
走査型白色干渉計のデータ処理方法
【課題】走査型白色干渉計を用いて試料の表面形状を測定する際に、少ないデータ数で精度よく試料の表面形状を測定できるようにするデータ処理方法を提供する。
【解決手段】走査型白色干渉計のデータ処理方法は、干渉計で得た動画ファイルデータを読み出し、それぞれの画素において時間軸方向のデータに基き、ヒルベルト変換を用いて、時間軸上での位置で、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置を求め、それを全画素で表わす。
【解決手段】走査型白色干渉計のデータ処理方法は、干渉計で得た動画ファイルデータを読み出し、それぞれの画素において時間軸方向のデータに基き、ヒルベルト変換を用いて、時間軸上での位置で、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置を求め、それを全画素で表わす。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走査型白色干渉計による試料の表面形状の測定時間を短縮し、測定精度を向上するためのデータ処理方法に関するものである。
【0002】
本明細書において、用語“試料の表面形状”は試料の段差、膜厚、表面粗さの概念を包含して意味するものとする。
【背景技術】
【0003】
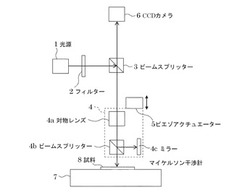
知られているように、走査型白色干渉計は、可干渉性の少ない白色光を光源として用い、マイケルソン型や、ミラウ型などの等光路干渉計を利用して試料の表面形状を非接触三次元測定できる装置であり、ウエハなどの表面形状の測定に用いられ得る。走査型白色干渉計の原理を添付図面の図1に示し、1は光源であり、高輝度白色光源から成っている。2は光源1からの白色光に対するフィルターであり、3はビームスプリッター、4はマイケルソン型干渉計である。マイケルソン型干渉計4は対物レンズ4aとビームスプリッター4bとミラー4cを備えている。マイケルソン型干渉計4には、マイケルソン型干渉計4を垂直走査するピエゾアクチュエーター5が設けられている。また図1において6は受光素子を成すCCDカメラ、7は試料8を支持する試料ホルダーである。
【0004】
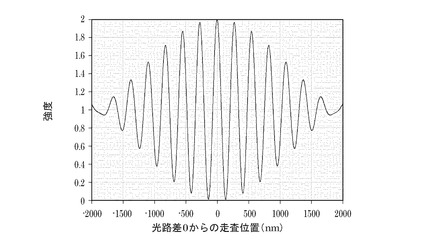
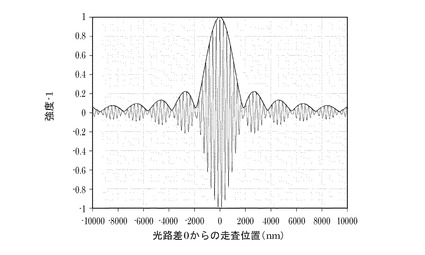
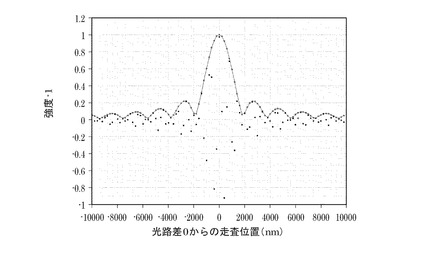
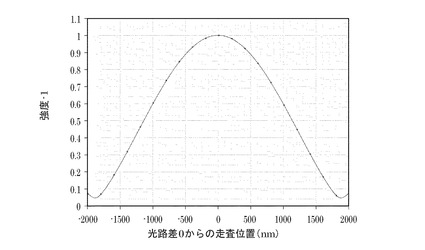
この種の走査型白色干渉計では、試料8までの距離を走査して、干渉波形をCCDカメラ6で記録する。ピエゾアクチュエーター5を作動して一定の速度で走査し、例えば30フレーム/秒の動画として撮影され、各画素での一定時間ごと(一定の走査位置ごと)の光の強度データが収集される。フィルター2は光の波長の帯域を制限するものであり、それにより干渉波形が変る。干渉波形の例を図2に示す。図2に示す干渉波形は計算で作成したもので、中心波長550nm、帯域幅80nmで強度分布は一様とした例である。横軸は「干渉計の光路差が0」からの走査位置で、275 nm周期となる。図3は図2の横軸の0付近を拡大したものである。「干渉計の光路差が0」で干渉波形が最大になる。
【0005】
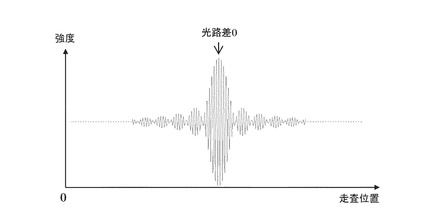
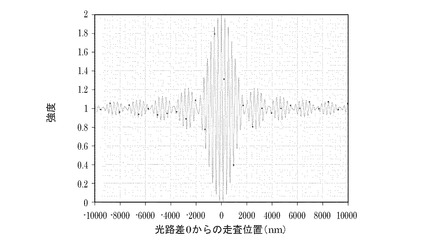
ピエゾアクチュエーター5の走査位置を横軸に取ると、ある画素でのデータは例えば図4のようになり、この干渉波形の最大ピークの位置を求める。それが「光路差0」の走査位置である。それを全画素で求めて表示すれば、試料の表面形状となる。
【0006】
しかし、実際の測定では、走査をしながらある一定の時間間隔でデータを取り、データ収集時間も短くしたいので、図2〜図4に示すような連続的なデータではなく、横軸の走査位置に関して離散的なデータとなる。走査速度を遅くすれば、データの走査位置間隔が狭くなりピーク位置算出の精度が上がるが、データ収集に時間がかかり、データ数も増すためデータ処理にも時間がかかるという問題がある。
【0007】
最大ピークの位置を算出する従来の方法として例えば、特許文献1の「発明の背景」に記載されたものや、非特許文献1に記載されたものを挙げることができる。干渉波形のAC成分を2乗し、低域通過フィルターに通して包絡線を求め、そのピーク位置を検出する方法がある。また、AC成分を2乗し、得られた波形の重心を求める方法がある。他に、干渉波形にフーリエ変換を行い、周波数領域でデータ処理しピーク位置を求める方法(FDA法、Frequency Domain Analysis、特許文献1参照)や、波形復元法がある(非特許文献1参照)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第2679876号
【非特許文献】
【0009】
【非特許文献1】吉澤徹、「最新光三次元計測」、2006年、朝倉書店 第5章2 光干渉法、pp.66〜73
【非特許文献2】城戸健一、「ディジタルフーリエ解析(II) −上級編−」、2007年、日本音響学会編、コロナ社。第12章 ヒルベルト変換、pp.127〜156
【発明の概要】
【発明が解決しようとする課題】
【0010】
前述の低域通過フィルターに通して包絡線を求める方法では、精度よく包絡線を求めるためには、多くのデータを取る必要があり、1干渉縞当たり少なくとも2つのデータ(ナイキスト間隔)が必要であり、5個以上のデータを必要とする場合が多い(特許文献1参照)。そのためデータ収集に時間がかかり、データ数が多いためにデータ処理にも時間がかかる。
【0011】
そこで、本発明の目的は、走査型白色干渉計を用いて試料の表面形状を測定する際に、少ないデータ数で精度よく試料の表面形状を測定できるようにするデータ処理方法を提供することにある。
