
警報装置
【課題】車両の死角を含む車両の周囲からの他の移動体の接近を、その接近方向と共に検出して、接近方向を含めて報知する。
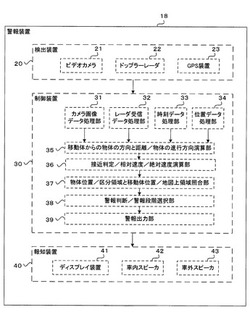
【解決手段】移動体の周囲の物体を検出した場合に検出信号を出力する複数の検出手段20と、複数の検出手段20による各検出信号の検出時期に基づき、移動体に対する物体の距離、検出された方向、及び、移動体における物体のある方向の危険度のうち少なくとも何れか2つを判断する制御手段30と、物体が接近中である場合に、移動体における物体がある方向の危険度を報知する報知手段40とを含む警報装置18。
【解決手段】移動体の周囲の物体を検出した場合に検出信号を出力する複数の検出手段20と、複数の検出手段20による各検出信号の検出時期に基づき、移動体に対する物体の距離、検出された方向、及び、移動体における物体のある方向の危険度のうち少なくとも何れか2つを判断する制御手段30と、物体が接近中である場合に、移動体における物体がある方向の危険度を報知する報知手段40とを含む警報装置18。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体の周囲の危険を運転手に警告する警報装置に関する。
【背景技術】
【0002】
サイドミラーやルームミラーの死角を補償するために、両サイドミラーの代わりの左右側面後方撮像カメラと、ルームミラーの代わりの後方撮像カメラとを備えた車両用周囲状況表示装置が知られている(例えば、特許文献1参照)。特許文献1の装置では、車両の周囲状況をカメラ画像から検出し、検出された車両の周囲状況を画面上に画像表示し、車両に対して相対移動する移動体を検出する。そして、そのように周囲の車両を検出できることにより運転手の死角範囲を小さくできる。また、検出された移動体の情報に基づいて、移動体の画面上での位置を計算し、画面中の移動体の画像領域を強調表示することで、間接視界中の危険な要因を即座に認識することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−223487号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、例えば、車両の運転手は、運転中は画面を常時注視することが難しいので、特許文献1の車両用周囲状況表示装置のように画面中の移動体の画像領域を強調表示しても、運転手がその画面中に瞬間的に表示される移動体に気付くとは限らない。特に、右折や左折等の曲がり角等や車庫入れ等ではハンドル操作中には画面の表示を見ることは非常に困難であり、移動体の接近を知ることが難しい。また、例えば、ハンドル操作中に画面中の移動体に気付いたとしても、表示された画像内容から瞬時に、どの方向から移動体が接近中かを判断することは難しい。また、自車の進行方向に直角に近い横方向やフロント側のAピラー等による斜め前の死角から接近する他の移動体、車両のサイドミラー下側や、車両の前方下側の障害物の検出については示されていない。
【0005】
本発明は、車両の横方向や斜め前の死角を含む車両の周囲からの他の移動体の接近を、その接近方向と共に検出して、接近方向を含めて報知する警報装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)上記課題を解決するために、本発明に係る警報装置は、移動体の周囲の物体を検出した場合に検出信号を出力する複数の検出手段と、前記複数の検出手段による各検出信号の検出時期に基づき、移動体に対する物体の距離、検出された方向、及び、移動体における物体のある方向の危険度のうち少なくとも何れか2つを判断する制御手段と、前記判断結果に基づき当該移動体における前記物体がある方向の危険度を報知する報知手段とを含む。
本態様の警報装置によれば、移動体に対する物体の方向と距離と検出時期から、物体がどの方向から接近中であるかわかるので、運転手は、危険に対してハンドル操作やブレーキ/アクセル等を、物体との衝突を回避する方向に適切に危険回避操作させることができる。
【0007】
(2)好ましくは、制御手段は、前記物体の進行方向、前記移動体へ前記物体が接近中か否か、についても判断するようにするとよい。
本態様の警報装置によれば、物体の接近判断及び危険度を報知する精度を高める事ができる。
【0008】
(3)好ましくは、本発明に係る警報装置では、検出手段は、光学的に物体を撮像するカメラであり、制御手段は、検出信号として撮像された画像情報を用いるようにするとよい。
本態様の警報装置によれば、検出手段をカメラにすることで、物体の外形を画像認識でき、画像の撮像時期に差(例えば撮像時刻に差)のある画像の変化から物体を検出することで移動方向(ベクトル)を正確に検出できる。なお、制御手段は、検出手段の検出信号の状態を、報知手段で報知させる制御をするとよい。(3)のようにすれば、検出手段であるカメラからの物体の画像をディスプレイ装置に表示する構成とすることもできる。このようにすれば、運転手は物体が何かを撮像画像から確認できる。また、画像に移動体の一部等の基準画像を映すことで物体との大きさ比較ができ、物体の大きさを検出することができる。
【0009】
(4)好ましくは、本発明に係る警報装置では、検出手段は、電磁波を送受信して物体を検出するドップラーレーダーであり、制御手段は、検出信号として受信した電磁波の信号を用いるようにするとよい。
本態様の警報装置によれば、検出手段をドップラーレーダーにすることで、夜間や暗い場所でも物体を検出でき、小さい物体、遠くの物体であっても検出でき、カメラよりも取り付け位置や取り付け角度の自由度を高くできる。
【0010】
(5)好ましくは、本発明に係る警報装置では、制御手段は、物体が、移動体からの距離により予め複数に分けられた各区分領域の何れの領域内に位置するかを判断し、報知手段は、当該判断結果に応じて異なる警報を出力するようにするとよい。
本態様の警報装置によれば、移動体からの距離と危険度が異なるように予め区分された区分領域毎に異なる報知をすることで、運転手に適切な危険回避操作をさせることができる。
【0011】
(6)好ましくは、本発明に係る警報装置では、制御手段は、検出手段の検出信号に基づき、移動体の周囲に危険度に応じた1つ以上の領域を登録し、領域と物体の位置関係を判断し、報知手段は、領域と物体の位置関係に応じて異なる警報を出力するようにするとよい。
本態様の警報装置によれば、運転手(利用者)自身が領域を登録でき、警報が登録した領域との関係で異なる警報が出力される。従って、運転手は物体の位置と領域との位置関係が容易にわかり、危険の緊急度も容易に知ることができる。
【0012】
(7)好ましくは、本発明に係る警報装置では、前記制御手段は、前記移動体の車両の大きさ、並びに、前記検出手段の前記移動体への設置高及び取付角度を利用して前記領域の初期値を登録するようにするとよい。
本態様の警報装置によれば、移動体毎に異なる領域を容易に登録できるので、危険度の判断を移動体毎に適正化することができる。
【0013】
(8)好ましくは、本発明に係る警報装置では、検出手段は、移動体の地上の位置を検出し、制御手段は、移動体が予め複数に分けられた地上の領域内に位置するかを判断し、報知手段は、移動体が異なる区分領域にある場合に異なる警報を出力するようにするとよい。
本態様の警報装置によれば、移動体の位置を検出して、子供や老人の多い施設の周辺領域では、報知する周囲区分領域を拡大したり、報知内容を異ならせたりすることで、事故の確率を減らすことができる。
【0014】
(9)好ましくは、本発明に係る警報装置では、制御手段は、さらに、物体の接近する相対速度を求め、記報知手段は、相対速度に応じて段階的警報を出力するようにするとよい。
本態様の警報装置によれば、運転手は、移動体に対して物体がどの程度の速度で接近する危険があるかわかるので、速い物体に対してはできるだけ早いハンドル操作やブレーキ/アクセル等、遅い物体に対しては急なハンドル操作やブレーキ/アクセル等は行わず、余裕を持った操作ができる。従って、遅い物体の場合には、乗員に衝撃を与えたり、他の移動体を驚かせて別の事故になりかねない急激な運転操作をしたりすることなく、運転手に適切な危険回避操作をさせることができる。
【0015】
(10)好ましくは、本発明に係る警報装置では、制御手段は、さらに他の装置から入力する車速信号を加味して危険度を判断するようにするとよい。
本態様の警報装置によれば、GPSや移動体の速度計からのスピードパルスからの車速信号を加味して判断することで、相対速度だけでなく絶対速度も検出でき、危険度の精度を高めることができる。
【0016】
(11)好ましくは、本発明に係る警報装置では、制御手段は、さらに接近中の物体が人であるか否かを判断し、報知手段は、接近する物体が人である場合には、移動体の外部にも警報を出力するようにするとよい。
本態様の警報装置によれば、外部の接近する人に対しても警報を発して危険度を低減させることができ、外部の接近物が人でない場合には、不要な警報を外部に出力しないで、電力の無駄を無くし、危険度の無い周囲の人等を驚かせることはない。
【発明の効果】
【0017】
本発明により、車両の横方向や斜め前の死角を含む車両の周囲からの他の移動体の接近を、その接近方向と共に検出して、接近方向を含めて報知する警報装置を提供することができる。
【図面の簡単な説明】
【0018】
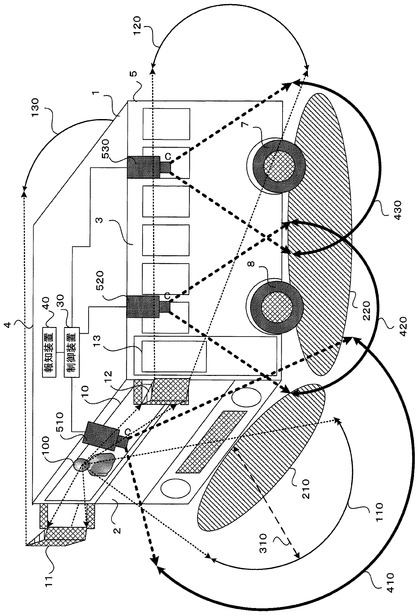
【図1】本発明の第1実施形態の警報装置が車両に設置された場合の外観を示す斜視図である。
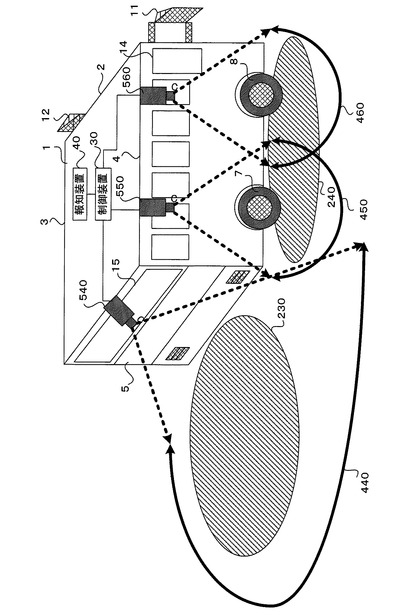
【図2】図1の警報装置が車両に設置された場合の図1とは反対側の外観を示す斜視図である。
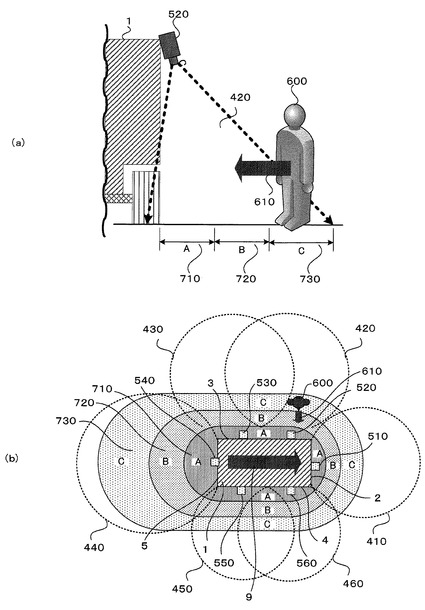
【図3】図1の警報装置に設定される区分領域を示す図である。
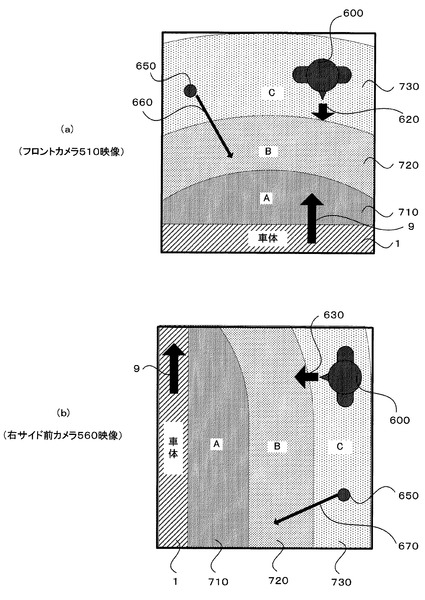
【図4】図1の警報装置の複数の検出手段である複数のカメラ画像のうち、(a)フロントカメラのディスプレイ装置表示画像と、(b)右サイド前側からのディスプレイ装置表示画像である。
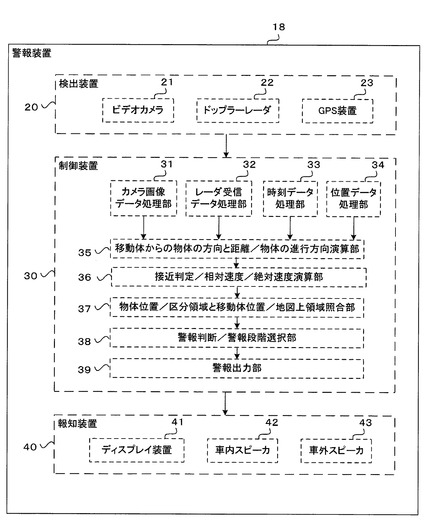
【図5】図1の警報装置の概要の構成を示すブロック図である。
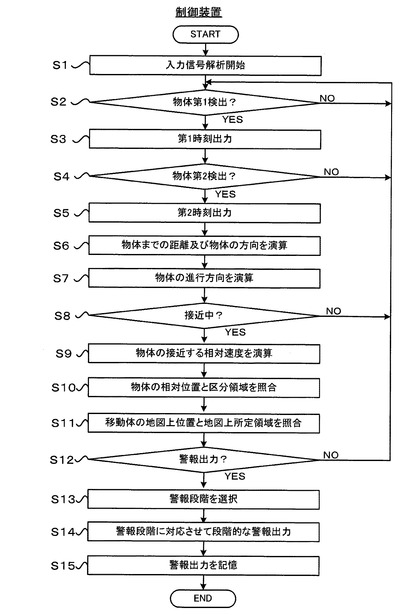
【図6】図1の警報装置の制御手段の概要の動作を示すフローチャートである。
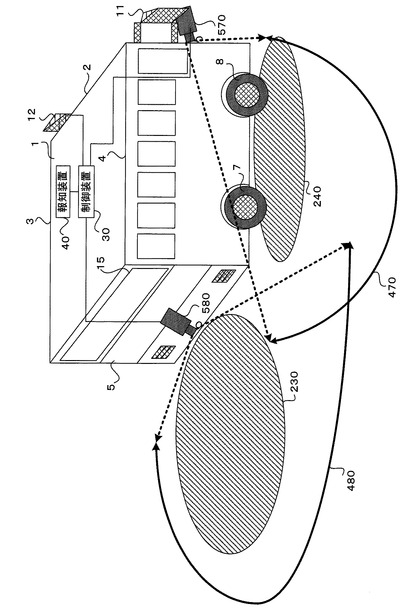
【図7】本発明の第2実施形態の警報装置が車両に設置された場合の外観を示す斜視図である。
【図8】図7の警報装置が車両に設置された場合の上面図である。
【発明を実施するための形態】
【0019】
(第1実施形態)
本発明の第1実施形態に係る警報装置18は、図1〜図6に示したように、移動体1に搭載される。移動体1は、運転手100により運転される乗り物であり、道路を移動するバスである。運転手100は、移動体1中の前方に設けられた運転席に位置し、フロントガラス10を通して移動体1の進行方向の前方を注視すると共に、移動体1の運転席の左右両側面に設けられたサイドガラス13、14と、当該サイドガラス13、14の前側に設けられるバックミラー11、12等により、側面や後方に注意を払いながら運転する。また、乗用車等では、バックミラー11、12に加えて、後方を映すルームミラー(不図示)も使用される。
【0020】
次に、移動体1の運転手の運転時の目視動作と死角領域の関係について簡単に説明する。運転手100は、フロントガラス10を通して前方を注視するが、運転席には計器等が設置されるダッシュボードやコンソールボックス等があり、フロントガラス10は前面2の一部にしか設置されないので、運転席の前面2のフロントガラス10の下側には死角領域210ができる。つまり、死角領域210は、移動体1(運転席)の前面2の下側から、運転席で視認可能となる位置110までの距離310の間の領域である。
【0021】
同様に、運転手100は、移動体1の左右両側面3、4のサイドガラス13、14を通して左右両側面に対しても注意を払う。しかし、移動体1の左右両側面3、4にはボディがあり、サイドガラス13、14は左右両側面3、4の一部にしか設置されないので、運転席100の両側面3、4のサイドガラス13、14の下側には死角領域220、240ができる。また、この左右両側面3、4の後方を映すために、バックミラー11、12等が使用され、これにより、左右下側の一部の死角を減らすことができる。
【0022】
しかし、バックミラー11、12は後続車両等を認知するために左右後方120、130を映すことが主な用途であり、左右後方120、130が最も見えやすいように設置されることから、両側面3、4の下部側はあまり映すことができない。つまり、死角領域220、240は、移動体1の運転席の左右両側面3、4の下側から、サイドガラス13、14及びバックミラー11、12で視認可能となる位置までの間の領域である。
【0023】
