記ターゲットの位置と前記ターゲットの所望の位置との間のずれ量を計算する方法を前記コンピュータに実行させる、装置。
【0136】
放射線ビームをビームアイソセンタに差し向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台とその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータ作動可能な指示を有するコンピュータと、を有し、前記指示は、(a)前記マーカーを検知して、前記マーカーの位置に関する位置情報を得て、(b)位置情報に基づいて、前記マーカーの実際の位置を決定し、(c)前記ターゲットと前記ビームアイソセンタとの間のずれ量が許容範囲を超えているならば、前記マーカー実際の位置に従って患者を移動させ、(d)前記検知及び決定作業を繰り返すことによって、前記ビームアイソセンタに対して前記ターゲットを追跡する方法を前記コンピュータに実行させる、装置。
【0137】
放射線ビームをビームアイソセンタに向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台とその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータ作動可能な指示を有するコンピュータと、を有し、前記指示は、(a)前記マーカーを検知して、前記マーカーの位置に関する位置情報を得て、(b)位置情報に基づいて、前記マーカーの実際の位置を決定し、(c)前記マーカーの実際の位置に従って患者を移動させて、前記ターゲットと前記ビームアイソセンタとの間のずれ量を減じ、(d)患者を移動させながら、前記検知及び決定作業を繰り返すことによって、患者の移動中、前記ビームアイソセンタに対して前記ターゲットを追跡する方法を前記コンピュータに実行させる、装置。
【0138】
放射線ビームをビームアイソセンタに差し向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台とその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータと、を有し、該コンピュータは、(a)基準フレームに対して前記ターゲットの所望の原位置のターゲット座標を含むメモリーと、(b)(i)三次元マーカー座標を決定し、(ii)前記三次元マーカー座標に基づいて前記ターゲットの実際の位置を計算し、(iii)前記ターゲットの実際の位置とターゲット座標との間の三次元のずれ量を計算する方法を前記コンピュータに実行させるコンピュータ作動可能な指示を含む、装置。
【0139】
放射線ビームをビームアイソセンタに向ける放射線デバイスにおける放射線療法のために患者を調整するための装置であって、
ターゲットに対して患者に埋め込まれるように構成されたワイヤレスマーカーと、
前記マーカーを前記センサーによって検知することができ、且つ前記放射線ビームが患者を照射することができるように、患者を位置決めするように構成された台とその台を移動させる駆動システムとを有する移動可能な患者支持体と、
コンピュータと、を有し、該コンピュータは、(a)前記ビームアイソセンタに対する前記ターゲットの所望の原位置を含むメモリー、及び、(b)(i)前記センサーから得られた前記マーカーの位置情報に基づいて、三次元マーカー座標を決定し、(ii)三次元マーカー座標と前記マーカーに対する所望のマーカー位置との間のずれ量を計算し、その場合に前記マーカーが前記所望のマーカー位置に位置決めされているときに、前記ターゲットを前記所望の原位置に位置決めする方法をコンピュータに実行させるコンピュータ作動可能な指示を含む、装置。
【特許請求の範囲】
【請求項1】
放射線をマシンアイソセンタに対して所定の体積に送出する放射線療法送出機械と共に使用するためのターゲット位置確認追跡システムであって、
患者の体内のターゲットに対して或る位置に固定でき、外部励磁源によって励磁されて、識別可能なマーカー信号を生じさせるマーカーと、
互いに対して既知の幾何学的形態に配列され、且つ、マーカー信号を識別するように位置決めされ、マーカー信号を測定し、且つ、マーカー信号に関係したマーカー測定信号を出すように構成された複数のセンサと、
