
走査機構および走査型プローブ顕微鏡
【課題】XY走査時に生じる慣性力に起因する振動ノイズが低減された検出光追従型の走査機構を提供する。
【解決手段】走査機構10は、固定枠11と、XY方向に移動可能なXY可動部14を有するXYステージ13と、XY可動部14をXY方向に走査するXYアクチュエータを構成する圧電素子12A,12Bを有している。走査機構10はまた、XY可動部14に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23を有している。圧電素子21は、カンチレバー23をZ方向に走査するZアクチュエータを構成している。走査機構10はさらに、XY可動部14に保持された集光部25を有している。集光部25は、カンチレバー23の変位を検出するための光をカンチレバー23に入射させる働きをする。圧電素子21と集光部25は、X−Y平面への投影において並ぶように配置されている。
【解決手段】走査機構10は、固定枠11と、XY方向に移動可能なXY可動部14を有するXYステージ13と、XY可動部14をXY方向に走査するXYアクチュエータを構成する圧電素子12A,12Bを有している。走査機構10はまた、XY可動部14に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23を有している。圧電素子21は、カンチレバー23をZ方向に走査するZアクチュエータを構成している。走査機構10はさらに、XY可動部14に保持された集光部25を有している。集光部25は、カンチレバー23の変位を検出するための光をカンチレバー23に入射させる働きをする。圧電素子21と集光部25は、X−Y平面への投影において並ぶように配置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走査型プローブ顕微鏡に関する。
【背景技術】
【0002】
走査型プローブ顕微鏡(SPM)は、走査機構によって機械的探針を機械的に走査して試料表面の情報を得る走査型顕微鏡であって、走査型トンネリング顕微鏡(STM)、原子間力顕微鏡(AFM)、走査型磁気力顕微鏡(MFM)、走査型近接場光顕微鏡(SNOM)などの総称である。走査型プローブ顕微鏡は、機械的探針と試料とを相対的にXY方向にラスター走査し、機械的探針を介して所望の試料領域の表面情報を得て、モニターTV上にマッピング表示する。
【0003】
なかでもAFMは最も広く使用されている装置であって、機械的探針をその自由端にもつカンチレバーと、カンチレバーの変位を検出する光学式変位センサーと、機械的探針と試料を相対的に走査する走査機構を主要な機械機構として備えている。その光学式変位センサーとしては、構成が簡単でありかつ高い変位検出感度を有することから、光てこ式の光学式変位センサーが最も広く使われている。カンチレバー上に直径数μmから数十μmの光束を照射し、その反射光の反射方向がレバーの反りに応じて変化するのを二分割光ディテクタなどによりとらえて、カンチレバーの自由端にある機械的探針の動作をとらえ電気信号として出力する。この出力が一定になるように走査機構をZ方向に制御しながら、同じく走査機構をXY方向に走査することにより、コンピュータのモニター上に試料表面の凹凸の状態をマッピング・表示する。
【0004】
このようなAFMでは、液体中の生物試料を観察する場合、倒立型光学顕微鏡と組み合わせて観察することが一般的である。倒立型光学顕微鏡観察は試料の知見を得るだけでなく、試料の特定部位にカンチレバーを位置決めするときにも有効だからである。このようなAFMでは、様々な生体試料および試料基板に対応できるように、カンチレバーをXYZに走査するレバースキャンタイプの走査機構を用いることが多い。
【0005】
一方、試料をXYZに走査する試料スキャンタイプの生物用AFMにおいては、倒立型光学顕微鏡による同時観察ができない上、試料や試料基板の制約が多いという問題はあるが、液体中の生きた生物試料の動く様子を高分解能で観察できるとして注目されている。生物試料の動く様子を観察しようとしたときAFMに求められるのは観察速度である。この用途では1秒以内、望ましくは0.1秒以内に一画面を得ることが目標となる。このようなAFMの高速化を行おうとしたとき、AFM装置の電気回路周りについては現在市販されている装置でも可能なレベルに達しており、課題となるところは機械機構にある。特に、走査速度の速い走査機構や、柔らかくかつ共振周波数の高いカンチレバーや、そのカンチレバーの変位を検出できる光てこ式の光学式変位センサーが挙げられる。
【0006】
例えば、X方向100画素、Y方向100画素の画像を0.1秒で取り込むとき、走査機構に求められるX方向の走査周波数は1kHz、Y方向の走査周波数は10Hz、Z方向の走査周波数は100kHz以上に達する。
【0007】
そして生物試料の観察に適した高い周波数のカンチレバーとしては、バネ定数が1N/m以下であって、共振周波数は300kHz以上が求められる。このようなカンチレバーの寸法は現在市販されているカンチレバーに比べて10分の1程度と極めて小さいものとなり、例えば窒化シリコン製のカンチレバーで、長さ10μm、幅2μm、厚さ0.1μmとなる。そのバネ定数は0.1N/m、大気中の共振周波数は1.2MHz、液体中での共振周波数は400kHz前後となる。
【0008】
さらに光学式変位センサーとしては、極めて小さいカンチレバーの変位を検出するために収束光のスポット径が数μm以下となる集光光学系が要求される。
【0009】
以上に説明したように、生物試料のAFMによる高速観察には、倒立型光学顕微鏡観察との組み合わせが可能であること、すなわちレバースキャンタイプのAFMであることが望ましく、しかも、柔らかくて共振周波数の高い小さなカンチレバーが使用可能であるとともに、高速走査をする走査機構を備えている必要がある。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特表2010−521693号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
レバースキャンタイプのAFMの欠点は、カンチレバーだけでなく光てこ式光学式変位センサーをも一緒にXY走査しなければならないことにある。光てこ式光学式変位センサーには光源、ディテクタ、集光光学系が備わっているため小型化・軽量化が難しく、これが高速走査の妨げになるからである。この欠点を克服するために、特表2010−521693号公報に示すような、集光光学系だけをカンチレバーとともにXY走査する、検出光追従型の走査機構が提案されている。しかしながらこの走査機構には次の問題がある。
【0012】
走査対象物(以下ではXY可動部と呼ぶ)をXY走査すると、XY可動部には走査方向と反対の方向に慣性力がかかる。これは走査速度が速くなるほど大きくなる。またXY可動部が重いほど大きくなる。走査周波数が1kHzを超える場合、慣性力はXY可動部を変形させるほどになり、これがXY可動部に揺れ振動を生じさせる。XY可動部のZ軸に沿った寸法が長いほど、その影響は大きくなる。
【0013】
前述の従来例の走査機構は、XY可動部がZアクチュエータと対物系を保持し、それらを同時にXY走査する検出光追従型の走査機構である。この走査機構において、例えばXY可動部をX−Y平面に平行なある方向へ走査すると、XY可動部には逆方向に慣性力が働く。しかしながらこの走査機構においては、Zアクチュエータと対物系がZ方向に直列に配置されているため、XY可動部がZ軸に沿って長い構造になっている。その結果、XY可動部に、X−Y平面に平行な軸を回転中心とする揺れ振動が生じやすい。さらにZアクチュエータに保持されたカンチレバーがXY可動部の端に配置されているため、XY可動部の揺れ振動が増幅され、カンチレバー位置での揺れ量がより大きくなるという問題がある。すなわち、このような走査機構は、走査時に生じる慣性力の影響を受けやすく、振動ノイズが生じやすい機構と言える。このような走査機構はサブナノメートルのオーダの精度が要求される走査型プローブ顕微鏡の高速走査には望ましくない。
【0014】
本発明は、この様な実状を考慮して成されたものであり、その目的は、XY走査時に生じる慣性力に起因する振動ノイズが低減された検出光追従型の走査機構を提供することにある。
【課題を解決するための手段】
【0015】
本発明の走査機構は、カンチレバーと、X−Y平面に平行なXY方向に移動可能なXY可動部と、前記XY可動部をXY方向に走査するXYアクチュエータと、前記XY可動部に保持された、X−Y平面に垂直なZ方向に前記カンチレバーを走査するZアクチュエータと、前記XY可動部に保持された、前記カンチレバーの変位を検出するための光を前記カンチレバーに入射させる集光部とを備えている。前記Zアクチュエータと前記集光部は、X−Y平面への投影において並ぶように配置されている。
【発明の効果】
【0016】
本発明によれば、XY走査時に生じる慣性力に起因する振動ノイズが低減された検出光追従型の走査機構が提供される。
【図面の簡単な説明】
【0017】
【図1】第一実施形態の走査機構の上面図である。
【図2】図1中のA−A線に沿った走査機構の断面図である。
【図3】第二実施形態の走査機構の上面図である。
【図4】図3中のB−B線に沿った走査機構の断面図である。
【図5】第二実施形態の変形例である走査機構の上面図である。
【図6】図5中のC−C線に沿った走査機構の断面図である。
【図7】第二実施形態の変形例である走査機構の上面図である。
【図8】図7中のD−D線に沿った走査機構の断面図である。
【図9】第二実施形態の変形例である走査機構の上面図である。
【図10】図9中のE−E線に沿った走査機構の断面図である。
【図11】走査の衝撃によりXY可動部の土台部の変形する様子を示している。
【図12】第三実施形態の走査機構の上面図である。
【図13】図12中のF−F線に沿った走査機構の断面図である。
【図14】第三実施形態の変形例である走査機構の上面図である。
【図15】図14中のG−G線に沿った走査機構の断面図である。
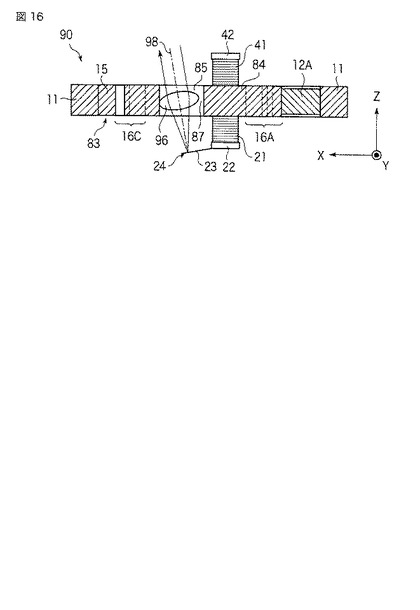
【図16】第三実施形態の変形例の変形例である走査機構の断面図である。
【図17】第四実施形態による走査型プローブ顕微鏡を示している。
【図18】第四実施形態の変形例である走査型プローブ顕微鏡を示している。
【図19】第五実施形態による走査型プローブ顕微鏡を示している。
【発明を実施するための形態】
【0018】
以下、図面を参照しながら本発明の実施形態について説明する。
【0019】
<第一実施形態>
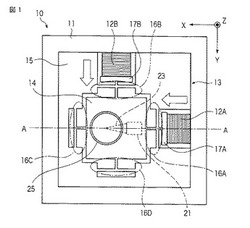
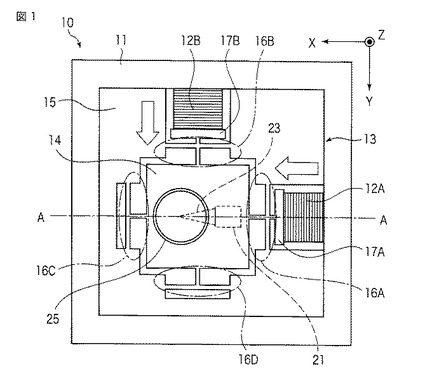
本実施形態は、走査機構に向けられている。以下、図1と図2を参照しながら本実施形態について説明する。図1は、本実施形態の走査機構の上面図であり、図2は、図1中のA−A線に沿った走査機構の断面図である。
【0020】
図1と図2に示されるように、本実施形態の走査機構10は、固定枠11と、固定枠11内に配置されたXYステージ13と、XYステージ13と固定枠11の間に配置されたX軸に沿って延びている圧電素子12Aと、XYステージ13と固定枠11の間に配置されたY軸に沿って延びている圧電素子12Bを有している。
【0021】
XYステージ13は、互いに直交するX軸とY軸に沿って(つまりX軸とY軸を含むX−Y平面に平行なXY方向に)移動可能なXY可動部14と、XY可動部14のX軸に沿った両側に設けられた弾性部16A,16Cと、XY可動部14のY軸に沿った両側に設けられた弾性部16B,16Dと、弾性部16A〜16Dを支持している支持部15とを有している。
【0022】
XYステージ13の支持部15は、圧電素子12Aと弾性部16A,16CのY軸に沿った両側に位置している。別の言い方をすれば、圧電素子12Bと弾性部16B,16DのX軸に沿った両側に位置している。支持部15は固定枠11に固定されている。支持部15の固定は、これに限定されないが、例えば、ねじ締結や接着によってなされている。
【0023】
弾性部16Aと16Bは、向きが異なる点を除けば、まったく同一形状をしている。これらは共に十字形状を有している。また弾性部16Cと16Dは、向きが異なる点を除けば、まったく同一形状をしている。これらは共にT字形状を有している。圧電素子12Aの側に位置する弾性部16Aは、圧電素子12Aによって押される押圧部17Aを有している。また圧電素子12Bの側に位置する弾性部16Bは、圧電素子12Bによって押される押圧部17Bを有している。
【0024】
弾性部16A,16Cは、ZX面に広がりX軸に沿って細長い矩形の板状部分と、YZ面に広がりY軸に沿って細長い矩形の板状部分とを有している。X軸に沿って細長い矩形の板状部分は、X軸に沿った一方の端部がXY可動部14と接続し、X軸に沿った一方の端部がY軸に沿って細長い矩形の板状部分の中央部と接続している。Y軸に沿って細長い矩形の板状部分は、Y軸に沿った両端部が支持部15と接続している。
【0025】
また、弾性部16B,16Dは、YZ面に広がりY軸に沿って細長い矩形の板状部分と、ZX面に広がりX軸に沿って細長い矩形の板状部分とを有している。Y軸に沿って細長い矩形の板状部分は、Y軸に沿った一方の端部がXY可動部14と接続し、Y軸に沿った一方の端部がX軸に沿って細長い矩形の板状部分の中央部と接続している。X軸に沿って細長い矩形の板状部分は、X軸に沿った両端部が支持部15と接続している。これらの板状部分の厚さ、すなわちZ軸に沿った寸法は、これに限定されないが、例えば、XY可動部14の厚さと同じである。
【0026】
このような形状を有することにより、弾性部16A,16Cは、Y軸に沿っては弾性変形しやすいが、X軸に沿っては変形しにくい。弾性部16B,16Dは、X軸に沿っては弾性変形しやすいが、Y軸に沿っては変形しにくい。従って、XY可動部14は、弾性部16A,16Cにより、X軸に沿った方向に関して高剛性に支持され、弾性部16B,16Dにより、Y軸に沿った方向に関して高剛性に支持されている。
