
走査型近視野超音波ホログラフィー
空間分解能位相検出技術は、試料表面全体の弾性的および粘弾性的な変動を画像化するため走査型近視野超音波ホログラフィー(47)を使用する。走査型近視野超音波ホログラフィー(47)は、試料表面(12)の超音波振動の時間分解された変化を測定する近視野法を用いる。このようにして、これまで必要とされた遠視野音響レンズを不要にし、従来の位相分解された音響顕微鏡法(すなわちホログラフィー)の空間分解能の限界を克服する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、高い空間分解能を有する位相敏感な技法に関するもので、より具体的には試料の埋設または表面下の構造または変化を画像化するための走査型近視野超音波ホログラフィーに関するものである。
【背景技術】
【0002】
関連出願の相互参照
本一部継続出願は、ここに参照して組み込まれる2003年8月12日出願の米国特許仮出願第60/494532号および2004年8月6日出願の米国特許出願第10/913086号の優先権を主張する。
連邦政府支援研究開発に関する記述
該当せず。
公知の超音波顕微鏡は集積回路(IC)構造などの構造を画像化するために用いられる。超音波顕微鏡の空間分解能wは次式で与えられる。
【数1】
1GHzの周波数に対して、到達可能な公称空間分解能はおよそ1.5μmである。また超音波顕微鏡で高分解能を得るには他に主として2つの障害がある。(1)インピーダンス不整合およびf2に比例する結合流体の減衰。高分解能で非破壊の機械的画像化法には他に原子間力顕微鏡(AFM)または走査型プローブ顕微鏡(SPM)プラットフォームがある。いくつかの例として、P.Maivald、HJ.Butt、S.A.C.Gould、CB.Prater、B.Drake、 J.A.Gurley、 V.B.Elings、P.K.Hansmaによる非特許文献1に記載のフォースモジュレーション顕微鏡(FMM);U.Rabe、W.Arnoldによる非特許文献2に記載の超音波AFM;さらに、O.V.Kolosov、K.Yamanakaによる非特許文献3に記載;G.S.Shekhawat、O.V.Kolosov、G.A.D.Briggs、E.O.Shaffer、S.Martin、R.Geerによる非特許文献4および非特許文献5に記載;G.S.Shekhawat、G.A.D.Briggs、O.V.Kolosov、 R.E.Geerによる非特許文献6に記載;G.S.Shekhawat、O.V.Kolosov、G.A.D.Briggs、E.O.Shaffer、SJ.Martin、R.E.Geerによる非特許文献7に記載;K.Yamanaka、H.Ogiaoによる非特許文献8に記載;K.Yamanaka、Y.Maruyama、T.Tsujiによる非特許文献9に記載;およびK.B.Crozier、G.G.Yaralioglu、F.L.Degertekin、J.D.Adams、S.C.Minne、CF.Quateによる非特許文献9に記載の超音波力顕微鏡法(UFM);などが挙げられる。従来、これらの技法はそれぞれ試料表面の静的弾性特性に敏感である。
【0003】
原子間力顕微鏡の最近の進歩によれば、超音波周波数(MHz)の振動を研究対象となる試料に加え、同じ高周波数でチップの振幅を非線形的に検出する。超音波力顕微鏡として一般に知られているこの装置では、採用される超音波周波数が顕微鏡カンチレバーの共振周波数よりも遙かに高く選定される。この顕微鏡は、原子間力がチップと試料表面との間の距離に対し、強い非線形的な依存性を有することを利用するものである。この非線形性により、試料表面が超音波によって励起された際にチップと試料表面との間の接触が超音波振動を修正する一方で、チップが載置されているカンチレバーは超音波振動に対して動的な剛体である。超音波力顕微鏡は、他の標準的な方法ではナノスケール分解能での可視化が困難であった局所的な材料組成や弾性特性および粘着特性の画像化やマッピングを可能にし、試料の動的表面における粘弾性特性の画像化とマッピングとを可能にする。
【0004】
超音波顕微鏡法に不利な点は、同法が超音波によってカンチレバーに誘起された振動の振幅のみを測定することにある。さらに、試料が特に厚く、表面が非常に不規則である、または超音波を大幅に減衰するような場合、表面振動の振幅が非常に小さくなることがある。このような状況下では、振幅が顕微鏡の感度閾値より小さなものとなり、測定が困難になる場合がある。さらに、上述した技法はいずれも音響位相を高分解能で測定するものではない。音響位相の高分解能測定によれば、試料を断層することなく、表面下の弾性画像や、表面下に存在する深部欠陥の同定を高い感度で行うことができる。
【0005】
チップ‐試料間の非線形な相互作用によって生み出される面外振動は、試料表面との弾性接触を非常に強くする。超音波力顕微鏡法(UFM)もまた、位相コントラストではなく振幅成分を使用する点を除き、同じ方法を用いる。系内に非線形性が存在する場合、位相コントラストの大半は表面に由来し、表面/表面下の位相コントラストには由来しない。また、材料が柔らかい場合にはチップ‐試料間の非線形な相互作用が結果をもたらさない場合がある。さらにUFMにおいては、高い機械的コントラストは得られても表面下のコントラストは殆ど得られない。
【非特許文献1】Nanotechnology 2、103 (1991)
【非特許文献2】Appl.Phys.Lett.64、1423 (1994)
【非特許文献3】Jpn.J.Appl.Phys.32、1095 (1993)
【非特許文献4】アルミニウム/低誘電率誘電体相互接続構造のナノスケール弾性イメージング(2000年4月、Material Research Society、Symposium Dにて発表。)
【非特許文献5】Materials Research Society Symposium Proceedings、Vol.612 (2001) pp.1
【非特許文献6】アルミニウム/低誘電率誘電体相互接続構造のナノスケール弾性イメージングおよび機械的弾性率測定、Proceedings of the International Conference on Characterization and Metrology for ULSI Technology、AIP Conference Proceedings.(2001) pp.449
【非特許文献7】Proceedings of the IEEE International Interconnect Technology Conference、96‐98、2000
【非特許文献8】Applied Physics Letters 64 (2)、1994
【非特許文献9】Applied Physics Letters 78 (13)、2001
【非特許文献10】Applied Physics Letters 76 (14)、2000
【発明の開示】
【0006】
走査型近視野超音波ホログラフィー(SNFUH)は、試料表面における超音波振動の変化を時間分解して測定する近視野法を用いる。同法は、従来の位相分解された音波顕微鏡法(すなわちトポグラフィー)に必要な遠視野音響レンズを無くすことにより、従来法の限界を克服する。
【0007】
本発明の装置の基本的な静的、動的ナノメカニカル画像化モードは、2周波数超音波ホログラフィーを用いた粘弾性の表面および表面下(例えば埋め込まれたナノ構造)をナノスケールで画像化することに基づく。本発明の走査型近視野超音波法は、カンチレバーのチップと試料の両者を超音波/マイクロ波周波数で加振する。チップ−サンプル相互作用の接触、軟接触および近接触モードにより、上記2つの超音波振動間の表面音波信号を抽出することができる。
【0008】
表面定在波の位相および振幅の摂動を、ロックインおよびSNFUH電子モジュールを介してSPM音響アンテナにより局所的に観測することができる。試料からの音波が埋め込まれた特徴物により摂動すると、その結果生じる表面定在波、特にその位相の変化がSPMカンチレバーによって効果的に観測される。このように、(非常に優れた空間分解能を有する)近視野領域において、(非破壊で、音波経路内での機械的/弾性的振動に敏感な)音波の位相と振幅が、SPM音響アンテナによって逐一、十分に解析される。その結果、試料全体が走査されると、音波摂動の図的記述が十分に記録され表示されて、試料内部の特徴物を「定量的」に表現する。
【0009】
いくつかの実施形態では、(例えば間欠的な)軟接触および/または近接触操作モードで、試料の表面および表面下(例えば埋め込み)の特色を確認する。さらにSNFUH電子モジュールは、チップ−試料間の非線形な相互作用の有無に関わらず表面音波の位相と振幅を抽出する。
【0010】
本発明のこれらの利点および新たな特徴、さらにその説明的な実施形態は、以下の記述と図面からより明確に理解されるであろう。
【0011】
上述した本発明の概要および以下の特定の実施形態は、添付の図面と関連付けて読むことでより良く理解されるであろう。本発明を説明するために、特定の実施形態を図示する。ただし、本発明は添付図面の配設および手段に限定されるものではないことを理解すべきである。
【発明を実施するための最良の形態】
【0012】
本発明のいくつかの実施形態は、非破壊で高分解の表面下ナノメカニカル画像化システムに関するものである。このシステムは、様々なナノスケール材料およびデバイス構造からの弾性的(静的)および粘弾性的(動的)応答を、超音波周波数に応じて数ナノメーターの空間分解能で直接的かつ定量的に画像化することができる。粘弾性表面下の高分解能ナノメカニカル画像化を行うためのプローブの最大目標周波数は、例えば5〜10GHz程度である。ある実施形態によるこの周波数における最大相対位相分解能は0.001°と推定され、その結果、粘弾性時間分解能は1ps未満となる。本発明のいくつかの実施形態における装置は、試料の弾性率および粘弾性応答周波数について定量的でデジタル化されたナノメータスケールのラスタイメージを得るという点で、市販の走査プローブ顕微鏡(SPM)と同様に作動する。この装置は、トポグラフィー画像、摩擦画像および力変調画像を含む従来のSPM画像化も行うことができる。
【0013】
本発明の実施形態の用途は多岐にわたるが、代表的には一般に分子電子工学、ナノシステム(NEMS)およびナノテクノロジーで不可欠なものである。従来型SPMのナノメータスケールの空間分解能と、音波または超音波顕微鏡による表面下の欠陥同定および画像化能力とを組み合わせることで、この装置はナノスケール・システムのナノ機構を評価・調査する際の重要な要求を満たす。SNFUHシステムおよび方法は以下の分野に適用することができる。(1)生物学的試料、組織および細胞のin vitro画像化、(2)ナノ複合材料中の埋設構造や介在物のナノメカニカル画像化およびIC構造やデバイスの故障解析、(3)低誘電率(low−K)材料の機械的特性、(4)3D構造および相互接続の応力変動、(5)セラミックス中の欠陥画像化と機械的特性の定量評価、など。
【0014】
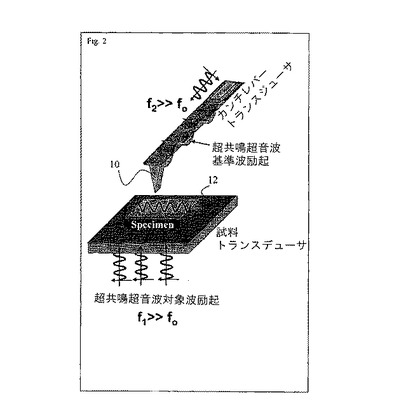
本発明のある実施形態は、2周波数超音波ホログラフィーを用いたナノスケール粘弾性表面および表面下(例えば、埋設されたナノ構造)の画像化に基づくものである。これは本質的には「走査型近視野」超音波法であり、カンチレバーチップ10と試料12との両者が超音波/マイクロ波周波数で振動する。接触および軟接触状態のチップ‐試料相互作用が、表面音波の振幅および位相の高分解能抽出を可能にする。
【0015】
SNFUHモードでは、試料の音波散乱によって生じる表面定在波の摂動がSPM音波アンテナで観測される。カンチレバーのたわみは表面定在波の摂動を単に追従するだけで、これはチップの基準周波数(すなわち、試料表面に到達する試料音波の飛行時間の遅れ)に対する散逸的なラグ/リードを示すものである。この位相成分の空間依存性を抽出すると、埋め込まれた構造、界面および内在欠陥の試料音波に対する弾性的な応答を示す画像コントラストおよび、その結果として生じる定在表面音波の摂動が得られる。
【0016】