【課題を解決するための手段】
【0012】
上記の目的を達成するために、本発明によれば、対物レンズの下にビームスプリッター及びミラーを配し、試料表面を含めて、マイケルソン型などの干渉計を構成し、試料までの距離又はミラーまでの距離をピエゾアクチュエーターで走査し、それによりできる干渉波形をCCDカメラで撮影して動画ファイルデータとして記録し、試料の表面形状を測定する、走査型白色干渉計のデータ処理方法において、
上記動画ファイルデータを読み出し、それぞれの画素において時間軸方向のデータに基き、ヒルベルト変換を用いて、時間軸上での位置で、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置を求め、それを全画素で表わすことを特徴としている。
【0013】
本発明の好ましい実施形態では、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置は、高速ヒルベルト変換を用いて、干渉波形の包絡線を算出し、算出した包絡線上の離散的なデータを2次多項式、又は4次多項式、又はsin(x)/xの関数形(ここでxは光路差0の位置からの走査距離に比例する量)などで、最小2乗法等でフィッティングさせて算出され得る。
【0014】
収集するデータの間隔は、ナイキスト間隔(干渉波形の周期の半分)より大きくできる。この場合でも高速ヒルベルト変換により、包絡線上の値を算出でき、ピーク位置を求めることができる。収集するデータの数が少なくて済むので、データ収集時間を短縮できる。扱うデータ数も少なくなるので、データ処理時間が短縮できる。
【0015】
より高精度で試料表面の高さを求める必要がある場合には、収集するデータの間隔は、ナイキスト間隔より短くしてデータが取られる。この場合には、各画素での時間軸方向のデータについて、高速ヒルベルト変換を行い、それを用いて干渉波形の瞬時位相を算出する。干渉波形に現れる複数のピークは、それぞれの干渉縞に対応し、各ピークの位置で瞬時位相は0である。ここで時間方向すなわち走査位置方向に現れる周期的な光強度の増減は干渉縞と呼ばれる。算出される瞬時位相は時間方向に離散的なデータであるが、位相は時間に比例するので、線形のフィッティングで内掃し、位相が0の位置を求める。最も大きいピークにおいて、位相が0の位置を求めれば、それが「光路差が0の走査距離」に対応する。ヒルベルト変換で算出される位相を瞬時位相と記載するが、この瞬時位相は干渉波形の位相と同じである。上記の瞬時位相は、干渉波形を構成するそれぞれの干渉縞に対応して、−πからπまでの範囲で時間に比例して変化する。時間的に隣の干渉縞での瞬時位相に2πを加えれば、瞬時位相は時間に対して直線的につながる。これを最大ピークの付近の複数の干渉縞について行えば、それらの位相データも、「最大ピークの位置算出」に使用できることになる。この場合には、より多くのデータを用いるので、「最大ピーク位置算出」の誤差が小さくなる。
【0016】
単色光又は狭帯域の光を用いる位相シフト法では、干渉波形を位相が90度ずつずれた例えば4つの光強度データが取られ、計算により位相が算出されるが、さらに多くのデータを取り、ヒルベルト変換で位相を求め、上記と同様に時間的に隣り合う干渉縞との間で位相をつなげば、より多くの位相データが時間に対して直線的につながり、多くのデータから位相を算出できるので、位相算出の精度が向上する。また、この方法ではデータ収集の間隔は90度ずつで、なくても良いので、走査速度を厳密に調整する必要がなくなり、測定が簡便になる。位相シフト法では元々例えば4つしかデータを取らないので、データ収集やデータ処理の時間に問題はなく、データ数が例えば数倍に増えても収集時間や処理時間は問題にならない。
【発明の効果】
【0017】
本発明の方法によれば、走査型白色干渉計で測定した動画ファイルデータから干渉波形の包絡線を、ヒルベルト変換により求めているので、少ないデータ数でも精度よく包絡線のピークの位置を算出できる。そしてヒルベルト変換を用いることで、包絡線と瞬時位相の両方が簡単にすぐに算出できるので、データ処理が簡単になる。
【0018】
また、干渉縞1本当り例えば4つの割合でデータを収集する場合には、包絡線のピーク位置の算出に、ヒルベルト変換により算出した瞬時位相を用い、隣り合う干渉縞の間で瞬時位相を接続することにより、「複数の干渉縞」の瞬時位相が直線的に並び、多くのデータをピーク位置の算出に利用できるので、ピーク位置の算出の精度が向上する。
【0019】
また、干渉波形及び包絡線は、そのピークでの傾きは0であり、その付近ではあまり変化しないのに対して、干渉波形の瞬時位相は線形に変化し、かつ、1本の干渉縞当り2πと大きく変化するので、瞬時位相が0であるピーク位置の検出が高精度にできる。
【図面の簡単な説明】
【0020】
【図1】本発明を実施する際に使用され得る走査型白色干渉計の構成例を示す概略図。
【図2】白色干渉波形の例を示すグラフ。
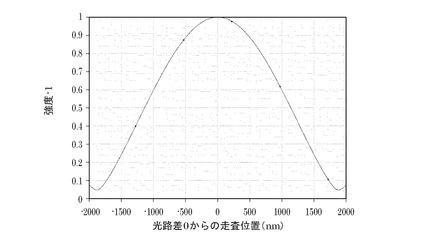
【図3】図2のグラフの中央付近の横軸を拡大して示すグラフ。
【図4】ある画素での、ピエゾアクチュエーターの走査位置と干渉波形の関係を示すグラフ。
【図5】1nmごとの干渉波形データ(細線)とそれから算出した包絡線データ(太線)を示すグラフ。
【図6】200nmごとの干渉波形データ(■)とそれから算出した包絡線データ(□)を示すグラフ。
【図7】図5の包絡線データ(線)と図6の包絡線データ(□)の比較を示すグラフ。
【図8】750nmごとの干渉波形データ(■)と1nmごとの干渉波形データ(細線)を示すグラフ。
【図9】図8の750nmごとの干渉波形データから算出した包絡線データ(■)と1nmごとの干渉波形データから算出した包絡線データ(線)を示すグラフ。
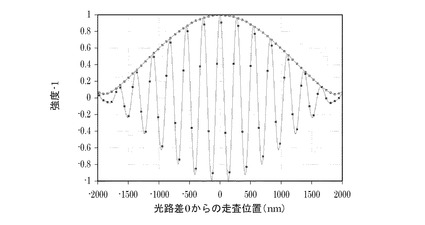
【図10】68.75nmごとの干渉波形データ(■)とそれから算出した包絡線データ(□)、及び1nmごとの干渉波形データ(線)とその包絡線(線)を示すグラフ。
