
走査型プローブ顕微鏡
【課題】走査型プローブ顕微鏡におけるカンチレバーの初期取り付け時およびカンチレバーの交換時の光軸調整作業を容易にする。
【解決手段】光軸調整作業時、ビデオカメラ画像上でカンチレバーおよびレーザ光輝度重心位置にマーカを表示し、レーザ光位置の移動に追随するマーカを目視しながら重ね合わせる。また、初期光軸調整後に記憶したマーカ位置座標データを用いて、新規カンチレバーの光軸調整を行う。さらに目標位置座標を設定することにより、レーザ光の移動方向と目標位置までの距離を数値で認識する。
【解決手段】光軸調整作業時、ビデオカメラ画像上でカンチレバーおよびレーザ光輝度重心位置にマーカを表示し、レーザ光位置の移動に追随するマーカを目視しながら重ね合わせる。また、初期光軸調整後に記憶したマーカ位置座標データを用いて、新規カンチレバーの光軸調整を行う。さらに目標位置座標を設定することにより、レーザ光の移動方向と目標位置までの距離を数値で認識する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走査型プローブ顕微鏡に係るもので、特に顕微鏡の光軸調整に関するものである。
【背景技術】
【0002】
走査型プローブ顕微鏡(SPM)の代表的な例として原子間力顕微鏡がある。前記原子間力顕微鏡は、カンチレバーの探針と試料との間に生じる物理的な力を計測して試料表面の形状を測定するもので、その概略的な構成は図5に示すとおりである。
【0003】
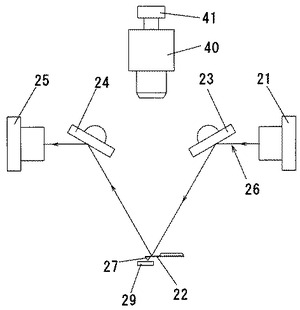
図5は顕微鏡の要部の構成を概略的に示すものであり、先端に探針27を有するカンチレバー22と、レーザ光源21と、反射鏡23および24と、4分割光検出器25から構成される。なお図5では、探針27やカンチレバー22の大きさは、他の構成要素との関係で誇張して示されている。
【0004】
通常、レーザ光源21からレーザ光26を、反射鏡23を介してカンチレバー22の上面に照射し、その反射光を4分割光検出器25に反射鏡24を介して入射させる。この状態において、探針27と試料29とを1nm以下の距離まで互いに近づけると、探針27の先端原子と試料29の表面原子との間に原子間力(引力・斥力)が作用して探針27が上方または下方に変動し、その結果カンチレバー22が上または下方向に撓むことになる。前記カンチレバー22の撓みにより、レーザ光の反射光が4分割光検出器25に入射する位置が変化する。前記の変化により、4分割光検出器25の出力が変化し、この出力の変化に基づいてスキャナ(図示せず)によって、探針27と試料29との間の距離を一定に保つ(すなわち原子間力を一定に保つ)べくフィードバック制御を行う。したがって、前記探針27と試料29との間の距離制御を行いながら探針27または試料29を2次元走査することにより、試料29の表面の凹凸画像(定力像)が、画像表示装置(図示せず)に表示される。
【0005】
原子間力顕微鏡においては、レーザ光源からのレーザ光が、4分割光検出器の中央に最も強度の強い反射光を入射すべくレーザ光及び4分割光検出器の位置を調整することを「光軸調整」という。従来の光軸調整は、操作者の手動操作によって行われていた。
【0006】
以下に、従来の光軸調整の手順を示す。
(第1操作)
カンチレバー22およびレーザ光26を光学顕微鏡40によって捉え、ビデオカメラ41によって撮影した画像を確認しながら、原子間力顕微鏡ヘッド(図示せず)部分にあるレーザ光調整つまみ(図示せず)を回して、レーザ光26がカンチレバー22と重なるようにレーザ光の照射位置を調整する。(粗調整という)
(第2操作)
カンチレバー22から反射したレーザ光26を4分割光検出器25の直前で紙片に映し、レーザ光が最も明るく、丸く、映るようにレーザ光調整つまみ(図示せず)でレーザ光26の照射位置を調整する。(微調整という)
(第3操作)
カンチレバー22から反射したレーザ光26が4分割光検出器25の中央に照射すべく4分割光検出器25の位置を調整する。
【0007】
なお、特許文献1には、走査型プローブ顕微鏡において、カンチレバーに光軸調整用の振動を与えて光軸調整を行うという方法が開示されている。また、特許文献2には、走査型プローブ顕微鏡において、カンチレバーの代わりにカンチレバーの背面の面積よりも広い照射面を有するレーザ光観察部材を使用する光軸調整方法とその光軸調整用補助具が開示されている。さらに、特許文献3には、真空容器内に設置された走査型プローブ顕微鏡において、4分割光検出器の容器外部からの調整方法が開示されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2000−19093号公報
