
調理装置
【課題】蓋を閉じた状態における本体内の食品の検知精度の向上と、蓋を開いて備品をはずした状態における本体の安定的な設置とを両立した調理装置を提供することを目的としている。
【解決手段】重量検知脚13は、備品を本体1に取り付けて蓋2を閉じた状態における重心を通る垂直線である第1の垂線の足Xに対して、該第1の垂線の足Xに近い方から順に3番目までの少なくとも1つからなり、本体1の底面に設けられる脚50は、蓋2を開いた状態であって備品を本体1から取り外した状態における重心を通る垂直線である第2の垂線の足Yが、該第2の垂線の足Yに近い方から順に3番目までの脚50を結んで形成される三角形の内側となるように配置された。
【解決手段】重量検知脚13は、備品を本体1に取り付けて蓋2を閉じた状態における重心を通る垂直線である第1の垂線の足Xに対して、該第1の垂線の足Xに近い方から順に3番目までの少なくとも1つからなり、本体1の底面に設けられる脚50は、蓋2を開いた状態であって備品を本体1から取り外した状態における重心を通る垂直線である第2の垂線の足Yが、該第2の垂線の足Yに近い方から順に3番目までの脚50を結んで形成される三角形の内側となるように配置された。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、食品の重量を検知する重量検知センサを備えた調理装置に関するものである。
【背景技術】
【0002】
調理装置において、装置本体に入れた食品の量に応じて、温度や調理時間などを制御することによって、適切な調理を行ったり、美味しさを向上させたり、省エネを実現したりすることが求められている。たとえば、炊飯器においては、炊飯開始時の常温から、米に給水させる工程、沸騰工程、蒸らし工程などの間に、米全体を適切な温度・時間に維持することによって、炊き上がった際の食感や甘みが変化することが知られており、対象となる米の量に応じた入熱制御をすることが望ましい。
【0003】
そこで、炊飯器の釜に入れられた食品(米や水など)の重量を検知するためのセンサを釜の下部に設け、そのセンサの検出結果に基づいて入熱制御する調理装置が提案されている(たとえば、特許文献1)。
また、重量を検知するためのセンサを本体の脚部に設けた調理装置が提案されている(たとえば、特許文献2)。
さらに、重量を検知するためのセンサ脚を、本体下部に多角形に配置された支持脚で囲まれる領域内に配置した調理装置が提案されている(たとえば、特許文献3)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭59−20124号公報(たとえば、図1参照)
【特許文献2】実開昭63−37123号公報(たとえば、図1参照)
【特許文献3】特開2004−347452号公報(たとえば、図1及び図9参照)
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の技術は、調理装置の内部に、重量を検知するためのセンサを設けたものであるので、その分調理装置本体が大型化してしまっていた。
【0006】
特許文献2に記載の技術は、重量を検知するためのセンサを本体の脚部に設けたものであるが、調理装置の蓋の開閉などで変化する重心を考慮したものではなかった。これにより、蓋の開閉状態によっては、脚部のいずれかが浮き上がり、調理装置の設置状態が不安定となることがあった。さらに、その浮き上がった脚が、重量を検知するセンサに対応する脚部であった場合には、高精度に重量を検知することができなくなってしまっていた。
【0007】
特許文献3に記載の技術は、設置面の凹凸によって支持脚の一部が、センサ脚より下方に突出していると、センサ脚に加わる荷重が低下してしまい、測定精度が著しく低下することがあった。
【0008】
本発明は、上記のような課題の少なくとも1つを解決するためになされたもので、蓋を閉じた状態における本体内の食品の検知精度の向上と、蓋を開いて備品をはずした状態における本体の安定性の向上とを両立した調理装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
本発明に係る調理装置は、着脱自在に備品が収容される本体と、本体に開閉可能に設けられた蓋と、本体の底面に設けられる3つ以上の脚とを有し、脚のうち少なくとも1つが重量を検知するための重量検知脚である調理装置において、重量検知脚は、備品を本体に取り付けて蓋を閉じた状態における重心を通る垂直線である第1の垂線の足に対して、該第1の垂線の足に近い方から順に3番目までの少なくとも1つからなり、本体の底面に設けられる脚は、蓋を開いた状態であって備品を本体から取り外した状態における重心を通る垂直線である第2の垂線の足が、該第2の垂線の足に近い方から順に3番目までの脚を結んで形成される三角形の内側となるように配置されたものである。
【発明の効果】
【0010】
本発明に係る調理装置は、重量検知脚は、備品を本体に取り付けて蓋を閉じた状態における重心を通る垂直線である第1の垂線の足に対して、該第1の垂線の足に近い方から順に3番目までの少なくとも1つからなり、本体の底面に設けられる脚は、蓋を開いた状態であって備品を本体から取り外した状態における重心を通る垂直線である第2の垂線の足が、該第2の垂線の足に近い方から順に3番目までの脚を結んで形成される三角形の内側となるように配置されたものである。これにより、蓋を閉じた状態における本体内の食品の検知精度の向上と、蓋を開いて備品をはずした状態における本体の安定性の向上とを両立することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施の形態1に係る炊飯器の蓋を閉じた状態の模式図である。
【図2】図1に示す炊飯器の蓋を開いた状態の模式図である。
【図3】本発明の実施の形態1に係る炊飯器の脚の配置の一例について説明する図である。
【図4】本発明の実施の形態1に係る炊飯器の蓋を閉じた状態と開いた状態とにおける重心位置の移動について説明する図である。
【図5】本発明の実施の形態2に係る炊飯器のセンサ組込み脚の構成を説明する模式図である。
【図6】本発明の実施の形態3に係る炊飯器のセンサ組込み脚の位置について説明する模式図である。
【図7】本発明の実施の形態4に係る炊飯器のセンサ組込み脚の位置について説明する模式図である。
【図8】本発明の実施の形態5に係る炊飯器のセンサ組込み脚の位置について説明する模式図である。
【図9】本発明の実施の形態6に係る炊飯器のセンサ組込み脚の位置について説明する模式図である。
【図10】本発明の実施の形態7に係る調理装置のセンサ組込み脚の位置について説明する模式図である。
【図11】本発明の実施の形態7に係る調理装置のセンサ組込み脚の位置について説明する模式図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態を図面に基づいて説明する。
実施の形態1.
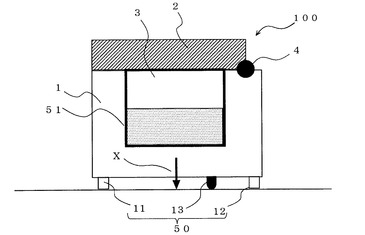
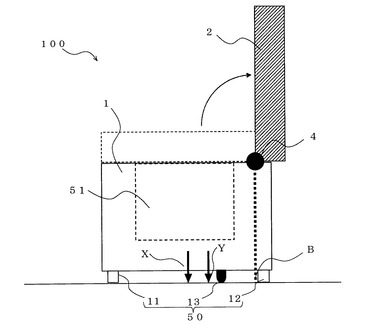
図1は、本発明の実施の形態1に係る炊飯器100の蓋2を閉じた状態の模式図である。図2は、図1に示す炊飯器100の蓋2を開いた状態の模式図である。この炊飯器100は、調理装置の一例である。
なお、図1において釜3に食品が入っている状態を図示しており、図2において蓋2を開くとともに、釜3などの備品を外した状態を示している。また、図1に図示される蓋2を開き、釜3などの備品を取り外すことで重心が移動する。
さらに、以下の説明において、炊飯器100の重心位置のうち水平面上における位置を表すために、重心から垂直に降ろした線を、垂線の足と称するものとする。たとえば、図1及び図2を参照すると、重心の位置が移動することで、垂線の足X(図1)から垂線の足Y(図2)に対応する位置に移動する。また、以下の説明において、後述の後脚12から前脚11に向かう方向を前方向とし、前脚11から後脚12に向かう方向を後方向とする。さらに、ある位置を通る左右方向の直線より前方向を前側とし、ある位置を通る左右方向の直線より後方向を後側とする。
本実施の形態1に係る炊飯器100には、炊飯器内の食品などの重量を検知する重量検知センサが設けられたセンサ組込み脚13(重量検知脚)が設けられており、炊飯器100内の食品の検知精度の向上と、載置される炊飯器の安定性の向上とを両立をする改良がなされている。
【0013】
[炊飯器100の構成]
図1及び図2に示すように、炊飯器100は、本体1、開閉する蓋2、蓋2を本体1に開閉自在に取り付ける蓋開閉ヒンジ4、調理する食品(たとえば米や水)を入れる釜3、調理のための制御をする制御装置(図示省略)、及び本体1を支持する脚50を有している。
本体1は、炊飯器100の外郭の側面及び底面を構成しており、釜3などの備品を収容可能なものである。そして、本体1の底面には、炊飯器100を支持する脚50が設けられている。また、本体1の上部には、蓋開閉ヒンジ4を介して蓋2が開閉自在に設けられている。
なお、図1及び図2において、本体1の形状は、釜3を設置するための凹部51が形成された縦断面略長方形形状であるものを図示しているが、これに限定されるものではない。さらに、図1及び図2において、本体1の底面は、平面形状となっているものを図示しているが、これに限定されるものではない。本体1の底面は、たとえば曲面などが形成されていてもよいし、波状などでもよい。
