
走行データ収集装置、収集プログラム及び方法
【課題】車載装置で走行道路の空間的な形状など知らなくても、送信する軌跡データの間引きを、最小限の計算負荷で、かつリアルタイムに行うこと。
【解決手段】車両の軌跡データ(A〜F)及び方位データを、当該車両の走行に従い複数取得し、ある時点の方位データとそれよりも過去の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の方位差との変化量が許容誤差内にあるかどうかを判定し、前記判定により前記方位差の変化量が前記許容誤差を超えている場合(E)に当該軌跡データを含む走行データを送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合(B〜D)に当該軌跡データを含む走行データを送信の対象としないで、当該車両から前記送信の対象となった走行データのみを送信する。
【解決手段】車両の軌跡データ(A〜F)及び方位データを、当該車両の走行に従い複数取得し、ある時点の方位データとそれよりも過去の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の方位差との変化量が許容誤差内にあるかどうかを判定し、前記判定により前記方位差の変化量が前記許容誤差を超えている場合(E)に当該軌跡データを含む走行データを送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合(B〜D)に当該軌跡データを含む走行データを送信の対象としないで、当該車両から前記送信の対象となった走行データのみを送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交通情報処理のために必要な走行データを収集して送信することのできる装置並びにその収集方法及びプログラムに関するものである。
ここで「走行データ」とは、特定車両に搭載された車載装置で取得した、所定時間ごと又は所定走行距離ごとの車両の位置、速度、方位、時刻等のデータである。また「特定車両」とは、交通情報収集のために必要な走行データを収集し送信することのできる特定の車載装置を搭載した車両をいう。また、「車両」とは自動車、原動機付自転車、軽車両及びトロリーバスをいう。「車載装置」とは車両に搭載され走行データを収集し送信する装置をいう。
【背景技術】
【0002】
旅行時間、渋滞度などの交通情報を算出処理するために特定車両から送信された走行データを利用するシステムが知られている。
このシステムでは車載装置で収集された走行データを送信する場合、携帯電話機などを使って広域無線回線網経由で送信することも、光ビーコン、無線LAN、DSRCなどの狭帯域通信方式を用いて送信することも可能である。後者では、路側に設置された路上装置でデータを受信し中継することになる。
【0003】
いずれの場合も、一回の特定車両からの送信では伝送可能な容量が限られている。
すなわち、特定車両では、一定のサンプリング間隔で走行データを収集しているが、低速走行時には走行データの蓄積量が膨大となってしまうと、全ての情報を一度に路上装置に送信できなくなる。また、携帯電話機で走行データを送信する場合、走行データの容量が大きいと通信費用が高くなる。
【0004】
一方、走行データの収集周期を粗くすれば、計測する交通情報の精度を維持することができなくなる。
このため、車両側では走行データを効率よく収集し送信することが求められている。
そこで、[非特許文献1]のように、送信される走行データを圧縮することによりデータの送信容量を低減する技術が提案されている。
【非特許文献1】電子情報通信学会技術研究報告Vol. 104, No. 762, pp. 13-18 (2005.03.22)
【発明の開示】
【発明が解決しようとする課題】
【0005】
前記非特許文献1の圧縮技術は、車両の走行道路の空間的な軌跡形状に着目してデータの間引き(この文献では「リサンプル」と言っている)を行うが、これにはまず「走行道路の空間的な軌跡形状」を把握しておかなければならない。このため、走行しようとする道路の曲率半径ρを、道路地図データなどに基づいて把握しておかなければならない。よって、車載装置のデータ処理負荷が増大し、車載装置の規模が大きくなり、高価になるという問題がある。
【0006】
そこで本発明は、走行道路の空間的な軌跡形状などを知らなくても送信するデータの間引きを、最小限の計算負荷で、かつリアルタイムに行うことにより、情報伝送効率を高めることのできる走行データ収集装置、その収集プログラム及び方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の走行データ収集装置は、車両の軌跡データ及び方位データを、当該車両の走行に従い複数取得するサンプリング手段と、ある時点の方位データとそれよりも過去の時点の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の時点の方位差との変化量が許容誤差内にあるかどうかを判定する判定手段と、当該車両から少なくともその時点の前記軌跡データを含む走行データを送信する送信手段と、管理手段とを備え、前記管理手段は、前記判定手段の判定により前記方位差の変化量が前記許容誤差を超えている場合に当該走行データを前記送信手段により送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合に当該走行データを前記送信手段により送信の対象としないことを特徴とする。
【0008】
この走行データ収集装置によれば、方位差の変化量が許容誤差を超えている場合に当該走行データを送信の対象とするが、許容誤差を超えていない場合は単調な形状の道路を走行していると判断して、当該走行データを前記送信手段により送信の対象としない。単調な形状の道路は、走行データを一部間引いても、その軌跡データの地図マッチングによる再現が可能である。したがって、車両から走行データを送信する容量を減らすことにより情報伝送効率を高めることができる。また、本発明では、道路形状を予め知っておかなくても、走行データを送信する、しないの判断ができるので、リアルタイムな情報伝送を実現することができる。
【0009】
なお、本発明の技術では、前記非特許文献1の圧縮技術と比較して、次の点で異なっている。非特許文献1は、曲率半径の大きさに応じてリサンプル長を決定している。すなわち、曲率半径が大きいときリサンプル長を長くし、曲率半径が小さいときリサンプル長を短くしている。したがって、曲率半径が小さいけれども、ほぼ一定の曲率半径が続く単調なカーブの道路の場合、非特許文献1の技術では、リサンプル長は短くなる。ところが本発明では、ほぼ一定の曲率半径が続く単調なカーブの道路の場合、曲率半径の大きい小さいに係わらず、リサンプル長は長くなる。このため、本発明の技術では、非特許文献1に比べ、データを間引く機会がさらに増加する。従って、送信するデータ量をさらに減らすことができる。
【0010】
当該車両が前回の送信から所定時間走行した場合又は所定距離走行した場合、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることが好ましい。これは、方位差の変化量が許容誤差を超えない条件が長時間若しくは長距離続いた場合に走行データの送信が長く途絶えることを防ぐためである。
【0011】
また当該車両の車両情報を検出する車両情報検出手段をさらに含み、ある時点の車両情報とそれよりも過去の時点の車両情報との変化量が所定範囲内にあるかどうかを判定し、車両情報の変化量が前記所定範囲を超えているならば、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることも可能である。この車両情報として、ワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、燃費、ドア開閉機構などの各車載システムの使用状況の情報がある。
【0012】
また 当該車両の速度の変化量が所定範囲内にあるかどうかを判定し、速度の変化量が前記所定範囲を超えているならば、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることも可能である。車両が大きく加速、減速しているとき、速度の変化量が大きくなるが、この場合に、当該走行データを前記送信手段により送信の対象とすることで、例えば直線道路上でストップ/ゴーをくりかえしても、その車両の挙動を正確に再現できる。
【0013】
