
走査型測距測角センサ用データ処理装置
【課題】処理能力の制約や移動体の運動や動揺に関わらず移動体と対象物間の相対距離と相対姿勢を高速,高精度に取得する。
【解決手段】開示される走査型測距測角センサ用データ処理装置は、受信強度信号10と距離計測信号11とAZ角度計測信号12を生成する2軸駆動型測距/測角センサ1と、有効強度信号14と有効距離信号18と有効AZ角度信号19と有効EL角度信号20を生成するデータ切り出し処理器2と、データインデックス信号15を生成する有効データ2値化処理器3と、データ集中度インデックス信号16を生成するデータ集中度判定処理器4と、グループ化データインデックス信号17を生成するデータグルーピング処理器5と、ターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とグループデータ個数信号24を生成するターゲット抽出/距離・角度生成器6と、その各信号を格納する測距/測角データ格納メモリ7を備える。
【解決手段】開示される走査型測距測角センサ用データ処理装置は、受信強度信号10と距離計測信号11とAZ角度計測信号12を生成する2軸駆動型測距/測角センサ1と、有効強度信号14と有効距離信号18と有効AZ角度信号19と有効EL角度信号20を生成するデータ切り出し処理器2と、データインデックス信号15を生成する有効データ2値化処理器3と、データ集中度インデックス信号16を生成するデータ集中度判定処理器4と、グループ化データインデックス信号17を生成するデータグルーピング処理器5と、ターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とグループデータ個数信号24を生成するターゲット抽出/距離・角度生成器6と、その各信号を格納する測距/測角データ格納メモリ7を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対象物上にターゲットとして設置された反射体と移動体との間の相対距離と相対姿勢角とを、移動体自体の運動や外的要因に基づく動揺に影響されずに、高速かつ高精度に取得可能な、移動体搭載用の走査型測距測角センサ用データ処理装置に関する。
【背景技術】
【0002】
宇宙機や飛翔体、航空機や車両等の移動体に搭載し、データ処理能力に制約がありかつ移動体自体の運動や外的要因によって生じる動揺にも関わらず、ターゲットとして対象物上に設置された反射体と移動体との間の相対距離と相対姿勢角とを取得可能な、走査型測距測角センサ用データ処理装置としては、既に知られたものがある。
【0003】
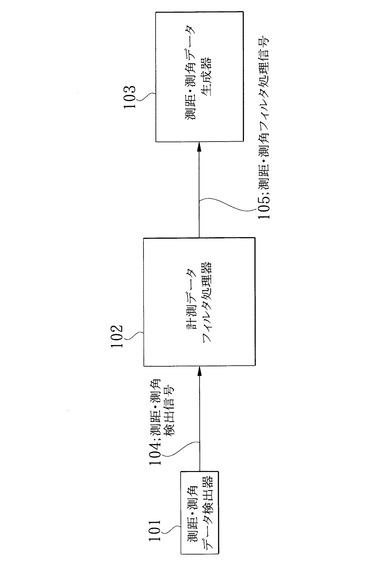
図5は、従来の走査型測距測角センサ用データ処理装置の一例を示すブロック図である。この走査型測距測角センサ用データ処理装置は、図示のように、測距・測角データ検出器101と、計測データフィルタ処理器102と、測距・測角データ生成器103とから概略構成されている。
【0004】
測距・測角データ検出器101は、移動体に搭載されていて、対象物上に設置されたターゲットを走査することによって、対象物と移動体との相対距離および相対姿勢を検出して、測距・測角検出信号104を生成する。
計測データフィルタ処理器102は、測距・測角検出信号104に含まれる計測ノイズなどを除去処理して、測距・測角フィルタ処理信号105を生成する。
測距・測角データ生成器103は、測距・測角フィルタ処理信号105によって、ターゲットに対する移動体の相対距離および相対姿勢のデータを生成する。
【0005】
このとき図5において、測距・測角データ検出器101から発生する測距・測角検出信号104は、測距・測角データ検出器101の走査に応じて計測される、移動体のターゲットに対する相対距離・姿勢角のデータとなるが、計測データフィルタ処理器102において、計測した測距・測角検出信号104を走査方向に準じた2次元画像として再配置することにより、2次元画像データに対する汎用的なデジタル画像処理技術を測距・測角検出信号104に対し適用することが可能となる。
【0006】
そこで、計測データフィルタ処理器102において適用可能な2次元画像データ処理の一例として、例えば特開2004−128839号公報などに示された従来の画像処理装置では、画像データを2値化処理後、要求される解像度に応じ実施する画像データに対するライン単位の間引き処理の結果生じる画像劣化を防止するため、誤差拡散処理時に参照する重み付けフィルタマトリックスを、間引きに応じて選択的に切り換えることによって間引き画像のテクスチャの乱れを抑制し、その結果として画像の劣化防止を実現している(特許文献1参照)。
【0007】
一方、例えば特開2006−295379号広報に記載された技術では、走査に応じて取得したラインデータで構成する2次元画像データに対する回転処理において、画像領域内にある全ての画素に対しアフィン変換など処理負荷の高い座標変換処理を実施することなく、ラインデータ保持メモリの活用と補間処理とだけで画像データの回転処理を行うことが可能となる(特許文献2参照)。
【0008】
さらに、例えば特開2006−275964号広報に記載された技術では、2軸のガルバノミラー等を利用して2次元平面を高速走査することで2次元画像を取得する共焦点レーザ走査型顕微鏡(CLSM:Conforcal Laser Scanning Microscope)やレーザ走査型サイトメータ(LSC:Laser Scanning Cytmeter)において必須となる、走査範囲内照度較正係数マップ算出(シェーディング補正)の具体的手法として、有効範囲にある2次元画像全体に対し事前に1回走査した結果から、シェーディング補正用の照度較正係数マップを最適に生成することによって、高精度、高性能な画像解析を実現可能としている(特許文献3参照)。
【特許文献1】特開2004−128839号公報
【特許文献2】特開2006−295379号公報
【特許文献3】特開2006−275964号広報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、図5に示されたような走査型測距測角センサ用データ処理装置では、生々される測距・測角データの高精度化要求に伴い計測データフィルタ処理器102での測距・測角検出信号104に対するデータ処理負荷が増加するため、測距・測角データのリアルタイム生成を優先した場合、結果的に計測データの精度を劣化させてしまうという問題点がある。
【0010】
一方、特許文献1に記載された技術では、入力された画像データを2値化し誤差拡散処理後にライン画像データを間引くことで処理負荷低減化を図っているものの、誤差拡散処理部分において入力画像データに応じたフィルタマトリクスの切り換え処理など全データを対象とした条件判断処理が避けられず、さらに2値化処理部にパターンディザ処理などが含まれるため、結局、データ間引きによる処理負荷低減の効果が相殺されてしまうという問題点がある。
