
走査型SQUID顕微鏡画像の高解像度化方法
【課題】
ピックアップコイルの線幅(コイル導体の幅)が原因して、高い空間解像度での測定ができない、といった不都合を解消ないし緩和した走査型SQUID顕微鏡(SSM)を提供する。
【解決手段】
ピックアップコイル113が無いときに面素片qjのうちコイル導体に対応する面素片を通り抜けていた磁束のうち、ピックアップコイル113があるためにコイル孔側に押しやられた磁束の、面素片qjを通り抜けていた磁束に対する程度を示す形状因子要素fjを各面素片qjについてそれぞれ求めることで、形状因子f、
f={fj|1≦j≦n,nおよびjは自然数} ・・・(1)
を算出し、この形状因子fを用いて、元の磁束分布画像を補正する。
ピックアップコイルの線幅(コイル導体の幅)が原因して、高い空間解像度での測定ができない、といった不都合を解消ないし緩和した走査型SQUID顕微鏡(SSM)を提供する。
【解決手段】
ピックアップコイル113が無いときに面素片qjのうちコイル導体に対応する面素片を通り抜けていた磁束のうち、ピックアップコイル113があるためにコイル孔側に押しやられた磁束の、面素片qjを通り抜けていた磁束に対する程度を示す形状因子要素fjを各面素片qjについてそれぞれ求めることで、形状因子f、
f={fj|1≦j≦n,nおよびjは自然数} ・・・(1)
を算出し、この形状因子fを用いて、元の磁束分布画像を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走査型SQUID顕微鏡のピックアップコイルの線幅(コイル導体の幅)が広いことに起因する測定精度低下を解消ないし緩和し、またさらにピックアップコイルの試料表面に対する傾斜による測定精度低下を解消ないし緩和することができる走査型SQUID顕微鏡画像の高解像度化方法に関する。
【背景技術】
【0002】
走査型SQUID顕微鏡(Scanning SQUID Microscope,以下、「SSM」と言うこともある)は、プローブを試料上でxy走査することで、局所的な磁束分布像を得ることができる装置である。
【0003】
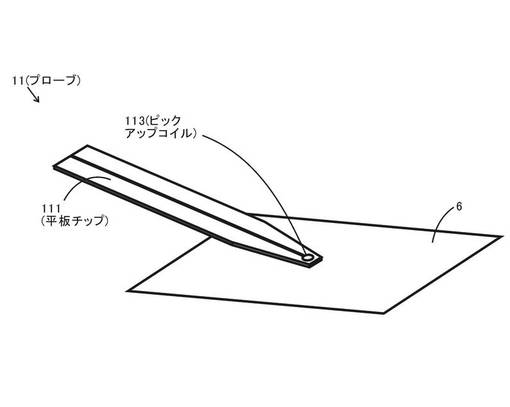
図3に示すように、カンチレバー型のプローブ11は、平面視が先細りに形成された平板チップ111を備え、先端には、ピックアップコイル113が形成されている。
試料6上の磁束分布の測定(さらには、試料6の表面上の磁束分布の測定)に際して、平板チップ111の先端を試料6の表面に傾斜角度θで接近または接触させて試料6表面の磁束分布を画像化する。
【0004】
プローブ11は、SSM顕微鏡の全体は、たとえば、液体ヘリウム内において、被検対象表面を走査する。その空間解像度(空間分解能)は、ピックアップコイル113の径に依存する。
ピックアップコイル113の径が、たとえば10μmである場合には、空間解像度はやはり10μm程度にとどまる。
特許文献1の技術(本願発明者の技術)では、コイルの形状因子と、SSM顕微鏡で得たデータを用いて、磁束分布を補正し、コイルの大きさよりも高い解像度で画像化する試みもなされている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−114104
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1の技術では、形状因子の特定をすることができない。このため、特許文献1の技術でも、SSMの空間解像度を、十分に高くすることができない。
また、特許文献1の技術では、ピックアップコイル113の試料表面に対する傾斜については考慮していない。このため、特許文献1の技術では、当該傾斜に起因して測定精度が低下する。
【0007】
本発明の目的は、ピックアップコイルの線幅(コイル導体の幅)が原因して、高い空間解像度での測定ができないといった不都合を解消ないし緩和した走査型SQUID顕微鏡(SSM)を提供することである。
本発明の他の目的は、ピックアップコイルが試料の表面に対して傾斜していることが原因して、測定精度が低下してしまうといった不都合を解消ないし緩和した走査型SQUID顕微鏡(SSM)を提供することである。
【0008】
発明者らは、SSMの空間分解能(空間解像度)を高くできない理由は、ピックアップコイルには線幅があり、また、ピックアップコイル自身がもともとの磁束分布を乱すからである、という事実に着目した。
そして、ピックアップコイルのコイル孔に磁束が集束される度合いを数式化し、これを形状因子として予め求めておき、この形状因子を用いてSSMの検出画像に補正処理を施せば、ピックアップコイルの線幅が広いことに起因する上記の問題を解消ないし緩和することができるとの知見のもと、本発明をなすに至った。
また、本発明者らは、ピックアップコイルが試料の表面に対して傾斜していることが、測定精度を低下させる一因になっており、これらに対する補正を行うことで、より精度が高い試料表面の磁束分布画像や電流分布画像を取得できるとの確信を得、当該補正にかかる技術を本発明に反映させている。
【課題を解決するための手段】
【0009】
本発明の走査型SQUID顕微鏡画像の高解像度化方法は、以下を要旨とする。
〔1〕
先端にピックアップコイルが形成されてなるプローブにより試料の表面を走査し、この走査により取得した前記試料の表面の磁束分布画像を高解像度化する走査型SQUID顕微鏡画像の高解像度化方法において、
ピックアップコイルを含む仮想面を設定し、前記仮想面を面素片qj(1≦j≦n,nおよびjは自然数)に分割し、
前記ピックアップコイルが無いときに面素片qjのうちコイル導体に対応する面素片を通り抜けていた磁束のうち、前記ピックアップコイルがあるためにコイル孔側に押しやられた磁束の、前記面素片qjを通り抜けていた磁束に対する程度を示す形状因子要素fjを前記各面素片qjについてそれぞれ求めることで、形状因子fを(1)式、
f={fj|1≦j≦n,nおよびjは自然数} ・・・(1)
により算出し、
前記形状因子fを、前記走査により取得された磁束分布に逆作用させることで、前記ピックアップコイルが無いときの磁束分布を得ることを特徴とする。
すなわち、走査により取得された磁束分布を行列[Φ]、ピックアップコイルが無いときの磁束分布を行列[Φ0]とし、形状因子を行列[F]としたときに、
[F][Φ0]=[Φ]
が成り立っている。したがって、
[Φ0]=[F]−1[Φ]
となる。
これは、走査により取得された磁束分布に形状因子を逆作用させることで、ピックアップコイルが無いときの磁束分布が取得できることを意味する。
たとえば、
