
赤外線追尾装置
【課題】 可及的に追尾精度を高めた赤外線追尾装置を提供することを目的とする。
【解決手段】 赤外線追尾装置(1)は赤外線送信装置(3)と、赤外線受信装置(5)と、駆動装置(7)とにより概ね構成してある。駆動装置は、赤外線受信装置が出力した各信号レベルの比較結果に基づいて各受光素子(55a,55b,55c,55d)の受信方向を変更して赤外線送信装置の発光素子(13)を追尾可能に構成してある。赤外線送信装置が、発光素子から送信する赤外線パルスを、所定レベルから時間経過に伴い段階的に減少させた後、所定レベルに復帰させるまでの周期を繰り返すように構成することによって、減少しない均等レベルの赤外線パルスを用いたならば生じたであろう拡散による追尾精度の低下を有効抑制することができる。この結果、追尾精度を高く保つことが可能になる。
【解決手段】 赤外線追尾装置(1)は赤外線送信装置(3)と、赤外線受信装置(5)と、駆動装置(7)とにより概ね構成してある。駆動装置は、赤外線受信装置が出力した各信号レベルの比較結果に基づいて各受光素子(55a,55b,55c,55d)の受信方向を変更して赤外線送信装置の発光素子(13)を追尾可能に構成してある。赤外線送信装置が、発光素子から送信する赤外線パルスを、所定レベルから時間経過に伴い段階的に減少させた後、所定レベルに復帰させるまでの周期を繰り返すように構成することによって、減少しない均等レベルの赤外線パルスを用いたならば生じたであろう拡散による追尾精度の低下を有効抑制することができる。この結果、追尾精度を高く保つことが可能になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被追尾体である赤外線送信装置から送信される赤外線パルスを受信して被追尾体を追尾可能とする赤外線追尾装置に関するものである。
【背景技術】
【0002】
被検出体(被追尾体)が発光する赤外線を検出する装置として、特許文献1に記載された装置(以下、「従来装置」という)がある。従来装置は、平面状において十字状に配された4個の受光素子を備えていて、移動する被検出体から受ける光のレベルを十字方向に対向する受光素子間で比較し、その強弱に基づいて追尾可能に構成してある。すなわち、受光レベルの高い受光素子は、それが低い受光素子よりも被検出体に近い位置にあるわけであるから、受光レベルの高い受光素子の方向に両受光素子の受信方向を変更させれば、受光レベルの低かった受光素子は被検出体に近づき、その分、受光レベルの高かった受光素子が被検出体から遠のくことになる。両受光素子の受光レベルが等しくなれば、その時点で両受光素子から被検出体までの距離が等しいということになり、このような受光レベルの均等化を図ることによって被検出体を検出できるようになっている。上記原理の下、水平方向に位置する2個の受光素子と垂直方向に位置する2個の受光素子を用いれば、平面上で移動する被検出体を検出することが可能になる。従来装置に代表される赤外線検出装置(赤外線追尾装置)は、たとえば、カラオケの歌い手が持つマイクに発光素子を設けておき、その歌い手を撮影するビデオカメラの追尾装置に受光素子を設けておいて、歌い手が移動してもその移動にビデオカメラが追尾可能とする場合に使用される。
【特許文献1】実開昭61−42169号公報(8〜9頁、第5〜6図)。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来装置が依拠する追尾原理だけでは、追尾精度に難点がある。追尾が受光レベルの均等化により実現することは前述した。他方、光が直進する性質を有していることはよく知られているが、それは理想状態における性質であって、空気中には、水蒸気、塵埃および煙草の煙等が浮遊しており、これらの浮遊物が光を拡散させその直進を妨げる。したがって、理想状態にあるときであれば複数の受光素子の各々が受光した光のレベル(受光レベル)が均等化し得ない場合であっても、空気中であれば複数の受光素子に均等レベルで到達することが起こり得る。つまり、発光素子と各受光素子との間の距離が均等でないにもかかわらず、均等と判断してしまう場合がある。これが、追尾精度を低下させる主要因である。このような追尾精度の低下は、特に受光レベルが高いとき、つまり、発光素子と各受光素子との間の距離が比較的短いときに生じやすい。受光レベルが高いときは、それが拡散させられた光の一部であっても一定レベルを保った状態で受光素子に到達する可能性が高いからである。本発明が解決しようとする課題は、上記した実情を改善するためになされたものであって、赤外線送信装置(被追尾体)が送信する赤外線信号の有効到達距離内において移動する赤外線受信装置との間の距離の遠近にかかわらず可及的に追尾精度を高めた赤外線追尾装置を提供することを目的とする。
【課題を解決するための手段】
【0004】
上記した目的を達成するために発明者は、発光素子と受光素子各々との間の距離(有効到達距離の範囲)が比較的長いときには、比較的短いときに比べて追尾精度の低下が少ない点に着目した。光の照度は光源と計測点間の距離の2乗に反比例するから、光源である発光素子と計測点である受光素子との間の距離が長くなれば長くなるほど照度(受光レベル)が急速に低下する。受光レベルが低い光から拡散した光は、そもそも受光素子各々に到達しないかしても検出されるに足りないレベルであることが多い。したがって、追尾精度に悪影響を与える可能性は少ない。発明者は、この点を積極的に活用することにより、上記目的を達成した。詳細は、項を改めて説明する。
【0005】
(請求項1記載の発明の特徴)
請求項1記載の発明に係る赤外線追尾装置(以下、適宜「請求項1の追尾装置」という)は、被追尾体となる発光素子から赤外線パルスを送信可能な赤外線送信装置と、当該赤外線送信装置が送信する赤外線パルスを、少なくとも2個の受光素子を介して受信可能、かつ、各受光素子が受信した各信号レベルの比較結果を出力可能な赤外線受信装置と、当該受光素子の受信方向を変更させるための駆動装置と、を含めて構成してある。この構成における駆動装置が、当該赤外線受信装置が出力した各信号レベルの比較結果に基づいて当該各受光素子の受信方向を変更させることによって当該赤外線送信装置の発光素子を追尾可能に構成してあり、さらに、当該赤外線送信装置が、当該発光素子から送信する赤外線パルスを、所定レベルから時間経過に伴い段階的に減少させた後、所定レベルに復帰させるまでの周期を繰り返すように構成してある。赤外線パルスには、各信号レベルの比較に直接寄与しないパルスを含めることを妨げない。たとえば、各周期の始期(終期)を赤外線受信装置に認識させるためのスタートパルス(エンドパルス)や、信号送受信のチャンネルを複数設定した場合のチャンネルを識別させるためのチャンネルパルス等を赤外線パルスに含めることができる。直線的追尾を行うのであれば2個の受光素子で足りるが、二次元的追尾を行うのであれば少なくとも3個の受光素子を追尾可能に相対配置するとよい。
【0006】
請求項1の追尾装置によれば、赤外線送信装置が備える発光素子から送信された赤外線パルスが、当該赤外線パルスの有効到達範囲内にある少なくとも2個の受光素子を介して赤外線受信装置によって受信される。赤外線受信装置は、各受信装置が受信した赤外線パルスのレベルを比較して、その比較結果を駆動装置に伝える。駆動装置は、受けた比較結果に基づいて各受光素子の受信方向(受光方向)を変更させて送信装置を追尾させる。このとき、赤外線送信装置が当該発光素子から送信する赤外線パルスは、所定レベルから時間経過に伴い段階的に減少させた後、所定レベルに復帰させるまでの周期を繰り返す。したがって、赤外線受信装置は、当初受信可能であった赤外線パルスが時間経過に伴い受信不能となる場合がある。発光素子と各受光素子との間の距離が近い場合であっても、赤外線パルスの信号レベルを段階的に減少するため遠い場合と同じようにレベル比較が可能になる。したがって、減少しない均等レベルの赤外線パルスを用いたならば生じたであろう拡散による追尾精度の低下を有効抑制することができ、この結果、赤外線受信装置による赤外線送信装置の追尾精度を高く保つことが可能になる。
【0007】
(請求項2記載の発明の特徴)
請求項2記載の発明に係る赤外線追尾装置(以下、適宜「請求項2の追尾装置」という)では、請求項1の追尾装置の基本的構成を備えさせた上で、前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数に基づいて各信号レベルの比較結果を出力可能に構成してある。