【0011】
また、特許文献2に記載された技術では、取得したラインデータに対しアフィン変換など複雑な演算処理を適用しないことで処理負荷低減をデータ補間の精度には限界があることから、この場合でも処理負荷/リアルタイム性と精度に関するトレードオフは避けることはできないという問題点がある。
【0012】
さらに、特許文献3に記載された技術では、特にデータ処理負荷という観点は考慮せずに走査画像データ毎に照度較正係数マップを生成してシェーディング補正を実施することから、結果的に処理負荷増加は避けられず、リアルタイム性の確保が困難であるという問題点がある。
【課題を解決するための手段】
【0013】
上記課題を解決するため、この発明は走査型測距測角センサ用データ処理装置に係り、飛翔体や宇宙機や航空機や車両など移動体に搭載しターゲットとして対象物上に設置した反射体と上記移動体との相対距離と相対姿勢角とを計測する走査型測距測角センサ用データ処理装置であって、上記移動体に搭載し上記移動体と上記反射体を搭載した上記対象物との間の相対距離と相対姿勢角と受信強度信号とを検出するための2軸駆動型測距/測角センサと、上記2軸駆動型測距/測角センサが検出した上記相対距離と上記相対姿勢角と上記受信強度信号とから精度が保証できる有効相対距離と有効相対姿勢角と有効強度信号とを抽出するためのデータ切り出し処理手段と、上記データ切り出し処理手段により生成した上記有効強度信号に対して、その強度値およびその変動量と予め設定された閾値とを比較して2値化処理を行ってデータインデックス信号を発生するための有効データ2値化処理手段と、上記データ切り出し処理手段が生成する上記有効強度信号の値に応じて2値化処理しデータインデックス信号を発生するための有効データ2値化処理手段と、2値化データである上記データインデックス信号から上記2軸駆動型測距/測角センサにより検出したデータの集中度を判定しデータ集中度インデックス信号を生成するデータ集中度判定処理手段と、上記データ集中度インデックス信号から上記2軸駆動型測距/測角センサにより検出したデータのグループ分けのためのグループ化データインデックス信号を生成するためのデータグルーピング処理手段と、上記有効強度信号と上記相対距離と上記相対姿勢角と上記グループ化データインデックス信号とからグループ毎に上記移動体と上記反射体間との上記相対距離と上記相対姿勢角とともに処理に適用したグループ毎のデータ個数を生成するターゲット抽出/距離・角度生成手段と、上記ターゲット抽出/距離・角度生成手段が生成したデータを格納するための測距/測角データ格納メモリと、を備えたことを特徴としている。
【発明の効果】
【0014】
本発明の走査型測距測角センサ用データ処理装置では、走査型測距測角センサの2軸走査駆動によりラインデータとして取得されるターゲットに対する受信強度信号の変動/揺らぎから取得データの有効性を判定すると同時にその2値化信号を生成し、その2値化信号を走査方向に準じ再配置した2次元画像データに対し取得データの集中度判定およびグルーピング処理を実施することで、検出した測距・測角データ自体を直接フィルタ処理するのでは処理負荷の観点から不可能なリアルタイム性の確保が実現可能となる。
【0015】
このように、本発明の走査型測距測角センサ用データ処理装置によれば、2軸駆動型測距/測角センサに対し、2次元画像データとして計測される受信強度信号の変動からデータの有効性を判定した後その2値化データを生成するので、2値化データに対するフィルタリングならびにグルーピング処理が高速・高精度に実施可能となり、その結果、移動体搭載用計算機などデータ処理能力に制約のある構成/環境下においても計測データの精度劣化を伴うことなく、データ処理のリアルタイム性と高精度化の両立を達成することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明を実施するための最良の形態について、図面を参照しながら詳細に説明する。
【実施形態】
【0017】
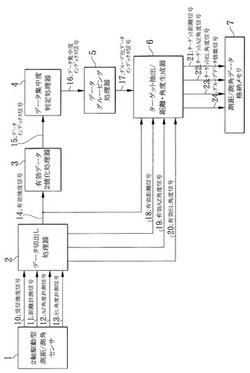
図1は、本発明の一実施形態となる走査型測距測角センサ用データ処理装置をブロック図によって示したものである。この走査型測距測角センサ用データ処理装置は、2軸駆動型測角センサ1、データ切り出し処理器2、有効データ2値化処理器3、データ集中度判定処理器4、データグルーピング処理器5、ターゲット抽出/距離・角度生成器6、測距/測角データ格納メモリ7からなる概略構成を有している。
【0018】
受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13、有効強度信号14、データインデックス信号15、データ集中度インデックス信号16、グループ化データインデックス信号17、有効距離信号18、有効AZ角度信号19、有効EL角度信号20、ターゲット距離信号21、ターゲットAZ角度信号22、ターゲットEL角度信号23、グループデータ個数信号24によって構成される。
【0019】
本発明の実施の形態に係る走査型測距測角センサ用データ処理装置は図1に示すように、2軸駆動型測距/測角センサ1により検出した受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13から、データ切り出し処理器2において、有効強度信号14、有効距離信号18、有効AZ角度信号19、有効EL角度信号20を生成した後、有効データ2値化処理器3で、有効強度信号14のみを用いて、走査順に検出した受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13が有効データかどうか判定し、その結果をデータインデックス信号15として出力する。
【0020】
次にデータ集中度判定処理器4では、入力されたデータインデックス信号15を2次元マトリックスデータとして展開しながら2次元平面上でのデータ集中度を判定し、その結果をデータ集中度インデックス信号16として生成後、データグルーピング処理器5において、入力されたデータ集中度インデックス信号16に基づくグループ化データインデックス信号17を発生する。
【0021】
さらにターゲット抽出/距離・角度生成器6において、データ切り出し処理器2で生成した有効強度信号14、有効距離信号18、有効AZ角度信号19、有効EL角度信号20と、データグルーピング処理器5で生成したグループ化データインデックス信号17とから、ターゲット距離信号21、ターゲットAZ角度信号22、ターゲットEL角度信号23、グループデータ個数信号24を生成した後、測距/測角データ格納メモリ7へ格納する。
【0022】
次に、図1に示す本実施形態の動作について、具体例として移動体である台車に2軸駆動型測距/測角センサ1を搭載し、地上に固定したターゲットに対する相対距離および相対姿勢角を計測する場合を説明する。
