
走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラム
【課題】走査型プローブ顕微鏡の走査方法をコンピュータに実行させる指示を生成するプログラムにおいて、コンタクトモードの汎用性を維持しつつ、非接触モードやポイントコンタクトモードのように、常時探針と試料表面の接触を伴わない新たな走査方法を実施可能とするプログラムを提供する。
【解決手段】試料表面の測定点に対して、測定中のみ探針を試料表面に接触させその状態を維持し、かつ、測定信号の安定化を待ってデータ採取し、次の測定点への移動は探針を試料表面から所定の距離だけ離間させるようコンピュータに実行させる指示を生成するプログラムとした。
【解決手段】試料表面の測定点に対して、測定中のみ探針を試料表面に接触させその状態を維持し、かつ、測定信号の安定化を待ってデータ採取し、次の測定点への移動は探針を試料表面から所定の距離だけ離間させるようコンピュータに実行させる指示を生成するプログラムとした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、探針を試料表面で走査することで試料の表面形状や物性情報を観察することが可能な走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムに関するものである。
【背景技術】
【0002】
走査型プローブ顕微鏡は試料の表面形状や物性情報を測定する顕微鏡であり、これまでに様々な測定モードが提案されている。例えば、探針と試料間に流れるトンネル電流を一定に保つことで表面形状を取得する走査型トンネル顕微鏡(STM)や、探針と試料間の原子間力を検出することで表面形状を取得する原子間力顕微鏡(AFM)がある。AFMの中でも、カンチレバーの撓みを一定に保つことで表面形状を取得するコンタクトモードや、カンチレバーを励振させその振幅を一定に保つことで表面形状を取得するダイナミックフォースモード(DFM)がある。これらの測定モードでは、トンネル電流や原子間力等を常に一定になるように探針と試料間の距離を制御しながら、つまり常に一定距離に保ちながら探針を水平方向に移動させている。一方、カンチレバーを振動させながら探針を測定点のみで試料に近接させて水平方向に移動する際には探針を試料から離す測定方法も提案されている(特許文献1及び2参照)。
【0003】
一方、SPMでは試料の表面形状と同時に試料の物性情報を取得する物性測定が可能である。物性情報を取得する方法としては、探針を試料に接触させた状態で物性情報を取得する方法と、探針をある程度試料から離した状態で物性情報を取得する方法がある。前者では、コンタクトモードでの測定が一般的であり、例えば、探針と試料の間に電圧を印加し流れる電流を測定し、試料の電流値像を測定するコンダクティングAFM(電流測定AFM)等が挙げられ、この他にも強誘電体試料の分極状態を測定する圧電応答顕微鏡(PRM)があげられる。また、後者では試料表面の磁場分布等を測定する磁気力顕微鏡(MFM)等が挙げられる。(非特許文献1参照)
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−69851号公報
【特許文献2】特開平2−5340号公報
【非特許文献】
【0005】
【非特許文献1】山岡武博著、材料技術Vol.23No.4(2005)211
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述の特許文献1(カンチレバーを振動させながら探針を測定点のみで試料に近接させて測定)及び非特許文献1に記載の方法(探針を非接触で測定)では、測定可能な物性が制限されるため、機械物性や電気物性などはコンタクトモードでの測定によるしかないのが現状である。
【0007】
しかしならが、従来のコンタクトモードによる物性測定では、探針を試料に常に接触させた状態で水平方向に走査しているため、探針の磨耗や、試料の破壊が不可避であった。特に軟らかい試料は探針で試料を引掻いてしまい物性情報だけでなく表面形状も正確に測定できないとう問題点がある。
【0008】
また、物性情報の値は探針と試料との接触面積や接触圧力等の接触状態に大きく依存する。しかしながら、コンタクトモードでは常に探針が水平方向に移動するため接触状態が常に変化している。そのため測定している物性値が不安定になり、測定データの安定性・信頼性が悪く再現性も悪いという問題点がある。
【0009】
本発明の走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムは、このような従来の問題を解決しようとするもので、コンタクトモードの汎用性を維持しつつ、試料を破壊することなく、また、常に同じ接触状態で物性情報を取得し測定データの安定性・信頼性・再現性の向上を図ることができる走査型プローブ顕微鏡の走査をコンピュータに実行させる指示を生成するプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムは、探針と試料のうち少なくともいずれか一方をZ方向への移動指示により両者が接触するまで接近させる近接ステップと、探針と試料表面との接触後それらの間に作用する任意の物性に対応する測定を指示する測定ステップと、該測定ステップで測定している物性に対応する信号が安定するまで探針と試料表面の接触状態の維持を指示する接触状態維持ステップと、前記信号が安定したことを認知後直ちにその物性に対応した信号値と形状データの採取を指示するデータ採取ステップと、該信号値及び形状データ採取後直ちに探針を試料表面から一定距離だけZ方向に相対的に離間を指示する第一の離間ステップと、探針と試料の離間後に該探針を次の観察位置までXまたはY方向に移動を指示する移動ステップと、該移動ステップの際、前記探針と前記試料表面とが予め設定した距離以内に接近又は接触したことを検出した場合に該探針を該試料表面から一定距離引き離すことを指示する第二の離間ステップと、を含むコンピュータに実行させる指示を生成させることを特徴とするプログラムを提供する。
【発明の効果】
【0011】
本発明によれば、走査型プローブ顕微鏡の走査において、探針移動は試料表面から離間した状態で行なうにもかかわらず、物性測定時は探針を試料に接触させ、該接触状態を維持したまま物性に対応する信号を認知すると共に該信号が安定したと判断したら信号を取得後、探針を試料から離間して次の測定点に移動するようにコンピュータに実行させる指示を生成させることが可能である。従って、本発明は、広く諸物性の測定に対応が可能であるコンタクトモード法による応用性を維持しつつ、該方法における可決すべき課題の解決をなす走査方法を実施させえるプログラムである。よって、本発明に係わるプログラムは、探針と試料とを接触させた状態での物性測定において、試料を破壊することなく、また、常に同じ接触状態で物性情報を取得せしめるコンピュータに実行させる指示を生成せしめ、走査型プローブ顕微鏡の走査において、測定データの安定性・信頼性・再現性の向上を図ることができる走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムを提供できる。
