
誘導装置
【課題】
HPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する従来の誘導装置においては、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしているため、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題がある。
【解決手段】
従来は受信部と局部発振部が1セットであったが、複数の受信部と局部発振部のセットを有することで、目標からの反射信号とクラッタを弁別することができ、ビーム領域の目標を探知することを可能にするものである。
HPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する従来の誘導装置においては、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしているため、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題がある。
【解決手段】
従来は受信部と局部発振部が1セットであったが、複数の受信部と局部発振部のセットを有することで、目標からの反射信号とクラッタを弁別することができ、ビーム領域の目標を探知することを可能にするものである。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、目標からの反射信号にFFT(Fast Fourier Transform)処理を行い、抽出された目標に向けて飛しょう体を誘導する誘導装置に関するものである。
【背景技術】
【0002】
従来の誘導装置は、目標に向けて電波を送信し、目標からの反射信号を受信して、この受信信号に目標検出処理を行ない、目標信号を検出し、角度情報、速度情報、距離情報を得て、飛しょう体を目標に向けて誘導している。このような誘導装置の一例として、誘導装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−215239号公報(第2図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の誘導装置のようなHPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する誘導装置において、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしている。しかし、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題があった。
【0005】
この発明はかかる問題を解決するためになされたものであり、誘導装置が目標信号を検出する際に目標からの反射信号とクラッタとを弁別することができ、ビーム領域の目標を探知することが可能な誘導装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明による誘導装置は、所定のパルス繰り返し周波数(PRF:Pulse Repetition Frequency)でパルス信号を送信し、目標で反射された反射信号にFFT処理を行うことで検出した目標に向けて飛しょう体を誘導する誘導装置であって、前記パルス信号を送信し、目標からの反射信号を受信するアンテナ部と、前記アンテナ部の方向を、目標方向あるいはクラッタの方向に制御するアンテナ角度制御部と、前記アンテナ角度制御部に対して前記アンテナ部の方向を指定し、方向を指定した前記アンテナ部が受信した前記反射信号にFFT処理を行うことで前記目標を検出する目標検出部とを備え、前記目標検出部は、前記アンテナ部をクラッタ方向に向けたときの前記反射信号と、前記アンテナ部を目標方向に向けたときの前記反射信号との差分をとることにより、前記目標を検出する。
【発明の効果】
【0007】
この発明の誘導装置によれば、メインローブクラッタと目標のドップラ周波数が重なるビーム領域内の目標に対しても探知が可能となる。クラッタレベルが低い場合で形状により目標を弁別できる場合は、メインローブクラッタと目標のドップラ周波数が重なるビーム領域にあっても目標からの反射信号を検出することが可能となる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1に係る誘導装置の構成を示す図である。
【図2】この発明の実施の形態1に係る誘導装置の目標方向およびクラッタ方向に対する放射及び反射の状況を説明する図である。
【図3】この発明の実施の形態1に係る誘導装置のクラッタ方向の決め方を説明する図である。
【図4】この発明の実施の形態1に係る誘導装置の目標弁別の方法を説明する図である。
【発明を実施するための形態】
【0009】
実施の形態1.