【0023】
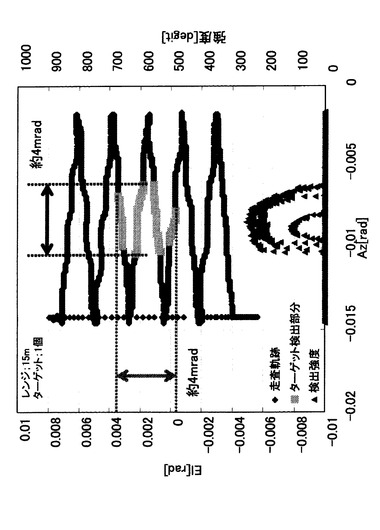
まず2軸駆動型測距/測角センサ1では、移動体側からターゲット方向を走査することによりターゲットに対する受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13を検出する。ここで図2は、上側図がAZ角度計測信号12を水平軸、EL角度計測信号13を垂直軸に配した時の2次元走査軌跡図にターゲット検出部分を加えた図であり、下側図は受信強度信号10の変動図である。
【0024】
図2で示す結果は、2軸駆動型測距/測角センサ1の視野中心に直径4mradの円形ターゲットを置き、2軸駆動型測距/測角センサ1をAZ軸(水平軸)方向(水平方向)の左から右へ5回の往復運動と、EL軸(垂直軸)方向(垂直方向)の下から上への一方向走査とを同時に実施している。このときデータ切り出し処理器2では図2中で上側の走査軌跡図に示すように、この走査軌跡に沿って距離計測信号11、AZ角度計測信号12、EL角度計測信号13および受信強度信号10を計測し、図の両端に見られる走査折り返し部分など計測精度が極端に劣化する部分を除去することで、それぞれ有効距離信号18、有効AZ角度信号19、有効EL角度信号20および有効強度信号14を2次元インデックス付きデータとして発生する。
【0025】
一方、図2中の下側図は、横軸をAZ軸方向(水平方向)、縦軸を受信強度値とした時の受信強度信号10を示したものであり、ここからターゲット検出部分で受信強度値が増加しそれ以外の部分では受信強度値は「0」という値が生成されていることがわかる。データ切り出し処理器2が発生する有効強度信号14は、図2中の下側図に示す受信強度信号10のうち、図2中の上側図で見られるグラフ両端の走査折り返し部分など、計測精度が極端に劣化している部分を取り除いたものである。
【0026】
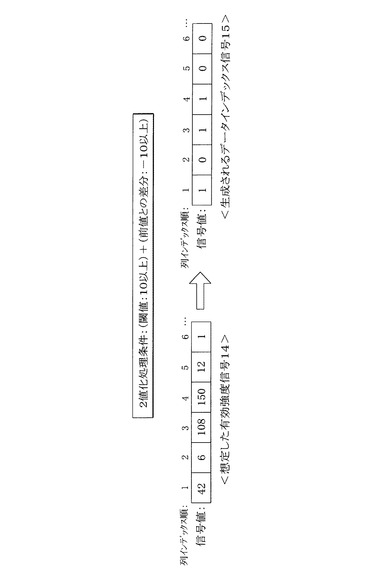
次に有効データ2値化処理器3では、データ切り出し処理器2により生成したインデックス付きの有効強度信号14(図2中の下側図参照)に対し、列インデックス順に検出した強度値およびその変動量と事前設定した閾値とを比較しながら、検出信号が有効なデータであるかどうかを判定し、有効データである場合は「1」、それ以外は「0」と有効強度信号14自体の値を置き換えることで、データインデックス信号15を発生する。
【0027】
図3は仮に想定した有効強度信号14と、この強度データに対し一例として2値化処理条件を閾値「10」、前値との差分「−10」と設定したとき、生成されるデータインデックス信号15との対応関係を示したものである。有効データ2値化処理器3は、入力された有効強度信号14を行ごとに列インデックス順に取り込んだ上で、列インデックス1が付与された各列の最初のデータに対しては設定した閾値「10」と検出値のみを比較し、検出値が閾値以上の場合は「1」、閾値未満の場合は「0」と設定する。
【0028】
さらに列インデックスが2以上の列データに対しては、評価対象となる検出値が設定した閾値以上かどうかに加え、列インデックスが1少ない隣り合う検出値との変動差が設定値(ここでは「−10」)以上の場合のみ「1」、それ以外の場合は「0」と設定する。図3右側に示すデータインデックス信号15は、この条件に従って左側に示す有効強度信号14から生成する2値化データの一例である。
【0029】
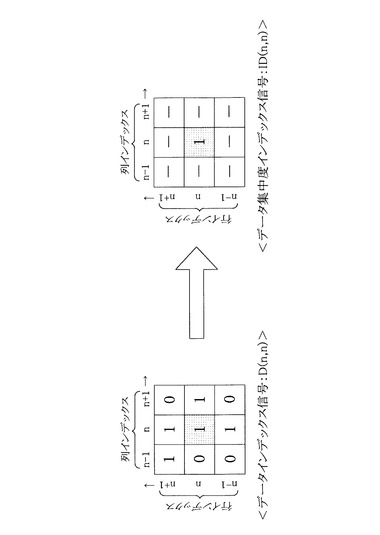
またデータ集中度判定処理器4では、行インデックスと列インデックスとからなる2次元インデックスを用いて、図4のように表されるデータインデックス信号15に対し、当該検出値D(n,n)=1と、その値を取り囲むように配置されたデータインデックスの異なる8個の検出値を合算した値が、データ集中度に関し設定した閾値(ここでは合算値は「5」であるため、閾値を「4」と設定すればID(n,n)=1となる)より大きな値であった場合に限りID(n,n)=1、それ以外はID(n,n)=0と設定し直したものを、データ集中度インデックス信号16として発生する。この処理をデータインデックス信号15に対し実施することで、誤検出などによるノイズデータの除去とデータ集中度の強調を同時に達成できる。
【0030】
さらにデータグルーピング処理器5では、データ集中度判定処理器4により生成されるデータ集中度インデックス信号16に対し、2次元インデックスのすべての行またはすべての列が「0」となっているインデックス値をすべて抽出した上で、インデックス「0」に囲まれたインデックス「1」のデータ群を1つのグループとして設定した後、その結果をグループ化データインデックス信号17として生成する。
【0031】
最後にターゲット抽出/距離・角度生成器6では、データ切り出し処理器2で生成した有効距離信号18、有効AZ角度信号19、有効EL角度信号20に対し、データグルーピング処理器5で発生するグループ化データインデックス信号17に基づいて、各データをそれぞれグループごとに平均化した後、その平均化信号をそれぞれ平均化計算で適用したデータ個数とともに、ターゲット距離信号21、ターゲットAZ角度信号22、ターゲットEL角度信号23、グループデータ個数信号24として生成し、これらの信号をすべて測距/測角データ格納メモリ7へ格納する。
【0032】
従って本発明では、2軸駆動型測距/測角センサ1で計測した受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13に対し、検出信号をそのまま直接処理するのではなく、受信強度信号10のみを用いてデータのフィルタリングや集中度およびグルーピングインデックスを導出し、この結果からターゲット距離信号21、ターゲットAZ角度信号22、ターゲットEL角度信号23、グループデータ個数信号24を生成する構成となる。
【0033】
以上、説明したように本実施形態によれば、特に煩雑な処理を必要とする検出データに対するフィルタリングや集中度判定およびグルーピングを、受信強度信号10から得られる2次元の整数行列に対する条件分岐処理のみで実施しているため、宇宙機や飛翔体、航空機や車両など移動体に搭載可能な処理能力に制約のある場合でも、高精度なターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とを、リアルタイムに発生することが可能となる。
【0034】
特に、ここで示した有効データ2値化処理器3とデータ集中度判定処理器4との組み合わせ構成による、2値化データに対するフィルタリング処理とデータ集中度判定は、処理負荷の低減と生成データの高精度化を同時に実現するために工夫した独自技術であり、特開2004−128839号公報記載の発明など、従来技術の組み合わせにより容易に類推できるものではない。
