
調理器具、及び調理器具システム
【課題】食物の中心温度を計測することができる調理器具を提供する。
【解決手段】間隔を介して配置された複数の温度センサを有する温度検出部10により計測された温度は、A/D変換部12を介して制御部13に出力される。制御部13は、温度検出部10から取得する複数の温度センサによる温度分布に基づいて食物中心温度を算出する。制御部13は、算出した食物中心温度が所定温度に達してから所定時間経過したと判定すると、表示部15と報知部16とを介して、食中毒を防止する調理がなされたことを報知する。
【解決手段】間隔を介して配置された複数の温度センサを有する温度検出部10により計測された温度は、A/D変換部12を介して制御部13に出力される。制御部13は、温度検出部10から取得する複数の温度センサによる温度分布に基づいて食物中心温度を算出する。制御部13は、算出した食物中心温度が所定温度に達してから所定時間経過したと判定すると、表示部15と報知部16とを介して、食中毒を防止する調理がなされたことを報知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、計測対象物の温度を計測する調理器具及び調理器具システムに関する。
【背景技術】
【0002】
毎年、相次いで食中毒事件が発生している。食中毒事件は、高齢者や幼児等にとって命を落としかねない社会的問題であり、また、企業にとってもその存続を脅かす死活問題となっている。この食中毒防止の一手段として、従来、温度管理を必要とする計測対象物に対して温度計測装置を挿入して温度を計測することが行われている。
【0003】
温度計測装置としては、例えば、複数の温度センサが等間隔で配置された温度検出部と、温度検出部による温度検出値に基づいて温度推移を色で判別可能に表示する表示手段とを備えた温度計測装置が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−331377号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の温度計測装置では、食物の中心温度を計測できず、鍋底が食中毒を発生させる菌の死滅する温度であっても、食物の中心温度が該菌の繁殖容易な温度の場合もあった。
【0006】
本発明は上記課題に鑑みてなされたものであり、食物の中心温度を計測することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の調理器具は、間隔を介して設けられた、複数の温度センサを備えた調理器具であって、前記各温度センサによる温度分布に基づいて食物中心温度を算出する中心温度算出手段とを備えたことを特徴とする。
また、前記中心温度算出手段は、複数の前記温度センサによる温度分布に基づいて、食物と大気との境の最も近くに位置する境近傍温度センサを前記複数の温度センサの中から特定する境近傍温度センサ特定手段とを有し、先端の前記温度センサから前記境近傍温度センサまでの複数の前記温度センサによる温度分布に基づいて食物中心温度を算出してもよい。
また、前記複数の温度センサの重力方向に対する傾斜角度を検出する傾き検出手段とを備え、前記中心温度算出手段は、複数の前記温度センサによる温度分布に基づいて、食物の中心の最も近くに位置する中心近傍温度センサを前記複数の温度センサの中から特定する中心近傍温度センサ特定手段と、予め記憶された前記温度検出手段の先端から前記中心近傍温度センサまでの長さと前記傾斜角度とから前記中心近傍温度センサの前記食物内の位置を算出する中心近傍温度センサ位置算出手段と、複数の前記温度センサによる温度分布に基づいて、前記食物を収容した収容器の縁の最も近くに位置する縁近傍温度センサを前記複数の温度センサの中から特定する縁近傍温度センサ特定手段と、複数の前記温度センサによる温度分布に基づいて、食物と大気との境の最も近くに位置する境近傍温度センサを前記複数の温度センサの中から特定する境近傍温度センサ特定手段と、予め記憶された前記複数の温度センサを有する温度検出手段の先端から前記縁近傍温度センサまでの長さと前記傾斜角度と、予め記憶された前記温度検出手段の先端から前記境近傍温度センサまでの長さと前記傾斜角度とから食物中心位置を算出する食物中心位置算出手段とを有し、前記食物中心位置からの距離に応じて予め設定された補正量で前記中心近傍温度センサの計測温度を補正して食物中心温度を算出してもよい。
また、前記傾き検出手段によって検出される前記傾斜角度について、最も高頻度に取得する前記傾斜角度を設定傾斜角度として取得する設定傾斜角度取得手段を備え、前記中心温度算出手段は、前記傾き検出手段によって検出された前記傾斜角度が前記設定傾斜角度と同一であるときに、複数の前記温度センサによる温度分布に基づいて食物中心温度を算出してもよい。
また、前記温度検出手段の先端と該先端よりも低い温度を有する箇所との温度差によって発電する電源手段とを備えてもよい。
また、前記食物中心温度を表示する表示手段とを備えてもよい。
また、前記食物中心温度が所定温度に達してから所定時間経過したことを報知する報知手段とを備えてもよい。
本発明の調理器具システムは、間隔を介して設けられた、複数の温度センサを備えた調理器具と前記調理器具による計測温度を記憶するサーバとを備えた調理器具システムであって、前記調理器具は、前記各温度センサによる温度分布に基づいて食物中心温度を算出する中心温度算出手段と、前記複数の温度センサによる計測温度を送信する通信部とを備え、前記サーバは、前記通信部から送信された前記計測温度を蓄積する計測情報記憶手段とを備えたことを特徴とする。
【発明の効果】
【0008】
本発明によれば、食物の中心温度を計測することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態に係る調理器具の外観を示す概略図である。
【図2】図1に示すプローブ部に複数の温度センサが格納されている様子を示す拡大イメージ図である。
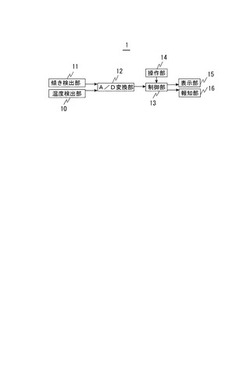
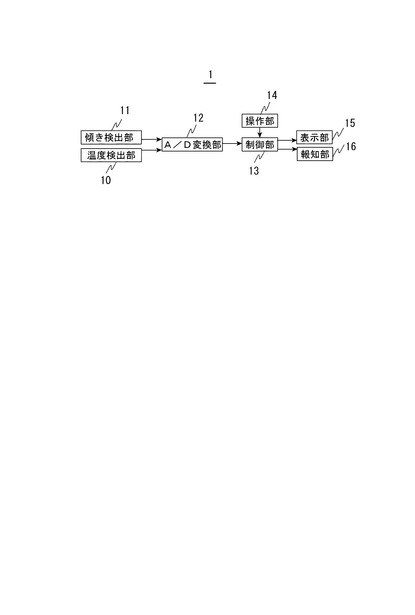
【図3】図1に示す調理器具の制御構成を示す機能ブロック図である。
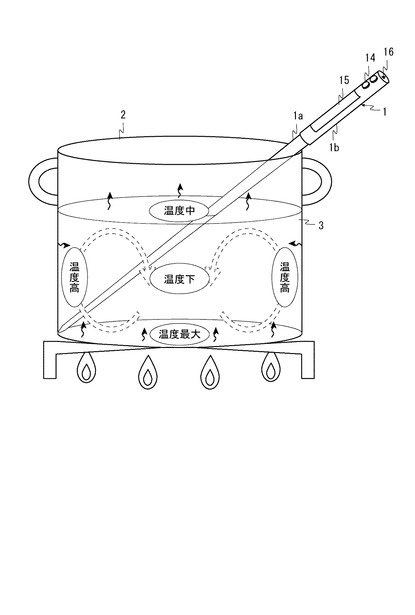
【図4】図1に示す調理器具が、加熱調理されている液体状食物内に挿入されている様子を示すイメージ図である。
【図5】図3に示す制御部の食中毒防止調理支援処理の流れを示すフローチャートである。
【図6】図3に示す調理器具の一例を示す図である。
【図7】本発明に係る調理器具が、加熱調理されている固体状食物内に挿入されている様子を示すイメージ図である。
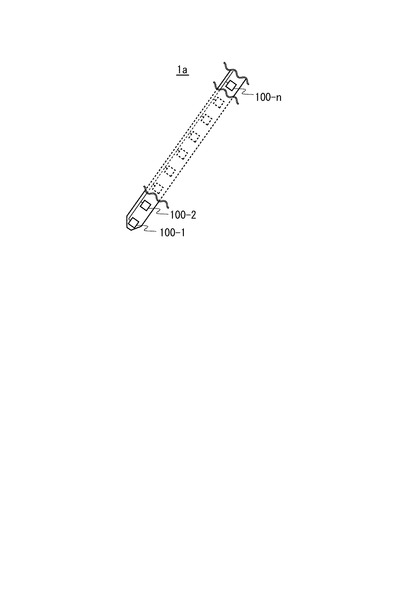
【図8】本発明に係る調理器具システムの制御構成全体を示す図である。
【発明を実施するための形態】
【0010】
以下、図を参照して本発明の実施形態を詳細に説明する。
【0011】
図1に示すように、調理器具1は、プローブ部1aと持ち手部1bとクリップ部1cと表示部15と操作部14と報知部16とを備えている。クリップ部1cは、伸縮及び角度調整可能な構成を有しており、例えば鍋の縁等に調理器具1を固定可能にするためのものである。プローブ部1aには、図2に示すように複数の温度センサ100−1〜100−n(nは自然数)が配置されている。以下、各温度センサを区別しない場合、単に温度センサ100として説明する。
【0012】
図3は、調理器具1の制御構成を示す機能ブロック図である。調理器具1は、温度検出部10と傾き検出部11とA/D変換部12と制御部13と操作部14と表示部15と報知部16とを備えている。
【0013】
操作部14は、例えばボタン等で構成され、利用者によって操作されることで、例えば
、表示部15に表示される各種のメニュー画面に従って操作や設定を行ったり、電源のON/OFFを切り替えたりする。操作部14は、表示部15のタッチパネルとして構成されてもよい。
【0014】
表示部15は、例えば液晶表示器等で構成され、制御部13の制御に従って、温度検出部10による計測温度や、カウントダウン情報、各種のメニュー等を表示する。
報知部16は、制御部13の制御に従って、音声やアラーム等による報知音を出力する。
【0015】
温度検出部10(プローブ部1a)は、所定の間隔を介して直列に配置された複数の温度センサ100−1〜100−nで構成される。各温度センサ100は、例えば、約−50℃〜300℃の耐熱性を有するサーミスタ等により構成され、温度分布の状況を例えば1秒毎にセンシング可能となっている。温度検出部10は、各温度センサ100により計測された温度をA/D変換部12に出力する。
