
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置に関する。
【背景技術】
【0002】
少なくともTOF(Time of Flight)方式及びAM(amplitude modulation)方式の何れかが採用された走査式測距装置が、ロボットや無人搬送車の視覚センサ、或いは、ドアの開閉センサや監視対象領域への侵入者の有無を検出する監視センサ、さらには、危険な装置に人や物が近づくのを検出し、機械を安全に停止する安全センサ等に利用されている。
【0003】
TOF方式は、特許文献1に開示されているように、監視対象領域に向けて出力したパルス状の測定光と、測定光に対する物体からの反射光との検出時間差Δtに基づいて、走査式測距装置から監視対象領域内に存在する物体までの距離Dを算出する方式で、以下の数式を用いて距離Dが算出される。尚、式中、Cは光速である。
D=Δt・C/2
【0004】
AM方式は、特許文献2に開示されているように、測定光が振幅変調され、監視対象領域に向けて出力した測定光と、測定光に対する物体からの反射光との位相差Δφに基づいて、走査式測距装置から監視対象領域内に存在する物体までの距離Dを算出する方式で、以下の数式を用いて距離Dが算出される。尚、式中、Cは光速、fは変調周波数である。
D=Δφ・C/(4π・f)
【0005】
また、TOF方式とAM方式の双方を採用して、振幅変調した測定光をパルス状に出力することにより、振幅変調光の一波長以上の長い距離をTOF方式で算出し、振幅変調光の一波長よりも短い距離をAM方式で算出するバースト変調方式の走査式測距装置も提案されている。
【0006】
さらに、特許文献3には、レーザセンサを用いて対象の領域を照射し、得られた測距データを処理装置で処理することによって物体の位置を検知する物体検知システムであって、該レーザセンサによって該領域の背景に相当する物体の情報を取得する背景データ取得手段と、該レーザセンサによって該領域内にある物体の経時的な測距データを取得して該物体の位置を検知する位置検知手段と、該領域における該物体の存在位置を検知する物体検知手段とを備えた物体検知システムが提案されている。
【0007】
何れの場合にも、走査式測距装置の信号処理装置には、測定光と反射光との間の所定の相関関係、例えば両者の遅延時間または位相差と距離との間に見られる相関関係に基づいて、所定の走査角度毎に走査式測距装置から監視対象領域内に存在する物体までの距離を算出する距離算出部を備えている。
【0008】
更に特許文献4には、一定の周波数でパルス変調された照射光を対象物に照射し、その反射光をPSD(Position Sensing Device)等の受光素子で受光し、その受光位置に応じて生じる光電変換信号に基づいて、対象物までの距離を測距する三角測距の原理を用いた測距装置が提案されている。PSD(Position Sensing Device)に替えて二次元の撮像デバイスを用いることも可能である。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2007−256191号公報
【特許文献2】特開2002−90454号公報
【特許文献3】特開2009−85927号公報
【特許文献4】特開平06−288764号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、何れの方式を採用する走査式測距装置であっても、物体からの反射光に基づいて監視対象領域内に監視対象物が存在するか否かを正確に判定するのは容易ではなく、誤検知する虞があるという問題があった。
【0011】
例えば、監視対象領域内で浮遊する微小な埃や、監視対象領域内で飛び回る微小な虫等からの反射光を監視対象物からの反射光と誤認する場合や、監視対象領域内に設置された他の走査式測距装置からの測定光を監視対象物からの反射光と誤認する虞がある。
【0012】
更に、監視対象領域が野外に区画される場合には、木の葉や雨滴等からの反射光を監視対象物からの反射光と誤認する虞もある。
【0013】
そこで、物体が測定光の走査方向に沿って所定幅以上、言い換えると所定角度以上連続して検出される場合に、その物体が監視対象物であると判定し、所定幅未満、言い換えると所定角度未満の物体をノイズと認識して監視対象物の有無の判定対象から排除することが考えられる。
【0014】
しかし、走査式測距装置の近傍に小さな虫等のノイズ源が存在する場合には、その背後に存在するかも知れない監視対象物の一部または全部がノイズ源に隠されて、所定幅以上の物体として認識できない場合が発生するという問題があった。
【0015】
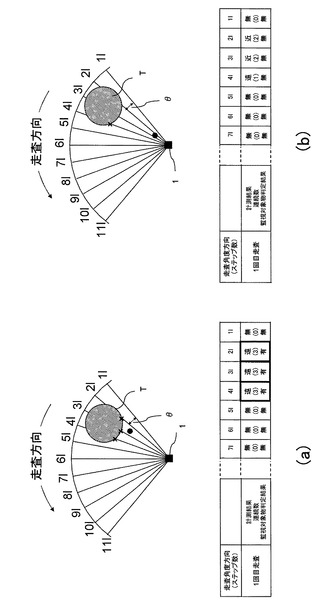
具体的に説明する。図11(a),(b)の上段には、走査式測距装置1から所定の距離に設定された扇形の監視対象領域に向けて、所定周期で測定光を繰り返し走査し、走査角度θ毎に測定光に対する物体からの反射光を検知することにより、人間の腕程度の大きさの監視対象物を検出する場合の説明図が示されている。図中、ハッチングされた大きな円が監視対象物T、黒く塗り潰された小さな円がノイズとなる微小物であり、符号1l,2l,3l,・・・,10l,11lは走査角度方向(「ステップ」とも記す。)を示している。
【0016】
図11(a),(b)の下段には、遠方側で走査角度方向に2回連続して同等の距離が算出されると監視対象物「有」と判定し、近傍側で走査角度方向に3回連続して同等の距離が算出されると監視対象物「有」と判定する場合の判定結果がテーブル表示されている。
【0017】
テーブルには、各走査角度方向に対する「計測結果」、「連続数」、「監視対象物判定結果」の各欄が設けられている。「計測結果」の欄には、物体までの距離が監視対象領域内の距離であり、走査式測距装置の近傍側に位置する微小物体に対する距離である場合に「近」、走査式測距装置の遠方側に位置する監視対象物Tに対する距離である場合に「遠」、監視対象領域外の距離であるか距離が算出されなかった場合に「無」と記されている。「連続数」の欄には、走査方向に沿って連続する「遠」の数、または「近」の数が記されている。「監視対象物判定結果」の欄には「有」「無」の何れかの判定結果が記されている。
【0018】
図11(a)に示す状況では、走査式測距装置の遠方側に監視対象物Tが存在すると判定することができるが、図11(b)に示す状況では、走査式測距装置の遠方側に監視対象物Tが存在すると判定することができない。近傍側に位置する微小物体によって遠方側の監視対象物Tの連続性が損なわれるためである。
【0019】
走査式測距装置を安全センサとして使用する場合には、機械の制御装置が、当該走査式測距装置から出力される監視対象物検知信号に基づいて、監視対象領域に監視対象物が検出されたと判断すると、安全のために機械を自動停止させる必要がある。しかし、このような誤認識によって走査式測距装置から監視対象物検知信号が出力されない場合があるという不都合な事態が発生する。
【0020】
本発明の目的は、上述した問題点に鑑み、ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置を提供する点にある。
【課題を解決するための手段】
【0021】
上述の目的を達成するため、本発明による走査式測距装置の信号処理装置の第一の特徴構成は、特許請求の範囲の書類の請求項1に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出部と、前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、を備えている点にある。
【0022】
監視対象領域内を走査する測定光に対応する反射光が走査式測距装置で検知されると、当該測定光と反射光との間の所定の相関関係に基づいて、距離算出部によって走査角度毎に距離が算出される。尚、或る走査角度方向に物体が存在しない場合には、反射光が検知されないため、その走査角度で距離は算出されない。
【0023】
距離算出部によって算出された距離が監視対象領域内を示す値であれば、対応する物体が監視対象領域内に存在することになる。そして、このような距離が隣接する複数の走査角度方向に存在すると、ある程度のサイズの物体が存在すると仮定することができる。当然のことであるが、同じサイズの物体であっても、走査式測距装置の近傍では連続して検出される走査角度の数が多く、走査式測距装置の遠方では連続して検出される走査角度の数が少なくなる。
【0024】
そこで、グループ生成処理部によって、このような関係を示す複数の距離データが一纏めにグループ化され、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値がそのグループの代表距離に設定される。
【0025】
そして、監視対象物判定部によって、グループに含まれる距離データの個数または最大走査角度で定義される物体検出幅、つまり走査方向に沿った物体のサイズが、その代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定される。尚、物体検出最小幅を示す個数未満または走査角度未満の距離データが纏められたグループは、監視対象物ではなくノイズであると判定されることになる。
【0026】
監視対象領域内に存在する物体が微小な埃や虫、或は雨滴であれば、隣接する走査角度方向で連続して距離が算出される確率は非常に小さくなる。そこで、或る程度の幅で連続する走査角度方向に、略等しい距離データが連続して算出される場合に、監視対象物が存在すると判定することも可能である。しかし、この場合、走査式測距装置から見て近傍に位置するノイズ源としての小さな物体の背後に何らかの別の物体が存在すると、当該背後の別の物体の連続性が近傍の小さな物体によって断たれるため、背後の別の物体が監視対象物であると判定されない虞がある。
【0027】
上述の第一の特徴構成を備えた信号処理装置では、走査方向に沿って連続する走査角度で連続して算出された距離データが、その値に関係なくグループ化されるので、背後の別の物体の連続性が近傍の小さな物体によって断たれるような不都合な事態が生じることが無い。しかも、監視対象物であるか否かを判定するためのグループの代表距離が、グループ内の複数の距離データの平均値または中央値から当該距離データの最大値迄の何れかの値に設定されるので、走査式測距装置から見て近傍側よりも遠方側を重視した物体検出最小幅の判定ができるようになる。
【0028】
同第二の特徴構成は、同請求項2に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出部と、前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、各グループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されず、複数のグループが隣接する場合に、隣接する二つのグループを纏めた一つの新たなグループを生成し、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値を新たなグループの代表距離に設定するグループ統合処理部と、前記グループ生成処理部または前記グループ統合処理部で生成されたグループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、を備えている点にある。
【0029】
第二の特徴構成を備えた信号処理装置では、距離算出部により算出された距離データが、監視対象領域内を示す値であること、隣接する複数の走査角度方向に存在すること、そして隣接する走査角度方向の距離データの差分が第一の閾値以下となること、という三つの条件を満たす場合に、グループ生成処理部によって複数の距離データがグループ化される。そして、第一の特徴構成と同様にして監視対象物判定部によって監視対象物が存在するか否かが判定される。
【0030】
しかし、走査式測距装置から見て近傍に位置するノイズ源としての小さな物体の背後に何らかの別の物体が存在すると、当該背後の別の物体の連続性が近傍の小さな物体によって断たれるため、グループ生成処理部によって背後の別の物体が複数のグループとして生成されることになる。そして、監視対象物判定部によってグループ毎に物体検出最小幅の判定が行なわれると、背後の別の物体が監視対象物であると判定されない虞がある。
【0031】
そこで、このような場合に、グループ統合処理部によって、隣接する二つのグループを纏めた一つの新たなグループが生成され、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値が新たなグループの代表距離に設定される。監視対象物判定部によって、このように統合されたグループに対する物体検出最小幅の判定が行なわれることで、適正に監視対象物の有無が判定されるようになる。
【0032】
同第三の特徴構成は、同請求項3に記載した通り、上述の第二の特徴構成に加えて、前記グループ統合処理部は、距離データの数が最大となる二つの隣接グループを纏めて一つの新たなグループを生成する点にある。
【0033】
グループ生成処理部で生成された複数のグループのうち、或るグループに隣接するグループが走査方向に沿って両隣に存在する場合、隣接する2グループを構成する距離データの数の和が最大となるグループを統合して一つの新たなグループを生成することで、安全サイドで適正に監視対象物の有無が判定されるようになる。
【0034】
同第四の特徴構成は、同請求項4に記載した通り、上述の第二の特徴構成に加えて、前記グループ統合処理部は、代表距離が短いグループと当該代表距離が短いグループに隣接する代表距離が長いグループとを纏めて一つの新たなグループを生成する点にある。
【0035】
走査式測距装置から見て近傍に位置するグループと当該グループに隣接する遠方側のグループを統合して一つの新たなグループを生成することで、遠方側のグループに対する物体検出最小幅の判定が適正に行なわれるようになる。
【0036】
同第五の特徴構成は、同請求項5に記載した通り、上述の第二の特徴構成に加えて、前記グループ統合処理部は、代表距離が短いグループの両側に代表距離が長いグループが隣接する場合に、両側の代表距離が長いグループの距離データから得られる統合基準距離の差分が第二の閾値以下の場合に、当該代表距離が短いグループと両側の代表距離が長いグループを纏めて一つの新たなグループを生成する点にある。
【0037】
両側の代表距離が長いグループの統合基準距離の差分が第二の閾値以下の場合に、これらのグループに属する距離データが同一の物体に対する距離データであると判断して、これらのグループを統合することによって、遠方側のグループに対する物体検出最小幅の判定が適正に行なわれるようになる。統合基準距離とは、両側の代表距離が長い2グループが同一の物体に対する距離であることの確からしさを判定するための距離であり、代表距離が短いグループに最も近い走査角度方向の距離データ、代表距離、グループ内の距離データの平均値、中央値等の何れかを採用することができる。
【0038】
同第六の特徴構成は、同請求項6に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの一または複数の距離を算出する距離算出部と、前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、を備えている点にある。
