
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、赤外線センサを用いた運転者状態監視装置及びその方法に係り、より詳しくは赤外線LED及びカメラを用いる赤外線センサを用いた運転者状態監視装置及びその方法に関する。
【背景技術】
【0002】
一般に、運転者状態監視装置は、カメラを用いて運転者の顔、状態、姿勢などを撮影してこれを分析することにより、運転者の状態を確認し、運転者の不注意、眠気などが確認できる装置である。運転者状態監視装置で、夜間又は暗い環境でもカメラ撮影を円滑にするため、主に所定の照明装置がカメラとともに備えられる。
【0003】
しかし、カメラで撮影された映像だけで運転者状態を確認するのは、走行中の光環境変化による劣化現象、カメラレンズの異物による映像不良、運転者の顔の一部確認不可能、運転者姿勢の変更に伴う運転者状態の未認識などに起因する誤謬に適宜対応することができず、無条件に認識誤謬を処理する問題点がある。さらに、無条件に認識誤謬を処理する場合、どのような問題のため認識誤謬が発生したのか使用者が知ることができないため、認識誤謬に対する適宜な対応ができない問題点がある。
従って、一般の運転者状態監視装置は認識誤謬だけでなく、認識誤謬を修正する方法も知ることができない問題点がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−225089号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供することにその目的がある。
【課題を解決するための手段】
【0006】
本発明は、光信号を発光する発光部及び前記光信号を受光する受光部を含み、前記発光部から発光される光信号及び前記受光部により受光される光信号の位相差を用い、正面の障害物までの距離を測定する赤外線センサ、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ、及び前記赤外線センサ及び前記顔認識カメラを介して測定されたデータを用いて認識誤謬発生可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部を含むことを特徴とする。
【0007】
また、本発明は発光部から発光される光信号及び受光部により受光される光信号の位相差を用い、赤外線センサを介して正面の障害物までの距離を測定する第1段階、顔認識カメラを介して運転者の顔を撮影し、撮影された映像で運転者の顔を検出する第2段階、及び電子制御部を介して前記第1段階及び前記第2段階で測定されたデータを用いて認識誤謬発生可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する第3段階を含む。
【発明の効果】
【0008】
本発明によれば、運転者状態監視装置で周辺環境又は運転者の姿勢に従い発生する認識誤謬を低減することができる。
また、カメラだけでなく赤外線センサが用いられるので、認識誤謬を場合の数に従い分類することができるので、各認識誤謬の原因を把握することができる。
さらに、使用者に誤謬メッセージを提供することにより、使用者が認識誤謬を修正できるように誘導することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施例に係る運転者状態監視装置の構成を示す図である。
【図2】車両に備えられる本発明の一実施例に係る運転者状態監視装置を示す図である。
【図3】本発明の一実施例に係る運転者状態監視方法を示すフローチャートである。
【図4】本発明の一実施例に係る運転者との距離確認方法を示す図である。
【発明を実施するための最良の形態】
【0010】
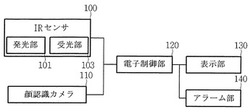
図1は、本発明の一実施例に係る運転者状態監視装置の構成を示す図である。
図1に示すように、本発明に係る運転者状態監視装置は赤外線(IR、Infra Ray)センサ100、顔認識カメラ110、電子制御部120、表示部130、アラーム部140を含む。
赤外線センサ100は正面の障害物と赤外線センサ100との間の距離を測定するための装置であって、所定の光信号を発光する発光部101及び周辺の光信号を受光する受光部103を含む。
【0011】
発光部101は所定の光信号を発光して顔認識カメラ110に対しては照明装置としての役割を、また、受光部103に対しては受光対象となる光を発光する役割を有する。発光部101として、可視光線又は遠赤外線領域帯のLED(Light Emitting Diode)が用いられることもあるが、主に赤外線LED(IR Light Emitting Diode)が用いられる。
