
識別装置
【課題】目標の識別精度を高くする。
【解決手段】実施形態の識別装置は、選択部、学習部、入力受付部、特徴抽出部、特徴量計算部、類似度計算部、識別部、及び出力制御部、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、画像から目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、評価基準を用いて特徴ベクトルの特徴量を計算する。類似度計算部は、特徴量と識別特徴量の類似度を計算する。識別部は、類似度を用いて目標を識別する。出力制御部は、識別結果を出力部に出力させる。
【解決手段】実施形態の識別装置は、選択部、学習部、入力受付部、特徴抽出部、特徴量計算部、類似度計算部、識別部、及び出力制御部、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、画像から目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、評価基準を用いて特徴ベクトルの特徴量を計算する。類似度計算部は、特徴量と識別特徴量の類似度を計算する。識別部は、類似度を用いて目標を識別する。出力制御部は、識別結果を出力部に出力させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、識別装置に関する。
【背景技術】
【0002】
従来から、未知の目標を識別する手法として、当該目標からのレーダエコーを処理して作成されるISAR(Inverse Synthetic Aperture Radar:逆合成開口レーダ)画像を用いた識別手法が知られている。
【0003】
例えば、未知の船舶の種類を識別する場合、ISAR画像上の未知の船舶の船首と船尾を結ぶ主軸の上側に位置する艦橋や砲台などの高さを使用して当該未知の船舶の輪郭形状をベクトルで表現し、このベクトルに基づいて未知の船舶の種類を識別する手法がある。
【0004】
しかしながら、この手法では、未知の船舶の輪郭形状を主軸からの高さを用いたベクトルで表現しているため、輪郭の凹みを表現できない場合があり、誤類別のおそれがある。例えば、艦橋から横に砲身が突き出ている場合、船舶の輪郭形状は主軸からの砲身の高さを用いたベクトルで表現されるため、砲身の下の空間が表現されず、砲身と同じ高さの構造物を載せた別の船舶と誤類別されるおそれがある。
【0005】
ところで、例えば、輝度勾配の共起関係の組み合わせのヒストグラムなどを使用することで、凹みを始めとする複雑な輪郭形状をベクトルで表現する技術が提案されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−6034号公報
【特許文献2】特開2010−44439号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述したような表現能力の高いベクトルは次元が高くなる傾向にある。このため、目標からのレーダエコーに基づく画像を用いた識別手法に適用した場合、ベクトルを目標識別に用いる特徴量に変換するために使用する評価基準の学習時に過学習が起き易くなってしまう。評価基準の学習時に過学習が起きてしまうと、評価基準の精度が悪化してしまうため、目標識別の精度も悪化してしまう。
【課題を解決するための手段】
【0008】
実施形態の識別装置は、選択部と、学習部と、入力受付部と、特徴抽出部と、特徴量計算部と、類似度計算部と、識別部と、出力制御部と、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルを記憶する学習サンプル記憶部から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、学習した複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、前記画像から前記目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、前記評価基準を用いて、前記特徴ベクトルの特徴量を計算する。類似度計算部は、前記特徴量と識別基準となる識別特徴量との類似度を計算する。識別部は、前記類似度を用いて、前記目標を識別する。出力制御部は、識別結果を出力部に出力させる。
【図面の簡単な説明】
【0009】
【図1】本実施形態の識別装置の構成例を示すブロック図。
【図2】本実施形態のISAR画像から生成した2値化画像例を示す図。
【図3】本実施形態の輝度勾配方向の共起関係を用いたベクトルの抽出手法例の説明図。
【図4】本実施形態の画像の輝度勾配方向の一部を表示した例を示す図。
【図5】本実施形態の特徴ベクトルの特徴量の計算手法例の説明図。
【図6】本実施形態の識別テーブルの例を示す図。
【図7】本実施形態の評価基準の生成手法例を示す説明図。
【図8】本実施形態の識別処理例を示すフローチャート図。
【図9】本実施形態の学習処理例を示すフローチャート図。
【図10】本実施形態の学習サンプル格納処理例を示すフローチャート図。
【図11】本実施形態の識別特徴量登録処理例を示すフローチャート図。
【図12】本実施形態の識別装置のハードウェア構成例を示すブロック図。
【発明を実施するための形態】
【0010】
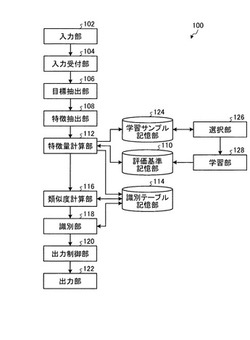
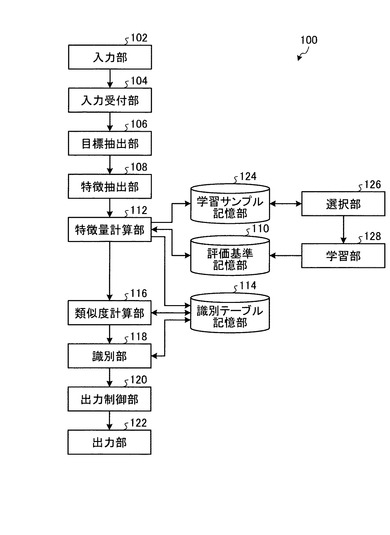
図1は、本実施形態の識別装置100の構成の一例を示すブロック図である。図1に示すように、識別装置100は、入力部102と、入力受付部104と、目標抽出部106と、特徴抽出部108と、評価基準記憶部110と、特徴量計算部112と、識別テーブル記憶部114と、類似度計算部116と、識別部118と、出力制御部120と、出力部122と、学習サンプル記憶部124と、選択部126と、学習部128とを、備える。
【0011】
なお入力部102は、例えば、画像入力用のインタフェースなどにより実現できる。また、入力受付部104、目標抽出部106、特徴抽出部108、特徴量計算部112、類似度計算部116、識別部118、出力制御部120、選択部126、及び学習部128は、例えば、CPU(Central Processing Unit)などの既存の制御装置により実現できる。また、評価基準記憶部110、識別テーブル記憶部114、及び学習サンプル記憶部124は、例えば、HDD(Hard Disk Drive)、SSD(Solid State Drive)、ROM(Read Only Memory)、メモリカードなどの磁気的、光学的、又は電気的に記憶可能な既存の記憶装置の少なくともいずれかにより実現できる。また、出力部122は、例えば、液晶ディスプレイ等の既存の表示装置により実現できる。
【0012】
入力部102は、目標からのレーダエコーに基づく画像を入力する。本実施形態では、入力部102は、識別対象の未知の船舶からのレーダエコーを処理することによりフレーム単位で生成される時系列のISAR(Inverse Synthetic Aperture Radar:逆合成開口レーダ)画像を順次入力する。このISAR画像には、識別対象の未知の船舶が含まれている。なお入力部102は、船舶(広義には、目標)と関係のない背景などを予め取り除いたISAR画像を入力するようにしてもよい。この場合、後述の目標抽出部106による処理が不要となる。
【0013】
本実施形態では、入力部102により入力されるISAR画像が、Ds(Ds≧1)次元のベクトルで表されるデータであり、ベクトルの各要素が輝度値である場合を例に取り説明する。例えば、入力部102により入力されるISAR画像Xは、(X1,X2,…,XDs)で表されるものとする。但し、入力部102により入力される画像は、これに限定されるものではない。
【0014】
入力受付部104は、入力部102から入力された画像の入力を受け付ける。本実施形態では、入力受付部104は、入力部102から、識別対象の未知の船舶が含まれる時系列のISAR画像の入力を順次受け付ける。
【0015】
目標抽出部106は、入力受付部104により受け付けられた画像から目標を抽出する。本実施形態では、目標抽出部106は、入力受付部104により受け付けられたISAR画像内に含まれる未知の船舶の領域を抽出する。
【0016】
目標抽出部106は、例えば、ISAR画像を輝度の高い領域と低い領域とに分け、輝度の高い領域を船舶の領域(広義には、目標領域)として抽出する。但し、目標の抽出手法はこれに限定されるものではない。例えば、目標抽出部106は、各ISAR画像から船舶領域の船舶の軸を検出し、検出した船舶の軸に基づいて各ISAR画像を正規化し、正規化した各ISAR画像を重畳することにより、船舶の領域を抽出するようにしてもよい。
【0017】
特徴抽出部108は、入力受付部104により受け付けられた画像から、目標抽出部106により抽出された目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。具体的には、特徴抽出部108は、特徴ベクトルとして、輝度勾配方向の共起関係を用いたベクトルを抽出する。本実施形態では、特徴抽出部108は、入力受付部104により受け付けられたISAR画像から、目標抽出部106により抽出された未知の船舶の領域の輪郭形状の特徴を表現する特徴ベクトルとして、輝度勾配方向の共起関係を用いたベクトルを抽出する。
【0018】
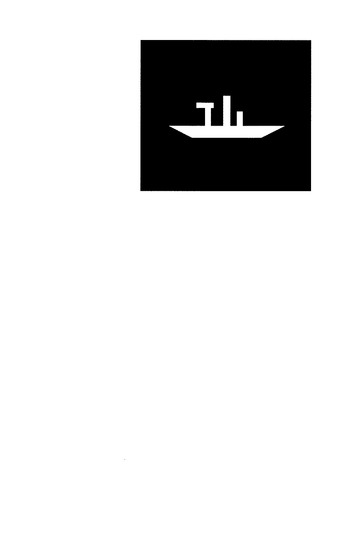
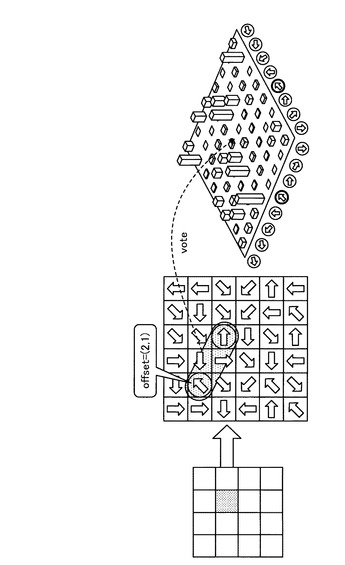
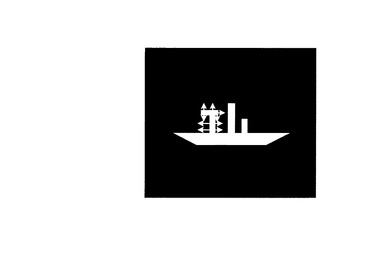
図2は、ISAR画像から生成した2値化画像の一例を示す図である。図3は、輝度勾配方向の共起関係を用いたベクトルの抽出手法の一例の説明図である。図4は、船舶の輝度勾配方向の一部を表示した例を示す図である。
【0019】
特徴抽出部108は、例えば、ISAR画像から、船舶の領域の画素を1、船舶の領域以外の画素を0とした2値化画像を生成し(図2参照)、生成した2値化画像を小領域に分割し(図3左図参照)、分割した小領域毎に次の処理を行う。具体的には、特徴抽出部108は、小領域中の各ピクセルの輝度勾配を計算し、計算した輝度勾配の中から予め定めたオフセット毎に当該オフセットを持つ2つの輝度勾配のペアの出現頻度を計算する(図3中央図参照)。そして特徴抽出部108は、オフセット及び輝度勾配のペア毎の出現頻度を並べることにより(図3右図参照)、輝度勾配方向の共起関係を用いたベクトル、即ち、特徴ベクトルを抽出する(図4参照)。図4に示す例では、艦橋から横に砲身が突き出ているが、砲身の下の空間も表現できている。なお、特徴抽出部108は、2値化画像の代わりに、ISAR画像から、船舶の領域の画素の輝度をそのままとし、船舶の領域以外の画素の輝度を0とした画像を生成してもよい。この画像からでも上記と同様の手法で輝度勾配方向の共起関係を用いたベクトルを抽出できる。