【0016】
傾き検出部11は、例えば加速度センサ等で構成され、温度検出部10の重力方向に対する傾斜角度を検出し、A/D変換部12に出力する。
【0017】
A/D変換部12は、温度検出部10から取得した計測温度をアナログ値からデジタル値に変換して制御部13に出力する。また、A/D変換部12は、傾き検出部11から取得した傾斜角度をアナログ値からデジタル値に変換して制御部13に出力する。
【0018】
制御部13は、マイクロコンピュータ等で構成され、不図示のROM等に記憶されたプログラムを読み出して不図示のRAM等に展開して実行することで、調理器具1の各部を制御する。なお、制御部13による制御処理は、ハードウェア回路により構成されてもよく、ソフトウェアとハードウェアとの混合により構成されてもよい。
【0019】
制御部13は、食中毒防止調理支援処理を行う。具体的には、制御部13は、各温度センサ100及び傾き検出部11による計測値に基づいて、食物3の中心温度を算出する。制御部13は、算出した中心温度が所定温度(例えば、食中毒を防止するために必要な加熱温度であり、75℃等に設定されればよい)に達したと判定すると、不図示のタイマーをスタートさせ、所定時間(例えば、食中毒を防止するために必要な加熱時間であり、1分等に設定されればよい)に達するまでの残り時間を示すカウントダウン情報を表示部15に表示させる。このカウントダウン情報は、文字や図形、色彩等で表示される。例えば、カウントダウン情報は、「残り20秒」と表示されたり、残り時間によって顔の表情が変化する等のアイコンの変化で表示されたり、残り時間によって表示部15の色彩が変化して表示されたりしてもよい。制御部13は、不図示のタイマーのカウントダウン情報により所定時間に達したと判定すると、所定時間加熱されたことを知らせる報知音を報知部16に出力させ、利用者に食中毒を防止するための加熱処置が適切に施されたことを知らせる。
【0020】
次に、具体的に、制御部13による食中毒防止調理支援処理を説明する。ここでは、例えば、カレー等の液体状の食物を加熱する場合を例に説明する。
【0021】
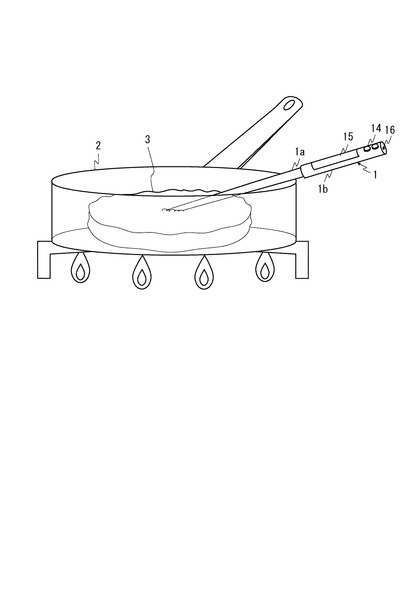
図4は、非定常状態(加熱により液体状の食物3の温度分布が時間的に変化する状態)にある、鍋2内のある時(瞬間)の液体状の食物3(以下、液体状食物3と称する)の温度分布を示す概略図である。図4では、調理用の鍋2に液体状食物3が入れられており、鍋2の底が加熱調理器(電磁調理器、ガスコンロ等)により加熱されている様子を示している。調理器具1は、プローブ部1aの先端が鍋2の隅に接するとともにプローブ部1aの一部が鍋2の縁に接している。つまり、プローブ部1aが鍋2の縁に立て掛けられて鍋2内に入れられた状態となっており、鍋2の対角線方向に配置されて鍋2内に入れられている。
【0022】
鍋2の底近傍の液体状食物3は、鍋2の底に熱源があるため、鍋2の底からの熱が伝わることにより、鍋2内の液体状食物3全体の中で最も高温となる。鍋2の底近傍の液体状食物3は、加熱されることによって密度が低くなり上昇する。その際、鍋2の底近傍の液体状食物3は、鍋2側面方向に引き寄せられながら上昇する。一般的に鍋2は鍋2全体の熱伝導効率が高くなるよう設計されているため、鍋2側面からの熱により鍋2側面近傍の液体状食物3において上昇方向の力が働いており、鍋2の底近傍の液体状食物3と鍋2側面近傍の液体状食物3とが運動方向を合わせるように動くためである。そして、鍋2内の液面では、大気との温度差による放熱が行われるから、液面近傍の液状態食物3は少し冷えて密度が高くなり下降する。すなわち、鍋2内の液体状食物3は、鍋2の底から鍋2側面を伝って上昇して鍋2中心部を下降するように対流する。そのため、図4では、鍋2内における液体状食物3の温度分布は、「鍋2の底近傍の液体状食物3>鍋2側面近傍の液体状食物3>液面近傍の液体状食物3>液体状食物3全体の中心部」の順となる。
【0023】
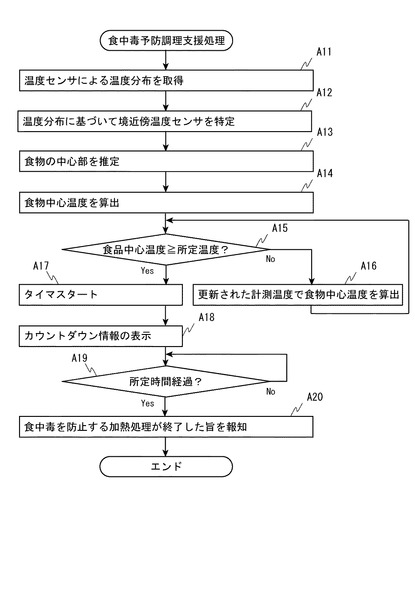
ここで、図5を参照して、制御部13による食中毒防止調理支援処理の流れを説明する。なお、制御部13は、いずれかの温度センサ100、例えば温度センサ100−1による計測温度が所定時間内に所定温度以上変化した場合に、調理器具1が食物3内に配置され加熱されていると判断し、食中毒防止調理支援処理を開始すればよい。
【0024】
まず、ステップA11で、制御部13は、各温度センサ100による温度分布を取得する。
【0025】
次に、ステップA12で、制御部13は、各温度センサ100による温度分布に基づいて境近傍温度センサを特定する。液体状食物3が加熱されると、内部(液体内)に位置する各温度センサ100が、加熱される液体状食物3の温度を検出するのに対し、外部(液体外、すなわち大気中)に位置する各温度センサ100は、大気中の温度を計測するため、内部の各温度センサ100による計測値に比べると大気中に位置する各温度センサ100の計測温度が明らかに低い値で計測される。そこで、制御部13は、複数の温度センサ100による温度分布に基づいて、例えば温度センサ100間における計測温度の変化により、食物3と大気との境、即ち液面位置を検出し、液面の最も近くに位置する温度センサ100を境近傍温度センサとして特定する。
【0026】
ステップA13で、制御部13は、温度検出部10における温度センサ100−1から境近傍温度センサまでの温度分布に基づいて、食物3全体の中心部を推定する。
【0027】
加熱中における食物3の内部に位置する各温度センサ100による温度分布状況は、対流により食物3全体の中心部からの距離に応じた温度分布となる。この温度分布について、例えば、予め加熱時における食物3内の中心からの距離に応じた温度分布が不図示の記憶部に記憶されていてもよい。また、利用者は、頻繁に調理する調理メニューについて、食物3を入れて調理中の鍋2に調理器具1をセットして鍋2を加熱したときに、制御部13に、各温度センサ100によって計測される温度分布を、加熱時における食物3内の中心からの距離に応じた温度分布として不図示の記憶部に記憶させてもよい。また、調理メニューに対応する温度分布を不図示の記憶部に記憶させ、表示部15に調理メニューを選択するメニュー画面を表示させたときに、操作部14を介して選択された調理メニューに対応する温度分布が読み出されてもよい。制御部13は、記憶された温度分布と、温度センサ100−1から境近傍温度センサまでの温度分布とを対応させて、食物3の中心部を推定する。
【0028】
ステップA14で、制御部13は、推定した食物3の中心部の温度を熱伝導の法則(フーリエの法則)等により算出する。
【0029】
例えば、制御部13は、温度センサ100−1から境近傍温度センサまでの温度分布において、最も計測温度が低い温度センサ100を食物3の中心部の最も近くに位置する温度センサ(以下、中心近傍温度センサと称する)として特定する。制御部13は、この中心近傍温度センサによる計測温度を実際の食物3の中心部の温度に近づけるための補正を行って食物中心温度を算出する。
【0030】
例えば、制御部13は、食物3の中心部からの距離に応じて予め設定された補正量で、中心近傍温度センサの計測温度を補正する。この補正量は、液体状食物3全体の中心部からの距離及び方向に応じて、熱伝導の法則(フーリエの法則)等を考慮して予め設定されており、基本的に液体状食物3全体の中心部から遠ざかるほど補正量が大きくなるよう設定されている。制御部13は、補正後の計測温度を食物中心温度とし、中心近傍温度センサによる計測温度が更新される度に、その計測温度に対する補正を行って食物中心温度を算出する。
【0031】
ステップA15で、制御部13は、算出した食物中心温度が所定温度(必要加熱温度)に達しているか判定する。ステップA15でNoの場合、ステップA16に進み、温度検出部10により更新された温度分布で食物中心温度を算出して、ステップA15に戻る。
【0032】
ステップA15でYesの場合、すなわち、食物中心温度が所定温度に達している場合、制御部13は、ステップA17に進み、不図示のタイマーをスタートさせて、所定温度に達してから所定時間(必要加熱時間)に達するまでのカウントダウンを開始させる。ステップA18で、制御部13は、表示部15に不図示のタイマーによるカウントダウン情報を表示させる。また、それとともに、制御部13は、不図示のタイマーによるカウントダウンが開始されたことを報知部16により報知させてもよい。
【0033】
