
走査型プローブ顕微鏡および走査方法
【課題】 表面形状の勾配に応じてサンプリング間隔を設定するとともに、その間隔にしたがって探針を制御することにより、表面形状に適応し、測定時間の短縮と、測定精度の向上を実現すること。
【解決手段】 探針を走査時に、直前までの観測データを履歴として記憶し、観測データ形状を元に、XまたはY方向のサンプリング間隔をその都度設定し、次のサンプリング位置まで探針を走査することを特徴とする走査型プローブ顕微鏡を提供する。
【解決手段】 探針を走査時に、直前までの観測データを履歴として記憶し、観測データ形状を元に、XまたはY方向のサンプリング間隔をその都度設定し、次のサンプリング位置まで探針を走査することを特徴とする走査型プローブ顕微鏡を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、探針を試料表面上で振動させながら走査することにより、試料表面の形状や物性情報分布を得ることができる走査型プローブ顕微鏡および走査方法に関する。
【背景技術】
【0002】
従来、試料の微細形状や材料物性を観測する目的で、試料表面を探針で走査してこれらの情報を得る走査型トンネル顕微鏡や原子間力顕微鏡を含めた走査型プローブ顕微鏡が知られている。
【0003】
一例を挙げれば、探針を試料表面に対して垂直方向に振動させ、試料表面との平均の距離を一定に保ちながら表面を走査させて、試料表面の形状等を観測する超低力原子間力顕微鏡が知られている(たとえば、特許文献1参照)。
【0004】
上記超低力原子間力顕微鏡において、探針が垂直方向に振動している点は、探針を試料表面に対して平行に走査させる際の悪影響となる、探針と試料表面との間に働く摩擦力や、表面吸着水層による表面張力の影響を弱くする効果がある。
【0005】
近年、半導体やその他の加工技術において加工寸法の微細化、高度化が進展し、アスペクト比の高い構造や、これを構成する急斜面の微細形状を測定する必要性が高まっている。
【0006】
従来の走査型プローブ顕微鏡では、一定のサンプリング間隔で観測データを取得している。そのため、傾斜の急な領域と平坦な領域が混在している高アスペクト形状を測定する場合において、急な傾斜を必要な形状分解能で測定するには、サンプリング間隔を平らな領域よりも密にとる必要があるし、また、サンプリング間隔が一定であると、平らな領域では不必要にサンプリング点数が多くなることになる。
【0007】
この問題を避けるため、形状データを測定しながらサンプリング間隔を可変に設定する方法として、いくつかの提案がされている(例えば、特許文献2)。
【0008】
一方、高アスペクト比形状を測定する場合において、別の問題点も存在する。すなわち、通常の超低力原子間力顕微鏡における垂直方向の探針振動の振幅に比し、高さ方向の変動が大きすぎるため、走査に際して正確な形状に追従するのが困難になる場合があるというものである。近年、この困難を避ける方法の一つとして、サンプリング点において探針を垂直(Z)方向に下げ、表面に近接して形状を捉え、次に上げて離間して次のサンプリング点に移動する操作を繰り返す走査方法、いわゆるSISモードが提案されている(特許文献3参照)。
【0009】
SISモードではサンプリング点ごとに探針と試料間の距離を近接・離間させる時間が必要であり、走査全体にかかる所要時間は、サンプリング点数とともに長くなる。従って、不要に多いサンプリング点数は、不要に長い測定時間という問題を意味する。
【0010】
この問題に対して、従来の走査プローブ顕微鏡について提案されているサンプリング可変の方法は、上記特許文献3における走査方法の走査型プローブ顕微鏡には適用できないものである。例えば、特許文献2の走査プローブ顕微鏡は、探針が常に表面をトレースしている走査方法にのみ適用可能であり、上記特許文献3の走査型プローブ顕微鏡には適用できない。
【特許文献1】特許第2732771号明細書
【特許文献2】特開2002−014025号公報
【特許文献3】特開2005−069851号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明の目的は、表面形状の勾配に応じてサンプリング間隔を設定し、そのサンプリング間隔に従って探針を制御することにより、表面形状に精度よく追従するとともに、測定時間の短縮と、測定精度の向上を実現する走査方法および走査型プローブ顕微鏡を提供することである。
【課題を解決するための手段】
【0012】
本発明の走査型プローブ顕微鏡では、走査時のサンプリングにおいて現時点および、それ以前に採取した観測データをもとに、表面の勾配を求める。求められた勾配が所定の閾値よりも大きければ、次の測定点までのサンプリング間隔(移動量)を、それ以前のサンプリング間隔(移動量)より狭くする。あるいは、求められた勾配が所定の閾値よりも小さければ、次の測定点までのサンプリング間隔(移動量)を広くする。この工程を繰り返し行うことにより、勾配の急な領域と平坦な領域が混在する表面形状を走査する場合においても、勾配の度合いに応じて最適な測定精度を有するサンプリング間隔で測定し、サンプリング動作に付随する探針の上下運動の回数、また測定時間を精度に見合うよう最適化できる。
【0013】
また、本発明の走査型プローブ顕微鏡では、上記の方法で決定したサンプリング間隔に基づいて、次の時点のサンプリングを行った結果、観測データの変動がある所定の値より大きい場合、いったん走査を逆方向に後戻りして、サンプリング間隔をより狭くして再度走査し直すこともできる。これにより、直前のデータから予想した勾配より、実際の形状が大きくなる場合に、その部分のみ走査しなおすことで、測定時間は長くなるものの、測定精度がある下限値より悪くならない測定結果を得ることができる。
【0014】
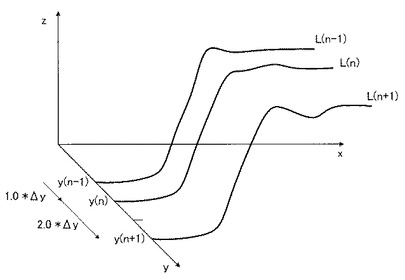