【0035】
以上、この発明の実施形態を図面により詳述してきたが、具体的な構成は上記の実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計の変更等があってもこの発明に含まれる。例えば、2軸走査駆動によりラインデータとして取得される種々の2次元化可能なターゲットデータに対しても適用することができる。
【産業上の利用可能性】
【0036】
本発明の走査型測距測角センサ用データ処理装置は、処理能力に制約のある移動体搭載状態で、移動体自体の運動や移動体上において被る外的要因により生じる動揺に関わらず、ターゲットとして対象物上に設置された反射体を用いて、移動体と対象物との間で相対距離と相対姿勢とのデータを取得することが必要な各種の場合に、利用することが可能である。
【図面の簡単な説明】
【0037】
【図1】本発明の一実施形態を示すブロック図である。
【図2】同実施形態において、2軸駆動型測距/測角センサ1によって計測されるデータの一例を示すグラフである。
【図3】同実施形態における有効データ2値化処理器3に対する、入力信号である有効強度データ14と、出力信号であるデータインデックス信号15との関係の一例を示す図である。
【図4】同実施形態におけるデータ集中度判定処理器4の動作を説明するための、データインデックス信号15の一例を示す図である。
【図5】従来方式の一例を示すブロック図である。
【符号の説明】
【0038】
1 2軸駆動型測距/測角センサ
2 データ切り出し処理器(データ切り出し処理手段)
3 有効データ2値化処理器(有効データ2値化処理手段)
4 データ集中度判定処理器(データ集中度判定処理手段)
5 データグルーピング処理器(データグルーピング処理手段)
6 ターゲット抽出/距離・角度生成器(ターゲット抽出/距離・角度生成手段)
7 測距/測角データ格納メモリ
10 受信強度信号
11 距離計測信号
12 AZ角度計測信号
13 EL角度計測信号
14 有効強度信号
15 データインデックス信号
16 データ集中度インデックス信号
17 グループ化データインデックス信号
18 有効距離信号
19 有効AZ角度信号
20 有効EL角度信号
21 ターゲット距離信号
22 ターゲットAZ角度信号
23 ターゲットEL角度信号
24 グループデータ個数信号
101 測距・測角データ検出器
102 計測データフィルタ処理器
103 測距・測角データ生成器
104 測距・測角検出信号
105 測距・測角フィルタ処理信号
【技術分野】
【0001】
本発明は、対象物上にターゲットとして設置された反射体と移動体との間の相対距離と相対姿勢角とを、移動体自体の運動や外的要因に基づく動揺に影響されずに、高速かつ高精度に取得可能な、移動体搭載用の走査型測距測角センサ用データ処理装置に関する。
【背景技術】
【0002】
宇宙機や飛翔体、航空機や車両等の移動体に搭載し、データ処理能力に制約がありかつ移動体自体の運動や外的要因によって生じる動揺にも関わらず、ターゲットとして対象物上に設置された反射体と移動体との間の相対距離と相対姿勢角とを取得可能な、走査型測距測角センサ用データ処理装置としては、既に知られたものがある。
【0003】
図5は、従来の走査型測距測角センサ用データ処理装置の一例を示すブロック図である。この走査型測距測角センサ用データ処理装置は、図示のように、測距・測角データ検出器101と、計測データフィルタ処理器102と、測距・測角データ生成器103とから概略構成されている。
【0004】
測距・測角データ検出器101は、移動体に搭載されていて、対象物上に設置されたターゲットを走査することによって、対象物と移動体との相対距離および相対姿勢を検出して、測距・測角検出信号104を生成する。
計測データフィルタ処理器102は、測距・測角検出信号104に含まれる計測ノイズなどを除去処理して、測距・測角フィルタ処理信号105を生成する。
測距・測角データ生成器103は、測距・測角フィルタ処理信号105によって、ターゲットに対する移動体の相対距離および相対姿勢のデータを生成する。
【0005】
このとき図5において、測距・測角データ検出器101から発生する測距・測角検出信号104は、測距・測角データ検出器101の走査に応じて計測される、移動体のターゲットに対する相対距離・姿勢角のデータとなるが、計測データフィルタ処理器102において、計測した測距・測角検出信号104を走査方向に準じた2次元画像として再配置することにより、2次元画像データに対する汎用的なデジタル画像処理技術を測距・測角検出信号104に対し適用することが可能となる。
【0006】
そこで、計測データフィルタ処理器102において適用可能な2次元画像データ処理の一例として、例えば特開2004−128839号公報などに示された従来の画像処理装置では、画像データを2値化処理後、要求される解像度に応じ実施する画像データに対するライン単位の間引き処理の結果生じる画像劣化を防止するため、誤差拡散処理時に参照する重み付けフィルタマトリックスを、間引きに応じて選択的に切り換えることによって間引き画像のテクスチャの乱れを抑制し、その結果として画像の劣化防止を実現している(特許文献1参照)。
【0007】
一方、例えば特開2006−295379号広報に記載された技術では、走査に応じて取得したラインデータで構成する2次元画像データに対する回転処理において、画像領域内にある全ての画素に対しアフィン変換など処理負荷の高い座標変換処理を実施することなく、ラインデータ保持メモリの活用と補間処理とだけで画像データの回転処理を行うことが可能となる(特許文献2参照)。
【0008】
さらに、例えば特開2006−275964号広報に記載された技術では、2軸のガルバノミラー等を利用して2次元平面を高速走査することで2次元画像を取得する共焦点レーザ走査型顕微鏡(CLSM:Conforcal Laser Scanning Microscope)やレーザ走査型サイトメータ(LSC:Laser Scanning Cytmeter)において必須となる、走査範囲内照度較正係数マップ算出(シェーディング補正)の具体的手法として、有効範囲にある2次元画像全体に対し事前に1回走査した結果から、シェーディング補正用の照度較正係数マップを最適に生成することによって、高精度、高性能な画像解析を実現可能としている(特許文献3参照)。
【特許文献1】特開2004−128839号公報
【特許文献2】特開2006−295379号公報
【特許文献3】特開2006−275964号広報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、図5に示されたような走査型測距測角センサ用データ処理装置では、生々される測距・測角データの高精度化要求に伴い計測データフィルタ処理器102での測距・測角検出信号104に対するデータ処理負荷が増加するため、測距・測角データのリアルタイム生成を優先した場合、結果的に計測データの精度を劣化させてしまうという問題点がある。