【図面の簡単な説明】
【0012】
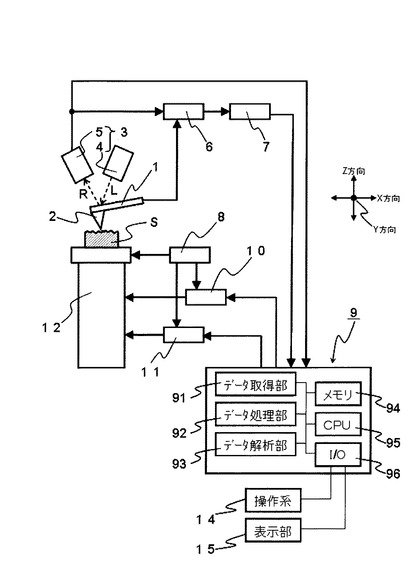
【図1】本発明のプログラムを実行させる走査型プローブ顕微鏡の全体を示す概略構成図である。
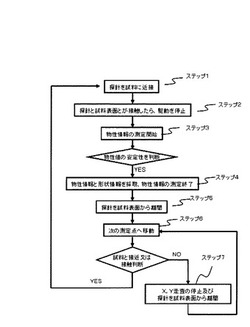
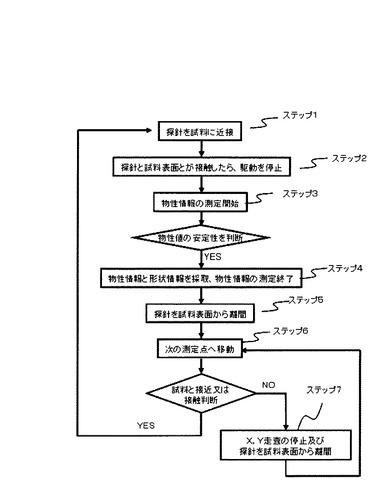
【図2】本発明の第一の実施例におけるプログラムの概要を示すフロー図である。
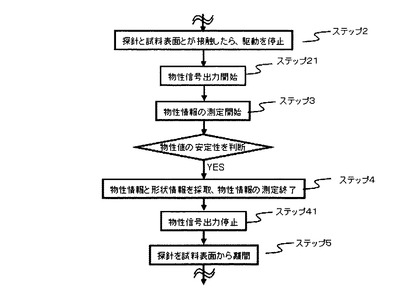
【図3】本発明の第二の実施例におけるプログラムの概要を示すフロー図である。
【図4】本発明の第三の実施例におけるプログラムの概要を示すフロー図である。
【図5】本発明の第四の実施例におけるプログラムの概要を示すフロー図である。
【図6】本発明の第五の実施例におけるプログラムの概要を示すフロー図である。
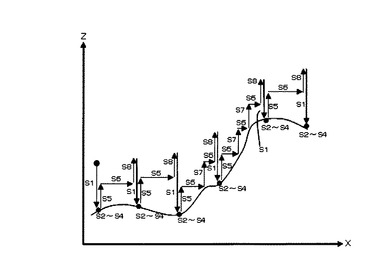
【図7】本発明の第一の実施例におけるプログラムによる探針の動作を示す概念図である。
【図8】本発明の第三の実施例におけるプログラムによる探針の動作を示す概念図である。
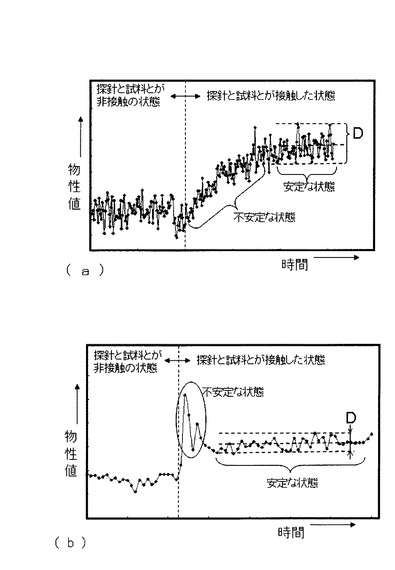
【図9】本発明における走査型プローブ顕微鏡による測定時の信号の安定及び不安定状態を示す概要図である。
【発明を実施するための形態】
【0013】
本発明の走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムについて、図を用いて説明する。
【0014】
図1には、本発明に係わるプログラムをコンピュータに実行させるための走査型プローブ顕微鏡のシステム構成の一例を概要的に示す。
【0015】
本発明に係わるプログラムに実効させるにあたり、試料台13の上に設置された試料の試料表面Sに対し針先が向かうように配置されるとともに、試料表面Sに平行なX,Y方向の走査と該試料表面Sに垂直なZ方向の移動とを該試料表面Sに対して相対的に行える探針2を有するカンチレバー1と、カンチレバー1の変位を検出するカンチレバー変位検出部3とを備えた走査型プローブ顕微鏡と、その動作指示を担う解析処理部9と、該解析処理部9を操作する操作系14及び測定状況や結果を表示する表示部15とから構成される。
【0016】
カンチレバー変位検出部3は、光源4と光検出器5とから構成されている。カンチレバー1の上面は反射面となっており、レーザー光Lが光源4からこの面に照射され、カンチレバー1の上面で反射された反射光Rは、光検出器5で検出される。光検出器5は例えば4分割フォトダイオードを用い、反射光Rが各フォトダイオードに入射して検出された検出信号の強度の差から、反射光Rの位置変化、つまりカンチレバー1の変位を検出することができる。
【0017】
試料台13は三次元アクチュエータ12に取付けられており、探針2と試料表面Sとを前記X,YおよびZ方向の相対的に移動させることが可能である。
【0018】
三次元アクチュエータ12には、三次元アクチュエータ12を駆動して試料表面SをX,Y,Z方向に走査させるXY駆動機構10とZ駆動機構11が接続されている。また、XY駆動機構10とZ駆動機構11は解析処理部9により制御される。
【0019】
物性測定部6は、カンチレバー1とカンチレバー変位検出部3とに接続されており、カンチレバー1とカンチレバー変位検出部3の少なくとも一方の信号から探針2と試料表面Sとの間に作用する物性情報を測定している。物性情報としては、例えば、試料表面の摩擦、粘弾性、吸着力、抵抗や静電容量や誘電率や分極状態等の電気特性、磁場分布等の磁気特性等である。これらの物性情報は、試料表面Sの物性状態によりカンチレバー1から得られる電気信号や、カンチレバー変位検出部3がカンチレバーの変位から測定することができるものである。
【0020】
解析処理部9は、データの蓄積・提供を行なうメモリ94、演算処理を行なうCPU95、インプット/アウトプットデバイス(I/O)96と、解析処理部9内へデータが送られると、メモリ94内に記録されたプログラムを実行することで機能的に形成されるデータ取得部91、データ処理部92、データ解析部93からなる。この解析処理部としては、コンピュータが利用でき、市販のパーソナルコンピュータやDSP(Digital Signal Processor)等がある。これらを用いる場合、操作部14は、キーボードやマウスなどの各種入力デバイスが利用できる。また、表示部15はモニターが利用できる。該解析処理部9は、メモリ94に記録したプログラムに従って、カンチレバー変位検出部3と物性測定部6からの信号を元に、試料表面Sの動きを制御している。解析処理部9において実行されたプログラムは、探針2と試料表面Sを接近させるZ方向に移動させ、探針2と試料表面Sが接触したら前記Z方向への移動を停止させ、試料表面Sと探針2との間に作用する物性情報の測定を開始させ、測定している物性値が安定したら直ちにその物性値と形状情報を採取すると共に探針2と試料表面Sとを引き離すZ方向へ移動させる指示を生成する。そして、前記プログラムは、次回の観察位置に達するまで探針2と試料表面SとをX,Y方向に走査させ、該走査中に探針2と試料表面Sが接近又は接触したことを検出した際に該走査を一旦停止すると共に、探針2と試料表面Sとを引き離すZ方向に移動させた後、該走査を再び続行する指示を生成する。また、該プログラムは、探針2と試料表面Sとを接触させ物性情報を測定している間は、探針2と試料表面Sとの接触状態が所定の状態で維持する指示を生成する。ここで、測定している物性値が安定してから物性値を採取するよう指示を生成するが、これに限らず、物性情報の測定を開始してからあらかじめ設定した時間経過した後の物性値を採取させるよう指示を生成しても良い。なお、探針2と試料表面Sとを引き離す距離は、あらかじめ該距離を設定しておくことや、あるいは、カンチレバー1の変位が元の状態に戻るまでと指定してもよい。
【0021】
カンチレバー変位検出部3の情報は、解析処理部9により取得し、フィーバックループの中でXY駆動機構10及びZ駆動機構11を作動させて探針2と試料Sとの距離制御を行なう。また、データ採取指令部7において、測定信号が安定したことの確認やデータ採取の指令についても解析処理部9からの指示をトリガーとして実行される。
【0022】
本発明に係わるプログラムの実行により蓄積されるデータは、解析処理された後、メモリ94の一部に蓄積される。
【実施例1】
【0023】
次に、本発明のプログラムによる走査型プローブ顕微鏡の具体的な走査指示について、試料表面Sの表面形状および物性情報を採取する例について図2および図7を参照して説明する。
【0024】