発光部101から発光される光信号、及び受光部103により受光される光信号との間の位相差に応じて赤外線センサ100と正面の障害物との距離が測定される。ここで正面の障害物とは、運転者の顔、運転者の上体、運転者の座席など、発光部101及び受光部103の正面に存在するものなどを意味する。赤外線センサ100と正面の障害物との間の距離測定方法は、下記図4で詳しく説明する。
【0012】
顔認識カメラ110は運転者の顔を撮影する装置である。顔認識カメラ110によって撮影された映像で運転者の顔が検出される。顔認識カメラ110は赤外線センサ100と並んで配置される場合が多いので、顔認識カメラ110の前に置かれる物体は赤外線センサ100の正面の障害物と認識される。
電子制御部120は、赤外線センサ100及び顔認識カメラ110により測定されたデータに基づいて認識誤謬発生可否を判別し、認識誤謬が発生しない場合、現在の運転者状態を確認し、認識誤謬が発生した場合、発生した認識誤謬を分析する装置である。従って、認識誤謬が発生しない場合にのみ、電子制御部120は現在運転者状態を確認し、正常運転状態か、運転不注意状態かを判断することができる。
【0013】
さらに、電子制御部120は分析された認識誤謬に従い表示部130を介して使用者に適宜な案内メッセージを提供し、運転者が適切な措置を採れるようにする。
電子制御部120は、赤外線センサ100及び顔認識カメラ110により測定されたデータを用い、各場合の数に従い認識誤謬を分析することができる。従って、電子制御部120は赤外線センサ100により測定された距離に従い現在正面の障害物が何か、運転者の姿勢が正常かなどを判断することができる。
【0014】
例えば、測定された距離が0cm〜30cmの場合、顔認識カメラ110の前に物体又は運転者の顔が非常に近くにあると判断し、測定された距離が40cm〜60cmの場合、運転者の姿勢が正常状態であり、測定された距離は運転者の上体までの距離であると判断し、測定された距離が80cm〜90cmの場合、運転者の姿勢が異常であり、測定された距離は運転者のシートまでの距離であると判断する。
【0015】
表示部130は、電子制御部120から伝送される信号に応じて運転者の状態を示す運転者状態メッセージ、発生した認識誤謬を示す認識誤謬メッセージ、発生した認識誤謬を分析した認識誤謬分析メッセージ、又は認識誤謬の分析結果に従い認識誤謬修正のための案内メッセージを表示する。運転者状態メッセージは正常運転状態、又は運転不注意状態別に示される。
アラーム部140は電子制御部120の判断結果、運転不注意状態の場合、警報アラームを出力する。アラーム部140は音声出力装置であって、認識誤謬が発生した場合、認識誤謬メッセージ又は認識誤謬分析メッセージを音声で出力することもできる。
【0016】
例えば、一般の光環境及び運転姿勢の場合、赤外線センサ100により測定された運転者の上体までの距離が40cm〜60cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出される場合、電子制御装置120は認識誤謬が発生しないと判断し、現在運転者状態を確認する。運転者状態確認結果は正常運転状態、又は運転不注意状態に区分され、表示部130又はアラーム部140を介してメッセージ又は警報アラームが出力される。
【0017】
他の例として、運転者の顔がカメラに近接する場合、赤外線センサ100により測定された運転者の顔までの距離が0cm〜20cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御装置120は認識誤謬が発生したものと判断し、顔検出不可状態と分析して認識誤謬メッセージ、及び運転者状態監視のために運転者の姿勢を確認せよとの案内メッセージを表示部130又はアラーム部140を介して出力する。
【0018】
また、他の例として、顔認識カメラ110の前に物体が存在する場合、赤外線センサ100により測定された物体までの距離が15cmの固定された値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御部120は認識誤謬が発生したものと判断し、顔検出不可状態と分析して認識誤謬メッセージ、及び顔認識カメラ110の前に置かれた物体を確認せよとの案内メッセージを表示部130又はアラーム部140を介して出力する。
【0019】