【0010】
一方、特許文献1に記載された技術では、入力された画像データを2値化し誤差拡散処理後にライン画像データを間引くことで処理負荷低減化を図っているものの、誤差拡散処理部分において入力画像データに応じたフィルタマトリクスの切り換え処理など全データを対象とした条件判断処理が避けられず、さらに2値化処理部にパターンディザ処理などが含まれるため、結局、データ間引きによる処理負荷低減の効果が相殺されてしまうという問題点がある。
【0011】
また、特許文献2に記載された技術では、取得したラインデータに対しアフィン変換など複雑な演算処理を適用しないことで処理負荷低減をデータ補間の精度には限界があることから、この場合でも処理負荷/リアルタイム性と精度に関するトレードオフは避けることはできないという問題点がある。
【0012】
さらに、特許文献3に記載された技術では、特にデータ処理負荷という観点は考慮せずに走査画像データ毎に照度較正係数マップを生成してシェーディング補正を実施することから、結果的に処理負荷増加は避けられず、リアルタイム性の確保が困難であるという問題点がある。
【課題を解決するための手段】
【0013】
上記課題を解決するため、この発明は走査型測距測角センサ用データ処理装置に係り、飛翔体や宇宙機や航空機や車両など移動体に搭載しターゲットとして対象物上に設置した反射体と上記移動体との相対距離と相対姿勢角とを計測する走査型測距測角センサ用データ処理装置であって、上記移動体に搭載し上記移動体と上記反射体を搭載した上記対象物との間の相対距離と相対姿勢角と受信強度信号とを検出するための2軸駆動型測距/測角センサと、上記2軸駆動型測距/測角センサが検出した上記相対距離と上記相対姿勢角と上記受信強度信号とから精度が保証できる有効相対距離と有効相対姿勢角と有効強度信号とを抽出するためのデータ切り出し処理手段と、上記データ切り出し処理手段により生成した上記有効強度信号に対して、その強度値およびその変動量と予め設定された閾値とを比較して2値化処理を行ってデータインデックス信号を発生するための有効データ2値化処理手段と、上記データ切り出し処理手段が生成する上記有効強度信号の値に応じて2値化処理しデータインデックス信号を発生するための有効データ2値化処理手段と、2値化データである上記データインデックス信号から上記2軸駆動型測距/測角センサにより検出したデータの集中度を判定しデータ集中度インデックス信号を生成するデータ集中度判定処理手段と、上記データ集中度インデックス信号から上記2軸駆動型測距/測角センサにより検出したデータのグループ分けのためのグループ化データインデックス信号を生成するためのデータグルーピング処理手段と、上記有効強度信号と上記相対距離と上記相対姿勢角と上記グループ化データインデックス信号とからグループ毎に上記移動体と上記反射体間との上記相対距離と上記相対姿勢角とともに処理に適用したグループ毎のデータ個数を生成するターゲット抽出/距離・角度生成手段と、上記ターゲット抽出/距離・角度生成手段が生成したデータを格納するための測距/測角データ格納メモリと、を備えたことを特徴としている。
【発明の効果】
【0014】
本発明の走査型測距測角センサ用データ処理装置では、走査型測距測角センサの2軸走査駆動によりラインデータとして取得されるターゲットに対する受信強度信号の変動/揺らぎから取得データの有効性を判定すると同時にその2値化信号を生成し、その2値化信号を走査方向に準じ再配置した2次元画像データに対し取得データの集中度判定およびグルーピング処理を実施することで、検出した測距・測角データ自体を直接フィルタ処理するのでは処理負荷の観点から不可能なリアルタイム性の確保が実現可能となる。
【0015】
このように、本発明の走査型測距測角センサ用データ処理装置によれば、2軸駆動型測距/測角センサに対し、2次元画像データとして計測される受信強度信号の変動からデータの有効性を判定した後その2値化データを生成するので、2値化データに対するフィルタリングならびにグルーピング処理が高速・高精度に実施可能となり、その結果、移動体搭載用計算機などデータ処理能力に制約のある構成/環境下においても計測データの精度劣化を伴うことなく、データ処理のリアルタイム性と高精度化の両立を達成することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明を実施するための最良の形態について、図面を参照しながら詳細に説明する。
【実施形態】
【0017】
図1は、本発明の一実施形態となる走査型測距測角センサ用データ処理装置をブロック図によって示したものである。この走査型測距測角センサ用データ処理装置は、2軸駆動型測角センサ1、データ切り出し処理器2、有効データ2値化処理器3、データ集中度判定処理器4、データグルーピング処理器5、ターゲット抽出/距離・角度生成器6、測距/測角データ格納メモリ7からなる概略構成を有している。
【0018】
受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13、有効強度信号14、データインデックス信号15、データ集中度インデックス信号16、グループ化データインデックス信号17、有効距離信号18、有効AZ角度信号19、有効EL角度信号20、ターゲット距離信号21、ターゲットAZ角度信号22、ターゲットEL角度信号23、グループデータ個数信号24によって構成される。
【0019】
本発明の実施の形態に係る走査型測距測角センサ用データ処理装置は図1に示すように、2軸駆動型測距/測角センサ1により検出した受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13から、データ切り出し処理器2において、有効強度信号14、有効距離信号18、有効AZ角度信号19、有効EL角度信号20を生成した後、有効データ2値化処理器3で、有効強度信号14のみを用いて、走査順に検出した受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13が有効データかどうか判定し、その結果をデータインデックス信号15として出力する。
【0020】
次にデータ集中度判定処理器4では、入力されたデータインデックス信号15を2次元マトリックスデータとして展開しながら2次元平面上でのデータ集中度を判定し、その結果をデータ集中度インデックス信号16として生成後、データグルーピング処理器5において、入力されたデータ集中度インデックス信号16に基づくグループ化データインデックス信号17を発生する。
【0021】