【0014】
蓋2は、釜3を設置するための凹部51を開放又は閉塞するものである。なお、図1及び図2において、蓋2の形状は、縦断面略長方形形状であるものを図示しているが、これに限定されるものではない。蓋2は、蓋開閉ヒンジ4を介して、開閉自在に本体1の上部に設けられている。
釜3(備品)は、米や水などの食品を入れるための容器であり、本体1から着脱自在のものである。なお、図1及び図2において、釜3の形状は、略凹形状となっているが、これに限定されるものではなく、たとえば凹部51に対応する形状などとするとよい。
蓋開閉ヒンジ4は、蓋2を本体1に開閉自在に接続するものである。この蓋開閉ヒンジ4は、本体1の上面の端部に設けられている。なお、図1及び図2において、蓋開閉ヒンジ4は、本体1の上面の端部に設けられているものを図示しているが、これに限定されるものではない。
制御装置は、ユーザーが設定する情報(たとえば、炊飯、保温など)に基づいて、釜3に入れられた食品を調理するために、各種機器(たとえば、コイルなど)を制御するものである。また、調理中において制御装置は、センサ組込み脚13が検知する食品の重量の検出結果に基づいて各種機器を制御するようになっている。たとえば、炊飯器100が電磁誘導加熱用の加熱コイルを有してるタイプのものであれば、制御装置はこの加熱コイルに供給する電流を制御して食品を調理する。
【0015】
脚50は、本体1の底面に設けられた炊飯器100を支持する脚であり、それぞれの脚50が設置面との接触点を有している。脚50は、炊飯器100を支持する前脚11及び後脚12と、釜3に入れられた食品の重量などを検知する機能を有するセンサ組込み脚13を有している。
前脚11は、蓋開閉ヒンジ4から離れた側の下部に設けた脚である。具体的には、本実施の形態1に係る炊飯器100の前脚11は、転倒しないように、垂線の足X(第1の垂線の足X)より前側に配置されるものとする。
後脚12は、蓋開閉ヒンジ4に近い側の下部に設けた脚である。具体的には、本実施の形態1に係る炊飯器100の後脚12は、転倒しないように、垂線の足Y(第2の垂線の足Y)より外側であって蓋開閉ヒンジ4の垂線の足Bよりも後側(外縁部)に配置されるものとする。
なお、図1及び図2では、脚50に前脚11及び後脚12が設けられた例を図示したが、詳細な脚50の配置については後述の[脚50の配置について]で詳しく記載するものとする。
【0016】
センサ組込み脚13は、炊飯器100を支持するとともに、釜3に入れられた食品や後述の水タンク5内の水の重量を検知する脚である。センサ組込み脚13が重量を検知する機構は、センサ組込み脚13にたとえば圧電素子で構成した重量検知センサを設けた構成などとするとよい。
なお、製造誤差や本体1の下部部品の歪みなどがあると、前脚11、後脚12あるいは他の底面部分が設置面に当たり、センサ組込み脚13が設置面に対して浮いてしまう場合がある。これにより、センサ組込み脚13の重量検知精度が低下してしまう場合ある。そこで、センサ組込み脚13は、前脚11、後脚12あるいは他の底面部分の下端よりも、下方に突出して設けられているのが好ましい。
【0017】
[脚50の配置について]
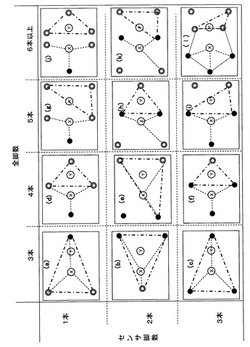
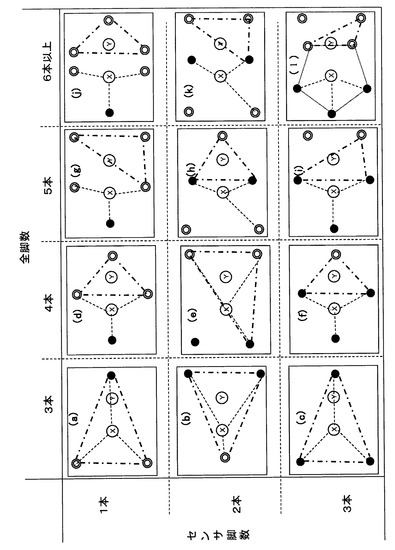
図3は、本発明の実施の形態1に係る炊飯器100の脚50の配置の一例について説明する図である。この図3では、垂線の足X及び垂線の足Yに対する、センサ組込み脚13及びセンサ組込み脚13以外の脚50の配置の一例について説明する。なお、図3では、センサ組込み脚13を含めた全脚数に対して、センサ組込み脚13の数を1〜3つまで変化させたときの脚50の配置例を示している。また、図3に図示される二重丸は、センサ組込み脚13でない脚50に対応し、黒丸がセンサ組込み脚13に対応する。
【0018】
本実施の形態1に係る炊飯器100の脚50の全脚数は3以上であり、その脚50のうちの少なくとも1つがセンサ組込み脚13である。そして、以下に説明する条件1、2を満たすように脚50が配置されている。なお、図3(a)〜図3(l)は、条件1、2を満たす脚50の配置の一例を具体的に示したものである。
(条件1)脚50のうち垂線の足Xに近い方から順に3番目までの脚50の少なくとも1つを、センサ組込み脚13とする。
(条件2)脚50のうち垂線の足Yに近い方から順に3番目までの脚50を結んで形成される三角形が、垂線の足Yを囲むように、3つの脚50を配置する。つまり、これらの3つの脚50の内側に垂線の足Yがくるように、3つの脚50を配置するということである。
(条件3)センサ組込み脚13を、垂線の足Xと垂線の足Yとを結ぶ線分上以外に設ける。
【0019】
[炊飯器100の有する効果]
(条件1)より、蓋2が閉じている状態において、脚50のうち垂線の足Xに近い方から順に3番目までの脚50が、センサ組込み脚13となる。つまり、蓋2が閉じている状態において、これに加重が加わる3つの脚の少なくとも1つがセンサ組込み脚13となるので、高精度に釜3内の食品の重量を検知することができる。
【0020】
また、(条件2)より、蓋2が開いており、釜3などの備品が取り外された状態において、脚50のうち垂線の足Yに近い方から順に3番目までの脚50を結んで形成される三角形が、垂線の足Yを囲むように、3つの脚50が配置される。つまり、蓋2を開くとともに、釜3などの備品が取り外された状態における垂線の足Yが、この三角形に囲まれるので、炊飯器100の安定性を向上させることができる。なお、図2において、蓋2を開くとともに、釜3などの備品をはずした状態を図示したのは、蓋2を閉じた状態における垂線の足Xからの移動量を最大とし、一番不安定になる状態でも、安定性を確保させるためである。
【0021】
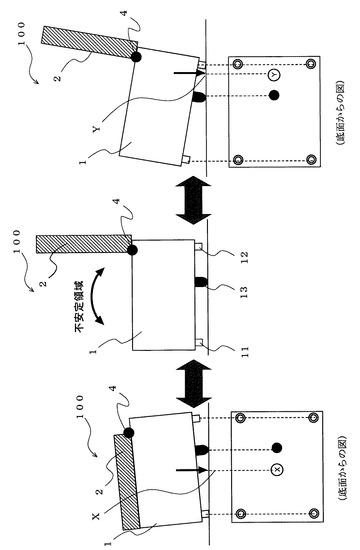
また、(条件3)より、センサ組込み脚13が、垂線の足Xと垂線の足Yとを結ぶ線分上以外にあるため、蓋2の開閉の過渡期に、センサ組込み脚13に全荷重が加わった不安定状態(図4中央)に陥ることがなく、センサ組込み脚13を中心に回転して突然向きが変わってしまうことを回避することができる。
【0022】
このように、本実施の形態1に係る炊飯器100は、上記(条件1)及び(条件2)を満たすように脚50が配置されているので、蓋2を閉じた状態における炊飯器100内の食品の検知精度の向上と、蓋2を開いて釜3などの備品をはずした状態における炊飯器100の安定性の向上とを、両立することができる。
【0023】
ここで、図4は、本発明の実施の形態1に係る炊飯器100の蓋2を閉じた状態と開いた状態とにおける重心位置の移動について説明する図である。本実施の形態1に係る炊飯器100は、(条件1)及び(条件2)を満たすように脚50が配置されているので、蓋2が閉じた状態においても、開いた状態においても脚50によって炊飯器100が支持される。これにより、蓋2の開閉時に重心が移動する過渡状態の際に、たとえば図4の中央に図示されるような不安定な状態(不安定領域)のままとなってしまうことが抑制されるので、炊飯器100の安定性を向上させることができる。
【0024】
実施の形態2.
図5は、本発明の実施の形態2に係る炊飯器100Aのセンサ組込み脚13Aの構成を説明する模式図である。なお、本実施の形態2では、実施の形態1と同一部分には同一符号とし、実施の形態1との相違点を中心に説明するものとする。
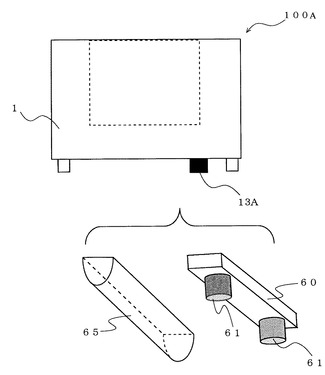
センサ組込み脚13Aは、図5に示すように、棒状部品60に2箇所の下方に突出した脚61を設けて構成してもよい。つまり、棒状部品60のたとえば中央部に重量検知センサを設けて、2つの脚61と重量検知センサとを棒状部品60を介して機械的に接続する構成としてもよい。これにより、1つの重量検知センサで、2つの脚61に加わる荷重が検知できる。なお、図5では、脚61の数が2つである場合を図示したが、これに限定されるものではない。
さらに、センサ組込み脚13Aは、図5に示すように、断面形状が略半楕円形状の棒状部品65などとしてもよい。この棒状部品65の接地面は、脚50と比較すると広くなっている。そして、重量検知センサは、棒状部品65のたとえば中央部に設けるとよい。
【0025】
実施の形態2に係る炊飯器100Aは、上記(条件1)及び(条件2)を満たすことに加えて、センサ組込み脚13Aを、棒状部品60の下方に突出した脚61を2つ以上設けて構成する。これにより、1つの重量検知センサで2つ以上の脚61を、重量検知のための脚として機能させることができる。
あるいは、実施の形態2に係る炊飯器100Aは、上記(条件1)及び(条件2)を満たすことに加えて、センサ組込み脚13Aを断面形状が略半楕円形状の棒状部品65などで構成する。これにより、1つの重量検知センサで重量を検知する脚を複数設置することに対応する機能を得ることができる。
つまり、実施の形態2に係る炊飯器100Aは、実施の形態1に係る炊飯器100の有する効果に加えて、重量検知センサの数を減らすことができる分、部品点数を少なくするとともに部品の容積を減らすことができるので、炊飯器100Aの大型化を抑制することができる。
【0026】
実施の形態3.