【0027】
XYステージ13は一体的に形成されている。つまり、XY可動部14と支持部15と弾性部16A〜16Dと押圧部17A,17Bは一体的に形成されている。XYステージ13は、例えばアルミニウム製の金属のブロックを選択的に切り欠いて作製される。
【0028】
固定枠11の材質は、好ましくは、XYステージ13の材質よりも高い弾性率を有している。例えば、固定枠11はステンレス鋼で、XYステージ13はアルミニウムから成る。
【0029】
圧電素子12Aは、弾性部16Aの押圧部17Aと固定枠11の間に所定の予圧がかかるように配置されている。また、圧電素子12Bは、弾性部16Bの押圧部17Bと固定枠11の間に所定の予圧がかかるように配置されている。
【0030】
圧電素子12Aは、XY可動部14の重心を通るX軸に平行な直線が圧電素子12Aの中心を通るよう配置されている。また、圧電素子12Bは、XY可動部14の重心を通るY軸に平行な直線が圧電素子12Bの中心を通るよう配置されている。
【0031】
圧電素子12Aは、弾性部16Aを介してXY可動部14をX軸に沿って移動させるためのXアクチュエータであり、電圧印加に応じてX軸に沿って伸縮し得る。圧電素子12Bは、弾性部16Bを介してXY可動部14をY軸に沿って移動させるためのYアクチュエータであり、電圧印加に応じてY軸に沿って伸縮し得る。
【0032】
圧電素子12Aと圧電素子12Bは、例えば、実質的に同一の二つの積層型圧電素子で構成されている。圧電素子12Aと圧電素子12Bは、X−Y平面に平行な方向にXY可動部14を走査するXYアクチュエータを構成している。
【0033】
走査機構10はまた、XY可動部14に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23を有している。圧電素子21は、一端がXY可動部14に固定され、−Z方向に延出している。圧電素子21の自由端には、カンチレバー23を保持するホルダ22が保持されている。圧電素子21は、例えば、積層型圧電素子で構成されている。圧電素子21は、電圧印加に応じてZ軸に沿って伸縮し得る。圧電素子21は、X−Y平面に垂直なZ軸方向にカンチレバー23を走査するZアクチュエータを構成している。カンチレバー23は、その自由端に機械的探針24を有している。カンチレバー23は、例えばX軸に沿って延びている。カンチレバー23は、ホルダ22に交換可能に取り付けられてよい。
【0034】
走査機構10はさらに、XY可動部14に保持された集光部25を有している。集光部25は、図示しないカンチレバーの光学式変位センサー、例えば光てこセンサーから出射されるカンチレバー23の変位を検出するための光をカンチレバー23に入射させる働きをする。集光部25は、これに限定されないが、例えば、二つの集光レンズ26A,26Bを有している。集光レンズ26A,26Bは、XY可動部14に固定された、XY可動部14を貫通して延びている筒体27によって保持されている。
【0035】
圧電素子21と集光部25は、X−Y平面への投影において並ぶように配置されている。言い換えれば、圧電素子21と集光部25は、投影されたX−Y平面上において、互いに重なることなく、一方が他方の外側に位置している。圧電素子21と集光部25は、これに限定されないが、例えば、カンチレバー23が延びている方向すなわちX軸に沿って並んでいる。
【0036】
このように構成された走査機構10においては、X走査の際、圧電素子12AがX軸に沿って伸縮する。圧電素子12Aが伸びる時は、圧電素子12Aが弾性部16Aを弾性変形させながらXY可動部14を押す。これによりXY可動部14はX軸に沿って一方向に移動される。これに伴って弾性部16CはXY可動部14に押されることにより弾性変形される。さらに弾性部16B,16DもXY可動部14の移動方向に引っ張られるために弾性変形される。圧電素子12Aが縮む時は、弾性変形されている弾性部16A〜16Dのすべての復元力に従ってXY可動部14がX軸に沿って逆方向に移動される。このようにしてXY可動部14は、X方向に高い直進性をもって走査される。
【0037】
同様に、Y走査の際は、圧電素子12BがY軸に沿って伸縮する。圧電素子12Bが伸びる時は、圧電素子12Bが弾性部16Bを弾性変形させながらXY可動部14を押す。これによりXY可動部14はY軸に沿って一方向に移動される。これに伴って弾性部16DはXY可動部14に押されることにより弾性変形される。さらに弾性部16A,16CもXY可動部14の移動方向に引っ張られるために弾性変形される。圧電素子12Bが縮む時は、弾性変形されている弾性部16A〜16Dのすべての復元力に従ってXY可動部14がY軸に沿って逆方向に移動される。このようにしてXY可動部14は、Y方向に高い直進性をもって走査される。
【0038】
圧電素子12Aと圧電素子12Bのそれぞれの中心軸がXY可動部14の重心を通っているため、XY可動部14が高速で移動された場合でも、慣性力による回転運動が発生し難い。このため、XY可動部14は、高速かつ高い直進性をもってXY方向に走査され得る。
【0039】
XY可動部14がXY方向に走査される際、圧電素子21とともにカンチレバー23もXY方向に走査される。従って、カンチレバー23も、高速かつ高い直進性をもって走査される。
【0040】
XY可動部14がXY方向に走査される際、集光部25もXY方向に走査される。従って、集光部25も、高速かつ高い直進性をもってXY方向に走査される。
【0041】
集光部25には、図示しない光てこセンサーから出射されたコリメートレーザ光29が集光部25の光軸28に平行に入射する。集光部25は、入射したレーザ光29をカンチレバー23の自由端に集光して照射する。カンチレバー23の自由端で反射されたレーザ光29は、集光部25を通って図示しない光ディテクタに入射する。
【0042】
XY可動部14がXY方向に走査される際、集光部25とともに集光部25の焦点位置も同じ距離だけXY方向に走査されるので、集光部25によって集光されたレーザ光29の集光スポットも集光部25と同じ距離だけXY方向に走査される。従って、集光部25が作るレーザ光29の集光スポットが、高速かつ高い直進性をもってXY方向に走査される。
【0043】
以上より、走査機構10においては、カンチレバー23と集光部25が作るレーザ光29の集光スポットが高速かつ高い直進性をもってXY方向に同じ距離だけ走査される。
【0044】
さらに走査機構10では、集光部25と圧電素子21が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。このため、集光部25と圧電素子21を含むXY可動部14のZ軸に沿った長さが短く抑えられている。その結果、XY可動部14を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部14の揺れ振動」が低減される。またカンチレバー23がXY可動部14の重心を通るX−Y平面に近づくため、カンチレバー23の揺れ振動が増加することも回避される。
【0045】
従って、走査機構10においては、カンチレバー23と集光部25が作るレーザ光29の集光スポットが高速かつ高い直進性をもってXY方向に同じ距離だけ走査されるので、XY走査時に生じる慣性力に起因する振動ノイズが低減された検出光追従型の走査機構が提供される。その結果、高速かつ高い直進性をもった高精度な検出光追従型の走査機構が提供される。
【0046】
<第二実施形態>
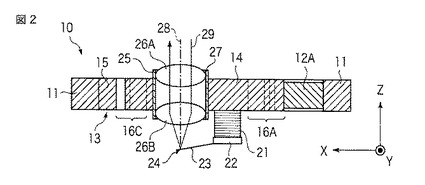
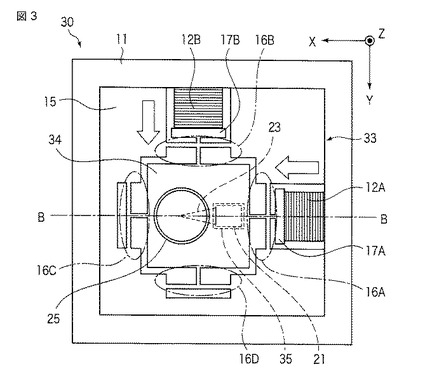
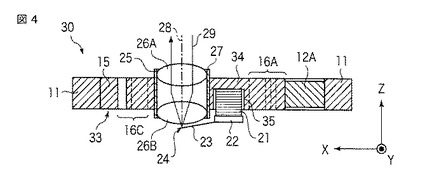
本実施形態は、走査機構に向けられている。以下、図3と図4を参照しながら本実施形態について説明する。図3は、本実施形態の走査機構30の上面図であり、図4は、図3中のB−B線に沿った走査機構30の断面図である。図3と図4において、図1と図2に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0047】
図3と図4に示すように、XYステージ33はXY可動部34を有し、XY可動部34は、その下面にZ軸に沿って延びた角穴35を有している。角穴35は、電圧印加に応じてZ軸に沿って伸縮する圧電素子21が固定されている。その結果、圧電素子21の重心は、XY可動部34の厚み(Z軸に沿った寸法)内に収まっている。すなわち圧電素子21の重心がXY可動部34の重心を通るX−Y平面に近づけられている。これはカンチレバー23の位置をXY可動部34の重心を通るX−Y平面に近づけることにもなる。圧電素子21の自由端には、カンチレバー23を保持するためのホルダ22が取り付けられている。
【0048】
また集光部25は、XY可動部34を貫通しXY可動部34に保持されている。集光部25は、その重心がXY可動部34のZ方向の厚み内に収まるように、望ましくは、XY可動部34の重心を通るX−Y平面にほぼ一致するよう保持されている。
【0049】
このように構成された走査機構30においては、圧電素子21と集光部25が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。さらに、圧電素子21と集光部25の重心がいずれもXY可動部34のZ方向の厚み内に収まっている。その結果、XY可動部34を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部34の揺れ振動」が低減される。またカンチレバー23がXY可動部34の重心を通るX−Y平面に近づくため、カンチレバー23の揺れ振動が増加することも回避される。
【0050】
[変形例1]
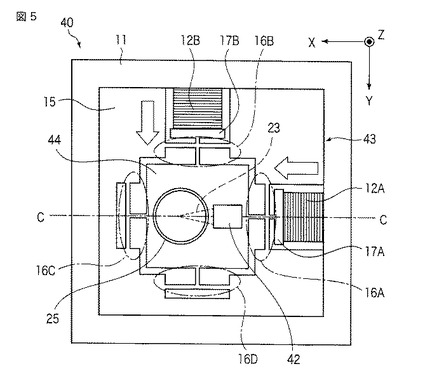
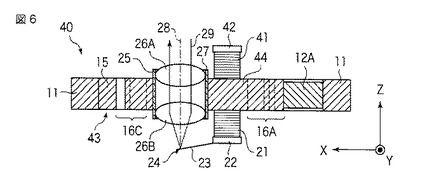
さらにこの走査機構では次の変形が可能である。第二実施形態の変形例である走査機構40を図5と図6に示す。図5は、本実施形態の変形例である走査機構40の上面図であり、図6は、図5中のC−C線に沿った走査機構40の断面図である。図5と図6において、図1と図2に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0051】
図5と図6に示すように、走査機構40はXYステージ43を有し、XYステージ43はXY可動部44を有している。走査機構40はまた、XY可動部44に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部44に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42を有している。
【0052】
圧電素子21は、一端がXY可動部44に固定され、−Z方向に延出している。また、圧電素子41は、一端がXY可動部44に固定され、+Z方向に延出している。つまり、圧電素子21と圧電素子41はそれぞれXY可動部44からZ軸に沿って反対側に延びている。
【0053】
圧電素子21と圧電素子41は、例えば実質的に同一の積層型圧電素子で構成されており、電圧印加に応じてZ軸に沿って伸縮し得る。圧電素子21と圧電素子41は、X−Y平面に垂直なZ軸方向にカンチレバー23を走査するZアクチュエータを構成している。
【0054】
XY可動部44の下面に設けられた圧電素子21の自由端には、カンチレバー23を保持するためのホルダ22が取り付けられている。つまり、カンチレバー23は圧電素子21の自由端に保持されている。XY可動部44の上面に設けられた圧電素子41の自由端には、ホルダ22と同一の部材である疑似ホルダ42が取り付けられている。疑似ホルダ42は、ホルダ22と同等の質量をもつ部材であれば置き換え可能である。
【0055】
カンチレバー23をZ方向に走査する際、図示しないZ圧電駆動部によりZ駆動信号を二つの圧電素子21,41に供給し、二つの圧電素子21,41が同じ量だけ逆向きに伸縮される。これにより、圧電素子21の伸縮がXY可動部44に与えるZ軸に沿った力が、圧電素子41の伸縮によって打ち消される。これにより、圧電素子21の伸縮により生じるXY可動部44のZ方向の振動がほぼ0に抑えられる。
【0056】
このように構成された走査機構40においては、二つの圧電素子21,41と集光部25が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。集光部25は、その重心がXY可動部44のZ方向の厚み内に収まるように、望ましくは、XY可動部44の重心を通るX−Y平面にほぼ一致するように保持されている。二つの圧電素子21,41はほぼ同形状・同質量であるため、二つの圧電素子21,41で構成されるZアクチュエータは、その重心がXY可動部44のZ方向の厚み内に収まるように、望ましくは、XY可動部44の重心を通るX−Y平面にほぼ一致するように保持されている。その結果、XY可動部44を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部44の揺れ振動」が低減される。さらに、二つの圧電素子21,41で構成されるZアクチュエータは、XY可動部44の重心を通るX−Y平面に対してほぼ対称形となる。これは「慣性力に起因するXY可動部44の揺れ振動」を相殺するカウンターバランスとして働く。その結果、「慣性力に起因するXY可動部44の揺れ振動」がより低減される。加えて、二つの圧電素子21,41で構成されるZアクチュエータにより、カンチレバー23をZ方向に走査する際に生じる振動ノイズもほぼ0に抑えられる。
【0057】
[変形例2]
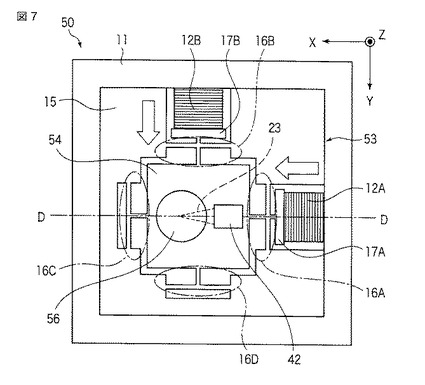
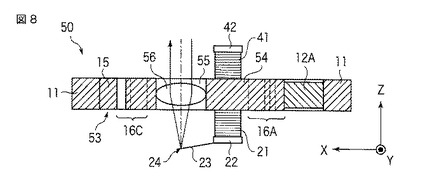