【特許文献2】特開2000−329772号公報
【特許文献3】特開平10−96737号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、ビデオカメラによって撮影された画像ではレーザ光の輝度が強いため、レーザ光以外の画像部分が暗く表示され、ビデオカメラ画像上でカンチレバーの位置を目視によって認識することが困難である。そのため、レーザ光をカンチレバーの位置に重ねることが困難である。
【0010】
また、ビデオカメラ画像を用いて、レーザ光をカンチレバーに重ねるべく調整した後、4分割光検出器の直前で紙片に写してレーザ光の照射位置の調整を行うという煩雑な手順を必要とする。
【0011】
さらに、レーザ光の照射位置を調整するとき、原子間力顕微鏡ヘッド部分にあるレーザ光調節つまみを手動操作するため、原子間力顕微鏡ヘッドが揺れ、同時にビデオカメラ画像も揺れるので、レーザ光の調整による動きと原子間力顕微鏡ヘッドの揺れによる動きを判別するのが困難である。
【0012】
原子間力顕微鏡では、近接する試料表面を走査する際、カンチレバーが直接試料に接することにより探針の消耗が発生する。そのためカンチレバーを頻繁に交換することが行われ、その交換のたびに光軸調整が必要となる。したがって、カンチレバーの交換時の光軸調整の容易化が求められている。
【課題を解決するための手段】
【0013】
本発明は、上記課題を解決するために、試料に対向すべく配置された探針を備えたカンチレバーと、レーザ光を出力するレーザ光源と、前記レーザ光源から照射されるレーザ光を前記カンチレバーへ導く第1反射器と、前記カンチレバーで反射されたレーザ光を光検出器へ導く第2反射器と、前記レーザ光を検出する光検出器と、前記レーザ光の光軸調整のためにカンチレバー近接位置を観察するビデオカメラと、を備えた走査型プローブ顕微鏡において、前記カンチレバーの位置を示すカンチレバー位置マーカと、前記レーザ光の輝度重心位置を示すレーザ光輝度重心位置マーカと、をビデオカメラの画像上に表示する表示手段を備えるとともに、前記レーザ光の移動に追随してレーザ光輝度重心位置マーカもビデオカメラの画像上で移動することを特徴とする。
【0014】
さらに本発明は、初期カンチレバーに対する初期光軸調整完了後の、初期カンチレバー位置マーカと初期レーザ光輝度重心位置マーカの位置関係を示す初期マーカ相対位置関係を、記憶および表示する記憶・表示手段を備えたものである。
【0015】
さらに本発明は、前記初期カンチレバーを新規カンチレバーに取り替えたとき、前記初期マーカ相対位置関係を基に、新規カンチレバー位置に対する新規レーザ光の相対的な位置を算出して目標位置マーカとして設定するとともに、前記目標位置マーカを原点とする座標系を設けたことを特徴とする。
【0016】
さらに本発明は、前記初期レーザ光輝度重心位置マーカを前記目標位置マーカに重ね合わせるための制御手段を備えたものである。
【0017】
カンチレバーの位置およびレーザ光の輝度重心位置を、前記ビデオカメラの画像上で、カンチレバー位置マーカおよびレーザ光輝度重心位置マーカとして表示し、そのマーカを用いて光軸調整を行う。
【発明の効果】
【0018】
光軸調整時に、観察者がビデオカメラ画像上で、カンチレバーの位置とレーザ光束の輝度重心位置を目視で明確に認識できるので、カンチレバーの位置とレーザ光輝度重心位置を一致させるのが容易になる。また、光軸調整完了後のカンチレバーの位置とレーザ光輝度重心位置のビデオカメラ画像上での位置関係を記憶することにより、そのデータに基づいて光軸調整を行うことができるので、カンチレバーを交換した際の粗調整が不要になる。さらに、座標が表示されることにより、レーザの移動方向と目標位置までの距離を認識することができるので調整がやり易くなる。
【図面の簡単な説明】
【0019】
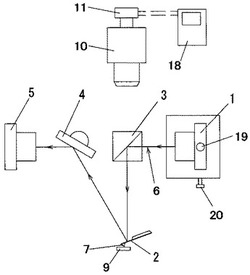
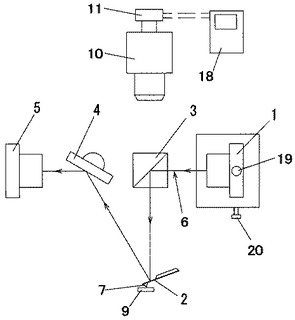
【図1】本発明の実施例である原子間力顕微鏡の要部の構成を概略的に示す図である。また、光軸調整に使用する光学顕微鏡およびビデオカメラも同時に図示されている。
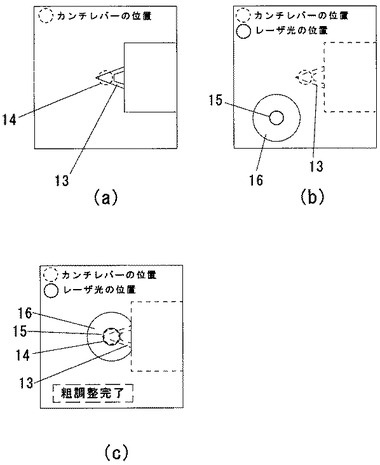
【図2】本発明の実施例における光軸調整手順中の粗調整の手順を示す。図2(a)はカンチレバー位置にマーカを表示した状態を示す図である。図2(b)はレーザ光およびカンチレバー位置にマーカを表示した状態を示す図である。図2(c)はレーザ光のマーカをカンチレバーのマーカに重ねた状態を示す図である。