【0020】
評価基準記憶部110は、後述の選択部126及び学習部128により生成される評価基準を記憶する。本実施形態では、評価基準記憶部110は、識別器Fi(x)(1≦i≦N(N≧2))を有する評価基準{F1(x),F2(x),…,FN(x)}を記憶する。
【0021】
特徴量計算部112は、評価基準記憶部110に記憶されている評価基準を用いて、特徴抽出部108により抽出された特徴ベクトルの特徴量を計算する。
【0022】
本実施形態では、評価基準記憶部110に記憶されている評価基準{F1(x),F2(x),…,FN(x)}に含まれるそれぞれの識別器Fi(x)が、特徴ベクトルに対し、数式(1)に示すように評価値siを返却するものとする。ここで、後述の学習部128により、いずれの学習手法を用いて識別器Fi(x)が学習された場合であっても、識別器Fi(x)の出力は、識別対象のグループに属する尤度などとして表されるため、数式(1)を満たす。
【0023】
Fi(X)=si …(1)
【0024】
なお本実施形態では、評価値siがスカラー量である場合を例に取り説明するが、これに限定されるものではなく、例えば、複数の要素を持つベクトルであってもよい。また、後述する内容は、評価値siがベクトルであっても同様に適用できる。例えば、後述の学習部128により、3個以上のグループを識別する学習手法を用いて識別器Fi(x)が学習された場合、識別器Fi(x)の出力は、識別対象のグループに含まれる各カテゴリに帰属する尤度を要素に持つようなベクトルとなる。
【0025】
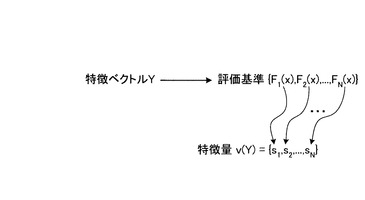
図5は、特徴ベクトルYの特徴量v(Y)の計算手法の一例の説明図である。特徴量計算部112は、図5に示すように、特徴抽出部108により抽出された特徴ベクトルYを評価基準記憶部110に記憶されている評価基準{F1(x),F2(x),…,FN(x)}に適用して、評価値siを取得し、取得した評価値siから特徴ベクトルYの特徴量v(Y)を計算する。本実施形態では、特徴量計算部112は、図5及び数式(2)に示すように、全ての評価値siを1つに並べることで特徴ベクトルYの特徴量v(Y)を計算する。
【0026】
v(Y)=(s1,s2,…,sN) …(2)
【0027】
例えば、識別器Fi(x)が2つのクラスを判別し、評価値siとして0又は1を出力する関数であるとする。この場合、特徴量計算部112は、特徴抽出部108により抽出された特徴ベクトルYの特徴量を、例えば、v(Y)=(1,1,0,1,0,…,1)のように、0と1との組み合わせで表現されたベクトルとして計算する。また特徴量計算部112は、特徴抽出部108により抽出された特徴ベクトルY’(Y’≠Y)の特徴量を計算すると、例えば、v(Y’)=(0,1,1,1,0,…,0)のように、やはり0と1との組み合わせで表現されたベクトルとして計算するが、計算した特徴量は特徴ベクトルYの特徴量と異なるものになる。つまり、この例では、0と1との組み合わせで表現されたベクトルが、ISAR画像に含まれる船舶が有する固有の特徴量となり、船舶の識別に有効な特徴量となる。なお、識別器Fi(x)が2つ以上のクラスを判別し、評価値siとして0及び1以外の実数を出力する関数である場合であっても、上記と同様である。
【0028】
但し、特徴量の計算手法は上述の手法に限定されるものではなく、取得した評価値siをどのように用いて特徴量を計算しても構わない。
【0029】
なお、評価値siがベクトルの場合、特徴ベクトルYの特徴量v(Y)は、評価値siが持つ各要素を並べたものとなる。つまり、評価値siの次元数をdiとすると、特徴ベクトルYの特徴量v(Y)の次元数Dは、次元数diの総和となる(D=d1+…+dN)。なお、各評価値siの次元数diは、全て同じ値でもよいし、それぞれ異なっていてもよい。
【0030】
また、特徴量計算部112は、特徴量v(Y)を評価値siのヒストグラムとして計算するようにしてもよい。具体的には、特徴量計算部112は、評価値siを離散化(必要なら要素毎に)しておき、その値に該当するビンに対して投票することでヒストグラム特徴量v(Y)を計算することができる。
【0031】
なお、評価値siがベクトルの場合、特徴量計算部112は、次元数diのヒストグラムとすることでヒストグラム特徴量v(Y)を計算することができる。また、スカラー量とベクトルのように次元数の異なる評価値siが混在している場合、特徴量計算部112は、同種の評価値si毎にヒストグラム特徴量を計算しておき、計算したヒストグラム特徴量を1つのベクトルとして並べることでヒストグラム特徴量v(Y)を計算することができる。
【0032】
また、特徴量計算部112は、評価値siを1つに並べてベクトル化した特徴量と、評価値siをヒストグラム化したヒストグラム特徴量とを、更に1つのベクトルとして並べる(連結する)ことで特徴量v(Y)を計算するようにしてもよい。また、特徴量計算部112は、評価値siに非線形な変換を施して特徴量を計算するようにしてもよい。また、特徴量計算部112は、計算した特徴量に対して、平均を0にしたり、2乗平均を1にしたりするなどの正規化を行うようにしてもよい。
【0033】
識別テーブル記憶部114は、識別基準となる各識別特徴量にカテゴリを対応付けた識別テーブルを記憶する。ここで、カテゴリとは、目標を識別する際の種類を表し、目標が船舶の場合には、船舶の名称、種類、又は大きさなどが該当する。識別特徴量及びカテゴリの組は、予め識別テーブルに登録されていてもよい。また、特徴量計算部112が、既知の船舶が含まれるISAR画像から抽出された特徴ベクトルの特徴量を計算し、計算した特徴量を識別特徴量として、既知の船舶が属するカテゴリに対応付けて識別テーブルに登録するようにしてもよい。
【0034】
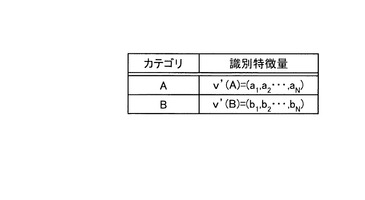
図6は、識別テーブルの一例を示す図である。図6に示す例では、カテゴリAとカテゴリAに属するか否かの識別基準となる識別特徴量v’(A)=(a1,a2,…,aN)が対応付けられており、カテゴリBとカテゴリBに属するか否かの識別基準となる識別特徴量v’(B)=(b1,b2,…,bN)が対応付けられている。
【0035】
類似度計算部116は、特徴量計算部112により計算された特徴量と識別テーブル記憶部114に記憶されている識別特徴量との類似度を計算する。本実施形態では、類似度計算部116は、数式(3)を用いて、特徴量計算部112により計算された特徴量v(Y)と識別テーブル記憶部114に記憶されている各識別特徴量(識別特徴量v’(A)及び識別特徴量v’(B)など)との類似度を計算する。
【0036】
L=(α,β)/||α||||β|| …(3)
【0037】
ここで、数式(3)は、ベクトルαとベクトルβとの単純類似度を計算する数式である。(α,β)は、ベクトルαとベクトルβとの内積を示し、||α||、||β||は、それぞれベクトルα、ベクトルβのノルムを示す。例えば、特徴量v(Y)と識別特徴量v’(A)との類似度Lは、数式(3)より、L=(v(Y),v’(A))/||v(Y)||||v’(A)||となる。
【0038】
なお、類似度計算部116は、ベクトル間の距離を計算する数式(4)又は数式(5)を用いて、特徴量計算部112により計算された特徴量v(Y)と識別テーブル記憶部114に記憶されている各識別特徴量(識別特徴量v’(A)及び識別特徴量v’(B)など)との類似度を計算するようにしてもよい。
【0039】
【数1】

【0040】
【数2】
【0041】
識別部118は、類似度計算部116により計算された類似度を用いて、目標を識別する。具体的には、識別部118は、類似度計算部116により計算された類似度を用いて、画像に含まれる未知の目標を同定するか、又は未知の目標が属する複数の候補を特定する。本実施形態では、識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度Lの値が大きい順、即ち、類似度の高い順に所定数の識別特徴量を選択する。そして識別部118は、選択した所定数の識別特徴量に対応するカテゴリの少なくともいずれかに、ISAR画像に含まれる船舶が属すると識別する。なお識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度Lが閾値を超えた識別特徴量のうち類似度の高い順に所定数の識別特徴量を選択するようにしてもよい。
【0042】
また、類似度計算部116が、ベクトル間の距離を計算する数式(4)又は数式(5)を用いて類似度Lを計算した場合、ベクトル間の距離が短いほど、即ち、類似度Lの値が小さいほど類似度が高くなる。この場合であれば、識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度Lの値が小さい順に所定数の識別特徴量を選択する。なお、識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度Lが閾値よりも小さい識別特徴量のうち類似度Lの値が小さい順に所定数の識別特徴量を選択するようにしてもよい。
【0043】
出力制御部120は、識別部118の識別結果を出力部122に出力させる。本実施形態では、出力制御部120は、識別部118によりISAR画像に含まれる船舶が少なくともいずれかに属すると識別されたカテゴリを出力部122に出力させる。
【0044】
出力部122は、出力制御部120により制御され、識別部118の識別結果を出力する。
【0045】
学習サンプル記憶部124は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルを記憶する。本実施形態では、学習サンプルが、船舶の領域の輪郭形状の特徴を表現する特徴ベクトルの特徴量である場合を例に取り説明するが、学習サンプルはこれに限定されるものではない。特徴量(広義には、学習サンプル)は、予め学習サンプル記憶部124に記憶されていてもよい。また、特徴量計算部112が、船舶が含まれるISAR画像から抽出された特徴ベクトルの特徴量を計算し、計算した特徴量を学習サンプル記憶部124に記憶するようにしてもよい。
【0046】
本実施形態では、学習サンプル記憶部124は、M(M≧2)個の特徴量を記憶している。なお、特徴量のカテゴリはC(C≧2)用意され、M個の特徴量はカテゴリ毎にMh(1≦h≦C)個の特徴量に分類されるものとする。つまり、M=M1+…+MCとなる。ここで、カテゴリは、前述したように、目標を識別する際の種類を表し、目標が船舶の場合には、船舶の名称、種類、又は大きさなどが該当する。つまり、M個の特徴量の中に種類αの船舶の特徴量と種類βの船舶の特徴量と種類γの船舶の特徴量との計3種類の船舶の特徴量が含まれていれば、C=3となる。
【0047】