以下、図を用いてこの発明の係る実施の形態1について説明する。
図1はこの発明の実施の形態1に係る誘導装置の構成を示す図である。この発明の誘導装置は、所定のパルス繰り返し周波数(PRF:Pulse Repetition Frequency)でパルス信号を送信し、目標で反射された反射信号にFFT処理を行うことで目標を検出し、飛しょう体を目標に向けて誘導する。この反射信号にFFT(Fast Fourier Transform)処理を行うことで目標を検出し飛しょう体を目標に向けて誘導する方法については、例えば特許文献1に記載がある。
【0010】
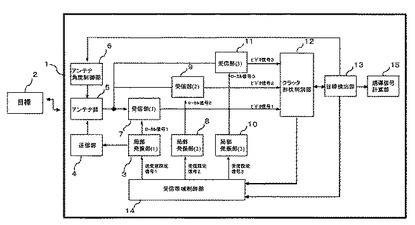
図1は、実施の形態1の誘導装置の構成図である。誘導装置1は、送受信周波数設定信号1により送信周波数信号及びローカル信号1を出力する局部発振部(1)3と、送信周波数信号を増幅した送信信号を出力する送信部4と、送信信号を空間へ送信し、目標2からの反射信号を受信するアンテナ部5と、目標方向とクラッタ方向にアンテナ部5を制御するためのアンテナ角度制御部6と、目標2からの反射信号を局部発振部(1)3から出力されるローカル信号1で周波数変換、増幅してビデオ信号1を出力する受信部(1)7と、受信周波数設定信号2により、ローカル信号2を出力する局部発振部(2)8と、目標2からの反射信号を局部発振部(2)8から出力されるローカル信号2で周波数変換、増幅してビデオ信号2を出力する受信部(2)9と、受信周波数設定信号3により、ローカル信号3を出力する局部発振部(3)10と、目標2からの反射信号を局部発振部(3)10から出力されるローカル信号3で周波数変換、増幅してビデオ信号3を出力する受信部(3)11と、受信部(1)7からのビデオ信号1、受信部(2)9からのビデオ信号2、受信部(3)11からのビデオ信号3をもとにクラッタ形状を判別するクラッタ形状判別部12と、クラッタ形状判別部12からのクラッタ形状判別結果をもとに目標検出を行う目標検出部13と、クラッタ形状判別部12からのクラッタ形状判別結果、および目標検出部13からの目標検出結果をもとに、局部発信部(1)3、局部発信部(2)8、局部発信部(3)10に対して受信設定信号を出力する受信帯域制御部14と、検出した目標信号から距離、速度、角度情報を計算し誘導装置を目標に向けて誘導するための誘導信号を出力する誘導信号計算部15と、から構成される。
【0011】
次に、図1〜図4を参照して動作を説明する。
図2で、(a)は目標方向に対する放射及び反射の状況を説明する図であり、(b)はクラッタ方向に対する放射及び反射の状況を説明する図である。図3は、クラッタ方向の決め方を説明する図である。また、図4は目標弁別の流れを説明する図である。
【0012】
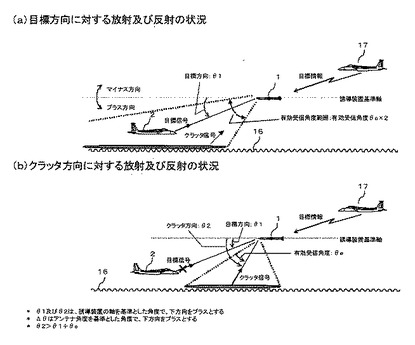
図2において、1は目標に向けて飛しょうする誘導装置、2は飛しょう体1が補足・追尾する目標、16は海面または地表面、17は母機を表わしている。
図2(a)に示すように、まず、誘導装置1は、母機17から目標情報を受信する。アンテナ角度制御部6はこの目標情報に基づき、アンテナ部5のアンテナ角度を目標方向(θ1)に設定し電波を放射する。アンテナ部5は、目標2で反射された反射波(ここでは、目標信号という)、及び海面または地表面14で反射された反射波(ここでは、クラッタ信号という)を受信する。
次に、図2(b)に示すように、アンテナ角度制御部6は、アンテナ部5のアンテナ角度をクラッタ方向、即ち、目標2が有効受信角度範囲外となる方向(θ2)に設定し電波を放射する。このようにして、アンテナ部5は、海面または地表面16で反射されたクラッタ信号のみを受信する。
【0013】
ここで図3を参照して、目標2が有効受信角度範囲外となるクラッタ方向(θ2)を定める決定方法を説明する。
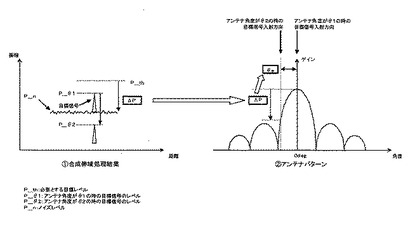
まず、目標の検知に必要となる目標信号のレベル(P_th)とノイズレベル(P_n)の差から受信電力低下量(ΔP=P_th−P_n)を算出する。
次に、既知であるアンテナパターンを用いて、アンテナのピークゲインからΔPだけゲインが低下する角度(θe)を求める。これにより、目標方向(θ1)からθeだけずらすと、目標信号に対する影響がない角度となる。この角度をクラッタ方向(θ2>θ1+θe)として定める。
【0014】
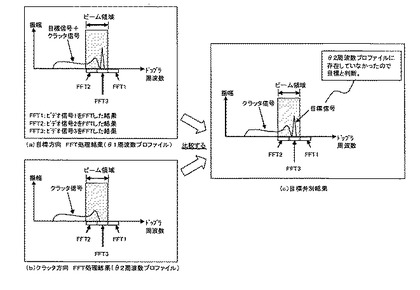
次に、図4を参照して、ビーム領域内にある目標信号を弁別する方法を説明する。
目標方向(θ1)を指向したタイミングのビデオ信号1〜3をそれぞれFFT処理し、周波数軸上で並べることで、図4(a)に示すような、θ1方向の周波数プロファイルであるθ1周波数プロファイルを作成する。ここでθ1周波数プロファイルには、目標信号とクラッタ信号が存在している。