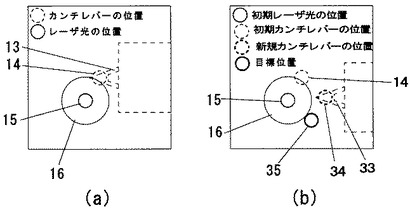
【図3】本発明の実施例における新規のカンチレバーの光軸調整の手順を示す。図3(a)は、微調整完了時に記憶されたカンチレバーとレーザ光の初期マーカ相対位置関係を示す図である。図3(b)は、新規のカンチレバー位置を示すマーカを表示し、そのマーカを基準に、記憶した初期マーカ相対位置関係からレーザ光の相対的な位置を算出し、その算出したマーカ位置を目標位置とする目標位置マーカを表示した状態を示す図である。
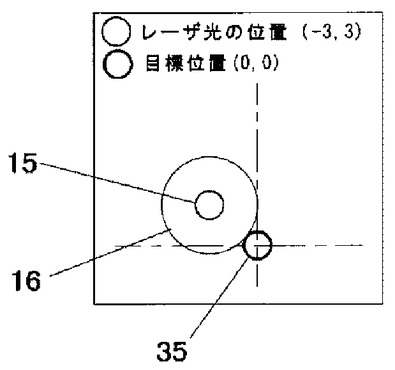
【図4】本発明の実施例において、新規のカンチレバーに対するレーザ光調整の目標位置を基準(座標0,0)としたレーザ光の位置座標を表示した状態を示す図である。
【図5】従来の原子間力顕微鏡の要部の構成を概略的に示す図である。また、光軸調整に使用する光学顕微鏡およびビデオカメラも同時に図示されている。
【発明を実施するための形態】
【0020】
図1に本発明の実施例である原子間力顕微鏡の要部の構成が概略的に示されている。また、光軸調整に使用される光学顕微鏡10とビデオカメラ11(例えばCCDカメラなど)も同時に図示されている。原子間力顕微鏡の主要部は、レーザ光源1と、ビームスプリッタ3と、カンチレバー2と、反射鏡4と、4分割光検出器5より構成される。レーザ光源1から出射されたレーザ光6はビームスプリッタ3を経てカンチレバー2に入射される。そのレーザ光6はカンチレバー2で反射されて、さらに反射鏡4を介して4分割光検出器5に導かれて検出される。なお、試料9は、カンチレバー2に備えられた探針7に対向して配置されている。
【0021】
次に、図1〜図4にしたがって、光軸調整の手順をステップごとに説明する。光軸調整作業には、観察用の光学顕微鏡10と倍率の高いビデオカメラ11が組み合わせて使用される。
【0022】
(第1ステップ)
光学顕微鏡10の観察視野にカンチレバー2とカンチレバー2や試料9で反射されたレーザ光6を捉え、次にビデオカメラ11にカンチレバー画像13とレーザ光束画像16を表示する。ビデオカメラ11の画像上では、レーザ光6の輝度が強いため、レーザ光6以外のカンチレバー画像部分が暗く表示されるので、輝度の高いレーザ光6をオフにして、光軸調整装置18により、カンチレバー画像13上にカンチレバー位置マーカ14が表示される。なお、カンチレバー位置マーカ14の表示は、ユーザーが手動により指定する手法や、パターンマッチング手法を用いた画像処理により行われる。また、本実施例では、カンチレバー位置マーカ14として丸印破線を使用している。その状態が図2(a)に示されている。
【0023】
(第2ステップ)
次に、レーザ光6をオンにして、ビデオカメラ11の画像上において、光軸調整装置18により、レーザ光束の輝度重心位置を画像処理により検出し、レーザ光束画像16上にレーザ光輝度重心位置マーカ15が表示される。本実施例では、レーザ光輝度重心位置マーカ15として丸印実線を使用している。さらに、輝度の高いレーザ光6のため暗く表示されるカンチレバー等を破線で表示している。その状態が図2(b)に示されている。
【0024】
(第3ステップ)
次に、レーザ光調整つまみ19、20によりレーザ光源1を水平および垂直方向に動かしながら、ビデオカメラ11の画像上で、レーザ光輝度重心位置マーカ15をカンチレバー位置マーカ14まで移動させる。レーザ光6の照射位置の移動に追随してビデオカメラ11の画像上のレーザ光輝度重心位置マーカ15も移動し、レーザ光輝度重心位置マーカ15とカンチレバー位置マーカ14が重なると、光軸調整装置18により粗調整完了の合図がビデオカメラ11の画像上に表示される。その状態が図2(c)に示されている。
【0025】
(第4ステップ)
従来と同様に、カンチレバー2で反射されたレーザ光6を4分割光検出器5の直前で紙片に映し、レーザ光6が最も明るく、丸く、映るようにレーザ光調整つまみ19、20によってレーザ光6の照射位置を調整する。このステップを微調整という。
【0026】
この微調整完了時に、ビデオカメラ11の画像上でのレーザ光輝度重心位置マーカ15とカンチレバー位置マーカ14の初期マーカ相対位置関係を、図3(a)に示す状態で光軸調整装置18に記憶させる。なお、光軸調整装置18はレーザ光輝度重心位置マーカ15およびカンチレバー位置マーカ14の位置座標の記憶および表示手段を備えている。次に、カンチレバー2で反射されたレーザ光6が4分割光検出器5の中央に当たるように4分割光検出器5の位置を調整して光軸調整は完了する。ここまでのステップは、1個目のカンチレバー、即ち初期カンチレバーに対する初期光軸調整である。
【0027】