さらにこの走査機構では次の変形が可能である。第二実施形態の変形例である走査機構50を図7と図8に示す。図7は、本実施形態の変形例である走査機構50の上面図であり、図8は、図7中のD−D線に沿った走査機構50の断面図である。図7と図8において、図5と図6に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0058】
図7と図8に示すように、走査機構50はXYステージ53を有し、XYステージ53はXY可動部54を有している。走査機構50はまた、XY可動部54に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部54に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42を有している。
【0059】
走査機構50はさらに、XY可動部54に保持された単レンズ56を有している。単レンズ56は、XY可動部54に形成された貫通穴55内に配置され、XY可動部54の厚み内に収まっている。単レンズ56は、望ましくは、その重心がXY可動部54の重心を通るX−Y平面にほぼ一致するように保持されている。単レンズ56は、図1に示した集光部25と同等の集光性を備えている。つまり、単レンズ56は、カンチレバー23の変位を検出するための光をカンチレバー23に入射させる集光部を構成している。例えば、単レンズ56は、長さ10μm、幅2μmの小さなカンチレバーにも集光し得るように、そのNAが0.4以上の光学特性を備えている。焦点スポット径は1.22×波長/NAで求められるため、例えば光てこセンサーの検出光に波長650nmの赤色レーザを用いた場合、NAが0.4のときに焦点スポット径は約2μmになるからである。また単レンズ56は、その直径が10mm以下であることが望ましい。XY走査の高速化を図るためには、XY可動部54自体を小型・軽量にすることが重要だからである。
【0060】
このように構成された走査機構50においては、二つの圧電素子21,41と単レンズ56が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。単レンズ56は、それ自体がXY可動部54内に収まるように、望ましくは、その重心がXY可動部54の重心を通るX−Y平面にほぼ一致するように保持されている。また、二つの圧電素子21,41はほぼ同形状・同質量であるため、二つの圧電素子21,41で構成されるZアクチュエータは、その重心がXY可動部54の重心を通るX−Y平面にほぼ一致するように保持されている。その結果、XY可動部54を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部54の揺れ振動」が低減される。さらに、二つの圧電素子21,41で構成されるZアクチュエータは、XY可動部54の重心を通るX−Y平面に対してほぼ対称形となる。これは「慣性力に起因するXY可動部54の揺れ振動」を相殺するカウンターバランスとして働く。その結果、「慣性力に起因するXY可動部54の揺れ振動」がより低減される。加えて、二つの圧電素子21,41で構成されるZアクチュエータにより、カンチレバー23をZ方向に走査する際に生じる振動ノイズもほぼ0に抑えられる。
【0061】
さらに集光部が小型・軽量の単レンズであるため、集光部にかかる慣性力が低減される。その結果、「慣性力に起因するXY可動部54の揺れ振動」がより低減される。またXY可動部54自体を小型・軽量にすることが可能になり、その結果、走査機構の共振周波数を上げることができる。これは高速走査に効果がある。
【0062】
[変形例3]
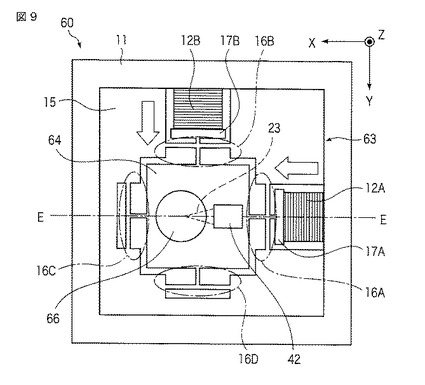
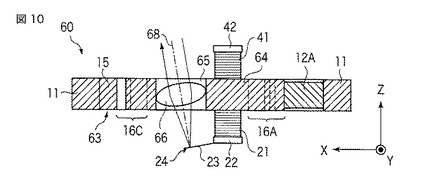
さらにこの走査機構では次の変形が可能である。第二実施形態の変形例である走査機構60を図9と図10に示す。図9は、本実施形態の変形例である走査機構60の上面図であり、図10は、図9中のE−E線に沿った走査機構60の断面図である。図9と図10において、図7と図8に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0063】
図9と図10に示すように、走査機構60はXYステージ63を有し、XYステージ63はXY可動部64を有している。走査機構60はまた、XY可動部64に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部64に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42を有している。
【0064】
XY可動部64の下面に設けられた圧電素子21の自由端には、カンチレバー23を保持するためのホルダ22が取り付けられている。ホルダ22は、カンチレバー23をX−Y平面に対して5度ないし20度に傾きをもって保持している。これは、カンチレバー23のレバー面と、図示しないX−Y平面に平行に配置された試料との干渉を避けるためであり、ほとんどすべてのAFMにおいて実施されている。XY可動部64の上面に設けられた圧電素子41の自由端には、ホルダ22と同一の部材である疑似ホルダ42が取り付けられている。疑似ホルダ42は、ホルダ22と同等の質量をもつ部材であれば置き換え可能である。
【0065】
走査機構60はさらに、XY可動部64に保持された単レンズ66を有している。単レンズ66は、収束光をカンチレバー23のレバー面に対して垂直に入射させるように、その光軸68がX−Y平面に垂直な軸に対して5度ないし20度になるよう傾けて保持されている。また単レンズ66は、XY可動部64に形成された貫通穴65内に配置され、XY可動部64の厚み内に収まっている。単レンズ66は、望ましくは、その重心がXY可動部64の重心を通るX−Y平面にほぼ一致するように保持されている。さらに単レンズ66は、長さ10μm、幅2μmの小さなカンチレバーにも集光できるように、そのNAが0.4以上の光学特性を備えている。
【0066】
このように構成された走査機構60においては、二つの圧電素子21,41と単レンズ66が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。単レンズ66は、その重心がXY可動部64の重心を通るX−Y平面にほぼ一致するように保持されている。また、二つの圧電素子21,41はほぼ同形状・同質量であるため、二つの圧電素子21,41で構成されるZアクチュエータは、その重心がXY可動部64の重心を通るX−Y平面にほぼ一致するように保持されている。その結果、XY可動部64を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部64の揺れ振動」が低減される。さらに、二つの圧電素子21,41で構成されるZアクチュエータは、XY可動部64の重心を通るX−Y平面に対してほぼ対称形となる。これは「慣性力に起因するXY可動部64の揺れ振動」を相殺するカウンターバランスとして働く。その結果、「慣性力に起因するXY可動部64の揺れ振動」がより低減される。加えて、二つの圧電素子21,41で構成されるZアクチュエータにより、カンチレバー23をZ方向に走査する際に生じる振動ノイズもほぼ0に抑えられる。さらに、単レンズ66の光軸68がX−Y平面に垂直な軸に対して5度ないし20度になるよう傾けて保持されているので、カンチレバー23に対して垂直に収束光を入射させることができる。また単レンズ66は、そのNAが0.4以上の光学特性を備えている。その結果、カンチレバー23に形成する集光スポット径を直径2μm程度にまで小さくすることができる。これはカンチレバー23の変位検出の精度向上に効果がある。
【0067】
<第三実施形態>
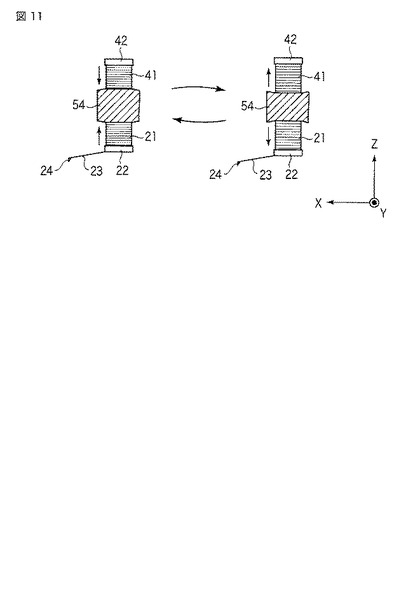
本実施形態は、走査機構に向けられている。以下、図11〜図13を参照しながら本実施形態について説明する。
【0068】
第二実施形態に示した走査機構40,50,60は、Z軸に沿って反対側に延びている二つの圧電素子21,41を有し、カンチレバー23をZ方向に走査する際に生じる振動ノイズをほぼ0に抑えている。しかしながらZ方向への走査は最大100kHz以上にも及ぶため、走査の衝撃により、二つの圧電素子21,41が設けられたXY可動部の土台部が変形するという問題がある。走査機構50を例にしたXY可動部54の土台部が変形する様子を図11に示す。この変形は、最大100kHz以上の振動ノイズとなって集光部(走査機構50では単レンズ56)に伝わる。集光部は、その外周部だけでXY可動部に保持されているため振動ノイズに対して強固であるとは言えず、その結果、集光部がXY可動部に対して振動する。これはAFM観察の高精度化を妨げる。
【0069】
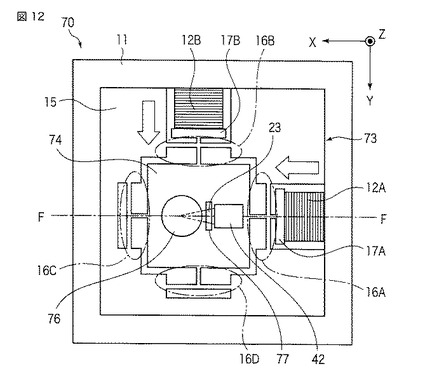
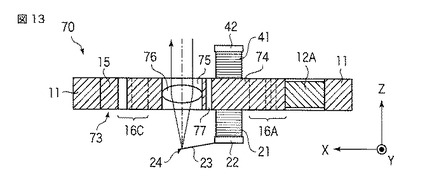
図12は、上記問題を解決する本実施形態である走査機構70の上面図であり、図13は、図12中のF−F線に沿った走査機構70の断面図である。図12と図13において、図7と図8に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0070】
図12と図13に示すように、走査機構70はXYステージ73を有し、XYステージ73はXY可動部74を有している。走査機構70はまた、XY可動部74に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部74に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42と、XY可動部74に保持された単レンズ76を有している。単レンズ76は、XY可動部74に形成された貫通穴75内に配置され、XY可動部74の厚み内に収まっている。望ましくは、単レンズ76は、その重心がXY可動部74の重心を通るX−Y平面にほぼ一致するように保持されている。
【0071】
XY可動部74に設けられた単レンズ76と二つの圧電素子21,41から成るZアクチュエータが、X−Y平面への投影においてX軸に沿って並ぶように配置されている。単レンズ76と二つの圧電素子21,41から成るZアクチュエータとの間には、それらを機械的に分離するように、XY可動部74を貫通する開口部77が設けられている。
【0072】
このように構成された走査機構70においては、二つの圧電素子21,41と単レンズ76との間に、それらを機械的に分離する開口部77が設けられているため、Z方向への走査の際に生じる振動ノイズの単レンズ76への伝達が低減される。
【0073】
[変形例]
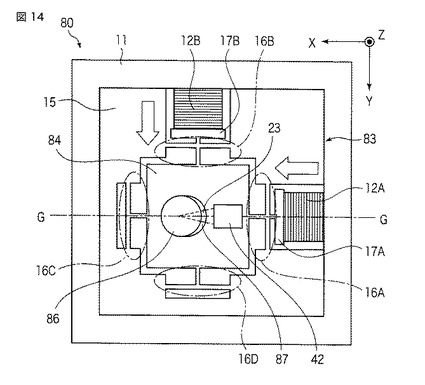
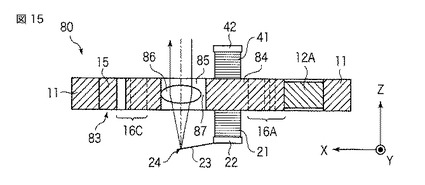
さらにこの走査機構では次の変形が可能である。第三実施形態の変形例である走査機構80を図14と図15に示す。図14は、本実施形態の変形例である走査機構80の上面図であり、図15は、図14中のG−G線に沿った走査機構80の断面図である。図14と図15において、図12と図13に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0074】
図14と図15に示すように、走査機構80はXYステージ83を有し、XYステージ83はXY可動部84を有している。走査機構80はまた、XY可動部84に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部84に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42と、XY可動部84に保持された単レンズ86を有している。
【0075】
単レンズ86は、XY可動部84に形成された貫通穴85内に配置されている。単レンズ86を保持するためのXY可動部84に設けられた貫通穴85は、単レンズ86の外形(円)を僅かに広げた楕円形あるいは卵形をしており、単レンズ86は、貫通穴85内において、二つの圧電素子21,41から離れた位置で保持されている。すなわち、単レンズ86の外周部の一部分、例えば半分ないし3/4が貫通穴85に接合され、残りの外周部は貫通穴85に接触しないように保持されている。その結果、二つの圧電素子21,41に最も近い単レンズ86の部分とXY可動部84の間にすき間すなわち開口部87が形成されている。開口部87は、単レンズ86とXY可動部84を機械的に分離している。さらに単レンズ86は、XY可動部84の厚み内に収まっており、望ましくは、その重心がXY可動部84の重心を通るX−Y平面にほぼ一致するように保持されている。
【0076】
このように構成された走査機構80においては、二つの圧電素子21,41と単レンズ86との間には、それらを機械的に分離するように、開口部87が形成されている。さらに単レンズ86は、二つの圧電素子21,41から離れた位置で保持されている。このため、単レンズ86は、二つの圧電素子21,41を保持しているXY可動部84の土台部とは完全に機械的に分離されている。その結果、Z方向への走査の際に生じる振動ノイズの単レンズ86への伝達がより低減される。
【0077】
第三実施形態の別の変形例を図16に示す。図16に示す走査機構90は、単レンズ96の配置を除いては、走査機構80と同じである。単レンズ96は、その光軸98がX−Y平面に垂直な軸に対して5度ないし20度になるよう傾けて保持されてもよい。このような構成においても、単レンズ96への振動ノイズの伝達の低減について同様の効果を得ることができる。
【0078】
<第四実施形態>
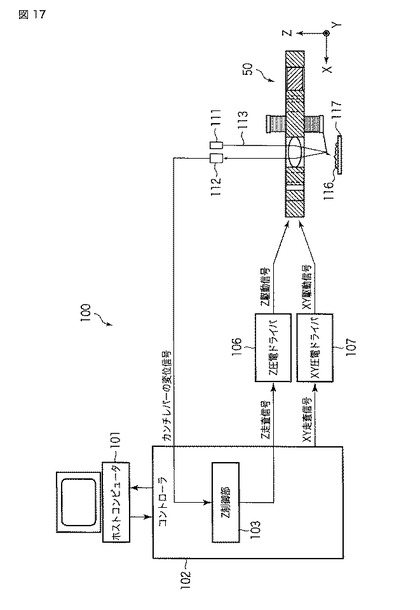
本実施形態は、第二実施形態の走査機構を備えた走査型プローブ顕微鏡に向けられている。以下、図17を参照しながら本実施形態について説明する。図17は、本実施形態による走査型プローブ顕微鏡100を示している。