本発明のいくつかの実施形態では、原子間力顕微鏡の高分解能を維持しつつ表面下の(例えば埋め込まれた)欠陥、剥離、亀裂、ストレスマイグレーションを測定するためのシステムが提供される。本システムは(1)カンチレバーの共振周波数よりも大きな周波数の振動をカンチレバーに与えるための加振装置16上の自由端にあるチップ10を伴うカンチレバー14を有する原子間力顕微鏡システムと、(2)試料を高周波数で励起させるため試料下に据えられた加振装置18を有する試料12と、(3)カンチレバーの動きを検出する光学的またはその他の検出器とを使用する。本システムは、振動するチップが振動する試料と検出範囲内で相互作用した際のビート周波数、積周波数、加算周波数、およびこれらの高調波の乗算値と変調波形を検出する。本実施形態では、チップ・表面間の機械的相互作用による表面音波の位相情報を回復することができるため粘弾性特性の測定が可能になり、ナノスケールサイズの表面下(例えば埋め込まれた)欠陥を画像化するための音響ホログラフィーアルゴリズムの適用が可能になる。本顕微鏡装置は、内部欠陥や埋め込まれた構造を高分解能でナノメカニカル画像化するための走査型近視野超音波ホログラフィー(SNFUH:Scanning near field ultrasound holography)を活用する。
【0017】
表面音波の振幅および位相は、ロックイン検出を介したチップのたわみ信号から実験的に抽出される。本測定の位相感度は、材料の時間分解された機械的特性の抽出に必要になると共に、潜在的には表面下(例えば埋め込まれたナノ構造)の画像化を可能にすることにも必要になる。
【0018】
本発明のある実施形態では、ウェハ/デバイス表面で、透過した音波の位相を直接検出する。さらに本発明のある実施形態では、ウェハ/デバイス表面で表面音波の位相を直接検出する。さらに本発明のある実施形態では、音響レンズを不要とするため、走査型ナノプローブ位相検出を行う。本発明のある実施形態におけるナノプローブ音響アンテナ(AFMチップ)には以下の利点がある。すなわち、本アンテナは高周波数たわみモード励起によって、ナノプローブにMHz〜GHz帯域の機械的振動を誘起する、または機械的導波装置およびカンチレバーがチップ10および試料12の音響/超音波振動間の位相シフトを観測する。
【0019】
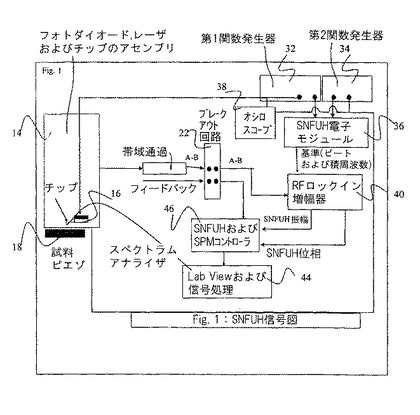
図1および図2に示すように、チップ10のSi基板と試料12の底部とにそれぞれ取り付けられた2つの整合した圧電性結晶16と18によって、2つの振動がチップと試料に加えられる。圧電要素16と18は表面音波(SAW)振幅および位相抽出のためRFロックイン増幅器40に入力周波数を供給するSNFUH電子モジュール36によって異なる波形で駆動される。SNFUH電子モジュール36は例えばビート周波数、積周波数および/または加算周波数を選択し、接触、軟接触および近接触の各モードにおけるホログラフィーの実行を補助する。さらに、SNFUH電子モジュール36はチップ・試料相互作用の直線領域でSNFUHが行われるようにする。1つの実施形態におけるSNFUH電子モジュール36は、周波数信号を混合し、積周波数、周波数和およびビート周波数などを選択するための例えばミキサ回路、可変抵抗器、オペアンプ、バンドパスフィルター、および/または他のフィルターを含む。
【0020】
ベースプラットフォームにはどのような走査型プローブ顕微鏡(SPM)を使用してもよい。SNFUHおよび弾性率校正信号の入力位置として信号アクセス・モジュール(SAM)22が用いられる。(高周波数励起のために)集積された圧電要素は、カンチレバーチップ10の高次のたわみ共振振動を励起して超音波振動を起こすことができる。
【0021】
試料の超音波振動は関数発生器32によって駆動される。第2関数発生器34は試料に超音波振動を加える。その結果生じる検出器からの差動出力信号は、信号アクセス・モジュール(SAM)22によってアクセスされ、RFロックイン増幅器30、またはSAW振幅および位相を増幅する同様なロックイン増幅器への入力として機能する。ロックイン応答信号はSAW振幅と位相とを構成し、画像表示と分析のため、SAM22を介して、信号収集回路46への入力となる。SNFUH電子モジュール回路36は、基本波形、高調波形および/または変調波形を抽出し、これが例えばRFロックイン増幅器40または他のロックイン増幅器の基準となる。光学検出器の差動出力(A−B)は、SAM22を介して、RFロックイン40への入力となる。そこからの出力がSNFUHイメージ信号を構成する。Lab Viewやその他のデータ収集/分析ソフトウェアを実行するコンピュータ44または他のプロセッサーが、デジタルスコープおよびロックイン両者からのA−B信号を収集する。ある実施形態は、例えばSNFUM信号またはUFM信号のいずれかの収集を選択するためのスイッチを含んでもよい。
【0022】
ある実施形態における試料底部の圧電性要素は、絶縁材/電極/圧電性材料/電極/絶縁材ブランケットの多層スタック(例えば、10cm×10cm)である。絶縁材は、超音波結合の効率により、エポキシ樹脂で接着された機械加工が可能なセラミックス、またはスピンコートされた薄い重合体被覆のいずれかから構成される。Cr/Au電極、または他の同様な電極が圧電性材料と第2関数発生器34とを接続する。この集成体を、改良されたSPM試料台に面一に取り付ける。
【0023】
図2に示すように、SNFUHを用い、高周波数音波が試料12の下方から発射され、その一方、もう一つ別の高周波数音波が少なくとも多少異なる周波数でSPMカンチレバーから発射される。SNFUH電子モジュール36は、試料からの音波の散乱によって生じる表面音波の定在波の位相摂動を空間的に観測するために用いられる。カンチレバーの共振周波数、f0、は例えば10〜100kHzの範囲でよい。
【0024】
いくつかの実施形態は、例えば図7に示すカンチレバー共振フィードバック回路50などのフィードバック回路を含んでもよい。本フィードバック回路は、第1オペアンプ(OA)52と、第2オペアンプ(OA)54と、位相補償器(PC)56と、電圧制御発信器(VCO)62と、波形または関数発生器68と、試料78と相互作用する圧電変換器74を有するカンチレバーチップと、を含む。
【0025】
試料を通じてSNFUH操作を一意的に更正するため、カンチレバーの位相を固定してもよい。チップの位相を固定するために、フィードバック回路50などの共振フィードバック回路を使用してもよい。フィードバック回路50は、チップのキャリア周波数を共振周波数に維持し、チップの位相が試料の位相に対して安定な基準となるように、位相を固定または設定する。例えば、高周波数(例えば、150MHz〜10GHz)では、カンチレバーはその共振周波数から容易に逸れるが、フィードバックによりカンチレバーのチップを共振周波数に維持することができる。試料およびカンチレバーの両者を、それぞれの共振周波数に維持し、高分解能の粘弾性応答を発生させることができる。ある実施形態におけるシステムでは、フィードバック回路50が周波数共振のフィードバックを発生させるフィードバックモードでの操作、またはフィードバック回路50を起動させない操作、の何れかで作動することができる。
【0026】
フィードバック回路50では、電圧制御発信器62がチップ圧電変換器74を駆動する。VCO62は位相補償器56に繋がっており、これがフィードバック制御のためのオペアンプ対52,54への入力として機能する。走査中にカンチレバーの共振周波数がシフトすると、チップ振幅の減少がカンチレバー上の圧電変換器の電圧を低下させる。この電圧がPC56の出力をシフトさせる。PC出力のシフトがVCO62を共振状態に戻す。
【0027】
図8は本発明の実施形態によって使用される電子読み取り装置800の実施形態に関連したフィードバック回路50を示す。本電子読み取り装置800は、例えばMOSFET埋め込み電子読み取り装置であってもよい。埋め込まれたMOSFETを電子フィードバック装置として使用すると、カンチレバーの曲げに対してΔId/Id=10―6/nmの電流感度が得られる。電子読み取り装置のたわみ感度は、例えば光学的フィードバック検出と同じオーダーであってもよい。ある実施形態におけるたわみ感度は、ピエゾ抵抗検出器など既存の受動および能動検出技術よりもおよそ3桁高い場合がある。ある実施形態では、高いS/N比と非常に小さな1/f雑音のため、MOSFET埋め込み電子読み取り装置が例えばSPM(走査プローブ顕微鏡)の電子フィードバックに使用できる。
【0028】
フィードバック回路50を、圧電要素86に電力を供給する電源84の制御に使用してもよい。ピエゾ素子86はAu(金)接点88などの接点、およびアクチュエータ90とBiMOSトランジスタ92とを含む。圧電素子86は発信器94によって駆動される。発振中の圧電要素86からのフィードバックは電子検出ユニット96に集められる。電子検出ユニット96からのフィードバック信号はアナログ/デジタル変換器(ADC)98によって変換され、フィードバック回路50に送られ電源84を制御する。セットポイント100は、フィードバック回路50の作動ベースまたは基準となる。回路50からのフィードバックは、例えばチップと試料とがそれぞれの共振周波数で振動することを確かにする助けとなる。
【0029】
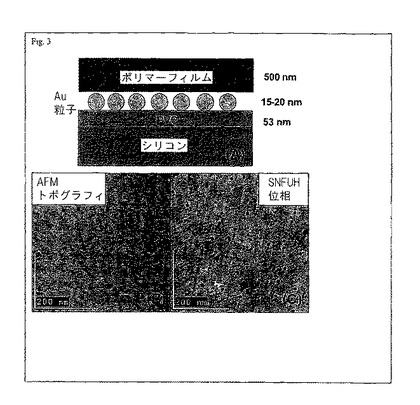
粘弾性ナノメカニカル画像化の例を図3に示す。図3Aは、ポリマー被覆基板上に分散され、厚さがおよそ500nmのポリマー層に埋め込まれた金のナノ粒子を示す。ポリマー−ナノ粒子複合材の模型を用いて、SNFUH法の高い方位分解能と深さ感度を実証する。ポリマー(ポリ(2−ビニルピリジン)−PVP)で被覆されたシリコン基板上にコロイド状の金ナノ粒子を分散させて、ポリマー層の深部に金ナノ粒子が埋め込まれた試料を作成した。金ナノ粒子は平均径が15nmでフィルム表面に良く分散している。そしてこの金ナノ粒子を、図3Aに示すように、厚さ約500nmの別のポリマーフィルムで完全に覆った。通常のAFM走査トポグラフィー(図3B)は、表面粗さが約0.5nmの上部重合体層の滑らかで特徴のない表面を示す。一方、SNFUHの位相像(図3C)は、上面から約500nmの深さに埋め込まれた金ナノ粒子の良好な分散状態を示している。重合体と金ナノ粒子との間の弾性係数の差が、試料表面に到達する音波の時間依存する位相遅れを誘起して、SNFUHの位相像のコントラストを生じさせる。
【0030】
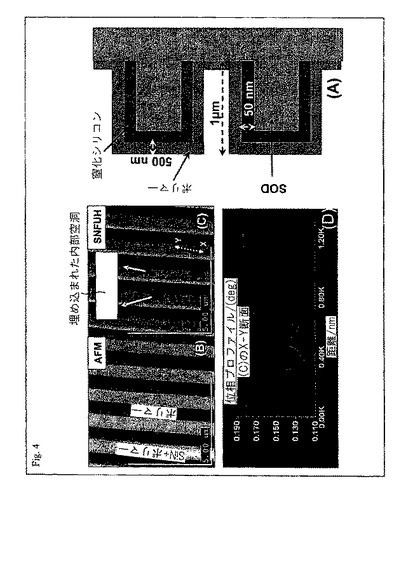
狭い溝の表層下にある欠陥の同定にSNFUHが有効であることを実証するため、図4Aに示す浅い溝構造を作製する。SOD(スピンオン誘電体)にキャッピング層として厚さ50nmのSi3N4薄膜をLPCVDで堆積し、次いで湿式エッチングでSi3N4に深さ1μmの溝を形成した。本例の溝の幅は約400nmである。厚さ500nmのポリマー「ベンゾシクロブテン(BCB)」をスピンコートし、その後、熱アニールで重合体を硬化させた。
【0031】
図4Aは一連の分離した浅い溝構造の模式図である。図4Bは従来のAFMトポグラフィー像で、図4Cは対応する(同時に記録した)SNFUH位相像である。典型的な7.5×7.5μm2のトポグラフィーは、溝内部のSiN上で均一に隣接したポリマー被覆を示している。一方、図4Bに示すこれに対応するSNFUH位相像は、ポリマー内部およびSiN−ポリマー界面に埋め込まれた空洞を想起させる位相コントラストを示している。ポリマー被覆SiN線に見られる位相像の暗いコントラストは、重合体−SiN界面の空洞、すなわち接触点下方の空洞に対応する。このコントラストは、例えば空洞からの試料の音波からの明瞭な粘弾性応答によるものである。位相像ではトレンチ内部と側壁における重合体の硬化が明らかであるが、これは例えば熱アニールや、おそらくはSODとの接着が不十分であった結果である。図4Dは図4CのX−Y断面における位相線プロファイルを示す。例えば、50ミリ度の表面下位相分解能が得られる。今日の診断法では、湿式エッチング後にSEMイメージを撮るなどの破壊的方法が行われるが、これは好ましいことではない。したがって、SNFUHはこのような表面下計測の要求に応える改善されたツールと言えよう。
【0032】
生物学における表面下に覆われた、または埋め込まれた構造のイメージを撮る際のSNFUHの有効性を図5に示す。この図は高い分解能と、マラリア原虫に感染した赤血球から生じる非常に強いコントラストとを示している。図5は赤血球内の原虫の存在を、早期に直接、細胞のラベルや薄片なしに生理学的に生きた状態で、in vitroの実空間で明示している。熱帯熱マラリアの原虫菌株3D7を、Haldarらの方法を改良してin vitroで培養した。原虫をパーコール精製法とソルビトール処理を組み合わせて4時間以内に同期活性し、所定の時間に収穫した。