選択部126は、学習サンプル記憶部124から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。特に選択部126は、選択する複数のグループのそれぞれに含まれる学習サンプルのカテゴリ数又はサンプル数が略同数となるように、当該複数のグループを選択する。具体的には、選択部126は、選択する複数のグループのそれぞれに含まれる学習サンプルのカテゴリ数又はサンプル数のグループ間の差が予め定められた範囲内に収まるように、当該複数のグループを選択する。なお本実施形態では、選択部126が、学習サンプル記憶部124から学習サンプルを無作為に選択(ランダムサンプリング)するものとする。これにより、選択部126により選択される複数のグループに含まれる学習サンプルのカテゴリは、選択部126の選択処理毎に異なることが期待できる。但し、学習サンプルの選択手法はこれに限定されるものではなく、選択する複数のグループに含まれる学習サンプルのカテゴリが選択処理毎に異なることが期待できれば、どのような選択基準で選択してもよい。
【0048】
本実施形態では、選択部126は、学習サンプル記憶部124から、各グループが特徴量を1個以上含むようにK(K=2)個のグループを無作為に選択する選択処理をN(N≧2)回行う。特に選択部126は、選択処理を行う際、K個のグループのそれぞれに含まれる特徴量のカテゴリ数が同数となるように、K個のグループを無作為に選択する。なお、Kの値は2以上であってもよい。
【0049】
このため選択部126は、学習サンプル記憶部124から特徴量を完全に無作為に選択するのではなく、カテゴリの特徴量の個数に応じて重み付けを行ってK個のグループ間の特徴量の個数の差を小さくするように調整したり、カテゴリの特徴量の個数に関わらずある一定の個数の特徴量を抽出するようにしたりしてもよい。なお、特徴量の個数を一定にする場合、選択部126は、さらに単純にカテゴリから特徴量を無作為に選択するようにしてもよいし、学習サンプルとしてまだ選択されていない未選択の特徴量をカテゴリから優先的に選択するようにしてもよい。
【0050】
学習部128は、選択部126により選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、学習した複数の識別基準を含む評価基準を生成する。本実施形態では、学習部128は、選択部126により選択されたK個のグループ毎に当該K個のグループを識別する識別器Fi(x)(1≦i≦N)を学習し、学習したN個の識別器を含む評価基準{F1(x),F2(x),…,FN(x)}を生成し、評価基準記憶部110に記憶する。
【0051】
学習部128により生成された評価基準{F1(x),F2(x),…,FN(x)}は、ISAR画像内に含まれる船舶の識別に用いられる。具体的には、評価基準{F1(x),F2(x),…,FN(x)}に含まれるN個の識別器Fi(x)のそれぞれが、識別対象のISAR画像(詳細には、ISAR画像内に含まれる船舶)に対する評価値を出力する。評価値は、例えば、識別器が予め学習したいずれのクラスに属するかを示す尤度やクラス番号などが該当する。そして、出力された複数の評価値がISAR画像内に含まれる船舶の特徴量として利用されることにより、船舶の識別に用いられる。
【0052】
本実施形態では、学習部128は、サポートベクターマシンにより、K個のグループを識別する識別器Fi(x)を学習する。サポートベクターマシンは、2クラスのパターン識別器を構成する手法である。サンプルから、各データとの距離が最大となる分離平面を求め、マージンを最大化するという基準で学習する。但し、識別器の学習手法はこれに限定されるものではなく、既存の学習手法を用いることができる。例えば、学習部128は、ブースティングなどの学習手法を用いることができる。また例えば、選択部126により選択された3個のグループを識別する識別器を学習する場合であれば、学習部128は、k近傍識別器、ベイズ分類、又はニューラルネットワークなどの学習手法を用いることができる。
【0053】
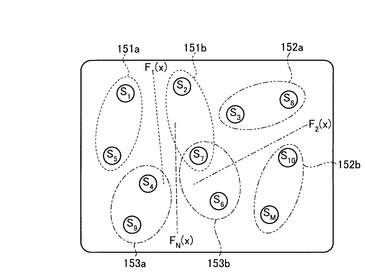
図7は、評価基準の生成手法の一例を示す説明図である。なお、図7に示す例では、S1〜SM(M≧11)が、学習サンプル(特徴量)を示し、C=Mであるものとする。つまり、図7に示す例では、全ての学習サンプルのカテゴリが異なるものとする。また、図7に示す例では、K=2であるものとする。つまり、図7に示す例では、選択部126は、各グループに含まれる学習サンプルのカテゴリ数が2となるように、即ち、C=Mであるため、各グループに含まれる学習サンプル数が2となるように、2個のグループを選択する。
【0054】
図7に示す例では、選択部126は、1回目の選択処理で、学習サンプルS1及びS5を含むグループ151aと、学習サンプルS2及びS7を含むグループ151bとを、選択している。また、選択部126は、2回目の選択処理で、学習サンプルS3及びS8を含むグループ152aと、学習サンプルS10及びSMを含むグループ152bとを、選択している。また、選択部126は、N回目の選択処理で、学習サンプルS4及びS9を含むグループ153aと、学習サンプルS6及びS7を含むグループ153bとを、選択している。
【0055】
また、学習部128は、選択部126により1回目の選択処理で選択されたグループ151aとグループ151bとを識別する識別器F1(x)を学習している。また、学習部128は、選択部126により2回目の選択処理で選択されたグループ152aとグループ152bとを識別する識別器F2(x)を学習している。また、学習部128は、選択部126によりN回目の選択処理で選択されたグループ153aとグループ153bとを識別する識別器FN(x)を学習している。これにより、学習部128は、学習したN個の識別器を含む評価基準{F1(x),F2(x),…,FN(x)}を生成する。
【0056】
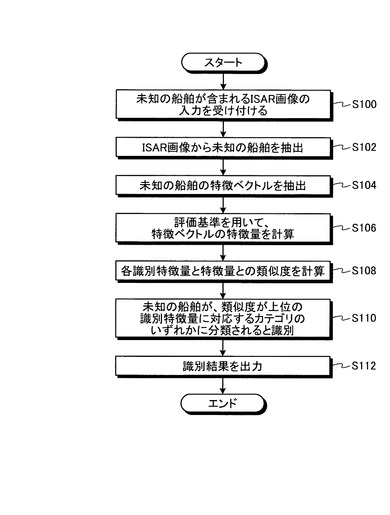
図8は、本実施形態の識別装置100で行われる識別処理の手順の流れの一例を示すフローチャート図である。
【0057】
まず、入力受付部104は、入力部102から、識別対象の未知の船舶が含まれるISAR画像の入力を受け付ける(ステップS100)。
【0058】
続いて、目標抽出部106は、入力受付部104により受け付けられたISAR画像から未知の船舶を抽出する(ステップS102)。
【0059】
続いて、特徴抽出部108は、入力受付部104により受け付けられたISAR画像から、目標抽出部106により抽出された未知の船舶の輪郭形状の特徴を表現する特徴ベクトル(輝度勾配方向の共起関係を用いたベクトル)を抽出する(ステップS104)。
【0060】
続いて、特徴量計算部112は、評価基準記憶部110に記憶されている評価基準を用いて、特徴抽出部108により抽出された特徴ベクトルの特徴量を計算する(ステップS106)。
【0061】
続いて、類似度計算部116は、特徴量計算部112により計算された特徴量と識別テーブル記憶部114に記憶されている各識別特徴量との類似度を計算する(ステップS108)。
【0062】
続いて、識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度が上位の識別特徴量を選択し、選択した識別特徴量に対応するカテゴリの少なくともいずれかに、ISAR画像に含まれる船舶が分類されると識別する(ステップS110)。
【0063】
続いて、出力制御部120は、識別部118の識別結果、即ち、識別部118によりISAR画像に含まれる船舶が少なくともいずれかに分類されると識別されたカテゴリを出力部122に出力させる(ステップS112)。
【0064】
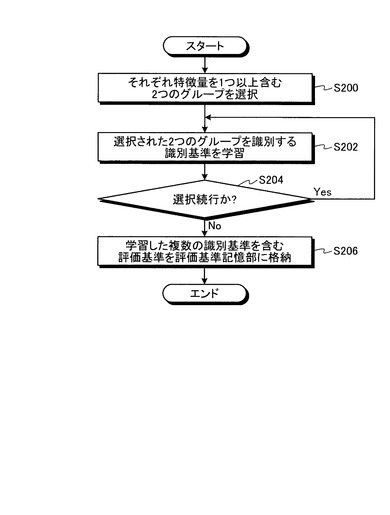
図9は、本実施形態の識別装置100で行われる学習処理の手順の流れの一例を示すフローチャート図である。
【0065】
まず、選択部126は、学習サンプル記憶部124から、それぞれ特徴量を1つ以上含む2つのグループを選択する(ステップS200)。この際、選択部126は、選択する2つのグループのそれぞれに含まれる特徴量のカテゴリ数のグループ間の差が予め定められた範囲内に収まるように、当該2つのグループを選択する。
【0066】
続いて、学習部128は、選択部126により選択された2つのグループを識別する識別基準を学習する(ステップS202)。
【0067】
続いて、選択部126は、例えば、選択がN回行われていない場合には、選択を続行すると判定し(ステップS204でYes)、ステップS200に戻り、選択がN回行われている場合には、選択を続行しないと判定し(ステップS204でNo)、ステップS206へ進む。
【0068】
続いて、学習部128は、ステップS202で学習した複数の識別基準を含む評価基準を生成し、評価基準記憶部110に格納する(ステップS206)。
【0069】
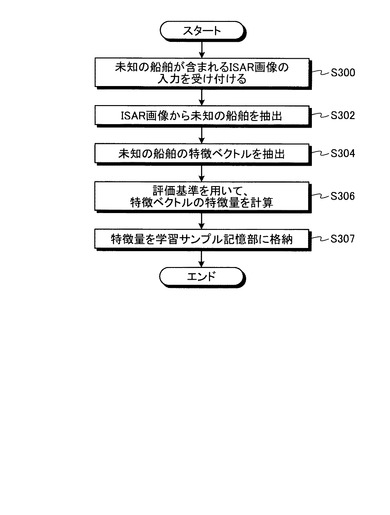
図10は、本実施形態の識別装置100で行われる学習サンプル格納処理の手順の流れの一例を示すフローチャート図である。なお、学習サンプル格納処理は、図8の識別処理中に行ってもよいし、図8の識別処理と別々に行ってもよい。
【0070】
まず、ステップS300〜S306までの処理は、図8のフローチャートのステップS100〜S106までの処理と同様である。
【0071】
ステップS307では、特徴量計算部112は、計算した特徴量を学習サンプルとして学習サンプル記憶部124に格納する。
【0072】
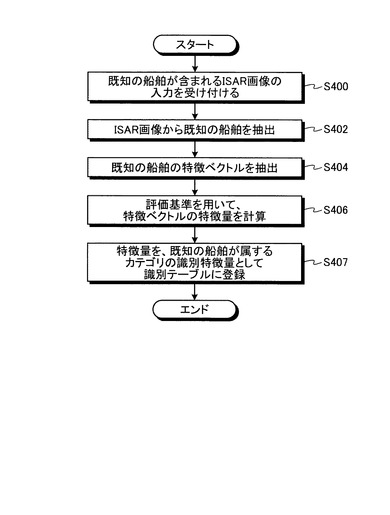
図11は、本実施形態の識別装置100で行われる識別特徴量登録処理の手順の流れの一例を示すフローチャート図である。
【0073】
まず、入力受付部104は、入力部102から、既知の船舶が含まれるISAR画像の入力を受け付ける(ステップS400)。
【0074】
続いて、目標抽出部106は、入力受付部104により受け付けられたISAR画像から既知の船舶を抽出する(ステップS402)。
【0075】
続いて、特徴抽出部108は、入力受付部104により受け付けられたISAR画像から、目標抽出部106により抽出された既知の船舶の輪郭形状の特徴を表現する特徴ベクトル(輝度勾配方向の共起関係を用いたベクトル)を抽出する(ステップS404)。
【0076】
続いて、特徴量計算部112は、評価基準記憶部110に記憶されている評価基準を用いて、特徴抽出部108により抽出された特徴ベクトルの特徴量を計算する(ステップS406)。
【0077】
続いて、特徴量計算部112は、計算した特徴量を、既知の船舶が属するカテゴリの識別特徴量として、当該カテゴリに対応付けて識別テーブルに登録する(ステップS407)。
【0078】
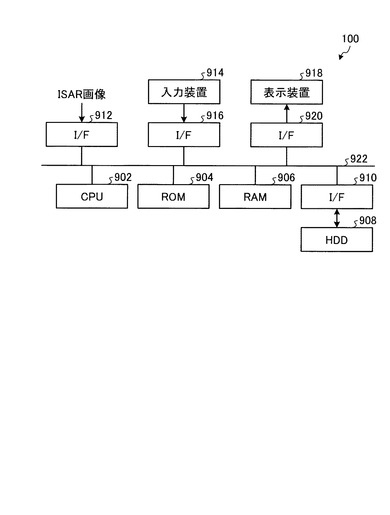