図2は本実施形態におけるプログラムの概要を示すものであり、試料表面Sの表面形状および物性情報を生成する過程の一例を示すフローチャートである。また、図7は本実施形態におけるプログラムによる探針2の動作を示す概念図である。
【0025】
まず、ステップ1として、プログラムは、三次元アクチュエータ12を駆動させ、探針2と試料表面Sとを近づけるZ方向へ移動させる指示する。このとき、本実施形態ではX,Y方向へは走査していない。
【0026】
次に、ステップ2にいてプログラムは、探針2と試料表面Sとが接近または接触を検出したら、三次元アクチュエータ12を停止させるよう指示する。ここで、探針2と試料表面Sとが接近または接触の検出は、解析処理部9において、カンチレバー1の変位としてカンチレバー変位検出手段3にて検出した変位と予め解析処理部9に登録した値とを比較して判断する。
【0027】
次に、ステップ3においてプログラムは、探針2と試料表面Sとの間に作用する物性情報の測定を開始の指示をする。測定している物性値が安定したらステップ4に進む。物性値は探針を試料表面に接触させた直後は非常に不安定であり、不安定な状態のままでの物性値の測定データ採取は該測定データの信頼性・再現性に劣るためである。
【0028】
ここで、「物性値が安定」との状態について、図9を用いて説明する。図9(a)は、探針と試料表面とが接触した後に、測定している物性値が徐々に大きくなった後に安定している。また、図9(b)は、探針と試料表面とが接触した直後は物性値が大きく変化しており不安定な状態であり、その後安定している。物性値が安定したか否かの判断としては、測定している物性値の変化値があらかじめ設定した値(D)以内に収まるまでとする。なお、物性値の変化値ではなく、時間微分した値を用いて判断しても良い。
【0029】
次に、ステップ4においてプログラムは、物性情報と形状情報を採取すると共に、該採取後はステップ3で開始した物性情報の測定を停止するよう指示する。ここで、物性情報を測定している間、すなわちステップ3からステップ4までの間プログラムは、探針2と試料表面Sとが同じ接触状態が維持されるように指示し、探針2と試料表面SのZ方向の移動が制御される。ここで、「同じ接触状態」とは、カンチレバー1の変位があらかじめ設定した値になることを言う。
【0030】
次に、ステップ5においてプログラムは、探針2と試料表面Sを引き離すZ方向へ移動するよう指示する。なお、探針2と試料表面Sとを引き離す距離は、あらかじめ設定した距離でもよく、あるいは、カンチレバー1の変位が元の状態に戻るまででも良い。なお、ステップ4とステップ5を同時に行っても良い。
【0031】
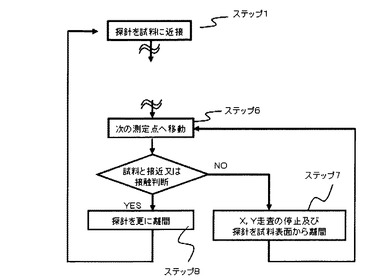
次に、ステップ6においてプログラムは、次の観察位置まで到達するように探針2と試料表面SをX,Y方向へと走査させる。そして、ステップ6後の探針2と試料表面Sが予め設定した距離以内に接近又は接触の有無の判断においてプログラムは、それらがなければ「YES」へ進んで、再び近接ステップ(ステップ1)へ進むよう指示する。当該判断において、探針と試料の所定の距離なの近接又は接触があれば、「NO」側のステップ7へと進むよう指示する。
【0032】
ステップ7においてプログラムは、X,Y方向への走査を停止させると共に、探針2と試料表面SとをZ方向へ離間するよう指示する。なお、探針2と試料表面Sとを離間する距離は、あらかじめ設定した距離でもよく、あるいは、カンチレバー1の変位が元の状態に戻るまででも良い。ステップ7の工程終了後は、ステップ6へと進む。このようにして、プログラムは、次の観察位置に到達するまでステップ6とステップ7を繰り返し、次の観察位置に到達したらステップ1へ進み、新しい観察位置での測定を実施させる。
【0033】
このように、本発明に係わるプログラムのステップ1からステップ7を繰り返すことによって、各観察位置で形状情報と物性情報を採取し、試料表面Sの表面形状と物性情報を得ることができる。
【0034】
本発明の走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムでは、探針2と試料表面Sは接触した状態でX,Y方向へ走査させることが無いので、探針2が試料表面Sを引掻くことを回避できる。従来技術では、試料表面の表面形状や物性情報を取得する際、探針が試料を引掻くと、正確な情報を得ることができなかったが、本発明に係わるプログラムによれば、試料を引掻くことが無く、正確な表面形状と物性情報を取得することが可能である。また、結果として試料表面Sや探針2の磨耗を減少させ得る。
【0035】
また、本発明のプログラムでは、物性情報を取得している間、探針2と試料表面Sが同じ接触状態になうように維持するように指示を行う。一般に、試料表面と探針間に作用する物性情報は探針と試料表面の接触状態に大きく依存する。従来技術では物性情報を測定する際、X,Y方向へ走査させながら測定しているので、どうしても接触状態は変化してしまうが、本発明のプログラムによれば、物性情報を測定している最中は接触状態を一定になるよう維持させるため、より安定した測定が可能である。また、探針と試料表面とが接触した直後は測定している物性値が不安定になることがあるが、本発明に係わるプログラムによれば、安定するまで待ち時間を設けているため、より安定した測定が可能である。この様に、本発明に係わるプログラムは、測定時の探針は測定完了まで接触状態を維持させる指示を行なうため、従来のコンタクトモードと同様の汎用性を維持することができる。
【0036】
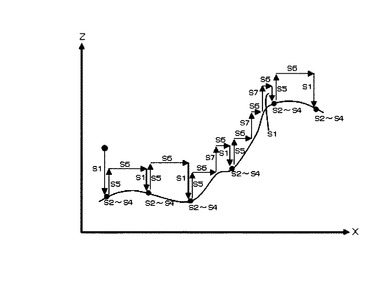
図7では便宜上、「ステップ1」を「S1」と表示しており、ステップ2からステップ7も同様である。また、図7では、探針2の動作をXZ平面であらわしているが、これに限らず、例えばYZ平面でも良い。また、図7では、ステップ1(S1)とステップ5(S5)のX方向の位置が異なっているが、これは図を簡略化したためであり、実際の動作では探針2のXY方向の位置は同じである。
【実施例2】
【0037】
次に、本発明の第二の実施例について図3を用いて説明する。なお、図3の二重波線前後は、図2の該当部と同様でるので省略した。
【0038】
第二の実施例と第一の実施例とは、本発明に係わるプログラムが、第一の実施例では探針2と試料表面Sが接触した後にステップ3で物性情報の測定開始を指示するのに対し、第二の実施例では物性を測定するための電気信号の出力を開始するステップ(ステップ21)及びステップ4で物性情報の測定終了後に前記電気信号の出力を終了させるステップ(ステップ41)を含む点において異なる。
【0039】
ここで、「物性を測定するための電気信号」とは、試料台13に直接電圧を印加するための信号や、三次元アクチュエータ12に電気信号を印加することにより、試料表面SをX,Y,Z方向の少なくとも1方向に振動または変位させる信号である。これにより、試料表面の摩擦、粘弾性、吸着力、抵抗や静電容量や誘電率や分極状態等の電気特性、磁場分布等の磁気特性等を測定することが可能となる。
【実施例3】