【0039】
走査式測距装置から走査される測定光の光芒、つまり測定光を形成する光線束の径が近傍に存在する微小物体のサイズよりも大きい場合に、当該微小物体より遠方に測定光の一部が走査される。そのときに微小物体の背景に少なくとも一つの他の物体が存在していると、微小物体からの反射光とその背景に存在する物体からの反射光の二つの反射光が走査式測距装置によって検知され、距離算出部によって少なくとも二つの距離が算出される場合がある。
【0040】
第六の特徴構成によれば、距離算出部により算出された距離データが、監視対象領域内を示す値であること、隣接する複数の走査角度方向に存在すること、そして隣接する走査角度方向の距離データの差分が第一の閾値以下となること、という三つの条件を満たす場合に、グループ生成処理部によって複数の距離データがグループ化される。
【0041】
例えば、走査式測距装置から見て近傍に位置するノイズ源としての小さな物体の背後に何らかの別の物体が存在する場合であっても、当該背後の別の物体の連続性が近傍の小さな物体によって断たれることが無いため、グループ生成処理部によって背後の別の物体が一つのグループとして生成されることになる。
従って、微小なノイズ物体や他の測距装置からのノイズ光が存在する環境であっても、監視対象物を適正に検知することができるのである。
【0042】
同第七の特徴構成は、同請求項7に記載した通り、上述の第一から第六の何れかの特徴構成に加えて、前記代表距離に、前記グループに含まれる距離データの最大値が設定される点にある。
【0043】
グループに含まれる距離データの最大値を代表距離に設定すれば、或る走査角度で、走査式測距装置の遠方側に位置する物体への測定光の照射が近傍側の微小物体で遮られる場合に、遠方に位置する物体の距離に対応した適切な物体検出最小幅の判定ができるようになる。
【0044】
同第八の特徴構成は、同請求項8に記載した通り、上述の第一から第七の何れかの特徴構成に加えて、前記物体検出最小幅を示す値は、代表距離が長くなるほど小さくなるように設定されている点にある。
【0045】
既に説明したように、同じサイズの物体であっても、走査式測距装置の近傍では連続して検出される走査角度の数が多く、または最大走査角度が大きく、走査式測距装置の遠方では連続して検出される走査角度の数が少なく、または最大走査角度が小さくなる。そこで、グループの代表距離が長くなるほど物体検出最小幅を示す値を小さくすれば、走査式測距装置を基準に遠近何れの位置に存在する物体であっても、適正に監視対象物であるか否かを判定できるようになる。
【0046】
本発明による走査式測距装置の特徴構成は、同請求項9に記載した通り、上述した第一から第八の何れかの特徴構成を備えた走査式測距装置の信号処理装置が組み込まれている点にあり、真に検出すべき監視対象物を適正に検知できる走査式測距装置を実現することができるようになる。
【0047】
本発明による走査式測距装置の信号処理方法の第一の特徴構成は、同請求項10に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出ステップと、前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、を備えている点にある。
【0048】
同第二の特徴構成は、同請求項11に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出ステップと、前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、各グループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されず、複数のグループが隣接する場合に、隣接する二つのグループを纏めた一つの新たなグループを生成し、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値を新たなグループの代表距離に設定するグループ統合処理ステップと、前記グループ生成処理ステップまたは前記グループ統合処理ステップで生成されたグループに対する前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、を備えている点にある。
【0049】
同第三の特徴構成は、同請求項12に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの一または複数の距離を算出する距離算出ステップと、前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、を備えている点にある。
【発明の効果】
【0050】
以上説明した通り、本発明によれば、ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置を提供することができるようになった。
【図面の簡単な説明】
【0051】
【図1】本発明による走査式測距装置の全体構成を示す概略縦断面図
【図2】走査式測距装置に組み込まれる信号処理装置を含む全体の機能ブロック構成図
【図3】信号処理部とシステム制御部とで構成される信号処理装置の第一及び第三の態様を示す機能ブロック構成図
【図4】信号処理装置で実行される全体の処理を説明するフローチャート
【図5】信号処理装置の第一の態様を示し、グループ生成処理部による処理内容を示す説明図
【図6】信号処理装置の第二の態様を示す機能ブロック構成図
【図7】信号処理装置の第二の態様を示し、グループ生成処理部及びグループ統合処理部による処理内容を示す説明図
【図8】(a),(b),(c)は、信号処理装置の第二の態様を示し、グループ生成処理部及びグループ統合処理部による処理内容を示す説明、(d)は信号処理装置の第三の態様を示し、グループ生成処理部による処理内容を示す説明図
【図9】信号処理装置の第三の態様の前提事項である同一の操作角度方向に複数の距離が算出可能な原理の説明図
【図10】別実施形態を示す第一及び第二偏光ミラーの説明図
【図11】従来技術の説明図
【発明を実施するための形態】
【0052】
以下、本発明による走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置を図面に基づいて説明する。以下の例では、測定光の光源に赤外半導体レーザが用いられ、TOF方式によって物体までの距離を算出する距離算出部等を備えた信号処理装置が組み込まれ、安全センサとして用いられる走査式測距装置について説明する。
【0053】
当該走査式測距装置によって、予め設定された監視対象領域に侵入者や搬送車両等のある程度のサイズの障害物が監視対象として検知されると、その旨の信号が外部装置に出力される。外部装置は、当該信号に基づいて、例えば安全のために機器を停止する等の所定の制御を行なう。
【0054】
尚、半導体レーザ以外の種類のレーザやLED等の他の種類の光源を用いた走査式測距装置にも本発明を適用することができる。また、距離算出方式としてTOF方式以外の方式、例えばAM方式や、TOF方式とAM方式の双方を採用したバースト変調方式を採用する距離算出部にも本発明を適用することができる。さらには、PSD(Position Sensing Device)やCMOSタイプの二次元撮像素子等の受光素子で反射光を受光し、その受光位置に応じて生じる光電変換信号に基づいて、対象物までの距離を測距する三角測距の原理を用いた測距装置にも本発明を適用することができる。
【0055】
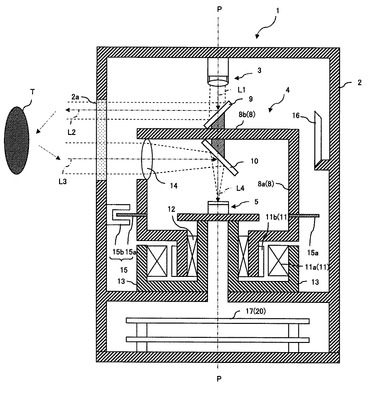
図1にはこのような走査式測距装置が例示されている。走査式測距装置1は、一対の投光部3及び受光部5を収容する円筒状のケーシング2と、ケーシング2の周方向に沿って配置された弧状の光学窓2aを備え、投光部3から出力された測定光を円筒状ケーシングの軸心Pと直交する方向に偏向反射する第一偏向ミラー9、及び、被測定物Tからの反射光を受光部5に向けて偏向反射する第二偏向ミラー10を軸心P周りに回転して、測定光を軸心Pと直交する平面上で回転走査する偏向光学系4を備えている。
【0056】
ケーシング2の内壁面は迷光を吸収する暗幕等の吸光部材で被覆され、軸心Pに沿って対向配置された投光部3と受光部5の間に、偏向光学系4が配置されている。
【0057】
投光部3は、赤外半導体レーザでなる発光素子と、発光素子から出力された光ビームを平行光に形成する光学レンズを備えて構成され、ケーシング2の上壁内側に固定されている。
【0058】
受光部5は、反射光を検出するアバランシェフォトダイオードでなる受光素子を備えて構成され、ケーシング2に固定された中空軸13上の支持板上に固定されている。
【0059】
偏向光学系4は、第一偏向ミラー9及び第二偏向ミラー10が取り付けられた天面8bと、反射光を受光部5で集光する受光レンズ14が取り付けられた周壁部8aを備えた円筒状の回転体8と、回転体8を一方向に回転駆動するモータ11を備えている。
【0060】
下端部が縮径された回転体8は、その内周面に備えた軸受12を介して中空軸13に回転可能に支承され、縮径部の外周面にモータ11の回転子となるマグネット11bが取り付けられている。当該回転子と、当該回転子に対向配置されたコイル11aでなる固定子によりモータ11が構成され、固定子のカバーがケーシング2に固定された中空軸13に取り付けられている。
【0061】
投光部3から光軸L1に沿って出射された測定光が、第一偏向ミラー9で光軸L1と直交する光軸L2に偏向され、光学窓2aを通過して測定対象空間に向けて照射される。測定対象空間に存在する被測定物Tからの反射光が、光軸L2と平行な光軸L3に沿って光学窓2aを通過して受光レンズ14に入光し、第二偏向ミラー10で光軸L3と直交する光軸L4に偏向され、受光部5に集光される。
【0062】
第一偏向ミラー9で偏向された測定光が光学窓2aの上方領域を透過し、被測定物Tからの反射光が光学窓2bの下方領域を透過する。
【0063】
モータ11で回転駆動される偏向光学系4により、測定光が光学窓2aを介して測定対象空間に走査される範囲、具体的には上述した軸心Pを基準とする約270度の角度範囲が計測用走査角度領域となり、測定光がケーシング2に遮られて測定対象空間に出射されない角度領域が非計測用走査角度領域となる。
【0064】
つまり、偏向光学系4により、投光部3から出力された測定光を、光学窓2aを介して測定対象空間に周期的に偏向走査する走査部が構成されている。
【0065】
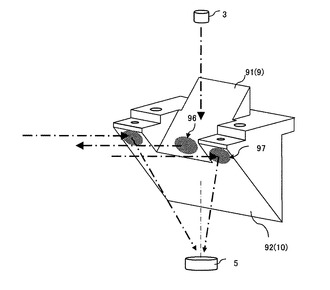
図10に示すように、第一偏光ミラー9と第二偏光ミラー10を樹脂または光学ガラスで一体成形してもよい。この例では、第一偏向面91により光軸L1に対して測定光を測定対象領域に向けて90度偏向させる第一偏向ミラー9が構成され、第二偏向面92により反射光を光軸L4に沿った受光部5に向けて90度偏向させる第二偏向ミラー10が構成されている。
【0066】
そして、第二偏向面92の上端側中央部が切り欠かれ、当該切欠部95に第一偏向ミラー9が延出形成されている。このような構成を採用することによって、装置の小型化を図ることができる。
【0067】
周方向に複数のスリットが形成された円盤状のスリット板15aが、回転体8の周壁部8aに取り付けられるとともに、当該スリットを検出するフォトインタラプタ15bがケーシング2の内壁に取り付けられ、これらにより偏向光学系4の走査角度を検出する走査角度検出部15が構成されている。
【0068】
スリット板15aに形成されるスリットは、測定光が非走査角度領域の中心に向けて照射される基準位置を除いて均等間隔で形成され、基準位置ではスリット間隔が他の間隔より狭い間隔に形成されている。従って、偏向光学系4の回転に伴なって走査角度検出部15から出力されるパルスのパルス幅に基づいて、基準位置から偏向光学系4の回転角度位置が把握できるように構成されている。
【0069】
非走査角度領域の中心には、距離補正用の基準光学系としてのプリズム16が設けられ、当該プリズム16を介して受光部5で検知される反射光に基づいて、補正用の基準距離が求められる。
【0070】
ケーシング2の底部には、装置を駆動して被測定物Tまでの距離を算出する信号処理回路20を備えた制御基板17が収容されている。
【0071】
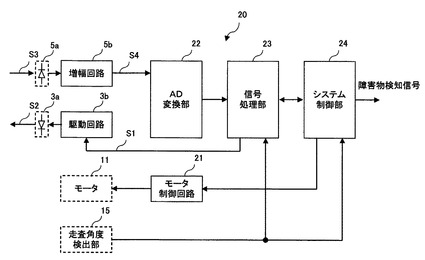
図2に示すように、信号処理回路20には、発光素子3aを駆動する駆動回路3b、反射光が受光素子5aで光電変換された反射信号を増幅する増幅回路5b、モータ制御回路21、A/D変換部22、信号処理部23、システム制御部24を備えている。信号処理部23及びシステム制御部24によって、本発明による信号処理装置が構成されている。
【0072】
システム制御部24には、所定の制御プログラムに基づいて動作するマイクロコンピュータが設けられ、当該マイクロコンピュータによって信号処理部23、モータ制御回路21等が制御される。
【0073】
システム制御部24は、走査角度検出部15から入力されるエンコーダパルスに基づいて、走査角度つまり測定光の照射方向を検出するとともに、偏向光学系4によって測定光が所定の一定速度で周期的に測定対象空間に走査されるようにモータ制御回路21を制御する。
【0074】
そして、信号処理部23から入力される距離と、走査角度検出部15を介して検出した走査角度等の測定情報、或いは、監視対象領域に障害物が存在することを表す障害物検知信号を、インタフェースを介して接続された外部装置に出力する。
【0075】
尚、信号処理装置は、ケーシング2の内部に収容され、走査式測距装置1と一体で構成される以外に、ケーシング2の外部に設置され、走査式測距装置1と別体で構成されていてもよい。後者の場合には、信号処理装置はA/D変換部22等が搭載されたケーシング2内部の制御基板17と信号線を介して接続され、或は無線通信部を介して接続される。
【0076】
走査角度検出部15から入力されるエンコーダパルスに同期して、信号処理部23から駆動回路3bに出力される駆動パルス信号S1により赤外半導体レーザ3aがパルス駆動され、測定対象空間にパルス状の測定光S2が照射される。
【0077】
当該測定光S2が被測定物Tに照射され、被測定物Tからの反射光S3がアバランシェフォトダイオード5aで光電変換され、さらに増幅回路5bで増幅された反射信号S4がA/D変換部22に入力される。
【0078】
A/D変換部22でA/D変換されたデジタルの反射信号が信号処理部23に入力され、信号処理部23で駆動パルス信号S1と反射信号の時間差Δtが求められ、以下の式に基づいて被測定物T迄の仮の距離D1が算出される。
D1=Δt・C/2 (但し、Cは光速である。)
【0079】
ここで、時間差Δtとは測定光に対する反射光の遅延時間をいい、上述の例では測定光の照射時期を駆動パルス信号S1の立ち上がり時期で代用しているが、測定光を検知する光電センサを用いて測定光そのものの立ち上がり時期を検知してもよい。
【0080】
一方、走査角度検出部15から入力されるエンコーダパルスが基準位置を示すときに、測定光がプリズム16に照射され、アバランシェフォトダイオード5aで検出されたプリズム16からの反射光S3に基づく時間差Δt´に対応する基準距離D2が以下の式に基づいて算出される。
D2=Δt´・C/2 (但し、Cは光速である。)
【0081】