前記磁束分布画像に係る磁束分布のフーリエ変換を求め、当該“磁束分布のフーリエ変換”に、前記形状因子を波数空間で表現した関数を乗算して、波数空間で表現した磁化を求め、これをフーリエ逆変換することで試料の表面上の磁化を得ることができる。
以上に述べたように、ピックアップコイルが無いときの磁束分布に形状因子fを作用させることで得られるべき磁束分布が、走査により取得された磁束分布であり、したがって、走査により取得された磁束分布画像に形状因子fを逆作用させることで、ピックアップコイルが無いときの磁束分布画像を得ることができる。
なお、(1)式に代えて、形状因子fを(1′)式、
f={fj|1≦j≦n,nおよびjは自然数かつpjは導体上の面素片} ・・・(1’)
により求めることができる。
【0010】
〔2〕
前記磁束分布画像とともに、または前記磁束分布画像に代えて電流分布画像を高解像度化することを特徴とする〔1〕に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【0011】
〔3〕
前記形状因子要素fjが(2)式、
fj=P{Yj+ΠΛ(−Yj)} ・・・(2)
Yj:面素片qjに仮想的に与えられた単位磁束であり、j番目の要素が「1」、それ以外の要素が「0」である縦行列(縦ベクトル)。
Λ:縦行列(−Yj)(Yjと逆向きの単位磁束)に作用し、前記面素片qjが前記コイル導体上にあるときは当該面素片qjを通り抜ける磁束の合計が「−1」、それ以外のコイル導体上の面素辺を通り抜ける磁束の合計が「0」となるように、前記コイル導体上にある前記各面素片qkを取り巻いて流れる各電流素回路ckに電流を割り当てる演算子。
Π:Λ(−Yj)で示される電流分布行列に作用し、各面素片qk(1≦k≦n,kは自然数)を取り巻くように流れる各電流素回路ckが、面素片qjにビオサバールの法則に従った磁束を作るための演算子。
具体的には、面素片qjの位置に作る磁束を、rkj(j≠k)を面素片qj,面素片pk間の距離として、
bkj=1/rkj3 ・・・(3)
とする行列。ただし、(j=k)のときは、
bjj=b0=−Σbkj(ただし、k≠j) ・・・(4)
P:Yj+ΠΛ(−Yj)に作用し、前記コイル孔では「1」,それ以外(コイル導体上およびコイルの外側)では「0」となる行列であって、前記コイル孔側に押しやられた磁束分布を抽出するための演算子。
により表されることを特徴とする〔1〕に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【0012】
〔4〕
試料の表面に対するピックアップコイルを含む仮想面の傾斜角がθ(0≦θ<90°)である走査型SQUID顕微鏡画像の高解像度化方法であって、
波数空間で表現した磁化が、
【数1】

・・・(5)
で表され、当該波数空間で表現した磁化のフーリエ逆変換が、
【数2】
で表されることを特徴とする〔1〕から〔3〕の何れか1つに記載の走査型SQUID顕微鏡画像の高解像度化方法。
【発明の効果】
【0013】
適正な形状因子を求めることができる。すなわち、ピックアップコイルのコイル導体の位置に在ったはずの磁束が、どの程度ピックアップコイルの内側に入り込むかを高い精度で知ることができる。
そして、この形状因子を利用して、試料の表面の低解像度の磁束分布画像を高解像度化することができる。
高解像度化の演算式に、試料の表面に対するピックアップコイルの傾斜を、パラメータとして取り入れることにより、当該傾斜に起因する、走査型SQUID顕微鏡の測定精度低下を緩和することができる。
【図面の簡単な説明】
【0014】
【図1】高解像度化方法の実施に使用する走査型SQUID顕微鏡のカンチレバー型プローブの模式図である。
【図2】本実施形態での基本的な処理の流れを示す説明図である。
【図3】平板チップの先端を試料の表面に接近または接触させてピックアップコイルが磁束を検出する様子を示す図である。
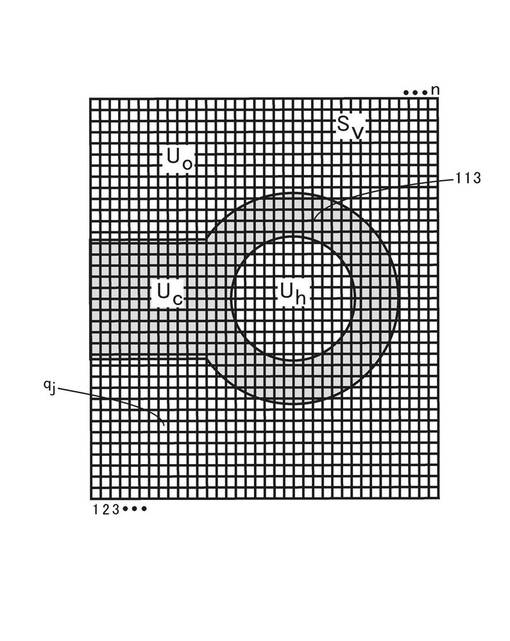
【図4】x′y′座標系に定義された、ピックアップコイルの内側の領域Uh、外側の領域Uoおよびピックアップコイルのパターンに重なる領域Ucを示す説明図である。
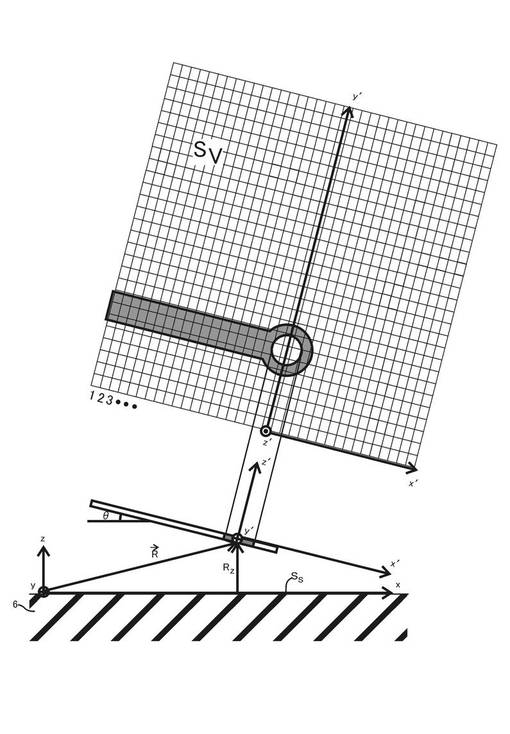
【図5】試料の表面をxy平面に持つxy座標系と、平板チップのピックアップコイルの形成面をx′y′平面に持つx′y′座標系との関係を示す図である。
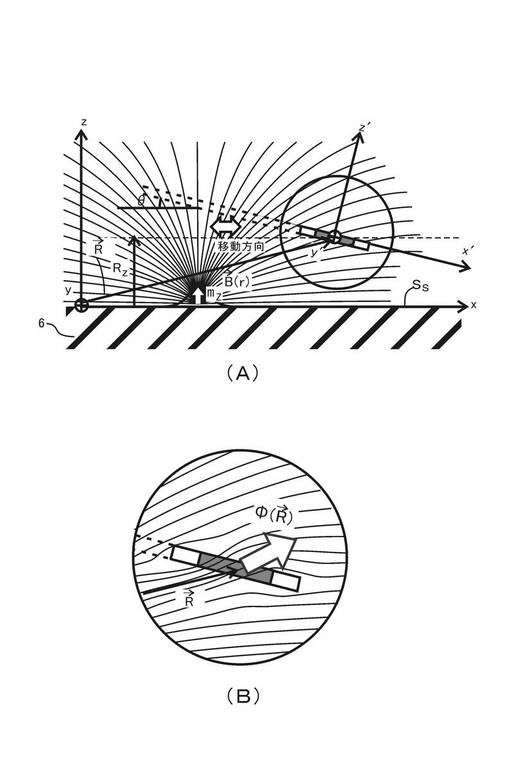
【図6】本発明の作用を説明するための図であり、(A)試料の表面の磁化により生じた磁束がピックアップコイルを突き抜ける様子を示す図、(B)はピックアップコイルの拡大図である。
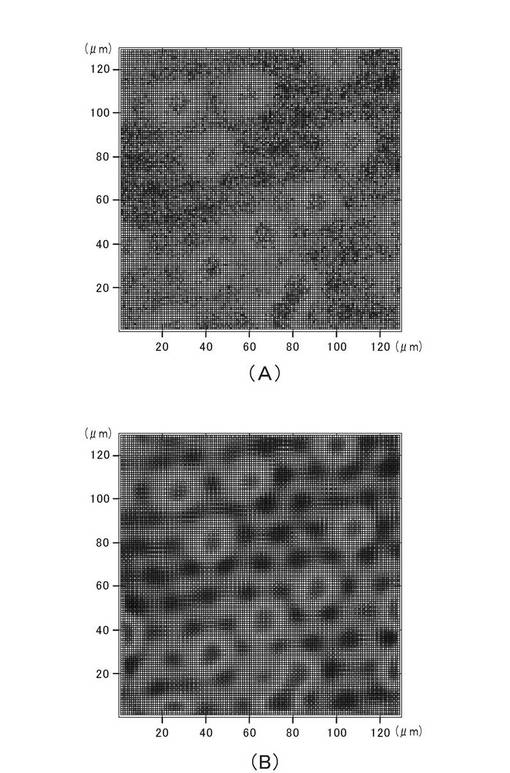
【図7】(A)はSQUID顕微鏡によりハネカム格子状超伝導体の磁束分布を観測したときの磁束分布画像(高解像度化処理前の画像)、(B)は(A)の磁束分布画像に本発明の高解像度化処理を施した磁束分布画像である。
【発明を実施するための形態】
【0015】
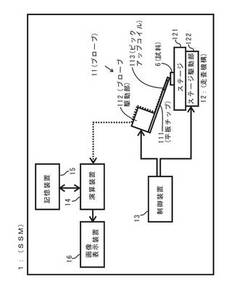
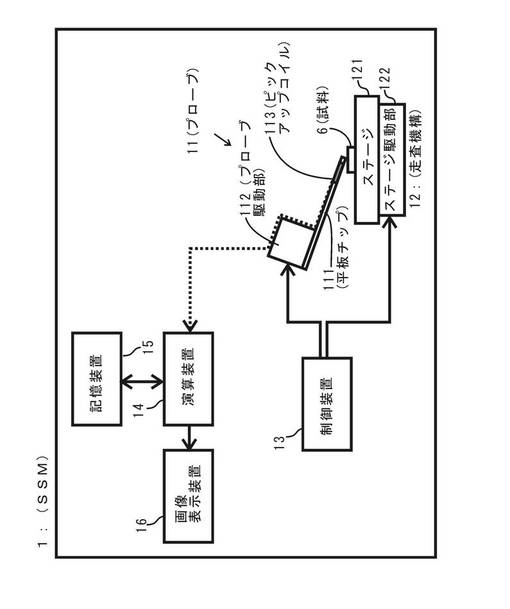
図1は、走査型SQUID顕微鏡の模式図である。図1において、SSM(走査型SQUID顕微鏡)1は、プローブ11と、走査機構12と、制御装置13と、演算装置14と、記憶装置15と、画像表示装置16とからなる。
【0016】
プローブ11は、図3の斜視図にも示したようにカンチレバー型であり、平板チップ111と、プローブ駆動部112と、ピックアップコイル113とからなる。
平板チップ111は、平面視が先細りに形成されており、表面先端には、ピックアップコイル113が形成されている。プローブ駆動部112はピエゾ素子からなり平板チップ111を空間制御することができる。ピックアップコイル113は、本実施形態では円形であり平板チップ111の表面に幅広に形成されている(図3の斜視図参照)。
本発明では、ピックアップコイル113の形状は円形に限定されず、多角形、楕円等の円形以外であっても本発明の効果が奏される。
【0017】
走査機構12は、試料6がセットされるステージ121と、ステージ駆動機構122とからなる。本実施形態では、ステージ駆動機構122はステージ121を、xy駆動することができる。
【0018】
制御装置13は、測定に際して、平板チップ111の先端を、試料6の表面SSに傾斜角度θで接触させる。傾斜角度θは、試料6の表面SSと、平板チップ111の先端のコイル導体が作る面とがなす角(2つの面の法線がなす角)である。