【0040】
次に、本発明による第三の実施例について、図4及び8を用いて説明する。なお、図4の二重波線間は、図2の該当部と同様でるので省略した。
【0041】
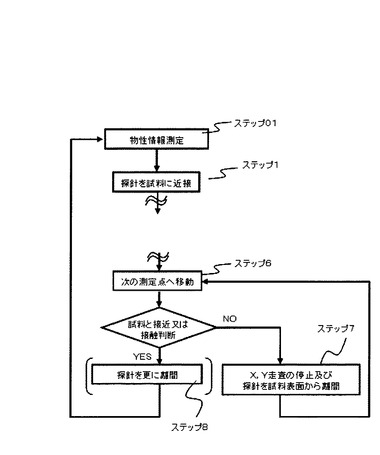
第三の実施例と第一の実施例とは、本発明に係わるプログラムが、第一の実施例ではステップ6により次の観察位置に到達するとステップ1の探針2と試料表面Sとの近接ステップへ進む指示であるのに対し、第三の実施例ではステップ6により次の観察位置に到達した後、更に所定の距離だけ探針2を試料表面Sから離間するようにZ方向に移動する第三の離間ステップ(ステップ8)を経て、近接ステップへ進む点において異なる。
【0042】
ステップ1により探針2をと試料表面Sとを接近させる前に、一旦離間させることにより、探針2と試料表面Sとを確実に非接触状態にすることが可能である。これは、試料表面と探針2との間に大きな吸着力が働いている場合、第一の離間工程(ステップ5)で探針2と試料表面Sとを引き離しても吸着力により非接触状態にならない事態に対応するためである。
【実施例4】
【0043】
次に、本発明による第四の実施例について、図5を用いて説明する。なお、図5の二重波線間は、図2の該当部と同様でるので省略した。
【0044】
本発明に係わるプログラムは、ステップ1で探針2と試料表面Sとを接近させる前に、もしくはステップ8で探針2と試料表面Sとを引き離した後に、その位置において、探針2と試料表面Sとの間に作用する物性情報を測定し採取するよう指示するステップ(ステップ01)を有する。これにより、試料表面と試料表面からある距離だけ離れた位置での物性情報を測定することが可能となるため、より多面的な試料表面の観察及びデータ採取を行わせることができる。なお、ステップ01では試料表面から離れた位置で物性情報を測定しているので、磁場分布等の非接触状態で計測できる物性情報の取得を想定しており、ステップ4で採取する探針と試料表面とが接触状態で測定できる物性情報と共に、探針を非接触及び接触の両方の測定態様に適応させることが可能である。なお、非接触状態で物性情報を測定するために、ステップ01で物性測定を行っている間のみカンチレバーを励振するように指示しても良い。
【実施例5】
【0045】
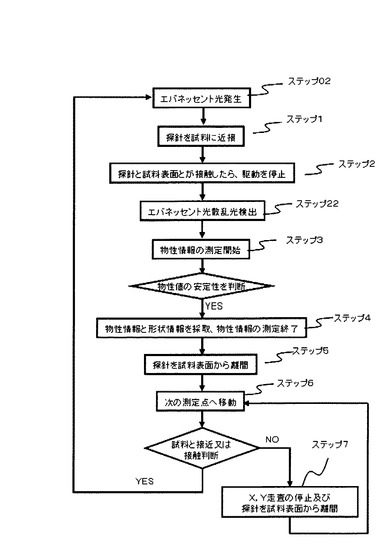
次に、本発明による第五の実施例について、図6を用いて説明する。
本発明に係わるプログラムが、ステップ1で探針2と試料表面Sとを接近させる前に、試料表面Sまたは探針2にエバネッセント場を発生させるステップ(ステップ02)と、ステップ2により試料表面Sと探針2が接触した後に散乱光を検出するステップ(ステップ22)を含むことで、散乱光を検出する近接顕微鏡にも適応できる。一般に近接顕微鏡の場合には、探針と試料表面間の距離が近いほど検出する信号強度が強く、探針2と試料表面Sとを接触させて散乱光を検出することでS/N比を向上させることができる。よって、本発明に係わるプログラムは、該散乱光の検出を行う際、接触時の信号のみを選択的に検出するように指示することが望ましい。
【0046】
なお、本発明の技術範囲は、上記実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、種々の変更を加えることが可能である。
【0047】
例えば、上記各実施例においてプログラムは、試料台13を三次元アクチュエータ12により駆動させているが、これに限らず、探針と試料表面とが相対的に動けばよいのであって、例えば、探針2を三次元アクチュエータ12により駆動させるよう指示しても良い。また、三次元アクチュエータ12を一体のものとしたが、これに限らず、プログラムは、3個のアクチュエータによりそれぞれX,Y,Z方向用にそれぞれ個別に設けた駆動機構を指示制御しても良い。
【0048】
また、プログラムは、光検出器5として4分割光フォトダイオードを制御したが、これに限らず、例えば、2分割光フォトダイオードでも良い。また、カンチレバーの変位検出部3として光源4と光検出器5を制御したが、カンチレバーの変位を検出できれば良いのであって、例えばピエゾ抵抗型の自己検知カンチレバーを用いて制御しても良い。
また、測定する物性情報は、一種類以上の物性を測定するよう指示しても良い。
【符号の説明】
【0049】
1 ・・・カンチレバー
2 ・・・探針
3 ・・・カンチレバー変位検出部
4 ・・・光源
5 ・・・光検出器
6 ・・・物性測定部
7 ・・・データ採取指令部
8 ・・・物性測定用電気信号発生部
9 ・・・解析処理部
10 ・・・XY駆動機構
11 ・・・Z駆動機構
12 ・・・三次元アクチュエータ
13 ・・・試料台
14 ・・・操作部
15 ・・・表示部
L ・・・レーザー光
R ・・・反射光
S ・・・試料
【技術分野】
【0001】
本発明は、探針を試料表面で走査することで試料の表面形状や物性情報を観察することが可能な走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムに関するものである。
【背景技術】
【0002】
走査型プローブ顕微鏡は試料の表面形状や物性情報を測定する顕微鏡であり、これまでに様々な測定モードが提案されている。例えば、探針と試料間に流れるトンネル電流を一定に保つことで表面形状を取得する走査型トンネル顕微鏡(STM)や、探針と試料間の原子間力を検出することで表面形状を取得する原子間力顕微鏡(AFM)がある。AFMの中でも、カンチレバーの撓みを一定に保つことで表面形状を取得するコンタクトモードや、カンチレバーを励振させその振幅を一定に保つことで表面形状を取得するダイナミックフォースモード(DFM)がある。これらの測定モードでは、トンネル電流や原子間力等を常に一定になるように探針と試料間の距離を制御しながら、つまり常に一定距離に保ちながら探針を水平方向に移動させている。一方、カンチレバーを振動させながら探針を測定点のみで試料に近接させて水平方向に移動する際には探針を試料から離す測定方法も提案されている(特許文献1及び2参照)。
【0003】
一方、SPMでは試料の表面形状と同時に試料の物性情報を取得する物性測定が可能である。物性情報を取得する方法としては、探針を試料に接触させた状態で物性情報を取得する方法と、探針をある程度試料から離した状態で物性情報を取得する方法がある。前者では、コンタクトモードでの測定が一般的であり、例えば、探針と試料の間に電圧を印加し流れる電流を測定し、試料の電流値像を測定するコンダクティングAFM(電流測定AFM)等が挙げられ、この他にも強誘電体試料の分極状態を測定する圧電応答顕微鏡(PRM)があげられる。また、後者では試料表面の磁場分布等を測定する磁気力顕微鏡(MFM)等が挙げられる。(非特許文献1参照)
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−69851号公報
【特許文献2】特開平2−5340号公報
【非特許文献】
【0005】