原子間力顕微鏡では、近接する試料表面を走査する際、カンチレバーが直接試料に接することにより探針の消耗が発生する。そのためカンチレバーを頻繁に交換することが行われ、その交換のたびに光軸調整が必要となる。したがって、交換された新規のカンチレバーの光軸調整方法が、次の第5ステップに記述されている。
【0028】
(第5ステップ)
初期カンチレバーを新規のカンチレバーに取り替えた後、輝度の高いレーザ光6をオフにして、光軸調整装置18により、図3(b)に示すとおり新規のカンチレバー画像33上に新規のカンチレバー位置マーカ34が第1ステップと同様に表示される。次に、新規のカンチレバー位置マーカ34を基準に、図3(a)に示す微調整完了時に記憶された初期マーカ相対位置関係を基に、新規カンチレバー位置に対する新規レーザ光の相対的な位置を算出して目標位置マーカ35を設定する。その状態が図3(b)に示されている。次に、レーザ光調整つまみ19、20によって、ビデオカメラ11の画像上でレーザ光輝度重心位置マーカ15を目標位置マーカ35に重ねることにより光軸調整が完了する。したがって、カンチレバーを新規に取り替えるたびに第5ステップにしたがって光軸調整が行われる。
【0029】
第5ステップにおいて、図4に示すとおり、光軸調整装置18により、ビデオカメラ11の画像上で、目標位置マーカ35を基準(座標0,0)とした新しい座標系において、レーザ光束画像16上に表示されたレーザ光輝度重心位置マーカ15の位置座標が表示される。また、光軸調整装置18により、レーザ光輝度重心位置マーカ15の位置はレーザ光6の移動に伴ってその位置座標が刻々更新される。そのため、レーザ光輝度重心位置マーカ15の座標数値によって、レーザ光輝度重心位置マーカ15を目標位置マーカ35に重ねるために移動すべき距離と移動すべき方向を認識することができ、さらに、レーザ光調整つまみ19、20を動かすことによる位置座標の変化によって、移動した距離と移動方向を認識することができる。
【0030】
また、原子間力顕微鏡ヘッドの揺れによりビデオカメラ11の画像上の目標位置マーカ35とレーザ光輝度重心位置マーカ15は同時に揺れることにより、目標位置マーカ35を基準とするレーザ光輝度重心位置マーカ15の位置座標は揺れの影響を受けない。
【0031】
さらに、手動の光軸調整用のレーザ光調整つまみ19、20をモータ駆動(図示せず)に変更することにより光軸調整を自動化することができる。前記のとおり、図4に示すビデオカメラ11の画像上に、目標位置マーカ35を基準としたレーザ光輝度重心位置マーカ15の位置座標を表示し、その目標位置マーカ35にレーザ光輝度重心位置マーカ15の位置を一致させるための、すなわち両マーカ間の距離をゼロにするためのフィードバック制御を行うことにより光軸調整の自動化が可能となる。なお、光軸調整装置18は、前記フィードバック制御を行う制御手段を備えている。
【0032】
なお、図1〜図4において同符号は同一物または同一の事柄を表す。
【符号の説明】
【0033】
1、21 レーザ光源
2、22 カンチレバー
3 ビームスプリッタ
4、23、24 反射鏡
5、25 4分割光検出器
6、26 レーザ光
7、27 探針
9、29 試料
10、40 光学顕微鏡
11、41 ビデオカメラ
13、33 カンチレバー画像
14、34 カンチレバー位置マーカ
15 レーザ光輝度重心位置マーカ
16 レーザ光束画像
18 光軸調整装置
19、20 レーザ光調整つまみ
35 目標位置マーカ
【技術分野】
【0001】
本発明は、走査型プローブ顕微鏡に係るもので、特に顕微鏡の光軸調整に関するものである。
【背景技術】
【0002】
走査型プローブ顕微鏡(SPM)の代表的な例として原子間力顕微鏡がある。前記原子間力顕微鏡は、カンチレバーの探針と試料との間に生じる物理的な力を計測して試料表面の形状を測定するもので、その概略的な構成は図5に示すとおりである。
【0003】
図5は顕微鏡の要部の構成を概略的に示すものであり、先端に探針27を有するカンチレバー22と、レーザ光源21と、反射鏡23および24と、4分割光検出器25から構成される。なお図5では、探針27やカンチレバー22の大きさは、他の構成要素との関係で誇張して示されている。
【0004】