【0008】
請求項2の追尾装置によれば、請求項1の追尾装置において、前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数に基づいて各信号レベルの比較結果を出力する。すなわち、赤外線パルスのレベルが段階的に減少するわけであるから、赤外線パルスを受信している赤外線受信装置(受光素子)は、その赤外線パルスを含む1周期内の何れかの地点でその受信が不能状態となる。ここで、各受光素子が何れの段階において受信不能になったかを検出することによって、何れの受光素子が最も発光素子に近いか(発光素子に遠いか)を判断することができる。具体的な検出は、各受光素子が受信不能に至るまでに受信した赤外線パルスの数をカウントすることにより行う。段階的にレベル減少する赤外線パルスをより多く受信できた受光素子のほうが、できなかった受光素子よりも発光素子に近い位置にあるからである。上記判断結果を受けた駆動装置は、受信赤外線パルスの数が多かった受光素子が発光素子から遠のき少なかった受光素子が近づく方向に各受光素子の受光面を変更する。受光面変更は、変更前に多く受信していた受光素子と少なく受信していた受光素子との間の赤外線パルス数が一致するまで行う。受光面の変更方向は、受光素子の数と各受光素子の相対位置により主として求められる。赤外線パルスのカウントは引き続き行い、カウント数に差が生じたら、上記手順によって受光面の変更を再度行う。たとえば、2個の受光素子が設けてある場合に、ある1周期の範囲内において一方と他方の受光素子が赤外線パルスの受信が不能となったときに、当該周期内において一方の受光素子の赤外線パルス数が他方の受光素子のそれより多いとするなら、一方の受光素子のほうが他方の受光素子よりも発光素子に近いという結果を得る。この判断結果を受けた駆動装置は、一方の受光素子と他方の受光素子とを通過する線上において一方の受光素子を発光素子から遠のけ、他方の受光素子を近づける方向に両受光素子の受光面を変更する。受光面の変更は、一方と他方の受光素子が受信する赤外線パルスの数が一致するまで行う。次いで、他方の受光素子の赤外線パルス数が一方のそれよりも多くなったことを検出したら、上記手順で受光面変更を行う。
【0009】
(請求項3記載の発明の特徴)
請求項3記載の発明に係る赤外線追尾装置(以下、適宜「請求項3の追尾装置」という)では、請求項2の追尾装置の基本的構成を備えさせた上で、前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数が一致したとき(追尾完了したとき)に、当該パルス数に基づいて当該各受光素子と前記発光素子との間の距離を算出可能に構成してある。
【0010】
請求項3の追尾装置によれば、請求項2の追尾装置の作用効果に加え、各受光素子と発光素子との間の距離を算出することができる。距離算出は自動追尾には必ずしも必要ではないが、距離算出を可能としておけば追尾装置の応用範囲が広くなる。
【0011】
(請求項4記載の発明の特徴)
請求項4記載の発明に係る赤外線追尾装置(以下、適宜「請求項4の追尾装置」という)では、請求項1乃至3何れかの追尾装置の基本的構成を備えさせた上で、前記受光素子が4個設けてあり、当該4個の受光素子の各々を直交する仮想線上の交点から等距離の位置に設けてある。すなわち、4個の受光素子が、一方と他方の長さが等しい十字状に配してある。
【0012】
請求項4の追尾装置によれば、請求項1乃至3何れかの追尾装置の作用効果に加え、4個の受光素子によって2次元的(平面的)追尾が可能になる。すなわち、たとえば、2個の受光素子を設けた場合は、直線的追尾のみが可能であるが、これら2個の受光素子にこれら2個の受光素子を通過する仮想線と直交する仮想線上に他の2個の受光素子を設けることによって2次元的追尾を実現する。しかも、各受光素子から仮想線交点までの距離を等しく設定してあるので、一方向の制御と他方向の制御を共通化することができる。すなわち、4個の受光素子を水平方向と垂直方向に配したとすると、水平方向の制御プログラムと垂直方向の垂直プログラムとは、共通したものを使用することができる。装置設計の上で極めて便利である。
【0013】
(請求項5記載の発明の特徴)
請求項5記載の発明に係る赤外線追尾装置(以下、適宜「請求項5の追尾装置」という)では、請求項4の追尾装置の基本的構成を備えさせた上で、前記仮想線上の交点から受信方向に向って突出する所定長さの遮蔽突起を設けてある。遮蔽突起は、遮蔽突起を挟んで対向する受光素子同士において、所望距離を隔てて存在する発光素子から送信される赤外線パルスを一方の受光素子で受信可能であるときに、他方の受光素子では受信できないように遮蔽可能に構成する。遮蔽突起の形状は、たとえば、円筒状、四角柱状に構成するとよい。
【0014】
請求項5の追尾装置によれば、請求項4の追尾装置の作用効果に加え、遮蔽突起を挟んで対向する受光素子同士において、所望距離を隔てて存在する発光素子から送信される赤外線パルスを一方の受光素子で受信可能であるときに、他方の受光素子では受信できないように遮蔽可能となる。遮蔽によって、受信できる受光素子と受信できない受光素子を明確に区別することができる。すなわち、上記場合において、遮蔽突起が存在しなければ一方及び他方の受光素子の両者によって赤外線パルスを受信可能となるが、その際に、両受光素子が受信するパルスレベルに大きな差がないとき、すなわち、差が明確でないときは追尾装置が誤動作し易い状況にある。遮蔽突起は、この点を改善することにより追尾精度を高めることに貢献する。
【発明の効果】
【0015】
本発明に係る赤外線追尾装置によれば、赤外線送信装置(被追尾体)が送信する赤外線信号の有効到達距離内において移動する赤外線受信装置との間の距離の遠近にかかわらず可及的に追尾精度を高めることができる。
【発明を実施するための最良の形態】
【0016】
各図に基づいて、本発明の実施の形態について説明する。図1は、赤外線追尾装置の使用例を示す図である。図2は、赤外線送信装置の正面図(a)及び平面図(b)である。図3は、赤外線受信装置の正面図(a)及びY軸サーボユニットの平面図(b)である。図4は、赤外線送信回路を示す図である。図5は、赤外線パルス信号を示す図である。図6は、赤外線受信回路を示す図である。図7は、遮蔽突起の動作原理を示す図である。図8は、赤外線送信回路の動作を示すフローチャートである。図9は、赤外線受信回路の動作を示すフローチャートである。図10は、各受光素子が受信した赤外線パルスを示す図である。図11及び12は、赤外線追尾装置の他の使用例を示す図である。
【0017】
(赤外線追尾装置の概略構造と使用例)
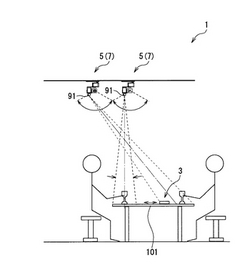
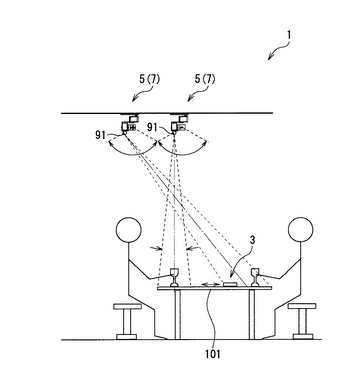
図1乃至3を参照する。赤外線追尾装置1(以下、単に「追尾装置1」と略称する)は、赤外線送信装置3(以下、単に「送信装置3」と略称する)と、赤外線受信装置5(以下、単に「受信装置5」と略称する)と、駆動装置7と、から概ね構成してある。追尾装置1は、たとえば、図1に示すように、送信装置3をテーブル101の上に置き、受信装置5を天井に取り付けて使用することができる。受信装置5には、送信装置3を追尾するライト91を取り付けてあり、これにより、テーブル101の所望箇所に光を照射できるように構成してある。
【0018】
(赤外線送信装置の構成)
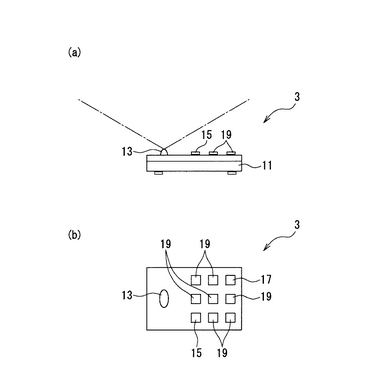
図2に示すように送信装置3は、ケース状の送信装置本体11と、送信装置本体11の上面に設けられた発光素子13、送信開始スイッチ15、送信停止スイッチ17、チャンネル選択スイッチ群19,・・と、これらの電子部品群を含む赤外線送信回路21(図4参照)と、から概ね構成してある。発光素子13は、赤外線パルスを送信するための素子であって、たとえば、赤外LEDが好適である。発光素子13は、被追尾体としての役割を担っている。本実施形態における発光素子13は、送信装置本体11と一体化させてあるが、別体として構成することもできる。つまり、発光素子13を送信装置本体11から分離して両者を有線又は無線で接続する方法もある。この方法によれば、被追尾体としたい装置や部材等にこの発光素子13を取り付け、これらの装置や部材から離れたところから当該発光素子13を制御するように構成することができる。送信開始スイッチ15は赤外線パルスを送信する際の始動スイッチであり、送信停止スイッチ17は同送信を停止する際のスイッチである。送信開始スイッチ15と送信停止スイッチ17は、これらを1個のスイッチにより構成して最初に操作したときに送信を開始し、次の操作により送信を停止するようにしてもよい。チャンネル選択スイッチ19,・・は、送信する赤外線パルスのチャンネルを選択させるためのスイッチであって、複数の追尾装置を同時に使用するような場合に、各々を識別させるためのチャンネル選択である。赤外線送信回路21は、送信装置本体11内に収納してあり、次に述べる構成を備えている。