マシンアイソセンタに対して選択した位置にあって、マシンアイソセンタに対して前記センサの位置を決定するように形成された基準デバイスと、
前記センサーに接続されて、マーカー測定信号を受け、マーカー測定信号を使用して、マシンアイソセンタに対してターゲットの位置を決定するように構成されたるデータ演算ユニットと、を有する、ターゲット位置確認追跡システム。
【請求項1】
放射線をマシンアイソセンタに対して所定の体積に送出する放射線療法送出機械と共に使用するためのターゲット位置確認追跡システムであって、
患者の体内のターゲットに対して或る位置に固定でき、外部励磁源によって励磁されて、識別可能なマーカー信号を生じさせるマーカーと、
互いに対して既知の幾何学的形態に配列され、且つ、マーカー信号を識別するように位置決めされ、マーカー信号を測定し、且つ、マーカー信号に関係したマーカー測定信号を出すように構成された複数のセンサと、
マシンアイソセンタに対して選択した位置にあって、マシンアイソセンタに対して前記センサの位置を決定するように形成された基準デバイスと、
前記センサーに接続されて、マーカー測定信号を受け、マーカー測定信号を使用して、マシンアイソセンタに対してターゲットの位置を決定するように構成されたるデータ演算ユニットと、を有する、ターゲット位置確認追跡システム。
【図1】


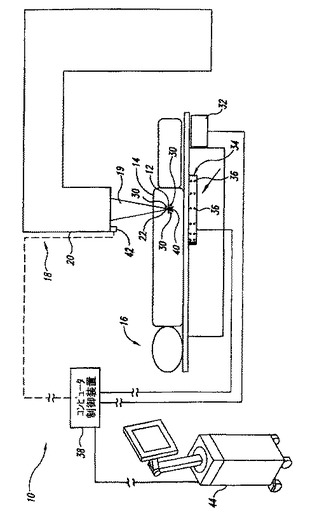
【図2】
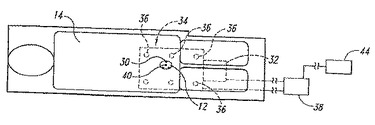
【図3】
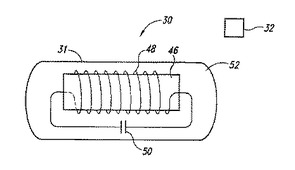
【図4】
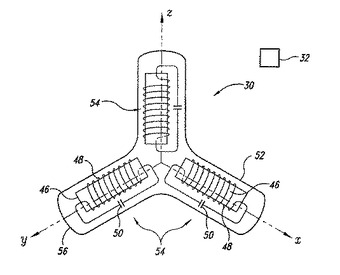
【図5】
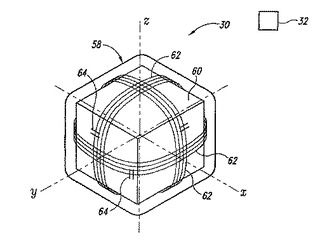
【図6】
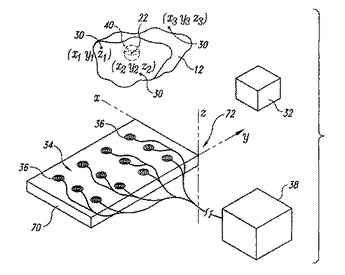
【図7】
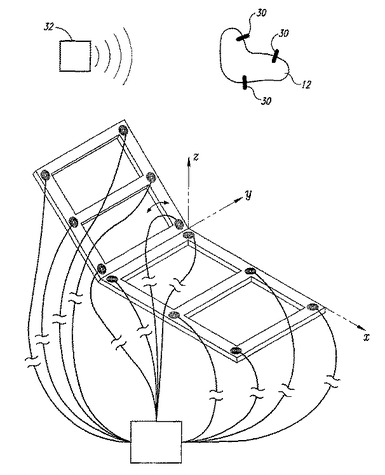
【図8】
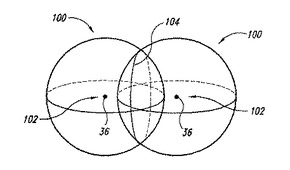
【図9】
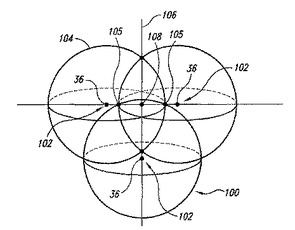
【図10】
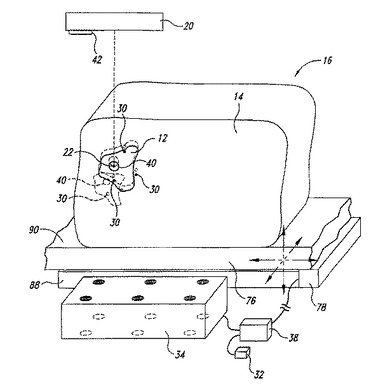
【図11】
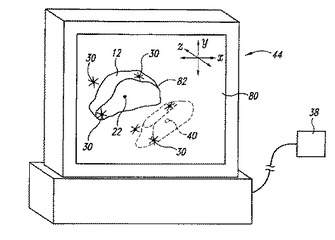
【図12】
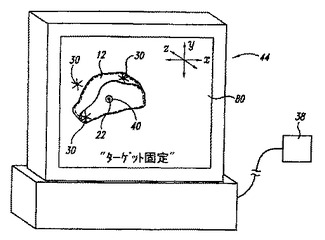
【図13】
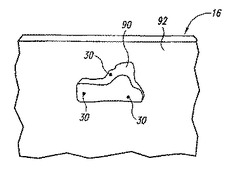
【図14】
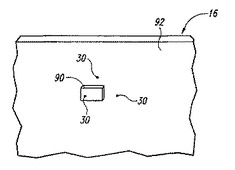
【図15】
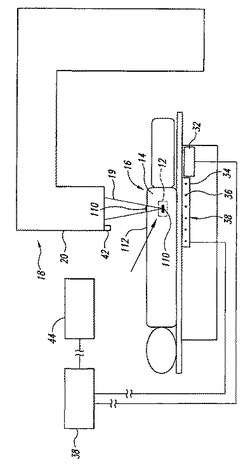
【図16】
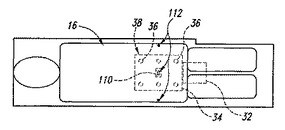
【図17】
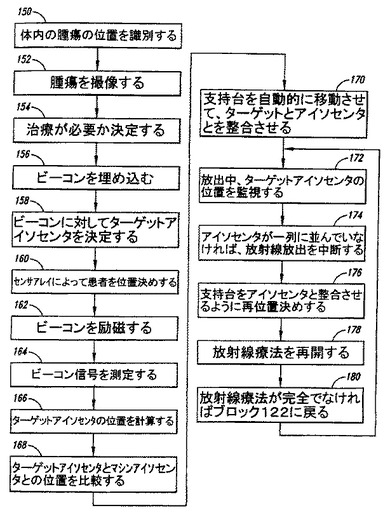
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2010−5427(P2010−5427A)
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願番号】特願2009−229945(P2009−229945)
【出願日】平成21年10月1日(2009.10.1)
【分割の表示】特願2003−503301(P2003−503301)の分割
【原出願日】平成14年6月5日(2002.6.5)
【出願人】(503450014)カリプソー メディカル テクノロジーズ インコーポレイテッド (1)
【Fターム(参考)】
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願日】平成21年10月1日(2009.10.1)
【分割の表示】特願2003−503301(P2003−503301)の分割
【原出願日】平成14年6月5日(2002.6.5)
【出願人】(503450014)カリプソー メディカル テクノロジーズ インコーポレイテッド (1)
【Fターム(参考)】
[ Back to top ]