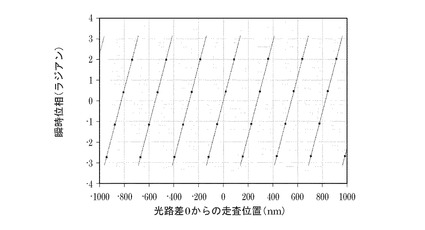
【図11】図10の68.75nmごとの干渉波形データから算出した瞬時位相(■)と1nmごとの干渉波形データから算出した瞬時位相(点線)を示すグラフ。
【発明を実施するための形態】
【0021】
図1に示すような落射照明式の正立金属顕微鏡と同様の構成をもつ走査型白色干渉計装置において、対物レンズ4aと試料8の間にマイケルソン型干渉計4を構成する。マイケルソン型干渉計の代わりにミラウ型のものでもよい。干渉計4の光路差をピエゾアクチュエーター5などにより変化させる。この場合、試料8までの距離を変えても、ミラー4cまでの距離を変えてもよい。
【0022】
試料に焦点が合った状態で、干渉縞の光強度が最大(光路差0)に成るようにミラー4cの位置を決めて固定しておいて、対物レンズ4a、ビームスプリッター4b及びミラー4cを一体として走査するのが、高低差が大きい試料面を測るには良い。その理由は、最大ピークを含む干渉波形のデータが、常に焦点が合った状態で取れるからである。
【0023】
このようにして走査をしながら、CCDカメラ6で30フレーム/秒程度で光の強度のデータが動画として収集され、保存される。この動画データは図示していないコンピュータ等でデータ解析され、各画素ごとに時間軸方向の配列データとして扱われ、それが干渉波形であり、その最大のピークの位置が光路差0の位置である。
【0024】
図示装置において、光源1は例えばハロゲンランプから成り、また帯域を制限するフィルター2は入れなくても数本の干渉縞は表れるが、しかしランプからの熱を遮るために赤外線を遮断するフィルターは設けられる。光源1から中心波長550nm、帯域幅80nmの白色光を通して使用した場合、図2に示すような干渉波形(計算で算出)になる。上記の帯域幅を狭くすれば、包絡線の幅が広がり干渉縞は多く表れる。例えば帯域幅10nmなら中央の大きい包絡線の中で数10本の干渉縞が見えることが実際に観察された。そのようなフィルターも多く市販されている。
このような狭帯域の光を用いれば、ある一つの走査位置で、試料面全体で干渉波形が表れている状態も可能であり、90度ずれた例えば4つだけのデータを取る位相シフト法が可能になる。しかし位相シフト法では、中心波長の1/4以上の段差(隣り合う画素での差)があると、位相の2πNの任意性のために、正しい表面の高さを算出できない。位相シフト法では単色光又は上記の狭帯域の光を用い、例えば90度ずつずれた4つのデータを取り、それから位相を求めるが、それよりも多いデータを取りヒルベルト変換で瞬時位相を求めて、時間軸方向に隣り合う干渉縞との間で位相接続(前述の2π分のシフト)すれば、時間−位相の関係において、4つよりも多くのデータが直線上に並ぶ。多くのデータを用いることで位相算出の精度が向上する。この場合は90度ごとに取る必要はない。
図3には図2の中央部分における横軸を拡大して干渉波形を示している。図4には、干渉波形と、ピエゾアクチュエーター5による走査位置との関係を示している。
【0025】
走査型白色干渉計で測定した動画ファイルデータからヒルベルト変換を用いて干渉波形の包絡線を求めることについて説明する。
関数x(t) に対するヒルベルト変換は次式で表わされる。
∞
x⊥(t)=1/π∫ x(τ)/(t−τ) dτ (1)
−∞
この式は、通信や音響などの分野において振幅変調(AM)や周波数変調(FM)に関連して用いられ、波形の位相を90度遅らせる変換であり、直交波形を生成し、それを用いて波形の包絡線や瞬時位相、瞬時周波数を算出できることが知られている(例えば非特許文献2参照)。時間に関して離散的な波形データについては、高速フーリエ変換の手法を用いて高速ヒルベルト変換がなされる。
【0026】
例えば、マイケルソン型干渉計を用いる白色干渉計では、「対物レンズ4aとその下のビームスプリッター4b」又はミラー4cを走査して収集した、時間(すなわち走査位置)的に離散的な光強度データの配列xを高速ヒルベルト変換して、位相を90度遅らせたデータ配列x⊥を生成し、それら配列の各要素iにおいて
ri=(xi2+x⊥i2)0.5 (2)
により包絡線上にあるデータの配列rが得られる。
【0027】
図5にその例を示す。図5は計算で生成した干渉波形を走査間隔1nmで収集した場合の波形データ(細線、平均値を引きAC成分を取り出している)と、その高速ヒルベルト変換を用いて求めた包絡線のデータ(太線)を示している。
【0028】
収集するデータの間隔はナイキスト間隔よりも広くできる。図6には、図5と同じ干渉波形を走査間隔200nmで収集した場合の波形データ(■)と、その高速ヒルベルト変換を用いて求めた包絡線データ(□)を示す。中心波長が550nmであるので、干渉縞の走査距離に関する周期は275nmであり、ナイキスト間隔は137.5nmである。従って、走査間隔200nmはナイキスト間隔の1.45倍である。測定の走査位置の1つが光路差0に一致することは通常はあり得ないので、測定位置を光路差0から適当にずらしたが、どのようにずらしても同様の包絡線が得られる。
【0029】
図7には、上記2つの包絡線の比較を示す。走査間隔1 nmの波形データから求めた包絡線データを線で示し、走査間隔200nmの波形データから求めた包絡線データを点(□)で示した。それらが高精度でよく一致することが分かる。
【0030】
白色光がその波長分布幅の中で強度分布が一定の場合(すなわちその幅の中では、強度が波長に依存せず一定の場合)には、干渉波形の包絡線は2次多項式、4次多項式やsin(x)/xの関数形(ここでxは光路差0からの走査距離に比例する量)でよくフィッティングできる。包絡線の上部の1割程度の高さ分は2次多項式でよくフィットでき、上から半分程度の高さ分は4次多項式でよくフィットでき、下から1割の高さ以上の部分はsin(x)/xの関数形でよくフィットできる。
白色光にその波長分布幅の中で強度分布がある場合には、あらかじめ狭い測定間隔で包絡線を測定してその関数形を求めておけばよい。
