
走査型プローブ顕微鏡
【課題】 支持剛性が高く、振動や温度変化の影響が少なく、光学顕微鏡と組み合わせた場合に、対物レンズや照明装置をサンプルに十分近接できるように薄型のユニットで構成されプローブとサンプルの位置合わせが容易に行えるようなZ軸粗動機構を有する走査型プローブ顕微鏡を提供する。
【解決手段】 プローブ21が取り付けられた走査型プローブ顕微鏡ユニット4をサンプルSに近接させるZ軸粗動機構110を、Z軸方向に移動可能な上面移動テーブルを有し、上面から低面にかけて中空の開口部113を有し、中空開口部113の周囲を取り囲む外周部から内周部にかけて切欠を有する構成とし、走査型プローブ顕微鏡ユニット4を上面移動テーブル上に設けられたXYステージ140に固定し中空開口部113に配置した。
【解決手段】 プローブ21が取り付けられた走査型プローブ顕微鏡ユニット4をサンプルSに近接させるZ軸粗動機構110を、Z軸方向に移動可能な上面移動テーブルを有し、上面から低面にかけて中空の開口部113を有し、中空開口部113の周囲を取り囲む外周部から内周部にかけて切欠を有する構成とし、走査型プローブ顕微鏡ユニット4を上面移動テーブル上に設けられたXYステージ140に固定し中空開口部113に配置した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料の表面にプローブを近接させて走査することにより、サンプルの表面形状や粘弾性等の各種の物性情報を測定する走査型プローブ顕微鏡に関するものである。
【背景技術】
【0002】
金属、半導体、セラミック、樹脂、高分子、生体材料、絶縁物等の試料を微小領域にて測定し、試料の粘弾性等の物性情報や試料の表面形状の観察等を行う装置として、走査型プローブ顕微鏡(SPM:Scanning Probe Microscope)が知られている。
【0003】
これら走査型プローブ顕微鏡の中には、サンプルが載置されるサンプルホルダと、サンプルの表面に近接させる先端にプローブを有し、試料の表面に近接させるカンチレバーを備えたものが周知となっている(例えば、特許文献1参照)。そして、これらサンプルホルダとプローブとをサンプル面内のX、Y方向に相対的に走査させ、この走査中にカンチレバーの変位量を測定しながら、サンプルホルダまたはプローブをZ方向に動作させて、サンプルとプローブの距離制御を行うことにより、表面形状や各種物性情報を測定するようになっている。
【0004】
また、光学顕微鏡と走査型プローブ顕微鏡を組み合わせて、光学顕微鏡による明視野観察、暗視野観察、微分干渉観察、位相差観察、蛍光観察などから得られる情報からサンプル表面上の被測定箇所を特定し、被測定箇所にプローブを位置決めして、走査型プローブ顕微鏡により、さらに高分解能で表面形状や各種物性情報の測定が行われている。(例えば、特許文献2参照、特許文献3参照)
図9に第一の従来の走査型プローブ顕微鏡の構成を示す。
【0005】
この従来技術では、支持基材220上に、先端にプローブを有するカンチレバー224と、カンチレバーの変位を検出するための光てこ光学系、および、カンチレバー224をサンプルに対してスキャンさせるための三軸微動機構が配置され走査型プローブ顕微鏡ユニットが構成されている。
【0006】
光てこ光学系は、半導体レーザ271と、コリメートレンズ(図示せず)、偏光ビームスプリッタ282、1/4波長板283、反射鏡275、277、278、集光レンズ284、4分割フォトダイオードよりなるポジションセンサ273により構成される。半導体レーザ271から出た出射光は、コリメートレンズにより平行光に変換される。変換された平行光は偏光ビームスプリッタ282を通過する。このとき、偏光ビームスプリッタ282にp偏光成分が入射するように半導体レーザ271の向きを調整しておく。偏光ビームスプリッタ282を出たp偏光成分は1/4波長板283を通過して円偏光に変換される。そのあと、反射板275で光路を変換し、集光レンズ284を通り、反射板277、反射板278で光路を変換して、カンチレバー224の背面に集光される。カンチレバー224からの反射光は、前述の光路と逆の光路をとおり、1/4波長板283によりs偏光に変換され、偏光ビームスプリッタ282に入射する。s偏光成分は、偏光ビームスプリッタ282を透過せずに反射して光路を曲げられて、4分割フォトディテクタ273に入射する。カンチレバー224が撓んだ場合、4分割フォトディテクタ273上のスポットが動き、4分割フォトディテクタ273の出力信号によりカンチレバー224の撓みを検出することができる。
【0007】
カンチレバー224はX方向微動機構251、Y方向微動機構222、Z方向微動機構223より構成される3軸微動機構のZ方向微動機構223に固定されており、X方向微動機構251とY方向微動機構222によりサンプル面内でスキャンされ、Z方向微動機構223によりサンプル表面とプローブ間の距離制御が行われる。
【0008】
ここで、支持基材220には2本のマイクロメータ261とステッピングモータ262に接続された1本の差動マイクロメータ263が取り付けられてZ軸粗動機構が構成される。Z軸粗動機構はそれぞれのマイクロメータのヘッドの先端部がベースプレート(図示せず)上に載せられ走査型プローブ顕微鏡ユニットが3点で支持されている。プローブをベースプレート上に置かれたサンプルに近接させる場合には、ユニットの側面からプローブとサンプルを目視観察しながら、あらかじめ3本のマイクロメータ261、263で両者を大まかに近接させたあと、光てこ光学系の信号を見ながら、ステッピングモータ262で差動マイクロメータ263を少しづつ動かして、プローブとサンプルを近接させる。
【0009】
このように構成された走査型プローブ顕微鏡ユニットは、市販の倒立型顕微鏡のベースプレート上に載置してベースプレート上のサンプルの測定に使用されている。
【0010】
次に、図10(a)に、光学顕微鏡を備えた走査型プローブ顕微鏡の第二の従来例の概観図を示す。
【0011】
光学顕微鏡として用いた倒立顕微鏡は、一般に市販されている倒立顕微鏡を使用している。この倒立顕微鏡のフレーム330に取り付けられたベースプレート311上に支柱313を介して走査型プローブ顕微鏡ユニット314が取り付けられている。
【0012】
走査型プローブ顕微鏡ユニット314の構成を図10(b)に示す。走査型プローブ顕微鏡ユニット314は、先端にプローブ315が設けられたカンチレバー328を保持するためのカンチレバーホルダ326と、カンチレバー328の変位を検出するための変位検出機構318、ベースプレート311上に置かれたサンプル342とプローブ315を相対的にスキャンさせるための三軸微動機構316により構成される。
【0013】
三軸微動機構316は円筒型の圧電素子により構成されて、圧電素子を伸縮させることで、プローブ315とサンプル342間の距離を調整し、圧電素子を撓ませることでプローブ315をサンプル342面内で走査させる。円筒型圧電素子の先端には光てこ方式の変位検出機構318が固定され、さらに変位検出機構318に固定されたカンチレバーホルダ326を介してカンチレバー328が固定されている。変位検出機構318は半導体レーザ320からの出射光をダイクロイックミラー322でカンチレバー328方向に曲げて、カンチレバー328の背面に照射し、カンチレバー328の背面からの反射光をスポット位置センサ324で受光して、スポット位置センサ324の信号によりカンチレバー328の撓み量を検出する。
【0014】
走査型プローブ顕微鏡ユニット314はコンデンサレンズ316を有する倒立顕微鏡の照明装置317と、サンプル342下面側に配置された対物レンズ332の間に配置されており、コンデンサレンズ316からの照明光は円筒型圧電素子が固定される支持部319の透過孔321、円筒型圧電素子316の内部、光てこ系のダイクロイックミラー322を透過してサンプル342に照射され、サンプル342を透過した光が対物レンズ332により集光されて、プローブ315とサンプル342の像が観察される。
【0015】
ここで、走査型プローブ顕微鏡ユニット314は支柱313に取り付けられており、通常支柱部313に倒立顕微鏡の光軸方向に沿って、プローブ315をサンプル342に近接させるZ軸粗動機構が設けられる。
【特許文献1】特開2000−346784号公報
【特許文献2】特開平10−19906号公報
【特許文献3】特開平9−166602号公報
【発明の開示】
【発明が解決しようとする課題】
【0016】
しかしながら、図9に示した第一の従来技術の走査型プローブ顕微鏡ユニットでは、プローブとサンプルを近接する場合に、差動マイクロメータ263のヘッド部をステッピングモータ262で上下させると、2本のマイクロメータ261のヘッドを支点として、プローブが円弧運動で動作する。このため、サンプルとプローブ先端の位置がずれてしまい位置合わせが困難である。
【0017】
また、走査型プローブ顕微鏡ユニットの大きさに比較して3本のマイクロメータ261、263のヘッド部は直径が小さいため、走査型プローブ顕微鏡ユニットの支持剛性が低く振動により測定データに振動ノイズが載ってしまう。また、測定場所の温度変化により、マイクロメータのヘッド部や走査型プローブ顕微鏡ユニットが熱膨張し、それにより測定精度が悪化する。
【0018】
また、図10のように構成された第二の従来技術の走査型プローブ顕微鏡では、走査型プローブ顕微鏡ユニット314が支柱313に対して片持ち支持された構成であるために、支持剛性が低く振動により測定データにノイズが載ってしまう。
【0019】
また、走査型プローブ顕微鏡と組み合わせた倒立顕微鏡の機能を十分に発揮して、走査型プローブ顕微鏡による測定前のプローブとサンプルの位置合わせ精度を上げるためには、対物レンズを交換可能とし、低倍率の対物レンズから、高倍率の対物レンズに交換して測定を行う必要がある。高倍率の対物レンズでは、作動距離は数mm〜数百μmと微小であり、また、照明用コンデンサレンズの作動距離も十分な照明効率を確保するためには開口数0.5程度のコンデンサレンズをサンプルに対して約30mm程度まで接近させる必要がある。
【0020】
図10の従来例では走査型プローブ顕微鏡ユニットと支柱に設けられたZ軸粗動機構の光軸方向の高さが高くなるため、コンデンサレンズをサンプルに近づけることができない。このため、作動距離が長く開口数の小さいコンデンサレンズしか使用できず、せっかく倒立顕微鏡と組み合わせても倒立顕微鏡の機能を十分に使用できず、光学顕微鏡により被測定箇所への位置決めが困難であった。
【0021】
このような問題点に鑑みて、本発明では、支持剛性が高く、サンプル面内に垂直な方向に直進しながら近接可能なZ軸粗動機構を持つ走査型プローブ顕微鏡を提供する。このとき、プローブとサンプルの近接状況を確認するために側面から両者の観察を行えるような構造とする。
【0022】
さらに、本発明では光学顕微鏡と組み合わせた場合に、対物レンズや照明装置をサンプルに十分近接できるように薄型のユニットで構成できるようなZ軸粗動機構を持つ走査型プローブ顕微鏡を提供する。
【0023】
さらに、本発明では測定環境により温度ドリフトの影響を受けないような走査型プローブ顕微鏡を提供する。
【課題を解決するための手段】
【0024】
上記課題を解決するために、本発明では以下の手段により走査型プローブ顕微鏡を構成した。
【0025】
プローブとサンプルホルダ上に載置されたサンプル間の高さ方向の距離を制御しながら、サンプル面内で前記プローブとサンプルを相対的に移動させる走査型プローブ顕微鏡において、前記プローブとサンプル表面とを近接させるZ軸粗動機構を、サンプル面内と垂直な方向に移動する上面移動テーブルを有し、前記Z軸粗動機構に上面から低面にかけて中空の開口部を設け、中空開口部の周囲を取り囲む前記Z軸粗動機構側面の外周部から内周部にかけて切欠を設けた構造とし、前記中空開口部に前記プローブまたは前記サンプルホルダのいずれかを含む走査型プローブ顕微鏡のユニットを配置し、前記走査型プローブ顕微鏡ユニットを前記上面移動テーブルに固定し、プローブとサンプル表面を近接できるようにした。
【0026】
このZ軸粗動機構は、上面移動テーブル面内と平行な方向に摺動可能で第一の傾斜部を有する水平移動部と、概第一の傾斜部と摺動可能に連結される第二の傾斜部を有し前記上面移動テーブルが固定され前記上面移動テーブル面内での動きが拘束され前記上面移動テーブルと直交する方向に移動可能に配置された垂直移動部から構成され、前記水平移動部を上面移動テーブルと平行な方向に移動させ、前記第一の傾斜部により前記第二の傾斜部を押すことにより前記上面移動テーブルをテーブル面に垂直方向に移動させるように構成した。
【0027】
また、前記Z軸粗動機構の上面移動テーブル上に、上面移動テーブル面内で移動可能な第二のステージを固定し、該第二のステージを介して、前記走査型プローブ顕微鏡ユニットを前記上面移動テーブルに固定した。
【0028】
また、前記中空開口部に顕微鏡用照明装置の一部または全部が配置されるようにした。このとき照明装置は開口数0.5以上のコンデンサレンズが含まれるようにした。
【0029】
また、前記走査型プローブ顕微鏡ユニットに取り付けられたプローブに対向する位置に、透過孔を有するサンプルホルダを配置し、該サンプルホルダに対して前記プローブと対向する側に対物レンズを配置した。
【0030】
また、前記走査型プローブ顕微鏡ユニットに取り付けられたサンプルホルダに対向する位置にプローブを配置し、該プローブに対して前記サンプルホルダと対向する位置に対物レンズを配置した。
【0031】
また、前記中空開口部に対物レンズまたは集光レンズを配置した。
【0032】
さらに、本発明では、前記Z軸粗動機構が設置されるベースプレートにサンプルホルダまたはプローブを固定し、前記サンプルホルダおよび前記ベースプレートおよび前記Z軸粗動機構および前記走査型プローブ顕微鏡ユニットを実質的に同一の材質で構成した。さらに前記材質を、熱膨張係数が4×10-6/K以下の低膨張材料とし、前記サンプルホルダおよび前記ベースプレートおよび前記Z軸粗動機構および前記走査型プローブ顕微鏡ユニットの全質量のうち、80%以上が同一の材質で構成されるようにした。
【発明の効果】