当該車両の走行している道路の道路種別を検出し、前記許容誤差を、この走行道路の道路種別に依存する関数としてもよい。例えば高速道路では、走行軌跡は通常一般道路よりも緩やかに変化するので、方位差の変化量を判定する場合の閾値である許容誤差を小さくすることができる。これにより、道路形状の変化を適切に判定できる。
また 当該車両の走行している道路の周辺に道路があるかどうかを検出し、前記許容誤差を、この周辺道路の有無に依存する関数としてもよい。周辺道路とは、当該車両が走行している道路から所定距離以内にある道路、当該車両が走行している道路から所定距離以内で当該道路につながっている道路、などをいう。周辺道路が存在するときは、車両の走行軌跡を細かく把握し、走行規制の再現性を高めることが、正確な旅行時間などを得るために望ましいからである。周辺道路が存在しない時は、旅行時間計算などのため地図マッチングを行っても他の道路に誤マッチングすることは少ないため、許容誤差を大きくとることができ、よりデータ量の削減が期待できる。
【0014】
前記許容誤差は、車両の軌跡データのサンプリング間隔が広ければ大きく、サンプリング間隔が狭ければ小さく設定することが望ましい。これは、粗くサンプリングしている場合単調な形状の道路と判定する機会を減らし、小刻みにサンプリングしている場合単調な形状の道路と判定する機会を増やすためである。
前記判定手段の判定基準を式で表現すると、次のようになる。ある時点の方位をθi、それよりも過去の時点の方位をθi-1、その時点の方位差とそれよりも過去の時点の方位差との変化量をα(i) (α(i)=θi−θi-1) 、許容誤差をδと表記した場合、
−δ<[α(i) −α(i-1) ]<δ
となる。
【0015】
また本発明の走行データ収集プログラムは、車載コンピュータに格納されることによって、車両から当該車両の走行データを送信することができるプログラムであって、実質的に前記走行データ収集装置の機能を実現するためのプログラムである。
本発明の走行データ収集方法は、実質的に前記走行データ収集装置の機能を実現するための方法である。
【発明の効果】
【0016】
以上のように本発明によれば、道路形状が単調な場合に一部の走行データを送信しないことにより、送信データ量を削減することができるとともに、間引かれたデータを用いても十分地図マッチング精度を維持することができる。したがって、送信された走行データを旅行時間計算などのために活用することができる。
また、走行データの送信料を、走行データを利用している一般ユーザが負担している場合、データの送信量を削減することで、一般ユーザへの負担を軽減することもできる。
【発明を実施するための最良の形態】
【0017】
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
図1は、本発明の走行データ収集装置の一例である走行情報収集システムの全体構成を示す概略図である。
この走行情報収集システムは、特定車両の位置、速度、方位などの走行データを走行情報収集センタに送信し、走行情報収集センタでは、収集した走行データを処理することによって、さまざまな交通情報を取得して利用するシステムをいう。
【0018】
この明細書では、特定車両内のワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、燃費、ドア開閉機構などの各種システムの作動状況の情報を「車両情報」という。
走行情報収集システムは、図1に示されるように、車載装置1と、道路脇に設置された路上装置2と、走行情報収集センタ3とを備えている。
【0019】
車載装置1は、各特定車両に搭載され、当該車両の識別、車種の識別のためのコードを持っている。車載装置1は路上装置2と通信することができる。車載装置1は、サンプリング時間T(例えば1秒)ごとに時刻、当該車両の位置、速度、方位等のデータや車両情報を取得する。取得されたデータは、車載装置1から送信される。なお、単位時間あたりでなく単位走行距離ごとにサンプリングを行っても良い。
【0020】
路上装置2は、超音波感知器などを用いて交通情報の作成対象となる道路の交通量(単位時間あたりの通過台数)等を測定するとともに、車載装置1から取得される走行データを収集して、走行情報収集センタ3に転送する。
走行情報収集センタ3は、図1に示したように、路上装置2とは別の場所に設置され、通信回線でつながれている。なお、路上装置2と同一の場所に設置されていてもよい。
【0021】
車載装置1と路上装置2との間の路車間通信の方式としては、光ビーコン、無線LAN、DSRC(Dedicated Short Range Communication)等の、比較的エリアの狭い、双方向通信方式を用いることができる。
図2は、車載装置1の内部構成を示すブロック図である。
車載装置1は、路上装置2との間で路車間通信を行う無線部11、通信制御を行う通信制御部12、人工衛星の電波を利用して時刻ごとの車両位置検出を行うGPS処理部13、地図上の位置を見つけるための地図データベース14、車輪速センサ等からの車速パルス等に基づいて車両の車速データ、加車速データ等を得るとともに、ワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、燃費、ドア開閉機構など各種の車両情報を取得する車両情報管理部15を備えている。
【0022】
さらに、車載装置1は、GPS処理部13から取得した車両位置情報、車両情報管理部15から取得した車両の車速データ、加車速データ等を走行データとして管理するとともに、車両情報管理部15から取得した車両情報を管理する走行データ管理部16、管理されている走行データを一時的に保存する一次メモリ17、一次メモリ17に保存されている走行データの中から送信するデータを選別して一時的に保存する送信用メモリ18を備えている。前記「選別する」とは、この発明の実施形態では、後述するデータ選別アルゴリズムを用いて、一次メモリ17に保存されている走行データの一部を選別すること、すなわち間引くことをいう。この送信用メモリ18に保存されている走行データは、車両が路上装置2の側を通過したときに、車載装置1から送信され、路上装置2を経由して走行情報収集センタ3に提供される。
【0023】
なお、いままでの説明では、車載装置1として路上装置2を経由して通信するシステムを想定してきた。
しかし、車載装置は走行データを走行情報収集センタ3に送信する機能を有するものであれば、どのような通信方式を採用した装置であってもよい。たとえば、路上装置2との間で路車間通信を行う無線部11の機能、通信制御を行う通信制御部12の機能を、簡単に車両に持ち込める携帯電話機を用いて実現してもよい。
【0024】
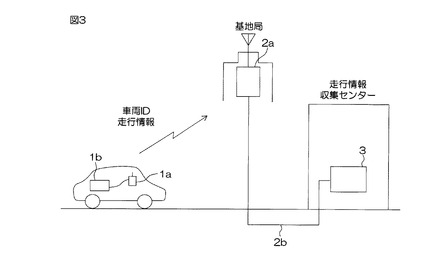
図3は、このような携帯電話機1aを用いた走行情報収集システムの全体構成を示す概略図である。このシステムでは、車載装置1の無線部11の機能および通信制御部12の機能を、携帯電話機1aで実現している。図3に“1b”で示したブロック(車載装置本体という)は、車載装置1から、無線部11の機能、通信制御部12の機能を除いた部分を示している。携帯電話機1aの送信電波は通常マイクロ波であり、この電波は基地局2aで受信され、公衆通信回線2bを使って走行情報収集センタ3に集められることになる。なお、通信制御部12の機能は、携帯電話機1aでなく車載装置本体1bに受け持たせてもよい。
【0025】
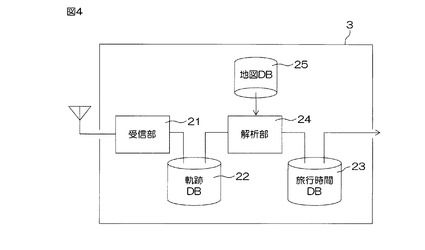
図4は、走行情報収集センタ3のブロック図を示す。走行情報収集センタ3は、特定車両の車載装置1から得られる走行データを受信する受信部21、各走行データに基づいて各特定車両の軌跡情報を記憶する軌跡データベース22、道路地図データを記憶する地図データベース25、道路地図データと各特定車両の軌跡情報とに基づいて、地点間旅行時間等を算出する解析部24、算出された旅行時間のデータを蓄積する旅行時間データベース23を備えている。
【0026】
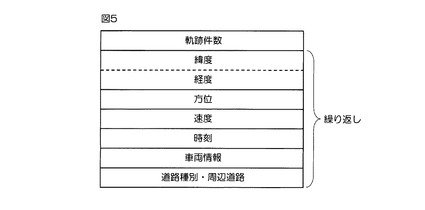
図5は、一次メモリ17に記憶される走行データの記憶フォーマットの一例を示す。
走行データの記憶フォーマットは、軌跡件数、緯度経度、方位、速度、時刻、車両情報、道路種別・周辺道路の各データによって構成される。
前記記憶フォーマットにおいて、軌跡件数は、本ファイルに含まれる測定開始から測定終了までの軌跡データ測定の件数を示す。緯度/経度は、GPS処理部13から得られたデータ収集地点の緯度/経度を示す。方位は、車載装置から得られた車両の方位である。速度は、車両情報管理部15から取得した車速パルスに基づいて算出し記憶する。