制御装置13は、ステージ駆動機構122に走査制御信号を送出して、後述するようにxy駆動させることで、ピックアップコイル113による走査が行われる。
【0019】
演算装置14は、ピックアップコイル113による走査に際して、当該ピックアップコイル113から信号(電流検出信号)を受け取り、後に詳述するように、試料6の表面SSの磁束分布を求める。
【0020】
記憶装置15は、演算装置14による演算に必要なプログラムのほか、高解像度化処理がなされる前の磁束分布画像データ、高解像度化処理がなされた後の磁束分布画像データ、形状因子等を記憶することができる。
【0021】
画像表示装置16は、高解像度化処理をした走査型SQUID顕微鏡(SSM1)の磁束分布画像データを受け取り、ディスプレイに磁束分布画像を表示することができる。
【0022】
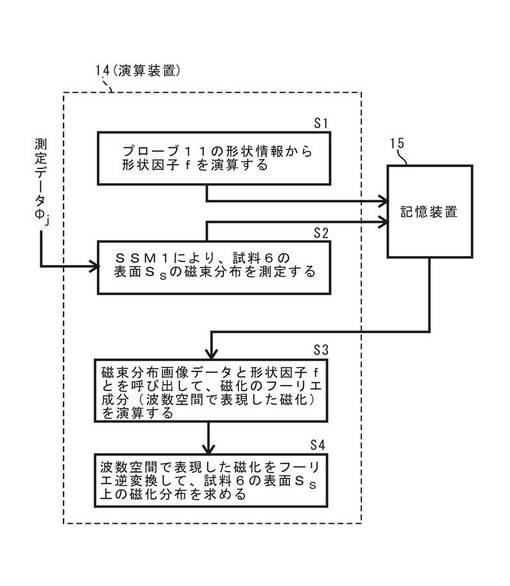
以下、本発明の走査型SQUID顕微鏡画像の高解像度化方法の基本的な処理の流れを図2により説明する。
本発明の走査型SQUID顕微鏡画像の高解像度化方法における処理では、以下のステップS1,S2,S3,S4が実行される。
ステップS1では、プローブ11の形状情報から形状因子fを演算する。
ステップS2では、SSM1により、試料6の表面SSの磁束分布を測定する。
ステップS3では、磁束分布画像の数値データと形状因子fとを呼び出して、磁化のフーリエ成分(波数空間で表現した磁化)を演算する。
ステップS4では、波数空間で表現した磁化をフーリエ逆変換して、試料6の表面SS上の磁化分布を求める。
【0023】
《ステップS1》
ステップS1では、プローブ11の形状情報から形状因子fを演算する(ステップS1)。この演算は、演算装置14または別途用意されたコンピュータを用いて行うことができる。本実施形態では、この演算に際して、ピックアップコイルの試料6の表面SSに対する傾斜θをパラメータとして取り込んでいる。求めた形状因子fは、記憶装置15に記憶しておく。
形状因子fは、
f={fj|1≦j≦n,nおよびjは自然数}
で表される。fjは形状因子要素であり、次のように表される。
fj=P{Yj+ΠΛ(−Yj)}
【0024】
図4は、試料6の表面SSをxy平面に持つxy座標系と、平板チップ111のピックアップコイル113の形成面をx′y′平面に持つx′y′座標系との関係を示す図である。
本実施形態では、図4に示すように、試料6を含む面(xy平面)を面素片に分割する。そして、ピックアップコイル113を含む仮想面SV(x′y′平面)を面素片に分割し、面素片に連続番号j(1≦j≦n,nおよびjは自然数)を付し、qjで記す。
また、本実施形態では、図4に示すように、x′y′座標系の領域を、ピックアップコイル113の内側の領域Uh、外側の領域Uoおよびピックアップコイル113のパターンに重なる領域Uc(コイル導体)分けて定義する。
【0025】
まず、j番目の要素が「1」、それ以外の要素が「0」である縦行列(縦ベクトル)Yjをx′y′平面(仮想面SV)上に定義する。これは、面素片qjに仮想的に単位磁束が与えることを意味する。
【0026】
次に、演算子Λを縦行列(−Yj)(Yjと逆向きの単位磁束)に作用させる。
演算子Λは、面素片qjが領域Ucにあるとき(コイル導体上にあるとき)は、この面素片qjを通り抜ける磁束の合計が「−1」、それ以外のコイル導体上の面素辺を通り抜ける磁束の合計が「0」となるように、領域Uc(コイル導体上)にある各面素片qkを取り巻いて流れる各電流素回路ckに電流を割り当てる。
【0027】
さらに、演算子Πを、Λ(−Yj)で示される電流分布行列に作用させる。
演算子Πは、各面素片qk(1≦k≦n,kは自然数)を取り巻くように流れる各電流素回路ckが、面素片qjにビオサバールの法則に従った磁束を作るための演算子である。
【0028】
具体的には、演算子Πは、面素片qjの位置に作る磁束を、rkj(j≠k)を面素片qj,面素片pk間の距離として、行列要素bkjを、
bkj=1/rkj3
とする行列である。
ただし、(j=k)のときは、
bjj=b0
である。これらbjkは、以下の条件が成立するように選ばれる。
Σbjk=b1k+b2k+・・・+bkk+・・・+bnk=0
【0029】
ピックアップコイルがないときの磁束が、もともと「1」で与えられとしているので、ピックアップコイルの外に押しやられた磁束は、Yj+ΠΛ(−Yj)、すなわち、Eを単位行列として、
(E−ΠΛ)Yj
で表される。
【0030】
次に、演算子Pを、Yj+ΠΛ(−Yj)、すなわち、
(E−ΠΛ)Yj
に作用させる。
P(E−ΠΛ)Yj
Pは、コイル孔では「1」,それ以外(コイル導体上およびコイルの外側)では「0」となる行列であって、コイル孔側に押しやられた磁束分布を抽出することができる。
【0031】
以上のようにして、ピックアップコイル113が無いときに面素片qjを通り抜けていた磁束Φjのうち、ピックアップコイル113があるために領域Uc側(コイル孔側)に押しやられた磁束の割合を示す形状因子要素fjを面素片qjについてそれぞれ求めることができる。
形状因子fは、
f={fj|1≦j≦n,nおよびjは自然数}
で表すことができる。
【0032】
《ステップS2》
前述したように、ステップS2では、SSM1では、制御装置13は、走査機構12を走査しつつ、プローブ11により試料6の表面SSの磁束分布を測定する。
そして、演算装置14は、試料6についての磁束分布の測定結果から、磁束分布画像の数値データを生成して記憶装置15に記憶する。なお、ステップS2の処理は、ステップS1の処理の後に行ってもよいし、ステップS1の処理よりも前に行ってもよい。
【0033】
本発明の高解像度化方法では、高解像度の磁束分布画像を求めるために、種々の計算手法を適用することができる。以下に高速フーリエ変換(FFT)による計算処理の概略を示す。FFTによる処理を行うことで計算量を大幅に減らすことができる。
【0034】
図5に、試料の表面をxy平面に持つxy座標系と、平板チップのピックアップコイルの形成面をx′y′平面に持つx′y′座標系との関係を示す。
また、図6(A)に試料の表面の磁化により生じた磁束がピックアップコイルを突き抜ける様子を示し、図6(B)にピックアップコイルを拡大して示す。
図5および図6(A),(B)に示すように、本実施形態では、試料6の表面SSをxy平面とするxyz空間座標系を定義するとともに、ピックアップコイルを含む仮想面SVをx′y′平面とするx′y′z′空間座標系を定義する。