被測定物迄の距離Dが、D1−D2によって算出される。当該基準距離D2は、走査式測距装置1に組み込まれた赤外半導体レーザ3a、駆動回路3b、アバランシェフォトダイオード5a等の特性ばらつきや、光学系の機差による計測距離のばらつきを吸収して、被測定物迄の正確な距離を算出するための補正値となる。
【0082】
ところで、反射信号S4の立上り時期を検知するために所定の閾値電圧と比較する比較器を設ける場合、同じ時期に発生する反射信号S4であっても、その信号強度によって立ち上がり波形の傾きが異なるために、比較器からの出力時期が変動して、反射信号S4の立上り時期を正確に検知できない虞がある。
【0083】
そのため、信号処理部23は、反射信号S4を一次微分し、一次微分反射信号の立上り時期を基準に当該一次微分反射信号の正領域の重心位置を算出し、当該重心位置に対応する時期を反射光S3の検出時期として求めるように構成されている。
【0084】
以下、本願発明の信号処理装置の第一から第三の三つの態様を説明する。
先ず、第一の態様について詳述する。
【0085】
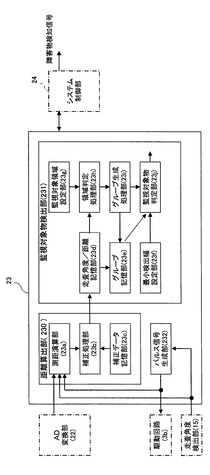
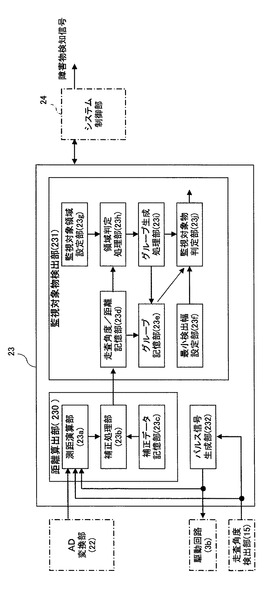
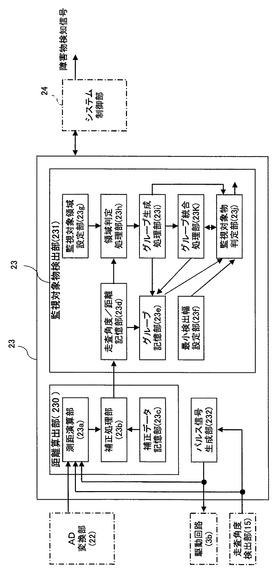
図3に示すように、信号処理部23は信号処理用のゲートアレイやデジタルシグナルプロセッサ、さらには各種の演算のためのデータ記憶部となる複数のレジスタ等を備えたASIC等の集積回路で構成されている。
【0086】
これら集積回路によって、上述した被測定物迄の距離Dを算出する距離算出部230と、距離算出部230で算出された距離情報等に基づいて障害となる監視対象物を検出する監視対象物検出部231と、駆動回路3bや距離算出部230等を駆動するためのクロック信号を生成するパルス信号生成部232の各機能ブロックが構成されている。
【0087】
距離算出部230は、上述した距離D1,D2を算出する測距演算部23aと、算出された補正距離D2を記憶する補正データ記憶部23cと、上述した距離補正演算を行なう補正処理部23bを備えた機能ブロックである。
【0088】
距離算出部230は、測定光と反射光との間の所定の相関関係に基づいて、所定の走査角度毎に当該走査式測距装置1から監視対象領域内に存在する物体までの距離を算出する処理を測定光の走査周期で繰り返す。所定の相関関係とは、TOF方式では測定光に対する反射光の遅延時間と距離との相関関係、AM方式では測定光に対する反射光の位相差と距離との相関関係をいう。
【0089】
監視対象物検出部231は、監視対象領域設定部23gと、領域判定部23hと、グループ生成処理部23iと、監視対象物判定部23jと、走査角度/距離記憶部23dと、グループ記憶部23eと、最小検出幅設定部23fを備えた機能ブロックである。
【0090】
監視対象物検出部231は、走査式測距装置1で検知された物体からの反射光が、監視対象物以外の微小な埃や虫等から反射したノイズ光であるか、監視対象領域内に進入または侵入した監視対象物から反射した信号光であるか否かを判定して、適正に監視対象物を検出するために設けられている。
【0091】
監視対象領域設定部23gは、走査式測距装置1により監視すべき監視対象領域の境界を規定する領域データが記憶されたメモリを備えている。当該領域データは、システム制御部24に接続されたコンピュータ等の外部装置から入力され、システム制御部24を介して当該メモリに予め記憶されている。
【0092】
走査角度/距離記憶部23dには、距離算出部230で算出された物体の走査角度と距離が走査周期毎に記憶される。領域判定部23hは、走査角度/距離記憶部23dに記憶された走査周期毎の物体の距離が、監視対象領域設定部23gのメモリに記憶された監視対象領域の内部に位置する距離であるか否かを判定し、監視対象領域の内部に位置する場合にのみ、その距離と走査角度をグループ生成処理部23iに引き渡す。
【0093】
グループ生成処理部23iは、測定光の走査方向に沿って連続する複数の走査角度方向に存在する距離データを一つに纏めたグループを生成し、各距離データにグループの識別子を付与するとともに当該グループの代表距離を設定して、それらのデータをグループ記憶部23eに記憶する。
【0094】
最小検出幅記憶部23fには、走査式測距装置1からの距離に応じて予め設定された物体検出最小幅を示す距離データの個数が記憶されている。物体検出最小幅とは、物体が監視対象物であるかノイズであるかを判定するための測定光の走査方向に沿った物体のサイズであり、それを示す距離データの個数は走査式測距装置1からの距離が長くなるほど小さくなるように設定されている。物体検出最小幅を示す距離データの個数は、システム制御部24に接続された外部装置から予め入力されて記憶される。
【0095】
グループの代表距離とは、最小検出幅記憶部23fに記憶されている複数の物体検出最小幅の一つを特定するための値で、グループに含まれる距離データの平均値または中央値の何れか、または、その値から当該距離データの最大値迄の何れかの値が設定される。
【0096】
尚、最小検出幅記憶部23fに記憶される物体検出最小幅を示す値が、最大走査角度で定義された角度データであってもよい。この場合にも、走査式測距装置1からの距離が長くなるほど小さくなるように設定される。以下の説明では物体検出最小幅が距離データの個数である場合を説明するが、角度データであっても同様の処理が適用できる。
【0097】
グループ生成処理部23iによって走査周期毎にグループ化処理が行なわれると監視対象物判定部23jが起動される。監視対象物判定部23jは、各グループの表距離に応じて最小検出幅記憶部23fから物体検出最小幅を示す個数を読み出して、各グループの物体検出幅である距離データの個数が、物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定し、各グループの物体検出幅である距離データの個数が、物体検出最小幅を示す個数未満となる場合に、監視対象物が存在しないと判定する。
【0098】
監視対象物検出部231によって、監視対象物が存在することが検出されると、その旨の信号がシステム制御部24に出力され、システム制御部24から外部装置にオン状態の監視対象物検知信号が出力される。
【0099】
監視対象物検出部231によって、監視対象物が存在しないことが検出されると、その旨の信号がシステム制御部24に出力され、システム制御部24から外部装置にオフ状態の監視対象物検知信号が出力される。つまり、システム制御部24が監視対象物検知信号を外部に出力する信号出力部となる。
【0100】
外部装置は、システム制御部24から監視対象物検知信号が入力されると、監視対象領域内に設置されている装置を安全のために停止制御する等の予め設定された所定の処理を実行する。
【0101】
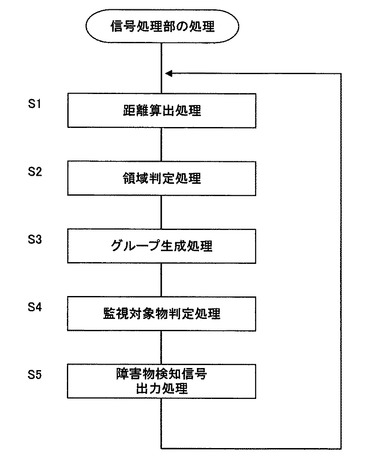
図4には、上述した信号処理装置23,24で実行される監視対象物検出処理のフローチャートが示されている。距離算出部230によって物体に対する距離算出処理が実行され、その値が走査角度/距離記憶部23dに記憶される(S1)。領域判定処理部23hによって領域判定処理が実行され(S3)、監視対象領域内の走査角度/距離データがグループ生成処理部23iに引き渡される。
【0102】
グループ生成処理部23iによってグループ生成処理が実行され(S3)、監視対象物判定処理部23jによって監視対象物判定処理が実行され(S4)、システム制御部24によって障害物検知信号出力処理が実行される(S5)。
【0103】
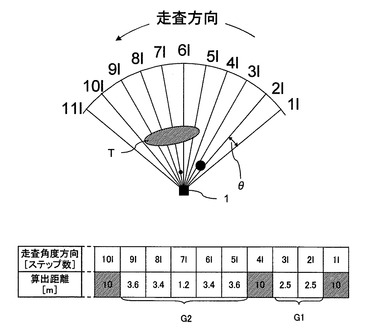
図5には、走査式測距装置1から最大距離が10mの値に設定された扇形の監視対象領域に向けて、走査周期30msec.で測定光を繰り返し走査し、走査角度θ(=0.25°)毎に測定光に対する物体からの反射光を検知することにより、人間の腕程度の大きさの監視対象物を検出する場合の説明図が示されている。図中、ハッチングされた大きな長円が監視対象物T、黒く塗り潰された小さな円がノイズとなる微小物である。
【0104】
この例では、走査式測距装置1から10m離れた位置で、走査角度θが0.25°の幅が約4.36cmとなる。つまり、隣接する走査角度で連続して距離10mの位置に物体Tが検知されると少なくとも人間の腕程度の物体が存在することが判定できる。
【0105】
図5の上段には、走査式測距装置1から反時計周りに測定光が回転走査されたときの状態が示されている。符号1l,2l,3l,・・・,10l,11lは走査角度方向(「ステップ」とも記す。)を示している。
【0106】
図5の下段には、走査角度方向と算出距離のテーブルが示されている。この例では、走査角度方向2l,3lで微小物体(図中、黒丸で示す)に対する距離が算出され、走査角度方向5l,6l,8l,9lで監視対象物Tに対する距離が算出され、走査角度方向7lで他の微小物体(図中、黒丸で示す)に対する距離が算出されている。
【0107】
また、距離算出部230によって算出された距離が監視対象外であるか、或は距離が算出されなかった場合に、算出距離の枠がハッチングされている。当該枠内の数値は監視対象領域の最大距離である。
【0108】
この例では、グループ生成処理部23iによって、距離データがグループG1とグループG2の二つのグループに分けられ、グループG1またはグループG2の識別子が付与された各距離データと代表距離がグループ記憶部23eに記憶される。代表距離はグループに含まれる距離データの最大値に設定され、グループG1の代表距離が2.5mに、グループG2の代表距離が3.6mに設定される。
【0109】
最小検出幅記憶部23fには、走査式測距装置1からの距離に応じた物体検出最小幅が記憶されている。この例では、物体検出最小幅の値は、走査式測距装置1からの距離が3.0m未満で3に設定され、走査式測距装置1からの距離が3.0m以上で2に設定されている。
【0110】
監視対象物判定部23jは、グループG1の距離データの数2が、グループG1の代表距離2.5mに対応する物体検出最小幅3よりも小となるために、グループG1が監視対象物ではなくノイズであると判定する。
【0111】
さらに、監視対象物判定部23jは、グループG2の距離データの数5が、グループG2の代表距離3.6mに対応する物体検出最小幅2よりも大となるために、グループG2が監視対象物であると判定する。
【0112】
このように、信号処理装置23,24では、走査方向に沿って連続する走査角度で連続して算出された距離データが、その値に関係なくグループ化されるので、背後の別の物体の連続性が近傍の小さな物体によって断たれるような不都合な事態が生じることが無い。
【0113】
尚、監視対象物であるか否かを判定するためのグループの代表距離を、グループ内の複数の距離データの平均値または中央値から当該距離データの最大値迄の何れかの値に設定すれば、走査式測距装置から見て近傍側に位置する物体よりも遠方側に位置する物体を重視した判定ができるようになる。
【0114】
以下、本願発明の信号処理装置の第二の態様を説明する。
図6には、第二の態様の信号処理部23のブロック構成図が示されている。図3で示した信号処理部23と比較すると、グループ生成処理部23iによるグループの生成基準が異なり、グループ生成処理部23iに加えてグループ統合処理部23kを備えている点が異なる。
【0115】
第一の態様では、グループ生成処理部23iは、距離算出部230により算出された距離データが、監視対象領域内を示す値であり、且つ、当該距離データが測定光の走査方向に沿って連続する複数の走査角度方向に存在するときに、各距離データの値に関わらず一律にグループを生成するように構成されているが、第二の態様では、各距離データの値に基づいてグループを生成するように構成されている。
【0116】
以下、具体的に説明する。グループ生成処理部23iは、距離算出部230により算出された距離データが、監視対象領域内を示す値であり、且つ、当該距離データが測定光の走査方向に沿って連続する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成するように構成されている。
【0117】
そして、グループ生成処理部23iは、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するように構成されている。
【0118】
第一の閾値は、物体が同一物と推定可能な閾値であり、監視対象物の表面の凹凸形状等に基づいて予め設定される値である。この例では、0.2mに設定されている。
【0119】
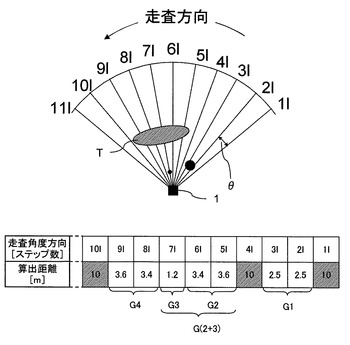
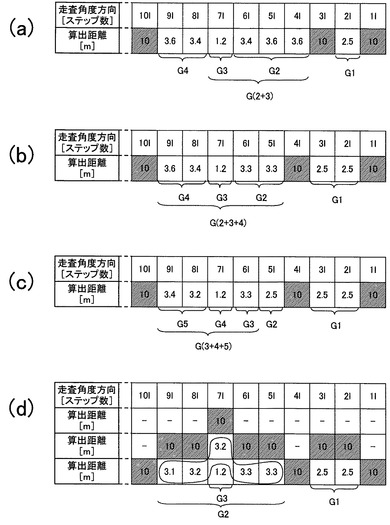
図7に示すように、グループ生成処理部23iによって、距離データがグループG1,G2,G3,G4の四つのグループに分けられ、各グループに識別子が付与された各距離データと代表距離がグループ記憶部23eに記憶される。代表距離はグループに含まれる距離データの最大値に設定される。
【0120】
この例でも、最小検出幅記憶部23fに記憶された物体検出最小幅の値は、走査式測距装置1からの距離が3.0m未満で3に設定され、走査式測距装置1からの距離が3.0m以上で2に設定されている。
【0121】
このような場合、監視対象物判定部23jは、グループG1,G2,G3,G4の何れのグループも監視対象物が存在すると判定することができないため、当該判定結果をシステム制御部24に出力することなく、グループ統合処理部23kを起動する。
【0122】
グループ統合処理部23kは、隣接する三つのグループG2,G3,G4のうち、グループG2,G3を纏めた一つの新たなグループG(2+3)を生成し、当該新たなグループG(2+3)に含まれる距離データの最大値を新たなグループの代表距離に設定し、再度監視対象物判定部23jによる判定を起動するように構成されている。
【0123】
監視対象物判定部23jは、グループG(2+3)の距離データの数3が、グループG(2+3)の代表距離3.6mに対応する物体検出最小幅2よりも大となるために、グループG(2+3)が監視対象物であると判定する。
【0124】
第二の態様による信号処理装置23,24では、走査式測距装置1から見て近傍に位置するノイズ源としての小さな物体の背後に何らかの別の物体が存在し、当該背後の別の物体の連続性が近傍の小さな物体によって断たれる場合であっても、背後の別の物体を監視対象物であると判定できるようになる。
【0125】
走査方向に沿って三つ以上のグループが隣接する場合には、グループ統合処理部23kは、以下に示す何れかの態様を好適に採用してグループを統合することができる。
【0126】
グループ生成処理部23iで生成された複数のグループのうち、或るグループに隣接するグループが走査方向に沿って両隣に存在する場合、隣接する2グループを構成する距離データの数の和が最大となるグループを統合して一つの新たなグループを生成することで、安全サイドで適正に監視対象物の有無が判定されるようになる。
【0127】
つまり、グループ統合処理部23kは、距離データの数が最大となる二つの隣接グループを纏めて一つの新たなグループを生成することが好ましい。
【0128】