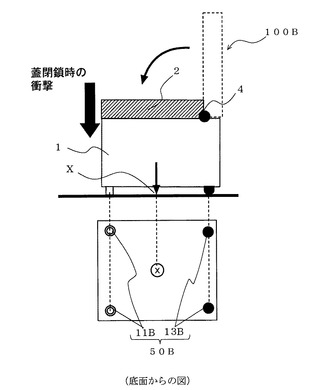
図6は、本発明の実施の形態3に係る炊飯器100Bのセンサ組込み脚13Bの位置について説明する模式図である。なお、図6では、前脚11Bが2つ設けられ、後脚としてのセンサ組込み脚13Bが2つ設けられた例を図示している。また、本実施の形態3では、実施の形態1、2と同一部分には同一符号とし、実施の形態1、2との相違点を中心に説明するものとする。
【0027】
図6に図示されるように、開いた状態の蓋2に勢いをつけて閉めると、蓋2の前側の速度が上がって本体1に接触する。あるいは、開いた上体の蓋2に勢いをつけて閉めなくても、ユーザーは、蓋2を完全に閉めるために蓋2の前側を押し込むことが想定される。これにより、蓋2の前側に対応する位置(蓋2の前側の下方)に配置された前脚11Bに、特に強い衝撃(過荷重)が伝達されることになる。仮に、この蓋2の前側に対応する位置にセンサ組込み脚13Bが配置されていた場合には、その衝撃によって、センサ組込み脚13Bの重量検知センサが壊れてしまったり、重量検知センサを固定する持具などを損傷してしまったりする可能性がある。
【0028】
そこで、本実施の形態3に係る炊飯器100Bは、上記(条件1)及び(条件2)を満たすことに加えて、センサ組込み脚13Bを、蓋開閉ヒンジ4に対応する位置(蓋開閉ヒンジ4の下方近傍)に配置する。これにより、蓋2を閉める際における、センサ組込み脚13Bに加わる衝撃を抑制することができる。
つまり、本実施の形態3に係る炊飯器100Bは、実施の形態1に係る炊飯器100の有する効果に加えて、センサ組込み脚13Bへの過荷重による重量検知センサの故障や、重量検知センサを固定する持具への損傷を抑制することができるので、安定して長寿命な炊飯器100Bを提供することができる。
なお、実施の形態3に係る炊飯器100Bの脚50Bの配置としては、図3における(a)(b)(h)(k)の配置が該当する。
【0029】
実施の形態4.
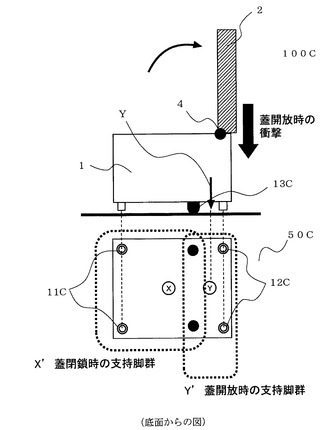
図7は、本発明の実施の形態4に係る炊飯器100Cのセンサ組込み脚13Cの位置について説明する模式図である。図7では、前脚11Cが2つ設けられ、後脚12Cが2つ設けられ、さらに、垂線の足Xよりも後側で垂線の足Yよりも前側にセンサ組込み脚13Cが2つ設けられた例を図示している。なお、図7に図示されるセンサ組込み脚13Cは、後脚12Cと垂線の足Xとの間のうち、垂線の足Xよりとなるように配置されている。本実施の形態4では、実施の形態1〜3と同一部分には同一符号とし、実施の形態1〜3との相違点を中心に説明するものとする。
【0030】
図7に図示されるように、蓋2を開ける作用により蓋開閉ヒンジ4及び本体1を介して、衝撃が蓋開閉ヒンジ4の下方に伝達される可能性がある。これにより、蓋開閉ヒンジ4に対応する位置(蓋開閉ヒンジ4の下方)に配置された後脚12Cに、特に強い衝撃が伝達されることになる。仮に、この蓋開閉ヒンジ4に対応する位置にセンサ組込み脚13Cが配置されていた場合には、その衝撃によって、センサ組込み脚13Cの重量検知センサが壊れてしまったり、重量検知センサを固定する持具などを損傷してしまったりする可能性がある。
また、実施の形態3にて説明したように、蓋2を閉める作用により、蓋2の前側に対応する位置(蓋2の前側の下方)に配置された脚50Cほど、強い衝撃が伝達される。
【0031】
そこで、本実施の形態4に係る炊飯器100Cは、上記(条件1)及び(条件2)に加えて、センサ組込み脚13Cを、後脚12Cと垂線の足Xとの間のうち、垂線の足Xよりとなるように配置する。つまり、センサ組込み脚13Cを、蓋開閉ヒンジ4に対応する位置、及び蓋2の前側に対応する位置から離れた位置に、センサ組込み脚13Cを配置するということである。これにより、蓋2を閉める際及び蓋2を開ける際の双方において、センサ組込み脚13Cに加わる衝撃を抑制することができる。
つまり、本実施の形態4に係る炊飯器100Cは、実施の形態1に係る炊飯器100の有する効果に加えて、センサ組込み脚13Cへの過荷重による重量検知センサの故障や、重量検知センサを固定する持具への損傷を抑制することができるので、安定して長寿命な炊飯器100Cを提供することができる。
なお、実施の形態4に係る炊飯器100Cの脚50Cの配置としては、図3における(k)の配置が該当する。
【0032】
ここで、たとえば蓋2を閉める際の衝撃を特に抑制したい場合には、実施の形態3に係る炊飯器100Bの脚50Bの配置を採用し、蓋2を閉める際と開ける際の両方の衝撃を抑制したい場合には、本実施の形態3に係る炊飯器100Cの脚50Cの配置を採用するなどすればよい。
【0033】
さらに、図7では、前脚11Cが2つ設けられ、後脚12Cが2つ設けられ、さらに、垂線の足Xよりも後側で垂線の足Yよりも前側にセンサ組込み脚13Cが2つ設けられた例を図示しているがこの配置は、以下のように一般化することができる。
すなわち、脚50Cは少なくとも4本以上から構成され、少なくとも1つの脚50Cが垂線の足Xより前側に配置され、少なくとも1つの脚50Cが垂線の足Yより後側に配置され、さらに、垂線の足Xの後側から垂線の足Yの前側の間にセンサ組込み脚13Cが少なくとも1つ配置されるということである。
【0034】
これにより、蓋2の閉じた状態であって釜3を本体1に取り付けた状態と、蓋2を開いた状態であって釜3を本体1から取り外した状態とでは、設置面に接触する脚50Cが少なくとも1つ異なることになる。なお、先述の炊飯器100の構成で示したように、センサ組込み脚13Cは、どの脚50Cよりも下方に突出しているものとする。
つまり、図7に図示されるように、蓋2の閉じた状態であって釜3を本体1に取り付けた状態ではX’に示す4つの脚50Cが炊飯器100Cを支持し、蓋2を開いた状態であって釜3を本体1から取り外した状態ではY’に示す4つの脚50Cが炊飯器100Cを支持するということである。
このように、重心の移動に応じて、炊飯器100Cを支持する脚50Cが異なるように脚50Cを配置することで、蓋2の閉じた状態であって釜3を本体1に取り付けた状態と、蓋2を開いた状態であって釜3を本体1から取り外した状態との双方で、炊飯器100Cの安定性を向上させることができる。
【0035】
実施の形態5.
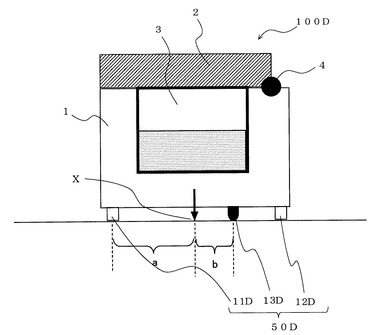
図8は、本発明の実施の形態5に係る炊飯器100Dのセンサ組込み脚13Dの位置について説明する模式図である。なお、図8に図示される前脚11Dは脚50Dのうち一番前側にある脚であるものとする。また、本実施の形態5では、実施の形態1〜4と同一部分には同一符号とし、実施の形態1〜4との相違点を中心に説明するものとする。
【0036】
本実施の形態5に係る炊飯器100Dは、上記(条件1)及び(条件2)を満たすことに加えて、センサ組込み脚13Dを、前脚11Dから垂線の足Xまでの距離をaとし、後脚から垂線の足Xまでの距離をbとしたときに、距離a>距離bを満たすように配置する。これにより、備品を取り付けて蓋2を閉じた状態において、常に荷重の1/2以上がセンサ組込み脚13Dに加わることになる。これにより、本実施の形態5に係る炊飯器100Dは、実施の形態1の炊飯器100の有する効果に加えて、釜3に入れられた食品の重量の検知精度を向上させることができる。
【0037】
ここで、炊飯器100Dの設置面に反りや傾きなどにより、炊飯器100Dが4つ以上の脚50Dではなく、3つの脚50Dで支持される場合がある。しかし、このような場合でも、本実施の形態5に係る炊飯器100Dは、センサ組込み脚13Dが距離a>距離bを満たすように配置されるので、センサ組込み脚13Dのいずれかが設置面に対して浮き上がってしまうことが抑制される。つまり、測定精度が低減してしまうことを抑制することができる。
【0038】
実施の形態6.