さらにターゲット抽出/距離・角度生成器6において、データ切り出し処理器2で生成した有効強度信号14、有効距離信号18、有効AZ角度信号19、有効EL角度信号20と、データグルーピング処理器5で生成したグループ化データインデックス信号17とから、ターゲット距離信号21、ターゲットAZ角度信号22、ターゲットEL角度信号23、グループデータ個数信号24を生成した後、測距/測角データ格納メモリ7へ格納する。
【0022】
次に、図1に示す本実施形態の動作について、具体例として移動体である台車に2軸駆動型測距/測角センサ1を搭載し、地上に固定したターゲットに対する相対距離および相対姿勢角を計測する場合を説明する。
【0023】
まず2軸駆動型測距/測角センサ1では、移動体側からターゲット方向を走査することによりターゲットに対する受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13を検出する。ここで図2は、上側図がAZ角度計測信号12を水平軸、EL角度計測信号13を垂直軸に配した時の2次元走査軌跡図にターゲット検出部分を加えた図であり、下側図は受信強度信号10の変動図である。
【0024】
図2で示す結果は、2軸駆動型測距/測角センサ1の視野中心に直径4mradの円形ターゲットを置き、2軸駆動型測距/測角センサ1をAZ軸(水平軸)方向(水平方向)の左から右へ5回の往復運動と、EL軸(垂直軸)方向(垂直方向)の下から上への一方向走査とを同時に実施している。このときデータ切り出し処理器2では図2中で上側の走査軌跡図に示すように、この走査軌跡に沿って距離計測信号11、AZ角度計測信号12、EL角度計測信号13および受信強度信号10を計測し、図の両端に見られる走査折り返し部分など計測精度が極端に劣化する部分を除去することで、それぞれ有効距離信号18、有効AZ角度信号19、有効EL角度信号20および有効強度信号14を2次元インデックス付きデータとして発生する。
【0025】
一方、図2中の下側図は、横軸をAZ軸方向(水平方向)、縦軸を受信強度値とした時の受信強度信号10を示したものであり、ここからターゲット検出部分で受信強度値が増加しそれ以外の部分では受信強度値は「0」という値が生成されていることがわかる。データ切り出し処理器2が発生する有効強度信号14は、図2中の下側図に示す受信強度信号10のうち、図2中の上側図で見られるグラフ両端の走査折り返し部分など、計測精度が極端に劣化している部分を取り除いたものである。
【0026】
次に有効データ2値化処理器3では、データ切り出し処理器2により生成したインデックス付きの有効強度信号14(図2中の下側図参照)に対し、列インデックス順に検出した強度値およびその変動量と事前設定した閾値とを比較しながら、検出信号が有効なデータであるかどうかを判定し、有効データである場合は「1」、それ以外は「0」と有効強度信号14自体の値を置き換えることで、データインデックス信号15を発生する。
【0027】
図3は仮に想定した有効強度信号14と、この強度データに対し一例として2値化処理条件を閾値「10」、前値との差分「−10」と設定したとき、生成されるデータインデックス信号15との対応関係を示したものである。有効データ2値化処理器3は、入力された有効強度信号14を行ごとに列インデックス順に取り込んだ上で、列インデックス1が付与された各列の最初のデータに対しては設定した閾値「10」と検出値のみを比較し、検出値が閾値以上の場合は「1」、閾値未満の場合は「0」と設定する。
【0028】
さらに列インデックスが2以上の列データに対しては、評価対象となる検出値が設定した閾値以上かどうかに加え、列インデックスが1少ない隣り合う検出値との変動差が設定値(ここでは「−10」)以上の場合のみ「1」、それ以外の場合は「0」と設定する。図3右側に示すデータインデックス信号15は、この条件に従って左側に示す有効強度信号14から生成する2値化データの一例である。
【0029】
またデータ集中度判定処理器4では、行インデックスと列インデックスとからなる2次元インデックスを用いて、図4のように表されるデータインデックス信号15に対し、当該検出値D(n,n)=1と、その値を取り囲むように配置されたデータインデックスの異なる8個の検出値を合算した値が、データ集中度に関し設定した閾値(ここでは合算値は「5」であるため、閾値を「4」と設定すればID(n,n)=1となる)より大きな値であった場合に限りID(n,n)=1、それ以外はID(n,n)=0と設定し直したものを、データ集中度インデックス信号16として発生する。この処理をデータインデックス信号15に対し実施することで、誤検出などによるノイズデータの除去とデータ集中度の強調を同時に達成できる。
【0030】
さらにデータグルーピング処理器5では、データ集中度判定処理器4により生成されるデータ集中度インデックス信号16に対し、2次元インデックスのすべての行またはすべての列が「0」となっているインデックス値をすべて抽出した上で、インデックス「0」に囲まれたインデックス「1」のデータ群を1つのグループとして設定した後、その結果をグループ化データインデックス信号17として生成する。
【0031】
最後にターゲット抽出/距離・角度生成器6では、データ切り出し処理器2で生成した有効距離信号18、有効AZ角度信号19、有効EL角度信号20に対し、データグルーピング処理器5で発生するグループ化データインデックス信号17に基づいて、各データをそれぞれグループごとに平均化した後、その平均化信号をそれぞれ平均化計算で適用したデータ個数とともに、ターゲット距離信号21、ターゲットAZ角度信号22、ターゲットEL角度信号23、グループデータ個数信号24として生成し、これらの信号をすべて測距/測角データ格納メモリ7へ格納する。
【0032】
従って本発明では、2軸駆動型測距/測角センサ1で計測した受信強度信号10、距離計測信号11、AZ角度計測信号12、EL角度計測信号13に対し、検出信号をそのまま直接処理するのではなく、受信強度信号10のみを用いてデータのフィルタリングや集中度およびグルーピングインデックスを導出し、この結果からターゲット距離信号21、ターゲットAZ角度信号22、ターゲットEL角度信号23、グループデータ個数信号24を生成する構成となる。
【0033】
以上、説明したように本実施形態によれば、特に煩雑な処理を必要とする検出データに対するフィルタリングや集中度判定およびグルーピングを、受信強度信号10から得られる2次元の整数行列に対する条件分岐処理のみで実施しているため、宇宙機や飛翔体、航空機や車両など移動体に搭載可能な処理能力に制約のある場合でも、高精度なターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とを、リアルタイムに発生することが可能となる。
【0034】