【0079】
図17に示すように、本実施形態の走査型プローブ顕微鏡100は、カンチレバー23を保持した走査機構50と、ホストコンピュータ101と、Z制御部103を備えたコントローラ102と、レーザ光源111と、分割ディテクタ112と、Z圧電ドライバ106と、XY圧電ドライバ107を備えている。カンチレバー23に対向する位置には、試料台117に載置された試料116が配置されている。
【0080】
走査機構50は、カンチレバー23をX軸とY軸とZ軸に沿って走査するためのものであり、その詳細な構成は第二実施形態(図7と図8)で説明した通りである。この走査機構50は図示しない鏡枠によって保持されている。
【0081】
カンチレバー23は、試料116に対向して配置されるプローブを柔軟なレバー部の自由端に備えており、カンチレバー23は試料116との相互作用に応じてZ軸に沿って変位する。
【0082】
レーザ光源111と分割ディテクタ112は、カンチレバー23の自由端のZ軸に沿った変位を光学的に検出するための光学式変位センサーを構成しており、図示しない鏡枠に保持されている。
【0083】
Z圧電ドライバ106は、走査機構50に搭載された二つの圧電素子21,41を駆動するためのものである。
【0084】
XY圧電ドライバ107は、走査機構50に搭載された圧電素子12A,12Bを駆動するためのものである。
【0085】
コントローラ102は、Z圧電ドライバ106とXY圧電ドライバ107を制御するためのものある。
【0086】
ホストコンピュータ101は、カンチレバー23の変位情報と走査機構50の走査情報とに基づいて試料116の物理情報を取得する処理部を構成している。
【0087】
本実施形態の走査型プローブ顕微鏡は以下のように動作する。
【0088】
レーザ光源111と分割ディテクタ112で構成される光学式変位センサーは、例えば走査型プローブ顕微鏡によく用いられる光てこセンサーであり、レーザ光源111から照射されたコリメートレーザ光113は、走査機構50に設けられた単レンズ56を介してカンチレバー23上に直径数μm程度の集光スポットを形成し、その反射光を分割ディテクタ112で受けることで、カンチレバー23の自由端にある機械的探針24のZ変位をとらえる。分割ディテクタ112は、カンチレバー23のZ変位を反映した変位信号をコントローラ102に出力する。
【0089】
コントローラ102は、XY方向にラスター走査するためのXY走査信号を生成し、XY走査信号をXY圧電ドライバ107とホストコンピュータ101に供給する。コントローラ102はZ制御部103を含んでおり、Z制御部103は、分割ディテクタ112で得られるカンチレバー23の変位情報を一定に維持するようにZ圧電ドライバ106を制御するためのZ走査信号を生成し、そのZ走査信号をZ圧電ドライバ106とホストコンピュータ101に供給する。
【0090】
Z圧電ドライバ106は、コントローラ102から供給されるZ走査信号を所定のゲインで増幅してZ駆動信号を生成し、Z駆動信号を走査機構50に搭載された二つの圧電素子21,41に供給する。
【0091】
XY圧電ドライバ107は、コントローラ102から供給されるXY走査信号を所定のゲインで増幅してXY駆動信号を生成し、XY駆動信号を走査機構50に搭載された圧電素子12A,12Bに供給する。具体的には、コントローラ102から供給されるX走査信号を増幅して生成したX駆動信号を圧電素子12Aに供給し、コントローラ102から供給されるY走査信号を増幅して生成したY駆動信号を圧電素子12Bに供給する。
【0092】
ホストコンピュータ101は、コントローラ102から供給されるXY走査信号とZ走査信号とに基づいて試料116の表面形状の三次元画像を構築し、これをモニター上に表示する。
【0093】
この走査型プローブ顕微鏡100では、走査機構50を用いることにより、高精度にXY方向に高速走査される。従ってこの走査型プローブ顕微鏡100によれば、観察分解能が向上し、観察時間が短縮される。
【0094】
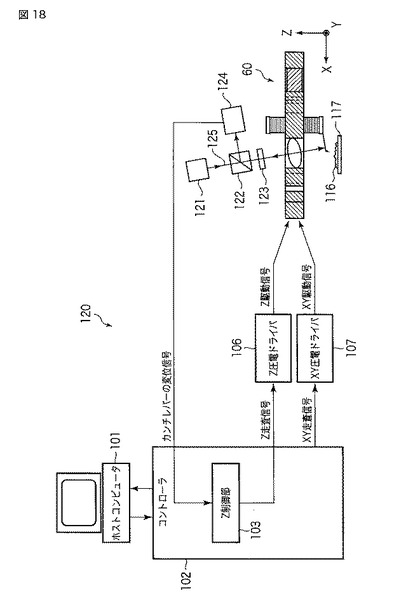
[変形例]
さらにこの走査型プローブ顕微鏡では次の変形が可能である。第四実施形態の変形例である走査型プローブ顕微鏡120を図18に示す。図18において、図17に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0095】
図18に示した走査型プローブ顕微鏡120は、図17に示した走査機構50を走査機構60に置き換えた構成になっている。さらに、レーザ光源121とビームスプリッタ122と波長板123と分割ディテクタ124を備えている。
【0096】
レーザ光源121とビームスプリッタ122と波長板123と分割ディテクタ124は、カンチレバー23の自由端のZ軸に沿った変位を光学的に検出するための光学式変位センサーを構成しており、それぞれ図示しない鏡枠に保持されている。これらで構成される光学式変位センサーは、例えば走査型プローブ顕微鏡によく用いられる光てこセンサーであり、レーザ光源121から照射されたコリメートレーザ光125は、ビームスプリッタ122と波長板123を介して走査機構60に設けられた単レンズ66に照射され、カンチレバー23上に直径2μm程度の集光スポットを形成する。その反射光は、波長板123を通ることでビームスプリッタ122によって偏向されて分割ディテクタ124に入射する。分割ディテクタ124は、カンチレバー23のZ変位を反映した変位信号をコントローラ102に出力する。
【0097】
この走査型プローブ顕微鏡120では、走査機構60を用いることにより、高精度にXY方向に高速走査される。従ってこの走査型プローブ顕微鏡120によれば、観察分解能が向上し、観察時間が短縮される。またこの走査型プローブ顕微鏡120によれば、走査機構60によりカンチレバーへ照射する集光スポット径を直径2μm程度にまで小さくすることができる。これはカンチレバー23の変位検出の精度向上に効果がある。従ってこの走査型プローブ顕微鏡120によれば、より高精度に試料を観察することができる。
【0098】
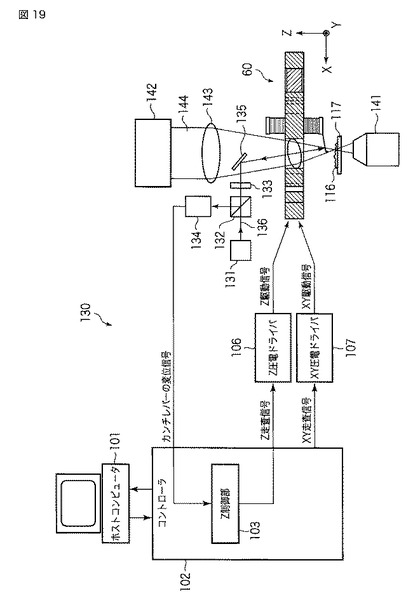
<第五実施形態>
本実施形態は、第二実施形態の走査機構を備えた走査型プローブ顕微鏡に向けられている。図19を参照しながら本実施形態について説明する。図19は、本実施形態による走査型プローブ顕微鏡130を示している。図19において、図18に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0099】
図19に示した走査型プローブ顕微鏡130は、コリメートレーザ光136を出射するレーザ光源131と、ビームスプリッタ132と、波長板133と、ハーフミラー135と、分割ディテクタ134、対物レンズ141と、照明光144を出射する照明光源142と、照明光144を集光するコンデンサレンズ143を備えている。
【0100】
レーザ光源131とビームスプリッタ132と波長板133と分割ディテクタ134とハーフミラー135は、カンチレバー23の自由端のZ軸に沿った変位を光学的に検出するための光学式変位センサーを構成しており、それぞれ図示しない鏡枠に保持されている。これらで構成される変位センサーは、例えば走査型プローブ顕微鏡によく用いられる光てこ方式の変位センサーであり、レーザ光源131から出射されたコリメートレーザ光136は、ビームスプリッタ132と波長板133とハーフミラー135を介して走査機構60に設けられた単レンズ66に照射され、カンチレバー23上に直径2μm程度の集光スポットを形成する。そしてその反射光は、単レンズ66とハーフミラー135と波長板123を通り、ビームスプリッタ132で分割ディテクタ134側に反射される。分割ディテクタ134は、カンチレバー23のZ変位を反映した変位信号をコントローラ102に出力する。
【0101】
また照明光源142から出射された照明光144は、コンデンサレンズ143とハーフミラー135と単レンズ66を通って試料116に照射され、対物レンズ141に入射される。これにより倒立型光学顕微鏡によって試料116が透過観察される。
【0102】
この走査型プローブ顕微鏡130では、走査機構60を用いることにより、高精度にXY方向に高速走査される。従ってこの走査型プローブ顕微鏡130によれば、観察分解能が向上し、観察時間が短縮される。
【0103】
またこの走査型プローブ顕微鏡130によれば、走査機構60によりカンチレバーへ照射する集光スポット径を直径2μm程度にまで小さくすることができる。これはカンチレバー23の変位検出の精度向上に効果がある。従ってこの走査型プローブ顕微鏡130によれば、より高精度に試料を観察することができる。
【0104】
さらにこの走査型プローブ顕微鏡130では、倒立型光学顕微鏡による試料116の透過観察が可能になっている。これは試料116の観察位置決めなど、操作性の向上につながる。
【0105】
これまで、図面を参照しながら本発明の実施形態を述べたが、本発明は、これらの実施形態に限定されるものではなく、その要旨を逸脱しない範囲において様々な変形や変更が施されてもよい。ここにいう様々な変形や変更は、上述した実施形態を適当に組み合わせた実施も含む。
【符号の説明】
【0106】
10…走査機構、11…固定枠、12A,12B…圧電素子、13…XYステージ、14…XY可動部、15…支持部、16A,16B,16C,16D…弾性部、17A,17B…押圧部、21…圧電素子、22…ホルダ、23…カンチレバー、24…機械的探針、25…集光部、26A,26B…集光レンズ、27…筒体、28…光軸、29…レーザ光、30…走査機構、33…XYステージ、34…XY可動部、35…角穴、40…走査機構、41…圧電素子、42…疑似ホルダ、43…XYステージ、44…XY可動部、50…走査機構、53…XYステージ、54…XY可動部、55…貫通穴、56…単レンズ、60…走査機構、63…XYステージ、64…XY可動部、65…貫通穴、66…単レンズ、68…光軸、70…走査機構、73…XYステージ、74…XY可動部、75…貫通穴、76…単レンズ、77…開口部、80…走査機構、83…XYステージ、84…XY可動部、85…貫通穴、86…単レンズ、87…開口部、90…走査機構、96…単レンズ、89…光軸、100…走査型プローブ顕微鏡、101…ホストコンピュータ、102…コントローラ、103…Z制御部、106…Z圧電ドライバ、107…XY圧電ドライバ、111…レーザ光源、112…分割ディテクタ、113…レーザ光、116…試料、117…試料台、120…走査型プローブ顕微鏡、121…レーザ光源、122…ビームスプリッタ、123…波長板、124…分割ディテクタ、125…レーザ光、130…走査型プローブ顕微鏡、131…レーザ光源、132…ビームスプリッタ、133…波長板、134…分割ディテクタ、135…ハーフミラー、136…レーザ光、141…対物レンズ、142…照明光源、143…コンデンサレンズ、144…照明光。
【技術分野】
【0001】
本発明は、走査型プローブ顕微鏡に関する。
【背景技術】
【0002】
走査型プローブ顕微鏡(SPM)は、走査機構によって機械的探針を機械的に走査して試料表面の情報を得る走査型顕微鏡であって、走査型トンネリング顕微鏡(STM)、原子間力顕微鏡(AFM)、走査型磁気力顕微鏡(MFM)、走査型近接場光顕微鏡(SNOM)などの総称である。走査型プローブ顕微鏡は、機械的探針と試料とを相対的にXY方向にラスター走査し、機械的探針を介して所望の試料領域の表面情報を得て、モニターTV上にマッピング表示する。
【0003】
なかでもAFMは最も広く使用されている装置であって、機械的探針をその自由端にもつカンチレバーと、カンチレバーの変位を検出する光学式変位センサーと、機械的探針と試料を相対的に走査する走査機構を主要な機械機構として備えている。その光学式変位センサーとしては、構成が簡単でありかつ高い変位検出感度を有することから、光てこ式の光学式変位センサーが最も広く使われている。カンチレバー上に直径数μmから数十μmの光束を照射し、その反射光の反射方向がレバーの反りに応じて変化するのを二分割光ディテクタなどによりとらえて、カンチレバーの自由端にある機械的探針の動作をとらえ電気信号として出力する。この出力が一定になるように走査機構をZ方向に制御しながら、同じく走査機構をXY方向に走査することにより、コンピュータのモニター上に試料表面の凹凸の状態をマッピング・表示する。
【0004】
このようなAFMでは、液体中の生物試料を観察する場合、倒立型光学顕微鏡と組み合わせて観察することが一般的である。倒立型光学顕微鏡観察は試料の知見を得るだけでなく、試料の特定部位にカンチレバーを位置決めするときにも有効だからである。このようなAFMでは、様々な生体試料および試料基板に対応できるように、カンチレバーをXYZに走査するレバースキャンタイプの走査機構を用いることが多い。
【0005】
一方、試料をXYZに走査する試料スキャンタイプの生物用AFMにおいては、倒立型光学顕微鏡による同時観察ができない上、試料や試料基板の制約が多いという問題はあるが、液体中の生きた生物試料の動く様子を高分解能で観察できるとして注目されている。生物試料の動く様子を観察しようとしたときAFMに求められるのは観察速度である。この用途では1秒以内、望ましくは0.1秒以内に一画面を得ることが目標となる。このようなAFMの高速化を行おうとしたとき、AFM装置の電気回路周りについては現在市販されている装置でも可能なレベルに達しており、課題となるところは機械機構にある。特に、走査速度の速い走査機構や、柔らかくかつ共振周波数の高いカンチレバーや、そのカンチレバーの変位を検出できる光てこ式の光学式変位センサーが挙げられる。
【0006】
例えば、X方向100画素、Y方向100画素の画像を0.1秒で取り込むとき、走査機構に求められるX方向の走査周波数は1kHz、Y方向の走査周波数は10Hz、Z方向の走査周波数は100kHz以上に達する。