【0033】
以上のように走査型プローブ顕微鏡を構成することで、中空開口部を取り囲む上面移動テーブル面で広範囲に亘り走査型プローブ顕微鏡ユニットを支持することができるため支持剛性を高くすることができ、走査型プローブ顕微鏡の測定像への振動の影響を低減できる。
【0034】
また、Z軸粗動機構の外周部から内周部に切欠を設けているので、側面からプローブとサンプルの状態を観察でき近接状況を目視観察できる。また、第二のステージによりプローブをサンプル面内で移動できるため、プローブの面内の位置合わせも容易に行うことが可能で、操作性が向上する。
【0035】
さらに、Z軸粗動機構が平面状に展開されたZステージ構造としているため、ユニット全体の高さを薄くでき、高い開口数のコンデンサレンズや対物レンズをサンプルに近づけることが可能で光学顕微鏡の観察性能が上がり、位置決め精度が向上する。
【0036】
また、熱により各材料が膨張してもお互いに膨張量を補償することができ、熱によるドリフトの影響が抑制されて、走査型プローブ顕微鏡の測定精度が向上する。
【発明を実施するための最良の形態】
【0037】
以下、本発明の走査型プローブ顕微鏡について、図面を参照して説明する。
【実施例1】
【0038】
本実施例においては、カンチレバーを共振周波数付近で振動させながらサンプルに近づけ、振巾や位相の変化量により、プローブと試料間の距離を一定に保ちながら走査するDFMモード(Dynamic Force Mode)による測定を行うものとする。
【0039】
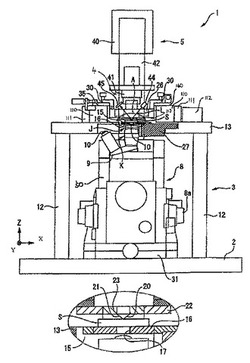
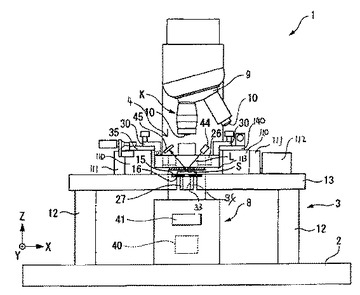
図1に本発明の第一実施例による走査型プローブ顕微鏡について、(a)は走査型プローブ顕微鏡の正面図であり、(b)は(a)において符号Aによって示す領域の拡大図を示す。
【0040】
この走査型プローブ顕微鏡1は、市販の倒立顕微鏡と組み合わせたものであり、図1(a)および(b)に示すように、除振台2に設置された走査型プローブ顕微鏡ユニットベース部3と、この走査型プローブ顕微鏡ユニットベース部3のベースプレート13に設けられた走査型プローブ顕微鏡ユニット4およびZ軸粗動機構110およびZ軸粗動機構の上面に設けられたXYステージ140と、走査型プローブ顕微鏡ユニット4の下方に設けられた光学顕微鏡部(倒立顕微鏡)8と、この走査型プローブ顕微鏡ユニット4の上方に設けられ、光学顕微鏡部8のフレーム部50に連なる照明装置5とを備えている。
【0041】
光学顕微鏡部8は、XYステージ31を介して除振台2に載置されている。このXYステージ31は光学顕微鏡部8に設置された対物レンズ10の光軸中心にサンプルを位置合わせするためのサンプル位置調整機構として作用する。
【0042】
走査型プローブ顕微鏡ユニットベース部3は、除振台2から垂直に延びる4本の支柱12により4隅を支持された、平板状のベースプレート13を備えて構成されるものである。このベースプレート13は熱膨張を抑えるためFe−36Niの成分からなる低膨張材料であるインバー材(熱膨張係数0.5〜2×10-6/K)を用いている。
【0043】
ここで、走査型プローブ顕微鏡ユニットベース部3は光学顕微鏡部8のフレーム部50には固定されておらず、光学顕微鏡部3に対して独立している。
【0044】
ベースプレート13の中央部には、ベースプレート開口部15が形成されており、このベースプレート開口部15内に、サンプルSが載置されるサンプルホルダ16が設けられており、このサンプルホルダ16の中央にはサンプルホルダ開口部17が形成されている。サンプルホルダ16は、後述するサンプル微動機構部27により、Z方向に沿って微動するようになっている。なお、Z方向とは、サンプルSの表面およびサンプルホルダ16に垂直な方向であって、光学顕微鏡を備えた走査型プローブ顕微鏡1の高さ方向をいう。
【0045】
サンプルホルダ16の上面には、上述の走査型プローブ顕微鏡ユニット4が設置されている。走査型プローブ顕微鏡ユニット4は、後述するプローブ微動機構部26を備えており、このプローブ微動機構部26には、左右と後ろ側に合計3箇所のクランク状のクランク固定部30が設けられている。そして、クランク固定部30により、プローブ微動機構部26は、その中心がサンプルホルダ開口部17に一致するようにXYステージ140を介してZ軸粗動機構110に固定されている。
【0046】
なお、プローブ微動機構部26およびサンプル微動機構部27は、走査型プローブ顕微鏡用三軸微動機構を構成するものである。
【0047】
プローブ微動機構部26の下面には、カンチレバー20を支持する大気中測定と溶液中測定兼用のカンチレバーホルダ22が設けられている。カンチレバーホルダ22の中央には、ガラスからなるガラスホルダ23が設けられている。
【0048】
このガラスホルダ23を用いて溶液中で測定を行う場合には、サンプルSとガラスホルダ23との間に、液の粘性による膜を形成させることにより、液中測定時の照明光の乱反射等を防止する。
【0049】
なお、カンチレバー20は、長尺状のものに限定されず、平面視して三角形状のものや、断面が円形で光ファイバーの先端を先鋭化して湾曲させた近接場顕微鏡用のベントプローブ、あるいはカンチレバーの代わりに走査型トンネル顕微鏡や近接場顕微鏡用のストレート型のプローブなども本発明に含まれる。
【0050】
カンチレバー20は、サンプルホルダ開口部17の上方に設けられている。カンチレバー20の先端には、先鋭化されたプローブ21が設けられており、後端は、カンチレバーホルダー22に固定されている。これにより、カンチレバー20は、プローブ21が設けられた先端側が自由端となるように片持ち支持されている。また、カンチレバー20は、不図示の加振手段により、Z方向に沿って所定の周波数及び振幅で振動され、さらに、プローブ微動機構部26により、サンプルホルダ16に対して、X、Y方向に微動するようになっている。なお、XY方向とは、サンプルSの表面およびサンプルホルダ16に平行な互いに直交する方向であって、Z方向と直交する方向をいう。さらに、X方向とは、光学顕微鏡付の走査型プローブ顕微鏡1の幅方向をいい、Y方向とは、走査型プローブ顕微鏡1の奥行方向をいうものとする。
【0051】
また、プローブ微動機構部26の近傍には、モーター駆動部112によってカンチレバー20をZ方向に粗動移動させるためのZ軸粗動機構部110が設けられており、Z軸粗動機構部110のベース111が走査型プローブ顕微鏡ユニットベース部3のベースプレート13に固定されている。このZ軸粗動機構部110の上面にはプローブ21をXY面内で移動させるプローブ位置調整機構として作用するXYステージ140が設けられており、このXYステージ140の上面に、走査型プローブ顕微鏡ユニット4の左右2箇所と後ろ側の合計3箇所設けられたクランク固定部30が固定されている。
【0052】
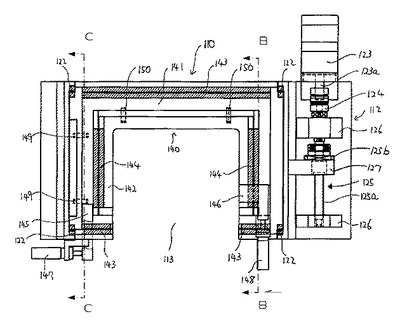
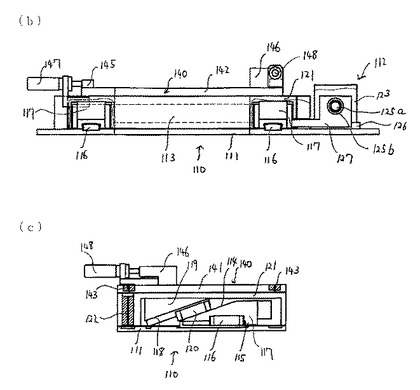
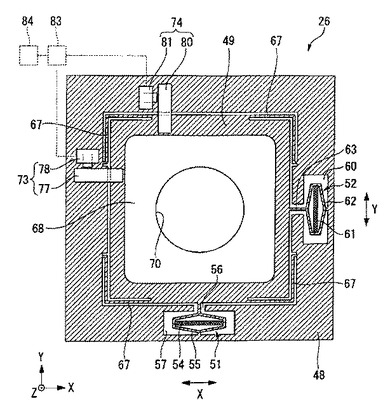
ここで、Z軸粗動機構110の詳細な構造を図2に示す。図2(a)はZ軸粗動機構の平面図、図2(b)は正面図、図2(c)は図2(a)のB−B線断面図である。
【0053】
なお、図2(c)は図2(a)のC−C線断面図をとった場合にもマイクロメータ146とアーム144を除き同一の形状である。また、各図面は、構成を理解しやすいように本来なら隠れ線で見える箇所を実線で示している箇所がある。
【0054】
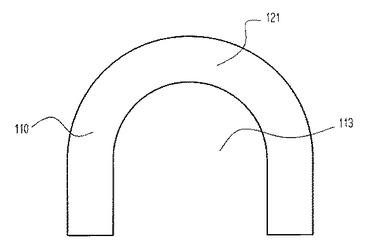
このZ軸粗動機構110は、平面視「コ」の字形状をしている。即ち、平面視四角形のZ軸粗動機構110の中央部に上面から底面にかけて貫通した中空開口部113が設けられており、さらに、Z軸粗動機構110の周囲を取り囲む側面のうち正面の外周部から内周部の側面が貫通した切欠の構造となっている。
【0055】
このZ軸粗動機構110は、平面視「コ」の字形状のベース111を有し、同じく平面視「コ」の字形状でZ軸粗動機構110の左右に後方から正面にかけて第一の傾斜面114を有し左右の傾斜面の底面115がベース111にリニアガイド116により前後方向に摺動可能に固定された水平移動部117が設けられ、さらにZ軸粗動機構110の左右に正面側から後方にかけて第二の傾斜面118を有する垂直移動部119が前記第一の傾斜面114にリニアガイド120を介して傾斜面に沿って摺動可能に固定されている。前記垂直移動部119は、平面視「コ」の字状の上面移動テーブル121に固定されており、上面移動テーブル121はテーブルの4隅の高さ方向に配置されたクロスローラガイド122により高さ方向の移動以外の動きが拘束されている。
【0056】
Z軸粗動機構110の右側にはモータ駆動部112が設置されている。モータ駆動部112はステッピングモーター123とカップリング124、ボールネジ125、およびベアリングを内蔵したサポート126から構成される。
【0057】
ステッピングモータ123の出力軸123aにはカップリング124を介してボールネジ125のオネジのネジ軸125aが固定されている。オネジのネジ軸125aは末端と先端部がサポート内126のベアリングに回転可能に収納されている。オネジのネジ軸125aにはメネジが設けられて内部にベアリング球が内蔵されたボールネジナット125bがはめ込まれている。ボールネジナット125bにはアーム127が取り付けられて、アーム127は前述の水平移動部117に固定されている。この状態で、モータ123を回転させると、カップリング124を介してネジ軸125aが回転し、回転方向の動きを規制されたボールネジナット125bは前後方向に移動する。このとき、アーム127を介して、水平移動部117もベース111に取り付けられたリニアガイド116にガイドされ前後方向に動作する。
【0058】
水平移動部117が前後方向に動作すると、第一の傾斜面114が、垂直移動部119の第二の傾斜面118を押す。このとき、垂直移動部119に連結された上面移動テーブル121が水平方向の動きを規制されているため、上面移動テーブル121を高さ方向に直進させることができる。
【0059】
また、上面移動テーブル121面には、平面視「コ」の字状で左右方向に移動可能なX移動テーブル141と前後方向に動作可能なY移動テーブル142より構成されるXYステージ140が設けられている。X移動テーブル141は、上面移動テーブル121の前後に左右方向に沿って設けられたクロスローラーガイド143により左右方向に案内され、Y移動テーブル142は、Y移動テーブル142の左右に前後方向に沿って設けられたクロスローラガイド144により前後方向に案内される。X移動テーブル141、Y移動テーブル142には支点となるアーム145、146が固定されており、Z軸粗動機構110の上面移動テーブル121に固定されたマイクロメータ147によりX移動テーブル141は左右方向に押され、X移動テーブルに固定されたマイクロメータ148によりY移動テーブル142が前後方向に押される。各々のマイクロメータ147、148と対向する側には圧縮バネ149、150が設けられており、マイクロメータ147、148を動作させることで任意の位置にXYステージ140を位置決めすることができる。
【0060】
なお、ベース111、水平移動部117、垂直移動部118、上面移動テーブル121、X移動テーブル141、Y移動テーブル142はベースプレート13と同じく熱膨張を抑えるためFe−36Niの成分からなる低膨張材料であるインバー材(熱膨張係数0.5〜2×10-6/K)を用いている。
【0061】
以上のようにZ軸粗動機構110とXYステージ140を構成し、Z軸粗動機構110の中空開口部113にプローブを有する走査型プローブ顕微鏡ユニット4を配置する場合、走査型プローブ顕微鏡ユニット4は左右と後ろの3箇所荷に設けられたクランク固定部30で、XYステージ140を介してZ軸粗動機構110に固定されるためZ軸粗動機構110への支持剛性が高く、振動の影響が抑制されて走査型プローブ顕微鏡の測定データの質が向上する。
【0062】
また、Z軸粗動機構110とXYステージ140の正面側が外周部から内周部にかけて開口となっているので、プローブ21とサンプルSを側面から観察することができ、また、サンプル交換の際にも側面からサンプルを置くことができるため操作性が向上する。
【0063】
図3に図1のプローブ微動機構部26部分を拡大した平面図を示す。
【0064】
本実施形態におけるプローブ微動機構部26は、図3に示すように、幅寸法の異なる矩形枠状の外フレーム48および内フレーム49を備えており、これら外フレーム48および内フレーム49は、インバー材により平面状に形成されている。また、外フレーム48と内フレーム49とは、X駆動部(第1の駆動部)52とY駆動部(第1の駆動部)51とを介して、互いに同心上に連結されており、外フレーム48および内フレーム49の上面は面一にして配されている。X駆動部52は、外フレーム48に形成されたY方向に延びるX側空洞部60内に設置されており、Y駆動部51は、同様にX方向に延びるY側空洞部57内に設置されている。
【0065】
X駆動部52は、Y方向に向けられた積層型のX側圧電素子61を備えている。X側圧電素子61には、その周囲を取り囲むように、上面視して略ひし形のX側変位拡大機構部62が設けられている。そして、X側変位拡大機構部62は、X側連結部63を介して、内フレーム49に連結されている。
【0066】
また、Y駆動部51は、X方向に向けられた積層型のY側圧電素子54を備えている。Y側圧電素子54には、上記と同様に、略ひし形のY側変位拡大機構部55が設けられており、Y側変位拡大機構部55は、Y側連結部56を介して、内フレーム49に連結されている。
【0067】
内フレーム49の四隅には、平行バネ67が設置されている。
【0068】
そして、X側圧電素子61およびY側圧電素子54に電圧を印加することにより、X側変位拡大機構部62およびY側変位拡大機構部55が、それぞれX方向、Y方向に拡大縮小し、これにより内フレーム49をXY方向に微動できるようになっている。