ステップA19で、制御部13は、所定時間経過したか、すなわち、不図示のタイマーによるカウントダウンが終了したか判定する。ステップA19でNoの場合、ステップA19に戻る。ステップA19でYesの場合、ステップA20に進み、制御部13は、表示部15に所定時間が経過した旨(食中毒を防止する加熱処理が終了した旨)を表示するとともに、所定時間が経過した旨を報知部16に報知させ、処理を終了する。これにより、利用者は、食物3の中心部が所定温度で所定時間加熱され、食中毒を防止できる調理がなされたことを知ることができる。
【0034】
このように、本実施形態によれば、調理に不慣れな利用者による調理ミスや、調理に慣れている利用者の場合でも不注意等により発生しやすい食中毒を未然に防ぐことができる。これにより、特に、業務として大量に食物3を調理する現場において、食中毒を防止するための調理を徹底させることができる。また、本実施形態によれば、食物3内に入れられた調理器具1の温度分布に基づいて、食物3全体の中心温度を算出することができるので、食物3の中心部に調理器具1が接する必要がなく、簡便に使用することができる。
【0035】
なお、上記の処理において、制御部13は、温度センサ100−1から境近傍温度センサまでの温度分布に基づいて、食物3の中心部を推定したが、食物3を入れている鍋2の大きさを考慮して食物3の中心部を推定してもよい。
【0036】
具体的には、制御部13は、複数の温度センサ100による温度分布において、後方の温度センサ100による温度分布で飛び抜けて高い温度を計測する温度センサ100を特定する。これは、温度検出部10が鍋2の縁に立て掛けられていることにより、鍋2の熱伝導で鍋2の縁の最も近くに位置する温度センサ100が高温を計測するためである。制御部13は、後方の温度センサ100による温度分布に基づいて、鍋2の縁の最も近くに位置する温度センサ100を縁近傍温度センサとして特定する。次に、制御部13は、傾き検出部11による傾斜角度と温度検出部10の先端から縁近傍温度センサまでの長さとから三角関数等により鍋2の半径を求める。温度検出部10の先端から各温度センサ100までの長さは予め不図示の記憶部に記憶されていればよい。制御部13は、同様にして、傾き検出部11による傾斜角度と温度検出部10の先端から境近傍温度センサまでの長さとから三角関数等により鍋2の底(鍋2内底部)から液面までの半分の高さを求める。これにより、制御部13は、鍋2の半径と液面までの半分の高さとで構成される食物3の中心部の位置を取得することができる。
【0037】
同様にして、制御部13は、中心近傍温度センサの位置を求めることができる。制御部13は、傾き検出部11による傾斜角度と予め記憶された温度検出部10の先端から中心近傍温度センサまでの長さとから三角関数等により、中心近傍温度センサの鍋2内の位置を取得する。
【0038】
制御部13は、このようにして求めた食物3の中心部の位置に対する中心近傍温度センサの位置について、食物3の中心部からの距離及び方向に応じた補正量で、中心近傍温度センサの計測温度を補正して食物中心温度を算出してもよい。
【0039】
また、制御部13は、各温度センサ100により時々刻々と更新される温度分布が予め記憶された理想的な温度分布に近似したときに、計測中の温度分布に基づいて、中心近傍温度センサや縁近傍温度センサ、境近傍温度センサ等を特定してもよい。
【0040】
なお、制御部13は、処理を簡便にするために、食物3内に位置するすべての温度センサ100の計測温度が所定温度(必要加熱温度)に達すると、食物中心温度が所定温度(必要加熱温度)であるものとして、不図示のタイマーをスタートさせてもよい。この場合、制御部13は、不図示のタイマーによるカウントダウンの計測時間を必要加熱時間よりも長めに設定するとよい。
【0041】
また、制御部13は、傾き検出部11により検出される傾斜角度について、最も高頻度に(且つ、長時間)取得した傾斜角度を、調理器具1が計測状態として安定してセットされている状態、すなわち、調理器具1が鍋の縁に安定して立て掛けられた状態の傾斜角度と判定し、この傾斜角度を設定傾斜角度として取得する。なお、制御部13は、この設定傾斜角度を中心とする所定範囲内の角度を設定傾斜角度としてもよい。制御部13は、傾き検出部11から傾斜角度を取得する度に、又は不図示の記憶部に蓄積された傾斜角度に基づいて所定時間毎に、動的に設定傾斜角度を取得し直す。そのため、例えば、初めは調理器具1の先端が鍋2の隅に届いておらず、鍋2の底に接しつつ鍋2の縁に立て掛けられた状態の傾斜角度が設定傾斜角度として取得されていても、調理器具1の自重等で調理器具1が動いて先端が鍋2の隅に届き、鍋2の隅に接しつつ鍋2の縁に立て掛けられた状態で安定すれば、その傾斜角度が設定傾斜角度として動的に取得される。
【0042】
そして、制御部13は、傾き検出部11により検出される傾斜角度が設定傾斜角度である時に、各温度センサ100によりセンシングされる温度を計測温度として取得する。この場合、制御部13は、傾き検出部11により検出される傾斜角度が設定傾斜角度でなければ、温度センサ100によりセンシングされる温度を計測温度として利用しない。これによれば、例えば、対流によって調理器具1が動いたり、利用者によって調理器具1が動かされたりしている間に、温度センサ100によりセンシングされる温度を計測値から除外することができる。また、この場合、制御部13は、例えば対流等により調理器具1が動いて計測が正確に行えないことを、表示部15や報知部16により利用者に知らせて、調理器具1をセットし直すよう促してもよい。つまり、制御部13は、食中毒防止調理支援処理を開始してから、傾き検出部11を介して設定傾斜角度でない傾斜角度を取得すると、食中毒防止調理支援処理を中止して、傾き検出部11による傾斜角度が設定傾斜角度になるのを待って、再び食中毒防止調理支援処理を最初からやり直すことになる。
【0043】
ただし、制御部13は、傾斜角度が設定傾斜角度でなかったときの時間が短時間であれば、食中毒防止調理支援処理を中止しなくてもよい。この場合、制御部13は、傾き検出部11による傾斜角度が設定傾斜角度でない間の前後であって、傾斜角度が設定傾斜角度である場合の温度センサ100の温度分布に基づいて、傾斜角度が設定傾斜角度でない間の温度センサ100の温度分布を線形補完する、又は前後いずれかの計測温度と同じ温度であるものとして、継続的に温度維持がされたものとして取り扱ってもよい。また、制御部13は、算出した食物中心温度が所定温度に達して、不図示のタイマーによるカウントダウンを行っている場合に、傾き検出部11から設定傾斜角度でない傾斜角度を取得したときは、不図示のタイマーによるカウントダウンを中止せずに継続させてもよい。この場合、制御部13は、再び傾き検出部11による傾斜角度が設定傾斜角度に落ち着いたときに、改めて食物中心温度を算出し、食物中心温度が所定温度以上であることを条件に、継続している不図示のタイマーのカウントダウン状態から食中毒防止調理支援処理を継続すればよい。
【0044】
また、制御部13は、不図示のタイマーによるカウントダウンが終了してから所定時間(例えば15分等)経過しても温度センサ100の計測温度が低下しない場合、加熱し過ぎである旨を表示部15や報知部16に報知させてもよい。また、制御部13は、不図示のタイマーによるカウントダウンが終了してから所定時間経過して、温度センサ100の計測温度が低下した場合に、温度センサ100の計測温度が低下してから第2の所定時間経過したときの計測温度が所定温度以上であるときに、食物3が放置されている旨を表示部15や報知部16に報知させてもよい。なぜなら、例えば、カレー等の煮込み料理におけるウェルシュ菌は、耐熱性が高く15℃〜40℃で増殖することが知られている。そのため、せっかく食中毒を防止するための加熱調理を行っても、調理後の食物3の放置時間が長くなると、何らかの原因で残存していた菌や後から付着した菌が増殖し始めるからである。
【0045】
また、調理器具1は、ゼーベック効果を利用した熱電対により発電を行う電源部を備えていてもよい。具体的には、電源部は、加熱中の調理器具1内において温度差が生じる箇所に接するように設けられ、ゼーベック効果により発電した電力を電源として調理器具1の各部に供給している。例えば、電源部は、互いに接合された素材の異なる二種類の金属線で構成されてもよい。電源部は、互いに接合された金属線の接合点の一方が、調理器具1内で最も高温となるプローブ部1aの先端に取り付けられ、他方が、プローブ部1aの先端よりも低温となるプローブ部1aの根元部分(持ち手部1bとプローブ部1aとの境目部分)又は持ち手部1bに取り付けられている。調理器具1が挿入された食物3が加熱されると、接合点間の温度差によって起電力が生じるので、電源部は、その電力を取り出して電源として各部に供給を行う。
【0046】