【0007】
そして生物試料の観察に適した高い周波数のカンチレバーとしては、バネ定数が1N/m以下であって、共振周波数は300kHz以上が求められる。このようなカンチレバーの寸法は現在市販されているカンチレバーに比べて10分の1程度と極めて小さいものとなり、例えば窒化シリコン製のカンチレバーで、長さ10μm、幅2μm、厚さ0.1μmとなる。そのバネ定数は0.1N/m、大気中の共振周波数は1.2MHz、液体中での共振周波数は400kHz前後となる。
【0008】
さらに光学式変位センサーとしては、極めて小さいカンチレバーの変位を検出するために収束光のスポット径が数μm以下となる集光光学系が要求される。
【0009】
以上に説明したように、生物試料のAFMによる高速観察には、倒立型光学顕微鏡観察との組み合わせが可能であること、すなわちレバースキャンタイプのAFMであることが望ましく、しかも、柔らかくて共振周波数の高い小さなカンチレバーが使用可能であるとともに、高速走査をする走査機構を備えている必要がある。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特表2010−521693号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
レバースキャンタイプのAFMの欠点は、カンチレバーだけでなく光てこ式光学式変位センサーをも一緒にXY走査しなければならないことにある。光てこ式光学式変位センサーには光源、ディテクタ、集光光学系が備わっているため小型化・軽量化が難しく、これが高速走査の妨げになるからである。この欠点を克服するために、特表2010−521693号公報に示すような、集光光学系だけをカンチレバーとともにXY走査する、検出光追従型の走査機構が提案されている。しかしながらこの走査機構には次の問題がある。
【0012】
走査対象物(以下ではXY可動部と呼ぶ)をXY走査すると、XY可動部には走査方向と反対の方向に慣性力がかかる。これは走査速度が速くなるほど大きくなる。またXY可動部が重いほど大きくなる。走査周波数が1kHzを超える場合、慣性力はXY可動部を変形させるほどになり、これがXY可動部に揺れ振動を生じさせる。XY可動部のZ軸に沿った寸法が長いほど、その影響は大きくなる。
【0013】
前述の従来例の走査機構は、XY可動部がZアクチュエータと対物系を保持し、それらを同時にXY走査する検出光追従型の走査機構である。この走査機構において、例えばXY可動部をX−Y平面に平行なある方向へ走査すると、XY可動部には逆方向に慣性力が働く。しかしながらこの走査機構においては、Zアクチュエータと対物系がZ方向に直列に配置されているため、XY可動部がZ軸に沿って長い構造になっている。その結果、XY可動部に、X−Y平面に平行な軸を回転中心とする揺れ振動が生じやすい。さらにZアクチュエータに保持されたカンチレバーがXY可動部の端に配置されているため、XY可動部の揺れ振動が増幅され、カンチレバー位置での揺れ量がより大きくなるという問題がある。すなわち、このような走査機構は、走査時に生じる慣性力の影響を受けやすく、振動ノイズが生じやすい機構と言える。このような走査機構はサブナノメートルのオーダの精度が要求される走査型プローブ顕微鏡の高速走査には望ましくない。
【0014】
本発明は、この様な実状を考慮して成されたものであり、その目的は、XY走査時に生じる慣性力に起因する振動ノイズが低減された検出光追従型の走査機構を提供することにある。
【課題を解決するための手段】
【0015】
本発明の走査機構は、カンチレバーと、X−Y平面に平行なXY方向に移動可能なXY可動部と、前記XY可動部をXY方向に走査するXYアクチュエータと、前記XY可動部に保持された、X−Y平面に垂直なZ方向に前記カンチレバーを走査するZアクチュエータと、前記XY可動部に保持された、前記カンチレバーの変位を検出するための光を前記カンチレバーに入射させる集光部とを備えている。前記Zアクチュエータと前記集光部は、X−Y平面への投影において並ぶように配置されている。
【発明の効果】
【0016】
本発明によれば、XY走査時に生じる慣性力に起因する振動ノイズが低減された検出光追従型の走査機構が提供される。
【図面の簡単な説明】
【0017】
【図1】第一実施形態の走査機構の上面図である。
【図2】図1中のA−A線に沿った走査機構の断面図である。
【図3】第二実施形態の走査機構の上面図である。
【図4】図3中のB−B線に沿った走査機構の断面図である。
【図5】第二実施形態の変形例である走査機構の上面図である。
【図6】図5中のC−C線に沿った走査機構の断面図である。
【図7】第二実施形態の変形例である走査機構の上面図である。
【図8】図7中のD−D線に沿った走査機構の断面図である。
【図9】第二実施形態の変形例である走査機構の上面図である。
【図10】図9中のE−E線に沿った走査機構の断面図である。
【図11】走査の衝撃によりXY可動部の土台部の変形する様子を示している。
【図12】第三実施形態の走査機構の上面図である。
【図13】図12中のF−F線に沿った走査機構の断面図である。
【図14】第三実施形態の変形例である走査機構の上面図である。
【図15】図14中のG−G線に沿った走査機構の断面図である。
【図16】第三実施形態の変形例の変形例である走査機構の断面図である。
【図17】第四実施形態による走査型プローブ顕微鏡を示している。
【図18】第四実施形態の変形例である走査型プローブ顕微鏡を示している。
【図19】第五実施形態による走査型プローブ顕微鏡を示している。
【発明を実施するための形態】
【0018】
以下、図面を参照しながら本発明の実施形態について説明する。
【0019】
<第一実施形態>
本実施形態は、走査機構に向けられている。以下、図1と図2を参照しながら本実施形態について説明する。図1は、本実施形態の走査機構の上面図であり、図2は、図1中のA−A線に沿った走査機構の断面図である。
【0020】
図1と図2に示されるように、本実施形態の走査機構10は、固定枠11と、固定枠11内に配置されたXYステージ13と、XYステージ13と固定枠11の間に配置されたX軸に沿って延びている圧電素子12Aと、XYステージ13と固定枠11の間に配置されたY軸に沿って延びている圧電素子12Bを有している。
【0021】
XYステージ13は、互いに直交するX軸とY軸に沿って(つまりX軸とY軸を含むX−Y平面に平行なXY方向に)移動可能なXY可動部14と、XY可動部14のX軸に沿った両側に設けられた弾性部16A,16Cと、XY可動部14のY軸に沿った両側に設けられた弾性部16B,16Dと、弾性部16A〜16Dを支持している支持部15とを有している。
【0022】
XYステージ13の支持部15は、圧電素子12Aと弾性部16A,16CのY軸に沿った両側に位置している。別の言い方をすれば、圧電素子12Bと弾性部16B,16DのX軸に沿った両側に位置している。支持部15は固定枠11に固定されている。支持部15の固定は、これに限定されないが、例えば、ねじ締結や接着によってなされている。
【0023】
弾性部16Aと16Bは、向きが異なる点を除けば、まったく同一形状をしている。これらは共に十字形状を有している。また弾性部16Cと16Dは、向きが異なる点を除けば、まったく同一形状をしている。これらは共にT字形状を有している。圧電素子12Aの側に位置する弾性部16Aは、圧電素子12Aによって押される押圧部17Aを有している。また圧電素子12Bの側に位置する弾性部16Bは、圧電素子12Bによって押される押圧部17Bを有している。
【0024】
弾性部16A,16Cは、ZX面に広がりX軸に沿って細長い矩形の板状部分と、YZ面に広がりY軸に沿って細長い矩形の板状部分とを有している。X軸に沿って細長い矩形の板状部分は、X軸に沿った一方の端部がXY可動部14と接続し、X軸に沿った一方の端部がY軸に沿って細長い矩形の板状部分の中央部と接続している。Y軸に沿って細長い矩形の板状部分は、Y軸に沿った両端部が支持部15と接続している。
【0025】
また、弾性部16B,16Dは、YZ面に広がりY軸に沿って細長い矩形の板状部分と、ZX面に広がりX軸に沿って細長い矩形の板状部分とを有している。Y軸に沿って細長い矩形の板状部分は、Y軸に沿った一方の端部がXY可動部14と接続し、Y軸に沿った一方の端部がX軸に沿って細長い矩形の板状部分の中央部と接続している。X軸に沿って細長い矩形の板状部分は、X軸に沿った両端部が支持部15と接続している。これらの板状部分の厚さ、すなわちZ軸に沿った寸法は、これに限定されないが、例えば、XY可動部14の厚さと同じである。
【0026】
このような形状を有することにより、弾性部16A,16Cは、Y軸に沿っては弾性変形しやすいが、X軸に沿っては変形しにくい。弾性部16B,16Dは、X軸に沿っては弾性変形しやすいが、Y軸に沿っては変形しにくい。従って、XY可動部14は、弾性部16A,16Cにより、X軸に沿った方向に関して高剛性に支持され、弾性部16B,16Dにより、Y軸に沿った方向に関して高剛性に支持されている。
【0027】
XYステージ13は一体的に形成されている。つまり、XY可動部14と支持部15と弾性部16A〜16Dと押圧部17A,17Bは一体的に形成されている。XYステージ13は、例えばアルミニウム製の金属のブロックを選択的に切り欠いて作製される。
【0028】
固定枠11の材質は、好ましくは、XYステージ13の材質よりも高い弾性率を有している。例えば、固定枠11はステンレス鋼で、XYステージ13はアルミニウムから成る。
【0029】
圧電素子12Aは、弾性部16Aの押圧部17Aと固定枠11の間に所定の予圧がかかるように配置されている。また、圧電素子12Bは、弾性部16Bの押圧部17Bと固定枠11の間に所定の予圧がかかるように配置されている。
【0030】
圧電素子12Aは、XY可動部14の重心を通るX軸に平行な直線が圧電素子12Aの中心を通るよう配置されている。また、圧電素子12Bは、XY可動部14の重心を通るY軸に平行な直線が圧電素子12Bの中心を通るよう配置されている。
【0031】
圧電素子12Aは、弾性部16Aを介してXY可動部14をX軸に沿って移動させるためのXアクチュエータであり、電圧印加に応じてX軸に沿って伸縮し得る。圧電素子12Bは、弾性部16Bを介してXY可動部14をY軸に沿って移動させるためのYアクチュエータであり、電圧印加に応じてY軸に沿って伸縮し得る。
【0032】
圧電素子12Aと圧電素子12Bは、例えば、実質的に同一の二つの積層型圧電素子で構成されている。圧電素子12Aと圧電素子12Bは、X−Y平面に平行な方向にXY可動部14を走査するXYアクチュエータを構成している。
【0033】
走査機構10はまた、XY可動部14に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23を有している。圧電素子21は、一端がXY可動部14に固定され、−Z方向に延出している。圧電素子21の自由端には、カンチレバー23を保持するホルダ22が保持されている。圧電素子21は、例えば、積層型圧電素子で構成されている。圧電素子21は、電圧印加に応じてZ軸に沿って伸縮し得る。圧電素子21は、X−Y平面に垂直なZ軸方向にカンチレバー23を走査するZアクチュエータを構成している。カンチレバー23は、その自由端に機械的探針24を有している。カンチレバー23は、例えばX軸に沿って延びている。カンチレバー23は、ホルダ22に交換可能に取り付けられてよい。
【0034】
走査機構10はさらに、XY可動部14に保持された集光部25を有している。集光部25は、図示しないカンチレバーの光学式変位センサー、例えば光てこセンサーから出射されるカンチレバー23の変位を検出するための光をカンチレバー23に入射させる働きをする。集光部25は、これに限定されないが、例えば、二つの集光レンズ26A,26Bを有している。集光レンズ26A,26Bは、XY可動部14に固定された、XY可動部14を貫通して延びている筒体27によって保持されている。
【0035】
圧電素子21と集光部25は、X−Y平面への投影において並ぶように配置されている。言い換えれば、圧電素子21と集光部25は、投影されたX−Y平面上において、互いに重なることなく、一方が他方の外側に位置している。圧電素子21と集光部25は、これに限定されないが、例えば、カンチレバー23が延びている方向すなわちX軸に沿って並んでいる。
【0036】
このように構成された走査機構10においては、X走査の際、圧電素子12AがX軸に沿って伸縮する。圧電素子12Aが伸びる時は、圧電素子12Aが弾性部16Aを弾性変形させながらXY可動部14を押す。これによりXY可動部14はX軸に沿って一方向に移動される。これに伴って弾性部16CはXY可動部14に押されることにより弾性変形される。さらに弾性部16B,16DもXY可動部14の移動方向に引っ張られるために弾性変形される。圧電素子12Aが縮む時は、弾性変形されている弾性部16A〜16Dのすべての復元力に従ってXY可動部14がX軸に沿って逆方向に移動される。このようにしてXY可動部14は、X方向に高い直進性をもって走査される。
【0037】
同様に、Y走査の際は、圧電素子12BがY軸に沿って伸縮する。圧電素子12Bが伸びる時は、圧電素子12Bが弾性部16Bを弾性変形させながらXY可動部14を押す。これによりXY可動部14はY軸に沿って一方向に移動される。これに伴って弾性部16DはXY可動部14に押されることにより弾性変形される。さらに弾性部16A,16CもXY可動部14の移動方向に引っ張られるために弾性変形される。圧電素子12Bが縮む時は、弾性変形されている弾性部16A〜16Dのすべての復元力に従ってXY可動部14がY軸に沿って逆方向に移動される。このようにしてXY可動部14は、Y方向に高い直進性をもって走査される。
【0038】
圧電素子12Aと圧電素子12Bのそれぞれの中心軸がXY可動部14の重心を通っているため、XY可動部14が高速で移動された場合でも、慣性力による回転運動が発生し難い。このため、XY可動部14は、高速かつ高い直進性をもってXY方向に走査され得る。