【0069】
また、内フレーム49の底面には、略矩形の基板68が設けられている。基板68の中央には、Z方向にプローブ側貫通孔70が形成されている。そして、このプローブ側貫通孔70に、図1に示す光源40からの照明光が通過するようになっている。
【0070】
なお、基板68の下面に、上述したように、カンチレバーホルダ22を介してカンチレバー20が設けられており、内フレーム49のXY方向の微動により、基板68およびカンチレバーホルダ22とともに、カンチレバー20もXY方向に微動するようになっている。
【0071】
また、外フレーム48および内フレーム49の上面には、Y方向微動量検出部73およびX方向微動量検出部74が設けられている。Y方向微動量検出部73は、内フレーム49に固定されX方向に延びるY方向ターゲット77と、外フレーム48に固定され、Y方向ターゲット77のY方向の移動量を検出するY方向センサ78とを備えている。
【0072】
また、X方向微動量検出部74は、同様にして内フレーム49に固定されY方向に延びるX方向ターゲット80と、外フレーム48に固定されX方向ターゲット80のY方向の移動量を検出するX方向センサ81とを備えている。これらY方向センサ78およびX方向センサ81としては、静電容量センサが用いられるが、これに限定されるものではなく、ひずみゲージや光学式変位系、差動トランスなどでもよい。
【0073】
このような構成のもと、内フレーム49がX方向に微動すると、X方向ターゲット80もX方向に微動し、そのX方向の微動量をX方向センサ81が検出するようになっている。また、内フレーム部49がY方向に微動すると、Y方向ターゲット77もY方向に微動し、そのY方向の微動量をY方向センサ78が検出するようになっている。すなわち、X方向センサ81は、X方向ターゲット80および内フレーム部49を介して、カンチレバー20のX方向の微動量を検出し、Y方向センサ78は、またY方向ターゲット77および内フレーム部49を介して、カンチレバー20のY方向の微動量を検出する微動量検出手段として機能するものである。
【0074】
X方向センサ81およびY方向センサ78は、それぞれ演算部(算出手段)83に電気的に接続されており、X方向センサ81およびY方向センサ78からの検出結果が、演算部83に入力されるようになっている。演算部83は、検出結果に応じて、印加された電圧と微動量とによって、カンチレバー20のXY方向の微動量の誤差を算出するようになっている。すなわち、演算部83は算出手段として機能するものである。さらに、演算部83は、各種制御を行う制御部84に電気的に接続されており、算出結果を制御部84に入力するようになっている。そして、この制御部84によって、印加電圧に対して、プローブ微動機構部27が線形に動作するように制御される。
【0075】
また、プローブ微動機構部26には、図1に示すように、プローブ変位検出手段としてレーザ光を発するレーザ光源44と、このレーザ光源44からのレーザ光を受光し、例えば4分割されたフォトディテクタ45とが設けられている。これらレーザ光源44およびフォトディテクタ45は、カンチレバー20の斜め上方に互いに対向して配置されている。そして、レーザ光源44から出射されたレーザ光が、カンチレバー20の上面に到達してそこで反射し、その反射光がフォトディテクタ45に到達するようになっている。
【0076】
また、プローブ微動機構部26の上方には、上述の照明装置5が設られている。照明装置5は、照明光を発する光源40と、この光源40からの照明光を集光するためのコンデンサレンズ41(開口数0.52、作動距離30mm)とを備えている。コンデンサレンズ41は、倒立顕微鏡部8のフレーム部50に連なる照明用支柱42によって、プローブ微動機構部26の中心上方に配されて、プローブ微動機構部26に対して上下動可能に支持されている。なお、走査型プローブ顕微鏡ユニットベース部3には照明装置5は固定されていない。
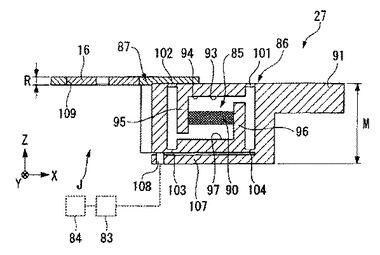
【0077】
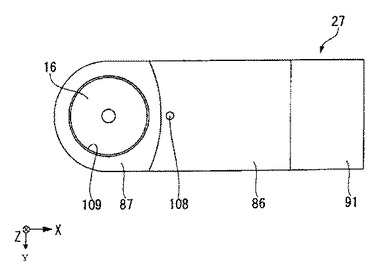
さらに、本実施例におけるサンプル微動機構部27は、図4および図5に示すように、略長方形状に形成された機構本体部86と、この機構本体部86から、機構本体部86の厚さ方向(すなわちZ方向)に交差する方向(すなわちX方向)に延出する延出部87とを備えている。機構本体部86と延出部87はインバー材により構成される。
【0078】
延出部87の厚さ寸法Rは、機構本体部の厚さ寸法Mよりも小さく設定されている。そして、延出部87の上面と機構本体部86の上面とは略同一にされており、これにより、延出部87の下方には、スペースJが設けられている。
【0079】
延出部87には、Z方向に向けられたサンプルホルダ側貫通孔109が形成されており、このサンプルホルダ側貫通孔109内に、上述のサンプルホルダ16が設けられている。
【0080】
機構本体部86には、延出部87の延出方向と反対方向に延びる本体固定部91が設けられている。本体固定部91は、図1に示すテーブル13の所定の位置に固定されており、これにより、機構本体部86が片持ち支持されている。
【0081】
また、機構本体部86の内部に、空洞部93が設けられている。空洞部93の上内壁部94のX方向の両端のうち、本体固定部91が設けられた方の端部には、第1平行バネ101が設けられており、延出部87が設けられた方の端部には、第2平行バネ102が設けられている。一方、下内壁部97のX方向の両端のうち、延出部87が設けられた方の端部には、第3平行バネ103が、本体固定部91が設けられた方の端部には、第4平行バネ104が設けられている。また、第2平行バネ102の近傍には、上内壁部94から下方に向けて延びる下方壁部95が設けられており、第4平行バネ104の近傍には、下内壁部97から上方に向けて延びる上方壁部96が設けられている。すなわち、下方壁部95および上方壁部96が、互いに反対方向に延ばされて対向して配置されている。
【0082】
そして、これら下方壁部95と上方壁部96との間に、一端が下方壁部95に固定され、他端が上方壁部96に固定されて、X方向に向けられた積層型のZ側圧電素子90が配置され、Z駆動部(第2の駆動部)85が構成される。
【0083】
Z駆動部85は、図3で上述したX駆動部52およびY駆動部51とは、物理的に分離して別個に設けられたものであり、それぞれ独立して機能するものである。
【0084】
さらに、機構本体部86の下端には、X方向に延びる底壁部107が設けられている。この底壁部107のX方向の両端のうち、本体固定部91が設けられた方の端部は、機構本体部86の側壁に一体的に固定されており、延出部87が設けられた方の端部は、自由端となっている。この底壁部107の先端部には、演算部83に接続されたZ方向微動量検出部108が設けられている。Z方向微動量検出部108には、静電容量センサが用いられるが、これに限定されるものではなく、ひずみゲージや光学式変位系、差動トランスなどでもよい。
【0085】
このような構成のもと、Z側圧電素子90に電圧を印加すると、Z側圧電素子90が伸縮するようになっている。そして、Z側圧電素子90が伸びると、下方壁部95および上方壁部96がX方向外方に押圧され、上方壁部96は固定端付近を中心に図4における時計方向に回転するとともに、下方壁部95も固定端付近を中心に時計方向に回転し、結果として、第1から第4の平行バネ101、102、103、104に案内されて、延出部87がZ方向に移動し、延出部87に連結されたサンプルホルダ16がZ方向に移動するようになっている。このとき、Z方向微動量検出部108により、機構本体部86の微動量が検出されるようになっている。すなわち、Z方向微動量検出部108は、Z駆動部の底面の動きを検出し、機構本体部86を介して、サンプルホルダ16のZ方向の微動量を検出する微動量検出手段として機能するものである。そして、演算部83が、Z方向微動量検出部108の検出結果に応じて、印加された電圧と実際の微動量とによって、サンプルホルダ16のZ方向の微動量の誤差を算出するようになっている。この算出結果は制御部84に入力され、この制御部84によって、印加電圧に対して、ステージ微動機構部27が線形に動作するように制御される。
【0086】
なお、Z方向については、単にZ方向微動量検出部108により微動量を検出し、それを走査型プローブ顕微鏡像の高さ上方として表示させてもよい。
【0087】
このように構成されたサンプル微動機構27は、小型かつ高剛性であり、プローブ微動機構部26に比べて共振周波数が高く高速動作が可能となっている。
【0088】
さらに、本実施例においては、図1に示すように、スペースJに対物レンズ10が設けられている。すなわち、倒立顕微鏡部8の上端に、レボルバ(配置変更手段)9が設けられており、このレボルバ9に、それぞれ倍率の異なる複数の対物レンズ10が設けられている。そして、レボルバ9を回すことにより、複数の対物レンズ10の配置が変更されるようになっており、複数の対物レンズ10をスペースJ内の観察位置Kに選択的に配置することができるようになっている。
【0089】
ここでの観察位置Kとは、サンプルホルダ16の下方であって、サンプルホルダ開口部17に一致する位置をいい、試料Sを観察するための位置とする。
【0090】
また、対物レンズ10は、観察位置Kにおいて、倒立顕微鏡8に設けられたフォーカシングダイヤル8aを操作することによりZ方向に上下動することができるようになっている。
【0091】
複数の対物レンズをレボルバの回転により交換する際に、対物レンズの軌道と走査型プローブ顕微鏡ユニット4、走査型プローブ顕微鏡ユニットベース部3が干渉しないように、サンプル微動機構27とベースプレート13には逃げが設けられている。
【0092】
ここで、対物レンズ10はサンプルSに焦点を合わせた状態で交換をする場合が多い。このときベースプレート13との干渉をなくすためにはベースプレートの厚さを薄くする必要がある。本発明では、光学顕微鏡部8と走査型プローブ顕微鏡ユニットベース部3を独立して構成しているため、ベースプレート13の面積を大きくすることができ、ベースプレート13中央部以外の部分の肉厚を厚くすることができ、さらに、厚くすることで質量が重くなっても、光学顕微鏡部8とは独立した支柱12によりベースプレートを支えることができるため、走査型プローブ顕微鏡ユニットベース部3に高い剛性を確保させることが可能となった。
【0093】
以上のように構成された走査型プローブ顕微鏡では、走査型プローブ顕微鏡ユニット4とZ軸粗動機構110を薄く構成でき、さらにベースプレート13の下側に対物レンズ10を交換可能に配置できるスペースを有しているため、走査型プローブ顕微鏡ユニット4をコンデンサレンズ41と対物レンズ間の狭い空間に入れることができ、光学顕微鏡の性能を十分に活用でき位置合わせ精度を向上させることができる。
【0094】
また、プローブ21はサンプル面に対して垂直に直進するため、Z軸に沿ってプローブ21とサンプルを近接させる際に光軸に沿って移動するため位置ずれが発生せず、光学顕微鏡で観察した場所への位置合わせ精度も向上する。
【0095】
また、プローブ微動機構26とサンプル微動機構27サンプル微動機構に取り付けられたサンプルホルダ16を含む走査型プローブ顕微鏡ユニット4とZ軸粗動機構110、XYステージ140、走査型プローブ顕微鏡ユニットベース部3のベースプレート13の材料を実質的に同一とし、温度によるひずみの少ない低膨張金属であるインバー材(熱膨張係数0.5〜2×10-6/K)により構成し、温度によるひずみ自体を抑えるとともに、ひずみが生じた場合でもお互いにひずみ量を補償しあえるように構成した。
【0096】
ここで、実質的に同一とは、ユニットの構成上100%同じ材料で構成することは不可能であるため、本実施例においては走査型プローブ顕微鏡ユニット4とZ軸粗動機構110、XYステージ140、走査型プローブ顕微鏡ユニットベース部3のベースプレート13の合計質量のうち80%をインバー材で構成した。
【0097】
例えば、プローブ微動機構26に取り付けられるカンチレバーホルダー22のフレームは軽さを重視してチタンで構成し、ガラスホルダ23を保持している。また、Z軸粗動機構部110のガイド部やモータ駆動部112、サンプル機構部27やプローブ微動機構部26の圧電素子、各ユニットに使用されているネジ、プローブ変位検出手段44、45などはコストや機能上の問題によりインバー材以外の材料を用いた。
【0098】
また、走査型プローブ顕微鏡ユニットベース部3の支柱12は温度により膨張収縮しても走査型プローブ顕微鏡像自体には影響を与えないため、ステンレスにより構成しコストを削減したが、テーブル13と同じインバー材で構成してもよい。
【0099】
なお、低膨張金属としては、Fe−32Ni−5Coを成分とするスーパーインバー材(熱膨張係数0〜1.5×10-6/K)を用いてもよい。また、低膨張材料以外でも、実質的に同一材料であれば、温度によるひずみ量をお互いに補償しあえるため温度ドリフトを抑制することが可能である。
【0100】
次に、このように構成された本実施例における光学顕微鏡を備えた走査型プローブ顕微鏡1の作用について説明する。
【0101】
まず、走査型プローブ顕微鏡ユニット4をZ軸粗動機構110から外し、Z軸粗動機構の正面側からサンプルホルダ16にサンプルSに載置する。そして、走査型プローブ顕微鏡ユニット4をZ軸粗動機構110上のXYステージ140に固定する。そして光源40からサンプルSに向けて照明光を照射する。その照明光は、プローブ側貫通孔70を通り、サンプルSを透過して、さらにサンプルホルダ側開口部17を通ることにより、観察位置Kに配された対物レンズ10に到達する。これによって、対物レンズ10を介して、サンプルSの状態が観察が可能となり、XYステージ31により光学顕微鏡8全体を動かして、サンプルS上の被測定箇所を特定させる。
【0102】
このとき、レボルバ9を回すと、当初の対物レンズ10がスペースJを通って観察位置Kから外れ、他の対物レンズ10が観察位置Kに配置される。これにより、適切な倍率の対物レンズ10が選択される。