【0019】
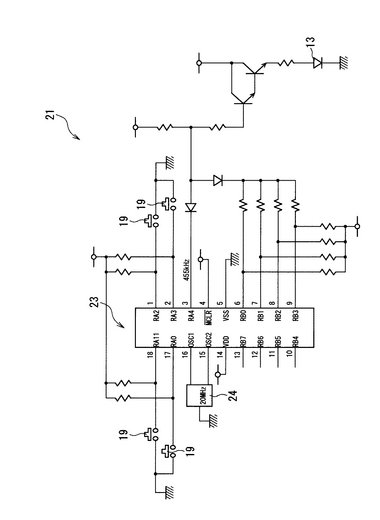
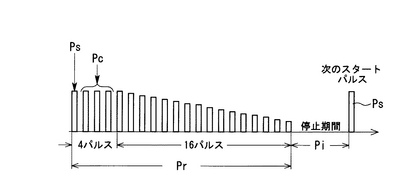
(赤外線送信回路の構成)
図4及び5を参照する。本実施形態では、ワンチップマイコン23に接続したクリスタル24によって20MHzを発振させ、これを分割して3番ピンから455kHz前後のキャリアパルス信号を取り出している。他方、6番から9番のピンから段階的に変化するデジタル電圧を抵抗群を介してアナログ電圧として取り出し、このアナログ電圧と上記455kHzのキャリアパルス信号とのアンドをとることによって、これを振幅変調する。この振幅変調によって、1個のスタートパルスPs、3個のチャンネルパルスPc及び16個の段階的にレベルが減少する調査パルスPrを得る。その後、所定の停止期間Piを介してから次の周期のスタートパルスを立ち上げる。すなわち、スタートパルスPsとチャンネルパルスPcの後に所定レベルから時間経過に伴い段階的に減少する調査パルスPrを送信した後、所定の停止期間Piを介して所定レベルに復帰するまでの周期を繰り返すように構成してある。これらのパルスが発光素子13を点灯させ、赤外線パルスが送信される。なお、本実施形態におけるチャンネルパルスPcの数は3個としてあるが、これは設定しようとするチャンネルを3ビット8チャンネルとしたためである。チャンネル数の増減に応じて、パルス数を適宜増減可能であり、不要であれば省略も可能である。同様にして調査パルスPrの数は16個としたが、追尾精度に悪影響を与えない範囲において適宜増減可能である。
【0020】
(赤外線受信装置の構成)
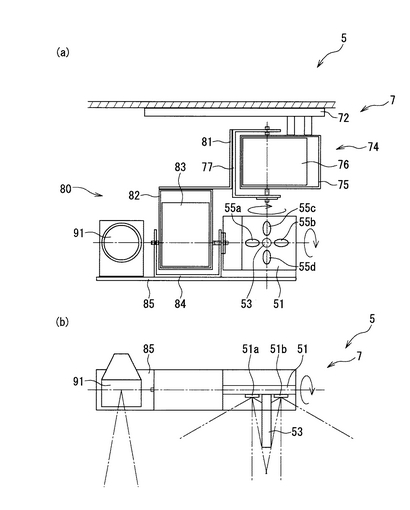
受信装置5は、図3(a)に示すように、略正方形の素子支持板51と、赤外線受信回路57を、その主要部品とする。素子支持板51には、その中心から突き出る円柱状の遮蔽突起53と、遮蔽突起53を囲むようにして十字状に配した4個の受光素子55a,55b,55c及び55dを設けてある。受光素子55aと受光素子55bは水平方向に、受光素子55cと受光素子55dは垂直方向に、それぞれ位置している。遮蔽突起53の突き出る方向は各受光素子55a,55b,55c及び55dの受信方向(被追尾体である発光素子13がある方向)と一致させてある。素子支持板51は、駆動装置7によって支持させてあり、駆動装置7は赤外線受信回路57の指令(後述する比較結果)に基づいて素子支持板51の位置や方向を変更させ、これによって、各受光素子55a,55b,55c及び55dの受信方向を変更可能に構成してある。駆動装置については、後述する。なお、図3に示すライト91は、素子支持板51とともに駆動装置7により位置や方向を変更させられるように構成してあり、これにより、被追尾体に光を照射できるようにしてある。
【0021】
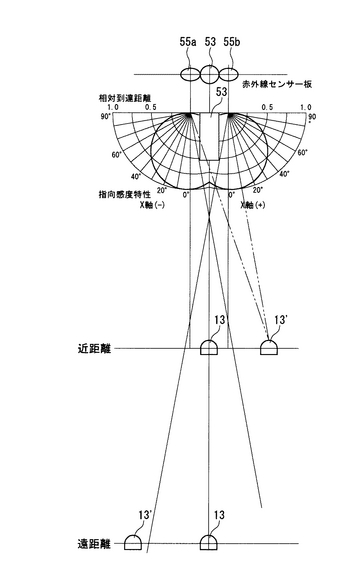
(発光素子の指向性と遮蔽突起)
図7を参照する。図7では、水平方向に位置する受光素子55a,55bと遮蔽突起53との相対位置及び受光素子55a,55bの指向感度特性を示している。指向感度特性は、受光素子の正面、すなわち、0°の方向において最大となり、0°のときの相対到達距離を1としたときのX軸(+)又はX軸(−)方向60°における相対到達距離は0°の時のほぼ半分の0.5となり、同じく90°において同距離がゼロとなる。換言すると、何れの受光素子55a,55bの正面に発光素子がある場合に赤外線パルスを最も効率よく受信することができ、正面から60°傾くと半分の効率にまで低下し、さらに、90°まで傾くと受信不能となる。ここで、発光素子13(13´)と受光素子55a,55bとの距離が近い場合と遠い場合に分けた上で説明を続ける。まず、発光素子13,13´が近距離にある場合である。受光素子55a,55bの正面に(0°)の位置にある発光素子13から送信される赤外線パルスは、受光素子55a,55bによって最も効率よく受信され、両受光素子55a,55bが受信する赤外線パルスのレベルは均等である。他方、発光素子13´は、受光素子55bから見ると略10°の位置にあるが、受光素子55aからは遮蔽突起53が邪魔をして見ることができない。すなわち、発光素子13´が送信する赤外線パルスを、受光素子55bに受信させることはできるが受光素子55aに受信させることはできない。ここで、仮に、遮蔽突起53が存在しないとすると、受光素子55aに対して略−20°の方向にある発光素子13´は、受光素子55aからも見ることができるので、受光素子55bと併せて受光素子55aにも赤外線パルスを受信させることが可能になる。このとき、受光素子55aの相対到達距離は0.75前後であり、受光素子55bのそれは0.95前後である。両者間には0.2(0.95−0.75)の差があるにはあるが、この差は、遮蔽突起53が存在する場合に比べて決して大きいとはいえない。つまり、受光素子55a,55b間の受信レベルの差が明確に生じていないことになる。明確な差がなければ、環境次第では光の拡散によって追尾精度に問題が生じる場合があり得る。遮蔽突起53が存在すれば、このような問題は生じない。これが、遮蔽突起53を設ける理由である。
【0022】
次は、発光素子13,13´が遠距離にある場合である。遠距離にある発光素子13については、受光素子55a,55bの正面にあるので追尾精度の低下はほとんど問題とならない。他方、発光素子13´は、受光素子55bから見ると略−15°の位置にあるが、遮蔽突起53が邪魔をして見ることができない。ここで、仮に、遮蔽突起53が存在しないとすると、受光素子55aに対して略10°の方向にある発光素子13´は、受光素子55bからも見ることができるので、受光素子55aと併せて受光素子55bにも赤外線パルスを受信させることが可能になる。このとき、受光素子55aの相対到達距離は1に限りなく近く、受光素子55bのそれは0.95前後である。両者間には0.05(1.00−0.95)の差があるにはあるが、この差は、遮蔽突起53が存在する場合に比べてないに等しい。つまり、受光素子55a,55b間の受信レベルの差が明確に生じていないことになる。発光素子が遠いところにある場合も、高い追尾精度を保つために遮蔽突起53が極めて有効であることが分かる。なお、上述の説明は、受光素子55a,55bについて説明したが、受光素子55c,55dについても水平方向・垂直方向が異なるだけで機能は同じである。
【0023】
(赤外線受信回路の構成)
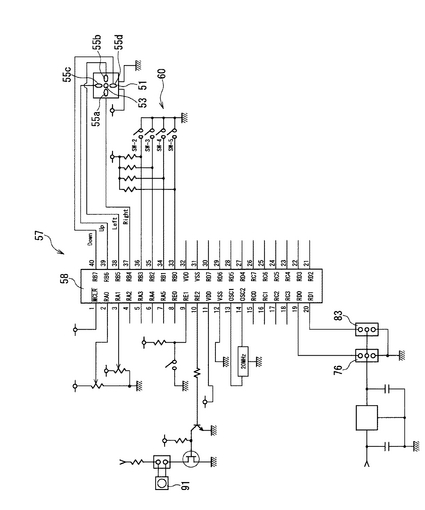
図6を参照する。赤外線受信回路57は、ワンチップマイコン58を主要部品として構成してあり、このワンチップマイコン58に4個の受光素子55a,55b,55c,55d、チャンネル設定スイッチ群60,・・、X軸サーボモータ76、Y軸サーボモータ83及びライト91等を接続してある。
【0024】
(駆動装置の構成)
図3を参照する。駆動装置7は、ベース板72と、X軸サーボユニット74と、Y軸サーボユニット80と、から概ね構成してある。ベース板72は、天井に固定してあり、ベース板72の下面にX軸サーボユニット74を固定してある。X軸サーボユニット74は、固定フレーム75によって支持されたX軸サーボモータ76と、X軸サーボモータ76によってX軸方向(ベース板72に対して水平方向)に回転されるコの字状の回転フレーム77と、を備えている。Y軸サーボユニット80はこの回転フレーム77に固定してある。他方、Y軸サーボユニット80は、L字板81と、L字板81に固定フレーム82を介して支持させたY軸サーボモータ83と、Y軸サーボモータ83によってY軸方向(ベース板72に対して垂直方向)に回転されるコの字状の回転フレーム84と、回転フレーム84に固定した支持板85と、から概ね構成してある。支持板85には、素子支持板51を介した受光素子55a,55b,55c及び55dとライト91とを前者の受信方向と後者の照射方向を一致させた状態で取り付けてある。すなわち、X軸サーボモータ76の回転は、回転フレーム77を介して素子支持板51及びライト91を含むY軸サーボユニット80全体をX軸方向に回転させ、Y軸サーボモータ83の回転は、素子支持板51及びライト91をY軸方向に回転させる。両者の回転が合わさって受信方向と照射方向の2次元的変更が可能になる。X軸サーボモータ76の回転とY軸サーボモータ83の回転は、各々赤外線受信回路57の指令によって行われる。