同様に、運転手100は、移動体1の後面5のリヤガラス15を通し、又、バックミラー11、12及び備えられている場合にはルームミラー等を用いて後面5に対しても注意を払う。しかし、移動体1の後面5にもボディがあり、リヤガラス15は後面5の一部にしか設置されないので、後面5のリヤガラス15の下側には死角領域230ができる。つまり、死角領域230は、移動体1の後面5の下側から、リヤガラス15及びバックミラー11、12等で視認可能となる位置までの間の領域である。
【0024】
また、この後面5を映すために、乗用車等ではルームミラーやバックドアミラー等が使用され、これにより、死角領域230の一部を減らすことができる。しかし、ルームミラーやバックドアミラー等は運転手100から遠く、視野角も狭くなるので後面5の全ての死角領域230を映すことができない。
【0025】
本実施形態に係る警報装置18は、撮像画像から物体600、650を検出し、接近しているか、速度等を判断して、危険であれば警報する装置であり、本実施形態では、検出データを検出時期と対応させて記憶し、記憶と新規入力とから判断と警報を行っている。また、本実施形態に係る警報装置18は、図5に示すように検出装置20、制御装置30、報知装置40を有し、検出装置20と制御装置30と報知装置40は電気的に配線等で接続される。また、検出装置20で検出された信号は、制御装置30に入力するとそこで処理及び判断が実施され、判断結果により制御装置30から報知装置40に警報が出力される。なお、本実施形態の図3及び図4では、物体600が人であり、物体650がボール又は鳥等の飛来物であり、矢印9が移動体1の進行方向と速度を示すベクトル、矢印610、620が物体600(人)の進行方向と速度を示すベクトル、矢印660、670が物体650(ボール又は鳥等)の進行方向と速度を示すベクトルとする。
【0026】
より具体的には警報装置18は、図1、2等に示したように、移動体1の外装側に、周囲の物体600、650を検出して検出信号を出力する複数の検出装置20として、ビデオカメラ510、520、530、540、550、560(以下、ビデオカメラ510等と記載)を搭載している。また、警報装置18は、各ビデオカメラ510等と電気的に接続され、複数の検出装置20による各検出信号の検出時期に基づき、移動体1に対する物体600、650の距離、検出された方向、及び、移動体1における物体600、650のある方向の危険度のうち少なくとも何れか2つを判断する制御装置30と、物体600、650が接近中である場合に、移動体1の物体600、650がある方向の危険度を報知する報知装置40とを有している。
【0027】
本実施形態に係る検出装置20は、光学的に物体600、650等を撮像する複数のビデオカメラを含み、例えば、図1及び図2における510等であり、図5のビデオカメラ21である。検出装置20をビデオカメラ510等として制御装置30経由でディスプレイ装置41と接続することで、物体600、650の画像をディスプレイ装置41に表示することができる。本実施形態では、検出信号としてビデオカメラ510等で撮像された画像情報を用いる。本実施形態に係る警報装置18では、移動体1の前方または少なくとも前方を含む周囲を、ビデオカメラ510等で撮像する。
【0028】
ビデオカメラ510等は、検出装置20に含まれ、例えば、CCDやCMOSセンサなどを用いて構成され、画像フレーム毎の信号を出力し、移動体1の外周における比較的上側に取り付けられる。ビデオカメラ510等は、各死角領域210、220、230、240を含む領域を撮影し、領域内の画像の縮尺レベルと基準となる移動体の一部等の既知寸法に対する物体600、650との大きさ比較により物体600、650の大きさを検出することができるように、画像に移動体1の一部等の基準画像を映すことができる位置に取り付けられる。また、ビデオカメラ510等は、撮像した1フレーム毎の画像データを、例えば、30フレーム/毎秒等の場合であれば33.3msとなる周期で制御装置30に出力する。
【0029】
警報装置18には、少なくともビデオカメラ510等で撮像した画像データと、その画像データから検出された検出データを記憶させる記憶装置(不図示)が搭載される。記憶装置としては、警報装置18内の内部記憶素子でもよいが、メモリーカード等の外部記憶接続部に接続された着脱可能な外部記憶媒体、又は、通信装置を介して通信可能な外部記憶媒体であってもよい。
【0030】
ビデオカメラ510は、移動体1の前面2におけるフロントガラス10の上部に設けられ、運転席の前面2の死角領域210を含む前面撮影領域410を撮影する。ビデオカメラ520は、移動体1の左側の側面3におけるサイドガラスの上部に設けられ、側面3の死角領域220のうち、主に前輪8の周辺を含む左側面前側撮影領域420を撮影する。ビデオカメラ530も、移動体1の左側の側面3におけるサイドガラスの上部に設けられ、側面3の死角領域220のうち、主に後輪7の周辺を含む左側面後側撮影領域430を撮影する。
【0031】
ビデオカメラ540は、移動体1の後面5におけるリヤガラス15の上部に設けられ、後面5の死角領域230を含む後面撮影領域440を撮影する。ビデオカメラ550は、移動体1の右側の側面4におけるサイドガラスの上部に設けられ、側面4の死角領域240のうち、主に後輪7の周辺を含む右側面後側撮影領域450を撮影する。ビデオカメラ560も、移動体1の右側の側面4におけるサイドガラスの上部に設けられ、側面4の死角領域240のうち、主に前輪8の周辺を含む右側面前側撮影領域460を撮影する。
【0032】
前面撮影領域410、左側面前側撮影領域420、左側面後側撮影領域430、後面撮影領域440、右側面後側撮影領域450、及び、右側面前側撮影領域460は、移動体1からの距離に応じて、各々さらに複数の区分領域に予め分割される。図3(a)に示したように移動体1のビデオカメラ520に近づいてくる物体600が人である場合、移動体1からの距離が遠いC区分領域730よりも、距離が近いA区分領域710の方が危険度が高い。B区分領域720は、危険度がA区分領域710とC区分領域720の中間となる領域である。
【0033】
例えば、人がC区分領域730に居る時には危険度が低いので軽い警報でよいが、人がA区分領域730に近づいてきた時には危険度が高いので激しい警報が必要になる。また、人の進行方向のベクトル610が移動体1に近づく方向ではない場合よりも、近づく方向の場合には危険度が高くなり、近づく場合でも速度が遅い場合よりも、速い場合の方が危険度が高くなる。
【0034】
また、移動体1の周囲の各区分領域は、移動体1からの距離(領域幅)を前後左右の各方向で一様にする必要は無く、各方向毎に運転者が視認できる範囲が少なく死角領域が広い場合には区分領域は広くすることができる。例えば、図3(b)に示したように、移動体1の前方よりも後方の各区分領域については、運転者が視認できる範囲が少なく死角領域が広いので、移動体1からの距離を大きくして、区分領域(及び検出範囲)を広げるようにしてもよい。また、側面についても、運転手がいる右側よりも左側の各区分領域を広げて検出範囲を広げるようにしてもよい。各区分領域710、720、730は、予め検出装置20の検出信号に基づき、後述する制御装置30により設定して登録しておく。
【0035】
図5に示したドップラーレーダー22は、検出装置20に含まれ、例えばマイクロ波を物体600、650等に送信して、物体600、650等で反射したマイクロ波信号を検出し、マイクロ波の速度、周波数及び送信から受信までの時間等を用いて物体の検出すると共に物体の速度を検出する検出装置である。ドップラーレーダー22を用いた場合の動作については、第2実施形態で後述する。
【0036】
GPS装置23は、検出装置20に含まれ、GPS信号からその時の位置情報と時刻情報を、例えば、1秒間に1回等の周期で検出して、検出データを出力することができる。従って、例えば、ビデオカメラにより撮影領域を撮影した画像データから物体600、650が検出された場合に、その撮像された画像データに関連付けて時刻及び位置の情報を付加することができる。
【0037】
制御装置30は、入力する各種データに対して様々な処理を実施する演算素子であり、例えば、汎用のマイクロプロセッサ等を用いてプログラムにより全ての処理を実施する。
また、制御装置30用として、検出装置20で検出された画像データ出力、上記した演算素子の演算時に必要となる各種データや動作プログラム、演算結果、検出データ、位置データ、領域データ等の各種データ、及び、演算の作業領域等の記憶用としての記憶装置(不図示)を有する。この記憶装置は、上記した警報装置18の画像データ及び検出データを記憶するものと共通のものを用いている。
【0038】
記憶装置に領域データや位置データ、演算結果や検出結果を記憶することで、制御装置30は、その後、記憶されたデータ等を危険度の判定に用い、運転者に対してより精度の高い危険報知を出力することができ、警報装置18の利便性を高める事ができる。また、記憶装置は、記憶容量が有限であることから、例えば、GPS装置23等から位置データと地図データ、登録された地域データ及び施設データ、及び、本実施形態の各演算装置等を用いて、検出結果の記憶のonとoffを切り替え、危険度が少ない場合には記憶しないようにすることで、記憶装置の容量を低減させることができ、また、使用時の記憶容量不足を軽減することができる。
【0039】
登録する地図データ及び施設データとしては、例えば、(イ)学校/幼稚園/保育園/公園の周辺等の児童や生徒の人口密度が高くなる領域、(ロ)老人ホームや介護施設周辺等の老人の人口密度が高くなる領域、(ハ)駅周辺等の通勤/通学の人口が高くなる領域、(ニ)商店街/ショッピングセンタ−/ショッピングモール等の買い物客の人口密度が高くなる領域等である。このような領域を用いることで、危険報知の精度を高めることができる。
【0040】
制御装置30は、検出装置20のビデオカメラ510等で検出した物体600、650の画像をディスプレイ装置41に表示する。ディスプレイ装置41は、例えば、ダッシュボード上等の運転手の周囲に設置され、運転手が視認可能な平面型表示装置である。従って、運転手100は物体600、650が何かを直接に撮像画像から確認することができる。
【0041】
一方、制御装置30は、検出信号として撮像された画像情報を用いて、物体600、650の外形を画像認識する。さらに制御装置30は、撮像時期(例えば撮像時刻)に差のある複数フレームの表示画像から各々物体600、650を検出し、その位置の相違から移動方向と速度(ベクトル)を検出する。また制御装置30は、画像に移動体1の一部等の基準画像を映しておくことで、寸法が不明の物体600、650と、寸法が既知の移動体1の一部との大きさを比較し、物体600、650の大きさを検出する。
【0042】
また、制御装置30は、上記した物体600、650についての外形の画像認識結果、移動体1と比較した大きさ、移動方向、速度(ベクトル)等から、接近中の物体600、650が人であるか否かを判断する。そして、接近する物体600、650が人である場合には、制御装置30は、報知装置40により警報を発生させる際に、運転手用の車内スピーカ42だけでなく、移動体1外部の車外スピーカ43にも警報を出力するようにする。制御装置30をこのようにすれば、外部の接近する人に対しても警報を発して危険度を低減させることができる。また、外部の接近物が人でない場合には、不要な警報を外部に出力しないで、電力の無駄を無くし、危険度の無い領域にいる周囲の人や動物を驚かせることはない。
【0043】
カメラ画像データ処理部31は、各ビデオカメラ510、520、530、540、550及び560からの画像データに対して、例えば制御装置30内の内部処理や記憶に適した画像データに加工処理を施し、次の物体の方向、距離、進行方向等の演算ブロックに出力する。
【0044】
レーダー受信データ処理部32は、ドップラーレーダー22からの受信データに対して、所定の処理を施して、制御装置30内の内部処理や記憶に適した画像データに加工処理を施し、次の演算ブロックに出力する。ドップラーレーダー22を用いた場合の動作については、第2実施形態で後述する。
【0045】
時刻データ処理部33は、GPS装置23からの時刻データを制御装置30内の内部処理や記憶に適したデータとし、画像データ等の他の入力データや演算データと対応させて時刻データを関係付ける。これにより、ビデオカメラ510等で検出した物体600、650の各画像には時刻データが関係付けられる。従って、制御装置30は、各画像の時系列を認識し、30フレーム/毎秒等の各画像フレーム毎の画像の変化から、物体600、650の進行方向や速度を演算し、移動体1の方へ物体600、650が接近中か否か、について判断する。
【0046】
位置データ処理部34は、GPS装置23からの位置データを制御装置30内の内部処理や記憶に適したデータとし、画像データ等の他の入力データや演算データと対応させて時刻データを関係付ける。
【0047】