【0103】
また、フォーカシングダイヤル8aを操作すると、対物レンズ10が上方に移動し、対物レンズ10がサンプルSに近接し、フォーカシングすることができる。
【0104】
これによってサンプルSの光学的観察が行われ、この結果に応じて、プローブ顕微鏡による測定が行われる。
【0105】
プローブ顕微鏡による測定を行うには、サンプルSの表面とプローブ21の位置を、倒立顕微鏡8の光学像を見ながら、プローブ位置調整機構140で位置合わせをする。
【0106】
次に、レーザ光源44およびフォトディテクタ45の位置を調整する。すなわち、レーザ光源44から照射したレーザ光Lが、カンチレバー20の上面で反射し、フォトディテクタ45に確実に入射するよう位置調整を行う。
【0107】
尚、このプローブ変位検出手段であるレーザ光源とフォトディテクタの調整は、初めに行っておいてもよい。
【0108】
その後、側面からサンプルSとプローブ21を目視観察しながら、モーター123を駆動して、Z軸粗動機構部110により、カンチレバー20を粗動移動させて、カンチレバー20をサンプルに接近させる。そして、カンチレバー20先端部のプローブ21をサンプルSの表面近傍に位置させる。
【0109】
この状態から、不図示の加振手段により、カンチレバー20を介してプローブ21を、Z方向に沿って所定の周波数および振幅で振動させる。
【0110】
そして、図3に示すX側圧電素子61およびY側圧電素子54に電圧を印加する。すると、X側圧電素子61およびY側圧電素子54が伸縮し、X側変位拡大機構部62およびY側変位拡大機構部55を介して、内フレーム49がXY方向に微動する。これにより、プローブ21がサンプルS上を所定の走査速度でラスタースキャンする。
【0111】
このとき、内フレーム49がXY方向に微動すると、X方向ターゲット81およびY方向ターゲット78がそれぞれX方向、Y方向に微動し、そのX、Y方向の微動量がX方向センサ81およびY方向センサ78によって検出される。これら検出結果は演算部83に入力されて、カンチレバー20のXY方向の微動量の誤差が算出され、この算出結果が制御部84に入力される。このように、XY方向の微動量を補正することによって、X側圧電素子61やY側圧電素子54のヒステリシスやクリープに影響されず、XY方向に線形に動作する。
【0112】
走査の際、サンプルSの凹凸に応じて、プローブ21とサンプルSの表面との距離が変化すると、原子間力や間欠的な接触力によりプローブ21が斥力または引力を受けるので、カンチレバー20の振動状態が変化し、振巾や位相が変化する。この振巾や位相の変化は、フォトディテクタ45の異なる2対の分割面の出力差(DIF信号と呼ぶ)として検出される。このDIF信号は、不図示のZ電圧フィードバック回路に入力される。そして、Z電圧フィードバック回路は、DIF信号により振巾や位相が同じになるように、図4に示すZ側圧電素子90に電圧を印加する。
【0113】
Z側圧電素子90は、電圧が印加されることにより高速で伸縮を繰り返す。Z側圧電素子90が伸縮すると、延出部87を介してサンプルホルダ16が非常に高い周波数でZ方向に移動し、サンプルホルダ16上のサンプルSがZ方向に移動する。これにより、上記走査の際、プローブ21とサンプルSの表面との間の距離が常に一定に保たれる。
【0114】
また、サンプルホルダ16がZ方向に移動すると、Z方向微動量検出部108により、機構本体部86の微動量が検出され、この検出結果に応じて、サンプルホルダ16のZ方向の微動量の誤差が算出される。そして、その算出結果が制御部84に入力され、Z方向に線形に動作させることができる。
【0115】
なお、Z方向移動量検出部108により微動量を検出し、それをSPM像の高さ情報として表示させてもよい。この場合、より高速走査が可能となる。
【0116】
このようにして、X側、Y側、Z側圧電素子61、54、90に印加した電圧、またはX方向、Y方向、Z方向センサ81、78、108の信号を制御部84に入力し、画像化することでサンプルSの表面の形状像を測定することができる。また、プローブ21とサンプルSとの間に働くいろいろな力や物理作用を測定することで、粘弾性、サンプルSの表面電位分布、サンプルSの表面の漏れ磁界分布、近接場光学像等の各種の物性情報の測定を行うことができる。
【0117】
以上のように走査型プローブ顕微鏡を構成することで、装置剛性を確保でき、その結果、音や床振動の影響が抑制されて走査型プローブ顕微鏡の測定精度が向上する。
【0118】
また、対物レンズや対物レンズ交換機能、高効率の照明装置など市販の顕微鏡が有する機能をそのまま用いることができるため、システムの取扱も容易となる。
【実施例2】
【0119】
次に、本発明の第2の実施例について説明する。
【0120】
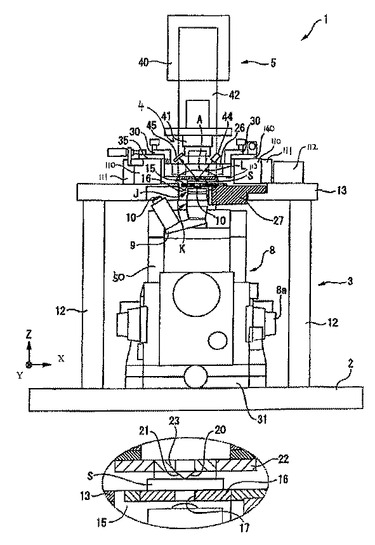
図6は、本発明の第2の実施例を示したものである。
【0121】
図6において、図1から図5に記載の構成要素と同一部分については同一符号を付し、その説明を省略する。
【0122】
この実施例と上記第1の実施例とは基本的構成は同一であり、以下の点において異なるものとなっている。
【0123】
すなわち、本実施例における走査型プローブ顕微鏡1は、正立顕微鏡と組み合わせたものである。すなわち、正立顕微鏡8には光源40が設けられ、光源40の上端にはコンデンサレンズ41が設けられている。また、コンデンサレンズ41の上方にはステージ微動機構部27が設けられている。ステージ微動機構部27は円筒状のZ側圧電素子34からなり、Z側圧電素子34はZ方向に向けて設置されている。Z側圧電素子34には、Z方向に向けられた筒孔(ステージ側貫通孔)33が形成されており、この筒孔33に光源40からの照明光が通されるようになっている。
【0124】
また、プローブ微動機構部26の上方には、観察位置Kに対物レンズ10が設けられている。ここでの観察位置Kとは、プローブ微動機構部26の上方から、カンチレバー20または試料Sを観察する位置をいう。対物レンズ10は、観察位置Kにおいて上下動するようになっており、下方に移動させると、プローブ微動機構26の内部空間に挿入されるようになっている。
【0125】
このような構成のもと、光源40からの照明光は、筒孔33を通って試料Sを透過する。また、対物レンズ10を下方に移動させて、プローブ側貫通孔70の方向に挿入すると、対物レンズ10はカンチレバー20または試料Sに近接する。
【0126】
以上より、ステージ微動機構部27には筒孔33が設けられ、この筒孔110に照明光を通していることから、照明光の進行を邪魔することなく、高精度に測定することができる。
【0127】
ここで、Z軸粗動機構110とXYステージ140は第一の実施例と同じものを用いており、Z軸粗動機構110の中空開口部113内に走査型プローブ顕微鏡ユニット4が配置されているため、光軸方向の高さを薄く構成でき、対物レンズ10を、中空開口部113内のプローブ側微動機構26内部に挿入することができることから、カンチレバー20や試料Sに対物レンズ10を一層近接させることができ、高NAの対物レンズを設けて高精度な測定を行うことができる。
【0128】
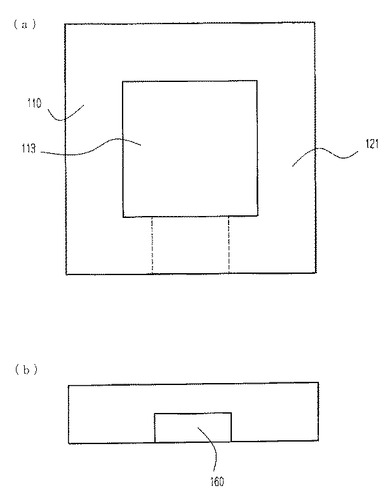
本発明の走査型プローブ顕微鏡のZ軸粗動機構の構造は第一の実施例、第二の実施例の形状に限定されず例えば図7に示すように平面視「U」字形状のものなども考えられる。また、外周部から内周部への切欠は必ずしも上面から底面にかけて貫通する必要はない。図8はこの場合の一実施例で、図8(a)はZ軸粗動機構形状を表す平面図、図8(b)は正面図である。この図のように正面視して底面から高さ方向の中間部分までのみが外周から内周にかけて切欠160を持っているような構造でもよい。また、Z軸粗動機構とXYステージの機構は上記実施例に限定されるものではない。
【0129】
また、プローブをZ軸粗動機構により動作させるようにしたが、サンプル側をZ軸微動機構により動作させて、プローブに近づける構成でもよい。
【0130】
また、光学顕微鏡は必須の要素ではなく、走査型プローブ顕微鏡のみでもよい。また、光学顕微鏡と組み合わせ場合には、光学顕微鏡のフレームに走査型プローブ顕微鏡ユニットを載せてもよい。
【0131】
また、上記第1および第2の実施例では、X側圧電素子61、Y側圧電素子54およびZ側圧電素子90を積層型の圧電素子としたが、これに限ることはなく、適宜変更可能である。例えば、スタック型の圧電素子としたり、またはボイスコイルなどを用いたりすることも可能である。
【0132】
また、プローブ微動機構部26とステージ微動機構部27を一体構造としてもよい。
【0133】
また、DFMモードによる観察としたが、これに限ることはなく、コンタクトAFMなどの種々のモードに適用可能である。さらに、近接場顕微鏡にも適用することができる。近接場顕微鏡に適用すると、高NAの対物レンズを使用することができるため、近接場信号の集光効率を向上させることができる。
【図面の簡単な説明】
【0134】
【図1】本発明に係る走査型プローブ顕微鏡の第1実施例を示す構成図であり、(a)は正面図、(b)は(a)において符号Aによって示す領域の拡大図である。
【図2−1】図1に示す走査型プローブ顕微鏡のZ軸粗動機構とXYステージの構成図であり、(a)は平面図。
【図2−2】(b)は正面図、(c)は(a)のB−B線断面図である。
【図3】図1に示す走査型プローブ顕微鏡のプローブ微動機構部を示す平面図である。
【図4】図1に示す走査型プローブ顕微鏡のサンプル微動機構部を示す平面図である。
【図5】図3に示す走査型プローブ顕微鏡のサンプル微動機構部を示す底面図である。
【図6】本発明に係る走査型プローブ顕微鏡の第2実施例を示す正面図である。
【図7】本発明に係る走査型プローブ顕微鏡の第3実施例のZ軸粗動機構の形状を示す平面図である。
【図8】本発明に係る走査型プローブ顕微鏡の第4実施例のZ軸粗動機構を示す構成図であり、(a)は平面図、(b)は正面図である。
【図9】従来の走査型プローブ顕微鏡の第一の概観図である。
【図10】従来の走査型プローブ顕微鏡の第二の概観図であって、(a)は概観図、(b)は(a)の走査型プローブ顕微鏡部の詳細図である。
【符号の説明】
【0135】
1 走査型プローブ顕微鏡
2 除振台
3 走査型プローブ顕微鏡ユニットベース部
4 走査型プローブ顕微鏡ユニット
5 照明装置
8 光学顕微鏡部(倒立顕微鏡)
9 レボルバ
10 対物レンズ
12 支柱
13 ベースプレート
16 サンプルホルダ
20 カンチレバー
21 プローブ
22 カンチレバーホルダー
26 プローブ微動機構
27 サンプル微動機構
30 クランク固定部
31 XYステージ
40 光源
41 コンデンサレンズ
42 照明用支柱
44 レーザ光源(プローブ変位検出手段)
45 フォトダイオード(プローブ変位検出手段)
50 光学顕微鏡フレーム部
110 Z軸粗動機構部
111 ベース
112 モーター駆動部
113 中空開口部
117 水平移動部
119 垂直移動部
121 上面移動テーブル
123 ステッピングモータ
125 ボールネジ
140 XYステージ(プローブ位置調整機構)
141 X移動テーブル
142 Y移動テーブル
S サンプル
【技術分野】
【0001】
本発明は、試料の表面にプローブを近接させて走査することにより、サンプルの表面形状や粘弾性等の各種の物性情報を測定する走査型プローブ顕微鏡に関するものである。
【背景技術】
【0002】
金属、半導体、セラミック、樹脂、高分子、生体材料、絶縁物等の試料を微小領域にて測定し、試料の粘弾性等の物性情報や試料の表面形状の観察等を行う装置として、走査型プローブ顕微鏡(SPM:Scanning Probe Microscope)が知られている。
【0003】
これら走査型プローブ顕微鏡の中には、サンプルが載置されるサンプルホルダと、サンプルの表面に近接させる先端にプローブを有し、試料の表面に近接させるカンチレバーを備えたものが周知となっている(例えば、特許文献1参照)。そして、これらサンプルホルダとプローブとをサンプル面内のX、Y方向に相対的に走査させ、この走査中にカンチレバーの変位量を測定しながら、サンプルホルダまたはプローブをZ方向に動作させて、サンプルとプローブの距離制御を行うことにより、表面形状や各種物性情報を測定するようになっている。
【0004】
また、光学顕微鏡と走査型プローブ顕微鏡を組み合わせて、光学顕微鏡による明視野観察、暗視野観察、微分干渉観察、位相差観察、蛍光観察などから得られる情報からサンプル表面上の被測定箇所を特定し、被測定箇所にプローブを位置決めして、走査型プローブ顕微鏡により、さらに高分解能で表面形状や各種物性情報の測定が行われている。(例えば、特許文献2参照、特許文献3参照)
図9に第一の従来の走査型プローブ顕微鏡の構成を示す。
【0005】
この従来技術では、支持基材220上に、先端にプローブを有するカンチレバー224と、カンチレバーの変位を検出するための光てこ光学系、および、カンチレバー224をサンプルに対してスキャンさせるための三軸微動機構が配置され走査型プローブ顕微鏡ユニットが構成されている。
【0006】
光てこ光学系は、半導体レーザ271と、コリメートレンズ(図示せず)、偏光ビームスプリッタ282、1/4波長板283、反射鏡275、277、278、集光レンズ284、4分割フォトダイオードよりなるポジションセンサ273により構成される。半導体レーザ271から出た出射光は、コリメートレンズにより平行光に変換される。変換された平行光は偏光ビームスプリッタ282を通過する。このとき、偏光ビームスプリッタ282にp偏光成分が入射するように半導体レーザ271の向きを調整しておく。偏光ビームスプリッタ282を出たp偏光成分は1/4波長板283を通過して円偏光に変換される。そのあと、反射板275で光路を変換し、集光レンズ284を通り、反射板277、反射板278で光路を変換して、カンチレバー224の背面に集光される。カンチレバー224からの反射光は、前述の光路と逆の光路をとおり、1/4波長板283によりs偏光に変換され、偏光ビームスプリッタ282に入射する。s偏光成分は、偏光ビームスプリッタ282を透過せずに反射して光路を曲げられて、4分割フォトディテクタ273に入射する。カンチレバー224が撓んだ場合、4分割フォトディテクタ273上のスポットが動き、4分割フォトディテクタ273の出力信号によりカンチレバー224の撓みを検出することができる。
