
調整制御システム、軸受摩耗監視装置の調整方法及び軸受摩耗監視装置

【課題】軸受摩耗監視装置の交換の際に、わざわざ工場に送り返さずに現地でも調整ができ、軸受け交換を必要としない調整制御システム、軸受摩耗監視装置の調整方法及び軸受摩耗監視装置を提供する。
【解決手段】調整制御システム40は、Eモニタ30の赤外線通信器41を利用して軸受摩耗監視装置とデジタル通信する機能と、キャンドモータに取り付けられている複数の検出コイルの信号を作成するための調整データと代表的なロギング記録となる記録済み信号(基準波形)とを記憶するデータベース44と、軸受摩耗監視装置10に記録済み信号を疑似波形として出力する信号収集・信号発生器42と、疑似波形による変位を軸受摩耗監視装置から取得し、予め分かっている変位にて補正する補正手段と、これらの機器を制御する制御装置43と、制御装置43を操作するユーザインターフェース45と、を有している。
【解決手段】調整制御システム40は、Eモニタ30の赤外線通信器41を利用して軸受摩耗監視装置とデジタル通信する機能と、キャンドモータに取り付けられている複数の検出コイルの信号を作成するための調整データと代表的なロギング記録となる記録済み信号(基準波形)とを記憶するデータベース44と、軸受摩耗監視装置10に記録済み信号を疑似波形として出力する信号収集・信号発生器42と、疑似波形による変位を軸受摩耗監視装置から取得し、予め分かっている変位にて補正する補正手段と、これらの機器を制御する制御装置43と、制御装置43を操作するユーザインターフェース45と、を有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、キャンドモータにおける回転子の長手方向端部の変位および半径方向の変位を、固定子の長手方向両側にそれぞれ設置された検出コイルによって検出し、軸受における軸方向および半径方向の摩耗を監視するためにモータに取り付けられた軸受摩耗監視装置を調整する調整制御システム、軸受摩耗監視装置の調整方法及び軸受摩耗監視装置に関する。
【背景技術】
【0002】
従来から、モータとポンプとを一体とし、軸受け部、ロータ(回転子)及びインペラを取扱液中に収容してキャンの外側にステータを設置したキャンドモータポンプが知られている。モータは内側から、取扱液と接するキャン(ステータライナ)と、モータ端子が取り付けられたターミナルフランジのターミナルプレート及びステータの外周を覆うステータバンドと、による2重構造を有している。取扱液は、インペラで昇圧され吐出側へ送られると共に、その一部がモータ側に送られ、軸受けの潤滑、モータの冷却を行い、シャフトに設けられた貫通孔を通じて吸込側に戻る。
【0003】
キャンドモータポンプは液が外部に漏れることがなく、静粛性に優れたポンプとして、高い信頼性が要求されるプラントに使用されている。しかし、キャンドモータの軸受けは、取扱液による流体潤滑軸受けであり、外部から軸受けの状態を全く見ることができないため、軸受けの摩耗を監視する装置が不可欠なものとなっている。
【0004】
キャンドモータの軸受摩耗監視装置としては、特許文献1のキャンドモータの軸受摩耗監視装置がある。この軸受摩耗監視装置は、ステータの長手方向両端に設置された検出コイルにてロータの回転時に変化する磁界の変化を測定することで、ロータが半径方向に変位するようになった軸受けの摩耗監視や軸方向に変位又は傾斜状態に変位するように摩耗した軸受けの摩耗監視を行うものである。キャンドモータの使用状況にもよるが、一般的に、軸受けは摩耗により2年から3年周期で交換が必要である。電子部品で構成される回路基板は、軸受摩耗監視装置の検出コイル、ステータコイルと比べて寿命が短く、電子部品の劣化により5年から6年周期で回路基板の交換が必要となる。
【0005】
従来、軸受摩耗監視装置の中の回路基板を交換する際には、キャンドモータの軸の機械的な中心位置(メカニカルセンタ)と軸受摩耗監視装置で検出される磁界検出による中心位置(マグネットセンタ)とが一致するようなゼロ点調整を行う必要から、作業の効率化を考慮して軸受け自体も新しいものに交換する場合が多い。また、軸受摩耗監視装置はキャンドモータの回転による誘起電圧を検出するため、当該ゼロ点調整はモータを回転させながら調整を行う必要がある。
【0006】
特許文献2には、キャンドモータの軸受摩耗監視装置における軸方向ゼロ点調整方法が記載されている。特許文献2には、ロータとステータの軸方向の中心位置(メカニカルセンタ)を設定した後に、メカニカルセンタにおいて検出コイルの出力信号を同一レベルに調整することにより、軸受摩耗監視装置の軸方向ゼロ点であるマグネットセンタをメカニカルセンタに対応させる調整方法が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許3488578号
【特許文献2】特許3637553号
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、軸受け自体に問題がなく、軸受摩耗監視装置だけが故障した場合にも、軸受けの交換と軸受摩耗監視装置の交換が発生する場合がある。また、ステータ製造時の機械公差により軸受摩耗監視に使用する検出コイルの信号はキャンドモータ毎に特性が異なる。さらに、軸受摩耗監視装置の設定状態を新たな軸受摩耗監視装置に設定し、検出コイルの信号に合うように調整しても十分な精度を得ることができず、検出コイルの信号以外に軸受摩耗監視装置の入力回路の特性も影響する場合があることが本出願人の調査により明らかになった。特に、十分な調整機器がない現地では、調整作業を行うことは困難であることからキャンドモータポンプ全体を工場に送り、再調整をする必要があった。これは、軸受摩耗監視装置の入力回路の特性のばらつきと、キャンドモータポンプに設けられている流体潤滑による滑り軸受けを機能させるために取扱液中でキャンドモータを回す必要があることも関係している。
【0009】
そこで、本発明に係る調整制御システム、軸受摩耗監視装置の調整方法及び軸受摩耗監視装置は、軸受摩耗監視装置の交換の際に、キャンドモータポンプ全体をわざわざ工場に送り返さずに現地でも調整ができ、軸受け交換を必要としない調整制御システム、軸受摩耗監視装置の調整方法及び軸受摩耗監視装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
以上のような目的を達成するために、本発明に係る調整制御システムは、回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換手段と、信号変換手段からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整手段と、中心位置調整手段により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換手段と、を有し、モータ軸受けにおける軸方向の摩耗量を監視する軸受摩耗監視装置であって該軸受摩耗監視装置を調整する調整制御システムにおいて、軸受摩耗監視装置と通信する通信手段と、検出信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を軸受摩耗監視装置に出力する出力手段と、記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信手段により取得し、予め分かっている変位にて補正する補正手段と、を有し、軸受摩耗監視装置の信号変換手段は入力アンプを有し、入力アンプの特性を補正手段にて補正することを特徴とする。
【0011】
また、本発明に係る調整制御システムにおいて、信号変換手段の入力前段から検出コイルの検出信号を取り出して記録済み信号として記録する信号記録手段と、記録した記録済み信号をモータの識別ID毎に管理する管理手段と、を有することを特徴とする。このような機能は、特に、工場出荷時におけるモータ特性を管理する上で重要であり、さらに、検出コイルの検出信号を記録することで、軸受摩耗監視装置の調整が可能となる。
【0012】
また、本発明に係る調整制御システムにおいて、予め記録された各検出コイルの検出信号は、基準となる検出信号の振幅値を所望の信号レベルに可変する可変手段を経て出力されることを特徴とする。この機能を用いることにより、モータの生産台数の増加と共に増加する記録済み信号をモータの構造別に集約することで、増加割合を低減することができる。ここで、記録済み信号は、調整制御システムに記憶されている基準となる波形データである。各検出コイルの検出信号をロギング波形として収集してそのまま使用するのではなく、複数収集されたロギング波形から共通の特性を有する波形データを基準波形として記録し、ロギング波形と同等の特性となる擬似波形を可変手段が出力する。記憶容量の圧縮のためである。
【0013】
本発明に係る軸受摩耗監視装置の調整方法は、回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、モータ軸受けにおける軸方向および半径方向の摩耗を監視する軸受摩耗監視装置を調整する調整方法において、各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換工程と、信号変換工程からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整工程と、中心位置調整工程により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換工程と、各検出コイルの出力信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を軸受摩耗監視装置に出力する出力工程と、調整制御システムの制御装置と通信を行う通信工程と、記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信工程により取得し、予め分かっている変位にて補正する補正工程と、を含み、信号変換工程は、整流回路と積分回路により合成信号を直流信号に変換する入力フィルタを有し、入力フィルタを補正工程にて補正することを特徴とする。
【0014】
また、本発明に係る軸受摩耗監視装置の調整方法において、信号変換工程の入力全段から検出コイルの検出信号を取り出して記録済み信号として記録する信号記録工程と、記録した記録済み信号をモータの識別ID毎に管理する管理手段と、を含むことを特徴とする。
【0015】
本発明に係る軸受摩耗監視装置は、回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、モータ軸受けにおける軸方向の摩耗を監視する軸受摩耗監視装置において、各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換手段と、信号変換手段からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整手段と、中心位置調整手段により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換手段と、摩耗量を表示する表示手段と、各検出コイルの出力信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を調整制御システムから受け入れる受入手段と、調整制御システムの制御装置と通信を行う通信手段と、を有し、さらに、信号変換手段は、整流回路と積分回路により合成信号を直流信号に変換する入力フィルタを有し、調整制御システムは、記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信手段により取得し、予め分かっている変位にて入力フィルタの補正を行う補正手段と軸受摩耗監視装置の中心位置調整手段とを実行し、摩耗量変換手段を調整することを特徴とする。
【0016】
また、本発明に係る軸受摩耗監視装置において、信号変換手段の入力前段から検出コイルの出力信号を取り出して調整制御システムに記録させる信号記録手段を有することを特徴とする。この信号記録手段は、単なるコネクタによるケーブルの差し替え手段にて実現しても良いが、好適にはバッファ回路を介して検出コイルの出力信号に影響を与えにくい構成が望ましい。
【発明の効果】
【0017】