【0025】
(赤外線送信装置の動作)
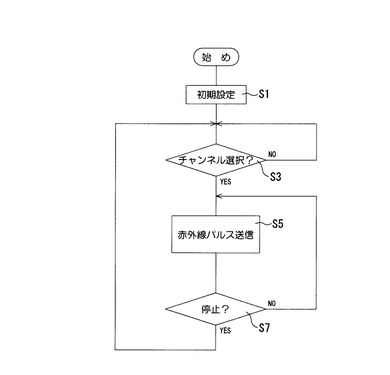
図8を参照する。送信装置3の送信開始スイッチ15(図2参照)が操作されると電源が投入されワンチップマイコン23(図4参照)に格納されたプログラムが駆動して、まず、初期設定を行う(S1)。ここで、送信チャンネルが選択されているかを確認し、設定されている場合は次のS5へ進む。送信チャンネルが選択されていない場合は、選択されるまで待機する(S3)。S5において、図5に示す赤外線パルスを送信する(S5)。赤外線パルスの送信は、送信停止スイッチ17(図2参照)が操作されるまで継続する(S7)。送信停止スイッチ17が操作されると、その操作に係るチャンネルは終了し、次のチャンネルが選択されるのを待つ。次のチャンネルが選択されると、上記同様の手順を、電源が遮断されない限り繰り返す。
【0026】
(赤外線受信装置の動作)
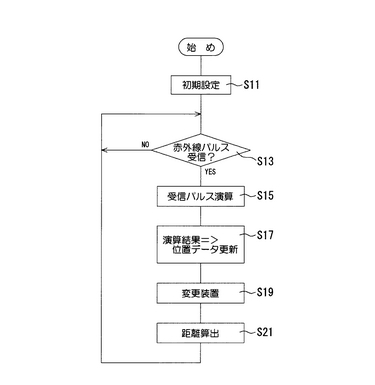
図9を参照する。電源投入によりワンチップマイコン58に格納されたプログラムが駆動して、まず、初期設定を行う(S11)。ここで、赤外線パルスを受信したら、次のS15へ進み、受信しなかったら受信するまで待機する(S13)。S15では、受信した赤外線パルスを基に演算(後述)を行う。演算結果が出たら、位置データを更新するとともに(S17)、駆動装置7へ指令を送りX軸サーボモータ76,Y軸サーボモータ83を回転させて発光素子13を追尾させる(S19)。さらに、必要に応じて、発光素子13(送信装置3)までの距離を受信した赤外線パルスの数を基に算出してもよい(S21)。以上の動作が終了したらS13に戻り、同じ動作を繰り返す。
【0027】
(演算の具体的動作)
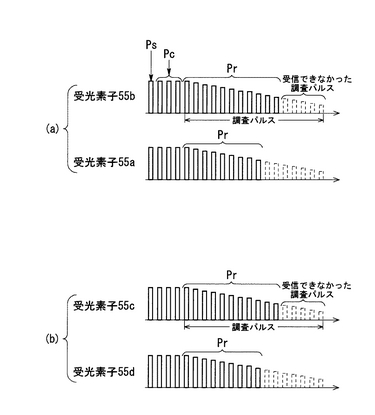
図2、3、7及び10を参照する。まず、赤外線パルスをX軸方向に並ぶ受光素子55a,55bが受信した場合を説明する。図10(a)に示すように、受光素子55b及び受光素子55aが受信した各々の調査パルスPrの数をカウントする。今回は、受光素子55bの受信パルス数が11個であり、受光素子55aの受信パルス数が9個であるから、両者を比較して受光素子55bのほうが受光素子55aよりも2個のパルスを余計に受信したという結果を得る。すなわち、受光素子55aは受光素子55bよりも、発光素子13に対して遠い位置にある。そこで、駆動装置7に指令を送り、X軸サーボモータ76を駆動させて、発光素子13に対して受光素子55aを近づけ受光素子55bを遠のける方向にY軸サーボユニット80を回転(傾動)させる(図3参照)。次に、Y軸方向に並ぶ受光素子55c,55dが受信した場合を説明する。図10(b)に示すように、受光素子55c及び受光素子55dが受信した各々の調査パルスPrの数をカウントする。今回は、受光素子55cの受信パルス数が11個であり、受光素子55dの受信パルス数が9個であるから、両者を比較して受光素子55cのほうが受光素子55dよりも2個のパルスを余計に受信したという結果を得る。すなわち、受光素子55cは受光素子55dよりも、発光素子13に対して近い位置にある。そこで、駆動装置7に指令を送り、Y軸サーボモータ83を駆動させて、発光素子13に対して受光素子55cを遠のけ受光素子55dを近づける方向に素子支持板51及びライト91を回転(傾動)させる(図3参照)。
【0028】
上記したX軸サーボモータ76の回転とY軸サーボモータ83の回転は、時間的に誤差があるわけではなく、両者がほぼ同時に行われる。すなわち、X軸サーボモータ76の回転は、Y軸サーボモータ83を含めたY軸サーボユニット80全体を回転させ、その回転するY軸サーボユニット80の中でY軸サーボモータ83が回転する。その結果、素子支持板51(受光素子55a,55b,55c,55d)の受信方向が2次元的に変更されるのである。上記両モータの回転は、受光素子55a,55b,55c,55dが受信する赤外線パルス(調査パルス)の数が一致するまで行われ(すなわち、受信面の変更が行われ)、一致したときに追尾完了となる。追尾完了したときに、受光素子55a,55b,55c,55dのうち何れかが受信した赤外線パルスの数とパルス数に基づいて予め算出してある発光素子までの距離とを比較することによって、追尾完了したときの各受光素子55a,55b,55c,55dと発光素子13との間の距離を算出することができる。
【0029】
(赤外線追尾装置の他の使用例)
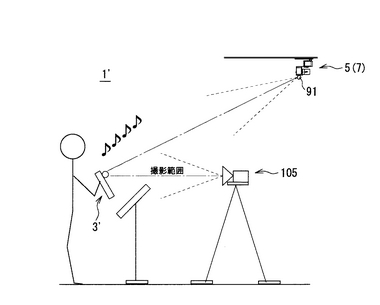
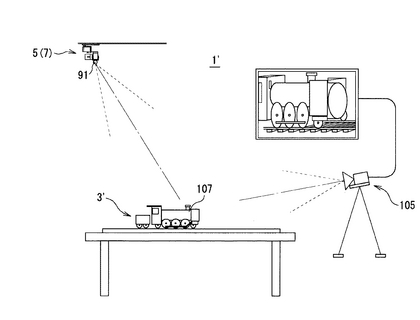
図11に示す他の使用例は、カラオケに用いた追尾装置である。すなわち、追尾装置1´を構成する送信装置3´をカラオケ用マイクに組み込み、ビデオカメラ105で撮影する歌い手を照明するためのライト91を備えた受信装置5を天井に取り付けてある。また、図12に示す他の使用例は、展示物照明用に用いた追尾装置である。すなわち、展示物107に送信装置3´を組み込み、この展示物107をビデオカメラ105で撮影するためにライト91を備えた受信装置5を天井に取り付けてある。
【図面の簡単な説明】
【0030】
【図1】赤外線追尾装置の使用例を示す図である。
【図2】赤外線送信装置の正面図(a)及び平面図(b)である。
【図3】赤外線受信装置の正面図(a)及びY軸サーボユニットの平面図(b)である。
【図4】赤外線送信回路を示す図である。
【図5】赤外線パルス信号を示す図である。
【図6】赤外線受信回路を示す図である。
【図7】遮蔽突起の動作原理を示す図である。
【図8】赤外線送信回路の動作を示すフローチャートである。
【図9】赤外線受信回路の動作を示すフローチャートである。
【図10】各受光素子が受信した赤外線パルスを示す図である。
【図11】赤外線追尾装置の他の使用例を示す図である。
【図12】赤外線追尾装置の他の使用例を示す図である。
【符号の説明】
【0031】
1 赤外線追尾装置
3 赤外線送信装置
5 赤外線受信装置
7 駆動装置
11 送信装置本体
13,13´ 発光素子
15 送信開始スイッチ
17 送信停止スイッチ
19 チャンネル選択スイッチ群
21 赤外線送信回路
23 ワンチップマイコン
24 クリスタル
51 素子支持板
53 遮蔽突起
55a,55b,55c,55d 受光素子
57 赤外線受信回路
58 ワンチップマイコン
60 チャンネル設定スイッチ群
72 ベース板
74 X軸サーボユニット
75 固定フレーム
76 X軸サーボモータ
77 回転フレーム
80 Y軸サーボユニット
81 L字板
82 固定フレーム
83 Y軸サーボモータ
84 回転フレーム
85 支持板
91 ライト
101 テーブル
105 ビデオカメラ
107 展示物
Pc チャンネルパルス
Pi 停止期間
Pr 調査パルス
Ps スタートパルス
【技術分野】
【0001】
本発明は、被追尾体である赤外線送信装置から送信される赤外線パルスを受信して被追尾体を追尾可能とする赤外線追尾装置に関するものである。
【背景技術】
【0002】