【非特許文献1】山岡武博著、材料技術Vol.23No.4(2005)211
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述の特許文献1(カンチレバーを振動させながら探針を測定点のみで試料に近接させて測定)及び非特許文献1に記載の方法(探針を非接触で測定)では、測定可能な物性が制限されるため、機械物性や電気物性などはコンタクトモードでの測定によるしかないのが現状である。
【0007】
しかしならが、従来のコンタクトモードによる物性測定では、探針を試料に常に接触させた状態で水平方向に走査しているため、探針の磨耗や、試料の破壊が不可避であった。特に軟らかい試料は探針で試料を引掻いてしまい物性情報だけでなく表面形状も正確に測定できないとう問題点がある。
【0008】
また、物性情報の値は探針と試料との接触面積や接触圧力等の接触状態に大きく依存する。しかしながら、コンタクトモードでは常に探針が水平方向に移動するため接触状態が常に変化している。そのため測定している物性値が不安定になり、測定データの安定性・信頼性が悪く再現性も悪いという問題点がある。
【0009】
本発明の走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムは、このような従来の問題を解決しようとするもので、コンタクトモードの汎用性を維持しつつ、試料を破壊することなく、また、常に同じ接触状態で物性情報を取得し測定データの安定性・信頼性・再現性の向上を図ることができる走査型プローブ顕微鏡の走査をコンピュータに実行させる指示を生成するプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムは、探針と試料のうち少なくともいずれか一方をZ方向への移動指示により両者が接触するまで接近させる近接ステップと、探針と試料表面との接触後それらの間に作用する任意の物性に対応する測定を指示する測定ステップと、該測定ステップで測定している物性に対応する信号が安定するまで探針と試料表面の接触状態の維持を指示する接触状態維持ステップと、前記信号が安定したことを認知後直ちにその物性に対応した信号値と形状データの採取を指示するデータ採取ステップと、該信号値及び形状データ採取後直ちに探針を試料表面から一定距離だけZ方向に相対的に離間を指示する第一の離間ステップと、探針と試料の離間後に該探針を次の観察位置までXまたはY方向に移動を指示する移動ステップと、該移動ステップの際、前記探針と前記試料表面とが予め設定した距離以内に接近又は接触したことを検出した場合に該探針を該試料表面から一定距離引き離すことを指示する第二の離間ステップと、を含むコンピュータに実行させる指示を生成させることを特徴とするプログラムを提供する。
【発明の効果】
【0011】
本発明によれば、走査型プローブ顕微鏡の走査において、探針移動は試料表面から離間した状態で行なうにもかかわらず、物性測定時は探針を試料に接触させ、該接触状態を維持したまま物性に対応する信号を認知すると共に該信号が安定したと判断したら信号を取得後、探針を試料から離間して次の測定点に移動するようにコンピュータに実行させる指示を生成させることが可能である。従って、本発明は、広く諸物性の測定に対応が可能であるコンタクトモード法による応用性を維持しつつ、該方法における可決すべき課題の解決をなす走査方法を実施させえるプログラムである。よって、本発明に係わるプログラムは、探針と試料とを接触させた状態での物性測定において、試料を破壊することなく、また、常に同じ接触状態で物性情報を取得せしめるコンピュータに実行させる指示を生成せしめ、走査型プローブ顕微鏡の走査において、測定データの安定性・信頼性・再現性の向上を図ることができる走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムを提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明のプログラムを実行させる走査型プローブ顕微鏡の全体を示す概略構成図である。
【図2】本発明の第一の実施例におけるプログラムの概要を示すフロー図である。
【図3】本発明の第二の実施例におけるプログラムの概要を示すフロー図である。
【図4】本発明の第三の実施例におけるプログラムの概要を示すフロー図である。
【図5】本発明の第四の実施例におけるプログラムの概要を示すフロー図である。
【図6】本発明の第五の実施例におけるプログラムの概要を示すフロー図である。
【図7】本発明の第一の実施例におけるプログラムによる探針の動作を示す概念図である。
【図8】本発明の第三の実施例におけるプログラムによる探針の動作を示す概念図である。
【図9】本発明における走査型プローブ顕微鏡による測定時の信号の安定及び不安定状態を示す概要図である。
【発明を実施するための形態】
【0013】
本発明の走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムについて、図を用いて説明する。
【0014】
図1には、本発明に係わるプログラムをコンピュータに実行させるための走査型プローブ顕微鏡のシステム構成の一例を概要的に示す。
【0015】
本発明に係わるプログラムに実効させるにあたり、試料台13の上に設置された試料の試料表面Sに対し針先が向かうように配置されるとともに、試料表面Sに平行なX,Y方向の走査と該試料表面Sに垂直なZ方向の移動とを該試料表面Sに対して相対的に行える探針2を有するカンチレバー1と、カンチレバー1の変位を検出するカンチレバー変位検出部3とを備えた走査型プローブ顕微鏡と、その動作指示を担う解析処理部9と、該解析処理部9を操作する操作系14及び測定状況や結果を表示する表示部15とから構成される。
【0016】
カンチレバー変位検出部3は、光源4と光検出器5とから構成されている。カンチレバー1の上面は反射面となっており、レーザー光Lが光源4からこの面に照射され、カンチレバー1の上面で反射された反射光Rは、光検出器5で検出される。光検出器5は例えば4分割フォトダイオードを用い、反射光Rが各フォトダイオードに入射して検出された検出信号の強度の差から、反射光Rの位置変化、つまりカンチレバー1の変位を検出することができる。
【0017】
試料台13は三次元アクチュエータ12に取付けられており、探針2と試料表面Sとを前記X,YおよびZ方向の相対的に移動させることが可能である。
【0018】
三次元アクチュエータ12には、三次元アクチュエータ12を駆動して試料表面SをX,Y,Z方向に走査させるXY駆動機構10とZ駆動機構11が接続されている。また、XY駆動機構10とZ駆動機構11は解析処理部9により制御される。
【0019】
物性測定部6は、カンチレバー1とカンチレバー変位検出部3とに接続されており、カンチレバー1とカンチレバー変位検出部3の少なくとも一方の信号から探針2と試料表面Sとの間に作用する物性情報を測定している。物性情報としては、例えば、試料表面の摩擦、粘弾性、吸着力、抵抗や静電容量や誘電率や分極状態等の電気特性、磁場分布等の磁気特性等である。これらの物性情報は、試料表面Sの物性状態によりカンチレバー1から得られる電気信号や、カンチレバー変位検出部3がカンチレバーの変位から測定することができるものである。