本発明に係る調整制御システム及び軸受摩耗監視装置の調整方法を使用することで、モータ(キャンドモータ)に取り付けられている軸受摩耗監視装置の交換の際に、わざわざキャンドモータポンプ全体を工場に送り返さずに現地でも調整ができ、キャンドモータの軸受け交換を省略することができるという効果がある。また、本発明に係る調整制御システムを使用することで、特定のキャンドモータに適合する軸受摩耗監視装置を工場にて製造した後、検出コイルの検出信号を記録することで、現地では予め記録した検出信号を用いて故障した軸受摩耗監視装置と新しい軸受摩耗監視装置とを交換するだけで調整作業を含めて終了させることが可能になるという効果がある。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係る軸受摩耗監視装置を調整する調整制御システムの構成図である。
【図2】本発明の実施形態に係る軸受摩耗監視装置の構成を示す構成図である。
【図3】本実施形態に係る軸受摩耗監視装置を搭載したキャンドモータポンプの概要図である。
【図4】図3のキャンドモータの縦断面における検出コイルの設置状況とロータの移動方向を説明する説明図である。
【図5】図4のステータに配置した複数の検出コイルと検出コイルの拡大図である。
【図6】図3のキャンドモータの端子箱を固定しているボルトをはずして軸受摩耗監視装置と調整制御システムとを電気的に接続した状態を説明する説明図である。
【図7】本実施形態に係る軸受摩耗監視装置の概要特性を説明する説明図である。
【図8】図7の調整制御システムにおける概要特性の一例を説明する説明図である。
【図9】本実施形態における中心位置調整時の検出コイルの出力電圧特性を説明する説明図である。
【図10】本実施形態における中心位置調整時の検出コイルの出力電圧特性を説明する説明図である。
【図11】本実施形態に係る軸受摩耗監視装置の調整処理の流れを示すフローチャート図である。
【図12】本実施形態に係る基準波形の準備処理の流れを示すフローチャート図である。
【図13】本実施形態に係るラジアル調整の処理の流れを示すフローチャート図である。
【図14】本実施形態に係るスラスト調整の処理の流れを示すフローチャート図である。
【図15】図14のスラスト調整の処理の流れにおけるフロント、センタ、リアの特性図である。
【図16】図14にて算出した特性図に基づくLED表示の一例を説明する説明図である。
【図17】本実施形態に係る軸受摩耗監視装置で求めたVrms値の表である。
【図18】軸受摩耗監視装置を調整する調整制御システムの変形例である。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための最良の形態(以下実施形態という)を、図面に従って説明する。
【0020】
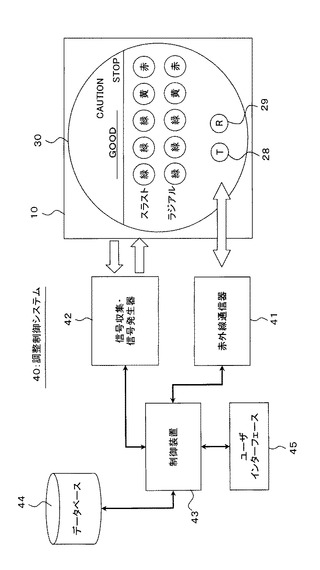
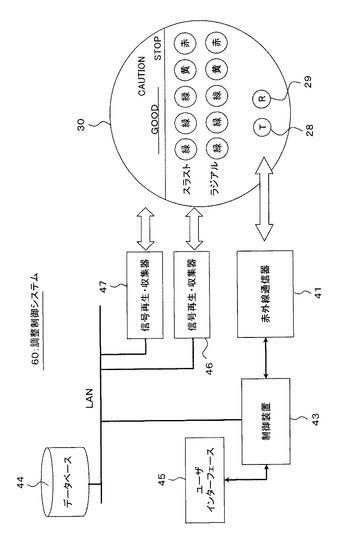
図1は軸受摩耗監視装置10を調整する調整制御システム40の構成を示し、図1を用いて調整制御システム40を概説する。なお、本出願人は軸受摩耗監視装置10を「日機装Eモニタ」(登録商標)と呼んでいることから、本明細書では軸受摩耗監視装置10の表示部をEモニタと呼ぶ。通常、軸受摩耗監視装置10はキャンドモータに取り付けられた複数の検出コイルに接続され、検出コイルによって検出される信号に基づいて軸受けの摩耗量を算出し、表示部であるEモニタ30に摩耗量を表示する。Eモニタ30には、摩耗量を表示するためLEDのバー表示と赤外線通信のための送信素子28と受信素子29が取り付けてある。
【0021】
調整制御システム40は、Eモニタ30の赤外線通信を利用して軸受摩耗監視装置とデジタル通信する機能と、キャンドモータに取り付けられている複数の検出コイルからの信号を取り込むロギング記録と、一時的にロギング記録された複数の波形から基準波形を決定すると共に、基準波形を記録済み信号として記憶し、記録済み信号をロギング記録と等価な擬似波形として再生する機能と、を有している。ここで、基準波形は新しい設計のキャンドモータが完成した時に記録された波形であり、調整制御システム40は、同じ型式のキャンドモータにおける工場出荷時のロギング記録をその基準波形に基づいてゲインやオフセットなどの調整データを求める。擬似波形は、基準波形と工場出荷時に記憶された調整データに基づいて調整することにより、工場出荷時の波形と等価な波形となる。調整制御システム40は、記録済み信号から作成した擬似波形を軸受摩耗監視装置10に出力することにより、キャンドモータを作動させることなく軸受けの摩耗状態を模擬させることができる。
【0022】
このような機能を実現させるため、調整制御システム40は、軸受摩耗監視装置10の調整に必要な記録済み信号である基準波形や各種情報を記憶するデータベース44と、検出コイルからの信号を記録する、又は、軸受摩耗監視装置10に基準波形から作成した擬似波形を出力する信号収集・信号発生器42と、擬似波形による変位を軸受摩耗監視装置から取得し、予め分かっている変位にて補正する補正手段と、軸受摩耗監視装置10のEモニタ30とデジタル通信を行う赤外線通信器41と、これらの機器を制御する制御装置43と、制御装置43を操作するユーザインターフェース45と、を有している。ここで、データベース44は調整データと基準波形の波形データを記録しており、調整データに記録されているのは調整時の調整パラメータ、調整時の各コイルの数値データ等である。なお、これら数値データは、電圧計等の機能を用いた測定値でも良い。
【0023】
Eモニタ30は、キャンドモータの軸方向であるスラスト方向の摩耗を表示すると共に、半径方向であるラジアル方向の摩耗を表示するための表示器である。表示器は、バー表示を構成する3つの緑灯、1つの黄灯及び1つの赤灯を有し、バー表示の近傍には、調整制御システム40の赤外線通信器41とデジタル通信するための送信素子28及び受信素子29と、を備えている。
【0024】
よって、調整制御システム40は、データベース44から基準波形を入手し、信号収集・信号発生器42により基準波形から擬似波形を作成して軸受摩耗監視装置10へ出力し、Eモニタ30に表示された情報や内部情報を赤外線によるデジタル通信によって入手することで、様々な状況を再現すると共に、軸受摩耗監視装置10の動作を評価することができる。次に、軸受摩耗監視装置について詳説する。
【0025】
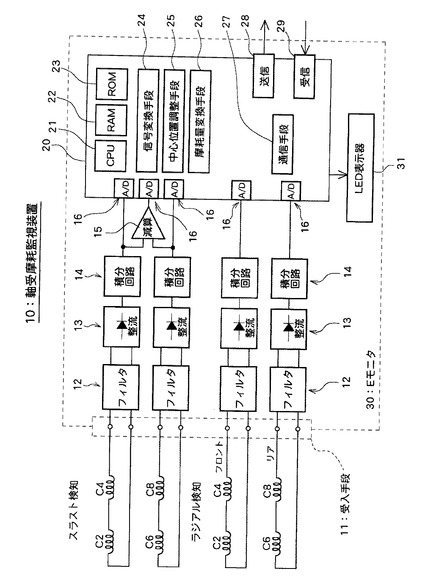
図2は軸受摩耗監視装置10の構成を示している。軸受摩耗監視装置10は、軸受けのスラスト方向(軸方向)の摩耗を検出する検出コイルC2,C4,C6,C8及びラジアル方向(半径方向)の摩耗を検出する検出コイルC1,C3,C5,C7と、当該検出コイルで検出した検出信号から所望の信号を分離するためのアンプ群であって、フィルタ12,整流回路13及び積分回路14にて直流信号に変換する信号変換手段24と、信号変換された直流信号のゲインとオフセットを調整する中心位置調整手段25と、調整された信号を摩耗量に変換する摩耗量変換手段26と、算出した摩耗量を表示するLED表示器31と、制御装置と通信するための通信手段27と、検出コイルで検出した交流信号の替わりに、検出コイルの交流信号である基準波形や擬似波形などを受け入れる受入手段11と、を有している。
【0026】
軸受摩耗監視装置10は、大きく分けて3つの構成を有している。第1の構成は、軸受けのスラスト方向及びラジアル方向の摩耗を検出するため、ステータに取り付けられた検出コイルC1〜C8である。第2の構成は、Eモニタ30の基板に配置されたフィルタ12,整流回路13,積分回路14及び減算器15などのアナログ回路である。第3の構成は、Eモニタ30の基板に配置され、制御部20を形成するCPU21,RAM21,ROM23及びA/D変換器16などのデジタル回路と、赤外線による送信素子28と受信素子29及びLED表示器31とのインターフェース回路である。次に、信号の流れと共に機能を説明する。
【0027】
スラスト方向の検出コイルC2,C4,C6,C8(スラスト検出)とラジアル方向の検出コイルC1,C3,C5,C7(ラジアル検出)が検出した信号は、所定の組み合わせにより合成され合成信号として受入手段11を介してEモニタ30に入力される。受入手段11は、Eモニタ30が検出コイルC1〜C8からの信号を受け入れることが可能であると共に、キャンドモータポンプに取り付けられている検出コイルC1〜C8の信号を記録する調整制御システムに出力することが可能であり、さらに、調整制御システムに記録された検出コイルC1〜C8のロギング記録を受け入れることが可能である。本実施形態における受入手段11は、コネクタのつなぎ替えにて実現しているが、Eモニタ30にバッファ回路と切換え回路を設けることでコネクタのつなぎ替えを省く構成にしてもよい。
【0028】
検出コイルC1〜C8が検出した信号は、モータの主磁束変化(基本波成分)とロータに設けられたロータバーの磁束変化(基本波成分よりも周波数の高い高調波成分)を含んでいる。このため、本実施形態では検出コイルC1〜C8の信号をフィルタ12に入力して基本波成分と安定した高調波成分を取り出すことにした。フィルタ12によって取り出された基本波成分などは、整流回路13にて整流され、後段の積分回路14にて直流に変換される。
【0029】
次に、ラジアル検出について概説する。図2の左側下段のラジアル検出において、Eモニタ30は、制御部20のA/D変換器16にて検出コイルC1,C3のアナログ信号をデジタル信号に変換する。ラジアル方向にロータが移動した場合には、Eモニタ30は高調波成分の差が増大することで判定することができる。また、検出コイルC1,C3及び検出コイルC5,C7は独立回路であるため、Eモニタ30は両者を比較して偏摩耗を検出することができる。
【0030】
次に、スラスト検出について概説する。図2の左側上段のスラスト検出において、Eモニタ30は、制御部20のA/D変換器16にて検出コイルC2,C4と検出コイルC6,C8のアナログ信号をデジタル信号に変換する。次に、2つのスラスト方向の信号における差分を減算器15によって求め、A/D変換器16にてデジタル信号に変換する。Eモニタ30は、スラスト方向にロータが移動した場合には、基本波成分の差分がほとんど無い状態から基本波波形の差分が増大し、これに応じて出力電圧が上昇することでスラスト方向の摩耗を検出することが可能となる。次に、キャンドモータポンプの構造について概説する。
【0031】
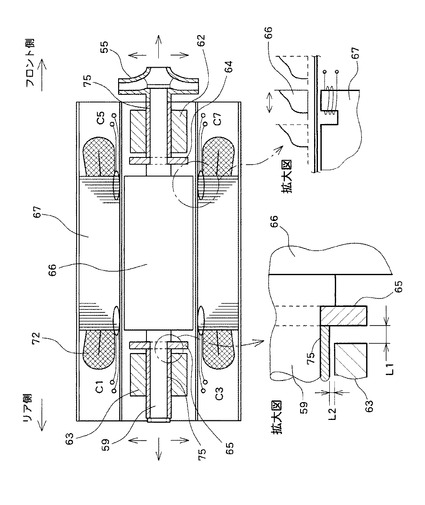
図3は軸受摩耗監視装置10を搭載したキャンドモータポンプ50の概要を示している。図3のキャンドモータポンプ50は、ポンプ部52とスタンド69に取り付けられたモータ部53とを有し、ポンプ部52とモータ部53は、アダプタ54により接続されている。ポンプ部52は、インペラ55を収容したポンプ室56内に連通する吸引管部57と吐出管部58を有し、インペラ55はモータ部53のシャフト59の延長端部に取り付けられている。シャフト59には、フロント・リア方向へのシャフト59の移動を制限するスラストワッシャ64,65が設けられている。また、吐出管部58から導入された取扱液の一部は、軸受け62,63の潤滑及びモータ部53の冷却を行い、その後、吸引管部57へ排出される。
【0032】
モータ部53は、ロータ66とステータ67を有し、ロータ66のシャフト59はフロント側の軸受け62とリア側の軸受け63に回転自在に支持されている。また、ステータ67は、モータ巻線72と、軸受けの摩耗によるロータの変位を検出するためステータ67の両端部に設けられた検出コイル(C1,C2)と、を有している。モータ巻線72はターミナル端子68を介してキャンドモータポンプ50の端部に設けられた端子箱71に接続され、端子箱71の上部には軸受の摩耗状態を監視してその内容を表示する軸受摩耗監視装置10とEモニタ30とが取り付けられている。
【0033】
図4は図3のキャンドモータポンプ50の縦断面における検出コイルC1,C3,C5,C7の設置状況とロータ66の移動方向を示している。ここで、すでに説明した構成については説明を割愛する。図4に示すように検出コイルC1,C3,C5,C7はステータ67の長手方向の両端部に180度の間隔を有して向かい合うように配置され、半径方向の変位を検出すると共に、いくつかの検出コイルを組み合わせる(合成する)ことにより図4の右側の拡大図に示したようにフロント・リア方向の変位が検出可能である。検出コイルは軸受の摩耗を直接検出するものではなく、例えば、図4の左側の拡大図に示したようにシャフト59に設けられた軸受け63とスラストワッシャ65との間隔(L1)が摩耗によって広がったことをステータ67に取り付けられた検出コイルによってスラスト方向の変位を検出するものである。同様に、検出コイルは、シャフトスリーブ75と軸受け63との間隔(L2)が摩耗によって広がることによるラジアル方向の変位を検出する。