被検出体(被追尾体)が発光する赤外線を検出する装置として、特許文献1に記載された装置(以下、「従来装置」という)がある。従来装置は、平面状において十字状に配された4個の受光素子を備えていて、移動する被検出体から受ける光のレベルを十字方向に対向する受光素子間で比較し、その強弱に基づいて追尾可能に構成してある。すなわち、受光レベルの高い受光素子は、それが低い受光素子よりも被検出体に近い位置にあるわけであるから、受光レベルの高い受光素子の方向に両受光素子の受信方向を変更させれば、受光レベルの低かった受光素子は被検出体に近づき、その分、受光レベルの高かった受光素子が被検出体から遠のくことになる。両受光素子の受光レベルが等しくなれば、その時点で両受光素子から被検出体までの距離が等しいということになり、このような受光レベルの均等化を図ることによって被検出体を検出できるようになっている。上記原理の下、水平方向に位置する2個の受光素子と垂直方向に位置する2個の受光素子を用いれば、平面上で移動する被検出体を検出することが可能になる。従来装置に代表される赤外線検出装置(赤外線追尾装置)は、たとえば、カラオケの歌い手が持つマイクに発光素子を設けておき、その歌い手を撮影するビデオカメラの追尾装置に受光素子を設けておいて、歌い手が移動してもその移動にビデオカメラが追尾可能とする場合に使用される。
【特許文献1】実開昭61−42169号公報(8〜9頁、第5〜6図)。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来装置が依拠する追尾原理だけでは、追尾精度に難点がある。追尾が受光レベルの均等化により実現することは前述した。他方、光が直進する性質を有していることはよく知られているが、それは理想状態における性質であって、空気中には、水蒸気、塵埃および煙草の煙等が浮遊しており、これらの浮遊物が光を拡散させその直進を妨げる。したがって、理想状態にあるときであれば複数の受光素子の各々が受光した光のレベル(受光レベル)が均等化し得ない場合であっても、空気中であれば複数の受光素子に均等レベルで到達することが起こり得る。つまり、発光素子と各受光素子との間の距離が均等でないにもかかわらず、均等と判断してしまう場合がある。これが、追尾精度を低下させる主要因である。このような追尾精度の低下は、特に受光レベルが高いとき、つまり、発光素子と各受光素子との間の距離が比較的短いときに生じやすい。受光レベルが高いときは、それが拡散させられた光の一部であっても一定レベルを保った状態で受光素子に到達する可能性が高いからである。本発明が解決しようとする課題は、上記した実情を改善するためになされたものであって、赤外線送信装置(被追尾体)が送信する赤外線信号の有効到達距離内において移動する赤外線受信装置との間の距離の遠近にかかわらず可及的に追尾精度を高めた赤外線追尾装置を提供することを目的とする。
【課題を解決するための手段】
【0004】
上記した目的を達成するために発明者は、発光素子と受光素子各々との間の距離(有効到達距離の範囲)が比較的長いときには、比較的短いときに比べて追尾精度の低下が少ない点に着目した。光の照度は光源と計測点間の距離の2乗に反比例するから、光源である発光素子と計測点である受光素子との間の距離が長くなれば長くなるほど照度(受光レベル)が急速に低下する。受光レベルが低い光から拡散した光は、そもそも受光素子各々に到達しないかしても検出されるに足りないレベルであることが多い。したがって、追尾精度に悪影響を与える可能性は少ない。発明者は、この点を積極的に活用することにより、上記目的を達成した。詳細は、項を改めて説明する。
【0005】
(請求項1記載の発明の特徴)
請求項1記載の発明に係る赤外線追尾装置(以下、適宜「請求項1の追尾装置」という)は、被追尾体となる発光素子から赤外線パルスを送信可能な赤外線送信装置と、当該赤外線送信装置が送信する赤外線パルスを、少なくとも2個の受光素子を介して受信可能、かつ、各受光素子が受信した各信号レベルの比較結果を出力可能な赤外線受信装置と、当該受光素子の受信方向を変更させるための駆動装置と、を含めて構成してある。この構成における駆動装置が、当該赤外線受信装置が出力した各信号レベルの比較結果に基づいて当該各受光素子の受信方向を変更させることによって当該赤外線送信装置の発光素子を追尾可能に構成してあり、さらに、当該赤外線送信装置が、当該発光素子から送信する赤外線パルスを、所定レベルから時間経過に伴い段階的に減少させた後、所定レベルに復帰させるまでの周期を繰り返すように構成してある。赤外線パルスには、各信号レベルの比較に直接寄与しないパルスを含めることを妨げない。たとえば、各周期の始期(終期)を赤外線受信装置に認識させるためのスタートパルス(エンドパルス)や、信号送受信のチャンネルを複数設定した場合のチャンネルを識別させるためのチャンネルパルス等を赤外線パルスに含めることができる。直線的追尾を行うのであれば2個の受光素子で足りるが、二次元的追尾を行うのであれば少なくとも3個の受光素子を追尾可能に相対配置するとよい。
【0006】
請求項1の追尾装置によれば、赤外線送信装置が備える発光素子から送信された赤外線パルスが、当該赤外線パルスの有効到達範囲内にある少なくとも2個の受光素子を介して赤外線受信装置によって受信される。赤外線受信装置は、各受信装置が受信した赤外線パルスのレベルを比較して、その比較結果を駆動装置に伝える。駆動装置は、受けた比較結果に基づいて各受光素子の受信方向(受光方向)を変更させて送信装置を追尾させる。このとき、赤外線送信装置が当該発光素子から送信する赤外線パルスは、所定レベルから時間経過に伴い段階的に減少させた後、所定レベルに復帰させるまでの周期を繰り返す。したがって、赤外線受信装置は、当初受信可能であった赤外線パルスが時間経過に伴い受信不能となる場合がある。発光素子と各受光素子との間の距離が近い場合であっても、赤外線パルスの信号レベルを段階的に減少するため遠い場合と同じようにレベル比較が可能になる。したがって、減少しない均等レベルの赤外線パルスを用いたならば生じたであろう拡散による追尾精度の低下を有効抑制することができ、この結果、赤外線受信装置による赤外線送信装置の追尾精度を高く保つことが可能になる。
【0007】
(請求項2記載の発明の特徴)
請求項2記載の発明に係る赤外線追尾装置(以下、適宜「請求項2の追尾装置」という)では、請求項1の追尾装置の基本的構成を備えさせた上で、前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数に基づいて各信号レベルの比較結果を出力可能に構成してある。
【0008】
請求項2の追尾装置によれば、請求項1の追尾装置において、前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数に基づいて各信号レベルの比較結果を出力する。すなわち、赤外線パルスのレベルが段階的に減少するわけであるから、赤外線パルスを受信している赤外線受信装置(受光素子)は、その赤外線パルスを含む1周期内の何れかの地点でその受信が不能状態となる。ここで、各受光素子が何れの段階において受信不能になったかを検出することによって、何れの受光素子が最も発光素子に近いか(発光素子に遠いか)を判断することができる。具体的な検出は、各受光素子が受信不能に至るまでに受信した赤外線パルスの数をカウントすることにより行う。段階的にレベル減少する赤外線パルスをより多く受信できた受光素子のほうが、できなかった受光素子よりも発光素子に近い位置にあるからである。上記判断結果を受けた駆動装置は、受信赤外線パルスの数が多かった受光素子が発光素子から遠のき少なかった受光素子が近づく方向に各受光素子の受光面を変更する。受光面変更は、変更前に多く受信していた受光素子と少なく受信していた受光素子との間の赤外線パルス数が一致するまで行う。受光面の変更方向は、受光素子の数と各受光素子の相対位置により主として求められる。赤外線パルスのカウントは引き続き行い、カウント数に差が生じたら、上記手順によって受光面の変更を再度行う。たとえば、2個の受光素子が設けてある場合に、ある1周期の範囲内において一方と他方の受光素子が赤外線パルスの受信が不能となったときに、当該周期内において一方の受光素子の赤外線パルス数が他方の受光素子のそれより多いとするなら、一方の受光素子のほうが他方の受光素子よりも発光素子に近いという結果を得る。この判断結果を受けた駆動装置は、一方の受光素子と他方の受光素子とを通過する線上において一方の受光素子を発光素子から遠のけ、他方の受光素子を近づける方向に両受光素子の受光面を変更する。受光面の変更は、一方と他方の受光素子が受信する赤外線パルスの数が一致するまで行う。次いで、他方の受光素子の赤外線パルス数が一方のそれよりも多くなったことを検出したら、上記手順で受光面変更を行う。
【0009】
(請求項3記載の発明の特徴)