【0020】
解析処理部9は、データの蓄積・提供を行なうメモリ94、演算処理を行なうCPU95、インプット/アウトプットデバイス(I/O)96と、解析処理部9内へデータが送られると、メモリ94内に記録されたプログラムを実行することで機能的に形成されるデータ取得部91、データ処理部92、データ解析部93からなる。この解析処理部としては、コンピュータが利用でき、市販のパーソナルコンピュータやDSP(Digital Signal Processor)等がある。これらを用いる場合、操作部14は、キーボードやマウスなどの各種入力デバイスが利用できる。また、表示部15はモニターが利用できる。該解析処理部9は、メモリ94に記録したプログラムに従って、カンチレバー変位検出部3と物性測定部6からの信号を元に、試料表面Sの動きを制御している。解析処理部9において実行されたプログラムは、探針2と試料表面Sを接近させるZ方向に移動させ、探針2と試料表面Sが接触したら前記Z方向への移動を停止させ、試料表面Sと探針2との間に作用する物性情報の測定を開始させ、測定している物性値が安定したら直ちにその物性値と形状情報を採取すると共に探針2と試料表面Sとを引き離すZ方向へ移動させる指示を生成する。そして、前記プログラムは、次回の観察位置に達するまで探針2と試料表面SとをX,Y方向に走査させ、該走査中に探針2と試料表面Sが接近又は接触したことを検出した際に該走査を一旦停止すると共に、探針2と試料表面Sとを引き離すZ方向に移動させた後、該走査を再び続行する指示を生成する。また、該プログラムは、探針2と試料表面Sとを接触させ物性情報を測定している間は、探針2と試料表面Sとの接触状態が所定の状態で維持する指示を生成する。ここで、測定している物性値が安定してから物性値を採取するよう指示を生成するが、これに限らず、物性情報の測定を開始してからあらかじめ設定した時間経過した後の物性値を採取させるよう指示を生成しても良い。なお、探針2と試料表面Sとを引き離す距離は、あらかじめ該距離を設定しておくことや、あるいは、カンチレバー1の変位が元の状態に戻るまでと指定してもよい。
【0021】
カンチレバー変位検出部3の情報は、解析処理部9により取得し、フィーバックループの中でXY駆動機構10及びZ駆動機構11を作動させて探針2と試料Sとの距離制御を行なう。また、データ採取指令部7において、測定信号が安定したことの確認やデータ採取の指令についても解析処理部9からの指示をトリガーとして実行される。
【0022】
本発明に係わるプログラムの実行により蓄積されるデータは、解析処理された後、メモリ94の一部に蓄積される。
【実施例1】
【0023】
次に、本発明のプログラムによる走査型プローブ顕微鏡の具体的な走査指示について、試料表面Sの表面形状および物性情報を採取する例について図2および図7を参照して説明する。
【0024】
図2は本実施形態におけるプログラムの概要を示すものであり、試料表面Sの表面形状および物性情報を生成する過程の一例を示すフローチャートである。また、図7は本実施形態におけるプログラムによる探針2の動作を示す概念図である。
【0025】
まず、ステップ1として、プログラムは、三次元アクチュエータ12を駆動させ、探針2と試料表面Sとを近づけるZ方向へ移動させる指示する。このとき、本実施形態ではX,Y方向へは走査していない。
【0026】
次に、ステップ2にいてプログラムは、探針2と試料表面Sとが接近または接触を検出したら、三次元アクチュエータ12を停止させるよう指示する。ここで、探針2と試料表面Sとが接近または接触の検出は、解析処理部9において、カンチレバー1の変位としてカンチレバー変位検出手段3にて検出した変位と予め解析処理部9に登録した値とを比較して判断する。
【0027】
次に、ステップ3においてプログラムは、探針2と試料表面Sとの間に作用する物性情報の測定を開始の指示をする。測定している物性値が安定したらステップ4に進む。物性値は探針を試料表面に接触させた直後は非常に不安定であり、不安定な状態のままでの物性値の測定データ採取は該測定データの信頼性・再現性に劣るためである。
【0028】
ここで、「物性値が安定」との状態について、図9を用いて説明する。図9(a)は、探針と試料表面とが接触した後に、測定している物性値が徐々に大きくなった後に安定している。また、図9(b)は、探針と試料表面とが接触した直後は物性値が大きく変化しており不安定な状態であり、その後安定している。物性値が安定したか否かの判断としては、測定している物性値の変化値があらかじめ設定した値(D)以内に収まるまでとする。なお、物性値の変化値ではなく、時間微分した値を用いて判断しても良い。
【0029】
次に、ステップ4においてプログラムは、物性情報と形状情報を採取すると共に、該採取後はステップ3で開始した物性情報の測定を停止するよう指示する。ここで、物性情報を測定している間、すなわちステップ3からステップ4までの間プログラムは、探針2と試料表面Sとが同じ接触状態が維持されるように指示し、探針2と試料表面SのZ方向の移動が制御される。ここで、「同じ接触状態」とは、カンチレバー1の変位があらかじめ設定した値になることを言う。
【0030】
次に、ステップ5においてプログラムは、探針2と試料表面Sを引き離すZ方向へ移動するよう指示する。なお、探針2と試料表面Sとを引き離す距離は、あらかじめ設定した距離でもよく、あるいは、カンチレバー1の変位が元の状態に戻るまででも良い。なお、ステップ4とステップ5を同時に行っても良い。
【0031】
次に、ステップ6においてプログラムは、次の観察位置まで到達するように探針2と試料表面SをX,Y方向へと走査させる。そして、ステップ6後の探針2と試料表面Sが予め設定した距離以内に接近又は接触の有無の判断においてプログラムは、それらがなければ「YES」へ進んで、再び近接ステップ(ステップ1)へ進むよう指示する。当該判断において、探針と試料の所定の距離なの近接又は接触があれば、「NO」側のステップ7へと進むよう指示する。
【0032】
ステップ7においてプログラムは、X,Y方向への走査を停止させると共に、探針2と試料表面SとをZ方向へ離間するよう指示する。なお、探針2と試料表面Sとを離間する距離は、あらかじめ設定した距離でもよく、あるいは、カンチレバー1の変位が元の状態に戻るまででも良い。ステップ7の工程終了後は、ステップ6へと進む。このようにして、プログラムは、次の観察位置に到達するまでステップ6とステップ7を繰り返し、次の観察位置に到達したらステップ1へ進み、新しい観察位置での測定を実施させる。
【0033】
このように、本発明に係わるプログラムのステップ1からステップ7を繰り返すことによって、各観察位置で形状情報と物性情報を採取し、試料表面Sの表面形状と物性情報を得ることができる。