【0039】
XY可動部14がXY方向に走査される際、圧電素子21とともにカンチレバー23もXY方向に走査される。従って、カンチレバー23も、高速かつ高い直進性をもって走査される。
【0040】
XY可動部14がXY方向に走査される際、集光部25もXY方向に走査される。従って、集光部25も、高速かつ高い直進性をもってXY方向に走査される。
【0041】
集光部25には、図示しない光てこセンサーから出射されたコリメートレーザ光29が集光部25の光軸28に平行に入射する。集光部25は、入射したレーザ光29をカンチレバー23の自由端に集光して照射する。カンチレバー23の自由端で反射されたレーザ光29は、集光部25を通って図示しない光ディテクタに入射する。
【0042】
XY可動部14がXY方向に走査される際、集光部25とともに集光部25の焦点位置も同じ距離だけXY方向に走査されるので、集光部25によって集光されたレーザ光29の集光スポットも集光部25と同じ距離だけXY方向に走査される。従って、集光部25が作るレーザ光29の集光スポットが、高速かつ高い直進性をもってXY方向に走査される。
【0043】
以上より、走査機構10においては、カンチレバー23と集光部25が作るレーザ光29の集光スポットが高速かつ高い直進性をもってXY方向に同じ距離だけ走査される。
【0044】
さらに走査機構10では、集光部25と圧電素子21が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。このため、集光部25と圧電素子21を含むXY可動部14のZ軸に沿った長さが短く抑えられている。その結果、XY可動部14を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部14の揺れ振動」が低減される。またカンチレバー23がXY可動部14の重心を通るX−Y平面に近づくため、カンチレバー23の揺れ振動が増加することも回避される。
【0045】
従って、走査機構10においては、カンチレバー23と集光部25が作るレーザ光29の集光スポットが高速かつ高い直進性をもってXY方向に同じ距離だけ走査されるので、XY走査時に生じる慣性力に起因する振動ノイズが低減された検出光追従型の走査機構が提供される。その結果、高速かつ高い直進性をもった高精度な検出光追従型の走査機構が提供される。
【0046】
<第二実施形態>
本実施形態は、走査機構に向けられている。以下、図3と図4を参照しながら本実施形態について説明する。図3は、本実施形態の走査機構30の上面図であり、図4は、図3中のB−B線に沿った走査機構30の断面図である。図3と図4において、図1と図2に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0047】
図3と図4に示すように、XYステージ33はXY可動部34を有し、XY可動部34は、その下面にZ軸に沿って延びた角穴35を有している。角穴35は、電圧印加に応じてZ軸に沿って伸縮する圧電素子21が固定されている。その結果、圧電素子21の重心は、XY可動部34の厚み(Z軸に沿った寸法)内に収まっている。すなわち圧電素子21の重心がXY可動部34の重心を通るX−Y平面に近づけられている。これはカンチレバー23の位置をXY可動部34の重心を通るX−Y平面に近づけることにもなる。圧電素子21の自由端には、カンチレバー23を保持するためのホルダ22が取り付けられている。
【0048】
また集光部25は、XY可動部34を貫通しXY可動部34に保持されている。集光部25は、その重心がXY可動部34のZ方向の厚み内に収まるように、望ましくは、XY可動部34の重心を通るX−Y平面にほぼ一致するよう保持されている。
【0049】
このように構成された走査機構30においては、圧電素子21と集光部25が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。さらに、圧電素子21と集光部25の重心がいずれもXY可動部34のZ方向の厚み内に収まっている。その結果、XY可動部34を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部34の揺れ振動」が低減される。またカンチレバー23がXY可動部34の重心を通るX−Y平面に近づくため、カンチレバー23の揺れ振動が増加することも回避される。
【0050】
[変形例1]
さらにこの走査機構では次の変形が可能である。第二実施形態の変形例である走査機構40を図5と図6に示す。図5は、本実施形態の変形例である走査機構40の上面図であり、図6は、図5中のC−C線に沿った走査機構40の断面図である。図5と図6において、図1と図2に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0051】
図5と図6に示すように、走査機構40はXYステージ43を有し、XYステージ43はXY可動部44を有している。走査機構40はまた、XY可動部44に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部44に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42を有している。
【0052】
圧電素子21は、一端がXY可動部44に固定され、−Z方向に延出している。また、圧電素子41は、一端がXY可動部44に固定され、+Z方向に延出している。つまり、圧電素子21と圧電素子41はそれぞれXY可動部44からZ軸に沿って反対側に延びている。
【0053】
圧電素子21と圧電素子41は、例えば実質的に同一の積層型圧電素子で構成されており、電圧印加に応じてZ軸に沿って伸縮し得る。圧電素子21と圧電素子41は、X−Y平面に垂直なZ軸方向にカンチレバー23を走査するZアクチュエータを構成している。
【0054】
XY可動部44の下面に設けられた圧電素子21の自由端には、カンチレバー23を保持するためのホルダ22が取り付けられている。つまり、カンチレバー23は圧電素子21の自由端に保持されている。XY可動部44の上面に設けられた圧電素子41の自由端には、ホルダ22と同一の部材である疑似ホルダ42が取り付けられている。疑似ホルダ42は、ホルダ22と同等の質量をもつ部材であれば置き換え可能である。
【0055】
カンチレバー23をZ方向に走査する際、図示しないZ圧電駆動部によりZ駆動信号を二つの圧電素子21,41に供給し、二つの圧電素子21,41が同じ量だけ逆向きに伸縮される。これにより、圧電素子21の伸縮がXY可動部44に与えるZ軸に沿った力が、圧電素子41の伸縮によって打ち消される。これにより、圧電素子21の伸縮により生じるXY可動部44のZ方向の振動がほぼ0に抑えられる。
【0056】
このように構成された走査機構40においては、二つの圧電素子21,41と集光部25が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。集光部25は、その重心がXY可動部44のZ方向の厚み内に収まるように、望ましくは、XY可動部44の重心を通るX−Y平面にほぼ一致するように保持されている。二つの圧電素子21,41はほぼ同形状・同質量であるため、二つの圧電素子21,41で構成されるZアクチュエータは、その重心がXY可動部44のZ方向の厚み内に収まるように、望ましくは、XY可動部44の重心を通るX−Y平面にほぼ一致するように保持されている。その結果、XY可動部44を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部44の揺れ振動」が低減される。さらに、二つの圧電素子21,41で構成されるZアクチュエータは、XY可動部44の重心を通るX−Y平面に対してほぼ対称形となる。これは「慣性力に起因するXY可動部44の揺れ振動」を相殺するカウンターバランスとして働く。その結果、「慣性力に起因するXY可動部44の揺れ振動」がより低減される。加えて、二つの圧電素子21,41で構成されるZアクチュエータにより、カンチレバー23をZ方向に走査する際に生じる振動ノイズもほぼ0に抑えられる。
【0057】
[変形例2]
さらにこの走査機構では次の変形が可能である。第二実施形態の変形例である走査機構50を図7と図8に示す。図7は、本実施形態の変形例である走査機構50の上面図であり、図8は、図7中のD−D線に沿った走査機構50の断面図である。図7と図8において、図5と図6に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0058】
図7と図8に示すように、走査機構50はXYステージ53を有し、XYステージ53はXY可動部54を有している。走査機構50はまた、XY可動部54に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部54に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42を有している。
【0059】
走査機構50はさらに、XY可動部54に保持された単レンズ56を有している。単レンズ56は、XY可動部54に形成された貫通穴55内に配置され、XY可動部54の厚み内に収まっている。単レンズ56は、望ましくは、その重心がXY可動部54の重心を通るX−Y平面にほぼ一致するように保持されている。単レンズ56は、図1に示した集光部25と同等の集光性を備えている。つまり、単レンズ56は、カンチレバー23の変位を検出するための光をカンチレバー23に入射させる集光部を構成している。例えば、単レンズ56は、長さ10μm、幅2μmの小さなカンチレバーにも集光し得るように、そのNAが0.4以上の光学特性を備えている。焦点スポット径は1.22×波長/NAで求められるため、例えば光てこセンサーの検出光に波長650nmの赤色レーザを用いた場合、NAが0.4のときに焦点スポット径は約2μmになるからである。また単レンズ56は、その直径が10mm以下であることが望ましい。XY走査の高速化を図るためには、XY可動部54自体を小型・軽量にすることが重要だからである。
【0060】
このように構成された走査機構50においては、二つの圧電素子21,41と単レンズ56が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。単レンズ56は、それ自体がXY可動部54内に収まるように、望ましくは、その重心がXY可動部54の重心を通るX−Y平面にほぼ一致するように保持されている。また、二つの圧電素子21,41はほぼ同形状・同質量であるため、二つの圧電素子21,41で構成されるZアクチュエータは、その重心がXY可動部54の重心を通るX−Y平面にほぼ一致するように保持されている。その結果、XY可動部54を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部54の揺れ振動」が低減される。さらに、二つの圧電素子21,41で構成されるZアクチュエータは、XY可動部54の重心を通るX−Y平面に対してほぼ対称形となる。これは「慣性力に起因するXY可動部54の揺れ振動」を相殺するカウンターバランスとして働く。その結果、「慣性力に起因するXY可動部54の揺れ振動」がより低減される。加えて、二つの圧電素子21,41で構成されるZアクチュエータにより、カンチレバー23をZ方向に走査する際に生じる振動ノイズもほぼ0に抑えられる。
【0061】
さらに集光部が小型・軽量の単レンズであるため、集光部にかかる慣性力が低減される。その結果、「慣性力に起因するXY可動部54の揺れ振動」がより低減される。またXY可動部54自体を小型・軽量にすることが可能になり、その結果、走査機構の共振周波数を上げることができる。これは高速走査に効果がある。
【0062】
[変形例3]
さらにこの走査機構では次の変形が可能である。第二実施形態の変形例である走査機構60を図9と図10に示す。図9は、本実施形態の変形例である走査機構60の上面図であり、図10は、図9中のE−E線に沿った走査機構60の断面図である。図9と図10において、図7と図8に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0063】
図9と図10に示すように、走査機構60はXYステージ63を有し、XYステージ63はXY可動部64を有している。走査機構60はまた、XY可動部64に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部64に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42を有している。
【0064】
XY可動部64の下面に設けられた圧電素子21の自由端には、カンチレバー23を保持するためのホルダ22が取り付けられている。ホルダ22は、カンチレバー23をX−Y平面に対して5度ないし20度に傾きをもって保持している。これは、カンチレバー23のレバー面と、図示しないX−Y平面に平行に配置された試料との干渉を避けるためであり、ほとんどすべてのAFMにおいて実施されている。XY可動部64の上面に設けられた圧電素子41の自由端には、ホルダ22と同一の部材である疑似ホルダ42が取り付けられている。疑似ホルダ42は、ホルダ22と同等の質量をもつ部材であれば置き換え可能である。
【0065】
走査機構60はさらに、XY可動部64に保持された単レンズ66を有している。単レンズ66は、収束光をカンチレバー23のレバー面に対して垂直に入射させるように、その光軸68がX−Y平面に垂直な軸に対して5度ないし20度になるよう傾けて保持されている。また単レンズ66は、XY可動部64に形成された貫通穴65内に配置され、XY可動部64の厚み内に収まっている。単レンズ66は、望ましくは、その重心がXY可動部64の重心を通るX−Y平面にほぼ一致するように保持されている。さらに単レンズ66は、長さ10μm、幅2μmの小さなカンチレバーにも集光できるように、そのNAが0.4以上の光学特性を備えている。