離散的な包絡線データをそれらの関数を用いて最小2乗法などでフィッティングさせれば、包絡線のピークの位置が精度よく求まる。
従って、収集するデータの間隔がナイキスト間隔よりも広くても高精度に包絡線とそのピークの位置を算出できる。
【0031】
図8には、走査間隔750nm(ナイキスト間隔の5.45倍)とさらに広くした波形データ(■)の例をしめし、図8における線は走査間隔1nmの波形データである。図9には、その走査間隔750nmの波形データから算出した包絡線データを点(■)で示し、図9における線は走査間隔1nmの波形データから求めた包絡線である。両者はよく一致しており、上述の関数形でフィッティングさせることにより、この場合でも精度よく包絡線を算出できることが分かる。
【0032】
なお、干渉波形をフーリエ変換し、周波数領域で解析して干渉波形の最大ピークの位置を算出する方法では、ナイキスト間隔の2.5倍(干渉縞1.25本に1回の割合でのデータ収集)の場合に、数十ナノメートルの範囲内で正確に求められるとしている(前述の特許文献1のp.13参照)。
【0033】
1干渉縞当たり例えば4つの割合(ナイキスト間隔の半分)でデータを収集して、ヒルベルト変換を用いて、高精度に干渉波形の最大ピークの位置を算出する方法について以下に説明する。
図10にはそのデータの例を示している。中心波長550nm、帯域幅80nmの白色光を使用した場合の計算で出した干渉波形であり、データ収集間隔はナイキスト間隔の半分の68.75nmである。光路差0とデータ収集位置は、一般には一致しないので、意図的にずらした。そのデータ収集位置は任意の位置で以下のことが成り立つ。■が68.75 nmごとに収集した干渉波形であり、□がそれをヒルベルト変換して算出した包絡線データである。図10中の線は、走査間隔1nmの波形データとその包絡線データである。
波形x(t) とそのヒルベルト変換x⊥(t) を用いると、波形x(t) の瞬時位相θ(t)は次式で表される(非特許文献2)。
θ(t)=tan−1{x⊥(t)/x(t)} (3)
上記のように包絡線は、各干渉縞波形のピーク近傍を接線として結び形成される。包絡線のピークの位置は、最大ピークを持つ干渉縞のピーク位置に一致する。まず上記の方法により包絡線のピーク位置を算出することにより、最大ピークを持つ干渉縞が特定される。次に、瞬時位相を用いて、その最大ピークの位置を高精度に求める。
【0034】
図10の干渉波形データの瞬時位相を図11に示す。1nmごとのデータから算出した位相を点線で示し、68.75nmごとのデータから算出した位相を■で示した。式(3)では位相の範囲は−π/2〜+π/2であるが、x⊥(t)とx(t)の符号を考慮に入れて、図11では−π〜+πの範囲に表わした。
干渉波形にある複数のピークのそれぞれの位置で位相は0である。最大ピークを持つ干渉縞において、瞬時位相の離散的なデータから内掃して位相が0となる位置を求めれば、それが「光路差0の位置」である。
瞬時位相は、隣り合う干渉縞との間で2πだけ値がずれている。図11において、その2πの整数倍だけ上または下にシフトさせてプロットすれば、複数の干渉縞を含む範囲で直線の関係が得られる。そうすると多くのデータを「位相が0となる位置の算出」のために使えるので、その算出の精度が増す。測定データは雑音を含むが、その影響は低減される。
なお、包絡線のピーク位置を求め、さらに1干渉縞当たり例えば4つの割合のデータから位相シフト法の手法でより精密に、最大の干渉縞波形のピーク位置を算出する方法がある(非特許文献1参照)。包絡線のピーク位置が数ナノメートルの精度で求められ、さらに位相シフト法の手法を用いることで約1ナノメートルの精度で試料表面の高さが求められるとしている。その位相シフト法とは、位相90度間隔で例えば4つの光強度のデータを取り、それらデータはa=A cosφ+B、b=A cos(φ+π/2)+B、c=A cos(φ+π)+B、d=A cos(φ+3π/2)+Bと書けるので、φ=tan−1{(b−d)/(c−a)}により位相が求められ、Nを整数として2πNのシフト分は未知であるが、隣り合う画素での位相差をπ以下にして位相を接続して、全画素で位相を得て、h=(λ/4π)φにより試料表面の高さhを得る。λは波長である。
【符号の説明】
【0035】
1:光源
2:フィルター
3:ビームスプリッター
4:マイケルソン型干渉計
4a:対物レンズ
4b:ビームスプリッター
4c:ミラー
5:ピエゾアクチュエーター
6:CCDカメラ
7:試料ホルダー
8:試料
【技術分野】
【0001】
本発明は、走査型白色干渉計による試料の表面形状の測定時間を短縮し、測定精度を向上するためのデータ処理方法に関するものである。
【0002】
本明細書において、用語“試料の表面形状”は試料の段差、膜厚、表面粗さの概念を包含して意味するものとする。
【背景技術】
【0003】
知られているように、走査型白色干渉計は、可干渉性の少ない白色光を光源として用い、マイケルソン型や、ミラウ型などの等光路干渉計を利用して試料の表面形状を非接触三次元測定できる装置であり、ウエハなどの表面形状の測定に用いられ得る。走査型白色干渉計の原理を添付図面の図1に示し、1は光源であり、高輝度白色光源から成っている。2は光源1からの白色光に対するフィルターであり、3はビームスプリッター、4はマイケルソン型干渉計である。マイケルソン型干渉計4は対物レンズ4aとビームスプリッター4bとミラー4cを備えている。マイケルソン型干渉計4には、マイケルソン型干渉計4を垂直走査するピエゾアクチュエーター5が設けられている。また図1において6は受光素子を成すCCDカメラ、7は試料8を支持する試料ホルダーである。
【0004】