【0034】
本発明の走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムでは、探針2と試料表面Sは接触した状態でX,Y方向へ走査させることが無いので、探針2が試料表面Sを引掻くことを回避できる。従来技術では、試料表面の表面形状や物性情報を取得する際、探針が試料を引掻くと、正確な情報を得ることができなかったが、本発明に係わるプログラムによれば、試料を引掻くことが無く、正確な表面形状と物性情報を取得することが可能である。また、結果として試料表面Sや探針2の磨耗を減少させ得る。
【0035】
また、本発明のプログラムでは、物性情報を取得している間、探針2と試料表面Sが同じ接触状態になうように維持するように指示を行う。一般に、試料表面と探針間に作用する物性情報は探針と試料表面の接触状態に大きく依存する。従来技術では物性情報を測定する際、X,Y方向へ走査させながら測定しているので、どうしても接触状態は変化してしまうが、本発明のプログラムによれば、物性情報を測定している最中は接触状態を一定になるよう維持させるため、より安定した測定が可能である。また、探針と試料表面とが接触した直後は測定している物性値が不安定になることがあるが、本発明に係わるプログラムによれば、安定するまで待ち時間を設けているため、より安定した測定が可能である。この様に、本発明に係わるプログラムは、測定時の探針は測定完了まで接触状態を維持させる指示を行なうため、従来のコンタクトモードと同様の汎用性を維持することができる。
【0036】
図7では便宜上、「ステップ1」を「S1」と表示しており、ステップ2からステップ7も同様である。また、図7では、探針2の動作をXZ平面であらわしているが、これに限らず、例えばYZ平面でも良い。また、図7では、ステップ1(S1)とステップ5(S5)のX方向の位置が異なっているが、これは図を簡略化したためであり、実際の動作では探針2のXY方向の位置は同じである。
【実施例2】
【0037】
次に、本発明の第二の実施例について図3を用いて説明する。なお、図3の二重波線前後は、図2の該当部と同様でるので省略した。
【0038】
第二の実施例と第一の実施例とは、本発明に係わるプログラムが、第一の実施例では探針2と試料表面Sが接触した後にステップ3で物性情報の測定開始を指示するのに対し、第二の実施例では物性を測定するための電気信号の出力を開始するステップ(ステップ21)及びステップ4で物性情報の測定終了後に前記電気信号の出力を終了させるステップ(ステップ41)を含む点において異なる。
【0039】
ここで、「物性を測定するための電気信号」とは、試料台13に直接電圧を印加するための信号や、三次元アクチュエータ12に電気信号を印加することにより、試料表面SをX,Y,Z方向の少なくとも1方向に振動または変位させる信号である。これにより、試料表面の摩擦、粘弾性、吸着力、抵抗や静電容量や誘電率や分極状態等の電気特性、磁場分布等の磁気特性等を測定することが可能となる。
【実施例3】
【0040】
次に、本発明による第三の実施例について、図4及び8を用いて説明する。なお、図4の二重波線間は、図2の該当部と同様でるので省略した。
【0041】
第三の実施例と第一の実施例とは、本発明に係わるプログラムが、第一の実施例ではステップ6により次の観察位置に到達するとステップ1の探針2と試料表面Sとの近接ステップへ進む指示であるのに対し、第三の実施例ではステップ6により次の観察位置に到達した後、更に所定の距離だけ探針2を試料表面Sから離間するようにZ方向に移動する第三の離間ステップ(ステップ8)を経て、近接ステップへ進む点において異なる。
【0042】
ステップ1により探針2をと試料表面Sとを接近させる前に、一旦離間させることにより、探針2と試料表面Sとを確実に非接触状態にすることが可能である。これは、試料表面と探針2との間に大きな吸着力が働いている場合、第一の離間工程(ステップ5)で探針2と試料表面Sとを引き離しても吸着力により非接触状態にならない事態に対応するためである。
【実施例4】
【0043】
次に、本発明による第四の実施例について、図5を用いて説明する。なお、図5の二重波線間は、図2の該当部と同様でるので省略した。
【0044】
本発明に係わるプログラムは、ステップ1で探針2と試料表面Sとを接近させる前に、もしくはステップ8で探針2と試料表面Sとを引き離した後に、その位置において、探針2と試料表面Sとの間に作用する物性情報を測定し採取するよう指示するステップ(ステップ01)を有する。これにより、試料表面と試料表面からある距離だけ離れた位置での物性情報を測定することが可能となるため、より多面的な試料表面の観察及びデータ採取を行わせることができる。なお、ステップ01では試料表面から離れた位置で物性情報を測定しているので、磁場分布等の非接触状態で計測できる物性情報の取得を想定しており、ステップ4で採取する探針と試料表面とが接触状態で測定できる物性情報と共に、探針を非接触及び接触の両方の測定態様に適応させることが可能である。なお、非接触状態で物性情報を測定するために、ステップ01で物性測定を行っている間のみカンチレバーを励振するように指示しても良い。
【実施例5】
【0045】
次に、本発明による第五の実施例について、図6を用いて説明する。
本発明に係わるプログラムが、ステップ1で探針2と試料表面Sとを接近させる前に、試料表面Sまたは探針2にエバネッセント場を発生させるステップ(ステップ02)と、ステップ2により試料表面Sと探針2が接触した後に散乱光を検出するステップ(ステップ22)を含むことで、散乱光を検出する近接顕微鏡にも適応できる。一般に近接顕微鏡の場合には、探針と試料表面間の距離が近いほど検出する信号強度が強く、探針2と試料表面Sとを接触させて散乱光を検出することでS/N比を向上させることができる。よって、本発明に係わるプログラムは、該散乱光の検出を行う際、接触時の信号のみを選択的に検出するように指示することが望ましい。
【0046】
なお、本発明の技術範囲は、上記実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、種々の変更を加えることが可能である。
【0047】
例えば、上記各実施例においてプログラムは、試料台13を三次元アクチュエータ12により駆動させているが、これに限らず、探針と試料表面とが相対的に動けばよいのであって、例えば、探針2を三次元アクチュエータ12により駆動させるよう指示しても良い。また、三次元アクチュエータ12を一体のものとしたが、これに限らず、プログラムは、3個のアクチュエータによりそれぞれX,Y,Z方向用にそれぞれ個別に設けた駆動機構を指示制御しても良い。
【0048】
また、プログラムは、光検出器5として4分割光フォトダイオードを制御したが、これに限らず、例えば、2分割光フォトダイオードでも良い。また、カンチレバーの変位検出部3として光源4と光検出器5を制御したが、カンチレバーの変位を検出できれば良いのであって、例えばピエゾ抵抗型の自己検知カンチレバーを用いて制御しても良い。