図8(a)に示す場合、グループG2とグループG3を統合すると距離データの数の和が4になり、グループG3とグループG4を統合したときの距離データの数の和3よりも大きくなるので、グループG2とグループG3を新たなグループG(2+3)に統合するのである。尚、図7に示したように、何れに隣接するグループと統合しても、距離データの数の和が等しい場合には、何れか一方のグループと統合すればよい。
【0129】
また、グループ統合処理部23kは、走査方向に沿って複数のグループが隣接する場合、代表距離が短いグループと当該代表距離が短いグループに隣接する代表距離が長いグループとを纏めて一つの新たなグループを生成することが好ましい。
【0130】
このように代表距離が短いグループを基準にグループを統合すれば、走査式測距装置1から見て近傍に位置するグループと当該グループに隣接する遠方側のグループを統合して一つの新たなグループを生成されるので、遠方側のグループに対する物体検出最小幅の判定が適正に行なわれるようになる。
【0131】
さらに、グループ統合処理部23kは、代表距離が短いグループの両側に代表距離が長いグループが隣接する場合に、両側に位置する代表距離が長いグループの距離データから得られる統合基準距離の差分が第二の閾値以下の場合に、当該代表距離が短いグループと両側の代表距離が長い方のグループを纏めて一つの新たなグループを生成することが好ましい。
【0132】
統合基準距離とは、両側に位置する代表距離が長い二つのグループが同一の物体に対する距離であることの確からしさを判定するための距離である。統合基準距離として、代表距離が短いグループに最も近い走査角度方向の距離データ、代表距離、グループ内の距離データの平均値、中央値等の何れかを採用することができる。
【0133】
第二の閾値も、同一物と推定可能な閾値であり、監視対象物の表面の凹凸形状等に基づいて予め設定される値である。第二の閾値は上述した第一の閾値よりも大きな値に設定されることが好ましい。
【0134】
両側の代表距離が長いグループの統合基準距離の差分が第二の閾値以下の場合に、これらのグループに属する距離データが同一の物体に対する距離データであると判断して、これらのグループを統合することによって、遠方側のグループに対する物体検出最小幅の判定が適正に行なわれるようになる。
【0135】
図8(b)には、統合基準距離として、代表距離が短いグループに最も近い走査角度方向の距離データを採用する場合の例が示されている。グループG2の統合基準距離が3.3m、グループG4の統合基準距離が3.2mとなり、その差分が0.1mとなる。
【0136】
この例では、第二の閾値が0.3mに設定されている。従って、グループG2,G3,G4が新たなグループG(2+3+4)に統合される。
【0137】
図8(c)は、さらに他の例が示されている。この例では、走査方向に沿ってグループG2,G3,G4,G5が隣接している。グループG2の統合基準距離が2.5m、グループG3の統合基準距離が3.3m、グループG5の統合基準距離が3.2mとなる。グループG3,G5の統合基準距離の差分が0.1m、グループG2,G3の統合基準距離の差分が0.8mとなるので、当該差分が第二の閾値0.3m以下となるグループG3,G5を含めたグループG3,G4,G5が統合されて、新たなグループG(3+4+5)が生成される。
【0138】
以下に第三の態様を説明する。
第三の態様は、例えばTOF方式などのように、距離算出部230によって、同一の走査角度方向に複数の距離が算出可能な走査式測距装置に適用される態様である。機能ブロック構成は図3がベースになる。
【0139】
グループ生成処理部23iは、距離算出部230により算出された距離データが、監視対象領域内を示す値であり、且つ、当該距離データが測定光の走査方向に沿って連続する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成するように構成されている。
【0140】
そして、グループ生成処理部23iは、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定し、監視対象物判定部23jを起動するように構成されている。
【0141】
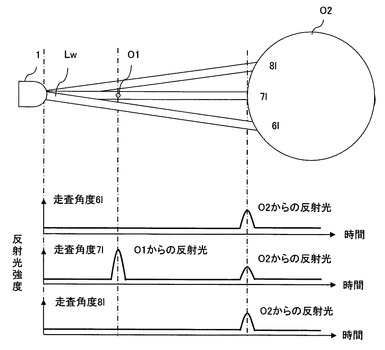
図9に示すように、投光部3から出力された測定光の光芒Lwが微小な物体O1よりも広い場合には、当該微小な物体O1よりも遠方の物体O2にも測定光が照射されるので、遠近双方の物体O1,O2からの反射光が受光部5で検出されるようになる。
【0142】
図8(d)には、図9に対応して距離算出部230によって同一の走査角度方向7lで二つの距離が算出される場合が示されている。つまり、距離算出部230によって、走査角度方向7lで物体O1に対応する距離1.2mと、物体O2に対応する距離3.2mが算出されている。
【0143】
例えば、第一の閾値が0.2mに設定されている場合、グループ生成処理部23iはグループG1,G2,G3の三つのグループを生成する。グループG2は走査角度方向5l〜9lで隣接する距離データの差分が第一の閾値以下となる距離データのグループである。
【0144】
このようにグループを生成すれば、走査式測距装置1から見て近傍に位置するノイズ源としての小さな物体O1の背後に何らかの別の物体O2が存在する場合であっても、当該背後の別の物体O2の連続性が近傍の小さな物体によって断たれることが無いため、グループ生成処理部23iによって背後の別の物体O2が一つのグループとして生成され、監視対象物を適正に検知することができるようになる。
【0145】
尚、遠近双方の物体からの反射光の一部が重畳する場合には、反射信号の二次微分信号の二回目の立ち上がりタイミングの前後で反射信号を分離し、それぞれの反射信号の立ち上がり時期を反射光の検出タイミングとして距離を算出すればよい。
【0146】
以上説明した何れの態様であっても、グループの代表距離として、そのグループに含まれる距離データの最大値を設定することが好ましい。グループに含まれる距離データの最大値を代表距離に設定すれば、或る走査角度で、走査式測距装置の遠方側に位置する物体への測定光の照射が近傍側の微小物体で遮られる場合に、遠方に位置する物体の距離に対応した適切な物体検出最小幅の判定ができるようになる。
【0147】
また、物体検出最小幅は、代表距離が長くなるほど小さくなるように設定されていることが好ましい。同じサイズの物体であっても、走査式測距装置の近傍では連続して検出される走査角度の数が多く、または最大走査角度が大きく、走査式測距装置の遠方では連続して検出される走査角度の数が少なく、または最大走査角度が小さくなる。そこで、グループの代表距離が長くなるほど物体検出最小幅を小さくすれば、走査式測距装置を基準に遠近何れの位置に存在する物体であっても、適正に監視対象物であるか否かを判定できるようになる。
【0148】
上述した実施形態では、走査式測距装置1が、偏向光学系4によって固定軸心Pと直交する平面に沿って測定光が一次元的に走査される構成について説明したが、本発明は、測定光が二次元的に走査され、物体までの距離が三次元で測定可能な走査式測距装置にも適用可能である。
【0149】
例えば、上述した走査式測距装置1に、軸心Pを揺動させる機構を組み込むことにより、測定光を二次元的に走査可能な偏向光学系を実現することができる。
【0150】
また、測定光をXY平面上で二次元に走査する測距装置や、ランダムに2次元走査する測距装置、またCCDを2個使用した三角法による走査など複数走査角を同時に測距可能な測距装置にも本発明の技術思想を適用することができる。
【0151】
上述した第一の態様を採用して測定光を二次元的に走査する場合にも、距離算出部により算出され、且つ、監視対象領域内を示す距離データが、測定光の走査方向を問わずに、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成すればよい。
【0152】
そして、グループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定すればよい。この場合、物体検出最小幅を、一定の二次元の領域を占める距離データの個数として設定することも可能である。
【0153】
上述した実施形態は、本発明による走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置の一例であり、走査式測距装置の具体的構造、信号処理装置の具体的な回路構成、信号処理方法を実現するソフトウェアの具体的な手順等は、本発明による作用効果を奏する範囲において適宜変更設計できることはいうまでもなく、本発明の技術的範囲が上述の例に限定されるものではない。
【符号の説明】
【0154】
1:走査式測距装置
3:投光部
5:受光部
4:走査部
23:信号処理部(信号処理装置)
23a:測距演算部
23b:補正処理部
23c:補正データ記憶部
23d:走査角度/距離記憶部
23e:グループ記憶部
23f:最小検出幅設定部
23g:監視対象領域設定部
23h:領域判定処理部
23i:グループ生成処理部
23j:監視対象物判定部
23k:グループ統合処理部
230:距離算出部(信号処理装置)
231:監視対象物検出(信号処理装置)
【技術分野】
【0001】
本発明は、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置に関する。
【背景技術】
【0002】
少なくともTOF(Time of Flight)方式及びAM(amplitude modulation)方式の何れかが採用された走査式測距装置が、ロボットや無人搬送車の視覚センサ、或いは、ドアの開閉センサや監視対象領域への侵入者の有無を検出する監視センサ、さらには、危険な装置に人や物が近づくのを検出し、機械を安全に停止する安全センサ等に利用されている。
【0003】
TOF方式は、特許文献1に開示されているように、監視対象領域に向けて出力したパルス状の測定光と、測定光に対する物体からの反射光との検出時間差Δtに基づいて、走査式測距装置から監視対象領域内に存在する物体までの距離Dを算出する方式で、以下の数式を用いて距離Dが算出される。尚、式中、Cは光速である。
D=Δt・C/2
【0004】
AM方式は、特許文献2に開示されているように、測定光が振幅変調され、監視対象領域に向けて出力した測定光と、測定光に対する物体からの反射光との位相差Δφに基づいて、走査式測距装置から監視対象領域内に存在する物体までの距離Dを算出する方式で、以下の数式を用いて距離Dが算出される。尚、式中、Cは光速、fは変調周波数である。
D=Δφ・C/(4π・f)
【0005】
また、TOF方式とAM方式の双方を採用して、振幅変調した測定光をパルス状に出力することにより、振幅変調光の一波長以上の長い距離をTOF方式で算出し、振幅変調光の一波長よりも短い距離をAM方式で算出するバースト変調方式の走査式測距装置も提案されている。
【0006】
さらに、特許文献3には、レーザセンサを用いて対象の領域を照射し、得られた測距データを処理装置で処理することによって物体の位置を検知する物体検知システムであって、該レーザセンサによって該領域の背景に相当する物体の情報を取得する背景データ取得手段と、該レーザセンサによって該領域内にある物体の経時的な測距データを取得して該物体の位置を検知する位置検知手段と、該領域における該物体の存在位置を検知する物体検知手段とを備えた物体検知システムが提案されている。
【0007】
何れの場合にも、走査式測距装置の信号処理装置には、測定光と反射光との間の所定の相関関係、例えば両者の遅延時間または位相差と距離との間に見られる相関関係に基づいて、所定の走査角度毎に走査式測距装置から監視対象領域内に存在する物体までの距離を算出する距離算出部を備えている。
【0008】
更に特許文献4には、一定の周波数でパルス変調された照射光を対象物に照射し、その反射光をPSD(Position Sensing Device)等の受光素子で受光し、その受光位置に応じて生じる光電変換信号に基づいて、対象物までの距離を測距する三角測距の原理を用いた測距装置が提案されている。PSD(Position Sensing Device)に替えて二次元の撮像デバイスを用いることも可能である。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2007−256191号公報
【特許文献2】特開2002−90454号公報
【特許文献3】特開2009−85927号公報
【特許文献4】特開平06−288764号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、何れの方式を採用する走査式測距装置であっても、物体からの反射光に基づいて監視対象領域内に監視対象物が存在するか否かを正確に判定するのは容易ではなく、誤検知する虞があるという問題があった。
【0011】
例えば、監視対象領域内で浮遊する微小な埃や、監視対象領域内で飛び回る微小な虫等からの反射光を監視対象物からの反射光と誤認する場合や、監視対象領域内に設置された他の走査式測距装置からの測定光を監視対象物からの反射光と誤認する虞がある。
【0012】
更に、監視対象領域が野外に区画される場合には、木の葉や雨滴等からの反射光を監視対象物からの反射光と誤認する虞もある。
【0013】
そこで、物体が測定光の走査方向に沿って所定幅以上、言い換えると所定角度以上連続して検出される場合に、その物体が監視対象物であると判定し、所定幅未満、言い換えると所定角度未満の物体をノイズと認識して監視対象物の有無の判定対象から排除することが考えられる。
【0014】
しかし、走査式測距装置の近傍に小さな虫等のノイズ源が存在する場合には、その背後に存在するかも知れない監視対象物の一部または全部がノイズ源に隠されて、所定幅以上の物体として認識できない場合が発生するという問題があった。
【0015】
具体的に説明する。図11(a),(b)の上段には、走査式測距装置1から所定の距離に設定された扇形の監視対象領域に向けて、所定周期で測定光を繰り返し走査し、走査角度θ毎に測定光に対する物体からの反射光を検知することにより、人間の腕程度の大きさの監視対象物を検出する場合の説明図が示されている。図中、ハッチングされた大きな円が監視対象物T、黒く塗り潰された小さな円がノイズとなる微小物であり、符号1l,2l,3l,・・・,10l,11lは走査角度方向(「ステップ」とも記す。)を示している。
【0016】
図11(a),(b)の下段には、遠方側で走査角度方向に2回連続して同等の距離が算出されると監視対象物「有」と判定し、近傍側で走査角度方向に3回連続して同等の距離が算出されると監視対象物「有」と判定する場合の判定結果がテーブル表示されている。
【0017】
テーブルには、各走査角度方向に対する「計測結果」、「連続数」、「監視対象物判定結果」の各欄が設けられている。「計測結果」の欄には、物体までの距離が監視対象領域内の距離であり、走査式測距装置の近傍側に位置する微小物体に対する距離である場合に「近」、走査式測距装置の遠方側に位置する監視対象物Tに対する距離である場合に「遠」、監視対象領域外の距離であるか距離が算出されなかった場合に「無」と記されている。「連続数」の欄には、走査方向に沿って連続する「遠」の数、または「近」の数が記されている。「監視対象物判定結果」の欄には「有」「無」の何れかの判定結果が記されている。
【0018】