この種の走査型白色干渉計では、試料8までの距離を走査して、干渉波形をCCDカメラ6で記録する。ピエゾアクチュエーター5を作動して一定の速度で走査し、例えば30フレーム/秒の動画として撮影され、各画素での一定時間ごと(一定の走査位置ごと)の光の強度データが収集される。フィルター2は光の波長の帯域を制限するものであり、それにより干渉波形が変る。干渉波形の例を図2に示す。図2に示す干渉波形は計算で作成したもので、中心波長550nm、帯域幅80nmで強度分布は一様とした例である。横軸は「干渉計の光路差が0」からの走査位置で、275 nm周期となる。図3は図2の横軸の0付近を拡大したものである。「干渉計の光路差が0」で干渉波形が最大になる。
【0005】
ピエゾアクチュエーター5の走査位置を横軸に取ると、ある画素でのデータは例えば図4のようになり、この干渉波形の最大ピークの位置を求める。それが「光路差0」の走査位置である。それを全画素で求めて表示すれば、試料の表面形状となる。
【0006】
しかし、実際の測定では、走査をしながらある一定の時間間隔でデータを取り、データ収集時間も短くしたいので、図2〜図4に示すような連続的なデータではなく、横軸の走査位置に関して離散的なデータとなる。走査速度を遅くすれば、データの走査位置間隔が狭くなりピーク位置算出の精度が上がるが、データ収集に時間がかかり、データ数も増すためデータ処理にも時間がかかるという問題がある。
【0007】
最大ピークの位置を算出する従来の方法として例えば、特許文献1の「発明の背景」に記載されたものや、非特許文献1に記載されたものを挙げることができる。干渉波形のAC成分を2乗し、低域通過フィルターに通して包絡線を求め、そのピーク位置を検出する方法がある。また、AC成分を2乗し、得られた波形の重心を求める方法がある。他に、干渉波形にフーリエ変換を行い、周波数領域でデータ処理しピーク位置を求める方法(FDA法、Frequency Domain Analysis、特許文献1参照)や、波形復元法がある(非特許文献1参照)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第2679876号
【非特許文献】
【0009】
【非特許文献1】吉澤徹、「最新光三次元計測」、2006年、朝倉書店 第5章2 光干渉法、pp.66〜73
【非特許文献2】城戸健一、「ディジタルフーリエ解析(II) −上級編−」、2007年、日本音響学会編、コロナ社。第12章 ヒルベルト変換、pp.127〜156
【発明の概要】
【発明が解決しようとする課題】
【0010】
前述の低域通過フィルターに通して包絡線を求める方法では、精度よく包絡線を求めるためには、多くのデータを取る必要があり、1干渉縞当たり少なくとも2つのデータ(ナイキスト間隔)が必要であり、5個以上のデータを必要とする場合が多い(特許文献1参照)。そのためデータ収集に時間がかかり、データ数が多いためにデータ処理にも時間がかかる。
【0011】
そこで、本発明の目的は、走査型白色干渉計を用いて試料の表面形状を測定する際に、少ないデータ数で精度よく試料の表面形状を測定できるようにするデータ処理方法を提供することにある。
【課題を解決するための手段】
【0012】
上記の目的を達成するために、本発明によれば、対物レンズの下にビームスプリッター及びミラーを配し、試料表面を含めて、マイケルソン型などの干渉計を構成し、試料までの距離又はミラーまでの距離をピエゾアクチュエーターで走査し、それによりできる干渉波形をCCDカメラで撮影して動画ファイルデータとして記録し、試料の表面形状を測定する、走査型白色干渉計のデータ処理方法において、
上記動画ファイルデータを読み出し、それぞれの画素において時間軸方向のデータに基き、ヒルベルト変換を用いて、時間軸上での位置で、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置を求め、それを全画素で表わすことを特徴としている。
【0013】
本発明の好ましい実施形態では、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置は、高速ヒルベルト変換を用いて、干渉波形の包絡線を算出し、算出した包絡線上の離散的なデータを2次多項式、又は4次多項式、又はsin(x)/xの関数形(ここでxは光路差0の位置からの走査距離に比例する量)などで、最小2乗法等でフィッティングさせて算出され得る。
【0014】
収集するデータの間隔は、ナイキスト間隔(干渉波形の周期の半分)より大きくできる。この場合でも高速ヒルベルト変換により、包絡線上の値を算出でき、ピーク位置を求めることができる。収集するデータの数が少なくて済むので、データ収集時間を短縮できる。扱うデータ数も少なくなるので、データ処理時間が短縮できる。
【0015】
より高精度で試料表面の高さを求める必要がある場合には、収集するデータの間隔は、ナイキスト間隔より短くしてデータが取られる。この場合には、各画素での時間軸方向のデータについて、高速ヒルベルト変換を行い、それを用いて干渉波形の瞬時位相を算出する。干渉波形に現れる複数のピークは、それぞれの干渉縞に対応し、各ピークの位置で瞬時位相は0である。ここで時間方向すなわち走査位置方向に現れる周期的な光強度の増減は干渉縞と呼ばれる。算出される瞬時位相は時間方向に離散的なデータであるが、位相は時間に比例するので、線形のフィッティングで内掃し、位相が0の位置を求める。最も大きいピークにおいて、位相が0の位置を求めれば、それが「光路差が0の走査距離」に対応する。ヒルベルト変換で算出される位相を瞬時位相と記載するが、この瞬時位相は干渉波形の位相と同じである。上記の瞬時位相は、干渉波形を構成するそれぞれの干渉縞に対応して、−πからπまでの範囲で時間に比例して変化する。時間的に隣の干渉縞での瞬時位相に2πを加えれば、瞬時位相は時間に対して直線的につながる。これを最大ピークの付近の複数の干渉縞について行えば、それらの位相データも、「最大ピークの位置算出」に使用できることになる。この場合には、より多くのデータを用いるので、「最大ピーク位置算出」の誤差が小さくなる。
【0016】