【0027】
車両情報は、前回から一部でも変化があるかどうかで表現する。すなわち、ワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、ドア開閉機構などの各種システムのうち1つでも作動状況が変化すれば、「変化あり=1」とし、各種システムのいずれも作動状況が変化しなければ「変化なし=0」とする。燃費の場合は、前回の燃費との差が所定の閾値を越えたかどうかによって判断する。閾値を越えた場合「変化あり=1」とし、閾値を超えていなければ「変化なし=0」とする。この「変化あり=1」と「変化なし=0」の差(1−0=1或いは0−1=−1)が車両情報の変化量に相当する。
【0028】
道路種別は、車載ナビゲーション装置側で道路にマッチングしている場合に判明している道路種別を設定する。例えば、有料道路、一般道路、細街路などとする。
周辺道路の有無は、道路にマッチングしている場合に地図データベース14に基づいて所定距離以内に周辺道路が存在するかしないかで判定する。周辺道路とは、(1)当該車両が走行している道路から所定距離以内に位置する道路と定義してもよく、(2)当該車両が走行している道路から所定距離以内にあり当該道路につながっている道路と定義してもよい。
【0029】
この特定車両の走行データは、車載装置1が路上装置2の近くを走行したときに車載装置1から送信され、路上装置2で受信され、走行情報収集センタ3に蓄積される。
本発明の実施形態では、単調な形状の道路を走行しているときにデータを選別しないことにより送信するデータ量を削減する。選別の方法は限定されないが、例えば(1)収集した軌跡データを一次メモリ17に記憶しておき、一次メモリ17に記憶したデータに対して、以下説明するデータ選別アルゴリズムを適用して一部のデータのみを適時送信用メモリ18に格納し、この送信用メモリ18に記憶されたデータを送信する方法、(2)収集した軌跡データを一次メモリ17に記憶しておき、一次メモリ17に記憶したデータに対して、データ選別アルゴリズムを適用して一部のデータを選別(マーク付け)し、適時、当該マーク付けさたデータのみを送信用メモリ18に記憶し、この送信用メモリ18に記憶されたデータを送信する方法、などがある。
【0030】
ここでは、(1)の方法を想定して、データ選別アルゴリズムについて説明を進める。
単調な形状の道路とは、「直線形状の道路」又は「単調に曲がっている道路」をいう。例えば、以下の方法によって判定する。
データサンプリング道路区間を添え字iで表し、連続する3つの特定車両の方位をそれぞれ θ(i-2), θ(i-1), θ(i) とする(ただし、i は整数)。このときi番目のサンプリング道路区間における方位θ(i)とi−1番目のサンプリング道路区間における方位θ(i-1)との差α(i)を定義する。
【0031】
α(i) = θ(i) − θ(i-1)
α(i)とα(i-1)との差:[α(i)−α(i-1)]は、サンプリング道路区間iにおける道路方位の変化量を表す。そして式
−δ(T)<[α(i) −α(i-1) ]<δ(T) (1)
を満たすとき単調な形状の道路と判定する。ここで、δ(T)は許容誤差を表す。
【0032】
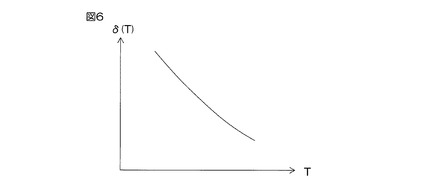
許容誤差δ(T)は、図6に示すように、サンプリング時間Tに依存する関数とする。サンプリング時間Tが長いほど小さな値をとり、サンプリング時間Tが短いほど大きな値をとる。これは、粗くサンプリングしている場合単調な形状の道路と判定する機会を減らし、小刻みにサンプリングしている場合単調な形状の道路と判定する機会を増やすためである。
【0033】
また、許容誤差δ(T)は、この走行道路の道路種別に依存する関数とすることが望ましい。例えば、高速道路では、走行軌跡は通常一般道路よりも緩やかに変化するので、方位差の変化量を判定する場合の閾値である許容誤差δ(T)を小さくする。一般道路では、走行軌跡は車線変更などがあっても変化するので、方位差の変化量を判定する閾値である許容誤差δ(T)を大きくする。これにより、道路形状の変化を適切に判定できる。
【0034】
また、前記許容誤差δ(T)を、走行道路の周辺道路が存在するかどうかに依存させてもよい。周辺道路が存在するときは、車両の走行軌跡を細かく把握し、走行規制の再現性を高めることが、正確な旅行時間などを得るために望ましいからである。周辺道路が存在しない時は、旅行時間計算などのため地図マッチングを行っても他の道路に誤マッチングすることは少ないため、許容誤差を大きくとることができ、よりデータ量の削減が期待できる。
【0035】
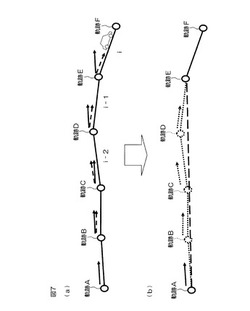
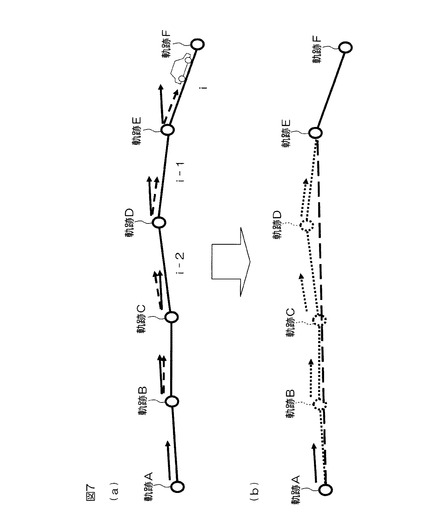
図7は、特定車両の軌跡例を示す図である。各サンプリング時点の特定車両の位置を「軌跡A」「軌跡B」などとい、白丸で表している。隣接する軌跡間の道路を「サンプリング道路区間i」という。iは−1,0,1,2,3などの整数である。サンプリング道路区間に沿った実線矢印は1つ前のサンプリング道路区間における特定車両の方位、破線矢印は当該サンプリング道路区間における特定車両の方位を示す。
【0036】
図7(a)に示される軌跡Aを通過後に、軌跡データを送信したとする。その後、軌跡B,C,・・を通過したとき、そのサンプリング道路区間のαと一つ前のサンプリング道路区間におけるαとの差、すなわち当該サンプリング道路区間における道路方位の変化量がそれぞれ前記(1)式を満たしていたとする。前記(1)式を満たしている間、道路変化が単調である(この場合真っ直ぐな道路が続いている)と判断して、図7(b)の破線に示されるように軌跡データを選別しない。軌跡Eを通過した後のサンプリング道路区間iにおいて、α(i)とα(i-1)との差が前記(1)式を満たさなくなったとする。このとき、道路変化が単調でなくなったと判断して、図7(b)の実線に示されるように軌跡データを選別する。
【0037】
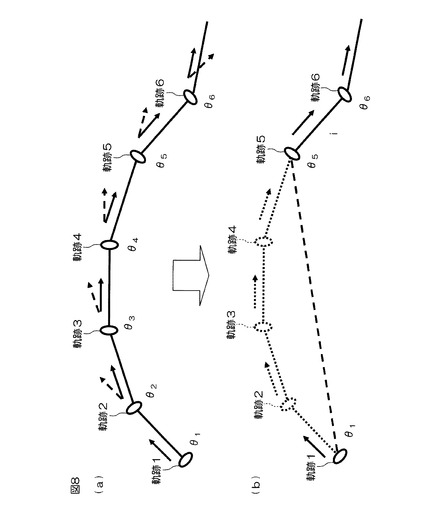
図8は、単調に曲がっている道路を走行する特定車両の軌跡図である。
図8(a)に示されるように、各サンプリング時点の特定車両の位置を「軌跡1」「軌跡2」などという。軌跡1を通過した後に、走行データを送信したとする。その後、軌跡2,3,・・を通過したとき、そのサンプリング道路区間のαと一つ前のサンプリング道路区間におけるαとの差、すなわち当該サンプリング道路区間における道路方位の変化量がそれぞれ前記(1)式を満たしていたとする。前記(1)式を満たしている間、道路変化が単調である(この場合同じ曲率の曲線道路が続いている)と判断して、軌跡データを選別しない。選別されない座標を図6(b)の破線に示している。軌跡5を通過した後のサンプリング道路区間iにおいて、α(i)とα(i-1)との差が前記(1)式を満たさなくなったとする。このとき、道路変化が単調でなくなった(この場合道路の曲率が大きく変化した)とみなして、図8(b)の実線に示されるように軌跡データを選別する。
【0038】
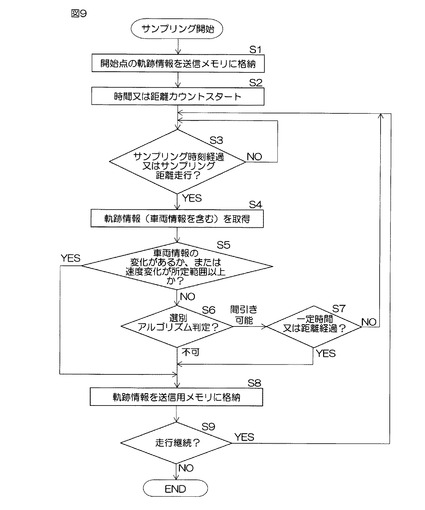
次に車両の走行中、車載装置1の走行データ管理部16が実行する、軌跡データの選別手順をフローチャート(図9)に基づいて説明する。
これらの手順の全部又は一部は、車載装置1にCD−ROMやハードディスクなど所定の媒体に記録されたプログラムを、処理装置のコンピュータが実行することにより実現される。
【0039】
特定車両が走行を開始して、軌跡データのサンプリングを開始する。サンプリング時間Tは一定であり、例えば前述したように1秒とする。まずサンプリング開始点の座標位置をGPS処理部13から取得し、送信用メモリ18に格納する(ステップS1)。
次にタイマー又は距離計をスタートさせる(ステップS2)。距離計の距離測定方法は、例えばGPS処理部13から得られる一連の位置信号に基づいて測定する。このタイマーで得られる時間情報又は距離計で得られる距離情報は、後に説明するステップS7で必要となる。
【0040】
サンプリング時間Tが経過するごとに(ステップS3)、車両情報管理部15から車両情報、車速データを取得する(ステップS4)。なお単位走行距離ごとにサンプリングを行う場合、ステップS3はサンプリング走行距離が経過するごとに、と読み替える。