図11(a)に示す状況では、走査式測距装置の遠方側に監視対象物Tが存在すると判定することができるが、図11(b)に示す状況では、走査式測距装置の遠方側に監視対象物Tが存在すると判定することができない。近傍側に位置する微小物体によって遠方側の監視対象物Tの連続性が損なわれるためである。
【0019】
走査式測距装置を安全センサとして使用する場合には、機械の制御装置が、当該走査式測距装置から出力される監視対象物検知信号に基づいて、監視対象領域に監視対象物が検出されたと判断すると、安全のために機械を自動停止させる必要がある。しかし、このような誤認識によって走査式測距装置から監視対象物検知信号が出力されない場合があるという不都合な事態が発生する。
【0020】
本発明の目的は、上述した問題点に鑑み、ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置を提供する点にある。
【課題を解決するための手段】
【0021】
上述の目的を達成するため、本発明による走査式測距装置の信号処理装置の第一の特徴構成は、特許請求の範囲の書類の請求項1に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出部と、前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、を備えている点にある。
【0022】
監視対象領域内を走査する測定光に対応する反射光が走査式測距装置で検知されると、当該測定光と反射光との間の所定の相関関係に基づいて、距離算出部によって走査角度毎に距離が算出される。尚、或る走査角度方向に物体が存在しない場合には、反射光が検知されないため、その走査角度で距離は算出されない。
【0023】
距離算出部によって算出された距離が監視対象領域内を示す値であれば、対応する物体が監視対象領域内に存在することになる。そして、このような距離が隣接する複数の走査角度方向に存在すると、ある程度のサイズの物体が存在すると仮定することができる。当然のことであるが、同じサイズの物体であっても、走査式測距装置の近傍では連続して検出される走査角度の数が多く、走査式測距装置の遠方では連続して検出される走査角度の数が少なくなる。
【0024】
そこで、グループ生成処理部によって、このような関係を示す複数の距離データが一纏めにグループ化され、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値がそのグループの代表距離に設定される。
【0025】
そして、監視対象物判定部によって、グループに含まれる距離データの個数または最大走査角度で定義される物体検出幅、つまり走査方向に沿った物体のサイズが、その代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定される。尚、物体検出最小幅を示す個数未満または走査角度未満の距離データが纏められたグループは、監視対象物ではなくノイズであると判定されることになる。
【0026】
監視対象領域内に存在する物体が微小な埃や虫、或は雨滴であれば、隣接する走査角度方向で連続して距離が算出される確率は非常に小さくなる。そこで、或る程度の幅で連続する走査角度方向に、略等しい距離データが連続して算出される場合に、監視対象物が存在すると判定することも可能である。しかし、この場合、走査式測距装置から見て近傍に位置するノイズ源としての小さな物体の背後に何らかの別の物体が存在すると、当該背後の別の物体の連続性が近傍の小さな物体によって断たれるため、背後の別の物体が監視対象物であると判定されない虞がある。
【0027】
上述の第一の特徴構成を備えた信号処理装置では、走査方向に沿って連続する走査角度で連続して算出された距離データが、その値に関係なくグループ化されるので、背後の別の物体の連続性が近傍の小さな物体によって断たれるような不都合な事態が生じることが無い。しかも、監視対象物であるか否かを判定するためのグループの代表距離が、グループ内の複数の距離データの平均値または中央値から当該距離データの最大値迄の何れかの値に設定されるので、走査式測距装置から見て近傍側よりも遠方側を重視した物体検出最小幅の判定ができるようになる。
【0028】
同第二の特徴構成は、同請求項2に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出部と、前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、各グループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されず、複数のグループが隣接する場合に、隣接する二つのグループを纏めた一つの新たなグループを生成し、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値を新たなグループの代表距離に設定するグループ統合処理部と、前記グループ生成処理部または前記グループ統合処理部で生成されたグループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、を備えている点にある。
【0029】
第二の特徴構成を備えた信号処理装置では、距離算出部により算出された距離データが、監視対象領域内を示す値であること、隣接する複数の走査角度方向に存在すること、そして隣接する走査角度方向の距離データの差分が第一の閾値以下となること、という三つの条件を満たす場合に、グループ生成処理部によって複数の距離データがグループ化される。そして、第一の特徴構成と同様にして監視対象物判定部によって監視対象物が存在するか否かが判定される。
【0030】
しかし、走査式測距装置から見て近傍に位置するノイズ源としての小さな物体の背後に何らかの別の物体が存在すると、当該背後の別の物体の連続性が近傍の小さな物体によって断たれるため、グループ生成処理部によって背後の別の物体が複数のグループとして生成されることになる。そして、監視対象物判定部によってグループ毎に物体検出最小幅の判定が行なわれると、背後の別の物体が監視対象物であると判定されない虞がある。
【0031】
そこで、このような場合に、グループ統合処理部によって、隣接する二つのグループを纏めた一つの新たなグループが生成され、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値が新たなグループの代表距離に設定される。監視対象物判定部によって、このように統合されたグループに対する物体検出最小幅の判定が行なわれることで、適正に監視対象物の有無が判定されるようになる。
【0032】
同第三の特徴構成は、同請求項3に記載した通り、上述の第二の特徴構成に加えて、前記グループ統合処理部は、距離データの数が最大となる二つの隣接グループを纏めて一つの新たなグループを生成する点にある。
【0033】
グループ生成処理部で生成された複数のグループのうち、或るグループに隣接するグループが走査方向に沿って両隣に存在する場合、隣接する2グループを構成する距離データの数の和が最大となるグループを統合して一つの新たなグループを生成することで、安全サイドで適正に監視対象物の有無が判定されるようになる。
【0034】
同第四の特徴構成は、同請求項4に記載した通り、上述の第二の特徴構成に加えて、前記グループ統合処理部は、代表距離が短いグループと当該代表距離が短いグループに隣接する代表距離が長いグループとを纏めて一つの新たなグループを生成する点にある。
【0035】
走査式測距装置から見て近傍に位置するグループと当該グループに隣接する遠方側のグループを統合して一つの新たなグループを生成することで、遠方側のグループに対する物体検出最小幅の判定が適正に行なわれるようになる。
【0036】
同第五の特徴構成は、同請求項5に記載した通り、上述の第二の特徴構成に加えて、前記グループ統合処理部は、代表距離が短いグループの両側に代表距離が長いグループが隣接する場合に、両側の代表距離が長いグループの距離データから得られる統合基準距離の差分が第二の閾値以下の場合に、当該代表距離が短いグループと両側の代表距離が長いグループを纏めて一つの新たなグループを生成する点にある。
【0037】
両側の代表距離が長いグループの統合基準距離の差分が第二の閾値以下の場合に、これらのグループに属する距離データが同一の物体に対する距離データであると判断して、これらのグループを統合することによって、遠方側のグループに対する物体検出最小幅の判定が適正に行なわれるようになる。統合基準距離とは、両側の代表距離が長い2グループが同一の物体に対する距離であることの確からしさを判定するための距離であり、代表距離が短いグループに最も近い走査角度方向の距離データ、代表距離、グループ内の距離データの平均値、中央値等の何れかを採用することができる。
【0038】
同第六の特徴構成は、同請求項6に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの一または複数の距離を算出する距離算出部と、前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、を備えている点にある。
【0039】
走査式測距装置から走査される測定光の光芒、つまり測定光を形成する光線束の径が近傍に存在する微小物体のサイズよりも大きい場合に、当該微小物体より遠方に測定光の一部が走査される。そのときに微小物体の背景に少なくとも一つの他の物体が存在していると、微小物体からの反射光とその背景に存在する物体からの反射光の二つの反射光が走査式測距装置によって検知され、距離算出部によって少なくとも二つの距離が算出される場合がある。
【0040】
第六の特徴構成によれば、距離算出部により算出された距離データが、監視対象領域内を示す値であること、隣接する複数の走査角度方向に存在すること、そして隣接する走査角度方向の距離データの差分が第一の閾値以下となること、という三つの条件を満たす場合に、グループ生成処理部によって複数の距離データがグループ化される。
【0041】
例えば、走査式測距装置から見て近傍に位置するノイズ源としての小さな物体の背後に何らかの別の物体が存在する場合であっても、当該背後の別の物体の連続性が近傍の小さな物体によって断たれることが無いため、グループ生成処理部によって背後の別の物体が一つのグループとして生成されることになる。
従って、微小なノイズ物体や他の測距装置からのノイズ光が存在する環境であっても、監視対象物を適正に検知することができるのである。
【0042】
同第七の特徴構成は、同請求項7に記載した通り、上述の第一から第六の何れかの特徴構成に加えて、前記代表距離に、前記グループに含まれる距離データの最大値が設定される点にある。
【0043】
グループに含まれる距離データの最大値を代表距離に設定すれば、或る走査角度で、走査式測距装置の遠方側に位置する物体への測定光の照射が近傍側の微小物体で遮られる場合に、遠方に位置する物体の距離に対応した適切な物体検出最小幅の判定ができるようになる。
【0044】
同第八の特徴構成は、同請求項8に記載した通り、上述の第一から第七の何れかの特徴構成に加えて、前記物体検出最小幅を示す値は、代表距離が長くなるほど小さくなるように設定されている点にある。
【0045】
既に説明したように、同じサイズの物体であっても、走査式測距装置の近傍では連続して検出される走査角度の数が多く、または最大走査角度が大きく、走査式測距装置の遠方では連続して検出される走査角度の数が少なく、または最大走査角度が小さくなる。そこで、グループの代表距離が長くなるほど物体検出最小幅を示す値を小さくすれば、走査式測距装置を基準に遠近何れの位置に存在する物体であっても、適正に監視対象物であるか否かを判定できるようになる。
【0046】
本発明による走査式測距装置の特徴構成は、同請求項9に記載した通り、上述した第一から第八の何れかの特徴構成を備えた走査式測距装置の信号処理装置が組み込まれている点にあり、真に検出すべき監視対象物を適正に検知できる走査式測距装置を実現することができるようになる。
【0047】
本発明による走査式測距装置の信号処理方法の第一の特徴構成は、同請求項10に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出ステップと、前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、を備えている点にある。
【0048】
同第二の特徴構成は、同請求項11に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出ステップと、前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、各グループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されず、複数のグループが隣接する場合に、隣接する二つのグループを纏めた一つの新たなグループを生成し、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値を新たなグループの代表距離に設定するグループ統合処理ステップと、前記グループ生成処理ステップまたは前記グループ統合処理ステップで生成されたグループに対する前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、を備えている点にある。
【0049】
同第三の特徴構成は、同請求項12に記載した通り、監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの一または複数の距離を算出する距離算出ステップと、前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、を備えている点にある。
【発明の効果】
【0050】
以上説明した通り、本発明によれば、ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置を提供することができるようになった。
【図面の簡単な説明】
【0051】
【図1】本発明による走査式測距装置の全体構成を示す概略縦断面図
【図2】走査式測距装置に組み込まれる信号処理装置を含む全体の機能ブロック構成図
【図3】信号処理部とシステム制御部とで構成される信号処理装置の第一及び第三の態様を示す機能ブロック構成図
【図4】信号処理装置で実行される全体の処理を説明するフローチャート
【図5】信号処理装置の第一の態様を示し、グループ生成処理部による処理内容を示す説明図
【図6】信号処理装置の第二の態様を示す機能ブロック構成図
【図7】信号処理装置の第二の態様を示し、グループ生成処理部及びグループ統合処理部による処理内容を示す説明図
【図8】(a),(b),(c)は、信号処理装置の第二の態様を示し、グループ生成処理部及びグループ統合処理部による処理内容を示す説明、(d)は信号処理装置の第三の態様を示し、グループ生成処理部による処理内容を示す説明図
【図9】信号処理装置の第三の態様の前提事項である同一の操作角度方向に複数の距離が算出可能な原理の説明図
【図10】別実施形態を示す第一及び第二偏光ミラーの説明図
【図11】従来技術の説明図
【発明を実施するための形態】
【0052】