次にクラッタ方向(θ2)を指向したタイミングのビデオ信号1〜3をそれぞれFFT処理し、周波数軸上で並べることで、図4(b)に示すような、θ2方向の周波数プロファイルであるθ2周波数プロファイルを作成する。ここでθ2周波数プロファイルにはクラッタ信号のみが存在している。
そして、θ1周波数プロファイルとθ2周波数プロファイルとの差分をとることで、目標信号を抽出できる。
【0015】
このようにして実施の形態1の誘導装置は、2つの周波数プロファイルを比較することで、目標からの反射信号とクラッタを弁別することができ、θ1周波数プロファイルから目標信号を弁別することが可能となる。
【0016】
なお、図1においては、受信部と局部発信部のセットを3セット有する誘導装置の例を記載したが、ビーム領域が受信帯域何個分に相当するかにより、2セットまたは4セット以上の場合でも、実施例1と同様に周波数プロファイルから目標信号を弁別することが可能である。
【符号の説明】
【0017】
1 誘導装置、2 目標、3 局部発振部(1)、4 送信部、5 アンテナ部、6 アンテナ角度制御部、7 受信部(1)、8 局部発振部(2)、9 受信部(2)、10 局部発振部(3)、11 受信部(3)、12 クラッタ形状判別部、13 目標検出部、14 受信帯域制御部、15 誘導信号計算部、16 海面または地表面、17 母機。
【技術分野】
【0001】
この発明は、目標からの反射信号にFFT(Fast Fourier Transform)処理を行い、抽出された目標に向けて飛しょう体を誘導する誘導装置に関するものである。
【背景技術】
【0002】
従来の誘導装置は、目標に向けて電波を送信し、目標からの反射信号を受信して、この受信信号に目標検出処理を行ない、目標信号を検出し、角度情報、速度情報、距離情報を得て、飛しょう体を目標に向けて誘導している。このような誘導装置の一例として、誘導装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−215239号公報(第2図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の誘導装置のようなHPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する誘導装置において、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしている。しかし、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題があった。
【0005】
この発明はかかる問題を解決するためになされたものであり、誘導装置が目標信号を検出する際に目標からの反射信号とクラッタとを弁別することができ、ビーム領域の目標を探知することが可能な誘導装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明による誘導装置は、所定のパルス繰り返し周波数(PRF:Pulse Repetition Frequency)でパルス信号を送信し、目標で反射された反射信号にFFT処理を行うことで検出した目標に向けて飛しょう体を誘導する誘導装置であって、前記パルス信号を送信し、目標からの反射信号を受信するアンテナ部と、前記アンテナ部の方向を、目標方向あるいはクラッタの方向に制御するアンテナ角度制御部と、前記アンテナ角度制御部に対して前記アンテナ部の方向を指定し、方向を指定した前記アンテナ部が受信した前記反射信号にFFT処理を行うことで前記目標を検出する目標検出部とを備え、前記目標検出部は、前記アンテナ部をクラッタ方向に向けたときの前記反射信号と、前記アンテナ部を目標方向に向けたときの前記反射信号との差分をとることにより、前記目標を検出する。
【発明の効果】
【0007】
この発明の誘導装置によれば、メインローブクラッタと目標のドップラ周波数が重なるビーム領域内の目標に対しても探知が可能となる。クラッタレベルが低い場合で形状により目標を弁別できる場合は、メインローブクラッタと目標のドップラ周波数が重なるビーム領域にあっても目標からの反射信号を検出することが可能となる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1に係る誘導装置の構成を示す図である。
【図2】この発明の実施の形態1に係る誘導装置の目標方向およびクラッタ方向に対する放射及び反射の状況を説明する図である。
【図3】この発明の実施の形態1に係る誘導装置のクラッタ方向の決め方を説明する図である。
【図4】この発明の実施の形態1に係る誘導装置の目標弁別の方法を説明する図である。
【発明を実施するための形態】
【0009】
実施の形態1.