単色光又は狭帯域の光を用いる位相シフト法では、干渉波形を位相が90度ずつずれた例えば4つの光強度データが取られ、計算により位相が算出されるが、さらに多くのデータを取り、ヒルベルト変換で位相を求め、上記と同様に時間的に隣り合う干渉縞との間で位相をつなげば、より多くの位相データが時間に対して直線的につながり、多くのデータから位相を算出できるので、位相算出の精度が向上する。また、この方法ではデータ収集の間隔は90度ずつで、なくても良いので、走査速度を厳密に調整する必要がなくなり、測定が簡便になる。位相シフト法では元々例えば4つしかデータを取らないので、データ収集やデータ処理の時間に問題はなく、データ数が例えば数倍に増えても収集時間や処理時間は問題にならない。
【発明の効果】
【0017】
本発明の方法によれば、走査型白色干渉計で測定した動画ファイルデータから干渉波形の包絡線を、ヒルベルト変換により求めているので、少ないデータ数でも精度よく包絡線のピークの位置を算出できる。そしてヒルベルト変換を用いることで、包絡線と瞬時位相の両方が簡単にすぐに算出できるので、データ処理が簡単になる。
【0018】
また、干渉縞1本当り例えば4つの割合でデータを収集する場合には、包絡線のピーク位置の算出に、ヒルベルト変換により算出した瞬時位相を用い、隣り合う干渉縞の間で瞬時位相を接続することにより、「複数の干渉縞」の瞬時位相が直線的に並び、多くのデータをピーク位置の算出に利用できるので、ピーク位置の算出の精度が向上する。
【0019】
また、干渉波形及び包絡線は、そのピークでの傾きは0であり、その付近ではあまり変化しないのに対して、干渉波形の瞬時位相は線形に変化し、かつ、1本の干渉縞当り2πと大きく変化するので、瞬時位相が0であるピーク位置の検出が高精度にできる。
【図面の簡単な説明】
【0020】
【図1】本発明を実施する際に使用され得る走査型白色干渉計の構成例を示す概略図。
【図2】白色干渉波形の例を示すグラフ。
【図3】図2のグラフの中央付近の横軸を拡大して示すグラフ。
【図4】ある画素での、ピエゾアクチュエーターの走査位置と干渉波形の関係を示すグラフ。
【図5】1nmごとの干渉波形データ(細線)とそれから算出した包絡線データ(太線)を示すグラフ。
【図6】200nmごとの干渉波形データ(■)とそれから算出した包絡線データ(□)を示すグラフ。
【図7】図5の包絡線データ(線)と図6の包絡線データ(□)の比較を示すグラフ。
【図8】750nmごとの干渉波形データ(■)と1nmごとの干渉波形データ(細線)を示すグラフ。
【図9】図8の750nmごとの干渉波形データから算出した包絡線データ(■)と1nmごとの干渉波形データから算出した包絡線データ(線)を示すグラフ。
【図10】68.75nmごとの干渉波形データ(■)とそれから算出した包絡線データ(□)、及び1nmごとの干渉波形データ(線)とその包絡線(線)を示すグラフ。
【図11】図10の68.75nmごとの干渉波形データから算出した瞬時位相(■)と1nmごとの干渉波形データから算出した瞬時位相(点線)を示すグラフ。
【発明を実施するための形態】
【0021】
図1に示すような落射照明式の正立金属顕微鏡と同様の構成をもつ走査型白色干渉計装置において、対物レンズ4aと試料8の間にマイケルソン型干渉計4を構成する。マイケルソン型干渉計の代わりにミラウ型のものでもよい。干渉計4の光路差をピエゾアクチュエーター5などにより変化させる。この場合、試料8までの距離を変えても、ミラー4cまでの距離を変えてもよい。
【0022】
試料に焦点が合った状態で、干渉縞の光強度が最大(光路差0)に成るようにミラー4cの位置を決めて固定しておいて、対物レンズ4a、ビームスプリッター4b及びミラー4cを一体として走査するのが、高低差が大きい試料面を測るには良い。その理由は、最大ピークを含む干渉波形のデータが、常に焦点が合った状態で取れるからである。
【0023】
このようにして走査をしながら、CCDカメラ6で30フレーム/秒程度で光の強度のデータが動画として収集され、保存される。この動画データは図示していないコンピュータ等でデータ解析され、各画素ごとに時間軸方向の配列データとして扱われ、それが干渉波形であり、その最大のピークの位置が光路差0の位置である。
【0024】
図示装置において、光源1は例えばハロゲンランプから成り、また帯域を制限するフィルター2は入れなくても数本の干渉縞は表れるが、しかしランプからの熱を遮るために赤外線を遮断するフィルターは設けられる。光源1から中心波長550nm、帯域幅80nmの白色光を通して使用した場合、図2に示すような干渉波形(計算で算出)になる。上記の帯域幅を狭くすれば、包絡線の幅が広がり干渉縞は多く表れる。例えば帯域幅10nmなら中央の大きい包絡線の中で数10本の干渉縞が見えることが実際に観察された。そのようなフィルターも多く市販されている。
このような狭帯域の光を用いれば、ある一つの走査位置で、試料面全体で干渉波形が表れている状態も可能であり、90度ずれた例えば4つだけのデータを取る位相シフト法が可能になる。しかし位相シフト法では、中心波長の1/4以上の段差(隣り合う画素での差)があると、位相の2πNの任意性のために、正しい表面の高さを算出できない。位相シフト法では単色光又は上記の狭帯域の光を用い、例えば90度ずつずれた4つのデータを取り、それから位相を求めるが、それよりも多いデータを取りヒルベルト変換で瞬時位相を求めて、時間軸方向に隣り合う干渉縞との間で位相接続(前述の2π分のシフト)すれば、時間−位相の関係において、4つよりも多くのデータが直線上に並ぶ。多くのデータを用いることで位相算出の精度が向上する。この場合は90度ごとに取る必要はない。
図3には図2の中央部分における横軸を拡大して干渉波形を示している。図4には、干渉波形と、ピエゾアクチュエーター5による走査位置との関係を示している。
【0025】
走査型白色干渉計で測定した動画ファイルデータからヒルベルト変換を用いて干渉波形の包絡線を求めることについて説明する。
関数x(t) に対するヒルベルト変換は次式で表わされる。
∞
x⊥(t)=1/π∫ x(τ)/(t−τ) dτ (1)
−∞