【0033】
SNFUHイメージを、例として軟構造画像化用の近接触モード法を用いて撮影した。SNFUH電子モジュールによりカンチレバーを近接触モードにし、その後、近視野領域を維持しつつ試料赤血球の周りを順次走査した。図5Aおよび図5Bはそれぞれ感染した赤血球のAFMトポグラフィー像およびSNFUH位相像である。AFMトポグラフィー像は感染した赤血球の典型的な表面形態を表すが、SNFUH位相像は赤血球の内部に潜む原虫を良好なコントラストで表している。さらに、膜タンパクと細胞成分、および複数の原虫を想起させる特徴物が他にもいくつか明示されている。原虫感染の早期診断にSNFUHが有効であることをさらに実証するため、他の非侵襲的方法(例えば、蛍光タグ法)では確認が困難な、4時間のみ培養した赤血球について診断を行った。図5Cおよび図5Dは、図5Aおよび図5Bと同様な画像を示す。原虫感染の画像コントラストが一致することから、SNFUHは早期の原虫感染などにも感応できると言えよう。
【0034】
図6は、横寸法が約200nmの低誘電率(low−K)ポリマーと、同約60nmの銅線の配列を示す。図6Aは従来のトポグラフィー像で、図6Bは対応する(同時に記録した)SNFUH位相像である。典型的な1400×1400nm2トポグラフィー走査により、均一に隣接したポリマーと銅線が観察される。ただし、図6Bに示した対応するSNFUH位相像は、銅線内の表面下空洞を想起させる位相コントラストを明示している。図6Cは空洞を横切る線プロファイルである。銅線の位相像における暗いコントラストは、この金属下方の空洞に対応する。位相像にこのコントラストがあることは、底部において金属の充填が不十分な箇所があること、すなわち接点の下方に空洞があり、これが明確な粘弾性応答を受けていることを意味している。興味深いことに、位相像にはポリマーの領域とその側壁部分における硬化が明確に観察されるが、これはRIEプロセスと化学機械的研磨(CMP)によって生じたものである。SNFUHはこのような表面下の観測における課題に対しても有効なツールとなり得る。
【0035】
このようにSNFUHは;(1)プロセスに起因する機械的変動、および/またはナノスケールの凝集性欠陥を同定するための、表面下(例えば埋め込まれた)構造の高分解能・定量ナノメカニカルマッピング、(2)特に、表面および表面下の界面における接着(接合)の応答などのナノメカニカル粘弾性(動的)画像化、を容易にすることができる。
【0036】
本発明のシステムおよび方法の用途には、
(1)3次元相互接続における表面下欠陥や電気的バイアスに起因するデバイスのストレスマイグレーションの非破壊画像化、
(2)エレクトロメカニカル欠陥(例えばナノチューブ接点)の画像化を可能にし、また分子的相互接続集成体の統合性をナノスケールで画像化可能にするための、ナノスケール分解能による相互接続ナノテクノロジーの非破壊検査、
(3)強誘電体、セラミックス、ミクロメカニカル構造およびデバイスの表面下におけるナノクラック、応力、剥離、
(4)軟質材料(例えば多孔質誘電体)の弾性率測定を行い、またオフラインの断面故障解析をせずに空洞や剥離欠陥を検出するための、非破壊欠陥検査や集積回路材料およびデバイスのプロセスコントロール、
(5)生物学的細胞や材料の自己組織化単層膜、生物学的細胞、組織、膜、ナノバイオメカニックスにおけるin vitro画像化、
(6)弾性係数の高精度定量測定などがある。
【0037】
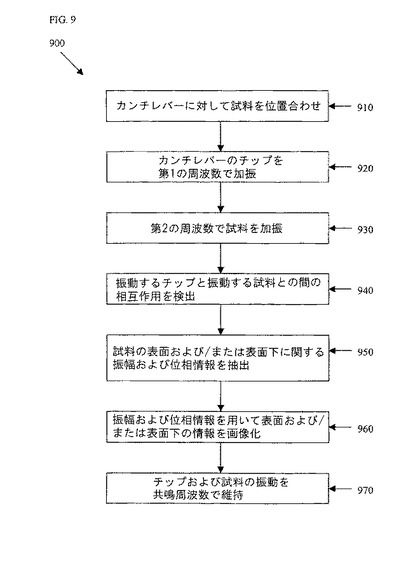
図9は、本発明の実施形態による走査型近視野ホログラフィー画像化法900のフロー図を示す。試料のナノメカニカル画像化を行うために、まず工程910においてカンチレバーに対し試料を位置合わせする。例えば細胞組織やその他の試料に対し、表面および/または表面下を画像化することができる。工程920において、カンチレバーのチップを第1の周波数で加振する。第1の周波数は、例えばマイクロ波、超音波、またはその他の音響周波数でよい。次いで工程930において、例えばマイクロ波、超音波、またはその他の音響周波数などの第2の周波数で試料を加振する。ある実施形態では、チップを加振する第1の周波数とは離れた第2の周波数で試料を加振する。ある実施形態では、チップと試料底部の圧電性要素をそれぞれの共振周波数で加振する。
【0038】
次いで工程940において、振動するチップと振動する試料との相互作用を検出する。この相互作用は、例えばチップと試料との間の物理的な相互作用、および/または、非接触の信号相互作用であってもよい。相互作用は、例えばチップの動作を構成してもよい。チップの動作は、例えばチップたわみ信号によって与えられる。ある実施形態における相互作用は、チップと試料との間の線形および/または非線形相互作用を含んでもよい。ある実施形態では、線形のチップ‐試料間の線形相互作用によるSNFUHを行い、軟接触および近接触モードで高分解能の表面下位相を得ることができる。SNFUHは、埋め込まれた欠陥や変動などの表面下の情報を得るために、軟接触および近接触モードで実行することができる。
【0039】
工程950において、表面音波に関連する振幅および位相情報を抽出する。振幅および位相情報は、例えばロックイン検出を用いチップたわみ信号から抽出してもよい。ある実施形態では、例えば界面接合などの試料に関する表面下の機械的データもまた、チップたわみ信号から抽出できる。
【0040】
工程960では、この振幅および位相情報を用いて、試料の表面および/または表面下特性を画像化することができる。ある実施形態では、例えば表面および表面下の粘弾性相の空間的変動が画像化される。ある実施形態では、試料の特性的な粘弾性応答時間を振幅および位相情報から決定する。そして工程970において、カンチレバーチップの振動をチップ圧電要素の共振周波数に維持し、試料の振動を試料の共振周波数に維持する。チップ共振周波数および試料共振周波数を維持するために、電気フィードバックなどのフィードバックを行ってもよい。
【0041】
ある実施形態では、積周波数を光学検出とともに用いて、高い表面下分解能で生物学的な画像を得ることができる。この場合、試料とカンチレバーとを、それぞれの基本共振周波数(例えば、それぞれ1.96MHzおよび3,28MHz)で励起させる。さらに、試料とカンチレバーの各キャリア周波数を、1つ以上の変調周波数(例えば、それぞれ25kHzおよび35kHz)で変調させる。次いで、SNFUH電子モジュールの出力とRFロックインバンドパスフィルターの出力とを組み合わせ、これら2つの変調波形の積を得る。この積出力をRFロックイン増幅器の基準入力に送る。
【0042】
積周波数を用いると、キャリア周波数の選定が改善される。ある実施形態では、音響振動の周波数が大きいほど、SNFUH画像から得られる位相コントラストの桁が高くなる。すなわち、低いキャリア周波数では見えない小さな特徴物が、高いキャリア周波数で見ることができる。さらに、積周波数を用いることで、整合しないチップおよびカンチレバー圧電要素を使用することができるようになる。
【0043】
ある実施形態では、SNFUHを近接触モードで操作する際に、カンチレバーと試料との間の力を制御することができる。生物学的な試料にカンチレバーを接触させると、試料を破壊するおそれがある。しかしながら近接触操作によれば、軟かい構造の観測と表面下画像化が可能になる。近接触モード操作により、軟らかい構造の表面下画像化と、例えば生物学的な構造、細胞および/または組織の定量解析とが可能になる。
【0044】
ある実施形態では、近接触モードでの試料の観測にビート周波数を用いてもよい。代わりに、周波数和を用いて近接触モードでの試料の観測を行ってもよい。ある実施形態では、基本周波数に加えて高調波を用いて、ビート周波数、積周波数、および/または周波数和(加算)操作を行ってもよい。例えば、本システムは、非常に薄いZnO薄膜を用いて、1000MHzまでの様々な周波数で光学的および/または電子検出を行うことができる。
【0045】
ある実施形態では、カンチレバーと試料キャリア周波数を振幅変調させてもよい。例えば、2つのキャリア、すなわちカンチレバーのキャリアと試料のキャリア、を個別に振幅変調させる。この構成では、チップ‐試料集成体を(整合した圧電要素の有無に関わらず)より高い周波数で励起してもよい。そして振幅変調した波形を、カンチレバーと試料との両者から得て、SNFUH電子モジュールに入力する。電子モジュールからの出力は、積/差/和周波数である。ビート周波数または差周波数は、変調周波数間の差などである。
【0046】
ある実施形態では、電子読み取り装置を観測システムとともに作動させる。このような読み取り装置の例として、ここに参照して組み込む2004年11月23日出願の米国特許出願番号10/996274、名称“Method and System for Electronic Detection of Mechanical Perturbations Using BiMOS Readouts”に記載の読み取り装置などがある。ある実施形態では、読み取り回路を用いることにより、変調なしで積周波数の使用が可能になるが、これは例えば、光学的フォトダイオードの場合のように操作が応答時間で制限されなくなるためである。
【0047】
ある実施形態では、振幅および位相の検出に電子的な検出を用いて光学検出を無くし、光検出の応答周波数、例えば1MHz、によって課せられる制約を削除もしくは除外する。電子検出を採用すると、チップ上に集積された圧電作動装置(例えばZnO)やMOSFETに埋設されたフィードバック電気回路の付いた多機能プローブの製作が容易になる。さらに電子検出は、表面下の特徴物のビート周波数に基づく検出を制限しない。複数の周波数を用いて振幅と位相コントラストの両者を強化し、その結果、粘弾性応答を高めることができる。粘弾性応答を高めることにより、ビート周波数のみを用いた検出では困難な、例えば50nm未満の特徴物の位相コントラストを高めることができる。
【0048】
このように、いくつかの実施形態では、例えば埋め込まれたナノ構造、欠陥、3D断層撮影、多層膜スタック内の個別の膜の同定、ドーパントのマッピングなどを高分解能で画像化する走査型近視野超音波ホログラフィー(SNFUH)が提供される。いくつかの実施形態では次の3つの方法が統合される:すなわち、ミクロスケールの超音波音源に結合され(方位分解能と垂直分解能が非常に優れた)走査プローブ顕微鏡プラットフォームと、(構造の深部を部分ごとに探索することを容易にする)検知法と、(画像化の位相分解能と位相結合を強化する)ホログラフィー法との組み合わせである。いくつかの実施形態では、生物学的、機械的および電子工学的試料などのナノおよびミクロ試片について表面および表面下の画像化を行うための、近視野超音波ホログラフィー、近視野マイクロ波ホログラフィー、または他の近視野音響ホログラフィーが提供される。いくつかの実施形態では、例えば接触、軟接触および/または近接触モードで、カンチレバーと試料との間の線形および/または非線形の相互作用を用いたSNFUH画像化が可能である。
【0049】
よって、本技法はナノおよびミクロ複合材、MEMS、COMOS、ヘテロ構造などの表面下欠陥の画像化を可能にする。本技法により、生物高分子、生物材料および生物学的構造(例えば、細胞膜やインプラント・生体界面)などのin vitro画像化が可能になる。さらに、いくつかの実施形態では、低誘電率材料および相互接続内の空洞や表面下の欠陥の検出、さらに3D相互接続やMEMSのストレスマイグレーションおよび欠陥分析が行われる。いくつかの実施形態では、非接触モードでドーパントのプロファイリングおよび弾性率マッピングが容易になり、さらに分子マーカー/タグ信号通路などの非侵襲的な観測が可能になる。
【0050】