以下、本発明による走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置を図面に基づいて説明する。以下の例では、測定光の光源に赤外半導体レーザが用いられ、TOF方式によって物体までの距離を算出する距離算出部等を備えた信号処理装置が組み込まれ、安全センサとして用いられる走査式測距装置について説明する。
【0053】
当該走査式測距装置によって、予め設定された監視対象領域に侵入者や搬送車両等のある程度のサイズの障害物が監視対象として検知されると、その旨の信号が外部装置に出力される。外部装置は、当該信号に基づいて、例えば安全のために機器を停止する等の所定の制御を行なう。
【0054】
尚、半導体レーザ以外の種類のレーザやLED等の他の種類の光源を用いた走査式測距装置にも本発明を適用することができる。また、距離算出方式としてTOF方式以外の方式、例えばAM方式や、TOF方式とAM方式の双方を採用したバースト変調方式を採用する距離算出部にも本発明を適用することができる。さらには、PSD(Position Sensing Device)やCMOSタイプの二次元撮像素子等の受光素子で反射光を受光し、その受光位置に応じて生じる光電変換信号に基づいて、対象物までの距離を測距する三角測距の原理を用いた測距装置にも本発明を適用することができる。
【0055】
図1にはこのような走査式測距装置が例示されている。走査式測距装置1は、一対の投光部3及び受光部5を収容する円筒状のケーシング2と、ケーシング2の周方向に沿って配置された弧状の光学窓2aを備え、投光部3から出力された測定光を円筒状ケーシングの軸心Pと直交する方向に偏向反射する第一偏向ミラー9、及び、被測定物Tからの反射光を受光部5に向けて偏向反射する第二偏向ミラー10を軸心P周りに回転して、測定光を軸心Pと直交する平面上で回転走査する偏向光学系4を備えている。
【0056】
ケーシング2の内壁面は迷光を吸収する暗幕等の吸光部材で被覆され、軸心Pに沿って対向配置された投光部3と受光部5の間に、偏向光学系4が配置されている。
【0057】
投光部3は、赤外半導体レーザでなる発光素子と、発光素子から出力された光ビームを平行光に形成する光学レンズを備えて構成され、ケーシング2の上壁内側に固定されている。
【0058】
受光部5は、反射光を検出するアバランシェフォトダイオードでなる受光素子を備えて構成され、ケーシング2に固定された中空軸13上の支持板上に固定されている。
【0059】
偏向光学系4は、第一偏向ミラー9及び第二偏向ミラー10が取り付けられた天面8bと、反射光を受光部5で集光する受光レンズ14が取り付けられた周壁部8aを備えた円筒状の回転体8と、回転体8を一方向に回転駆動するモータ11を備えている。
【0060】
下端部が縮径された回転体8は、その内周面に備えた軸受12を介して中空軸13に回転可能に支承され、縮径部の外周面にモータ11の回転子となるマグネット11bが取り付けられている。当該回転子と、当該回転子に対向配置されたコイル11aでなる固定子によりモータ11が構成され、固定子のカバーがケーシング2に固定された中空軸13に取り付けられている。
【0061】
投光部3から光軸L1に沿って出射された測定光が、第一偏向ミラー9で光軸L1と直交する光軸L2に偏向され、光学窓2aを通過して測定対象空間に向けて照射される。測定対象空間に存在する被測定物Tからの反射光が、光軸L2と平行な光軸L3に沿って光学窓2aを通過して受光レンズ14に入光し、第二偏向ミラー10で光軸L3と直交する光軸L4に偏向され、受光部5に集光される。
【0062】
第一偏向ミラー9で偏向された測定光が光学窓2aの上方領域を透過し、被測定物Tからの反射光が光学窓2bの下方領域を透過する。
【0063】
モータ11で回転駆動される偏向光学系4により、測定光が光学窓2aを介して測定対象空間に走査される範囲、具体的には上述した軸心Pを基準とする約270度の角度範囲が計測用走査角度領域となり、測定光がケーシング2に遮られて測定対象空間に出射されない角度領域が非計測用走査角度領域となる。
【0064】
つまり、偏向光学系4により、投光部3から出力された測定光を、光学窓2aを介して測定対象空間に周期的に偏向走査する走査部が構成されている。
【0065】
図10に示すように、第一偏光ミラー9と第二偏光ミラー10を樹脂または光学ガラスで一体成形してもよい。この例では、第一偏向面91により光軸L1に対して測定光を測定対象領域に向けて90度偏向させる第一偏向ミラー9が構成され、第二偏向面92により反射光を光軸L4に沿った受光部5に向けて90度偏向させる第二偏向ミラー10が構成されている。
【0066】
そして、第二偏向面92の上端側中央部が切り欠かれ、当該切欠部95に第一偏向ミラー9が延出形成されている。このような構成を採用することによって、装置の小型化を図ることができる。
【0067】
周方向に複数のスリットが形成された円盤状のスリット板15aが、回転体8の周壁部8aに取り付けられるとともに、当該スリットを検出するフォトインタラプタ15bがケーシング2の内壁に取り付けられ、これらにより偏向光学系4の走査角度を検出する走査角度検出部15が構成されている。
【0068】
スリット板15aに形成されるスリットは、測定光が非走査角度領域の中心に向けて照射される基準位置を除いて均等間隔で形成され、基準位置ではスリット間隔が他の間隔より狭い間隔に形成されている。従って、偏向光学系4の回転に伴なって走査角度検出部15から出力されるパルスのパルス幅に基づいて、基準位置から偏向光学系4の回転角度位置が把握できるように構成されている。
【0069】
非走査角度領域の中心には、距離補正用の基準光学系としてのプリズム16が設けられ、当該プリズム16を介して受光部5で検知される反射光に基づいて、補正用の基準距離が求められる。
【0070】
ケーシング2の底部には、装置を駆動して被測定物Tまでの距離を算出する信号処理回路20を備えた制御基板17が収容されている。
【0071】
図2に示すように、信号処理回路20には、発光素子3aを駆動する駆動回路3b、反射光が受光素子5aで光電変換された反射信号を増幅する増幅回路5b、モータ制御回路21、A/D変換部22、信号処理部23、システム制御部24を備えている。信号処理部23及びシステム制御部24によって、本発明による信号処理装置が構成されている。
【0072】
システム制御部24には、所定の制御プログラムに基づいて動作するマイクロコンピュータが設けられ、当該マイクロコンピュータによって信号処理部23、モータ制御回路21等が制御される。
【0073】
システム制御部24は、走査角度検出部15から入力されるエンコーダパルスに基づいて、走査角度つまり測定光の照射方向を検出するとともに、偏向光学系4によって測定光が所定の一定速度で周期的に測定対象空間に走査されるようにモータ制御回路21を制御する。
【0074】
そして、信号処理部23から入力される距離と、走査角度検出部15を介して検出した走査角度等の測定情報、或いは、監視対象領域に障害物が存在することを表す障害物検知信号を、インタフェースを介して接続された外部装置に出力する。
【0075】
尚、信号処理装置は、ケーシング2の内部に収容され、走査式測距装置1と一体で構成される以外に、ケーシング2の外部に設置され、走査式測距装置1と別体で構成されていてもよい。後者の場合には、信号処理装置はA/D変換部22等が搭載されたケーシング2内部の制御基板17と信号線を介して接続され、或は無線通信部を介して接続される。
【0076】
走査角度検出部15から入力されるエンコーダパルスに同期して、信号処理部23から駆動回路3bに出力される駆動パルス信号S1により赤外半導体レーザ3aがパルス駆動され、測定対象空間にパルス状の測定光S2が照射される。
【0077】
当該測定光S2が被測定物Tに照射され、被測定物Tからの反射光S3がアバランシェフォトダイオード5aで光電変換され、さらに増幅回路5bで増幅された反射信号S4がA/D変換部22に入力される。
【0078】
A/D変換部22でA/D変換されたデジタルの反射信号が信号処理部23に入力され、信号処理部23で駆動パルス信号S1と反射信号の時間差Δtが求められ、以下の式に基づいて被測定物T迄の仮の距離D1が算出される。
D1=Δt・C/2 (但し、Cは光速である。)
【0079】
ここで、時間差Δtとは測定光に対する反射光の遅延時間をいい、上述の例では測定光の照射時期を駆動パルス信号S1の立ち上がり時期で代用しているが、測定光を検知する光電センサを用いて測定光そのものの立ち上がり時期を検知してもよい。
【0080】
一方、走査角度検出部15から入力されるエンコーダパルスが基準位置を示すときに、測定光がプリズム16に照射され、アバランシェフォトダイオード5aで検出されたプリズム16からの反射光S3に基づく時間差Δt´に対応する基準距離D2が以下の式に基づいて算出される。
D2=Δt´・C/2 (但し、Cは光速である。)
【0081】
被測定物迄の距離Dが、D1−D2によって算出される。当該基準距離D2は、走査式測距装置1に組み込まれた赤外半導体レーザ3a、駆動回路3b、アバランシェフォトダイオード5a等の特性ばらつきや、光学系の機差による計測距離のばらつきを吸収して、被測定物迄の正確な距離を算出するための補正値となる。
【0082】
ところで、反射信号S4の立上り時期を検知するために所定の閾値電圧と比較する比較器を設ける場合、同じ時期に発生する反射信号S4であっても、その信号強度によって立ち上がり波形の傾きが異なるために、比較器からの出力時期が変動して、反射信号S4の立上り時期を正確に検知できない虞がある。
【0083】
そのため、信号処理部23は、反射信号S4を一次微分し、一次微分反射信号の立上り時期を基準に当該一次微分反射信号の正領域の重心位置を算出し、当該重心位置に対応する時期を反射光S3の検出時期として求めるように構成されている。
【0084】
以下、本願発明の信号処理装置の第一から第三の三つの態様を説明する。
先ず、第一の態様について詳述する。
【0085】
図3に示すように、信号処理部23は信号処理用のゲートアレイやデジタルシグナルプロセッサ、さらには各種の演算のためのデータ記憶部となる複数のレジスタ等を備えたASIC等の集積回路で構成されている。
【0086】
これら集積回路によって、上述した被測定物迄の距離Dを算出する距離算出部230と、距離算出部230で算出された距離情報等に基づいて障害となる監視対象物を検出する監視対象物検出部231と、駆動回路3bや距離算出部230等を駆動するためのクロック信号を生成するパルス信号生成部232の各機能ブロックが構成されている。
【0087】
距離算出部230は、上述した距離D1,D2を算出する測距演算部23aと、算出された補正距離D2を記憶する補正データ記憶部23cと、上述した距離補正演算を行なう補正処理部23bを備えた機能ブロックである。
【0088】
距離算出部230は、測定光と反射光との間の所定の相関関係に基づいて、所定の走査角度毎に当該走査式測距装置1から監視対象領域内に存在する物体までの距離を算出する処理を測定光の走査周期で繰り返す。所定の相関関係とは、TOF方式では測定光に対する反射光の遅延時間と距離との相関関係、AM方式では測定光に対する反射光の位相差と距離との相関関係をいう。
【0089】
監視対象物検出部231は、監視対象領域設定部23gと、領域判定部23hと、グループ生成処理部23iと、監視対象物判定部23jと、走査角度/距離記憶部23dと、グループ記憶部23eと、最小検出幅設定部23fを備えた機能ブロックである。
【0090】
監視対象物検出部231は、走査式測距装置1で検知された物体からの反射光が、監視対象物以外の微小な埃や虫等から反射したノイズ光であるか、監視対象領域内に進入または侵入した監視対象物から反射した信号光であるか否かを判定して、適正に監視対象物を検出するために設けられている。
【0091】
監視対象領域設定部23gは、走査式測距装置1により監視すべき監視対象領域の境界を規定する領域データが記憶されたメモリを備えている。当該領域データは、システム制御部24に接続されたコンピュータ等の外部装置から入力され、システム制御部24を介して当該メモリに予め記憶されている。
【0092】
走査角度/距離記憶部23dには、距離算出部230で算出された物体の走査角度と距離が走査周期毎に記憶される。領域判定部23hは、走査角度/距離記憶部23dに記憶された走査周期毎の物体の距離が、監視対象領域設定部23gのメモリに記憶された監視対象領域の内部に位置する距離であるか否かを判定し、監視対象領域の内部に位置する場合にのみ、その距離と走査角度をグループ生成処理部23iに引き渡す。
【0093】
グループ生成処理部23iは、測定光の走査方向に沿って連続する複数の走査角度方向に存在する距離データを一つに纏めたグループを生成し、各距離データにグループの識別子を付与するとともに当該グループの代表距離を設定して、それらのデータをグループ記憶部23eに記憶する。
【0094】
最小検出幅記憶部23fには、走査式測距装置1からの距離に応じて予め設定された物体検出最小幅を示す距離データの個数が記憶されている。物体検出最小幅とは、物体が監視対象物であるかノイズであるかを判定するための測定光の走査方向に沿った物体のサイズであり、それを示す距離データの個数は走査式測距装置1からの距離が長くなるほど小さくなるように設定されている。物体検出最小幅を示す距離データの個数は、システム制御部24に接続された外部装置から予め入力されて記憶される。
【0095】
グループの代表距離とは、最小検出幅記憶部23fに記憶されている複数の物体検出最小幅の一つを特定するための値で、グループに含まれる距離データの平均値または中央値の何れか、または、その値から当該距離データの最大値迄の何れかの値が設定される。
【0096】
尚、最小検出幅記憶部23fに記憶される物体検出最小幅を示す値が、最大走査角度で定義された角度データであってもよい。この場合にも、走査式測距装置1からの距離が長くなるほど小さくなるように設定される。以下の説明では物体検出最小幅が距離データの個数である場合を説明するが、角度データであっても同様の処理が適用できる。
【0097】
グループ生成処理部23iによって走査周期毎にグループ化処理が行なわれると監視対象物判定部23jが起動される。監視対象物判定部23jは、各グループの表距離に応じて最小検出幅記憶部23fから物体検出最小幅を示す個数を読み出して、各グループの物体検出幅である距離データの個数が、物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定し、各グループの物体検出幅である距離データの個数が、物体検出最小幅を示す個数未満となる場合に、監視対象物が存在しないと判定する。
【0098】
監視対象物検出部231によって、監視対象物が存在することが検出されると、その旨の信号がシステム制御部24に出力され、システム制御部24から外部装置にオン状態の監視対象物検知信号が出力される。
【0099】
監視対象物検出部231によって、監視対象物が存在しないことが検出されると、その旨の信号がシステム制御部24に出力され、システム制御部24から外部装置にオフ状態の監視対象物検知信号が出力される。つまり、システム制御部24が監視対象物検知信号を外部に出力する信号出力部となる。
【0100】
外部装置は、システム制御部24から監視対象物検知信号が入力されると、監視対象領域内に設置されている装置を安全のために停止制御する等の予め設定された所定の処理を実行する。