また、他の例として、逆光又は測光によって顔が非常に暗いか明るい状態の場合、赤外線センサ100により測定された運転者の上体までの距離が40cm〜60cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御部120は認識誤謬が発生したものと判断し、顔検出不可状態と分析して認識誤謬メッセージ、及び光環境を調節せよとの案内メッセージを表示部130又はアラーム部140を介して出力するこ。
【0020】
また、他の例として、運転者が座った姿勢で運転者の顔が検出されない場合、赤外線センサ100により測定された運転者のシートまでの距離が80cm〜90cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御部120は認識誤謬が発生したものと判断し、誤検出状態と分析して状態判断ができないとの誤謬認識メッセージを表示部130又はアラーム部140を介して出力する。
【0021】
さらに他の例として、一般の光環境で運転者の顔が検出されない場合、赤外線センサ100により測定された運転者の上体までの距離が40cm〜60cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御部120は認識誤謬が発生したものと判断し、誤検出状態と分析して状態判断ができないとの誤謬認識メッセージを表示部130又はアラーム部140を介して出力する。
【0022】
赤外線センサ100により測定される距離に対する判断基準は、上記実施例に記載されたcm範囲に限定されるのではなく、実際運転者の顔までの距離又は実際運転者の上体までの距離は運転者の体形や運転習慣に従い変更される。従って、運転者別プロファイルを登録して赤外線センサ100により測定される距離に対する判断基準を適用することもできる。
【0023】
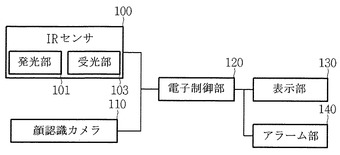
図2は、車両に備えられる本発明の一実施例に係る運転者状態監視装置を示す図である。
図2に示すように、本発明の運転者状態監視装置の赤外線センサ100及び顔認識カメラ110は、同一平面に備えることができる。2つの発光部101の間に1つの受光部103を配置し、顔認識カメラ110の両側にそれぞれ配置することができる。従って、正面の障害物までの距離が赤外線センサ100により測定され、顔認識カメラ110により運転者の顔が撮影される。
【0024】
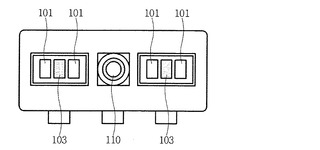
図3は、本発明の一実施例に係る運転者状態監視方法を示すフローチャートである。
図3に示すように、まず運転者の顔に対する映像が撮影される(S200)。次に、発光部101が光信号を発光し、受光部103が上記光信号を受光する(S210)。S200段階及びS210段階は同時に生じることもあり、前後の順序が変更されることもある。
次に、発光部101から発光された光信号、及び受光部103により受光された光信号の位相差を用い、赤外線センサ100の正面の障害物までの距離が推定される(S220)。
【0025】
S220段階で推定された障害物までの距離、及びS200段階で撮影された運転者の顔映像が電子制御部120によって分析される(S230)。
次に、S230段階で分析された結果に応じて所定のメッセージ又はアラームが、表示部130又はアラーム部140を介して出力される(S240)。上記所定のメッセージは運転者状態メッセージ、認識誤謬メッセージ、認識誤謬分析メッセージ又は案内メッセージである。
【0026】
図4は、本発明の一実施例に係る運転者との距離確認方法を示す図である。
図4に示すように、発光部101がtR間隔でt0時間のあいだ光信号を発光すると、受光部103はtDほど遅延した時間以後に光信号を受光する。
このとき、発光部101及び受光部103を含む赤外線センサ100から正面に存在する障害物までの距離は、下記式(数1)のように算出され、下記式(数1)は障害物までの距離1M内外でcm単位の精度を有する。
【0027】
【数1】

ここで、Dは障害物までの距離であり、cは光の速度である。
上記のように、本発明によれば、赤外線センサ100から正面に存在する障害物までの距離を精密に推定することができるので、カメラ環境又は運転者の姿勢などにより変更される障害物までの距離が確認され、同時に運転者の顔も顔認識カメラ110により認識される。
従って、本発明はそれぞれのデータを用いて認識誤謬を確認することができ、認識誤謬を分析して原因を捜し出して認識誤謬を修正することができる。
【0028】