次に車両情報、車速データの変化が所定範囲内であるかどうかを判定する(ステップS5)。「車両情報の変化」は、ワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、燃費、ドア開閉機構などの各種システムの作動状況の前回からの変化量をいう。また、「車速データの変化」は、速度変化が単位時間あたり所定の閾値以上になったかどうかで判定する。この判定基準を数式で表現すると、次のようになる。収集するサンプル時間をT、あるサンプリング区間の速度をv(i)、1つ前のサンプリング区間の速度をv(i-1) とすると、平均加速度a(i) は
a(i) = [v(i) −v(i-1) ] / T
で表現できる。所定閾値の正の上限を MAX_ACCEL、負の上限を MIN_ACCEL とすると、
MIN_ACCEL < a(i) < MAX_ACCEL (2)
を満たすとき、急加速も急減速も行わない正常走行とみなす。例えば閾値をT秒あたり20km/hとすれば、この車速データは前回の収集値から±20km/h以上変化すれば、変化ありとする。
【0041】
車両情報・車速データに変化がある場合、常に軌跡データを間引かないで選別する。この理由は、車両情報・車速データに変化があるときは、走行中に、ワイパーが作動したあるいは停止した場合、パーキングブレーキを利かせた場合或いは解除した場合、ABSシステムが働いたあるいは解除された場合、燃費が急に悪くなった或いはよくなった場合、ドアが開いた又は閉じた場合などの各種システムの作動状況が変化した場合、又は急減速、急加速を行った場合に相当するから、何らかの意味で異常な走行を行っている、正常な走行から異常な走行に変わった、あるいは異常な走行から正常な走行に戻ったと判断できる。したがって、この時点で当該車両の軌跡は、単調でなくなっていると推定できる。したがって、軌跡データを間引くことにすれば、軌跡情報の重要な部分が欠けてしまい、あとで走行情報収集センタ3での処理で再現された軌跡と、実際の軌跡との誤差が発生して、正確な旅行時間などが得られなくなるからである。
【0042】
車両情報・車速データに変化がない場合、データの間引きが可能かどうかの判定を行う(ステップS6)。この判定アルゴリズムは、前述したとおり、前記(1)式を使って行う。
データ間引き可能であれば、ステップS2でタイマー又は距離計をスタートさせた時点から一定時間、一定距離が経過しているかどうかの判定を行い(ステップS7)、経過していなければデータを収集しないで、ステップS3に戻る。この一定時間や一定距離は、ステップS2でカウントスタートした量である。一定時間、一定距離が経過したことを判定する理由は、あまりにも長時間若しくは長距離、間引きを続ければ、軌跡データが大きく欠落してしまい、走行情報収集センタ3での処理に支障を生じるからである。この一定時間は、例えば16サンプリングを行う時間とする。一定距離は、平均的な速度でその一定時間内に走行した距離に選べばよい。
【0043】
ステップS6やステップS7でデータ間引きが不可と判定されれば、間引きを行わないで当該軌跡データを一次メモリ17に格納する(ステップS8)。
ステップS5で車両情報の変化が所定範囲外である場合も、間引きを行わないで軌跡データを一次メモリ17に格納する(ステップS8)。ステップS5で車両情報・車速データに変化があると判定された場合も同様である。
【0044】
次に走行を継続しているかどうか判定し(ステップS9)、走行しているならばステップS3に戻り、次のサンプリングを待つ。
走行が停止されれば、本処理を抜ける。
このようにして、サンプリングした軌跡データを道路形状の単調さに基づいて、道路形状が単調であれば間引きすることとしたので、車両が路上装置2を通過したときに、車載装置1から路上装置2への通信容量を超えることなく、走行データを円滑に送信することができる。また、携帯電話機を用いた場合も送信量が少なくて済み、通信費用が少なくなる。
【0045】
以上で、本発明の実施の形態を説明したが、本発明の実施は、前記の形態に限定されるものではない。例えば、前記サンプリング時間Tは1秒に限られない。その他、本発明の範囲内で種々の変更を施すことが可能である。
【図面の簡単な説明】
【0046】
【図1】走行データ収集装置の一例である走行情報収集システムの全体構成を示す概略図である。
【図2】車載装置1の構成を示すブロック図である。
【図3】携帯電話機1aを用いた走行情報収集システムの全体構成を示す概略図である。
【図4】走行情報収集センタ3の構成を示すブロック図である。
【図5】一次メモリ17に記憶される走行データのフォーマットの一例を示す図である。
【図6】許容誤差δ(T)の関数形を示すグラフである。
【図7】特定車両の軌跡例(直線)を示す図である。
【図8】特定車両の軌跡例(曲線)を示す図である。
【図9】軌跡データの選別手順を示すフローチャートである。
【符号の説明】
【0047】
1 車載装置
1a 携帯電話機
1b 車載装置本体
2 路上装置
2a 基地局
3 走行情報収集センタ
11 無線部
12 通信制御部
13 GPS処理部
14 地図データベース
15 車両情報管理部
16 走行データ管理部
17 一次メモリ
18 送信用メモリ
【技術分野】
【0001】
本発明は、交通情報処理のために必要な走行データを収集して送信することのできる装置並びにその収集方法及びプログラムに関するものである。
ここで「走行データ」とは、特定車両に搭載された車載装置で取得した、所定時間ごと又は所定走行距離ごとの車両の位置、速度、方位、時刻等のデータである。また「特定車両」とは、交通情報収集のために必要な走行データを収集し送信することのできる特定の車載装置を搭載した車両をいう。また、「車両」とは自動車、原動機付自転車、軽車両及びトロリーバスをいう。「車載装置」とは車両に搭載され走行データを収集し送信する装置をいう。
【背景技術】
【0002】
旅行時間、渋滞度などの交通情報を算出処理するために特定車両から送信された走行データを利用するシステムが知られている。
このシステムでは車載装置で収集された走行データを送信する場合、携帯電話機などを使って広域無線回線網経由で送信することも、光ビーコン、無線LAN、DSRCなどの狭帯域通信方式を用いて送信することも可能である。後者では、路側に設置された路上装置でデータを受信し中継することになる。
【0003】
いずれの場合も、一回の特定車両からの送信では伝送可能な容量が限られている。
すなわち、特定車両では、一定のサンプリング間隔で走行データを収集しているが、低速走行時には走行データの蓄積量が膨大となってしまうと、全ての情報を一度に路上装置に送信できなくなる。また、携帯電話機で走行データを送信する場合、走行データの容量が大きいと通信費用が高くなる。
【0004】
一方、走行データの収集周期を粗くすれば、計測する交通情報の精度を維持することができなくなる。
このため、車両側では走行データを効率よく収集し送信することが求められている。
そこで、[非特許文献1]のように、送信される走行データを圧縮することによりデータの送信容量を低減する技術が提案されている。
【非特許文献1】電子情報通信学会技術研究報告Vol. 104, No. 762, pp. 13-18 (2005.03.22)
【発明の開示】
【発明が解決しようとする課題】
【0005】
前記非特許文献1の圧縮技術は、車両の走行道路の空間的な軌跡形状に着目してデータの間引き(この文献では「リサンプル」と言っている)を行うが、これにはまず「走行道路の空間的な軌跡形状」を把握しておかなければならない。このため、走行しようとする道路の曲率半径ρを、道路地図データなどに基づいて把握しておかなければならない。よって、車載装置のデータ処理負荷が増大し、車載装置の規模が大きくなり、高価になるという問題がある。
【0006】
そこで本発明は、走行道路の空間的な軌跡形状などを知らなくても送信するデータの間引きを、最小限の計算負荷で、かつリアルタイムに行うことにより、情報伝送効率を高めることのできる走行データ収集装置、その収集プログラム及び方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の走行データ収集装置は、車両の軌跡データ及び方位データを、当該車両の走行に従い複数取得するサンプリング手段と、ある時点の方位データとそれよりも過去の時点の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の時点の方位差との変化量が許容誤差内にあるかどうかを判定する判定手段と、当該車両から少なくともその時点の前記軌跡データを含む走行データを送信する送信手段と、管理手段とを備え、前記管理手段は、前記判定手段の判定により前記方位差の変化量が前記許容誤差を超えている場合に当該走行データを前記送信手段により送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合に当該走行データを前記送信手段により送信の対象としないことを特徴とする。