【0101】
図4には、上述した信号処理装置23,24で実行される監視対象物検出処理のフローチャートが示されている。距離算出部230によって物体に対する距離算出処理が実行され、その値が走査角度/距離記憶部23dに記憶される(S1)。領域判定処理部23hによって領域判定処理が実行され(S3)、監視対象領域内の走査角度/距離データがグループ生成処理部23iに引き渡される。
【0102】
グループ生成処理部23iによってグループ生成処理が実行され(S3)、監視対象物判定処理部23jによって監視対象物判定処理が実行され(S4)、システム制御部24によって障害物検知信号出力処理が実行される(S5)。
【0103】
図5には、走査式測距装置1から最大距離が10mの値に設定された扇形の監視対象領域に向けて、走査周期30msec.で測定光を繰り返し走査し、走査角度θ(=0.25°)毎に測定光に対する物体からの反射光を検知することにより、人間の腕程度の大きさの監視対象物を検出する場合の説明図が示されている。図中、ハッチングされた大きな長円が監視対象物T、黒く塗り潰された小さな円がノイズとなる微小物である。
【0104】
この例では、走査式測距装置1から10m離れた位置で、走査角度θが0.25°の幅が約4.36cmとなる。つまり、隣接する走査角度で連続して距離10mの位置に物体Tが検知されると少なくとも人間の腕程度の物体が存在することが判定できる。
【0105】
図5の上段には、走査式測距装置1から反時計周りに測定光が回転走査されたときの状態が示されている。符号1l,2l,3l,・・・,10l,11lは走査角度方向(「ステップ」とも記す。)を示している。
【0106】
図5の下段には、走査角度方向と算出距離のテーブルが示されている。この例では、走査角度方向2l,3lで微小物体(図中、黒丸で示す)に対する距離が算出され、走査角度方向5l,6l,8l,9lで監視対象物Tに対する距離が算出され、走査角度方向7lで他の微小物体(図中、黒丸で示す)に対する距離が算出されている。
【0107】
また、距離算出部230によって算出された距離が監視対象外であるか、或は距離が算出されなかった場合に、算出距離の枠がハッチングされている。当該枠内の数値は監視対象領域の最大距離である。
【0108】
この例では、グループ生成処理部23iによって、距離データがグループG1とグループG2の二つのグループに分けられ、グループG1またはグループG2の識別子が付与された各距離データと代表距離がグループ記憶部23eに記憶される。代表距離はグループに含まれる距離データの最大値に設定され、グループG1の代表距離が2.5mに、グループG2の代表距離が3.6mに設定される。
【0109】
最小検出幅記憶部23fには、走査式測距装置1からの距離に応じた物体検出最小幅が記憶されている。この例では、物体検出最小幅の値は、走査式測距装置1からの距離が3.0m未満で3に設定され、走査式測距装置1からの距離が3.0m以上で2に設定されている。
【0110】
監視対象物判定部23jは、グループG1の距離データの数2が、グループG1の代表距離2.5mに対応する物体検出最小幅3よりも小となるために、グループG1が監視対象物ではなくノイズであると判定する。
【0111】
さらに、監視対象物判定部23jは、グループG2の距離データの数5が、グループG2の代表距離3.6mに対応する物体検出最小幅2よりも大となるために、グループG2が監視対象物であると判定する。
【0112】
このように、信号処理装置23,24では、走査方向に沿って連続する走査角度で連続して算出された距離データが、その値に関係なくグループ化されるので、背後の別の物体の連続性が近傍の小さな物体によって断たれるような不都合な事態が生じることが無い。
【0113】
尚、監視対象物であるか否かを判定するためのグループの代表距離を、グループ内の複数の距離データの平均値または中央値から当該距離データの最大値迄の何れかの値に設定すれば、走査式測距装置から見て近傍側に位置する物体よりも遠方側に位置する物体を重視した判定ができるようになる。
【0114】
以下、本願発明の信号処理装置の第二の態様を説明する。
図6には、第二の態様の信号処理部23のブロック構成図が示されている。図3で示した信号処理部23と比較すると、グループ生成処理部23iによるグループの生成基準が異なり、グループ生成処理部23iに加えてグループ統合処理部23kを備えている点が異なる。
【0115】
第一の態様では、グループ生成処理部23iは、距離算出部230により算出された距離データが、監視対象領域内を示す値であり、且つ、当該距離データが測定光の走査方向に沿って連続する複数の走査角度方向に存在するときに、各距離データの値に関わらず一律にグループを生成するように構成されているが、第二の態様では、各距離データの値に基づいてグループを生成するように構成されている。
【0116】
以下、具体的に説明する。グループ生成処理部23iは、距離算出部230により算出された距離データが、監視対象領域内を示す値であり、且つ、当該距離データが測定光の走査方向に沿って連続する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成するように構成されている。
【0117】
そして、グループ生成処理部23iは、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するように構成されている。
【0118】
第一の閾値は、物体が同一物と推定可能な閾値であり、監視対象物の表面の凹凸形状等に基づいて予め設定される値である。この例では、0.2mに設定されている。
【0119】
図7に示すように、グループ生成処理部23iによって、距離データがグループG1,G2,G3,G4の四つのグループに分けられ、各グループに識別子が付与された各距離データと代表距離がグループ記憶部23eに記憶される。代表距離はグループに含まれる距離データの最大値に設定される。
【0120】
この例でも、最小検出幅記憶部23fに記憶された物体検出最小幅の値は、走査式測距装置1からの距離が3.0m未満で3に設定され、走査式測距装置1からの距離が3.0m以上で2に設定されている。
【0121】
このような場合、監視対象物判定部23jは、グループG1,G2,G3,G4の何れのグループも監視対象物が存在すると判定することができないため、当該判定結果をシステム制御部24に出力することなく、グループ統合処理部23kを起動する。
【0122】
グループ統合処理部23kは、隣接する三つのグループG2,G3,G4のうち、グループG2,G3を纏めた一つの新たなグループG(2+3)を生成し、当該新たなグループG(2+3)に含まれる距離データの最大値を新たなグループの代表距離に設定し、再度監視対象物判定部23jによる判定を起動するように構成されている。
【0123】
監視対象物判定部23jは、グループG(2+3)の距離データの数3が、グループG(2+3)の代表距離3.6mに対応する物体検出最小幅2よりも大となるために、グループG(2+3)が監視対象物であると判定する。
【0124】
第二の態様による信号処理装置23,24では、走査式測距装置1から見て近傍に位置するノイズ源としての小さな物体の背後に何らかの別の物体が存在し、当該背後の別の物体の連続性が近傍の小さな物体によって断たれる場合であっても、背後の別の物体を監視対象物であると判定できるようになる。
【0125】
走査方向に沿って三つ以上のグループが隣接する場合には、グループ統合処理部23kは、以下に示す何れかの態様を好適に採用してグループを統合することができる。
【0126】
グループ生成処理部23iで生成された複数のグループのうち、或るグループに隣接するグループが走査方向に沿って両隣に存在する場合、隣接する2グループを構成する距離データの数の和が最大となるグループを統合して一つの新たなグループを生成することで、安全サイドで適正に監視対象物の有無が判定されるようになる。
【0127】
つまり、グループ統合処理部23kは、距離データの数が最大となる二つの隣接グループを纏めて一つの新たなグループを生成することが好ましい。
【0128】
図8(a)に示す場合、グループG2とグループG3を統合すると距離データの数の和が4になり、グループG3とグループG4を統合したときの距離データの数の和3よりも大きくなるので、グループG2とグループG3を新たなグループG(2+3)に統合するのである。尚、図7に示したように、何れに隣接するグループと統合しても、距離データの数の和が等しい場合には、何れか一方のグループと統合すればよい。
【0129】
また、グループ統合処理部23kは、走査方向に沿って複数のグループが隣接する場合、代表距離が短いグループと当該代表距離が短いグループに隣接する代表距離が長いグループとを纏めて一つの新たなグループを生成することが好ましい。
【0130】
このように代表距離が短いグループを基準にグループを統合すれば、走査式測距装置1から見て近傍に位置するグループと当該グループに隣接する遠方側のグループを統合して一つの新たなグループを生成されるので、遠方側のグループに対する物体検出最小幅の判定が適正に行なわれるようになる。
【0131】
さらに、グループ統合処理部23kは、代表距離が短いグループの両側に代表距離が長いグループが隣接する場合に、両側に位置する代表距離が長いグループの距離データから得られる統合基準距離の差分が第二の閾値以下の場合に、当該代表距離が短いグループと両側の代表距離が長い方のグループを纏めて一つの新たなグループを生成することが好ましい。
【0132】
統合基準距離とは、両側に位置する代表距離が長い二つのグループが同一の物体に対する距離であることの確からしさを判定するための距離である。統合基準距離として、代表距離が短いグループに最も近い走査角度方向の距離データ、代表距離、グループ内の距離データの平均値、中央値等の何れかを採用することができる。
【0133】
第二の閾値も、同一物と推定可能な閾値であり、監視対象物の表面の凹凸形状等に基づいて予め設定される値である。第二の閾値は上述した第一の閾値よりも大きな値に設定されることが好ましい。
【0134】
両側の代表距離が長いグループの統合基準距離の差分が第二の閾値以下の場合に、これらのグループに属する距離データが同一の物体に対する距離データであると判断して、これらのグループを統合することによって、遠方側のグループに対する物体検出最小幅の判定が適正に行なわれるようになる。
【0135】
図8(b)には、統合基準距離として、代表距離が短いグループに最も近い走査角度方向の距離データを採用する場合の例が示されている。グループG2の統合基準距離が3.3m、グループG4の統合基準距離が3.2mとなり、その差分が0.1mとなる。
【0136】
この例では、第二の閾値が0.3mに設定されている。従って、グループG2,G3,G4が新たなグループG(2+3+4)に統合される。
【0137】
図8(c)は、さらに他の例が示されている。この例では、走査方向に沿ってグループG2,G3,G4,G5が隣接している。グループG2の統合基準距離が2.5m、グループG3の統合基準距離が3.3m、グループG5の統合基準距離が3.2mとなる。グループG3,G5の統合基準距離の差分が0.1m、グループG2,G3の統合基準距離の差分が0.8mとなるので、当該差分が第二の閾値0.3m以下となるグループG3,G5を含めたグループG3,G4,G5が統合されて、新たなグループG(3+4+5)が生成される。
【0138】
以下に第三の態様を説明する。
第三の態様は、例えばTOF方式などのように、距離算出部230によって、同一の走査角度方向に複数の距離が算出可能な走査式測距装置に適用される態様である。機能ブロック構成は図3がベースになる。
【0139】
グループ生成処理部23iは、距離算出部230により算出された距離データが、監視対象領域内を示す値であり、且つ、当該距離データが測定光の走査方向に沿って連続する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成するように構成されている。
【0140】
そして、グループ生成処理部23iは、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定し、監視対象物判定部23jを起動するように構成されている。
【0141】
図9に示すように、投光部3から出力された測定光の光芒Lwが微小な物体O1よりも広い場合には、当該微小な物体O1よりも遠方の物体O2にも測定光が照射されるので、遠近双方の物体O1,O2からの反射光が受光部5で検出されるようになる。
【0142】
図8(d)には、図9に対応して距離算出部230によって同一の走査角度方向7lで二つの距離が算出される場合が示されている。つまり、距離算出部230によって、走査角度方向7lで物体O1に対応する距離1.2mと、物体O2に対応する距離3.2mが算出されている。
【0143】
例えば、第一の閾値が0.2mに設定されている場合、グループ生成処理部23iはグループG1,G2,G3の三つのグループを生成する。グループG2は走査角度方向5l〜9lで隣接する距離データの差分が第一の閾値以下となる距離データのグループである。
【0144】
このようにグループを生成すれば、走査式測距装置1から見て近傍に位置するノイズ源としての小さな物体O1の背後に何らかの別の物体O2が存在する場合であっても、当該背後の別の物体O2の連続性が近傍の小さな物体によって断たれることが無いため、グループ生成処理部23iによって背後の別の物体O2が一つのグループとして生成され、監視対象物を適正に検知することができるようになる。
【0145】
尚、遠近双方の物体からの反射光の一部が重畳する場合には、反射信号の二次微分信号の二回目の立ち上がりタイミングの前後で反射信号を分離し、それぞれの反射信号の立ち上がり時期を反射光の検出タイミングとして距離を算出すればよい。
【0146】
以上説明した何れの態様であっても、グループの代表距離として、そのグループに含まれる距離データの最大値を設定することが好ましい。グループに含まれる距離データの最大値を代表距離に設定すれば、或る走査角度で、走査式測距装置の遠方側に位置する物体への測定光の照射が近傍側の微小物体で遮られる場合に、遠方に位置する物体の距離に対応した適切な物体検出最小幅の判定ができるようになる。
【0147】
また、物体検出最小幅は、代表距離が長くなるほど小さくなるように設定されていることが好ましい。同じサイズの物体であっても、走査式測距装置の近傍では連続して検出される走査角度の数が多く、または最大走査角度が大きく、走査式測距装置の遠方では連続して検出される走査角度の数が少なく、または最大走査角度が小さくなる。そこで、グループの代表距離が長くなるほど物体検出最小幅を小さくすれば、走査式測距装置を基準に遠近何れの位置に存在する物体であっても、適正に監視対象物であるか否かを判定できるようになる。
【0148】
上述した実施形態では、走査式測距装置1が、偏向光学系4によって固定軸心Pと直交する平面に沿って測定光が一次元的に走査される構成について説明したが、本発明は、測定光が二次元的に走査され、物体までの距離が三次元で測定可能な走査式測距装置にも適用可能である。
【0149】
例えば、上述した走査式測距装置1に、軸心Pを揺動させる機構を組み込むことにより、測定光を二次元的に走査可能な偏向光学系を実現することができる。