【0066】
このように構成された走査機構60においては、二つの圧電素子21,41と単レンズ66が、X−Y平面への投影においてX軸に沿って並ぶように配置されている。単レンズ66は、その重心がXY可動部64の重心を通るX−Y平面にほぼ一致するように保持されている。また、二つの圧電素子21,41はほぼ同形状・同質量であるため、二つの圧電素子21,41で構成されるZアクチュエータは、その重心がXY可動部64の重心を通るX−Y平面にほぼ一致するように保持されている。その結果、XY可動部64を高速でXY方向に走査する際に生じる「慣性力に起因するXY可動部64の揺れ振動」が低減される。さらに、二つの圧電素子21,41で構成されるZアクチュエータは、XY可動部64の重心を通るX−Y平面に対してほぼ対称形となる。これは「慣性力に起因するXY可動部64の揺れ振動」を相殺するカウンターバランスとして働く。その結果、「慣性力に起因するXY可動部64の揺れ振動」がより低減される。加えて、二つの圧電素子21,41で構成されるZアクチュエータにより、カンチレバー23をZ方向に走査する際に生じる振動ノイズもほぼ0に抑えられる。さらに、単レンズ66の光軸68がX−Y平面に垂直な軸に対して5度ないし20度になるよう傾けて保持されているので、カンチレバー23に対して垂直に収束光を入射させることができる。また単レンズ66は、そのNAが0.4以上の光学特性を備えている。その結果、カンチレバー23に形成する集光スポット径を直径2μm程度にまで小さくすることができる。これはカンチレバー23の変位検出の精度向上に効果がある。
【0067】
<第三実施形態>
本実施形態は、走査機構に向けられている。以下、図11〜図13を参照しながら本実施形態について説明する。
【0068】
第二実施形態に示した走査機構40,50,60は、Z軸に沿って反対側に延びている二つの圧電素子21,41を有し、カンチレバー23をZ方向に走査する際に生じる振動ノイズをほぼ0に抑えている。しかしながらZ方向への走査は最大100kHz以上にも及ぶため、走査の衝撃により、二つの圧電素子21,41が設けられたXY可動部の土台部が変形するという問題がある。走査機構50を例にしたXY可動部54の土台部が変形する様子を図11に示す。この変形は、最大100kHz以上の振動ノイズとなって集光部(走査機構50では単レンズ56)に伝わる。集光部は、その外周部だけでXY可動部に保持されているため振動ノイズに対して強固であるとは言えず、その結果、集光部がXY可動部に対して振動する。これはAFM観察の高精度化を妨げる。
【0069】
図12は、上記問題を解決する本実施形態である走査機構70の上面図であり、図13は、図12中のF−F線に沿った走査機構70の断面図である。図12と図13において、図7と図8に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0070】
図12と図13に示すように、走査機構70はXYステージ73を有し、XYステージ73はXY可動部74を有している。走査機構70はまた、XY可動部74に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部74に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42と、XY可動部74に保持された単レンズ76を有している。単レンズ76は、XY可動部74に形成された貫通穴75内に配置され、XY可動部74の厚み内に収まっている。望ましくは、単レンズ76は、その重心がXY可動部74の重心を通るX−Y平面にほぼ一致するように保持されている。
【0071】
XY可動部74に設けられた単レンズ76と二つの圧電素子21,41から成るZアクチュエータが、X−Y平面への投影においてX軸に沿って並ぶように配置されている。単レンズ76と二つの圧電素子21,41から成るZアクチュエータとの間には、それらを機械的に分離するように、XY可動部74を貫通する開口部77が設けられている。
【0072】
このように構成された走査機構70においては、二つの圧電素子21,41と単レンズ76との間に、それらを機械的に分離する開口部77が設けられているため、Z方向への走査の際に生じる振動ノイズの単レンズ76への伝達が低減される。
【0073】
[変形例]
さらにこの走査機構では次の変形が可能である。第三実施形態の変形例である走査機構80を図14と図15に示す。図14は、本実施形態の変形例である走査機構80の上面図であり、図15は、図14中のG−G線に沿った走査機構80の断面図である。図14と図15において、図12と図13に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0074】
図14と図15に示すように、走査機構80はXYステージ83を有し、XYステージ83はXY可動部84を有している。走査機構80はまた、XY可動部84に保持された圧電素子21と、圧電素子21に保持されたホルダ22と、ホルダ22に保持されたカンチレバー23と、XY可動部84に保持された圧電素子41と、圧電素子41に保持された疑似ホルダ42と、XY可動部84に保持された単レンズ86を有している。
【0075】
単レンズ86は、XY可動部84に形成された貫通穴85内に配置されている。単レンズ86を保持するためのXY可動部84に設けられた貫通穴85は、単レンズ86の外形(円)を僅かに広げた楕円形あるいは卵形をしており、単レンズ86は、貫通穴85内において、二つの圧電素子21,41から離れた位置で保持されている。すなわち、単レンズ86の外周部の一部分、例えば半分ないし3/4が貫通穴85に接合され、残りの外周部は貫通穴85に接触しないように保持されている。その結果、二つの圧電素子21,41に最も近い単レンズ86の部分とXY可動部84の間にすき間すなわち開口部87が形成されている。開口部87は、単レンズ86とXY可動部84を機械的に分離している。さらに単レンズ86は、XY可動部84の厚み内に収まっており、望ましくは、その重心がXY可動部84の重心を通るX−Y平面にほぼ一致するように保持されている。
【0076】
このように構成された走査機構80においては、二つの圧電素子21,41と単レンズ86との間には、それらを機械的に分離するように、開口部87が形成されている。さらに単レンズ86は、二つの圧電素子21,41から離れた位置で保持されている。このため、単レンズ86は、二つの圧電素子21,41を保持しているXY可動部84の土台部とは完全に機械的に分離されている。その結果、Z方向への走査の際に生じる振動ノイズの単レンズ86への伝達がより低減される。
【0077】
第三実施形態の別の変形例を図16に示す。図16に示す走査機構90は、単レンズ96の配置を除いては、走査機構80と同じである。単レンズ96は、その光軸98がX−Y平面に垂直な軸に対して5度ないし20度になるよう傾けて保持されてもよい。このような構成においても、単レンズ96への振動ノイズの伝達の低減について同様の効果を得ることができる。
【0078】
<第四実施形態>
本実施形態は、第二実施形態の走査機構を備えた走査型プローブ顕微鏡に向けられている。以下、図17を参照しながら本実施形態について説明する。図17は、本実施形態による走査型プローブ顕微鏡100を示している。
【0079】
図17に示すように、本実施形態の走査型プローブ顕微鏡100は、カンチレバー23を保持した走査機構50と、ホストコンピュータ101と、Z制御部103を備えたコントローラ102と、レーザ光源111と、分割ディテクタ112と、Z圧電ドライバ106と、XY圧電ドライバ107を備えている。カンチレバー23に対向する位置には、試料台117に載置された試料116が配置されている。
【0080】
走査機構50は、カンチレバー23をX軸とY軸とZ軸に沿って走査するためのものであり、その詳細な構成は第二実施形態(図7と図8)で説明した通りである。この走査機構50は図示しない鏡枠によって保持されている。
【0081】
カンチレバー23は、試料116に対向して配置されるプローブを柔軟なレバー部の自由端に備えており、カンチレバー23は試料116との相互作用に応じてZ軸に沿って変位する。
【0082】
レーザ光源111と分割ディテクタ112は、カンチレバー23の自由端のZ軸に沿った変位を光学的に検出するための光学式変位センサーを構成しており、図示しない鏡枠に保持されている。
【0083】
Z圧電ドライバ106は、走査機構50に搭載された二つの圧電素子21,41を駆動するためのものである。
【0084】
XY圧電ドライバ107は、走査機構50に搭載された圧電素子12A,12Bを駆動するためのものである。
【0085】
コントローラ102は、Z圧電ドライバ106とXY圧電ドライバ107を制御するためのものある。
【0086】
ホストコンピュータ101は、カンチレバー23の変位情報と走査機構50の走査情報とに基づいて試料116の物理情報を取得する処理部を構成している。
【0087】
本実施形態の走査型プローブ顕微鏡は以下のように動作する。
【0088】
レーザ光源111と分割ディテクタ112で構成される光学式変位センサーは、例えば走査型プローブ顕微鏡によく用いられる光てこセンサーであり、レーザ光源111から照射されたコリメートレーザ光113は、走査機構50に設けられた単レンズ56を介してカンチレバー23上に直径数μm程度の集光スポットを形成し、その反射光を分割ディテクタ112で受けることで、カンチレバー23の自由端にある機械的探針24のZ変位をとらえる。分割ディテクタ112は、カンチレバー23のZ変位を反映した変位信号をコントローラ102に出力する。
【0089】
コントローラ102は、XY方向にラスター走査するためのXY走査信号を生成し、XY走査信号をXY圧電ドライバ107とホストコンピュータ101に供給する。コントローラ102はZ制御部103を含んでおり、Z制御部103は、分割ディテクタ112で得られるカンチレバー23の変位情報を一定に維持するようにZ圧電ドライバ106を制御するためのZ走査信号を生成し、そのZ走査信号をZ圧電ドライバ106とホストコンピュータ101に供給する。
【0090】
Z圧電ドライバ106は、コントローラ102から供給されるZ走査信号を所定のゲインで増幅してZ駆動信号を生成し、Z駆動信号を走査機構50に搭載された二つの圧電素子21,41に供給する。
【0091】
XY圧電ドライバ107は、コントローラ102から供給されるXY走査信号を所定のゲインで増幅してXY駆動信号を生成し、XY駆動信号を走査機構50に搭載された圧電素子12A,12Bに供給する。具体的には、コントローラ102から供給されるX走査信号を増幅して生成したX駆動信号を圧電素子12Aに供給し、コントローラ102から供給されるY走査信号を増幅して生成したY駆動信号を圧電素子12Bに供給する。
【0092】
ホストコンピュータ101は、コントローラ102から供給されるXY走査信号とZ走査信号とに基づいて試料116の表面形状の三次元画像を構築し、これをモニター上に表示する。
【0093】
この走査型プローブ顕微鏡100では、走査機構50を用いることにより、高精度にXY方向に高速走査される。従ってこの走査型プローブ顕微鏡100によれば、観察分解能が向上し、観察時間が短縮される。
【0094】
[変形例]
さらにこの走査型プローブ顕微鏡では次の変形が可能である。第四実施形態の変形例である走査型プローブ顕微鏡120を図18に示す。図18において、図17に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0095】
図18に示した走査型プローブ顕微鏡120は、図17に示した走査機構50を走査機構60に置き換えた構成になっている。さらに、レーザ光源121とビームスプリッタ122と波長板123と分割ディテクタ124を備えている。
【0096】
レーザ光源121とビームスプリッタ122と波長板123と分割ディテクタ124は、カンチレバー23の自由端のZ軸に沿った変位を光学的に検出するための光学式変位センサーを構成しており、それぞれ図示しない鏡枠に保持されている。これらで構成される光学式変位センサーは、例えば走査型プローブ顕微鏡によく用いられる光てこセンサーであり、レーザ光源121から照射されたコリメートレーザ光125は、ビームスプリッタ122と波長板123を介して走査機構60に設けられた単レンズ66に照射され、カンチレバー23上に直径2μm程度の集光スポットを形成する。その反射光は、波長板123を通ることでビームスプリッタ122によって偏向されて分割ディテクタ124に入射する。分割ディテクタ124は、カンチレバー23のZ変位を反映した変位信号をコントローラ102に出力する。
【0097】
この走査型プローブ顕微鏡120では、走査機構60を用いることにより、高精度にXY方向に高速走査される。従ってこの走査型プローブ顕微鏡120によれば、観察分解能が向上し、観察時間が短縮される。またこの走査型プローブ顕微鏡120によれば、走査機構60によりカンチレバーへ照射する集光スポット径を直径2μm程度にまで小さくすることができる。これはカンチレバー23の変位検出の精度向上に効果がある。従ってこの走査型プローブ顕微鏡120によれば、より高精度に試料を観察することができる。
【0098】
<第五実施形態>
本実施形態は、第二実施形態の走査機構を備えた走査型プローブ顕微鏡に向けられている。図19を参照しながら本実施形態について説明する。図19は、本実施形態による走査型プローブ顕微鏡130を示している。図19において、図18に示した部材と同一の参照符号を付した部材は同様の部材であり、その詳しい説明は省略する。
【0099】
図19に示した走査型プローブ顕微鏡130は、コリメートレーザ光136を出射するレーザ光源131と、ビームスプリッタ132と、波長板133と、ハーフミラー135と、分割ディテクタ134、対物レンズ141と、照明光144を出射する照明光源142と、照明光144を集光するコンデンサレンズ143を備えている。