通常、レーザ光源21からレーザ光26を、反射鏡23を介してカンチレバー22の上面に照射し、その反射光を4分割光検出器25に反射鏡24を介して入射させる。この状態において、探針27と試料29とを1nm以下の距離まで互いに近づけると、探針27の先端原子と試料29の表面原子との間に原子間力(引力・斥力)が作用して探針27が上方または下方に変動し、その結果カンチレバー22が上または下方向に撓むことになる。前記カンチレバー22の撓みにより、レーザ光の反射光が4分割光検出器25に入射する位置が変化する。前記の変化により、4分割光検出器25の出力が変化し、この出力の変化に基づいてスキャナ(図示せず)によって、探針27と試料29との間の距離を一定に保つ(すなわち原子間力を一定に保つ)べくフィードバック制御を行う。したがって、前記探針27と試料29との間の距離制御を行いながら探針27または試料29を2次元走査することにより、試料29の表面の凹凸画像(定力像)が、画像表示装置(図示せず)に表示される。
【0005】
原子間力顕微鏡においては、レーザ光源からのレーザ光が、4分割光検出器の中央に最も強度の強い反射光を入射すべくレーザ光及び4分割光検出器の位置を調整することを「光軸調整」という。従来の光軸調整は、操作者の手動操作によって行われていた。
【0006】
以下に、従来の光軸調整の手順を示す。
(第1操作)
カンチレバー22およびレーザ光26を光学顕微鏡40によって捉え、ビデオカメラ41によって撮影した画像を確認しながら、原子間力顕微鏡ヘッド(図示せず)部分にあるレーザ光調整つまみ(図示せず)を回して、レーザ光26がカンチレバー22と重なるようにレーザ光の照射位置を調整する。(粗調整という)
(第2操作)
カンチレバー22から反射したレーザ光26を4分割光検出器25の直前で紙片に映し、レーザ光が最も明るく、丸く、映るようにレーザ光調整つまみ(図示せず)でレーザ光26の照射位置を調整する。(微調整という)
(第3操作)
カンチレバー22から反射したレーザ光26が4分割光検出器25の中央に照射すべく4分割光検出器25の位置を調整する。
【0007】
なお、特許文献1には、走査型プローブ顕微鏡において、カンチレバーに光軸調整用の振動を与えて光軸調整を行うという方法が開示されている。また、特許文献2には、走査型プローブ顕微鏡において、カンチレバーの代わりにカンチレバーの背面の面積よりも広い照射面を有するレーザ光観察部材を使用する光軸調整方法とその光軸調整用補助具が開示されている。さらに、特許文献3には、真空容器内に設置された走査型プローブ顕微鏡において、4分割光検出器の容器外部からの調整方法が開示されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2000−19093号公報
【特許文献2】特開2000−329772号公報
【特許文献3】特開平10−96737号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、ビデオカメラによって撮影された画像ではレーザ光の輝度が強いため、レーザ光以外の画像部分が暗く表示され、ビデオカメラ画像上でカンチレバーの位置を目視によって認識することが困難である。そのため、レーザ光をカンチレバーの位置に重ねることが困難である。
【0010】
また、ビデオカメラ画像を用いて、レーザ光をカンチレバーに重ねるべく調整した後、4分割光検出器の直前で紙片に写してレーザ光の照射位置の調整を行うという煩雑な手順を必要とする。
【0011】
さらに、レーザ光の照射位置を調整するとき、原子間力顕微鏡ヘッド部分にあるレーザ光調節つまみを手動操作するため、原子間力顕微鏡ヘッドが揺れ、同時にビデオカメラ画像も揺れるので、レーザ光の調整による動きと原子間力顕微鏡ヘッドの揺れによる動きを判別するのが困難である。
【0012】
原子間力顕微鏡では、近接する試料表面を走査する際、カンチレバーが直接試料に接することにより探針の消耗が発生する。そのためカンチレバーを頻繁に交換することが行われ、その交換のたびに光軸調整が必要となる。したがって、カンチレバーの交換時の光軸調整の容易化が求められている。
【課題を解決するための手段】
【0013】
本発明は、上記課題を解決するために、試料に対向すべく配置された探針を備えたカンチレバーと、レーザ光を出力するレーザ光源と、前記レーザ光源から照射されるレーザ光を前記カンチレバーへ導く第1反射器と、前記カンチレバーで反射されたレーザ光を光検出器へ導く第2反射器と、前記レーザ光を検出する光検出器と、前記レーザ光の光軸調整のためにカンチレバー近接位置を観察するビデオカメラと、を備えた走査型プローブ顕微鏡において、前記カンチレバーの位置を示すカンチレバー位置マーカと、前記レーザ光の輝度重心位置を示すレーザ光輝度重心位置マーカと、をビデオカメラの画像上に表示する表示手段を備えるとともに、前記レーザ光の移動に追随してレーザ光輝度重心位置マーカもビデオカメラの画像上で移動することを特徴とする。
【0014】