また、測定する物性情報は、一種類以上の物性を測定するよう指示しても良い。
【符号の説明】
【0049】
1 ・・・カンチレバー
2 ・・・探針
3 ・・・カンチレバー変位検出部
4 ・・・光源
5 ・・・光検出器
6 ・・・物性測定部
7 ・・・データ採取指令部
8 ・・・物性測定用電気信号発生部
9 ・・・解析処理部
10 ・・・XY駆動機構
11 ・・・Z駆動機構
12 ・・・三次元アクチュエータ
13 ・・・試料台
14 ・・・操作部
15 ・・・表示部
L ・・・レーザー光
R ・・・反射光
S ・・・試料
【特許請求の範囲】
【請求項1】
カンチレバーの先端に備わる探針により試料表面の走査を行い当該試料の任意の物性に対応した信号を検出することで当該物性の測定を行う走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムであって、
前記探針と前記試料のうち少なくともいずれか一方をZ方向移動指示により両者が接触するまで接近させる近接ステップ(S1)と、
前記探針と前記試料表面との接触後それらの間に作用する任意の物性に対応した信号の測定を指示する測定ステップ(S2)と、
前記測定ステップで測定している物性に対応する信号が安定するまで前記探針と前記試料表面の接触状態の維持を指示する接触状態維持ステップ(S3)と、
前記信号が安定したことを認知後、直ちにその物性に対応した信号値と形状データの採取を指示するデータ採取ステップ(S4)と、
該信号値及び形状データ採取後直ちに前記探針を前記試料表面から一定距離だけZ方向に相対的に離間を指示する第一の離間ステップ(S5)と、
前記の探針と試料の離間後に該探針を次の観察位置までXまたはY方向に移動を指示する移動ステップ(S6)と、
該移動ステップの際、前記探針と前記試料表面とが予め設定した距離以内に接近又は接触したことを検出した場合に該探針を該試料表面から一定距離引き離すことを指示する第二の離間ステップ(S7)と、
をコンピュータに実行させることを特徴とするプログラム。
【請求項2】
前記測定ステップ(S3)の開始直前に物性測定に必要な電気信号を出力するステップ(S21)と、該測定の停止直後に当該電気信号の出力を停止するステップ(S41)とを更にコンピュータに実行させる請求項1に記載のプログラム。
【請求項3】
前記第二の離間ステップ(S7)の後に前記移動ステップ(S6)に進むことを指示する請求項1に記載のプログラム。
【請求項4】
前記第二の離間ステップ(S7)の後に前記近接ステップ(S1)に進むことを支持する請求項1に記載のプログラム。
【請求項5】
前記移動ステップ(S6)又は前記第二の離間ステップ(S7)の後に前記探針を試料に近接させる前に当該測定において測定する物性に対応する信号を取得するステップ(S01)を含み、以後順次近接ステップ(S1)から前記移動ステップ(S6)までを繰り返すことを指示する請求項1〜4のいずれかに記載のプログラム。
【請求項6】
前記測定ステップ(S3)における信号が、前記探針の先端又は前記試料表面に発生させたエバネッセント光の散乱光であって、
前記近接ステップ(S1)の前に前記探針の先端又は試料表面にエバネッセント光を発生させることを指示するエバネッセント光発生ステップ(S02)と、
前記測定ステップ(S3)の後に前記エバネッセント光の散乱光の検出を指示するエバネッセント光散乱光検出ステップ(S22)と、を更に含んでなる請求項1〜5のいずれかに記載のプログラム。
【請求項1】
カンチレバーの先端に備わる探針により試料表面の走査を行い当該試料の任意の物性に対応した信号を検出することで当該物性の測定を行う走査型プローブ顕微鏡の走査をコンピュータに実行させるプログラムであって、
前記探針と前記試料のうち少なくともいずれか一方をZ方向移動指示により両者が接触するまで接近させる近接ステップ(S1)と、
前記探針と前記試料表面との接触後それらの間に作用する任意の物性に対応した信号の測定を指示する測定ステップ(S2)と、
前記測定ステップで測定している物性に対応する信号が安定するまで前記探針と前記試料表面の接触状態の維持を指示する接触状態維持ステップ(S3)と、
前記信号が安定したことを認知後、直ちにその物性に対応した信号値と形状データの採取を指示するデータ採取ステップ(S4)と、
該信号値及び形状データ採取後直ちに前記探針を前記試料表面から一定距離だけZ方向に相対的に離間を指示する第一の離間ステップ(S5)と、
前記の探針と試料の離間後に該探針を次の観察位置までXまたはY方向に移動を指示する移動ステップ(S6)と、
該移動ステップの際、前記探針と前記試料表面とが予め設定した距離以内に接近又は接触したことを検出した場合に該探針を該試料表面から一定距離引き離すことを指示する第二の離間ステップ(S7)と、
をコンピュータに実行させることを特徴とするプログラム。
【請求項2】
前記測定ステップ(S3)の開始直前に物性測定に必要な電気信号を出力するステップ(S21)と、該測定の停止直後に当該電気信号の出力を停止するステップ(S41)とを更にコンピュータに実行させる請求項1に記載のプログラム。
【請求項3】
前記第二の離間ステップ(S7)の後に前記移動ステップ(S6)に進むことを指示する請求項1に記載のプログラム。
【請求項4】
前記第二の離間ステップ(S7)の後に前記近接ステップ(S1)に進むことを支持する請求項1に記載のプログラム。
【請求項5】
前記移動ステップ(S6)又は前記第二の離間ステップ(S7)の後に前記探針を試料に近接させる前に当該測定において測定する物性に対応する信号を取得するステップ(S01)を含み、以後順次近接ステップ(S1)から前記移動ステップ(S6)までを繰り返すことを指示する請求項1〜4のいずれかに記載のプログラム。
【請求項6】
前記測定ステップ(S3)における信号が、前記探針の先端又は前記試料表面に発生させたエバネッセント光の散乱光であって、
前記近接ステップ(S1)の前に前記探針の先端又は試料表面にエバネッセント光を発生させることを指示するエバネッセント光発生ステップ(S02)と、
前記測定ステップ(S3)の後に前記エバネッセント光の散乱光の検出を指示するエバネッセント光散乱光検出ステップ(S22)と、を更に含んでなる請求項1〜5のいずれかに記載のプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−209073(P2011−209073A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−76365(P2010−76365)
【出願日】平成22年3月29日(2010.3.29)
【出願人】(503460323)エスアイアイ・ナノテクノロジー株式会社 (330)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【出願人】(503460323)エスアイアイ・ナノテクノロジー株式会社 (330)
[ Back to top ]