ある実施形態では、高周波数(例えば数百MHzのオーダー)の音波が試料の底部から発射され、もう1つ別の音波がAFMカンチレバーから発射される。基本共振波と関連する高調波の(差周波数に加え)所望の積および和を得るため、これらの音波を各種フィルター、ミキサ、フィードバック回路および電子部品の組み合わせを含むSNFUH電子モジュールを通じて混合する。その結果生じる混合波はAFMチップにより観測される。該チップはそれ自身が位相および振幅のアンテナとして作用する。埋め込まれた特徴物によって試料の音波が摂動すると、特にその位相と局部的な表面音波が、AFMチップによって非常に効率良く観測される。このように、(非常に優れた方位および垂直分解能を有する)近視野領域で、(非破壊で、音波経路内での機械的/弾性的振動に敏感な)音波の位相と振幅が、AFM音響アンテナによって逐一、十分に解析される。その結果、試料全体が走査されると、音波摂動の図的記述が十分に記録され表示されて、試料内部の微細構造を「定量的」に表現する。
【0051】
SNFUHシステムはチップ‐試料相互作用の線形、近接触領域で作動し、SNFUH電子モジュールなどを用いることで、生物学的細胞や組織のin vitro画像化に効力を発揮する。
【0052】
このように、いくつかの実施形態ではMOSFET埋め込まれた電子読み取り装置が積周波数を検出するので、光学検出器による制約がない。さらに、電子読み取り装置は、産業用途で並列SNFUHシステムを造る助けとなる場合がある。さらにブリルアンゾーン散乱法よれば、どのような表面の弾性率マッピングを他の方法よりも効率良く非破壊的に行うことができる。
【0053】
いくつかの実施形態は、マイクロエレクトロニクス、特に高度なナノスケールの表面および表面下計測ツールに応用することができる。さらに、いくつかの実施形態では、ナノエレクトロニックスの画像化、マイクロシステム(MEMS)、ナノテクノロジー一般、および特に生体分子の相互接続およびBioMEMSの故障解析が行われる。それに加え、いくつかの実施形態では、内部構造を切開すること無くin vitroで生物学的構造を画像化する。いくつかの実施形態では、従来型SPMのナノスケールの空間分解能と表面下画像化能力とを組み合わせることにより、高分解能で表面欠陥および構造を評価することができ、潜在的には、ナノスケールの非侵襲性3D断層撮影などに発展する可能性がある。
【0054】
走査型近視野超音波ホログラフィー(SNFUH)は、例えば、積周波数の近接触および接触モードで、下記の構造およびデバイスに適用することができる。(1)集積回路(IC)構造およびMEMSの材料における、機械的均一性およびプロセス由来の機械的改質の調査;(2)マラリア原虫に感染した赤血球のリアルタイムでin vitroな生物学的画像化;(3)銅配線相互接続内の空洞、(4)重合体フィルムに埋め込まれたナノ粒子の非侵襲的な観測。ナノメカニックス、材料界面の表面下画像化、等角的に堆積された被覆の均一性、多層構造内の機械的欠陥などを調査する際に、上記のような能力は以下の断面画像化技術を補完する場合がある:SEM−EDS(走査型電子顕微鏡−エネルギー分散分光法)、TEM−EDS(透過型電子顕微鏡−エネルギー分散分光法)、TEM−EELS(透過型電子顕微鏡−電子エネルギー損失顕微鏡法)およびex situ STM(走査型顕微鏡法)。
【0055】
上述の教示に照らし、本発明のその他多くの用途、改良、変形が可能である。本発明について、いくつかの実施形態を参照しながら説明したが、当業者は本発明の範囲を逸脱することなく多くの変更や、等価な置き換えができることを理解するであろう。さらに、特定の状況や材料に適用するため本発明の範囲を逸脱することなく上記の教示に多くの改良を加えることも可能である。従って、本発明は開示された特定の実施形態によって限定されるものではなく、添付の請求範囲内の全ての実施形態を含むことを意図するものである。
【図面の簡単な説明】
【0056】
【図1】本発明の走査型近視野超音波ホログラフィーを説明するブロック図である。
【図2】振動カンチレバーと振動試料を有する本発明の原子間力顕微鏡の説明図である。
【図3】(A)は、SNFUHの検証に用いたナノ粒子システム模型の模式図である。(B)は、特徴のない重合体表面を表すAFM(トポグラフィー)画像を示す。(C)は、高分解能で埋め込まれた金ナノ粒子を明示するSNFUHの位相像を示す。
【図4】(A)は、浅い溝に埋め込まれた欠陥/空洞を検出するための試料模型の模式図を示す。(B)は、誘電体材料の均一な被覆を含むAFM(トポグラフィー)画像を示す。(C)は、表面弾性コントラストと、窒化物上に被覆されたポリマー中に埋まった空洞と、溝の壁における被覆の硬化とを明示するSNFUHの位相像を示す。(D)は、X−Yで記された空洞を横切るラインプロファイルを示す。
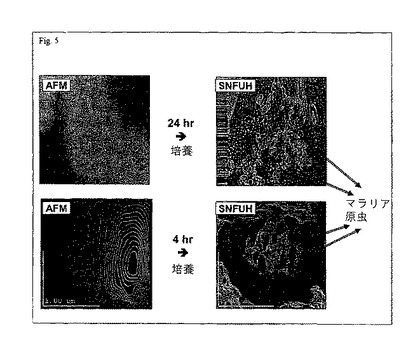
【図5】(A)は、マラリアに感染した赤血球のAFMトポグラフィーを示す。(B)は、マラリアに感染した赤血球のSNFUH位相像を示す。(C)は、マラリア感染した赤血球に潜伏する早期原虫のAFMトポグラフィーを示す。(D)は、マラリア感染した赤血球に潜伏する早期原虫のSNFUH位相像を示す。
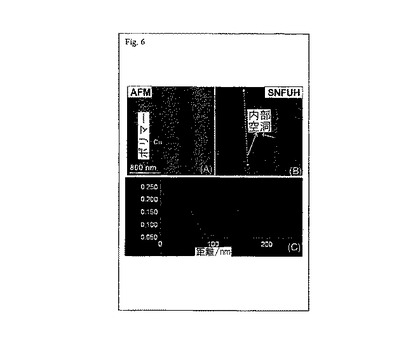
【図6】(A)は、銅−低誘電率(low K)誘電体相互接続システムのAFM(トポグラフィー)を表す。(B)は、銅−低誘電率(low K)誘電体相互接続システムのSNFUH像を表す。(C)は、(B)の空洞を横切るラインプロファイルを示す。
【図7】本発明の実施形態により用いられるフィードバック制御回路を示す。
【図8】本発明の実施形態によって使用される電子読み取り装置の実施形態に関連したフィードバック回路を示す。
【図9】本発明の実施形態による走査型近視野ホログラフィー画像化法のフロー図を示す。
【技術分野】
【0001】
本発明は、高い空間分解能を有する位相敏感な技法に関するもので、より具体的には試料の埋設または表面下の構造または変化を画像化するための走査型近視野超音波ホログラフィーに関するものである。
【背景技術】
【0002】
関連出願の相互参照
本一部継続出願は、ここに参照して組み込まれる2003年8月12日出願の米国特許仮出願第60/494532号および2004年8月6日出願の米国特許出願第10/913086号の優先権を主張する。
連邦政府支援研究開発に関する記述
該当せず。
公知の超音波顕微鏡は集積回路(IC)構造などの構造を画像化するために用いられる。超音波顕微鏡の空間分解能wは次式で与えられる。
【数1】
1GHzの周波数に対して、到達可能な公称空間分解能はおよそ1.5μmである。また超音波顕微鏡で高分解能を得るには他に主として2つの障害がある。(1)インピーダンス不整合およびf2に比例する結合流体の減衰。高分解能で非破壊の機械的画像化法には他に原子間力顕微鏡(AFM)または走査型プローブ顕微鏡(SPM)プラットフォームがある。いくつかの例として、P.Maivald、HJ.Butt、S.A.C.Gould、CB.Prater、B.Drake、 J.A.Gurley、 V.B.Elings、P.K.Hansmaによる非特許文献1に記載のフォースモジュレーション顕微鏡(FMM);U.Rabe、W.Arnoldによる非特許文献2に記載の超音波AFM;さらに、O.V.Kolosov、K.Yamanakaによる非特許文献3に記載;G.S.Shekhawat、O.V.Kolosov、G.A.D.Briggs、E.O.Shaffer、S.Martin、R.Geerによる非特許文献4および非特許文献5に記載;G.S.Shekhawat、G.A.D.Briggs、O.V.Kolosov、 R.E.Geerによる非特許文献6に記載;G.S.Shekhawat、O.V.Kolosov、G.A.D.Briggs、E.O.Shaffer、SJ.Martin、R.E.Geerによる非特許文献7に記載;K.Yamanaka、H.Ogiaoによる非特許文献8に記載;K.Yamanaka、Y.Maruyama、T.Tsujiによる非特許文献9に記載;およびK.B.Crozier、G.G.Yaralioglu、F.L.Degertekin、J.D.Adams、S.C.Minne、CF.Quateによる非特許文献9に記載の超音波力顕微鏡法(UFM);などが挙げられる。従来、これらの技法はそれぞれ試料表面の静的弾性特性に敏感である。
【0003】
原子間力顕微鏡の最近の進歩によれば、超音波周波数(MHz)の振動を研究対象となる試料に加え、同じ高周波数でチップの振幅を非線形的に検出する。超音波力顕微鏡として一般に知られているこの装置では、採用される超音波周波数が顕微鏡カンチレバーの共振周波数よりも遙かに高く選定される。この顕微鏡は、原子間力がチップと試料表面との間の距離に対し、強い非線形的な依存性を有することを利用するものである。この非線形性により、試料表面が超音波によって励起された際にチップと試料表面との間の接触が超音波振動を修正する一方で、チップが載置されているカンチレバーは超音波振動に対して動的な剛体である。超音波力顕微鏡は、他の標準的な方法ではナノスケール分解能での可視化が困難であった局所的な材料組成や弾性特性および粘着特性の画像化やマッピングを可能にし、試料の動的表面における粘弾性特性の画像化とマッピングとを可能にする。
【0004】
超音波顕微鏡法に不利な点は、同法が超音波によってカンチレバーに誘起された振動の振幅のみを測定することにある。さらに、試料が特に厚く、表面が非常に不規則である、または超音波を大幅に減衰するような場合、表面振動の振幅が非常に小さくなることがある。このような状況下では、振幅が顕微鏡の感度閾値より小さなものとなり、測定が困難になる場合がある。さらに、上述した技法はいずれも音響位相を高分解能で測定するものではない。音響位相の高分解能測定によれば、試料を断層することなく、表面下の弾性画像や、表面下に存在する深部欠陥の同定を高い感度で行うことができる。
【0005】
チップ‐試料間の非線形な相互作用によって生み出される面外振動は、試料表面との弾性接触を非常に強くする。超音波力顕微鏡法(UFM)もまた、位相コントラストではなく振幅成分を使用する点を除き、同じ方法を用いる。系内に非線形性が存在する場合、位相コントラストの大半は表面に由来し、表面/表面下の位相コントラストには由来しない。また、材料が柔らかい場合にはチップ‐試料間の非線形な相互作用が結果をもたらさない場合がある。さらにUFMにおいては、高い機械的コントラストは得られても表面下のコントラストは殆ど得られない。
【非特許文献1】Nanotechnology 2、103 (1991)
【非特許文献2】Appl.Phys.Lett.64、1423 (1994)
【非特許文献3】Jpn.J.Appl.Phys.32、1095 (1993)
【非特許文献4】アルミニウム/低誘電率誘電体相互接続構造のナノスケール弾性イメージング(2000年4月、Material Research Society、Symposium Dにて発表。)
【非特許文献5】Materials Research Society Symposium Proceedings、Vol.612 (2001) pp.1
【非特許文献6】アルミニウム/低誘電率誘電体相互接続構造のナノスケール弾性イメージングおよび機械的弾性率測定、Proceedings of the International Conference on Characterization and Metrology for ULSI Technology、AIP Conference Proceedings.(2001) pp.449
【非特許文献7】Proceedings of the IEEE International Interconnect Technology Conference、96‐98、2000
【非特許文献8】Applied Physics Letters 64 (2)、1994
【非特許文献9】Applied Physics Letters 78 (13)、2001
【非特許文献10】Applied Physics Letters 76 (14)、2000
【発明の開示】
【0006】
走査型近視野超音波ホログラフィー(SNFUH)は、試料表面における超音波振動の変化を時間分解して測定する近視野法を用いる。同法は、従来の位相分解された音波顕微鏡法(すなわちトポグラフィー)に必要な遠視野音響レンズを無くすことにより、従来法の限界を克服する。
【0007】
本発明の装置の基本的な静的、動的ナノメカニカル画像化モードは、2周波数超音波ホログラフィーを用いた粘弾性の表面および表面下(例えば埋め込まれたナノ構造)をナノスケールで画像化することに基づく。本発明の走査型近視野超音波法は、カンチレバーのチップと試料の両者を超音波/マイクロ波周波数で加振する。チップ−サンプル相互作用の接触、軟接触および近接触モードにより、上記2つの超音波振動間の表面音波信号を抽出することができる。