また、本発明の走査型プローブ顕微鏡では、Y方向の位置を順次変えながら、X方向に走査をする、いわゆるラスタースキャンにより表面測定を行う場合、現在のスキャンラインのY座標と、次回のスキャンラインのY座標との差であるY方向のサンプリング間隔を、これまでに取得したスキャンライン形状をもとに決定する。直前に測定した2つあるいはそれ以上のスキャンライン形状どうしの類似性を評価し、その類似性がある閾値以上に高ければ、Y方向のサンプリング間隔をより広くする。また、類似性がある閾値以下であれば、Y方向のサンプリング間隔をより狭くする。これにより、Y方向に形状の変化の少ない、平坦な領域では、サンプリングライン間隔を広げることで、測定精度の低下を最小限にとどめながらライン数を減らすことで測定時間を短縮し、勾配が急な領域では、サンプリングライン間隔を狭くして測定時間は増えるものの測定精度を高めることができる。このようにして、表面形状に適応した、測定精度を確保しながら測定時間を最適化した測定が可能になる。
【0015】
上記方法は、X方向でのサンプリング間隔の可変制御と組み合わせることが可能であり、両方の効果を合わせて得ることができる。
【発明の効果】
【0016】
この発明による走査型プローブ顕微鏡および走査方法によれば、急な勾配と平坦な領域が混在する表面形状を測定する際に、探針を走査しながら、表面形状に適応してサンプリング間隔を可変することで、急勾配の領域ではサンプリング間隔を小さく、平坦な領域ではサンプリング間隔を大きくし、サンプリング点数の削減による測定時間の短縮と、測定データの精度を最適化した測定を行うことができる。
【発明を実施するための最良の形態】
【0017】
以下に、本発明の走査型プローブ顕微鏡の第1実施例における、1ラインの走査方法について、図1、図2、図3を参照して説明する。
【0018】
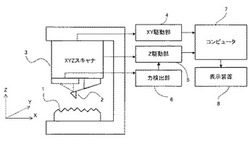
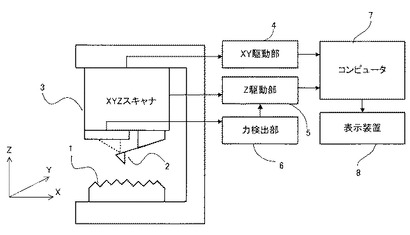
本実施形態の走査型プローブ顕微鏡は、図1に示すように、測定試料表面に平行なXおよびY方向の走査と該試料表面に垂直なZ方向の移動とを該試料表面に対して相対的に行える探針2と、該探針2が試料表面に近接または接触した際に、該試料表面から受ける相互作用力を検出する力検出部6と、該探針2を制御するとともに観測データを採取し、かつ各観測位置の座標およびその位置での観測データを記憶するためのコンピュータ7(制御手段、観測手段、および記憶手段)と、観測データを外部に出力する表示装置8とを備えている。
【0019】
このような構成の走査型プローブ顕微鏡により、試料表面に対して探針を走査して観測データを採取し、該試料の表面形状像を1ライン分測定する場合について以下に説明する。該試料の表面形状像をXY平面にわたって走査して測定する場合は、Y位置の位置を変えながら、1ラインの走査を繰り返し行えばよい。
【0020】
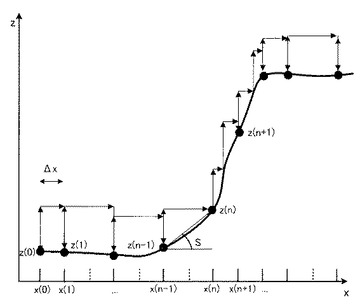
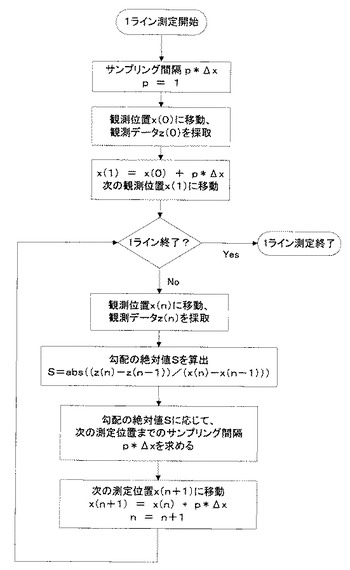
図2は、ライン走査の探針の軌跡を表す図であり、図3は、走査手順をあらわすフローチャートである。
【0021】
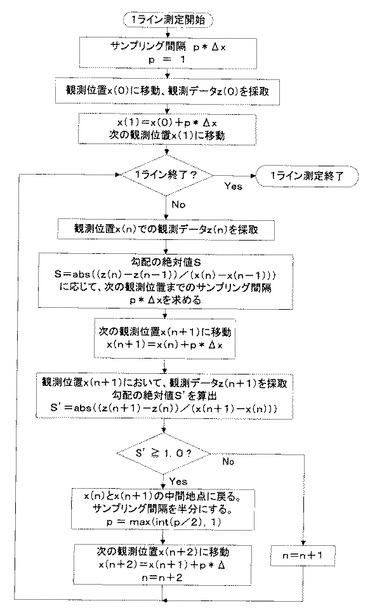
走査を行う前に、サンプリング間隔p*Δxを設定する。サンプリング間隔の単位Δxは、サンプリング間隔の最小単位を表し、試料表面を測定する際に必要な精度、走査範囲などからあらかじめ決めることができる。また、pは1以上の整数を表し、初期値は1とする。サンプリング間隔はΔxを単位として、一つのスキャンライン中において、その整数倍で変動する。
【0022】
まず、探針を観測位置x(0)まで移動する。次に、探針が試料表面に近づくようにZ方向に移動する。探針が試料表面に近接もしくは接触すると、力検出部が力を感知するので、その時点で探針の移動を停止し、観測位置x(0)における観測データ、すなわちZ方向の位置データz(0)を採取する。
【0023】
次に、探針を予め定められた距離Δz、例えば10nmだけ試料表面から離れるようにZ方向に移動する。その後、次回の観測位置x(1)まで探針をX方向に移動する。現在の観測位置x(0)から次回の観測位置x(1)までの距離は、x方向においてp*Δxである。
【0024】
この移動過程の途中において、試料表面に高さΔz以上の凸形状があった場合、探針が試料表面に近接もしくは接触することになるが、これは力検出部6で検知される。探針の近接もしくは接触を検知したら、直ちに探針のX方向移動を一時停止し、距離Δzだけ探針を試料表面から離したのち、探針のX方向への移動を再開する。このようにして最終的には探針は次回の観測位置x(1)まで移動する。探針が次回の観測位置x(1)まで移動したら、観測位置x(0)での動作と同様に、観測位置x(1)での観測データz(1)を採取する。
【0025】
引き続き、nが2以上であるとして、走査方法について説明する。
【0026】
現在の観測位置x(n)に探針が移動した状態で、上記x(0)と同様にx(n)での観測データz(n)を採取する。次に、次回の観測位置x(n+1)を、現在の観測位置x(n)およびそこでの観測データz(n)、直前の観測位置x(n−1)およびその位置での観測データz(n−1)を元に、次のようにして決定する。
【0027】
すなわち、直前の観測点と現在の観測点を結ぶ直線の勾配Sを、以下の式によって求める。
【0028】
S=abs((z(n)−z(n−1))/(x(n)−x(n−1)))
ここで、abs(x)はxの絶対値を求める関数である。
【0029】
次に、勾配Sの値に応じて、x(n)からx(n+1)までのサンプリング間隔p*Δxを次のようにして決める。
【0030】
S≧2.0 の場合 … p=max(int(p/4),1)
1.0 ≦S<2.0 の場合 … p=max(int(p/2),1)
0.5 ≦S<1.0 の場合 … p=p
0.25≦S<0.5 の場合 … p=min(2*p,pMax)
S<0.25の場合 … p=min(4*p,pMax)