【0007】
カンチレバー224はX方向微動機構251、Y方向微動機構222、Z方向微動機構223より構成される3軸微動機構のZ方向微動機構223に固定されており、X方向微動機構251とY方向微動機構222によりサンプル面内でスキャンされ、Z方向微動機構223によりサンプル表面とプローブ間の距離制御が行われる。
【0008】
ここで、支持基材220には2本のマイクロメータ261とステッピングモータ262に接続された1本の差動マイクロメータ263が取り付けられてZ軸粗動機構が構成される。Z軸粗動機構はそれぞれのマイクロメータのヘッドの先端部がベースプレート(図示せず)上に載せられ走査型プローブ顕微鏡ユニットが3点で支持されている。プローブをベースプレート上に置かれたサンプルに近接させる場合には、ユニットの側面からプローブとサンプルを目視観察しながら、あらかじめ3本のマイクロメータ261、263で両者を大まかに近接させたあと、光てこ光学系の信号を見ながら、ステッピングモータ262で差動マイクロメータ263を少しづつ動かして、プローブとサンプルを近接させる。
【0009】
このように構成された走査型プローブ顕微鏡ユニットは、市販の倒立型顕微鏡のベースプレート上に載置してベースプレート上のサンプルの測定に使用されている。
【0010】
次に、図10(a)に、光学顕微鏡を備えた走査型プローブ顕微鏡の第二の従来例の概観図を示す。
【0011】
光学顕微鏡として用いた倒立顕微鏡は、一般に市販されている倒立顕微鏡を使用している。この倒立顕微鏡のフレーム330に取り付けられたベースプレート311上に支柱313を介して走査型プローブ顕微鏡ユニット314が取り付けられている。
【0012】
走査型プローブ顕微鏡ユニット314の構成を図10(b)に示す。走査型プローブ顕微鏡ユニット314は、先端にプローブ315が設けられたカンチレバー328を保持するためのカンチレバーホルダ326と、カンチレバー328の変位を検出するための変位検出機構318、ベースプレート311上に置かれたサンプル342とプローブ315を相対的にスキャンさせるための三軸微動機構316により構成される。
【0013】
三軸微動機構316は円筒型の圧電素子により構成されて、圧電素子を伸縮させることで、プローブ315とサンプル342間の距離を調整し、圧電素子を撓ませることでプローブ315をサンプル342面内で走査させる。円筒型圧電素子の先端には光てこ方式の変位検出機構318が固定され、さらに変位検出機構318に固定されたカンチレバーホルダ326を介してカンチレバー328が固定されている。変位検出機構318は半導体レーザ320からの出射光をダイクロイックミラー322でカンチレバー328方向に曲げて、カンチレバー328の背面に照射し、カンチレバー328の背面からの反射光をスポット位置センサ324で受光して、スポット位置センサ324の信号によりカンチレバー328の撓み量を検出する。
【0014】
走査型プローブ顕微鏡ユニット314はコンデンサレンズ316を有する倒立顕微鏡の照明装置317と、サンプル342下面側に配置された対物レンズ332の間に配置されており、コンデンサレンズ316からの照明光は円筒型圧電素子が固定される支持部319の透過孔321、円筒型圧電素子316の内部、光てこ系のダイクロイックミラー322を透過してサンプル342に照射され、サンプル342を透過した光が対物レンズ332により集光されて、プローブ315とサンプル342の像が観察される。
【0015】
ここで、走査型プローブ顕微鏡ユニット314は支柱313に取り付けられており、通常支柱部313に倒立顕微鏡の光軸方向に沿って、プローブ315をサンプル342に近接させるZ軸粗動機構が設けられる。
【特許文献1】特開2000−346784号公報
【特許文献2】特開平10−19906号公報
【特許文献3】特開平9−166602号公報
【発明の開示】
【発明が解決しようとする課題】
【0016】
しかしながら、図9に示した第一の従来技術の走査型プローブ顕微鏡ユニットでは、プローブとサンプルを近接する場合に、差動マイクロメータ263のヘッド部をステッピングモータ262で上下させると、2本のマイクロメータ261のヘッドを支点として、プローブが円弧運動で動作する。このため、サンプルとプローブ先端の位置がずれてしまい位置合わせが困難である。
【0017】
また、走査型プローブ顕微鏡ユニットの大きさに比較して3本のマイクロメータ261、263のヘッド部は直径が小さいため、走査型プローブ顕微鏡ユニットの支持剛性が低く振動により測定データに振動ノイズが載ってしまう。また、測定場所の温度変化により、マイクロメータのヘッド部や走査型プローブ顕微鏡ユニットが熱膨張し、それにより測定精度が悪化する。
【0018】
また、図10のように構成された第二の従来技術の走査型プローブ顕微鏡では、走査型プローブ顕微鏡ユニット314が支柱313に対して片持ち支持された構成であるために、支持剛性が低く振動により測定データにノイズが載ってしまう。
【0019】
また、走査型プローブ顕微鏡と組み合わせた倒立顕微鏡の機能を十分に発揮して、走査型プローブ顕微鏡による測定前のプローブとサンプルの位置合わせ精度を上げるためには、対物レンズを交換可能とし、低倍率の対物レンズから、高倍率の対物レンズに交換して測定を行う必要がある。高倍率の対物レンズでは、作動距離は数mm〜数百μmと微小であり、また、照明用コンデンサレンズの作動距離も十分な照明効率を確保するためには開口数0.5程度のコンデンサレンズをサンプルに対して約30mm程度まで接近させる必要がある。
【0020】
図10の従来例では走査型プローブ顕微鏡ユニットと支柱に設けられたZ軸粗動機構の光軸方向の高さが高くなるため、コンデンサレンズをサンプルに近づけることができない。このため、作動距離が長く開口数の小さいコンデンサレンズしか使用できず、せっかく倒立顕微鏡と組み合わせても倒立顕微鏡の機能を十分に使用できず、光学顕微鏡により被測定箇所への位置決めが困難であった。
【0021】
このような問題点に鑑みて、本発明では、支持剛性が高く、サンプル面内に垂直な方向に直進しながら近接可能なZ軸粗動機構を持つ走査型プローブ顕微鏡を提供する。このとき、プローブとサンプルの近接状況を確認するために側面から両者の観察を行えるような構造とする。
【0022】
さらに、本発明では光学顕微鏡と組み合わせた場合に、対物レンズや照明装置をサンプルに十分近接できるように薄型のユニットで構成できるようなZ軸粗動機構を持つ走査型プローブ顕微鏡を提供する。
【0023】
さらに、本発明では測定環境により温度ドリフトの影響を受けないような走査型プローブ顕微鏡を提供する。
【課題を解決するための手段】
【0024】
上記課題を解決するために、本発明では以下の手段により走査型プローブ顕微鏡を構成した。
【0025】
プローブとサンプルホルダ上に載置されたサンプル間の高さ方向の距離を制御しながら、サンプル面内で前記プローブとサンプルを相対的に移動させる走査型プローブ顕微鏡において、前記プローブとサンプル表面とを近接させるZ軸粗動機構を、サンプル面内と垂直な方向に移動する上面移動テーブルを有し、前記Z軸粗動機構に上面から低面にかけて中空の開口部を設け、中空開口部の周囲を取り囲む前記Z軸粗動機構側面の外周部から内周部にかけて切欠を設けた構造とし、前記中空開口部に前記プローブまたは前記サンプルホルダのいずれかを含む走査型プローブ顕微鏡のユニットを配置し、前記走査型プローブ顕微鏡ユニットを前記上面移動テーブルに固定し、プローブとサンプル表面を近接できるようにした。
【0026】
このZ軸粗動機構は、上面移動テーブル面内と平行な方向に摺動可能で第一の傾斜部を有する水平移動部と、概第一の傾斜部と摺動可能に連結される第二の傾斜部を有し前記上面移動テーブルが固定され前記上面移動テーブル面内での動きが拘束され前記上面移動テーブルと直交する方向に移動可能に配置された垂直移動部から構成され、前記水平移動部を上面移動テーブルと平行な方向に移動させ、前記第一の傾斜部により前記第二の傾斜部を押すことにより前記上面移動テーブルをテーブル面に垂直方向に移動させるように構成した。
【0027】
また、前記Z軸粗動機構の上面移動テーブル上に、上面移動テーブル面内で移動可能な第二のステージを固定し、該第二のステージを介して、前記走査型プローブ顕微鏡ユニットを前記上面移動テーブルに固定した。
【0028】
また、前記中空開口部に顕微鏡用照明装置の一部または全部が配置されるようにした。このとき照明装置は開口数0.5以上のコンデンサレンズが含まれるようにした。
【0029】
また、前記走査型プローブ顕微鏡ユニットに取り付けられたプローブに対向する位置に、透過孔を有するサンプルホルダを配置し、該サンプルホルダに対して前記プローブと対向する側に対物レンズを配置した。
【0030】
また、前記走査型プローブ顕微鏡ユニットに取り付けられたサンプルホルダに対向する位置にプローブを配置し、該プローブに対して前記サンプルホルダと対向する位置に対物レンズを配置した。
【0031】
また、前記中空開口部に対物レンズまたは集光レンズを配置した。
【0032】
さらに、本発明では、前記Z軸粗動機構が設置されるベースプレートにサンプルホルダまたはプローブを固定し、前記サンプルホルダおよび前記ベースプレートおよび前記Z軸粗動機構および前記走査型プローブ顕微鏡ユニットを実質的に同一の材質で構成した。さらに前記材質を、熱膨張係数が4×10-6/K以下の低膨張材料とし、前記サンプルホルダおよび前記ベースプレートおよび前記Z軸粗動機構および前記走査型プローブ顕微鏡ユニットの全質量のうち、80%以上が同一の材質で構成されるようにした。
【発明の効果】
【0033】
以上のように走査型プローブ顕微鏡を構成することで、中空開口部を取り囲む上面移動テーブル面で広範囲に亘り走査型プローブ顕微鏡ユニットを支持することができるため支持剛性を高くすることができ、走査型プローブ顕微鏡の測定像への振動の影響を低減できる。
【0034】
また、Z軸粗動機構の外周部から内周部に切欠を設けているので、側面からプローブとサンプルの状態を観察でき近接状況を目視観察できる。また、第二のステージによりプローブをサンプル面内で移動できるため、プローブの面内の位置合わせも容易に行うことが可能で、操作性が向上する。
【0035】
さらに、Z軸粗動機構が平面状に展開されたZステージ構造としているため、ユニット全体の高さを薄くでき、高い開口数のコンデンサレンズや対物レンズをサンプルに近づけることが可能で光学顕微鏡の観察性能が上がり、位置決め精度が向上する。
【0036】
また、熱により各材料が膨張してもお互いに膨張量を補償することができ、熱によるドリフトの影響が抑制されて、走査型プローブ顕微鏡の測定精度が向上する。
【発明を実施するための最良の形態】
【0037】
以下、本発明の走査型プローブ顕微鏡について、図面を参照して説明する。
【実施例1】
【0038】
本実施例においては、カンチレバーを共振周波数付近で振動させながらサンプルに近づけ、振巾や位相の変化量により、プローブと試料間の距離を一定に保ちながら走査するDFMモード(Dynamic Force Mode)による測定を行うものとする。
【0039】
図1に本発明の第一実施例による走査型プローブ顕微鏡について、(a)は走査型プローブ顕微鏡の正面図であり、(b)は(a)において符号Aによって示す領域の拡大図を示す。
【0040】
この走査型プローブ顕微鏡1は、市販の倒立顕微鏡と組み合わせたものであり、図1(a)および(b)に示すように、除振台2に設置された走査型プローブ顕微鏡ユニットベース部3と、この走査型プローブ顕微鏡ユニットベース部3のベースプレート13に設けられた走査型プローブ顕微鏡ユニット4およびZ軸粗動機構110およびZ軸粗動機構の上面に設けられたXYステージ140と、走査型プローブ顕微鏡ユニット4の下方に設けられた光学顕微鏡部(倒立顕微鏡)8と、この走査型プローブ顕微鏡ユニット4の上方に設けられ、光学顕微鏡部8のフレーム部50に連なる照明装置5とを備えている。
【0041】
光学顕微鏡部8は、XYステージ31を介して除振台2に載置されている。このXYステージ31は光学顕微鏡部8に設置された対物レンズ10の光軸中心にサンプルを位置合わせするためのサンプル位置調整機構として作用する。
【0042】
走査型プローブ顕微鏡ユニットベース部3は、除振台2から垂直に延びる4本の支柱12により4隅を支持された、平板状のベースプレート13を備えて構成されるものである。このベースプレート13は熱膨張を抑えるためFe−36Niの成分からなる低膨張材料であるインバー材(熱膨張係数0.5〜2×10-6/K)を用いている。
【0043】
ここで、走査型プローブ顕微鏡ユニットベース部3は光学顕微鏡部8のフレーム部50には固定されておらず、光学顕微鏡部3に対して独立している。
【0044】
ベースプレート13の中央部には、ベースプレート開口部15が形成されており、このベースプレート開口部15内に、サンプルSが載置されるサンプルホルダ16が設けられており、このサンプルホルダ16の中央にはサンプルホルダ開口部17が形成されている。サンプルホルダ16は、後述するサンプル微動機構部27により、Z方向に沿って微動するようになっている。なお、Z方向とは、サンプルSの表面およびサンプルホルダ16に垂直な方向であって、光学顕微鏡を備えた走査型プローブ顕微鏡1の高さ方向をいう。
【0045】
サンプルホルダ16の上面には、上述の走査型プローブ顕微鏡ユニット4が設置されている。走査型プローブ顕微鏡ユニット4は、後述するプローブ微動機構部26を備えており、このプローブ微動機構部26には、左右と後ろ側に合計3箇所のクランク状のクランク固定部30が設けられている。そして、クランク固定部30により、プローブ微動機構部26は、その中心がサンプルホルダ開口部17に一致するようにXYステージ140を介してZ軸粗動機構110に固定されている。
【0046】