【0008】
表面定在波の位相および振幅の摂動を、ロックインおよびSNFUH電子モジュールを介してSPM音響アンテナにより局所的に観測することができる。試料からの音波が埋め込まれた特徴物により摂動すると、その結果生じる表面定在波、特にその位相の変化がSPMカンチレバーによって効果的に観測される。このように、(非常に優れた空間分解能を有する)近視野領域において、(非破壊で、音波経路内での機械的/弾性的振動に敏感な)音波の位相と振幅が、SPM音響アンテナによって逐一、十分に解析される。その結果、試料全体が走査されると、音波摂動の図的記述が十分に記録され表示されて、試料内部の特徴物を「定量的」に表現する。
【0009】
いくつかの実施形態では、(例えば間欠的な)軟接触および/または近接触操作モードで、試料の表面および表面下(例えば埋め込み)の特色を確認する。さらにSNFUH電子モジュールは、チップ−試料間の非線形な相互作用の有無に関わらず表面音波の位相と振幅を抽出する。
【0010】
本発明のこれらの利点および新たな特徴、さらにその説明的な実施形態は、以下の記述と図面からより明確に理解されるであろう。
【0011】
上述した本発明の概要および以下の特定の実施形態は、添付の図面と関連付けて読むことでより良く理解されるであろう。本発明を説明するために、特定の実施形態を図示する。ただし、本発明は添付図面の配設および手段に限定されるものではないことを理解すべきである。
【発明を実施するための最良の形態】
【0012】
本発明のいくつかの実施形態は、非破壊で高分解の表面下ナノメカニカル画像化システムに関するものである。このシステムは、様々なナノスケール材料およびデバイス構造からの弾性的(静的)および粘弾性的(動的)応答を、超音波周波数に応じて数ナノメーターの空間分解能で直接的かつ定量的に画像化することができる。粘弾性表面下の高分解能ナノメカニカル画像化を行うためのプローブの最大目標周波数は、例えば5〜10GHz程度である。ある実施形態によるこの周波数における最大相対位相分解能は0.001°と推定され、その結果、粘弾性時間分解能は1ps未満となる。本発明のいくつかの実施形態における装置は、試料の弾性率および粘弾性応答周波数について定量的でデジタル化されたナノメータスケールのラスタイメージを得るという点で、市販の走査プローブ顕微鏡(SPM)と同様に作動する。この装置は、トポグラフィー画像、摩擦画像および力変調画像を含む従来のSPM画像化も行うことができる。
【0013】
本発明の実施形態の用途は多岐にわたるが、代表的には一般に分子電子工学、ナノシステム(NEMS)およびナノテクノロジーで不可欠なものである。従来型SPMのナノメータスケールの空間分解能と、音波または超音波顕微鏡による表面下の欠陥同定および画像化能力とを組み合わせることで、この装置はナノスケール・システムのナノ機構を評価・調査する際の重要な要求を満たす。SNFUHシステムおよび方法は以下の分野に適用することができる。(1)生物学的試料、組織および細胞のin vitro画像化、(2)ナノ複合材料中の埋設構造や介在物のナノメカニカル画像化およびIC構造やデバイスの故障解析、(3)低誘電率(low−K)材料の機械的特性、(4)3D構造および相互接続の応力変動、(5)セラミックス中の欠陥画像化と機械的特性の定量評価、など。
【0014】
本発明のある実施形態は、2周波数超音波ホログラフィーを用いたナノスケール粘弾性表面および表面下(例えば、埋設されたナノ構造)の画像化に基づくものである。これは本質的には「走査型近視野」超音波法であり、カンチレバーチップ10と試料12との両者が超音波/マイクロ波周波数で振動する。接触および軟接触状態のチップ‐試料相互作用が、表面音波の振幅および位相の高分解能抽出を可能にする。
【0015】
SNFUHモードでは、試料の音波散乱によって生じる表面定在波の摂動がSPM音波アンテナで観測される。カンチレバーのたわみは表面定在波の摂動を単に追従するだけで、これはチップの基準周波数(すなわち、試料表面に到達する試料音波の飛行時間の遅れ)に対する散逸的なラグ/リードを示すものである。この位相成分の空間依存性を抽出すると、埋め込まれた構造、界面および内在欠陥の試料音波に対する弾性的な応答を示す画像コントラストおよび、その結果として生じる定在表面音波の摂動が得られる。
【0016】
本発明のいくつかの実施形態では、原子間力顕微鏡の高分解能を維持しつつ表面下の(例えば埋め込まれた)欠陥、剥離、亀裂、ストレスマイグレーションを測定するためのシステムが提供される。本システムは(1)カンチレバーの共振周波数よりも大きな周波数の振動をカンチレバーに与えるための加振装置16上の自由端にあるチップ10を伴うカンチレバー14を有する原子間力顕微鏡システムと、(2)試料を高周波数で励起させるため試料下に据えられた加振装置18を有する試料12と、(3)カンチレバーの動きを検出する光学的またはその他の検出器とを使用する。本システムは、振動するチップが振動する試料と検出範囲内で相互作用した際のビート周波数、積周波数、加算周波数、およびこれらの高調波の乗算値と変調波形を検出する。本実施形態では、チップ・表面間の機械的相互作用による表面音波の位相情報を回復することができるため粘弾性特性の測定が可能になり、ナノスケールサイズの表面下(例えば埋め込まれた)欠陥を画像化するための音響ホログラフィーアルゴリズムの適用が可能になる。本顕微鏡装置は、内部欠陥や埋め込まれた構造を高分解能でナノメカニカル画像化するための走査型近視野超音波ホログラフィー(SNFUH:Scanning near field ultrasound holography)を活用する。
【0017】
表面音波の振幅および位相は、ロックイン検出を介したチップのたわみ信号から実験的に抽出される。本測定の位相感度は、材料の時間分解された機械的特性の抽出に必要になると共に、潜在的には表面下(例えば埋め込まれたナノ構造)の画像化を可能にすることにも必要になる。
【0018】
本発明のある実施形態では、ウェハ/デバイス表面で、透過した音波の位相を直接検出する。さらに本発明のある実施形態では、ウェハ/デバイス表面で表面音波の位相を直接検出する。さらに本発明のある実施形態では、音響レンズを不要とするため、走査型ナノプローブ位相検出を行う。本発明のある実施形態におけるナノプローブ音響アンテナ(AFMチップ)には以下の利点がある。すなわち、本アンテナは高周波数たわみモード励起によって、ナノプローブにMHz〜GHz帯域の機械的振動を誘起する、または機械的導波装置およびカンチレバーがチップ10および試料12の音響/超音波振動間の位相シフトを観測する。
【0019】
図1および図2に示すように、チップ10のSi基板と試料12の底部とにそれぞれ取り付けられた2つの整合した圧電性結晶16と18によって、2つの振動がチップと試料に加えられる。圧電要素16と18は表面音波(SAW)振幅および位相抽出のためRFロックイン増幅器40に入力周波数を供給するSNFUH電子モジュール36によって異なる波形で駆動される。SNFUH電子モジュール36は例えばビート周波数、積周波数および/または加算周波数を選択し、接触、軟接触および近接触の各モードにおけるホログラフィーの実行を補助する。さらに、SNFUH電子モジュール36はチップ・試料相互作用の直線領域でSNFUHが行われるようにする。1つの実施形態におけるSNFUH電子モジュール36は、周波数信号を混合し、積周波数、周波数和およびビート周波数などを選択するための例えばミキサ回路、可変抵抗器、オペアンプ、バンドパスフィルター、および/または他のフィルターを含む。
【0020】
ベースプラットフォームにはどのような走査型プローブ顕微鏡(SPM)を使用してもよい。SNFUHおよび弾性率校正信号の入力位置として信号アクセス・モジュール(SAM)22が用いられる。(高周波数励起のために)集積された圧電要素は、カンチレバーチップ10の高次のたわみ共振振動を励起して超音波振動を起こすことができる。
【0021】
試料の超音波振動は関数発生器32によって駆動される。第2関数発生器34は試料に超音波振動を加える。その結果生じる検出器からの差動出力信号は、信号アクセス・モジュール(SAM)22によってアクセスされ、RFロックイン増幅器30、またはSAW振幅および位相を増幅する同様なロックイン増幅器への入力として機能する。ロックイン応答信号はSAW振幅と位相とを構成し、画像表示と分析のため、SAM22を介して、信号収集回路46への入力となる。SNFUH電子モジュール回路36は、基本波形、高調波形および/または変調波形を抽出し、これが例えばRFロックイン増幅器40または他のロックイン増幅器の基準となる。光学検出器の差動出力(A−B)は、SAM22を介して、RFロックイン40への入力となる。そこからの出力がSNFUHイメージ信号を構成する。Lab Viewやその他のデータ収集/分析ソフトウェアを実行するコンピュータ44または他のプロセッサーが、デジタルスコープおよびロックイン両者からのA−B信号を収集する。ある実施形態は、例えばSNFUM信号またはUFM信号のいずれかの収集を選択するためのスイッチを含んでもよい。
【0022】
ある実施形態における試料底部の圧電性要素は、絶縁材/電極/圧電性材料/電極/絶縁材ブランケットの多層スタック(例えば、10cm×10cm)である。絶縁材は、超音波結合の効率により、エポキシ樹脂で接着された機械加工が可能なセラミックス、またはスピンコートされた薄い重合体被覆のいずれかから構成される。Cr/Au電極、または他の同様な電極が圧電性材料と第2関数発生器34とを接続する。この集成体を、改良されたSPM試料台に面一に取り付ける。
【0023】
図2に示すように、SNFUHを用い、高周波数音波が試料12の下方から発射され、その一方、もう一つ別の高周波数音波が少なくとも多少異なる周波数でSPMカンチレバーから発射される。SNFUH電子モジュール36は、試料からの音波の散乱によって生じる表面音波の定在波の位相摂動を空間的に観測するために用いられる。カンチレバーの共振周波数、f0、は例えば10〜100kHzの範囲でよい。
【0024】
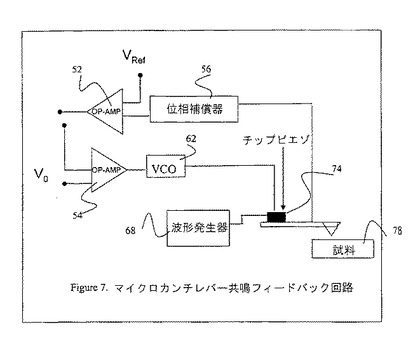
いくつかの実施形態は、例えば図7に示すカンチレバー共振フィードバック回路50などのフィードバック回路を含んでもよい。本フィードバック回路は、第1オペアンプ(OA)52と、第2オペアンプ(OA)54と、位相補償器(PC)56と、電圧制御発信器(VCO)62と、波形または関数発生器68と、試料78と相互作用する圧電変換器74を有するカンチレバーチップと、を含む。
【0025】
試料を通じてSNFUH操作を一意的に更正するため、カンチレバーの位相を固定してもよい。チップの位相を固定するために、フィードバック回路50などの共振フィードバック回路を使用してもよい。フィードバック回路50は、チップのキャリア周波数を共振周波数に維持し、チップの位相が試料の位相に対して安定な基準となるように、位相を固定または設定する。例えば、高周波数(例えば、150MHz〜10GHz)では、カンチレバーはその共振周波数から容易に逸れるが、フィードバックによりカンチレバーのチップを共振周波数に維持することができる。試料およびカンチレバーの両者を、それぞれの共振周波数に維持し、高分解能の粘弾性応答を発生させることができる。ある実施形態におけるシステムでは、フィードバック回路50が周波数共振のフィードバックを発生させるフィードバックモードでの操作、またはフィードバック回路50を起動させない操作、の何れかで作動することができる。
【0026】
フィードバック回路50では、電圧制御発信器62がチップ圧電変換器74を駆動する。VCO62は位相補償器56に繋がっており、これがフィードバック制御のためのオペアンプ対52,54への入力として機能する。走査中にカンチレバーの共振周波数がシフトすると、チップ振幅の減少がカンチレバー上の圧電変換器の電圧を低下させる。この電圧がPC56の出力をシフトさせる。PC出力のシフトがVCO62を共振状態に戻す。
【0027】
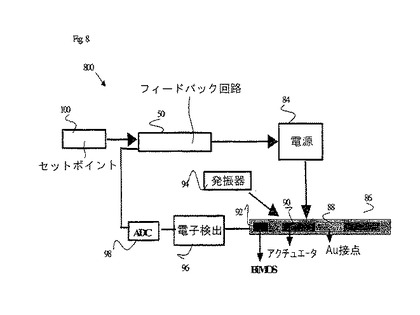