この式は、通信や音響などの分野において振幅変調(AM)や周波数変調(FM)に関連して用いられ、波形の位相を90度遅らせる変換であり、直交波形を生成し、それを用いて波形の包絡線や瞬時位相、瞬時周波数を算出できることが知られている(例えば非特許文献2参照)。時間に関して離散的な波形データについては、高速フーリエ変換の手法を用いて高速ヒルベルト変換がなされる。
【0026】
例えば、マイケルソン型干渉計を用いる白色干渉計では、「対物レンズ4aとその下のビームスプリッター4b」又はミラー4cを走査して収集した、時間(すなわち走査位置)的に離散的な光強度データの配列xを高速ヒルベルト変換して、位相を90度遅らせたデータ配列x⊥を生成し、それら配列の各要素iにおいて
ri=(xi2+x⊥i2)0.5 (2)
により包絡線上にあるデータの配列rが得られる。
【0027】
図5にその例を示す。図5は計算で生成した干渉波形を走査間隔1nmで収集した場合の波形データ(細線、平均値を引きAC成分を取り出している)と、その高速ヒルベルト変換を用いて求めた包絡線のデータ(太線)を示している。
【0028】
収集するデータの間隔はナイキスト間隔よりも広くできる。図6には、図5と同じ干渉波形を走査間隔200nmで収集した場合の波形データ(■)と、その高速ヒルベルト変換を用いて求めた包絡線データ(□)を示す。中心波長が550nmであるので、干渉縞の走査距離に関する周期は275nmであり、ナイキスト間隔は137.5nmである。従って、走査間隔200nmはナイキスト間隔の1.45倍である。測定の走査位置の1つが光路差0に一致することは通常はあり得ないので、測定位置を光路差0から適当にずらしたが、どのようにずらしても同様の包絡線が得られる。
【0029】
図7には、上記2つの包絡線の比較を示す。走査間隔1 nmの波形データから求めた包絡線データを線で示し、走査間隔200nmの波形データから求めた包絡線データを点(□)で示した。それらが高精度でよく一致することが分かる。
【0030】
白色光がその波長分布幅の中で強度分布が一定の場合(すなわちその幅の中では、強度が波長に依存せず一定の場合)には、干渉波形の包絡線は2次多項式、4次多項式やsin(x)/xの関数形(ここでxは光路差0からの走査距離に比例する量)でよくフィッティングできる。包絡線の上部の1割程度の高さ分は2次多項式でよくフィットでき、上から半分程度の高さ分は4次多項式でよくフィットでき、下から1割の高さ以上の部分はsin(x)/xの関数形でよくフィットできる。
白色光にその波長分布幅の中で強度分布がある場合には、あらかじめ狭い測定間隔で包絡線を測定してその関数形を求めておけばよい。
離散的な包絡線データをそれらの関数を用いて最小2乗法などでフィッティングさせれば、包絡線のピークの位置が精度よく求まる。
従って、収集するデータの間隔がナイキスト間隔よりも広くても高精度に包絡線とそのピークの位置を算出できる。
【0031】
図8には、走査間隔750nm(ナイキスト間隔の5.45倍)とさらに広くした波形データ(■)の例をしめし、図8における線は走査間隔1nmの波形データである。図9には、その走査間隔750nmの波形データから算出した包絡線データを点(■)で示し、図9における線は走査間隔1nmの波形データから求めた包絡線である。両者はよく一致しており、上述の関数形でフィッティングさせることにより、この場合でも精度よく包絡線を算出できることが分かる。
【0032】
なお、干渉波形をフーリエ変換し、周波数領域で解析して干渉波形の最大ピークの位置を算出する方法では、ナイキスト間隔の2.5倍(干渉縞1.25本に1回の割合でのデータ収集)の場合に、数十ナノメートルの範囲内で正確に求められるとしている(前述の特許文献1のp.13参照)。
【0033】
1干渉縞当たり例えば4つの割合(ナイキスト間隔の半分)でデータを収集して、ヒルベルト変換を用いて、高精度に干渉波形の最大ピークの位置を算出する方法について以下に説明する。
図10にはそのデータの例を示している。中心波長550nm、帯域幅80nmの白色光を使用した場合の計算で出した干渉波形であり、データ収集間隔はナイキスト間隔の半分の68.75nmである。光路差0とデータ収集位置は、一般には一致しないので、意図的にずらした。そのデータ収集位置は任意の位置で以下のことが成り立つ。■が68.75 nmごとに収集した干渉波形であり、□がそれをヒルベルト変換して算出した包絡線データである。図10中の線は、走査間隔1nmの波形データとその包絡線データである。
波形x(t) とそのヒルベルト変換x⊥(t) を用いると、波形x(t) の瞬時位相θ(t)は次式で表される(非特許文献2)。
θ(t)=tan−1{x⊥(t)/x(t)} (3)
上記のように包絡線は、各干渉縞波形のピーク近傍を接線として結び形成される。包絡線のピークの位置は、最大ピークを持つ干渉縞のピーク位置に一致する。まず上記の方法により包絡線のピーク位置を算出することにより、最大ピークを持つ干渉縞が特定される。次に、瞬時位相を用いて、その最大ピークの位置を高精度に求める。
【0034】
図10の干渉波形データの瞬時位相を図11に示す。1nmごとのデータから算出した位相を点線で示し、68.75nmごとのデータから算出した位相を■で示した。式(3)では位相の範囲は−π/2〜+π/2であるが、x⊥(t)とx(t)の符号を考慮に入れて、図11では−π〜+πの範囲に表わした。
干渉波形にある複数のピークのそれぞれの位置で位相は0である。最大ピークを持つ干渉縞において、瞬時位相の離散的なデータから内掃して位相が0となる位置を求めれば、それが「光路差0の位置」である。
瞬時位相は、隣り合う干渉縞との間で2πだけ値がずれている。図11において、その2πの整数倍だけ上または下にシフトさせてプロットすれば、複数の干渉縞を含む範囲で直線の関係が得られる。そうすると多くのデータを「位相が0となる位置の算出」のために使えるので、その算出の精度が増す。測定データは雑音を含むが、その影響は低減される。