【0034】
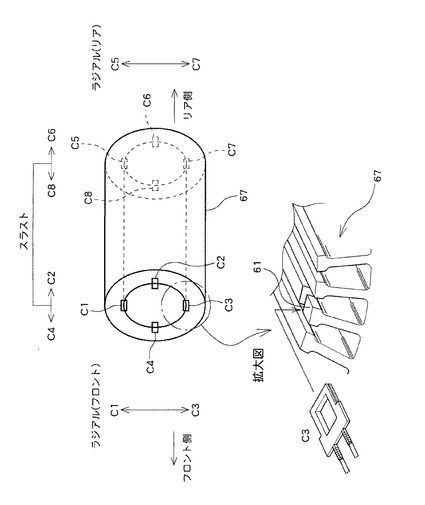
図5は図4のステータ67に配置した複数の検出コイルC1〜C8と所定の検出コイルC3の拡大図を示している。図に示すように検出コイルC1とC3によりフロント側のラジアル方向(半径方向)の変位を検出することができ、同様に検出コイルC5とC7によりリア側のラジアル方向の変位を検出することができる。また、フロント・リア方向のスラスト方向の変位は検出コイルC4,C2と検出コイルC8,C6との組み合わせによってスラスト方向(軸方向)の変位を検出することが可能となる。なお、検出コイルC3は扁平なボビン形状であり、図5の拡大図に示すようにステータ67端部の鉄心歯部61に設けられた切り欠きにはめ込まれている。
【0035】
本実施形態のキャンドモータポンプのシャフトには、軸横スラスト方向に約±1mm遊びを持たせている。そこで、制御部20は、センタ、フロント、リアの3種類の位置情報を通信手段27により外部制御器から受け入れ、各検出コイルC1〜C8の信号に基づいて中心位置調整手段25を実行することで、メカニカルセンタとマグネットセンタとを一致させることが可能となる。その後、制御部20は、中心位置調整手段25により調整した信号に基づいてラジアル方向の摩耗とスラスト方向の摩耗を摩耗量変換手段26にて求め、各方向の摩耗をLED表示器31に表示する。
【0036】
図6は図3のキャンドモータの端子箱71を固定しているボルトをはずして軸受摩耗監視装置10と調整制御システム40とを電気的に接続した状態を示している。図6は大きく分けて3つで構成されている。第1はキャンドモータのターミナル端子68を収容する端子箱71であり、第2は端子箱71の上にボルトによって取り付けられている筐体87であり、第3は筐体87の上に取り付けられている赤外線通信器41及び制御装置43である。筐体87には、トランス84及び複数のプリント基板83で構成された軸受摩耗監視装置10が収容され、筐体の上部のガラス窓86から表示板85を見ることができる。表示板85には摩耗状態を表示するためのLED表示器31、調整制御システム40と通信をするための送信素子28、受信素子29が取り付けられている。
【0037】
ターミナル端子68にはステータコイル端子73と検出コイル端子74がガラス密封端子板81に取り付けられており、ステータコイル端子73に電源ケーブル77が接続されている。さらに、電源ケーブル77は電線挿通孔82を通して端子箱71の外に伸びている。一方、検出コイル端子74から伸びる信号線76は軸受摩耗監視装置10のプリント基板83に接続されている。また、検出コイル端子74には、検出コイルの信号を記録するためのプローブ88が接続されている。プローブ88は信号を効率よく収集するためにハイインピーダンス回路を内蔵している。
【0038】
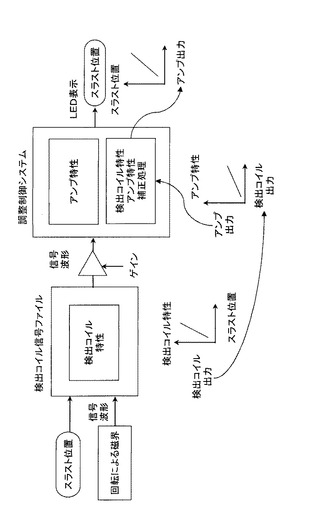
図7は軸受摩耗監視装置の概要特性を示し、調整制御システムによって入力された信号に対する出力を示している。調整制御システムは、軸受摩耗監視装置の受入手段によりフロント、センタ、リア位置の各スラスト位置における検出コイルの検出信号(交流信号)をロギング記録として取得し、調整制御システムは、これらのロギング記録の中から標準的な波形を基準波形となる検出コイル信号ファイルとしてデータベースに記録する。検出コイル信号ファイルには、スラスト位置、検出コイルによって検出された回転による磁界の信号波形が記録されている。この検出コイル信号ファイルは、モータの特性のばらつきにより出力レベルは変化するが、キャンドモータの形式や種類が同一であれば、所定のばらつきに収まることが経験的に知られている。そこで、本実施形態では、基準波形となる検出コイル信号ファイルを作成し、ロギング記録とのゲインの差異を測定して「基準波形」と「ゲイン係数」を組み合わせることにした。この組み合わせにより、キャンドモータ毎のセンタ位置、フロント位置、リア位置などの記録波形をキャンドモータ毎管理する替わりに、データ量が少なくなるように「基準波形」と「調整データ」を管理する。本実施形態では、キャンドモータの形式や種類毎に「基準波形」となるセンタ位置、フロント位置、リア位置の記録波形を元にしてロギング記録とのゲインの差異を示す「ゲイン係数」を適用することにより基準波形から擬似波形を作成し、ロギング記録のような検出コイル信号ファイルの増大によるデータベース44の肥大化を防止している。
【0039】
調整制御システムによって調整する要素は、軸受摩耗監視装置のアンプ特性である。検出コイル信号ファイルに記録された検出コイル特性は、スラスト位置(横軸)に対する検出コイル出力(縦軸)であり、アンプ特性を補正するために検出コイル出力(横軸)に対するアンプ出力(縦軸)を調整制御システムが作成し、軸受摩耗監視装置へ補正情報として書き込み、軸受摩耗監視装置はこの補正情報に基づいてスラスト位置を出力することができる。
【0040】
本実施形態の軸受摩耗監視装置では、信号変換手段において検出コイルによって検出された基本波成分と高調波成分を直流のrms値に変換してA/D変換することで回路のコストダウンを実現している。軸受摩耗監視装置の信号変換手段にはアナログ回路や複数のオペアンプを使用していることから、これらのアンプ特性により装置毎に特性が若干異なる。さらに、検出コイルの検出信号にも検出コイル毎に特性が異なることから、検出コイルの特性の補正と装置毎のアンプ特性の補正をする必要がある。
【0041】
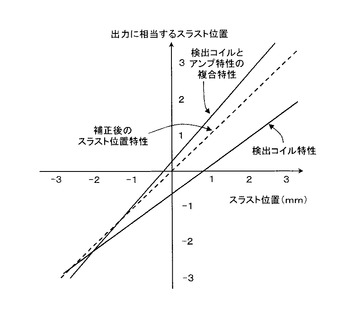
図8は図7の軸受摩耗監視装置の概要特性の一例を示し、検出コイルの特性におけるスラスト位置と検出コイルの出力に相当するスラスト位置及び、検出コイルとアンプ特性の複合特性を実線で示し、補正後のスラスト位置特性を破線で示している。この図に示すように、検出コイル特定とアンプ特性の複合特性が影響することから、正確なスラスト位置特性を得る為には、検出コイルの特性とEモニタのアンプ特性とを考慮して補正する必要がある。
【0042】
一般的に、軸受摩耗監視装置を交換する際には、キャンドモータが機械的な中心位置(メカニカルセンタ)に来るように軸受けを新品に交換すると共に、機械的な中心位置と軸受摩耗監視装置で検出される磁界検出による中心位置(マグネットセンタ)とが一致するようなゼロ点調整を行う必要がある。そこで、本発明に係る軸受摩耗監視装置では、新品の軸受けの遊びをメカニカルセンタから±50%とし、各検出コイルにて検出した交流信号を記録(ロギング記録)し、記録された交流信号(ロギング記録)を使用してマグネットセンタを補正することにした。このような方法を用いることにより、軸受摩耗監視装置の交換だけで済み、作業効率が向上する。
【0043】
図9と図10は中心位置調整時の検出コイル出力電圧特性を示している。以下、軸受摩耗監視装置の交換における基準波形を用いた中心位置調整について概説する。図9は中心位置調整前の検出コイル出力電圧の一例であり、実線は検出コイルC2,C4の出力を示し、破線は検出コイルC6,C8の出力を示し、Eモニタのアンプ特性と検出コイルの検出コイル特性との複合特性によりメカニカルセンタとマグネットセンタがずれている状態を示している。図9のようにメカニカルセンタとマグネットセンタがずれていると差分が調整可能な許容値を超えてしまうことから、メカニカルセンタとマグネットセンタを一致させるため、フロント、センタ、リアの各位置における基準波形を使用して中心位置調整を行う。図10は、後述する中心位置調整によりメカニカルセンタとマグネットセンタとを一致させた状態を示している。メカニカルセンタとマグネットセンタとを一致させることにより、差分が調整可能な範囲となり、摩耗監視の精度を保つことが可能となる。なお、中心位置調整は、軸受摩耗監視装置の調整処理の一部であり、調整処理は中心位置調整の他に、ゲインの設定、しきい値の調整などを含む。次に、調整処理の流れについて詳説する。
【0044】
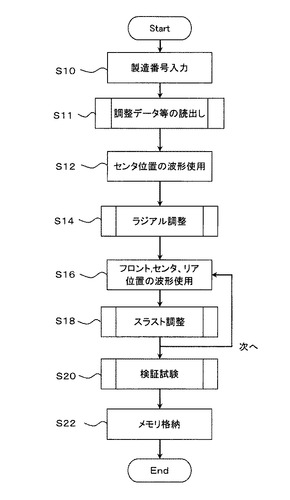
図11は軸受摩耗監視装置の調整処理の流れ(メインルーチン)を示し、図1の調整制御システムの処理について示している。図11に示すように調整処理は、調整データや波形等の読出(S10)、センタ位置の波形使用(S12)、センタ位置におけるラジアル調整(S14)、フロント,センタ,リア位置の波形使用(S16)、フロント,センタ,リア位置におけるスラスト調整(S18)、検証試験(S20)及びメモリ格納(S22)の流れになる。図1のデータベース44は、調整データと波形データを記録するキャンドモータの製造からメンテナンス全般に関するデータベースであり、キャンドモータの型式、作動電圧、ポンプリフト量、製造時におけるゲイン設定等の調整パラメータを記録している。以下、図10のメインルーチンと図11〜13のサブルーチンを用いて処理の流れを示す。
【0045】
図11の調整処理(メインルーチン)が開始すると、制御装置43はステップ10において、操作者から交換対象となっている軸受摩耗監視装置の個体(キャンドモータポンプ)を識別する製造番号を受け付ける。制御装置43が製造番号を受け付けると、製造番号に紐付けられた作業領域を確保する。次に、制御装置43はステップS11の波形データ読出しサブルーチンを実行する。この処理は図12に示すように、基準波形の準備処理のための波形読出し(サブルーチン)であり、製造番号に紐付けられた調整データを読み出し、調整データから基準波形を決定し、データベースへアクセスして該当ファイルがあるかどうかをステップS30で問い合わせる。該当ファイルがある場合には、ステップS32にてデータベースへアクセスを行い、ステップS36にて基準波形を読み出し、ステップS38にて基準波形をメモリに格納する。
【0046】
もし、ステップS30にて該当ファイルが見つからない場合には、通常仕様モータの該当ファイルが無いことを操作者に通知し、相当品の基準波形等を使用しても良いかを確認するためにステップS34の別メディアからの読込み処理を実行する。特別仕様モータの基準波形は通常仕様モータの基準波形と異なることから、自動でデータをダウンロードさせず、必要に応じて操作者自身が別メディアからダウンロードを行う。
【0047】
格納された基準波形は、1つの波形ではなく、中心位置調整に必要な複数の波形が所定のwfsフォーマットにて記述されている。wfsフォーマットは、ポンプ運転時に流体的に平衡する位置のフロント検出コイルとリア検出コイルの波形データなどの複数のフィールドを有している。制御装置43は基準波形をメモリに格納し、ステップS38を終了すると、図11のメインルーチンのステップS11へ戻り、ステップS12へ移る。
【0048】
図11のステップS12は、センタ位置の基準波形を使用してラジアル調整を行うための波形読み出しに関する確認処理である。なお、wfsフォーマットによるファイル名は、モータ枠、電圧、周波数及び中心位置調整に必要な情報を組み合わせて作成している。使用するファイルの確認を行った後、ステップS14のラジアル調整(サブルーチン)に移る。
【0049】
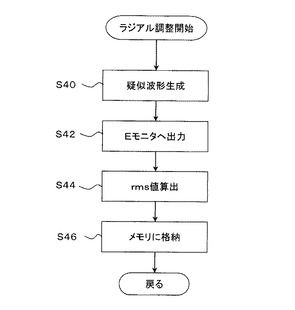
図13はラジアル調整のサブルーチンの流れを示している。ステップS40は擬似波形生成処理である。擬似波形は、基準波形にゲイン係数をかけたものであり、ゲイン係数は次の式で示される。ゲイン波形は、ゲイン係数=調整データの検出コイル出力電圧/基準波形の検出コイル電圧・・(式1)である。このことから、擬似波形は、擬似波形=ゲイン係数*基準波形・・(式2)であり、基準波形を実際の検出コイルの出力電圧に近づけた波形である。
【0050】
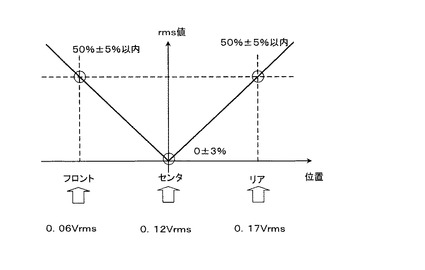
図17は軸受摩耗監視装置で求めたリア、センタ、フロント位置におけるスラスト方向及びラジアル方向のリアコイルとフロントコイルとの電圧値(ロギング記録)を示している。例えば、図17のセンタ位置、ラジアル方向のリアコイルにおけるロギング記録の検出コイル出力電圧が0.04Vrmsであり、基準波形の検出コイル電圧が0.02Vrmsの場合、ゲイン係数は式1から0.04/0.02=2.0となる。従って、疑似波形は2.0*基準波形からロギング記録と同じ波形を生成することが可能となる。つまり、基準波形とゲイン係数(2.0)を算出するだけで、キャンドモータ毎の膨大なロギング記録を管理する必要がなくなり記憶容量の削減ができる。言い換えると、標準的な基準波形を記憶すると共に、キャンドモータ毎の調整データだけ記憶することで、ロギング記録に近い擬似波形を作り出すことができる。