移動体からの物体の方向と距離/物体の進行方向演算部35は、カメラ画像データ処理部31からの画像データ、時刻データ処理部33からの時刻データ、位置データ処理部34からの位置データに基づいて、移動体1からの物体600、650の方向と距離を演算し、さらに物体600、650の進行方向を演算する。
【0048】
接近判定/相対速度/絶対速度演算部36は、移動体からの物体の方向と距離/物体の進行方向演算部35からの物体600、650の方向と距離、物体600、650の進行方向に基づいて、物体600、650が移動体1に接近しているか否か、物体600、650と移動体1との相対速度、物体600、650と移動体1の絶対速度を演算する。なお、移動体1の絶対速度については、移動体1自体の速度センサ等のデータを流用したり、速度の精度を向上させるために用いてもよい。
【0049】
物体位置/区分領域と移動体位置/地図上領域照合部37は、カメラ画像データ処理部31からの画像データ、時刻データ処理部33からの時刻データ、位置データ処理部34からの位置データに基づいて、物体600、650と移動体1の現在位置、物体600、650が現在存在する区分領域、移動体1が現在地図上のどの領域にいるかを照合する。また、物体位置/区分領域と移動体位置/地図上領域照合部37は、さらに接近判定/相対速度/絶対速度演算部36の演算結果(接近判定/相対速度/絶対速度)に基づいて、衝突の可能性を判定し、衝突する場合の残り時間を演算する。
【0050】
警報判断/警報段階選択部38は、(A)上記した物体600、650が移動体1に接近しているか否か、(B)物体600、650と移動体1との相対速度、(C)物体600、650と移動体1の絶対速度、(D)物体600、650と移動体1の現在位置、(E)物体600、650が現在存在する区分領域、(F)移動体1が現在地図上のどの領域にいるか、(G)衝突の可能性、(H)衝突する場合の残り時間の各情報が入力される。警報判断/警報段階選択部38は、例えば、図6のフローチャートに示した方法を用いて(A)〜(H)の各情報から、物体600、650による衝突の危険度を判断し、警報を出力するか否かと、警報出力する場合の警報段階を現状の危険度に応じて選択する。
【0051】
警報出力部39は、警報を出力する場合に、選択された警報段階に応じて、後述するディスプレイ装置41に表示させるための表示用画像フレームとそれに対応する表示用情報からなる画像出力信号と、運転席用の車内スピーカ42から出力させる車内用音響出力信号と、移動体1が車外スピーカ43を有する場合の車外スピーカ43から出力させる車外用音響出力信号を生成して出力する。
【0052】
ディスプレイ装置41は、LCD(液晶表示装置)、EL(エレクトロルミネッセンス)表示素子等を利用した平面型表示装置であり、移動体1の運転手が目視可能な位置に取り付けられ、入力する画像信号に基づいた画像を表示する。
【0053】
車内スピーカ42は、移動体1の運転手の近傍に設けられ、警報出力部39からの車内用音響出力信号が入力されると、運転手に対して合成音声や警報音を出力する。
【0054】
車外スピーカ43は、外部報知装置であり、例えば、移動体1の外周部の各死角領域210、220、230、240の近傍、又は、ビデオカメラ510等の近傍に設けられ、警報出力部39からの車外用音響出力信号が入力されると、図3(a)、(b)に物体600として示される移動体1外部の歩行者等に対して合成音声や警報音を出力する。また、制御装置30が、移動体1の外部の人に危険度が有ると判断した場合には、外部の人(物体600)に対して外部報知装置を用いて、危険が迫っていることを報知する。
【0055】
次に、本実施形態の警報装置18の動作について、図6を用いて、図1〜図5を参照しつつ説明する。
本実施形態の警報装置18では、制御装置30を用いて、各ビデオカメラ510等からの画像データ中の移動体1の位置を登録すると共に、移動体1の周囲に予め移動体1からの距離に応じて、近い方からA区分領域710、B区分領域720、最も遠いC区分領域730を設定して登録しておく。各区分領域710、720、730の分け方は、事例研究や事故の記憶等から危険な距離(例えばこれ以上接近したら事故になる危険を有すると判断できる移動体1からの距離)をその危険度に応じて2段階等に分けて設定する。
【0056】
各区分領域の設定方法は、キーボードやタッチパネル等の入力装置を利用して設定することもできるが、例えば、警報装置18が設定モード中に実際の各区分領域710、720、730の境界の複数位置に実際に人を立たせて、その人の立つ複数位置を各ポイントとして検出し、各ポイントを接続することで設定してもよい。人による領域設定では、人が手を上げる等の動作や、人が手を上や横に上げた形状、あるいは、同じ所に立ち止まる時間等を検出して設定してもよい。
【0057】
また、制御装置30は、移動体1の車両の大きさ、並びに、検出装置20の移動体1への設置高及び取付角度を利用して区分領域710、720、730の初期値を登録するようにするとよい。また、本実施形態の警報装置18の制御装置30によれば、上記した各区分領域の説明に記載した方法に従えば、移動体1の運転者が視認できる範囲に合わせて、移動体1毎に異なる区分領域710、720、730を登録できるので、危険度の判断を移動体1毎に適正化することができる
【0058】
また、警報装置18が地図データを有している場合には、その地図データ中に、例えば入力装置により、危険度に応じて警報内容を変更する地図上所定領域を予め設定しておく。この地図上所定領域についても、キーボードやタッチパネル等の入力装置を利用して設定することもできる。
【0059】
本実施形態の警報装置18の制御装置30は、まず、各ビデオカメラ510等毎に入力信号の解析を開始し(S1)、物体600又は650の第1回目の検出があったか否かを判断する(S2)。第1回目の検出が無い場合(S2:NO)には、制御装置30は、再度ステップS2を繰り返して第1回目の検出の有無を判断する。第1回目の検出が有った場合(S2:YES)には、制御装置30は、その第1回目の検出が有った時刻をGPS信号等から得て、第1回目の検出位置とその検出時刻を対応させて不図示の記憶装置に格納する。
【0060】
次に、制御装置30は、物体600又は650の第2回目の検出があったか否かを判断する(S4)。第2回目の検出が無い場合(S4:NO)には、制御装置30は、ステップS2に戻って第1回目の検出の有無を判断する。第2回目の検出が有った場合(S4:YES)には、制御装置30は、その第2回目の検出が有った時刻をGPS信号等から得て、第2回目の検出位置とその検出時刻を対応させて不図示の記憶装置に格納する。
【0061】
制御装置30は、記憶された第1回目の検出位置及び検出時間、第2回目の検出位置及び検出時間に基づいて、第1回目と第2回目の各々について、移動体1から物体600又は650までの距離及び移動体1から見た場合の物体600又は650のある方向を演算する(S6)。さらに、その第1回目の物体600又は650の距離及び方向と、第2回目の物体600又は650の距離及び方向とから、物体600又は650の進行方向を演算する(S7)。
【0062】
制御装置30は、物体600又は650の進行方向を移動体1の位置とから、物体600又は650が移動体1に接近中であるか否かを判断する(S8)。接近中で無い場合(S8:NO)には、制御装置30は、ステップS2に戻って第1回目の検出の有無を判断する。接近中であった場合(S8:YES)には、制御装置30は、第1回目の検出位置及び検出時間、第2回目の検出位置及び検出時間等に基づいて物体600又は650が移動体1に接近する相対速度を演算する(S9)。
【0063】
制御装置30は、登録された画像データ中の移動体1の位置、第1回目の検出位置、第2回目の検出位置、各区分領域710、720、730の登録内容とから、物体600又は650の相対位置と各区分領域710、720、730とを照合し、物体600又は650の絶対速度も演算する(S10)。以上のように本実施形態の制御装置30によれば、物体600又は650の移動体1からの距離と、危険度が異なるように予め区分された区分領域710、720、730毎に異なる報知をすることで、運転手100に適切な危険回避操作をさせることができ、物体600又は650の進行方向及び接近中であることの演算により、物体600、650の接近判断及び危険度を報知する精度を高める事ができる。
【0064】
また、警報装置18では、例えば車両の車速センサや、GPS信号に基づく車速センサ等の他の装置から入力する車速信号を加味することで移動体1の速度検出の精度を上げて、移動体1と物体600、650との相対速度及び絶対速度を演算し、危険度を判断してもよい。これにより警報装置18では、GPSや移動体1の速度計からのスピードパルスからの車速信号を加味して判断することで、相対速度だけでなく移動体1と物体600、650の絶対速度も検出でき、危険度の精度を高めることができる。
【0065】
また、制御装置30は、上記したように物体600が人であることを判別できるので、移動体の外部の人(歩行者等)に危険が迫っていると判断した場合、車外スピーカ43等の外部報知装置を用いて、外部の人(物体600)に対して、移動体1と接近し、衝突する危険が迫っていることを報知し、退避させることができる。物体600が犬や猫、鳥等の動物である場合にも、同様に報知して退避させることができる。従って運転手100は、それらの人や動物との衝突を回避するための操作を軽減することができる。一般的に危険回避操作は、急ハンドルや急ブレーキ等の他の事故につながる危険がある操作であるので、上記の外部報知により、衝突の危険性を軽減することでだけでなく、二次的な事故の危険性も軽減させることができる。
【0066】
また、制御装置30は、GPS等による移動体1の地図上(地球上)位置を、予め設定された地図上所定領域とを照合する(S11)。その際に検出装置20であるGPS等は、移動体1の地上の位置を検出する。
【0067】
制御装置30は、移動体1の地図上位置が、予め複数に分けられた地上の地図上所定領域内に位置するか否かを判断し、その結果により警報を出力するかしないかを判断する(S12)。移動体1が地図上所定領域外で、警報を出力しない場合(S12:NO)には、制御装置30は、ステップS2に戻って第1回目の検出の有無を判断する。移動体1が地図上所定領域内で、警報を出力する場合(S12:YES)には、制御装置30は、物体600又は650の相対速度、絶対速度、相対位置、絶対位置、移動体1の地図上位置等から、警報段階に対応させて、警報の種類と音量と段階的に選択し、警報信号を出力する。そして報知装置40が、相対速度に応じて段階的に警報を出力する。
【0068】
また、制御装置30は、制御装置30による判断及び選択等の結果に応じて、例えば、移動体1が異なる地上の領域にある場合には、報知装置40から異なる警報を出力させる(S14)。そして、制御装置30は、警報出力を記憶装置に格納し処理を終了する(S15)。
【0069】
例えば、本実施形態の警報装置18は、制御装置30で移動体1の位置を検出して、例えば、上記した(イ)学校、幼稚園/保育園、(ロ)老人ホーム等のような子供や老人の多い施設の地図上の周辺領域では、報知する周囲領域を拡大したり、報知内容を異ならせることで、事故の確率を減らすことができる。
【0070】
このように本実施形態の警報装置18によれば、運転手100は、移動体1に対して物体600、650がどの程度の速度で接近する危険が発生しているかわかる。すると運転手100は、早い物体600、650に対してはできるだけ早いハンドル操作やブレーキ/アクセル等、遅い物体600、650に対しては急なハンドル操作やブレーキ/アクセル等は行わず、余裕を持った操作で危険を回避することができる。また、運転手100は、接近する物体600、650が遅い場合には、乗員に衝撃を与えたり、他の移動体1を驚かせて別の事故になりかねない急激な運転操作をすることなく、適切な危険回避操作をすることができる
【0071】
また、制御装置30は、ディスプレイ装置への表示について、危険度が無い場合には、通常モードの表示、例えば現在位置の地図表示等とし、危険度が有ると判断した場合に、ディスプレイ装置に物体600、650及び危険が迫っていることを通知する画像を表示し、危険度が無くなったと判断した場合に、ディスプレイ装置の物体600、650及び危険が迫っていることの表示を停止する。これにより本実施形態の警報装置18によれば、危険度がある場合のみモニタに物体600、650及び危険が迫っていることを表示させるので、運転者が注意散漫にならず、有効に運転者に危険内容を報知することができる。
【0072】
また、制御装置30は、音声についても、物体600、650が検出され、危険が迫っていることから、上記したディスプレイ装置に画像を表示するのと同じタイミングで、危険度があることを運転手に対して報知装置である車内スピーカ42から報知する。このように音声で報知することにより、物体600、650が検出され危険が迫っていることや、物体600等がモニタに表示されたことを確実に運転者に気付かせることができ、有効に運転者に危険内容を報知することができる。
【0073】