ただし、max(x,y)は、xとyの大きなほうの値を求める関数で、int(x)は、xの小数点以下を切り捨てて整数値を求める関数である。min(x,y)は、xとyの小さなほうの値を求める関数である。また、pMaxは、設定可能な最大のサンプリング間隔を表す走査パラメータであり、求められる走査時間と測定データの測定精度の兼ね合いから調節する。
【0031】
このようにしてサンプリング間隔p*Δxが決まったら、次回の観測位置x(n+1)が決まるので、探針をx(n+1)までX方向に移動する。ここでの移動途中でもx(0)からx(1)への移動と同様、探針が試料表面に近接もしくは接触した場合、その都度探針をΔzだけ離間させる。
【0032】
以上の動作を繰り返し行うことにより、各観測位置x(n)における観測データz(n)を採取してゆく。観測位置x(n)が、予め設定された走査範囲に達したら、1ラインの走査を終了する。
【0033】
本実施例においてはpを整数としたが、pを実数として、勾配Sからサンプリング間隔を変更するための判定式を異なる式に置き換えることもできる。
【0034】
次に、本発明の走査型プローブ顕微鏡の第2実施例における、各スキャンラインの走査方法について、フローチャート図4を参照して説明する。第2実施形態が第1実施形態と異なる点を以下に述べる。第2実施形態では、上記勾配Sを元にx(n+1)を決定した後、観測位置x(n+1)に移動して観測データz(n+1)を測定する。決定および採取したx(n),z(n),x(n+1),z(n+1)の値から、勾配S’を以下の式によって求める。
【0035】
S’=abs((z(n+1)−z(n))/(x(n+1)−x(n)))
勾配S’が予め定められたある値、たとえば1.0以上であれば、探針の走査をいったん後戻りする。すなわち、観測位置x(n)と観測位置x(n+1)の間の位置、たとえばx(n)とx(n+1)の中間点(x(n)+x(n+1))/2に探針を移動させ、この位置を改めてx(n+1)と設定し、ここでの観測データz(n+1)を採取する。また、サンプリング間隔p*Δxは以下の式で示されるように半分に縮める。
【0036】
p=max(int(p/2),1)
これにより、直前の形状データから決定したサンプリング間隔で測定した結果、想定した以上に凹凸が大きく、得られるデータでは形状精度が悪化する場合、一旦逆戻りしてサンプリング間隔を前回より細かくして再走査することで、測定精度の悪化を防止することができる。第1実施形態と比較すると、測定時間がより長くなる可能性があるが、測定精度の下限を保障したデータを得られるというメリットがある。
【0037】
次に、本発明の走査型プローブ顕微鏡の第3実施例における、面スキャンの走査方法について、図5、図6を参照して説明する。図5は、本実施例でのラスター走査の探針の軌跡を表す図であり、図6は、走査手順をあらわすフローチャートである。
【0038】
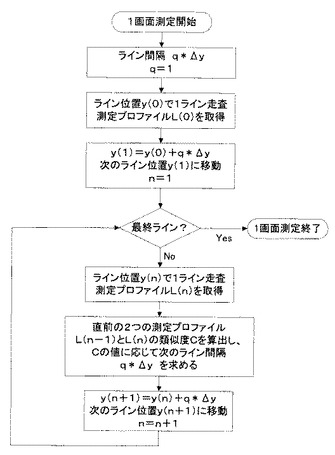
走査を行う前に、Y方向のライン間隔q*Δyを設定する。ライン間隔の単位Δyは、ライン間隔の最小単位を表し、試料表面を測定する際に必要な精度、走査範囲などからあらかじめ決めることができる。また、qは1以上の整数を表し、初期値は1とする。ライン間隔はΔyを単位として、一つのラスター画面内において、その整数倍で変動する。
【0039】
まず、最初のライン位置y(0)に探針を移動し、X方向に探針を走査し、測定プロファイルL(0)を測定する。測定プロファイルは、各サンプリング点での測定データ列で構成される。
【0040】
次に、探針をY方向にq*Δyだけ移動し、ここを次のライン位置y(1)として、同様にX方向に走査し、測定プロファイルL(1)を取得する。
【0041】
次に、nが2以上の場合、測定プロファイルL(n+1)の走査は以下の方法で行う。
【0042】
直前に測定した2つの測定プロファイルL(n−1)と測定プロファイルL(n)のデータとの類似度を算出する。類似度を算出する方法の一つとして、測定プロファイルL(n−1)のデータ列をz1(n){n=0,1,…,N}、測定プロファイルL(n)のデータ列をz2(n){n=0,1,…,N}として、相互相関関数R(k)を以下の式で書けば、
【0043】
【数1】

【0044】
となり、類似度CをR(k){k=0,…,N−1}の最大値で定義することができる。
【0045】
C=max(R(0),…,R(N−1))
Y方向のサンプリング間隔q*Δyを決定するために、求められたCとある予め決められた値、たとえば0.9、とを比較し、例えば下記の判定式を用いる。
【0046】
C≧0.9の場合 … q=min(2*q,qMax)
C<0.9の場合 … q=max(int(q/2),1)
次に、y(n)からサンプリング間隔q*ΔyだけY方向に移動し、ここをy(n+1)として、測定プロファイルL(n+1)を測定する。
【0047】
以上の動作を繰り返し行うことにより、各観測位置y(n)における測定プロファイルL(n)を採取してゆく。観測位置y(n)が、予め設定された走査範囲に達したら、1画面の走査を終了する。
【0048】
本実施例においてはqを整数としたが、qを実数として、類似度Cからライン間隔を変更するための判定式を上記とは異なる式に置き換えることもできる。
【0049】
また、本実施例においては類似度Cを、測定プロファイルL(n−1)と、測定プロファイルL(n)との相互相関関数から算出しているが、相互相関関数以外の関数も使用することができる。たとえば、プロファイルどうしの差分を、次の式で表されるDで算出して、Dが0に近いほど類似度が高いとしてサンプリング間隔の判定式を定めることができる。
【0050】
【数2】
【0051】