特に、ここで示した有効データ2値化処理器3とデータ集中度判定処理器4との組み合わせ構成による、2値化データに対するフィルタリング処理とデータ集中度判定は、処理負荷の低減と生成データの高精度化を同時に実現するために工夫した独自技術であり、特開2004−128839号公報記載の発明など、従来技術の組み合わせにより容易に類推できるものではない。
【0035】
以上、この発明の実施形態を図面により詳述してきたが、具体的な構成は上記の実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計の変更等があってもこの発明に含まれる。例えば、2軸走査駆動によりラインデータとして取得される種々の2次元化可能なターゲットデータに対しても適用することができる。
【産業上の利用可能性】
【0036】
本発明の走査型測距測角センサ用データ処理装置は、処理能力に制約のある移動体搭載状態で、移動体自体の運動や移動体上において被る外的要因により生じる動揺に関わらず、ターゲットとして対象物上に設置された反射体を用いて、移動体と対象物との間で相対距離と相対姿勢とのデータを取得することが必要な各種の場合に、利用することが可能である。
【図面の簡単な説明】
【0037】
【図1】本発明の一実施形態を示すブロック図である。
【図2】同実施形態において、2軸駆動型測距/測角センサ1によって計測されるデータの一例を示すグラフである。
【図3】同実施形態における有効データ2値化処理器3に対する、入力信号である有効強度データ14と、出力信号であるデータインデックス信号15との関係の一例を示す図である。
【図4】同実施形態におけるデータ集中度判定処理器4の動作を説明するための、データインデックス信号15の一例を示す図である。
【図5】従来方式の一例を示すブロック図である。
【符号の説明】
【0038】
1 2軸駆動型測距/測角センサ
2 データ切り出し処理器(データ切り出し処理手段)
3 有効データ2値化処理器(有効データ2値化処理手段)
4 データ集中度判定処理器(データ集中度判定処理手段)
5 データグルーピング処理器(データグルーピング処理手段)
6 ターゲット抽出/距離・角度生成器(ターゲット抽出/距離・角度生成手段)
7 測距/測角データ格納メモリ
10 受信強度信号
11 距離計測信号
12 AZ角度計測信号
13 EL角度計測信号
14 有効強度信号
15 データインデックス信号
16 データ集中度インデックス信号
17 グループ化データインデックス信号
18 有効距離信号
19 有効AZ角度信号
20 有効EL角度信号
21 ターゲット距離信号
22 ターゲットAZ角度信号
23 ターゲットEL角度信号
24 グループデータ個数信号
101 測距・測角データ検出器
102 計測データフィルタ処理器
103 測距・測角データ生成器
104 測距・測角検出信号
105 測距・測角フィルタ処理信号
【特許請求の範囲】
【請求項1】
飛翔体や宇宙機や航空機や車両など移動体に搭載しターゲットとして対象物上に設置した反射体と前記移動体との相対距離と相対姿勢角とを計測する走査型測距測角センサ用データ処理装置であって、
前記移動体に搭載し前記移動体と前記反射体を搭載した前記対象物との間の相対距離と相対姿勢角と受信強度信号とを検出するための2軸駆動型測距/測角センサと、
前記2軸駆動型測距/測角センサが検出した前記相対距離と前記相対姿勢角と前記受信強度信号とから精度が保証できる有効相対距離と有効相対姿勢角と有効強度信号とを抽出するためのデータ切り出し処理手段と、
前記データ切り出し処理手段が生成する前記有効強度信号の値に応じて2値化処理しデータインデックス信号を発生するための有効データ2値化処理手段と、
2値化データである前記データインデックス信号から前記2軸駆動型測距/測角センサにより検出したデータの集中度を判定しデータ集中度インデックス信号を生成するデータ集中度判定処理手段と、
前記データ集中度インデックス信号から前記2軸駆動型測距/測角センサにより検出したデータのグループ分けのためのグループ化データインデックス信号を生成するためのデータグルーピング処理手段と、
前記有効強度信号と前記相対距離と前記相対姿勢角と前記グループ化データインデックス信号とからグループ毎に前記移動体と前記反射体間との前記相対距離と前記相対姿勢角とともに処理に適用したグループ毎のデータ個数を生成するターゲット抽出/距離・角度生成手段と、
前記ターゲット抽出/距離・角度生成手段が生成したデータを格納するための測距/測角データ格納メモリと、
を備えたことを特徴とする走査型測距測角センサ用データ処理装置。
【請求項2】
飛翔体や宇宙機や航空機や車両など移動体に搭載しターゲットとして対象物上に設置した反射体と前記移動体との相対距離と相対姿勢角とを計測する走査型測距測角センサ用データ処理装置であって、
前記移動体に搭載し前記移動体と前記反射体を搭載した前記対象物との間の相対距離と相対姿勢角と受信強度信号とを検出するための2軸駆動型測距/測角センサと、
前記2軸駆動型測距/測角センサが検出した前記相対距離と前記相対姿勢角と前記受信強度信号とから精度が保証できる有効相対距離と有効相対姿勢角と有効強度信号とを抽出するためのデータ切り出し処理手段と、
前記データ切り出し処理手段により生成した前記有効強度信号に対して、その強度値およびその変動量と予め設定された閾値とを比較して2値化処理を行ってデータインデックス信号を発生するための有効データ2値化処理手段と、
2値化データである前記データインデックス信号から前記2軸駆動型測距/測角センサにより検出したデータの集中度を判定しデータ集中度インデックス信号を生成するデータ集中度判定処理手段と、
前記データ集中度インデックス信号から前記2軸駆動型測距/測角センサにより検出したデータのグループ分けのためのグループ化データインデックス信号を生成するためのデータグルーピング処理手段と、
前記有効強度信号と前記相対距離と前記相対姿勢角と前記グループ化データインデックス信号とからグループ毎に前記移動体と前記反射体間との前記相対距離と前記相対姿勢角とともに処理に適用したグループ毎のデータ個数を生成するターゲット抽出/距離・角度生成手段と、
前記ターゲット抽出/距離・角度生成手段が生成したデータを格納するための測距/測角データ格納メモリと、
を備えたことを特徴とする走査型測距測角センサ用データ処理装置。
【請求項3】
前記データ集中度判定処理手段が、2値化した前記データインデックス信号に対し、行インデックスと列インデックスとからなる2次元インデックスに基づき前記データインデックス信号を取り囲むように2次元配置されたデータインデックスの異なる8個のデータインデックス信号と事前に設定した閾値との関係により前記データ集中度インデックス信号を発生することを特徴とする請求項1又は2記載の走査型測距測角センサ用データ処理装置。
【請求項4】