【0051】
図13のステップS40にて擬似波形生成が終了すると、図1の信号収集・信号発生器42からEモニタ30へ擬似波形が出力される(ステップS42)。Eモニタ30は、取得した擬似波形からrms値を算出する(ステップS44)。Eモニタ30はステップS46にて赤外線通信器41によるデジタル通信で受信したセンタ位置情報と共にrms値をメモリに格納した後(ステップS46)、サブルーチンを終了して図11のステップS14に戻り、ステップS16に移る。
【0052】
図11のステップS16は、スラスト調整のためのフロント、センタ、リア位置のロギング記録に相当する基準波形を使用してラジアル調整を行うための波形読み出しに関する確認処理である。この確認処理は、上述したステップS12と同様にデータベースから必要な波形を読み出すための処理である。ステップ16の確認処理が終わると、ステップS18のスラスト調整(サブルーチン)に移る。
【0053】
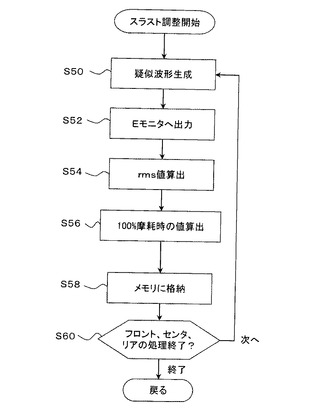
図14はスラスト調整(サブルーチン)の流れにおけるフロント、センタ、リア位置調整の処理の流れを示している。上述したラジアル調整(サブルーチン)では、フロント、リア位置での検出コイル電圧の差異がほとんど無いため、図16に示したセンタ位置の擬似波形により処理を行ったが、スラスト調整サブルーチンでは、フロント、センタ、リア位置でrms値を含めて所定の数値範囲に収まるかどうかを検証する点が異なる。以下、図13のステップS50〜ステップS60について詳説する。
【0054】
図14のスラスト調整サブルーチンのステップS50において、図1の制御装置43は、フロント、センタ、リア位置それぞれの擬似波形を生成するためにゲイン係数を基準波形に適用して擬似波形を生成する。ここで、ゲイン係数はwfsフォーマットの値を用いることになるが、ゲイン係数の算出方法について説明する。
【0055】
図17の表(スラスト方向のフロント位置)において、例えば、基準波形の検出コイル電圧rmsが0.9Vrmsであるので、リアコイルのゲイン係数は0.97/0.9=1.07となる。また、フロントコイルのゲイン係数は0.92/0.9=1.02となる。制御装置43はこれらのゲイン係数を用いてリア側とフロント側の基準波形から擬似波形を生成する。次に、制御装置43はステップS52において、生成した擬似波形を信号収集・信号発生器42からEモニタ30へ出力してステップS54に移る。Eモニタ30はステップS54において、擬似波形からリアコイルrms−フロントコイルrms値を算出して赤外線通信器のデジタル通信により制御装置43に送信する。制御装置43は、各rms値を受信してステップS56を実行する。
【0056】
ステップS56において、フロント、センタ、リア位置における各rms値は、新品の軸受けによる遊びであるので、この距離を摩耗時の移動距離の50%と設定し、制御装置43は100%摩耗時のrms値を算出する。ここで、図15は図14のスラスト調整の処理の流れにおけるフロント、センタ、リアの特性を示し、図17で示したrms値をフロント、センタ、リア位置に表示している。図15のフロント及びリア位置での許容誤差範囲は±5%以内とし、センタ位置での許容誤差範囲は±3%以内に収まるようにしている。これは、この値を元に、100%摩耗時のrms値を算出することから、上記許容誤差を超えると正確な摩耗監視が困難だからである。また、図15のフロント側のrms値は表示上極性を逆にして表示している。この理由は、表示グラフ面積を縮小するものであり、ユーザインターフェース上にグラフを表示する際の省スペース化を実現するものである。
【0057】
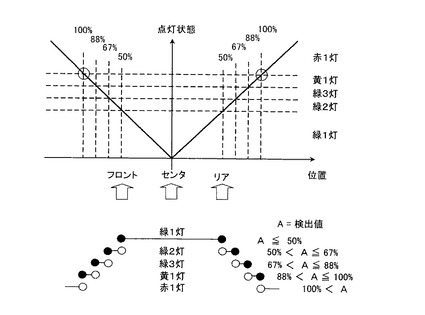
図16は図15にて算出した特性図に基づくEモニタ30におけるLED表示の一例を示している。図14のステップS56では、移動距離が50%の位置におけるrms値を元に100%摩耗時のrms値を算出している。通常、移動距離が50%以内であれば緑1灯は常時点灯する。以下、緑2灯から赤1灯までの点灯条件について示す。緑2灯は移動距離が50%を超え67%以下となった時に点灯し、緑3灯は移動距離が67%を超え88%以下となった時に点灯し、黄1灯は移動距離が88%を超え100%以下となった時に点灯し、赤1灯は移動距離が100%を超えると点灯する。このように、点灯条件が移動距離に相当するrms値で得られることから、制御装置43は図14のステップS58において、赤外線通信により各rms値をEモニタのメモリに格納する。制御装置43はステップS60において、以上の処理をフロント、センタ、リアの各位置で実行し、終了するまで繰り返す。各処理が終了した場合には、ステップS60を終了し、図11のステップS20のステップS18に戻り、ステップS20の検証サブルーチンに移る。
【0058】
図11のステップS20では、一連の設定処理が終了したことを制御装置43が操作者に通知し、Eモニタ30のLED表示を順番に点灯させるための擬似信号をEモニタ30に出力して検証試験を実行する。この検証試験により、Eモニタ30の設定が正常に実行できたか否かを容易に判断することが可能となる。制御装置43はステップS20の検証試験が終了した後、ステップS22に移動し、設定した情報をEモニタ30に格納すると共に、制御装置43からデータベース44に必要な情報の格納を行う。以上の処理にてメインルーチンの処理が終了する。
【0059】
図18は図1の軸受摩耗監視装置(Eモニタ30)を調整する調整制御システムの変形例を示し、ネットワーク化された工場内での生産ラインの状況示している。調整制御システム60は、データベース44、制御装置43及び信号再生・入力器(46,47)をLAN接続して情報伝達容量の向上を図っている。本実施形態では、独立した計測器による信号再生・収集器(46,47)を用いることにより、処理分散が可能となり、工場内にて自由な配置が可能であるだけでなく、制御装置43の処理能力に影響されることがない。また、本実施形態に係る軸受摩耗監視装置(Eモニタ30)では、キャンドモータポンプの製造時における検出コイルの調整データが重要となり、キャンドモータポンプに関する様々な情報を保持することのできるEモニタ30との組み合わせにより、更なる品質向上機能を組み込むことが可能である。
【0060】
以上、上述したように、本実施形態に係る軸受摩耗監視装置及び軸受摩耗監視装置の調整方法を使用することで、軸受け交換と軸受摩耗監視装置との交換を分離して行うことが可能である。また、調整制御システムを使用することで、特定のキャンドモータポンプに適合する軸受摩耗監視装置を工場にて製造した後、現地では故障した軸受摩耗監視装置を交換するだけで調整作業を含めて終了させることが可能になり、作業工数の低減と迅速な交換作業が可能となる。なお、本実施形態では、記録済み信号の効果的な管理を実現するため、ロギング記録、基準波形、ゲイン係数及び疑似波形などを用いたが、このような実施形態に限定するものではなく、さらに効果的な管理方法を採用してもよい。また、本実施形態の図1において信号収集・信号発生器42を使用しているが、データベース44に基準波形及び係数が記録されている場合には、信号収集機能を省略して信号発生器の単機能で構築できることはいうまでもない。
【符号の説明】
【0061】
10 軸受摩耗監視装置、11 受入手段、12 フィルタ、13 整流回路、14 積分回路、15 減算器、16 A/D変換器、20 制御部、24 信号変換手段、25 中心位置調整手段、26 摩耗量変換手段、27 通信手段、28 送信素子、29 受信素子、30 モニタ、31 表示器、40 調整制御システム、41 赤外線通信器、42 信号収集・信号発生器、43 制御装置、44 データベース、45 ユーザインターフェース、46,47 信号再生・収集器、50 キャンドモータポンプ、52 ポンプ部、53 モータ部、54 アダプタ、55 インペラ、56 ポンプ室、57 吸引管部、58 吐出管部、59 シャフト、60 調整制御システム、61 鉄心歯部、64,65 スラストワッシャ、66 ロータ、67 ステータ、68 ターミナル端子、69 スタンド、71 端子箱、72 モータ巻線、73 ステータコイル端子、74 検出コイル端子、75 シャフトスリーブ、76 信号線、77 電源ケーブル、81 ガラス密封端子板、82 電線挿通孔、83 プリント基板、84 トランス、85 表示板、86 ガラス窓、87 筐体、88 プローブ、C1-C8 検出コイル。
【技術分野】
【0001】
本発明は、キャンドモータにおける回転子の長手方向端部の変位および半径方向の変位を、固定子の長手方向両側にそれぞれ設置された検出コイルによって検出し、軸受における軸方向および半径方向の摩耗を監視するためにモータに取り付けられた軸受摩耗監視装置を調整する調整制御システム、軸受摩耗監視装置の調整方法及び軸受摩耗監視装置に関する。
【背景技術】
【0002】
従来から、モータとポンプとを一体とし、軸受け部、ロータ(回転子)及びインペラを取扱液中に収容してキャンの外側にステータを設置したキャンドモータポンプが知られている。モータは内側から、取扱液と接するキャン(ステータライナ)と、モータ端子が取り付けられたターミナルフランジのターミナルプレート及びステータの外周を覆うステータバンドと、による2重構造を有している。取扱液は、インペラで昇圧され吐出側へ送られると共に、その一部がモータ側に送られ、軸受けの潤滑、モータの冷却を行い、シャフトに設けられた貫通孔を通じて吸込側に戻る。
【0003】
キャンドモータポンプは液が外部に漏れることがなく、静粛性に優れたポンプとして、高い信頼性が要求されるプラントに使用されている。しかし、キャンドモータの軸受けは、取扱液による流体潤滑軸受けであり、外部から軸受けの状態を全く見ることができないため、軸受けの摩耗を監視する装置が不可欠なものとなっている。
【0004】
キャンドモータの軸受摩耗監視装置としては、特許文献1のキャンドモータの軸受摩耗監視装置がある。この軸受摩耗監視装置は、ステータの長手方向両端に設置された検出コイルにてロータの回転時に変化する磁界の変化を測定することで、ロータが半径方向に変位するようになった軸受けの摩耗監視や軸方向に変位又は傾斜状態に変位するように摩耗した軸受けの摩耗監視を行うものである。キャンドモータの使用状況にもよるが、一般的に、軸受けは摩耗により2年から3年周期で交換が必要である。電子部品で構成される回路基板は、軸受摩耗監視装置の検出コイル、ステータコイルと比べて寿命が短く、電子部品の劣化により5年から6年周期で回路基板の交換が必要となる。
【0005】
従来、軸受摩耗監視装置の中の回路基板を交換する際には、キャンドモータの軸の機械的な中心位置(メカニカルセンタ)と軸受摩耗監視装置で検出される磁界検出による中心位置(マグネットセンタ)とが一致するようなゼロ点調整を行う必要から、作業の効率化を考慮して軸受け自体も新しいものに交換する場合が多い。また、軸受摩耗監視装置はキャンドモータの回転による誘起電圧を検出するため、当該ゼロ点調整はモータを回転させながら調整を行う必要がある。
【0006】
特許文献2には、キャンドモータの軸受摩耗監視装置における軸方向ゼロ点調整方法が記載されている。特許文献2には、ロータとステータの軸方向の中心位置(メカニカルセンタ)を設定した後に、メカニカルセンタにおいて検出コイルの出力信号を同一レベルに調整することにより、軸受摩耗監視装置の軸方向ゼロ点であるマグネットセンタをメカニカルセンタに対応させる調整方法が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許3488578号
【特許文献2】特許3637553号
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、軸受け自体に問題がなく、軸受摩耗監視装置だけが故障した場合にも、軸受けの交換と軸受摩耗監視装置の交換が発生する場合がある。また、ステータ製造時の機械公差により軸受摩耗監視に使用する検出コイルの信号はキャンドモータ毎に特性が異なる。さらに、軸受摩耗監視装置の設定状態を新たな軸受摩耗監視装置に設定し、検出コイルの信号に合うように調整しても十分な精度を得ることができず、検出コイルの信号以外に軸受摩耗監視装置の入力回路の特性も影響する場合があることが本出願人の調査により明らかになった。特に、十分な調整機器がない現地では、調整作業を行うことは困難であることからキャンドモータポンプ全体を工場に送り、再調整をする必要があった。これは、軸受摩耗監視装置の入力回路の特性のばらつきと、キャンドモータポンプに設けられている流体潤滑による滑り軸受けを機能させるために取扱液中でキャンドモータを回す必要があることも関係している。