図12は、本実施形態の識別装置100のハードウェア構成の一例を示すブロック図である。図12に示すように、本実施形態の識別装置100は、CPU902と、ISAR画像に含まれる未知の船舶を識別するための識別プログラムなどを記憶するROM904と、RAM906と、評価基準や識別テーブルなどを記憶するHDD908と、HDD908とのインタフェースであるI/F910と、ISAR画像入力用のインタフェースであるI/F912と、マウスやキーボードなどの入力装置914と、入力装置914とのインタフェースであるI/F916と、ディスプレイなどの表示装置918と、表示装置918とのインタフェースであるI/F920と、バス922とを、備えており、通常のコンピュータを利用したハードウェア構成となっている。なおCPU902、ROM904、RAM906、I/F910、I/F912、I/F916、及びI/F920は、バス922を介して互いに接続されている。
【0079】
識別装置100では、CPU902が、ROM904から識別プログラムをRAM906上に読み出して実行することにより、上記各部(入力受付部、目標抽出部、特徴抽出部、特徴量計算部、類似度計算部、識別部、出力制御部など)がコンピュータ上で実現され、HDD908に記憶されている評価基準や識別テーブルなどを用いて、I/F912から入力されるISAR画像に含まれる未知の船舶を識別する。
【0080】
なお、識別プログラムはHDD908に記憶されていてもよい。また、識別プログラムは、インストール可能な形式又は実行可能な形式のファイルでCD−ROM、CD−R、メモリカード、DVD、フレキシブルディスク(FD)等のコンピュータで読み取り可能な記憶媒体に記憶されて提供されるようにしてもよい。また、識別プログラムを、インターネット等のネットワークに接続されたコンピュータ上に格納し、ネットワーク経由でダウンロードさせることにより提供するようにしてもよい。また、識別プログラムを、インターネット等のネットワーク経由で提供または配布するようにしてもよい。また、評価基準や識別テーブルは、ROM904に記憶されていてもよい。また、ISAR画像をHDD908に記憶しておき、I/F910からISAR画像を入力するようにしてもよい。
【0081】
以上のように、本実施形態の識別装置100では、複数のグループ毎に、当該複数のグループを識別する識別基準、即ち各グループに含まれる学習サンプルのカテゴリ又はカテゴリの組み合わせをグループ間で識別する識別基準を学習する。そして本実施形態の識別装置100では、複数のグループの選択、即ち、各グループに含まれる学習サンプルのカテゴリ又はカテゴリの組み合わせの選択は、選択部126により自動的に行われる。このため、本実施形態の識別装置100によれば、人間が識別基準を教示する必要がなく、識別基準の学習に伴うコストを削減することができる。
【0082】
また本実施形態の識別装置100では、グループの組み合わせ数、即ち、グループに含まれる学習サンプルのカテゴリ又はカテゴリの組み合わせのグループ間の組み合わせ数は、膨大な数になる傾向にある。このため、本実施形態の識別装置100によれば、上限にとらわれず、必要なだけ識別基準を学習して、評価基準を生成することができる。また、多くの識別基準を用いることで、過学習が原因で発生する誤認識を分散させ、その影響を抑えることができる。特に本実施形態の識別装置100では、過学習が生じにくいサポートベクターマシンを用いて識別基準を学習する場合を例示しており、この場合、過学習が生じる可能性をより低くすることができる。
【0083】
また本実施形態の識別装置100では、選択部126は、選択する複数のグループのそれぞれに含まれる学習サンプルのカテゴリ数又はサンプル数のグループ間の差が予め定められた範囲内に収まるように、当該複数のグループを無作為に選択する。つまり本実施形態の識別装置100では、識別対象の複数のグループのそれぞれを無作為かつ均等な分布を有するように選択する。このようにして選択された複数のグループを識別するように学習された識別基準は、識別対象の目標の特徴量に対する評価値、即ち、学習に用いた複数のグループのいずれに属すると判定されるかが完全にランダムとなる。
【0084】
従って、例えば、2つの目標それぞれの特徴量に同一の識別基準を用いると、2つの目標が同一である場合は、評価値の値が同一となること、即ち、両目標が識別対象の複数のグループのうちのいずれかのグループに類似することが期待できる。一方、2つの目標が異なる場合は、評価値の値がどのような値となるかは不定、即ち、無相関となる。ここで、互いに異なる2つの目標それぞれの特徴量に対する評価値が無相関であるということは、例えば、目標識別を行う際の類似度計算に正規化相関などを利用した場合、類似度がゼロになるということを示す。
【0085】
つまり、本実施形態の識別装置100では、選択する複数のグループのそれぞれに含まれる学習サンプルのカテゴリ数又はサンプル数のグループ間の差が予め定められた範囲内に収まるように、当該複数のグループを無作為に選択することにより、この複数のグループを識別する識別基準には、異なる目標の類似度を分離するような変換が、組み込まれているという特徴を持つ。
【0086】
従って、本実施形態の識別装置100によれば、画像に含まれる目標を識別するために有効、即ち、目標識別の識別精度において好適な識別基準を含む評価基準を学習サンプルから効率的かつ高速に学習することができる。
【0087】
そして本実施形態の識別装置100では、このような評価基準を用いて、ISAR画像に含まれる未知の船舶の輪郭形状の特徴を表現する特徴ベクトルを特徴量に変換するため、特徴ベクトルが輝度勾配方向の共起関係を用いたベクトルなど高次元のベクトルであったとしても、精度のよい特徴量に変換でき、目標の識別精度を高くすることができる。
【0088】
また本実施形態の識別装置100では、評価基準を効率的かつ高速に学習することができるため、評価基準を用いて計算した特徴量を更に学習サンプルとして用いて評価基準の学習を再帰的に行うことも容易に実現でき、評価基準の性能を更に高めることができる。
【0089】
特に本実施形態では、ベクトルの次元の大きさではなくサンプル数に応じて学習にかかる時間が決まるサポートベクターマシンを用いて識別基準を学習しているため、評価基準をより高速に学習することができる。
【0090】
以上のように本実施形態によれば、目標の識別精度を高くすることができる。
【0091】
なお、本発明は、上記実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化することができる。また、上記実施の形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素からいくつかの構成要素を削除してもよい。さらに、異なる実施の形態にわたる構成要素を適宜組み合わせても良い。
【0092】
例えば、上記実施形態のフローチャートにおける各ステップを、その性質に反しない限り、実行順序を変更し、複数同時に実施し、あるいは実施毎に異なった順序で実施してもよい。
【0093】
また例えば、上記実施形態では、識別装置が識別処理と学習処理の両処理を行う例について説明したが、識別処理、学習処理を、別々の装置で行うようにしてもよい。例えば、識別処理、学習処理を、それぞれ識別装置、学習装置が行うようにしてもよい。この場合、学習装置で生成した評価基準を識別装置に格納しておけばよい。
【0094】
また例えば、上記実施形態では、学習サンプルが、船舶の領域の輪郭形状の特徴を表現する特徴ベクトルの特徴量である場合を例に取り説明したが、学習サンプルは、船舶が含まれるISAR画像であってもよい。この場合、選択部が、選択したISAR画像を後に、選択したISAR画像に含まれる目標の特徴ベクトルを抽出し、抽出した特徴ベクトルを特徴量に変換し、学習部が、変換された特徴量を用いて学習すればよい。
【符号の説明】
【0095】
100 識別装置
102 入力部
104 入力受付部
106 目標抽出部
108 特徴抽出部
110 評価基準記憶部
112 特徴量計算部
114 識別テーブル記憶部
116 類似度計算部
118 識別部
120 出力制御部
122 出力部
124 学習サンプル記憶部
126 選択部
128 学習部
902 CPU
904 ROM
906 RAM
908 HDD
910 I/F
912 I/F
914 入力装置
916 I/F
918 表示装置
920 I/F
922 バス
【技術分野】
【0001】
本発明の実施形態は、識別装置に関する。
【背景技術】
【0002】
従来から、未知の目標を識別する手法として、当該目標からのレーダエコーを処理して作成されるISAR(Inverse Synthetic Aperture Radar:逆合成開口レーダ)画像を用いた識別手法が知られている。
【0003】
例えば、未知の船舶の種類を識別する場合、ISAR画像上の未知の船舶の船首と船尾を結ぶ主軸の上側に位置する艦橋や砲台などの高さを使用して当該未知の船舶の輪郭形状をベクトルで表現し、このベクトルに基づいて未知の船舶の種類を識別する手法がある。
【0004】
しかしながら、この手法では、未知の船舶の輪郭形状を主軸からの高さを用いたベクトルで表現しているため、輪郭の凹みを表現できない場合があり、誤類別のおそれがある。例えば、艦橋から横に砲身が突き出ている場合、船舶の輪郭形状は主軸からの砲身の高さを用いたベクトルで表現されるため、砲身の下の空間が表現されず、砲身と同じ高さの構造物を載せた別の船舶と誤類別されるおそれがある。
【0005】
ところで、例えば、輝度勾配の共起関係の組み合わせのヒストグラムなどを使用することで、凹みを始めとする複雑な輪郭形状をベクトルで表現する技術が提案されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−6034号公報
【特許文献2】特開2010−44439号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述したような表現能力の高いベクトルは次元が高くなる傾向にある。このため、目標からのレーダエコーに基づく画像を用いた識別手法に適用した場合、ベクトルを目標識別に用いる特徴量に変換するために使用する評価基準の学習時に過学習が起き易くなってしまう。評価基準の学習時に過学習が起きてしまうと、評価基準の精度が悪化してしまうため、目標識別の精度も悪化してしまう。
【課題を解決するための手段】
【0008】
実施形態の識別装置は、選択部と、学習部と、入力受付部と、特徴抽出部と、特徴量計算部と、類似度計算部と、識別部と、出力制御部と、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルを記憶する学習サンプル記憶部から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、学習した複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、前記画像から前記目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、前記評価基準を用いて、前記特徴ベクトルの特徴量を計算する。類似度計算部は、前記特徴量と識別基準となる識別特徴量との類似度を計算する。識別部は、前記類似度を用いて、前記目標を識別する。出力制御部は、識別結果を出力部に出力させる。