また、これまで述べてきた実施例では、観測データのうち、形状データを判定基準としてサンプリング間隔、あるいはライン間隔を可変に設定していた。本発明ではそれだけに限らず、形状データ以外の種類のデータや、複数の種類のデータを用いて、サンプリング間隔あるいはライン間隔を変更する判定基準にしてもよい。たとえば、形状と電流値を同時に測定する走査型プローブ顕微鏡の場合、電流値の変動がより大きな領域ではサンプリング間隔をより密にするといった走査方法が考えられる。あるいは、電流値の変動と形状の変動を両方加味してサンプリング間隔を調節する走査方法も考えられる。
【図面の簡単な説明】
【0052】
【図1】本発明の実施例における走査型プローブ顕微鏡のブロック図である。
【図2】本発明の第1実施形態における探針の走査軌跡である。
【図3】本発明の第1実施形態における探針の走査方法をあらわすフローチャートである。
【図4】本発明の第2実施形態における探針の走査方法をあらわすフローチャートである。
【図5】本発明の第3実施形態における探針の走査軌跡群である。
【図6】本発明の第3実施形態における探針の走査方法をあらわすフローチャートである。
【符号の説明】
【0053】
1 試料表面
2 探針
3 XYZスキャナ
4 XY駆動部
5 Z駆動部
6 力検出部
7 コンピュータ
8 表示装置
【技術分野】
【0001】
本発明は、探針を試料表面上で振動させながら走査することにより、試料表面の形状や物性情報分布を得ることができる走査型プローブ顕微鏡および走査方法に関する。
【背景技術】
【0002】
従来、試料の微細形状や材料物性を観測する目的で、試料表面を探針で走査してこれらの情報を得る走査型トンネル顕微鏡や原子間力顕微鏡を含めた走査型プローブ顕微鏡が知られている。
【0003】
一例を挙げれば、探針を試料表面に対して垂直方向に振動させ、試料表面との平均の距離を一定に保ちながら表面を走査させて、試料表面の形状等を観測する超低力原子間力顕微鏡が知られている(たとえば、特許文献1参照)。
【0004】
上記超低力原子間力顕微鏡において、探針が垂直方向に振動している点は、探針を試料表面に対して平行に走査させる際の悪影響となる、探針と試料表面との間に働く摩擦力や、表面吸着水層による表面張力の影響を弱くする効果がある。
【0005】
近年、半導体やその他の加工技術において加工寸法の微細化、高度化が進展し、アスペクト比の高い構造や、これを構成する急斜面の微細形状を測定する必要性が高まっている。
【0006】
従来の走査型プローブ顕微鏡では、一定のサンプリング間隔で観測データを取得している。そのため、傾斜の急な領域と平坦な領域が混在している高アスペクト形状を測定する場合において、急な傾斜を必要な形状分解能で測定するには、サンプリング間隔を平らな領域よりも密にとる必要があるし、また、サンプリング間隔が一定であると、平らな領域では不必要にサンプリング点数が多くなることになる。
【0007】
この問題を避けるため、形状データを測定しながらサンプリング間隔を可変に設定する方法として、いくつかの提案がされている(例えば、特許文献2)。
【0008】
一方、高アスペクト比形状を測定する場合において、別の問題点も存在する。すなわち、通常の超低力原子間力顕微鏡における垂直方向の探針振動の振幅に比し、高さ方向の変動が大きすぎるため、走査に際して正確な形状に追従するのが困難になる場合があるというものである。近年、この困難を避ける方法の一つとして、サンプリング点において探針を垂直(Z)方向に下げ、表面に近接して形状を捉え、次に上げて離間して次のサンプリング点に移動する操作を繰り返す走査方法、いわゆるSISモードが提案されている(特許文献3参照)。
【0009】
SISモードではサンプリング点ごとに探針と試料間の距離を近接・離間させる時間が必要であり、走査全体にかかる所要時間は、サンプリング点数とともに長くなる。従って、不要に多いサンプリング点数は、不要に長い測定時間という問題を意味する。
【0010】
この問題に対して、従来の走査プローブ顕微鏡について提案されているサンプリング可変の方法は、上記特許文献3における走査方法の走査型プローブ顕微鏡には適用できないものである。例えば、特許文献2の走査プローブ顕微鏡は、探針が常に表面をトレースしている走査方法にのみ適用可能であり、上記特許文献3の走査型プローブ顕微鏡には適用できない。
【特許文献1】特許第2732771号明細書
【特許文献2】特開2002−014025号公報
【特許文献3】特開2005−069851号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明の目的は、表面形状の勾配に応じてサンプリング間隔を設定し、そのサンプリング間隔に従って探針を制御することにより、表面形状に精度よく追従するとともに、測定時間の短縮と、測定精度の向上を実現する走査方法および走査型プローブ顕微鏡を提供することである。
【課題を解決するための手段】
【0012】
本発明の走査型プローブ顕微鏡では、走査時のサンプリングにおいて現時点および、それ以前に採取した観測データをもとに、表面の勾配を求める。求められた勾配が所定の閾値よりも大きければ、次の測定点までのサンプリング間隔(移動量)を、それ以前のサンプリング間隔(移動量)より狭くする。あるいは、求められた勾配が所定の閾値よりも小さければ、次の測定点までのサンプリング間隔(移動量)を広くする。この工程を繰り返し行うことにより、勾配の急な領域と平坦な領域が混在する表面形状を走査する場合においても、勾配の度合いに応じて最適な測定精度を有するサンプリング間隔で測定し、サンプリング動作に付随する探針の上下運動の回数、また測定時間を精度に見合うよう最適化できる。
【0013】
また、本発明の走査型プローブ顕微鏡では、上記の方法で決定したサンプリング間隔に基づいて、次の時点のサンプリングを行った結果、観測データの変動がある所定の値より大きい場合、いったん走査を逆方向に後戻りして、サンプリング間隔をより狭くして再度走査し直すこともできる。これにより、直前のデータから予想した勾配より、実際の形状が大きくなる場合に、その部分のみ走査しなおすことで、測定時間は長くなるものの、測定精度がある下限値より悪くならない測定結果を得ることができる。