なお、プローブ微動機構部26およびサンプル微動機構部27は、走査型プローブ顕微鏡用三軸微動機構を構成するものである。
【0047】
プローブ微動機構部26の下面には、カンチレバー20を支持する大気中測定と溶液中測定兼用のカンチレバーホルダ22が設けられている。カンチレバーホルダ22の中央には、ガラスからなるガラスホルダ23が設けられている。
【0048】
このガラスホルダ23を用いて溶液中で測定を行う場合には、サンプルSとガラスホルダ23との間に、液の粘性による膜を形成させることにより、液中測定時の照明光の乱反射等を防止する。
【0049】
なお、カンチレバー20は、長尺状のものに限定されず、平面視して三角形状のものや、断面が円形で光ファイバーの先端を先鋭化して湾曲させた近接場顕微鏡用のベントプローブ、あるいはカンチレバーの代わりに走査型トンネル顕微鏡や近接場顕微鏡用のストレート型のプローブなども本発明に含まれる。
【0050】
カンチレバー20は、サンプルホルダ開口部17の上方に設けられている。カンチレバー20の先端には、先鋭化されたプローブ21が設けられており、後端は、カンチレバーホルダー22に固定されている。これにより、カンチレバー20は、プローブ21が設けられた先端側が自由端となるように片持ち支持されている。また、カンチレバー20は、不図示の加振手段により、Z方向に沿って所定の周波数及び振幅で振動され、さらに、プローブ微動機構部26により、サンプルホルダ16に対して、X、Y方向に微動するようになっている。なお、XY方向とは、サンプルSの表面およびサンプルホルダ16に平行な互いに直交する方向であって、Z方向と直交する方向をいう。さらに、X方向とは、光学顕微鏡付の走査型プローブ顕微鏡1の幅方向をいい、Y方向とは、走査型プローブ顕微鏡1の奥行方向をいうものとする。
【0051】
また、プローブ微動機構部26の近傍には、モーター駆動部112によってカンチレバー20をZ方向に粗動移動させるためのZ軸粗動機構部110が設けられており、Z軸粗動機構部110のベース111が走査型プローブ顕微鏡ユニットベース部3のベースプレート13に固定されている。このZ軸粗動機構部110の上面にはプローブ21をXY面内で移動させるプローブ位置調整機構として作用するXYステージ140が設けられており、このXYステージ140の上面に、走査型プローブ顕微鏡ユニット4の左右2箇所と後ろ側の合計3箇所設けられたクランク固定部30が固定されている。
【0052】
ここで、Z軸粗動機構110の詳細な構造を図2に示す。図2(a)はZ軸粗動機構の平面図、図2(b)は正面図、図2(c)は図2(a)のB−B線断面図である。
【0053】
なお、図2(c)は図2(a)のC−C線断面図をとった場合にもマイクロメータ146とアーム144を除き同一の形状である。また、各図面は、構成を理解しやすいように本来なら隠れ線で見える箇所を実線で示している箇所がある。
【0054】
このZ軸粗動機構110は、平面視「コ」の字形状をしている。即ち、平面視四角形のZ軸粗動機構110の中央部に上面から底面にかけて貫通した中空開口部113が設けられており、さらに、Z軸粗動機構110の周囲を取り囲む側面のうち正面の外周部から内周部の側面が貫通した切欠の構造となっている。
【0055】
このZ軸粗動機構110は、平面視「コ」の字形状のベース111を有し、同じく平面視「コ」の字形状でZ軸粗動機構110の左右に後方から正面にかけて第一の傾斜面114を有し左右の傾斜面の底面115がベース111にリニアガイド116により前後方向に摺動可能に固定された水平移動部117が設けられ、さらにZ軸粗動機構110の左右に正面側から後方にかけて第二の傾斜面118を有する垂直移動部119が前記第一の傾斜面114にリニアガイド120を介して傾斜面に沿って摺動可能に固定されている。前記垂直移動部119は、平面視「コ」の字状の上面移動テーブル121に固定されており、上面移動テーブル121はテーブルの4隅の高さ方向に配置されたクロスローラガイド122により高さ方向の移動以外の動きが拘束されている。
【0056】
Z軸粗動機構110の右側にはモータ駆動部112が設置されている。モータ駆動部112はステッピングモーター123とカップリング124、ボールネジ125、およびベアリングを内蔵したサポート126から構成される。
【0057】
ステッピングモータ123の出力軸123aにはカップリング124を介してボールネジ125のオネジのネジ軸125aが固定されている。オネジのネジ軸125aは末端と先端部がサポート内126のベアリングに回転可能に収納されている。オネジのネジ軸125aにはメネジが設けられて内部にベアリング球が内蔵されたボールネジナット125bがはめ込まれている。ボールネジナット125bにはアーム127が取り付けられて、アーム127は前述の水平移動部117に固定されている。この状態で、モータ123を回転させると、カップリング124を介してネジ軸125aが回転し、回転方向の動きを規制されたボールネジナット125bは前後方向に移動する。このとき、アーム127を介して、水平移動部117もベース111に取り付けられたリニアガイド116にガイドされ前後方向に動作する。
【0058】
水平移動部117が前後方向に動作すると、第一の傾斜面114が、垂直移動部119の第二の傾斜面118を押す。このとき、垂直移動部119に連結された上面移動テーブル121が水平方向の動きを規制されているため、上面移動テーブル121を高さ方向に直進させることができる。
【0059】
また、上面移動テーブル121面には、平面視「コ」の字状で左右方向に移動可能なX移動テーブル141と前後方向に動作可能なY移動テーブル142より構成されるXYステージ140が設けられている。X移動テーブル141は、上面移動テーブル121の前後に左右方向に沿って設けられたクロスローラーガイド143により左右方向に案内され、Y移動テーブル142は、Y移動テーブル142の左右に前後方向に沿って設けられたクロスローラガイド144により前後方向に案内される。X移動テーブル141、Y移動テーブル142には支点となるアーム145、146が固定されており、Z軸粗動機構110の上面移動テーブル121に固定されたマイクロメータ147によりX移動テーブル141は左右方向に押され、X移動テーブルに固定されたマイクロメータ148によりY移動テーブル142が前後方向に押される。各々のマイクロメータ147、148と対向する側には圧縮バネ149、150が設けられており、マイクロメータ147、148を動作させることで任意の位置にXYステージ140を位置決めすることができる。
【0060】
なお、ベース111、水平移動部117、垂直移動部118、上面移動テーブル121、X移動テーブル141、Y移動テーブル142はベースプレート13と同じく熱膨張を抑えるためFe−36Niの成分からなる低膨張材料であるインバー材(熱膨張係数0.5〜2×10-6/K)を用いている。
【0061】
以上のようにZ軸粗動機構110とXYステージ140を構成し、Z軸粗動機構110の中空開口部113にプローブを有する走査型プローブ顕微鏡ユニット4を配置する場合、走査型プローブ顕微鏡ユニット4は左右と後ろの3箇所荷に設けられたクランク固定部30で、XYステージ140を介してZ軸粗動機構110に固定されるためZ軸粗動機構110への支持剛性が高く、振動の影響が抑制されて走査型プローブ顕微鏡の測定データの質が向上する。
【0062】
また、Z軸粗動機構110とXYステージ140の正面側が外周部から内周部にかけて開口となっているので、プローブ21とサンプルSを側面から観察することができ、また、サンプル交換の際にも側面からサンプルを置くことができるため操作性が向上する。
【0063】
図3に図1のプローブ微動機構部26部分を拡大した平面図を示す。
【0064】
本実施形態におけるプローブ微動機構部26は、図3に示すように、幅寸法の異なる矩形枠状の外フレーム48および内フレーム49を備えており、これら外フレーム48および内フレーム49は、インバー材により平面状に形成されている。また、外フレーム48と内フレーム49とは、X駆動部(第1の駆動部)52とY駆動部(第1の駆動部)51とを介して、互いに同心上に連結されており、外フレーム48および内フレーム49の上面は面一にして配されている。X駆動部52は、外フレーム48に形成されたY方向に延びるX側空洞部60内に設置されており、Y駆動部51は、同様にX方向に延びるY側空洞部57内に設置されている。
【0065】
X駆動部52は、Y方向に向けられた積層型のX側圧電素子61を備えている。X側圧電素子61には、その周囲を取り囲むように、上面視して略ひし形のX側変位拡大機構部62が設けられている。そして、X側変位拡大機構部62は、X側連結部63を介して、内フレーム49に連結されている。
【0066】
また、Y駆動部51は、X方向に向けられた積層型のY側圧電素子54を備えている。Y側圧電素子54には、上記と同様に、略ひし形のY側変位拡大機構部55が設けられており、Y側変位拡大機構部55は、Y側連結部56を介して、内フレーム49に連結されている。
【0067】
内フレーム49の四隅には、平行バネ67が設置されている。
【0068】
そして、X側圧電素子61およびY側圧電素子54に電圧を印加することにより、X側変位拡大機構部62およびY側変位拡大機構部55が、それぞれX方向、Y方向に拡大縮小し、これにより内フレーム49をXY方向に微動できるようになっている。
【0069】
また、内フレーム49の底面には、略矩形の基板68が設けられている。基板68の中央には、Z方向にプローブ側貫通孔70が形成されている。そして、このプローブ側貫通孔70に、図1に示す光源40からの照明光が通過するようになっている。
【0070】
なお、基板68の下面に、上述したように、カンチレバーホルダ22を介してカンチレバー20が設けられており、内フレーム49のXY方向の微動により、基板68およびカンチレバーホルダ22とともに、カンチレバー20もXY方向に微動するようになっている。
【0071】
また、外フレーム48および内フレーム49の上面には、Y方向微動量検出部73およびX方向微動量検出部74が設けられている。Y方向微動量検出部73は、内フレーム49に固定されX方向に延びるY方向ターゲット77と、外フレーム48に固定され、Y方向ターゲット77のY方向の移動量を検出するY方向センサ78とを備えている。
【0072】
また、X方向微動量検出部74は、同様にして内フレーム49に固定されY方向に延びるX方向ターゲット80と、外フレーム48に固定されX方向ターゲット80のY方向の移動量を検出するX方向センサ81とを備えている。これらY方向センサ78およびX方向センサ81としては、静電容量センサが用いられるが、これに限定されるものではなく、ひずみゲージや光学式変位系、差動トランスなどでもよい。
【0073】
このような構成のもと、内フレーム49がX方向に微動すると、X方向ターゲット80もX方向に微動し、そのX方向の微動量をX方向センサ81が検出するようになっている。また、内フレーム部49がY方向に微動すると、Y方向ターゲット77もY方向に微動し、そのY方向の微動量をY方向センサ78が検出するようになっている。すなわち、X方向センサ81は、X方向ターゲット80および内フレーム部49を介して、カンチレバー20のX方向の微動量を検出し、Y方向センサ78は、またY方向ターゲット77および内フレーム部49を介して、カンチレバー20のY方向の微動量を検出する微動量検出手段として機能するものである。
【0074】
X方向センサ81およびY方向センサ78は、それぞれ演算部(算出手段)83に電気的に接続されており、X方向センサ81およびY方向センサ78からの検出結果が、演算部83に入力されるようになっている。演算部83は、検出結果に応じて、印加された電圧と微動量とによって、カンチレバー20のXY方向の微動量の誤差を算出するようになっている。すなわち、演算部83は算出手段として機能するものである。さらに、演算部83は、各種制御を行う制御部84に電気的に接続されており、算出結果を制御部84に入力するようになっている。そして、この制御部84によって、印加電圧に対して、プローブ微動機構部27が線形に動作するように制御される。
【0075】
また、プローブ微動機構部26には、図1に示すように、プローブ変位検出手段としてレーザ光を発するレーザ光源44と、このレーザ光源44からのレーザ光を受光し、例えば4分割されたフォトディテクタ45とが設けられている。これらレーザ光源44およびフォトディテクタ45は、カンチレバー20の斜め上方に互いに対向して配置されている。そして、レーザ光源44から出射されたレーザ光が、カンチレバー20の上面に到達してそこで反射し、その反射光がフォトディテクタ45に到達するようになっている。
【0076】
また、プローブ微動機構部26の上方には、上述の照明装置5が設られている。照明装置5は、照明光を発する光源40と、この光源40からの照明光を集光するためのコンデンサレンズ41(開口数0.52、作動距離30mm)とを備えている。コンデンサレンズ41は、倒立顕微鏡部8のフレーム部50に連なる照明用支柱42によって、プローブ微動機構部26の中心上方に配されて、プローブ微動機構部26に対して上下動可能に支持されている。なお、走査型プローブ顕微鏡ユニットベース部3には照明装置5は固定されていない。
【0077】
さらに、本実施例におけるサンプル微動機構部27は、図4および図5に示すように、略長方形状に形成された機構本体部86と、この機構本体部86から、機構本体部86の厚さ方向(すなわちZ方向)に交差する方向(すなわちX方向)に延出する延出部87とを備えている。機構本体部86と延出部87はインバー材により構成される。
【0078】
延出部87の厚さ寸法Rは、機構本体部の厚さ寸法Mよりも小さく設定されている。そして、延出部87の上面と機構本体部86の上面とは略同一にされており、これにより、延出部87の下方には、スペースJが設けられている。
【0079】
延出部87には、Z方向に向けられたサンプルホルダ側貫通孔109が形成されており、このサンプルホルダ側貫通孔109内に、上述のサンプルホルダ16が設けられている。
【0080】