【0035】
試料6の表面SSの磁化をmz(x,y)とすると、mz(x,y)は(A−1)式で示される。
【数3】
【0036】
(A−1)式の磁化mz(x,y)のフーリエ変換は、(A−2)式で表される。
【数4】
【0037】
また、xyz空間での磁束密度は(A−3)式で表される。
【数5】
【0038】
(A−3)式の磁束密度は以下のようにして求められる。
電流密度が(A−4)式で表されるとする。
【数6】
【0039】
ベクトルezは、(A−5)式で表される。
【数7】
【0040】
ビオ・サバールの法則により、実空間での磁束密度は(A−6)式で表される。
【数8】
【0041】
sgn(z),k⊥を、(A−7),(A−8)式で定義する。
【数9】
【数10】
【0042】
波数ベクトル空間での磁束密度は、フーリエ変換を用いて、(A−9)式で表される。
【数11】
【0043】
つぎに、磁束密度((A−9))と、磁束Φとの関係を示す。
磁束Φを(A−10),(A−11)式で定義する。
【数12】
【数13】
【0044】
(A−10)式の磁束は(A−12)式で表される。
【数14】
【0045】
(A−12)式において、
【数15】
である。
【0046】
(A−12)式において、
【数16】
である。(A−14)式は、ピックアップコイルを含む仮想面SV上の座標(x′,y′)を持つ点の、xyz空間座標系での位置を表している。
【0047】
具体的には、(A−15)式で表される。
【数17】
【0048】
(A−10)式において、f(x′,y′)は、ピックアップコイルの形状因子である。
(A−10)式の磁束は、波数ベクトル空間では、フーリエ変換を用いて、(A−16),(A−17)式で表される。
【数18】
【数19】
【0049】
波数ベクトル空間での磁束の二次元での、フーリエ変換は(A−18),(A−19)式で表される。
【数20】
【数21】
(A−19)式は、ピックコイル113により測定された磁束を表している。
【0050】
《ステップS3》
ステップS3では、演算装置14は、記憶装置15から磁束分布画像の数値データ(すなわち、(A−19)式で表される磁束)とステップS1で求めてある形状因子fとを呼び出し、波数空間で表現した磁化を求める。
【数22】
である。
F(k⊥)は、形状因子fを波数空間で表現した関数である。
【0051】
(A−20)式を変形すると、(A−21)式、すなわち波数空間で表現した磁化となる。
【数23】
【0052】
《ステップS4》
ステップS4では、前述したように演算装置14により、上記の波数空間で表現した磁化をフーリエ逆変換して試料6の表面SSでの磁化分布を求める。
(A−21)式を、フーリエ逆変換すると、(A−22)式となる。
【0053】
【数24】
【0054】
(A−22)式は、試料6の表面SSでの磁化分布を表しており、この式から表面SSの電流分布を求めることもできる。これにより、ステップS2で取得した磁束分布画像を高解像度化することができる。
【0055】
SQUID顕微鏡によりハネカム格子状超伝導体の磁束分布を観測したときの、磁束分布画像(高解像度化処理前の画像)を図7(A)に示す。
図7(A)の磁束分布画像に本発明の高解像度化処理を施した磁束分布画像を図7(B)に示す。
図7(A)の磁束分布画像では、格子の存在すら認識することは難しいが、図7(B)の磁束分布画像からはハネカム格子の存在を認識することができるし、どのハネカム格子セルに渦電流(量子渦)が多く流れているかも認識することができる。
【符号の説明】
【0056】
1 SSM(走査型SQUID顕微鏡)
6 試料
11 プローブ
12 走査機構
13 制御装置
14 演算装置
15 記憶装置
16 画像表示装置
111 平板チップ
112 プローブ駆動部
113 ピックアップコイル
121 ステージ
122 ステージ駆動機構
SS 試料の表面
SV 仮想面
qj 面素片
cj 電流素回路
Φ,Φj 磁束
【技術分野】
【0001】
本発明は、走査型SQUID顕微鏡のピックアップコイルの線幅(コイル導体の幅)が広いことに起因する測定精度低下を解消ないし緩和し、またさらにピックアップコイルの試料表面に対する傾斜による測定精度低下を解消ないし緩和することができる走査型SQUID顕微鏡画像の高解像度化方法に関する。
【背景技術】
【0002】
走査型SQUID顕微鏡(Scanning SQUID Microscope,以下、「SSM」と言うこともある)は、プローブを試料上でxy走査することで、局所的な磁束分布像を得ることができる装置である。
【0003】
図3に示すように、カンチレバー型のプローブ11は、平面視が先細りに形成された平板チップ111を備え、先端には、ピックアップコイル113が形成されている。
試料6上の磁束分布の測定(さらには、試料6の表面上の磁束分布の測定)に際して、平板チップ111の先端を試料6の表面に傾斜角度θで接近または接触させて試料6表面の磁束分布を画像化する。
【0004】
プローブ11は、SSM顕微鏡の全体は、たとえば、液体ヘリウム内において、被検対象表面を走査する。その空間解像度(空間分解能)は、ピックアップコイル113の径に依存する。
ピックアップコイル113の径が、たとえば10μmである場合には、空間解像度はやはり10μm程度にとどまる。
特許文献1の技術(本願発明者の技術)では、コイルの形状因子と、SSM顕微鏡で得たデータを用いて、磁束分布を補正し、コイルの大きさよりも高い解像度で画像化する試みもなされている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−114104
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1の技術では、形状因子の特定をすることができない。このため、特許文献1の技術でも、SSMの空間解像度を、十分に高くすることができない。
また、特許文献1の技術では、ピックアップコイル113の試料表面に対する傾斜については考慮していない。このため、特許文献1の技術では、当該傾斜に起因して測定精度が低下する。
【0007】
本発明の目的は、ピックアップコイルの線幅(コイル導体の幅)が原因して、高い空間解像度での測定ができないといった不都合を解消ないし緩和した走査型SQUID顕微鏡(SSM)を提供することである。
本発明の他の目的は、ピックアップコイルが試料の表面に対して傾斜していることが原因して、測定精度が低下してしまうといった不都合を解消ないし緩和した走査型SQUID顕微鏡(SSM)を提供することである。
【0008】