また、制御装置30は、入力する各種データに対して様々な処理を実施する演算素子であり、例えば、汎用のマイクロプロセッサやCPU等を用いてプログラムにより全ての処理を実施させることとしたが、情報量の多い画像データについては専用の画像処理用演算素子(グラフィックコントローラ)を追加してもよい。また、記憶装置は、上記した警報装置18の画像データ及び検出データを記憶するものと共通のものとしたが、それぞれ専用の記憶装置であっても良く、また、内蔵型であっても、着脱自在な外部記憶媒体であってもよい。
【0074】
以上のように本実施形態の警報装置18によれば、予め検出装置20の検出信号に基づき、移動体1の周囲に危険度に応じた1つ以上の区分領域710、720、730を登録しておき、物体600、650が、移動体1からの距離により予め複数に分けられた各区分領域710、720、730の何れの領域内に位置するかの位置関係を判断する。そして報知装置40は、制御装置30による、区分領域710、720、730と物体600又は650の位置関係の判断結果に応じて異なる警報を出力する。
【0075】
また、本実施形態の警報装置18によれば、移動体1に対する物体600、650の方向と距離と検出時刻から、物体600、650がどの方向から接近中であるかわかる。従って、物体600、650が接近する危険に対して、運転手100は、ハンドル操作やブレーキ/アクセル等を、物体600、650との衝突を回避する方向に適切に危険回避操作させることができる。
【0076】
(第2実施形態)
上記した第1実施形態では、検出装置20がビデオカメラ510等であったが、ビデオカメラの場合には、夜間等には撮像に必要な照度等が不足して画像が不明瞭になり、物体600等が検出できなくなる場合がある。また、取り付け位置から被写体までの距離が短い場合等に用いられる広角レンズのビデオカメラで広範囲を撮像すると個々の物体が小さく表示されるが、画面中の物体が小さくなると画像認識が困難になる場合がある。第2実施形態では、第1実施形態の課題を改善するために、例えばマイクロ波等の所定周波数の電磁波又は超音波等を利用したドップラーレーダーを用いる。
【0077】
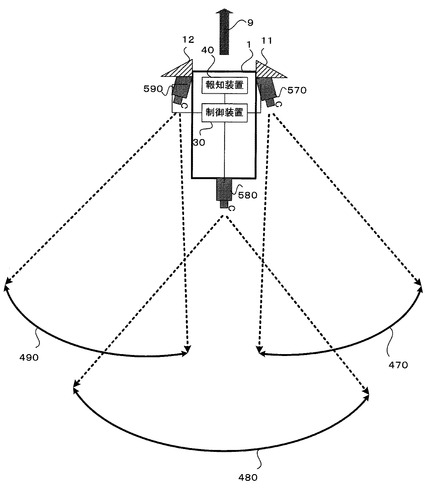
本実施形態に係る警報装置18は、図7、図8に示すように検出装置20としてのドップラーレーダー570〜590、制御装置30、報知装置40を有し、検出装置20と制御装置30と報知装置40は電気的に配線等で接続される。また、検出装置20で検出された信号は、制御装置30に入力するとそこで処理及び判断が実施され、判断結果により制御装置30から報知装置40に警報が出力される。
【0078】
図7、図8に示した本実施形態の警報装置18では、検出装置20は、電磁波を送受信して物体600、650を検出するドップラーレーダー570〜590である。ドップラーレーダー570は、移動体1の右側の側面4におけるサイドミラー11の下部にその後方の右側面検出領域470を監視して物体を検出するように設けられる。右側面検出領域470は、側面4の死角領域240を含む領域である。
【0079】
ドップラーレーダー580は、移動体1の左側の側面3におけるサイドミラー12の下部にその後方の右側面検出領域490を監視して物体を検出するように設けられる。右側面検出領域490は、側面3の死角領域220を含む領域である。
【0080】
ドップラーレーダー590は、移動体1の後面5におけるリヤバンパー内にその後方の後面検出領域480を監視して物体を検出するように設けられる。後面検出領域480は、後面5の死角領域230を含む領域である。
【0081】
本実施形態の警報装置18では、側面の検出装置20を第1実施形態のビデオカメラ520等からドップラーレーダー570にすることで、制御装置30は、検出信号として受信した電磁波の信号を用いることになり、夜間や暗い場所でも物体600、650を検出できると共に、物体が小さかったり、遠くであっても検出できる。また、ドップラーレーダー570は、第1実施形態のビデオカメラ520等よりも検出範囲が広いため、取り付け位置や取り付け角度の自由度を高くできる。
【0082】
従来の車両用ドップラーレーダーは、移動体の前方等の進行方向における障害物の検出や、移動体の後方から追い上げてくる車両等の検出ができるように、移動体の周囲に設置されていた。しかし、従来のドップラーレーダーは移動体の死角領域にある物体を検出するような角度で設置されていない。
【0083】
制御部30における各死角領域からの検出信号の処理方法、報知装置40における報知方法等は、第1実施形態と同様である。それに加えて検出装置20をドップラーレーダー570〜590とした場合には、以下の各ケース毎に判別して接近する物体を検出して、個別のケース毎に異なる警告(報知)を発生する。
(1)左サイドミラー12下のドップラーレーダー590のみで左後方から接近して追尾する別車両(物)を検出した場合の、左後方からの接近物の存在とその距離及び接近する相対速度についての警告。
(2)右サイドミラー下のドップラーレーダー570のみで右後方から接近して追尾する別車両(物)を検出した場合の、右後方からの接近物の存在とその距離及び接近する相対速度についての警告。
(3)後方のドップラーレーダー580のみで後方から接近して追尾する別車両(物)を検出した場合の、後方からの接近物の存在とその距離及び接近する相対速度についての警告。
(4)左サイドミラー下のドップラーレーダー590と、後方のドップラーレーダー580で左後方から接近して追尾する別車両(物)を検出した場合の、左後方((1)の場合よりもミラーで検出しにくいさらに後方寄りの死角領域)からの接近物の存在とその距離及び接近する相対速度についての警告。
(5)右サイドミラー下のドップラーレーダー570と、後方のドップラーレーダー580で右後方から接近して追尾する別車両(物)を検出した場合の、右後方((2)の場合よりもミラーで検出しにくいさらに後方寄りの死角領域)からの接近物の存在とその距離及び接近する相対速度についての警告。
(6)上記(1)〜(5)の接近物が検出できなくなった場合の、接近物の離脱の報知。
【0084】
上記の各警告や報知が可能になることで本実施形態では、自車の進行方向に対して、左右後方、特に死角領域から接近するバイク、自転車、歩行者等の物体を検出して、巻き込みや接触による事故を防止することができる。また、例えば、渋滞中に渋滞車両間をすり抜けてくるバイク、夜間のバイク、自転車、歩行者等の第1実施形態のビデオカメラでは検出が難しい対象物に対してより素早く検出することができる。また、死角から後方に接近する車両も素早く検出できることから、その接近車両が煽り行為をする前に避難でき、例え、後方から追突されることになっても、事前に知ることで心構えができ、衝撃に対する防御姿勢をとることや頸椎周辺の筋肉に緊張感を持たせて、むち打ち症等の疾病を軽減させることができる。
【0085】
このように、検出装置20を第1実施形態のビデオカメラ510等に代えてドップラーレーダーとすることで、安価に構成でき、夜間の物体検出及び微小な物体の検出について改善することができ、検出範囲が広くなるため、上記のようなさらなる効果をえることができる。また、ドップラーレーダーには、周波数帯が重複する装置の信号による誤報を防止する信号処理回路を設けてもよい。また、ビデオカメラとドップラーレーダーを併用することで、上記した第1実施形態のビデオカメラのみの場合と、ドップラーレーダーのみの場合の個別のメリットに加えて、物体600、650までの距離の精度を高めることができる。
【0086】
以上、本発明を実施の形態を用いて説明したが、本発明は、上記実施の形態に記載の範囲には限定されるものではなく、移動体における運転手の死角領域を検出する装置、特に、従来のカメラ又はドップラーレーダーのように検出対象が他の移動体のために前方空間又は後方空間から検出するのではなく、上方から下方の死角領域の地面に向けて物体を検出する検出装置を有し、死角領域の物体を検出する検出装置を有していれば本発明の効果を得ることが可能である。また、上述した実施形態では、移動体1は、バスの例で説明したが、トラック、乗用車等の自動車、鉄道を移動する列車、海上を移動する船舶としてもよい。
【符号の説明】
【0087】
1 移動体、
2 (移動体の)前面、
3 (移動体の)左側の側面、
4 (移動体の)右側の側面、
5 (移動体の)後面、
7 (移動体の)後輪、
8 (移動体の)前輪、
9 (移動体の進行方向と速度を示すベクトルの)矢印、
10 (移動体の)フロントガラス、
11 (移動体の右側)バックミラー、
12 (移動体の左側)バックミラー、
13 (移動体の左側)サイドガラス、
14 (移動体の右側)サイドガラス、
15 (移動体の)リヤガラス、
18 警報装置、
20 検出装置、
30 制御装置、
31 カメラ画像データ処理部、
32 レーダー受信データ処理部、
33 時刻データ処理部、
34 位置データ処理部、
35 動体からの物体の方向と距離/物体の進行方向演算部、
36 接近判定/相対速度/絶対速度演算部、
37 物体位置/区分領域と移動体位置/地図上領域照合部、
38 警報判断/警報段階選択部、
39 警報出力部、
40 報知装置、
41 ディスプレイ装置、
42 車内スピーカ、
43 車外スピーカ、
100 運転手、
110 視認可能となる位置、
120 (移動体左側の)後方、
130 (移動体右側の)後方、
210 (移動体前側の)死角領域、
220 (移動体左側の)死角領域、
230 (移動体後側の)死角領域、
240 (移動体右側の)死角領域、
310 (移動体前側の視認可能位置までの)距離、
410 (移動体の)前面撮影領域、
420 (移動体の)左側面前側撮影領域、
430 (移動体の)左側面後側撮影領域、
440 (移動体の)後面撮影領域、
450 (移動体の)右側面後側撮影領域、
460 (移動体の)右側面前側撮影領域、
470 (移動体の)右側面検出領域、
480 (移動体の)左側面検出領域、
490 (移動体の)後面検出領域、
510 (移動体の前面)ビデオカメラ、
520 (移動体の左側面前側)ビデオカメラ、
530 (移動体の左側面後側)ビデオカメラ、
540 (移動体の後面)ビデオカメラ、
550 (移動体の右側面後側)ビデオカメラ、
560 (移動体の右側面前側)ビデオカメラ、
570 (移動体の右側面)ドップラーレーダー、
580 (移動体の左側面)ドップラーレーダー、
590 (移動体の後面)ドップラーレーダー、
610、620 (人:物体600の進行方向と速度を示すベクトルの)矢印、
600 物体(人)、
650 物体(飛来物:鳥、ボール等)、
660、670 (人:物体600の進行方向と速度を示すベクトルの)矢印、
710 A区分領域、
720 B区分領域、
730 C区分領域。
【技術分野】
【0001】
本発明は、移動体の周囲の危険を運転手に警告する警報装置に関する。
【背景技術】
【0002】
サイドミラーやルームミラーの死角を補償するために、両サイドミラーの代わりの左右側面後方撮像カメラと、ルームミラーの代わりの後方撮像カメラとを備えた車両用周囲状況表示装置が知られている(例えば、特許文献1参照)。特許文献1の装置では、車両の周囲状況をカメラ画像から検出し、検出された車両の周囲状況を画面上に画像表示し、車両に対して相対移動する移動体を検出する。そして、そのように周囲の車両を検出できることにより運転手の死角範囲を小さくできる。また、検出された移動体の情報に基づいて、移動体の画面上での位置を計算し、画面中の移動体の画像領域を強調表示することで、間接視界中の危険な要因を即座に認識することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−223487号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、例えば、車両の運転手は、運転中は画面を常時注視することが難しいので、特許文献1の車両用周囲状況表示装置のように画面中の移動体の画像領域を強調表示しても、運転手がその画面中に瞬間的に表示される移動体に気付くとは限らない。特に、右折や左折等の曲がり角等や車庫入れ等ではハンドル操作中には画面の表示を見ることは非常に困難であり、移動体の接近を知ることが難しい。また、例えば、ハンドル操作中に画面中の移動体に気付いたとしても、表示された画像内容から瞬時に、どの方向から移動体が接近中かを判断することは難しい。また、自車の進行方向に直角に近い横方向やフロント側のAピラー等による斜め前の死角から接近する他の移動体、車両のサイドミラー下側や、車両の前方下側の障害物の検出については示されていない。
【0005】
本発明は、車両の横方向や斜め前の死角を含む車両の周囲からの他の移動体の接近を、その接近方向と共に検出して、接近方向を含めて報知する警報装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)上記課題を解決するために、本発明に係る警報装置は、移動体の周囲の物体を検出した場合に検出信号を出力する複数の検出手段と、前記複数の検出手段による各検出信号の検出時期に基づき、移動体に対する物体の距離、検出された方向、及び、移動体における物体のある方向の危険度のうち少なくとも何れか2つを判断する制御手段と、前記判断結果に基づき当該移動体における前記物体がある方向の危険度を報知する報知手段とを含む。