図8は本発明の実施形態によって使用される電子読み取り装置800の実施形態に関連したフィードバック回路50を示す。本電子読み取り装置800は、例えばMOSFET埋め込み電子読み取り装置であってもよい。埋め込まれたMOSFETを電子フィードバック装置として使用すると、カンチレバーの曲げに対してΔId/Id=10―6/nmの電流感度が得られる。電子読み取り装置のたわみ感度は、例えば光学的フィードバック検出と同じオーダーであってもよい。ある実施形態におけるたわみ感度は、ピエゾ抵抗検出器など既存の受動および能動検出技術よりもおよそ3桁高い場合がある。ある実施形態では、高いS/N比と非常に小さな1/f雑音のため、MOSFET埋め込み電子読み取り装置が例えばSPM(走査プローブ顕微鏡)の電子フィードバックに使用できる。
【0028】
フィードバック回路50を、圧電要素86に電力を供給する電源84の制御に使用してもよい。ピエゾ素子86はAu(金)接点88などの接点、およびアクチュエータ90とBiMOSトランジスタ92とを含む。圧電素子86は発信器94によって駆動される。発振中の圧電要素86からのフィードバックは電子検出ユニット96に集められる。電子検出ユニット96からのフィードバック信号はアナログ/デジタル変換器(ADC)98によって変換され、フィードバック回路50に送られ電源84を制御する。セットポイント100は、フィードバック回路50の作動ベースまたは基準となる。回路50からのフィードバックは、例えばチップと試料とがそれぞれの共振周波数で振動することを確かにする助けとなる。
【0029】
粘弾性ナノメカニカル画像化の例を図3に示す。図3Aは、ポリマー被覆基板上に分散され、厚さがおよそ500nmのポリマー層に埋め込まれた金のナノ粒子を示す。ポリマー−ナノ粒子複合材の模型を用いて、SNFUH法の高い方位分解能と深さ感度を実証する。ポリマー(ポリ(2−ビニルピリジン)−PVP)で被覆されたシリコン基板上にコロイド状の金ナノ粒子を分散させて、ポリマー層の深部に金ナノ粒子が埋め込まれた試料を作成した。金ナノ粒子は平均径が15nmでフィルム表面に良く分散している。そしてこの金ナノ粒子を、図3Aに示すように、厚さ約500nmの別のポリマーフィルムで完全に覆った。通常のAFM走査トポグラフィー(図3B)は、表面粗さが約0.5nmの上部重合体層の滑らかで特徴のない表面を示す。一方、SNFUHの位相像(図3C)は、上面から約500nmの深さに埋め込まれた金ナノ粒子の良好な分散状態を示している。重合体と金ナノ粒子との間の弾性係数の差が、試料表面に到達する音波の時間依存する位相遅れを誘起して、SNFUHの位相像のコントラストを生じさせる。
【0030】
狭い溝の表層下にある欠陥の同定にSNFUHが有効であることを実証するため、図4Aに示す浅い溝構造を作製する。SOD(スピンオン誘電体)にキャッピング層として厚さ50nmのSi3N4薄膜をLPCVDで堆積し、次いで湿式エッチングでSi3N4に深さ1μmの溝を形成した。本例の溝の幅は約400nmである。厚さ500nmのポリマー「ベンゾシクロブテン(BCB)」をスピンコートし、その後、熱アニールで重合体を硬化させた。
【0031】
図4Aは一連の分離した浅い溝構造の模式図である。図4Bは従来のAFMトポグラフィー像で、図4Cは対応する(同時に記録した)SNFUH位相像である。典型的な7.5×7.5μm2のトポグラフィーは、溝内部のSiN上で均一に隣接したポリマー被覆を示している。一方、図4Bに示すこれに対応するSNFUH位相像は、ポリマー内部およびSiN−ポリマー界面に埋め込まれた空洞を想起させる位相コントラストを示している。ポリマー被覆SiN線に見られる位相像の暗いコントラストは、重合体−SiN界面の空洞、すなわち接触点下方の空洞に対応する。このコントラストは、例えば空洞からの試料の音波からの明瞭な粘弾性応答によるものである。位相像ではトレンチ内部と側壁における重合体の硬化が明らかであるが、これは例えば熱アニールや、おそらくはSODとの接着が不十分であった結果である。図4Dは図4CのX−Y断面における位相線プロファイルを示す。例えば、50ミリ度の表面下位相分解能が得られる。今日の診断法では、湿式エッチング後にSEMイメージを撮るなどの破壊的方法が行われるが、これは好ましいことではない。したがって、SNFUHはこのような表面下計測の要求に応える改善されたツールと言えよう。
【0032】
生物学における表面下に覆われた、または埋め込まれた構造のイメージを撮る際のSNFUHの有効性を図5に示す。この図は高い分解能と、マラリア原虫に感染した赤血球から生じる非常に強いコントラストとを示している。図5は赤血球内の原虫の存在を、早期に直接、細胞のラベルや薄片なしに生理学的に生きた状態で、in vitroの実空間で明示している。熱帯熱マラリアの原虫菌株3D7を、Haldarらの方法を改良してin vitroで培養した。原虫をパーコール精製法とソルビトール処理を組み合わせて4時間以内に同期活性し、所定の時間に収穫した。
【0033】
SNFUHイメージを、例として軟構造画像化用の近接触モード法を用いて撮影した。SNFUH電子モジュールによりカンチレバーを近接触モードにし、その後、近視野領域を維持しつつ試料赤血球の周りを順次走査した。図5Aおよび図5Bはそれぞれ感染した赤血球のAFMトポグラフィー像およびSNFUH位相像である。AFMトポグラフィー像は感染した赤血球の典型的な表面形態を表すが、SNFUH位相像は赤血球の内部に潜む原虫を良好なコントラストで表している。さらに、膜タンパクと細胞成分、および複数の原虫を想起させる特徴物が他にもいくつか明示されている。原虫感染の早期診断にSNFUHが有効であることをさらに実証するため、他の非侵襲的方法(例えば、蛍光タグ法)では確認が困難な、4時間のみ培養した赤血球について診断を行った。図5Cおよび図5Dは、図5Aおよび図5Bと同様な画像を示す。原虫感染の画像コントラストが一致することから、SNFUHは早期の原虫感染などにも感応できると言えよう。
【0034】
図6は、横寸法が約200nmの低誘電率(low−K)ポリマーと、同約60nmの銅線の配列を示す。図6Aは従来のトポグラフィー像で、図6Bは対応する(同時に記録した)SNFUH位相像である。典型的な1400×1400nm2トポグラフィー走査により、均一に隣接したポリマーと銅線が観察される。ただし、図6Bに示した対応するSNFUH位相像は、銅線内の表面下空洞を想起させる位相コントラストを明示している。図6Cは空洞を横切る線プロファイルである。銅線の位相像における暗いコントラストは、この金属下方の空洞に対応する。位相像にこのコントラストがあることは、底部において金属の充填が不十分な箇所があること、すなわち接点の下方に空洞があり、これが明確な粘弾性応答を受けていることを意味している。興味深いことに、位相像にはポリマーの領域とその側壁部分における硬化が明確に観察されるが、これはRIEプロセスと化学機械的研磨(CMP)によって生じたものである。SNFUHはこのような表面下の観測における課題に対しても有効なツールとなり得る。
【0035】
このようにSNFUHは;(1)プロセスに起因する機械的変動、および/またはナノスケールの凝集性欠陥を同定するための、表面下(例えば埋め込まれた)構造の高分解能・定量ナノメカニカルマッピング、(2)特に、表面および表面下の界面における接着(接合)の応答などのナノメカニカル粘弾性(動的)画像化、を容易にすることができる。
【0036】
本発明のシステムおよび方法の用途には、
(1)3次元相互接続における表面下欠陥や電気的バイアスに起因するデバイスのストレスマイグレーションの非破壊画像化、
(2)エレクトロメカニカル欠陥(例えばナノチューブ接点)の画像化を可能にし、また分子的相互接続集成体の統合性をナノスケールで画像化可能にするための、ナノスケール分解能による相互接続ナノテクノロジーの非破壊検査、
(3)強誘電体、セラミックス、ミクロメカニカル構造およびデバイスの表面下におけるナノクラック、応力、剥離、
(4)軟質材料(例えば多孔質誘電体)の弾性率測定を行い、またオフラインの断面故障解析をせずに空洞や剥離欠陥を検出するための、非破壊欠陥検査や集積回路材料およびデバイスのプロセスコントロール、
(5)生物学的細胞や材料の自己組織化単層膜、生物学的細胞、組織、膜、ナノバイオメカニックスにおけるin vitro画像化、
(6)弾性係数の高精度定量測定などがある。
【0037】
図9は、本発明の実施形態による走査型近視野ホログラフィー画像化法900のフロー図を示す。試料のナノメカニカル画像化を行うために、まず工程910においてカンチレバーに対し試料を位置合わせする。例えば細胞組織やその他の試料に対し、表面および/または表面下を画像化することができる。工程920において、カンチレバーのチップを第1の周波数で加振する。第1の周波数は、例えばマイクロ波、超音波、またはその他の音響周波数でよい。次いで工程930において、例えばマイクロ波、超音波、またはその他の音響周波数などの第2の周波数で試料を加振する。ある実施形態では、チップを加振する第1の周波数とは離れた第2の周波数で試料を加振する。ある実施形態では、チップと試料底部の圧電性要素をそれぞれの共振周波数で加振する。
【0038】
次いで工程940において、振動するチップと振動する試料との相互作用を検出する。この相互作用は、例えばチップと試料との間の物理的な相互作用、および/または、非接触の信号相互作用であってもよい。相互作用は、例えばチップの動作を構成してもよい。チップの動作は、例えばチップたわみ信号によって与えられる。ある実施形態における相互作用は、チップと試料との間の線形および/または非線形相互作用を含んでもよい。ある実施形態では、線形のチップ‐試料間の線形相互作用によるSNFUHを行い、軟接触および近接触モードで高分解能の表面下位相を得ることができる。SNFUHは、埋め込まれた欠陥や変動などの表面下の情報を得るために、軟接触および近接触モードで実行することができる。
【0039】
工程950において、表面音波に関連する振幅および位相情報を抽出する。振幅および位相情報は、例えばロックイン検出を用いチップたわみ信号から抽出してもよい。ある実施形態では、例えば界面接合などの試料に関する表面下の機械的データもまた、チップたわみ信号から抽出できる。
【0040】
工程960では、この振幅および位相情報を用いて、試料の表面および/または表面下特性を画像化することができる。ある実施形態では、例えば表面および表面下の粘弾性相の空間的変動が画像化される。ある実施形態では、試料の特性的な粘弾性応答時間を振幅および位相情報から決定する。そして工程970において、カンチレバーチップの振動をチップ圧電要素の共振周波数に維持し、試料の振動を試料の共振周波数に維持する。チップ共振周波数および試料共振周波数を維持するために、電気フィードバックなどのフィードバックを行ってもよい。
【0041】
ある実施形態では、積周波数を光学検出とともに用いて、高い表面下分解能で生物学的な画像を得ることができる。この場合、試料とカンチレバーとを、それぞれの基本共振周波数(例えば、それぞれ1.96MHzおよび3,28MHz)で励起させる。さらに、試料とカンチレバーの各キャリア周波数を、1つ以上の変調周波数(例えば、それぞれ25kHzおよび35kHz)で変調させる。次いで、SNFUH電子モジュールの出力とRFロックインバンドパスフィルターの出力とを組み合わせ、これら2つの変調波形の積を得る。この積出力をRFロックイン増幅器の基準入力に送る。
【0042】
積周波数を用いると、キャリア周波数の選定が改善される。ある実施形態では、音響振動の周波数が大きいほど、SNFUH画像から得られる位相コントラストの桁が高くなる。すなわち、低いキャリア周波数では見えない小さな特徴物が、高いキャリア周波数で見ることができる。さらに、積周波数を用いることで、整合しないチップおよびカンチレバー圧電要素を使用することができるようになる。
【0043】
ある実施形態では、SNFUHを近接触モードで操作する際に、カンチレバーと試料との間の力を制御することができる。生物学的な試料にカンチレバーを接触させると、試料を破壊するおそれがある。しかしながら近接触操作によれば、軟かい構造の観測と表面下画像化が可能になる。近接触モード操作により、軟らかい構造の表面下画像化と、例えば生物学的な構造、細胞および/または組織の定量解析とが可能になる。
【0044】