【0150】
また、測定光をXY平面上で二次元に走査する測距装置や、ランダムに2次元走査する測距装置、またCCDを2個使用した三角法による走査など複数走査角を同時に測距可能な測距装置にも本発明の技術思想を適用することができる。
【0151】
上述した第一の態様を採用して測定光を二次元的に走査する場合にも、距離算出部により算出され、且つ、監視対象領域内を示す距離データが、測定光の走査方向を問わずに、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成すればよい。
【0152】
そして、グループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定すればよい。この場合、物体検出最小幅を、一定の二次元の領域を占める距離データの個数として設定することも可能である。
【0153】
上述した実施形態は、本発明による走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置の一例であり、走査式測距装置の具体的構造、信号処理装置の具体的な回路構成、信号処理方法を実現するソフトウェアの具体的な手順等は、本発明による作用効果を奏する範囲において適宜変更設計できることはいうまでもなく、本発明の技術的範囲が上述の例に限定されるものではない。
【符号の説明】
【0154】
1:走査式測距装置
3:投光部
5:受光部
4:走査部
23:信号処理部(信号処理装置)
23a:測距演算部
23b:補正処理部
23c:補正データ記憶部
23d:走査角度/距離記憶部
23e:グループ記憶部
23f:最小検出幅設定部
23g:監視対象領域設定部
23h:領域判定処理部
23i:グループ生成処理部
23j:監視対象物判定部
23k:グループ統合処理部
230:距離算出部(信号処理装置)
231:監視対象物検出(信号処理装置)
【特許請求の範囲】
【請求項1】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出部と、
前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、
前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、
前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、
を備えている走査式測距装置の信号処理装置。
【請求項2】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出部と、
前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、
前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、
隣接する複数のグループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されなかった場合に、隣接する二つのグループを纏めた一つの新たなグループを生成し、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値を新たなグループの代表距離に設定するグループ統合処理部と、
前記グループ生成処理部または前記グループ統合処理部で生成されたグループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、
を備えている走査式測距装置の信号処理装置。
【請求項3】
前記グループ統合処理部は、距離データの数が最大となる二つの隣接グループを纏めて一つの新たなグループを生成する請求項2記載の走査式測距装置の信号処理装置。
【請求項4】
前記グループ統合処理部は、代表距離が短いグループと当該代表距離が短いグループに隣接する代表距離が長いグループとを纏めて一つの新たなグループを生成する請求項2記載の走査式測距装置の信号処理装置。
【請求項5】
前記グループ統合処理部は、代表距離が短いグループの両側に代表距離が長いグループが隣接する場合に、両側の代表距離が長いグループの距離データから得られる統合基準距離の差分が第二の閾値以下の場合に、当該代表距離が短いグループと両側の代表距離が長いグループを纏めて一つの新たなグループを生成する請求項2記載の走査式測距装置の信号処理装置。
【請求項6】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの一または複数の距離を算出する距離算出部と、
前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、
前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、
前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、
を備えている走査式測距装置の信号処理装置。
【請求項7】
前記代表距離に、前記グループに含まれる距離データの最大値が設定される請求項1から6の何れかに記載の走査式測距装置の信号処理装置。
【請求項8】
前記物体検出最小幅を示す値は、代表距離が長くなるほど小さくなるように設定されている請求項1から7の何れかに記載の走査式測距装置の信号処理装置。
【請求項9】
請求項1から8の何れかに記載の走査式測距装置の信号処理装置が組み込まれている走査式測距装置。
【請求項10】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出ステップと、
前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、
前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、
前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、
を備えている走査式測距装置の信号処理方法。
【請求項11】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出ステップと、
前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、
前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、
隣接する複数のグループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されなかった場合に、隣接する二つのグループを纏めた一つの新たなグループを生成し、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値を新たなグループの代表距離に設定するグループ統合処理ステップと、
前記グループ生成処理ステップまたは前記グループ統合処理ステップで生成されたグループに対する前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、
を備えている走査式測距装置の信号処理方法。
【請求項12】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの一または複数の距離を算出する距離算出ステップと、
前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、
前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、
前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、
を備えている走査式測距装置の信号処理方法。
【請求項1】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出部と、
前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、
前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、
前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、
を備えている走査式測距装置の信号処理装置。
【請求項2】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出部と、
前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、
前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、
隣接する複数のグループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されなかった場合に、隣接する二つのグループを纏めた一つの新たなグループを生成し、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値を新たなグループの代表距離に設定するグループ統合処理部と、
前記グループ生成処理部または前記グループ統合処理部で生成されたグループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、
を備えている走査式測距装置の信号処理装置。
【請求項3】
前記グループ統合処理部は、距離データの数が最大となる二つの隣接グループを纏めて一つの新たなグループを生成する請求項2記載の走査式測距装置の信号処理装置。
【請求項4】
前記グループ統合処理部は、代表距離が短いグループと当該代表距離が短いグループに隣接する代表距離が長いグループとを纏めて一つの新たなグループを生成する請求項2記載の走査式測距装置の信号処理装置。
【請求項5】
前記グループ統合処理部は、代表距離が短いグループの両側に代表距離が長いグループが隣接する場合に、両側の代表距離が長いグループの距離データから得られる統合基準距離の差分が第二の閾値以下の場合に、当該代表距離が短いグループと両側の代表距離が長いグループを纏めて一つの新たなグループを生成する請求項2記載の走査式測距装置の信号処理装置。
【請求項6】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理装置であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの一または複数の距離を算出する距離算出部と、
前記距離算出部により算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理部と、
前記グループ生成処理部で生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定部と、
前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力部と、
を備えている走査式測距装置の信号処理装置。
【請求項7】
前記代表距離に、前記グループに含まれる距離データの最大値が設定される請求項1から6の何れかに記載の走査式測距装置の信号処理装置。
【請求項8】
前記物体検出最小幅を示す値は、代表距離が長くなるほど小さくなるように設定されている請求項1から7の何れかに記載の走査式測距装置の信号処理装置。
【請求項9】
請求項1から8の何れかに記載の走査式測距装置の信号処理装置が組み込まれている走査式測距装置。
【請求項10】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出ステップと、
前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、
前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、
前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、
を備えている走査式測距装置の信号処理方法。
【請求項11】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの距離を算出する距離算出ステップと、
前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、
前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、
隣接する複数のグループに対する前記監視対象物判定部の判定の結果、監視対象物が存在すると判定されなかった場合に、隣接する二つのグループを纏めた一つの新たなグループを生成し、当該新たなグループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値を新たなグループの代表距離に設定するグループ統合処理ステップと、
前記グループ生成処理ステップまたは前記グループ統合処理ステップで生成されたグループに対する前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、
を備えている走査式測距装置の信号処理方法。
【請求項12】
監視対象領域に向けて測定光を走査し、所定の走査角度毎に測定光に対する物体からの反射光を検知する走査式測距装置の信号処理方法であって、
前記所定の走査角度毎に、測定光と反射光との間の所定の相関関係に基づいて当該走査式測距装置から物体までの一または複数の距離を算出する距離算出ステップと、
前記距離算出ステップで算出され、且つ、監視対象領域内を示す距離データが、隣接する複数の走査角度方向に存在するときに、隣接する走査角度方向の距離データの差分が第一の閾値以下となる複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの平均値または中央値から当該距離データの最大値迄の何れかの値をそのグループの代表距離に設定するグループ生成処理ステップと、
前記グループ生成処理ステップで生成されたグループに含まれる距離データの個数または最大走査角度で定義される物体検出幅が、前記代表距離に応じて予め設定された物体検出最小幅を示す個数以上または走査角度以上となる場合に、監視対象物が存在すると判定する監視対象物判定ステップと、
前記監視対象物判定ステップの判定の結果、監視対象物が存在すると判定されたときに、その旨を示す監視対象物検知信号を出力する信号出力ステップと、
を備えている走査式測距装置の信号処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−242189(P2012−242189A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−110952(P2011−110952)
【出願日】平成23年5月18日(2011.5.18)
【出願人】(000242600)北陽電機株式会社 (37)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月18日(2011.5.18)
【出願人】(000242600)北陽電機株式会社 (37)
【Fターム(参考)】
[ Back to top ]