請求項3記載の発明に係る赤外線追尾装置(以下、適宜「請求項3の追尾装置」という)では、請求項2の追尾装置の基本的構成を備えさせた上で、前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数が一致したとき(追尾完了したとき)に、当該パルス数に基づいて当該各受光素子と前記発光素子との間の距離を算出可能に構成してある。
【0010】
請求項3の追尾装置によれば、請求項2の追尾装置の作用効果に加え、各受光素子と発光素子との間の距離を算出することができる。距離算出は自動追尾には必ずしも必要ではないが、距離算出を可能としておけば追尾装置の応用範囲が広くなる。
【0011】
(請求項4記載の発明の特徴)
請求項4記載の発明に係る赤外線追尾装置(以下、適宜「請求項4の追尾装置」という)では、請求項1乃至3何れかの追尾装置の基本的構成を備えさせた上で、前記受光素子が4個設けてあり、当該4個の受光素子の各々を直交する仮想線上の交点から等距離の位置に設けてある。すなわち、4個の受光素子が、一方と他方の長さが等しい十字状に配してある。
【0012】
請求項4の追尾装置によれば、請求項1乃至3何れかの追尾装置の作用効果に加え、4個の受光素子によって2次元的(平面的)追尾が可能になる。すなわち、たとえば、2個の受光素子を設けた場合は、直線的追尾のみが可能であるが、これら2個の受光素子にこれら2個の受光素子を通過する仮想線と直交する仮想線上に他の2個の受光素子を設けることによって2次元的追尾を実現する。しかも、各受光素子から仮想線交点までの距離を等しく設定してあるので、一方向の制御と他方向の制御を共通化することができる。すなわち、4個の受光素子を水平方向と垂直方向に配したとすると、水平方向の制御プログラムと垂直方向の垂直プログラムとは、共通したものを使用することができる。装置設計の上で極めて便利である。
【0013】
(請求項5記載の発明の特徴)
請求項5記載の発明に係る赤外線追尾装置(以下、適宜「請求項5の追尾装置」という)では、請求項4の追尾装置の基本的構成を備えさせた上で、前記仮想線上の交点から受信方向に向って突出する所定長さの遮蔽突起を設けてある。遮蔽突起は、遮蔽突起を挟んで対向する受光素子同士において、所望距離を隔てて存在する発光素子から送信される赤外線パルスを一方の受光素子で受信可能であるときに、他方の受光素子では受信できないように遮蔽可能に構成する。遮蔽突起の形状は、たとえば、円筒状、四角柱状に構成するとよい。
【0014】
請求項5の追尾装置によれば、請求項4の追尾装置の作用効果に加え、遮蔽突起を挟んで対向する受光素子同士において、所望距離を隔てて存在する発光素子から送信される赤外線パルスを一方の受光素子で受信可能であるときに、他方の受光素子では受信できないように遮蔽可能となる。遮蔽によって、受信できる受光素子と受信できない受光素子を明確に区別することができる。すなわち、上記場合において、遮蔽突起が存在しなければ一方及び他方の受光素子の両者によって赤外線パルスを受信可能となるが、その際に、両受光素子が受信するパルスレベルに大きな差がないとき、すなわち、差が明確でないときは追尾装置が誤動作し易い状況にある。遮蔽突起は、この点を改善することにより追尾精度を高めることに貢献する。
【発明の効果】
【0015】
本発明に係る赤外線追尾装置によれば、赤外線送信装置(被追尾体)が送信する赤外線信号の有効到達距離内において移動する赤外線受信装置との間の距離の遠近にかかわらず可及的に追尾精度を高めることができる。
【発明を実施するための最良の形態】
【0016】
各図に基づいて、本発明の実施の形態について説明する。図1は、赤外線追尾装置の使用例を示す図である。図2は、赤外線送信装置の正面図(a)及び平面図(b)である。図3は、赤外線受信装置の正面図(a)及びY軸サーボユニットの平面図(b)である。図4は、赤外線送信回路を示す図である。図5は、赤外線パルス信号を示す図である。図6は、赤外線受信回路を示す図である。図7は、遮蔽突起の動作原理を示す図である。図8は、赤外線送信回路の動作を示すフローチャートである。図9は、赤外線受信回路の動作を示すフローチャートである。図10は、各受光素子が受信した赤外線パルスを示す図である。図11及び12は、赤外線追尾装置の他の使用例を示す図である。
【0017】
(赤外線追尾装置の概略構造と使用例)
図1乃至3を参照する。赤外線追尾装置1(以下、単に「追尾装置1」と略称する)は、赤外線送信装置3(以下、単に「送信装置3」と略称する)と、赤外線受信装置5(以下、単に「受信装置5」と略称する)と、駆動装置7と、から概ね構成してある。追尾装置1は、たとえば、図1に示すように、送信装置3をテーブル101の上に置き、受信装置5を天井に取り付けて使用することができる。受信装置5には、送信装置3を追尾するライト91を取り付けてあり、これにより、テーブル101の所望箇所に光を照射できるように構成してある。
【0018】
(赤外線送信装置の構成)
図2に示すように送信装置3は、ケース状の送信装置本体11と、送信装置本体11の上面に設けられた発光素子13、送信開始スイッチ15、送信停止スイッチ17、チャンネル選択スイッチ群19,・・と、これらの電子部品群を含む赤外線送信回路21(図4参照)と、から概ね構成してある。発光素子13は、赤外線パルスを送信するための素子であって、たとえば、赤外LEDが好適である。発光素子13は、被追尾体としての役割を担っている。本実施形態における発光素子13は、送信装置本体11と一体化させてあるが、別体として構成することもできる。つまり、発光素子13を送信装置本体11から分離して両者を有線又は無線で接続する方法もある。この方法によれば、被追尾体としたい装置や部材等にこの発光素子13を取り付け、これらの装置や部材から離れたところから当該発光素子13を制御するように構成することができる。送信開始スイッチ15は赤外線パルスを送信する際の始動スイッチであり、送信停止スイッチ17は同送信を停止する際のスイッチである。送信開始スイッチ15と送信停止スイッチ17は、これらを1個のスイッチにより構成して最初に操作したときに送信を開始し、次の操作により送信を停止するようにしてもよい。チャンネル選択スイッチ19,・・は、送信する赤外線パルスのチャンネルを選択させるためのスイッチであって、複数の追尾装置を同時に使用するような場合に、各々を識別させるためのチャンネル選択である。赤外線送信回路21は、送信装置本体11内に収納してあり、次に述べる構成を備えている。
【0019】
(赤外線送信回路の構成)
図4及び5を参照する。本実施形態では、ワンチップマイコン23に接続したクリスタル24によって20MHzを発振させ、これを分割して3番ピンから455kHz前後のキャリアパルス信号を取り出している。他方、6番から9番のピンから段階的に変化するデジタル電圧を抵抗群を介してアナログ電圧として取り出し、このアナログ電圧と上記455kHzのキャリアパルス信号とのアンドをとることによって、これを振幅変調する。この振幅変調によって、1個のスタートパルスPs、3個のチャンネルパルスPc及び16個の段階的にレベルが減少する調査パルスPrを得る。その後、所定の停止期間Piを介してから次の周期のスタートパルスを立ち上げる。すなわち、スタートパルスPsとチャンネルパルスPcの後に所定レベルから時間経過に伴い段階的に減少する調査パルスPrを送信した後、所定の停止期間Piを介して所定レベルに復帰するまでの周期を繰り返すように構成してある。これらのパルスが発光素子13を点灯させ、赤外線パルスが送信される。なお、本実施形態におけるチャンネルパルスPcの数は3個としてあるが、これは設定しようとするチャンネルを3ビット8チャンネルとしたためである。チャンネル数の増減に応じて、パルス数を適宜増減可能であり、不要であれば省略も可能である。同様にして調査パルスPrの数は16個としたが、追尾精度に悪影響を与えない範囲において適宜増減可能である。
【0020】
(赤外線受信装置の構成)