本発明は、プロセッサが読み取り可能な記録媒体に、プロセッサが読み取り可能なコードとして具現することが可能である。プロセッサが読み取り可能な記録媒体はプロセッサにより読み取られるデータが格納される全種類の記録装置を含む。プロセッサが読み取り可能な記録媒体の例としてはROM、RAM、CD−ROM、磁気テープ、フロッピー(登録商標)ディスク、光データ格納装置などがある。さらに、プロセッサが読み取り可能な記録媒体はネットワークで連結されたコンピュータシステムに分散され、分散方式でプロセッサの読み取り可能なコードが格納され実行される。
【0029】
以上、本発明に関する好ましい実施形態を説明したが、本発明は上記実施例に限定されず、本発明の属する技術範囲を逸脱しない範囲での全ての変更が含まれる。
【符号の説明】
【0030】
100 赤外線センサ
101 発光部
103 受光部
110 顔認識カメラ
120 電子制御部
130 表示部
140 アラーム部
【技術分野】
【0001】
本発明は、赤外線センサを用いた運転者状態監視装置及びその方法に係り、より詳しくは赤外線LED及びカメラを用いる赤外線センサを用いた運転者状態監視装置及びその方法に関する。
【背景技術】
【0002】
一般に、運転者状態監視装置は、カメラを用いて運転者の顔、状態、姿勢などを撮影してこれを分析することにより、運転者の状態を確認し、運転者の不注意、眠気などが確認できる装置である。運転者状態監視装置で、夜間又は暗い環境でもカメラ撮影を円滑にするため、主に所定の照明装置がカメラとともに備えられる。
【0003】
しかし、カメラで撮影された映像だけで運転者状態を確認するのは、走行中の光環境変化による劣化現象、カメラレンズの異物による映像不良、運転者の顔の一部確認不可能、運転者姿勢の変更に伴う運転者状態の未認識などに起因する誤謬に適宜対応することができず、無条件に認識誤謬を処理する問題点がある。さらに、無条件に認識誤謬を処理する場合、どのような問題のため認識誤謬が発生したのか使用者が知ることができないため、認識誤謬に対する適宜な対応ができない問題点がある。
従って、一般の運転者状態監視装置は認識誤謬だけでなく、認識誤謬を修正する方法も知ることができない問題点がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−225089号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供することにその目的がある。
【課題を解決するための手段】
【0006】
本発明は、光信号を発光する発光部及び前記光信号を受光する受光部を含み、前記発光部から発光される光信号及び前記受光部により受光される光信号の位相差を用い、正面の障害物までの距離を測定する赤外線センサ、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ、及び前記赤外線センサ及び前記顔認識カメラを介して測定されたデータを用いて認識誤謬発生可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部を含むことを特徴とする。
【0007】
また、本発明は発光部から発光される光信号及び受光部により受光される光信号の位相差を用い、赤外線センサを介して正面の障害物までの距離を測定する第1段階、顔認識カメラを介して運転者の顔を撮影し、撮影された映像で運転者の顔を検出する第2段階、及び電子制御部を介して前記第1段階及び前記第2段階で測定されたデータを用いて認識誤謬発生可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する第3段階を含む。
【発明の効果】
【0008】
本発明によれば、運転者状態監視装置で周辺環境又は運転者の姿勢に従い発生する認識誤謬を低減することができる。
また、カメラだけでなく赤外線センサが用いられるので、認識誤謬を場合の数に従い分類することができるので、各認識誤謬の原因を把握することができる。
さらに、使用者に誤謬メッセージを提供することにより、使用者が認識誤謬を修正できるように誘導することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施例に係る運転者状態監視装置の構成を示す図である。
【図2】車両に備えられる本発明の一実施例に係る運転者状態監視装置を示す図である。
【図3】本発明の一実施例に係る運転者状態監視方法を示すフローチャートである。
【図4】本発明の一実施例に係る運転者との距離確認方法を示す図である。
【発明を実施するための最良の形態】