【図面の簡単な説明】
【0009】
【図1】本実施形態の識別装置の構成例を示すブロック図。
【図2】本実施形態のISAR画像から生成した2値化画像例を示す図。
【図3】本実施形態の輝度勾配方向の共起関係を用いたベクトルの抽出手法例の説明図。
【図4】本実施形態の画像の輝度勾配方向の一部を表示した例を示す図。
【図5】本実施形態の特徴ベクトルの特徴量の計算手法例の説明図。
【図6】本実施形態の識別テーブルの例を示す図。
【図7】本実施形態の評価基準の生成手法例を示す説明図。
【図8】本実施形態の識別処理例を示すフローチャート図。
【図9】本実施形態の学習処理例を示すフローチャート図。
【図10】本実施形態の学習サンプル格納処理例を示すフローチャート図。
【図11】本実施形態の識別特徴量登録処理例を示すフローチャート図。
【図12】本実施形態の識別装置のハードウェア構成例を示すブロック図。
【発明を実施するための形態】
【0010】
図1は、本実施形態の識別装置100の構成の一例を示すブロック図である。図1に示すように、識別装置100は、入力部102と、入力受付部104と、目標抽出部106と、特徴抽出部108と、評価基準記憶部110と、特徴量計算部112と、識別テーブル記憶部114と、類似度計算部116と、識別部118と、出力制御部120と、出力部122と、学習サンプル記憶部124と、選択部126と、学習部128とを、備える。
【0011】
なお入力部102は、例えば、画像入力用のインタフェースなどにより実現できる。また、入力受付部104、目標抽出部106、特徴抽出部108、特徴量計算部112、類似度計算部116、識別部118、出力制御部120、選択部126、及び学習部128は、例えば、CPU(Central Processing Unit)などの既存の制御装置により実現できる。また、評価基準記憶部110、識別テーブル記憶部114、及び学習サンプル記憶部124は、例えば、HDD(Hard Disk Drive)、SSD(Solid State Drive)、ROM(Read Only Memory)、メモリカードなどの磁気的、光学的、又は電気的に記憶可能な既存の記憶装置の少なくともいずれかにより実現できる。また、出力部122は、例えば、液晶ディスプレイ等の既存の表示装置により実現できる。
【0012】
入力部102は、目標からのレーダエコーに基づく画像を入力する。本実施形態では、入力部102は、識別対象の未知の船舶からのレーダエコーを処理することによりフレーム単位で生成される時系列のISAR(Inverse Synthetic Aperture Radar:逆合成開口レーダ)画像を順次入力する。このISAR画像には、識別対象の未知の船舶が含まれている。なお入力部102は、船舶(広義には、目標)と関係のない背景などを予め取り除いたISAR画像を入力するようにしてもよい。この場合、後述の目標抽出部106による処理が不要となる。
【0013】
本実施形態では、入力部102により入力されるISAR画像が、Ds(Ds≧1)次元のベクトルで表されるデータであり、ベクトルの各要素が輝度値である場合を例に取り説明する。例えば、入力部102により入力されるISAR画像Xは、(X1,X2,…,XDs)で表されるものとする。但し、入力部102により入力される画像は、これに限定されるものではない。
【0014】
入力受付部104は、入力部102から入力された画像の入力を受け付ける。本実施形態では、入力受付部104は、入力部102から、識別対象の未知の船舶が含まれる時系列のISAR画像の入力を順次受け付ける。
【0015】
目標抽出部106は、入力受付部104により受け付けられた画像から目標を抽出する。本実施形態では、目標抽出部106は、入力受付部104により受け付けられたISAR画像内に含まれる未知の船舶の領域を抽出する。
【0016】
目標抽出部106は、例えば、ISAR画像を輝度の高い領域と低い領域とに分け、輝度の高い領域を船舶の領域(広義には、目標領域)として抽出する。但し、目標の抽出手法はこれに限定されるものではない。例えば、目標抽出部106は、各ISAR画像から船舶領域の船舶の軸を検出し、検出した船舶の軸に基づいて各ISAR画像を正規化し、正規化した各ISAR画像を重畳することにより、船舶の領域を抽出するようにしてもよい。
【0017】
特徴抽出部108は、入力受付部104により受け付けられた画像から、目標抽出部106により抽出された目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。具体的には、特徴抽出部108は、特徴ベクトルとして、輝度勾配方向の共起関係を用いたベクトルを抽出する。本実施形態では、特徴抽出部108は、入力受付部104により受け付けられたISAR画像から、目標抽出部106により抽出された未知の船舶の領域の輪郭形状の特徴を表現する特徴ベクトルとして、輝度勾配方向の共起関係を用いたベクトルを抽出する。
【0018】
図2は、ISAR画像から生成した2値化画像の一例を示す図である。図3は、輝度勾配方向の共起関係を用いたベクトルの抽出手法の一例の説明図である。図4は、船舶の輝度勾配方向の一部を表示した例を示す図である。
【0019】
特徴抽出部108は、例えば、ISAR画像から、船舶の領域の画素を1、船舶の領域以外の画素を0とした2値化画像を生成し(図2参照)、生成した2値化画像を小領域に分割し(図3左図参照)、分割した小領域毎に次の処理を行う。具体的には、特徴抽出部108は、小領域中の各ピクセルの輝度勾配を計算し、計算した輝度勾配の中から予め定めたオフセット毎に当該オフセットを持つ2つの輝度勾配のペアの出現頻度を計算する(図3中央図参照)。そして特徴抽出部108は、オフセット及び輝度勾配のペア毎の出現頻度を並べることにより(図3右図参照)、輝度勾配方向の共起関係を用いたベクトル、即ち、特徴ベクトルを抽出する(図4参照)。図4に示す例では、艦橋から横に砲身が突き出ているが、砲身の下の空間も表現できている。なお、特徴抽出部108は、2値化画像の代わりに、ISAR画像から、船舶の領域の画素の輝度をそのままとし、船舶の領域以外の画素の輝度を0とした画像を生成してもよい。この画像からでも上記と同様の手法で輝度勾配方向の共起関係を用いたベクトルを抽出できる。
【0020】
評価基準記憶部110は、後述の選択部126及び学習部128により生成される評価基準を記憶する。本実施形態では、評価基準記憶部110は、識別器Fi(x)(1≦i≦N(N≧2))を有する評価基準{F1(x),F2(x),…,FN(x)}を記憶する。
【0021】
特徴量計算部112は、評価基準記憶部110に記憶されている評価基準を用いて、特徴抽出部108により抽出された特徴ベクトルの特徴量を計算する。
【0022】
本実施形態では、評価基準記憶部110に記憶されている評価基準{F1(x),F2(x),…,FN(x)}に含まれるそれぞれの識別器Fi(x)が、特徴ベクトルに対し、数式(1)に示すように評価値siを返却するものとする。ここで、後述の学習部128により、いずれの学習手法を用いて識別器Fi(x)が学習された場合であっても、識別器Fi(x)の出力は、識別対象のグループに属する尤度などとして表されるため、数式(1)を満たす。
【0023】
Fi(X)=si …(1)
【0024】
なお本実施形態では、評価値siがスカラー量である場合を例に取り説明するが、これに限定されるものではなく、例えば、複数の要素を持つベクトルであってもよい。また、後述する内容は、評価値siがベクトルであっても同様に適用できる。例えば、後述の学習部128により、3個以上のグループを識別する学習手法を用いて識別器Fi(x)が学習された場合、識別器Fi(x)の出力は、識別対象のグループに含まれる各カテゴリに帰属する尤度を要素に持つようなベクトルとなる。
【0025】
図5は、特徴ベクトルYの特徴量v(Y)の計算手法の一例の説明図である。特徴量計算部112は、図5に示すように、特徴抽出部108により抽出された特徴ベクトルYを評価基準記憶部110に記憶されている評価基準{F1(x),F2(x),…,FN(x)}に適用して、評価値siを取得し、取得した評価値siから特徴ベクトルYの特徴量v(Y)を計算する。本実施形態では、特徴量計算部112は、図5及び数式(2)に示すように、全ての評価値siを1つに並べることで特徴ベクトルYの特徴量v(Y)を計算する。
【0026】
v(Y)=(s1,s2,…,sN) …(2)
【0027】
例えば、識別器Fi(x)が2つのクラスを判別し、評価値siとして0又は1を出力する関数であるとする。この場合、特徴量計算部112は、特徴抽出部108により抽出された特徴ベクトルYの特徴量を、例えば、v(Y)=(1,1,0,1,0,…,1)のように、0と1との組み合わせで表現されたベクトルとして計算する。また特徴量計算部112は、特徴抽出部108により抽出された特徴ベクトルY’(Y’≠Y)の特徴量を計算すると、例えば、v(Y’)=(0,1,1,1,0,…,0)のように、やはり0と1との組み合わせで表現されたベクトルとして計算するが、計算した特徴量は特徴ベクトルYの特徴量と異なるものになる。つまり、この例では、0と1との組み合わせで表現されたベクトルが、ISAR画像に含まれる船舶が有する固有の特徴量となり、船舶の識別に有効な特徴量となる。なお、識別器Fi(x)が2つ以上のクラスを判別し、評価値siとして0及び1以外の実数を出力する関数である場合であっても、上記と同様である。
【0028】
但し、特徴量の計算手法は上述の手法に限定されるものではなく、取得した評価値siをどのように用いて特徴量を計算しても構わない。
【0029】
なお、評価値siがベクトルの場合、特徴ベクトルYの特徴量v(Y)は、評価値siが持つ各要素を並べたものとなる。つまり、評価値siの次元数をdiとすると、特徴ベクトルYの特徴量v(Y)の次元数Dは、次元数diの総和となる(D=d1+…+dN)。なお、各評価値siの次元数diは、全て同じ値でもよいし、それぞれ異なっていてもよい。
【0030】
また、特徴量計算部112は、特徴量v(Y)を評価値siのヒストグラムとして計算するようにしてもよい。具体的には、特徴量計算部112は、評価値siを離散化(必要なら要素毎に)しておき、その値に該当するビンに対して投票することでヒストグラム特徴量v(Y)を計算することができる。
【0031】
なお、評価値siがベクトルの場合、特徴量計算部112は、次元数diのヒストグラムとすることでヒストグラム特徴量v(Y)を計算することができる。また、スカラー量とベクトルのように次元数の異なる評価値siが混在している場合、特徴量計算部112は、同種の評価値si毎にヒストグラム特徴量を計算しておき、計算したヒストグラム特徴量を1つのベクトルとして並べることでヒストグラム特徴量v(Y)を計算することができる。