受信装置5は、図3(a)に示すように、略正方形の素子支持板51と、赤外線受信回路57を、その主要部品とする。素子支持板51には、その中心から突き出る円柱状の遮蔽突起53と、遮蔽突起53を囲むようにして十字状に配した4個の受光素子55a,55b,55c及び55dを設けてある。受光素子55aと受光素子55bは水平方向に、受光素子55cと受光素子55dは垂直方向に、それぞれ位置している。遮蔽突起53の突き出る方向は各受光素子55a,55b,55c及び55dの受信方向(被追尾体である発光素子13がある方向)と一致させてある。素子支持板51は、駆動装置7によって支持させてあり、駆動装置7は赤外線受信回路57の指令(後述する比較結果)に基づいて素子支持板51の位置や方向を変更させ、これによって、各受光素子55a,55b,55c及び55dの受信方向を変更可能に構成してある。駆動装置については、後述する。なお、図3に示すライト91は、素子支持板51とともに駆動装置7により位置や方向を変更させられるように構成してあり、これにより、被追尾体に光を照射できるようにしてある。
【0021】
(発光素子の指向性と遮蔽突起)
図7を参照する。図7では、水平方向に位置する受光素子55a,55bと遮蔽突起53との相対位置及び受光素子55a,55bの指向感度特性を示している。指向感度特性は、受光素子の正面、すなわち、0°の方向において最大となり、0°のときの相対到達距離を1としたときのX軸(+)又はX軸(−)方向60°における相対到達距離は0°の時のほぼ半分の0.5となり、同じく90°において同距離がゼロとなる。換言すると、何れの受光素子55a,55bの正面に発光素子がある場合に赤外線パルスを最も効率よく受信することができ、正面から60°傾くと半分の効率にまで低下し、さらに、90°まで傾くと受信不能となる。ここで、発光素子13(13´)と受光素子55a,55bとの距離が近い場合と遠い場合に分けた上で説明を続ける。まず、発光素子13,13´が近距離にある場合である。受光素子55a,55bの正面に(0°)の位置にある発光素子13から送信される赤外線パルスは、受光素子55a,55bによって最も効率よく受信され、両受光素子55a,55bが受信する赤外線パルスのレベルは均等である。他方、発光素子13´は、受光素子55bから見ると略10°の位置にあるが、受光素子55aからは遮蔽突起53が邪魔をして見ることができない。すなわち、発光素子13´が送信する赤外線パルスを、受光素子55bに受信させることはできるが受光素子55aに受信させることはできない。ここで、仮に、遮蔽突起53が存在しないとすると、受光素子55aに対して略−20°の方向にある発光素子13´は、受光素子55aからも見ることができるので、受光素子55bと併せて受光素子55aにも赤外線パルスを受信させることが可能になる。このとき、受光素子55aの相対到達距離は0.75前後であり、受光素子55bのそれは0.95前後である。両者間には0.2(0.95−0.75)の差があるにはあるが、この差は、遮蔽突起53が存在する場合に比べて決して大きいとはいえない。つまり、受光素子55a,55b間の受信レベルの差が明確に生じていないことになる。明確な差がなければ、環境次第では光の拡散によって追尾精度に問題が生じる場合があり得る。遮蔽突起53が存在すれば、このような問題は生じない。これが、遮蔽突起53を設ける理由である。
【0022】
次は、発光素子13,13´が遠距離にある場合である。遠距離にある発光素子13については、受光素子55a,55bの正面にあるので追尾精度の低下はほとんど問題とならない。他方、発光素子13´は、受光素子55bから見ると略−15°の位置にあるが、遮蔽突起53が邪魔をして見ることができない。ここで、仮に、遮蔽突起53が存在しないとすると、受光素子55aに対して略10°の方向にある発光素子13´は、受光素子55bからも見ることができるので、受光素子55aと併せて受光素子55bにも赤外線パルスを受信させることが可能になる。このとき、受光素子55aの相対到達距離は1に限りなく近く、受光素子55bのそれは0.95前後である。両者間には0.05(1.00−0.95)の差があるにはあるが、この差は、遮蔽突起53が存在する場合に比べてないに等しい。つまり、受光素子55a,55b間の受信レベルの差が明確に生じていないことになる。発光素子が遠いところにある場合も、高い追尾精度を保つために遮蔽突起53が極めて有効であることが分かる。なお、上述の説明は、受光素子55a,55bについて説明したが、受光素子55c,55dについても水平方向・垂直方向が異なるだけで機能は同じである。
【0023】
(赤外線受信回路の構成)
図6を参照する。赤外線受信回路57は、ワンチップマイコン58を主要部品として構成してあり、このワンチップマイコン58に4個の受光素子55a,55b,55c,55d、チャンネル設定スイッチ群60,・・、X軸サーボモータ76、Y軸サーボモータ83及びライト91等を接続してある。
【0024】
(駆動装置の構成)
図3を参照する。駆動装置7は、ベース板72と、X軸サーボユニット74と、Y軸サーボユニット80と、から概ね構成してある。ベース板72は、天井に固定してあり、ベース板72の下面にX軸サーボユニット74を固定してある。X軸サーボユニット74は、固定フレーム75によって支持されたX軸サーボモータ76と、X軸サーボモータ76によってX軸方向(ベース板72に対して水平方向)に回転されるコの字状の回転フレーム77と、を備えている。Y軸サーボユニット80はこの回転フレーム77に固定してある。他方、Y軸サーボユニット80は、L字板81と、L字板81に固定フレーム82を介して支持させたY軸サーボモータ83と、Y軸サーボモータ83によってY軸方向(ベース板72に対して垂直方向)に回転されるコの字状の回転フレーム84と、回転フレーム84に固定した支持板85と、から概ね構成してある。支持板85には、素子支持板51を介した受光素子55a,55b,55c及び55dとライト91とを前者の受信方向と後者の照射方向を一致させた状態で取り付けてある。すなわち、X軸サーボモータ76の回転は、回転フレーム77を介して素子支持板51及びライト91を含むY軸サーボユニット80全体をX軸方向に回転させ、Y軸サーボモータ83の回転は、素子支持板51及びライト91をY軸方向に回転させる。両者の回転が合わさって受信方向と照射方向の2次元的変更が可能になる。X軸サーボモータ76の回転とY軸サーボモータ83の回転は、各々赤外線受信回路57の指令によって行われる。
【0025】
(赤外線送信装置の動作)
図8を参照する。送信装置3の送信開始スイッチ15(図2参照)が操作されると電源が投入されワンチップマイコン23(図4参照)に格納されたプログラムが駆動して、まず、初期設定を行う(S1)。ここで、送信チャンネルが選択されているかを確認し、設定されている場合は次のS5へ進む。送信チャンネルが選択されていない場合は、選択されるまで待機する(S3)。S5において、図5に示す赤外線パルスを送信する(S5)。赤外線パルスの送信は、送信停止スイッチ17(図2参照)が操作されるまで継続する(S7)。送信停止スイッチ17が操作されると、その操作に係るチャンネルは終了し、次のチャンネルが選択されるのを待つ。次のチャンネルが選択されると、上記同様の手順を、電源が遮断されない限り繰り返す。
【0026】
(赤外線受信装置の動作)
図9を参照する。電源投入によりワンチップマイコン58に格納されたプログラムが駆動して、まず、初期設定を行う(S11)。ここで、赤外線パルスを受信したら、次のS15へ進み、受信しなかったら受信するまで待機する(S13)。S15では、受信した赤外線パルスを基に演算(後述)を行う。演算結果が出たら、位置データを更新するとともに(S17)、駆動装置7へ指令を送りX軸サーボモータ76,Y軸サーボモータ83を回転させて発光素子13を追尾させる(S19)。さらに、必要に応じて、発光素子13(送信装置3)までの距離を受信した赤外線パルスの数を基に算出してもよい(S21)。以上の動作が終了したらS13に戻り、同じ動作を繰り返す。
【0027】
(演算の具体的動作)
図2、3、7及び10を参照する。まず、赤外線パルスをX軸方向に並ぶ受光素子55a,55bが受信した場合を説明する。図10(a)に示すように、受光素子55b及び受光素子55aが受信した各々の調査パルスPrの数をカウントする。今回は、受光素子55bの受信パルス数が11個であり、受光素子55aの受信パルス数が9個であるから、両者を比較して受光素子55bのほうが受光素子55aよりも2個のパルスを余計に受信したという結果を得る。すなわち、受光素子55aは受光素子55bよりも、発光素子13に対して遠い位置にある。そこで、駆動装置7に指令を送り、X軸サーボモータ76を駆動させて、発光素子13に対して受光素子55aを近づけ受光素子55bを遠のける方向にY軸サーボユニット80を回転(傾動)させる(図3参照)。次に、Y軸方向に並ぶ受光素子55c,55dが受信した場合を説明する。図10(b)に示すように、受光素子55c及び受光素子55dが受信した各々の調査パルスPrの数をカウントする。今回は、受光素子55cの受信パルス数が11個であり、受光素子55dの受信パルス数が9個であるから、両者を比較して受光素子55cのほうが受光素子55dよりも2個のパルスを余計に受信したという結果を得る。すなわち、受光素子55cは受光素子55dよりも、発光素子13に対して近い位置にある。そこで、駆動装置7に指令を送り、Y軸サーボモータ83を駆動させて、発光素子13に対して受光素子55cを遠のけ受光素子55dを近づける方向に素子支持板51及びライト91を回転(傾動)させる(図3参照)。