【0010】
図1は、本発明の一実施例に係る運転者状態監視装置の構成を示す図である。
図1に示すように、本発明に係る運転者状態監視装置は赤外線(IR、Infra Ray)センサ100、顔認識カメラ110、電子制御部120、表示部130、アラーム部140を含む。
赤外線センサ100は正面の障害物と赤外線センサ100との間の距離を測定するための装置であって、所定の光信号を発光する発光部101及び周辺の光信号を受光する受光部103を含む。
【0011】
発光部101は所定の光信号を発光して顔認識カメラ110に対しては照明装置としての役割を、また、受光部103に対しては受光対象となる光を発光する役割を有する。発光部101として、可視光線又は遠赤外線領域帯のLED(Light Emitting Diode)が用いられることもあるが、主に赤外線LED(IR Light Emitting Diode)が用いられる。
発光部101から発光される光信号、及び受光部103により受光される光信号との間の位相差に応じて赤外線センサ100と正面の障害物との距離が測定される。ここで正面の障害物とは、運転者の顔、運転者の上体、運転者の座席など、発光部101及び受光部103の正面に存在するものなどを意味する。赤外線センサ100と正面の障害物との間の距離測定方法は、下記図4で詳しく説明する。
【0012】
顔認識カメラ110は運転者の顔を撮影する装置である。顔認識カメラ110によって撮影された映像で運転者の顔が検出される。顔認識カメラ110は赤外線センサ100と並んで配置される場合が多いので、顔認識カメラ110の前に置かれる物体は赤外線センサ100の正面の障害物と認識される。
電子制御部120は、赤外線センサ100及び顔認識カメラ110により測定されたデータに基づいて認識誤謬発生可否を判別し、認識誤謬が発生しない場合、現在の運転者状態を確認し、認識誤謬が発生した場合、発生した認識誤謬を分析する装置である。従って、認識誤謬が発生しない場合にのみ、電子制御部120は現在運転者状態を確認し、正常運転状態か、運転不注意状態かを判断することができる。
【0013】
さらに、電子制御部120は分析された認識誤謬に従い表示部130を介して使用者に適宜な案内メッセージを提供し、運転者が適切な措置を採れるようにする。
電子制御部120は、赤外線センサ100及び顔認識カメラ110により測定されたデータを用い、各場合の数に従い認識誤謬を分析することができる。従って、電子制御部120は赤外線センサ100により測定された距離に従い現在正面の障害物が何か、運転者の姿勢が正常かなどを判断することができる。
【0014】
例えば、測定された距離が0cm〜30cmの場合、顔認識カメラ110の前に物体又は運転者の顔が非常に近くにあると判断し、測定された距離が40cm〜60cmの場合、運転者の姿勢が正常状態であり、測定された距離は運転者の上体までの距離であると判断し、測定された距離が80cm〜90cmの場合、運転者の姿勢が異常であり、測定された距離は運転者のシートまでの距離であると判断する。
【0015】
表示部130は、電子制御部120から伝送される信号に応じて運転者の状態を示す運転者状態メッセージ、発生した認識誤謬を示す認識誤謬メッセージ、発生した認識誤謬を分析した認識誤謬分析メッセージ、又は認識誤謬の分析結果に従い認識誤謬修正のための案内メッセージを表示する。運転者状態メッセージは正常運転状態、又は運転不注意状態別に示される。
アラーム部140は電子制御部120の判断結果、運転不注意状態の場合、警報アラームを出力する。アラーム部140は音声出力装置であって、認識誤謬が発生した場合、認識誤謬メッセージ又は認識誤謬分析メッセージを音声で出力することもできる。
【0016】
例えば、一般の光環境及び運転姿勢の場合、赤外線センサ100により測定された運転者の上体までの距離が40cm〜60cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出される場合、電子制御装置120は認識誤謬が発生しないと判断し、現在運転者状態を確認する。運転者状態確認結果は正常運転状態、又は運転不注意状態に区分され、表示部130又はアラーム部140を介してメッセージ又は警報アラームが出力される。
【0017】
他の例として、運転者の顔がカメラに近接する場合、赤外線センサ100により測定された運転者の顔までの距離が0cm〜20cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御装置120は認識誤謬が発生したものと判断し、顔検出不可状態と分析して認識誤謬メッセージ、及び運転者状態監視のために運転者の姿勢を確認せよとの案内メッセージを表示部130又はアラーム部140を介して出力する。