つまり、調理器具1が挿入された食物3が加熱されると、自動的に電源部が発電して電源がONとなり、各部に電力が供給されて制御部13による食中毒防止調理支援処理が開始される。このようなエネルギー・ハーベスティング技術により、電池交換のための蓋を設けたり、外部電源によるバッテリー充電のための端子を露出させたりせずに済むので、持ち手部1bまで含めて調理器具1全体を密封して完全防水とすることができる。そのため、調理器具1が、濡れる環境で使用されても、漏水等を気にすることなく使用することができ、また、電池交換不要なためメンテナンスフリーとすることができる。なお、電源部は、ボタン型電池や、リチウムイオン電池等の充電可能な蓄電池により構成されていてもよい。この場合、電源部は、ゼーベック効果を利用して蓄電池に充電を行ってもよい。
【0047】
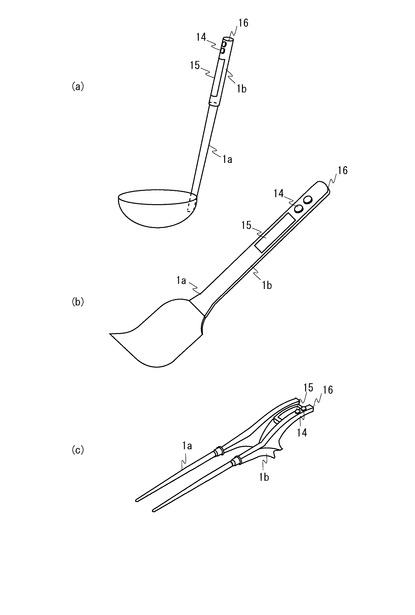
以上に説明した調理器具1は、他の調理器具に実装されてもよい。例えば、図6(a)は、調理器具がお玉杓子である場合の一例であり、図6(b)は、調理器具がヘラである場合の一例であり、図6(c)は、調理器具が菜箸である場合の一例である。なお、図6(c)に示す菜箸は、持ち手部1bがユニバーサルデザインに対応したものを示している。
【0048】
このように、一般的によく使用される調理器具に本実施形態を適用することで、利用者は、普段の調理作業の中で食中毒を防止する調理を行いやすくなる。なお、この場合、食物中心温度を算出する際の処理において、調理器具の形状及び使用形態に合わせて、傾斜角度や調理器具の先端から各温度センサ100までの長さ等の値が、適宜補正されることは言うまでもない。
【0049】
また、上記実施形態では、一例として、調理器具1を液体状の食物3内に挿入し、中心温度を計測する構成を説明したが、調理器具1を固形状の食物3内に突き刺して中心温度を計測することもできる。例えば、図7に示すように、ハンバーグ等の固形状の食物3内に調理器具1が挿入されてもよい。また、この場合、利用者は、例えば、操作部16を介して、「突き刺しモード」で計測する旨を選択した後に、調理器具1による食中毒防止調理支援処理を開始させてもよい。制御部13は、「突き刺しモード」が選択された場合、固形状の食物3内の温度と大気中の温度との温度差により、温度センサ100の温度分布に基づいて境近傍温度センサを特定する。そして、制御部13は、温度センサ100−1から境近傍温度センサまでの温度分布に基づいて、固形状の食物3全体の中心温度を推定すればよい。また、調理器具1は、固体状の食物3に突き刺された際に、その先端が固体状の食物3を突き抜けてもよい。この場合、制御部13は、固形状の食物3内の温度と大気中の温度との温度差により、温度センサ100による温度分布に基づいて、固形状の食物3における先端側の境近傍温度センサと持ち手部1b側の境近傍温度センサとの二箇所の境近傍温度センサを特定する。そして、制御部13は、その二箇所の境近傍温度センサ間の温度分布に基づいて、固形状の食物3全体の中心温度を推定すればよい。
【0050】
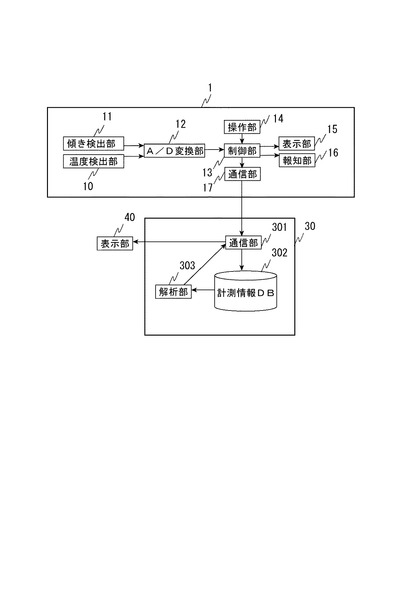
また、調理器具1による計測情報は、外部に蓄積されるようにしてもよい。蓄積された計測情報は、例えば他の計測機器による計測情報とともに総合的に解析され、表示部15や別途設けられたモニタ等に各種の情報として表示される。図8は、調理器具1を用いたシステムの構成を示す機能ブロック図である。ここでは、上記実施形態と同様の構成には同一の符号を付し、説明を省略する。
【0051】
調理器具1には、新たに通信部17が設けられている。A/D変換部12と制御部13と通信部17とは、1つのICチップで構成されてもよい。制御部13は、A/D変換部12を介して取得した傾き検出部11による傾斜角度及び温度検出部10による計測温度や、算出した食物中心温度等で構成される計測情報と、調理器具1を識別可能な識別IDとを、通信部17を介して、サーバ30に送信する。通信部17は、例えばZigBee(登録商標)等による無線通信によって、計測情報等をサーバ30に送信してもよい。
【0052】
サーバ30は、通信部301と計測情報DB302と解析部303とを備えている。サーバ30は、例えばクラウドサーバ30等で構成されてもよい。通信部301は、調理器具1から送信された計測情報と識別IDとを取得すると、識別IDに対応付けて計測情報を計測情報DB302に蓄積する。解析部303は、計測情報DB302に蓄積された計測情報に基づいて、食中毒を防止するために適切な加熱調理がなされているか等を解析し、解析結果を通信部301を介して表示部40に表示させる。解析部303は、通信部301を介して解析結果を表示部15に表示させてもよい。これによれば、例えば、過去の調理において、適切に食中毒を防止するための加熱処理がなされていたのか等を確認することができる。なお、調理器具1に記憶部を設け、この記憶部に調理器具1による計測情報を記憶させてもよい。この場合、制御部13は、操作部14の操作により記憶部に記憶された過去の計測情報に基づいて、表示部15に過去の調理において適切に食中毒を防止するための加熱処理がなされていたかを判定し、表示部15に表示させてもよい。
【0053】
本発明は上述した実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々様々に変更が可能であることは言うまでもない。なお、上記実施形態において、同様の機能を示す構成には、同一の符号を付してある。
【符号の説明】
【0054】
1:調理器具
1a:プローブ部
1b:持ち手部
1c:クリップ部
2:鍋
3:食物
10:温度検出部
100(100−1、100−2、・・・、100−n):温度センサ
11:傾き検出部
12:A/D変換部
13:制御部
14:操作部
15、40:表示部
16:報知部
17、301:通信部
30:サーバ
302:計測情報DB
303:解析部
【技術分野】
【0001】
本発明は、計測対象物の温度を計測する調理器具及び調理器具システムに関する。
【背景技術】
【0002】
毎年、相次いで食中毒事件が発生している。食中毒事件は、高齢者や幼児等にとって命を落としかねない社会的問題であり、また、企業にとってもその存続を脅かす死活問題となっている。この食中毒防止の一手段として、従来、温度管理を必要とする計測対象物に対して温度計測装置を挿入して温度を計測することが行われている。
【0003】
温度計測装置としては、例えば、複数の温度センサが等間隔で配置された温度検出部と、温度検出部による温度検出値に基づいて温度推移を色で判別可能に表示する表示手段とを備えた温度計測装置が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−331377号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の温度計測装置では、食物の中心温度を計測できず、鍋底が食中毒を発生させる菌の死滅する温度であっても、食物の中心温度が該菌の繁殖容易な温度の場合もあった。
【0006】
本発明は上記課題に鑑みてなされたものであり、食物の中心温度を計測することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の調理器具は、間隔を介して設けられた、複数の温度センサを備えた調理器具であって、前記各温度センサによる温度分布に基づいて食物中心温度を算出する中心温度算出手段とを備えたことを特徴とする。
また、前記中心温度算出手段は、複数の前記温度センサによる温度分布に基づいて、食物と大気との境の最も近くに位置する境近傍温度センサを前記複数の温度センサの中から特定する境近傍温度センサ特定手段とを有し、先端の前記温度センサから前記境近傍温度センサまでの複数の前記温度センサによる温度分布に基づいて食物中心温度を算出してもよい。
また、前記複数の温度センサの重力方向に対する傾斜角度を検出する傾き検出手段とを備え、前記中心温度算出手段は、複数の前記温度センサによる温度分布に基づいて、食物の中心の最も近くに位置する中心近傍温度センサを前記複数の温度センサの中から特定する中心近傍温度センサ特定手段と、予め記憶された前記温度検出手段の先端から前記中心近傍温度センサまでの長さと前記傾斜角度とから前記中心近傍温度センサの前記食物内の位置を算出する中心近傍温度センサ位置算出手段と、複数の前記温度センサによる温度分布に基づいて、前記食物を収容した収容器の縁の最も近くに位置する縁近傍温度センサを前記複数の温度センサの中から特定する縁近傍温度センサ特定手段と、複数の前記温度センサによる温度分布に基づいて、食物と大気との境の最も近くに位置する境近傍温度センサを前記複数の温度センサの中から特定する境近傍温度センサ特定手段と、予め記憶された前記複数の温度センサを有する温度検出手段の先端から前記縁近傍温度センサまでの長さと前記傾斜角度と、予め記憶された前記温度検出手段の先端から前記境近傍温度センサまでの長さと前記傾斜角度とから食物中心位置を算出する食物中心位置算出手段とを有し、前記食物中心位置からの距離に応じて予め設定された補正量で前記中心近傍温度センサの計測温度を補正して食物中心温度を算出してもよい。