【0028】
上記したX軸サーボモータ76の回転とY軸サーボモータ83の回転は、時間的に誤差があるわけではなく、両者がほぼ同時に行われる。すなわち、X軸サーボモータ76の回転は、Y軸サーボモータ83を含めたY軸サーボユニット80全体を回転させ、その回転するY軸サーボユニット80の中でY軸サーボモータ83が回転する。その結果、素子支持板51(受光素子55a,55b,55c,55d)の受信方向が2次元的に変更されるのである。上記両モータの回転は、受光素子55a,55b,55c,55dが受信する赤外線パルス(調査パルス)の数が一致するまで行われ(すなわち、受信面の変更が行われ)、一致したときに追尾完了となる。追尾完了したときに、受光素子55a,55b,55c,55dのうち何れかが受信した赤外線パルスの数とパルス数に基づいて予め算出してある発光素子までの距離とを比較することによって、追尾完了したときの各受光素子55a,55b,55c,55dと発光素子13との間の距離を算出することができる。
【0029】
(赤外線追尾装置の他の使用例)
図11に示す他の使用例は、カラオケに用いた追尾装置である。すなわち、追尾装置1´を構成する送信装置3´をカラオケ用マイクに組み込み、ビデオカメラ105で撮影する歌い手を照明するためのライト91を備えた受信装置5を天井に取り付けてある。また、図12に示す他の使用例は、展示物照明用に用いた追尾装置である。すなわち、展示物107に送信装置3´を組み込み、この展示物107をビデオカメラ105で撮影するためにライト91を備えた受信装置5を天井に取り付けてある。
【図面の簡単な説明】
【0030】
【図1】赤外線追尾装置の使用例を示す図である。
【図2】赤外線送信装置の正面図(a)及び平面図(b)である。
【図3】赤外線受信装置の正面図(a)及びY軸サーボユニットの平面図(b)である。
【図4】赤外線送信回路を示す図である。
【図5】赤外線パルス信号を示す図である。
【図6】赤外線受信回路を示す図である。
【図7】遮蔽突起の動作原理を示す図である。
【図8】赤外線送信回路の動作を示すフローチャートである。
【図9】赤外線受信回路の動作を示すフローチャートである。
【図10】各受光素子が受信した赤外線パルスを示す図である。
【図11】赤外線追尾装置の他の使用例を示す図である。
【図12】赤外線追尾装置の他の使用例を示す図である。
【符号の説明】
【0031】
1 赤外線追尾装置
3 赤外線送信装置
5 赤外線受信装置
7 駆動装置
11 送信装置本体
13,13´ 発光素子
15 送信開始スイッチ
17 送信停止スイッチ
19 チャンネル選択スイッチ群
21 赤外線送信回路
23 ワンチップマイコン
24 クリスタル
51 素子支持板
53 遮蔽突起
55a,55b,55c,55d 受光素子
57 赤外線受信回路
58 ワンチップマイコン
60 チャンネル設定スイッチ群
72 ベース板
74 X軸サーボユニット
75 固定フレーム
76 X軸サーボモータ
77 回転フレーム
80 Y軸サーボユニット
81 L字板
82 固定フレーム
83 Y軸サーボモータ
84 回転フレーム
85 支持板
91 ライト
101 テーブル
105 ビデオカメラ
107 展示物
Pc チャンネルパルス
Pi 停止期間
Pr 調査パルス
Ps スタートパルス
【特許請求の範囲】
【請求項1】
被追尾体となる発光素子から赤外線パルスを送信可能な赤外線送信装置と、
当該赤外線送信装置が送信する赤外線パルスを、少なくとも2個の受光素子を介して受信可能、かつ、各受光素子が受信した各信号レベルの比較結果を出力可能な赤外線受信装置と、
当該受光素子の受信方向を変更させるための駆動装置と、を含み、
当該駆動装置が、当該赤外線受信装置が出力した各信号レベルの比較結果に基づいて当該各受光素子の受信方向を変更させることによって当該赤外線送信装置の発光素子を追尾可能に構成してあり、
当該赤外線送信装置が、当該発光素子から送信する赤外線パルスを、所定レベルから時間経過に伴い段階的に減少させた後、所定レベルに復帰させるまでの周期を繰り返すように構成してある
ことを特徴とする赤外線追尾装置。
【請求項2】
前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数に基づいて各信号レベルの比較結果を出力可能に構成してある
ことを特徴とする請求項1記載の赤外線追尾装置。
【請求項3】
前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数が一致したときに、当該受信したパルス数に基づいて当該各受光素子と前記発光素子との間の距離を算出可能に構成してある
ことを特徴とする請求項2記載の赤外線追尾装置。
【請求項4】
前記受光素子が4個設けてあり、当該4個の受光素子の各々を直交する仮想線上の交点から等距離の位置に設けてある
ことを特徴とする請求項1乃至3何れか記載の赤外線追尾装置。
【請求項5】
前記仮想線上の交点から受信方向に向って突出する所定長さの遮蔽突起を設けてある
ことを特徴とする請求項4記載の赤外線追尾装置。
【請求項1】
被追尾体となる発光素子から赤外線パルスを送信可能な赤外線送信装置と、
当該赤外線送信装置が送信する赤外線パルスを、少なくとも2個の受光素子を介して受信可能、かつ、各受光素子が受信した各信号レベルの比較結果を出力可能な赤外線受信装置と、
当該受光素子の受信方向を変更させるための駆動装置と、を含み、
当該駆動装置が、当該赤外線受信装置が出力した各信号レベルの比較結果に基づいて当該各受光素子の受信方向を変更させることによって当該赤外線送信装置の発光素子を追尾可能に構成してあり、
当該赤外線送信装置が、当該発光素子から送信する赤外線パルスを、所定レベルから時間経過に伴い段階的に減少させた後、所定レベルに復帰させるまでの周期を繰り返すように構成してある
ことを特徴とする赤外線追尾装置。
【請求項2】
前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数に基づいて各信号レベルの比較結果を出力可能に構成してある
ことを特徴とする請求項1記載の赤外線追尾装置。
【請求項3】
前記赤外線受信装置が、前記各受光素子が受信した赤外線パルス1周期内におけるパルス数が一致したときに、当該受信したパルス数に基づいて当該各受光素子と前記発光素子との間の距離を算出可能に構成してある
ことを特徴とする請求項2記載の赤外線追尾装置。
【請求項4】
前記受光素子が4個設けてあり、当該4個の受光素子の各々を直交する仮想線上の交点から等距離の位置に設けてある
ことを特徴とする請求項1乃至3何れか記載の赤外線追尾装置。
【請求項5】
前記仮想線上の交点から受信方向に向って突出する所定長さの遮蔽突起を設けてある
ことを特徴とする請求項4記載の赤外線追尾装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2006−329796(P2006−329796A)
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願番号】特願2005−153290(P2005−153290)
【出願日】平成17年5月26日(2005.5.26)
【出願人】(506209422)地方独立行政法人 東京都立産業技術研究センター (134)
【Fターム(参考)】
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願日】平成17年5月26日(2005.5.26)
【出願人】(506209422)地方独立行政法人 東京都立産業技術研究センター (134)
【Fターム(参考)】
[ Back to top ]