【0008】
この走行データ収集装置によれば、方位差の変化量が許容誤差を超えている場合に当該走行データを送信の対象とするが、許容誤差を超えていない場合は単調な形状の道路を走行していると判断して、当該走行データを前記送信手段により送信の対象としない。単調な形状の道路は、走行データを一部間引いても、その軌跡データの地図マッチングによる再現が可能である。したがって、車両から走行データを送信する容量を減らすことにより情報伝送効率を高めることができる。また、本発明では、道路形状を予め知っておかなくても、走行データを送信する、しないの判断ができるので、リアルタイムな情報伝送を実現することができる。
【0009】
なお、本発明の技術では、前記非特許文献1の圧縮技術と比較して、次の点で異なっている。非特許文献1は、曲率半径の大きさに応じてリサンプル長を決定している。すなわち、曲率半径が大きいときリサンプル長を長くし、曲率半径が小さいときリサンプル長を短くしている。したがって、曲率半径が小さいけれども、ほぼ一定の曲率半径が続く単調なカーブの道路の場合、非特許文献1の技術では、リサンプル長は短くなる。ところが本発明では、ほぼ一定の曲率半径が続く単調なカーブの道路の場合、曲率半径の大きい小さいに係わらず、リサンプル長は長くなる。このため、本発明の技術では、非特許文献1に比べ、データを間引く機会がさらに増加する。従って、送信するデータ量をさらに減らすことができる。
【0010】
当該車両が前回の送信から所定時間走行した場合又は所定距離走行した場合、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることが好ましい。これは、方位差の変化量が許容誤差を超えない条件が長時間若しくは長距離続いた場合に走行データの送信が長く途絶えることを防ぐためである。
【0011】
また当該車両の車両情報を検出する車両情報検出手段をさらに含み、ある時点の車両情報とそれよりも過去の時点の車両情報との変化量が所定範囲内にあるかどうかを判定し、車両情報の変化量が前記所定範囲を超えているならば、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることも可能である。この車両情報として、ワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、燃費、ドア開閉機構などの各車載システムの使用状況の情報がある。
【0012】
また 当該車両の速度の変化量が所定範囲内にあるかどうかを判定し、速度の変化量が前記所定範囲を超えているならば、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることも可能である。車両が大きく加速、減速しているとき、速度の変化量が大きくなるが、この場合に、当該走行データを前記送信手段により送信の対象とすることで、例えば直線道路上でストップ/ゴーをくりかえしても、その車両の挙動を正確に再現できる。
【0013】
当該車両の走行している道路の道路種別を検出し、前記許容誤差を、この走行道路の道路種別に依存する関数としてもよい。例えば高速道路では、走行軌跡は通常一般道路よりも緩やかに変化するので、方位差の変化量を判定する場合の閾値である許容誤差を小さくすることができる。これにより、道路形状の変化を適切に判定できる。
また 当該車両の走行している道路の周辺に道路があるかどうかを検出し、前記許容誤差を、この周辺道路の有無に依存する関数としてもよい。周辺道路とは、当該車両が走行している道路から所定距離以内にある道路、当該車両が走行している道路から所定距離以内で当該道路につながっている道路、などをいう。周辺道路が存在するときは、車両の走行軌跡を細かく把握し、走行規制の再現性を高めることが、正確な旅行時間などを得るために望ましいからである。周辺道路が存在しない時は、旅行時間計算などのため地図マッチングを行っても他の道路に誤マッチングすることは少ないため、許容誤差を大きくとることができ、よりデータ量の削減が期待できる。
【0014】
前記許容誤差は、車両の軌跡データのサンプリング間隔が広ければ大きく、サンプリング間隔が狭ければ小さく設定することが望ましい。これは、粗くサンプリングしている場合単調な形状の道路と判定する機会を減らし、小刻みにサンプリングしている場合単調な形状の道路と判定する機会を増やすためである。
前記判定手段の判定基準を式で表現すると、次のようになる。ある時点の方位をθi、それよりも過去の時点の方位をθi-1、その時点の方位差とそれよりも過去の時点の方位差との変化量をα(i) (α(i)=θi−θi-1) 、許容誤差をδと表記した場合、
−δ<[α(i) −α(i-1) ]<δ
となる。
【0015】
また本発明の走行データ収集プログラムは、車載コンピュータに格納されることによって、車両から当該車両の走行データを送信することができるプログラムであって、実質的に前記走行データ収集装置の機能を実現するためのプログラムである。
本発明の走行データ収集方法は、実質的に前記走行データ収集装置の機能を実現するための方法である。
【発明の効果】
【0016】
以上のように本発明によれば、道路形状が単調な場合に一部の走行データを送信しないことにより、送信データ量を削減することができるとともに、間引かれたデータを用いても十分地図マッチング精度を維持することができる。したがって、送信された走行データを旅行時間計算などのために活用することができる。
また、走行データの送信料を、走行データを利用している一般ユーザが負担している場合、データの送信量を削減することで、一般ユーザへの負担を軽減することもできる。
【発明を実施するための最良の形態】
【0017】
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
図1は、本発明の走行データ収集装置の一例である走行情報収集システムの全体構成を示す概略図である。
この走行情報収集システムは、特定車両の位置、速度、方位などの走行データを走行情報収集センタに送信し、走行情報収集センタでは、収集した走行データを処理することによって、さまざまな交通情報を取得して利用するシステムをいう。
【0018】
この明細書では、特定車両内のワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、燃費、ドア開閉機構などの各種システムの作動状況の情報を「車両情報」という。
走行情報収集システムは、図1に示されるように、車載装置1と、道路脇に設置された路上装置2と、走行情報収集センタ3とを備えている。
【0019】
車載装置1は、各特定車両に搭載され、当該車両の識別、車種の識別のためのコードを持っている。車載装置1は路上装置2と通信することができる。車載装置1は、サンプリング時間T(例えば1秒)ごとに時刻、当該車両の位置、速度、方位等のデータや車両情報を取得する。取得されたデータは、車載装置1から送信される。なお、単位時間あたりでなく単位走行距離ごとにサンプリングを行っても良い。
【0020】
路上装置2は、超音波感知器などを用いて交通情報の作成対象となる道路の交通量(単位時間あたりの通過台数)等を測定するとともに、車載装置1から取得される走行データを収集して、走行情報収集センタ3に転送する。
走行情報収集センタ3は、図1に示したように、路上装置2とは別の場所に設置され、通信回線でつながれている。なお、路上装置2と同一の場所に設置されていてもよい。
【0021】
車載装置1と路上装置2との間の路車間通信の方式としては、光ビーコン、無線LAN、DSRC(Dedicated Short Range Communication)等の、比較的エリアの狭い、双方向通信方式を用いることができる。
図2は、車載装置1の内部構成を示すブロック図である。
車載装置1は、路上装置2との間で路車間通信を行う無線部11、通信制御を行う通信制御部12、人工衛星の電波を利用して時刻ごとの車両位置検出を行うGPS処理部13、地図上の位置を見つけるための地図データベース14、車輪速センサ等からの車速パルス等に基づいて車両の車速データ、加車速データ等を得るとともに、ワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、燃費、ドア開閉機構など各種の車両情報を取得する車両情報管理部15を備えている。