【0018】
また、他の例として、顔認識カメラ110の前に物体が存在する場合、赤外線センサ100により測定された物体までの距離が15cmの固定された値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御部120は認識誤謬が発生したものと判断し、顔検出不可状態と分析して認識誤謬メッセージ、及び顔認識カメラ110の前に置かれた物体を確認せよとの案内メッセージを表示部130又はアラーム部140を介して出力する。
【0019】
また、他の例として、逆光又は測光によって顔が非常に暗いか明るい状態の場合、赤外線センサ100により測定された運転者の上体までの距離が40cm〜60cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御部120は認識誤謬が発生したものと判断し、顔検出不可状態と分析して認識誤謬メッセージ、及び光環境を調節せよとの案内メッセージを表示部130又はアラーム部140を介して出力するこ。
【0020】
また、他の例として、運転者が座った姿勢で運転者の顔が検出されない場合、赤外線センサ100により測定された運転者のシートまでの距離が80cm〜90cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御部120は認識誤謬が発生したものと判断し、誤検出状態と分析して状態判断ができないとの誤謬認識メッセージを表示部130又はアラーム部140を介して出力する。
【0021】
さらに他の例として、一般の光環境で運転者の顔が検出されない場合、赤外線センサ100により測定された運転者の上体までの距離が40cm〜60cmの間の値と推定され、顔認識カメラ110により撮影された映像で運転者の顔が正常に検出されない場合、電子制御部120は認識誤謬が発生したものと判断し、誤検出状態と分析して状態判断ができないとの誤謬認識メッセージを表示部130又はアラーム部140を介して出力する。
【0022】
赤外線センサ100により測定される距離に対する判断基準は、上記実施例に記載されたcm範囲に限定されるのではなく、実際運転者の顔までの距離又は実際運転者の上体までの距離は運転者の体形や運転習慣に従い変更される。従って、運転者別プロファイルを登録して赤外線センサ100により測定される距離に対する判断基準を適用することもできる。
【0023】
図2は、車両に備えられる本発明の一実施例に係る運転者状態監視装置を示す図である。
図2に示すように、本発明の運転者状態監視装置の赤外線センサ100及び顔認識カメラ110は、同一平面に備えることができる。2つの発光部101の間に1つの受光部103を配置し、顔認識カメラ110の両側にそれぞれ配置することができる。従って、正面の障害物までの距離が赤外線センサ100により測定され、顔認識カメラ110により運転者の顔が撮影される。
【0024】
図3は、本発明の一実施例に係る運転者状態監視方法を示すフローチャートである。
図3に示すように、まず運転者の顔に対する映像が撮影される(S200)。次に、発光部101が光信号を発光し、受光部103が上記光信号を受光する(S210)。S200段階及びS210段階は同時に生じることもあり、前後の順序が変更されることもある。
次に、発光部101から発光された光信号、及び受光部103により受光された光信号の位相差を用い、赤外線センサ100の正面の障害物までの距離が推定される(S220)。
【0025】
S220段階で推定された障害物までの距離、及びS200段階で撮影された運転者の顔映像が電子制御部120によって分析される(S230)。
次に、S230段階で分析された結果に応じて所定のメッセージ又はアラームが、表示部130又はアラーム部140を介して出力される(S240)。上記所定のメッセージは運転者状態メッセージ、認識誤謬メッセージ、認識誤謬分析メッセージ又は案内メッセージである。
【0026】
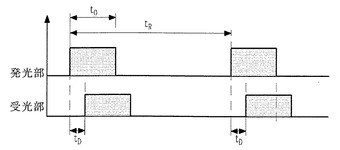
図4は、本発明の一実施例に係る運転者との距離確認方法を示す図である。
図4に示すように、発光部101がtR間隔でt0時間のあいだ光信号を発光すると、受光部103はtDほど遅延した時間以後に光信号を受光する。
このとき、発光部101及び受光部103を含む赤外線センサ100から正面に存在する障害物までの距離は、下記式(数1)のように算出され、下記式(数1)は障害物までの距離1M内外でcm単位の精度を有する。