【0100】
レーザ光源131とビームスプリッタ132と波長板133と分割ディテクタ134とハーフミラー135は、カンチレバー23の自由端のZ軸に沿った変位を光学的に検出するための光学式変位センサーを構成しており、それぞれ図示しない鏡枠に保持されている。これらで構成される変位センサーは、例えば走査型プローブ顕微鏡によく用いられる光てこ方式の変位センサーであり、レーザ光源131から出射されたコリメートレーザ光136は、ビームスプリッタ132と波長板133とハーフミラー135を介して走査機構60に設けられた単レンズ66に照射され、カンチレバー23上に直径2μm程度の集光スポットを形成する。そしてその反射光は、単レンズ66とハーフミラー135と波長板123を通り、ビームスプリッタ132で分割ディテクタ134側に反射される。分割ディテクタ134は、カンチレバー23のZ変位を反映した変位信号をコントローラ102に出力する。
【0101】
また照明光源142から出射された照明光144は、コンデンサレンズ143とハーフミラー135と単レンズ66を通って試料116に照射され、対物レンズ141に入射される。これにより倒立型光学顕微鏡によって試料116が透過観察される。
【0102】
この走査型プローブ顕微鏡130では、走査機構60を用いることにより、高精度にXY方向に高速走査される。従ってこの走査型プローブ顕微鏡130によれば、観察分解能が向上し、観察時間が短縮される。
【0103】
またこの走査型プローブ顕微鏡130によれば、走査機構60によりカンチレバーへ照射する集光スポット径を直径2μm程度にまで小さくすることができる。これはカンチレバー23の変位検出の精度向上に効果がある。従ってこの走査型プローブ顕微鏡130によれば、より高精度に試料を観察することができる。
【0104】
さらにこの走査型プローブ顕微鏡130では、倒立型光学顕微鏡による試料116の透過観察が可能になっている。これは試料116の観察位置決めなど、操作性の向上につながる。
【0105】
これまで、図面を参照しながら本発明の実施形態を述べたが、本発明は、これらの実施形態に限定されるものではなく、その要旨を逸脱しない範囲において様々な変形や変更が施されてもよい。ここにいう様々な変形や変更は、上述した実施形態を適当に組み合わせた実施も含む。
【符号の説明】
【0106】
10…走査機構、11…固定枠、12A,12B…圧電素子、13…XYステージ、14…XY可動部、15…支持部、16A,16B,16C,16D…弾性部、17A,17B…押圧部、21…圧電素子、22…ホルダ、23…カンチレバー、24…機械的探針、25…集光部、26A,26B…集光レンズ、27…筒体、28…光軸、29…レーザ光、30…走査機構、33…XYステージ、34…XY可動部、35…角穴、40…走査機構、41…圧電素子、42…疑似ホルダ、43…XYステージ、44…XY可動部、50…走査機構、53…XYステージ、54…XY可動部、55…貫通穴、56…単レンズ、60…走査機構、63…XYステージ、64…XY可動部、65…貫通穴、66…単レンズ、68…光軸、70…走査機構、73…XYステージ、74…XY可動部、75…貫通穴、76…単レンズ、77…開口部、80…走査機構、83…XYステージ、84…XY可動部、85…貫通穴、86…単レンズ、87…開口部、90…走査機構、96…単レンズ、89…光軸、100…走査型プローブ顕微鏡、101…ホストコンピュータ、102…コントローラ、103…Z制御部、106…Z圧電ドライバ、107…XY圧電ドライバ、111…レーザ光源、112…分割ディテクタ、113…レーザ光、116…試料、117…試料台、120…走査型プローブ顕微鏡、121…レーザ光源、122…ビームスプリッタ、123…波長板、124…分割ディテクタ、125…レーザ光、130…走査型プローブ顕微鏡、131…レーザ光源、132…ビームスプリッタ、133…波長板、134…分割ディテクタ、135…ハーフミラー、136…レーザ光、141…対物レンズ、142…照明光源、143…コンデンサレンズ、144…照明光。
【特許請求の範囲】
【請求項1】
カンチレバーと、
X−Y平面に平行なXY方向に移動可能なXY可動部と、
前記XY可動部をXY方向に走査するXYアクチュエータと、
前記XY可動部に保持された、X−Y平面に垂直なZ方向に前記カンチレバーを走査するZアクチュエータと、
前記XY可動部に保持された、前記カンチレバーの変位を検出するための光を前記カンチレバーに入射させる集光部とを備え、
前記Zアクチュエータと前記集光部は、X−Y平面への投影において並ぶように配置されている走査機構。
【請求項2】
前記Zアクチュエータの重心と前記集光部の重心がいずれも前記XY可動部の厚み内に収まっている請求項1に記載の走査機構。
【請求項3】
前記Zアクチュエータが、Z軸に沿って伸縮し得る実質的に同一の二つの積層型圧電素子を有し、前記二つの積層型圧電素子はそれぞれ前記XY可動部からZ軸に沿って反対側に延びている請求項2に記載の走査機構。
【請求項4】
前記二つの積層型圧電素子の一方の自由端には、前記カンチレバーを保持するホルダが保持され、前記二つの積層型圧電素子の他方の自由端には、前記ホルダとほぼ同質量の疑似ホルダが保持されている請求項3に記載の走査機構。
【請求項5】
前記集光部が単レンズである請求項4に記載の走査機構。
【請求項6】
前記カンチレバーは、X−Y平面に対して5度ないし20度の角度で前記ホルダに保持され、
前記単レンズは、その光軸がZ軸に対して5度ないし20度の角度で前記XY可動部に保持されている請求項5に記載の走査機構。
【請求項7】
前記単レンズの直径が10mm以下である請求項6に記載の走査機構。
【請求項8】
前記単レンズのNAが0.4以上である請求項7に記載の走査機構。
【請求項9】
前記XY可動部は、前記Zアクチュエータと前記集光部の間に設けられた開口部を有している請求項2に記載の走査機構。
【請求項10】
前記Zアクチュエータが、Z軸に沿って伸縮し得る実質的に同一の二つの積層型圧電素子を有し、前記二つの積層型圧電素子はそれぞれ前記XY可動部からZ軸に沿って反対側に延びている請求項9に記載の走査機構。
【請求項11】
前記二つの積層型圧電素子の一方の自由端には前記カンチレバーを保持するホルダが保持され、前記二つの積層型圧電素子の他方の自由端には、前記ホルダ(およびカンチレバー)とほぼ同質量の疑似ホルダが保持されている請求項10に記載の走査機構。
【請求項12】
前記集光部が単レンズである請求項11に記載の走査機構。
【請求項13】
前記カンチレバーは、X−Y平面に対して5度ないし20度の角度で前記ホルダに保持され、
前記単レンズは、その光軸がZ軸に対して5度ないし20度の角度で前記XY可動部に保持されている請求項12に記載の走査機構。
【請求項14】
前記単レンズの直径が10mm以下である請求項13に記載の走査機構。
【請求項15】
前記単レンズのNAが0.4以上である請求項14に記載の走査機構。
【請求項16】
前記開口部は、前記Zアクチュエータに最も近い前記集光部の部分と前記XY可動部の間に形成され、前記集光部と前記XY可動部を機械的に分離している請求項9に記載の走査機構。
【請求項17】
前記Zアクチュエータが、Z軸に沿って伸縮し得る実質的に同一の二つの積層型圧電素子を有し、前記二つの積層型圧電素子はそれぞれ前記XY可動部からZ軸に沿って反対側に延びている請求項16に記載の走査機構。
【請求項18】
前記二つの積層型圧電素子の一方の自由端には前記カンチレバーを保持するホルダが保持され、前記二つの積層型圧電素子の他方の自由端には、前記ホルダとほぼ同質量の疑似ホルダが保持されている請求項17に記載の走査機構。
【請求項19】
前記集光部が単レンズである請求項18に記載の走査機構。
【請求項20】
前記カンチレバーは、X−Y平面に対して5度ないし20度の角度で前記ホルダに保持され、
前記単レンズは、その光軸がZ軸に対して5度ないし20度の角度で前記XY可動部に保持されている請求項19に記載の走査機構。
【請求項21】
前記単レンズの直径が10mm以下である請求項20に記載の走査機構。
【請求項22】
前記単レンズのNAが0.4以上である請求項21に記載の走査機構。
【請求項23】
請求項1〜請求項22のいずれかひとつに記載の走査機構を備えた走査型プローブ顕微鏡。
【請求項24】
倒立型光学顕微鏡を備えた請求項23に記載の走査型プローブ顕微鏡。
【請求項25】
光学顕微鏡用の照明光源と、光学顕微鏡用の対物レンズを備え、前記照明光源から照射される照明光を前記集光部を通して試料の透過観察を行う請求項24に記載の走査型プローブ顕微鏡。
【請求項1】
カンチレバーと、
X−Y平面に平行なXY方向に移動可能なXY可動部と、
前記XY可動部をXY方向に走査するXYアクチュエータと、
前記XY可動部に保持された、X−Y平面に垂直なZ方向に前記カンチレバーを走査するZアクチュエータと、
前記XY可動部に保持された、前記カンチレバーの変位を検出するための光を前記カンチレバーに入射させる集光部とを備え、
前記Zアクチュエータと前記集光部は、X−Y平面への投影において並ぶように配置されている走査機構。
【請求項2】
前記Zアクチュエータの重心と前記集光部の重心がいずれも前記XY可動部の厚み内に収まっている請求項1に記載の走査機構。
【請求項3】
前記Zアクチュエータが、Z軸に沿って伸縮し得る実質的に同一の二つの積層型圧電素子を有し、前記二つの積層型圧電素子はそれぞれ前記XY可動部からZ軸に沿って反対側に延びている請求項2に記載の走査機構。
【請求項4】
前記二つの積層型圧電素子の一方の自由端には、前記カンチレバーを保持するホルダが保持され、前記二つの積層型圧電素子の他方の自由端には、前記ホルダとほぼ同質量の疑似ホルダが保持されている請求項3に記載の走査機構。
【請求項5】
前記集光部が単レンズである請求項4に記載の走査機構。
【請求項6】
前記カンチレバーは、X−Y平面に対して5度ないし20度の角度で前記ホルダに保持され、
前記単レンズは、その光軸がZ軸に対して5度ないし20度の角度で前記XY可動部に保持されている請求項5に記載の走査機構。
【請求項7】
前記単レンズの直径が10mm以下である請求項6に記載の走査機構。
【請求項8】
前記単レンズのNAが0.4以上である請求項7に記載の走査機構。
【請求項9】
前記XY可動部は、前記Zアクチュエータと前記集光部の間に設けられた開口部を有している請求項2に記載の走査機構。
【請求項10】
前記Zアクチュエータが、Z軸に沿って伸縮し得る実質的に同一の二つの積層型圧電素子を有し、前記二つの積層型圧電素子はそれぞれ前記XY可動部からZ軸に沿って反対側に延びている請求項9に記載の走査機構。
【請求項11】
前記二つの積層型圧電素子の一方の自由端には前記カンチレバーを保持するホルダが保持され、前記二つの積層型圧電素子の他方の自由端には、前記ホルダ(およびカンチレバー)とほぼ同質量の疑似ホルダが保持されている請求項10に記載の走査機構。
【請求項12】
前記集光部が単レンズである請求項11に記載の走査機構。
【請求項13】
前記カンチレバーは、X−Y平面に対して5度ないし20度の角度で前記ホルダに保持され、
前記単レンズは、その光軸がZ軸に対して5度ないし20度の角度で前記XY可動部に保持されている請求項12に記載の走査機構。
【請求項14】
前記単レンズの直径が10mm以下である請求項13に記載の走査機構。
【請求項15】
前記単レンズのNAが0.4以上である請求項14に記載の走査機構。
【請求項16】
前記開口部は、前記Zアクチュエータに最も近い前記集光部の部分と前記XY可動部の間に形成され、前記集光部と前記XY可動部を機械的に分離している請求項9に記載の走査機構。
【請求項17】
前記Zアクチュエータが、Z軸に沿って伸縮し得る実質的に同一の二つの積層型圧電素子を有し、前記二つの積層型圧電素子はそれぞれ前記XY可動部からZ軸に沿って反対側に延びている請求項16に記載の走査機構。
【請求項18】
前記二つの積層型圧電素子の一方の自由端には前記カンチレバーを保持するホルダが保持され、前記二つの積層型圧電素子の他方の自由端には、前記ホルダとほぼ同質量の疑似ホルダが保持されている請求項17に記載の走査機構。
【請求項19】
前記集光部が単レンズである請求項18に記載の走査機構。
【請求項20】
前記カンチレバーは、X−Y平面に対して5度ないし20度の角度で前記ホルダに保持され、
前記単レンズは、その光軸がZ軸に対して5度ないし20度の角度で前記XY可動部に保持されている請求項19に記載の走査機構。
【請求項21】
前記単レンズの直径が10mm以下である請求項20に記載の走査機構。
【請求項22】
前記単レンズのNAが0.4以上である請求項21に記載の走査機構。
【請求項23】
請求項1〜請求項22のいずれかひとつに記載の走査機構を備えた走査型プローブ顕微鏡。
【請求項24】
倒立型光学顕微鏡を備えた請求項23に記載の走査型プローブ顕微鏡。
【請求項25】
光学顕微鏡用の照明光源と、光学顕微鏡用の対物レンズを備え、前記照明光源から照射される照明光を前記集光部を通して試料の透過観察を行う請求項24に記載の走査型プローブ顕微鏡。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2012−185066(P2012−185066A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−49104(P2011−49104)
【出願日】平成23年3月7日(2011.3.7)
【出願人】(000000376)オリンパス株式会社 (11,466)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月7日(2011.3.7)
【出願人】(000000376)オリンパス株式会社 (11,466)
[ Back to top ]