さらに本発明は、初期カンチレバーに対する初期光軸調整完了後の、初期カンチレバー位置マーカと初期レーザ光輝度重心位置マーカの位置関係を示す初期マーカ相対位置関係を、記憶および表示する記憶・表示手段を備えたものである。
【0015】
さらに本発明は、前記初期カンチレバーを新規カンチレバーに取り替えたとき、前記初期マーカ相対位置関係を基に、新規カンチレバー位置に対する新規レーザ光の相対的な位置を算出して目標位置マーカとして設定するとともに、前記目標位置マーカを原点とする座標系を設けたことを特徴とする。
【0016】
さらに本発明は、前記初期レーザ光輝度重心位置マーカを前記目標位置マーカに重ね合わせるための制御手段を備えたものである。
【0017】
カンチレバーの位置およびレーザ光の輝度重心位置を、前記ビデオカメラの画像上で、カンチレバー位置マーカおよびレーザ光輝度重心位置マーカとして表示し、そのマーカを用いて光軸調整を行う。
【発明の効果】
【0018】
光軸調整時に、観察者がビデオカメラ画像上で、カンチレバーの位置とレーザ光束の輝度重心位置を目視で明確に認識できるので、カンチレバーの位置とレーザ光輝度重心位置を一致させるのが容易になる。また、光軸調整完了後のカンチレバーの位置とレーザ光輝度重心位置のビデオカメラ画像上での位置関係を記憶することにより、そのデータに基づいて光軸調整を行うことができるので、カンチレバーを交換した際の粗調整が不要になる。さらに、座標が表示されることにより、レーザの移動方向と目標位置までの距離を認識することができるので調整がやり易くなる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施例である原子間力顕微鏡の要部の構成を概略的に示す図である。また、光軸調整に使用する光学顕微鏡およびビデオカメラも同時に図示されている。
【図2】本発明の実施例における光軸調整手順中の粗調整の手順を示す。図2(a)はカンチレバー位置にマーカを表示した状態を示す図である。図2(b)はレーザ光およびカンチレバー位置にマーカを表示した状態を示す図である。図2(c)はレーザ光のマーカをカンチレバーのマーカに重ねた状態を示す図である。
【図3】本発明の実施例における新規のカンチレバーの光軸調整の手順を示す。図3(a)は、微調整完了時に記憶されたカンチレバーとレーザ光の初期マーカ相対位置関係を示す図である。図3(b)は、新規のカンチレバー位置を示すマーカを表示し、そのマーカを基準に、記憶した初期マーカ相対位置関係からレーザ光の相対的な位置を算出し、その算出したマーカ位置を目標位置とする目標位置マーカを表示した状態を示す図である。
【図4】本発明の実施例において、新規のカンチレバーに対するレーザ光調整の目標位置を基準(座標0,0)としたレーザ光の位置座標を表示した状態を示す図である。
【図5】従来の原子間力顕微鏡の要部の構成を概略的に示す図である。また、光軸調整に使用する光学顕微鏡およびビデオカメラも同時に図示されている。
【発明を実施するための形態】
【0020】
図1に本発明の実施例である原子間力顕微鏡の要部の構成が概略的に示されている。また、光軸調整に使用される光学顕微鏡10とビデオカメラ11(例えばCCDカメラなど)も同時に図示されている。原子間力顕微鏡の主要部は、レーザ光源1と、ビームスプリッタ3と、カンチレバー2と、反射鏡4と、4分割光検出器5より構成される。レーザ光源1から出射されたレーザ光6はビームスプリッタ3を経てカンチレバー2に入射される。そのレーザ光6はカンチレバー2で反射されて、さらに反射鏡4を介して4分割光検出器5に導かれて検出される。なお、試料9は、カンチレバー2に備えられた探針7に対向して配置されている。
【0021】
次に、図1〜図4にしたがって、光軸調整の手順をステップごとに説明する。光軸調整作業には、観察用の光学顕微鏡10と倍率の高いビデオカメラ11が組み合わせて使用される。
【0022】
(第1ステップ)
光学顕微鏡10の観察視野にカンチレバー2とカンチレバー2や試料9で反射されたレーザ光6を捉え、次にビデオカメラ11にカンチレバー画像13とレーザ光束画像16を表示する。ビデオカメラ11の画像上では、レーザ光6の輝度が強いため、レーザ光6以外のカンチレバー画像部分が暗く表示されるので、輝度の高いレーザ光6をオフにして、光軸調整装置18により、カンチレバー画像13上にカンチレバー位置マーカ14が表示される。なお、カンチレバー位置マーカ14の表示は、ユーザーが手動により指定する手法や、パターンマッチング手法を用いた画像処理により行われる。また、本実施例では、カンチレバー位置マーカ14として丸印破線を使用している。その状態が図2(a)に示されている。
【0023】
(第2ステップ)