【0022】
さらに、車載装置1は、GPS処理部13から取得した車両位置情報、車両情報管理部15から取得した車両の車速データ、加車速データ等を走行データとして管理するとともに、車両情報管理部15から取得した車両情報を管理する走行データ管理部16、管理されている走行データを一時的に保存する一次メモリ17、一次メモリ17に保存されている走行データの中から送信するデータを選別して一時的に保存する送信用メモリ18を備えている。前記「選別する」とは、この発明の実施形態では、後述するデータ選別アルゴリズムを用いて、一次メモリ17に保存されている走行データの一部を選別すること、すなわち間引くことをいう。この送信用メモリ18に保存されている走行データは、車両が路上装置2の側を通過したときに、車載装置1から送信され、路上装置2を経由して走行情報収集センタ3に提供される。
【0023】
なお、いままでの説明では、車載装置1として路上装置2を経由して通信するシステムを想定してきた。
しかし、車載装置は走行データを走行情報収集センタ3に送信する機能を有するものであれば、どのような通信方式を採用した装置であってもよい。たとえば、路上装置2との間で路車間通信を行う無線部11の機能、通信制御を行う通信制御部12の機能を、簡単に車両に持ち込める携帯電話機を用いて実現してもよい。
【0024】
図3は、このような携帯電話機1aを用いた走行情報収集システムの全体構成を示す概略図である。このシステムでは、車載装置1の無線部11の機能および通信制御部12の機能を、携帯電話機1aで実現している。図3に“1b”で示したブロック(車載装置本体という)は、車載装置1から、無線部11の機能、通信制御部12の機能を除いた部分を示している。携帯電話機1aの送信電波は通常マイクロ波であり、この電波は基地局2aで受信され、公衆通信回線2bを使って走行情報収集センタ3に集められることになる。なお、通信制御部12の機能は、携帯電話機1aでなく車載装置本体1bに受け持たせてもよい。
【0025】
図4は、走行情報収集センタ3のブロック図を示す。走行情報収集センタ3は、特定車両の車載装置1から得られる走行データを受信する受信部21、各走行データに基づいて各特定車両の軌跡情報を記憶する軌跡データベース22、道路地図データを記憶する地図データベース25、道路地図データと各特定車両の軌跡情報とに基づいて、地点間旅行時間等を算出する解析部24、算出された旅行時間のデータを蓄積する旅行時間データベース23を備えている。
【0026】
図5は、一次メモリ17に記憶される走行データの記憶フォーマットの一例を示す。
走行データの記憶フォーマットは、軌跡件数、緯度経度、方位、速度、時刻、車両情報、道路種別・周辺道路の各データによって構成される。
前記記憶フォーマットにおいて、軌跡件数は、本ファイルに含まれる測定開始から測定終了までの軌跡データ測定の件数を示す。緯度/経度は、GPS処理部13から得られたデータ収集地点の緯度/経度を示す。方位は、車載装置から得られた車両の方位である。速度は、車両情報管理部15から取得した車速パルスに基づいて算出し記憶する。
【0027】
車両情報は、前回から一部でも変化があるかどうかで表現する。すなわち、ワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、ドア開閉機構などの各種システムのうち1つでも作動状況が変化すれば、「変化あり=1」とし、各種システムのいずれも作動状況が変化しなければ「変化なし=0」とする。燃費の場合は、前回の燃費との差が所定の閾値を越えたかどうかによって判断する。閾値を越えた場合「変化あり=1」とし、閾値を超えていなければ「変化なし=0」とする。この「変化あり=1」と「変化なし=0」の差(1−0=1或いは0−1=−1)が車両情報の変化量に相当する。
【0028】
道路種別は、車載ナビゲーション装置側で道路にマッチングしている場合に判明している道路種別を設定する。例えば、有料道路、一般道路、細街路などとする。
周辺道路の有無は、道路にマッチングしている場合に地図データベース14に基づいて所定距離以内に周辺道路が存在するかしないかで判定する。周辺道路とは、(1)当該車両が走行している道路から所定距離以内に位置する道路と定義してもよく、(2)当該車両が走行している道路から所定距離以内にあり当該道路につながっている道路と定義してもよい。
【0029】
この特定車両の走行データは、車載装置1が路上装置2の近くを走行したときに車載装置1から送信され、路上装置2で受信され、走行情報収集センタ3に蓄積される。
本発明の実施形態では、単調な形状の道路を走行しているときにデータを選別しないことにより送信するデータ量を削減する。選別の方法は限定されないが、例えば(1)収集した軌跡データを一次メモリ17に記憶しておき、一次メモリ17に記憶したデータに対して、以下説明するデータ選別アルゴリズムを適用して一部のデータのみを適時送信用メモリ18に格納し、この送信用メモリ18に記憶されたデータを送信する方法、(2)収集した軌跡データを一次メモリ17に記憶しておき、一次メモリ17に記憶したデータに対して、データ選別アルゴリズムを適用して一部のデータを選別(マーク付け)し、適時、当該マーク付けさたデータのみを送信用メモリ18に記憶し、この送信用メモリ18に記憶されたデータを送信する方法、などがある。
【0030】
ここでは、(1)の方法を想定して、データ選別アルゴリズムについて説明を進める。
単調な形状の道路とは、「直線形状の道路」又は「単調に曲がっている道路」をいう。例えば、以下の方法によって判定する。
データサンプリング道路区間を添え字iで表し、連続する3つの特定車両の方位をそれぞれ θ(i-2), θ(i-1), θ(i) とする(ただし、i は整数)。このときi番目のサンプリング道路区間における方位θ(i)とi−1番目のサンプリング道路区間における方位θ(i-1)との差α(i)を定義する。
【0031】
α(i) = θ(i) − θ(i-1)
α(i)とα(i-1)との差:[α(i)−α(i-1)]は、サンプリング道路区間iにおける道路方位の変化量を表す。そして式
−δ(T)<[α(i) −α(i-1) ]<δ(T) (1)
を満たすとき単調な形状の道路と判定する。ここで、δ(T)は許容誤差を表す。
【0032】
許容誤差δ(T)は、図6に示すように、サンプリング時間Tに依存する関数とする。サンプリング時間Tが長いほど小さな値をとり、サンプリング時間Tが短いほど大きな値をとる。これは、粗くサンプリングしている場合単調な形状の道路と判定する機会を減らし、小刻みにサンプリングしている場合単調な形状の道路と判定する機会を増やすためである。
【0033】
また、許容誤差δ(T)は、この走行道路の道路種別に依存する関数とすることが望ましい。例えば、高速道路では、走行軌跡は通常一般道路よりも緩やかに変化するので、方位差の変化量を判定する場合の閾値である許容誤差δ(T)を小さくする。一般道路では、走行軌跡は車線変更などがあっても変化するので、方位差の変化量を判定する閾値である許容誤差δ(T)を大きくする。これにより、道路形状の変化を適切に判定できる。
【0034】
また、前記許容誤差δ(T)を、走行道路の周辺道路が存在するかどうかに依存させてもよい。周辺道路が存在するときは、車両の走行軌跡を細かく把握し、走行規制の再現性を高めることが、正確な旅行時間などを得るために望ましいからである。周辺道路が存在しない時は、旅行時間計算などのため地図マッチングを行っても他の道路に誤マッチングすることは少ないため、許容誤差を大きくとることができ、よりデータ量の削減が期待できる。
【0035】
図7は、特定車両の軌跡例を示す図である。各サンプリング時点の特定車両の位置を「軌跡A」「軌跡B」などとい、白丸で表している。隣接する軌跡間の道路を「サンプリング道路区間i」という。iは−1,0,1,2,3などの整数である。サンプリング道路区間に沿った実線矢印は1つ前のサンプリング道路区間における特定車両の方位、破線矢印は当該サンプリング道路区間における特定車両の方位を示す。
【0036】
図7(a)に示される軌跡Aを通過後に、軌跡データを送信したとする。その後、軌跡B,C,・・を通過したとき、そのサンプリング道路区間のαと一つ前のサンプリング道路区間におけるαとの差、すなわち当該サンプリング道路区間における道路方位の変化量がそれぞれ前記(1)式を満たしていたとする。前記(1)式を満たしている間、道路変化が単調である(この場合真っ直ぐな道路が続いている)と判断して、図7(b)の破線に示されるように軌跡データを選別しない。軌跡Eを通過した後のサンプリング道路区間iにおいて、α(i)とα(i-1)との差が前記(1)式を満たさなくなったとする。このとき、道路変化が単調でなくなったと判断して、図7(b)の実線に示されるように軌跡データを選別する。