発明者らは、SSMの空間分解能(空間解像度)を高くできない理由は、ピックアップコイルには線幅があり、また、ピックアップコイル自身がもともとの磁束分布を乱すからである、という事実に着目した。
そして、ピックアップコイルのコイル孔に磁束が集束される度合いを数式化し、これを形状因子として予め求めておき、この形状因子を用いてSSMの検出画像に補正処理を施せば、ピックアップコイルの線幅が広いことに起因する上記の問題を解消ないし緩和することができるとの知見のもと、本発明をなすに至った。
また、本発明者らは、ピックアップコイルが試料の表面に対して傾斜していることが、測定精度を低下させる一因になっており、これらに対する補正を行うことで、より精度が高い試料表面の磁束分布画像や電流分布画像を取得できるとの確信を得、当該補正にかかる技術を本発明に反映させている。
【課題を解決するための手段】
【0009】
本発明の走査型SQUID顕微鏡画像の高解像度化方法は、以下を要旨とする。
〔1〕
先端にピックアップコイルが形成されてなるプローブにより試料の表面を走査し、この走査により取得した前記試料の表面の磁束分布画像を高解像度化する走査型SQUID顕微鏡画像の高解像度化方法において、
ピックアップコイルを含む仮想面を設定し、前記仮想面を面素片qj(1≦j≦n,nおよびjは自然数)に分割し、
前記ピックアップコイルが無いときに面素片qjのうちコイル導体に対応する面素片を通り抜けていた磁束のうち、前記ピックアップコイルがあるためにコイル孔側に押しやられた磁束の、前記面素片qjを通り抜けていた磁束に対する程度を示す形状因子要素fjを前記各面素片qjについてそれぞれ求めることで、形状因子fを(1)式、
f={fj|1≦j≦n,nおよびjは自然数} ・・・(1)
により算出し、
前記形状因子fを、前記走査により取得された磁束分布に逆作用させることで、前記ピックアップコイルが無いときの磁束分布を得ることを特徴とする。
すなわち、走査により取得された磁束分布を行列[Φ]、ピックアップコイルが無いときの磁束分布を行列[Φ0]とし、形状因子を行列[F]としたときに、
[F][Φ0]=[Φ]
が成り立っている。したがって、
[Φ0]=[F]−1[Φ]
となる。
これは、走査により取得された磁束分布に形状因子を逆作用させることで、ピックアップコイルが無いときの磁束分布が取得できることを意味する。
たとえば、
前記磁束分布画像に係る磁束分布のフーリエ変換を求め、当該“磁束分布のフーリエ変換”に、前記形状因子を波数空間で表現した関数を乗算して、波数空間で表現した磁化を求め、これをフーリエ逆変換することで試料の表面上の磁化を得ることができる。
以上に述べたように、ピックアップコイルが無いときの磁束分布に形状因子fを作用させることで得られるべき磁束分布が、走査により取得された磁束分布であり、したがって、走査により取得された磁束分布画像に形状因子fを逆作用させることで、ピックアップコイルが無いときの磁束分布画像を得ることができる。
なお、(1)式に代えて、形状因子fを(1′)式、
f={fj|1≦j≦n,nおよびjは自然数かつpjは導体上の面素片} ・・・(1’)
により求めることができる。
【0010】
〔2〕
前記磁束分布画像とともに、または前記磁束分布画像に代えて電流分布画像を高解像度化することを特徴とする〔1〕に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【0011】
〔3〕
前記形状因子要素fjが(2)式、
fj=P{Yj+ΠΛ(−Yj)} ・・・(2)
Yj:面素片qjに仮想的に与えられた単位磁束であり、j番目の要素が「1」、それ以外の要素が「0」である縦行列(縦ベクトル)。
Λ:縦行列(−Yj)(Yjと逆向きの単位磁束)に作用し、前記面素片qjが前記コイル導体上にあるときは当該面素片qjを通り抜ける磁束の合計が「−1」、それ以外のコイル導体上の面素辺を通り抜ける磁束の合計が「0」となるように、前記コイル導体上にある前記各面素片qkを取り巻いて流れる各電流素回路ckに電流を割り当てる演算子。
Π:Λ(−Yj)で示される電流分布行列に作用し、各面素片qk(1≦k≦n,kは自然数)を取り巻くように流れる各電流素回路ckが、面素片qjにビオサバールの法則に従った磁束を作るための演算子。
具体的には、面素片qjの位置に作る磁束を、rkj(j≠k)を面素片qj,面素片pk間の距離として、
bkj=1/rkj3 ・・・(3)
とする行列。ただし、(j=k)のときは、
bjj=b0=−Σbkj(ただし、k≠j) ・・・(4)
P:Yj+ΠΛ(−Yj)に作用し、前記コイル孔では「1」,それ以外(コイル導体上およびコイルの外側)では「0」となる行列であって、前記コイル孔側に押しやられた磁束分布を抽出するための演算子。
により表されることを特徴とする〔1〕に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【0012】
〔4〕
試料の表面に対するピックアップコイルを含む仮想面の傾斜角がθ(0≦θ<90°)である走査型SQUID顕微鏡画像の高解像度化方法であって、
波数空間で表現した磁化が、
【数1】
・・・(5)
で表され、当該波数空間で表現した磁化のフーリエ逆変換が、
【数2】
で表されることを特徴とする〔1〕から〔3〕の何れか1つに記載の走査型SQUID顕微鏡画像の高解像度化方法。
【発明の効果】
【0013】
適正な形状因子を求めることができる。すなわち、ピックアップコイルのコイル導体の位置に在ったはずの磁束が、どの程度ピックアップコイルの内側に入り込むかを高い精度で知ることができる。
そして、この形状因子を利用して、試料の表面の低解像度の磁束分布画像を高解像度化することができる。
高解像度化の演算式に、試料の表面に対するピックアップコイルの傾斜を、パラメータとして取り入れることにより、当該傾斜に起因する、走査型SQUID顕微鏡の測定精度低下を緩和することができる。
【図面の簡単な説明】
【0014】
【図1】高解像度化方法の実施に使用する走査型SQUID顕微鏡のカンチレバー型プローブの模式図である。
【図2】本実施形態での基本的な処理の流れを示す説明図である。
【図3】平板チップの先端を試料の表面に接近または接触させてピックアップコイルが磁束を検出する様子を示す図である。
【図4】x′y′座標系に定義された、ピックアップコイルの内側の領域Uh、外側の領域Uoおよびピックアップコイルのパターンに重なる領域Ucを示す説明図である。
【図5】試料の表面をxy平面に持つxy座標系と、平板チップのピックアップコイルの形成面をx′y′平面に持つx′y′座標系との関係を示す図である。