【0032】
また、特徴量計算部112は、評価値siを1つに並べてベクトル化した特徴量と、評価値siをヒストグラム化したヒストグラム特徴量とを、更に1つのベクトルとして並べる(連結する)ことで特徴量v(Y)を計算するようにしてもよい。また、特徴量計算部112は、評価値siに非線形な変換を施して特徴量を計算するようにしてもよい。また、特徴量計算部112は、計算した特徴量に対して、平均を0にしたり、2乗平均を1にしたりするなどの正規化を行うようにしてもよい。
【0033】
識別テーブル記憶部114は、識別基準となる各識別特徴量にカテゴリを対応付けた識別テーブルを記憶する。ここで、カテゴリとは、目標を識別する際の種類を表し、目標が船舶の場合には、船舶の名称、種類、又は大きさなどが該当する。識別特徴量及びカテゴリの組は、予め識別テーブルに登録されていてもよい。また、特徴量計算部112が、既知の船舶が含まれるISAR画像から抽出された特徴ベクトルの特徴量を計算し、計算した特徴量を識別特徴量として、既知の船舶が属するカテゴリに対応付けて識別テーブルに登録するようにしてもよい。
【0034】
図6は、識別テーブルの一例を示す図である。図6に示す例では、カテゴリAとカテゴリAに属するか否かの識別基準となる識別特徴量v’(A)=(a1,a2,…,aN)が対応付けられており、カテゴリBとカテゴリBに属するか否かの識別基準となる識別特徴量v’(B)=(b1,b2,…,bN)が対応付けられている。
【0035】
類似度計算部116は、特徴量計算部112により計算された特徴量と識別テーブル記憶部114に記憶されている識別特徴量との類似度を計算する。本実施形態では、類似度計算部116は、数式(3)を用いて、特徴量計算部112により計算された特徴量v(Y)と識別テーブル記憶部114に記憶されている各識別特徴量(識別特徴量v’(A)及び識別特徴量v’(B)など)との類似度を計算する。
【0036】
L=(α,β)/||α||||β|| …(3)
【0037】
ここで、数式(3)は、ベクトルαとベクトルβとの単純類似度を計算する数式である。(α,β)は、ベクトルαとベクトルβとの内積を示し、||α||、||β||は、それぞれベクトルα、ベクトルβのノルムを示す。例えば、特徴量v(Y)と識別特徴量v’(A)との類似度Lは、数式(3)より、L=(v(Y),v’(A))/||v(Y)||||v’(A)||となる。
【0038】
なお、類似度計算部116は、ベクトル間の距離を計算する数式(4)又は数式(5)を用いて、特徴量計算部112により計算された特徴量v(Y)と識別テーブル記憶部114に記憶されている各識別特徴量(識別特徴量v’(A)及び識別特徴量v’(B)など)との類似度を計算するようにしてもよい。
【0039】
【数1】
【0040】
【数2】
【0041】
識別部118は、類似度計算部116により計算された類似度を用いて、目標を識別する。具体的には、識別部118は、類似度計算部116により計算された類似度を用いて、画像に含まれる未知の目標を同定するか、又は未知の目標が属する複数の候補を特定する。本実施形態では、識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度Lの値が大きい順、即ち、類似度の高い順に所定数の識別特徴量を選択する。そして識別部118は、選択した所定数の識別特徴量に対応するカテゴリの少なくともいずれかに、ISAR画像に含まれる船舶が属すると識別する。なお識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度Lが閾値を超えた識別特徴量のうち類似度の高い順に所定数の識別特徴量を選択するようにしてもよい。
【0042】
また、類似度計算部116が、ベクトル間の距離を計算する数式(4)又は数式(5)を用いて類似度Lを計算した場合、ベクトル間の距離が短いほど、即ち、類似度Lの値が小さいほど類似度が高くなる。この場合であれば、識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度Lの値が小さい順に所定数の識別特徴量を選択する。なお、識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度Lが閾値よりも小さい識別特徴量のうち類似度Lの値が小さい順に所定数の識別特徴量を選択するようにしてもよい。
【0043】
出力制御部120は、識別部118の識別結果を出力部122に出力させる。本実施形態では、出力制御部120は、識別部118によりISAR画像に含まれる船舶が少なくともいずれかに属すると識別されたカテゴリを出力部122に出力させる。
【0044】
出力部122は、出力制御部120により制御され、識別部118の識別結果を出力する。
【0045】
学習サンプル記憶部124は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルを記憶する。本実施形態では、学習サンプルが、船舶の領域の輪郭形状の特徴を表現する特徴ベクトルの特徴量である場合を例に取り説明するが、学習サンプルはこれに限定されるものではない。特徴量(広義には、学習サンプル)は、予め学習サンプル記憶部124に記憶されていてもよい。また、特徴量計算部112が、船舶が含まれるISAR画像から抽出された特徴ベクトルの特徴量を計算し、計算した特徴量を学習サンプル記憶部124に記憶するようにしてもよい。
【0046】
本実施形態では、学習サンプル記憶部124は、M(M≧2)個の特徴量を記憶している。なお、特徴量のカテゴリはC(C≧2)用意され、M個の特徴量はカテゴリ毎にMh(1≦h≦C)個の特徴量に分類されるものとする。つまり、M=M1+…+MCとなる。ここで、カテゴリは、前述したように、目標を識別する際の種類を表し、目標が船舶の場合には、船舶の名称、種類、又は大きさなどが該当する。つまり、M個の特徴量の中に種類αの船舶の特徴量と種類βの船舶の特徴量と種類γの船舶の特徴量との計3種類の船舶の特徴量が含まれていれば、C=3となる。
【0047】
選択部126は、学習サンプル記憶部124から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。特に選択部126は、選択する複数のグループのそれぞれに含まれる学習サンプルのカテゴリ数又はサンプル数が略同数となるように、当該複数のグループを選択する。具体的には、選択部126は、選択する複数のグループのそれぞれに含まれる学習サンプルのカテゴリ数又はサンプル数のグループ間の差が予め定められた範囲内に収まるように、当該複数のグループを選択する。なお本実施形態では、選択部126が、学習サンプル記憶部124から学習サンプルを無作為に選択(ランダムサンプリング)するものとする。これにより、選択部126により選択される複数のグループに含まれる学習サンプルのカテゴリは、選択部126の選択処理毎に異なることが期待できる。但し、学習サンプルの選択手法はこれに限定されるものではなく、選択する複数のグループに含まれる学習サンプルのカテゴリが選択処理毎に異なることが期待できれば、どのような選択基準で選択してもよい。
【0048】
本実施形態では、選択部126は、学習サンプル記憶部124から、各グループが特徴量を1個以上含むようにK(K=2)個のグループを無作為に選択する選択処理をN(N≧2)回行う。特に選択部126は、選択処理を行う際、K個のグループのそれぞれに含まれる特徴量のカテゴリ数が同数となるように、K個のグループを無作為に選択する。なお、Kの値は2以上であってもよい。
【0049】
このため選択部126は、学習サンプル記憶部124から特徴量を完全に無作為に選択するのではなく、カテゴリの特徴量の個数に応じて重み付けを行ってK個のグループ間の特徴量の個数の差を小さくするように調整したり、カテゴリの特徴量の個数に関わらずある一定の個数の特徴量を抽出するようにしたりしてもよい。なお、特徴量の個数を一定にする場合、選択部126は、さらに単純にカテゴリから特徴量を無作為に選択するようにしてもよいし、学習サンプルとしてまだ選択されていない未選択の特徴量をカテゴリから優先的に選択するようにしてもよい。
【0050】
学習部128は、選択部126により選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、学習した複数の識別基準を含む評価基準を生成する。本実施形態では、学習部128は、選択部126により選択されたK個のグループ毎に当該K個のグループを識別する識別器Fi(x)(1≦i≦N)を学習し、学習したN個の識別器を含む評価基準{F1(x),F2(x),…,FN(x)}を生成し、評価基準記憶部110に記憶する。
【0051】
学習部128により生成された評価基準{F1(x),F2(x),…,FN(x)}は、ISAR画像内に含まれる船舶の識別に用いられる。具体的には、評価基準{F1(x),F2(x),…,FN(x)}に含まれるN個の識別器Fi(x)のそれぞれが、識別対象のISAR画像(詳細には、ISAR画像内に含まれる船舶)に対する評価値を出力する。評価値は、例えば、識別器が予め学習したいずれのクラスに属するかを示す尤度やクラス番号などが該当する。そして、出力された複数の評価値がISAR画像内に含まれる船舶の特徴量として利用されることにより、船舶の識別に用いられる。
【0052】
本実施形態では、学習部128は、サポートベクターマシンにより、K個のグループを識別する識別器Fi(x)を学習する。サポートベクターマシンは、2クラスのパターン識別器を構成する手法である。サンプルから、各データとの距離が最大となる分離平面を求め、マージンを最大化するという基準で学習する。但し、識別器の学習手法はこれに限定されるものではなく、既存の学習手法を用いることができる。例えば、学習部128は、ブースティングなどの学習手法を用いることができる。また例えば、選択部126により選択された3個のグループを識別する識別器を学習する場合であれば、学習部128は、k近傍識別器、ベイズ分類、又はニューラルネットワークなどの学習手法を用いることができる。
【0053】
図7は、評価基準の生成手法の一例を示す説明図である。なお、図7に示す例では、S1〜SM(M≧11)が、学習サンプル(特徴量)を示し、C=Mであるものとする。つまり、図7に示す例では、全ての学習サンプルのカテゴリが異なるものとする。また、図7に示す例では、K=2であるものとする。つまり、図7に示す例では、選択部126は、各グループに含まれる学習サンプルのカテゴリ数が2となるように、即ち、C=Mであるため、各グループに含まれる学習サンプル数が2となるように、2個のグループを選択する。
【0054】