【0014】
また、本発明の走査型プローブ顕微鏡では、Y方向の位置を順次変えながら、X方向に走査をする、いわゆるラスタースキャンにより表面測定を行う場合、現在のスキャンラインのY座標と、次回のスキャンラインのY座標との差であるY方向のサンプリング間隔を、これまでに取得したスキャンライン形状をもとに決定する。直前に測定した2つあるいはそれ以上のスキャンライン形状どうしの類似性を評価し、その類似性がある閾値以上に高ければ、Y方向のサンプリング間隔をより広くする。また、類似性がある閾値以下であれば、Y方向のサンプリング間隔をより狭くする。これにより、Y方向に形状の変化の少ない、平坦な領域では、サンプリングライン間隔を広げることで、測定精度の低下を最小限にとどめながらライン数を減らすことで測定時間を短縮し、勾配が急な領域では、サンプリングライン間隔を狭くして測定時間は増えるものの測定精度を高めることができる。このようにして、表面形状に適応した、測定精度を確保しながら測定時間を最適化した測定が可能になる。
【0015】
上記方法は、X方向でのサンプリング間隔の可変制御と組み合わせることが可能であり、両方の効果を合わせて得ることができる。
【発明の効果】
【0016】
この発明による走査型プローブ顕微鏡および走査方法によれば、急な勾配と平坦な領域が混在する表面形状を測定する際に、探針を走査しながら、表面形状に適応してサンプリング間隔を可変することで、急勾配の領域ではサンプリング間隔を小さく、平坦な領域ではサンプリング間隔を大きくし、サンプリング点数の削減による測定時間の短縮と、測定データの精度を最適化した測定を行うことができる。
【発明を実施するための最良の形態】
【0017】
以下に、本発明の走査型プローブ顕微鏡の第1実施例における、1ラインの走査方法について、図1、図2、図3を参照して説明する。
【0018】
本実施形態の走査型プローブ顕微鏡は、図1に示すように、測定試料表面に平行なXおよびY方向の走査と該試料表面に垂直なZ方向の移動とを該試料表面に対して相対的に行える探針2と、該探針2が試料表面に近接または接触した際に、該試料表面から受ける相互作用力を検出する力検出部6と、該探針2を制御するとともに観測データを採取し、かつ各観測位置の座標およびその位置での観測データを記憶するためのコンピュータ7(制御手段、観測手段、および記憶手段)と、観測データを外部に出力する表示装置8とを備えている。
【0019】
このような構成の走査型プローブ顕微鏡により、試料表面に対して探針を走査して観測データを採取し、該試料の表面形状像を1ライン分測定する場合について以下に説明する。該試料の表面形状像をXY平面にわたって走査して測定する場合は、Y位置の位置を変えながら、1ラインの走査を繰り返し行えばよい。
【0020】
図2は、ライン走査の探針の軌跡を表す図であり、図3は、走査手順をあらわすフローチャートである。
【0021】
走査を行う前に、サンプリング間隔p*Δxを設定する。サンプリング間隔の単位Δxは、サンプリング間隔の最小単位を表し、試料表面を測定する際に必要な精度、走査範囲などからあらかじめ決めることができる。また、pは1以上の整数を表し、初期値は1とする。サンプリング間隔はΔxを単位として、一つのスキャンライン中において、その整数倍で変動する。
【0022】
まず、探針を観測位置x(0)まで移動する。次に、探針が試料表面に近づくようにZ方向に移動する。探針が試料表面に近接もしくは接触すると、力検出部が力を感知するので、その時点で探針の移動を停止し、観測位置x(0)における観測データ、すなわちZ方向の位置データz(0)を採取する。
【0023】
次に、探針を予め定められた距離Δz、例えば10nmだけ試料表面から離れるようにZ方向に移動する。その後、次回の観測位置x(1)まで探針をX方向に移動する。現在の観測位置x(0)から次回の観測位置x(1)までの距離は、x方向においてp*Δxである。
【0024】
この移動過程の途中において、試料表面に高さΔz以上の凸形状があった場合、探針が試料表面に近接もしくは接触することになるが、これは力検出部6で検知される。探針の近接もしくは接触を検知したら、直ちに探針のX方向移動を一時停止し、距離Δzだけ探針を試料表面から離したのち、探針のX方向への移動を再開する。このようにして最終的には探針は次回の観測位置x(1)まで移動する。探針が次回の観測位置x(1)まで移動したら、観測位置x(0)での動作と同様に、観測位置x(1)での観測データz(1)を採取する。
【0025】
引き続き、nが2以上であるとして、走査方法について説明する。
【0026】
現在の観測位置x(n)に探針が移動した状態で、上記x(0)と同様にx(n)での観測データz(n)を採取する。次に、次回の観測位置x(n+1)を、現在の観測位置x(n)およびそこでの観測データz(n)、直前の観測位置x(n−1)およびその位置での観測データz(n−1)を元に、次のようにして決定する。
【0027】
すなわち、直前の観測点と現在の観測点を結ぶ直線の勾配Sを、以下の式によって求める。
【0028】
S=abs((z(n)−z(n−1))/(x(n)−x(n−1)))
ここで、abs(x)はxの絶対値を求める関数である。
【0029】
次に、勾配Sの値に応じて、x(n)からx(n+1)までのサンプリング間隔p*Δxを次のようにして決める。
【0030】
S≧2.0 の場合 … p=max(int(p/4),1)
1.0 ≦S<2.0 の場合 … p=max(int(p/2),1)
0.5 ≦S<1.0 の場合 … p=p
0.25≦S<0.5 の場合 … p=min(2*p,pMax)
S<0.25の場合 … p=min(4*p,pMax)
ただし、max(x,y)は、xとyの大きなほうの値を求める関数で、int(x)は、xの小数点以下を切り捨てて整数値を求める関数である。min(x,y)は、xとyの小さなほうの値を求める関数である。また、pMaxは、設定可能な最大のサンプリング間隔を表す走査パラメータであり、求められる走査時間と測定データの測定精度の兼ね合いから調節する。