【0037】
図8は、単調に曲がっている道路を走行する特定車両の軌跡図である。
図8(a)に示されるように、各サンプリング時点の特定車両の位置を「軌跡1」「軌跡2」などという。軌跡1を通過した後に、走行データを送信したとする。その後、軌跡2,3,・・を通過したとき、そのサンプリング道路区間のαと一つ前のサンプリング道路区間におけるαとの差、すなわち当該サンプリング道路区間における道路方位の変化量がそれぞれ前記(1)式を満たしていたとする。前記(1)式を満たしている間、道路変化が単調である(この場合同じ曲率の曲線道路が続いている)と判断して、軌跡データを選別しない。選別されない座標を図6(b)の破線に示している。軌跡5を通過した後のサンプリング道路区間iにおいて、α(i)とα(i-1)との差が前記(1)式を満たさなくなったとする。このとき、道路変化が単調でなくなった(この場合道路の曲率が大きく変化した)とみなして、図8(b)の実線に示されるように軌跡データを選別する。
【0038】
次に車両の走行中、車載装置1の走行データ管理部16が実行する、軌跡データの選別手順をフローチャート(図9)に基づいて説明する。
これらの手順の全部又は一部は、車載装置1にCD−ROMやハードディスクなど所定の媒体に記録されたプログラムを、処理装置のコンピュータが実行することにより実現される。
【0039】
特定車両が走行を開始して、軌跡データのサンプリングを開始する。サンプリング時間Tは一定であり、例えば前述したように1秒とする。まずサンプリング開始点の座標位置をGPS処理部13から取得し、送信用メモリ18に格納する(ステップS1)。
次にタイマー又は距離計をスタートさせる(ステップS2)。距離計の距離測定方法は、例えばGPS処理部13から得られる一連の位置信号に基づいて測定する。このタイマーで得られる時間情報又は距離計で得られる距離情報は、後に説明するステップS7で必要となる。
【0040】
サンプリング時間Tが経過するごとに(ステップS3)、車両情報管理部15から車両情報、車速データを取得する(ステップS4)。なお単位走行距離ごとにサンプリングを行う場合、ステップS3はサンプリング走行距離が経過するごとに、と読み替える。
次に車両情報、車速データの変化が所定範囲内であるかどうかを判定する(ステップS5)。「車両情報の変化」は、ワイパー、パーキングブレーキ、ハザードランプ、ABSシステム、燃費、ドア開閉機構などの各種システムの作動状況の前回からの変化量をいう。また、「車速データの変化」は、速度変化が単位時間あたり所定の閾値以上になったかどうかで判定する。この判定基準を数式で表現すると、次のようになる。収集するサンプル時間をT、あるサンプリング区間の速度をv(i)、1つ前のサンプリング区間の速度をv(i-1) とすると、平均加速度a(i) は
a(i) = [v(i) −v(i-1) ] / T
で表現できる。所定閾値の正の上限を MAX_ACCEL、負の上限を MIN_ACCEL とすると、
MIN_ACCEL < a(i) < MAX_ACCEL (2)
を満たすとき、急加速も急減速も行わない正常走行とみなす。例えば閾値をT秒あたり20km/hとすれば、この車速データは前回の収集値から±20km/h以上変化すれば、変化ありとする。
【0041】
車両情報・車速データに変化がある場合、常に軌跡データを間引かないで選別する。この理由は、車両情報・車速データに変化があるときは、走行中に、ワイパーが作動したあるいは停止した場合、パーキングブレーキを利かせた場合或いは解除した場合、ABSシステムが働いたあるいは解除された場合、燃費が急に悪くなった或いはよくなった場合、ドアが開いた又は閉じた場合などの各種システムの作動状況が変化した場合、又は急減速、急加速を行った場合に相当するから、何らかの意味で異常な走行を行っている、正常な走行から異常な走行に変わった、あるいは異常な走行から正常な走行に戻ったと判断できる。したがって、この時点で当該車両の軌跡は、単調でなくなっていると推定できる。したがって、軌跡データを間引くことにすれば、軌跡情報の重要な部分が欠けてしまい、あとで走行情報収集センタ3での処理で再現された軌跡と、実際の軌跡との誤差が発生して、正確な旅行時間などが得られなくなるからである。
【0042】
車両情報・車速データに変化がない場合、データの間引きが可能かどうかの判定を行う(ステップS6)。この判定アルゴリズムは、前述したとおり、前記(1)式を使って行う。
データ間引き可能であれば、ステップS2でタイマー又は距離計をスタートさせた時点から一定時間、一定距離が経過しているかどうかの判定を行い(ステップS7)、経過していなければデータを収集しないで、ステップS3に戻る。この一定時間や一定距離は、ステップS2でカウントスタートした量である。一定時間、一定距離が経過したことを判定する理由は、あまりにも長時間若しくは長距離、間引きを続ければ、軌跡データが大きく欠落してしまい、走行情報収集センタ3での処理に支障を生じるからである。この一定時間は、例えば16サンプリングを行う時間とする。一定距離は、平均的な速度でその一定時間内に走行した距離に選べばよい。
【0043】
ステップS6やステップS7でデータ間引きが不可と判定されれば、間引きを行わないで当該軌跡データを一次メモリ17に格納する(ステップS8)。
ステップS5で車両情報の変化が所定範囲外である場合も、間引きを行わないで軌跡データを一次メモリ17に格納する(ステップS8)。ステップS5で車両情報・車速データに変化があると判定された場合も同様である。
【0044】
次に走行を継続しているかどうか判定し(ステップS9)、走行しているならばステップS3に戻り、次のサンプリングを待つ。
走行が停止されれば、本処理を抜ける。
このようにして、サンプリングした軌跡データを道路形状の単調さに基づいて、道路形状が単調であれば間引きすることとしたので、車両が路上装置2を通過したときに、車載装置1から路上装置2への通信容量を超えることなく、走行データを円滑に送信することができる。また、携帯電話機を用いた場合も送信量が少なくて済み、通信費用が少なくなる。
【0045】
以上で、本発明の実施の形態を説明したが、本発明の実施は、前記の形態に限定されるものではない。例えば、前記サンプリング時間Tは1秒に限られない。その他、本発明の範囲内で種々の変更を施すことが可能である。
【図面の簡単な説明】
【0046】
【図1】走行データ収集装置の一例である走行情報収集システムの全体構成を示す概略図である。
【図2】車載装置1の構成を示すブロック図である。
【図3】携帯電話機1aを用いた走行情報収集システムの全体構成を示す概略図である。
【図4】走行情報収集センタ3の構成を示すブロック図である。
【図5】一次メモリ17に記憶される走行データのフォーマットの一例を示す図である。
【図6】許容誤差δ(T)の関数形を示すグラフである。
【図7】特定車両の軌跡例(直線)を示す図である。
【図8】特定車両の軌跡例(曲線)を示す図である。
【図9】軌跡データの選別手順を示すフローチャートである。
【符号の説明】
【0047】
1 車載装置
1a 携帯電話機
1b 車載装置本体
2 路上装置
2a 基地局
3 走行情報収集センタ
11 無線部
12 通信制御部
13 GPS処理部
14 地図データベース
15 車両情報管理部
16 走行データ管理部
17 一次メモリ
18 送信用メモリ
【特許請求の範囲】
【請求項1】
車両の軌跡データ及び方位データを、当該車両の走行に従い複数取得するサンプリング手段と、
ある時点の方位データとそれよりも過去の時点の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の時点の方位差との変化量が許容誤差内にあるかどうかを判定する判定手段と、
当該車両から少なくともその時点の前記軌跡データを含む走行データを送信する送信手段と、
管理手段とを備え、
前記管理手段は、前記判定手段の判定により前記方位差の変化量が前記許容誤差を超えている場合に当該走行データを前記送信手段による送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合に当該走行データを前記送信手段による送信の対象としないことを特徴とする走行データ収集装置。
【請求項2】