【図6】本発明の作用を説明するための図であり、(A)試料の表面の磁化により生じた磁束がピックアップコイルを突き抜ける様子を示す図、(B)はピックアップコイルの拡大図である。
【図7】(A)はSQUID顕微鏡によりハネカム格子状超伝導体の磁束分布を観測したときの磁束分布画像(高解像度化処理前の画像)、(B)は(A)の磁束分布画像に本発明の高解像度化処理を施した磁束分布画像である。
【発明を実施するための形態】
【0015】
図1は、走査型SQUID顕微鏡の模式図である。図1において、SSM(走査型SQUID顕微鏡)1は、プローブ11と、走査機構12と、制御装置13と、演算装置14と、記憶装置15と、画像表示装置16とからなる。
【0016】
プローブ11は、図3の斜視図にも示したようにカンチレバー型であり、平板チップ111と、プローブ駆動部112と、ピックアップコイル113とからなる。
平板チップ111は、平面視が先細りに形成されており、表面先端には、ピックアップコイル113が形成されている。プローブ駆動部112はピエゾ素子からなり平板チップ111を空間制御することができる。ピックアップコイル113は、本実施形態では円形であり平板チップ111の表面に幅広に形成されている(図3の斜視図参照)。
本発明では、ピックアップコイル113の形状は円形に限定されず、多角形、楕円等の円形以外であっても本発明の効果が奏される。
【0017】
走査機構12は、試料6がセットされるステージ121と、ステージ駆動機構122とからなる。本実施形態では、ステージ駆動機構122はステージ121を、xy駆動することができる。
【0018】
制御装置13は、測定に際して、平板チップ111の先端を、試料6の表面SSに傾斜角度θで接触させる。傾斜角度θは、試料6の表面SSと、平板チップ111の先端のコイル導体が作る面とがなす角(2つの面の法線がなす角)である。
制御装置13は、ステージ駆動機構122に走査制御信号を送出して、後述するようにxy駆動させることで、ピックアップコイル113による走査が行われる。
【0019】
演算装置14は、ピックアップコイル113による走査に際して、当該ピックアップコイル113から信号(電流検出信号)を受け取り、後に詳述するように、試料6の表面SSの磁束分布を求める。
【0020】
記憶装置15は、演算装置14による演算に必要なプログラムのほか、高解像度化処理がなされる前の磁束分布画像データ、高解像度化処理がなされた後の磁束分布画像データ、形状因子等を記憶することができる。
【0021】
画像表示装置16は、高解像度化処理をした走査型SQUID顕微鏡(SSM1)の磁束分布画像データを受け取り、ディスプレイに磁束分布画像を表示することができる。
【0022】
以下、本発明の走査型SQUID顕微鏡画像の高解像度化方法の基本的な処理の流れを図2により説明する。
本発明の走査型SQUID顕微鏡画像の高解像度化方法における処理では、以下のステップS1,S2,S3,S4が実行される。
ステップS1では、プローブ11の形状情報から形状因子fを演算する。
ステップS2では、SSM1により、試料6の表面SSの磁束分布を測定する。
ステップS3では、磁束分布画像の数値データと形状因子fとを呼び出して、磁化のフーリエ成分(波数空間で表現した磁化)を演算する。
ステップS4では、波数空間で表現した磁化をフーリエ逆変換して、試料6の表面SS上の磁化分布を求める。
【0023】
《ステップS1》
ステップS1では、プローブ11の形状情報から形状因子fを演算する(ステップS1)。この演算は、演算装置14または別途用意されたコンピュータを用いて行うことができる。本実施形態では、この演算に際して、ピックアップコイルの試料6の表面SSに対する傾斜θをパラメータとして取り込んでいる。求めた形状因子fは、記憶装置15に記憶しておく。
形状因子fは、
f={fj|1≦j≦n,nおよびjは自然数}
で表される。fjは形状因子要素であり、次のように表される。
fj=P{Yj+ΠΛ(−Yj)}
【0024】
図4は、試料6の表面SSをxy平面に持つxy座標系と、平板チップ111のピックアップコイル113の形成面をx′y′平面に持つx′y′座標系との関係を示す図である。
本実施形態では、図4に示すように、試料6を含む面(xy平面)を面素片に分割する。そして、ピックアップコイル113を含む仮想面SV(x′y′平面)を面素片に分割し、面素片に連続番号j(1≦j≦n,nおよびjは自然数)を付し、qjで記す。
また、本実施形態では、図4に示すように、x′y′座標系の領域を、ピックアップコイル113の内側の領域Uh、外側の領域Uoおよびピックアップコイル113のパターンに重なる領域Uc(コイル導体)分けて定義する。
【0025】
まず、j番目の要素が「1」、それ以外の要素が「0」である縦行列(縦ベクトル)Yjをx′y′平面(仮想面SV)上に定義する。これは、面素片qjに仮想的に単位磁束が与えることを意味する。
【0026】
次に、演算子Λを縦行列(−Yj)(Yjと逆向きの単位磁束)に作用させる。
演算子Λは、面素片qjが領域Ucにあるとき(コイル導体上にあるとき)は、この面素片qjを通り抜ける磁束の合計が「−1」、それ以外のコイル導体上の面素辺を通り抜ける磁束の合計が「0」となるように、領域Uc(コイル導体上)にある各面素片qkを取り巻いて流れる各電流素回路ckに電流を割り当てる。
【0027】
さらに、演算子Πを、Λ(−Yj)で示される電流分布行列に作用させる。
演算子Πは、各面素片qk(1≦k≦n,kは自然数)を取り巻くように流れる各電流素回路ckが、面素片qjにビオサバールの法則に従った磁束を作るための演算子である。
【0028】
具体的には、演算子Πは、面素片qjの位置に作る磁束を、rkj(j≠k)を面素片qj,面素片pk間の距離として、行列要素bkjを、
bkj=1/rkj3
とする行列である。
ただし、(j=k)のときは、
bjj=b0
である。これらbjkは、以下の条件が成立するように選ばれる。
Σbjk=b1k+b2k+・・・+bkk+・・・+bnk=0
【0029】
ピックアップコイルがないときの磁束が、もともと「1」で与えられとしているので、ピックアップコイルの外に押しやられた磁束は、Yj+ΠΛ(−Yj)、すなわち、Eを単位行列として、
(E−ΠΛ)Yj
で表される。
【0030】
次に、演算子Pを、Yj+ΠΛ(−Yj)、すなわち、
(E−ΠΛ)Yj
に作用させる。
P(E−ΠΛ)Yj
Pは、コイル孔では「1」,それ以外(コイル導体上およびコイルの外側)では「0」となる行列であって、コイル孔側に押しやられた磁束分布を抽出することができる。
【0031】