次に、レーザ光6をオンにして、ビデオカメラ11の画像上において、光軸調整装置18により、レーザ光束の輝度重心位置を画像処理により検出し、レーザ光束画像16上にレーザ光輝度重心位置マーカ15が表示される。本実施例では、レーザ光輝度重心位置マーカ15として丸印実線を使用している。さらに、輝度の高いレーザ光6のため暗く表示されるカンチレバー等を破線で表示している。その状態が図2(b)に示されている。
【0024】
(第3ステップ)
次に、レーザ光調整つまみ19、20によりレーザ光源1を水平および垂直方向に動かしながら、ビデオカメラ11の画像上で、レーザ光輝度重心位置マーカ15をカンチレバー位置マーカ14まで移動させる。レーザ光6の照射位置の移動に追随してビデオカメラ11の画像上のレーザ光輝度重心位置マーカ15も移動し、レーザ光輝度重心位置マーカ15とカンチレバー位置マーカ14が重なると、光軸調整装置18により粗調整完了の合図がビデオカメラ11の画像上に表示される。その状態が図2(c)に示されている。
【0025】
(第4ステップ)
従来と同様に、カンチレバー2で反射されたレーザ光6を4分割光検出器5の直前で紙片に映し、レーザ光6が最も明るく、丸く、映るようにレーザ光調整つまみ19、20によってレーザ光6の照射位置を調整する。このステップを微調整という。
【0026】
この微調整完了時に、ビデオカメラ11の画像上でのレーザ光輝度重心位置マーカ15とカンチレバー位置マーカ14の初期マーカ相対位置関係を、図3(a)に示す状態で光軸調整装置18に記憶させる。なお、光軸調整装置18はレーザ光輝度重心位置マーカ15およびカンチレバー位置マーカ14の位置座標の記憶および表示手段を備えている。次に、カンチレバー2で反射されたレーザ光6が4分割光検出器5の中央に当たるように4分割光検出器5の位置を調整して光軸調整は完了する。ここまでのステップは、1個目のカンチレバー、即ち初期カンチレバーに対する初期光軸調整である。
【0027】
原子間力顕微鏡では、近接する試料表面を走査する際、カンチレバーが直接試料に接することにより探針の消耗が発生する。そのためカンチレバーを頻繁に交換することが行われ、その交換のたびに光軸調整が必要となる。したがって、交換された新規のカンチレバーの光軸調整方法が、次の第5ステップに記述されている。
【0028】
(第5ステップ)
初期カンチレバーを新規のカンチレバーに取り替えた後、輝度の高いレーザ光6をオフにして、光軸調整装置18により、図3(b)に示すとおり新規のカンチレバー画像33上に新規のカンチレバー位置マーカ34が第1ステップと同様に表示される。次に、新規のカンチレバー位置マーカ34を基準に、図3(a)に示す微調整完了時に記憶された初期マーカ相対位置関係を基に、新規カンチレバー位置に対する新規レーザ光の相対的な位置を算出して目標位置マーカ35を設定する。その状態が図3(b)に示されている。次に、レーザ光調整つまみ19、20によって、ビデオカメラ11の画像上でレーザ光輝度重心位置マーカ15を目標位置マーカ35に重ねることにより光軸調整が完了する。したがって、カンチレバーを新規に取り替えるたびに第5ステップにしたがって光軸調整が行われる。
【0029】
第5ステップにおいて、図4に示すとおり、光軸調整装置18により、ビデオカメラ11の画像上で、目標位置マーカ35を基準(座標0,0)とした新しい座標系において、レーザ光束画像16上に表示されたレーザ光輝度重心位置マーカ15の位置座標が表示される。また、光軸調整装置18により、レーザ光輝度重心位置マーカ15の位置はレーザ光6の移動に伴ってその位置座標が刻々更新される。そのため、レーザ光輝度重心位置マーカ15の座標数値によって、レーザ光輝度重心位置マーカ15を目標位置マーカ35に重ねるために移動すべき距離と移動すべき方向を認識することができ、さらに、レーザ光調整つまみ19、20を動かすことによる位置座標の変化によって、移動した距離と移動方向を認識することができる。
【0030】
また、原子間力顕微鏡ヘッドの揺れによりビデオカメラ11の画像上の目標位置マーカ35とレーザ光輝度重心位置マーカ15は同時に揺れることにより、目標位置マーカ35を基準とするレーザ光輝度重心位置マーカ15の位置座標は揺れの影響を受けない。
【0031】
さらに、手動の光軸調整用のレーザ光調整つまみ19、20をモータ駆動(図示せず)に変更することにより光軸調整を自動化することができる。前記のとおり、図4に示すビデオカメラ11の画像上に、目標位置マーカ35を基準としたレーザ光輝度重心位置マーカ15の位置座標を表示し、その目標位置マーカ35にレーザ光輝度重心位置マーカ15の位置を一致させるための、すなわち両マーカ間の距離をゼロにするためのフィードバック制御を行うことにより光軸調整の自動化が可能となる。なお、光軸調整装置18は、前記フィードバック制御を行う制御手段を備えている。