以下、図を用いてこの発明の係る実施の形態1について説明する。
図1はこの発明の実施の形態1に係る誘導装置の構成を示す図である。この発明の誘導装置は、所定のパルス繰り返し周波数(PRF:Pulse Repetition Frequency)でパルス信号を送信し、目標で反射された反射信号にFFT処理を行うことで目標を検出し、飛しょう体を目標に向けて誘導する。この反射信号にFFT(Fast Fourier Transform)処理を行うことで目標を検出し飛しょう体を目標に向けて誘導する方法については、例えば特許文献1に記載がある。
【0010】
図1は、実施の形態1の誘導装置の構成図である。誘導装置1は、送受信周波数設定信号1により送信周波数信号及びローカル信号1を出力する局部発振部(1)3と、送信周波数信号を増幅した送信信号を出力する送信部4と、送信信号を空間へ送信し、目標2からの反射信号を受信するアンテナ部5と、目標方向とクラッタ方向にアンテナ部5を制御するためのアンテナ角度制御部6と、目標2からの反射信号を局部発振部(1)3から出力されるローカル信号1で周波数変換、増幅してビデオ信号1を出力する受信部(1)7と、受信周波数設定信号2により、ローカル信号2を出力する局部発振部(2)8と、目標2からの反射信号を局部発振部(2)8から出力されるローカル信号2で周波数変換、増幅してビデオ信号2を出力する受信部(2)9と、受信周波数設定信号3により、ローカル信号3を出力する局部発振部(3)10と、目標2からの反射信号を局部発振部(3)10から出力されるローカル信号3で周波数変換、増幅してビデオ信号3を出力する受信部(3)11と、受信部(1)7からのビデオ信号1、受信部(2)9からのビデオ信号2、受信部(3)11からのビデオ信号3をもとにクラッタ形状を判別するクラッタ形状判別部12と、クラッタ形状判別部12からのクラッタ形状判別結果をもとに目標検出を行う目標検出部13と、クラッタ形状判別部12からのクラッタ形状判別結果、および目標検出部13からの目標検出結果をもとに、局部発信部(1)3、局部発信部(2)8、局部発信部(3)10に対して受信設定信号を出力する受信帯域制御部14と、検出した目標信号から距離、速度、角度情報を計算し誘導装置を目標に向けて誘導するための誘導信号を出力する誘導信号計算部15と、から構成される。
【0011】
次に、図1〜図4を参照して動作を説明する。
図2で、(a)は目標方向に対する放射及び反射の状況を説明する図であり、(b)はクラッタ方向に対する放射及び反射の状況を説明する図である。図3は、クラッタ方向の決め方を説明する図である。また、図4は目標弁別の流れを説明する図である。
【0012】
図2において、1は目標に向けて飛しょうする誘導装置、2は飛しょう体1が補足・追尾する目標、16は海面または地表面、17は母機を表わしている。
図2(a)に示すように、まず、誘導装置1は、母機17から目標情報を受信する。アンテナ角度制御部6はこの目標情報に基づき、アンテナ部5のアンテナ角度を目標方向(θ1)に設定し電波を放射する。アンテナ部5は、目標2で反射された反射波(ここでは、目標信号という)、及び海面または地表面14で反射された反射波(ここでは、クラッタ信号という)を受信する。
次に、図2(b)に示すように、アンテナ角度制御部6は、アンテナ部5のアンテナ角度をクラッタ方向、即ち、目標2が有効受信角度範囲外となる方向(θ2)に設定し電波を放射する。このようにして、アンテナ部5は、海面または地表面16で反射されたクラッタ信号のみを受信する。
【0013】
ここで図3を参照して、目標2が有効受信角度範囲外となるクラッタ方向(θ2)を定める決定方法を説明する。
まず、目標の検知に必要となる目標信号のレベル(P_th)とノイズレベル(P_n)の差から受信電力低下量(ΔP=P_th−P_n)を算出する。
次に、既知であるアンテナパターンを用いて、アンテナのピークゲインからΔPだけゲインが低下する角度(θe)を求める。これにより、目標方向(θ1)からθeだけずらすと、目標信号に対する影響がない角度となる。この角度をクラッタ方向(θ2>θ1+θe)として定める。
【0014】
次に、図4を参照して、ビーム領域内にある目標信号を弁別する方法を説明する。
目標方向(θ1)を指向したタイミングのビデオ信号1〜3をそれぞれFFT処理し、周波数軸上で並べることで、図4(a)に示すような、θ1方向の周波数プロファイルであるθ1周波数プロファイルを作成する。ここでθ1周波数プロファイルには、目標信号とクラッタ信号が存在している。
次にクラッタ方向(θ2)を指向したタイミングのビデオ信号1〜3をそれぞれFFT処理し、周波数軸上で並べることで、図4(b)に示すような、θ2方向の周波数プロファイルであるθ2周波数プロファイルを作成する。ここでθ2周波数プロファイルにはクラッタ信号のみが存在している。
そして、θ1周波数プロファイルとθ2周波数プロファイルとの差分をとることで、目標信号を抽出できる。
【0015】