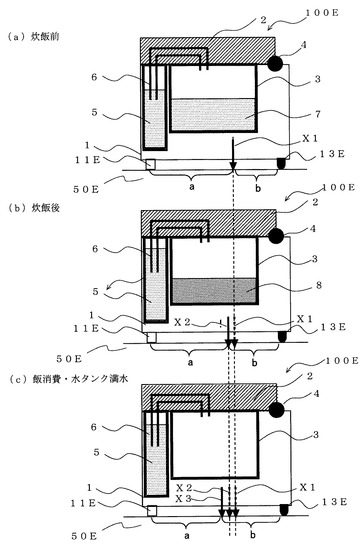
図9は、本発明の実施の形態6に係る炊飯器100Eのセンサ組込み脚13Eの位置について説明する模式図である。なお、図9では、後脚をセンサ組込み脚13Eとした場合を例として図示している。また、本実施の形態6では、実施の形態1〜5と同一部分には同一符号とし、実施の形態1〜5との相違点を中心に説明するものとする。
本実施の形態6に係る炊飯器100Eは、炊飯時の蒸気を炊飯器外部に漏出させない機能を有する炊飯器である。この本実施の形態6に係る炊飯器100Eには、釜3と嵌合して釜3の上部の空間を略閉塞する内蓋(図示省略)と、加熱時に釜3と内蓋とで形成される空間53で発生する蒸気の通路となるカートリッジ6と、空間53で発生する蒸気がカートリッジ6を介して送り込まれる水タンク5(備品)とを有している。
なお、内蓋及び水タンク5は、本体1から着脱可能(着脱自在)な備品である。また、図9では、水タンク5が、釜3に対して前側に配置されたものを一例として図示している。
【0039】
図9(a)は、炊飯器100Eが炊飯前の状態を図示している。すなわち、備品を全て取り付け、水タンク5に所定の水量を入れ、釜3には所定の米と水7を入れた状態である(これを状態1と呼ぶ)。このときの重心は、垂線の足X1(第3の垂線の足)に対応している。
図9(b)は、炊飯器100Eが炊飯後の状態を図示している。すなわち、備品は全て取り付け、水タンク5には炊飯中に発生した蒸気が復水されて増加した分だけ増加した水が貯留され、釜3には炊飯されたご飯8がある状態である(これを状態2と呼ぶ)。このときの重心は、垂線の足X2(第4の垂線の足)に対応している。
ここで、前脚11Eから垂線の足X1までの距離をaとし、センサ組込み脚13Eから垂線の足X1までの距離をbとする。同様に、前脚11Eから垂線の足X2までの距離をaとし、センサ組込み脚13Eから垂線の足X2までの距離をbとする。
【0040】
本実施の形態6に係る炊飯器100Eは、上記(条件1)及び(条件2)を満たすことに加えて、状態1及び状態2において距離a>距離bを満たすように前脚11E及びセンサ組込み脚13Eが配置されている。これにより、炊飯前だけでなく炊飯後においても、精度よく重量を検知することができる。
つまり、本実施の形態6に係る炊飯器100Eは、実施の形態1に係る炊飯器100の有する効果に加えて、炊飯前だけでなく炊飯後においても、精度よく重量を検知することができるということである。
【0041】
ここで、さらに望ましくは、蓋2は閉じた状態であってご飯8が消費された状態においても、距離a>距離bを満たすように、前脚11E及びセンサ組込み脚13Eが配置されているとよい。なお、このときの重心は、垂線の足X3に対応している。また、前脚11Eから垂線の足X3までの距離をaとし、センサ組込み脚13Eから垂線の足X3までの距離をbとする。これにより、炊飯後の水タンク5に貯留された水が増加した状態においても、脚50Eが距離a>距離bを満たすように配置することになるので、ご飯が消費された重量を精度よく検知することができる。つまり、ご飯の残量を表示したり、保温温度を適正に制御したりすることができる。
【0042】
また、水タンク5には、ユーザーが、炊飯前に発生する蒸気を復水させるために水を入れる必要があるが、この際に目安となる水位表示(水量を示す印)を設けるとよい。これにより、ユーザーは、より正確に水タンク5に水を入れることができる。ここで、水タンク5に入れる水の水量は、水位表示に合わせた目分量であり、誤差が生じる可能性がある。
しかし、本実施の形態6に係る炊飯器100Eは、上記(条件1)及び(条件2)を満たすように脚50Eが配置されるので、このような水量の誤差が存在していても、この誤差が重量検知センサに与える影響を小さくすることができる。つまり、釜に投入した米と水の重量を精度よく検知することができる。
【0043】
実施の形態7.
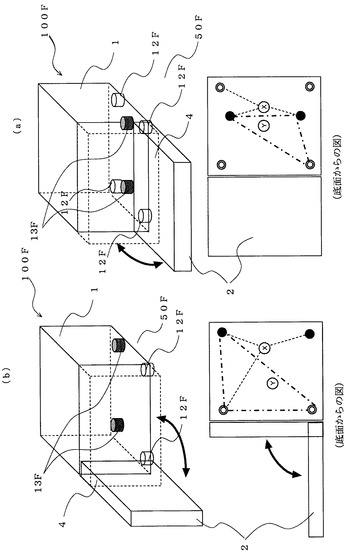
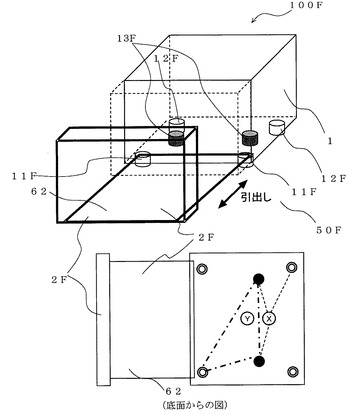
図10は、本発明の実施の形態7に係る調理装置100Fのセンサ組込み脚13Fの位置について説明する模式図である。図11は、本発明の実施の形態7に係る調理装置100Fのセンサ組込み脚13Fの位置について説明する模式図である。なお、本実施の形態7では、実施の形態1〜6と同一部分には同一符号とし、実施の形態1〜6との相違点を中心に説明するものとする。
実施の形態1〜6に係る炊飯器100、100A〜100Eにおいては、蓋2が本体1の略上面全体(略天面全体)を覆うように設けられ、蓋開閉ヒンジ4が上面の端部に設けられたものを一例として説明したが、このような形態に限定されるものではない。
つまり、図10(a)及び図10(b)に示すように、蓋2Fが調理装置100Fの前面に設けられていても、また、図10(a)に図示するように蓋開閉ヒンジ4Fが下端に設けられていても、図10(b)に図示するように正面側から見て左端に設けられていてもよい。このように、蓋開閉ヒンジ4Fに対して手前側下開き(図10(a))や手前側横開き(図10(b))である調理装置100Fについても、実施の形態1〜6で述べた脚50、50A〜50Eの配置を適用可能である。
【0044】
また、図11に示すように、調理装置100Fには、蓋開閉ヒンジ4Fが設けられていない構成としてもよい。つまり、蓋2Fと本体1とが蓋開閉ヒンジ4Fを介して接続される構成ではなく、蓋2Fの下部に引き出し可能な引出しトレイ62が設けられた構成としても、実施の形態1〜6で述べた脚50、50A〜50Eの配置を適用可能である。
【0045】
また、実施の形態1〜6では、調理装置として炊飯器を例に挙げてきたが、食材重量に応じた調理制御を行う装置であって、装置操作時に重心位置が変化するような調理装置であればどのような機器においても応用が可能である。具体的には、たとえば電子レンジ、魚焼きグリル、IH調理器、及び冷凍冷蔵庫に組み込まれる略独立した引き出しやケースにおいて冷却制御をする装置などに用いることができる。また、本実施の形態7に係る調理装置100Fも、たとえば電子レンジ、魚焼きグリル、IH調理器、及び冷凍冷蔵庫に組み込まれる略独立した引き出しやケースにおいて冷却制御をする装置などに適用可能である。
【0046】
本実施の形態1〜6に係る炊飯器100、100A〜100E及び実施の形態7に係る調理装置100Fは、本体1内の食品の重量の検知をセンサ組込み脚13、13A〜13Fで実施するものである。つまり、本体1の内部に、重量の検知をする機構のうちの全てを収納するのではないので、その分大型化を抑制することができる。なお、実施の形態1〜7に記載の内容は、適宜組み合わせてよいことは言うまでもない。
【符号の説明】
【0047】
1 本体、2、2F 蓋、3 釜、4、4F 蓋開閉ヒンジ、5 水タンク、6 カートリッジ、7 米と水、8 ご飯、11、11B〜11E 前脚、12、12C 後脚、13、13A〜13F センサ組込み脚、50、50B〜50E 脚、51 凹部、53 空間、60 棒状部品、61 脚、62 引出しトレイ、65 棒状部品、100、100A〜100E 炊飯器、100F 調理装置。
【技術分野】
【0001】
本発明は、食品の重量を検知する重量検知センサを備えた調理装置に関するものである。
【背景技術】
【0002】
調理装置において、装置本体に入れた食品の量に応じて、温度や調理時間などを制御することによって、適切な調理を行ったり、美味しさを向上させたり、省エネを実現したりすることが求められている。たとえば、炊飯器においては、炊飯開始時の常温から、米に給水させる工程、沸騰工程、蒸らし工程などの間に、米全体を適切な温度・時間に維持することによって、炊き上がった際の食感や甘みが変化することが知られており、対象となる米の量に応じた入熱制御をすることが望ましい。
【0003】
そこで、炊飯器の釜に入れられた食品(米や水など)の重量を検知するためのセンサを釜の下部に設け、そのセンサの検出結果に基づいて入熱制御する調理装置が提案されている(たとえば、特許文献1)。
また、重量を検知するためのセンサを本体の脚部に設けた調理装置が提案されている(たとえば、特許文献2)。
さらに、重量を検知するためのセンサ脚を、本体下部に多角形に配置された支持脚で囲まれる領域内に配置した調理装置が提案されている(たとえば、特許文献3)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭59−20124号公報(たとえば、図1参照)
【特許文献2】実開昭63−37123号公報(たとえば、図1参照)