ある実施形態では、近接触モードでの試料の観測にビート周波数を用いてもよい。代わりに、周波数和を用いて近接触モードでの試料の観測を行ってもよい。ある実施形態では、基本周波数に加えて高調波を用いて、ビート周波数、積周波数、および/または周波数和(加算)操作を行ってもよい。例えば、本システムは、非常に薄いZnO薄膜を用いて、1000MHzまでの様々な周波数で光学的および/または電子検出を行うことができる。
【0045】
ある実施形態では、カンチレバーと試料キャリア周波数を振幅変調させてもよい。例えば、2つのキャリア、すなわちカンチレバーのキャリアと試料のキャリア、を個別に振幅変調させる。この構成では、チップ‐試料集成体を(整合した圧電要素の有無に関わらず)より高い周波数で励起してもよい。そして振幅変調した波形を、カンチレバーと試料との両者から得て、SNFUH電子モジュールに入力する。電子モジュールからの出力は、積/差/和周波数である。ビート周波数または差周波数は、変調周波数間の差などである。
【0046】
ある実施形態では、電子読み取り装置を観測システムとともに作動させる。このような読み取り装置の例として、ここに参照して組み込む2004年11月23日出願の米国特許出願番号10/996274、名称“Method and System for Electronic Detection of Mechanical Perturbations Using BiMOS Readouts”に記載の読み取り装置などがある。ある実施形態では、読み取り回路を用いることにより、変調なしで積周波数の使用が可能になるが、これは例えば、光学的フォトダイオードの場合のように操作が応答時間で制限されなくなるためである。
【0047】
ある実施形態では、振幅および位相の検出に電子的な検出を用いて光学検出を無くし、光検出の応答周波数、例えば1MHz、によって課せられる制約を削除もしくは除外する。電子検出を採用すると、チップ上に集積された圧電作動装置(例えばZnO)やMOSFETに埋設されたフィードバック電気回路の付いた多機能プローブの製作が容易になる。さらに電子検出は、表面下の特徴物のビート周波数に基づく検出を制限しない。複数の周波数を用いて振幅と位相コントラストの両者を強化し、その結果、粘弾性応答を高めることができる。粘弾性応答を高めることにより、ビート周波数のみを用いた検出では困難な、例えば50nm未満の特徴物の位相コントラストを高めることができる。
【0048】
このように、いくつかの実施形態では、例えば埋め込まれたナノ構造、欠陥、3D断層撮影、多層膜スタック内の個別の膜の同定、ドーパントのマッピングなどを高分解能で画像化する走査型近視野超音波ホログラフィー(SNFUH)が提供される。いくつかの実施形態では次の3つの方法が統合される:すなわち、ミクロスケールの超音波音源に結合され(方位分解能と垂直分解能が非常に優れた)走査プローブ顕微鏡プラットフォームと、(構造の深部を部分ごとに探索することを容易にする)検知法と、(画像化の位相分解能と位相結合を強化する)ホログラフィー法との組み合わせである。いくつかの実施形態では、生物学的、機械的および電子工学的試料などのナノおよびミクロ試片について表面および表面下の画像化を行うための、近視野超音波ホログラフィー、近視野マイクロ波ホログラフィー、または他の近視野音響ホログラフィーが提供される。いくつかの実施形態では、例えば接触、軟接触および/または近接触モードで、カンチレバーと試料との間の線形および/または非線形の相互作用を用いたSNFUH画像化が可能である。
【0049】
よって、本技法はナノおよびミクロ複合材、MEMS、COMOS、ヘテロ構造などの表面下欠陥の画像化を可能にする。本技法により、生物高分子、生物材料および生物学的構造(例えば、細胞膜やインプラント・生体界面)などのin vitro画像化が可能になる。さらに、いくつかの実施形態では、低誘電率材料および相互接続内の空洞や表面下の欠陥の検出、さらに3D相互接続やMEMSのストレスマイグレーションおよび欠陥分析が行われる。いくつかの実施形態では、非接触モードでドーパントのプロファイリングおよび弾性率マッピングが容易になり、さらに分子マーカー/タグ信号通路などの非侵襲的な観測が可能になる。
【0050】
ある実施形態では、高周波数(例えば数百MHzのオーダー)の音波が試料の底部から発射され、もう1つ別の音波がAFMカンチレバーから発射される。基本共振波と関連する高調波の(差周波数に加え)所望の積および和を得るため、これらの音波を各種フィルター、ミキサ、フィードバック回路および電子部品の組み合わせを含むSNFUH電子モジュールを通じて混合する。その結果生じる混合波はAFMチップにより観測される。該チップはそれ自身が位相および振幅のアンテナとして作用する。埋め込まれた特徴物によって試料の音波が摂動すると、特にその位相と局部的な表面音波が、AFMチップによって非常に効率良く観測される。このように、(非常に優れた方位および垂直分解能を有する)近視野領域で、(非破壊で、音波経路内での機械的/弾性的振動に敏感な)音波の位相と振幅が、AFM音響アンテナによって逐一、十分に解析される。その結果、試料全体が走査されると、音波摂動の図的記述が十分に記録され表示されて、試料内部の微細構造を「定量的」に表現する。
【0051】
SNFUHシステムはチップ‐試料相互作用の線形、近接触領域で作動し、SNFUH電子モジュールなどを用いることで、生物学的細胞や組織のin vitro画像化に効力を発揮する。
【0052】
このように、いくつかの実施形態ではMOSFET埋め込まれた電子読み取り装置が積周波数を検出するので、光学検出器による制約がない。さらに、電子読み取り装置は、産業用途で並列SNFUHシステムを造る助けとなる場合がある。さらにブリルアンゾーン散乱法よれば、どのような表面の弾性率マッピングを他の方法よりも効率良く非破壊的に行うことができる。
【0053】
いくつかの実施形態は、マイクロエレクトロニクス、特に高度なナノスケールの表面および表面下計測ツールに応用することができる。さらに、いくつかの実施形態では、ナノエレクトロニックスの画像化、マイクロシステム(MEMS)、ナノテクノロジー一般、および特に生体分子の相互接続およびBioMEMSの故障解析が行われる。それに加え、いくつかの実施形態では、内部構造を切開すること無くin vitroで生物学的構造を画像化する。いくつかの実施形態では、従来型SPMのナノスケールの空間分解能と表面下画像化能力とを組み合わせることにより、高分解能で表面欠陥および構造を評価することができ、潜在的には、ナノスケールの非侵襲性3D断層撮影などに発展する可能性がある。
【0054】
走査型近視野超音波ホログラフィー(SNFUH)は、例えば、積周波数の近接触および接触モードで、下記の構造およびデバイスに適用することができる。(1)集積回路(IC)構造およびMEMSの材料における、機械的均一性およびプロセス由来の機械的改質の調査;(2)マラリア原虫に感染した赤血球のリアルタイムでin vitroな生物学的画像化;(3)銅配線相互接続内の空洞、(4)重合体フィルムに埋め込まれたナノ粒子の非侵襲的な観測。ナノメカニックス、材料界面の表面下画像化、等角的に堆積された被覆の均一性、多層構造内の機械的欠陥などを調査する際に、上記のような能力は以下の断面画像化技術を補完する場合がある:SEM−EDS(走査型電子顕微鏡−エネルギー分散分光法)、TEM−EDS(透過型電子顕微鏡−エネルギー分散分光法)、TEM−EELS(透過型電子顕微鏡−電子エネルギー損失顕微鏡法)およびex situ STM(走査型顕微鏡法)。
【0055】
上述の教示に照らし、本発明のその他多くの用途、改良、変形が可能である。本発明について、いくつかの実施形態を参照しながら説明したが、当業者は本発明の範囲を逸脱することなく多くの変更や、等価な置き換えができることを理解するであろう。さらに、特定の状況や材料に適用するため本発明の範囲を逸脱することなく上記の教示に多くの改良を加えることも可能である。従って、本発明は開示された特定の実施形態によって限定されるものではなく、添付の請求範囲内の全ての実施形態を含むことを意図するものである。
【図面の簡単な説明】
【0056】
【図1】本発明の走査型近視野超音波ホログラフィーを説明するブロック図である。
【図2】振動カンチレバーと振動試料を有する本発明の原子間力顕微鏡の説明図である。
【図3】(A)は、SNFUHの検証に用いたナノ粒子システム模型の模式図である。(B)は、特徴のない重合体表面を表すAFM(トポグラフィー)画像を示す。(C)は、高分解能で埋め込まれた金ナノ粒子を明示するSNFUHの位相像を示す。
【図4】(A)は、浅い溝に埋め込まれた欠陥/空洞を検出するための試料模型の模式図を示す。(B)は、誘電体材料の均一な被覆を含むAFM(トポグラフィー)画像を示す。(C)は、表面弾性コントラストと、窒化物上に被覆されたポリマー中に埋まった空洞と、溝の壁における被覆の硬化とを明示するSNFUHの位相像を示す。(D)は、X−Yで記された空洞を横切るラインプロファイルを示す。
【図5】(A)は、マラリアに感染した赤血球のAFMトポグラフィーを示す。(B)は、マラリアに感染した赤血球のSNFUH位相像を示す。(C)は、マラリア感染した赤血球に潜伏する早期原虫のAFMトポグラフィーを示す。(D)は、マラリア感染した赤血球に潜伏する早期原虫のSNFUH位相像を示す。
【図6】(A)は、銅−低誘電率(low K)誘電体相互接続システムのAFM(トポグラフィー)を表す。(B)は、銅−低誘電率(low K)誘電体相互接続システムのSNFUH像を表す。(C)は、(B)の空洞を横切るラインプロファイルを示す。
【図7】本発明の実施形態により用いられるフィードバック制御回路を示す。
【図8】本発明の実施形態によって使用される電子読み取り装置の実施形態に関連したフィードバック回路を示す。
【図9】本発明の実施形態による走査型近視野ホログラフィー画像化法のフロー図を示す。
【特許請求の範囲】
【請求項1】
表面および表面下を画像化する走査型近視野超音波ホログラフィーの方法であって、
カンチレバーチップを第1の超音波周波数で振動させること、
試料を第2の超音波周波数で振動させること、
チップたわみ信号を得るために、振動する前記試料と相互作用する前記カンチレバーチップの動作を検出すること、および
ロックイン検出を用いて、前記試料の表面および表面下に関連する、表面音波(SAW)の振幅および位相情報を抽出すること
を含む、方法。
【請求項2】
前記抽出する工程が、ロックイン検出と、走査型近視野超音波ホログラフィー(SNFUH)電子モジュールとを用いて、前記試料の表面および表面下に関連する、表面音波(SAW)の振幅および位相情報を抽出することをさらに含む、請求項1に記載の方法。
【請求項3】
前記第2の超音波周波数が、前記第1の超音波周波数から離れた周波数で前記試料を振動させる、請求項1記載の方法。
【請求項4】
前記抽出する工程が前記試料に関する表面下の機械的なデータを前記チップのたわみ信号から抽出することをさらに含む、請求項1記載の方法。
【請求項5】
前記表面下の機械的なデータが界面接合を含む、請求項4記載の方法。
【請求項6】
表面および表面下の粘弾性相の空間的変動を画像化することをさらに含む、請求項1記載の方法。
【請求項7】
前記振幅および位相情報に基づき、前記試料の特性粘弾性応答時間(characteristic viscoelastic response time)を定めることをさらに含む、請求項1記載の方法。
【請求項8】
カンチレバーチップ圧電要素の前記振動を、チップ圧電要素の共振周波数に維持し、前記試料の前記振動を試料共振周波数に維持することをさらに含む、請求項1記載の方法。
【請求項9】
前記チップ圧電要素共振周波数と前記試料共振周波数を維持するため、電気的フィードバックを設けることをさらに含む、請求項8の方法。
【請求項10】
前記試料を近接触モードで観測するための前記たわみ信号を発生させるために、ビート周波数、積周波数、および周波数和の少なくとも1つが用いられる、請求項1記載の方法。
【請求項11】
前記カンチレバーチップと前記試料との間で接触の無い近接触モードで操作することをさらに含む、請求項1記載の方法。
【請求項12】
表面および表面下を画像化する走査型近視野ホログラフィーの方法であって、
カンチレバーチップを第1のマイクロ波周波数で振動させること、
試料を第2のマイクロ波周波数で振動させること、