本態様の警報装置によれば、移動体に対する物体の方向と距離と検出時期から、物体がどの方向から接近中であるかわかるので、運転手は、危険に対してハンドル操作やブレーキ/アクセル等を、物体との衝突を回避する方向に適切に危険回避操作させることができる。
【0007】
(2)好ましくは、制御手段は、前記物体の進行方向、前記移動体へ前記物体が接近中か否か、についても判断するようにするとよい。
本態様の警報装置によれば、物体の接近判断及び危険度を報知する精度を高める事ができる。
【0008】
(3)好ましくは、本発明に係る警報装置では、検出手段は、光学的に物体を撮像するカメラであり、制御手段は、検出信号として撮像された画像情報を用いるようにするとよい。
本態様の警報装置によれば、検出手段をカメラにすることで、物体の外形を画像認識でき、画像の撮像時期に差(例えば撮像時刻に差)のある画像の変化から物体を検出することで移動方向(ベクトル)を正確に検出できる。なお、制御手段は、検出手段の検出信号の状態を、報知手段で報知させる制御をするとよい。(3)のようにすれば、検出手段であるカメラからの物体の画像をディスプレイ装置に表示する構成とすることもできる。このようにすれば、運転手は物体が何かを撮像画像から確認できる。また、画像に移動体の一部等の基準画像を映すことで物体との大きさ比較ができ、物体の大きさを検出することができる。
【0009】
(4)好ましくは、本発明に係る警報装置では、検出手段は、電磁波を送受信して物体を検出するドップラーレーダーであり、制御手段は、検出信号として受信した電磁波の信号を用いるようにするとよい。
本態様の警報装置によれば、検出手段をドップラーレーダーにすることで、夜間や暗い場所でも物体を検出でき、小さい物体、遠くの物体であっても検出でき、カメラよりも取り付け位置や取り付け角度の自由度を高くできる。
【0010】
(5)好ましくは、本発明に係る警報装置では、制御手段は、物体が、移動体からの距離により予め複数に分けられた各区分領域の何れの領域内に位置するかを判断し、報知手段は、当該判断結果に応じて異なる警報を出力するようにするとよい。
本態様の警報装置によれば、移動体からの距離と危険度が異なるように予め区分された区分領域毎に異なる報知をすることで、運転手に適切な危険回避操作をさせることができる。
【0011】
(6)好ましくは、本発明に係る警報装置では、制御手段は、検出手段の検出信号に基づき、移動体の周囲に危険度に応じた1つ以上の領域を登録し、領域と物体の位置関係を判断し、報知手段は、領域と物体の位置関係に応じて異なる警報を出力するようにするとよい。
本態様の警報装置によれば、運転手(利用者)自身が領域を登録でき、警報が登録した領域との関係で異なる警報が出力される。従って、運転手は物体の位置と領域との位置関係が容易にわかり、危険の緊急度も容易に知ることができる。
【0012】
(7)好ましくは、本発明に係る警報装置では、前記制御手段は、前記移動体の車両の大きさ、並びに、前記検出手段の前記移動体への設置高及び取付角度を利用して前記領域の初期値を登録するようにするとよい。
本態様の警報装置によれば、移動体毎に異なる領域を容易に登録できるので、危険度の判断を移動体毎に適正化することができる。
【0013】
(8)好ましくは、本発明に係る警報装置では、検出手段は、移動体の地上の位置を検出し、制御手段は、移動体が予め複数に分けられた地上の領域内に位置するかを判断し、報知手段は、移動体が異なる区分領域にある場合に異なる警報を出力するようにするとよい。
本態様の警報装置によれば、移動体の位置を検出して、子供や老人の多い施設の周辺領域では、報知する周囲区分領域を拡大したり、報知内容を異ならせたりすることで、事故の確率を減らすことができる。
【0014】
(9)好ましくは、本発明に係る警報装置では、制御手段は、さらに、物体の接近する相対速度を求め、記報知手段は、相対速度に応じて段階的警報を出力するようにするとよい。
本態様の警報装置によれば、運転手は、移動体に対して物体がどの程度の速度で接近する危険があるかわかるので、速い物体に対してはできるだけ早いハンドル操作やブレーキ/アクセル等、遅い物体に対しては急なハンドル操作やブレーキ/アクセル等は行わず、余裕を持った操作ができる。従って、遅い物体の場合には、乗員に衝撃を与えたり、他の移動体を驚かせて別の事故になりかねない急激な運転操作をしたりすることなく、運転手に適切な危険回避操作をさせることができる。
【0015】
(10)好ましくは、本発明に係る警報装置では、制御手段は、さらに他の装置から入力する車速信号を加味して危険度を判断するようにするとよい。
本態様の警報装置によれば、GPSや移動体の速度計からのスピードパルスからの車速信号を加味して判断することで、相対速度だけでなく絶対速度も検出でき、危険度の精度を高めることができる。
【0016】
(11)好ましくは、本発明に係る警報装置では、制御手段は、さらに接近中の物体が人であるか否かを判断し、報知手段は、接近する物体が人である場合には、移動体の外部にも警報を出力するようにするとよい。
本態様の警報装置によれば、外部の接近する人に対しても警報を発して危険度を低減させることができ、外部の接近物が人でない場合には、不要な警報を外部に出力しないで、電力の無駄を無くし、危険度の無い周囲の人等を驚かせることはない。
【発明の効果】
【0017】
本発明により、車両の横方向や斜め前の死角を含む車両の周囲からの他の移動体の接近を、その接近方向と共に検出して、接近方向を含めて報知する警報装置を提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態の警報装置が車両に設置された場合の外観を示す斜視図である。
【図2】図1の警報装置が車両に設置された場合の図1とは反対側の外観を示す斜視図である。
【図3】図1の警報装置に設定される区分領域を示す図である。
【図4】図1の警報装置の複数の検出手段である複数のカメラ画像のうち、(a)フロントカメラのディスプレイ装置表示画像と、(b)右サイド前側からのディスプレイ装置表示画像である。
【図5】図1の警報装置の概要の構成を示すブロック図である。
【図6】図1の警報装置の制御手段の概要の動作を示すフローチャートである。
【図7】本発明の第2実施形態の警報装置が車両に設置された場合の外観を示す斜視図である。
【図8】図7の警報装置が車両に設置された場合の上面図である。
【発明を実施するための形態】
【0019】
(第1実施形態)
本発明の第1実施形態に係る警報装置18は、図1〜図6に示したように、移動体1に搭載される。移動体1は、運転手100により運転される乗り物であり、道路を移動するバスである。運転手100は、移動体1中の前方に設けられた運転席に位置し、フロントガラス10を通して移動体1の進行方向の前方を注視すると共に、移動体1の運転席の左右両側面に設けられたサイドガラス13、14と、当該サイドガラス13、14の前側に設けられるバックミラー11、12等により、側面や後方に注意を払いながら運転する。また、乗用車等では、バックミラー11、12に加えて、後方を映すルームミラー(不図示)も使用される。
【0020】
次に、移動体1の運転手の運転時の目視動作と死角領域の関係について簡単に説明する。運転手100は、フロントガラス10を通して前方を注視するが、運転席には計器等が設置されるダッシュボードやコンソールボックス等があり、フロントガラス10は前面2の一部にしか設置されないので、運転席の前面2のフロントガラス10の下側には死角領域210ができる。つまり、死角領域210は、移動体1(運転席)の前面2の下側から、運転席で視認可能となる位置110までの距離310の間の領域である。
【0021】
同様に、運転手100は、移動体1の左右両側面3、4のサイドガラス13、14を通して左右両側面に対しても注意を払う。しかし、移動体1の左右両側面3、4にはボディがあり、サイドガラス13、14は左右両側面3、4の一部にしか設置されないので、運転席100の両側面3、4のサイドガラス13、14の下側には死角領域220、240ができる。また、この左右両側面3、4の後方を映すために、バックミラー11、12等が使用され、これにより、左右下側の一部の死角を減らすことができる。
【0022】
しかし、バックミラー11、12は後続車両等を認知するために左右後方120、130を映すことが主な用途であり、左右後方120、130が最も見えやすいように設置されることから、両側面3、4の下部側はあまり映すことができない。つまり、死角領域220、240は、移動体1の運転席の左右両側面3、4の下側から、サイドガラス13、14及びバックミラー11、12で視認可能となる位置までの間の領域である。
【0023】
同様に、運転手100は、移動体1の後面5のリヤガラス15を通し、又、バックミラー11、12及び備えられている場合にはルームミラー等を用いて後面5に対しても注意を払う。しかし、移動体1の後面5にもボディがあり、リヤガラス15は後面5の一部にしか設置されないので、後面5のリヤガラス15の下側には死角領域230ができる。つまり、死角領域230は、移動体1の後面5の下側から、リヤガラス15及びバックミラー11、12等で視認可能となる位置までの間の領域である。
【0024】
また、この後面5を映すために、乗用車等ではルームミラーやバックドアミラー等が使用され、これにより、死角領域230の一部を減らすことができる。しかし、ルームミラーやバックドアミラー等は運転手100から遠く、視野角も狭くなるので後面5の全ての死角領域230を映すことができない。
【0025】
本実施形態に係る警報装置18は、撮像画像から物体600、650を検出し、接近しているか、速度等を判断して、危険であれば警報する装置であり、本実施形態では、検出データを検出時期と対応させて記憶し、記憶と新規入力とから判断と警報を行っている。また、本実施形態に係る警報装置18は、図5に示すように検出装置20、制御装置30、報知装置40を有し、検出装置20と制御装置30と報知装置40は電気的に配線等で接続される。また、検出装置20で検出された信号は、制御装置30に入力するとそこで処理及び判断が実施され、判断結果により制御装置30から報知装置40に警報が出力される。なお、本実施形態の図3及び図4では、物体600が人であり、物体650がボール又は鳥等の飛来物であり、矢印9が移動体1の進行方向と速度を示すベクトル、矢印610、620が物体600(人)の進行方向と速度を示すベクトル、矢印660、670が物体650(ボール又は鳥等)の進行方向と速度を示すベクトルとする。
【0026】
より具体的には警報装置18は、図1、2等に示したように、移動体1の外装側に、周囲の物体600、650を検出して検出信号を出力する複数の検出装置20として、ビデオカメラ510、520、530、540、550、560(以下、ビデオカメラ510等と記載)を搭載している。また、警報装置18は、各ビデオカメラ510等と電気的に接続され、複数の検出装置20による各検出信号の検出時期に基づき、移動体1に対する物体600、650の距離、検出された方向、及び、移動体1における物体600、650のある方向の危険度のうち少なくとも何れか2つを判断する制御装置30と、物体600、650が接近中である場合に、移動体1の物体600、650がある方向の危険度を報知する報知装置40とを有している。
【0027】
本実施形態に係る検出装置20は、光学的に物体600、650等を撮像する複数のビデオカメラを含み、例えば、図1及び図2における510等であり、図5のビデオカメラ21である。検出装置20をビデオカメラ510等として制御装置30経由でディスプレイ装置41と接続することで、物体600、650の画像をディスプレイ装置41に表示することができる。本実施形態では、検出信号としてビデオカメラ510等で撮像された画像情報を用いる。本実施形態に係る警報装置18では、移動体1の前方または少なくとも前方を含む周囲を、ビデオカメラ510等で撮像する。
【0028】
ビデオカメラ510等は、検出装置20に含まれ、例えば、CCDやCMOSセンサなどを用いて構成され、画像フレーム毎の信号を出力し、移動体1の外周における比較的上側に取り付けられる。ビデオカメラ510等は、各死角領域210、220、230、240を含む領域を撮影し、領域内の画像の縮尺レベルと基準となる移動体の一部等の既知寸法に対する物体600、650との大きさ比較により物体600、650の大きさを検出することができるように、画像に移動体1の一部等の基準画像を映すことができる位置に取り付けられる。また、ビデオカメラ510等は、撮像した1フレーム毎の画像データを、例えば、30フレーム/毎秒等の場合であれば33.3msとなる周期で制御装置30に出力する。
【0029】