【0009】
そこで、本発明に係る調整制御システム、軸受摩耗監視装置の調整方法及び軸受摩耗監視装置は、軸受摩耗監視装置の交換の際に、キャンドモータポンプ全体をわざわざ工場に送り返さずに現地でも調整ができ、軸受け交換を必要としない調整制御システム、軸受摩耗監視装置の調整方法及び軸受摩耗監視装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
以上のような目的を達成するために、本発明に係る調整制御システムは、回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換手段と、信号変換手段からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整手段と、中心位置調整手段により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換手段と、を有し、モータ軸受けにおける軸方向の摩耗量を監視する軸受摩耗監視装置であって該軸受摩耗監視装置を調整する調整制御システムにおいて、軸受摩耗監視装置と通信する通信手段と、検出信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を軸受摩耗監視装置に出力する出力手段と、記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信手段により取得し、予め分かっている変位にて補正する補正手段と、を有し、軸受摩耗監視装置の信号変換手段は入力アンプを有し、入力アンプの特性を補正手段にて補正することを特徴とする。
【0011】
また、本発明に係る調整制御システムにおいて、信号変換手段の入力前段から検出コイルの検出信号を取り出して記録済み信号として記録する信号記録手段と、記録した記録済み信号をモータの識別ID毎に管理する管理手段と、を有することを特徴とする。このような機能は、特に、工場出荷時におけるモータ特性を管理する上で重要であり、さらに、検出コイルの検出信号を記録することで、軸受摩耗監視装置の調整が可能となる。
【0012】
また、本発明に係る調整制御システムにおいて、予め記録された各検出コイルの検出信号は、基準となる検出信号の振幅値を所望の信号レベルに可変する可変手段を経て出力されることを特徴とする。この機能を用いることにより、モータの生産台数の増加と共に増加する記録済み信号をモータの構造別に集約することで、増加割合を低減することができる。ここで、記録済み信号は、調整制御システムに記憶されている基準となる波形データである。各検出コイルの検出信号をロギング波形として収集してそのまま使用するのではなく、複数収集されたロギング波形から共通の特性を有する波形データを基準波形として記録し、ロギング波形と同等の特性となる擬似波形を可変手段が出力する。記憶容量の圧縮のためである。
【0013】
本発明に係る軸受摩耗監視装置の調整方法は、回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、モータ軸受けにおける軸方向および半径方向の摩耗を監視する軸受摩耗監視装置を調整する調整方法において、各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換工程と、信号変換工程からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整工程と、中心位置調整工程により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換工程と、各検出コイルの出力信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を軸受摩耗監視装置に出力する出力工程と、調整制御システムの制御装置と通信を行う通信工程と、記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信工程により取得し、予め分かっている変位にて補正する補正工程と、を含み、信号変換工程は、整流回路と積分回路により合成信号を直流信号に変換する入力フィルタを有し、入力フィルタを補正工程にて補正することを特徴とする。
【0014】
また、本発明に係る軸受摩耗監視装置の調整方法において、信号変換工程の入力全段から検出コイルの検出信号を取り出して記録済み信号として記録する信号記録工程と、記録した記録済み信号をモータの識別ID毎に管理する管理手段と、を含むことを特徴とする。
【0015】
本発明に係る軸受摩耗監視装置は、回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、モータ軸受けにおける軸方向の摩耗を監視する軸受摩耗監視装置において、各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換手段と、信号変換手段からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整手段と、中心位置調整手段により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換手段と、摩耗量を表示する表示手段と、各検出コイルの出力信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を調整制御システムから受け入れる受入手段と、調整制御システムの制御装置と通信を行う通信手段と、を有し、さらに、信号変換手段は、整流回路と積分回路により合成信号を直流信号に変換する入力フィルタを有し、調整制御システムは、記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信手段により取得し、予め分かっている変位にて入力フィルタの補正を行う補正手段と軸受摩耗監視装置の中心位置調整手段とを実行し、摩耗量変換手段を調整することを特徴とする。
【0016】
また、本発明に係る軸受摩耗監視装置において、信号変換手段の入力前段から検出コイルの出力信号を取り出して調整制御システムに記録させる信号記録手段を有することを特徴とする。この信号記録手段は、単なるコネクタによるケーブルの差し替え手段にて実現しても良いが、好適にはバッファ回路を介して検出コイルの出力信号に影響を与えにくい構成が望ましい。
【発明の効果】
【0017】
本発明に係る調整制御システム及び軸受摩耗監視装置の調整方法を使用することで、モータ(キャンドモータ)に取り付けられている軸受摩耗監視装置の交換の際に、わざわざキャンドモータポンプ全体を工場に送り返さずに現地でも調整ができ、キャンドモータの軸受け交換を省略することができるという効果がある。また、本発明に係る調整制御システムを使用することで、特定のキャンドモータに適合する軸受摩耗監視装置を工場にて製造した後、検出コイルの検出信号を記録することで、現地では予め記録した検出信号を用いて故障した軸受摩耗監視装置と新しい軸受摩耗監視装置とを交換するだけで調整作業を含めて終了させることが可能になるという効果がある。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係る軸受摩耗監視装置を調整する調整制御システムの構成図である。
【図2】本発明の実施形態に係る軸受摩耗監視装置の構成を示す構成図である。
【図3】本実施形態に係る軸受摩耗監視装置を搭載したキャンドモータポンプの概要図である。
【図4】図3のキャンドモータの縦断面における検出コイルの設置状況とロータの移動方向を説明する説明図である。
【図5】図4のステータに配置した複数の検出コイルと検出コイルの拡大図である。
【図6】図3のキャンドモータの端子箱を固定しているボルトをはずして軸受摩耗監視装置と調整制御システムとを電気的に接続した状態を説明する説明図である。
【図7】本実施形態に係る軸受摩耗監視装置の概要特性を説明する説明図である。
【図8】図7の調整制御システムにおける概要特性の一例を説明する説明図である。
【図9】本実施形態における中心位置調整時の検出コイルの出力電圧特性を説明する説明図である。
【図10】本実施形態における中心位置調整時の検出コイルの出力電圧特性を説明する説明図である。
【図11】本実施形態に係る軸受摩耗監視装置の調整処理の流れを示すフローチャート図である。
【図12】本実施形態に係る基準波形の準備処理の流れを示すフローチャート図である。
【図13】本実施形態に係るラジアル調整の処理の流れを示すフローチャート図である。
【図14】本実施形態に係るスラスト調整の処理の流れを示すフローチャート図である。
【図15】図14のスラスト調整の処理の流れにおけるフロント、センタ、リアの特性図である。
【図16】図14にて算出した特性図に基づくLED表示の一例を説明する説明図である。
【図17】本実施形態に係る軸受摩耗監視装置で求めたVrms値の表である。
【図18】軸受摩耗監視装置を調整する調整制御システムの変形例である。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための最良の形態(以下実施形態という)を、図面に従って説明する。
【0020】
図1は軸受摩耗監視装置10を調整する調整制御システム40の構成を示し、図1を用いて調整制御システム40を概説する。なお、本出願人は軸受摩耗監視装置10を「日機装Eモニタ」(登録商標)と呼んでいることから、本明細書では軸受摩耗監視装置10の表示部をEモニタと呼ぶ。通常、軸受摩耗監視装置10はキャンドモータに取り付けられた複数の検出コイルに接続され、検出コイルによって検出される信号に基づいて軸受けの摩耗量を算出し、表示部であるEモニタ30に摩耗量を表示する。Eモニタ30には、摩耗量を表示するためLEDのバー表示と赤外線通信のための送信素子28と受信素子29が取り付けてある。
【0021】
調整制御システム40は、Eモニタ30の赤外線通信を利用して軸受摩耗監視装置とデジタル通信する機能と、キャンドモータに取り付けられている複数の検出コイルからの信号を取り込むロギング記録と、一時的にロギング記録された複数の波形から基準波形を決定すると共に、基準波形を記録済み信号として記憶し、記録済み信号をロギング記録と等価な擬似波形として再生する機能と、を有している。ここで、基準波形は新しい設計のキャンドモータが完成した時に記録された波形であり、調整制御システム40は、同じ型式のキャンドモータにおける工場出荷時のロギング記録をその基準波形に基づいてゲインやオフセットなどの調整データを求める。擬似波形は、基準波形と工場出荷時に記憶された調整データに基づいて調整することにより、工場出荷時の波形と等価な波形となる。調整制御システム40は、記録済み信号から作成した擬似波形を軸受摩耗監視装置10に出力することにより、キャンドモータを作動させることなく軸受けの摩耗状態を模擬させることができる。
【0022】
このような機能を実現させるため、調整制御システム40は、軸受摩耗監視装置10の調整に必要な記録済み信号である基準波形や各種情報を記憶するデータベース44と、検出コイルからの信号を記録する、又は、軸受摩耗監視装置10に基準波形から作成した擬似波形を出力する信号収集・信号発生器42と、擬似波形による変位を軸受摩耗監視装置から取得し、予め分かっている変位にて補正する補正手段と、軸受摩耗監視装置10のEモニタ30とデジタル通信を行う赤外線通信器41と、これらの機器を制御する制御装置43と、制御装置43を操作するユーザインターフェース45と、を有している。ここで、データベース44は調整データと基準波形の波形データを記録しており、調整データに記録されているのは調整時の調整パラメータ、調整時の各コイルの数値データ等である。なお、これら数値データは、電圧計等の機能を用いた測定値でも良い。
【0023】
Eモニタ30は、キャンドモータの軸方向であるスラスト方向の摩耗を表示すると共に、半径方向であるラジアル方向の摩耗を表示するための表示器である。表示器は、バー表示を構成する3つの緑灯、1つの黄灯及び1つの赤灯を有し、バー表示の近傍には、調整制御システム40の赤外線通信器41とデジタル通信するための送信素子28及び受信素子29と、を備えている。
【0024】