チップたわみ信号を得るために、振動する前記試料と相互作用する前記カンチレバーチップの動作を検出すること、および
ロックイン検出を用いて、表面音波(SAW)の振幅および位相から前記試料の表面下に関連する情報を前記チップたわみ信号から抽出すること
を含む、方法。
【請求項13】
前記抽出する工程が、ロックイン検出と、走査型近視野超音波ホログラフィー(SNFUH)電子モジュールとを用いて、表面音波(SAW)の前記試料の振幅および位相から表面下に関連する情報を前記たわみ信号から抽出することをさらに含む、請求項12記載の方法。
【請求項14】
前記試料の表面でビートを検出するため前記カンチレバーチップと前記試料との間の線形相互作用を用いること、および
前記第1のマイクロ波周波数と前記第2のマイクロ波信号の位相および振幅信号を抽出することをさらに含む、請求項12記載の方法。
【請求項15】
前記チップたわみ信号の前記振幅および位相情報に基づき前記試料の前記表面と表面下を画像化することをさらに含む、請求項12記載の方法。
【請求項16】
原子間力顕微鏡法システムであって、
一端にチップを含むカンチレバーと、
前記チップにおいて振動を発生させるように前記カンチレバーを第1の周波数で振動させる加振装置と、
前記チップと試料表面との間の原子間力に基づいて前記チップの動作を検出する検出器と
を備え、
前記試料が前記第1の周波数とは異なる第2の高周波数励起により振動する、システム。
【請求項17】
前記カンチレバーチップの振動を共振周波数に維持するように構成された電子フィードバック回路をさらに備える、請求項16記載のシステム。
【請求項18】
前記電子フィードバック回路がMOSFETベースの電子読み取り回路を含む、請求項17記載のシステム。
【請求項19】
前記第1の周波数および前記第2の周波数が、それぞれ振幅変調されたキャリア周波数を含む、請求項16記載のシステム。
【請求項20】
前記第1および第2キャリア周波数を決定するために、積周波数、ビート周波数および加算周波数の少なくとも1つが用いられる、請求項19記載のシステム。
【請求項21】
前記カンチレバーが、前記チップと前記試料との間で接触の無い近接触モードで作動する、請求項16記載のシステム。
【請求項22】
近接触モードにある前記試料の観測に、ビート周波数、積周波数および周波数和の少なくとも1つが使用される、請求項21記載のシステム。
【請求項23】
前記ビート周波数、積周波数および周波数和の少なくとも1つを発生に、高調波および基本周波数の少なくとも1つが用いられる、請求項22記載のシステム。
【請求項24】
前記チップの前記動作が、前記試料中に埋め込まれたナノ構造、欠陥およびドーパントマッピングの少なくとも1つを確認するために用いられる、請求項16記載のシステム。
【請求項25】
前記第1の周波数の振動と、前記第2の周波数の振動とが混合されて混合音波信号を形成し、前記混合音波信号が電子的に処理され、前記混合音波信号の位相と振幅とに基づき前記試料の内部構造を決定する、請求項16記載のシステム。
【請求項26】
前記動作が前記チップと前記試料との間の線形相互作用を含む、請求項16記載のシステム。
【請求項27】
走査型近視野音響ホログラフィーシステムであって、
第1の高周波音波を試料の底部から発射するように構成された音波発生器と、
前記カンチレバーの基部からの第2の音波と
を備え、前記カンチレバーが一端にチップを含み、前記チップが音波信号から位相および振幅情報を受信するアンテナとして機能し、さらに、
前記第1および第2音波を混合して前記試料の表面および表面下を代表する積周波数、加算周波数および差周波数の少なくとも1つを発生することができる走査型近視野音響ホログラフィーモジュール(SNFUH)電子モジュールを備える、システム。
【請求項28】
前記電子モジュールが、前記第1および第2音波を維持するためのフィードバックを与えることができるフィードバック回路をさらに備える、請求項27記載のシステム。
【請求項29】
前記第1および第2の音波が基本共振周波数と、関連する高調波とを含む、請求項27記載のシステム。
【請求項30】
前記第1の音波が前記試料の表面下にある特徴物によって摂動される、請求項27記載のシステム。
【請求項31】
前記電子モジュールが前記第1の音波の摂動を検出し、前記試料の内部微細構造を表す波動摂動の描写を構成する、請求項30記載のシステム。
【請求項1】
表面および表面下を画像化する走査型近視野超音波ホログラフィーの方法であって、
カンチレバーチップを第1の超音波周波数で振動させること、
試料を第2の超音波周波数で振動させること、
チップたわみ信号を得るために、振動する前記試料と相互作用する前記カンチレバーチップの動作を検出すること、および
ロックイン検出を用いて、前記試料の表面および表面下に関連する、表面音波(SAW)の振幅および位相情報を抽出すること
を含む、方法。
【請求項2】
前記抽出する工程が、ロックイン検出と、走査型近視野超音波ホログラフィー(SNFUH)電子モジュールとを用いて、前記試料の表面および表面下に関連する、表面音波(SAW)の振幅および位相情報を抽出することをさらに含む、請求項1に記載の方法。
【請求項3】
前記第2の超音波周波数が、前記第1の超音波周波数から離れた周波数で前記試料を振動させる、請求項1記載の方法。
【請求項4】
前記抽出する工程が前記試料に関する表面下の機械的なデータを前記チップのたわみ信号から抽出することをさらに含む、請求項1記載の方法。
【請求項5】
前記表面下の機械的なデータが界面接合を含む、請求項4記載の方法。
【請求項6】
表面および表面下の粘弾性相の空間的変動を画像化することをさらに含む、請求項1記載の方法。
【請求項7】
前記振幅および位相情報に基づき、前記試料の特性粘弾性応答時間(characteristic viscoelastic response time)を定めることをさらに含む、請求項1記載の方法。
【請求項8】
カンチレバーチップ圧電要素の前記振動を、チップ圧電要素の共振周波数に維持し、前記試料の前記振動を試料共振周波数に維持することをさらに含む、請求項1記載の方法。
【請求項9】
前記チップ圧電要素共振周波数と前記試料共振周波数を維持するため、電気的フィードバックを設けることをさらに含む、請求項8の方法。
【請求項10】
前記試料を近接触モードで観測するための前記たわみ信号を発生させるために、ビート周波数、積周波数、および周波数和の少なくとも1つが用いられる、請求項1記載の方法。
【請求項11】
前記カンチレバーチップと前記試料との間で接触の無い近接触モードで操作することをさらに含む、請求項1記載の方法。
【請求項12】
表面および表面下を画像化する走査型近視野ホログラフィーの方法であって、
カンチレバーチップを第1のマイクロ波周波数で振動させること、
試料を第2のマイクロ波周波数で振動させること、
チップたわみ信号を得るために、振動する前記試料と相互作用する前記カンチレバーチップの動作を検出すること、および
ロックイン検出を用いて、表面音波(SAW)の振幅および位相から前記試料の表面下に関連する情報を前記チップたわみ信号から抽出すること
を含む、方法。
【請求項13】
前記抽出する工程が、ロックイン検出と、走査型近視野超音波ホログラフィー(SNFUH)電子モジュールとを用いて、表面音波(SAW)の前記試料の振幅および位相から表面下に関連する情報を前記たわみ信号から抽出することをさらに含む、請求項12記載の方法。
【請求項14】
前記試料の表面でビートを検出するため前記カンチレバーチップと前記試料との間の線形相互作用を用いること、および
前記第1のマイクロ波周波数と前記第2のマイクロ波信号の位相および振幅信号を抽出することをさらに含む、請求項12記載の方法。
【請求項15】
前記チップたわみ信号の前記振幅および位相情報に基づき前記試料の前記表面と表面下を画像化することをさらに含む、請求項12記載の方法。
【請求項16】
原子間力顕微鏡法システムであって、
一端にチップを含むカンチレバーと、
前記チップにおいて振動を発生させるように前記カンチレバーを第1の周波数で振動させる加振装置と、
前記チップと試料表面との間の原子間力に基づいて前記チップの動作を検出する検出器と
を備え、
前記試料が前記第1の周波数とは異なる第2の高周波数励起により振動する、システム。
【請求項17】
前記カンチレバーチップの振動を共振周波数に維持するように構成された電子フィードバック回路をさらに備える、請求項16記載のシステム。
【請求項18】
前記電子フィードバック回路がMOSFETベースの電子読み取り回路を含む、請求項17記載のシステム。
【請求項19】
前記第1の周波数および前記第2の周波数が、それぞれ振幅変調されたキャリア周波数を含む、請求項16記載のシステム。
【請求項20】
前記第1および第2キャリア周波数を決定するために、積周波数、ビート周波数および加算周波数の少なくとも1つが用いられる、請求項19記載のシステム。
【請求項21】
前記カンチレバーが、前記チップと前記試料との間で接触の無い近接触モードで作動する、請求項16記載のシステム。
【請求項22】
近接触モードにある前記試料の観測に、ビート周波数、積周波数および周波数和の少なくとも1つが使用される、請求項21記載のシステム。
【請求項23】
前記ビート周波数、積周波数および周波数和の少なくとも1つを発生に、高調波および基本周波数の少なくとも1つが用いられる、請求項22記載のシステム。
【請求項24】
前記チップの前記動作が、前記試料中に埋め込まれたナノ構造、欠陥およびドーパントマッピングの少なくとも1つを確認するために用いられる、請求項16記載のシステム。
【請求項25】
前記第1の周波数の振動と、前記第2の周波数の振動とが混合されて混合音波信号を形成し、前記混合音波信号が電子的に処理され、前記混合音波信号の位相と振幅とに基づき前記試料の内部構造を決定する、請求項16記載のシステム。
【請求項26】
前記動作が前記チップと前記試料との間の線形相互作用を含む、請求項16記載のシステム。
【請求項27】
走査型近視野音響ホログラフィーシステムであって、
第1の高周波音波を試料の底部から発射するように構成された音波発生器と、
前記カンチレバーの基部からの第2の音波と
を備え、前記カンチレバーが一端にチップを含み、前記チップが音波信号から位相および振幅情報を受信するアンテナとして機能し、さらに、
前記第1および第2音波を混合して前記試料の表面および表面下を代表する積周波数、加算周波数および差周波数の少なくとも1つを発生することができる走査型近視野音響ホログラフィーモジュール(SNFUH)電子モジュールを備える、システム。
【請求項28】
前記電子モジュールが、前記第1および第2音波を維持するためのフィードバックを与えることができるフィードバック回路をさらに備える、請求項27記載のシステム。
【請求項29】
前記第1および第2の音波が基本共振周波数と、関連する高調波とを含む、請求項27記載のシステム。
【請求項30】
前記第1の音波が前記試料の表面下にある特徴物によって摂動される、請求項27記載のシステム。
【請求項31】
前記電子モジュールが前記第1の音波の摂動を検出し、前記試料の内部微細構造を表す波動摂動の描写を構成する、請求項30記載のシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公表番号】特表2009−511876(P2009−511876A)
【公表日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願番号】特願2008−534510(P2008−534510)
【出願日】平成17年10月6日(2005.10.6)
【国際出願番号】PCT/US2005/036194
【国際公開番号】WO2007/044002
【国際公開日】平成19年4月19日(2007.4.19)
【出願人】(508103872)ノースウエスタン ユニバーシティ (1)
【Fターム(参考)】
【公表日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願日】平成17年10月6日(2005.10.6)
【国際出願番号】PCT/US2005/036194
【国際公開番号】WO2007/044002
【国際公開日】平成19年4月19日(2007.4.19)
【出願人】(508103872)ノースウエスタン ユニバーシティ (1)
【Fターム(参考)】
[ Back to top ]