【特許文献3】特開2004−347452号公報(たとえば、図1及び図9参照)
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の技術は、調理装置の内部に、重量を検知するためのセンサを設けたものであるので、その分調理装置本体が大型化してしまっていた。
【0006】
特許文献2に記載の技術は、重量を検知するためのセンサを本体の脚部に設けたものであるが、調理装置の蓋の開閉などで変化する重心を考慮したものではなかった。これにより、蓋の開閉状態によっては、脚部のいずれかが浮き上がり、調理装置の設置状態が不安定となることがあった。さらに、その浮き上がった脚が、重量を検知するセンサに対応する脚部であった場合には、高精度に重量を検知することができなくなってしまっていた。
【0007】
特許文献3に記載の技術は、設置面の凹凸によって支持脚の一部が、センサ脚より下方に突出していると、センサ脚に加わる荷重が低下してしまい、測定精度が著しく低下することがあった。
【0008】
本発明は、上記のような課題の少なくとも1つを解決するためになされたもので、蓋を閉じた状態における本体内の食品の検知精度の向上と、蓋を開いて備品をはずした状態における本体の安定性の向上とを両立した調理装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
本発明に係る調理装置は、着脱自在に備品が収容される本体と、本体に開閉可能に設けられた蓋と、本体の底面に設けられる3つ以上の脚とを有し、脚のうち少なくとも1つが重量を検知するための重量検知脚である調理装置において、重量検知脚は、備品を本体に取り付けて蓋を閉じた状態における重心を通る垂直線である第1の垂線の足に対して、該第1の垂線の足に近い方から順に3番目までの少なくとも1つからなり、本体の底面に設けられる脚は、蓋を開いた状態であって備品を本体から取り外した状態における重心を通る垂直線である第2の垂線の足が、該第2の垂線の足に近い方から順に3番目までの脚を結んで形成される三角形の内側となるように配置されたものである。
【発明の効果】
【0010】
本発明に係る調理装置は、重量検知脚は、備品を本体に取り付けて蓋を閉じた状態における重心を通る垂直線である第1の垂線の足に対して、該第1の垂線の足に近い方から順に3番目までの少なくとも1つからなり、本体の底面に設けられる脚は、蓋を開いた状態であって備品を本体から取り外した状態における重心を通る垂直線である第2の垂線の足が、該第2の垂線の足に近い方から順に3番目までの脚を結んで形成される三角形の内側となるように配置されたものである。これにより、蓋を閉じた状態における本体内の食品の検知精度の向上と、蓋を開いて備品をはずした状態における本体の安定性の向上とを両立することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施の形態1に係る炊飯器の蓋を閉じた状態の模式図である。
【図2】図1に示す炊飯器の蓋を開いた状態の模式図である。
【図3】本発明の実施の形態1に係る炊飯器の脚の配置の一例について説明する図である。
【図4】本発明の実施の形態1に係る炊飯器の蓋を閉じた状態と開いた状態とにおける重心位置の移動について説明する図である。
【図5】本発明の実施の形態2に係る炊飯器のセンサ組込み脚の構成を説明する模式図である。
【図6】本発明の実施の形態3に係る炊飯器のセンサ組込み脚の位置について説明する模式図である。
【図7】本発明の実施の形態4に係る炊飯器のセンサ組込み脚の位置について説明する模式図である。
【図8】本発明の実施の形態5に係る炊飯器のセンサ組込み脚の位置について説明する模式図である。
【図9】本発明の実施の形態6に係る炊飯器のセンサ組込み脚の位置について説明する模式図である。
【図10】本発明の実施の形態7に係る調理装置のセンサ組込み脚の位置について説明する模式図である。
【図11】本発明の実施の形態7に係る調理装置のセンサ組込み脚の位置について説明する模式図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態を図面に基づいて説明する。
実施の形態1.
図1は、本発明の実施の形態1に係る炊飯器100の蓋2を閉じた状態の模式図である。図2は、図1に示す炊飯器100の蓋2を開いた状態の模式図である。この炊飯器100は、調理装置の一例である。
なお、図1において釜3に食品が入っている状態を図示しており、図2において蓋2を開くとともに、釜3などの備品を外した状態を示している。また、図1に図示される蓋2を開き、釜3などの備品を取り外すことで重心が移動する。
さらに、以下の説明において、炊飯器100の重心位置のうち水平面上における位置を表すために、重心から垂直に降ろした線を、垂線の足と称するものとする。たとえば、図1及び図2を参照すると、重心の位置が移動することで、垂線の足X(図1)から垂線の足Y(図2)に対応する位置に移動する。また、以下の説明において、後述の後脚12から前脚11に向かう方向を前方向とし、前脚11から後脚12に向かう方向を後方向とする。さらに、ある位置を通る左右方向の直線より前方向を前側とし、ある位置を通る左右方向の直線より後方向を後側とする。
本実施の形態1に係る炊飯器100には、炊飯器内の食品などの重量を検知する重量検知センサが設けられたセンサ組込み脚13(重量検知脚)が設けられており、炊飯器100内の食品の検知精度の向上と、載置される炊飯器の安定性の向上とを両立をする改良がなされている。
【0013】
[炊飯器100の構成]
図1及び図2に示すように、炊飯器100は、本体1、開閉する蓋2、蓋2を本体1に開閉自在に取り付ける蓋開閉ヒンジ4、調理する食品(たとえば米や水)を入れる釜3、調理のための制御をする制御装置(図示省略)、及び本体1を支持する脚50を有している。
本体1は、炊飯器100の外郭の側面及び底面を構成しており、釜3などの備品を収容可能なものである。そして、本体1の底面には、炊飯器100を支持する脚50が設けられている。また、本体1の上部には、蓋開閉ヒンジ4を介して蓋2が開閉自在に設けられている。
なお、図1及び図2において、本体1の形状は、釜3を設置するための凹部51が形成された縦断面略長方形形状であるものを図示しているが、これに限定されるものではない。さらに、図1及び図2において、本体1の底面は、平面形状となっているものを図示しているが、これに限定されるものではない。本体1の底面は、たとえば曲面などが形成されていてもよいし、波状などでもよい。
【0014】
蓋2は、釜3を設置するための凹部51を開放又は閉塞するものである。なお、図1及び図2において、蓋2の形状は、縦断面略長方形形状であるものを図示しているが、これに限定されるものではない。蓋2は、蓋開閉ヒンジ4を介して、開閉自在に本体1の上部に設けられている。
釜3(備品)は、米や水などの食品を入れるための容器であり、本体1から着脱自在のものである。なお、図1及び図2において、釜3の形状は、略凹形状となっているが、これに限定されるものではなく、たとえば凹部51に対応する形状などとするとよい。
蓋開閉ヒンジ4は、蓋2を本体1に開閉自在に接続するものである。この蓋開閉ヒンジ4は、本体1の上面の端部に設けられている。なお、図1及び図2において、蓋開閉ヒンジ4は、本体1の上面の端部に設けられているものを図示しているが、これに限定されるものではない。
制御装置は、ユーザーが設定する情報(たとえば、炊飯、保温など)に基づいて、釜3に入れられた食品を調理するために、各種機器(たとえば、コイルなど)を制御するものである。また、調理中において制御装置は、センサ組込み脚13が検知する食品の重量の検出結果に基づいて各種機器を制御するようになっている。たとえば、炊飯器100が電磁誘導加熱用の加熱コイルを有してるタイプのものであれば、制御装置はこの加熱コイルに供給する電流を制御して食品を調理する。
【0015】
脚50は、本体1の底面に設けられた炊飯器100を支持する脚であり、それぞれの脚50が設置面との接触点を有している。脚50は、炊飯器100を支持する前脚11及び後脚12と、釜3に入れられた食品の重量などを検知する機能を有するセンサ組込み脚13を有している。
前脚11は、蓋開閉ヒンジ4から離れた側の下部に設けた脚である。具体的には、本実施の形態1に係る炊飯器100の前脚11は、転倒しないように、垂線の足X(第1の垂線の足X)より前側に配置されるものとする。
後脚12は、蓋開閉ヒンジ4に近い側の下部に設けた脚である。具体的には、本実施の形態1に係る炊飯器100の後脚12は、転倒しないように、垂線の足Y(第2の垂線の足Y)より外側であって蓋開閉ヒンジ4の垂線の足Bよりも後側(外縁部)に配置されるものとする。