【0032】
なお、図1〜図4において同符号は同一物または同一の事柄を表す。
【符号の説明】
【0033】
1、21 レーザ光源
2、22 カンチレバー
3 ビームスプリッタ
4、23、24 反射鏡
5、25 4分割光検出器
6、26 レーザ光
7、27 探針
9、29 試料
10、40 光学顕微鏡
11、41 ビデオカメラ
13、33 カンチレバー画像
14、34 カンチレバー位置マーカ
15 レーザ光輝度重心位置マーカ
16 レーザ光束画像
18 光軸調整装置
19、20 レーザ光調整つまみ
35 目標位置マーカ
【特許請求の範囲】
【請求項1】
試料に対向すべく配置された探針を備えたカンチレバーと、レーザ光を出力するレーザ光源と、前記レーザ光源から照射されるレーザ光を前記カンチレバーへ導く第1反射器と、前記カンチレバーで反射されたレーザ光を光検出器へ導く第2反射器と、前記レーザ光を検出する光検出器と、前記レーザ光の光軸調整のためにカンチレバー近接位置を観察するビデオカメラと、を備えた走査型プローブ顕微鏡において、前記カンチレバーの位置を示すカンチレバー位置マーカと、前記レーザ光の輝度重心位置を示すレーザ光輝度重心位置マーカと、をビデオカメラの画像上に表示する表示手段を備えるとともに、前記レーザ光の移動に追随してレーザ光輝度重心位置マーカもビデオカメラの画像上で移動することを特徴とする走査型プローブ顕微鏡。
【請求項2】
初期カンチレバーに対する初期光軸調整完了後の、初期カンチレバー位置マーカと初期レーザ光輝度重心位置マーカの位置関係を示す初期マーカ相対位置関係を、記憶および表示する記憶・表示手段を備えたことを特徴とする請求項1記載の走査型プローブ顕微鏡。
【請求項3】
前記初期カンチレバーを新規カンチレバーに取り替えたとき、前記初期マーカ相対位置関係を基に、新規カンチレバー位置に対する新規レーザ光の相対的な位置を算出して目標位置マーカとして設定するとともに、前記目標位置マーカを原点とする座標系を設けたことを特徴とする請求項2記載の走査型プローブ顕微鏡。
【請求項4】
前記初期レーザ光輝度重心位置マーカを前記目標位置マーカに重ね合わせるための制御手段を備えたことを特徴とする請求項3記載の走査型プローブ顕微鏡。
【請求項1】
試料に対向すべく配置された探針を備えたカンチレバーと、レーザ光を出力するレーザ光源と、前記レーザ光源から照射されるレーザ光を前記カンチレバーへ導く第1反射器と、前記カンチレバーで反射されたレーザ光を光検出器へ導く第2反射器と、前記レーザ光を検出する光検出器と、前記レーザ光の光軸調整のためにカンチレバー近接位置を観察するビデオカメラと、を備えた走査型プローブ顕微鏡において、前記カンチレバーの位置を示すカンチレバー位置マーカと、前記レーザ光の輝度重心位置を示すレーザ光輝度重心位置マーカと、をビデオカメラの画像上に表示する表示手段を備えるとともに、前記レーザ光の移動に追随してレーザ光輝度重心位置マーカもビデオカメラの画像上で移動することを特徴とする走査型プローブ顕微鏡。
【請求項2】
初期カンチレバーに対する初期光軸調整完了後の、初期カンチレバー位置マーカと初期レーザ光輝度重心位置マーカの位置関係を示す初期マーカ相対位置関係を、記憶および表示する記憶・表示手段を備えたことを特徴とする請求項1記載の走査型プローブ顕微鏡。
【請求項3】
前記初期カンチレバーを新規カンチレバーに取り替えたとき、前記初期マーカ相対位置関係を基に、新規カンチレバー位置に対する新規レーザ光の相対的な位置を算出して目標位置マーカとして設定するとともに、前記目標位置マーカを原点とする座標系を設けたことを特徴とする請求項2記載の走査型プローブ顕微鏡。
【請求項4】
前記初期レーザ光輝度重心位置マーカを前記目標位置マーカに重ね合わせるための制御手段を備えたことを特徴とする請求項3記載の走査型プローブ顕微鏡。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−225722(P2012−225722A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−92634(P2011−92634)
【出願日】平成23年4月19日(2011.4.19)
【出願人】(000001993)株式会社島津製作所 (3,708)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月19日(2011.4.19)
【出願人】(000001993)株式会社島津製作所 (3,708)
[ Back to top ]