【0031】
このようにしてサンプリング間隔p*Δxが決まったら、次回の観測位置x(n+1)が決まるので、探針をx(n+1)までX方向に移動する。ここでの移動途中でもx(0)からx(1)への移動と同様、探針が試料表面に近接もしくは接触した場合、その都度探針をΔzだけ離間させる。
【0032】
以上の動作を繰り返し行うことにより、各観測位置x(n)における観測データz(n)を採取してゆく。観測位置x(n)が、予め設定された走査範囲に達したら、1ラインの走査を終了する。
【0033】
本実施例においてはpを整数としたが、pを実数として、勾配Sからサンプリング間隔を変更するための判定式を異なる式に置き換えることもできる。
【0034】
次に、本発明の走査型プローブ顕微鏡の第2実施例における、各スキャンラインの走査方法について、フローチャート図4を参照して説明する。第2実施形態が第1実施形態と異なる点を以下に述べる。第2実施形態では、上記勾配Sを元にx(n+1)を決定した後、観測位置x(n+1)に移動して観測データz(n+1)を測定する。決定および採取したx(n),z(n),x(n+1),z(n+1)の値から、勾配S’を以下の式によって求める。
【0035】
S’=abs((z(n+1)−z(n))/(x(n+1)−x(n)))
勾配S’が予め定められたある値、たとえば1.0以上であれば、探針の走査をいったん後戻りする。すなわち、観測位置x(n)と観測位置x(n+1)の間の位置、たとえばx(n)とx(n+1)の中間点(x(n)+x(n+1))/2に探針を移動させ、この位置を改めてx(n+1)と設定し、ここでの観測データz(n+1)を採取する。また、サンプリング間隔p*Δxは以下の式で示されるように半分に縮める。
【0036】
p=max(int(p/2),1)
これにより、直前の形状データから決定したサンプリング間隔で測定した結果、想定した以上に凹凸が大きく、得られるデータでは形状精度が悪化する場合、一旦逆戻りしてサンプリング間隔を前回より細かくして再走査することで、測定精度の悪化を防止することができる。第1実施形態と比較すると、測定時間がより長くなる可能性があるが、測定精度の下限を保障したデータを得られるというメリットがある。
【0037】
次に、本発明の走査型プローブ顕微鏡の第3実施例における、面スキャンの走査方法について、図5、図6を参照して説明する。図5は、本実施例でのラスター走査の探針の軌跡を表す図であり、図6は、走査手順をあらわすフローチャートである。
【0038】
走査を行う前に、Y方向のライン間隔q*Δyを設定する。ライン間隔の単位Δyは、ライン間隔の最小単位を表し、試料表面を測定する際に必要な精度、走査範囲などからあらかじめ決めることができる。また、qは1以上の整数を表し、初期値は1とする。ライン間隔はΔyを単位として、一つのラスター画面内において、その整数倍で変動する。
【0039】
まず、最初のライン位置y(0)に探針を移動し、X方向に探針を走査し、測定プロファイルL(0)を測定する。測定プロファイルは、各サンプリング点での測定データ列で構成される。
【0040】
次に、探針をY方向にq*Δyだけ移動し、ここを次のライン位置y(1)として、同様にX方向に走査し、測定プロファイルL(1)を取得する。
【0041】
次に、nが2以上の場合、測定プロファイルL(n+1)の走査は以下の方法で行う。
【0042】
直前に測定した2つの測定プロファイルL(n−1)と測定プロファイルL(n)のデータとの類似度を算出する。類似度を算出する方法の一つとして、測定プロファイルL(n−1)のデータ列をz1(n){n=0,1,…,N}、測定プロファイルL(n)のデータ列をz2(n){n=0,1,…,N}として、相互相関関数R(k)を以下の式で書けば、
【0043】
【数1】
【0044】
となり、類似度CをR(k){k=0,…,N−1}の最大値で定義することができる。
【0045】
C=max(R(0),…,R(N−1))
Y方向のサンプリング間隔q*Δyを決定するために、求められたCとある予め決められた値、たとえば0.9、とを比較し、例えば下記の判定式を用いる。
【0046】
C≧0.9の場合 … q=min(2*q,qMax)
C<0.9の場合 … q=max(int(q/2),1)
次に、y(n)からサンプリング間隔q*ΔyだけY方向に移動し、ここをy(n+1)として、測定プロファイルL(n+1)を測定する。
【0047】
以上の動作を繰り返し行うことにより、各観測位置y(n)における測定プロファイルL(n)を採取してゆく。観測位置y(n)が、予め設定された走査範囲に達したら、1画面の走査を終了する。
【0048】
本実施例においてはqを整数としたが、qを実数として、類似度Cからライン間隔を変更するための判定式を上記とは異なる式に置き換えることもできる。
【0049】
また、本実施例においては類似度Cを、測定プロファイルL(n−1)と、測定プロファイルL(n)との相互相関関数から算出しているが、相互相関関数以外の関数も使用することができる。たとえば、プロファイルどうしの差分を、次の式で表されるDで算出して、Dが0に近いほど類似度が高いとしてサンプリング間隔の判定式を定めることができる。
【0050】
【数2】
【0051】
また、これまで述べてきた実施例では、観測データのうち、形状データを判定基準としてサンプリング間隔、あるいはライン間隔を可変に設定していた。本発明ではそれだけに限らず、形状データ以外の種類のデータや、複数の種類のデータを用いて、サンプリング間隔あるいはライン間隔を変更する判定基準にしてもよい。たとえば、形状と電流値を同時に測定する走査型プローブ顕微鏡の場合、電流値の変動がより大きな領域ではサンプリング間隔をより密にするといった走査方法が考えられる。あるいは、電流値の変動と形状の変動を両方加味してサンプリング間隔を調節する走査方法も考えられる。
【図面の簡単な説明】