【0027】
【数1】
ここで、Dは障害物までの距離であり、cは光の速度である。
上記のように、本発明によれば、赤外線センサ100から正面に存在する障害物までの距離を精密に推定することができるので、カメラ環境又は運転者の姿勢などにより変更される障害物までの距離が確認され、同時に運転者の顔も顔認識カメラ110により認識される。
従って、本発明はそれぞれのデータを用いて認識誤謬を確認することができ、認識誤謬を分析して原因を捜し出して認識誤謬を修正することができる。
【0028】
本発明は、プロセッサが読み取り可能な記録媒体に、プロセッサが読み取り可能なコードとして具現することが可能である。プロセッサが読み取り可能な記録媒体はプロセッサにより読み取られるデータが格納される全種類の記録装置を含む。プロセッサが読み取り可能な記録媒体の例としてはROM、RAM、CD−ROM、磁気テープ、フロッピー(登録商標)ディスク、光データ格納装置などがある。さらに、プロセッサが読み取り可能な記録媒体はネットワークで連結されたコンピュータシステムに分散され、分散方式でプロセッサの読み取り可能なコードが格納され実行される。
【0029】
以上、本発明に関する好ましい実施形態を説明したが、本発明は上記実施例に限定されず、本発明の属する技術範囲を逸脱しない範囲での全ての変更が含まれる。
【符号の説明】
【0030】
100 赤外線センサ
101 発光部
103 受光部
110 顔認識カメラ
120 電子制御部
130 表示部
140 アラーム部
【特許請求の範囲】
【請求項1】
光信号を発光する発光部及び前記光信号を受光する受光部を含み、前記発光部から発光される光信号及び上記受光部により受光される光信号の位相差を用い、正面の障害物までの距離を測定する赤外線センサ、
運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ、及び
前記赤外線センサ及び前記顔認識カメラを介して測定されたデータを用いて認識誤謬発生可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部、
を含むことを特徴とする運転者状態監視装置。
【請求項2】
前記認識誤謬が発生した場合、認識誤謬メッセージ、認識誤謬分析メッセージ及び案内メッセージのうち少なくとも一つを示す表示部をさらに含むことを特徴とする請求項1に記載の運転者状態監視装置。
【請求項3】
前記正面の障害物は、運転者の顔、運転者の上体及び運転者の座席のうち何れか一つであることを特徴とする請求項1に記載の運転者状態監視装置。
【請求項4】
前記電子制御部は、前記赤外線センサにより測定された距離に従い前記正面の障害物又は運転者の姿勢を確認することができることを特徴とする請求項1に記載の運転者状態監視装置。
【請求項5】
前記赤外線センサは、前記光信号が前記発光部により発光され、前記受光部により受光される時までの遅延時間を用いて、前記正面の障害物までの距離を測定することを特徴とする請求項1に記載の運転者状態監視装置。
【請求項6】
前記認識誤謬が発生しない場合、前記電子制御部は前記赤外線センサ及び前記顔認識カメラを介して測定されたデータを用いて運転者状態が正常運転状態か、又は運転不注意状態かを判断することを特徴とする請求項1に記載の運転者状態監視装置。
【請求項7】
前記電子制御部の判断結果、運転不注意状態の場合、警報アラームを出力するアラーム部をさらに含むことを特徴とする請求項6に記載の運転者状態監視装置。
【請求項8】
発光部から発光される光信号及び受光部により受光される光信号の位相差を用い、赤外線センサを介して正面の障害物までの距離を測定する第1段階、
顔認識カメラを介して運転者の顔を撮影し、撮影された映像で運転者の顔を検出する第2段階、及び
電子制御部を介して前記第1段階及び前記第2段階で測定されたデータを用いて認識誤謬発生可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析することを特徴とする第3段階を含む運転者状態監視方法。
【請求項9】
前記認識誤謬が発生した場合、認識誤謬メッセージ、認識誤謬分析メッセージ及び案内メッセージのうち少なくとも一つを表示部を介して表示する第4段階をさらに含むことを特徴とする請求項8に記載の運転者状態監視方法。
【請求項10】
前記正面の障害物は、運転者の顔、運転者の上体及び運転者の座席のうち何れか一つであることを特徴とする請求項8に記載の運転者状態監視方法。