以上のようにして、ピックアップコイル113が無いときに面素片qjを通り抜けていた磁束Φjのうち、ピックアップコイル113があるために領域Uc側(コイル孔側)に押しやられた磁束の割合を示す形状因子要素fjを面素片qjについてそれぞれ求めることができる。
形状因子fは、
f={fj|1≦j≦n,nおよびjは自然数}
で表すことができる。
【0032】
《ステップS2》
前述したように、ステップS2では、SSM1では、制御装置13は、走査機構12を走査しつつ、プローブ11により試料6の表面SSの磁束分布を測定する。
そして、演算装置14は、試料6についての磁束分布の測定結果から、磁束分布画像の数値データを生成して記憶装置15に記憶する。なお、ステップS2の処理は、ステップS1の処理の後に行ってもよいし、ステップS1の処理よりも前に行ってもよい。
【0033】
本発明の高解像度化方法では、高解像度の磁束分布画像を求めるために、種々の計算手法を適用することができる。以下に高速フーリエ変換(FFT)による計算処理の概略を示す。FFTによる処理を行うことで計算量を大幅に減らすことができる。
【0034】
図5に、試料の表面をxy平面に持つxy座標系と、平板チップのピックアップコイルの形成面をx′y′平面に持つx′y′座標系との関係を示す。
また、図6(A)に試料の表面の磁化により生じた磁束がピックアップコイルを突き抜ける様子を示し、図6(B)にピックアップコイルを拡大して示す。
図5および図6(A),(B)に示すように、本実施形態では、試料6の表面SSをxy平面とするxyz空間座標系を定義するとともに、ピックアップコイルを含む仮想面SVをx′y′平面とするx′y′z′空間座標系を定義する。
【0035】
試料6の表面SSの磁化をmz(x,y)とすると、mz(x,y)は(A−1)式で示される。
【数3】
【0036】
(A−1)式の磁化mz(x,y)のフーリエ変換は、(A−2)式で表される。
【数4】
【0037】
また、xyz空間での磁束密度は(A−3)式で表される。
【数5】
【0038】
(A−3)式の磁束密度は以下のようにして求められる。
電流密度が(A−4)式で表されるとする。
【数6】
【0039】
ベクトルezは、(A−5)式で表される。
【数7】
【0040】
ビオ・サバールの法則により、実空間での磁束密度は(A−6)式で表される。
【数8】
【0041】
sgn(z),k⊥を、(A−7),(A−8)式で定義する。
【数9】
【数10】
【0042】
波数ベクトル空間での磁束密度は、フーリエ変換を用いて、(A−9)式で表される。
【数11】
【0043】
つぎに、磁束密度((A−9))と、磁束Φとの関係を示す。
磁束Φを(A−10),(A−11)式で定義する。
【数12】
【数13】
【0044】
(A−10)式の磁束は(A−12)式で表される。
【数14】
【0045】
(A−12)式において、
【数15】
である。
【0046】
(A−12)式において、
【数16】
である。(A−14)式は、ピックアップコイルを含む仮想面SV上の座標(x′,y′)を持つ点の、xyz空間座標系での位置を表している。
【0047】
具体的には、(A−15)式で表される。
【数17】
【0048】
(A−10)式において、f(x′,y′)は、ピックアップコイルの形状因子である。
(A−10)式の磁束は、波数ベクトル空間では、フーリエ変換を用いて、(A−16),(A−17)式で表される。
【数18】
【数19】
【0049】
波数ベクトル空間での磁束の二次元での、フーリエ変換は(A−18),(A−19)式で表される。
【数20】
【数21】
(A−19)式は、ピックコイル113により測定された磁束を表している。
【0050】
《ステップS3》
ステップS3では、演算装置14は、記憶装置15から磁束分布画像の数値データ(すなわち、(A−19)式で表される磁束)とステップS1で求めてある形状因子fとを呼び出し、波数空間で表現した磁化を求める。
【数22】
である。
F(k⊥)は、形状因子fを波数空間で表現した関数である。
【0051】
(A−20)式を変形すると、(A−21)式、すなわち波数空間で表現した磁化となる。
【数23】
【0052】
《ステップS4》
ステップS4では、前述したように演算装置14により、上記の波数空間で表現した磁化をフーリエ逆変換して試料6の表面SSでの磁化分布を求める。
(A−21)式を、フーリエ逆変換すると、(A−22)式となる。
【0053】
【数24】
【0054】
(A−22)式は、試料6の表面SSでの磁化分布を表しており、この式から表面SSの電流分布を求めることもできる。これにより、ステップS2で取得した磁束分布画像を高解像度化することができる。
【0055】
SQUID顕微鏡によりハネカム格子状超伝導体の磁束分布を観測したときの、磁束分布画像(高解像度化処理前の画像)を図7(A)に示す。
図7(A)の磁束分布画像に本発明の高解像度化処理を施した磁束分布画像を図7(B)に示す。
図7(A)の磁束分布画像では、格子の存在すら認識することは難しいが、図7(B)の磁束分布画像からはハネカム格子の存在を認識することができるし、どのハネカム格子セルに渦電流(量子渦)が多く流れているかも認識することができる。
【符号の説明】
【0056】
1 SSM(走査型SQUID顕微鏡)
6 試料
11 プローブ
12 走査機構
13 制御装置
14 演算装置
15 記憶装置
16 画像表示装置
111 平板チップ
112 プローブ駆動部
113 ピックアップコイル
121 ステージ
122 ステージ駆動機構
SS 試料の表面
SV 仮想面
qj 面素片
cj 電流素回路
Φ,Φj 磁束
【特許請求の範囲】
【請求項1】
先端にピックアップコイルが形成されてなるプローブにより試料の表面を走査し、この走査により取得した前記試料の表面の磁束分布画像を高解像度化する走査型SQUID顕微鏡画像の高解像度化方法において、
ピックアップコイルを含む仮想面を設定し、前記仮想面を面素片qj(1≦j≦n,nおよびjは自然数)に分割し、
前記ピックアップコイルが無いときに面素片qjのうちコイル導体に対応する面素片を通り抜けていた磁束のうち、前記ピックアップコイルがあるためにコイル孔側に押しやられた磁束の、前記面素片qjを通り抜けていた磁束に対する程度を示す形状因子要素fjを前記各面素片qjについてそれぞれ求めることで、形状因子fを(1)式、
f={fj|1≦j≦n,nおよびjは自然数} ・・・(1)
により算出し、
前記磁束分布画像に係る磁束分布のフーリエ変換を求め、
当該“磁束分布のフーリエ変換”に、前記形状因子を波数空間で表現した関数を乗算して、波数空間で表現した磁化を求め、これをフーリエ逆変換することで試料の表面上の磁化を得る、