【0052】
【図1】本発明の実施例における走査型プローブ顕微鏡のブロック図である。
【図2】本発明の第1実施形態における探針の走査軌跡である。
【図3】本発明の第1実施形態における探針の走査方法をあらわすフローチャートである。
【図4】本発明の第2実施形態における探針の走査方法をあらわすフローチャートである。
【図5】本発明の第3実施形態における探針の走査軌跡群である。
【図6】本発明の第3実施形態における探針の走査方法をあらわすフローチャートである。
【符号の説明】
【0053】
1 試料表面
2 探針
3 XYZスキャナ
4 XY駆動部
5 Z駆動部
6 力検出部
7 コンピュータ
8 表示装置
【特許請求の範囲】
【請求項1】
試料表面に平行なXおよびY方向への走査移動と該試料表面に垂直なZ方向の移動とを該試料表面に対して相対的に行える探針と、
該探針が前記試料表面に近接または接触した時点において1種類以上の観測データを採取する観測手段と、
前記観測データを採取した後、前記XまたはY方向の次回の観測位置に達するまで前記試料表面に平行な方向に探針を走査移動させ、該走査中に前記探針が前記試料表面に近接または接触した際には、探針を試料表面からZ方向に離し移動させ、かつ、前記次回の観測位置に達した際には、探針の走査を停止するとともに、探針を試料表面に近接または接触させて前記観測データを採取するように探針を制御する制御手段と、
各観測位置の座標およびその位置での観測データを記憶する手段と、を備え、
前記制御手段は、前記観測データを複数の観測位置で採取し、採取した複数の観測データを用いて前記XまたはY方向の次回の観測位置を決定することを特徴とする走査型プローブ顕微鏡。
【請求項2】
請求項1記載の走査型プローブ顕微鏡において、
観測データのうちの1種類が、試料表面に前記探針が近接あるいは接触した時点のZ位置を表す形状データであり、
前記制御手段が、XまたはY方向に探針を走査するとき、採取された前記形状データの履歴を基に、所定の手順で算出される形状勾配に応じて、前記観測位置から次回の観測位置までのXまたはY方向の移動量を変更することを特徴とする走査型プローブ顕微鏡。
【請求項3】
請求項2に記載の走査型プローブ顕微鏡において、
前記制御手段が、前記形状データの履歴から求められる形状勾配に応じて、前記観測位置から次回の観測位置までの移動量を、所定のX方向の最小ステップ距離の整数倍で可変的に設定することを特徴とする走査型プローブ顕微鏡。
【請求項4】
請求項1に記載の走査型プローブ顕微鏡において、
前記制御手段が、前記観測データの履歴から求められる観測データの変化率が所定のしきい値を超える場合、次回の観測位置から後戻りし、前回の移動量よりも小さな移動量に設定して再度走査するように探針を制御することを特徴とする走査型プローブ顕微鏡。
【請求項5】
請求項1に記載の走査型プローブ顕微鏡において、
Y方向の位置をその都度変えながら、X方向の走査を繰り返し行う際に、各Y位置の座標およびそのY位置で走査して採取したX方向観測データ列を履歴として記憶し、複数のY位置と対応するX走査データ列の履歴を元に、最新のY位置から次回のY位置までの移動量を、各Y位置でのX走査完了の都度可変的に設定することを特徴とする走査型プローブ顕微鏡。
【請求項6】
請求項5に記載の走査型プローブ顕微鏡において、
観測データのうち1種類が、前記探針が試料表面に近接あるいは接触した時点のZ位置であらわされる形状データであり、
前記制御手段が、複数の前記X走査データ列を採取したあと、直近に採取した2つ以上のX走査データ列の類似度を評価し、その類似度の度合いに応じて、前記最新のY位置から次回のY位置までの移動量を、その都度可変的に設定することを特徴とする走査型プローブ顕微鏡。
【請求項7】
請求項6に記載の走査型プローブ顕微鏡において、
前記制御手段が、前記X走査データ列の直近に採取した2つ以上のX走査データ列の類似度を評価し、その類似度の度合いに応じて、前記最新のY位置から次回のY位置までの移動量を、所定のY方向の最小ステップ距離の整数倍で可変的に設定することを特徴とする走査型プローブ顕微鏡。
【請求項8】
請求項6に記載の走査型プローブ顕微鏡において、
前記制御手段が、前記X走査データ列のうち直近に採取した2つ以上のX走査データ列の類似度を評価し、その類似度が所定のしきい値を下回る場合、一旦Y軸の走査方向を後戻りして、前回の移動量を前回より小さな距離に設定して、Y方向に走査しなおすことを特徴とする走査型プローブ顕微鏡。
【請求項9】
請求項6〜8のいずれか1項に記載の走査型プローブ顕微鏡において、
前記類似度が、複数のX走査データ列で対応するX座標のデータの差分を含む演算で評価されることを特徴とする走査型プローブ顕微鏡。
【請求項10】
請求項6〜8のいずれか1項に記載の走査型プローブ顕微鏡において、
前記類似度が、複数のX走査データ列の相互相関関数で評価されることを特徴とする走査型プローブ顕微鏡。
【請求項11】
試料表面に平行なXおよびY方向への走査移動と該試料表面に垂直なZ方向の移動とを該試料表面に対して相対的に行える探針と、
該探針が前記試料表面に近接または接触した時点において1種類以上の観測データを採取する観測手段と、
各観測位置の座標およびその位置での観測データを記憶する手段と、を備える走査型プローブ顕微鏡を用いた走査方法であって、
前記観測データを採取した後、前記XまたはY方向の次回の観測位置に達するまで前記試料表面に平行な方向に探針を走査移動させ、該走査中に前記探針が前記試料表面に近接または接触した際には、探針を試料表面からZ方向に離し移動させる工程と、
前記次回の観測位置に達した際には、探針の走査を停止するとともに、探針を試料表面に近接または接触させて前記観測データを採取する工程と、
前記観測データを複数の観測位置で採取し、採取した複数の観測データを用いて前記XまたはY方向の次回の観測位置を決定する工程と、を備えていることを特徴とする走査方法。
【請求項1】