よって、調整制御システム40は、データベース44から基準波形を入手し、信号収集・信号発生器42により基準波形から擬似波形を作成して軸受摩耗監視装置10へ出力し、Eモニタ30に表示された情報や内部情報を赤外線によるデジタル通信によって入手することで、様々な状況を再現すると共に、軸受摩耗監視装置10の動作を評価することができる。次に、軸受摩耗監視装置について詳説する。
【0025】
図2は軸受摩耗監視装置10の構成を示している。軸受摩耗監視装置10は、軸受けのスラスト方向(軸方向)の摩耗を検出する検出コイルC2,C4,C6,C8及びラジアル方向(半径方向)の摩耗を検出する検出コイルC1,C3,C5,C7と、当該検出コイルで検出した検出信号から所望の信号を分離するためのアンプ群であって、フィルタ12,整流回路13及び積分回路14にて直流信号に変換する信号変換手段24と、信号変換された直流信号のゲインとオフセットを調整する中心位置調整手段25と、調整された信号を摩耗量に変換する摩耗量変換手段26と、算出した摩耗量を表示するLED表示器31と、制御装置と通信するための通信手段27と、検出コイルで検出した交流信号の替わりに、検出コイルの交流信号である基準波形や擬似波形などを受け入れる受入手段11と、を有している。
【0026】
軸受摩耗監視装置10は、大きく分けて3つの構成を有している。第1の構成は、軸受けのスラスト方向及びラジアル方向の摩耗を検出するため、ステータに取り付けられた検出コイルC1〜C8である。第2の構成は、Eモニタ30の基板に配置されたフィルタ12,整流回路13,積分回路14及び減算器15などのアナログ回路である。第3の構成は、Eモニタ30の基板に配置され、制御部20を形成するCPU21,RAM21,ROM23及びA/D変換器16などのデジタル回路と、赤外線による送信素子28と受信素子29及びLED表示器31とのインターフェース回路である。次に、信号の流れと共に機能を説明する。
【0027】
スラスト方向の検出コイルC2,C4,C6,C8(スラスト検出)とラジアル方向の検出コイルC1,C3,C5,C7(ラジアル検出)が検出した信号は、所定の組み合わせにより合成され合成信号として受入手段11を介してEモニタ30に入力される。受入手段11は、Eモニタ30が検出コイルC1〜C8からの信号を受け入れることが可能であると共に、キャンドモータポンプに取り付けられている検出コイルC1〜C8の信号を記録する調整制御システムに出力することが可能であり、さらに、調整制御システムに記録された検出コイルC1〜C8のロギング記録を受け入れることが可能である。本実施形態における受入手段11は、コネクタのつなぎ替えにて実現しているが、Eモニタ30にバッファ回路と切換え回路を設けることでコネクタのつなぎ替えを省く構成にしてもよい。
【0028】
検出コイルC1〜C8が検出した信号は、モータの主磁束変化(基本波成分)とロータに設けられたロータバーの磁束変化(基本波成分よりも周波数の高い高調波成分)を含んでいる。このため、本実施形態では検出コイルC1〜C8の信号をフィルタ12に入力して基本波成分と安定した高調波成分を取り出すことにした。フィルタ12によって取り出された基本波成分などは、整流回路13にて整流され、後段の積分回路14にて直流に変換される。
【0029】
次に、ラジアル検出について概説する。図2の左側下段のラジアル検出において、Eモニタ30は、制御部20のA/D変換器16にて検出コイルC1,C3のアナログ信号をデジタル信号に変換する。ラジアル方向にロータが移動した場合には、Eモニタ30は高調波成分の差が増大することで判定することができる。また、検出コイルC1,C3及び検出コイルC5,C7は独立回路であるため、Eモニタ30は両者を比較して偏摩耗を検出することができる。
【0030】
次に、スラスト検出について概説する。図2の左側上段のスラスト検出において、Eモニタ30は、制御部20のA/D変換器16にて検出コイルC2,C4と検出コイルC6,C8のアナログ信号をデジタル信号に変換する。次に、2つのスラスト方向の信号における差分を減算器15によって求め、A/D変換器16にてデジタル信号に変換する。Eモニタ30は、スラスト方向にロータが移動した場合には、基本波成分の差分がほとんど無い状態から基本波波形の差分が増大し、これに応じて出力電圧が上昇することでスラスト方向の摩耗を検出することが可能となる。次に、キャンドモータポンプの構造について概説する。
【0031】
図3は軸受摩耗監視装置10を搭載したキャンドモータポンプ50の概要を示している。図3のキャンドモータポンプ50は、ポンプ部52とスタンド69に取り付けられたモータ部53とを有し、ポンプ部52とモータ部53は、アダプタ54により接続されている。ポンプ部52は、インペラ55を収容したポンプ室56内に連通する吸引管部57と吐出管部58を有し、インペラ55はモータ部53のシャフト59の延長端部に取り付けられている。シャフト59には、フロント・リア方向へのシャフト59の移動を制限するスラストワッシャ64,65が設けられている。また、吐出管部58から導入された取扱液の一部は、軸受け62,63の潤滑及びモータ部53の冷却を行い、その後、吸引管部57へ排出される。
【0032】
モータ部53は、ロータ66とステータ67を有し、ロータ66のシャフト59はフロント側の軸受け62とリア側の軸受け63に回転自在に支持されている。また、ステータ67は、モータ巻線72と、軸受けの摩耗によるロータの変位を検出するためステータ67の両端部に設けられた検出コイル(C1,C2)と、を有している。モータ巻線72はターミナル端子68を介してキャンドモータポンプ50の端部に設けられた端子箱71に接続され、端子箱71の上部には軸受の摩耗状態を監視してその内容を表示する軸受摩耗監視装置10とEモニタ30とが取り付けられている。
【0033】
図4は図3のキャンドモータポンプ50の縦断面における検出コイルC1,C3,C5,C7の設置状況とロータ66の移動方向を示している。ここで、すでに説明した構成については説明を割愛する。図4に示すように検出コイルC1,C3,C5,C7はステータ67の長手方向の両端部に180度の間隔を有して向かい合うように配置され、半径方向の変位を検出すると共に、いくつかの検出コイルを組み合わせる(合成する)ことにより図4の右側の拡大図に示したようにフロント・リア方向の変位が検出可能である。検出コイルは軸受の摩耗を直接検出するものではなく、例えば、図4の左側の拡大図に示したようにシャフト59に設けられた軸受け63とスラストワッシャ65との間隔(L1)が摩耗によって広がったことをステータ67に取り付けられた検出コイルによってスラスト方向の変位を検出するものである。同様に、検出コイルは、シャフトスリーブ75と軸受け63との間隔(L2)が摩耗によって広がることによるラジアル方向の変位を検出する。
【0034】
図5は図4のステータ67に配置した複数の検出コイルC1〜C8と所定の検出コイルC3の拡大図を示している。図に示すように検出コイルC1とC3によりフロント側のラジアル方向(半径方向)の変位を検出することができ、同様に検出コイルC5とC7によりリア側のラジアル方向の変位を検出することができる。また、フロント・リア方向のスラスト方向の変位は検出コイルC4,C2と検出コイルC8,C6との組み合わせによってスラスト方向(軸方向)の変位を検出することが可能となる。なお、検出コイルC3は扁平なボビン形状であり、図5の拡大図に示すようにステータ67端部の鉄心歯部61に設けられた切り欠きにはめ込まれている。
【0035】
本実施形態のキャンドモータポンプのシャフトには、軸横スラスト方向に約±1mm遊びを持たせている。そこで、制御部20は、センタ、フロント、リアの3種類の位置情報を通信手段27により外部制御器から受け入れ、各検出コイルC1〜C8の信号に基づいて中心位置調整手段25を実行することで、メカニカルセンタとマグネットセンタとを一致させることが可能となる。その後、制御部20は、中心位置調整手段25により調整した信号に基づいてラジアル方向の摩耗とスラスト方向の摩耗を摩耗量変換手段26にて求め、各方向の摩耗をLED表示器31に表示する。
【0036】
図6は図3のキャンドモータの端子箱71を固定しているボルトをはずして軸受摩耗監視装置10と調整制御システム40とを電気的に接続した状態を示している。図6は大きく分けて3つで構成されている。第1はキャンドモータのターミナル端子68を収容する端子箱71であり、第2は端子箱71の上にボルトによって取り付けられている筐体87であり、第3は筐体87の上に取り付けられている赤外線通信器41及び制御装置43である。筐体87には、トランス84及び複数のプリント基板83で構成された軸受摩耗監視装置10が収容され、筐体の上部のガラス窓86から表示板85を見ることができる。表示板85には摩耗状態を表示するためのLED表示器31、調整制御システム40と通信をするための送信素子28、受信素子29が取り付けられている。
【0037】
ターミナル端子68にはステータコイル端子73と検出コイル端子74がガラス密封端子板81に取り付けられており、ステータコイル端子73に電源ケーブル77が接続されている。さらに、電源ケーブル77は電線挿通孔82を通して端子箱71の外に伸びている。一方、検出コイル端子74から伸びる信号線76は軸受摩耗監視装置10のプリント基板83に接続されている。また、検出コイル端子74には、検出コイルの信号を記録するためのプローブ88が接続されている。プローブ88は信号を効率よく収集するためにハイインピーダンス回路を内蔵している。
【0038】
図7は軸受摩耗監視装置の概要特性を示し、調整制御システムによって入力された信号に対する出力を示している。調整制御システムは、軸受摩耗監視装置の受入手段によりフロント、センタ、リア位置の各スラスト位置における検出コイルの検出信号(交流信号)をロギング記録として取得し、調整制御システムは、これらのロギング記録の中から標準的な波形を基準波形となる検出コイル信号ファイルとしてデータベースに記録する。検出コイル信号ファイルには、スラスト位置、検出コイルによって検出された回転による磁界の信号波形が記録されている。この検出コイル信号ファイルは、モータの特性のばらつきにより出力レベルは変化するが、キャンドモータの形式や種類が同一であれば、所定のばらつきに収まることが経験的に知られている。そこで、本実施形態では、基準波形となる検出コイル信号ファイルを作成し、ロギング記録とのゲインの差異を測定して「基準波形」と「ゲイン係数」を組み合わせることにした。この組み合わせにより、キャンドモータ毎のセンタ位置、フロント位置、リア位置などの記録波形をキャンドモータ毎管理する替わりに、データ量が少なくなるように「基準波形」と「調整データ」を管理する。本実施形態では、キャンドモータの形式や種類毎に「基準波形」となるセンタ位置、フロント位置、リア位置の記録波形を元にしてロギング記録とのゲインの差異を示す「ゲイン係数」を適用することにより基準波形から擬似波形を作成し、ロギング記録のような検出コイル信号ファイルの増大によるデータベース44の肥大化を防止している。
【0039】
調整制御システムによって調整する要素は、軸受摩耗監視装置のアンプ特性である。検出コイル信号ファイルに記録された検出コイル特性は、スラスト位置(横軸)に対する検出コイル出力(縦軸)であり、アンプ特性を補正するために検出コイル出力(横軸)に対するアンプ出力(縦軸)を調整制御システムが作成し、軸受摩耗監視装置へ補正情報として書き込み、軸受摩耗監視装置はこの補正情報に基づいてスラスト位置を出力することができる。
【0040】
本実施形態の軸受摩耗監視装置では、信号変換手段において検出コイルによって検出された基本波成分と高調波成分を直流のrms値に変換してA/D変換することで回路のコストダウンを実現している。軸受摩耗監視装置の信号変換手段にはアナログ回路や複数のオペアンプを使用していることから、これらのアンプ特性により装置毎に特性が若干異なる。さらに、検出コイルの検出信号にも検出コイル毎に特性が異なることから、検出コイルの特性の補正と装置毎のアンプ特性の補正をする必要がある。
【0041】
図8は図7の軸受摩耗監視装置の概要特性の一例を示し、検出コイルの特性におけるスラスト位置と検出コイルの出力に相当するスラスト位置及び、検出コイルとアンプ特性の複合特性を実線で示し、補正後のスラスト位置特性を破線で示している。この図に示すように、検出コイル特定とアンプ特性の複合特性が影響することから、正確なスラスト位置特性を得る為には、検出コイルの特性とEモニタのアンプ特性とを考慮して補正する必要がある。
【0042】