また、前記傾き検出手段によって検出される前記傾斜角度について、最も高頻度に取得する前記傾斜角度を設定傾斜角度として取得する設定傾斜角度取得手段を備え、前記中心温度算出手段は、前記傾き検出手段によって検出された前記傾斜角度が前記設定傾斜角度と同一であるときに、複数の前記温度センサによる温度分布に基づいて食物中心温度を算出してもよい。
また、前記温度検出手段の先端と該先端よりも低い温度を有する箇所との温度差によって発電する電源手段とを備えてもよい。
また、前記食物中心温度を表示する表示手段とを備えてもよい。
また、前記食物中心温度が所定温度に達してから所定時間経過したことを報知する報知手段とを備えてもよい。
本発明の調理器具システムは、間隔を介して設けられた、複数の温度センサを備えた調理器具と前記調理器具による計測温度を記憶するサーバとを備えた調理器具システムであって、前記調理器具は、前記各温度センサによる温度分布に基づいて食物中心温度を算出する中心温度算出手段と、前記複数の温度センサによる計測温度を送信する通信部とを備え、前記サーバは、前記通信部から送信された前記計測温度を蓄積する計測情報記憶手段とを備えたことを特徴とする。
【発明の効果】
【0008】
本発明によれば、食物の中心温度を計測することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態に係る調理器具の外観を示す概略図である。
【図2】図1に示すプローブ部に複数の温度センサが格納されている様子を示す拡大イメージ図である。
【図3】図1に示す調理器具の制御構成を示す機能ブロック図である。
【図4】図1に示す調理器具が、加熱調理されている液体状食物内に挿入されている様子を示すイメージ図である。
【図5】図3に示す制御部の食中毒防止調理支援処理の流れを示すフローチャートである。
【図6】図3に示す調理器具の一例を示す図である。
【図7】本発明に係る調理器具が、加熱調理されている固体状食物内に挿入されている様子を示すイメージ図である。
【図8】本発明に係る調理器具システムの制御構成全体を示す図である。
【発明を実施するための形態】
【0010】
以下、図を参照して本発明の実施形態を詳細に説明する。
【0011】
図1に示すように、調理器具1は、プローブ部1aと持ち手部1bとクリップ部1cと表示部15と操作部14と報知部16とを備えている。クリップ部1cは、伸縮及び角度調整可能な構成を有しており、例えば鍋の縁等に調理器具1を固定可能にするためのものである。プローブ部1aには、図2に示すように複数の温度センサ100−1〜100−n(nは自然数)が配置されている。以下、各温度センサを区別しない場合、単に温度センサ100として説明する。
【0012】
図3は、調理器具1の制御構成を示す機能ブロック図である。調理器具1は、温度検出部10と傾き検出部11とA/D変換部12と制御部13と操作部14と表示部15と報知部16とを備えている。
【0013】
操作部14は、例えばボタン等で構成され、利用者によって操作されることで、例えば
、表示部15に表示される各種のメニュー画面に従って操作や設定を行ったり、電源のON/OFFを切り替えたりする。操作部14は、表示部15のタッチパネルとして構成されてもよい。
【0014】
表示部15は、例えば液晶表示器等で構成され、制御部13の制御に従って、温度検出部10による計測温度や、カウントダウン情報、各種のメニュー等を表示する。
報知部16は、制御部13の制御に従って、音声やアラーム等による報知音を出力する。
【0015】
温度検出部10(プローブ部1a)は、所定の間隔を介して直列に配置された複数の温度センサ100−1〜100−nで構成される。各温度センサ100は、例えば、約−50℃〜300℃の耐熱性を有するサーミスタ等により構成され、温度分布の状況を例えば1秒毎にセンシング可能となっている。温度検出部10は、各温度センサ100により計測された温度をA/D変換部12に出力する。
【0016】
傾き検出部11は、例えば加速度センサ等で構成され、温度検出部10の重力方向に対する傾斜角度を検出し、A/D変換部12に出力する。
【0017】
A/D変換部12は、温度検出部10から取得した計測温度をアナログ値からデジタル値に変換して制御部13に出力する。また、A/D変換部12は、傾き検出部11から取得した傾斜角度をアナログ値からデジタル値に変換して制御部13に出力する。
【0018】
制御部13は、マイクロコンピュータ等で構成され、不図示のROM等に記憶されたプログラムを読み出して不図示のRAM等に展開して実行することで、調理器具1の各部を制御する。なお、制御部13による制御処理は、ハードウェア回路により構成されてもよく、ソフトウェアとハードウェアとの混合により構成されてもよい。
【0019】
制御部13は、食中毒防止調理支援処理を行う。具体的には、制御部13は、各温度センサ100及び傾き検出部11による計測値に基づいて、食物3の中心温度を算出する。制御部13は、算出した中心温度が所定温度(例えば、食中毒を防止するために必要な加熱温度であり、75℃等に設定されればよい)に達したと判定すると、不図示のタイマーをスタートさせ、所定時間(例えば、食中毒を防止するために必要な加熱時間であり、1分等に設定されればよい)に達するまでの残り時間を示すカウントダウン情報を表示部15に表示させる。このカウントダウン情報は、文字や図形、色彩等で表示される。例えば、カウントダウン情報は、「残り20秒」と表示されたり、残り時間によって顔の表情が変化する等のアイコンの変化で表示されたり、残り時間によって表示部15の色彩が変化して表示されたりしてもよい。制御部13は、不図示のタイマーのカウントダウン情報により所定時間に達したと判定すると、所定時間加熱されたことを知らせる報知音を報知部16に出力させ、利用者に食中毒を防止するための加熱処置が適切に施されたことを知らせる。
【0020】
次に、具体的に、制御部13による食中毒防止調理支援処理を説明する。ここでは、例えば、カレー等の液体状の食物を加熱する場合を例に説明する。
【0021】
図4は、非定常状態(加熱により液体状の食物3の温度分布が時間的に変化する状態)にある、鍋2内のある時(瞬間)の液体状の食物3(以下、液体状食物3と称する)の温度分布を示す概略図である。図4では、調理用の鍋2に液体状食物3が入れられており、鍋2の底が加熱調理器(電磁調理器、ガスコンロ等)により加熱されている様子を示している。調理器具1は、プローブ部1aの先端が鍋2の隅に接するとともにプローブ部1aの一部が鍋2の縁に接している。つまり、プローブ部1aが鍋2の縁に立て掛けられて鍋2内に入れられた状態となっており、鍋2の対角線方向に配置されて鍋2内に入れられている。
【0022】
鍋2の底近傍の液体状食物3は、鍋2の底に熱源があるため、鍋2の底からの熱が伝わることにより、鍋2内の液体状食物3全体の中で最も高温となる。鍋2の底近傍の液体状食物3は、加熱されることによって密度が低くなり上昇する。その際、鍋2の底近傍の液体状食物3は、鍋2側面方向に引き寄せられながら上昇する。一般的に鍋2は鍋2全体の熱伝導効率が高くなるよう設計されているため、鍋2側面からの熱により鍋2側面近傍の液体状食物3において上昇方向の力が働いており、鍋2の底近傍の液体状食物3と鍋2側面近傍の液体状食物3とが運動方向を合わせるように動くためである。そして、鍋2内の液面では、大気との温度差による放熱が行われるから、液面近傍の液状態食物3は少し冷えて密度が高くなり下降する。すなわち、鍋2内の液体状食物3は、鍋2の底から鍋2側面を伝って上昇して鍋2中心部を下降するように対流する。そのため、図4では、鍋2内における液体状食物3の温度分布は、「鍋2の底近傍の液体状食物3>鍋2側面近傍の液体状食物3>液面近傍の液体状食物3>液体状食物3全体の中心部」の順となる。
【0023】
ここで、図5を参照して、制御部13による食中毒防止調理支援処理の流れを説明する。なお、制御部13は、いずれかの温度センサ100、例えば温度センサ100−1による計測温度が所定時間内に所定温度以上変化した場合に、調理器具1が食物3内に配置され加熱されていると判断し、食中毒防止調理支援処理を開始すればよい。
【0024】
まず、ステップA11で、制御部13は、各温度センサ100による温度分布を取得する。
【0025】