機構本体部86には、延出部87の延出方向と反対方向に延びる本体固定部91が設けられている。本体固定部91は、図1に示すテーブル13の所定の位置に固定されており、これにより、機構本体部86が片持ち支持されている。
【0081】
また、機構本体部86の内部に、空洞部93が設けられている。空洞部93の上内壁部94のX方向の両端のうち、本体固定部91が設けられた方の端部には、第1平行バネ101が設けられており、延出部87が設けられた方の端部には、第2平行バネ102が設けられている。一方、下内壁部97のX方向の両端のうち、延出部87が設けられた方の端部には、第3平行バネ103が、本体固定部91が設けられた方の端部には、第4平行バネ104が設けられている。また、第2平行バネ102の近傍には、上内壁部94から下方に向けて延びる下方壁部95が設けられており、第4平行バネ104の近傍には、下内壁部97から上方に向けて延びる上方壁部96が設けられている。すなわち、下方壁部95および上方壁部96が、互いに反対方向に延ばされて対向して配置されている。
【0082】
そして、これら下方壁部95と上方壁部96との間に、一端が下方壁部95に固定され、他端が上方壁部96に固定されて、X方向に向けられた積層型のZ側圧電素子90が配置され、Z駆動部(第2の駆動部)85が構成される。
【0083】
Z駆動部85は、図3で上述したX駆動部52およびY駆動部51とは、物理的に分離して別個に設けられたものであり、それぞれ独立して機能するものである。
【0084】
さらに、機構本体部86の下端には、X方向に延びる底壁部107が設けられている。この底壁部107のX方向の両端のうち、本体固定部91が設けられた方の端部は、機構本体部86の側壁に一体的に固定されており、延出部87が設けられた方の端部は、自由端となっている。この底壁部107の先端部には、演算部83に接続されたZ方向微動量検出部108が設けられている。Z方向微動量検出部108には、静電容量センサが用いられるが、これに限定されるものではなく、ひずみゲージや光学式変位系、差動トランスなどでもよい。
【0085】
このような構成のもと、Z側圧電素子90に電圧を印加すると、Z側圧電素子90が伸縮するようになっている。そして、Z側圧電素子90が伸びると、下方壁部95および上方壁部96がX方向外方に押圧され、上方壁部96は固定端付近を中心に図4における時計方向に回転するとともに、下方壁部95も固定端付近を中心に時計方向に回転し、結果として、第1から第4の平行バネ101、102、103、104に案内されて、延出部87がZ方向に移動し、延出部87に連結されたサンプルホルダ16がZ方向に移動するようになっている。このとき、Z方向微動量検出部108により、機構本体部86の微動量が検出されるようになっている。すなわち、Z方向微動量検出部108は、Z駆動部の底面の動きを検出し、機構本体部86を介して、サンプルホルダ16のZ方向の微動量を検出する微動量検出手段として機能するものである。そして、演算部83が、Z方向微動量検出部108の検出結果に応じて、印加された電圧と実際の微動量とによって、サンプルホルダ16のZ方向の微動量の誤差を算出するようになっている。この算出結果は制御部84に入力され、この制御部84によって、印加電圧に対して、ステージ微動機構部27が線形に動作するように制御される。
【0086】
なお、Z方向については、単にZ方向微動量検出部108により微動量を検出し、それを走査型プローブ顕微鏡像の高さ上方として表示させてもよい。
【0087】
このように構成されたサンプル微動機構27は、小型かつ高剛性であり、プローブ微動機構部26に比べて共振周波数が高く高速動作が可能となっている。
【0088】
さらに、本実施例においては、図1に示すように、スペースJに対物レンズ10が設けられている。すなわち、倒立顕微鏡部8の上端に、レボルバ(配置変更手段)9が設けられており、このレボルバ9に、それぞれ倍率の異なる複数の対物レンズ10が設けられている。そして、レボルバ9を回すことにより、複数の対物レンズ10の配置が変更されるようになっており、複数の対物レンズ10をスペースJ内の観察位置Kに選択的に配置することができるようになっている。
【0089】
ここでの観察位置Kとは、サンプルホルダ16の下方であって、サンプルホルダ開口部17に一致する位置をいい、試料Sを観察するための位置とする。
【0090】
また、対物レンズ10は、観察位置Kにおいて、倒立顕微鏡8に設けられたフォーカシングダイヤル8aを操作することによりZ方向に上下動することができるようになっている。
【0091】
複数の対物レンズをレボルバの回転により交換する際に、対物レンズの軌道と走査型プローブ顕微鏡ユニット4、走査型プローブ顕微鏡ユニットベース部3が干渉しないように、サンプル微動機構27とベースプレート13には逃げが設けられている。
【0092】
ここで、対物レンズ10はサンプルSに焦点を合わせた状態で交換をする場合が多い。このときベースプレート13との干渉をなくすためにはベースプレートの厚さを薄くする必要がある。本発明では、光学顕微鏡部8と走査型プローブ顕微鏡ユニットベース部3を独立して構成しているため、ベースプレート13の面積を大きくすることができ、ベースプレート13中央部以外の部分の肉厚を厚くすることができ、さらに、厚くすることで質量が重くなっても、光学顕微鏡部8とは独立した支柱12によりベースプレートを支えることができるため、走査型プローブ顕微鏡ユニットベース部3に高い剛性を確保させることが可能となった。
【0093】
以上のように構成された走査型プローブ顕微鏡では、走査型プローブ顕微鏡ユニット4とZ軸粗動機構110を薄く構成でき、さらにベースプレート13の下側に対物レンズ10を交換可能に配置できるスペースを有しているため、走査型プローブ顕微鏡ユニット4をコンデンサレンズ41と対物レンズ間の狭い空間に入れることができ、光学顕微鏡の性能を十分に活用でき位置合わせ精度を向上させることができる。
【0094】
また、プローブ21はサンプル面に対して垂直に直進するため、Z軸に沿ってプローブ21とサンプルを近接させる際に光軸に沿って移動するため位置ずれが発生せず、光学顕微鏡で観察した場所への位置合わせ精度も向上する。
【0095】
また、プローブ微動機構26とサンプル微動機構27サンプル微動機構に取り付けられたサンプルホルダ16を含む走査型プローブ顕微鏡ユニット4とZ軸粗動機構110、XYステージ140、走査型プローブ顕微鏡ユニットベース部3のベースプレート13の材料を実質的に同一とし、温度によるひずみの少ない低膨張金属であるインバー材(熱膨張係数0.5〜2×10-6/K)により構成し、温度によるひずみ自体を抑えるとともに、ひずみが生じた場合でもお互いにひずみ量を補償しあえるように構成した。
【0096】
ここで、実質的に同一とは、ユニットの構成上100%同じ材料で構成することは不可能であるため、本実施例においては走査型プローブ顕微鏡ユニット4とZ軸粗動機構110、XYステージ140、走査型プローブ顕微鏡ユニットベース部3のベースプレート13の合計質量のうち80%をインバー材で構成した。
【0097】
例えば、プローブ微動機構26に取り付けられるカンチレバーホルダー22のフレームは軽さを重視してチタンで構成し、ガラスホルダ23を保持している。また、Z軸粗動機構部110のガイド部やモータ駆動部112、サンプル機構部27やプローブ微動機構部26の圧電素子、各ユニットに使用されているネジ、プローブ変位検出手段44、45などはコストや機能上の問題によりインバー材以外の材料を用いた。
【0098】
また、走査型プローブ顕微鏡ユニットベース部3の支柱12は温度により膨張収縮しても走査型プローブ顕微鏡像自体には影響を与えないため、ステンレスにより構成しコストを削減したが、テーブル13と同じインバー材で構成してもよい。
【0099】
なお、低膨張金属としては、Fe−32Ni−5Coを成分とするスーパーインバー材(熱膨張係数0〜1.5×10-6/K)を用いてもよい。また、低膨張材料以外でも、実質的に同一材料であれば、温度によるひずみ量をお互いに補償しあえるため温度ドリフトを抑制することが可能である。
【0100】
次に、このように構成された本実施例における光学顕微鏡を備えた走査型プローブ顕微鏡1の作用について説明する。
【0101】
まず、走査型プローブ顕微鏡ユニット4をZ軸粗動機構110から外し、Z軸粗動機構の正面側からサンプルホルダ16にサンプルSに載置する。そして、走査型プローブ顕微鏡ユニット4をZ軸粗動機構110上のXYステージ140に固定する。そして光源40からサンプルSに向けて照明光を照射する。その照明光は、プローブ側貫通孔70を通り、サンプルSを透過して、さらにサンプルホルダ側開口部17を通ることにより、観察位置Kに配された対物レンズ10に到達する。これによって、対物レンズ10を介して、サンプルSの状態が観察が可能となり、XYステージ31により光学顕微鏡8全体を動かして、サンプルS上の被測定箇所を特定させる。
【0102】
このとき、レボルバ9を回すと、当初の対物レンズ10がスペースJを通って観察位置Kから外れ、他の対物レンズ10が観察位置Kに配置される。これにより、適切な倍率の対物レンズ10が選択される。
【0103】
また、フォーカシングダイヤル8aを操作すると、対物レンズ10が上方に移動し、対物レンズ10がサンプルSに近接し、フォーカシングすることができる。
【0104】
これによってサンプルSの光学的観察が行われ、この結果に応じて、プローブ顕微鏡による測定が行われる。
【0105】
プローブ顕微鏡による測定を行うには、サンプルSの表面とプローブ21の位置を、倒立顕微鏡8の光学像を見ながら、プローブ位置調整機構140で位置合わせをする。
【0106】
次に、レーザ光源44およびフォトディテクタ45の位置を調整する。すなわち、レーザ光源44から照射したレーザ光Lが、カンチレバー20の上面で反射し、フォトディテクタ45に確実に入射するよう位置調整を行う。
【0107】
尚、このプローブ変位検出手段であるレーザ光源とフォトディテクタの調整は、初めに行っておいてもよい。
【0108】
その後、側面からサンプルSとプローブ21を目視観察しながら、モーター123を駆動して、Z軸粗動機構部110により、カンチレバー20を粗動移動させて、カンチレバー20をサンプルに接近させる。そして、カンチレバー20先端部のプローブ21をサンプルSの表面近傍に位置させる。
【0109】
この状態から、不図示の加振手段により、カンチレバー20を介してプローブ21を、Z方向に沿って所定の周波数および振幅で振動させる。
【0110】
そして、図3に示すX側圧電素子61およびY側圧電素子54に電圧を印加する。すると、X側圧電素子61およびY側圧電素子54が伸縮し、X側変位拡大機構部62およびY側変位拡大機構部55を介して、内フレーム49がXY方向に微動する。これにより、プローブ21がサンプルS上を所定の走査速度でラスタースキャンする。
【0111】
このとき、内フレーム49がXY方向に微動すると、X方向ターゲット81およびY方向ターゲット78がそれぞれX方向、Y方向に微動し、そのX、Y方向の微動量がX方向センサ81およびY方向センサ78によって検出される。これら検出結果は演算部83に入力されて、カンチレバー20のXY方向の微動量の誤差が算出され、この算出結果が制御部84に入力される。このように、XY方向の微動量を補正することによって、X側圧電素子61やY側圧電素子54のヒステリシスやクリープに影響されず、XY方向に線形に動作する。
【0112】
走査の際、サンプルSの凹凸に応じて、プローブ21とサンプルSの表面との距離が変化すると、原子間力や間欠的な接触力によりプローブ21が斥力または引力を受けるので、カンチレバー20の振動状態が変化し、振巾や位相が変化する。この振巾や位相の変化は、フォトディテクタ45の異なる2対の分割面の出力差(DIF信号と呼ぶ)として検出される。このDIF信号は、不図示のZ電圧フィードバック回路に入力される。そして、Z電圧フィードバック回路は、DIF信号により振巾や位相が同じになるように、図4に示すZ側圧電素子90に電圧を印加する。
【0113】
Z側圧電素子90は、電圧が印加されることにより高速で伸縮を繰り返す。Z側圧電素子90が伸縮すると、延出部87を介してサンプルホルダ16が非常に高い周波数でZ方向に移動し、サンプルホルダ16上のサンプルSがZ方向に移動する。これにより、上記走査の際、プローブ21とサンプルSの表面との間の距離が常に一定に保たれる。
【0114】
また、サンプルホルダ16がZ方向に移動すると、Z方向微動量検出部108により、機構本体部86の微動量が検出され、この検出結果に応じて、サンプルホルダ16のZ方向の微動量の誤差が算出される。そして、その算出結果が制御部84に入力され、Z方向に線形に動作させることができる。
【0115】
なお、Z方向移動量検出部108により微動量を検出し、それをSPM像の高さ情報として表示させてもよい。この場合、より高速走査が可能となる。
【0116】
このようにして、X側、Y側、Z側圧電素子61、54、90に印加した電圧、またはX方向、Y方向、Z方向センサ81、78、108の信号を制御部84に入力し、画像化することでサンプルSの表面の形状像を測定することができる。また、プローブ21とサンプルSとの間に働くいろいろな力や物理作用を測定することで、粘弾性、サンプルSの表面電位分布、サンプルSの表面の漏れ磁界分布、近接場光学像等の各種の物性情報の測定を行うことができる。
【0117】
以上のように走査型プローブ顕微鏡を構成することで、装置剛性を確保でき、その結果、音や床振動の影響が抑制されて走査型プローブ顕微鏡の測定精度が向上する。
【0118】
また、対物レンズや対物レンズ交換機能、高効率の照明装置など市販の顕微鏡が有する機能をそのまま用いることができるため、システムの取扱も容易となる。
【実施例2】
【0119】
次に、本発明の第2の実施例について説明する。
【0120】
図6は、本発明の第2の実施例を示したものである。
【0121】
図6において、図1から図5に記載の構成要素と同一部分については同一符号を付し、その説明を省略する。
【0122】