【請求項11】
前記電子制御部は、前記第1段階で測定された距離に従い前記正面の障害物又は運転者の姿勢を確認することができることを特徴とする請求項8に記載の運転者状態監視方法。
【請求項12】
前記第1段階は、前記光信号が前記発光部により発光され、前記受光部により受光される時までの遅延時間を用いて、前記正面の障害物までの距離を測定することを特徴とする請求項8に記載の運転者状態監視方法。
【請求項1】
光信号を発光する発光部及び前記光信号を受光する受光部を含み、前記発光部から発光される光信号及び上記受光部により受光される光信号の位相差を用い、正面の障害物までの距離を測定する赤外線センサ、
運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ、及び
前記赤外線センサ及び前記顔認識カメラを介して測定されたデータを用いて認識誤謬発生可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部、
を含むことを特徴とする運転者状態監視装置。
【請求項2】
前記認識誤謬が発生した場合、認識誤謬メッセージ、認識誤謬分析メッセージ及び案内メッセージのうち少なくとも一つを示す表示部をさらに含むことを特徴とする請求項1に記載の運転者状態監視装置。
【請求項3】
前記正面の障害物は、運転者の顔、運転者の上体及び運転者の座席のうち何れか一つであることを特徴とする請求項1に記載の運転者状態監視装置。
【請求項4】
前記電子制御部は、前記赤外線センサにより測定された距離に従い前記正面の障害物又は運転者の姿勢を確認することができることを特徴とする請求項1に記載の運転者状態監視装置。
【請求項5】
前記赤外線センサは、前記光信号が前記発光部により発光され、前記受光部により受光される時までの遅延時間を用いて、前記正面の障害物までの距離を測定することを特徴とする請求項1に記載の運転者状態監視装置。
【請求項6】
前記認識誤謬が発生しない場合、前記電子制御部は前記赤外線センサ及び前記顔認識カメラを介して測定されたデータを用いて運転者状態が正常運転状態か、又は運転不注意状態かを判断することを特徴とする請求項1に記載の運転者状態監視装置。
【請求項7】
前記電子制御部の判断結果、運転不注意状態の場合、警報アラームを出力するアラーム部をさらに含むことを特徴とする請求項6に記載の運転者状態監視装置。
【請求項8】
発光部から発光される光信号及び受光部により受光される光信号の位相差を用い、赤外線センサを介して正面の障害物までの距離を測定する第1段階、
顔認識カメラを介して運転者の顔を撮影し、撮影された映像で運転者の顔を検出する第2段階、及び
電子制御部を介して前記第1段階及び前記第2段階で測定されたデータを用いて認識誤謬発生可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析することを特徴とする第3段階を含む運転者状態監視方法。
【請求項9】
前記認識誤謬が発生した場合、認識誤謬メッセージ、認識誤謬分析メッセージ及び案内メッセージのうち少なくとも一つを表示部を介して表示する第4段階をさらに含むことを特徴とする請求項8に記載の運転者状態監視方法。
【請求項10】
前記正面の障害物は、運転者の顔、運転者の上体及び運転者の座席のうち何れか一つであることを特徴とする請求項8に記載の運転者状態監視方法。
【請求項11】
前記電子制御部は、前記第1段階で測定された距離に従い前記正面の障害物又は運転者の姿勢を確認することができることを特徴とする請求項8に記載の運転者状態監視方法。
【請求項12】
前記第1段階は、前記光信号が前記発光部により発光され、前記受光部により受光される時までの遅延時間を用いて、前記正面の障害物までの距離を測定することを特徴とする請求項8に記載の運転者状態監視方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−54717(P2013−54717A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−268714(P2011−268714)
【出願日】平成23年12月8日(2011.12.8)
【出願人】(591251636)現代自動車株式会社 (1,064)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年12月8日(2011.12.8)
【出願人】(591251636)現代自動車株式会社 (1,064)
【Fターム(参考)】
[ Back to top ]