一般的に、軸受摩耗監視装置を交換する際には、キャンドモータが機械的な中心位置(メカニカルセンタ)に来るように軸受けを新品に交換すると共に、機械的な中心位置と軸受摩耗監視装置で検出される磁界検出による中心位置(マグネットセンタ)とが一致するようなゼロ点調整を行う必要がある。そこで、本発明に係る軸受摩耗監視装置では、新品の軸受けの遊びをメカニカルセンタから±50%とし、各検出コイルにて検出した交流信号を記録(ロギング記録)し、記録された交流信号(ロギング記録)を使用してマグネットセンタを補正することにした。このような方法を用いることにより、軸受摩耗監視装置の交換だけで済み、作業効率が向上する。
【0043】
図9と図10は中心位置調整時の検出コイル出力電圧特性を示している。以下、軸受摩耗監視装置の交換における基準波形を用いた中心位置調整について概説する。図9は中心位置調整前の検出コイル出力電圧の一例であり、実線は検出コイルC2,C4の出力を示し、破線は検出コイルC6,C8の出力を示し、Eモニタのアンプ特性と検出コイルの検出コイル特性との複合特性によりメカニカルセンタとマグネットセンタがずれている状態を示している。図9のようにメカニカルセンタとマグネットセンタがずれていると差分が調整可能な許容値を超えてしまうことから、メカニカルセンタとマグネットセンタを一致させるため、フロント、センタ、リアの各位置における基準波形を使用して中心位置調整を行う。図10は、後述する中心位置調整によりメカニカルセンタとマグネットセンタとを一致させた状態を示している。メカニカルセンタとマグネットセンタとを一致させることにより、差分が調整可能な範囲となり、摩耗監視の精度を保つことが可能となる。なお、中心位置調整は、軸受摩耗監視装置の調整処理の一部であり、調整処理は中心位置調整の他に、ゲインの設定、しきい値の調整などを含む。次に、調整処理の流れについて詳説する。
【0044】
図11は軸受摩耗監視装置の調整処理の流れ(メインルーチン)を示し、図1の調整制御システムの処理について示している。図11に示すように調整処理は、調整データや波形等の読出(S10)、センタ位置の波形使用(S12)、センタ位置におけるラジアル調整(S14)、フロント,センタ,リア位置の波形使用(S16)、フロント,センタ,リア位置におけるスラスト調整(S18)、検証試験(S20)及びメモリ格納(S22)の流れになる。図1のデータベース44は、調整データと波形データを記録するキャンドモータの製造からメンテナンス全般に関するデータベースであり、キャンドモータの型式、作動電圧、ポンプリフト量、製造時におけるゲイン設定等の調整パラメータを記録している。以下、図10のメインルーチンと図11〜13のサブルーチンを用いて処理の流れを示す。
【0045】
図11の調整処理(メインルーチン)が開始すると、制御装置43はステップ10において、操作者から交換対象となっている軸受摩耗監視装置の個体(キャンドモータポンプ)を識別する製造番号を受け付ける。制御装置43が製造番号を受け付けると、製造番号に紐付けられた作業領域を確保する。次に、制御装置43はステップS11の波形データ読出しサブルーチンを実行する。この処理は図12に示すように、基準波形の準備処理のための波形読出し(サブルーチン)であり、製造番号に紐付けられた調整データを読み出し、調整データから基準波形を決定し、データベースへアクセスして該当ファイルがあるかどうかをステップS30で問い合わせる。該当ファイルがある場合には、ステップS32にてデータベースへアクセスを行い、ステップS36にて基準波形を読み出し、ステップS38にて基準波形をメモリに格納する。
【0046】
もし、ステップS30にて該当ファイルが見つからない場合には、通常仕様モータの該当ファイルが無いことを操作者に通知し、相当品の基準波形等を使用しても良いかを確認するためにステップS34の別メディアからの読込み処理を実行する。特別仕様モータの基準波形は通常仕様モータの基準波形と異なることから、自動でデータをダウンロードさせず、必要に応じて操作者自身が別メディアからダウンロードを行う。
【0047】
格納された基準波形は、1つの波形ではなく、中心位置調整に必要な複数の波形が所定のwfsフォーマットにて記述されている。wfsフォーマットは、ポンプ運転時に流体的に平衡する位置のフロント検出コイルとリア検出コイルの波形データなどの複数のフィールドを有している。制御装置43は基準波形をメモリに格納し、ステップS38を終了すると、図11のメインルーチンのステップS11へ戻り、ステップS12へ移る。
【0048】
図11のステップS12は、センタ位置の基準波形を使用してラジアル調整を行うための波形読み出しに関する確認処理である。なお、wfsフォーマットによるファイル名は、モータ枠、電圧、周波数及び中心位置調整に必要な情報を組み合わせて作成している。使用するファイルの確認を行った後、ステップS14のラジアル調整(サブルーチン)に移る。
【0049】
図13はラジアル調整のサブルーチンの流れを示している。ステップS40は擬似波形生成処理である。擬似波形は、基準波形にゲイン係数をかけたものであり、ゲイン係数は次の式で示される。ゲイン波形は、ゲイン係数=調整データの検出コイル出力電圧/基準波形の検出コイル電圧・・(式1)である。このことから、擬似波形は、擬似波形=ゲイン係数*基準波形・・(式2)であり、基準波形を実際の検出コイルの出力電圧に近づけた波形である。
【0050】
図17は軸受摩耗監視装置で求めたリア、センタ、フロント位置におけるスラスト方向及びラジアル方向のリアコイルとフロントコイルとの電圧値(ロギング記録)を示している。例えば、図17のセンタ位置、ラジアル方向のリアコイルにおけるロギング記録の検出コイル出力電圧が0.04Vrmsであり、基準波形の検出コイル電圧が0.02Vrmsの場合、ゲイン係数は式1から0.04/0.02=2.0となる。従って、疑似波形は2.0*基準波形からロギング記録と同じ波形を生成することが可能となる。つまり、基準波形とゲイン係数(2.0)を算出するだけで、キャンドモータ毎の膨大なロギング記録を管理する必要がなくなり記憶容量の削減ができる。言い換えると、標準的な基準波形を記憶すると共に、キャンドモータ毎の調整データだけ記憶することで、ロギング記録に近い擬似波形を作り出すことができる。
【0051】
図13のステップS40にて擬似波形生成が終了すると、図1の信号収集・信号発生器42からEモニタ30へ擬似波形が出力される(ステップS42)。Eモニタ30は、取得した擬似波形からrms値を算出する(ステップS44)。Eモニタ30はステップS46にて赤外線通信器41によるデジタル通信で受信したセンタ位置情報と共にrms値をメモリに格納した後(ステップS46)、サブルーチンを終了して図11のステップS14に戻り、ステップS16に移る。
【0052】
図11のステップS16は、スラスト調整のためのフロント、センタ、リア位置のロギング記録に相当する基準波形を使用してラジアル調整を行うための波形読み出しに関する確認処理である。この確認処理は、上述したステップS12と同様にデータベースから必要な波形を読み出すための処理である。ステップ16の確認処理が終わると、ステップS18のスラスト調整(サブルーチン)に移る。
【0053】
図14はスラスト調整(サブルーチン)の流れにおけるフロント、センタ、リア位置調整の処理の流れを示している。上述したラジアル調整(サブルーチン)では、フロント、リア位置での検出コイル電圧の差異がほとんど無いため、図16に示したセンタ位置の擬似波形により処理を行ったが、スラスト調整サブルーチンでは、フロント、センタ、リア位置でrms値を含めて所定の数値範囲に収まるかどうかを検証する点が異なる。以下、図13のステップS50〜ステップS60について詳説する。
【0054】
図14のスラスト調整サブルーチンのステップS50において、図1の制御装置43は、フロント、センタ、リア位置それぞれの擬似波形を生成するためにゲイン係数を基準波形に適用して擬似波形を生成する。ここで、ゲイン係数はwfsフォーマットの値を用いることになるが、ゲイン係数の算出方法について説明する。
【0055】
図17の表(スラスト方向のフロント位置)において、例えば、基準波形の検出コイル電圧rmsが0.9Vrmsであるので、リアコイルのゲイン係数は0.97/0.9=1.07となる。また、フロントコイルのゲイン係数は0.92/0.9=1.02となる。制御装置43はこれらのゲイン係数を用いてリア側とフロント側の基準波形から擬似波形を生成する。次に、制御装置43はステップS52において、生成した擬似波形を信号収集・信号発生器42からEモニタ30へ出力してステップS54に移る。Eモニタ30はステップS54において、擬似波形からリアコイルrms−フロントコイルrms値を算出して赤外線通信器のデジタル通信により制御装置43に送信する。制御装置43は、各rms値を受信してステップS56を実行する。
【0056】
ステップS56において、フロント、センタ、リア位置における各rms値は、新品の軸受けによる遊びであるので、この距離を摩耗時の移動距離の50%と設定し、制御装置43は100%摩耗時のrms値を算出する。ここで、図15は図14のスラスト調整の処理の流れにおけるフロント、センタ、リアの特性を示し、図17で示したrms値をフロント、センタ、リア位置に表示している。図15のフロント及びリア位置での許容誤差範囲は±5%以内とし、センタ位置での許容誤差範囲は±3%以内に収まるようにしている。これは、この値を元に、100%摩耗時のrms値を算出することから、上記許容誤差を超えると正確な摩耗監視が困難だからである。また、図15のフロント側のrms値は表示上極性を逆にして表示している。この理由は、表示グラフ面積を縮小するものであり、ユーザインターフェース上にグラフを表示する際の省スペース化を実現するものである。
【0057】
図16は図15にて算出した特性図に基づくEモニタ30におけるLED表示の一例を示している。図14のステップS56では、移動距離が50%の位置におけるrms値を元に100%摩耗時のrms値を算出している。通常、移動距離が50%以内であれば緑1灯は常時点灯する。以下、緑2灯から赤1灯までの点灯条件について示す。緑2灯は移動距離が50%を超え67%以下となった時に点灯し、緑3灯は移動距離が67%を超え88%以下となった時に点灯し、黄1灯は移動距離が88%を超え100%以下となった時に点灯し、赤1灯は移動距離が100%を超えると点灯する。このように、点灯条件が移動距離に相当するrms値で得られることから、制御装置43は図14のステップS58において、赤外線通信により各rms値をEモニタのメモリに格納する。制御装置43はステップS60において、以上の処理をフロント、センタ、リアの各位置で実行し、終了するまで繰り返す。各処理が終了した場合には、ステップS60を終了し、図11のステップS20のステップS18に戻り、ステップS20の検証サブルーチンに移る。
【0058】
図11のステップS20では、一連の設定処理が終了したことを制御装置43が操作者に通知し、Eモニタ30のLED表示を順番に点灯させるための擬似信号をEモニタ30に出力して検証試験を実行する。この検証試験により、Eモニタ30の設定が正常に実行できたか否かを容易に判断することが可能となる。制御装置43はステップS20の検証試験が終了した後、ステップS22に移動し、設定した情報をEモニタ30に格納すると共に、制御装置43からデータベース44に必要な情報の格納を行う。以上の処理にてメインルーチンの処理が終了する。
【0059】
図18は図1の軸受摩耗監視装置(Eモニタ30)を調整する調整制御システムの変形例を示し、ネットワーク化された工場内での生産ラインの状況示している。調整制御システム60は、データベース44、制御装置43及び信号再生・入力器(46,47)をLAN接続して情報伝達容量の向上を図っている。本実施形態では、独立した計測器による信号再生・収集器(46,47)を用いることにより、処理分散が可能となり、工場内にて自由な配置が可能であるだけでなく、制御装置43の処理能力に影響されることがない。また、本実施形態に係る軸受摩耗監視装置(Eモニタ30)では、キャンドモータポンプの製造時における検出コイルの調整データが重要となり、キャンドモータポンプに関する様々な情報を保持することのできるEモニタ30との組み合わせにより、更なる品質向上機能を組み込むことが可能である。
【0060】