警報装置18には、少なくともビデオカメラ510等で撮像した画像データと、その画像データから検出された検出データを記憶させる記憶装置(不図示)が搭載される。記憶装置としては、警報装置18内の内部記憶素子でもよいが、メモリーカード等の外部記憶接続部に接続された着脱可能な外部記憶媒体、又は、通信装置を介して通信可能な外部記憶媒体であってもよい。
【0030】
ビデオカメラ510は、移動体1の前面2におけるフロントガラス10の上部に設けられ、運転席の前面2の死角領域210を含む前面撮影領域410を撮影する。ビデオカメラ520は、移動体1の左側の側面3におけるサイドガラスの上部に設けられ、側面3の死角領域220のうち、主に前輪8の周辺を含む左側面前側撮影領域420を撮影する。ビデオカメラ530も、移動体1の左側の側面3におけるサイドガラスの上部に設けられ、側面3の死角領域220のうち、主に後輪7の周辺を含む左側面後側撮影領域430を撮影する。
【0031】
ビデオカメラ540は、移動体1の後面5におけるリヤガラス15の上部に設けられ、後面5の死角領域230を含む後面撮影領域440を撮影する。ビデオカメラ550は、移動体1の右側の側面4におけるサイドガラスの上部に設けられ、側面4の死角領域240のうち、主に後輪7の周辺を含む右側面後側撮影領域450を撮影する。ビデオカメラ560も、移動体1の右側の側面4におけるサイドガラスの上部に設けられ、側面4の死角領域240のうち、主に前輪8の周辺を含む右側面前側撮影領域460を撮影する。
【0032】
前面撮影領域410、左側面前側撮影領域420、左側面後側撮影領域430、後面撮影領域440、右側面後側撮影領域450、及び、右側面前側撮影領域460は、移動体1からの距離に応じて、各々さらに複数の区分領域に予め分割される。図3(a)に示したように移動体1のビデオカメラ520に近づいてくる物体600が人である場合、移動体1からの距離が遠いC区分領域730よりも、距離が近いA区分領域710の方が危険度が高い。B区分領域720は、危険度がA区分領域710とC区分領域720の中間となる領域である。
【0033】
例えば、人がC区分領域730に居る時には危険度が低いので軽い警報でよいが、人がA区分領域730に近づいてきた時には危険度が高いので激しい警報が必要になる。また、人の進行方向のベクトル610が移動体1に近づく方向ではない場合よりも、近づく方向の場合には危険度が高くなり、近づく場合でも速度が遅い場合よりも、速い場合の方が危険度が高くなる。
【0034】
また、移動体1の周囲の各区分領域は、移動体1からの距離(領域幅)を前後左右の各方向で一様にする必要は無く、各方向毎に運転者が視認できる範囲が少なく死角領域が広い場合には区分領域は広くすることができる。例えば、図3(b)に示したように、移動体1の前方よりも後方の各区分領域については、運転者が視認できる範囲が少なく死角領域が広いので、移動体1からの距離を大きくして、区分領域(及び検出範囲)を広げるようにしてもよい。また、側面についても、運転手がいる右側よりも左側の各区分領域を広げて検出範囲を広げるようにしてもよい。各区分領域710、720、730は、予め検出装置20の検出信号に基づき、後述する制御装置30により設定して登録しておく。
【0035】
図5に示したドップラーレーダー22は、検出装置20に含まれ、例えばマイクロ波を物体600、650等に送信して、物体600、650等で反射したマイクロ波信号を検出し、マイクロ波の速度、周波数及び送信から受信までの時間等を用いて物体の検出すると共に物体の速度を検出する検出装置である。ドップラーレーダー22を用いた場合の動作については、第2実施形態で後述する。
【0036】
GPS装置23は、検出装置20に含まれ、GPS信号からその時の位置情報と時刻情報を、例えば、1秒間に1回等の周期で検出して、検出データを出力することができる。従って、例えば、ビデオカメラにより撮影領域を撮影した画像データから物体600、650が検出された場合に、その撮像された画像データに関連付けて時刻及び位置の情報を付加することができる。
【0037】
制御装置30は、入力する各種データに対して様々な処理を実施する演算素子であり、例えば、汎用のマイクロプロセッサ等を用いてプログラムにより全ての処理を実施する。
また、制御装置30用として、検出装置20で検出された画像データ出力、上記した演算素子の演算時に必要となる各種データや動作プログラム、演算結果、検出データ、位置データ、領域データ等の各種データ、及び、演算の作業領域等の記憶用としての記憶装置(不図示)を有する。この記憶装置は、上記した警報装置18の画像データ及び検出データを記憶するものと共通のものを用いている。
【0038】
記憶装置に領域データや位置データ、演算結果や検出結果を記憶することで、制御装置30は、その後、記憶されたデータ等を危険度の判定に用い、運転者に対してより精度の高い危険報知を出力することができ、警報装置18の利便性を高める事ができる。また、記憶装置は、記憶容量が有限であることから、例えば、GPS装置23等から位置データと地図データ、登録された地域データ及び施設データ、及び、本実施形態の各演算装置等を用いて、検出結果の記憶のonとoffを切り替え、危険度が少ない場合には記憶しないようにすることで、記憶装置の容量を低減させることができ、また、使用時の記憶容量不足を軽減することができる。
【0039】
登録する地図データ及び施設データとしては、例えば、(イ)学校/幼稚園/保育園/公園の周辺等の児童や生徒の人口密度が高くなる領域、(ロ)老人ホームや介護施設周辺等の老人の人口密度が高くなる領域、(ハ)駅周辺等の通勤/通学の人口が高くなる領域、(ニ)商店街/ショッピングセンタ−/ショッピングモール等の買い物客の人口密度が高くなる領域等である。このような領域を用いることで、危険報知の精度を高めることができる。
【0040】
制御装置30は、検出装置20のビデオカメラ510等で検出した物体600、650の画像をディスプレイ装置41に表示する。ディスプレイ装置41は、例えば、ダッシュボード上等の運転手の周囲に設置され、運転手が視認可能な平面型表示装置である。従って、運転手100は物体600、650が何かを直接に撮像画像から確認することができる。
【0041】
一方、制御装置30は、検出信号として撮像された画像情報を用いて、物体600、650の外形を画像認識する。さらに制御装置30は、撮像時期(例えば撮像時刻)に差のある複数フレームの表示画像から各々物体600、650を検出し、その位置の相違から移動方向と速度(ベクトル)を検出する。また制御装置30は、画像に移動体1の一部等の基準画像を映しておくことで、寸法が不明の物体600、650と、寸法が既知の移動体1の一部との大きさを比較し、物体600、650の大きさを検出する。
【0042】
また、制御装置30は、上記した物体600、650についての外形の画像認識結果、移動体1と比較した大きさ、移動方向、速度(ベクトル)等から、接近中の物体600、650が人であるか否かを判断する。そして、接近する物体600、650が人である場合には、制御装置30は、報知装置40により警報を発生させる際に、運転手用の車内スピーカ42だけでなく、移動体1外部の車外スピーカ43にも警報を出力するようにする。制御装置30をこのようにすれば、外部の接近する人に対しても警報を発して危険度を低減させることができる。また、外部の接近物が人でない場合には、不要な警報を外部に出力しないで、電力の無駄を無くし、危険度の無い領域にいる周囲の人や動物を驚かせることはない。
【0043】
カメラ画像データ処理部31は、各ビデオカメラ510、520、530、540、550及び560からの画像データに対して、例えば制御装置30内の内部処理や記憶に適した画像データに加工処理を施し、次の物体の方向、距離、進行方向等の演算ブロックに出力する。
【0044】
レーダー受信データ処理部32は、ドップラーレーダー22からの受信データに対して、所定の処理を施して、制御装置30内の内部処理や記憶に適した画像データに加工処理を施し、次の演算ブロックに出力する。ドップラーレーダー22を用いた場合の動作については、第2実施形態で後述する。
【0045】
時刻データ処理部33は、GPS装置23からの時刻データを制御装置30内の内部処理や記憶に適したデータとし、画像データ等の他の入力データや演算データと対応させて時刻データを関係付ける。これにより、ビデオカメラ510等で検出した物体600、650の各画像には時刻データが関係付けられる。従って、制御装置30は、各画像の時系列を認識し、30フレーム/毎秒等の各画像フレーム毎の画像の変化から、物体600、650の進行方向や速度を演算し、移動体1の方へ物体600、650が接近中か否か、について判断する。
【0046】
位置データ処理部34は、GPS装置23からの位置データを制御装置30内の内部処理や記憶に適したデータとし、画像データ等の他の入力データや演算データと対応させて時刻データを関係付ける。
【0047】
移動体からの物体の方向と距離/物体の進行方向演算部35は、カメラ画像データ処理部31からの画像データ、時刻データ処理部33からの時刻データ、位置データ処理部34からの位置データに基づいて、移動体1からの物体600、650の方向と距離を演算し、さらに物体600、650の進行方向を演算する。
【0048】
接近判定/相対速度/絶対速度演算部36は、移動体からの物体の方向と距離/物体の進行方向演算部35からの物体600、650の方向と距離、物体600、650の進行方向に基づいて、物体600、650が移動体1に接近しているか否か、物体600、650と移動体1との相対速度、物体600、650と移動体1の絶対速度を演算する。なお、移動体1の絶対速度については、移動体1自体の速度センサ等のデータを流用したり、速度の精度を向上させるために用いてもよい。
【0049】
物体位置/区分領域と移動体位置/地図上領域照合部37は、カメラ画像データ処理部31からの画像データ、時刻データ処理部33からの時刻データ、位置データ処理部34からの位置データに基づいて、物体600、650と移動体1の現在位置、物体600、650が現在存在する区分領域、移動体1が現在地図上のどの領域にいるかを照合する。また、物体位置/区分領域と移動体位置/地図上領域照合部37は、さらに接近判定/相対速度/絶対速度演算部36の演算結果(接近判定/相対速度/絶対速度)に基づいて、衝突の可能性を判定し、衝突する場合の残り時間を演算する。
【0050】
警報判断/警報段階選択部38は、(A)上記した物体600、650が移動体1に接近しているか否か、(B)物体600、650と移動体1との相対速度、(C)物体600、650と移動体1の絶対速度、(D)物体600、650と移動体1の現在位置、(E)物体600、650が現在存在する区分領域、(F)移動体1が現在地図上のどの領域にいるか、(G)衝突の可能性、(H)衝突する場合の残り時間の各情報が入力される。警報判断/警報段階選択部38は、例えば、図6のフローチャートに示した方法を用いて(A)〜(H)の各情報から、物体600、650による衝突の危険度を判断し、警報を出力するか否かと、警報出力する場合の警報段階を現状の危険度に応じて選択する。
【0051】
警報出力部39は、警報を出力する場合に、選択された警報段階に応じて、後述するディスプレイ装置41に表示させるための表示用画像フレームとそれに対応する表示用情報からなる画像出力信号と、運転席用の車内スピーカ42から出力させる車内用音響出力信号と、移動体1が車外スピーカ43を有する場合の車外スピーカ43から出力させる車外用音響出力信号を生成して出力する。
【0052】
ディスプレイ装置41は、LCD(液晶表示装置)、EL(エレクトロルミネッセンス)表示素子等を利用した平面型表示装置であり、移動体1の運転手が目視可能な位置に取り付けられ、入力する画像信号に基づいた画像を表示する。
【0053】
車内スピーカ42は、移動体1の運転手の近傍に設けられ、警報出力部39からの車内用音響出力信号が入力されると、運転手に対して合成音声や警報音を出力する。
【0054】
車外スピーカ43は、外部報知装置であり、例えば、移動体1の外周部の各死角領域210、220、230、240の近傍、又は、ビデオカメラ510等の近傍に設けられ、警報出力部39からの車外用音響出力信号が入力されると、図3(a)、(b)に物体600として示される移動体1外部の歩行者等に対して合成音声や警報音を出力する。また、制御装置30が、移動体1の外部の人に危険度が有ると判断した場合には、外部の人(物体600)に対して外部報知装置を用いて、危険が迫っていることを報知する。
【0055】
次に、本実施形態の警報装置18の動作について、図6を用いて、図1〜図5を参照しつつ説明する。
本実施形態の警報装置18では、制御装置30を用いて、各ビデオカメラ510等からの画像データ中の移動体1の位置を登録すると共に、移動体1の周囲に予め移動体1からの距離に応じて、近い方からA区分領域710、B区分領域720、最も遠いC区分領域730を設定して登録しておく。各区分領域710、720、730の分け方は、事例研究や事故の記憶等から危険な距離(例えばこれ以上接近したら事故になる危険を有すると判断できる移動体1からの距離)をその危険度に応じて2段階等に分けて設定する。