なお、包絡線のピーク位置を求め、さらに1干渉縞当たり例えば4つの割合のデータから位相シフト法の手法でより精密に、最大の干渉縞波形のピーク位置を算出する方法がある(非特許文献1参照)。包絡線のピーク位置が数ナノメートルの精度で求められ、さらに位相シフト法の手法を用いることで約1ナノメートルの精度で試料表面の高さが求められるとしている。その位相シフト法とは、位相90度間隔で例えば4つの光強度のデータを取り、それらデータはa=A cosφ+B、b=A cos(φ+π/2)+B、c=A cos(φ+π)+B、d=A cos(φ+3π/2)+Bと書けるので、φ=tan−1{(b−d)/(c−a)}により位相が求められ、Nを整数として2πNのシフト分は未知であるが、隣り合う画素での位相差をπ以下にして位相を接続して、全画素で位相を得て、h=(λ/4π)φにより試料表面の高さhを得る。λは波長である。
【符号の説明】
【0035】
1:光源
2:フィルター
3:ビームスプリッター
4:マイケルソン型干渉計
4a:対物レンズ
4b:ビームスプリッター
4c:ミラー
5:ピエゾアクチュエーター
6:CCDカメラ
7:試料ホルダー
8:試料
【特許請求の範囲】
【請求項1】
対物レンズの下にビームスプリッター及びミラーを配し、試料表面を含めて、マイケルソン型などの干渉計を構成し、試料までの距離又はミラーまでの距離をピエゾアクチュエーターで走査し、それによりできる干渉波形をCCDカメラで撮影して動画ファイルデータとして記録し、試料の表面形状を測定する、走査型白色干渉計のデータ処理方法において、
上記動画ファイルデータを読み出し、それぞれの画素において時間軸方向のデータに基き、ヒルベルト変換を用いて、時間軸上での位置で、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置を求め、それを全画素で表わすこと
を特徴とする走査型白色干渉計のデータ処理方法。
【請求項2】
干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置は、高速ヒルベルト変換を用いて、干渉波形の包絡線を算出し、算出した包絡線上の離散的なデータを2次多項式、又は4次多項式、又はsin(x)/xの関数形(ここでxは光路差0の位置からの走査距離に比例する量)などで、最小2乗法等でフィッティングさせて算出されることを特徴とする請求項1記載の走査型白色干渉計のデータ処理方法。
【請求項3】
収集するデータの間隔が、ナイキスト間隔すなわち干渉波形の周期の半分より大きいことを特徴とする請求項1記載の走査型白色干渉計のデータ処理方法。
【請求項4】
収集するデータの間隔が、ナイキスト間隔すなわち干渉波形の周期の半分より短いいことを特徴とする請求項1記載の走査型白色干渉計のデータ処理方法。
【請求項5】
各画素での時間軸方向のデータについて、高速ヒルベルト変換を行い、それを用いて干渉波形の瞬時位相を算出し、干渉波形に複数存在するピークの位置で、その瞬時位相が0であり、それらピークのうちで、高さが最大のピークの位置が光路差0に対応し、その光路差0の位置を、瞬時位相が0になる位置から算出することを特徴とする請求項4記載の走査型白色干渉計のデータ処理方法。
【請求項1】
対物レンズの下にビームスプリッター及びミラーを配し、試料表面を含めて、マイケルソン型などの干渉計を構成し、試料までの距離又はミラーまでの距離をピエゾアクチュエーターで走査し、それによりできる干渉波形をCCDカメラで撮影して動画ファイルデータとして記録し、試料の表面形状を測定する、走査型白色干渉計のデータ処理方法において、
上記動画ファイルデータを読み出し、それぞれの画素において時間軸方向のデータに基き、ヒルベルト変換を用いて、時間軸上での位置で、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置を求め、それを全画素で表わすこと
を特徴とする走査型白色干渉計のデータ処理方法。
【請求項2】
干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置は、高速ヒルベルト変換を用いて、干渉波形の包絡線を算出し、算出した包絡線上の離散的なデータを2次多項式、又は4次多項式、又はsin(x)/xの関数形(ここでxは光路差0の位置からの走査距離に比例する量)などで、最小2乗法等でフィッティングさせて算出されることを特徴とする請求項1記載の走査型白色干渉計のデータ処理方法。
【請求項3】
収集するデータの間隔が、ナイキスト間隔すなわち干渉波形の周期の半分より大きいことを特徴とする請求項1記載の走査型白色干渉計のデータ処理方法。
【請求項4】
収集するデータの間隔が、ナイキスト間隔すなわち干渉波形の周期の半分より短いいことを特徴とする請求項1記載の走査型白色干渉計のデータ処理方法。
【請求項5】
各画素での時間軸方向のデータについて、高速ヒルベルト変換を行い、それを用いて干渉波形の瞬時位相を算出し、干渉波形に複数存在するピークの位置で、その瞬時位相が0であり、それらピークのうちで、高さが最大のピークの位置が光路差0に対応し、その光路差0の位置を、瞬時位相が0になる位置から算出することを特徴とする請求項4記載の走査型白色干渉計のデータ処理方法。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−19752(P2013−19752A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−152999(P2011−152999)
【出願日】平成23年7月11日(2011.7.11)
【出願人】(000231464)株式会社アルバック (1,740)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月11日(2011.7.11)
【出願人】(000231464)株式会社アルバック (1,740)
【Fターム(参考)】
[ Back to top ]