図7に示す例では、選択部126は、1回目の選択処理で、学習サンプルS1及びS5を含むグループ151aと、学習サンプルS2及びS7を含むグループ151bとを、選択している。また、選択部126は、2回目の選択処理で、学習サンプルS3及びS8を含むグループ152aと、学習サンプルS10及びSMを含むグループ152bとを、選択している。また、選択部126は、N回目の選択処理で、学習サンプルS4及びS9を含むグループ153aと、学習サンプルS6及びS7を含むグループ153bとを、選択している。
【0055】
また、学習部128は、選択部126により1回目の選択処理で選択されたグループ151aとグループ151bとを識別する識別器F1(x)を学習している。また、学習部128は、選択部126により2回目の選択処理で選択されたグループ152aとグループ152bとを識別する識別器F2(x)を学習している。また、学習部128は、選択部126によりN回目の選択処理で選択されたグループ153aとグループ153bとを識別する識別器FN(x)を学習している。これにより、学習部128は、学習したN個の識別器を含む評価基準{F1(x),F2(x),…,FN(x)}を生成する。
【0056】
図8は、本実施形態の識別装置100で行われる識別処理の手順の流れの一例を示すフローチャート図である。
【0057】
まず、入力受付部104は、入力部102から、識別対象の未知の船舶が含まれるISAR画像の入力を受け付ける(ステップS100)。
【0058】
続いて、目標抽出部106は、入力受付部104により受け付けられたISAR画像から未知の船舶を抽出する(ステップS102)。
【0059】
続いて、特徴抽出部108は、入力受付部104により受け付けられたISAR画像から、目標抽出部106により抽出された未知の船舶の輪郭形状の特徴を表現する特徴ベクトル(輝度勾配方向の共起関係を用いたベクトル)を抽出する(ステップS104)。
【0060】
続いて、特徴量計算部112は、評価基準記憶部110に記憶されている評価基準を用いて、特徴抽出部108により抽出された特徴ベクトルの特徴量を計算する(ステップS106)。
【0061】
続いて、類似度計算部116は、特徴量計算部112により計算された特徴量と識別テーブル記憶部114に記憶されている各識別特徴量との類似度を計算する(ステップS108)。
【0062】
続いて、識別部118は、識別テーブル記憶部114に記憶されている識別テーブルから、類似度計算部116により計算された類似度が上位の識別特徴量を選択し、選択した識別特徴量に対応するカテゴリの少なくともいずれかに、ISAR画像に含まれる船舶が分類されると識別する(ステップS110)。
【0063】
続いて、出力制御部120は、識別部118の識別結果、即ち、識別部118によりISAR画像に含まれる船舶が少なくともいずれかに分類されると識別されたカテゴリを出力部122に出力させる(ステップS112)。
【0064】
図9は、本実施形態の識別装置100で行われる学習処理の手順の流れの一例を示すフローチャート図である。
【0065】
まず、選択部126は、学習サンプル記憶部124から、それぞれ特徴量を1つ以上含む2つのグループを選択する(ステップS200)。この際、選択部126は、選択する2つのグループのそれぞれに含まれる特徴量のカテゴリ数のグループ間の差が予め定められた範囲内に収まるように、当該2つのグループを選択する。
【0066】
続いて、学習部128は、選択部126により選択された2つのグループを識別する識別基準を学習する(ステップS202)。
【0067】
続いて、選択部126は、例えば、選択がN回行われていない場合には、選択を続行すると判定し(ステップS204でYes)、ステップS200に戻り、選択がN回行われている場合には、選択を続行しないと判定し(ステップS204でNo)、ステップS206へ進む。
【0068】
続いて、学習部128は、ステップS202で学習した複数の識別基準を含む評価基準を生成し、評価基準記憶部110に格納する(ステップS206)。
【0069】
図10は、本実施形態の識別装置100で行われる学習サンプル格納処理の手順の流れの一例を示すフローチャート図である。なお、学習サンプル格納処理は、図8の識別処理中に行ってもよいし、図8の識別処理と別々に行ってもよい。
【0070】
まず、ステップS300〜S306までの処理は、図8のフローチャートのステップS100〜S106までの処理と同様である。
【0071】
ステップS307では、特徴量計算部112は、計算した特徴量を学習サンプルとして学習サンプル記憶部124に格納する。
【0072】
図11は、本実施形態の識別装置100で行われる識別特徴量登録処理の手順の流れの一例を示すフローチャート図である。
【0073】
まず、入力受付部104は、入力部102から、既知の船舶が含まれるISAR画像の入力を受け付ける(ステップS400)。
【0074】
続いて、目標抽出部106は、入力受付部104により受け付けられたISAR画像から既知の船舶を抽出する(ステップS402)。
【0075】
続いて、特徴抽出部108は、入力受付部104により受け付けられたISAR画像から、目標抽出部106により抽出された既知の船舶の輪郭形状の特徴を表現する特徴ベクトル(輝度勾配方向の共起関係を用いたベクトル)を抽出する(ステップS404)。
【0076】
続いて、特徴量計算部112は、評価基準記憶部110に記憶されている評価基準を用いて、特徴抽出部108により抽出された特徴ベクトルの特徴量を計算する(ステップS406)。
【0077】
続いて、特徴量計算部112は、計算した特徴量を、既知の船舶が属するカテゴリの識別特徴量として、当該カテゴリに対応付けて識別テーブルに登録する(ステップS407)。
【0078】
図12は、本実施形態の識別装置100のハードウェア構成の一例を示すブロック図である。図12に示すように、本実施形態の識別装置100は、CPU902と、ISAR画像に含まれる未知の船舶を識別するための識別プログラムなどを記憶するROM904と、RAM906と、評価基準や識別テーブルなどを記憶するHDD908と、HDD908とのインタフェースであるI/F910と、ISAR画像入力用のインタフェースであるI/F912と、マウスやキーボードなどの入力装置914と、入力装置914とのインタフェースであるI/F916と、ディスプレイなどの表示装置918と、表示装置918とのインタフェースであるI/F920と、バス922とを、備えており、通常のコンピュータを利用したハードウェア構成となっている。なおCPU902、ROM904、RAM906、I/F910、I/F912、I/F916、及びI/F920は、バス922を介して互いに接続されている。
【0079】
識別装置100では、CPU902が、ROM904から識別プログラムをRAM906上に読み出して実行することにより、上記各部(入力受付部、目標抽出部、特徴抽出部、特徴量計算部、類似度計算部、識別部、出力制御部など)がコンピュータ上で実現され、HDD908に記憶されている評価基準や識別テーブルなどを用いて、I/F912から入力されるISAR画像に含まれる未知の船舶を識別する。
【0080】
なお、識別プログラムはHDD908に記憶されていてもよい。また、識別プログラムは、インストール可能な形式又は実行可能な形式のファイルでCD−ROM、CD−R、メモリカード、DVD、フレキシブルディスク(FD)等のコンピュータで読み取り可能な記憶媒体に記憶されて提供されるようにしてもよい。また、識別プログラムを、インターネット等のネットワークに接続されたコンピュータ上に格納し、ネットワーク経由でダウンロードさせることにより提供するようにしてもよい。また、識別プログラムを、インターネット等のネットワーク経由で提供または配布するようにしてもよい。また、評価基準や識別テーブルは、ROM904に記憶されていてもよい。また、ISAR画像をHDD908に記憶しておき、I/F910からISAR画像を入力するようにしてもよい。
【0081】
以上のように、本実施形態の識別装置100では、複数のグループ毎に、当該複数のグループを識別する識別基準、即ち各グループに含まれる学習サンプルのカテゴリ又はカテゴリの組み合わせをグループ間で識別する識別基準を学習する。そして本実施形態の識別装置100では、複数のグループの選択、即ち、各グループに含まれる学習サンプルのカテゴリ又はカテゴリの組み合わせの選択は、選択部126により自動的に行われる。このため、本実施形態の識別装置100によれば、人間が識別基準を教示する必要がなく、識別基準の学習に伴うコストを削減することができる。
【0082】
また本実施形態の識別装置100では、グループの組み合わせ数、即ち、グループに含まれる学習サンプルのカテゴリ又はカテゴリの組み合わせのグループ間の組み合わせ数は、膨大な数になる傾向にある。このため、本実施形態の識別装置100によれば、上限にとらわれず、必要なだけ識別基準を学習して、評価基準を生成することができる。また、多くの識別基準を用いることで、過学習が原因で発生する誤認識を分散させ、その影響を抑えることができる。特に本実施形態の識別装置100では、過学習が生じにくいサポートベクターマシンを用いて識別基準を学習する場合を例示しており、この場合、過学習が生じる可能性をより低くすることができる。
【0083】
また本実施形態の識別装置100では、選択部126は、選択する複数のグループのそれぞれに含まれる学習サンプルのカテゴリ数又はサンプル数のグループ間の差が予め定められた範囲内に収まるように、当該複数のグループを無作為に選択する。つまり本実施形態の識別装置100では、識別対象の複数のグループのそれぞれを無作為かつ均等な分布を有するように選択する。このようにして選択された複数のグループを識別するように学習された識別基準は、識別対象の目標の特徴量に対する評価値、即ち、学習に用いた複数のグループのいずれに属すると判定されるかが完全にランダムとなる。
【0084】
従って、例えば、2つの目標それぞれの特徴量に同一の識別基準を用いると、2つの目標が同一である場合は、評価値の値が同一となること、即ち、両目標が識別対象の複数のグループのうちのいずれかのグループに類似することが期待できる。一方、2つの目標が異なる場合は、評価値の値がどのような値となるかは不定、即ち、無相関となる。ここで、互いに異なる2つの目標それぞれの特徴量に対する評価値が無相関であるということは、例えば、目標識別を行う際の類似度計算に正規化相関などを利用した場合、類似度がゼロになるということを示す。
【0085】
つまり、本実施形態の識別装置100では、選択する複数のグループのそれぞれに含まれる学習サンプルのカテゴリ数又はサンプル数のグループ間の差が予め定められた範囲内に収まるように、当該複数のグループを無作為に選択することにより、この複数のグループを識別する識別基準には、異なる目標の類似度を分離するような変換が、組み込まれているという特徴を持つ。
【0086】
従って、本実施形態の識別装置100によれば、画像に含まれる目標を識別するために有効、即ち、目標識別の識別精度において好適な識別基準を含む評価基準を学習サンプルから効率的かつ高速に学習することができる。