【0056】
各区分領域の設定方法は、キーボードやタッチパネル等の入力装置を利用して設定することもできるが、例えば、警報装置18が設定モード中に実際の各区分領域710、720、730の境界の複数位置に実際に人を立たせて、その人の立つ複数位置を各ポイントとして検出し、各ポイントを接続することで設定してもよい。人による領域設定では、人が手を上げる等の動作や、人が手を上や横に上げた形状、あるいは、同じ所に立ち止まる時間等を検出して設定してもよい。
【0057】
また、制御装置30は、移動体1の車両の大きさ、並びに、検出装置20の移動体1への設置高及び取付角度を利用して区分領域710、720、730の初期値を登録するようにするとよい。また、本実施形態の警報装置18の制御装置30によれば、上記した各区分領域の説明に記載した方法に従えば、移動体1の運転者が視認できる範囲に合わせて、移動体1毎に異なる区分領域710、720、730を登録できるので、危険度の判断を移動体1毎に適正化することができる
【0058】
また、警報装置18が地図データを有している場合には、その地図データ中に、例えば入力装置により、危険度に応じて警報内容を変更する地図上所定領域を予め設定しておく。この地図上所定領域についても、キーボードやタッチパネル等の入力装置を利用して設定することもできる。
【0059】
本実施形態の警報装置18の制御装置30は、まず、各ビデオカメラ510等毎に入力信号の解析を開始し(S1)、物体600又は650の第1回目の検出があったか否かを判断する(S2)。第1回目の検出が無い場合(S2:NO)には、制御装置30は、再度ステップS2を繰り返して第1回目の検出の有無を判断する。第1回目の検出が有った場合(S2:YES)には、制御装置30は、その第1回目の検出が有った時刻をGPS信号等から得て、第1回目の検出位置とその検出時刻を対応させて不図示の記憶装置に格納する。
【0060】
次に、制御装置30は、物体600又は650の第2回目の検出があったか否かを判断する(S4)。第2回目の検出が無い場合(S4:NO)には、制御装置30は、ステップS2に戻って第1回目の検出の有無を判断する。第2回目の検出が有った場合(S4:YES)には、制御装置30は、その第2回目の検出が有った時刻をGPS信号等から得て、第2回目の検出位置とその検出時刻を対応させて不図示の記憶装置に格納する。
【0061】
制御装置30は、記憶された第1回目の検出位置及び検出時間、第2回目の検出位置及び検出時間に基づいて、第1回目と第2回目の各々について、移動体1から物体600又は650までの距離及び移動体1から見た場合の物体600又は650のある方向を演算する(S6)。さらに、その第1回目の物体600又は650の距離及び方向と、第2回目の物体600又は650の距離及び方向とから、物体600又は650の進行方向を演算する(S7)。
【0062】
制御装置30は、物体600又は650の進行方向を移動体1の位置とから、物体600又は650が移動体1に接近中であるか否かを判断する(S8)。接近中で無い場合(S8:NO)には、制御装置30は、ステップS2に戻って第1回目の検出の有無を判断する。接近中であった場合(S8:YES)には、制御装置30は、第1回目の検出位置及び検出時間、第2回目の検出位置及び検出時間等に基づいて物体600又は650が移動体1に接近する相対速度を演算する(S9)。
【0063】
制御装置30は、登録された画像データ中の移動体1の位置、第1回目の検出位置、第2回目の検出位置、各区分領域710、720、730の登録内容とから、物体600又は650の相対位置と各区分領域710、720、730とを照合し、物体600又は650の絶対速度も演算する(S10)。以上のように本実施形態の制御装置30によれば、物体600又は650の移動体1からの距離と、危険度が異なるように予め区分された区分領域710、720、730毎に異なる報知をすることで、運転手100に適切な危険回避操作をさせることができ、物体600又は650の進行方向及び接近中であることの演算により、物体600、650の接近判断及び危険度を報知する精度を高める事ができる。
【0064】
また、警報装置18では、例えば車両の車速センサや、GPS信号に基づく車速センサ等の他の装置から入力する車速信号を加味することで移動体1の速度検出の精度を上げて、移動体1と物体600、650との相対速度及び絶対速度を演算し、危険度を判断してもよい。これにより警報装置18では、GPSや移動体1の速度計からのスピードパルスからの車速信号を加味して判断することで、相対速度だけでなく移動体1と物体600、650の絶対速度も検出でき、危険度の精度を高めることができる。
【0065】
また、制御装置30は、上記したように物体600が人であることを判別できるので、移動体の外部の人(歩行者等)に危険が迫っていると判断した場合、車外スピーカ43等の外部報知装置を用いて、外部の人(物体600)に対して、移動体1と接近し、衝突する危険が迫っていることを報知し、退避させることができる。物体600が犬や猫、鳥等の動物である場合にも、同様に報知して退避させることができる。従って運転手100は、それらの人や動物との衝突を回避するための操作を軽減することができる。一般的に危険回避操作は、急ハンドルや急ブレーキ等の他の事故につながる危険がある操作であるので、上記の外部報知により、衝突の危険性を軽減することでだけでなく、二次的な事故の危険性も軽減させることができる。
【0066】
また、制御装置30は、GPS等による移動体1の地図上(地球上)位置を、予め設定された地図上所定領域とを照合する(S11)。その際に検出装置20であるGPS等は、移動体1の地上の位置を検出する。
【0067】
制御装置30は、移動体1の地図上位置が、予め複数に分けられた地上の地図上所定領域内に位置するか否かを判断し、その結果により警報を出力するかしないかを判断する(S12)。移動体1が地図上所定領域外で、警報を出力しない場合(S12:NO)には、制御装置30は、ステップS2に戻って第1回目の検出の有無を判断する。移動体1が地図上所定領域内で、警報を出力する場合(S12:YES)には、制御装置30は、物体600又は650の相対速度、絶対速度、相対位置、絶対位置、移動体1の地図上位置等から、警報段階に対応させて、警報の種類と音量と段階的に選択し、警報信号を出力する。そして報知装置40が、相対速度に応じて段階的に警報を出力する。
【0068】
また、制御装置30は、制御装置30による判断及び選択等の結果に応じて、例えば、移動体1が異なる地上の領域にある場合には、報知装置40から異なる警報を出力させる(S14)。そして、制御装置30は、警報出力を記憶装置に格納し処理を終了する(S15)。
【0069】
例えば、本実施形態の警報装置18は、制御装置30で移動体1の位置を検出して、例えば、上記した(イ)学校、幼稚園/保育園、(ロ)老人ホーム等のような子供や老人の多い施設の地図上の周辺領域では、報知する周囲領域を拡大したり、報知内容を異ならせることで、事故の確率を減らすことができる。
【0070】
このように本実施形態の警報装置18によれば、運転手100は、移動体1に対して物体600、650がどの程度の速度で接近する危険が発生しているかわかる。すると運転手100は、早い物体600、650に対してはできるだけ早いハンドル操作やブレーキ/アクセル等、遅い物体600、650に対しては急なハンドル操作やブレーキ/アクセル等は行わず、余裕を持った操作で危険を回避することができる。また、運転手100は、接近する物体600、650が遅い場合には、乗員に衝撃を与えたり、他の移動体1を驚かせて別の事故になりかねない急激な運転操作をすることなく、適切な危険回避操作をすることができる
【0071】
また、制御装置30は、ディスプレイ装置への表示について、危険度が無い場合には、通常モードの表示、例えば現在位置の地図表示等とし、危険度が有ると判断した場合に、ディスプレイ装置に物体600、650及び危険が迫っていることを通知する画像を表示し、危険度が無くなったと判断した場合に、ディスプレイ装置の物体600、650及び危険が迫っていることの表示を停止する。これにより本実施形態の警報装置18によれば、危険度がある場合のみモニタに物体600、650及び危険が迫っていることを表示させるので、運転者が注意散漫にならず、有効に運転者に危険内容を報知することができる。
【0072】
また、制御装置30は、音声についても、物体600、650が検出され、危険が迫っていることから、上記したディスプレイ装置に画像を表示するのと同じタイミングで、危険度があることを運転手に対して報知装置である車内スピーカ42から報知する。このように音声で報知することにより、物体600、650が検出され危険が迫っていることや、物体600等がモニタに表示されたことを確実に運転者に気付かせることができ、有効に運転者に危険内容を報知することができる。
【0073】
また、制御装置30は、入力する各種データに対して様々な処理を実施する演算素子であり、例えば、汎用のマイクロプロセッサやCPU等を用いてプログラムにより全ての処理を実施させることとしたが、情報量の多い画像データについては専用の画像処理用演算素子(グラフィックコントローラ)を追加してもよい。また、記憶装置は、上記した警報装置18の画像データ及び検出データを記憶するものと共通のものとしたが、それぞれ専用の記憶装置であっても良く、また、内蔵型であっても、着脱自在な外部記憶媒体であってもよい。
【0074】
以上のように本実施形態の警報装置18によれば、予め検出装置20の検出信号に基づき、移動体1の周囲に危険度に応じた1つ以上の区分領域710、720、730を登録しておき、物体600、650が、移動体1からの距離により予め複数に分けられた各区分領域710、720、730の何れの領域内に位置するかの位置関係を判断する。そして報知装置40は、制御装置30による、区分領域710、720、730と物体600又は650の位置関係の判断結果に応じて異なる警報を出力する。
【0075】
また、本実施形態の警報装置18によれば、移動体1に対する物体600、650の方向と距離と検出時刻から、物体600、650がどの方向から接近中であるかわかる。従って、物体600、650が接近する危険に対して、運転手100は、ハンドル操作やブレーキ/アクセル等を、物体600、650との衝突を回避する方向に適切に危険回避操作させることができる。
【0076】
(第2実施形態)
上記した第1実施形態では、検出装置20がビデオカメラ510等であったが、ビデオカメラの場合には、夜間等には撮像に必要な照度等が不足して画像が不明瞭になり、物体600等が検出できなくなる場合がある。また、取り付け位置から被写体までの距離が短い場合等に用いられる広角レンズのビデオカメラで広範囲を撮像すると個々の物体が小さく表示されるが、画面中の物体が小さくなると画像認識が困難になる場合がある。第2実施形態では、第1実施形態の課題を改善するために、例えばマイクロ波等の所定周波数の電磁波又は超音波等を利用したドップラーレーダーを用いる。
【0077】
本実施形態に係る警報装置18は、図7、図8に示すように検出装置20としてのドップラーレーダー570〜590、制御装置30、報知装置40を有し、検出装置20と制御装置30と報知装置40は電気的に配線等で接続される。また、検出装置20で検出された信号は、制御装置30に入力するとそこで処理及び判断が実施され、判断結果により制御装置30から報知装置40に警報が出力される。
【0078】
図7、図8に示した本実施形態の警報装置18では、検出装置20は、電磁波を送受信して物体600、650を検出するドップラーレーダー570〜590である。ドップラーレーダー570は、移動体1の右側の側面4におけるサイドミラー11の下部にその後方の右側面検出領域470を監視して物体を検出するように設けられる。右側面検出領域470は、側面4の死角領域240を含む領域である。
【0079】
ドップラーレーダー580は、移動体1の左側の側面3におけるサイドミラー12の下部にその後方の右側面検出領域490を監視して物体を検出するように設けられる。右側面検出領域490は、側面3の死角領域220を含む領域である。
【0080】
ドップラーレーダー590は、移動体1の後面5におけるリヤバンパー内にその後方の後面検出領域480を監視して物体を検出するように設けられる。後面検出領域480は、後面5の死角領域230を含む領域である。
【0081】
本実施形態の警報装置18では、側面の検出装置20を第1実施形態のビデオカメラ520等からドップラーレーダー570にすることで、制御装置30は、検出信号として受信した電磁波の信号を用いることになり、夜間や暗い場所でも物体600、650を検出できると共に、物体が小さかったり、遠くであっても検出できる。また、ドップラーレーダー570は、第1実施形態のビデオカメラ520等よりも検出範囲が広いため、取り付け位置や取り付け角度の自由度を高くできる。
【0082】