次に、ステップA12で、制御部13は、各温度センサ100による温度分布に基づいて境近傍温度センサを特定する。液体状食物3が加熱されると、内部(液体内)に位置する各温度センサ100が、加熱される液体状食物3の温度を検出するのに対し、外部(液体外、すなわち大気中)に位置する各温度センサ100は、大気中の温度を計測するため、内部の各温度センサ100による計測値に比べると大気中に位置する各温度センサ100の計測温度が明らかに低い値で計測される。そこで、制御部13は、複数の温度センサ100による温度分布に基づいて、例えば温度センサ100間における計測温度の変化により、食物3と大気との境、即ち液面位置を検出し、液面の最も近くに位置する温度センサ100を境近傍温度センサとして特定する。
【0026】
ステップA13で、制御部13は、温度検出部10における温度センサ100−1から境近傍温度センサまでの温度分布に基づいて、食物3全体の中心部を推定する。
【0027】
加熱中における食物3の内部に位置する各温度センサ100による温度分布状況は、対流により食物3全体の中心部からの距離に応じた温度分布となる。この温度分布について、例えば、予め加熱時における食物3内の中心からの距離に応じた温度分布が不図示の記憶部に記憶されていてもよい。また、利用者は、頻繁に調理する調理メニューについて、食物3を入れて調理中の鍋2に調理器具1をセットして鍋2を加熱したときに、制御部13に、各温度センサ100によって計測される温度分布を、加熱時における食物3内の中心からの距離に応じた温度分布として不図示の記憶部に記憶させてもよい。また、調理メニューに対応する温度分布を不図示の記憶部に記憶させ、表示部15に調理メニューを選択するメニュー画面を表示させたときに、操作部14を介して選択された調理メニューに対応する温度分布が読み出されてもよい。制御部13は、記憶された温度分布と、温度センサ100−1から境近傍温度センサまでの温度分布とを対応させて、食物3の中心部を推定する。
【0028】
ステップA14で、制御部13は、推定した食物3の中心部の温度を熱伝導の法則(フーリエの法則)等により算出する。
【0029】
例えば、制御部13は、温度センサ100−1から境近傍温度センサまでの温度分布において、最も計測温度が低い温度センサ100を食物3の中心部の最も近くに位置する温度センサ(以下、中心近傍温度センサと称する)として特定する。制御部13は、この中心近傍温度センサによる計測温度を実際の食物3の中心部の温度に近づけるための補正を行って食物中心温度を算出する。
【0030】
例えば、制御部13は、食物3の中心部からの距離に応じて予め設定された補正量で、中心近傍温度センサの計測温度を補正する。この補正量は、液体状食物3全体の中心部からの距離及び方向に応じて、熱伝導の法則(フーリエの法則)等を考慮して予め設定されており、基本的に液体状食物3全体の中心部から遠ざかるほど補正量が大きくなるよう設定されている。制御部13は、補正後の計測温度を食物中心温度とし、中心近傍温度センサによる計測温度が更新される度に、その計測温度に対する補正を行って食物中心温度を算出する。
【0031】
ステップA15で、制御部13は、算出した食物中心温度が所定温度(必要加熱温度)に達しているか判定する。ステップA15でNoの場合、ステップA16に進み、温度検出部10により更新された温度分布で食物中心温度を算出して、ステップA15に戻る。
【0032】
ステップA15でYesの場合、すなわち、食物中心温度が所定温度に達している場合、制御部13は、ステップA17に進み、不図示のタイマーをスタートさせて、所定温度に達してから所定時間(必要加熱時間)に達するまでのカウントダウンを開始させる。ステップA18で、制御部13は、表示部15に不図示のタイマーによるカウントダウン情報を表示させる。また、それとともに、制御部13は、不図示のタイマーによるカウントダウンが開始されたことを報知部16により報知させてもよい。
【0033】
ステップA19で、制御部13は、所定時間経過したか、すなわち、不図示のタイマーによるカウントダウンが終了したか判定する。ステップA19でNoの場合、ステップA19に戻る。ステップA19でYesの場合、ステップA20に進み、制御部13は、表示部15に所定時間が経過した旨(食中毒を防止する加熱処理が終了した旨)を表示するとともに、所定時間が経過した旨を報知部16に報知させ、処理を終了する。これにより、利用者は、食物3の中心部が所定温度で所定時間加熱され、食中毒を防止できる調理がなされたことを知ることができる。
【0034】
このように、本実施形態によれば、調理に不慣れな利用者による調理ミスや、調理に慣れている利用者の場合でも不注意等により発生しやすい食中毒を未然に防ぐことができる。これにより、特に、業務として大量に食物3を調理する現場において、食中毒を防止するための調理を徹底させることができる。また、本実施形態によれば、食物3内に入れられた調理器具1の温度分布に基づいて、食物3全体の中心温度を算出することができるので、食物3の中心部に調理器具1が接する必要がなく、簡便に使用することができる。
【0035】
なお、上記の処理において、制御部13は、温度センサ100−1から境近傍温度センサまでの温度分布に基づいて、食物3の中心部を推定したが、食物3を入れている鍋2の大きさを考慮して食物3の中心部を推定してもよい。
【0036】
具体的には、制御部13は、複数の温度センサ100による温度分布において、後方の温度センサ100による温度分布で飛び抜けて高い温度を計測する温度センサ100を特定する。これは、温度検出部10が鍋2の縁に立て掛けられていることにより、鍋2の熱伝導で鍋2の縁の最も近くに位置する温度センサ100が高温を計測するためである。制御部13は、後方の温度センサ100による温度分布に基づいて、鍋2の縁の最も近くに位置する温度センサ100を縁近傍温度センサとして特定する。次に、制御部13は、傾き検出部11による傾斜角度と温度検出部10の先端から縁近傍温度センサまでの長さとから三角関数等により鍋2の半径を求める。温度検出部10の先端から各温度センサ100までの長さは予め不図示の記憶部に記憶されていればよい。制御部13は、同様にして、傾き検出部11による傾斜角度と温度検出部10の先端から境近傍温度センサまでの長さとから三角関数等により鍋2の底(鍋2内底部)から液面までの半分の高さを求める。これにより、制御部13は、鍋2の半径と液面までの半分の高さとで構成される食物3の中心部の位置を取得することができる。
【0037】
同様にして、制御部13は、中心近傍温度センサの位置を求めることができる。制御部13は、傾き検出部11による傾斜角度と予め記憶された温度検出部10の先端から中心近傍温度センサまでの長さとから三角関数等により、中心近傍温度センサの鍋2内の位置を取得する。
【0038】
制御部13は、このようにして求めた食物3の中心部の位置に対する中心近傍温度センサの位置について、食物3の中心部からの距離及び方向に応じた補正量で、中心近傍温度センサの計測温度を補正して食物中心温度を算出してもよい。
【0039】
また、制御部13は、各温度センサ100により時々刻々と更新される温度分布が予め記憶された理想的な温度分布に近似したときに、計測中の温度分布に基づいて、中心近傍温度センサや縁近傍温度センサ、境近傍温度センサ等を特定してもよい。
【0040】
なお、制御部13は、処理を簡便にするために、食物3内に位置するすべての温度センサ100の計測温度が所定温度(必要加熱温度)に達すると、食物中心温度が所定温度(必要加熱温度)であるものとして、不図示のタイマーをスタートさせてもよい。この場合、制御部13は、不図示のタイマーによるカウントダウンの計測時間を必要加熱時間よりも長めに設定するとよい。
【0041】
また、制御部13は、傾き検出部11により検出される傾斜角度について、最も高頻度に(且つ、長時間)取得した傾斜角度を、調理器具1が計測状態として安定してセットされている状態、すなわち、調理器具1が鍋の縁に安定して立て掛けられた状態の傾斜角度と判定し、この傾斜角度を設定傾斜角度として取得する。なお、制御部13は、この設定傾斜角度を中心とする所定範囲内の角度を設定傾斜角度としてもよい。制御部13は、傾き検出部11から傾斜角度を取得する度に、又は不図示の記憶部に蓄積された傾斜角度に基づいて所定時間毎に、動的に設定傾斜角度を取得し直す。そのため、例えば、初めは調理器具1の先端が鍋2の隅に届いておらず、鍋2の底に接しつつ鍋2の縁に立て掛けられた状態の傾斜角度が設定傾斜角度として取得されていても、調理器具1の自重等で調理器具1が動いて先端が鍋2の隅に届き、鍋2の隅に接しつつ鍋2の縁に立て掛けられた状態で安定すれば、その傾斜角度が設定傾斜角度として動的に取得される。
【0042】