なお、図1及び図2では、脚50に前脚11及び後脚12が設けられた例を図示したが、詳細な脚50の配置については後述の[脚50の配置について]で詳しく記載するものとする。
【0016】
センサ組込み脚13は、炊飯器100を支持するとともに、釜3に入れられた食品や後述の水タンク5内の水の重量を検知する脚である。センサ組込み脚13が重量を検知する機構は、センサ組込み脚13にたとえば圧電素子で構成した重量検知センサを設けた構成などとするとよい。
なお、製造誤差や本体1の下部部品の歪みなどがあると、前脚11、後脚12あるいは他の底面部分が設置面に当たり、センサ組込み脚13が設置面に対して浮いてしまう場合がある。これにより、センサ組込み脚13の重量検知精度が低下してしまう場合ある。そこで、センサ組込み脚13は、前脚11、後脚12あるいは他の底面部分の下端よりも、下方に突出して設けられているのが好ましい。
【0017】
[脚50の配置について]
図3は、本発明の実施の形態1に係る炊飯器100の脚50の配置の一例について説明する図である。この図3では、垂線の足X及び垂線の足Yに対する、センサ組込み脚13及びセンサ組込み脚13以外の脚50の配置の一例について説明する。なお、図3では、センサ組込み脚13を含めた全脚数に対して、センサ組込み脚13の数を1〜3つまで変化させたときの脚50の配置例を示している。また、図3に図示される二重丸は、センサ組込み脚13でない脚50に対応し、黒丸がセンサ組込み脚13に対応する。
【0018】
本実施の形態1に係る炊飯器100の脚50の全脚数は3以上であり、その脚50のうちの少なくとも1つがセンサ組込み脚13である。そして、以下に説明する条件1、2を満たすように脚50が配置されている。なお、図3(a)〜図3(l)は、条件1、2を満たす脚50の配置の一例を具体的に示したものである。
(条件1)脚50のうち垂線の足Xに近い方から順に3番目までの脚50の少なくとも1つを、センサ組込み脚13とする。
(条件2)脚50のうち垂線の足Yに近い方から順に3番目までの脚50を結んで形成される三角形が、垂線の足Yを囲むように、3つの脚50を配置する。つまり、これらの3つの脚50の内側に垂線の足Yがくるように、3つの脚50を配置するということである。
(条件3)センサ組込み脚13を、垂線の足Xと垂線の足Yとを結ぶ線分上以外に設ける。
【0019】
[炊飯器100の有する効果]
(条件1)より、蓋2が閉じている状態において、脚50のうち垂線の足Xに近い方から順に3番目までの脚50が、センサ組込み脚13となる。つまり、蓋2が閉じている状態において、これに加重が加わる3つの脚の少なくとも1つがセンサ組込み脚13となるので、高精度に釜3内の食品の重量を検知することができる。
【0020】
また、(条件2)より、蓋2が開いており、釜3などの備品が取り外された状態において、脚50のうち垂線の足Yに近い方から順に3番目までの脚50を結んで形成される三角形が、垂線の足Yを囲むように、3つの脚50が配置される。つまり、蓋2を開くとともに、釜3などの備品が取り外された状態における垂線の足Yが、この三角形に囲まれるので、炊飯器100の安定性を向上させることができる。なお、図2において、蓋2を開くとともに、釜3などの備品をはずした状態を図示したのは、蓋2を閉じた状態における垂線の足Xからの移動量を最大とし、一番不安定になる状態でも、安定性を確保させるためである。
【0021】
また、(条件3)より、センサ組込み脚13が、垂線の足Xと垂線の足Yとを結ぶ線分上以外にあるため、蓋2の開閉の過渡期に、センサ組込み脚13に全荷重が加わった不安定状態(図4中央)に陥ることがなく、センサ組込み脚13を中心に回転して突然向きが変わってしまうことを回避することができる。
【0022】
このように、本実施の形態1に係る炊飯器100は、上記(条件1)及び(条件2)を満たすように脚50が配置されているので、蓋2を閉じた状態における炊飯器100内の食品の検知精度の向上と、蓋2を開いて釜3などの備品をはずした状態における炊飯器100の安定性の向上とを、両立することができる。
【0023】
ここで、図4は、本発明の実施の形態1に係る炊飯器100の蓋2を閉じた状態と開いた状態とにおける重心位置の移動について説明する図である。本実施の形態1に係る炊飯器100は、(条件1)及び(条件2)を満たすように脚50が配置されているので、蓋2が閉じた状態においても、開いた状態においても脚50によって炊飯器100が支持される。これにより、蓋2の開閉時に重心が移動する過渡状態の際に、たとえば図4の中央に図示されるような不安定な状態(不安定領域)のままとなってしまうことが抑制されるので、炊飯器100の安定性を向上させることができる。
【0024】
実施の形態2.
図5は、本発明の実施の形態2に係る炊飯器100Aのセンサ組込み脚13Aの構成を説明する模式図である。なお、本実施の形態2では、実施の形態1と同一部分には同一符号とし、実施の形態1との相違点を中心に説明するものとする。
センサ組込み脚13Aは、図5に示すように、棒状部品60に2箇所の下方に突出した脚61を設けて構成してもよい。つまり、棒状部品60のたとえば中央部に重量検知センサを設けて、2つの脚61と重量検知センサとを棒状部品60を介して機械的に接続する構成としてもよい。これにより、1つの重量検知センサで、2つの脚61に加わる荷重が検知できる。なお、図5では、脚61の数が2つである場合を図示したが、これに限定されるものではない。
さらに、センサ組込み脚13Aは、図5に示すように、断面形状が略半楕円形状の棒状部品65などとしてもよい。この棒状部品65の接地面は、脚50と比較すると広くなっている。そして、重量検知センサは、棒状部品65のたとえば中央部に設けるとよい。
【0025】
実施の形態2に係る炊飯器100Aは、上記(条件1)及び(条件2)を満たすことに加えて、センサ組込み脚13Aを、棒状部品60の下方に突出した脚61を2つ以上設けて構成する。これにより、1つの重量検知センサで2つ以上の脚61を、重量検知のための脚として機能させることができる。
あるいは、実施の形態2に係る炊飯器100Aは、上記(条件1)及び(条件2)を満たすことに加えて、センサ組込み脚13Aを断面形状が略半楕円形状の棒状部品65などで構成する。これにより、1つの重量検知センサで重量を検知する脚を複数設置することに対応する機能を得ることができる。
つまり、実施の形態2に係る炊飯器100Aは、実施の形態1に係る炊飯器100の有する効果に加えて、重量検知センサの数を減らすことができる分、部品点数を少なくするとともに部品の容積を減らすことができるので、炊飯器100Aの大型化を抑制することができる。
【0026】
実施の形態3.
図6は、本発明の実施の形態3に係る炊飯器100Bのセンサ組込み脚13Bの位置について説明する模式図である。なお、図6では、前脚11Bが2つ設けられ、後脚としてのセンサ組込み脚13Bが2つ設けられた例を図示している。また、本実施の形態3では、実施の形態1、2と同一部分には同一符号とし、実施の形態1、2との相違点を中心に説明するものとする。
【0027】
図6に図示されるように、開いた状態の蓋2に勢いをつけて閉めると、蓋2の前側の速度が上がって本体1に接触する。あるいは、開いた上体の蓋2に勢いをつけて閉めなくても、ユーザーは、蓋2を完全に閉めるために蓋2の前側を押し込むことが想定される。これにより、蓋2の前側に対応する位置(蓋2の前側の下方)に配置された前脚11Bに、特に強い衝撃(過荷重)が伝達されることになる。仮に、この蓋2の前側に対応する位置にセンサ組込み脚13Bが配置されていた場合には、その衝撃によって、センサ組込み脚13Bの重量検知センサが壊れてしまったり、重量検知センサを固定する持具などを損傷してしまったりする可能性がある。
【0028】
そこで、本実施の形態3に係る炊飯器100Bは、上記(条件1)及び(条件2)を満たすことに加えて、センサ組込み脚13Bを、蓋開閉ヒンジ4に対応する位置(蓋開閉ヒンジ4の下方近傍)に配置する。これにより、蓋2を閉める際における、センサ組込み脚13Bに加わる衝撃を抑制することができる。
つまり、本実施の形態3に係る炊飯器100Bは、実施の形態1に係る炊飯器100の有する効果に加えて、センサ組込み脚13Bへの過荷重による重量検知センサの故障や、重量検知センサを固定する持具への損傷を抑制することができるので、安定して長寿命な炊飯器100Bを提供することができる。
なお、実施の形態3に係る炊飯器100Bの脚50Bの配置としては、図3における(a)(b)(h)(k)の配置が該当する。
【0029】
実施の形態4.