【0087】
そして本実施形態の識別装置100では、このような評価基準を用いて、ISAR画像に含まれる未知の船舶の輪郭形状の特徴を表現する特徴ベクトルを特徴量に変換するため、特徴ベクトルが輝度勾配方向の共起関係を用いたベクトルなど高次元のベクトルであったとしても、精度のよい特徴量に変換でき、目標の識別精度を高くすることができる。
【0088】
また本実施形態の識別装置100では、評価基準を効率的かつ高速に学習することができるため、評価基準を用いて計算した特徴量を更に学習サンプルとして用いて評価基準の学習を再帰的に行うことも容易に実現でき、評価基準の性能を更に高めることができる。
【0089】
特に本実施形態では、ベクトルの次元の大きさではなくサンプル数に応じて学習にかかる時間が決まるサポートベクターマシンを用いて識別基準を学習しているため、評価基準をより高速に学習することができる。
【0090】
以上のように本実施形態によれば、目標の識別精度を高くすることができる。
【0091】
なお、本発明は、上記実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化することができる。また、上記実施の形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成することができる。例えば、実施の形態に示される全構成要素からいくつかの構成要素を削除してもよい。さらに、異なる実施の形態にわたる構成要素を適宜組み合わせても良い。
【0092】
例えば、上記実施形態のフローチャートにおける各ステップを、その性質に反しない限り、実行順序を変更し、複数同時に実施し、あるいは実施毎に異なった順序で実施してもよい。
【0093】
また例えば、上記実施形態では、識別装置が識別処理と学習処理の両処理を行う例について説明したが、識別処理、学習処理を、別々の装置で行うようにしてもよい。例えば、識別処理、学習処理を、それぞれ識別装置、学習装置が行うようにしてもよい。この場合、学習装置で生成した評価基準を識別装置に格納しておけばよい。
【0094】
また例えば、上記実施形態では、学習サンプルが、船舶の領域の輪郭形状の特徴を表現する特徴ベクトルの特徴量である場合を例に取り説明したが、学習サンプルは、船舶が含まれるISAR画像であってもよい。この場合、選択部が、選択したISAR画像を後に、選択したISAR画像に含まれる目標の特徴ベクトルを抽出し、抽出した特徴ベクトルを特徴量に変換し、学習部が、変換された特徴量を用いて学習すればよい。
【符号の説明】
【0095】
100 識別装置
102 入力部
104 入力受付部
106 目標抽出部
108 特徴抽出部
110 評価基準記憶部
112 特徴量計算部
114 識別テーブル記憶部
116 類似度計算部
118 識別部
120 出力制御部
122 出力部
124 学習サンプル記憶部
126 選択部
128 学習部
902 CPU
904 ROM
906 RAM
908 HDD
910 I/F
912 I/F
914 入力装置
916 I/F
918 表示装置
920 I/F
922 バス
【特許請求の範囲】
【請求項1】
各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルを記憶する学習サンプル記憶部から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う選択部と、
選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、学習した複数の識別基準を含む評価基準を生成する学習部と、
目標からのレーダエコーに基づく画像の入力を受け付ける入力受付部と、
前記画像から前記目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する特徴抽出部と、
前記評価基準を用いて、前記特徴ベクトルの特徴量を計算する特徴量計算部と、
前記特徴量と識別基準となる識別特徴量との類似度を計算する類似度計算部と、
前記類似度を用いて、前記目標を識別する識別部と、
識別結果を出力部に出力させる出力制御部と、
を備えることを特徴とする識別装置。
【請求項2】
前記特徴ベクトルは、輝度勾配方向の共起関係を用いたベクトルであることを特徴とする請求項1に記載の識別装置。
【請求項3】
前記学習部は、サポートベクターマシンにより前記識別基準を学習することを特徴とする請求項1又は2に記載の識別装置。
【請求項4】
各識別特徴量にカテゴリを対応付けた識別テーブルを記憶する識別テーブル記憶部を更に備え、
前記類似度計算部は、前記特徴量と前記各識別特徴量との類似度を計算し、
前記識別部は、類似度の高い順に所定数の識別特徴量を選択し、選択した前記所定数の識別特徴量に対応するカテゴリの少なくともいずれかに前記目標が属すると識別することを特徴とする請求項1〜3のいずれか1つに記載の識別装置。
【請求項5】
前記画像から前記目標を抽出する目標抽出部を更に備えることを特徴とする請求項1〜4のいずれか1つに記載の識別装置。
【請求項6】
目標からのレーダエコーに基づく画像の入力を受け付ける入力受付部と、
前記画像から前記目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する特徴抽出部と、
各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理が複数回行われ、選択された複数のグループ毎に当該複数のグループを識別する識別基準が学習されることにより生成された複数の識別基準を含む評価基準を記憶する評価基準記憶部に記憶されている前記評価基準を用いて、前記特徴ベクトルの特徴量を計算する特徴量計算部と、
前記特徴量と識別基準となる識別特徴量との類似度を計算する類似度計算部と、
前記類似度を用いて、前記目標を識別する識別部と、
識別結果を出力部に出力させる出力制御部と、
を備えることを特徴とする識別装置。
【請求項7】
前記特徴ベクトルは、輝度勾配方向の共起関係を用いたベクトルであることを特徴とする請求項6に記載の識別装置。
【請求項8】
各識別特徴量にカテゴリを対応付けた識別テーブルを記憶する識別テーブル記憶部を更に備え、
前記類似度計算部は、前記特徴量と前記各識別特徴量との類似度を計算し、
前記識別部は、類似度の高い順に所定数の識別特徴量を選択し、選択した前記所定数の識別特徴量に対応するカテゴリの少なくともいずれかに前記目標が属すると識別することを特徴とする請求項6又は7に記載の識別装置。
【請求項9】
前記画像から前記目標を抽出する目標抽出部を更に備えることを特徴とする請求項6〜8のいずれか1つに記載の識別装置。
【請求項1】
各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルを記憶する学習サンプル記憶部から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う選択部と、
選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、学習した複数の識別基準を含む評価基準を生成する学習部と、
目標からのレーダエコーに基づく画像の入力を受け付ける入力受付部と、
前記画像から前記目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する特徴抽出部と、
前記評価基準を用いて、前記特徴ベクトルの特徴量を計算する特徴量計算部と、
前記特徴量と識別基準となる識別特徴量との類似度を計算する類似度計算部と、
前記類似度を用いて、前記目標を識別する識別部と、
識別結果を出力部に出力させる出力制御部と、
を備えることを特徴とする識別装置。
【請求項2】
前記特徴ベクトルは、輝度勾配方向の共起関係を用いたベクトルであることを特徴とする請求項1に記載の識別装置。
【請求項3】
前記学習部は、サポートベクターマシンにより前記識別基準を学習することを特徴とする請求項1又は2に記載の識別装置。
【請求項4】
各識別特徴量にカテゴリを対応付けた識別テーブルを記憶する識別テーブル記憶部を更に備え、
前記類似度計算部は、前記特徴量と前記各識別特徴量との類似度を計算し、
前記識別部は、類似度の高い順に所定数の識別特徴量を選択し、選択した前記所定数の識別特徴量に対応するカテゴリの少なくともいずれかに前記目標が属すると識別することを特徴とする請求項1〜3のいずれか1つに記載の識別装置。
【請求項5】
前記画像から前記目標を抽出する目標抽出部を更に備えることを特徴とする請求項1〜4のいずれか1つに記載の識別装置。
【請求項6】
目標からのレーダエコーに基づく画像の入力を受け付ける入力受付部と、
前記画像から前記目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する特徴抽出部と、
各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理が複数回行われ、選択された複数のグループ毎に当該複数のグループを識別する識別基準が学習されることにより生成された複数の識別基準を含む評価基準を記憶する評価基準記憶部に記憶されている前記評価基準を用いて、前記特徴ベクトルの特徴量を計算する特徴量計算部と、
前記特徴量と識別基準となる識別特徴量との類似度を計算する類似度計算部と、
前記類似度を用いて、前記目標を識別する識別部と、
識別結果を出力部に出力させる出力制御部と、
を備えることを特徴とする識別装置。
【請求項7】
前記特徴ベクトルは、輝度勾配方向の共起関係を用いたベクトルであることを特徴とする請求項6に記載の識別装置。
【請求項8】
各識別特徴量にカテゴリを対応付けた識別テーブルを記憶する識別テーブル記憶部を更に備え、
前記類似度計算部は、前記特徴量と前記各識別特徴量との類似度を計算し、
前記識別部は、類似度の高い順に所定数の識別特徴量を選択し、選択した前記所定数の識別特徴量に対応するカテゴリの少なくともいずれかに前記目標が属すると識別することを特徴とする請求項6又は7に記載の識別装置。
【請求項9】
前記画像から前記目標を抽出する目標抽出部を更に備えることを特徴とする請求項6〜8のいずれか1つに記載の識別装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−128558(P2012−128558A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−278018(P2010−278018)
【出願日】平成22年12月14日(2010.12.14)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月14日(2010.12.14)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]