以上、上述したように、本実施形態に係る軸受摩耗監視装置及び軸受摩耗監視装置の調整方法を使用することで、軸受け交換と軸受摩耗監視装置との交換を分離して行うことが可能である。また、調整制御システムを使用することで、特定のキャンドモータポンプに適合する軸受摩耗監視装置を工場にて製造した後、現地では故障した軸受摩耗監視装置を交換するだけで調整作業を含めて終了させることが可能になり、作業工数の低減と迅速な交換作業が可能となる。なお、本実施形態では、記録済み信号の効果的な管理を実現するため、ロギング記録、基準波形、ゲイン係数及び疑似波形などを用いたが、このような実施形態に限定するものではなく、さらに効果的な管理方法を採用してもよい。また、本実施形態の図1において信号収集・信号発生器42を使用しているが、データベース44に基準波形及び係数が記録されている場合には、信号収集機能を省略して信号発生器の単機能で構築できることはいうまでもない。
【符号の説明】
【0061】
10 軸受摩耗監視装置、11 受入手段、12 フィルタ、13 整流回路、14 積分回路、15 減算器、16 A/D変換器、20 制御部、24 信号変換手段、25 中心位置調整手段、26 摩耗量変換手段、27 通信手段、28 送信素子、29 受信素子、30 モニタ、31 表示器、40 調整制御システム、41 赤外線通信器、42 信号収集・信号発生器、43 制御装置、44 データベース、45 ユーザインターフェース、46,47 信号再生・収集器、50 キャンドモータポンプ、52 ポンプ部、53 モータ部、54 アダプタ、55 インペラ、56 ポンプ室、57 吸引管部、58 吐出管部、59 シャフト、60 調整制御システム、61 鉄心歯部、64,65 スラストワッシャ、66 ロータ、67 ステータ、68 ターミナル端子、69 スタンド、71 端子箱、72 モータ巻線、73 ステータコイル端子、74 検出コイル端子、75 シャフトスリーブ、76 信号線、77 電源ケーブル、81 ガラス密封端子板、82 電線挿通孔、83 プリント基板、84 トランス、85 表示板、86 ガラス窓、87 筐体、88 プローブ、C1-C8 検出コイル。
【特許請求の範囲】
【請求項1】
回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換手段と、信号変換手段からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整手段と、中心位置調整手段により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換手段と、を有し、モータ軸受けにおける軸方向の摩耗量を監視する軸受摩耗監視装置であって該軸受摩耗監視装置を調整する調整制御システムにおいて、
軸受摩耗監視装置と通信する通信手段と、
検出信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を軸受摩耗監視装置に出力する出力手段と、
記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信手段により取得し、予め分かっている変位にて補正する補正手段と、
を有し、
軸受摩耗監視装置の信号変換手段は入力アンプを有し、
入力アンプの特性を補正手段にて補正することを特徴とする調整制御システム。
【請求項2】
請求項1に記載の調整制御システムにおいて、さらに、
信号変換手段の入力前段から検出コイルの検出信号を取り出して記録済み信号として記録する信号記録手段と、
記録した記録済み信号をモータの識別ID毎に管理する管理手段と、
を有することを特徴とする調整制御システム。
【請求項3】
請求項1に記載の調整制御システムにおいて、
予め記録された各検出コイルの検出信号は、基準となる検出信号の振幅値を所望の信号レベルに可変する可変手段を経て出力されることを特徴とする調整制御システム。
【請求項4】
回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、モータ軸受けにおける軸方向の摩耗を監視する軸受摩耗監視装置を調整する調整方法において、
各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換工程と、
信号変換工程からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整工程と、
中心位置調整工程により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換工程と、
各検出コイルの出力信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を軸受摩耗監視装置に出力する出力工程と、
調整制御システムの制御装置と通信を行う通信工程と、
記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信工程により取得し、予め分かっている変位にて補正する補正工程と、
を含み、
信号変換工程は、整流回路と積分回路により合成信号を直流信号に変換する入力フィルタを有し、
入力フィルタを補正工程にて補正することを特徴とする軸受摩耗監視装置の調整方法。
【請求項5】
請求項4に記載の軸受摩耗監視装置の調整方法において、さらに、
信号変換工程の入力全段から検出コイルの検出信号を取り出して記録済み信号として記録する信号記録工程と、
記録した記録済み信号をモータの識別ID毎に管理する管理手段と、
を含むことを特徴とする軸受摩耗監視装置の調整方法。
【請求項6】
回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、モータ軸受けにおける軸方向の摩耗を監視する軸受摩耗監視装置において、
各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換手段と、
信号変換手段からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整手段と、
中心位置調整手段により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換手段と、
摩耗量を表示する表示手段と、
各検出コイルの出力信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を調整制御システムから受け入れる受入手段と、
調整制御システムの制御装置と通信を行う通信手段と、
を有し、
さらに、信号変換手段は、整流回路と積分回路により合成信号を直流信号に変換する入力フィルタを有し、
調整制御システムは、記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信手段により取得し、予め分かっている変位にて入力フィルタの補正を行う補正手段と軸受摩耗監視装置の中心位置調整手段とを実行し、摩耗量変換手段を調整することを特徴とする軸受摩耗監視装置。
【請求項7】
請求項6に記載の軸受摩耗監視装置において、さらに、
信号変換手段の入力前段から検出コイルの出力信号を取り出して調整制御システムに記録させる信号記録手段を有することを特徴とする軸受摩耗監視装置。
【請求項1】
回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換手段と、信号変換手段からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整手段と、中心位置調整手段により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換手段と、を有し、モータ軸受けにおける軸方向の摩耗量を監視する軸受摩耗監視装置であって該軸受摩耗監視装置を調整する調整制御システムにおいて、
軸受摩耗監視装置と通信する通信手段と、
検出信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を軸受摩耗監視装置に出力する出力手段と、
記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信手段により取得し、予め分かっている変位にて補正する補正手段と、
を有し、
軸受摩耗監視装置の信号変換手段は入力アンプを有し、
入力アンプの特性を補正手段にて補正することを特徴とする調整制御システム。
【請求項2】
請求項1に記載の調整制御システムにおいて、さらに、
信号変換手段の入力前段から検出コイルの検出信号を取り出して記録済み信号として記録する信号記録手段と、
記録した記録済み信号をモータの識別ID毎に管理する管理手段と、
を有することを特徴とする調整制御システム。
【請求項3】
請求項1に記載の調整制御システムにおいて、
予め記録された各検出コイルの検出信号は、基準となる検出信号の振幅値を所望の信号レベルに可変する可変手段を経て出力されることを特徴とする調整制御システム。
【請求項4】
回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、モータ軸受けにおける軸方向の摩耗を監視する軸受摩耗監視装置を調整する調整方法において、
各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換工程と、
信号変換工程からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整工程と、
中心位置調整工程により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換工程と、
各検出コイルの出力信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を軸受摩耗監視装置に出力する出力工程と、
調整制御システムの制御装置と通信を行う通信工程と、
記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信工程により取得し、予め分かっている変位にて補正する補正工程と、
を含み、
信号変換工程は、整流回路と積分回路により合成信号を直流信号に変換する入力フィルタを有し、
入力フィルタを補正工程にて補正することを特徴とする軸受摩耗監視装置の調整方法。
【請求項5】
請求項4に記載の軸受摩耗監視装置の調整方法において、さらに、
信号変換工程の入力全段から検出コイルの検出信号を取り出して記録済み信号として記録する信号記録工程と、
記録した記録済み信号をモータの識別ID毎に管理する管理手段と、
を含むことを特徴とする軸受摩耗監視装置の調整方法。
【請求項6】
回転子の長手方向端部の変位を固定子の長手方向両側にそれぞれ設置された複数の検出コイルによって検出し、モータ軸受けにおける軸方向の摩耗を監視する軸受摩耗監視装置において、
各検出コイルにて検出した検出信号を組み合わせて合成信号に変換する信号変換手段と、
信号変換手段からの合成信号に基づいて軸方向のゼロ点を回転子と固定子との中心位置に対応するように調整する中心位置調整手段と、
中心位置調整手段により調整されたゼロ点からの変位を摩耗量に変換する摩耗量変換手段と、
摩耗量を表示する表示手段と、
各検出コイルの出力信号の替わりに、長手方向端部の変位が予め分かっている検出コイルの記録済み信号を調整制御システムから受け入れる受入手段と、
調整制御システムの制御装置と通信を行う通信手段と、
を有し、
さらに、信号変換手段は、整流回路と積分回路により合成信号を直流信号に変換する入力フィルタを有し、
調整制御システムは、記録済み信号による長手方向端部の変位を軸受摩耗監視装置から通信手段により取得し、予め分かっている変位にて入力フィルタの補正を行う補正手段と軸受摩耗監視装置の中心位置調整手段とを実行し、摩耗量変換手段を調整することを特徴とする軸受摩耗監視装置。
【請求項7】
請求項6に記載の軸受摩耗監視装置において、さらに、
信号変換手段の入力前段から検出コイルの出力信号を取り出して調整制御システムに記録させる信号記録手段を有することを特徴とする軸受摩耗監視装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】

【図10】

【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−78170(P2013−78170A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−215223(P2011−215223)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000226242)日機装株式会社 (383)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000226242)日機装株式会社 (383)
【Fターム(参考)】
[ Back to top ]