図7は、本発明の実施の形態4に係る炊飯器100Cのセンサ組込み脚13Cの位置について説明する模式図である。図7では、前脚11Cが2つ設けられ、後脚12Cが2つ設けられ、さらに、垂線の足Xよりも後側で垂線の足Yよりも前側にセンサ組込み脚13Cが2つ設けられた例を図示している。なお、図7に図示されるセンサ組込み脚13Cは、後脚12Cと垂線の足Xとの間のうち、垂線の足Xよりとなるように配置されている。本実施の形態4では、実施の形態1〜3と同一部分には同一符号とし、実施の形態1〜3との相違点を中心に説明するものとする。
【0030】
図7に図示されるように、蓋2を開ける作用により蓋開閉ヒンジ4及び本体1を介して、衝撃が蓋開閉ヒンジ4の下方に伝達される可能性がある。これにより、蓋開閉ヒンジ4に対応する位置(蓋開閉ヒンジ4の下方)に配置された後脚12Cに、特に強い衝撃が伝達されることになる。仮に、この蓋開閉ヒンジ4に対応する位置にセンサ組込み脚13Cが配置されていた場合には、その衝撃によって、センサ組込み脚13Cの重量検知センサが壊れてしまったり、重量検知センサを固定する持具などを損傷してしまったりする可能性がある。
また、実施の形態3にて説明したように、蓋2を閉める作用により、蓋2の前側に対応する位置(蓋2の前側の下方)に配置された脚50Cほど、強い衝撃が伝達される。
【0031】
そこで、本実施の形態4に係る炊飯器100Cは、上記(条件1)及び(条件2)に加えて、センサ組込み脚13Cを、後脚12Cと垂線の足Xとの間のうち、垂線の足Xよりとなるように配置する。つまり、センサ組込み脚13Cを、蓋開閉ヒンジ4に対応する位置、及び蓋2の前側に対応する位置から離れた位置に、センサ組込み脚13Cを配置するということである。これにより、蓋2を閉める際及び蓋2を開ける際の双方において、センサ組込み脚13Cに加わる衝撃を抑制することができる。
つまり、本実施の形態4に係る炊飯器100Cは、実施の形態1に係る炊飯器100の有する効果に加えて、センサ組込み脚13Cへの過荷重による重量検知センサの故障や、重量検知センサを固定する持具への損傷を抑制することができるので、安定して長寿命な炊飯器100Cを提供することができる。
なお、実施の形態4に係る炊飯器100Cの脚50Cの配置としては、図3における(k)の配置が該当する。
【0032】
ここで、たとえば蓋2を閉める際の衝撃を特に抑制したい場合には、実施の形態3に係る炊飯器100Bの脚50Bの配置を採用し、蓋2を閉める際と開ける際の両方の衝撃を抑制したい場合には、本実施の形態3に係る炊飯器100Cの脚50Cの配置を採用するなどすればよい。
【0033】
さらに、図7では、前脚11Cが2つ設けられ、後脚12Cが2つ設けられ、さらに、垂線の足Xよりも後側で垂線の足Yよりも前側にセンサ組込み脚13Cが2つ設けられた例を図示しているがこの配置は、以下のように一般化することができる。
すなわち、脚50Cは少なくとも4本以上から構成され、少なくとも1つの脚50Cが垂線の足Xより前側に配置され、少なくとも1つの脚50Cが垂線の足Yより後側に配置され、さらに、垂線の足Xの後側から垂線の足Yの前側の間にセンサ組込み脚13Cが少なくとも1つ配置されるということである。
【0034】
これにより、蓋2の閉じた状態であって釜3を本体1に取り付けた状態と、蓋2を開いた状態であって釜3を本体1から取り外した状態とでは、設置面に接触する脚50Cが少なくとも1つ異なることになる。なお、先述の炊飯器100の構成で示したように、センサ組込み脚13Cは、どの脚50Cよりも下方に突出しているものとする。
つまり、図7に図示されるように、蓋2の閉じた状態であって釜3を本体1に取り付けた状態ではX’に示す4つの脚50Cが炊飯器100Cを支持し、蓋2を開いた状態であって釜3を本体1から取り外した状態ではY’に示す4つの脚50Cが炊飯器100Cを支持するということである。
このように、重心の移動に応じて、炊飯器100Cを支持する脚50Cが異なるように脚50Cを配置することで、蓋2の閉じた状態であって釜3を本体1に取り付けた状態と、蓋2を開いた状態であって釜3を本体1から取り外した状態との双方で、炊飯器100Cの安定性を向上させることができる。
【0035】
実施の形態5.
図8は、本発明の実施の形態5に係る炊飯器100Dのセンサ組込み脚13Dの位置について説明する模式図である。なお、図8に図示される前脚11Dは脚50Dのうち一番前側にある脚であるものとする。また、本実施の形態5では、実施の形態1〜4と同一部分には同一符号とし、実施の形態1〜4との相違点を中心に説明するものとする。
【0036】
本実施の形態5に係る炊飯器100Dは、上記(条件1)及び(条件2)を満たすことに加えて、センサ組込み脚13Dを、前脚11Dから垂線の足Xまでの距離をaとし、後脚から垂線の足Xまでの距離をbとしたときに、距離a>距離bを満たすように配置する。これにより、備品を取り付けて蓋2を閉じた状態において、常に荷重の1/2以上がセンサ組込み脚13Dに加わることになる。これにより、本実施の形態5に係る炊飯器100Dは、実施の形態1の炊飯器100の有する効果に加えて、釜3に入れられた食品の重量の検知精度を向上させることができる。
【0037】
ここで、炊飯器100Dの設置面に反りや傾きなどにより、炊飯器100Dが4つ以上の脚50Dではなく、3つの脚50Dで支持される場合がある。しかし、このような場合でも、本実施の形態5に係る炊飯器100Dは、センサ組込み脚13Dが距離a>距離bを満たすように配置されるので、センサ組込み脚13Dのいずれかが設置面に対して浮き上がってしまうことが抑制される。つまり、測定精度が低減してしまうことを抑制することができる。
【0038】
実施の形態6.
図9は、本発明の実施の形態6に係る炊飯器100Eのセンサ組込み脚13Eの位置について説明する模式図である。なお、図9では、後脚をセンサ組込み脚13Eとした場合を例として図示している。また、本実施の形態6では、実施の形態1〜5と同一部分には同一符号とし、実施の形態1〜5との相違点を中心に説明するものとする。
本実施の形態6に係る炊飯器100Eは、炊飯時の蒸気を炊飯器外部に漏出させない機能を有する炊飯器である。この本実施の形態6に係る炊飯器100Eには、釜3と嵌合して釜3の上部の空間を略閉塞する内蓋(図示省略)と、加熱時に釜3と内蓋とで形成される空間53で発生する蒸気の通路となるカートリッジ6と、空間53で発生する蒸気がカートリッジ6を介して送り込まれる水タンク5(備品)とを有している。
なお、内蓋及び水タンク5は、本体1から着脱可能(着脱自在)な備品である。また、図9では、水タンク5が、釜3に対して前側に配置されたものを一例として図示している。
【0039】
図9(a)は、炊飯器100Eが炊飯前の状態を図示している。すなわち、備品を全て取り付け、水タンク5に所定の水量を入れ、釜3には所定の米と水7を入れた状態である(これを状態1と呼ぶ)。このときの重心は、垂線の足X1(第3の垂線の足)に対応している。
図9(b)は、炊飯器100Eが炊飯後の状態を図示している。すなわち、備品は全て取り付け、水タンク5には炊飯中に発生した蒸気が復水されて増加した分だけ増加した水が貯留され、釜3には炊飯されたご飯8がある状態である(これを状態2と呼ぶ)。このときの重心は、垂線の足X2(第4の垂線の足)に対応している。
ここで、前脚11Eから垂線の足X1までの距離をaとし、センサ組込み脚13Eから垂線の足X1までの距離をbとする。同様に、前脚11Eから垂線の足X2までの距離をaとし、センサ組込み脚13Eから垂線の足X2までの距離をbとする。
【0040】
本実施の形態6に係る炊飯器100Eは、上記(条件1)及び(条件2)を満たすことに加えて、状態1及び状態2において距離a>距離bを満たすように前脚11E及びセンサ組込み脚13Eが配置されている。これにより、炊飯前だけでなく炊飯後においても、精度よく重量を検知することができる。
つまり、本実施の形態6に係る炊飯器100Eは、実施の形態1に係る炊飯器100の有する効果に加えて、炊飯前だけでなく炊飯後においても、精度よく重量を検知することができるということである。
【0041】
ここで、さらに望ましくは、蓋2は閉じた状態であってご飯8が消費された状態においても、距離a>距離bを満たすように、前脚11E及びセンサ組込み脚13Eが配置されているとよい。なお、このときの重心は、垂線の足X3に対応している。また、前脚11Eから垂線の足X3までの距離をaとし、センサ組込み脚13Eから垂線の足X3までの距離をbとする。これにより、炊飯後の水タンク5に貯留された水が増加した状態においても、脚50Eが距離a>距離bを満たすように配置することになるので、ご飯が消費された重量を精度よく検知することができる。つまり、ご飯の残量を表示したり、保温温度を適正に制御したりすることができる。
【0042】
また、水タンク5には、ユーザーが、炊飯前に発生する蒸気を復水させるために水を入れる必要があるが、この際に目安となる水位表示(水量を示す印)を設けるとよい。これにより、ユーザーは、より正確に水タンク5に水を入れることができる。ここで、水タンク5に入れる水の水量は、水位表示に合わせた目分量であり、誤差が生じる可能性がある。
しかし、本実施の形態6に係る炊飯器100Eは、上記(条件1)及び(条件2)を満たすように脚50Eが配置されるので、このような水量の誤差が存在していても、この誤差が重量検知センサに与える影響を小さくすることができる。つまり、釜に投入した米と水の重量を精度よく検知することができる。
【0043】
実施の形態7.