当該車両の走行時間又は走行距離を検出する走行量検出手段をさらに含み、
当該車両前回の送信から所定時間走行した場合又は所定距離走行した場合、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることを特徴とする請求項1記載の走行データ収集装置。
【請求項3】
当該車両の車両情報を検出する車両情報検出手段をさらに含み、
ある時点の車両情報とそれよりも過去の時点の車両情報との変化量が所定範囲内にあるかどうかを判定する第二の判定手段をさらに含み、
前記管理手段は、前記第二の判定手段の判定により車両情報の変化量が前記所定範囲を超えているならば、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることを特徴とする請求項1又は請求項2記載の走行データ収集装置。
【請求項4】
当該車両の速度情報を検出する速度情報検出手段をさらに含み、
速度の変化量が所定範囲内にあるかどうかを判定する第三の判定手段をさらに含み、
前記管理手段は、前記第三の判定手段の判定により速度の変化量が前記所定範囲を超えているならば、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることを特徴とする請求項1又は請求項2記載の走行データ収集装置。
【請求項5】
当該車両の走行している道路の道路種別を検出する道路種別検出手段をさらに含み、
前記許容誤差を、この走行道路の道路種別に依存する関数とする請求項1から請求項4のいずれかに記載の走行データ収集装置。
【請求項6】
当該車両の走行している道路の周辺に道路があるかどうかを検出する周辺道路検出手段をさらに含み、
前記許容誤差を、この周辺道路の有無に依存する関数とする請求項1から請求項4のいずれかに記載の走行データ収集装置。
【請求項7】
車載コンピュータに格納されることによって、車両から当該車両の走行データを送信することができるプログラムであって、
少なくとも車両の軌跡データ及び方位データを、当該車両の走行に従い複数サンプリングするステップと、
ある時点の方位データとそれよりも過去の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の方位差との変化量が許容誤差内にあるかどうかを判定するステップと、
当該車両から少なくともその時点の前記軌跡データを含む走行データを送信するステップとを有し、
前記判定するステップにおいて、前記方位差の変化量が前記許容誤差を超えている場合に当該走行データを前記送信手段により送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合に当該走行データを前記送信手段により送信の対象としないことを特徴とする走行データ収集プログラム。
【請求項8】
少なくとも車両の軌跡データ及び方位データを、当該車両の走行に従い複数取得し、
ある時点の方位データとそれよりも過去の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の方位差との変化量が許容誤差内にあるかどうかを判定し、
前記判定により前記方位差の変化量が前記許容誤差を超えている場合にその時点の当該軌跡データを含む走行データを送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合に当該軌跡データを含む走行データを送信の対象としないで、当該車両から前記送信の対象となった走行データを送信することを特徴とする走行データ収集方法。
【請求項1】
車両の軌跡データ及び方位データを、当該車両の走行に従い複数取得するサンプリング手段と、
ある時点の方位データとそれよりも過去の時点の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の時点の方位差との変化量が許容誤差内にあるかどうかを判定する判定手段と、
当該車両から少なくともその時点の前記軌跡データを含む走行データを送信する送信手段と、
管理手段とを備え、
前記管理手段は、前記判定手段の判定により前記方位差の変化量が前記許容誤差を超えている場合に当該走行データを前記送信手段による送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合に当該走行データを前記送信手段による送信の対象としないことを特徴とする走行データ収集装置。
【請求項2】
当該車両の走行時間又は走行距離を検出する走行量検出手段をさらに含み、
当該車両前回の送信から所定時間走行した場合又は所定距離走行した場合、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることを特徴とする請求項1記載の走行データ収集装置。
【請求項3】
当該車両の車両情報を検出する車両情報検出手段をさらに含み、
ある時点の車両情報とそれよりも過去の時点の車両情報との変化量が所定範囲内にあるかどうかを判定する第二の判定手段をさらに含み、
前記管理手段は、前記第二の判定手段の判定により車両情報の変化量が前記所定範囲を超えているならば、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることを特徴とする請求項1又は請求項2記載の走行データ収集装置。
【請求項4】
当該車両の速度情報を検出する速度情報検出手段をさらに含み、
速度の変化量が所定範囲内にあるかどうかを判定する第三の判定手段をさらに含み、
前記管理手段は、前記第三の判定手段の判定により速度の変化量が前記所定範囲を超えているならば、前記方位差の変化量と前記許容誤差との関係にかかわらず、当該走行データを前記送信手段により送信の対象とすることを特徴とする請求項1又は請求項2記載の走行データ収集装置。
【請求項5】
当該車両の走行している道路の道路種別を検出する道路種別検出手段をさらに含み、
前記許容誤差を、この走行道路の道路種別に依存する関数とする請求項1から請求項4のいずれかに記載の走行データ収集装置。
【請求項6】
当該車両の走行している道路の周辺に道路があるかどうかを検出する周辺道路検出手段をさらに含み、
前記許容誤差を、この周辺道路の有無に依存する関数とする請求項1から請求項4のいずれかに記載の走行データ収集装置。
【請求項7】
車載コンピュータに格納されることによって、車両から当該車両の走行データを送信することができるプログラムであって、
少なくとも車両の軌跡データ及び方位データを、当該車両の走行に従い複数サンプリングするステップと、
ある時点の方位データとそれよりも過去の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の方位差との変化量が許容誤差内にあるかどうかを判定するステップと、
当該車両から少なくともその時点の前記軌跡データを含む走行データを送信するステップとを有し、
前記判定するステップにおいて、前記方位差の変化量が前記許容誤差を超えている場合に当該走行データを前記送信手段により送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合に当該走行データを前記送信手段により送信の対象としないことを特徴とする走行データ収集プログラム。
【請求項8】
少なくとも車両の軌跡データ及び方位データを、当該車両の走行に従い複数取得し、
ある時点の方位データとそれよりも過去の方位データとに基づいて方位差を求め、その時点の方位差とそれよりも過去の方位差との変化量が許容誤差内にあるかどうかを判定し、
前記判定により前記方位差の変化量が前記許容誤差を超えている場合にその時点の当該軌跡データを含む走行データを送信の対象とし、前記方位差の変化量が前記許容誤差を超えていない場合に当該軌跡データを含む走行データを送信の対象としないで、当該車両から前記送信の対象となった走行データを送信することを特徴とする走行データ収集方法。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−146151(P2008−146151A)
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2006−329502(P2006−329502)
【出願日】平成18年12月6日(2006.12.6)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成18年12月6日(2006.12.6)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]