この実施例と上記第1の実施例とは基本的構成は同一であり、以下の点において異なるものとなっている。
【0123】
すなわち、本実施例における走査型プローブ顕微鏡1は、正立顕微鏡と組み合わせたものである。すなわち、正立顕微鏡8には光源40が設けられ、光源40の上端にはコンデンサレンズ41が設けられている。また、コンデンサレンズ41の上方にはステージ微動機構部27が設けられている。ステージ微動機構部27は円筒状のZ側圧電素子34からなり、Z側圧電素子34はZ方向に向けて設置されている。Z側圧電素子34には、Z方向に向けられた筒孔(ステージ側貫通孔)33が形成されており、この筒孔33に光源40からの照明光が通されるようになっている。
【0124】
また、プローブ微動機構部26の上方には、観察位置Kに対物レンズ10が設けられている。ここでの観察位置Kとは、プローブ微動機構部26の上方から、カンチレバー20または試料Sを観察する位置をいう。対物レンズ10は、観察位置Kにおいて上下動するようになっており、下方に移動させると、プローブ微動機構26の内部空間に挿入されるようになっている。
【0125】
このような構成のもと、光源40からの照明光は、筒孔33を通って試料Sを透過する。また、対物レンズ10を下方に移動させて、プローブ側貫通孔70の方向に挿入すると、対物レンズ10はカンチレバー20または試料Sに近接する。
【0126】
以上より、ステージ微動機構部27には筒孔33が設けられ、この筒孔110に照明光を通していることから、照明光の進行を邪魔することなく、高精度に測定することができる。
【0127】
ここで、Z軸粗動機構110とXYステージ140は第一の実施例と同じものを用いており、Z軸粗動機構110の中空開口部113内に走査型プローブ顕微鏡ユニット4が配置されているため、光軸方向の高さを薄く構成でき、対物レンズ10を、中空開口部113内のプローブ側微動機構26内部に挿入することができることから、カンチレバー20や試料Sに対物レンズ10を一層近接させることができ、高NAの対物レンズを設けて高精度な測定を行うことができる。
【0128】
本発明の走査型プローブ顕微鏡のZ軸粗動機構の構造は第一の実施例、第二の実施例の形状に限定されず例えば図7に示すように平面視「U」字形状のものなども考えられる。また、外周部から内周部への切欠は必ずしも上面から底面にかけて貫通する必要はない。図8はこの場合の一実施例で、図8(a)はZ軸粗動機構形状を表す平面図、図8(b)は正面図である。この図のように正面視して底面から高さ方向の中間部分までのみが外周から内周にかけて切欠160を持っているような構造でもよい。また、Z軸粗動機構とXYステージの機構は上記実施例に限定されるものではない。
【0129】
また、プローブをZ軸粗動機構により動作させるようにしたが、サンプル側をZ軸微動機構により動作させて、プローブに近づける構成でもよい。
【0130】
また、光学顕微鏡は必須の要素ではなく、走査型プローブ顕微鏡のみでもよい。また、光学顕微鏡と組み合わせ場合には、光学顕微鏡のフレームに走査型プローブ顕微鏡ユニットを載せてもよい。
【0131】
また、上記第1および第2の実施例では、X側圧電素子61、Y側圧電素子54およびZ側圧電素子90を積層型の圧電素子としたが、これに限ることはなく、適宜変更可能である。例えば、スタック型の圧電素子としたり、またはボイスコイルなどを用いたりすることも可能である。
【0132】
また、プローブ微動機構部26とステージ微動機構部27を一体構造としてもよい。
【0133】
また、DFMモードによる観察としたが、これに限ることはなく、コンタクトAFMなどの種々のモードに適用可能である。さらに、近接場顕微鏡にも適用することができる。近接場顕微鏡に適用すると、高NAの対物レンズを使用することができるため、近接場信号の集光効率を向上させることができる。
【図面の簡単な説明】
【0134】
【図1】本発明に係る走査型プローブ顕微鏡の第1実施例を示す構成図であり、(a)は正面図、(b)は(a)において符号Aによって示す領域の拡大図である。
【図2−1】図1に示す走査型プローブ顕微鏡のZ軸粗動機構とXYステージの構成図であり、(a)は平面図。
【図2−2】(b)は正面図、(c)は(a)のB−B線断面図である。
【図3】図1に示す走査型プローブ顕微鏡のプローブ微動機構部を示す平面図である。
【図4】図1に示す走査型プローブ顕微鏡のサンプル微動機構部を示す平面図である。
【図5】図3に示す走査型プローブ顕微鏡のサンプル微動機構部を示す底面図である。
【図6】本発明に係る走査型プローブ顕微鏡の第2実施例を示す正面図である。
【図7】本発明に係る走査型プローブ顕微鏡の第3実施例のZ軸粗動機構の形状を示す平面図である。
【図8】本発明に係る走査型プローブ顕微鏡の第4実施例のZ軸粗動機構を示す構成図であり、(a)は平面図、(b)は正面図である。
【図9】従来の走査型プローブ顕微鏡の第一の概観図である。
【図10】従来の走査型プローブ顕微鏡の第二の概観図であって、(a)は概観図、(b)は(a)の走査型プローブ顕微鏡部の詳細図である。
【符号の説明】
【0135】
1 走査型プローブ顕微鏡
2 除振台
3 走査型プローブ顕微鏡ユニットベース部
4 走査型プローブ顕微鏡ユニット
5 照明装置
8 光学顕微鏡部(倒立顕微鏡)
9 レボルバ
10 対物レンズ
12 支柱
13 ベースプレート
16 サンプルホルダ
20 カンチレバー
21 プローブ
22 カンチレバーホルダー
26 プローブ微動機構
27 サンプル微動機構
30 クランク固定部
31 XYステージ
40 光源
41 コンデンサレンズ
42 照明用支柱
44 レーザ光源(プローブ変位検出手段)
45 フォトダイオード(プローブ変位検出手段)
50 光学顕微鏡フレーム部
110 Z軸粗動機構部
111 ベース
112 モーター駆動部
113 中空開口部
117 水平移動部
119 垂直移動部
121 上面移動テーブル
123 ステッピングモータ
125 ボールネジ
140 XYステージ(プローブ位置調整機構)
141 X移動テーブル
142 Y移動テーブル
S サンプル
【特許請求の範囲】
【請求項1】
プローブとサンプルホルダ上に載置されたサンプル間の高さ方向の距離を制御しながら、該サンプル面内で前記プローブと前記サンプルを相対的に移動させる走査型プローブ顕微鏡において、
前記プローブと前記サンプル表面とを近接させるZ軸粗動機構と、
該Z軸粗動機構に前記サンプル面内と垂直な方向に移動する上面移動テーブルを有し、
前記Z軸粗動機構が上面から低面にかけて中空の開口部を有し、
該中空開口部の周囲を取り囲む前記Z軸粗動機構側面の外周部から内周部にかけて切欠を有し、
前記中空開口部に前記プローブまたは前記サンプルホルダのいずれかを含む走査型プローブ顕微鏡ユニットの一部または全部が配置され、
前記走査型プローブ顕微鏡ユニットが前記上面移動テーブルに固定されることを特徴とする走査型プローブ顕微鏡。
【請求項2】
前記中空開口部に照明装置の一部または全部が配置されることを特徴とする請求項1に記載の走査型プローブ顕微鏡。
【請求項3】
前記照明装置に、開口数0.5以上のコンデンサレンズが含まれることを特徴とする請求項2に記載の走査型プローブ顕微鏡。
【請求項4】
前記走査型プローブ顕微鏡ユニットに取り付けられたプローブに対向する位置に透過孔を有するサンプルホルダが配置され、該サンプルホルダに対して前記プローブと対向する側に対物レンズが配置された請求項1乃至請求項3に記載の走査型プローブ顕微鏡。
【請求項5】
前記走査型プローブ顕微鏡ユニットに取り付けられたサンプルホルダに対向する位置にプローブが配置され、該プローブに対して前記サンプルホルダと対向する位置に対物レンズが配置された請求項1乃至請求項3に記載の走査型プローブ顕微鏡。
【請求項6】
前記中空開口部に対物レンズまたは集光レンズが配置されることを特徴とする請求項1乃至請求項5に記載の走査型プローブ顕微鏡。
【請求項7】
前記Z軸粗動機構が設置されるベースプレートにサンプルホルダまたはプローブが固定され、前記サンプルホルダおよび前記ベースプレートおよび前記Z軸粗動機構および前記走査型プローブ顕微鏡ユニットが実質的に同一の材質で構成される請求項1乃至請求項6に記載の走査型プローブ顕微鏡。
【請求項8】
前記走査型プローブ顕微鏡ユニットの材質が、低膨張材料である請求項7に記載の走査型プローブ顕微鏡。
【請求項9】
前記Z軸粗動機構および前記ベースプレートおよび前記サンプルホルダおよび前記走査型プローブ顕微鏡ユニットの全質量のうち、80%以上が同一の材質で構成される請求項7又は8に記載の走査型プローブ顕微鏡。
【請求項10】
前記材質の熱膨張係数が4×10-6/K以下である請求項8乃至9に記載の走査型プローブ顕微鏡。
【請求項11】
前記Z軸粗動機構が、上面移動テーブル面内と平行な方向に摺動可能で第一の傾斜部を有する水平移動部と、概第一の傾斜部と摺動可能に連結される第二の傾斜部を有し前記上面移動テーブルが固定され前記上面移動テーブル面内での動きが拘束され前記上面移動テーブル面内と直交する方向に移動可能に配置された垂直移動部から構成され、前記水平移動部を上面移動テーブル面と平行な方向に移動させ、前記第一の傾斜部により前記第二の傾斜部を押すことにより前記上面移動テーブルをテーブル面に垂直方向に移動させるように構成された請求項1乃至請求項10に記載の走査型プローブ顕微鏡。
【請求項12】
前記Z軸粗動機構の上面移動テーブル上に、上面移動テーブル面内で移動可能な第二のステージを固定し、該第二のステージを介して、前記走査型プローブ顕微鏡ユニットが前記上面移動テーブルに固定された請求項1乃至請求項11に記載の走査型プローブ顕微鏡。
【請求項1】
プローブとサンプルホルダ上に載置されたサンプル間の高さ方向の距離を制御しながら、該サンプル面内で前記プローブと前記サンプルを相対的に移動させる走査型プローブ顕微鏡において、
前記プローブと前記サンプル表面とを近接させるZ軸粗動機構と、
該Z軸粗動機構に前記サンプル面内と垂直な方向に移動する上面移動テーブルを有し、
前記Z軸粗動機構が上面から低面にかけて中空の開口部を有し、
該中空開口部の周囲を取り囲む前記Z軸粗動機構側面の外周部から内周部にかけて切欠を有し、
前記中空開口部に前記プローブまたは前記サンプルホルダのいずれかを含む走査型プローブ顕微鏡ユニットの一部または全部が配置され、
前記走査型プローブ顕微鏡ユニットが前記上面移動テーブルに固定されることを特徴とする走査型プローブ顕微鏡。
【請求項2】
前記中空開口部に照明装置の一部または全部が配置されることを特徴とする請求項1に記載の走査型プローブ顕微鏡。
【請求項3】
前記照明装置に、開口数0.5以上のコンデンサレンズが含まれることを特徴とする請求項2に記載の走査型プローブ顕微鏡。
【請求項4】
前記走査型プローブ顕微鏡ユニットに取り付けられたプローブに対向する位置に透過孔を有するサンプルホルダが配置され、該サンプルホルダに対して前記プローブと対向する側に対物レンズが配置された請求項1乃至請求項3に記載の走査型プローブ顕微鏡。
【請求項5】
前記走査型プローブ顕微鏡ユニットに取り付けられたサンプルホルダに対向する位置にプローブが配置され、該プローブに対して前記サンプルホルダと対向する位置に対物レンズが配置された請求項1乃至請求項3に記載の走査型プローブ顕微鏡。
【請求項6】
前記中空開口部に対物レンズまたは集光レンズが配置されることを特徴とする請求項1乃至請求項5に記載の走査型プローブ顕微鏡。
【請求項7】
前記Z軸粗動機構が設置されるベースプレートにサンプルホルダまたはプローブが固定され、前記サンプルホルダおよび前記ベースプレートおよび前記Z軸粗動機構および前記走査型プローブ顕微鏡ユニットが実質的に同一の材質で構成される請求項1乃至請求項6に記載の走査型プローブ顕微鏡。
【請求項8】
前記走査型プローブ顕微鏡ユニットの材質が、低膨張材料である請求項7に記載の走査型プローブ顕微鏡。
【請求項9】
前記Z軸粗動機構および前記ベースプレートおよび前記サンプルホルダおよび前記走査型プローブ顕微鏡ユニットの全質量のうち、80%以上が同一の材質で構成される請求項7又は8に記載の走査型プローブ顕微鏡。
【請求項10】
前記材質の熱膨張係数が4×10-6/K以下である請求項8乃至9に記載の走査型プローブ顕微鏡。
【請求項11】
前記Z軸粗動機構が、上面移動テーブル面内と平行な方向に摺動可能で第一の傾斜部を有する水平移動部と、概第一の傾斜部と摺動可能に連結される第二の傾斜部を有し前記上面移動テーブルが固定され前記上面移動テーブル面内での動きが拘束され前記上面移動テーブル面内と直交する方向に移動可能に配置された垂直移動部から構成され、前記水平移動部を上面移動テーブル面と平行な方向に移動させ、前記第一の傾斜部により前記第二の傾斜部を押すことにより前記上面移動テーブルをテーブル面に垂直方向に移動させるように構成された請求項1乃至請求項10に記載の走査型プローブ顕微鏡。
【請求項12】
前記Z軸粗動機構の上面移動テーブル上に、上面移動テーブル面内で移動可能な第二のステージを固定し、該第二のステージを介して、前記走査型プローブ顕微鏡ユニットが前記上面移動テーブルに固定された請求項1乃至請求項11に記載の走査型プローブ顕微鏡。
【図1】


【図2−1】
【図2−2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2−1】
【図2−2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−33117(P2007−33117A)
【公開日】平成19年2月8日(2007.2.8)
【国際特許分類】
【出願番号】特願2005−214003(P2005−214003)
【出願日】平成17年7月25日(2005.7.25)
【出願人】(503460323)エスアイアイ・ナノテクノロジー株式会社 (330)
【Fターム(参考)】
【公開日】平成19年2月8日(2007.2.8)
【国際特許分類】
【出願日】平成17年7月25日(2005.7.25)
【出願人】(503460323)エスアイアイ・ナノテクノロジー株式会社 (330)
【Fターム(参考)】
[ Back to top ]