図10は、本発明の実施の形態7に係る調理装置100Fのセンサ組込み脚13Fの位置について説明する模式図である。図11は、本発明の実施の形態7に係る調理装置100Fのセンサ組込み脚13Fの位置について説明する模式図である。なお、本実施の形態7では、実施の形態1〜6と同一部分には同一符号とし、実施の形態1〜6との相違点を中心に説明するものとする。
実施の形態1〜6に係る炊飯器100、100A〜100Eにおいては、蓋2が本体1の略上面全体(略天面全体)を覆うように設けられ、蓋開閉ヒンジ4が上面の端部に設けられたものを一例として説明したが、このような形態に限定されるものではない。
つまり、図10(a)及び図10(b)に示すように、蓋2Fが調理装置100Fの前面に設けられていても、また、図10(a)に図示するように蓋開閉ヒンジ4Fが下端に設けられていても、図10(b)に図示するように正面側から見て左端に設けられていてもよい。このように、蓋開閉ヒンジ4Fに対して手前側下開き(図10(a))や手前側横開き(図10(b))である調理装置100Fについても、実施の形態1〜6で述べた脚50、50A〜50Eの配置を適用可能である。
【0044】
また、図11に示すように、調理装置100Fには、蓋開閉ヒンジ4Fが設けられていない構成としてもよい。つまり、蓋2Fと本体1とが蓋開閉ヒンジ4Fを介して接続される構成ではなく、蓋2Fの下部に引き出し可能な引出しトレイ62が設けられた構成としても、実施の形態1〜6で述べた脚50、50A〜50Eの配置を適用可能である。
【0045】
また、実施の形態1〜6では、調理装置として炊飯器を例に挙げてきたが、食材重量に応じた調理制御を行う装置であって、装置操作時に重心位置が変化するような調理装置であればどのような機器においても応用が可能である。具体的には、たとえば電子レンジ、魚焼きグリル、IH調理器、及び冷凍冷蔵庫に組み込まれる略独立した引き出しやケースにおいて冷却制御をする装置などに用いることができる。また、本実施の形態7に係る調理装置100Fも、たとえば電子レンジ、魚焼きグリル、IH調理器、及び冷凍冷蔵庫に組み込まれる略独立した引き出しやケースにおいて冷却制御をする装置などに適用可能である。
【0046】
本実施の形態1〜6に係る炊飯器100、100A〜100E及び実施の形態7に係る調理装置100Fは、本体1内の食品の重量の検知をセンサ組込み脚13、13A〜13Fで実施するものである。つまり、本体1の内部に、重量の検知をする機構のうちの全てを収納するのではないので、その分大型化を抑制することができる。なお、実施の形態1〜7に記載の内容は、適宜組み合わせてよいことは言うまでもない。
【符号の説明】
【0047】
1 本体、2、2F 蓋、3 釜、4、4F 蓋開閉ヒンジ、5 水タンク、6 カートリッジ、7 米と水、8 ご飯、11、11B〜11E 前脚、12、12C 後脚、13、13A〜13F センサ組込み脚、50、50B〜50E 脚、51 凹部、53 空間、60 棒状部品、61 脚、62 引出しトレイ、65 棒状部品、100、100A〜100E 炊飯器、100F 調理装置。
【特許請求の範囲】
【請求項1】
着脱自在に備品が収容される本体と、
前記本体に開閉可能に設けられた蓋と、
前記本体の底面に設けられる3つ以上の脚とを有し、
前記脚のうち少なくとも1つが重量を検知するための重量検知脚である調理装置において、
前記重量検知脚は、
前記備品を前記本体に取り付けて前記蓋を閉じた状態における重心を通る垂直線である第1の垂線の足に対して、該第1の垂線の足に近い方から順に3番目までの少なくとも1つからなり、
前記本体の底面に設けられる前記脚は、
前記蓋を開いた状態であって前記備品を前記本体から取り外した状態における重心を通る垂直線である第2の垂線の足が、該第2の垂線の足に近い方から順に3番目までの前記脚を結んで形成される三角形の内側となるように配置された
ことを特徴とする調理装置。
【請求項2】
前記重量検知脚は、
前記第1の垂線の足と、前記第2の垂線の足とを通る直線以外の位置に設置される
ことを特徴とする請求項1に記載の調理装置。
【請求項3】
前記蓋は、前記本体に開閉自在に接続する蓋開閉ヒンジを介して前記本体の上部又は側面に設けられ、
前記重量検知脚が、
前記第1の垂線の足よりも、前記本体の底面の前記蓋開閉ヒンジの下方に対応する位置よりに配置された
ことを特徴とする請求項1又は2に記載の調理装置。
【請求項4】
前記蓋は、前記本体に開閉自在に接続する蓋開閉ヒンジを介して前記本体の上部又は側面に設けられ、
前記蓋開閉ヒンジの下方に対応する位置に前記重量検知脚でない前記脚が配置され、
前記重量検知脚が、
前記重量検知脚でない前記脚よりも、前記第1の垂線の足よりに配置された
ことを特徴とする請求項1又は2に記載の調理装置。
【請求項5】
前記蓋は、
前記本体の側面に、前後方向に引出し自在に設けられている
ことを特徴とする請求項1又は2のいずれか一項に記載の調理装置。
【請求項6】
前記脚は、少なくとも4つ以上から構成され、
前記重量検知脚は、前記重量検知脚でない前記脚より下方に突出し、
少なくとも1つの前記脚が、前記第1の垂線の足より前側に配置され、
少なくとも1つの前記脚が、前記第2の垂線の足より後側に配置され、
少なくとも1つの前記重量検知脚が、前記第1の垂線の足より後側であって前記第2の垂線の足より前側に配置される
ことを特徴とする請求項1〜5のいずれか一項に記載の調理装置。
【請求項7】
前記本体を縦断面視した際において、
前記重量検知脚は、
前記脚のうち一番前側に設置される脚と、前記第1の垂線の足との距離より、
前記重量検知脚から前記第1の垂線の足までの距離の方が小さくなるように配置された
ことを特徴とする請求項1〜6のいずれか一項に記載の調理装置。
【請求項8】
調理後に移動する前記容器に入れられた水分を貯留する水タンクと、
前記備品であって、前記容器を略密閉して内部空間を構成する中蓋とを有し、
加熱調理中において前記内部空間の蒸気が前記水タンクに送り込まれ、前記本体及び前記蓋より外部に前記蒸気が漏出することを防ぐ機能を有するものであって、
前記本体を縦断面視した際において、
前記重量検知脚は、
一番前側に設置される前記脚よりも、前記備品を前記本体に取り付けて前記蓋を閉じた状態であって加熱調理前における第3の垂線の足よりに配置され、
且つ、
一番前側に設置される前記脚よりも、前記備品を前記本体に取り付けて前記蓋を閉じた状態であって加熱調理後における第4の垂線の足よりに配置された
ことを特徴とする請求項1〜7のいずれか一項に記載の調理装置。
【請求項9】
前記水タンクは、
該水タンク内の水量を示す印が設けられた
ことを特徴とする請求項8に記載の調理装置。
【請求項10】
前記重量検知脚は、
本体下面に設置される棒状部品と、
前記棒状部品に設けられ、その下面が接地面と接触する2つ以上の脚と、より構成された
ことを特徴とする請求項1〜9のいずれか一項に記載の調理装置。
【請求項11】
前記重量検知脚の検出結果に基づいて調理のための制御をする制御装置を備えた
ことを特徴とする請求項1〜10に記載の調理装置。
【請求項1】
着脱自在に備品が収容される本体と、
前記本体に開閉可能に設けられた蓋と、
前記本体の底面に設けられる3つ以上の脚とを有し、
前記脚のうち少なくとも1つが重量を検知するための重量検知脚である調理装置において、
前記重量検知脚は、
前記備品を前記本体に取り付けて前記蓋を閉じた状態における重心を通る垂直線である第1の垂線の足に対して、該第1の垂線の足に近い方から順に3番目までの少なくとも1つからなり、
前記本体の底面に設けられる前記脚は、
前記蓋を開いた状態であって前記備品を前記本体から取り外した状態における重心を通る垂直線である第2の垂線の足が、該第2の垂線の足に近い方から順に3番目までの前記脚を結んで形成される三角形の内側となるように配置された
ことを特徴とする調理装置。
【請求項2】
前記重量検知脚は、
前記第1の垂線の足と、前記第2の垂線の足とを通る直線以外の位置に設置される
ことを特徴とする請求項1に記載の調理装置。
【請求項3】
前記蓋は、前記本体に開閉自在に接続する蓋開閉ヒンジを介して前記本体の上部又は側面に設けられ、
前記重量検知脚が、
前記第1の垂線の足よりも、前記本体の底面の前記蓋開閉ヒンジの下方に対応する位置よりに配置された
ことを特徴とする請求項1又は2に記載の調理装置。
【請求項4】
前記蓋は、前記本体に開閉自在に接続する蓋開閉ヒンジを介して前記本体の上部又は側面に設けられ、
前記蓋開閉ヒンジの下方に対応する位置に前記重量検知脚でない前記脚が配置され、
前記重量検知脚が、
前記重量検知脚でない前記脚よりも、前記第1の垂線の足よりに配置された
ことを特徴とする請求項1又は2に記載の調理装置。
【請求項5】
前記蓋は、
前記本体の側面に、前後方向に引出し自在に設けられている
ことを特徴とする請求項1又は2のいずれか一項に記載の調理装置。
【請求項6】
前記脚は、少なくとも4つ以上から構成され、
前記重量検知脚は、前記重量検知脚でない前記脚より下方に突出し、
少なくとも1つの前記脚が、前記第1の垂線の足より前側に配置され、
少なくとも1つの前記脚が、前記第2の垂線の足より後側に配置され、
少なくとも1つの前記重量検知脚が、前記第1の垂線の足より後側であって前記第2の垂線の足より前側に配置される
ことを特徴とする請求項1〜5のいずれか一項に記載の調理装置。
【請求項7】
前記本体を縦断面視した際において、
前記重量検知脚は、
前記脚のうち一番前側に設置される脚と、前記第1の垂線の足との距離より、
前記重量検知脚から前記第1の垂線の足までの距離の方が小さくなるように配置された
ことを特徴とする請求項1〜6のいずれか一項に記載の調理装置。
【請求項8】
調理後に移動する前記容器に入れられた水分を貯留する水タンクと、
前記備品であって、前記容器を略密閉して内部空間を構成する中蓋とを有し、
加熱調理中において前記内部空間の蒸気が前記水タンクに送り込まれ、前記本体及び前記蓋より外部に前記蒸気が漏出することを防ぐ機能を有するものであって、
前記本体を縦断面視した際において、
前記重量検知脚は、
一番前側に設置される前記脚よりも、前記備品を前記本体に取り付けて前記蓋を閉じた状態であって加熱調理前における第3の垂線の足よりに配置され、
且つ、
一番前側に設置される前記脚よりも、前記備品を前記本体に取り付けて前記蓋を閉じた状態であって加熱調理後における第4の垂線の足よりに配置された
ことを特徴とする請求項1〜7のいずれか一項に記載の調理装置。
【請求項9】
前記水タンクは、
該水タンク内の水量を示す印が設けられた
ことを特徴とする請求項8に記載の調理装置。
【請求項10】
前記重量検知脚は、
本体下面に設置される棒状部品と、
前記棒状部品に設けられ、その下面が接地面と接触する2つ以上の脚と、より構成された
ことを特徴とする請求項1〜9のいずれか一項に記載の調理装置。
【請求項11】
前記重量検知脚の検出結果に基づいて調理のための制御をする制御装置を備えた
ことを特徴とする請求項1〜10に記載の調理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−200541(P2012−200541A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−70478(P2011−70478)
【出願日】平成23年3月28日(2011.3.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000176866)三菱電機ホーム機器株式会社 (1,201)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月28日(2011.3.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000176866)三菱電機ホーム機器株式会社 (1,201)
【Fターム(参考)】
[ Back to top ]