試料表面に平行なXおよびY方向への走査移動と該試料表面に垂直なZ方向の移動とを該試料表面に対して相対的に行える探針と、
該探針が前記試料表面に近接または接触した時点において1種類以上の観測データを採取する観測手段と、
前記観測データを採取した後、前記XまたはY方向の次回の観測位置に達するまで前記試料表面に平行な方向に探針を走査移動させ、該走査中に前記探針が前記試料表面に近接または接触した際には、探針を試料表面からZ方向に離し移動させ、かつ、前記次回の観測位置に達した際には、探針の走査を停止するとともに、探針を試料表面に近接または接触させて前記観測データを採取するように探針を制御する制御手段と、
各観測位置の座標およびその位置での観測データを記憶する手段と、を備え、
前記制御手段は、前記観測データを複数の観測位置で採取し、採取した複数の観測データを用いて前記XまたはY方向の次回の観測位置を決定することを特徴とする走査型プローブ顕微鏡。
【請求項2】
請求項1記載の走査型プローブ顕微鏡において、
観測データのうちの1種類が、試料表面に前記探針が近接あるいは接触した時点のZ位置を表す形状データであり、
前記制御手段が、XまたはY方向に探針を走査するとき、採取された前記形状データの履歴を基に、所定の手順で算出される形状勾配に応じて、前記観測位置から次回の観測位置までのXまたはY方向の移動量を変更することを特徴とする走査型プローブ顕微鏡。
【請求項3】
請求項2に記載の走査型プローブ顕微鏡において、
前記制御手段が、前記形状データの履歴から求められる形状勾配に応じて、前記観測位置から次回の観測位置までの移動量を、所定のX方向の最小ステップ距離の整数倍で可変的に設定することを特徴とする走査型プローブ顕微鏡。
【請求項4】
請求項1に記載の走査型プローブ顕微鏡において、
前記制御手段が、前記観測データの履歴から求められる観測データの変化率が所定のしきい値を超える場合、次回の観測位置から後戻りし、前回の移動量よりも小さな移動量に設定して再度走査するように探針を制御することを特徴とする走査型プローブ顕微鏡。
【請求項5】
請求項1に記載の走査型プローブ顕微鏡において、
Y方向の位置をその都度変えながら、X方向の走査を繰り返し行う際に、各Y位置の座標およびそのY位置で走査して採取したX方向観測データ列を履歴として記憶し、複数のY位置と対応するX走査データ列の履歴を元に、最新のY位置から次回のY位置までの移動量を、各Y位置でのX走査完了の都度可変的に設定することを特徴とする走査型プローブ顕微鏡。
【請求項6】
請求項5に記載の走査型プローブ顕微鏡において、
観測データのうち1種類が、前記探針が試料表面に近接あるいは接触した時点のZ位置であらわされる形状データであり、
前記制御手段が、複数の前記X走査データ列を採取したあと、直近に採取した2つ以上のX走査データ列の類似度を評価し、その類似度の度合いに応じて、前記最新のY位置から次回のY位置までの移動量を、その都度可変的に設定することを特徴とする走査型プローブ顕微鏡。
【請求項7】
請求項6に記載の走査型プローブ顕微鏡において、
前記制御手段が、前記X走査データ列の直近に採取した2つ以上のX走査データ列の類似度を評価し、その類似度の度合いに応じて、前記最新のY位置から次回のY位置までの移動量を、所定のY方向の最小ステップ距離の整数倍で可変的に設定することを特徴とする走査型プローブ顕微鏡。
【請求項8】
請求項6に記載の走査型プローブ顕微鏡において、
前記制御手段が、前記X走査データ列のうち直近に採取した2つ以上のX走査データ列の類似度を評価し、その類似度が所定のしきい値を下回る場合、一旦Y軸の走査方向を後戻りして、前回の移動量を前回より小さな距離に設定して、Y方向に走査しなおすことを特徴とする走査型プローブ顕微鏡。
【請求項9】
請求項6〜8のいずれか1項に記載の走査型プローブ顕微鏡において、
前記類似度が、複数のX走査データ列で対応するX座標のデータの差分を含む演算で評価されることを特徴とする走査型プローブ顕微鏡。
【請求項10】
請求項6〜8のいずれか1項に記載の走査型プローブ顕微鏡において、
前記類似度が、複数のX走査データ列の相互相関関数で評価されることを特徴とする走査型プローブ顕微鏡。
【請求項11】
試料表面に平行なXおよびY方向への走査移動と該試料表面に垂直なZ方向の移動とを該試料表面に対して相対的に行える探針と、
該探針が前記試料表面に近接または接触した時点において1種類以上の観測データを採取する観測手段と、
各観測位置の座標およびその位置での観測データを記憶する手段と、を備える走査型プローブ顕微鏡を用いた走査方法であって、
前記観測データを採取した後、前記XまたはY方向の次回の観測位置に達するまで前記試料表面に平行な方向に探針を走査移動させ、該走査中に前記探針が前記試料表面に近接または接触した際には、探針を試料表面からZ方向に離し移動させる工程と、
前記次回の観測位置に達した際には、探針の走査を停止するとともに、探針を試料表面に近接または接触させて前記観測データを採取する工程と、
前記観測データを複数の観測位置で採取し、採取した複数の観測データを用いて前記XまたはY方向の次回の観測位置を決定する工程と、を備えていることを特徴とする走査方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−157720(P2008−157720A)
【公開日】平成20年7月10日(2008.7.10)
【国際特許分類】
【出願番号】特願2006−345869(P2006−345869)
【出願日】平成18年12月22日(2006.12.22)
【出願人】(503460323)エスアイアイ・ナノテクノロジー株式会社 (330)
【Fターム(参考)】
【公開日】平成20年7月10日(2008.7.10)
【国際特許分類】
【出願日】平成18年12月22日(2006.12.22)
【出願人】(503460323)エスアイアイ・ナノテクノロジー株式会社 (330)
【Fターム(参考)】
[ Back to top ]