ことを特徴とする走査型SQUID顕微鏡画像の高解像度化方法。
【請求項2】
前記磁束分布画像とともに、または前記磁束分布画像に代えて電流分布画像を高解像度化することを特徴とする請求項1に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【請求項3】
前記形状因子要素fjが(2)式、
fj=P{Yj+ΠΛ(−Yj)} ・・・(2)
Yj:面素片qjに仮想的に与えられた単位磁束であり、j番目の要素が「1」、それ以外の要素が「0」である縦行列(縦ベクトル)。
Λ:縦行列(−Yj)(Yjと逆向きの単位磁束)に作用し、前記面素片qjが前記コイル導体上にあるときは当該面素片qjを通り抜ける磁束の合計が「−1」、それ以外のコイル導体上の面素辺を通り抜ける磁束の合計が「0」となるように、前記コイル導体上にある前記各面素片qkを取り巻いて流れる各電流素回路ckに電流を割り当てる演算子。
Π:Λ(−Yj)で示される電流分布行列に作用し、各面素片qk(1≦k≦n,kは自然数)を取り巻くように流れる各電流素回路ckが、面素片qjにビオサバールの法則に従った磁束を作るための演算子。
具体的には、面素片qjの位置に作る磁束を、rkj(j≠k)を面素片qj,面素片pk間の距離として、
bkj=1/rkj3 ・・・(3)
とする行列。ただし、(j=k)のときは、
bjj=b0=−Σbkj(ただし、k≠j) ・・・(4)
P:Yj+ΠΛ(−Yj)に作用し、前記コイル孔では「1」,それ以外(コイル導体上およびコイルの外側)では「0」となる行列であって、前記コイル孔側に押しやられた磁束分布を抽出するための演算子。
により表されることを特徴とする請求項1に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【請求項4】
試料の表面に対するピックアップコイルを含む仮想面の傾斜角がθ(0≦θ<90°)である走査型SQUID顕微鏡画像の高解像度化方法であって、
波数空間で表現した磁化が、
【数1】
・・・(5)
で表され、当該波数空間で表現した磁化のフーリエ逆変換が、
【数2】
で表されることを特徴とする請求項1から3の何れか1項に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【請求項1】
先端にピックアップコイルが形成されてなるプローブにより試料の表面を走査し、この走査により取得した前記試料の表面の磁束分布画像を高解像度化する走査型SQUID顕微鏡画像の高解像度化方法において、
ピックアップコイルを含む仮想面を設定し、前記仮想面を面素片qj(1≦j≦n,nおよびjは自然数)に分割し、
前記ピックアップコイルが無いときに面素片qjのうちコイル導体に対応する面素片を通り抜けていた磁束のうち、前記ピックアップコイルがあるためにコイル孔側に押しやられた磁束の、前記面素片qjを通り抜けていた磁束に対する程度を示す形状因子要素fjを前記各面素片qjについてそれぞれ求めることで、形状因子fを(1)式、
f={fj|1≦j≦n,nおよびjは自然数} ・・・(1)
により算出し、
前記磁束分布画像に係る磁束分布のフーリエ変換を求め、
当該“磁束分布のフーリエ変換”に、前記形状因子を波数空間で表現した関数を乗算して、波数空間で表現した磁化を求め、これをフーリエ逆変換することで試料の表面上の磁化を得る、
ことを特徴とする走査型SQUID顕微鏡画像の高解像度化方法。
【請求項2】
前記磁束分布画像とともに、または前記磁束分布画像に代えて電流分布画像を高解像度化することを特徴とする請求項1に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【請求項3】
前記形状因子要素fjが(2)式、
fj=P{Yj+ΠΛ(−Yj)} ・・・(2)
Yj:面素片qjに仮想的に与えられた単位磁束であり、j番目の要素が「1」、それ以外の要素が「0」である縦行列(縦ベクトル)。
Λ:縦行列(−Yj)(Yjと逆向きの単位磁束)に作用し、前記面素片qjが前記コイル導体上にあるときは当該面素片qjを通り抜ける磁束の合計が「−1」、それ以外のコイル導体上の面素辺を通り抜ける磁束の合計が「0」となるように、前記コイル導体上にある前記各面素片qkを取り巻いて流れる各電流素回路ckに電流を割り当てる演算子。
Π:Λ(−Yj)で示される電流分布行列に作用し、各面素片qk(1≦k≦n,kは自然数)を取り巻くように流れる各電流素回路ckが、面素片qjにビオサバールの法則に従った磁束を作るための演算子。
具体的には、面素片qjの位置に作る磁束を、rkj(j≠k)を面素片qj,面素片pk間の距離として、
bkj=1/rkj3 ・・・(3)
とする行列。ただし、(j=k)のときは、
bjj=b0=−Σbkj(ただし、k≠j) ・・・(4)
P:Yj+ΠΛ(−Yj)に作用し、前記コイル孔では「1」,それ以外(コイル導体上およびコイルの外側)では「0」となる行列であって、前記コイル孔側に押しやられた磁束分布を抽出するための演算子。
により表されることを特徴とする請求項1に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【請求項4】
試料の表面に対するピックアップコイルを含む仮想面の傾斜角がθ(0≦θ<90°)である走査型SQUID顕微鏡画像の高解像度化方法であって、
波数空間で表現した磁化が、
【数1】
・・・(5)
で表され、当該波数空間で表現した磁化のフーリエ逆変換が、
【数2】
で表されることを特徴とする請求項1から3の何れか1項に記載の走査型SQUID顕微鏡画像の高解像度化方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−57647(P2013−57647A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−197707(P2011−197707)
【出願日】平成23年9月9日(2011.9.9)
【出願人】(504409543)国立大学法人秋田大学 (210)
【出願人】(505127721)公立大学法人大阪府立大学 (688)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月9日(2011.9.9)
【出願人】(504409543)国立大学法人秋田大学 (210)
【出願人】(505127721)公立大学法人大阪府立大学 (688)
【Fターム(参考)】
[ Back to top ]