従来の車両用ドップラーレーダーは、移動体の前方等の進行方向における障害物の検出や、移動体の後方から追い上げてくる車両等の検出ができるように、移動体の周囲に設置されていた。しかし、従来のドップラーレーダーは移動体の死角領域にある物体を検出するような角度で設置されていない。
【0083】
制御部30における各死角領域からの検出信号の処理方法、報知装置40における報知方法等は、第1実施形態と同様である。それに加えて検出装置20をドップラーレーダー570〜590とした場合には、以下の各ケース毎に判別して接近する物体を検出して、個別のケース毎に異なる警告(報知)を発生する。
(1)左サイドミラー12下のドップラーレーダー590のみで左後方から接近して追尾する別車両(物)を検出した場合の、左後方からの接近物の存在とその距離及び接近する相対速度についての警告。
(2)右サイドミラー下のドップラーレーダー570のみで右後方から接近して追尾する別車両(物)を検出した場合の、右後方からの接近物の存在とその距離及び接近する相対速度についての警告。
(3)後方のドップラーレーダー580のみで後方から接近して追尾する別車両(物)を検出した場合の、後方からの接近物の存在とその距離及び接近する相対速度についての警告。
(4)左サイドミラー下のドップラーレーダー590と、後方のドップラーレーダー580で左後方から接近して追尾する別車両(物)を検出した場合の、左後方((1)の場合よりもミラーで検出しにくいさらに後方寄りの死角領域)からの接近物の存在とその距離及び接近する相対速度についての警告。
(5)右サイドミラー下のドップラーレーダー570と、後方のドップラーレーダー580で右後方から接近して追尾する別車両(物)を検出した場合の、右後方((2)の場合よりもミラーで検出しにくいさらに後方寄りの死角領域)からの接近物の存在とその距離及び接近する相対速度についての警告。
(6)上記(1)〜(5)の接近物が検出できなくなった場合の、接近物の離脱の報知。
【0084】
上記の各警告や報知が可能になることで本実施形態では、自車の進行方向に対して、左右後方、特に死角領域から接近するバイク、自転車、歩行者等の物体を検出して、巻き込みや接触による事故を防止することができる。また、例えば、渋滞中に渋滞車両間をすり抜けてくるバイク、夜間のバイク、自転車、歩行者等の第1実施形態のビデオカメラでは検出が難しい対象物に対してより素早く検出することができる。また、死角から後方に接近する車両も素早く検出できることから、その接近車両が煽り行為をする前に避難でき、例え、後方から追突されることになっても、事前に知ることで心構えができ、衝撃に対する防御姿勢をとることや頸椎周辺の筋肉に緊張感を持たせて、むち打ち症等の疾病を軽減させることができる。
【0085】
このように、検出装置20を第1実施形態のビデオカメラ510等に代えてドップラーレーダーとすることで、安価に構成でき、夜間の物体検出及び微小な物体の検出について改善することができ、検出範囲が広くなるため、上記のようなさらなる効果をえることができる。また、ドップラーレーダーには、周波数帯が重複する装置の信号による誤報を防止する信号処理回路を設けてもよい。また、ビデオカメラとドップラーレーダーを併用することで、上記した第1実施形態のビデオカメラのみの場合と、ドップラーレーダーのみの場合の個別のメリットに加えて、物体600、650までの距離の精度を高めることができる。
【0086】
以上、本発明を実施の形態を用いて説明したが、本発明は、上記実施の形態に記載の範囲には限定されるものではなく、移動体における運転手の死角領域を検出する装置、特に、従来のカメラ又はドップラーレーダーのように検出対象が他の移動体のために前方空間又は後方空間から検出するのではなく、上方から下方の死角領域の地面に向けて物体を検出する検出装置を有し、死角領域の物体を検出する検出装置を有していれば本発明の効果を得ることが可能である。また、上述した実施形態では、移動体1は、バスの例で説明したが、トラック、乗用車等の自動車、鉄道を移動する列車、海上を移動する船舶としてもよい。
【符号の説明】
【0087】
1 移動体、
2 (移動体の)前面、
3 (移動体の)左側の側面、
4 (移動体の)右側の側面、
5 (移動体の)後面、
7 (移動体の)後輪、
8 (移動体の)前輪、
9 (移動体の進行方向と速度を示すベクトルの)矢印、
10 (移動体の)フロントガラス、
11 (移動体の右側)バックミラー、
12 (移動体の左側)バックミラー、
13 (移動体の左側)サイドガラス、
14 (移動体の右側)サイドガラス、
15 (移動体の)リヤガラス、
18 警報装置、
20 検出装置、
30 制御装置、
31 カメラ画像データ処理部、
32 レーダー受信データ処理部、
33 時刻データ処理部、
34 位置データ処理部、
35 動体からの物体の方向と距離/物体の進行方向演算部、
36 接近判定/相対速度/絶対速度演算部、
37 物体位置/区分領域と移動体位置/地図上領域照合部、
38 警報判断/警報段階選択部、
39 警報出力部、
40 報知装置、
41 ディスプレイ装置、
42 車内スピーカ、
43 車外スピーカ、
100 運転手、
110 視認可能となる位置、
120 (移動体左側の)後方、
130 (移動体右側の)後方、
210 (移動体前側の)死角領域、
220 (移動体左側の)死角領域、
230 (移動体後側の)死角領域、
240 (移動体右側の)死角領域、
310 (移動体前側の視認可能位置までの)距離、
410 (移動体の)前面撮影領域、
420 (移動体の)左側面前側撮影領域、
430 (移動体の)左側面後側撮影領域、
440 (移動体の)後面撮影領域、
450 (移動体の)右側面後側撮影領域、
460 (移動体の)右側面前側撮影領域、
470 (移動体の)右側面検出領域、
480 (移動体の)左側面検出領域、
490 (移動体の)後面検出領域、
510 (移動体の前面)ビデオカメラ、
520 (移動体の左側面前側)ビデオカメラ、
530 (移動体の左側面後側)ビデオカメラ、
540 (移動体の後面)ビデオカメラ、
550 (移動体の右側面後側)ビデオカメラ、
560 (移動体の右側面前側)ビデオカメラ、
570 (移動体の右側面)ドップラーレーダー、
580 (移動体の左側面)ドップラーレーダー、
590 (移動体の後面)ドップラーレーダー、
610、620 (人:物体600の進行方向と速度を示すベクトルの)矢印、
600 物体(人)、
650 物体(飛来物:鳥、ボール等)、
660、670 (人:物体600の進行方向と速度を示すベクトルの)矢印、
710 A区分領域、
720 B区分領域、
730 C区分領域。
【特許請求の範囲】
【請求項1】
移動体の周囲の物体を検出した場合に検出信号を出力する複数の検出手段と、
前記複数の検出手段による各検出信号の検出時期に基づき、前記移動体に対する前記物体の距離、検出された方向、及び、前記移動体における前記物体のある方向の危険度のうち少なくとも何れか2つを判断する制御手段と、
前記判断結果に基づき当該移動体における前記物体がある方向の危険度を報知する報知手段と
を含むことを特徴とする警報装置。
【請求項2】
前記制御手段は、前記物体の進行方向、前記移動体へ前記物体が接近中か否か、についても判断する
ことを特徴とする請求項1に記載の警報装置。
【請求項3】
前記検出手段は、
光学的に物体を撮像するカメラであり、
前記制御手段は、
前記検出信号として撮像された画像情報を用いる
ことを特徴とする請求項1又は2に記載の警報装置。
【請求項4】
前記検出手段は、
電磁波を送受信して物体を検出するドップラーレーダーであり、
前記制御手段は、
前記検出信号として受信した電磁波の信号を用いる
ことを特徴とする請求項1又は2に記載の警報装置。
【請求項5】
前記制御手段は、
前記物体が、前記移動体からの距離により予め複数に分けられた各区分領域の何れの領域内に位置するかを判断し、
前記報知手段は、
当該判断結果に応じて異なる警報を出力する
ことを特徴とする請求項1〜4の何れか1項に記載の警報装置。
【請求項6】
前記制御手段は、前記検出手段の検出信号に基づき、前記移動体の周囲に危険度に応じた1つ以上の領域を登録し、前記領域と前記物体の位置関係を判断し、
前記報知手段は、前記領域と前記物体の位置関係に応じて異なる警報を出力する
ことを特徴とする請求項1〜5の何れか1項に記載の警報装置。
【請求項7】
前記制御手段は、前記移動体の車両の大きさ、並びに、前記検出手段の前記移動体への設置高及び取付角度を利用して前記領域の初期値を登録する。
ことを特徴とする請求項6に記載の警報装置。
【請求項8】
前記検出手段は、
前記移動体の地上の位置を検出し、
前記制御手段は、
前記移動体が予め複数に分けられた地上の領域内に位置するかを判断し、
前記報知手段は、
前記移動体が異なる区分領域にある場合に異なる警報を出力する
ことを特徴とする請求項1〜7の何れか1項に記載の警報装置。
【請求項9】
前記制御手段は、さらに、物体の接近する相対速度を求め、
前記報知手段は、前記相対速度に応じて段階的警報を出力する
ことを特徴とする請求項請求項1〜8の何れか1項に記載の警報装置。
【請求項10】
前記制御手段は、さらに他の装置から入力する車速信号を加味して危険度を判断する
ことを特徴とする請求項1〜9に記載の警報装置。
【請求項11】
前記制御手段は、さらに前記接近中の物体が人であるか否かを判断し、
前記報知手段は、前記接近する物体が人である場合には、前記移動体の外部にも警報を出力する
ことを特徴とする請求項1〜9に記載の警報装置。
【請求項1】
移動体の周囲の物体を検出した場合に検出信号を出力する複数の検出手段と、
前記複数の検出手段による各検出信号の検出時期に基づき、前記移動体に対する前記物体の距離、検出された方向、及び、前記移動体における前記物体のある方向の危険度のうち少なくとも何れか2つを判断する制御手段と、
前記判断結果に基づき当該移動体における前記物体がある方向の危険度を報知する報知手段と
を含むことを特徴とする警報装置。
【請求項2】
前記制御手段は、前記物体の進行方向、前記移動体へ前記物体が接近中か否か、についても判断する
ことを特徴とする請求項1に記載の警報装置。
【請求項3】
前記検出手段は、
光学的に物体を撮像するカメラであり、
前記制御手段は、
前記検出信号として撮像された画像情報を用いる
ことを特徴とする請求項1又は2に記載の警報装置。
【請求項4】
前記検出手段は、
電磁波を送受信して物体を検出するドップラーレーダーであり、
前記制御手段は、
前記検出信号として受信した電磁波の信号を用いる
ことを特徴とする請求項1又は2に記載の警報装置。
【請求項5】
前記制御手段は、
前記物体が、前記移動体からの距離により予め複数に分けられた各区分領域の何れの領域内に位置するかを判断し、
前記報知手段は、
当該判断結果に応じて異なる警報を出力する
ことを特徴とする請求項1〜4の何れか1項に記載の警報装置。
【請求項6】
前記制御手段は、前記検出手段の検出信号に基づき、前記移動体の周囲に危険度に応じた1つ以上の領域を登録し、前記領域と前記物体の位置関係を判断し、
前記報知手段は、前記領域と前記物体の位置関係に応じて異なる警報を出力する
ことを特徴とする請求項1〜5の何れか1項に記載の警報装置。
【請求項7】
前記制御手段は、前記移動体の車両の大きさ、並びに、前記検出手段の前記移動体への設置高及び取付角度を利用して前記領域の初期値を登録する。
ことを特徴とする請求項6に記載の警報装置。
【請求項8】
前記検出手段は、
前記移動体の地上の位置を検出し、
前記制御手段は、
前記移動体が予め複数に分けられた地上の領域内に位置するかを判断し、
前記報知手段は、
前記移動体が異なる区分領域にある場合に異なる警報を出力する
ことを特徴とする請求項1〜7の何れか1項に記載の警報装置。
【請求項9】
前記制御手段は、さらに、物体の接近する相対速度を求め、
前記報知手段は、前記相対速度に応じて段階的警報を出力する
ことを特徴とする請求項請求項1〜8の何れか1項に記載の警報装置。
【請求項10】
前記制御手段は、さらに他の装置から入力する車速信号を加味して危険度を判断する
ことを特徴とする請求項1〜9に記載の警報装置。
【請求項11】
前記制御手段は、さらに前記接近中の物体が人であるか否かを判断し、
前記報知手段は、前記接近する物体が人である場合には、前記移動体の外部にも警報を出力する
ことを特徴とする請求項1〜9に記載の警報装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−238161(P2011−238161A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−110918(P2010−110918)
【出願日】平成22年5月13日(2010.5.13)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月13日(2010.5.13)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]