そして、制御部13は、傾き検出部11により検出される傾斜角度が設定傾斜角度である時に、各温度センサ100によりセンシングされる温度を計測温度として取得する。この場合、制御部13は、傾き検出部11により検出される傾斜角度が設定傾斜角度でなければ、温度センサ100によりセンシングされる温度を計測温度として利用しない。これによれば、例えば、対流によって調理器具1が動いたり、利用者によって調理器具1が動かされたりしている間に、温度センサ100によりセンシングされる温度を計測値から除外することができる。また、この場合、制御部13は、例えば対流等により調理器具1が動いて計測が正確に行えないことを、表示部15や報知部16により利用者に知らせて、調理器具1をセットし直すよう促してもよい。つまり、制御部13は、食中毒防止調理支援処理を開始してから、傾き検出部11を介して設定傾斜角度でない傾斜角度を取得すると、食中毒防止調理支援処理を中止して、傾き検出部11による傾斜角度が設定傾斜角度になるのを待って、再び食中毒防止調理支援処理を最初からやり直すことになる。
【0043】
ただし、制御部13は、傾斜角度が設定傾斜角度でなかったときの時間が短時間であれば、食中毒防止調理支援処理を中止しなくてもよい。この場合、制御部13は、傾き検出部11による傾斜角度が設定傾斜角度でない間の前後であって、傾斜角度が設定傾斜角度である場合の温度センサ100の温度分布に基づいて、傾斜角度が設定傾斜角度でない間の温度センサ100の温度分布を線形補完する、又は前後いずれかの計測温度と同じ温度であるものとして、継続的に温度維持がされたものとして取り扱ってもよい。また、制御部13は、算出した食物中心温度が所定温度に達して、不図示のタイマーによるカウントダウンを行っている場合に、傾き検出部11から設定傾斜角度でない傾斜角度を取得したときは、不図示のタイマーによるカウントダウンを中止せずに継続させてもよい。この場合、制御部13は、再び傾き検出部11による傾斜角度が設定傾斜角度に落ち着いたときに、改めて食物中心温度を算出し、食物中心温度が所定温度以上であることを条件に、継続している不図示のタイマーのカウントダウン状態から食中毒防止調理支援処理を継続すればよい。
【0044】
また、制御部13は、不図示のタイマーによるカウントダウンが終了してから所定時間(例えば15分等)経過しても温度センサ100の計測温度が低下しない場合、加熱し過ぎである旨を表示部15や報知部16に報知させてもよい。また、制御部13は、不図示のタイマーによるカウントダウンが終了してから所定時間経過して、温度センサ100の計測温度が低下した場合に、温度センサ100の計測温度が低下してから第2の所定時間経過したときの計測温度が所定温度以上であるときに、食物3が放置されている旨を表示部15や報知部16に報知させてもよい。なぜなら、例えば、カレー等の煮込み料理におけるウェルシュ菌は、耐熱性が高く15℃〜40℃で増殖することが知られている。そのため、せっかく食中毒を防止するための加熱調理を行っても、調理後の食物3の放置時間が長くなると、何らかの原因で残存していた菌や後から付着した菌が増殖し始めるからである。
【0045】
また、調理器具1は、ゼーベック効果を利用した熱電対により発電を行う電源部を備えていてもよい。具体的には、電源部は、加熱中の調理器具1内において温度差が生じる箇所に接するように設けられ、ゼーベック効果により発電した電力を電源として調理器具1の各部に供給している。例えば、電源部は、互いに接合された素材の異なる二種類の金属線で構成されてもよい。電源部は、互いに接合された金属線の接合点の一方が、調理器具1内で最も高温となるプローブ部1aの先端に取り付けられ、他方が、プローブ部1aの先端よりも低温となるプローブ部1aの根元部分(持ち手部1bとプローブ部1aとの境目部分)又は持ち手部1bに取り付けられている。調理器具1が挿入された食物3が加熱されると、接合点間の温度差によって起電力が生じるので、電源部は、その電力を取り出して電源として各部に供給を行う。
【0046】
つまり、調理器具1が挿入された食物3が加熱されると、自動的に電源部が発電して電源がONとなり、各部に電力が供給されて制御部13による食中毒防止調理支援処理が開始される。このようなエネルギー・ハーベスティング技術により、電池交換のための蓋を設けたり、外部電源によるバッテリー充電のための端子を露出させたりせずに済むので、持ち手部1bまで含めて調理器具1全体を密封して完全防水とすることができる。そのため、調理器具1が、濡れる環境で使用されても、漏水等を気にすることなく使用することができ、また、電池交換不要なためメンテナンスフリーとすることができる。なお、電源部は、ボタン型電池や、リチウムイオン電池等の充電可能な蓄電池により構成されていてもよい。この場合、電源部は、ゼーベック効果を利用して蓄電池に充電を行ってもよい。
【0047】
以上に説明した調理器具1は、他の調理器具に実装されてもよい。例えば、図6(a)は、調理器具がお玉杓子である場合の一例であり、図6(b)は、調理器具がヘラである場合の一例であり、図6(c)は、調理器具が菜箸である場合の一例である。なお、図6(c)に示す菜箸は、持ち手部1bがユニバーサルデザインに対応したものを示している。
【0048】
このように、一般的によく使用される調理器具に本実施形態を適用することで、利用者は、普段の調理作業の中で食中毒を防止する調理を行いやすくなる。なお、この場合、食物中心温度を算出する際の処理において、調理器具の形状及び使用形態に合わせて、傾斜角度や調理器具の先端から各温度センサ100までの長さ等の値が、適宜補正されることは言うまでもない。
【0049】
また、上記実施形態では、一例として、調理器具1を液体状の食物3内に挿入し、中心温度を計測する構成を説明したが、調理器具1を固形状の食物3内に突き刺して中心温度を計測することもできる。例えば、図7に示すように、ハンバーグ等の固形状の食物3内に調理器具1が挿入されてもよい。また、この場合、利用者は、例えば、操作部16を介して、「突き刺しモード」で計測する旨を選択した後に、調理器具1による食中毒防止調理支援処理を開始させてもよい。制御部13は、「突き刺しモード」が選択された場合、固形状の食物3内の温度と大気中の温度との温度差により、温度センサ100の温度分布に基づいて境近傍温度センサを特定する。そして、制御部13は、温度センサ100−1から境近傍温度センサまでの温度分布に基づいて、固形状の食物3全体の中心温度を推定すればよい。また、調理器具1は、固体状の食物3に突き刺された際に、その先端が固体状の食物3を突き抜けてもよい。この場合、制御部13は、固形状の食物3内の温度と大気中の温度との温度差により、温度センサ100による温度分布に基づいて、固形状の食物3における先端側の境近傍温度センサと持ち手部1b側の境近傍温度センサとの二箇所の境近傍温度センサを特定する。そして、制御部13は、その二箇所の境近傍温度センサ間の温度分布に基づいて、固形状の食物3全体の中心温度を推定すればよい。
【0050】
また、調理器具1による計測情報は、外部に蓄積されるようにしてもよい。蓄積された計測情報は、例えば他の計測機器による計測情報とともに総合的に解析され、表示部15や別途設けられたモニタ等に各種の情報として表示される。図8は、調理器具1を用いたシステムの構成を示す機能ブロック図である。ここでは、上記実施形態と同様の構成には同一の符号を付し、説明を省略する。
【0051】
調理器具1には、新たに通信部17が設けられている。A/D変換部12と制御部13と通信部17とは、1つのICチップで構成されてもよい。制御部13は、A/D変換部12を介して取得した傾き検出部11による傾斜角度及び温度検出部10による計測温度や、算出した食物中心温度等で構成される計測情報と、調理器具1を識別可能な識別IDとを、通信部17を介して、サーバ30に送信する。通信部17は、例えばZigBee(登録商標)等による無線通信によって、計測情報等をサーバ30に送信してもよい。
【0052】
サーバ30は、通信部301と計測情報DB302と解析部303とを備えている。サーバ30は、例えばクラウドサーバ30等で構成されてもよい。通信部301は、調理器具1から送信された計測情報と識別IDとを取得すると、識別IDに対応付けて計測情報を計測情報DB302に蓄積する。解析部303は、計測情報DB302に蓄積された計測情報に基づいて、食中毒を防止するために適切な加熱調理がなされているか等を解析し、解析結果を通信部301を介して表示部40に表示させる。解析部303は、通信部301を介して解析結果を表示部15に表示させてもよい。これによれば、例えば、過去の調理において、適切に食中毒を防止するための加熱処理がなされていたのか等を確認することができる。なお、調理器具1に記憶部を設け、この記憶部に調理器具1による計測情報を記憶させてもよい。この場合、制御部13は、操作部14の操作により記憶部に記憶された過去の計測情報に基づいて、表示部15に過去の調理において適切に食中毒を防止するための加熱処理がなされていたかを判定し、表示部15に表示させてもよい。