このようにして実施の形態1の誘導装置は、2つの周波数プロファイルを比較することで、目標からの反射信号とクラッタを弁別することができ、θ1周波数プロファイルから目標信号を弁別することが可能となる。
【0016】
なお、図1においては、受信部と局部発信部のセットを3セット有する誘導装置の例を記載したが、ビーム領域が受信帯域何個分に相当するかにより、2セットまたは4セット以上の場合でも、実施例1と同様に周波数プロファイルから目標信号を弁別することが可能である。
【符号の説明】
【0017】
1 誘導装置、2 目標、3 局部発振部(1)、4 送信部、5 アンテナ部、6 アンテナ角度制御部、7 受信部(1)、8 局部発振部(2)、9 受信部(2)、10 局部発振部(3)、11 受信部(3)、12 クラッタ形状判別部、13 目標検出部、14 受信帯域制御部、15 誘導信号計算部、16 海面または地表面、17 母機。
【特許請求の範囲】
【請求項1】
所定のパルス繰り返し周波数(PRF:Pulse Repetition Frequency)でパルス信号を送信し、目標で反射された反射信号にFFT処理を行うことで検出した目標に向けて飛しょう体を誘導する誘導装置であって、
前記パルス信号を送信し、目標からの反射信号を受信するアンテナ部と、
前記アンテナ部の方向を、目標方向あるいはクラッタの方向に制御するアンテナ角度制御部と、
前記アンテナ角度制御部に対して前記アンテナ部の方向を指定し、方向を指定した前記アンテナ部が受信した前記反射信号にFFT処理を行うことで前記目標を検出する目標検出部と、を備え、
前記目標検出部は、前記アンテナ部をクラッタ方向に向けたときの前記反射信号と、前記アンテナ部を目標方向に向けたときの前記反射信号との差分をとることにより、前記目標を検出することを特徴とする誘導装置。
【請求項2】
前記アンテナ角度制御部は、前記アンテナのアンテナパターンのピークゲインから、目標の検知に必要となる目標信号のレベルとノイズレベルとの差分だけゲインが低下する角度を算出し、当該角度と目標方向とを加算した方向を前記クラッタ方向に設定することを特徴とする請求項1記載の誘導装置。
【請求項3】
発振周波数が各々異なるn個の局部発信部(i)(i=1,2,・・・,n)と、
前記局部発信部の各々に対応し、前記局部発信部(i)の発振周波数で送信された前記パルス信号が前記目標で反射された反射信号を受信するn個の受信部(i)(i=1,2,・・・,n)と、を備え、
前記目標検出部は、前記受信部(i)(i=1,2,・・・,n)が各々受信した反射信号を用いてFFT処理を行うことで前記目標を検出することを特徴とする請求項1あるいは2に記載の誘導装置。
【請求項1】
所定のパルス繰り返し周波数(PRF:Pulse Repetition Frequency)でパルス信号を送信し、目標で反射された反射信号にFFT処理を行うことで検出した目標に向けて飛しょう体を誘導する誘導装置であって、
前記パルス信号を送信し、目標からの反射信号を受信するアンテナ部と、
前記アンテナ部の方向を、目標方向あるいはクラッタの方向に制御するアンテナ角度制御部と、
前記アンテナ角度制御部に対して前記アンテナ部の方向を指定し、方向を指定した前記アンテナ部が受信した前記反射信号にFFT処理を行うことで前記目標を検出する目標検出部と、を備え、
前記目標検出部は、前記アンテナ部をクラッタ方向に向けたときの前記反射信号と、前記アンテナ部を目標方向に向けたときの前記反射信号との差分をとることにより、前記目標を検出することを特徴とする誘導装置。
【請求項2】
前記アンテナ角度制御部は、前記アンテナのアンテナパターンのピークゲインから、目標の検知に必要となる目標信号のレベルとノイズレベルとの差分だけゲインが低下する角度を算出し、当該角度と目標方向とを加算した方向を前記クラッタ方向に設定することを特徴とする請求項1記載の誘導装置。
【請求項3】
発振周波数が各々異なるn個の局部発信部(i)(i=1,2,・・・,n)と、
前記局部発信部の各々に対応し、前記局部発信部(i)の発振周波数で送信された前記パルス信号が前記目標で反射された反射信号を受信するn個の受信部(i)(i=1,2,・・・,n)と、を備え、
前記目標検出部は、前記受信部(i)(i=1,2,・・・,n)が各々受信した反射信号を用いてFFT処理を行うことで前記目標を検出することを特徴とする請求項1あるいは2に記載の誘導装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−232034(P2011−232034A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−99750(P2010−99750)
【出願日】平成22年4月23日(2010.4.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月23日(2010.4.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]