前記データグルーピング処理手段が、前記データ集中度判定処理手段により生成されるデータ集中度インデックス信号に対し、2次元インデックスのすべての行またはすべての列が「0」となっているインデックス値をすべて抽出した上でインデックス「0」に囲まれたインデックス「1」のデータ群を1つのグループとして設定した後、その結果をグループ化データインデックス信号として生成することを特徴とする請求項1又は2記載の走査型測距測角センサ用データ処理装置。
【請求項5】
前記ターゲット抽出/距離・角度生成手段が、前記データ切り出し処理手段で生成した有効距離信号,有効AZ角度信号および有効EL角度信号に対し、データグルーピング処理手段で発生するグループ化データインデックス信号に基づき各データをそれぞれグループごとに平均化した後、その平均化信号をそれぞれ平均化計算で適用したデータ個数とともに、ターゲット距離信号,ターゲットAZ角度信号,ターゲットEL角度信号およびグループデータ個数信号として生成して、これらの信号をすべて測距/測角データ格納メモリへ格納することを特徴とする請求項1又は2記載の走査型測距測角センサ用データ処理装置。
【請求項1】
飛翔体や宇宙機や航空機や車両など移動体に搭載しターゲットとして対象物上に設置した反射体と前記移動体との相対距離と相対姿勢角とを計測する走査型測距測角センサ用データ処理装置であって、
前記移動体に搭載し前記移動体と前記反射体を搭載した前記対象物との間の相対距離と相対姿勢角と受信強度信号とを検出するための2軸駆動型測距/測角センサと、
前記2軸駆動型測距/測角センサが検出した前記相対距離と前記相対姿勢角と前記受信強度信号とから精度が保証できる有効相対距離と有効相対姿勢角と有効強度信号とを抽出するためのデータ切り出し処理手段と、
前記データ切り出し処理手段が生成する前記有効強度信号の値に応じて2値化処理しデータインデックス信号を発生するための有効データ2値化処理手段と、
2値化データである前記データインデックス信号から前記2軸駆動型測距/測角センサにより検出したデータの集中度を判定しデータ集中度インデックス信号を生成するデータ集中度判定処理手段と、
前記データ集中度インデックス信号から前記2軸駆動型測距/測角センサにより検出したデータのグループ分けのためのグループ化データインデックス信号を生成するためのデータグルーピング処理手段と、
前記有効強度信号と前記相対距離と前記相対姿勢角と前記グループ化データインデックス信号とからグループ毎に前記移動体と前記反射体間との前記相対距離と前記相対姿勢角とともに処理に適用したグループ毎のデータ個数を生成するターゲット抽出/距離・角度生成手段と、
前記ターゲット抽出/距離・角度生成手段が生成したデータを格納するための測距/測角データ格納メモリと、
を備えたことを特徴とする走査型測距測角センサ用データ処理装置。
【請求項2】
飛翔体や宇宙機や航空機や車両など移動体に搭載しターゲットとして対象物上に設置した反射体と前記移動体との相対距離と相対姿勢角とを計測する走査型測距測角センサ用データ処理装置であって、
前記移動体に搭載し前記移動体と前記反射体を搭載した前記対象物との間の相対距離と相対姿勢角と受信強度信号とを検出するための2軸駆動型測距/測角センサと、
前記2軸駆動型測距/測角センサが検出した前記相対距離と前記相対姿勢角と前記受信強度信号とから精度が保証できる有効相対距離と有効相対姿勢角と有効強度信号とを抽出するためのデータ切り出し処理手段と、
前記データ切り出し処理手段により生成した前記有効強度信号に対して、その強度値およびその変動量と予め設定された閾値とを比較して2値化処理を行ってデータインデックス信号を発生するための有効データ2値化処理手段と、
2値化データである前記データインデックス信号から前記2軸駆動型測距/測角センサにより検出したデータの集中度を判定しデータ集中度インデックス信号を生成するデータ集中度判定処理手段と、
前記データ集中度インデックス信号から前記2軸駆動型測距/測角センサにより検出したデータのグループ分けのためのグループ化データインデックス信号を生成するためのデータグルーピング処理手段と、
前記有効強度信号と前記相対距離と前記相対姿勢角と前記グループ化データインデックス信号とからグループ毎に前記移動体と前記反射体間との前記相対距離と前記相対姿勢角とともに処理に適用したグループ毎のデータ個数を生成するターゲット抽出/距離・角度生成手段と、
前記ターゲット抽出/距離・角度生成手段が生成したデータを格納するための測距/測角データ格納メモリと、
を備えたことを特徴とする走査型測距測角センサ用データ処理装置。
【請求項3】
前記データ集中度判定処理手段が、2値化した前記データインデックス信号に対し、行インデックスと列インデックスとからなる2次元インデックスに基づき前記データインデックス信号を取り囲むように2次元配置されたデータインデックスの異なる8個のデータインデックス信号と事前に設定した閾値との関係により前記データ集中度インデックス信号を発生することを特徴とする請求項1又は2記載の走査型測距測角センサ用データ処理装置。
【請求項4】
前記データグルーピング処理手段が、前記データ集中度判定処理手段により生成されるデータ集中度インデックス信号に対し、2次元インデックスのすべての行またはすべての列が「0」となっているインデックス値をすべて抽出した上でインデックス「0」に囲まれたインデックス「1」のデータ群を1つのグループとして設定した後、その結果をグループ化データインデックス信号として生成することを特徴とする請求項1又は2記載の走査型測距測角センサ用データ処理装置。
【請求項5】
前記ターゲット抽出/距離・角度生成手段が、前記データ切り出し処理手段で生成した有効距離信号,有効AZ角度信号および有効EL角度信号に対し、データグルーピング処理手段で発生するグループ化データインデックス信号に基づき各データをそれぞれグループごとに平均化した後、その平均化信号をそれぞれ平均化計算で適用したデータ個数とともに、ターゲット距離信号,ターゲットAZ角度信号,ターゲットEL角度信号およびグループデータ個数信号として生成して、これらの信号をすべて測距/測角データ格納メモリへ格納することを特徴とする請求項1又は2記載の走査型測距測角センサ用データ処理装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−216526(P2009−216526A)
【公開日】平成21年9月24日(2009.9.24)
【国際特許分類】
【出願番号】特願2008−60349(P2008−60349)
【出願日】平成20年3月10日(2008.3.10)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成21年9月24日(2009.9.24)
【国際特許分類】
【出願日】平成20年3月10日(2008.3.10)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]