【0053】
本発明は上述した実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々様々に変更が可能であることは言うまでもない。なお、上記実施形態において、同様の機能を示す構成には、同一の符号を付してある。
【符号の説明】
【0054】
1:調理器具
1a:プローブ部
1b:持ち手部
1c:クリップ部
2:鍋
3:食物
10:温度検出部
100(100−1、100−2、・・・、100−n):温度センサ
11:傾き検出部
12:A/D変換部
13:制御部
14:操作部
15、40:表示部
16:報知部
17、301:通信部
30:サーバ
302:計測情報DB
303:解析部
【特許請求の範囲】
【請求項1】
間隔を介して設けられた、複数の温度センサを備えた調理器具であって、
前記各温度センサによる温度分布に基づいて食物中心温度を算出する中心温度算出手段と
を備えたことを特徴とする調理器具。
【請求項2】
前記中心温度算出手段は、
複数の前記温度センサによる温度分布に基づいて、食物と大気との境の最も近くに位置する境近傍温度センサを前記複数の温度センサの中から特定する境近傍温度センサ特定手段とを有し、
先端の前記温度センサから前記境近傍温度センサまでの複数の前記温度センサによる温度分布に基づいて食物中心温度を算出する
ことを特徴とする請求項1に記載の調理器具。
【請求項3】
前記複数の温度センサの重力方向に対する傾斜角度を検出する傾き検出手段とを備え、
前記中心温度算出手段は、
複数の前記温度センサによる温度分布に基づいて、前記食物を収容した収容器の縁の最も近くに位置する縁近傍温度センサを前記複数の温度センサの中から特定する縁近傍温度センサ特定手段と、
複数の前記温度センサによる温度分布に基づいて、食物と大気との境の最も近くに位置する境近傍温度センサを前記複数の温度センサの中から特定する境近傍温度センサ特定手段と、
予め記憶された前記複数の温度センサを有する温度検出手段の先端から前記縁近傍温度センサまでの長さと前記傾斜角度と、予め記憶された前記温度検出手段の先端から前記境近傍温度センサまでの長さと前記傾斜角度とから食物中心位置を算出する食物中心位置算出手段と、
複数の前記温度センサによる温度分布に基づいて、食物の中心の最も近くに位置する中心近傍温度センサを前記複数の温度センサの中から特定する中心近傍温度センサ特定手段と、
予め記憶された前記温度検出手段の先端から前記中心近傍温度センサまでの長さと前記傾斜角度とから前記中心近傍温度センサの前記食物内の位置を算出する中心近傍温度センサ位置算出手段とを有し、
前記食物中心位置からの距離に応じて予め設定された補正量で前記中心近傍温度センサの計測温度を補正して食物中心温度を算出する
ことを特徴とする請求項1又は2に記載の調理器具。
【請求項4】
前記傾き検出手段によって検出される前記傾斜角度について、最も高頻度に取得する前記傾斜角度を設定傾斜角度として取得する設定傾斜角度取得手段を備え、
前記中心温度算出手段は、
前記傾き検出手段によって検出された前記傾斜角度が前記設定傾斜角度と同一であるときに、複数の前記温度センサによる温度分布に基づいて食物中心温度を算出することを特徴とする請求項1から請求項3までのいずれか一項に記載の調理器具。
【請求項5】
前記温度検出手段の先端と該先端よりも低い温度を有する箇所との温度差によって発電する電源手段とを備えたことを特徴とする請求項1から請求項4までのいずれか一項に記載の調理器具。
【請求項6】
前記食物中心温度を表示する表示手段とを備えたことを特徴とする請求項1から請求項5までのいずれか一項に記載の調理器具。
【請求項7】
前記食物中心温度が所定温度に達してから所定時間経過したことを報知する報知手段とを備えたことを特徴とする請求項1から請求項6までのいずれか一項に記載の調理器具。
【請求項8】
間隔を介して設けられた、複数の温度センサを備えた調理器具と前記調理器具による計測温度を記憶するサーバとを備えた調理器具システムであって、
前記調理器具は、
前記各温度センサによる温度分布に基づいて食物中心温度を算出する中心温度算出手段と、
前記複数の温度センサによる計測温度を送信する通信部とを備え、
前記サーバは、
前記通信部から送信された前記計測温度を蓄積する計測情報記憶手段とを備えた
ことを特徴とする調理器具システム。
【請求項1】
間隔を介して設けられた、複数の温度センサを備えた調理器具であって、
前記各温度センサによる温度分布に基づいて食物中心温度を算出する中心温度算出手段と
を備えたことを特徴とする調理器具。
【請求項2】
前記中心温度算出手段は、
複数の前記温度センサによる温度分布に基づいて、食物と大気との境の最も近くに位置する境近傍温度センサを前記複数の温度センサの中から特定する境近傍温度センサ特定手段とを有し、
先端の前記温度センサから前記境近傍温度センサまでの複数の前記温度センサによる温度分布に基づいて食物中心温度を算出する
ことを特徴とする請求項1に記載の調理器具。
【請求項3】
前記複数の温度センサの重力方向に対する傾斜角度を検出する傾き検出手段とを備え、
前記中心温度算出手段は、
複数の前記温度センサによる温度分布に基づいて、前記食物を収容した収容器の縁の最も近くに位置する縁近傍温度センサを前記複数の温度センサの中から特定する縁近傍温度センサ特定手段と、
複数の前記温度センサによる温度分布に基づいて、食物と大気との境の最も近くに位置する境近傍温度センサを前記複数の温度センサの中から特定する境近傍温度センサ特定手段と、
予め記憶された前記複数の温度センサを有する温度検出手段の先端から前記縁近傍温度センサまでの長さと前記傾斜角度と、予め記憶された前記温度検出手段の先端から前記境近傍温度センサまでの長さと前記傾斜角度とから食物中心位置を算出する食物中心位置算出手段と、
複数の前記温度センサによる温度分布に基づいて、食物の中心の最も近くに位置する中心近傍温度センサを前記複数の温度センサの中から特定する中心近傍温度センサ特定手段と、
予め記憶された前記温度検出手段の先端から前記中心近傍温度センサまでの長さと前記傾斜角度とから前記中心近傍温度センサの前記食物内の位置を算出する中心近傍温度センサ位置算出手段とを有し、
前記食物中心位置からの距離に応じて予め設定された補正量で前記中心近傍温度センサの計測温度を補正して食物中心温度を算出する
ことを特徴とする請求項1又は2に記載の調理器具。
【請求項4】
前記傾き検出手段によって検出される前記傾斜角度について、最も高頻度に取得する前記傾斜角度を設定傾斜角度として取得する設定傾斜角度取得手段を備え、
前記中心温度算出手段は、
前記傾き検出手段によって検出された前記傾斜角度が前記設定傾斜角度と同一であるときに、複数の前記温度センサによる温度分布に基づいて食物中心温度を算出することを特徴とする請求項1から請求項3までのいずれか一項に記載の調理器具。
【請求項5】
前記温度検出手段の先端と該先端よりも低い温度を有する箇所との温度差によって発電する電源手段とを備えたことを特徴とする請求項1から請求項4までのいずれか一項に記載の調理器具。
【請求項6】
前記食物中心温度を表示する表示手段とを備えたことを特徴とする請求項1から請求項5までのいずれか一項に記載の調理器具。
【請求項7】
前記食物中心温度が所定温度に達してから所定時間経過したことを報知する報知手段とを備えたことを特徴とする請求項1から請求項6までのいずれか一項に記載の調理器具。
【請求項8】
間隔を介して設けられた、複数の温度センサを備えた調理器具と前記調理器具による計測温度を記憶するサーバとを備えた調理器具システムであって、
前記調理器具は、
前記各温度センサによる温度分布に基づいて食物中心温度を算出する中心温度算出手段と、
前記複数の温度センサによる計測温度を送信する通信部とを備え、
前記サーバは、
前記通信部から送信された前記計測温度を蓄積する計測情報記憶手段とを備えた
ことを特徴とする調理器具システム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−75032(P2013−75032A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−216695(P2011−216695)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【Fターム(参考)】
[ Back to top ]